improvisational choreography as a design language for spatial interaction
TRANSCRIPT
Improvisational Choreography as a design language for Spatial Interaction
CHRYSSA VARNA
This thesis suggests an approach to designing spatial interaction by merging two parallel gradients of choreography and kinetic architecture. It draws observations about how the two disciplines can become complementary towards one another and exchange ideas. Contemporary choreographers and their processes are discussed (focusing on the area of structured improvisation). An architectural research project is presented as a series of built installations. These installations interrogate a range of spatial conditions from purely mechanical automata to interactive systems, using the technology of industrial robotics, computer vision and adaptive computation.
It is suggested that structured improvisation in interaction can be deployed and offer elements of emergence and unpredictability as a design vocabulary. Such a vocabulary is based on a gestural dialog between an installation and its environment (i.e. performer, audience, constructed space). Development of this vocabulary might offer a novel approach to structuring spatial interactivity, that concerns not only the literal movement of a dynamic system, but also the behavior and personal interpretation of a space and its habitats.
introduction
Despite being distinct subjects, dance and architecture share a complementary relationship regarding space and movement. These include bodily movement from the perspective of phenomenology and perception of space, the perspective of the observer (how the audience perceives space from different points of view), and the perspective of a designer using the human body as an interface in order to create forms and shapes.
Hill [2001] says that architecture can be found everywhere, from the incisions of a surgeon to the instructions of a choreographer or the movements of a user. Many artists and architects have investigated the relationship between a moving body and architecture. Areas of research include dance movement as a generator of parametric architectural forms [Stathopoulou, 2011], design of the spatial structure of built space in relation to the spatial structure of embodied experience [Gavrilou, 2003], or collaborations between architects and choreographers for investigating the areas of movement in space, choreography and scenography (Diller & Scofidio 1996, Zaha Hadid 2000 and Jean Nouvel 2002 in collaboration with the choreographer Frederic Flamand).
This thesis analyses specific elements of dance and architecture: choreography and kinetic architecture. It seeks connections between the two disciplines and investigates whether the two can be bridged.
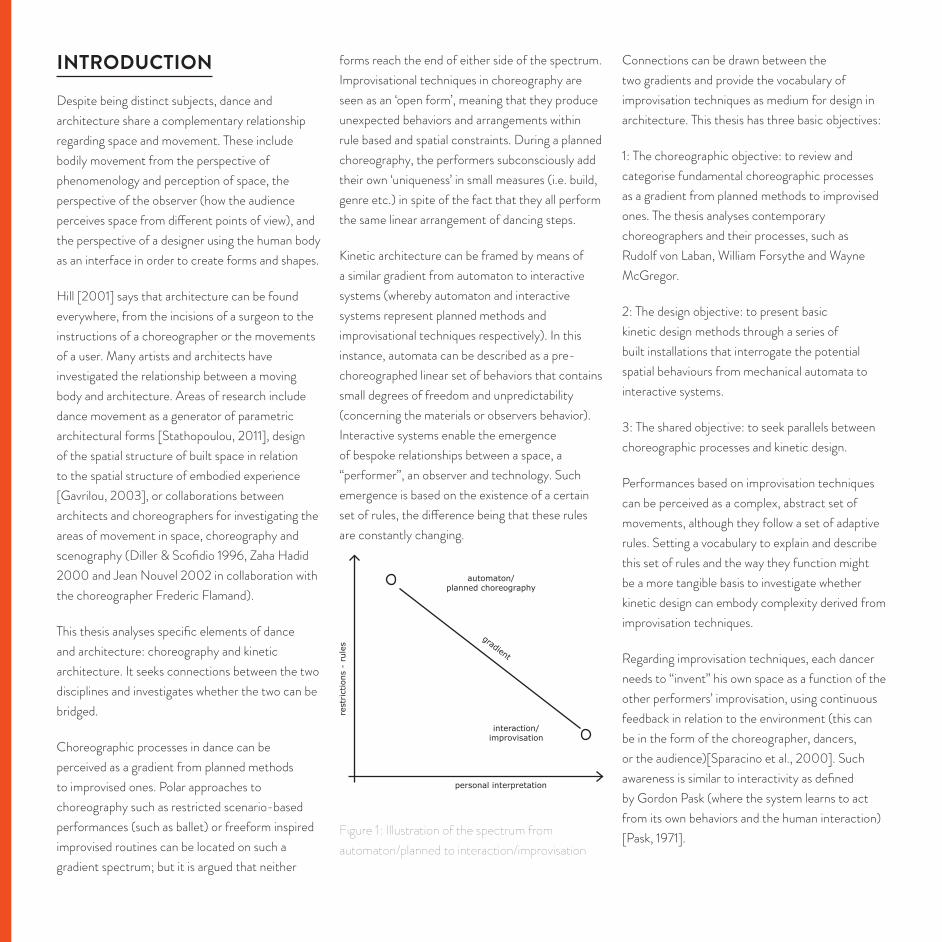
Choreographic processes in dance can be perceived as a gradient from planned methods to improvised ones. Polar approaches to choreography such as restricted scenario-based performances (such as ballet) or freeform inspired improvised routines can be located on such a gradient spectrum; but it is argued that neither
forms reach the end of either side of the spectrum. Improvisational techniques in choreography are seen as an ‘open form’, meaning that they produce unexpected behaviors and arrangements within rule based and spatial constraints. During a planned choreography, the performers subconsciously add their own ‘uniqueness’ in small measures (i.e. build, genre etc.) in spite of the fact that they all perform the same linear arrangement of dancing steps.
Kinetic architecture can be framed by means of a similar gradient from automaton to interactive systems (whereby automaton and interactive systems represent planned methods and improvisational techniques respectively). In this instance, automata can be described as a pre-choreographed linear set of behaviors that contains small degrees of freedom and unpredictability (concerning the materials or observers behavior). Interactive systems enable the emergence of bespoke relationships between a space, a “performer”, an observer and technology. Such emergence is based on the existence of a certain set of rules, the difference being that these rules are constantly changing.
Figure 1: Illustration of the spectrum from automaton/planned to interaction/improvisation
Connections can be drawn between the two gradients and provide the vocabulary of improvisation techniques as medium for design in architecture. This thesis has three basic objectives:
1: The choreographic objective: to review and categorise fundamental choreographic processes as a gradient from planned methods to improvised ones. The thesis analyses contemporary choreographers and their processes, such as Rudolf von Laban, William Forsythe and Wayne McGregor.
2: The design objective: to present basic kinetic design methods through a series of built installations that interrogate the potential spatial behaviours from mechanical automata to interactive systems.
3: The shared objective: to seek parallels between choreographic processes and kinetic design.
Performances based on improvisation techniques can be perceived as a complex, abstract set of movements, although they follow a set of adaptive rules. Setting a vocabulary to explain and describe this set of rules and the way they function might be a more tangible basis to investigate whether kinetic design can embody complexity derived from improvisation techniques.
Regarding improvisation techniques, each dancer needs to “invent” his own space as a function of the other performers’ improvisation, using continuous feedback in relation to the environment (this can be in the form of the choreographer, dancers, or the audience)[Sparacino et al., 2000]. Such awareness is similar to interactivity as defined by Gordon Pask (where the system learns to act from its own behaviors and the human interaction) [Pask, 1971].
rest
rict
ions
- r
ules
personal interpretation
automaton/planned choreography
interaction/improvisation
gradient
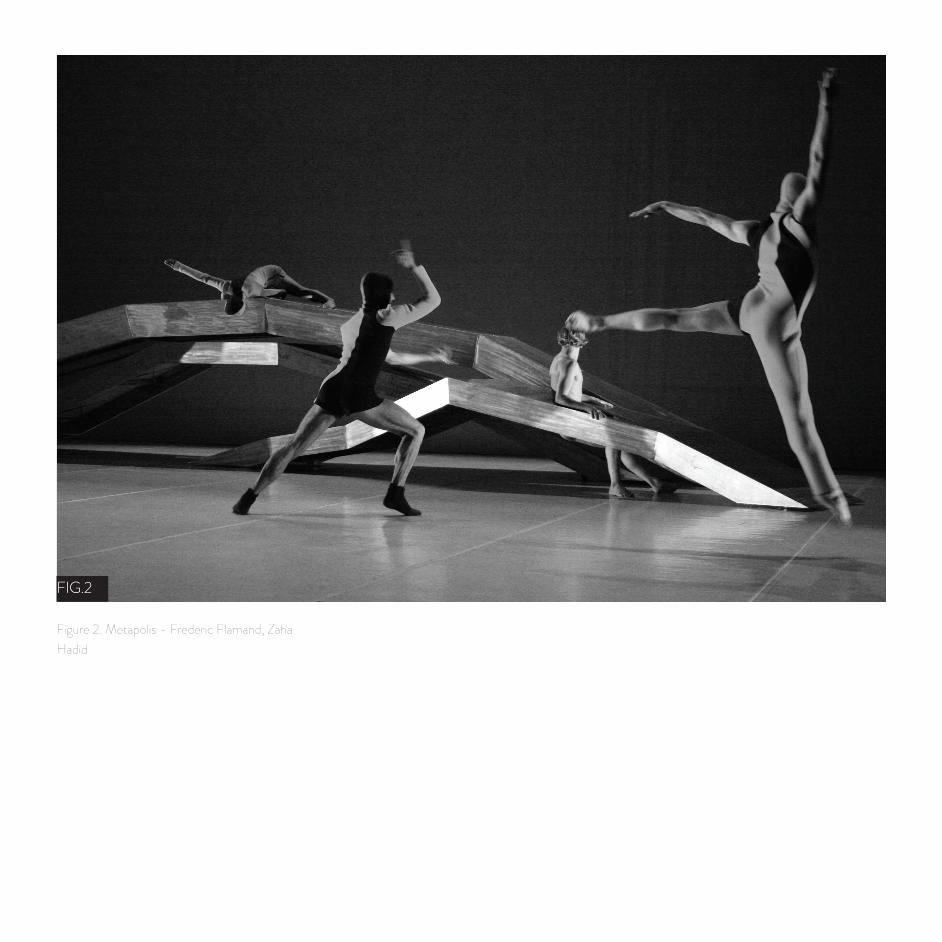
Figure 2. Metapolis - Frederic Flamand, Zaha Hadid
FIG.2
It is suggested that a vocabulary based on structured improvisation can enable a gestural dialog between an installation and a performer, using layers of increasing moving complexity. This is not dissimilar to Brooks’ control systems; where a flexible robot is moving and high level layers subsume the scores of the lower levels [Brooks, 1985].
As a tool for exploring, experiencing and describing choreographed movement and as a bridging tool between dance and architecture, the research examines basic systems for notating dance movement. Accordingly, it analyses the vocabulary of every choreographic process and it investigates the evolution in those systems in parallel to the evolution of the choreographic processes.
2. choreography in dance
As Smith [2000] claims, the composition of a dance (i.e. choreography) is different from the pleasure of moving with skilled accuracy (i.e. dancing). This difference is usually expressed with accelerated motion, rhythmic body gestures and coordinated bodily movement in space and time by a choreographer. Choreographic practice can be considered as the sophisticated composition of full-body movement.
The thesis introduces an observation about choreography which is divided in three categories, depending on the rule of the choreographer, the dancer and the interpretation of the audience:
*planned
*semi-planned and
*unplanned choreography (improvisation). These are examined in the following sections.
2.01. planned choreography
“A choreographer imposes motion and form in detail, leaving no opportunity for the dancer to exercise personal interpretation “
[Grand,1982]
[i] definition
Planned choreography (which most commonly refers to ballet performances) is a highly technical form of dance with its own vocabulary. During a planned choreography, the performers have to follow step by step a linear arrangement of dancing rules, following a completely strategic movement, which was arranged historically by a choreographer. It is a theatrical work in which a choreographer has expressed his ideas in dancing with corresponding environment (music, costumes, scenery and lighting). [Grand, 1982]
According to Marius Petipa, one of the most influential choreographers in ballet, choreography is a purely academic way of creating dance (in terms of structure and composition), with no clear stamp of dancers’ individuality. In his creations he delivers a specific impersonal pattern of a story or scenario -which usually is historically pre-conceived- as a dance narrative representation of an already known story, myth, or tale (e.g. Don Quixote, Sleeping Beauty, The Nutcracker, Swan Lake etc.). The choreographer has the power to make all the decisions, leaving no opportunity for the dancer or the audience to exercise personal interpretation. The performance consists of a particular beginning and end, concerning not only the dancing steps but also the narrative content that the choreography is describing. It is a linear structure that follows a specific narrative and a strategy of movements that intend to convey specific information.
[ii] terminology
The following basic terms are a short sample of a wide glossary of balletic terms. They refer to strategic motions or positions of several parts of the body that create specific movements and forms during a balletic choreography [Grand,1982].
[iii] notation system
The obvious need to indicate dance rhythms accurately led to the development of systems based on music notation. In 1891 many of Petipa’s original creations began to be recorded in the method of dance notation created by Vladimir Stepanov for the Imperial Ballet of St. Petersburg, in his Alphabet of Movements of the Human Body.
It is a simple system, similar to a musical score encoding dance movements of the whole body in anatomical terms. It deconstructs every dance step into the most elementary movements a single part of the body can produce, encoding each movement into a “note” [Hutchinson, 1989].
The idea of adapting music notes to meet the needs in describing movement has continued to remain popular, but careful analysis reveals that music notes lack the required flexibility to record variations in movement timing. They are not sufficiently flexible in design to take care of the many timing and spatial needs in the field of movement notation [Hutchinson, 1989].
Degage:
Jete:
Saute: Ronds de Jambe à Terre:
Attitude:
Arabesque:
To release the foot from a closed to an open position;
To throw the weight of the body from one foot on to the other;
To spring;The movement of the leg in a
circular pattern touching the floor;The position on one leg with the
other lifted in back, the knee bent at an angle of 90degrees;
The position of the body supported on one leg, with the other leg
extended behind the body with the knee straight;

2.02. semi-planned choreography
“Contemporary dance techniques in which a dancer’s movement is triggered by a choreographer or another dancer, leaving small or no opportunity to
exercise personal interpretation”
[i] definition
In the early 1950’s, contemporary dance began to break the mold of planned choreography as an experimental reflection upon the limits of dance. Contemporary choreography is the practice of composing new movements, not only working with bodily restrictions (such as every part being connected, elbows bending only one way etc.) but also with possibilities in a choreography (i.e. create variations of spatial relations between the dancers within a routine) [Hansen, 2011]
Contemporary choreographers develop their creative processes in a way that goes beyond a set of pre-determined rules, but still without leaving a completely personal point of view for the audience or the performer. They usually begin with some creative impulses or ideas, and then physically explore these in the studio with their dancers [Schiphorst 1993].
A whole new glossary has been developed in order to communicate and transfer these ideas. A representative example of this vocabulary is the term “Choreographic Devices”; choreographic tools enabling different compositions, shapes and forms within the framework of a group [Ellfeldt,1998]. They contain the idea that a movement is triggered by the choreographer or another dancer, as a reaction or continuity to the previous movement. These “devices” were not created by a single choreographer at an instant
moment, but are the result of their work in a studio and have spread among the dance community. They are now a common method of composition choreography, created and used by Merce Cunningham, Trisha Brown, Doris Humphrey, Martha Graham, Jose Limon and others.
[ii] terminology
A list of the most important contemporary choreographic devices is cited as an example of how a planned structure can be enriched by semi-planned moves and can create variations that give the dancers small opportunities to react to the choreographer’s instruction in a more personal way.
[iii] notation system
The most commonly used notation system in contemporary dance is Labanotation. It was formed by one of the pioneers of contemporary dance, Rudolf Von Laban; therefore this system had to be flexible enough to respond to the experimental character of contemporary dance [Stathopoulou, 2011]. Laban’s system defines movement description in clearly measurable terms, including the number of dancers, the parts of the body used, the space occupied by the body and the space around it, as well as the parameter of time, the dynamics of movement and others spatial qualities. [Hutchinson,1991].
In order to depict all these terms (body, space, time, dynamics) Laban uses symbols that are placed on a vertical staff consists of three lines. The staff is read from the bottom to top; the vertical dimension represents time passing by and the horizontal dimension represents the symmetry of the body. (See figure 5). Basic symbols depict the direction of movement in angle increments of 45 degrees. More complex combinations of those symbols allow the division of directions more precisely. (See figure 6)
2.03. unplanned choreography / improvisation
[i] definition
Improvisation in performance is the practice of reacting to a set of scores or stimulus and performing (act, dance, sing, play a musical instrument etc) as a combination of intuitive and cognitive reaction. Improvisation is not a closed circuit. It is a dictation of human behavior but it includes the participation of the human mind. A performer engages a set of rules but his interaction with them includes cognitive permission.
Why is improvisation a significant method for performance and architecture? As Foucault has suggested, the structural characteristics of improvisational expression reside in the act of formation and not in a preexisting model. Among its important features are reversibility, discontinuity, specificity, and exteriority with respect to existing models. Improvisation choices are not led by predeterming evaluative procedures By experimenting with improvisational art practices, artists discover “fresh and significant relationships” that “in some measure remake our world” and make “a genuine contribution to
Unison:
Reversals:
Retrogade:
Canon:
Contrast:
Fragmentation:
Mirror:
group movement performed by the whole team at the same time;
performing of the movements of a motif or sequence in reverse order (but not in a backwards direction);
performing backwards, as if rewinding a video.
repeated movement down a line of people one after the other;
creating oppositions for emphasis; oppositions may be of various kinds: gestural, rhythmic, directional etc.
only a part of the movement sequence/motif is manipulated. A
movement is broken down into smaller units;
inverting the movement phrase, executing it as if ‘looking in a mirror’. A forward step becomes a backward step; movement sideward remains in
a lateral plane
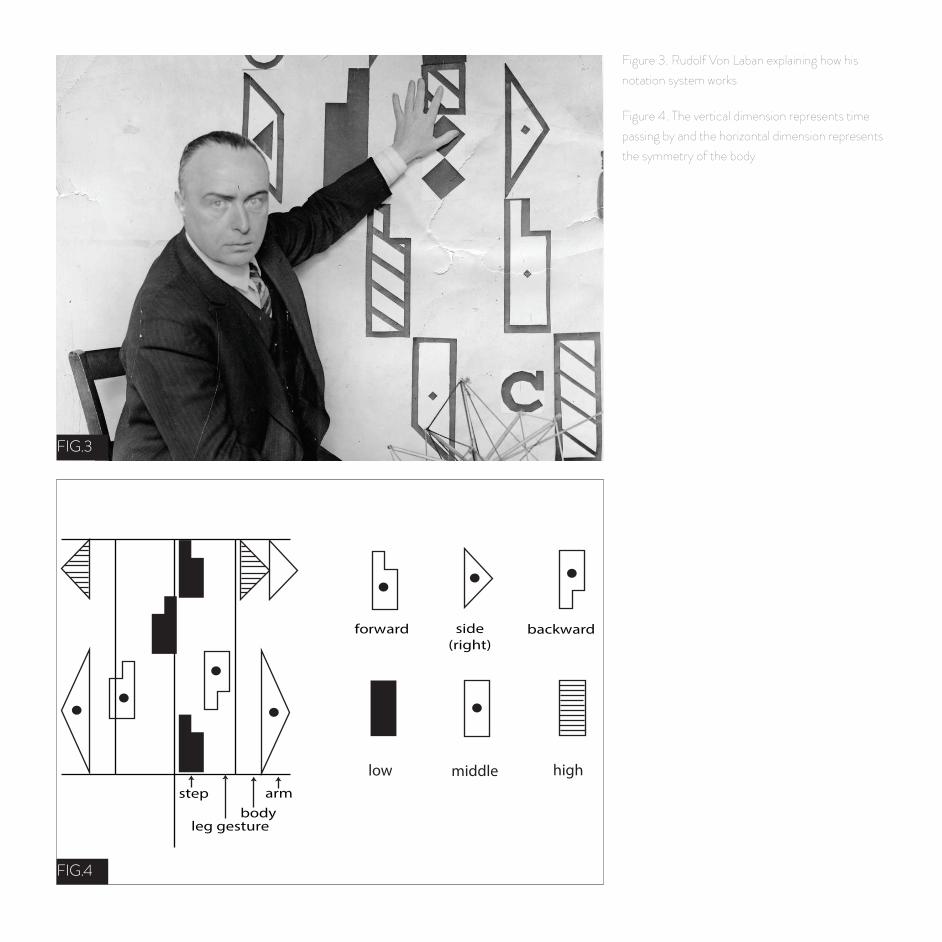
Figure 3. Rudolf Von Laban explaining how his notation system works
Figure 4. The vertical dimension represents time passing by and the horizontal dimension represents the symmetry of the body
stepbody
leg gesture
arm
forward side(right)
backward
low middle high
FIG.3
FIG.4

knowledge” and perception of movement and space. [Goodman, 1968]
[ii] improvisation in dance
According to Merce Cunningham, improvisation in dance is not equivalent to free form. It is instead a refined skill, which allows a performer to choose among his repertoire of movements what best suits the current development of the dance, in coordination with the other performers. He has developed a choreography based on structured improvisation: each dancer needs to “invent” his or her own space as a function of the other performers’ improvisation [Sparacino et al., 2000].
In improvisational dance the performer must generate a constant flow of ideas and models, and constantly surprise himself or herself, as well as the audience. An immediate feedback between the performers can completely change the direction of choreography.
Improvisational structures permit the dancer elements of freedom and creativity in making moves and sequences of movement. The dancer can employ any number of compositional strategies and creative responses to pursue an outcome where the result is not fully known [Ribeiro and Fonsenca,2001]. Improvisation is much more demanding than following a prescribed set of instructions. The improviser must create the artistic product as he or she performs it and they are simultaneously their own choreographers and their partners’ spectators in the relation with the partners and the space
As a dance structure that provides originality and interactivity, many influential choreographers have been interested in the techniques of improvisation and have developed their own creative processes.
[iv] William forsythe
One of the contemporary choreographers using improvisation techniques is William Forsythe. Forsythe’s works have often promoted dance choreography and dance performance as resources for the study of human perception
“improvisation technologies”
In over 100 video segments, Forsythe explains the key principles of his vocabulary offering a perspective on his approach to improvisation.
Forsythe analyses basic classical dance movements into geometrical shapes and forms such as points, planes, volumes, lines. Using those shapes he composes choreographies by rotating, extruding, folding, unfolding. He creates his own vocabulary, called “U-lines” . These may consist of short phrases to interpret (e.g. I’m not talking to you, You meet yourself, Cheers you up, To spite you), mathematical terms (e.g. divides, delineates, functions, planes), verbs and adjectives (e.g. deviate, follow, reject, implode, partial), and computational operations (e.g. distortion operations, recursive algorithms) [Spier 2005]. He evolves classical ballet terms into new fragmented, distorted set of rules for improvisation methods. [Spier, 2005]
In order to teach his principles and ideas Forsythe developed his own notating system called ‘Improvisation Technologies’. With his body as the interface for drawing lines, curves and volumes in space, he explains his process through recorded educational video segments. This vocabulary then used by dancers as a language of communication on stage, as a set of scores that trigger next move of every dancer.
[v] Wayne mcgregor
Another contemporary choreographer who uses improvisation techniques is Wayne McGregor, known for testing choreography and collaborations across dance, film, music, visual art, technology and science. Using improvisation tasks as a fundamental technique of his creative process, he gives his dancers “scores” or “problems” to solve as a way of generating movement sequences. These tasks involve a degree of complex mental work, for example visualizing shapes in space. This is enough to stimulate a focused conversation about how mind, space and body interact.
Weekend lab at barbican centre (2013)
During this research a two-day seminar organized by Wayne McGregor and his dance company Random dance at Barbican Centre was attended by the author. Continuing his effort to expand creative thinking in choreography using improvisation techniques, McGregor led the participants in a series of creative tasks that exposed the processes used by him in the creation of his recent work FAR. Always following the basic rule of decomposition of the human body and creation of un-natural, fragmented forms and movements, McGregor provided his dancers with a series of tasks in order for them to create their own “solos”.

Figure 5. Forsythe’s vocabulary of movement
FIG.5

10 certain moves of the choreography were picked, and then choreographic devices (repetition, mirror, canons, contrasts) and other spatial elements (change speed, direction, levels) added to those moves. As the process went on, imaginary 2d objects were visualized (circle, rectangle, lines etc.) which have attributes such as color, shape ,texture, sound (in contrary to Forsythe who uses mostly geometrical terms) and mechanical gestures (break, twist, collapse, taste, measure). Every dancer memorized each other’s routines (with the same rules but in a personal way), and contact moments added into the choreography. Through this feedback system with other dancers’ routines, the dancers adapted themselves and combined individual routine into a new collaborative routine. As layers of gestures were added, interaction started to immerse not only with the choreographer’s instructions but also with other dancers.
Layers of different scores were built upon to previous layers in order to let the performers to operate a personal but increased complexity movement. This is not dissimilar to Brooks control systems where a flexible robot wanders around an office. High level layers subsume the scores of the lower levels; but lower levels continue to function as higher levels are added.[Brooks, 1985]
Using the analogy of Brooks graphic analysis, it can be argued that planned choreography is described as functional steps illustrated by a series of vertical slices. where movements come one after another as a successive sequence; while unplanned choreography can be illustrated by a series of an horizontal slices, where every lower level continue to function as higher complex levels are added [Brooks, 1985]. This can function as the explanatory vocabulary of rules that describe the complexity of movements in structured improvisation of Wayne McGregor. An attempt of
this horizontal staff of rules is going to be used for the final experiment in the next chapter.
Figure 6: Analogy of Brooks’ control system of added layers
3. bridging dance choreography and kinetic design
using softWare as a bridge betWeen dance movement and architecture
In every type of choreography from strict planned ballet to the open forms of contemporary improvisation, an array of rules, terms, vocabularies, techniques and notation systems are found. The evolution of choreographic techniques is occurring in accordance to the terminology and the tools (choreographic and representative) that are being used by choreographers.
It needs to be noted that for the earlier methods of choreography the choreographers use pre – existed notation systems (e.g. labanotation). This type of notation systems facilitates the entry, storage and retrieval of dance notation scores.
They have basically been used to archive, preserve or document notation scores of dance in order to provide a record [Schiphorst 1993].
When increasing complexity emerges, choreographers usually develop novel notation systems that reflect their creative needs and rules. These notation systems are designed for composition and choreography. These latter systems differ from the entry and interpretation of dance notation as the compositional process and its use affects the outcome of the dance. They are designed to assist the choreographer in visualizing and experimenting with movement during the creative process [Schiphorst 1993].
This is the evolution of a simple notation system into an interactive creative software that not only notates and maps human movement but also becomes an active participant in the creative exchange between choreographer and dancer.
For the purposes of the design project that accompanies the thesis a series of experiments have been conducted in order to present basic kinetic design systems as a gradient from automaton to reactive and interactive/improvisational systems as a an analogy to planned, semi planned and unplanned choreography. Simple notation systems has been created as an immediate visualisation of the reaction between the physical objects and a performer.

Figures 7,8. Participation in Wayne McGregor’s Weekend Lab
FIG.8
FIG.7
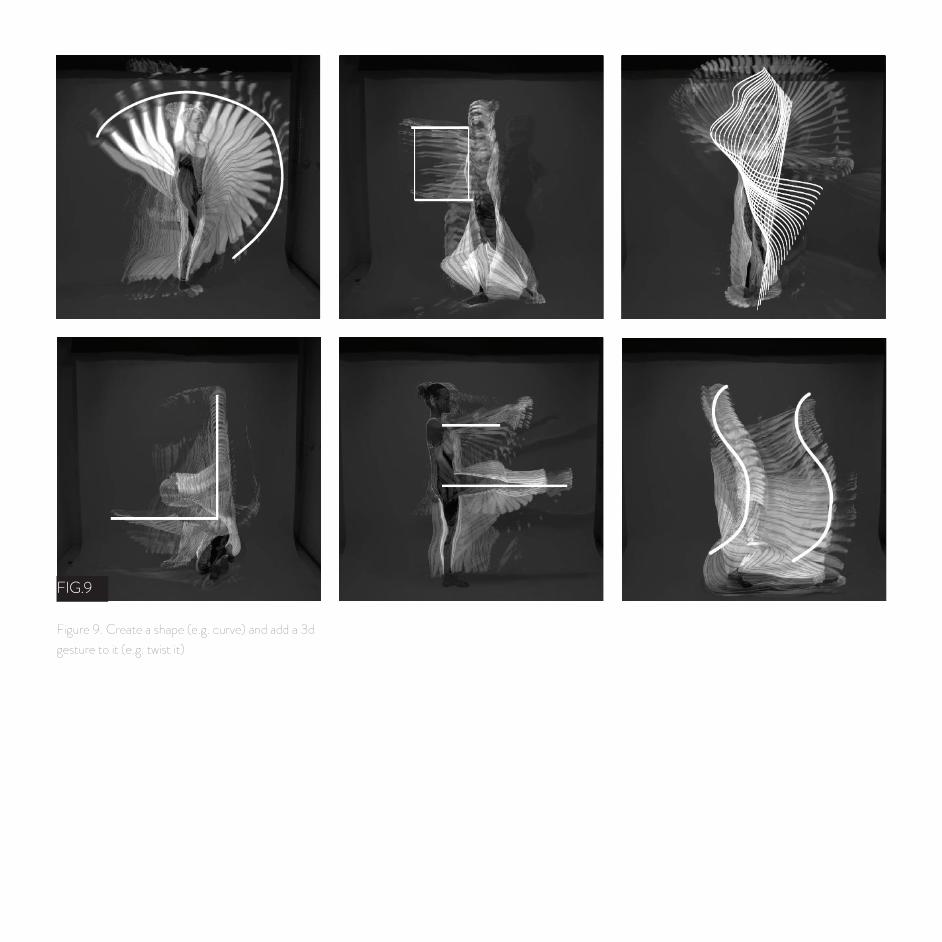
Figure 9. Create a shape (e.g. curve) and add a 3d gesture to it (e.g. twist it)
FIG.9
4. kinetic design
design projects/combination of a machine and a dancing theory
4.01. automaton / planned choreography
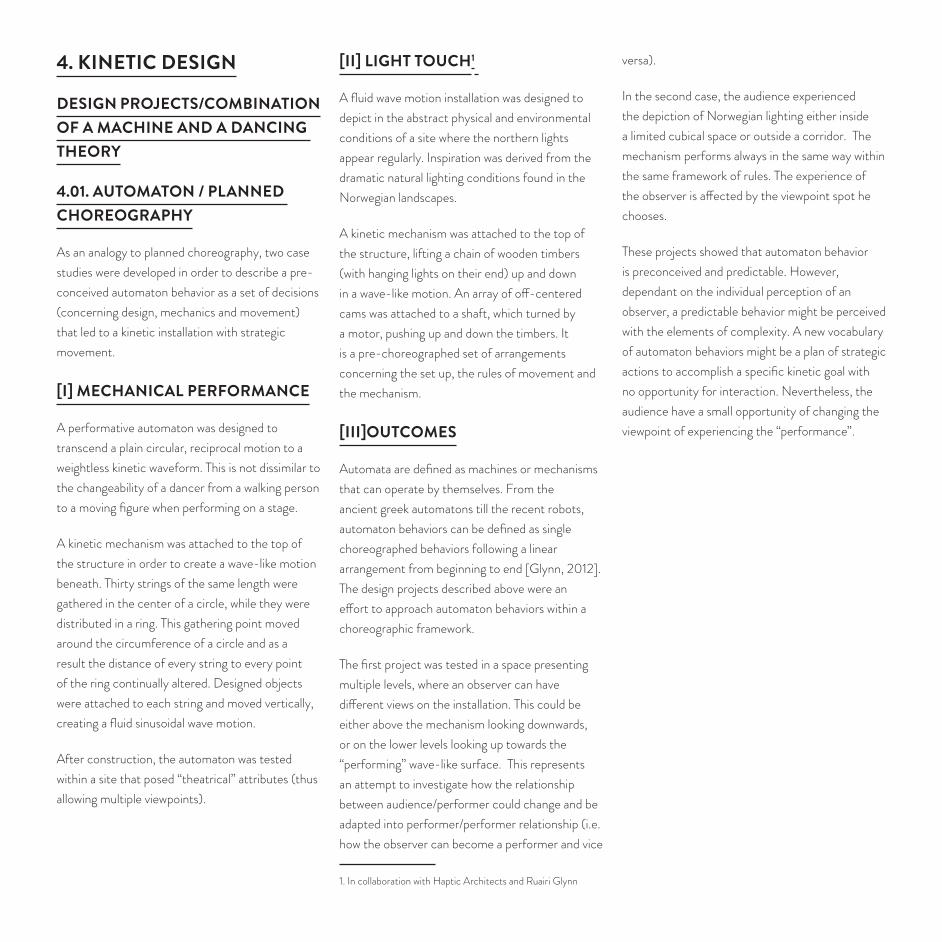
As an analogy to planned choreography, two case studies were developed in order to describe a pre-conceived automaton behavior as a set of decisions (concerning design, mechanics and movement) that led to a kinetic installation with strategic movement.
[i] mechanical performance
A performative automaton was designed to transcend a plain circular, reciprocal motion to a weightless kinetic waveform. This is not dissimilar to the changeability of a dancer from a walking person to a moving figure when performing on a stage.
A kinetic mechanism was attached to the top of the structure in order to create a wave-like motion beneath. Thirty strings of the same length were gathered in the center of a circle, while they were distributed in a ring. This gathering point moved around the circumference of a circle and as a result the distance of every string to every point of the ring continually altered. Designed objects were attached to each string and moved vertically, creating a fluid sinusoidal wave motion.
After construction, the automaton was tested within a site that posed “theatrical” attributes (thus allowing multiple viewpoints).
[ii] light touch1
A fluid wave motion installation was designed to depict in the abstract physical and environmental conditions of a site where the northern lights appear regularly. Inspiration was derived from the dramatic natural lighting conditions found in the Norwegian landscapes.
A kinetic mechanism was attached to the top of the structure, lifting a chain of wooden timbers (with hanging lights on their end) up and down in a wave-like motion. An array of off-centered cams was attached to a shaft, which turned by a motor, pushing up and down the timbers. It is a pre-choreographed set of arrangements concerning the set up, the rules of movement and the mechanism.
[iii]outcomes
Automata are defined as machines or mechanisms that can operate by themselves. From the ancient greek automatons till the recent robots, automaton behaviors can be defined as single choreographed behaviors following a linear arrangement from beginning to end [Glynn, 2012]. The design projects described above were an effort to approach automaton behaviors within a choreographic framework.
The first project was tested in a space presenting multiple levels, where an observer can have different views on the installation. This could be either above the mechanism looking downwards, or on the lower levels looking up towards the “performing” wave-like surface. This represents an attempt to investigate how the relationship between audience/performer could change and be adapted into performer/performer relationship (i.e. how the observer can become a performer and vice
1. In collaboration with Haptic Architects and Ruairi Glynn
versa).
In the second case, the audience experienced the depiction of Norwegian lighting either inside a limited cubical space or outside a corridor. The mechanism performs always in the same way within the same framework of rules. The experience of the observer is affected by the viewpoint spot he chooses.
These projects showed that automaton behavior is preconceived and predictable. However, dependant on the individual perception of an observer, a predictable behavior might be perceived with the elements of complexity. A new vocabulary of automaton behaviors might be a plan of strategic actions to accomplish a specific kinetic goal with no opportunity for interaction. Nevertheless, the audience have a small opportunity of changing the viewpoint of experiencing the “performance”.
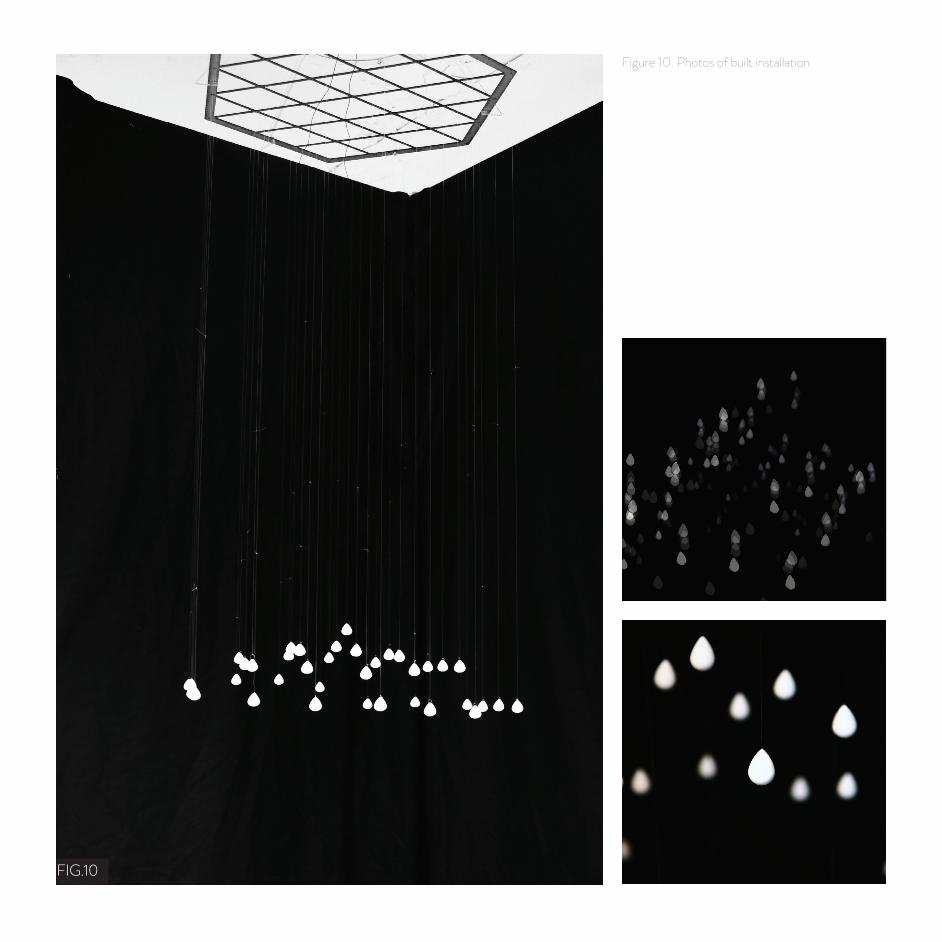
Figure 10. Photos of built installation
FIG.10

Figure 11. Render and exploded drawing of the mechanism of Light Touch project.
FIG.11
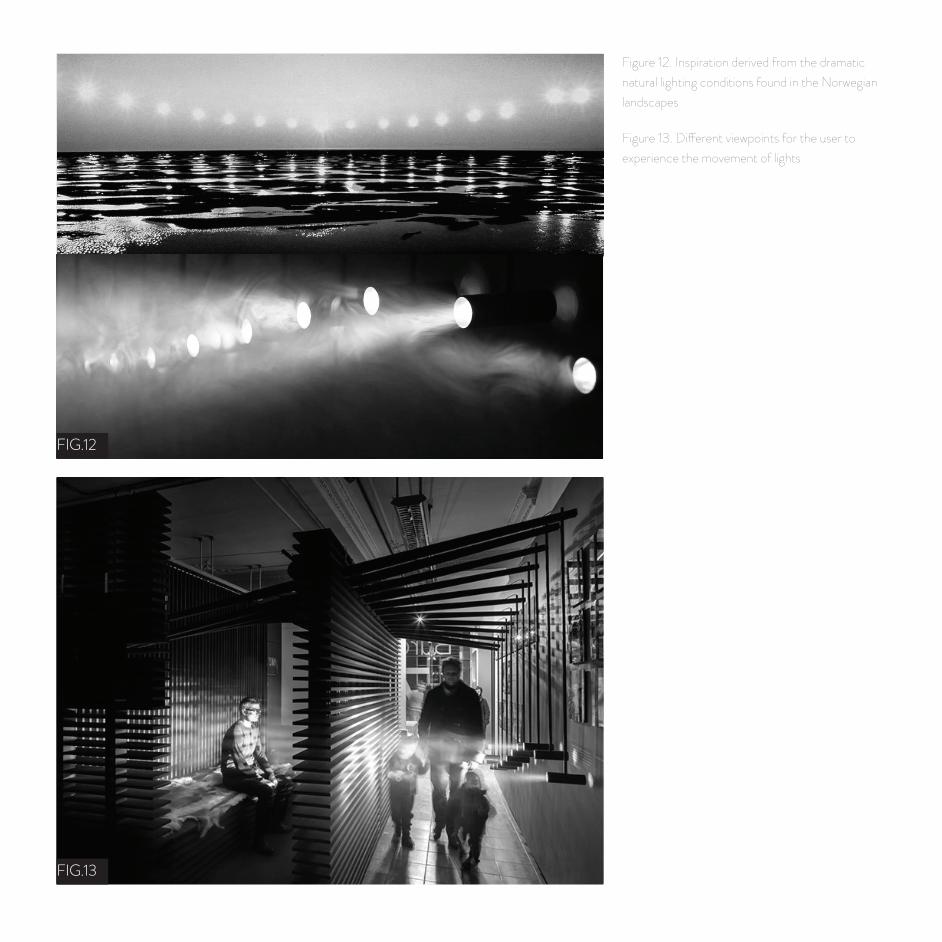
Figure 12. Inspiration derived from the dramatic natural lighting conditions found in the Norwegian landscapes
Figure 13. Different viewpoints for the user to experience the movement of lights
FIG.12
FIG.13

4.02. reactive systems/semi-planned choreography
[i] choreographic devices
William Forsythe developed choreographic digital objects to depict and notate his choreographic processes. As a first attempt for creating a similar open source software, the design of a third case study started with the simplest possible movement, one that can be performed by a robot: a one-degree-of-freedom movement in the shoulder. An arm is moved up and down according to a series of choreographic terms, trying to depict choreographic devices into a reactive system, triggered by a dancer.
A Kinect camera combined with the design software of Grasshopper in Rhino and a timeline were used to catch the human movement and make 3 cylinders (“performers”) turn accordingly. The result is a physical representation of the movement which changes according to the software. The software creates 3 types of choreographic devices: unison, canon and mirror. The cylinders triggered by the human body are performing differently in every case, according to the device the software is using.
[ii]outcomes
A reactive system is characterised by multiple choreographed behaviors following non-linear arrangements, triggered by stimuli [Glynn, 2012]. As an analogy to contemporary dance, dancers’ movements are triggered by stimuli (or else scores) that a choreographer provides. They have the opportunity to be differentiated from a linear choreography and be able to choose from a list of “devices” that a choreographer provides. A small opportunity of personal interpretation is provided
not only for the “performer” but also for the observer. The observer starts to share the “stage” with the performer and the hierarchy between audience and performer begins to blur.
This change of perception of the space from the point of view of the observer can be analogous to the previous gradient of choreography. In planned choreography (e.g. ballet performances) the audience watches the performance from a dark, seated spot in a theatre without having the opportunity to be integrated into the stage (figure 24). Moving on to contemporary art and dance, the stage becomes a open, round space, an unseated, abstract room which can adapt according to the performance. The audience is free to move around the space or the performer and become part of the performance (figure 25).
4.04. interactive systems/unplanned choreography (improvisation)
[i]final design project
Using ideas taken from William Forsythe’s and Wayne McGregor’s work on structured improvisation, a combination of pre-choreographed and improvised performances will be designed as a gestural dialog between a dancer and two Universal Robot Arms. The result will be an emerging set of movements that conclude to an unpredictable choreography for every performance.
Using Laban’s description of movement the project is divided in 4 parts of movement research: body, time, space and dynamics. The human body and the way it moves is reciprocated in the movement of the robots as different parts of a dancer’s anatomy will trigger differing movements. Time
is introduced to the performance with a real time dialog between dancer and robots affecting the synchronization and the speed of movement (using the technology of body tracking with a Kinect camera and computer vision).
In terms of dynamics, different gestures and shapes based on McGregor improvisation process cause various qualities of the movement (e.g. A geometrical form (L-shape) and a 3d gesture (twist)). The space occupied by the performers is depicted by an end effector for the performer and the robots respectively. Big fans performing as spatial modulators are complementary to each other. As they perform attached to the robots, they create unpredictable spatial qualities with the dancer and the stage.
The installation is a proposal of a stage set. The “performers” (i.e. dancer, robot arms) give and receive visual scores to and from each other. A score is an indication that one or more dancers can initiate a specified movement phrase. Effectively, as the improvisers perform they continuously change their role as being simultaneously their own choreographers and their partners’ audience.
[ii] future development
In order to expand the ideas of improvisation to the wider spectrum of spatial interactivity in a public space, the project is intended to be installed in an exhibition space. The installation will explore the different behaviours between performers and observers. The gestural dialog between machine and human will be directly relatable to the degree of expertise of movement the observer has.
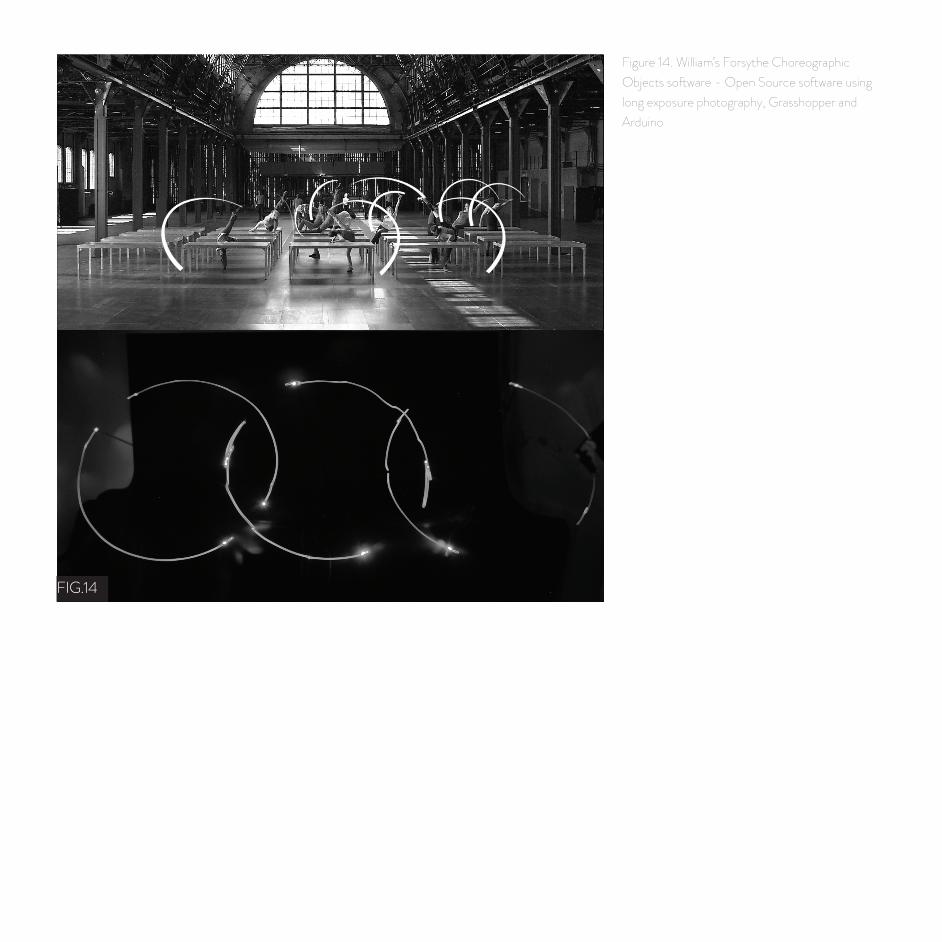
Figure 14. William’s Forsythe Choreographic Objects software - Open Source software using long exposure photography, Grasshopper and Arduino
FIG.14
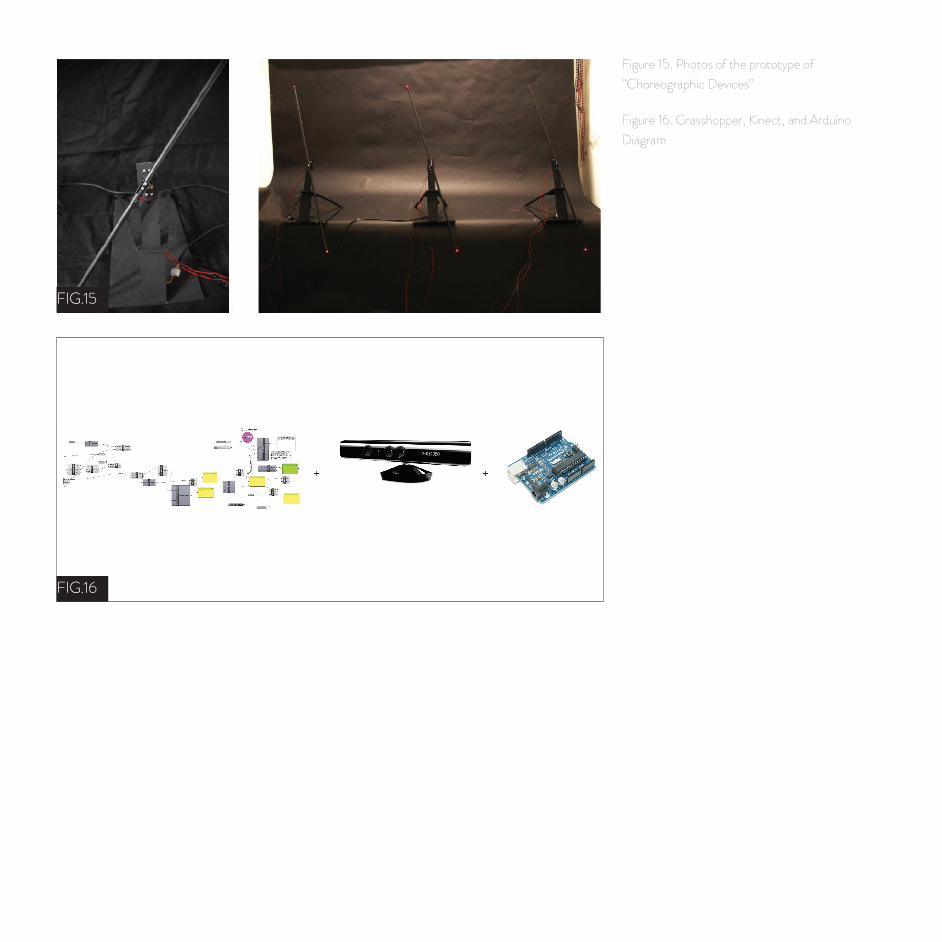
Figure 15. Photos of the prototype of “Choreographic Devices”
Figure 16. Grasshopper, Kinect, and Arduino Diagram
FIG.15
FIG.16
5. conclusions
Reviewing the three objectives set out in the introduction, some conclusions can be drawn.
1. The choreographic objective:
An observation about the gradient of choreography has been discussed. Choreography is characterised as the organisation of the heterogeneous materials of movement, bodies, language, narratives, images, light, space, and objects [Siegmund, 2012].Within this context, the participation and personal interpretation of the performer and the audience needs to be considered. In restricted, pre-planned performances (such as ballet) these elements follow linear arrangements of rules with diminishing opportunities for the audience, the performer or even the space to adapt. Contemporary performances based on improvisational techniques afford ample participation in the decisions of the choreographic routine. This applies to the performers, the audience and the space; all of which are able to adapt, perform and thus participate. In both cases, elements of freedom and restriction blur the limits of these gradients.
2. The design objective:
In the constructed kinetic installations, automaton systems were observed to be following a linear arrangement of rules but are able to add a small element of unpredictability in the behavior of the audience. Conversely, interactive design offers emergent, unpredictable behaviors by following a set of rules. The difference between the two is that while the automaton systems exhibit a linear arrangement, the latter exhibits rules which are constantly evolving according to the audience, the designer or the space. This clearly parallels the hypothesized blurred choreographic gradient.
3. The shared objective:
As discussed in the introduction, the aim of the shared objective was principally to seek connections between choreographic processes and kinetic design. Upon investigation, it can be argued that kinetic design can embody complexity derived from improvisation techniques. The vehicle for this embodiment is a design vocabulary built as added layers of increased complexity, based on structured improvisation and Laban’s movement description.
This vocabulary contains 4 parts of Laban’s movement research (body, time, space, dynamics). These elements were chosen as a novel way to describe choreographed movement in relation to robotics. The research has highlighted that after several experiments, the translation of choreographic terms into terms understandable in the field of robotics is vast.
As opposed to literal robotic mimicry, a decomposition of the human anatomy was used, with different parts of the body being adopted by the robots at any time. Using the process of Wayne McGregor to create un-natural, fragmented forms and movements, time and dynamics were added to the investigation of movement. Space and its changes during the choreography has been depicted in the form of two large spatial modulators. Finally, the gestural dialog has been implemented with the use of computer vision and adaptive computation technology.
further research
This thesis is part of research on how a designer can achieve spatial interactivity between performers, observers, technology and a space; using the proposed vocabulary to set up a scenery for a performance or an exhibition space.
Looking at the wider spectrum of architecture, this vocabulary can adapt and expand in order to
choreograph and control heterogeneous materials that include movement. It might propose a further synchronisation of a repertoire of functions/movements/responses in an environment which is in conversation with its occupants. A training system in a space used by people might be choreographed by the aid of an expanded version of the bespoken vocabulary. Improvisation might offer complexity in interactivity as a form of elements that could not be found in a systematic preconceived process. This research contributes some way towards generating renewed and significant relationships between the space and its habitats.

Figure 17. First experiments with UR10s. Dancer and Robot performing an L-shape path.
FIG.17
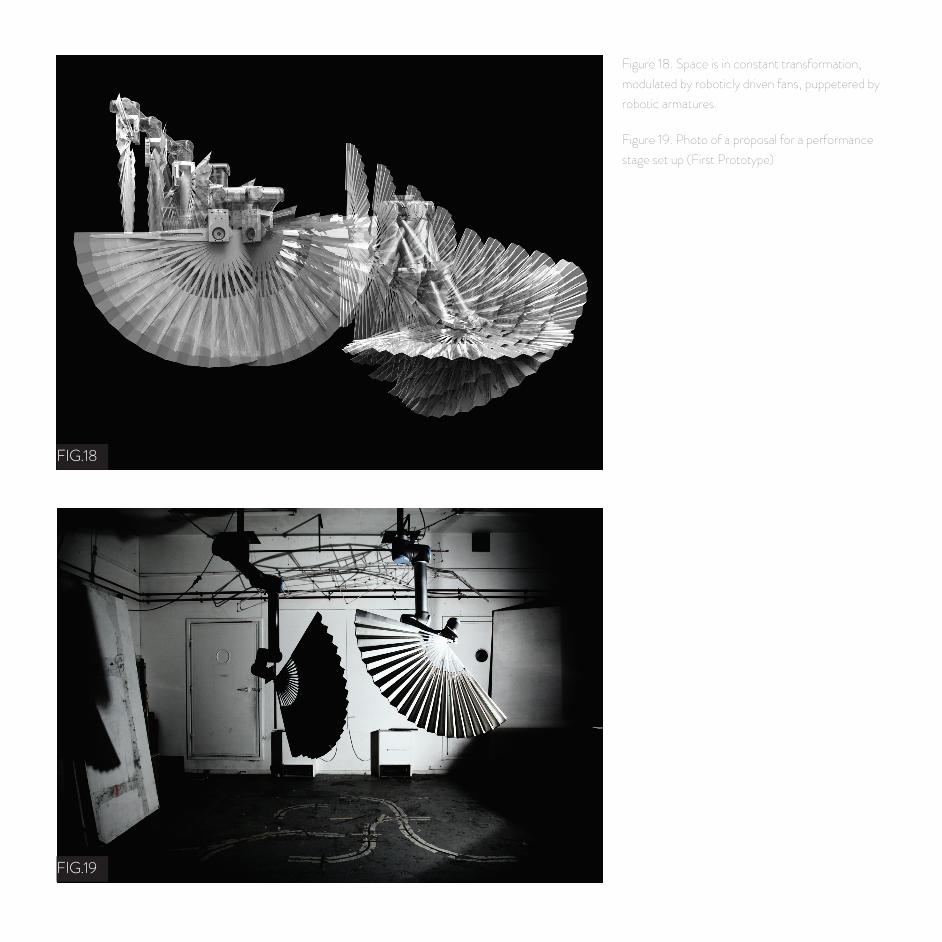
Figure 18. Space is in constant transformation, modulated by roboticly driven fans, puppetered by robotic armatures.
Figure 19. Photo of a proposal for a performance stage set up (First Prototype)
FIG.18
FIG.19
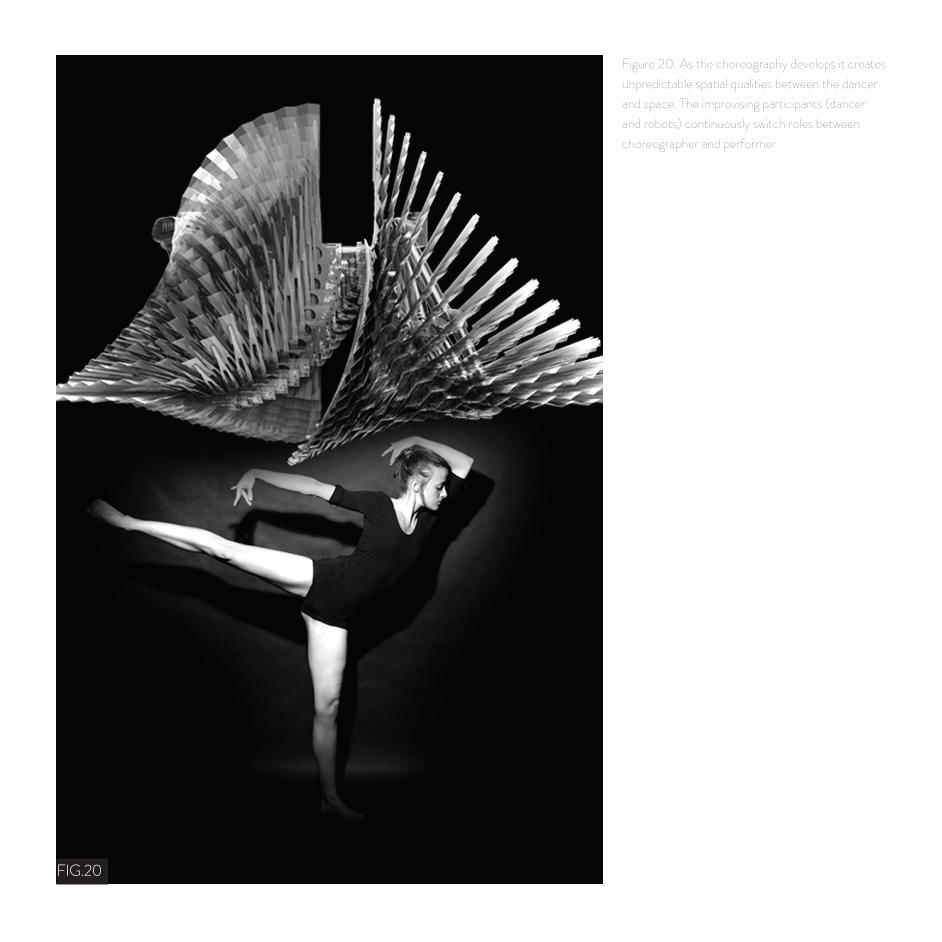
Figure 20. As the choreography develops it creates unpredictable spatial qualities between the dancer and space. The improvising participants (dancer and robots) continuously switch roles between choreographer and performer
FIG.20
references
Brooks, R (1985), A robust layered control system for a mobile robot, Thesis, Massachusetts Institute of Technology
Ellfeldt, L. (1998) A Primer for Choreographers . Waveland Press
Carter, L.C. (2000). Improvisation in Dance, The Journal of Aesthetics and Art Criticism, 58 (2), 181-190
Copeland, R (2004). Cunningham: The Modernizing of Modern Dance, New York and London: The MIT Press, p. 180-182
Cunningham, M.(1980), “From Notation to Video” The Dancer and the Dance, Marion Boyers Inc., pp. 188-189
Gavrilou, E (2003). Inscribing structures of dance into architecture, National Technical University of Athens, Greece
Glynn, R (2012). Research Cluster 3, Motive Mythologies brief, http://www.bartlett.ucl.ac.uk/architecture/programmes/postgraduate/units-and-showcases/march-architectural-design/cluster3/2012-2013. Last accessed 26th April 2013.
Grand, G (1982). Technical Manual and Dictionary of Classical Ballet. Dover Publications
Goodman, N (1968). Languages of art. An approach to a theory of symbols. The Bobbs-Merrill Company,Inc.
Hansen L.A. (2011). Full-body movement as material for interaction design, Digital Creativity, 22(4), 247-262
Hill, J (2001). Architecture: The subject is matter,
New York: Routledge
Hutchinson, A (1989). Choreographics: A comparison of dance notation systems from the 15th centrury to the present. Amsterdam: Gordon and Breach Publishers
Hutchinson, A. (1991).Labanotation: the system of analyzing and recording movement. Great Britain: Routledge
McGregor, W. deLahunta, S. Barnard, P. (upcoming 2009). Augmenting Choreography: using insights from Cognitive Science, In J. Butterworth & L. Wildschut (Eds.), Routledge Reader in Contemporary Choreography. London: Routledge
Pask, G (1971). A Comment, A Case History & A Plan, in Reichardt J (ed.), Cybernetics, Art & Ideas, London: Studio Vista
Ribeiro, M & Fonseca, A (2011). The empathy and the structuring sharing modes of movement sequences in the improvisation of contemporary dance, Research in Dance Education, 12 (2), 71-85
Schiphorst, T (1993). A case study of Merce Cunningham’s use of the Lifeforms Computer choreographic system in the making of Trackers. Thesis (Ph.D.), Simon Fraser University
Siegmund,G. (2012). What is choreography?. Available: http://www.corpusweb.net/tongue-7.html. Last accessed 17th May 2013.
Smith - Autard, J. (2010). Dance Composition: A practical guide to creative success in dance making, London: Metheun Drama
Sparacino, F. Wren, C. Davenport,G. Pentland, A. (2000) Augmented Performance in Dance and Theater, MIT Media Lab
Spier, S (2005): Dancing and drawing, choreography and architecture, The Journal of Architecture, 10 (4), 349-364
Spier, S (2010). William Forsythe and the Practice of Choreography. Routledge
Stathopoulou, D (2011). From Dance Movement to Architectural Form, Thesis, University of Bath, Department of Architecture and Civil Engineering
seminars, lectures, performances, videos
Seminar: McGregor, W. Weekend Dance Workshop with Random Dance Company, Rain Room, Barbican Centre, February 2013
Videos: Forsythe, William. Improvisation Technologies: A Tool for the Analytical Dance Eye (CD-ROM). Ostfildern, DE: Hatje Cantz Verlag, June 2000
Symposium: Mulvey, M. What does performance have to do with architecture? How can a building perform, and how can we perform a building. Tate Britain, London, February 2013
Performance: Mortal Engine, Chunky Move, Southbank Center, London, October 2012
Performance: Infra, Wayne McGregor, Royal Opera House, London, November 2012
Performance: FAR, Wayne McGregor, Royal Opera House, London, November 2012
Performance: Don Quixote, Mikhailovsky Ballet, English National Opera, March 2013
Performance: The architects, Shunt at the Biscuit Factory, London, January 2013
Performance: Savanna, A Possible Landscape,
Amit Drori, Barbican Centre, London, January 2013
Performance: Rhinoceros, Theatre de la Ville, Barbican Centre, London, January 2013
Symposium: “Choreographing the..” Organised and hosted by Takako Hasegawa, Speakers: Olafur Eliasson, Gilles Jobin, Marie-Claude Paulin & Emma E Howes, La Ribot, Sidi Larbi Cherkaoui, Siobhan Davies, at Architectural Associasion, April 2013
Lectures: The Bartlett Research Exchanges: Performance/Performativity,Speakers: Camillo Boano (DPU), Matthew Butcher (School of Architecture), Ava Fatah (BSGS), Ruairi Glynn (BSGS), Sean Hanna (BSGS) , Andy Hudson-Smith (CASA), Yeoryia Manolopoulou (School of Architecture), Dejan Mumovich (BSGS), Alex Murray (C&PM), James O’Leary (School of Architecture), Tadj Oreszczyn (UCL Energy Institute), Satu Teerikangas (C&PM), Filipa Wunderlich (School of Planning), at the Bartlett School of Architecture, March 2013
Conference: National Choreographer’s Conference (Choreography and Collaboration) 2013, organised by Angela Towler, at Sadler’s Wells
sources for illustrations
Figure 1. Varna, C. (2013)
Figure 2. www.arcspace.com Retrieved on February 2013
Figure 3. www.tanzarchiv-leipzig.de Retrieved on February 2013
Figure 4. http://www.britannica.com/EBchecked/topic/150794/dance-notation/252588/Twentieth-century-developments Retrieved on
February 2013
Figure 5. http://justinmorrison.net/video/william-forsythe-improvisation-technologies/
Figure 6. Varna, C. (2013)
Figure 7. Nolan, S., Weekend Lab in Barbican, February 2013
Figure 8. Nolan, S., Weekend Lab in Barbican, February 2013
Figure 9. Varna, C. (2013)
Figure 10. Varna, C. (2013)
Figure 11. Varna, C. (2013)
Figure 12. Haptic Architects (2013)
Figure 13. Haptic Architects (2013)
Figure 14. Varna, C. (2013)
Figure 15. Varna, C. (2013)
Figure 16. Varna, C. (2013)
Figure 17. Varna, C. (2013)
Figure 18. Varna, C. (2013)
Figure 19. Varna, C. (2013)
Figure 20. Varna, C. (2013)