mahalakshmi - pdf4pro
TRANSCRIPT
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 1
MAHALAKSHMI
ENGINEERING COLLEGE
TIRUCHIRAPALLI – 621213 QUESTION BANK
DEPARTMENT: EEE SEMESTER: III
Subject code / Name: Measurement and Instrumentation
UNIT I- BASIC MEASUREMENT CONCEPTS
PART A
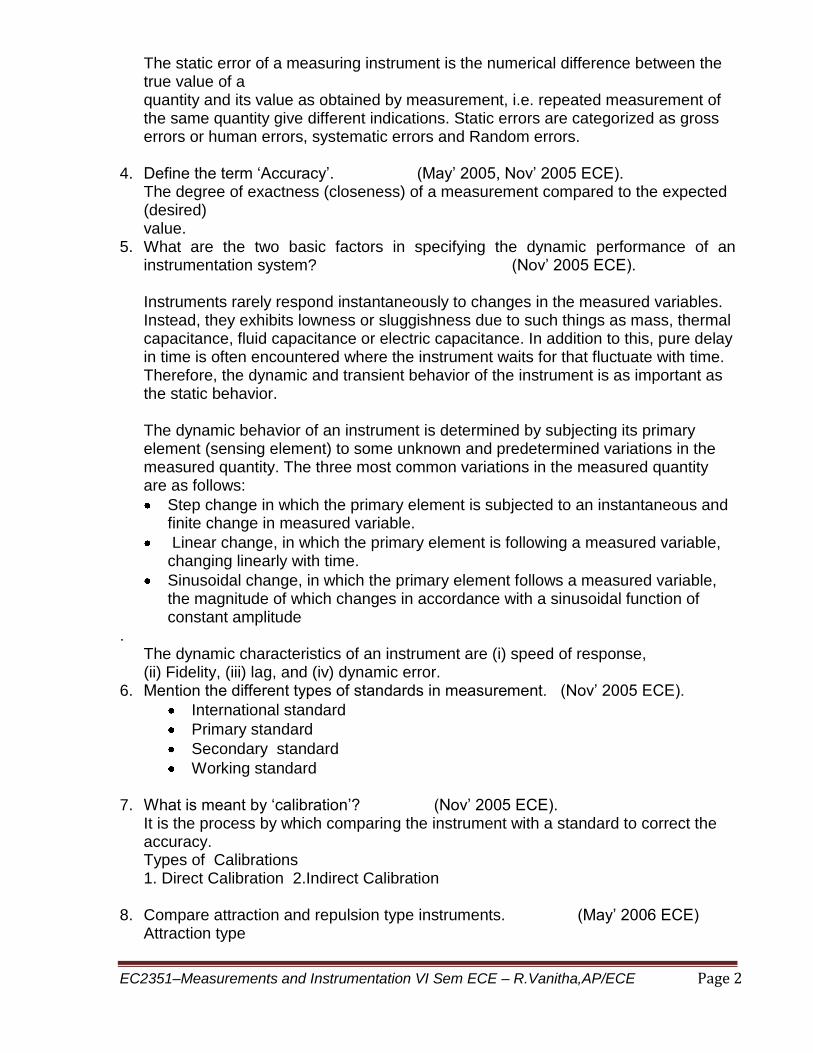
1. What are the basic elements of a generalized measurement system?
(Nov’ 2003 ECE).
2. Define the term ‘precision’. (Nov’ 2003 ECE). A measure of the consistency or repeatability of measurements, i.e. successive readings does not differ. (Precision is the consistency of the instrument output for a given value of input).
3. List any four static characteristics of a measuring system. (May’ 2004 ECE).
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 2
The static error of a measuring instrument is the numerical difference between the true value of a quantity and its value as obtained by measurement, i.e. repeated measurement of the same quantity give different indications. Static errors are categorized as gross errors or human errors, systematic errors and Random errors.
4. Define the term ‘Accuracy’. (May’ 2005, Nov’ 2005 ECE).
The degree of exactness (closeness) of a measurement compared to the expected (desired) value.
5. What are the two basic factors in specifying the dynamic performance of an instrumentation system? (Nov’ 2005 ECE). Instruments rarely respond instantaneously to changes in the measured variables. Instead, they exhibits lowness or sluggishness due to such things as mass, thermal capacitance, fluid capacitance or electric capacitance. In addition to this, pure delay in time is often encountered where the instrument waits for that fluctuate with time. Therefore, the dynamic and transient behavior of the instrument is as important as the static behavior. The dynamic behavior of an instrument is determined by subjecting its primary element (sensing element) to some unknown and predetermined variations in the measured quantity. The three most common variations in the measured quantity are as follows:
Step change in which the primary element is subjected to an instantaneous and finite change in measured variable.
Linear change, in which the primary element is following a measured variable, changing linearly with time.
Sinusoidal change, in which the primary element follows a measured variable, the magnitude of which changes in accordance with a sinusoidal function of constant amplitude
. The dynamic characteristics of an instrument are (i) speed of response, (ii) Fidelity, (iii) lag, and (iv) dynamic error.
6. Mention the different types of standards in measurement. (Nov’ 2005 ECE).
International standard
Primary standard
Secondary standard
Working standard
7. What is meant by ‘calibration’? (Nov’ 2005 ECE). It is the process by which comparing the instrument with a standard to correct the accuracy. Types of Calibrations 1. Direct Calibration 2.Indirect Calibration
8. Compare attraction and repulsion type instruments. (May’ 2006 ECE) Attraction type
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 3
The moving is flat disc which eccentrically mounted. When the current to be measured flows through the coil magnetic fields is produced with attracts the moving iron towards it, thus making the pointer to mover. Controlling torque is provided by springs. Repulsion type Moving iron repulsion type instruments consist of two vanes inside the coil. Among the two vanes one is fixed and the other is movable. When the current to be measured flows through the coil both the vanes get magnetized in a similar way and hence a force of repulsion a force repulsion exist between the two vanes which results in the movement of the moving vane and thus the movement of the pointer.
9. Differentiate Zero drift and span drift. (May’ 2006 ECE)
If the whole calibration gradually shifts due to slippage, permanent set or undue warming up of electronics tube circuits, zero drift sets.
10. Differentiate accuracy from precision.(Nov 2009/May 2010)
Accuracy Precision
Accuracy refers to degree of closeness of the measured value to the true value
Precision refers to degree of agreement among of readings
Accuracy gives the maximum error that is maximum departure of the final result from its true value
Precision of a measuring system gives its capability to reproduces a certain reading with a given accuracy
11. In a wheatstone bridge a change of 6Ω in the unknown arm of the bridge is required to produce a change in deflection of 2.4 mm of the galvanometer. Determine sensitivity and deflection factor. (Nov 2009)
12. Mention the significance of measurements. (APRIL/MAY 2011)
A standard is physical representation of a unit of measurement. A known accurate of physical quantity is terms as standard. These standard are used to determine the value of other physical quantities by the comparison method
13. Compare Moving coil with Moving iron instruments. (APRIL/MAY 2011)
Moving coil instruments Moving iron instruments
Uniform sale Non uniform scale
It can be used for both ac measurements
It can be used for both ac and dc measurements
Cost is high Cost is less
It is free from hysteresis error Serious error occur due to hysteresis
14. A 0-150v voltmeter has guaranteed accuracy of 1% full scale reading. The
voltage measured by this instrument is 83v. calculate the limiting error in percent(NOV/DEC 2011)
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 4
15. What is the difference between a primary and secondary standard (NOV/DEC 2011)
Primary standard Secondary standard
The main function of primary standard is the calibration and verification of secondary standard
Secondary standard are basic reference standard used by measurement and calibration of working standard
Primary standard are maintained at the national standard lab is different countries
Secondary standard are maintained at the industries. Each industry has its own secondary standard
16. What Are The Various Static Characteristic Of An Instrument ?
The Various Static Characteristics Of A Measuring System Are Accuracy, Precision, Error, Resolution, Sensitivity, Linearity, Zero ,Drift Etc.
17. Define Accuracy And Precision . Accuracy : It Is The Degree Of Closeness With Which The Instrument Reading Approaches The True Value Of The Quantity To Be Measured. Precision : It Is The Measure Of Consistency Or Repeatability Of Measurements. It Denotes The Closeness With Which Individual Measurements Are Departed Or Distributed About The Average Of Number Of Measured Value.
18. What meant by accuracy of an instrument?
The degree of exactness (closeness) of a measurement compared to the expected
(desired) value.
19. What is calibration?
It is the process by which comparing the instrument with a standard to correct the
accuracy. Types of Calibrations
Direct Calibration
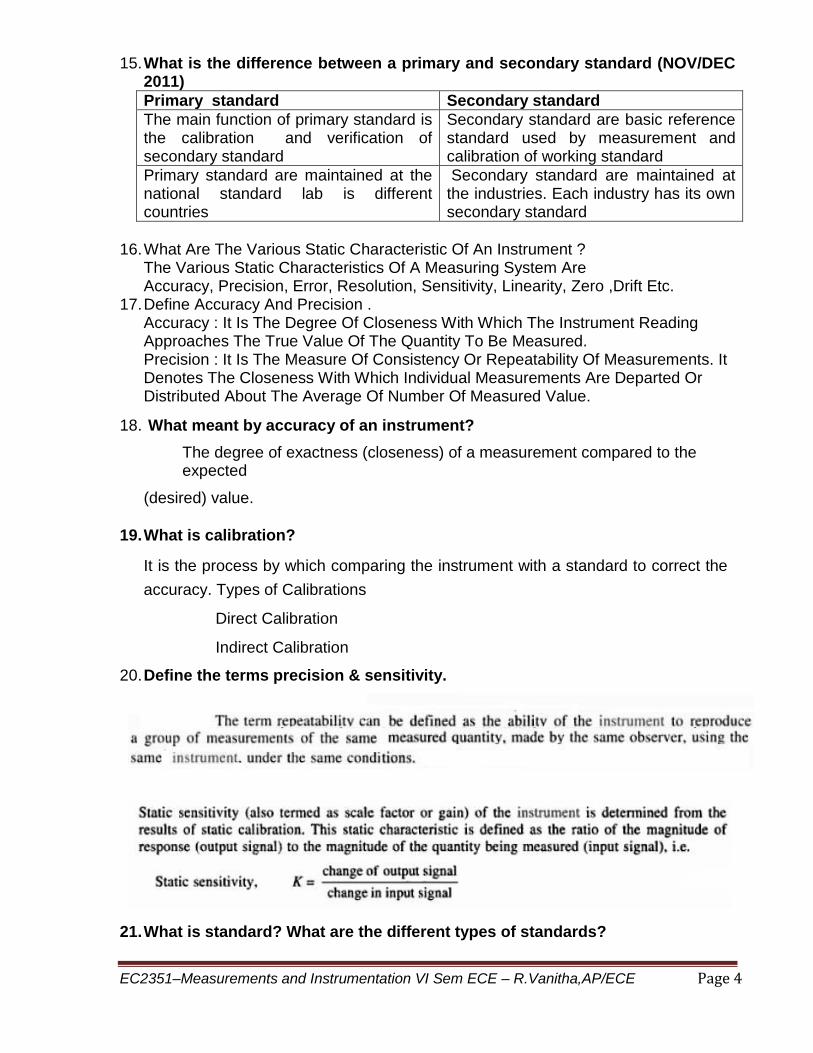
Indirect Calibration 20. Define the terms precision & sensitivity.
21. What is standard? What are the different types of standards?
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 5
A standard is a physical representation of a unit of measurement. The term “standard” is applied to ac piece of equipment having a known measure of physical quantity. Types of Standards
International Standards (defined based on international agreement ) Primary Standards (maintained by national standards laboratories) Secondary Standards ( used by industrial measurement laboratories) Working Standards ( used in general laboratory)
22. What are the basic elements of a generalized measurement system? (Nov’ 2003 ECE).
The basic elements of a generalized measurement system are (i) Primary sensing unit
(ii) Data conditioning unit (iii) Display unit.
23. Define the term ‘precision’. (Nov’ 2003 ECE).
A measure of the reproducibility of measurement i.e. given a fixed value of Variable,
precision is a measure of the degree to which successive measurement differ from one another.
24. What are the classifications of errors in measurements? (Nov’ 2004 ECE).
The classifications of errors are
(i) Gross errors
(ii) Systematic errors
(iii) Schematic errors
(iv) Random errors
25. List any four static characteristics of a measuring system. (May’ 2004 ECE).
Some of the static characteristics of a measuring system are
(i) Accuracy,
(ii) Sensitivity
(iii) Drift
(iv) Hysteresis
(v) Dead zone
(vi) Linearity
26. Define the term ‘Accuracy’. (May’ 2005, Nov’ 2005 ECE).
Accuracy refers to the degree of closeness or conformity to the true value of the quantity
under measurement
27. What are the two basic factors in specifying the dynamic performance of an
instrumentation system? (Nov’ 2005 ECE).
The two basic factors in specifying the dynamic performance of an instrumentation
system are
(i) Transient response.
(ii) Steady state response
28. Mention the different types of standards in measurement. (Nov’ 2005 ECE).
The different types of standards in measurement are
(i) International standards
(ii) Primary standards
(iii) Secondary standards
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 6
(iv) Working standards.
29. What is meant by ‘calibration’? (Nov’ 2005 ECE).
Calibration is the process of making an adjustment or making a scale so that the
readings of an instrument agree with the accepted and the certified standard.
30. Write the two conditions to be satisfied to make an ac bridge balance. (May’
2004/Nov’2006 ECE).
The galvanometer current is zero I1=I3=E/ (R1+R3)
I2=I4=E/ (R2+R4)
R1R4=R2R3
31. How can time and frequency standards to be disseminated? (May’ 2006 ECE)
Time and frequency can be disseminated via radio or television transmission. It
is also disseminated by low frequency navigation system called LORON-C.
32. Compare attraction and repulsion type instruments. (May’ 2006 ECE)
Attraction Type Instrument:
The coil is flat and has arrow slot like opening. The moving iron is a flat disc or a
sector, eccentrically mounted. When the current flows through the coil, the magnetic field is
produced and a moving iron moves from a weaker field to the stronger field inside it, or in other
words the moving iron is attracted in.
Repulsion Type:
There are two vanes inside the coil, one fixed and the other movable. These are
similarly magnetized when the current flows through the coil and there is a force of repulsion
between the two vanes resulting in movement of the moving vane.
33. An experiment performed once gave a reading that showed a deviation of 10%. If it
is repeated 65 times, what is the likely deviation? (May’ 2006 ECE)
Refer book
34. Differentiate Zero drift and span drift. (May’ 2006 ECE)
Zero drift is the deviation of the output from its zero value, when the variable to be
measured is constant.
Span drift or sensitivity drift is the change in the indication along the upward scale.
35. Precision is a necessary but not a sufficient condition for accuracy. True or False-
justify your answer. (Nov’ 2006 ECE)
True. Precision is a necessary but not a sufficient condition for accuracy. Because
Accuracy refers to the degree of closeness or conformity to the true value of the quantity under
measurement. Precision refers to the degree of agreement within a group of measurements or
instruments.
36. What are the different types of standards of measurement? (May 2007)
There are different types of standards of measurement, classified by their function and
application in the following categories:
i) International standards
ii) Primary standards
iii) Secondary standards
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 7
iv) Working standards
37. What is the need for measurement?(May 2007-R01)
Measurement enables a person to determine the value of an unknown quantity and is
mainly needed for determining the value or magnitude of a quantity or variable.
38. Write the need for calibration? (May 2007-R01)
Calibration is needed for finding the errors and accuracy of instruments.
39. Define standards. Classify them.(Nov 2007)
A standard of measurement is a physical representation of unit of measurement. A unit is
realized by reference to an arbitrary material standard or a natural phenomenon including
physical and atomic constants.
i) International standards
ii) Primary standards
iii) Secondary standards
iv) Working standards
40. Bring out the difference between moving coil and moving iron instruments.(Nov
2007)
Moving iron instruments are generally used for measuring AC voltage and currents
Moving coil instruments are used for measuring DC quantities.
41. Define static error and how are they classified.(May 2008)
Systematic errors can also be sub divided into static or dynamic errors. Static errors are
caused by limitations of the measuring device or the physical laws governing its behavior. The
static error is introduced in a micrometer when excessive pressure is applied in torquing the
shaft.
42. What is the difference between analog and digital instruments.(May 2008)
The major differences between analog and digital instruments are analog instruments
are those which are based on some mechanical instruments like gears etc and digital instruments
are those based on ICs etc. For eg. Analog get input and show output mechanically and digital
instruments shows digital output
43. What is measurement and how is it classified?(May 2009)
Measurement is essentially the act or the result of a quantitative comparison between a
given quantity and quantity of the same kind chosen as a standard or a unit.
44. Distinguish between active and passive transducers. (May 2009)
Active transducers are those which require electric current (a source of energy) for
working, while passive transducers are those which does not need an external source. Passive
transducers directly produce electric signals without an external energy source.
45. Differentiate accuracy from precision.(Nov 2009/May 2010)
Accuracy indicates how far the measured value is close to the true value while precision
indicates how far a particular measured value is from the average of the number of reading
taken. Thus precision is not related to true value of the parameter to be measured .
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 8
46. In a wheatstone bridge a change of 6Ω in the unknown arm of the bridge is
required to produce a change in deflection of 2.4 mm of the galvanometer. Determine
sensitivity and deflection factor. (Nov 2009)
Refer book
47. What is meant by measurement?
Measurement is an act or the result of comparison between the quantity and a predefined
standard.
48. Mention the basic requirements of measurement.
The standard used for comparison purpose must be accurately defined and should be
commonly accepted.
The apparatus used and the method adopted must be provable.
49. What are the 2 methods for measurement?
Direct method and
Indirect method.
30. Explain the function of measurement system.
The measurement system consists of a transducing element which converts the quantity
to be measured in an analogous form. the analogous signal is then processed by some
intermediate means and is then fed to the end device which presents the results of the
measurement.
50. Define Instrument.
Instrument is defined as a device for determining the value or magnitude of a quantity or
variable.
51. List the types of instruments.
The 3 types of instruments are
Mechanical Instruments
Electrical Instruments and
Electronic Instruments
55. Classify instruments based on their functions.
Indicating instruments
Integrating instruments
Recording instruments
56. Give the applications of measurement systems.
The instruments and measurement systems are used for
Monitoring of processes and operations.
Control of processes and operations.
Experimental engineering analysis.
57. Why calibration of instrument is important?
The calibration of all instruments is important since it affords the opportunity to check
the instrument against a known standard and subsequently to errors in accuracy.
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 9
58. Explain the calibration procedure.
Calibration procedure involves a comparison of the particular instrument with either.
A primary standard
A secondary standard with a higher accuracy than the instrument to be calibrated or an
instrument of known accuracy.
59.Define Calibration.
It is the process by which comparing the instrument with a standard to correct the
accuracy.
60. Name the different essential torques in indicating instruments.
Deflecting torque
Controlling torque
Damping torque
61.Name the types of instruments used for making voltmeter and ammeter.
PMMC type
Moving iron type
Dynamometer type
Hot wire type
Electrostatic type
Induction type.
62.State the advantages of PMMC instruments
Uniform scale.
No hysteresis loss
Very accurate
High efficiency.
63.State the disadvantages of PMMC instruments
Cannot be used for ac measurements
Some errors are caused by temperature variations.
64. State the applications of PMMC instruments
measurement of dc voltage and current
used in dc galvanometer.
65. How the range of instrument can be extended in PMMC instruments.
In ammeter by connecting a shunt resister
In voltmeter by connecting a series resister.
66. State the advantages of Dynamometer type instruments
Can be used for both dc and ac measurements.
Free from hysteresis and eddy current errors.
67. State the advantages of Moving iron type instruments
Less expensive
Can be used for both dc and ac
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 10
Reasonably accurate.
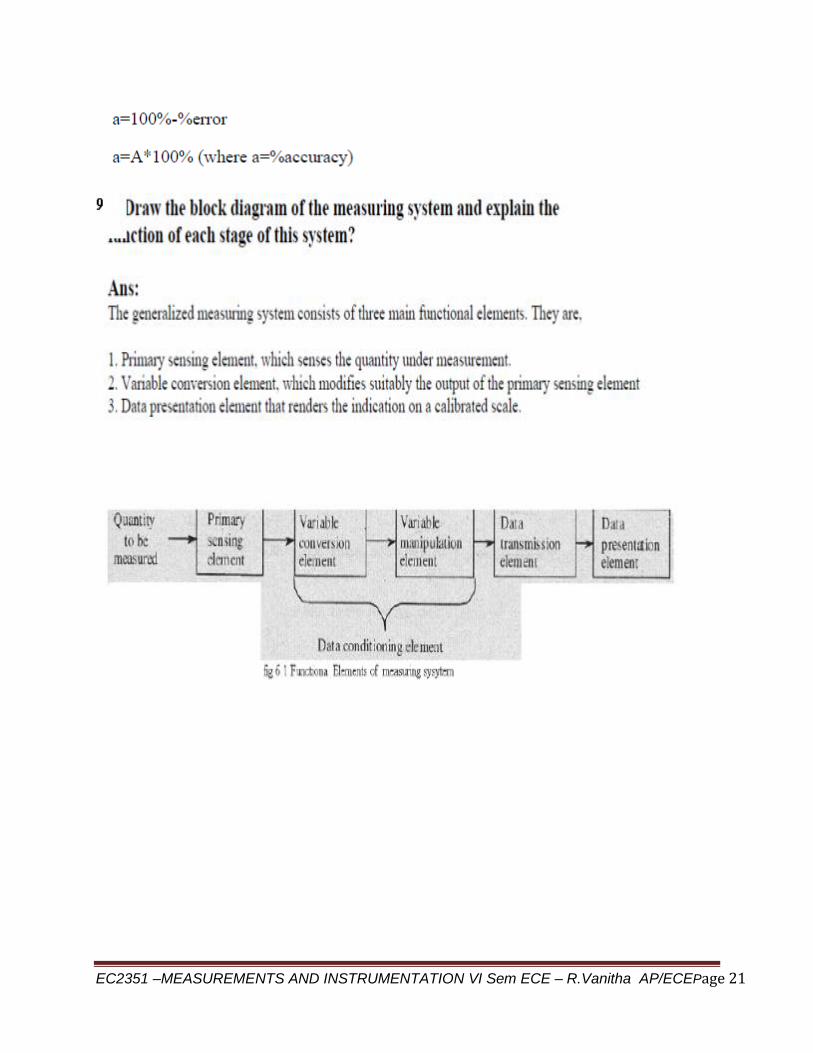
68.What are the basic elements of a generalized measurement system?
The basic elements of a measurement system are primary sensing element, variable
conversion element, variable manipulation element, data transmission element and data
presentation element.
69. Define the term precision.
Precision is the measure of the consistency or repeatability of a series of measurements.
Precision=1-|Xi-X/Xi| Xi=the value of the ith measurements.
X=the average value of n measurements
70.What is the difference between accuracy and precision?
Accuracy : It is the closeness with which an instrument reading approaches the true
value of the variable being measured.
Precision: It is the measure of reproducibility of the measurements.
71. Define resolution of an instrument.
Resolution of an instrument is the smallest change in the measured quantity that will
produce a detectable change in the instrument reading.
72. Define span.
Span is defined as the algebraic difference the highest and lowest scale values of an
instrument.
73.What is random error?
Random error is an error due to unknown causes and observed when the magnitude and
polarity of a measurement fluctuates in a unpredictable manner.
74. Define standard deviation.
Standard deviation or root mean square deviation is a statistical measure for analyzing
grouped data by quantifying the dispersion of individual data points about their
mean value.
75. Define primary standards.
They are basic fundamental or derived unit standard maintained by a country’s national
standards laboratory. They are absolute standards of high accuracy that can be used as ultimate
reference standards.
76. Define sensitivity of an instrument.
Sensitivity of an instrument is a measure of the change in reading of an instrument for a
given change in the measured quantity.
77. Define resolution of an instrument.
Resolution of an instrument is the smallest change in the measured quantity that will
produce a detectable change in the instrument reading.
78.What is meant by systematic error?
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 11
Systematic errors are those errors that remain constant with repeated measurements,
such as zero, scale, response time and loading errors.
79. Define limiting error.
In most instruments, the accuracy is guaranteed to be within a certain percentage of full
scale reading. Manufacturers have to specify the deviations from the nominal value of a
particular quantity. The limits of these deviations from the specified value are defined as
limiting errors or guarantee errors.
Limiting error = accuracy x full-scale value.
80. Define probable error.
The probable error is defined as probable error r = ± 0.6745 σ
where σ is the standard deviation. Probable error is a measure of precision.
81. Distinguish reproducibility and repeatability.
Reproducibility is the degree of closeness with which a given value
may be repeatedly measured. It may be specified in turns of units for a given period
of time.
82.Distinguish between direct and indirect methods of measurements.
Direct method:-
In this method the unknown quantity is directly compared against a standard.
Less sensitive
Indirect method:
The parameter to be measured is compared with standard through the
use of a calibrated system.
More sensitive 83.Define resolution.
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 12
84.What is threshold?
85. Define zero drift.
If the whole calibration gradually shifts due to slippage, permanent set or undue
Warming up of electronics tube circuits, zero drift sets.
PART – B
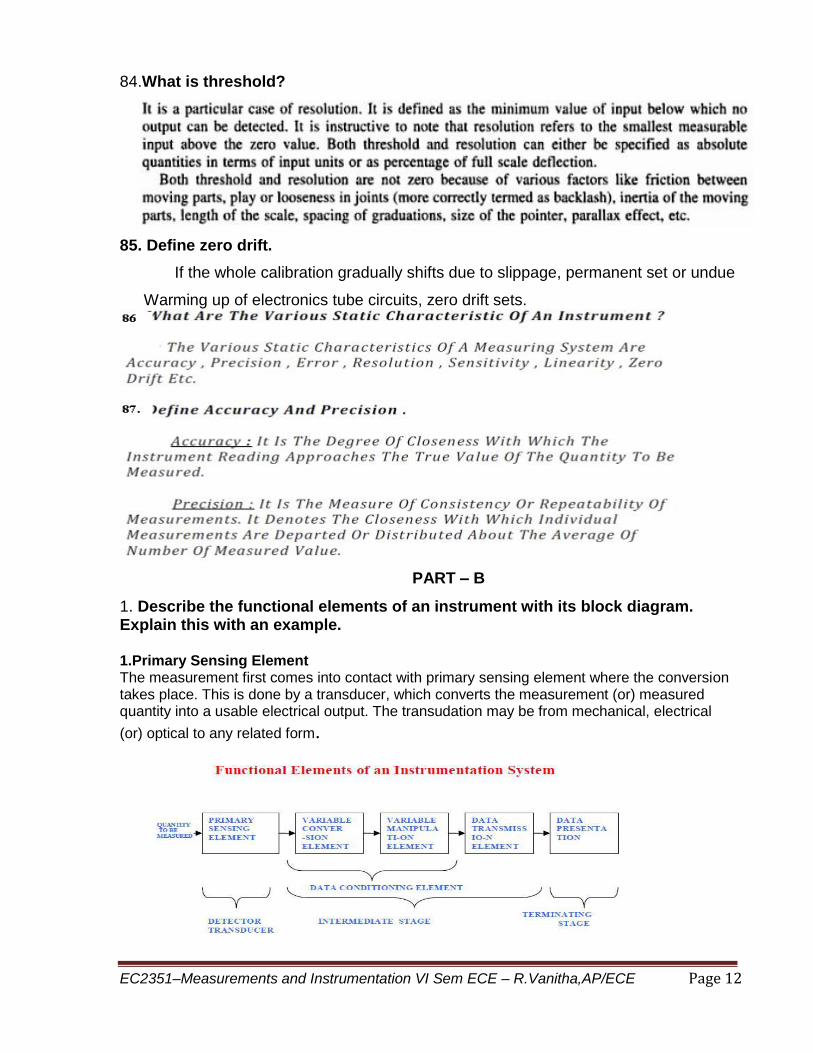
1. Describe the functional elements of an instrument with its block diagram. Explain this with an example. 1.Primary Sensing Element The measurement first comes into contact with primary sensing element where the conversion takes place. This is done by a transducer, which converts the measurement (or) measured quantity into a usable electrical output. The transudation may be from mechanical, electrical
(or) optical to any related form.
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 13
2. Discuss in detail various types of errors associated in measurement and how these errors can be minimized? What are the different types of errors in measurement? Explain. (8) (APRIL/MAY 2011) The static error of a measuring instrument is the numerical difference between the true value of a quantity and its value as obtained by measurement, i.e. repeated measurement of the same quantity give different indications. Static errors are categorized as gross errors or human errors, systematic errors and Random errors. Gross Errors
This error is mainly due to human mistakes in reading or in using instruments or errors in recording observations. Errors may also occur due to incorrect adjustments of
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 14
instruments and computational mistakes. These errors cannot be treated mathematically. The complete elimination of gross errors is not possible, but one can minimize them .Some errors are easily detected while others may be elusive. One of the basic gross errors that occur frequently is the improper use of an Instrument the error can be minimized by taking proper care in reading and recording the measurement parameter. In general, indicating instruments change ambient conditions to some extent when connected into a complete circuit.
Systematic Errors
These errors occur due to shortcomings of, the instrument, such as defective or worn
parts, or ageing or effects of the environment on the instrument. These errors are
sometimes referred to as bias, and they influence all measurements of a quantity
alike. A constant uniform deviation of the operation of an instrument is known as a
systematic error. There are basically three types of systematic errors (i) Instrumental, (ii) Environmental, and (iii) Observational
(i) Instrumental Errors
Instrumental errors are inherent in measuring instruments, because of their mechanical structure. For example, in the D'Arsonval movement friction in the bearings of various moving components, irregular spring tensions, stretching of the spring or reduction in tension due to improper handling or over loading of the instrument. Instrumental errors can be avoided by
(a) Selecting a suitable instrument for the particular measurement applications. (b)Applying correction factors after determining the amount of instrumental error. (c) Calibrating the instrument against a standard.
(ii) Environmental Errors
Environmental errors are due to conditions external to the measuring device, including conditions in the area surrounding the instrument, such as the effects of change in temperature, humidity, barometric pressure or of magnetic or electrostatic fields. These errors can also be avoided by (i) air conditioning, (ii) hermetically sealing certain components in the instruments, and (iii) using magnetic shields.
(iii) Observational Errors
Observational errors are errors introduced by the observer. The most common error is
the parallax error introduced in reading a meter scale, and the error of estimation when
obtaining a reading from a meter scale. These errors are caused by the habits of
individual observers. For example, an observer may always introduce an error by
consistently holding his head too far to the left while reading a needle and scale
reading. In general, systematic errors can also be subdivided into static and dynamic
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 15
Errors. Static errors are caused by limitations of the measuring device or the physical
laws governing its behavior. Dynamic errors are caused by the instrument not
responding fast enough to follow the changes in a measured variable.
3. Define the following terms in the context of normal frequency distribution of data.
a) Mean value b) Deviation c) Average deviation d) Variance e) Standard deviation. 4. Discuss in detail the various static and dynamic characteristics of a measuring
system. STATIC CHARACTERISTICS:-
The static characteristics of an instrument are, in general, considered for
instruments which are used to measure an unvarying process condition. All the static
performance characteristics are obtained by one form or another of a process called
calibration. There are a number of related definitions (or characteristics), which are
described below, such as accuracy% precision, repeatability, resolution, errors,
sensitivity, etc.
l. Instrument: A device or mechanism used to determine the present value of the quantity
under measurement.
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 16
2. Measurement: The process of determining the amount, degree, or capacity by
comparison (direct or indirect) with the accepted standards of the system units
being used. 3. Accuracy: The degree of exactness (closeness) of a measurement compared to the
expected (desired) value. 4. Resolution: The smallest change in a measured variable to which an instrument will
respond. 5. Precision: A measure of the consistency or repeatability of measurements, i.e.
successive readings does not differ. (Precision is the consistency of the
instrument output for a given
value of input). 6. Expected value: The design value, i.e. the most probable value that calculations
indicate one should expect to measure. 7. Error: The deviation of the true value from the desired value. 8. Sensitivity: The ratio of the change in output (response) of the instrument to a change
of input or measured variable.
DYNAMIC CHARACTERISTICS:-
Instruments rarely respond instantaneously to changes in the measured variables.
Instead, they exhibit slowness or sluggishness due to such things as mass, thermal
capacitance, fluid capacitance or electric capacitance. In addition to this, pure delay in
time is often encountered where the instrument waits for some reaction to take place.
Such industrial instruments are nearly always used for measuring quantities that fluctuate
with time. Therefore, the dynamic and transient behavior of the instrument is as important
as the static behavior.
The dynamic behavior of an instrument is determined by subjecting its primary
element (sensing element) to some unknown and predetermined variations in the
measured quantity. The three most common variations in the measured quantity are as
follows:
Step change in which the primary element is subjected to an instantaneous and finite
change in measured variable.
Linear change, in which the primary element is following a measured variable, changing
linearly with time.
Sinusoidal change, in which the primary element follows a measured variable, the
magnitude of which changes in accordance with a sinusoidal function of constant
EC2351–Measurements and Instrumentation VI Sem ECE – R.Vanitha,AP/ECE Page 17
amplitude. The dynamic characteristics of an instrument are
Speed of Response: It is the rapidity with which an instrument responds to changes in
the measured quantity.
Fidelity: It is the degree to which an instrument indicates the changes in the measured
variable without dynamic error (faithful reproduction).
Lag: It is the retardation or delay in the response of an instrument to changes in the
measured variable.
Dynamic Error: It is the difference between the true values of a quantity changing with
time and the value indicated by the instrument, if no static error is assumed. When measurement problems are concerned with rapidly varying quantities, the
dynamic relations between the instruments input and output are generally Defined by
the use of differential equations.
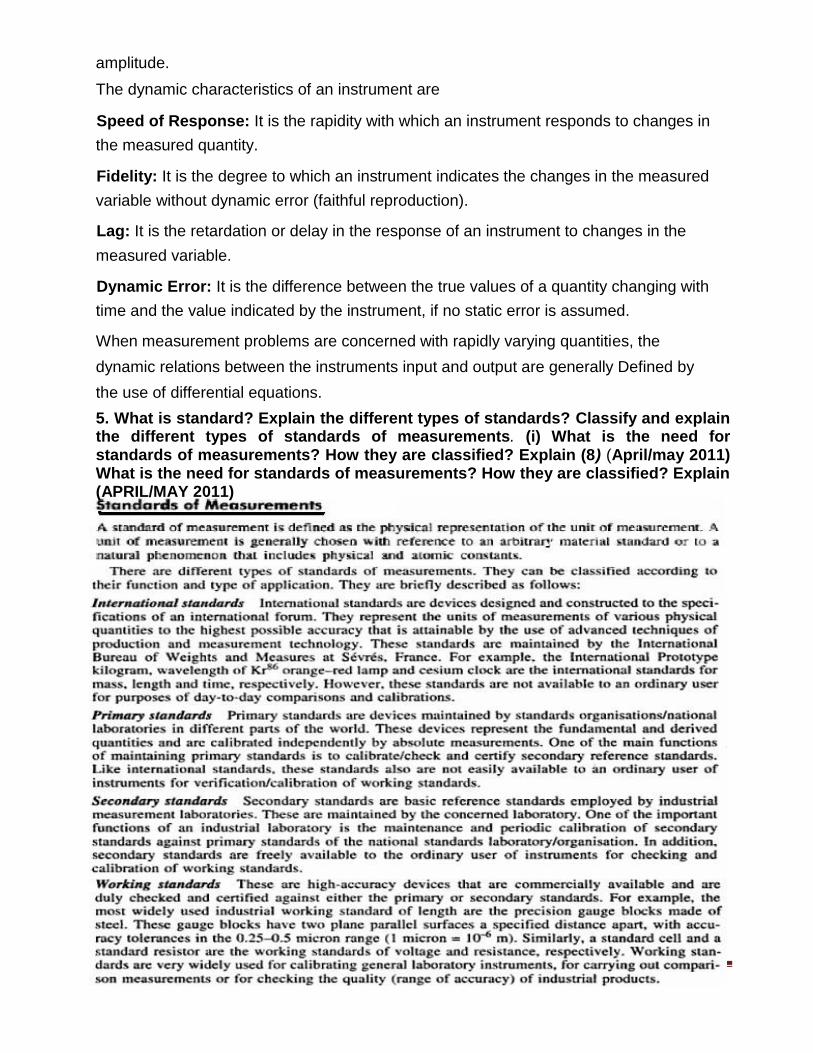
5. What is standard? Explain the different types of standards? Classify and explain the different types of standards of measurements. (i) What is the need for standards of measurements? How they are classified? Explain (8) (April/may 2011) What is the need for standards of measurements? How they are classified? Explain (APRIL/MAY 2011)
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 18
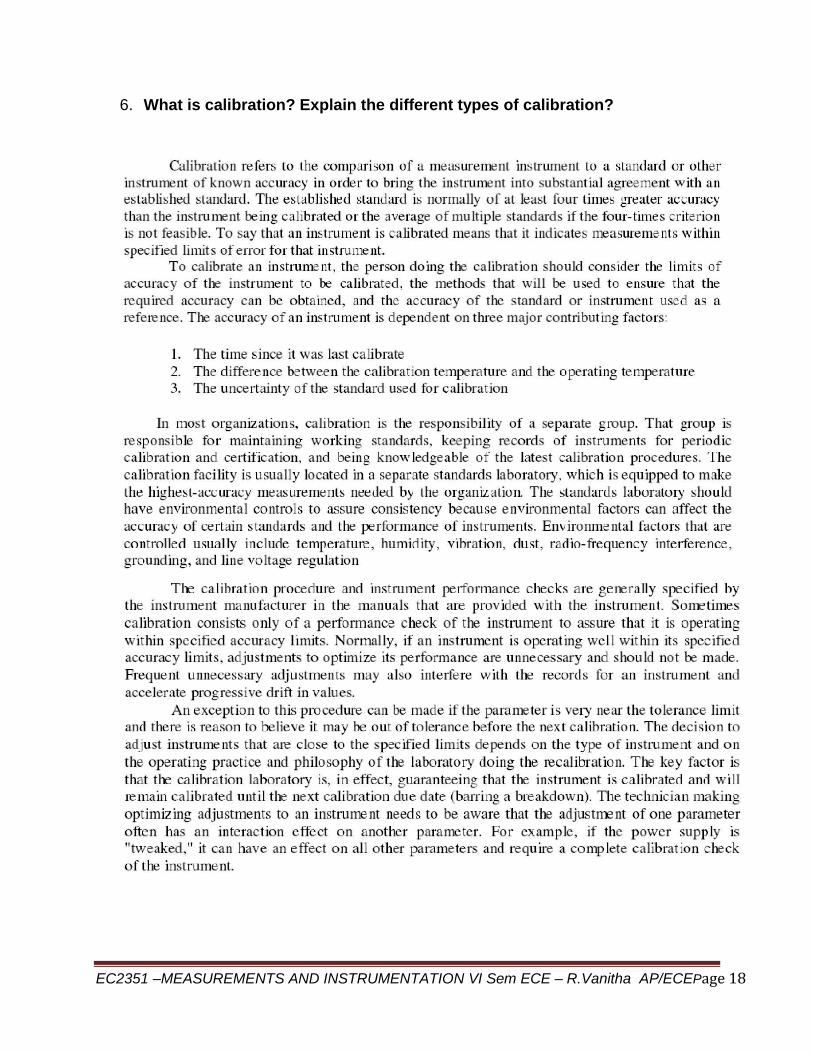
6. What is calibration? Explain the different types of calibration?
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 19
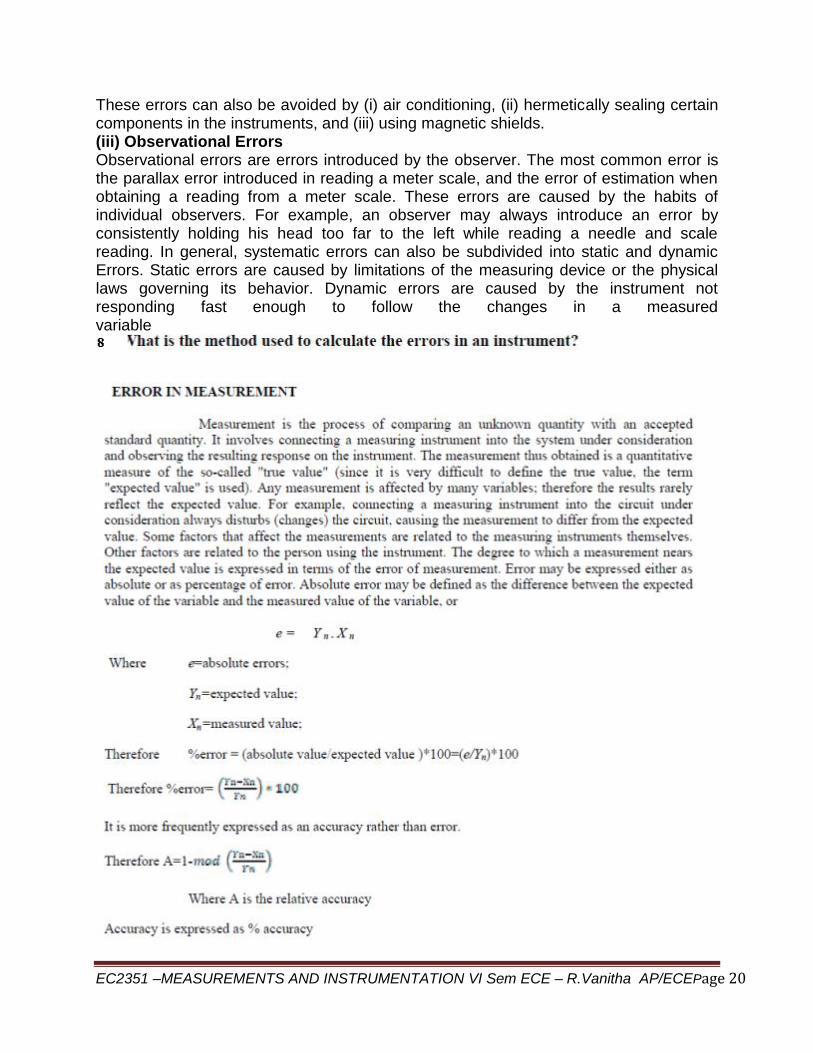
7. What are the different types of static errors in a system? Explain the different types of error used in measurement(10) (NOV/DEC 2011) What are the different types of errors in measurement? Explain. (8) (ii) How do you measure the unknown inductance using Hay Bridge? (8) (APRIL/MAY 2011) Explain the different types of error used in measurement(10) (NOV/DEC 2011)
The static error of a measuring instrument is the numerical difference between the true value of a quantity and its value as obtained by measurement, i.e. repeated measurement of the same quantity give different indications. Static errors are categorized as gross errors or human errors, systematic errors and Random errors. 1. Gross Errors This error is mainly due to human mistakes in reading or in using instruments or errors in recording observations. Errors may also occur due to incorrect adjustments of instruments and computational mistakes. These errors cannot be treated mathematically. The complete elimination of gross errors is not possible, but one can minimize them .Some errors are easily detected while others may be elusive. One of the basic gross errors that occur frequently is the improper use of an Instrument the error can be minimized by taking proper care in reading and recording the measurement parameter. In general, indicating instruments change ambient conditions to some extent when connected into a complete circuit. 2. Systematic Errors These errors occur due to shortcomings of, the instrument, such as defective or worn parts, or ageing oreffects of the environment on the instrument. These errors are sometimes referred to as bias, and they influence all measurements of a quantity alike. A constant uniform deviation of the operation of an instrument is known as a systematic error. There are basically three types of systematic errors (i) Instrumental, (ii) Environmental, and (iii) Observational (i) Instrumental Errors Instrumental errors are inherent in measuring instruments, because of their mechanical structure. For example, in the D'Arsonval movement friction in the bearings of various moving components, irregular spring tensions, stretching of the spring or reduction in tension due to improper handling or over loading of the instrument. Instrumental errors can be avoided by (a) Selecting a suitable instrument for the particular measurement applications. (b) Applying correction factors after determining the amount of instrumental error. (c) Calibrating the instrument against a standard. (ii) Environmental Errors Environmental errors are due to conditions external to the measuring device, including conditions in the area surrounding the instrument, such as the effects of change in temperature, humidity, barometric pressure or of magnetic or electrostatic fields.
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 20
These errors can also be avoided by (i) air conditioning, (ii) hermetically sealing certain components in the instruments, and (iii) using magnetic shields. (iii) Observational Errors Observational errors are errors introduced by the observer. The most common error is the parallax error introduced in reading a meter scale, and the error of estimation when obtaining a reading from a meter scale. These errors are caused by the habits of individual observers. For example, an observer may always introduce an error by consistently holding his head too far to the left while reading a needle and scale reading. In general, systematic errors can also be subdivided into static and dynamic Errors. Static errors are caused by limitations of the measuring device or the physical laws governing its behavior. Dynamic errors are caused by the instrument not responding fast enough to follow the changes in a measured variable
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 21
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 22

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 23
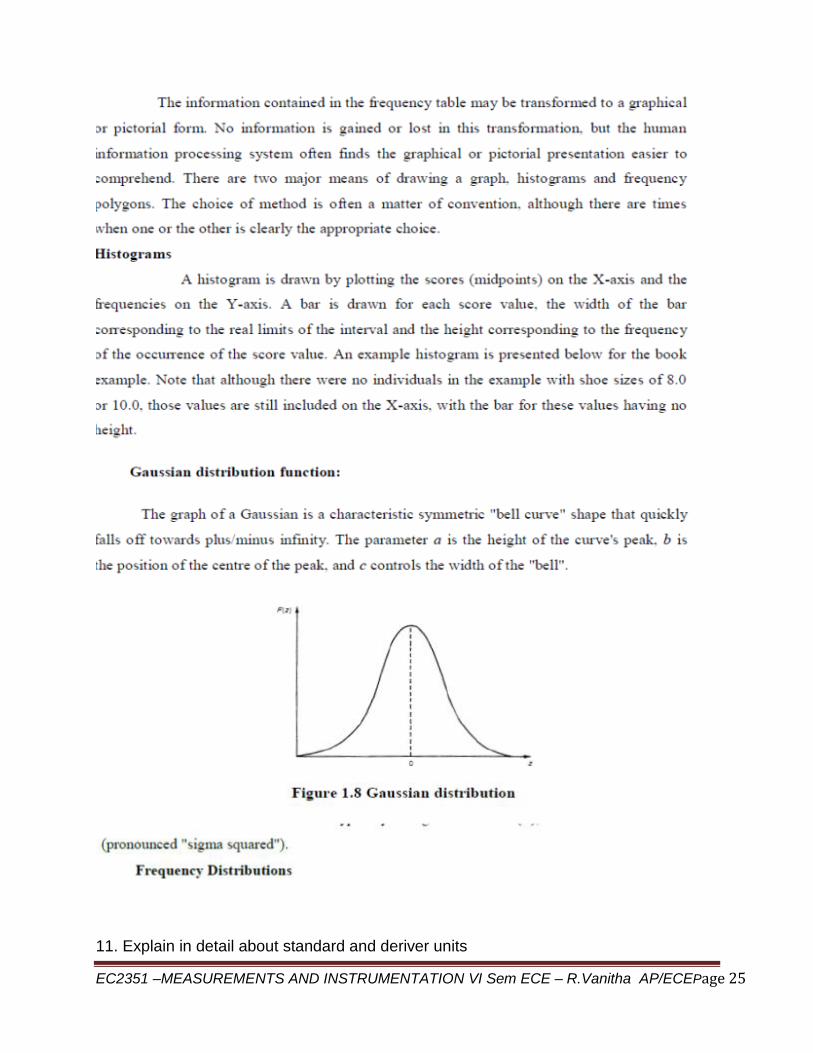
10. Explain in detail about statistical analysis

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 24
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 25
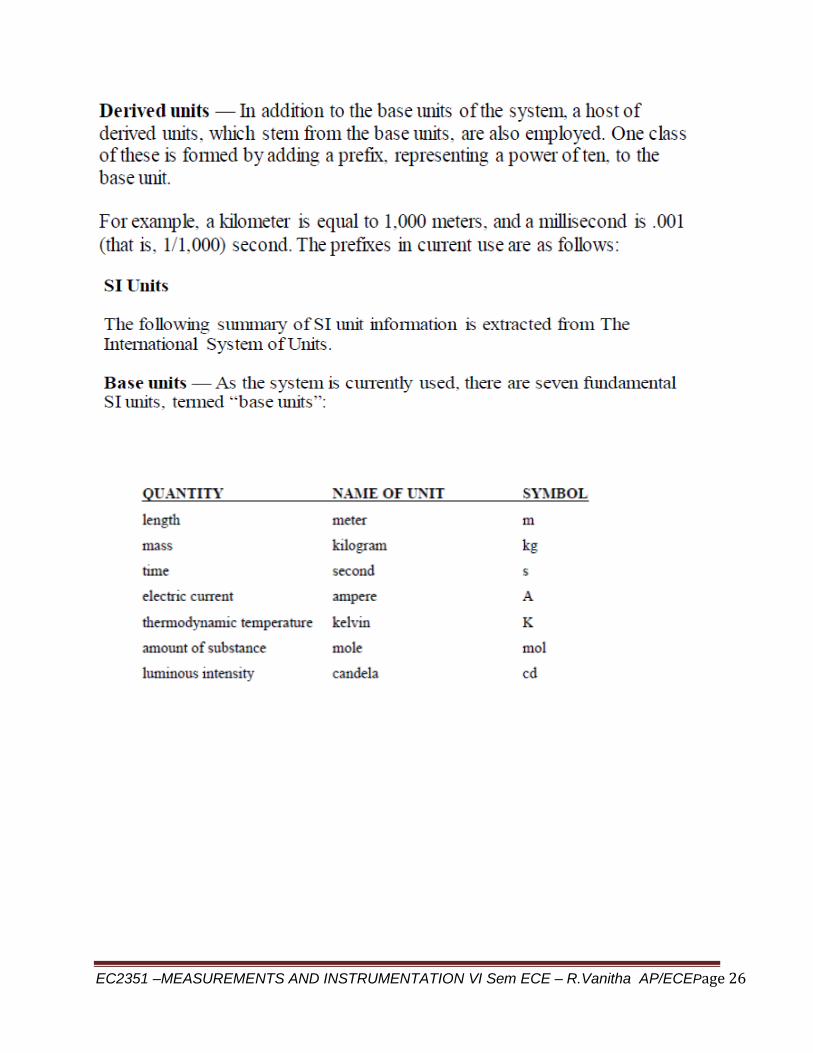
11. Explain in detail about standard and deriver units
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 26
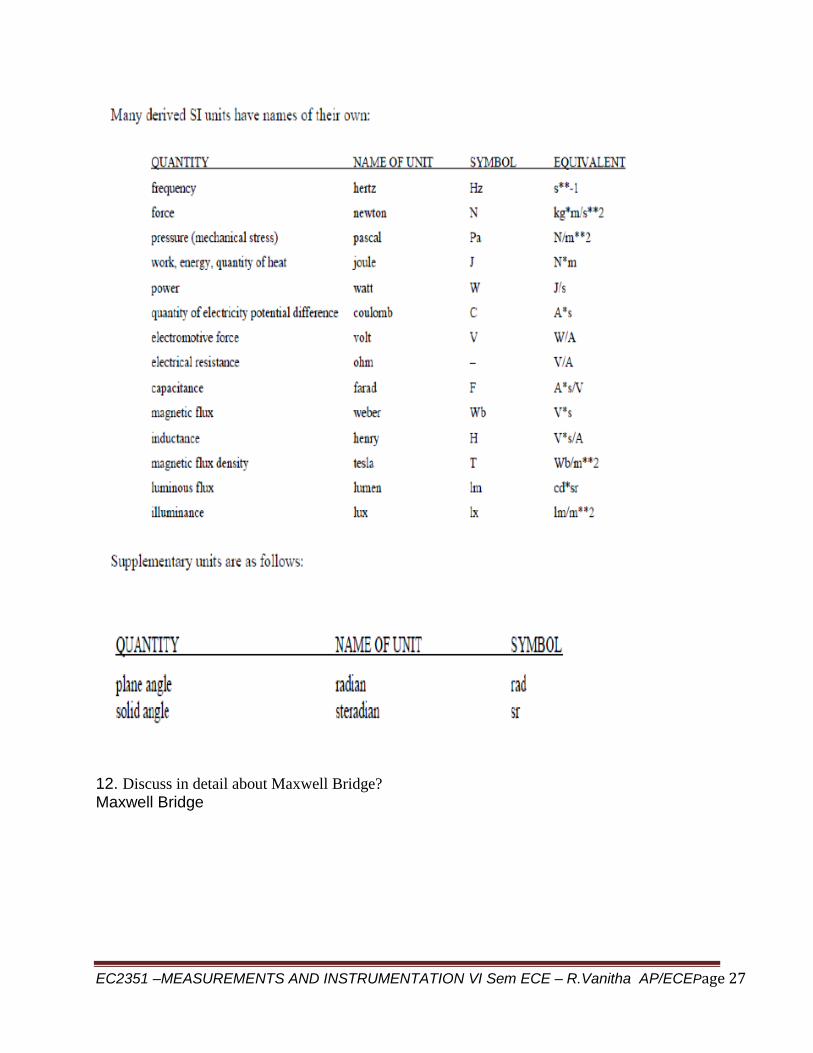
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 27
12. Discuss in detail about Maxwell Bridge? Maxwell Bridge

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 28
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 29
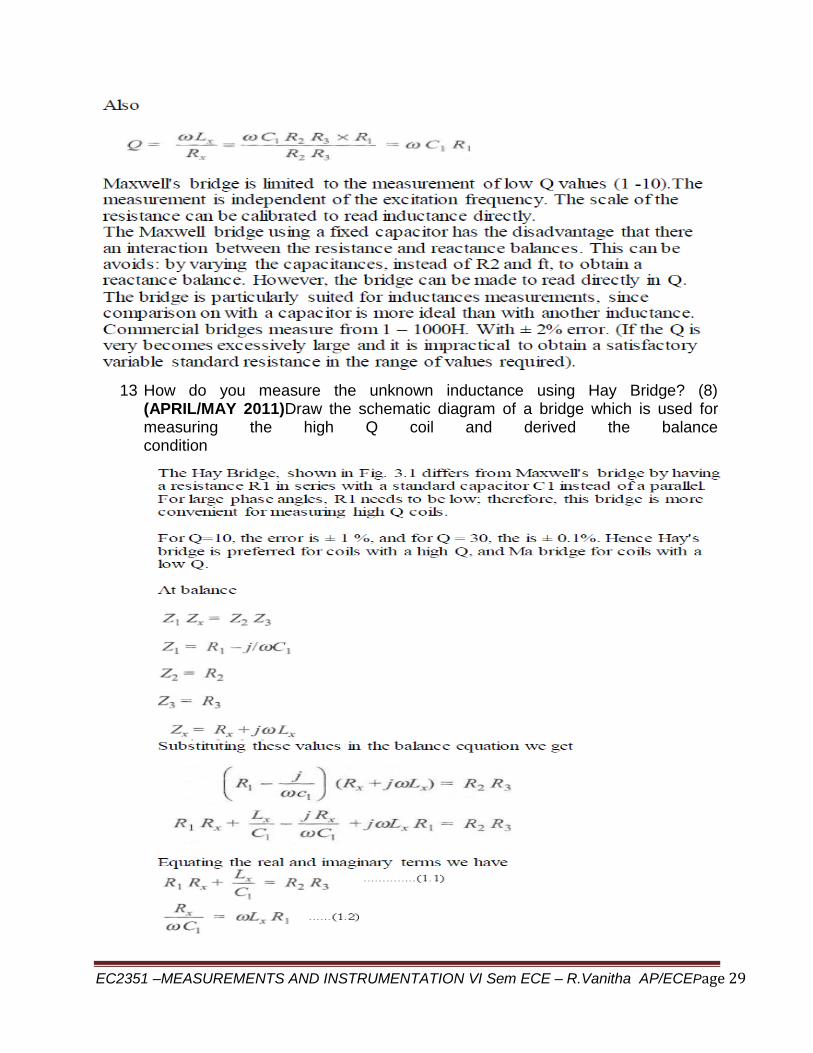
13 How do you measure the unknown inductance using Hay Bridge? (8)
(APRIL/MAY 2011)Draw the schematic diagram of a bridge which is used for measuring the high Q coil and derived the balance condition
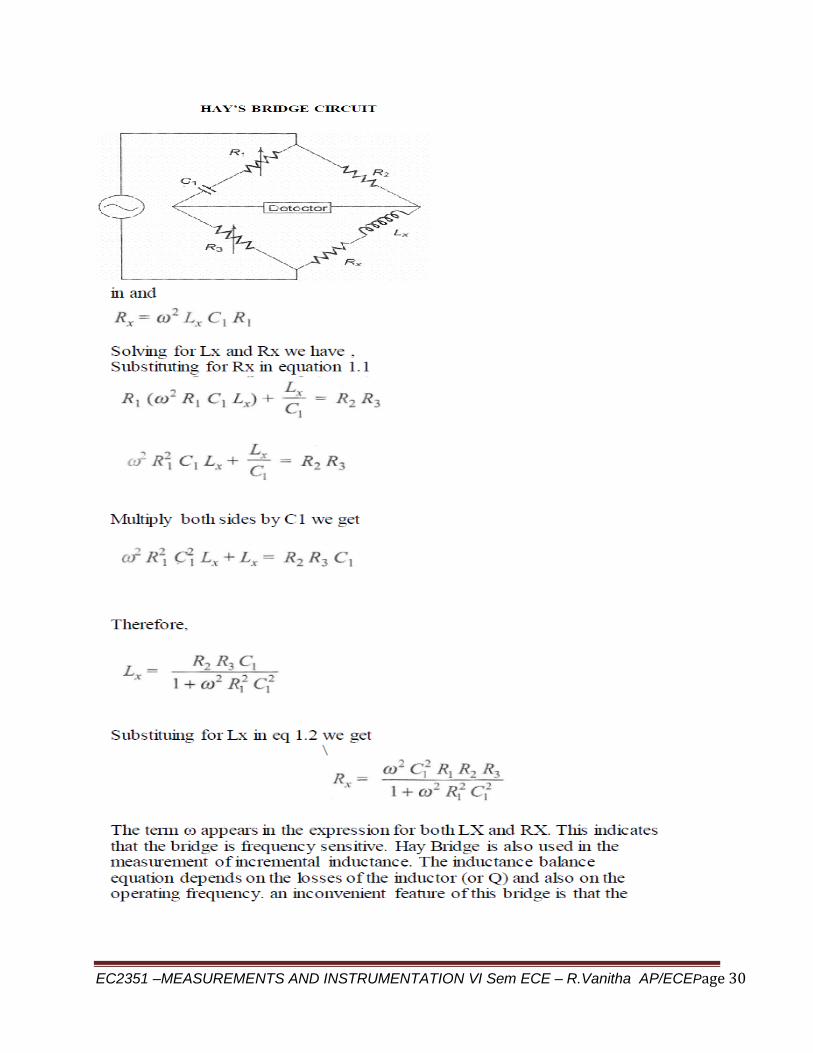
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 30
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 31
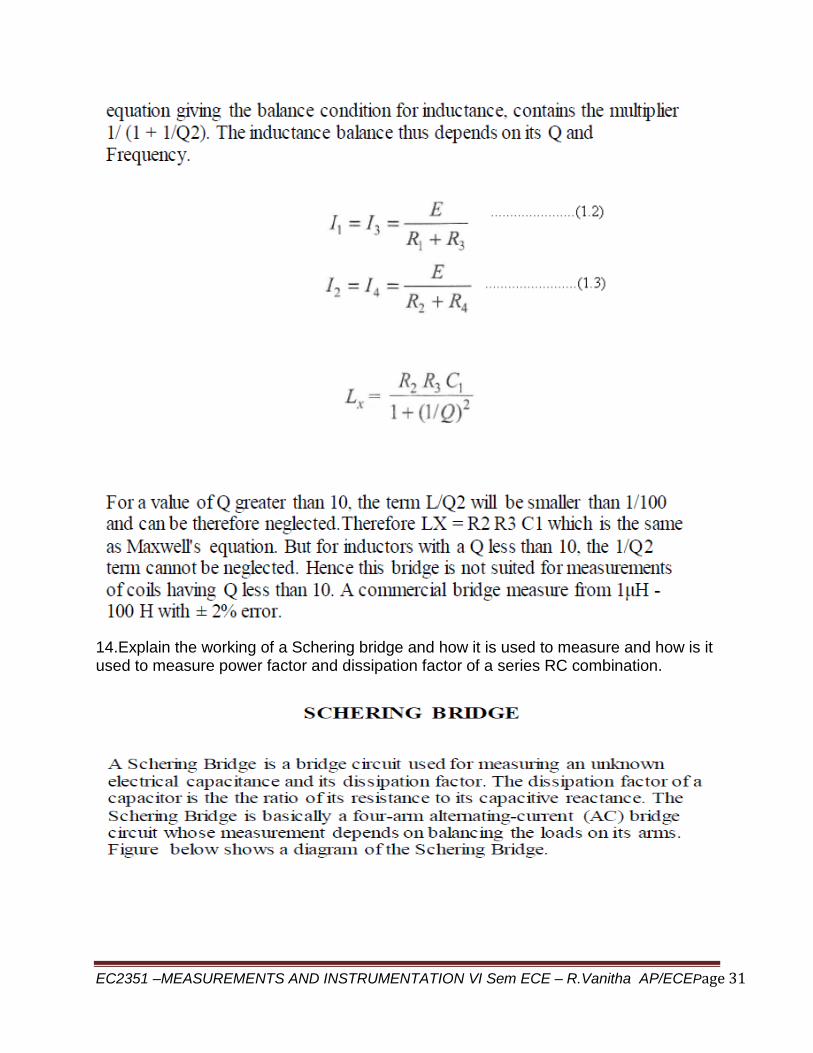
14.Explain the working of a Schering bridge and how it is used to measure and how is it used to measure power factor and dissipation factor of a series RC combination.
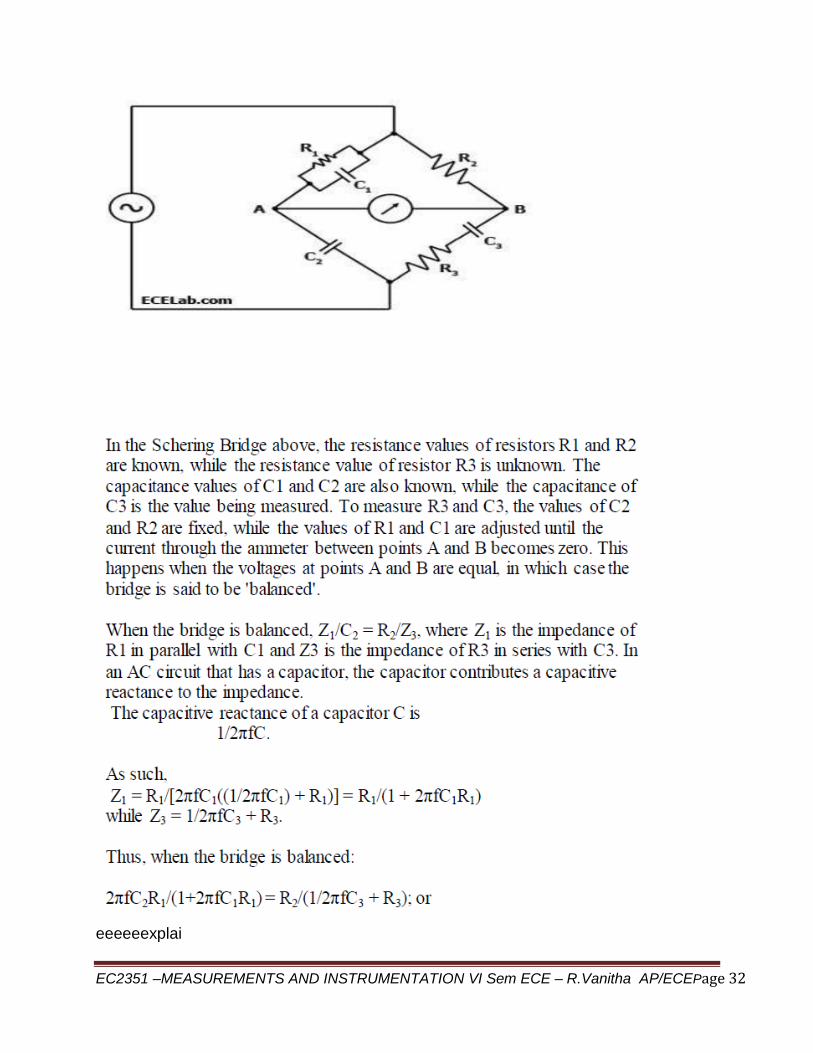
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 32
eeeeeexplai
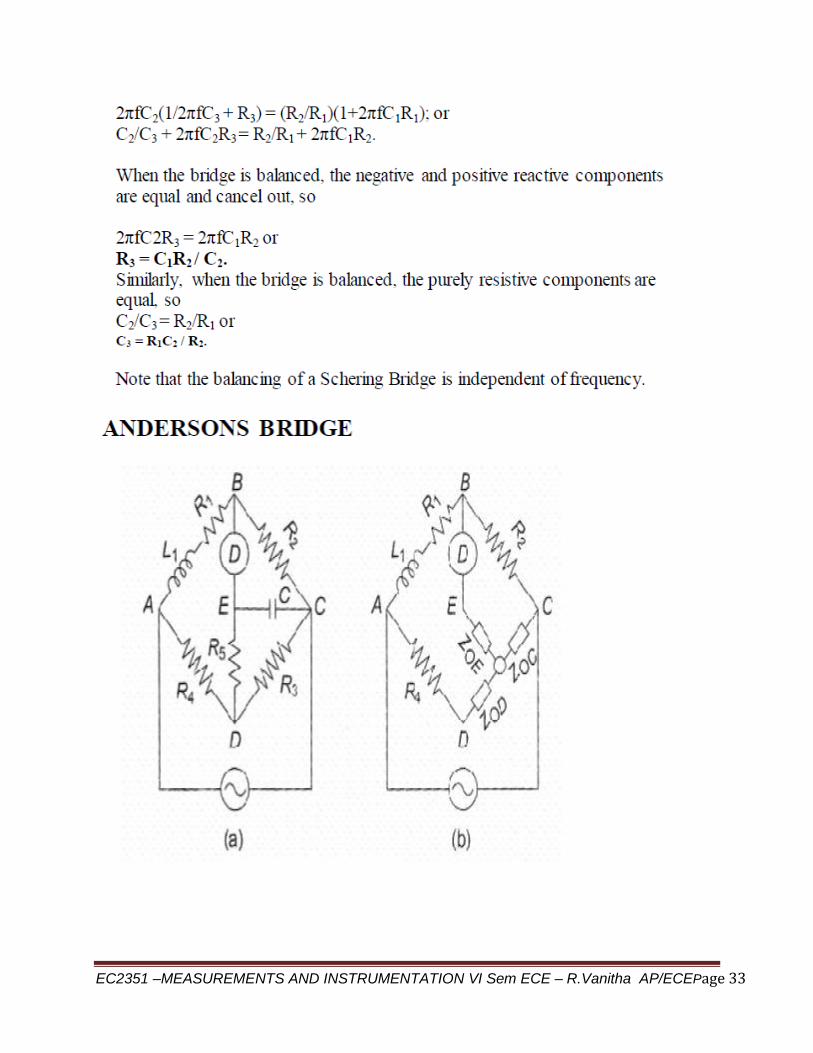
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 33

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 34
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 35
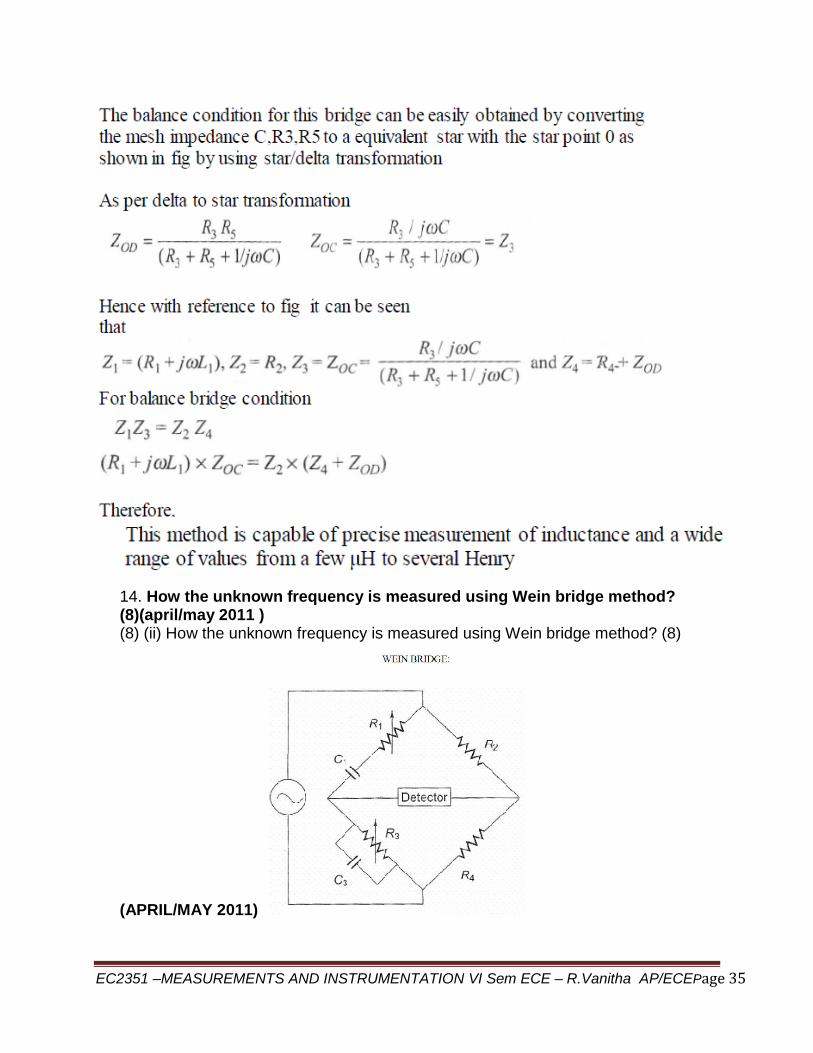
14. How the unknown frequency is measured using Wein bridge method? (8)(april/may 2011 ) (8) (ii) How the unknown frequency is measured using Wein bridge method? (8)
(APRIL/MAY 2011)

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 36
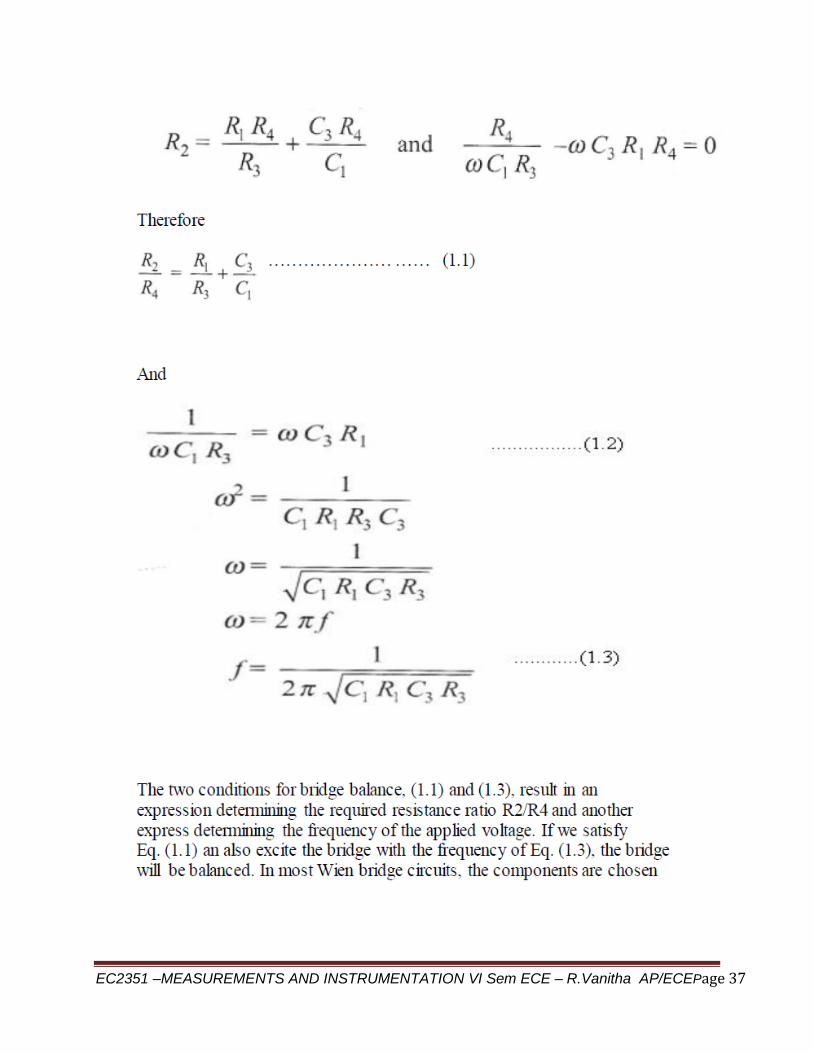
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 37
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 38
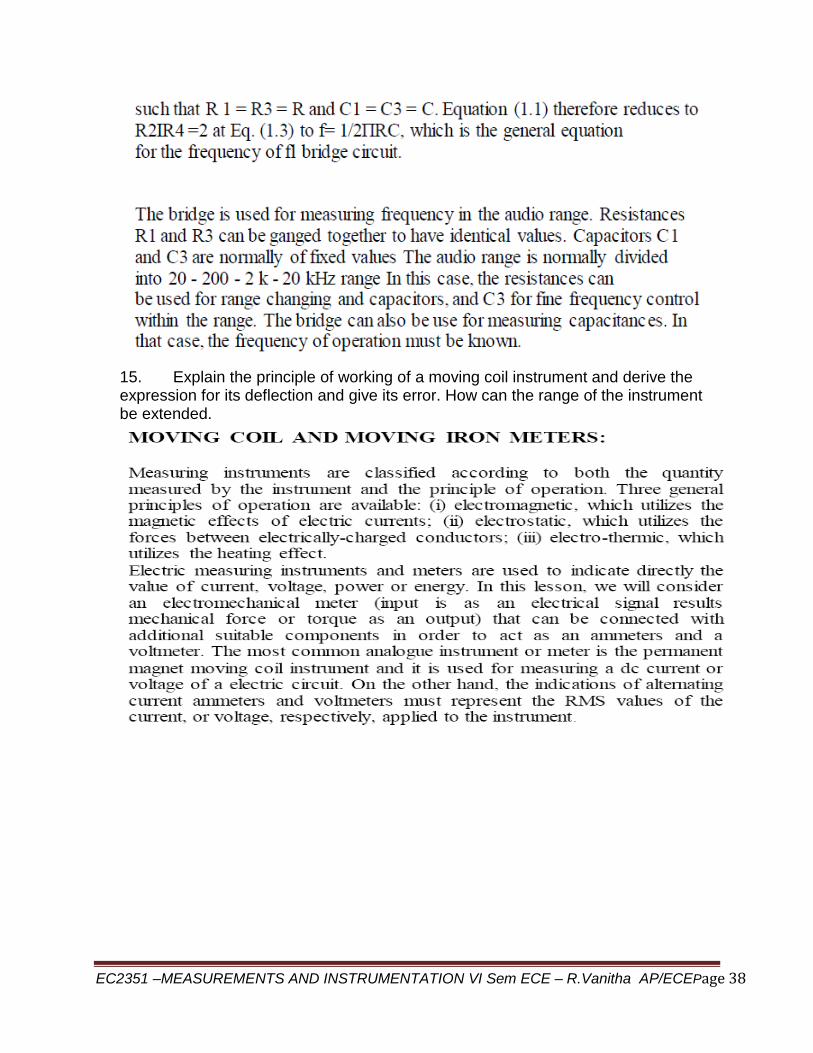
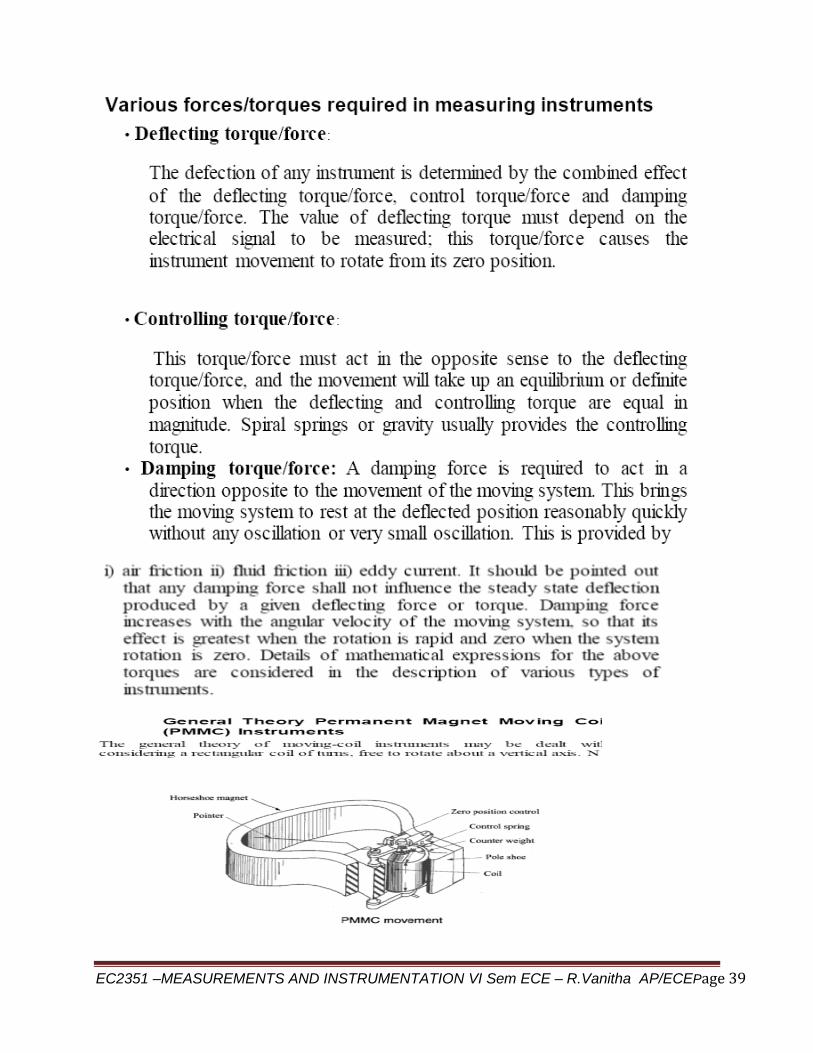
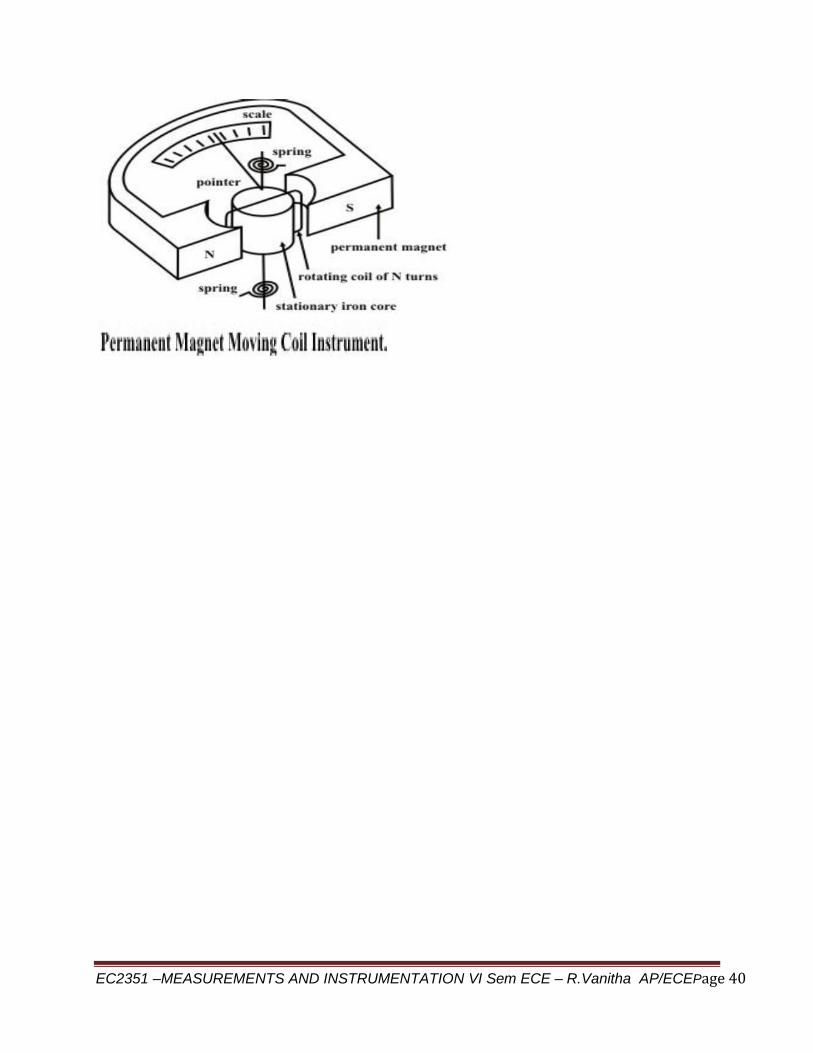
15. Explain the principle of working of a moving coil instrument and derive the expression for its deflection and give its error. How can the range of the instrument be extended.
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 39
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 40
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 41

EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 42
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 43
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 44
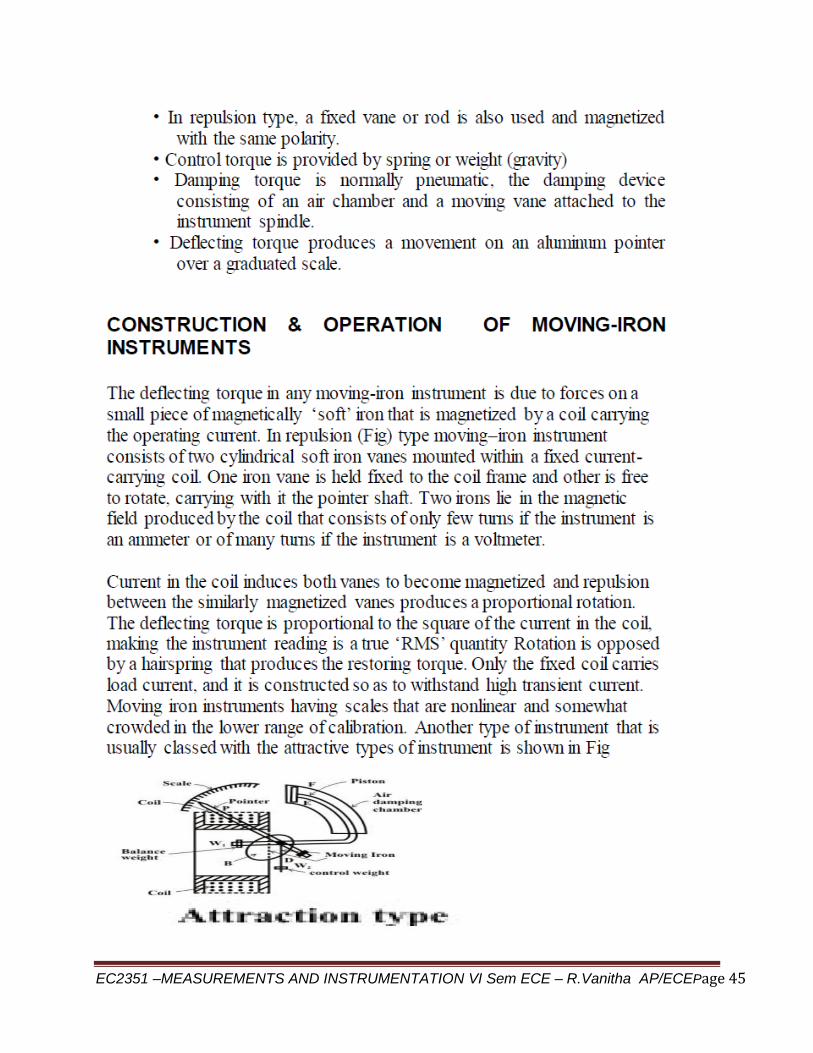
16. Explain in detail about Moving Iron Instrumentation?
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 45
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 46
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 47
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 48
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 49
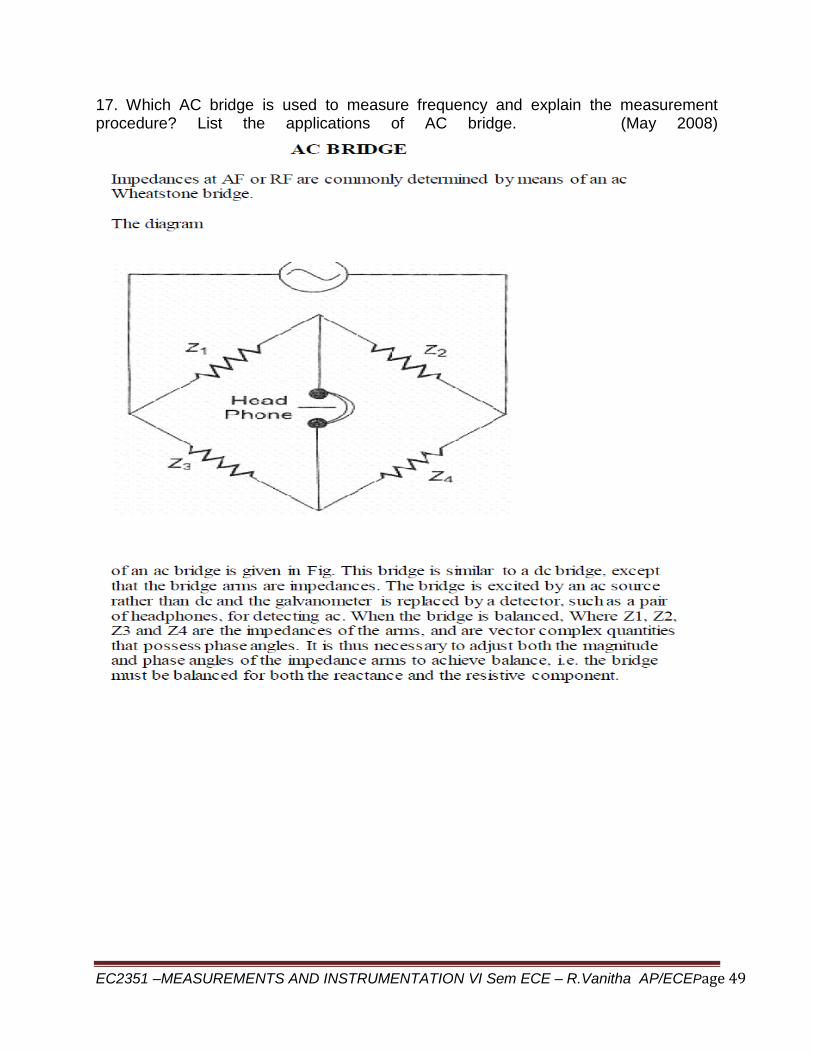
17. Which AC bridge is used to measure frequency and explain the measurement procedure? List the applications of AC bridge. (May 2008)
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 50
EC2351 –MEASUREMENTS AND INSTRUMENTATION VI Sem ECE – R.Vanitha AP/ECEPage 51
Problem:
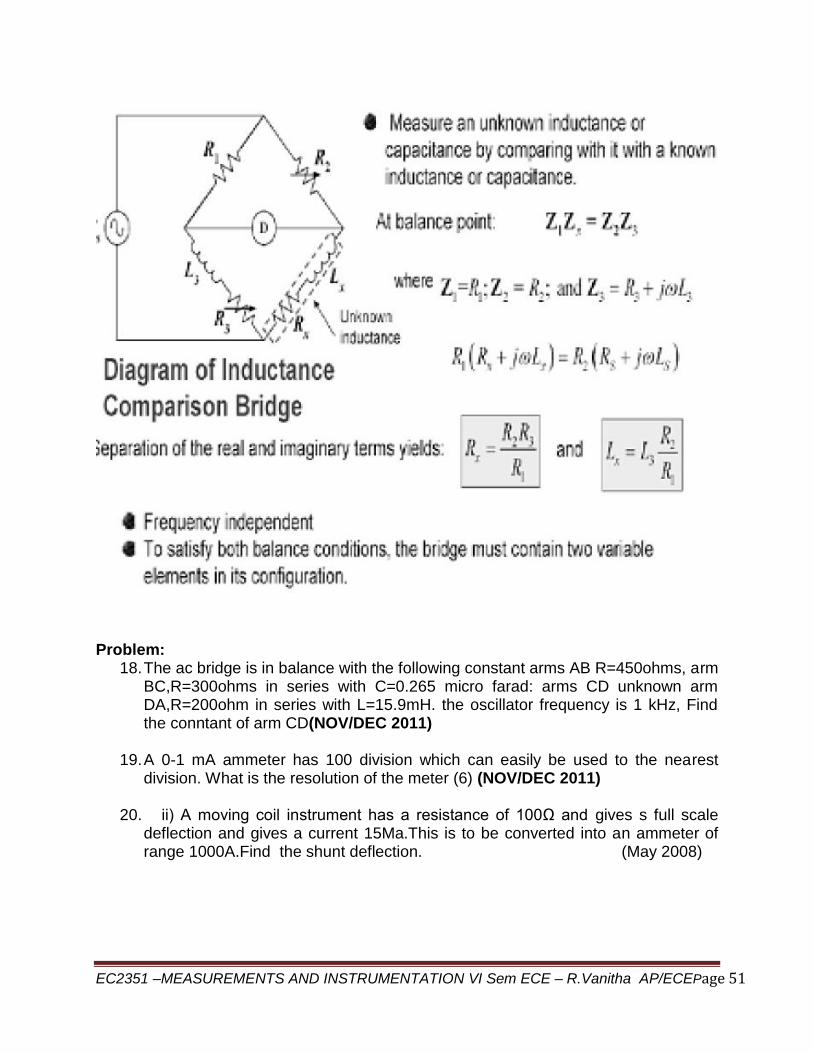
18. The ac bridge is in balance with the following constant arms AB R=450ohms, arm BC,R=300ohms in series with C=0.265 micro farad: arms CD unknown arm DA,R=200ohm in series with L=15.9mH. the oscillator frequency is 1 kHz, Find the conntant of arm CD(NOV/DEC 2011)
19. A 0-1 mA ammeter has 100 division which can easily be used to the nearest
division. What is the resolution of the meter (6) (NOV/DEC 2011)
20. ii) A moving coil instrument has a resistance of 100Ω and gives s full scale deflection and gives a current 15Ma.This is to be converted into an ammeter of range 1000A.Find the shunt deflection. (May 2008)