introducción a la automatización lógica programable
TRANSCRIPT
Introducción a la
Automatización Lógica
Programable

Introducción a la automatización
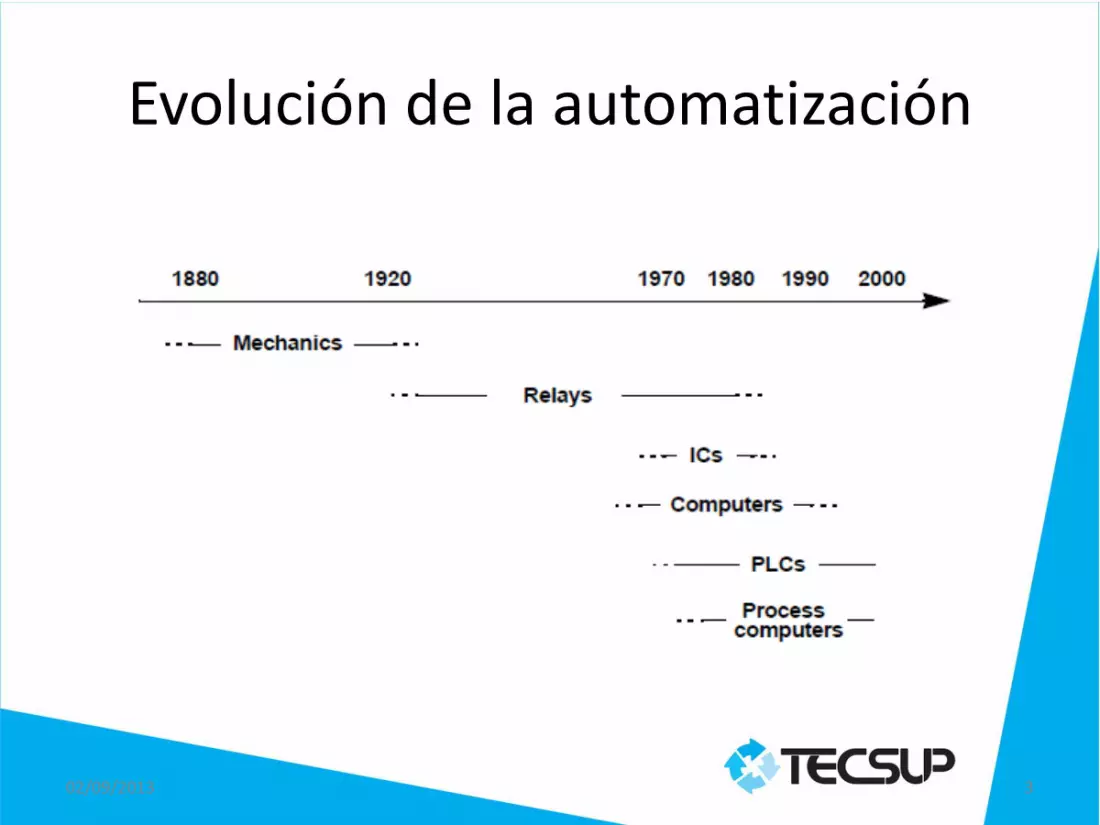
Evolución de la automatización
02/09/2013 3

Componentes típicos de un sistema industrial automático
02/09/2013 4
Interface de Entradas Convierte variables físicas en
señales eléctricas
Controlador Garantiza una operación segura y
económica del proceso de producción
Interface de Salidas Convierte las señales eléctricas del
controlador en modificaciones al proceso
Interface Hombre – Máquina Presenta datos del proceso en
tiempo real y permite la interacción del operador con el proceso
Operador Supervisa la
operación segura y eficiente del proceso

02/09/2013 5
EL AUTÓMATA O CONTROLADOR LÓGICO PROGRAMABLE (PLC)
Se entiende por Controlador Lógico Programable
a toda máquina electrónica, diseñada para
controlar en tiempo real los procesos
secuenciales típicos de un medio industrial.

02/09/2013 6
VENTAJAS E INCONVENIENTES DEL PLC
Ventajas del PLC
• Menor tiempo empleado en la
elaboración de proyectos.
• Posibilidad de introducir
modificaciones sin cambiar el
cableado ni añadir aparatos.
• Mínimo espacio de ocupación.
• Menor costo de mano de obra
de la instalación.
• Economía de mantenimiento.
• Posibilidad de gobernar varias
máquinas con un PLC.
Desventajas del PLC • Hace falta un programador
• Costo inicial elevado
• Requiere mayores cuidados al momento de su instalación.

02/09/2013 7
ESTRUCTURA DE LOS AUTOMÁTAS
PROGRAMABLES
Estructura compacta:
Se distingue por presentar en un
sólo bloque todos sus elementos,
esto es, fuente de alimentación,
CPU, memorias, entradas/salidas,
etc.
Estructura modular:
La estructura de este tipo de
Autómatas se divide en módulos o
partes del mismo que realizan
funciones específicas.
– Estructura americana
– Estructura europea

02/09/2013 8
ARQUITECTURA INTERNA
• La Sección de Entradas: adapta y codifica las señales
procedentes de los dispositivos de entrada
• La Unidad Central de Proceso (CPU): Es la inteligencia del
sistema.
•La Sección de Salidas: Decodifica las señales procedentes de la
CPU, las amplifica y manda con ellas los dispositivos de salida.

02/09/2013 9
•La unidad de alimentación:
Adapta la tensión de red de 220 V 60 Hz (24VDC) a la de
funcionamiento de los circuitos electrónicos internos.
•La unidad de programación:
En los Autómatas más sencillos es un teclado con un display
similar a una calculadora, en otros es una PC.
•Equipos periféricos:
Son aquellos elementos auxiliares, físicamente
independientes del Autómata.
•Interfaces:
Son aquellos circuitos o dispositivos electrónicos que permiten
la conexión a la CPU de los elementos periféricos
OTROS ELEMENTOS DEL PLC
02/09/2013 10
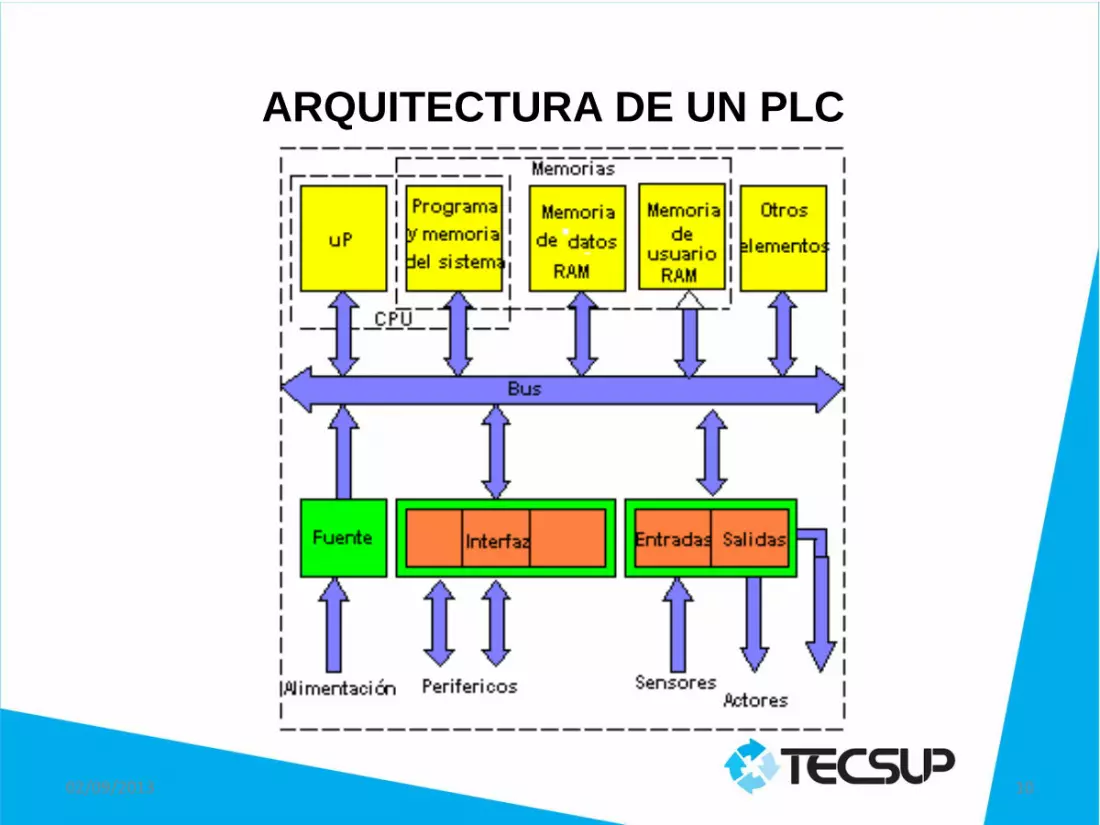
ARQUITECTURA DE UN PLC

02/09/2013 11
MEMORIAS Y TIPOS
Tipo de MemoriaSistema de
programaciónSistema de
borrado
Ante el corte detensión lamemoria
RAMo memoria de lectura – escritura
Eléctrica. Eléctrico. Se pierde, es volátil.
ROMO memoria de sólo lectura.
Durante su procesode fabricación.
Es imposible suborrado.
Se mantiene.
PROMo memoria programable.
Eléctrica. Es imposible suborrado.
Se mantiene.
EPROMo memoria modificable
Eléctrica. Por rayos UV. Se mantiene.
EEPROMo memoria modificable
Eléctrica Eléctrico. Se mantiene.
Memoria es cualquier dispositivo que nos permite almacenar
información en forma de bits

02/09/2013 12
UTILIZACIÓN DE LAS MEMORIAS
• Memoria de usuario: El programa de usuario normalmente se graba en memoria RAM,
ya que no sólo ha de ser leído por el microprocesador, sino que ha de poder ser variado cuando el usuario lo desee.
• Memoria de la tabla de datos: También es del tipo RAM, y en ella se encuentra, por un lado, la
imagen de los estados de las entradas y salidas
• Memoria y programa del sistema: Esta memoria, que junto con el procesador componen la CPU, se
encuentra dividida en dos áreas; la llamada memoria del sistema, que utiliza memoria RAM, y la que corresponde al programa del sistema o firmware que es una memoria ROM.

02/09/2013 13
UNIDAD CENTRAL DE PROCESO, CPU
La CPU (Central Processing Unit) está constituida por los elementos siguientes:
– Micro procesador:
Está constituido por el chip P, el generador de impulsos de onda cuadrada o reloj y algún chip auxiliar.
– Circuitos de la unidad aritmética y lógica ALU:
Es la parte del P donde se realizan los cálculos y las decisiones lógicas.
– Circuito de la unidad de control o UC
Organiza todas las tareas del P
– Registros
Son memorias en las que se almacenan temporalmente los datos.
– Buses
No son circuitos en sí, sino zonas conductoras en paralelo

02/09/2013 14
FUNCIONES DE LA CPU
• Supervisión y control de tiempo de ciclo (watchdog),
tabla de datos, alimentación, batería, etc.
• Autotest en la conexión y durante la ejecución del
programa.
• Inicio del ciclo de exploración de programa y de la
configuración del conjunto.
• Generación del ciclo base de tiempo.
• Comunicación con periféricos y unidad de programación

02/09/2013 15
CICLO BÁSICO DE TRABAJO DE LA CPU

02/09/2013 16
UNIDADES DE ENTRADA – SALIDA (E/S)
Son los dispositivos básicos por donde se toma
la información de los captadores y por donde se
realiza la activación de los actuadores.
Funciones de las unidades de E/S:
Adaptar las tensiones e intensidades de trabajo
de los captadores y actuadores a las de trabajo
de los circuitos electrónicos del Autómata.

Señales Binarias
Señales que solo pueden tomar
dos estados definidos: existe
tensión” o “no existe tensión”,
“conectadas” o “desconectadas”.
En este sentido, las señales
digitales de entrada y salida del
PLC descritas hasta ahora, son
señales binarias.
02/09/2013 17

Señales analógicas
La transmisión de
información analógica está
caracterizada por un
cambio continuo de la
amplitud de la señal.
En la ingeniería de
procesos, la señal de
4…20 mA es transmitida en
una forma puramente
analógica.
02/09/2013 18

Representaciones utilizadas
02/09/2013 19

Definiciones
El bit es la unidad de
información más
pequeña. Solo puede
tomar los valores “0” y
“1”.
El byte es una unidad
compuesta de 8 bits.
La palabra es una unidad
mayor, compuesta de 16
bits = 2 bytes.
Bit Byte
PALABRA
02/09/2013 20
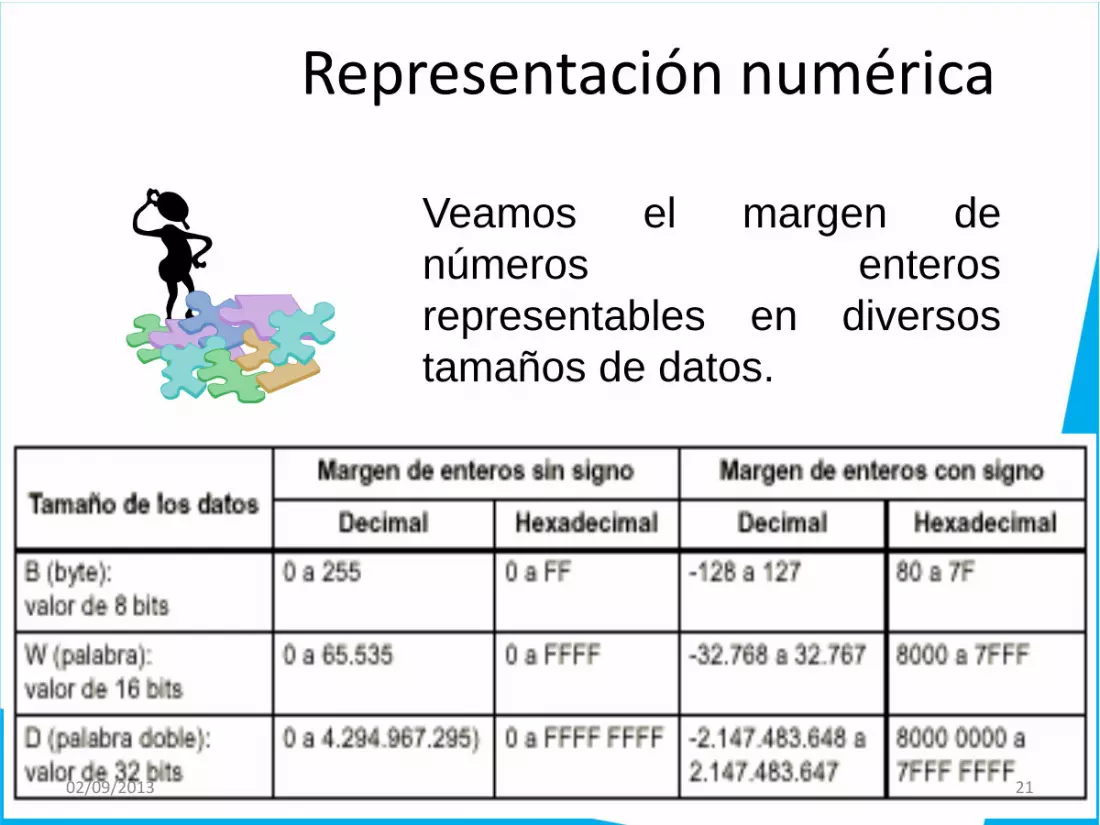
Representación numérica
Veamos el margen de
números enteros
representables en diversos
tamaños de datos.
02/09/2013 21

02/09/2013 22
Interface de Entradas
• Se caracterizan físicamente por sus bornes para acoplar los dispositivos de
entrada o captadores
– Analógicas: Cuando la magnitud que se acopla a la entrada
corresponde a una medida de, por ejemplo, presión, temperatura,
velocidad, etc
– Binarias:
Corresponden a una señal de entrada todo o nada

02/09/2013 23
Interface de Salidas Binarias
– Aquí es donde se conectan o acoplan los dispositivos de salida o actuadores. Tres son los tipos de salidas:
A relé.
A triac.
A transistor

02/09/2013 24
EQUIPOS O UNIDADES DE PROGRAMACION
La unidad de programación es el medio material del que se auxilia el programador para grabar o introducir en la memoria de usuario las instrucciones del programa.
• Funciones principales
– Programación
– Grabación de programas
– Visualización y verificación dinámica del programa
– Modos de servicio
STOP (off-line), o salidas en reposo.
RUN (on-line), o ejecutando el programa.
Otros modos intermedios como MONITOR

02/09/2013 25
TAMAÑO DE LOS AUTÓMATAS
PROGRAMABLES
La clasificación de los PLC en cuanto a su tamaño se realiza en
función del número de sus entradas – salidas
– Gama baja. Hasta un máximo de 128 entradas – salidas. La
memoria de usuario de que disponen suelen alcanzar un valor
máximo de 4 K instrucciones.
– Gama media. De 128 a 512 entradas – salidas. La memoria de
usuario de que disponen suelen alcanzar un valor máximo de
hasta 16 K instrucciones.
– Gama alta. Más de 512 entradas – salidas. Su memoria de
usuario supera en algunos de ellos los 100 K instrucciones.
02/09/2013 26
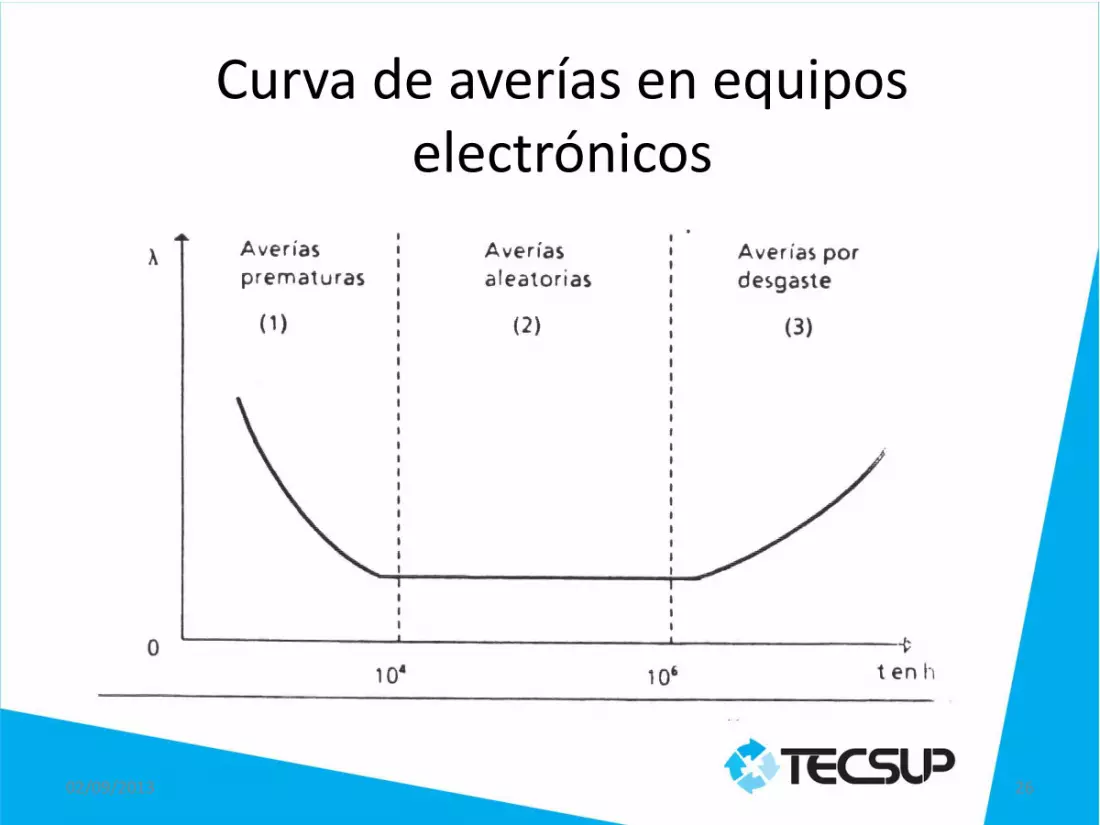
Curva de averías en equipos electrónicos

¿Montaje vertical u horizontal?
Disposición horizontal: 0…60°C
Disposición vertical: 0…40°C
02/09/2013 27

Distancias mínimas de montaje
02/09/2013 28

02/09/2013 29
Manejo e Instalación

02/09/2013 30
Circuito de potencia para alimentación
del PLC

Sistemas de conexión eléctrica ...
02/09/2013 31

Sistema de conexión ...
02/09/2013 32

02/09/2013 33
PRINCIPIO DE FUNCIONAMIENTO DE LAS SEÑALES DE ENTRADA

02/09/2013 34
CONEXIÓN A LAS ENTRADAS DE LOS CONTACTOS SIN TENSIÓN

02/09/2013 35
PROTECCIÓN EN CORRIENTE CONTINUA

02/09/2013 36
PROTECCION DE SALIDAS EN CORRIENTE ALTERNA
02/09/2013 37
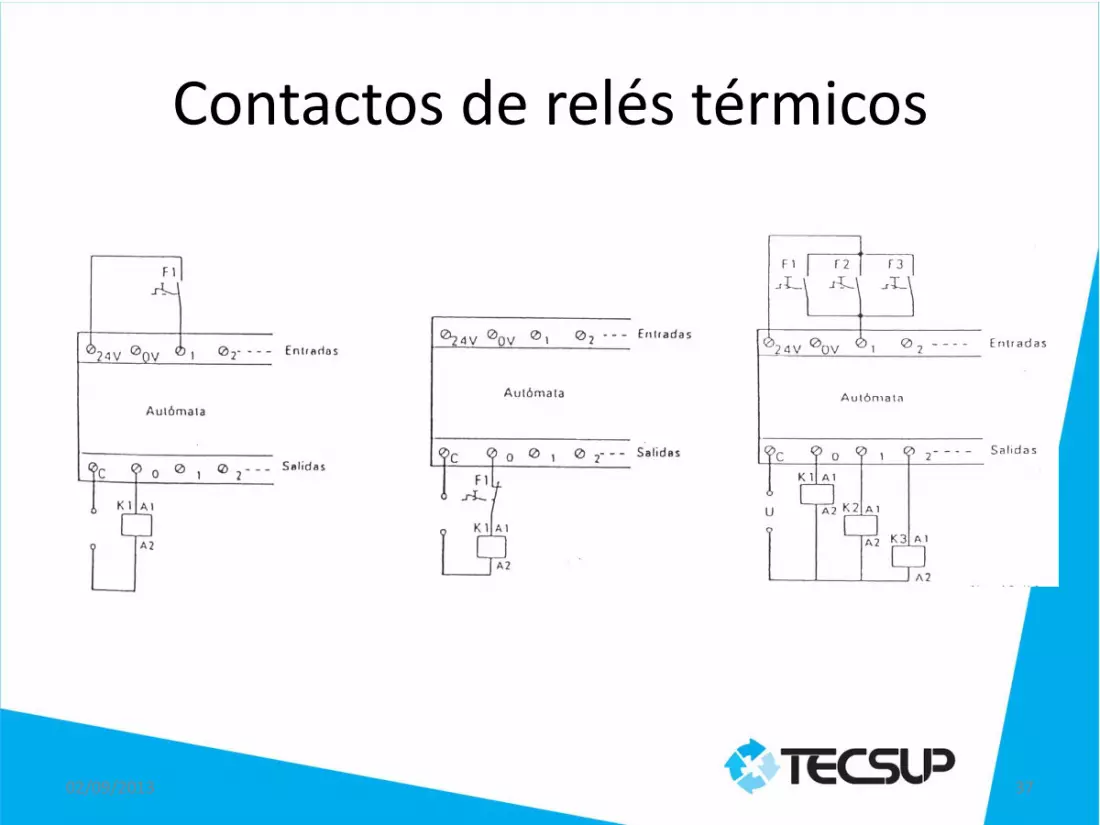
Contactos de relés térmicos
02/09/2013 38
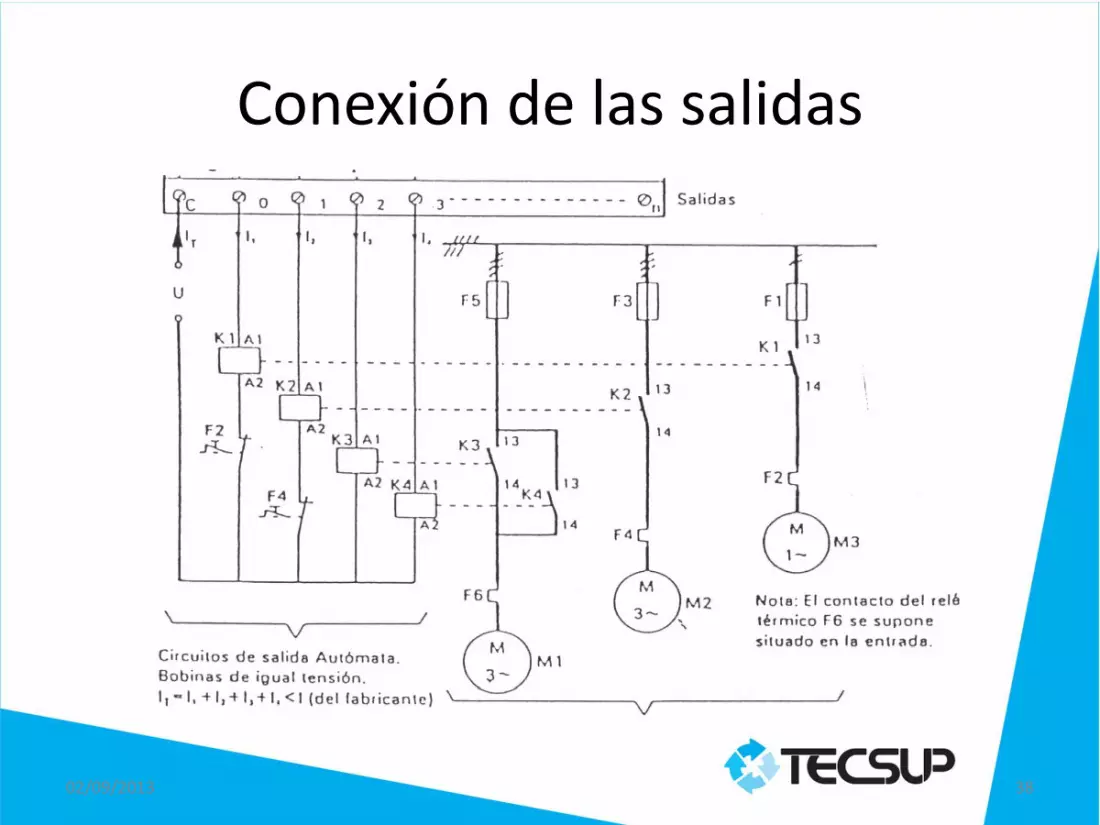
Conexión de las salidas

02/09/2013 39
Acoplamiento de cargas
02/09/2013 40
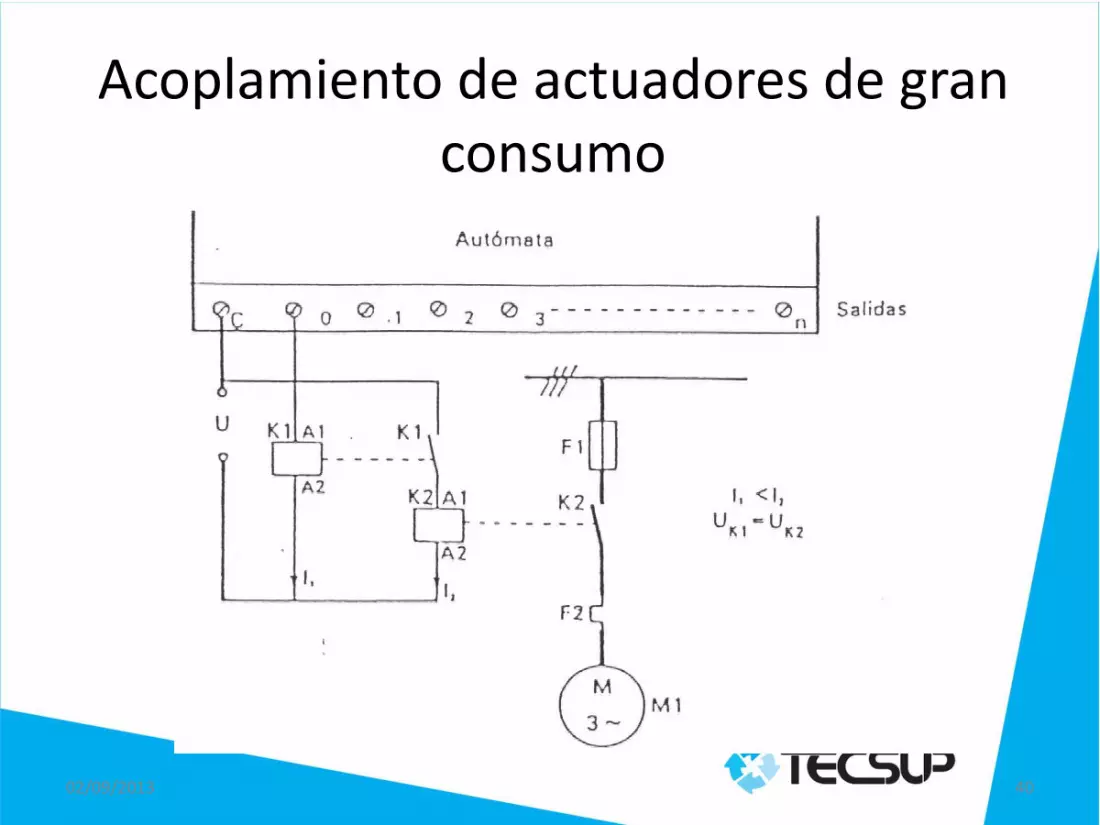
Acoplamiento de actuadores de gran consumo

02/09/2013 41
Conexión de captadores y actuadores
Consideraciones para el tendido de cables
No tender cables de señal cerca de cables de potencia en forma paralela
Tender lo más cerca posible los cables de señal y su línea equipotencial asociada
Evitar prolongar innecesariamente cables o líneas por intermedio de bornes o similares.
Las líneas sensibles a interferencias tenderse con una separación mínima a 1 m de las fuentes perturbadoras.
02/09/2013 42

Conexión con separación galvánica
Para aumentar la inmunidad frente a interferencias entre líneas de señal en DC.
En caso de líneas de señal incompatibles.
En líneas de señal en AC.
... cuando no existe un punto de tierra entre la CPU del controlador y las líneas de señal de E/S.
02/09/2013 43

Conexión sin separación galvánica
Cuando existe un punto de tierra entre la CPU del controlador y las líneas de señal de E/S siempre y
cuando estas últimas sean en DC.
02/09/2013 44

Medidas a considerar
Interferencias
Separación especial entre
equipos y líneas
Puesta a masa de todas las
piezas metálicas inactivas
Filtrado de líneas de red y
de señal
Apantallamiento de los equipos y
líneas
Medidas supresoras especiales.
02/09/2013 45

02/09/2013 46
Mantenimiento del PLC
Mantenimiento preventivo:
• Inspección visual
• Condiciones ambientales
• Medidas de tensión de alimentación
Mantenimiento correctivo:
• Localización de fallas y averías