la geometria dell'interazione: un paradigma "monista" per la logica
TRANSCRIPT

La geometria dell’interazione: un paradigma“monista” per la logica
Paolo Pistone
Sommario
La geometria dell’interazione (GoI) nasce alla fine degli anni ’80 comeriformulazione geometrica del λ-calcolo, attraverso una profonda riflessionematematica sulla nozione di linearità in logica. A più di vent’anni dallasua comparsa, si può dire che il più ambizioso risultato di GoI sia quello diaver presentato una morfologia radicalmente “monista” per la logica, ossiaben lontana dall’abituale dualismo tra sistemi formali (la sintassi) e modelli(la semantica). Piuttosto, questa morfologia, incentrata sulla dualità traprova e test, sembra fornire condizioni di possibilità puramente logiche peruna tale, ormai paradigmatica, distinzione. In questa breve presentazioneproverò a introdurre alcuni aspetti caratteristici e alcune motivazioni di unatale “svolta” geometrica.
1 IntroduzioneIl programma della GoI viene lanciato alla fine degli anni ’80 attraverso una serie diarticoli ([Gir88, Gir89b, Gir89a, Gir90]), nei quali vengono gettate le basi per unariformulazione della teoria della dimostrazione “Curry-Howard” (calcolo dei sequen-ti, eliminazione del taglio, λ-calcolo puro e tipato, . . . ) nel linguaggio delle algebredi operatori; in particolare, attraverso lo studio di un’equazione la cui soluzione,come vedremo, esprime in forma geometrica il contenuto dell’Hauptsatz, tale pro-gramma propone una descrizione “sintetica” della dinamica del calcolo dei sequen-ti e del λ-calcolo, priva dei difetti tipici degli approcci sintattici (commutazioni,indeterminismo, scarsa sensibilità alla complessità computazionale, ecc.):
We would like to define independently of any concrete machine, anyextant language, the mathematical notion of an algorithm [...] so that itwould be possible to establish general results which hold once for all. [Gir90]
In esplicita rivolta tanto contro il “soggettivismo” di cui soffrono molti risultatilogici e informatici, crucialmente dipendenti dalla scelta di un opportuno sistema
1

formale o modello di calcolo (il teorema di Gödel e le “teorie per l’aritmetica”,la complessità e la macchina di Turing, . . . ), quanto contro l’“oggettivismo” degliapprocci puramente semantici, che trascurano ogni riferimento agli aspetti costrut-tivi e procedurali della logica, la ricerca su GoI ha progressivamente sviluppatoe raffinato una morfologia (ossia un modo di scrivere la) logica che si oppone ra-dicalmente alla tradizionale distinzione tra prove (artefatti sintattici) e modelli(strutture matematiche).
In quanto segue cercherò di illustrare brevemente alcune delle ragioni che leganole prospettive tecniche e le ambizioni logico-filosofiche di questo programma diricerca, limitandomi per lo più alla parte “finita” della GoI, ossia a quella che puòessere descritta attraverso algebre di matrici.
2 La dualità prove-testNella rappresentazione della logica si ha in genere a che fare con due tipi distinti dientità, vale a dire le prove, ovvero le derivazioni in un qualche sistema formale, ei modelli, le strutture matematiche che realizzano ciò che è espresso dalla formula(se chiusa) che può comparire come conclusione di una prova; la relazione traformule (e le loro rispettive prove) e modelli è dunque una relazione semantica: leprime si riferiscono ai secondi.
D’altra parte, almeno nel caso della logica del primo ordine, tale relazione diriferimento non è puramente arbitraria, ma è determinata (e in un certo sensogiustificata) da due noti risultati, che stabiliscono una sorta di dualità, nel sensodella geometria proiettiva (punti duali ai piani), tra prove e (contro-)modelli,:
Correttezza se esiste una prova di A, allora non esiste un modello di ¬A;
Completezza se non esiste un modello di A, allora esiste una prova di ¬A.
La caratteristica principale di questa dualità è che entità duali non si incontranomai: se A ammette una prova, un contromodello semplicemente non esiste! Questocomporta, in particolare, che, al contrario di linee e punti, i modelli non possonodiscriminare tra loro le prove di una stessa formula:
In this perspective, a specific proof is only a bureaucratic artifact com-puting a denotation, period. [Gir06]
Una analoga dualità può essere estratta dalla descrizione costruttivista dellalogica, secondo le tradizionali clausole BHK: ad esempio, nella clausola
Una prova di A ∧B è una coppia < a, b >, dove a è una prova di A e b è una prova di B(1)
2

possiamo identificare due entità: la prova, ovvero la coppia < a, b >, e il controllo,costituito da due test : il primo verifica che a è una prova di A, il secondo che b èuna prova di B. Un test per A ∧ B è dato quindi da un test per A o un test perB. In generale, se indichiamo con A l’insieme delle prove di A e con At l’insiemedei test per A, abbiamo la seguente situazione:
(A ∧B)t = At ∨Bt
(A ∨B)t = At ∧Bt
(A⇒ B)t = A ∧Bt
(2)
che induce una dualità tra prove e test, anche se non è ancora chiaro (il paradigmacostruttivista non ce lo spiega) in cosa consista un test, e come interagiscano traloro una prova e un test.
Se le prove sono la sintassi, i test, in questa lettura, costituiscono propriamentela semantica, ovvero la valutazione delle prove. Va osservato che tali valutazioni,attraverso i test, ci dicono come la prova deve essere fatta, per essere una provadi una certa formula, e hanno dunque un aspetto normativo: presuppongono chela prova abbia una certa forma.
Illustrerò due distinte prospettive, fortemente correlate, per la caratterizzazionelogica dei test: secondo la prospettiva dinamica, la valutazione di una prova è datada come questa si comporta quando interagisce nei contesti rilevanti. Per esempio,un programma per una certa funzione aritmetica f(n) è valido se, ogni volta chegli viene dato in input un dato che rappresenta l’intero n, l’esecuzione produce (inun tempo arbitrario ma finito) la rappresentazione dell’intero f(n).
Nella logica una tale prospettiva corrisponde a richiedere che una prova Π di` A, quando viene tagliata con un’arbitraria prova Λ di A,Γ ` ∆, può essereridotta in tempo finito in una prova di Γ ` ∆. E’ sufficiente infatti richiedere cheΛ sia una prova cut-free per verificare che quest’ultima costituisce un test per A,nel senso delle (2): ad esempio, se Π è un’arbitraria prova di A ∧ B, e Λ1,Λ2 leseguenti prove, .... Λ′1
A ` ΓA ∧B ` Γ
.... Λ′2B ` Γ
A ∧B ` Γ (3)
allora, perchè un taglio tra Π e Λ1 o Λ2 possa essere eliminato, Π deve potersiridurre alla seguente forma .... Π1
` A
.... Π2
` B` A ∧B (4)
Ciò che le derivazioni (3) esprimono è allora proprio che un test per A ∧B è datoda un test per A o da un test per B.
3
I limiti fondamentali della prospettiva dinamica sono dovuti proprio alla sua di-pendenza dalla nozione di esecuzione: da una parte, infatti, l’esecuzione di un pro-gramma (o, equivalentemente, di una prova) può richiedere risorse spazio-temporaliirrealistiche, rendendo altrettanto irrealistica la possibilità di una concreta valida-zione delle prove (ad esempio, se f(n) è una funzione non polinomiale). Dall’altra,se prendiamo il caso del programma che simula f(n) (o equivalentemente quellodi una prova di un enunciato Π0
1), la validazione della prova richiede l’applicazionedi un numero infinito di test, ed è dunque a priori impossibile.
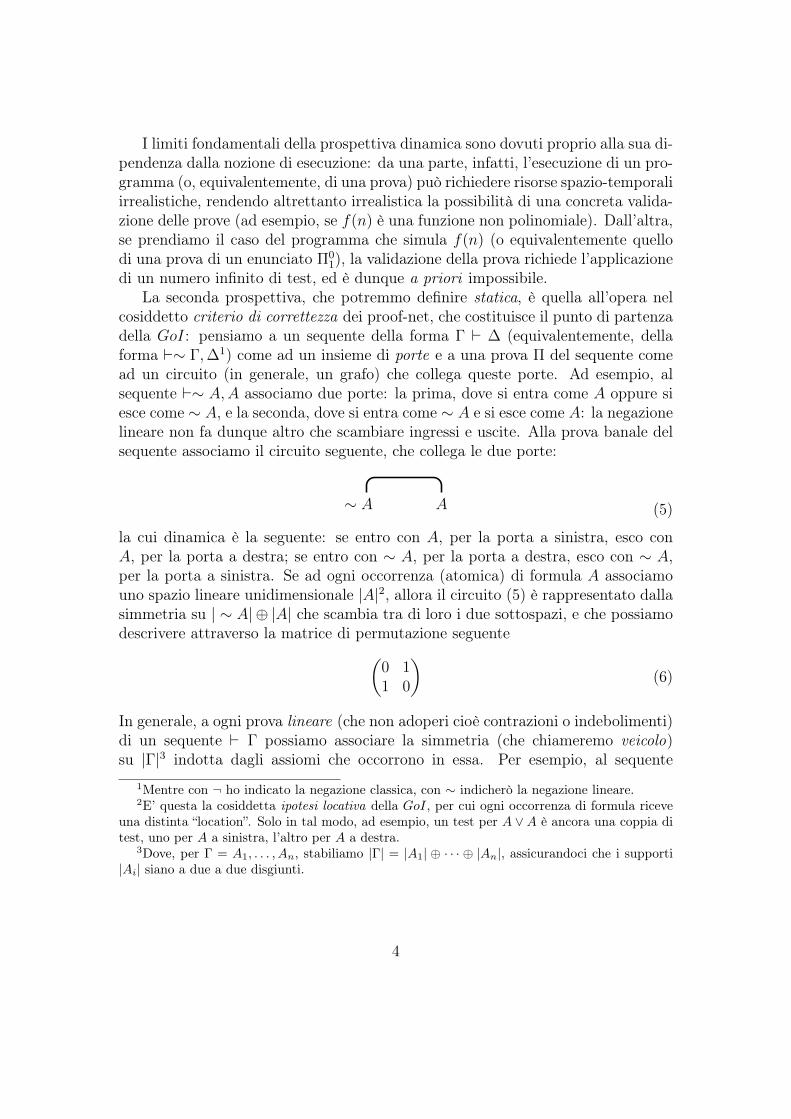
La seconda prospettiva, che potremmo definire statica, è quella all’opera nelcosiddetto criterio di correttezza dei proof-net, che costituisce il punto di partenzadella GoI: pensiamo a un sequente della forma Γ ` ∆ (equivalentemente, dellaforma `∼ Γ,∆1) come ad un insieme di porte e a una prova Π del sequente comead un circuito (in generale, un grafo) che collega queste porte. Ad esempio, alsequente `∼ A,A associamo due porte: la prima, dove si entra come A oppure siesce come ∼ A, e la seconda, dove si entra come ∼ A e si esce come A: la negazionelineare non fa dunque altro che scambiare ingressi e uscite. Alla prova banale delsequente associamo il circuito seguente, che collega le due porte:
∼ A A (5)
la cui dinamica è la seguente: se entro con A, per la porta a sinistra, esco conA, per la porta a destra; se entro con ∼ A, per la porta a destra, esco con ∼ A,per la porta a sinistra. Se ad ogni occorrenza (atomica) di formula A associamouno spazio lineare unidimensionale |A|2, allora il circuito (5) è rappresentato dallasimmetria su | ∼ A| ⊕ |A| che scambia tra di loro i due sottospazi, e che possiamodescrivere attraverso la matrice di permutazione seguente(
0 11 0
)(6)
In generale, a ogni prova lineare (che non adoperi cioè contrazioni o indebolimenti)di un sequente ` Γ possiamo associare la simmetria (che chiameremo veicolo)su |Γ|3 indotta dagli assiomi che occorrono in essa. Per esempio, al sequente
1Mentre con ¬ ho indicato la negazione classica, con ∼ indicherò la negazione lineare.2E’ questa la cosiddetta ipotesi locativa della GoI, per cui ogni occorrenza di formula riceve
una distinta “location”. Solo in tal modo, ad esempio, un test per A ∨A è ancora una coppia ditest, uno per A a sinistra, l’altro per A a destra.
3Dove, per Γ = A1, . . . , An, stabiliamo |Γ| = |A1| ⊕ · · · ⊕ |An|, assicurandoci che i supporti|Ai| siano a due a due disgiunti.
4
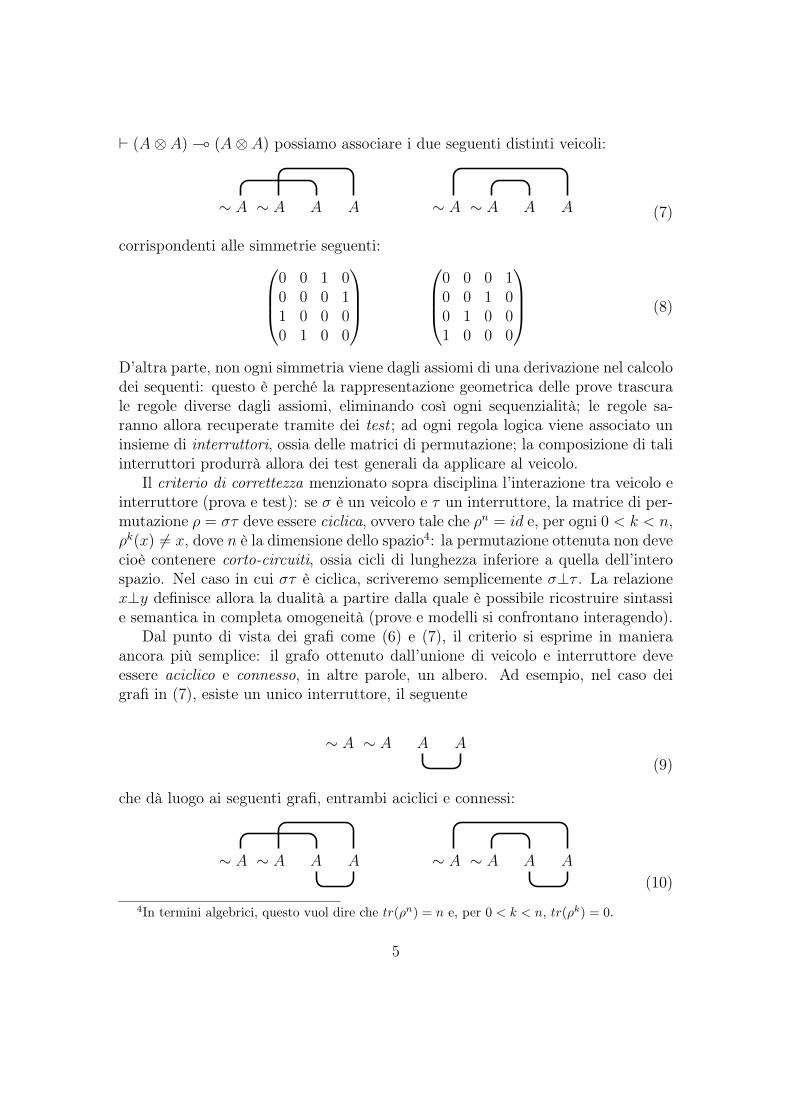
` (A⊗ A) ( (A⊗ A) possiamo associare i due seguenti distinti veicoli:
∼ A ∼ A A A ∼ A ∼ A A A (7)
corrispondenti alle simmetrie seguenti:0 0 1 00 0 0 11 0 0 00 1 0 0
0 0 0 10 0 1 00 1 0 01 0 0 0
(8)
D’altra parte, non ogni simmetria viene dagli assiomi di una derivazione nel calcolodei sequenti: questo è perché la rappresentazione geometrica delle prove trascurale regole diverse dagli assiomi, eliminando così ogni sequenzialità; le regole sa-ranno allora recuperate tramite dei test ; ad ogni regola logica viene associato uninsieme di interruttori, ossia delle matrici di permutazione; la composizione di taliinterruttori produrrà allora dei test generali da applicare al veicolo.
Il criterio di correttezza menzionato sopra disciplina l’interazione tra veicolo einterruttore (prova e test): se σ è un veicolo e τ un interruttore, la matrice di per-mutazione ρ = στ deve essere ciclica, ovvero tale che ρn = id e, per ogni 0 < k < n,ρk(x) 6= x, dove n è la dimensione dello spazio4: la permutazione ottenuta non devecioè contenere corto-circuiti, ossia cicli di lunghezza inferiore a quella dell’interospazio. Nel caso in cui στ è ciclica, scriveremo semplicemente σ⊥τ . La relazionex⊥y definisce allora la dualità a partire dalla quale è possibile ricostruire sintassie semantica in completa omogeneità (prove e modelli si confrontano interagendo).
Dal punto di vista dei grafi come (6) e (7), il criterio si esprime in manieraancora più semplice: il grafo ottenuto dall’unione di veicolo e interruttore deveessere aciclico e connesso, in altre parole, un albero. Ad esempio, nel caso deigrafi in (7), esiste un unico interruttore, il seguente
∼ A ∼ A A A
(9)
che dà luogo ai seguenti grafi, entrambi aciclici e connessi:
∼ A ∼ A A A ∼ A ∼ A A A
(10)4In termini algebrici, questo vuol dire che tr(ρn) = n e, per 0 < k < n, tr(ρk) = 0.
5
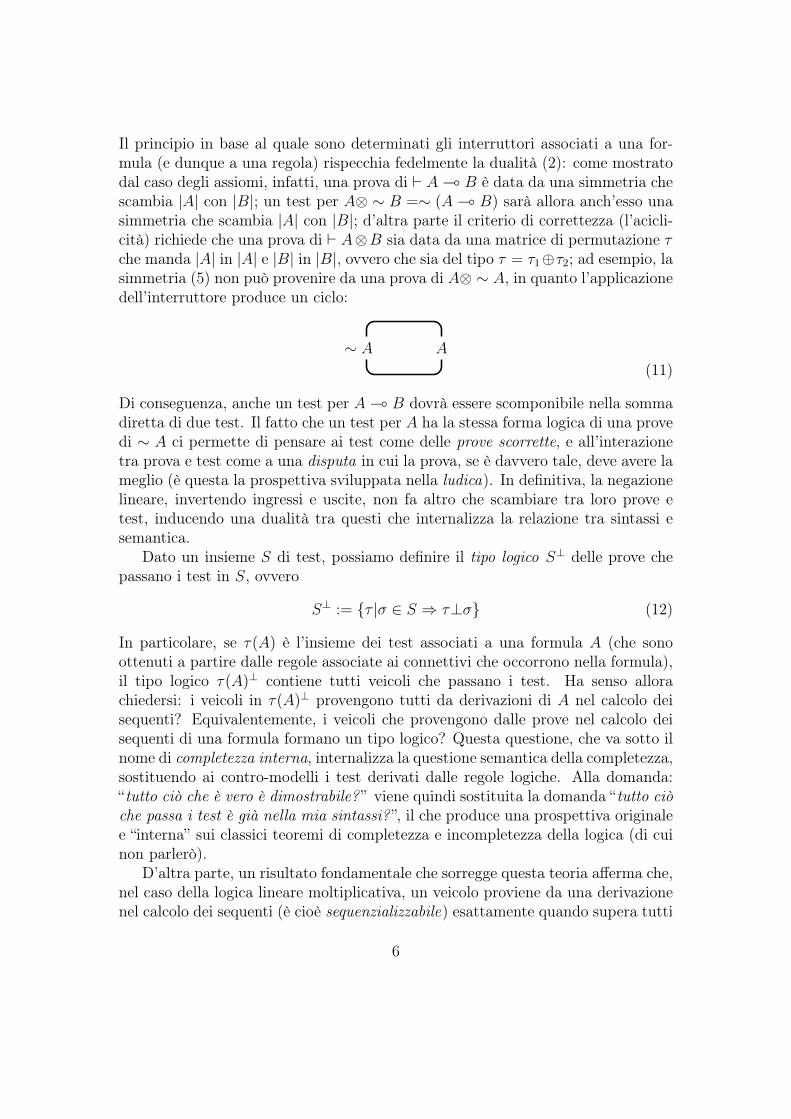
Il principio in base al quale sono determinati gli interruttori associati a una for-mula (e dunque a una regola) rispecchia fedelmente la dualità (2): come mostratodal caso degli assiomi, infatti, una prova di ` A( B è data da una simmetria chescambia |A| con |B|; un test per A⊗ ∼ B =∼ (A( B) sarà allora anch’esso unasimmetria che scambia |A| con |B|; d’altra parte il criterio di correttezza (l’acicli-cità) richiede che una prova di ` A⊗B sia data da una matrice di permutazione τche manda |A| in |A| e |B| in |B|, ovvero che sia del tipo τ = τ1⊕τ2; ad esempio, lasimmetria (5) non può provenire da una prova di A⊗ ∼ A, in quanto l’applicazionedell’interruttore produce un ciclo:
∼ A A
(11)
Di conseguenza, anche un test per A( B dovrà essere scomponibile nella sommadiretta di due test. Il fatto che un test per A ha la stessa forma logica di una provedi ∼ A ci permette di pensare ai test come delle prove scorrette, e all’interazionetra prova e test come a una disputa in cui la prova, se è davvero tale, deve avere lameglio (è questa la prospettiva sviluppata nella ludica). In definitiva, la negazionelineare, invertendo ingressi e uscite, non fa altro che scambiare tra loro prove etest, inducendo una dualità tra questi che internalizza la relazione tra sintassi esemantica.
Dato un insieme S di test, possiamo definire il tipo logico S⊥ delle prove chepassano i test in S, ovvero
S⊥ := {τ |σ ∈ S ⇒ τ⊥σ} (12)
In particolare, se τ(A) è l’insieme dei test associati a una formula A (che sonoottenuti a partire dalle regole associate ai connettivi che occorrono nella formula),il tipo logico τ(A)⊥ contiene tutti veicoli che passano i test. Ha senso allorachiedersi: i veicoli in τ(A)⊥ provengono tutti da derivazioni di A nel calcolo deisequenti? Equivalentemente, i veicoli che provengono dalle prove nel calcolo deisequenti di una formula formano un tipo logico? Questa questione, che va sotto ilnome di completezza interna, internalizza la questione semantica della completezza,sostituendo ai contro-modelli i test derivati dalle regole logiche. Alla domanda:“tutto ciò che è vero è dimostrabile? ” viene quindi sostituita la domanda “tutto ciòche passa i test è già nella mia sintassi? ”, il che produce una prospettiva originalee “interna” sui classici teoremi di completezza e incompletezza della logica (di cuinon parlerò).
D’altra parte, un risultato fondamentale che sorregge questa teoria afferma che,nel caso della logica lineare moltiplicativa, un veicolo proviene da una derivazionenel calcolo dei sequenti (è cioè sequenzializzabile) esattamente quando supera tutti
6

i test, per come li abbiamo definiti sopra. Questo risultato significa due cose: inprimo luogo, che i test definiti dalla dualità logica sono sufficienti a ricostruirela sequenzialità delle prove; in secondo luogo, che le derivazioni nel calcolo deisequenti sono “tutte”, ossia inducono dei tipi logici (completezza interna). L’esten-sione di questo approccio a tutta la logica richiede un’estensione a algebre linearidi dimensione infinita (operatori lineari agenti su uno spazio di Hilbert), che nonapprofondirò in questa brevissima presentazione.
Nel prossimo paragrafo, attraverso l’introduzione del cavallo di battaglia diGoI, ovvero l’equazione di retroazione che definisce la dinamica, la cut-elimination,sarà possibile riunificare e confrontare la prospettiva sui test basata sul crite-rio di correttezza (il quale può essere verificato in tempo lineare nella dimensio-ne dello spazio) con la prospettiva dinamica (che richiede tempi di esecuzionearbitrariamente lunghi).
3 La dinamica e l’aggiunzioneSupponiamo dati due veicoli σ, τ di supporti rispettivamente |Γ|⊕| ∼ A| e |A|⊕|∆|,che possiamo immaginare come provenienti da derivazioni Π1,Π2 rispettivamentedi ` Γ,∼ A e ` A,∆. Eseguire un taglio tra i due veicoli corrisponde allora adefinire un nuovo veicolo ρ di supporto |Γ| ⊕ |∆| che risulti essere il prodotto diun’interazione (finita) tra σ e τ . Anzitutto avremo bisogno di una simmetria λ,che chiameremo taglio, che scambi |A| e | ∼ A| (sfruttando il fatto che A e ∼ Ahanno la stessa dimensione), che interpreta appunto il taglio tra A e ∼ A (e chepossiamo leggere ancora come un test che rappresenta la regola del taglio sotto).
.... Π` Γ, A
.... Λ`∼ A,∆
` Γ,∆cut (13)
ρ è allora definita come segue: sia x ∈ |Γ|, e consideriamo σ(x). Due possibilitàoccorrono:
1 σ(x) è ancora in |Γ|, e allora definitamo ρ(x) = σ(x);
2 σ(x) è in |A|: siamo entrati nella “combat zone”[Gir07]. Applicando il taglio λ cispostiamo in | ∼ A| e possiamo invocare τ . Ancora una volta due possibilitàoccorrono:
2.1 σλτ(x) ∈ |∆|, ovvero siamo usciti dalla “combat zone”, e allora definiamoρ(x) = σλτ(x);
7

2.2 σλτ(x) ∈ | ∼ A|, siamo ancora nella “combat zone”, e ci spostiamoancora verso |A| attraverso λ, dove potremo invocare σ: fissiamo x :=σλτλ(x) e torniamo al punto 1.
Il caso in cui x ∈ |∆| viene trattato in maniera del tutto analoga. Sia per semplicità∆ = ∅; l’algoritmo appena presentato può allorad essere espresso algebricamentecome segue: sia τ ′ = λτλ di supporto |A| e decomponiamo σ in blocchi comesegue: [
σΓΓ σΓA
σAΓ σAA
](14)
dove σXY è un’applicazione lineare da |X| a |Y |. Allora possiamo scrivere, inmaniera un po’ scorretta
ρ = σΓΓ + σΓA(τ ′ + τ ′στ ′ + τ ′στ ′στ ′ + · · ·+ τ ′(στ ′)n + . . . )σAΓ (15)
D’altra parte, la procedura descritta sopra non assicura che ρ sia effettivamentedefinita per ogni valore di x ∈ |Γ| ⊕ |∆|: potremmo infatti incorrere in un circolovizioso all’interno della “combat zone”, ovvero in un y ∈ |A| tale che, per un certoN ∈ N si abbia τ ′(στ ′)N(y) = y; allora, se σ(x) = y, non riusciremo in tempofinito a stabilire un valore per ρ(x).
Dal punto di vista algebrico, osserviamo che l’espressione in parentesi in (15)può essere descritta in modo matematicamente più corretto tramite la serie
∑∞n=0 τ
′(στ ′)n.Un semplice calcolo mostra che, nel caso in cui questa serie converga, essa è ugualea τ ′(I−στ ′)−1 (e d’altra parte l’invertibilità di I−στ ′ implica la convergenza dellaserie), e dunque la (15) può essere scritta in forma compatta come
ρ = σΓΓ + σΓAτ′(I − στ ′)−1σAΓ (16)
Nel caso in cui τ ′(στ ′)N(y) = y si verifica facilmente che I − στ ′ non può essereinvertibile (equivalentemente, la serie non converge), e dunque ρ è indefinita.
Ora, il risultato centrale della GoI è stato proprio la dimostrazione del fattoche, per veicoli che provengono da derivazioni nel calcolo dei sequenti, l’invertibilitàè sempre garantita dalla nilpotenza dell’operatore στ ′, ovvero dall’esistenza di unN ∈ N tale che (στ ′)N = 0: questa corrisponde infatti esattamente al fatto che nonesistano circoli viziosi nella “combat zone”, in quanto riduce la serie
∑∞n=0 τ
′(στ ′)n
alla somma (e dunque alla computazione) finita
στ ′ + στ ′στ ′ + · · ·+ (στ ′)N (17)
La nilpotenza di στ ′ è dunque un modo del tutto geometrico di caratterizzare lanormalizzazione forte del calcolo dei sequenti, dal momento che lo stesso algoritmopresentato sopra (e dunque la formula (15)) sintetizza ogni possibile strategia di
8

x x′
y
y′φσ
Figura 1: l’equazione di retroazione
normalizzazione sintattica: è questo il grande pregio di aver “dimenticato” le regolee tenuto soltanto gli assiomi.
La procedura appena illustrata ci permette di definire, dato un veicolo φ disupporto | ∼ A| ⊕ |B| e un veicolo σ di supporto |A| = | ∼ A|, l’applicazione di φ(che possiamo pensare come una funzione) a σ (il suo argomento):
[φ]σ := φBB + φBAσ(I − φAAσ)−1φAB (18)
definita per I − φAAσ invertibile. In effetti si può dimostrare che [φ]σ è l’unicasoluzione, se esiste, dell’equazione (per x, x′ ∈ |B|, y, y′ ∈ |A|)
φ(x+ y) = x′ + y′
σ(y′) = y(19)
chiamata equazione di retroazione, in quanto esprime una retroazione (un feedback)sulla variabile y (vedi illustrazione sotto) e che si può esprimere in forma matriciale(sfruttando il fatto che σ è una simmetria) come[
φBB φBA
φAB φAA − σ
] [xy
]=
[x′
0
](20)
da cui si ottiene facilmente la (18).L’applicazione così definita induce un’aggiunzione5, che ci permette di riunifi-
care elegantemente tutta la teoria esposta finora: innanzitutto, se pensiamo a φcome a una prova di A ( B, per l’identità A ( B =∼ B (∼ A sappiamo giàche φ può essere applicata agli elementi di ∼ B, ovvero a un test τ per B, perprodurre un test [φ]τ per A:
[φ]τ := φAA + φABτ(I − φBBτ)−1φBA (21)5Se f : H → K è un operatore lineare tra due spazi di Hilbert, l’aggiunto f∗ : K → H di f
è l’operatore definito dall’identità 〈f(x)|y〉 = 〈x|f∗(y)〉. Si noti che i veicoli della GoI, essendosimmetrie, sono autoaggiunti.
9
ammesso che I − φBBτ sia invertibile. Si osservi che il veicolo σ + τ è somma diuna prova per A e un test per B, ovvero è un test per A( B. E’ possibile alloradimostrare che vale la seguente equivalenza:
φ(σ + τ) ciclica ⇔ φAAσ nilpotente e ([φ]σ)τ ciclica (22)
ma anche
φ(σ + τ) ciclica ⇔ φBBτ nilpotente e ([φ]τ)σ ciclica (23)
Per rendere più evidente l’aggiunzione, limitandosi a operatori di norma ≤ 1 inuna opportuna algebra (in cui abbia senso il determinante), è possibile introdurrel’applicazione simmetrica scalare σ, τ 7→ det(I − στ), che “conta” i cicli nel grafoottenuto dall’interazione di σ e τ (ad esempio, se στ è nilpotente, det(I−στ) = 1,mentre se I − στ non è invertibile, det(I − στ) = 0). La dualità può essere quindiscritta come
σ⊥τ ⇔ det(I − στ) 6= 0, 1 (24)
Se φAAσ e φBBτ sono nilpotenti, allora si verifica
det(I − ([φ]σ)τ) = det(I − ([φ]τ)σ) (25)
La (22) e la (23) permettono di riunificare i due approcci, statico e dinamico,ai test: pensiamo a φ come a un test per σ nel senso dinamico; allora, se [φ]τè nilpotente, produce un test statico e allora la ciclicità di ([φ]τ)σ, ossia il fattoche σ passi il test, è equivalente alla nilpotenza di [φ]σ. La nilpotenza è allorala buona condizione, che permette di preservare il criterio di correttezza; d’altraparte, l’assenza di corto-circuiti in φ(σ + τ) corrisponde alla nilpotenza, ossia allafinitezza, dell’operatore che descrive le computazioni coinvolte.
Riferimenti bibliografici[Gir88] Jean-Yves Girard. Multiplicatives. Logic and Computer Science: new
trends and applications, 1988.
[Gir89a] Jean-Yves Girard. Geometry of interaction I: interpretation of systemF. In Ferro, Bonotto, Valentini, and Zanardo, editors, Logic colloquium,1989.
[Gir89b] Jean-Yves Girard. Towards a geometry of interaction. ContemporaryMathematics, 92, 1989.
[Gir90] Jean-Yves Girard. Geometry of interaction II: deadlock-free algorithms.In International Conference on Computational Logic, Tallinn, 1990.
10

[Gir06] Jean-Yves Girard. Le point aveugle Tome 1, Cours de logique, Vers laperfection. Vision des sciences. Hermann, 2006.
[Gir07] Jean-Yves Girard. Le point aveugle Tome 2, Cours de logique, Versl’imperfection. Vision des sciences. Hermann, 2007.
11