i 小型 トラックam丁システム
TRANSCRIPT

通 称 名 車 両 型 式 適 用 時 期 出 典 資 料
日野デュ トロSJG付
XKU, XKC2011,7-
新型車解説書 Dl1010 1/2整備解説書 Hl1030 3/5
I 小型 トラックAM丁 システム
1概 要
小型 トラックAMT(オートメイディッド0マ ニュアル・ トランスミッション)シ ステムは,マニュアル・ ト
ランスミッションとクラッチを電子制御で操作し, 自動発進自動変速を行っているHV(ハ イブリッド車)専
用のオートマテイック・ トランスミッションである。クラッチとトランスミッションの操作が自動制御とな
るため,運転者の疲労低減と安全性の向上を図ることができ,常に適切なタイミングで変速が可能となり,
運転者による燃費バラツキを低減すると共にハイブリッド・システムによるアシストが加わる事で,燃費の
向上と排出ガスの低減を可能にし,高い経済性を実現させている。
2 構造・機能
AMTの構成は,ク ラッチ 0ス トロークや トランスミッション出力軸回転数などを検知する各センサ類,運
転者からの指示を検知するセレクト・レバー, 自動変速を行うモータ式シフト・セレクト・ユニット,ク
ラッチを自動操作するACU(オ ート・クラッチ・ユニット), シフト0セ レクト・ユニットとACUに電力
供給を行うモータ・ドライバ,そ してシステム全体を制御するAMT・ ECUから成り,マニュアル用の5段
トランスミッション(M550)に組み合っている。
ハイブリッド・モータは,車両の発進,加速,走行時にトルクをアシストし,減速時に車両の運動エネルギ
を電気エネルギに変換して回生する。このモータはクラッチの後方,ト ランスミッションの前に取り付く構
造になっているため,ク ラッチが切れた状態でモータのみの走行も可能となる。
発進時のモータ 0ア シストは,バ ッテリ残量,バ ッテリ温度,勾配に応じて自動制御される。
AMT・ ECUは各ECU(HV・ ECU,エ ンジンECU,車両制御ECU,ABS・ ECU, メータECU)間 をCAN通信している。
- 94 -
日 野 自 動 車 株 式 会 社

1)シ ステム図
(1)系統図 (図 I-1)
AMT個別で持っている回転センサは,ア ウトプット回転センサのみである。
運転者の操作を検出するものには,セ レクト・レバー・ユニット,ス トップ・ランプ・スイッチ,パーキン
グ・ブレーキ・スイッチなどがある。
ス トップ 。ランプ・スイッチは,車両が停止し発進ギヤ段に自動操作される時,ブレーキを踏んでいる事の
判断をしている。
―
電気の流れ ――――オイルの流れ ――……通信 (CAN)
アクセサリ電源
ヽ ′
図 I-1 系統図
ハーロ上ヽ
日
・ヽヽ口
。上ヽ
′、
―くヽ
。上ヽゝ
ホ、ヽK
・キーゝ卜
・ヽハキーく
ハい
・卜、上К
出回掘目ヽ―中
・ムヽゝ型
ヽヘギ
。ヽ―ロニК
・ムヽゝギ
ヽハツ
・ヽ―
ロエκ
・上ヽ
,、
シフト・ロック・
コントローラ
わへ羽
・ヽ―
ロニκ
・ホ
、いヽ
ホ
、ヽKO卜L
ホ、ヽK
・λm
′、ヽ千O卜L
ヽへ翠輝回上、ヽ
二い区
かヽ早
・ヽ―
ロエκ⊃0く
出回督目ヽ―中
。上ヽ
′、
1 1 1 0 1 1 1 1 1 1 00000 1 1 1 1 1 0AMT・ EC∪
エンジンECU
- 95 -
トランスミッション
ヽ―中
。一、
いヽ
ヽく
丁/M出力軸回転センサ
AMT・ ECU
ストップ 。ランプ・スイッチ
クラッチ・ストローク・センサパーキング・プレーキ・スイッチ
モータ・シフト・ユニット(MSU)
PTO作動スイッチシフト・センサ1,2
セレクト・センサ1,2
PTO操作スイッチシフト・モータ
DLCコ ネクタセレクト・モータ
モータ・ドライバシフト・ロック・コントローラ
オート・クラッチ・ユニット(ACU)
アクセサ リ電源ACUモータ1,2
ACUス トローク・センサ1,2
バッテリ電源
エンジンECUハイラオリッドECUAMTセ レクト・レノヽ一
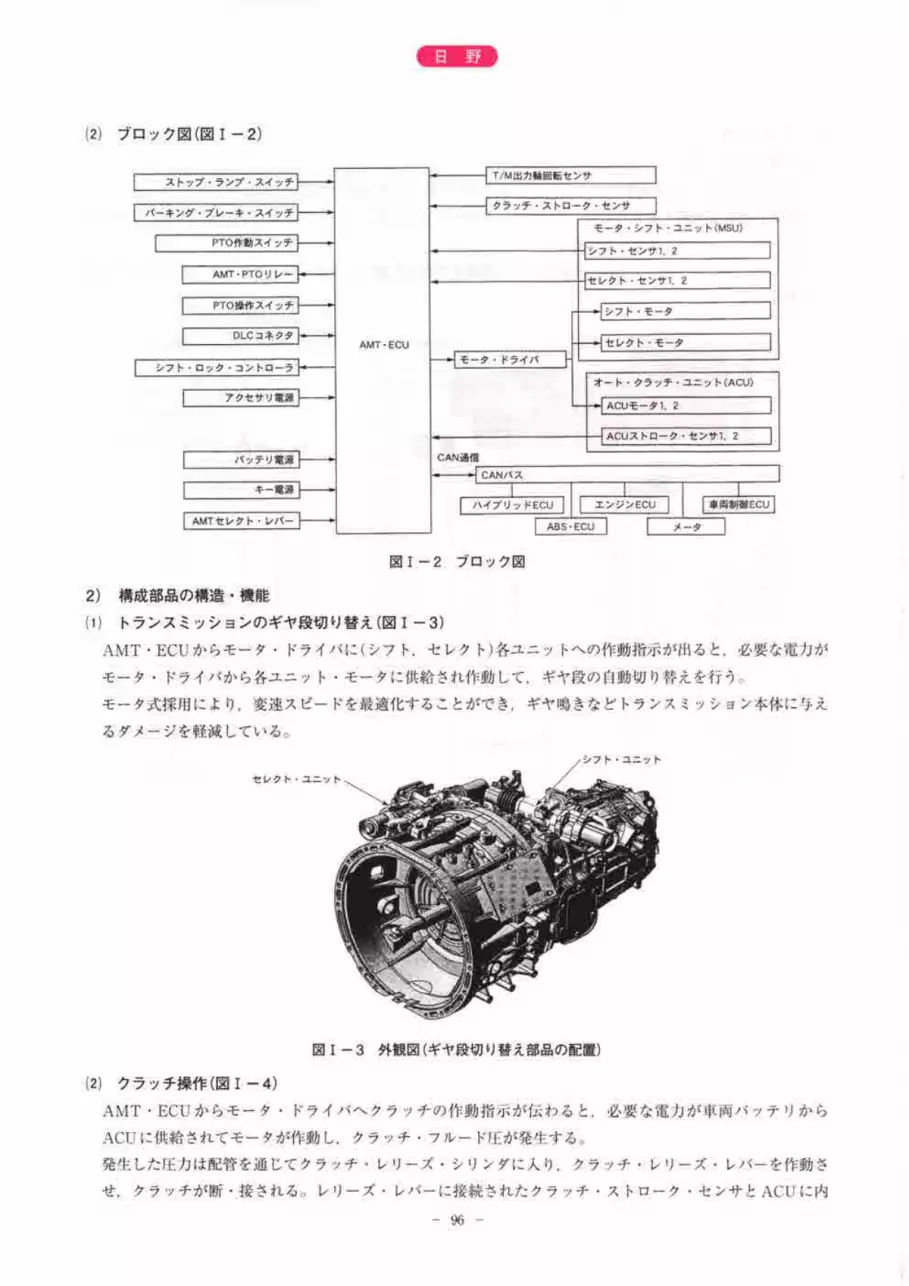
(2)ブロック図(図 I-2)
図I-2 ブロック図
2)構成部品の構造・機能
(1)ト ランスミッションのギヤ段切り替え(図 I-3)
AMT・ ECUからモータ・ ドライバに(シ フト,セ レクト)各ユニットヘの作動指示が出ると,必要な電力が
モータ 0ド ライバから各ユニット0モ ータに供給され作動して,ギヤ段の自動切り替えを行う。
モータ式採用により,変速スピードを最適化することができ,ギヤ鳴きなどトランスミッション本体に与え
るダメージを軽減している。
セレクト・ユニッ
図I-3 外観図(ギヤ段切り替え部品の配置)
(2)ク ラッチ操作 (図 I-4)
AMT・ ECUか らモータ・ ドライバヘクラッチの作動指示が伝わると,必要な電力が車両バ ッテリから
ACUに供給されてモータが作動し,ク ラッチ・フルー ド圧が発生する。
発生した圧力は配管を通 じてクラッチ・レリーズ 0シ リンダに入 り,ク ラッチ 0レ リーズ・レバーを作動さ
せ,ク ラッチが断・接される。レリーズ・レバーに接続されたクラッチ・ス トローク・センサとACUに内
- 96 -
シフト・ユニット

蔵されたセンサから得られた情報により
車両バッテリ
AMTOECUが クラッチの断・接状態を制御する。
一 電気の流れ
●●●●|レ クラッチ・フルードの流れ
クラッチ・フルード圧
く卜・ ロロr
クラッチ・レリーズ
AMT・ ECU
ペダル・プラケット
図 I-4 クラッチの作動
(3)AMTeECU(図 I-5)ペダル・ブラケットの左側 (足元)に取 り付けられている。
セレクト・レバー,各センサ及びスイッチなどの情報か
ら状況を判断し,あ らかじめ記憶された変速マップをも
とにシフ ト・ユニット,セ レク ト0ユニット,ACUを制御する。
関係するECU間はCAN通信 している。
FR
LH
ヽ
ACUセ ンサ電圧
- 97 -
図 I-5 AMT・ ECU

(4)モータ 0ドライバ (図 I-6)
リヤ・アーチ左下付近のフレーム横に取 り付けられている。
AMT・ ECUからの信号で,モータ・シフ ト・ユニット(MSU)内のシフト0モ ータとセレクト0モ ータ,
及びオー ト・クラッチ 0ユニット(ACU)内のACUモータ1,2を作動させている。
図 I-6 モータ・ ドライバ
(5)ACU(オ ー ト・クラッチ・ユニット)(図 I-7)
取 り付け位置はモータ・ ドライバ取 り付けBKTの裏側 (車両前方)に取 り付けられ,AMT・ ECUか らの指
示により,ACUモ ータの作動で内蔵するマスタ 0シ リンダからクラッチ・レリーズ・シリンダヘ液圧を伝
達し, レリーズ・レバーを作動させる。
ACUは,2個のACUモ ータとウォーム・ギヤ,ホ イール・ギヤ及びマスタ・シリンダで構成されている。
モータはモータ・ ドライバから供給される電力により駆動され, ウォーム・ギヤ,ホイール・ギヤからプッ
シュ・ロッドに力が掛かリビス トンを押す事で液圧を発生させ,ク ラッチの断・接動作が行われる。
通常モータ1及び2は同時に作動するため,万一どちらかが故障しても機能が失われる事がない。
マスタ・シリンダ
ブッシュ。ロット
クラッチ断方向
クラッチ接方向
ウォーム・ギヤAC∪モータ2
ACUモ ータ1 ホイール・ギヤ
図 I-7 ACU(オ ー ト・クラッチ・ユニット)
吟↑
モータ・ ドライバ
ドライノ`
- 98 -

(6)ACUス トローク・センサ (図 I-8)
ACUス トローク・センサはACUに 内蔵 され,マ スタ・シリンダのビス トン・ス トロークを検出 し,
AMT・ ECUに フィー ドバックしている。
ACUス トローク 0セ ンサはメイン信号 (SSVl)と サブ信号 (SSV2)の 2系統に分かれてお り,万が一片方が
故障した場合はもう一方で制御を行う。
EHffiC7F>0)7 F tr-21(mm)
図 I-8 ACUス トローク・センサ
(7)ク ラッチ・ス トローク・センサ (図 I-9)
クラッチ・リリース・レバーの動きからクラッチ・ス トロークを電気信号に変換 してクラッチの断 0接状態
を検出し,AMT・ ECUへ情報信号 として送る。また,ク ラッチ・フェーシングの摩耗限度位置の検出も
行っている。
ロッド
図 I-9 クラッチ・ス トローク・センサ
ACUス トローク・センサ
ス トローク・セ ンサ電圧
- 99 -

(8)シ フ ト0ユニット(図 I-10)
トランスミッション上面に取 り付けられ,シ フト・モータ(DCモータ)を動力源として作動 し,シ フト方向
の自動変速を行う。
fi-)vttYty l- B-----> ボールねじ軸
ウェア・リング
ストローク・センサ
出カロッド
ナット・ホルダ
センサ・ピン
B一
ボールねじナット
B― B断面図
(9)セ レク ト・ユニット(図 I-11)
トランスミッション側面に取 り付けら
方向の自動変速を行う。
リテーナ・リング
図 I-10 シフ ト・ユニ ッ ト
卜・モータ(DCモータ)を動力源として作動 し,セ レク ト
ボールねじナット
出カロッド 出カレバー
れ,セ レク
セレクト・モータ
ボールねじ軸
リテーナ・リング
ナット・ホルダ
ストローク・センサ
ポールねじナット
ウェア・リング
センサ・ピン
図 I-11 セレク ト・ユニット
10 アウトプット回転センサ (図 I-12)
トランスミッション◆ケースの側面に取り付けられ,ギ
ヤの回転から,プロペラ 0シ ヤフトの回転数を検出する。
センサ・レバー
A― A断面図
- 100 -
図 I-12 アウトプット回転センサ
シフト・モータ

|→ セレクト・レバー・ユニット(図 I-13)
ブラケットを介してフロアに固定され取り付けられている。
操作位置情報は電気信号に変換されAMT・ ECUに伝達され,「 D」 の位置では1~ 5速の切 り替えを,車
速・アクセル開度・負荷に応じて自動的に変速する。
「S」 の位置では走行中のギヤ位置を保持し,「 +」側へ手動で操作してシフト・アップを,反対に「一」側へ操
作してシフト・ダウンに変速する事ができる。
シフト・パターン
図 I-13 セレク ト・ レバー・ユニット
←a PWR/ECOモ ード選択スイッチ(図 I-14)
インパネ部に取り付けられており, この選択スイッチを
操作する事により「通常モード→ECOモード→PWRモード」に切り替える事ができる。
図 I-14 PWR/ECOモ ー ド選択スイッチ
走行モー ドと対応内容
走行モー ド 通常 ECOモ ー ド PWR― モー ド
ランプ表示 表示ランプ点灯せず
ECOモー ド・ランプ点灯 PWRモ ー ド・ランプ点灯
PWRMODE
特徴 燃費と加速をバランス 燃費優先 加速優先
推奨する路線 全般 市街地,住宅街 山岳路,登坂路
変速タイミング 低回転 低回転 高回転
モータ発進 実施
エンジン出力制限※1
無 し あ り 無 し
モー ド記憶※2
あ り あ り 無 し
※
※
エンジンに出力制限をかけ,低燃費走行を補助する機能キー 。オフ時のモードを記憶し,再キー 。オンした時にそのモードを引き継ぐ機能
- 101 -

00 モータ。ジェネレータ(図 I-15)
エンジンとトランスミッションの間に配置されたモータ
兼発電機である。発進,加速時にはエンジンをトルク・
アシストするモータとして,減速時には車両の運動エネ
ルギを電気エネルギに変換するジェネレータ(発電機)及
びリターダ(電気ブレーキ)と して,ま たエンジン始動時
にはスタータ 0モ ータとして機能する。
特にHVバ ッテリが十分な余裕がある場合は,モータ・
ジェネレータのみで発進・走行する。
このモータ・ジェネレータ・ロータとインプット0シ ャ
フトが一体構造のため,イ ナーシヤが大きくなり,ギヤ
を入れる時の回転合わせが困難なため,モータ・ジェネ
レータでインプット回転を合わせる方式をとっている。
HV故障時は,「モータ・ジェネレータ回転の自然降下
モータ・ハウジング
図 I-15 モータ・ジェネレータ
+シ ンクロによる回転合わせ」になるため,通常よリギヤ入 り時間がかか り,走行時は回転合わせができな
いため変速不能となる。
14 PCU(パワー 0コ ントロール 。ユニット)(図 I-16)
車両左側サイド・フレームのホイール・ベース間に取 り付けられ,イ ンバータ,HVバ ッテリ,ECU一
BOXを ワンパッケージ化したユニットである。
上段にはHVバ ッテリと,その冷却装置,下段にはECU― BOX,イ ンバータ,DC― DCコ ンバータ及びそ
れらの冷却装置を配列している。
HVノ ッ`テリ
ECU― BOX・HV― ECU・信号系
インバータ
図 I-16 PCU(パ ワー・コン トロール・ユニット)
颯メ匈 赫
モータ。ジェネレータ
インプット・
シャフト
DC―DCコ ンノ`―タ
ウォータ・ポンプ
- 102 -

←O HVノ ッ`テリ(図 I-17)
PCUの上段に搭載しており,定格電圧288V(7.2V× 40モ ジュール)のニッケル水素バッテリを使用し,冷
却は空冷方式を採用している。
角形バッテリ。モジュール
(1.2V× 6セ ル=7.2V)
図 I-17 HVバ ッテリ
00 DC― DCコ ンバ…夕(図 I-18)
PCUの下段に搭載しており,HVバッテリの高電圧(288V)を 24Vに減圧して,電装品の電源に供給する。
DC― DCコ ンバータ
図 I-18 DC― DCコ ンバータ
|→ インバータ(図 I-19)
PCUの下段前部に搭載しており,HVバ ッテリ(高電圧の直流電力)と モータ
換を行う電力変換装置である。
ジェネレータ(交流電力)の変
図 I-19 インバータ
ー 103 -

3 点検,整備ポイン ト
運転席メータ部のインジケータ・ランプ及びウォーニング・ランプ表示から,車両のシステムが正常状態か,
異常や不具合が出ていないかを確認する事ができる。
ハイブリッド・システム搭載車両のため,高電圧回路に関わる点検・整備を行う場合は,労働安全衛生法第
59条 ならびに労働安全衛生規則第36条 により特別教育の受講が義務付けられているので受講してから作業
すること。高電圧回路の点検整備時は次の項目を厳守して作業すること。
・保護具(絶縁手袋,保護めがね,安全靴)を装着する。
・スタータ 0キ ーをOFFに する。
・サービス・プラグを取り外す。
・サービス・プラグを取り外した後,コ ンデンサが放電するまで7分間待つ。
1)イ ンジケータ及びウォーニング表示 (図 I-20,21)
コンビネーション・メータ内に運転時のシフト位置を表示するインジケータ,AMTシステム及び,ハ イブ
リッド・システムが異常時に警報表示するウォーニング・ランプ, また省エネ運転を支援するインジケー
タ。ランプ類を設置した。
READYラ ンプ シフト・インジケータ
AM丁 ウォーニング
HVノ ッ`テリ容量アイドル・ストップ・ランプ
AS丁 ランプ CHGラ ンプ HVウ ォーニング・ランプ
図 I-20 コンビネーション・メータ全体図
アイドル・ストップ・キャンセル・ランプ
9♂2140L輻
-104-

(1)シ フト・インジケータ 運転時のシフト位置を表示する。
シフト・ポジション/ギヤ段表示
□―
自動変速
□\
乳モード
(2)AMTウ ォーニング・ランプ
(赤色)
AMTシステムに異常が発生 している時に点灯
して警報表示する。点滅時は重要機能が停止
している状態で,走行中はギヤ位置が保持 さ
れ変速できない。0
(3)HVウ ォーニング・ランプ(橙
色 )
ハイブリッド・システムに異常が発生してい
る時,点灯して警報表示する。 HV(4)READYラ ンプ(緑色 )
エ ンジン始動後発進準備が完了すると点灯す
るので,こ のランプが点灯 してからアクセル・
ペダルを操作する。
鑽顧AttY
(5)ア イ ドル・ス トップ・ランプ
(緑色)
ア イ ドル ス トップが作動中に点灯する。 0(6)ア イ ドル・ス トップ 。キャン
セル・ランプ(橙色 )
アイ ドル・ス トップ 。キャンセル・スイッチ
がONの状態で,ア イ ドル・ス トップが非作動
状態にあるときに点灯する。
OoFF
(7)ECOラ ンプ(緑色 )
省エネ運転が実施されている時に点灯する。
(点灯し続けるよう運転すると省エネの効果が
得られる)PWRモード,Sレ ンジでは点灯しない。
一曇一e一饉
(8)ハ イブリッド・インジケータ
HVバ ッテリ充電状態を表示。
(5段 階表示)
CHGHVバ ッテリが充電中に表示。
AST始動,モ ータ発進, トルク・アシス ト時
などHVバ ッテリ電力使用中に表示。
図 I-21 インジケータ及びウォーニング
2)故 障診断機能
AMTシステムに故障が発生 した時,前項のウォーニング・ランプで運転者に故障を知らせると共に故障箇
所をダイアグ・コー ドとして記憶する。
ダイアグ・コー ドの確認は,AMTシ ステムについてはHino一 DX(専用ツール)を使用する。
HVシステムについてはDLCコ ネクタのTC端子をアース短絡 し,ウ ォーニング・ランプの点滅数を確認す
るか,又はHinO― DX(専用ツール)を使用 してコー ドを読み取 り,その後の診断を進めるには整備解説書
「故障診断編」を使用し,ダイアグ・コード・ベースに調査・点検して解析を行う。
- 105 -
」・・
iI::::::i:甘 il:::::「
・di
:.旦
=■
.:

3)初 期学習,調整,登録作業
関連する部品を交換 した場合,下記一覧の様な学習作業が必要になる。
4)学 習手順要領
(1)ニ ュー トラル,セ レク ト位置学習
この学習は,ニ ユー トラル位置と各セレクト位置をECUに 記憶させる作業である。
(イ)ニュー トラル,セ レク ト位置学習手順 (ECU初期, リセット時)
本学習はシフト・ポジション・インジケータが「E」 点灯の場合のみ実施可能。
(a)ス タータ 。キーを「LOCK」 にして,運転席インパネ右下にあるDLC3コ ネクタの4番端子と13番端子間を特
殊工具を使用して短絡する。 (図 I-22)
特殊工具で端子間を短縮させる
図 I-22 DLC3コ ネクタ(4番~ 13番間短絡)
注意 この短絡作業を3分間以上続けると,サプライ 。ポンプの機差学習が初期化されるので,本学習修了後はポ
ンプの機差学習を行うこと。
困
交換部品名 必要な学習作業学習作業をしなかった場合に
起こりうる現象
AMToECUニュー トラル,セ レクト位置学習
シフト位置学習
トランスミッション履歴データの初期化
エンジン始動不可
変速不可
セレク ト・ス トローク・セン
サ
ニュー トラル,セ レクト位置学習 (再学習)
シフト位置学習
・変速不良。P188Aダ イアグ・コー ドの誤出力
シフ ト・ス トローク・センサニユートラル,セ レクト位置学習(再学習)
シフト位置学習
変速不良
P188Cダ イアグ・コー ドの誤出力
セ レク ト・アクチュエータ
Assy
ニュー トラル,セ レクト位置学習 (再学習)
シフト位置学習
・変速不良。P188Aダ イアグ・コー ドの誤出力
シ フ ト・ ア ク チ ュ エ ー タ
Ass y
ニュー トラル,セ レクト位置学習 (再学習 )
シフト位置学習
・変速不良。P188Cダ イアグ・コー ドの誤出力
トランスミッションAsゞyニュー トラル,セ レク ト位置学習 (再学習)
シフ ト位置学習
変速不良
P188Aダ イアグ・コー ドの誤出力
)av+'7)*zt-lAss'y
ACUモータ断・接回数の初期化 ・P191Aダ イアグ・コー ドの誤出力
。シフ ト・ ア クチ ュエ ー タ
Assy・ トラ ンス・ アクチ ュエー
タ・ シフ ト・モータAsぎy
シフト・モータ駆動回数の初期化 。P0919ダイアグ・コー ドの誤出力
・セ レク ト・ アクチュエータ
Ass y
・ トラ ンス・ ア クチ ュエ ー
タ。セレクト・モータAsぎy
セレクト・モータ駆動回数の初期化 ・P0909ダイアグ・コー ドの誤出力
クラッチ 。デイスククラッチ・ス トローク・センサの出力電圧の調整
クラッチ過熱回数の初期化
。P0806,P080Aダ イアグ・ コー ドの
誤出力
-106-
特殊工具 :
09843-18040
rJ

(b)セ レクト・レバーを「N」位置にし,ス タータ・キー
を「ON」 (エ ンジンは停止状態),ブ レーキは踏まず
にセレクト0レ バー「 +」へ5秒以上押し付け,イ ン
ジケータが「E」 の点灯から「A」 の点滅になることを
確認する。(図 I-23)
(C)セ レクト・レバーを「N」位置まで戻し,イ ンジケー
タが「b」 の点灯になる事を確認する。(図 I-24)
参考 。「A」点滅開始から約50秒で学習が修了する。
・異常時は「A」の点灯となる。
・異常の場合は再度(a)か ら学習を行う。
(d)イ ンジケータが「b」 か「A」 の点灯になったことを確
認して,ス タータ・キーを「LOCK」 にして,DLC3コネクタの4番端子間の短絡を解除する。
lnl ニュートラル,セ レクト位置学習手順 (再学習)
→
注意 本学習はシフト・ポジション・インジケータが「E」 点灯以外の場合に実施可能。
「E」が点灯した場合は,0の初期学習を再度させる。
(a)ス タータ・キーを「LOCK」 にして,DLC3コ ネクタの4番端子端子と13番端子間を特殊工具を使用して「に)
ニユートラル,セ レクト位置学習手順(ECU初期, リセット時)(図 I-22)」 の要領で短絡させる。
特殊工具 :09843-18040
注意 この短絡作業を3分間以上続けると,サプライ 0ポ ンプの機差学習が初期化されるので,本学習修了後はポ
ンプの機差学習を行うこと。
(b)セ レクト・レバーを「N」位置にし,ス タータ・キーを「ON」 (エ ンジンは停止状態),ブ レーキは踏まずにセ
レクト・レバー「 +」へ5秒以上押し付け,イ ンジケータが「N」の点灯から「b」 か「c」か「d」 か「F」 の点灯にな
ることを確認する。(図 I-25)
図 I-23 ニュートラル,セ レクト位置学習
(ECU初期, リセット時)①
図 I-24 ニュートラル,セ レクト位置学習
(ECU初期, リセット時)②
点灯
→
点灯
難因点灯
鶏因又はL
-26 ニュートラル,セ レクト位置学習(再学習)②
困
図I-25 ニュートラル,セ レクト位置学習(再学習)①
(CXDの 点灯 を確認 しセレク ト・ レバーを「N」 に戻す。
その後,セ レク ト・ レバー「 +」へ 1秒以上押 し付け,
インジケータが「 A」 の点滅になる事を確認する。 (図
I-26)図 I
(d)セ レクト・レバーを「N」位置まで戻し,イ ンジケー
タが「b」 か「c」 の点灯になる事を確認する。 (図 I―
27)
輌囚
図 I-27 ニュー トラル,
- 107 -
セレクト位置学習(再学習)③
鮒困

参考 ・「A」点滅開始から約 50秒で学習が修了する。
・異常時は「A」の点灯となる。
・異常時の場合は,(a)の初期学習を再度させる。
(eXd)を確認して,ス タータ・キーを「LOCK」 にする。
DLC3コ ネクタの4番端子と13番端子の短絡を解除して完了。
(2)シ フト位置学習
この学習は,ニユートラル,セ レクト位置学習終了後に必ず行う。
同 シフト位置学習手順
注意 ・本学習はシフト・ポジシヨン・インジケータが「E」 点灯以外の場合に実施可能。
・「E」 が点灯した場合は,「ニュートラル,セ レクト位置学習手順(ECU初期, リセット時)」 を行う。
(a)セ レクト・レバーを「N」位置の状態でエンジンをかけ,パーキングを解除しブレーキを踏んでシフト・レ
バー「S」位置まで操作し,イ ンジケータが「N」 と「E」の交互点滅から「 1」 と「E」の交互点滅になる事を確認す
る。(図 I-28)
点滅
□交互
-
交互
-
困 →困 轟因点滅
インジケータが 「1」 と
図 I-28 シフト位置学習①
(b)ブ レーキを踏んだ状態で,セ レクト・レバー「+」へ操作しシフト・アップさせて,
「E」の交互点滅から「2」 と「E」 の交互点減になる事を確認する。(図 I-29)
点滅
因 →因図I-29 シフト位置学習②
交互
-
(CXJを繰 り返 し行い,5速までシフト・アップさせてインジケータの数字も上がっていく事を確認する。 (イ
ンジケータは「ギヤ段」と「E」の交互点滅)
注意 必ずインジケータの数字が変わったことを確認してから,次のギヤ段へのシフト・アップを行うこと。
に)セ レクト・レバーを「R」位置まで操作 して,イ ンジケータが「R」 の点灯になることを確認する。
参考 ・異常時は「R」 と「E」 の交互点滅となる。
・異常の場合は再度1速から学習を行う。
(e)セ レクト・レバーを「N」位置まで操作 して,イ ンジケータが「N」の点灯になることを確認する。
(3)ク ラッチ学習
クラッチ・デイスクのバラツキを補正するため,半クラッチ点のス トローク 0セ ンサの値及びクラッチの ト
ルク伝達特性をECUに記憶させる作業。
参考 このクラッチ学習は,発進時の対応遅れやショックが発生する場合に実施すると改善できる可能性がある。
m クラッチ学習手順
注意 。本学習はインジケータが「N」点灯の場合のみ実施可能。
・「N」 点灯で無い場合は,「ニュートラル,セ レクト位置学習手順(ECU初期, リセット時)又は,「 シフト位
置学習手順」を行うこと。
- 108 -
(a)ス タータ・キーを「LOCK」 にして,運転席インパネ右下にあるDLC3コ ネクタの4番端子と13番端子間を特
殊工具を使用 してRl)ニ ュー トラル,セ レクト位置学習 (図 I-22)」 の要領で短絡させる。
特殊工具 :09843-18040
注意 この短絡作業を3分間以上続けると,サプライ 0ポ ンプの機差学習が初期化されるので,本学習修了後はポ
ンプの機差学習を行うこと。
(b)車両を停止し,セ レクト・レバーを「N」位置にし,エ ンジン始動後,ブレーキを踏まずにセレクト・レバー
「 +」へ 5秒以上押 し付け,イ ンジケータが「N」の点灯から「b」 か「 c」 か「 d」か「F」の点灯になることを確認す
る。
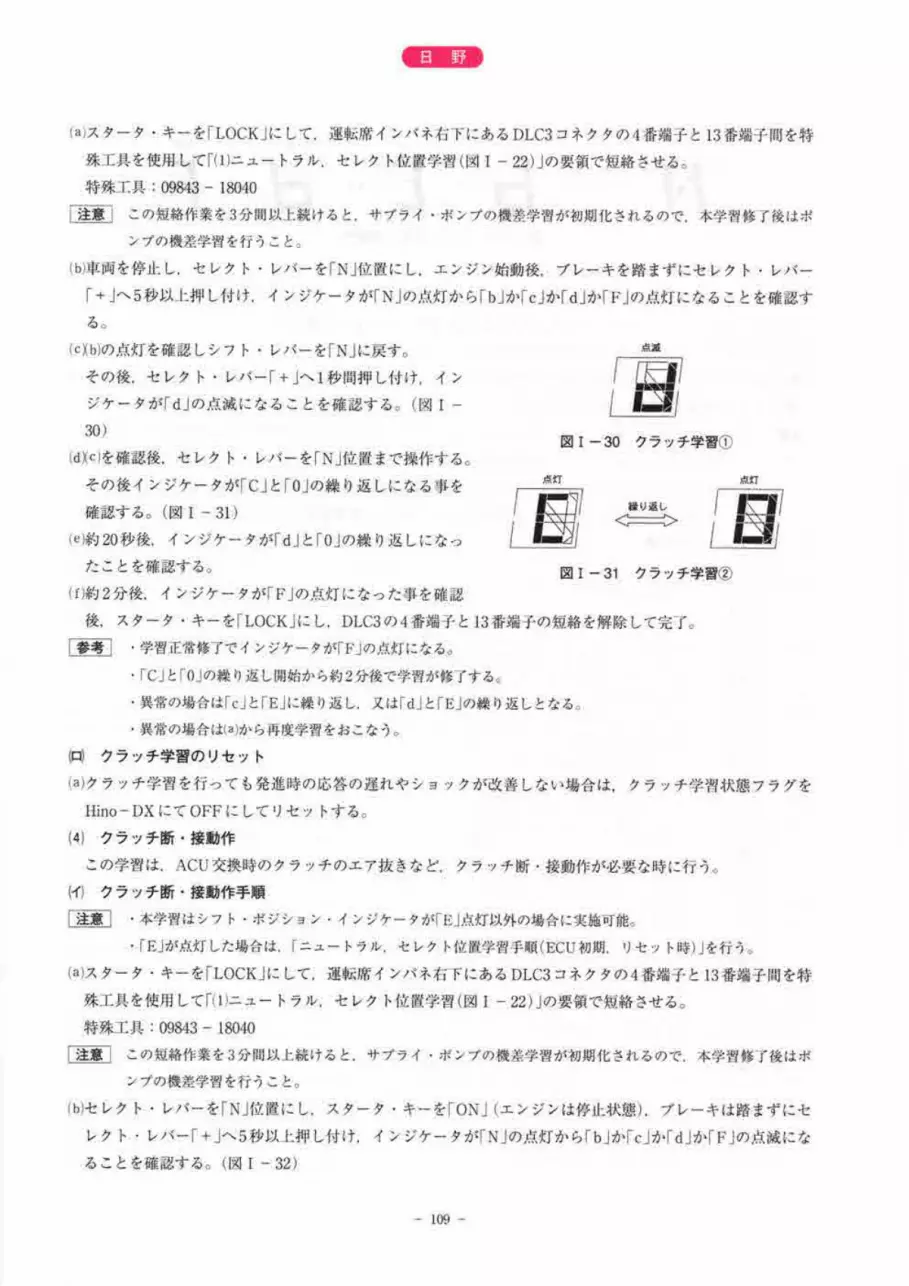
(CX→の点灯を確認しシフト・レバーを「N」に戻す。
その後,セ レクト・レバー「 +」へ1秒間押し付け,イ ン
ジケータが「 d」 の点滅になることを確認する。 (図 I―
30)
にXC)を確認後,セ レク ト0レバーを「N」位置まで操作する。
その後インジケータが「C」 と「 0」 の繰 り返 しになる事を
確認する。 (図 I-31)
(e)約 20秒後,イ ンジケータが「d」 と「0」 の繰 り返しになっ
たことを確認する。 図I-31 クラッチ学習②
(f)約 2分後,イ ンジケータが「F」の点灯になった事を確認
後,ス タータ 0キ ーを「LOCK」 にし,DLC3の 4番端子と13番端子の短絡を解除して完了。
参考 0学習正常修了でインジケータが「F」 の点灯になる。
。「C」 と「0」の繰り返し開始から約2分後で学習が修了する。
・異常の場合は「c」 と「E」 に繰り返し,又は「d」 と「E」 の繰り返しとなる。
・異常の場合は(a)か ら再度学習をおこなう。
lnl クラッチ学習のリセット
(a)ク ラッチ学習を行っても発進時の応答の遅れやショックが改善しない場合は,ク ラッチ学習状態フラグを
Hino― DXにてOFFに してリセットする。
(4)ク ラッチ断・接動作
この学習は,ACU交換時のクラッチのエア抜きなど,ク ラッチ断・接動作が必要な時に行う。
m クラッチ断・接動作手順
注意 ・本学習はシフト・ポジション・インジケータが「E」`点灯以外の場合に実施可能。
。「E」 が点灯した場合は,「ニュートラル,セ レクト位置学習手順(ECU初期, リセット時)」 を行う。
(a)ス タータ・キーを「LOCK」 にして,運転席インパネ右下にあるDLC3コ ネクタの4番端子と13番端子間を特
殊工具を使用してRl)ニ ュートラル,セ レクト位置学習(図 I-22)」 の要領で短絡させる。
特殊工具 :09843-18040
注意 この短絡作業を3分間以上続けると,サプライ・ポンプの機差学習が初期化されるので,本学習修了後はポ
ンプの機差学習を行うこと。
(b)セ レクト・レバーを「N」位置にし,ス タータ 0キ ーを「ON」 (エ ンジンは停止状態),ブ レーキは踏まずにセ
レクト・レバー「 +」へ5秒以上押し付け,イ ンジケータが「N」の点灯から「b」 か「c」 か「d」 か「F」の点滅にな
ることを確認する。(図 I-32)
1倒|
困図I-30 クラッチ学習①
繰 り返 し
- 鮒困蝠
- 109 -

点灯
□点減
困 難 難因→
図I-32 クラッチ断・接動作
(CXb)の 点灯を確認しセレクト・レバーを「N」 に戻す。
その後,セ レクト0レバーを「N」 に戻す。
その後,セ レクト・レバー「―」へ押し付けるとACUがクラッチ断へ作動する。
に)同様にセレクト・レバー「S」へ戻すとACUがクラッチ接へ作動する。
(e)終了後セレクト・レバーを「N」位置まで操作して,ス タータ・キーを「LOCK」 にする。DLC3コ ネクタの4
番端子と13番端子の短絡を解除して完了。
注意 クラッチ断・接動作を行うため,セ レクト・レバーを「―」⇔「S」操作する時は,誤ってセレクト・レバーを
「+」位置に操作しないこと。「+」位置に操作した場合, トランスミッションのニュートラル・セレクト位置
学習が起動する場合がある。(イ ンジケータ表示が「A」の点滅の場合は学習が起動している)
誤って起動させた場合は,そのまま学習を続行させ,その後,整備解説書の手順に従って学習を完了させる。
5)ダイアグ・コード表
DTCコ ー ド 検出項目
P0563 24V電源異常
P0719 ブレーキ・スイッチ故障
P0721 アウトプット・シャフト回転センサ故障[異常値]
P0722 アウトプット・シャフト回転センサ故障 [無信号]
P0806 クラッチ・ス トローク・センサ故障
P080A クラッチ・ス トローク・センサ故障
P0810 オー ト・クラッチ・ユニット故障
P0811 クラッチ摩耗警報
P0820 セレク ト・レバー故障
P0881 バッテリ電源異常
P0901 オー ト・クラッチ・ユニット故障
P0904 セレクト・ス トローク・センサ故障
P0905 セレクト・ス トローク・センサ故障
P0909 セレク ト・モータ交換時期
P0914 シフ ト・ス トローク・センサ故障
P0915 シフ ト・ス トローク・センサ故障
P0919 シフ ト・モータ交換時期
P1806 オー ト・クラッチ・ユニット・ス トローク・センサ故障
P1807 オー ト・クラッチ・ユニット・ス トローク・センサ故障
P1808 オー ト・クラッチ・ユニット・ス トローク・センサ故障
P188A セレクト・ユニット故障
P188C シフト・ユニット故障
P191A オー ト・クラッチ・ユニット・モータ交換時期
P191C オー ト・クラッチ・ユニット・モータ故障
U0073 CAN通信異常 [バスオフ]
U0100 エンジンECU oCAN通 信途絶
U0293 HV・ ECU oCAN通 信途絶
-110-