flujo de curvatura media en espacios euclídeos. curve shortening flow
TRANSCRIPT

Universidad Autónoma de MadridFacultad de Ciencias
Departmento de Matemáticas
Flujo de Curvatura Media en Espacios Euclídeos
Trabajo de Fin de Máster
Máster en Matemáticas y Aplicaciones
EDUARDO MOTA SÁNCHEZ
Supervisor: Luis Guijarro
Madrid, Junio 2016


Índice generalÍndice general
Abstract 3
1. Introducción 5
I Resultados Básicos sobre el Flujo de Acortamiento de Curvas 9
2. Evolución de Curvas en el Plano 11
3. Conservación del embeddedness 15
II Existencia de Soluciones del Flujo 21
4. Existencia y Unicidad de Soluciones a Corto Plazo 234.1. Teoría de Ecuaciones en Derivadas Parciales Parabólicas . . . . . . . . . . . . . . . . 234.2. Existencia de Soluciones a Corto Plazo para el CSF . . . . . . . . . . . . . . . . . . . 25
5. Existencia de Soluciones a Largo Plazo 295.1. Problema equivalente para curvas convexas . . . . . . . . . . . . . . . . . . . . . . . 295.2. La propiedad de convexidad se preserva bajo el flujo . . . . . . . . . . . . . . . . . . . 325.3. Estimaciones a priori para curvas convexas . . . . . . . . . . . . . . . . . . . . . . . . 325.4. Cotas de las derivadas de orden superior de κ . . . . . . . . . . . . . . . . . . . . . . 36
III Circularidad Asintótica 41
6. Las Curvas Convexas se Reducen a Puntos 43
7. Las Curvas se Vuelven Circulares 47
IV Convergencia Circular C2 y C∞ 51
8. Convergencia en Sentido C2 53
9. Convergencia en Sentido C∞ 57
V El Flujo de Acortamiento de Curvas No Convexas 67
10.Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo 6910.1. Teorema de Grayson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6910.2. Demostración del Teorema de Grayson . . . . . . . . . . . . . . . . . . . . . . . . . . 71
VI Comentarios finales 81
1


ResumenResumen
En este trabajo se estudia el Flujo de Curvatura Media particularizado en el caso decurvas planas, en lo que se conoce como Flujo de Acortamiento de Curvas (en inglés CurveShortening Flow (CSF)).Nos centraremos en teoremas globales acerca de la existencia de soluciones y la forma asintóticade las mismas. Todos los resultados descritos han aparecido en trabajos de investigación de granimpacto, y son incluidos por ser considerados como integrales para una exposición de este tema.Una familia de curvas cerradas en el plano se dice que evoluciona por el flujo de acortamientode curvas para 0 ≤ t < T si una parametrización γ(·, t) : S1× [0, T )→ R2 satisface la ecuación
∂γ
∂t= κN 1
donde N es el vector normal unitario interior y κ es la curvatura.El objetivo final es probar el teorema de Grayson [4], el cual resumirá todo el estudio hechosobre el CSF y del que damos un primer enunciado aquí:
Teorema 0.1. Sea γ una curva cerrada y embedded en el plano, entonces el CSF encoge γ aun punto en tiempo finito y γ se hará asintóticamente circular.
Dividiremos el estudio del problema de la siguiente manera. La parte I contiene fórmulasbásicas y preliminares analíticos relativos al flujo. Estableceremos la evolución de ciertascantidades geométricas relevantes.Veremos en la parte II lo concerniente a la existencia de soluciones. Comenzando por laexistencia y unicidad de soluciones en corto plazo (siguiendo [5]) para después probar laexistencia de soluciones en cualquier tiempo finito. Desde esta segunda mitad y hasta la últimaparte, nos centraremos en el caso de curvas convexas.En la parte III estudiaremos la forma geométrica que toman las soluciones cuando el tiempocrece.La parte IV estará dedicada a probar que la convergencia de las soluciones es en el sentidoC2 y C∞. Hasta aquí nos apoyamos fundamentalmente en los trabajos [1], [2], [3] y [5].Por último, siguiendo [6], mostramos en la parte V que las curvas embedded en el plano (nonecesariamente convexas) evolucionan por el flujo a curvas convexas y, por consiguiente, secontraen a un punto mientras que su forma tiende a ser cada vez más circular.
Keywords
Acortamiento de Curvas, Flujo de Curvatura, Flujo del Calor, Curvatura Media, Ecuacióndel Calor, Desigualdad isoperimétrica
3


IntroducciónCapítulo 1: Introducción
¿Es posible deformar una curva de forma continua cumpliéndose que:
1. las partes más curvadas se descurven más rápidamente;
2. la curva no se cruce consigo misma;
3. la deformación genere una forma circular después de cierto tiempo?
La respuesta a esta pregunta es que sí, y el método utilizado es el flujo de curvatura.El Flujo de Curvatura Media unidimensional o flujo de acortamiento de curvas (CSF) es elproceso que modifica una curva diferenciable moviendo sus puntos de forma perpendicular a lacurva a una velocidad proporcional a la curvatura. Es un ejemplo de flujo geométrico, comotambién lo es el famoso flujo de Ricci, con el cual está relacionado dado que los avances en elestudio de uno propiciaron el interés en el otro.Un importante número de técnicas utilizadas en el estudio de otros flujos geométricos se muestranen éste de forma más elegante y a la vez menos técnica. El CSF lo propuso en 1956 WilliamW. Mullins, mientras estudiaba la evolución del movimiento de superficies de separación entrecristales, las que se conocen como bordes de grano [7]. En 1978 Kenneth A. Brakke estudióel flujo de curvatura media en el contexto de teoría geométrica de la medida.El interés por el flujo de acortamiento de curvas se renovó a finales de la década de los años 80como resultado de los trabajos de Michael E. Gage en curvas planas convexas, el de MatthewA. Grayson sobre curvas planas embeddidas y el éxito del Flujo de Ricci utilizado por RichardS. Hamilton en la búsqueda de solución para la Conjetura de Poincaré.Más tarde, este flujo ha sido aplicado al análisis de imágenes para dar una representación a esca-la múltiple de formas geométrticas. Puede también utilizarse para modelizar la reacción-difusiónde sistemas, así como el comportamiento de autómatas celulares, modelos matemáticos desistemas dinámicos utilizados para estudiar sistemas naturales que puedan ser descritos comouna colección masiva de objetos simples que interactuén localmente unos con otros.Un flujo es un proceso en el cual los puntos del dominio cambian sus localizaciones o propiedadesde forma continua con el paso del tiempo. De forma más específica, en un flujo geométricounidimensional como el que vamos a estudiar los puntos sometidos al flujo pertenecen a unacurva, y lo que cambia es la forma de la curva. Una curva que evolucione bajo este flujo queesté representada por una función de dos parámetros γ(s, t), donde s parametriza la longitudde arco y t el tiempo de evolución, el CSF se describe por la ecuación en derivadas parcialesparabólica
∂γ
∂t=∂2γ
∂s2= κN,
una forma de la ecuación del calor, donde κ es la curvatura y N es el vector normal unitario.Dado que los elementos que componen la ecuación (longitud de arco, curvatura, tiempo) no seven afectados por traslaciones o rotaciones del plano Euclídeo, se tiene que el flujo es invariantebajo estas transformaciones. Si el plano es escalado por un factor de dilatación constante,el flujo se mantiene si cambios esenciales (sólo se acelera o ralentiza). A lo largo de estaexposición, probaremos que si los puntos de una curva diferenciable, cerrada y simple se mueven
5
Capítulo 1. Introducción
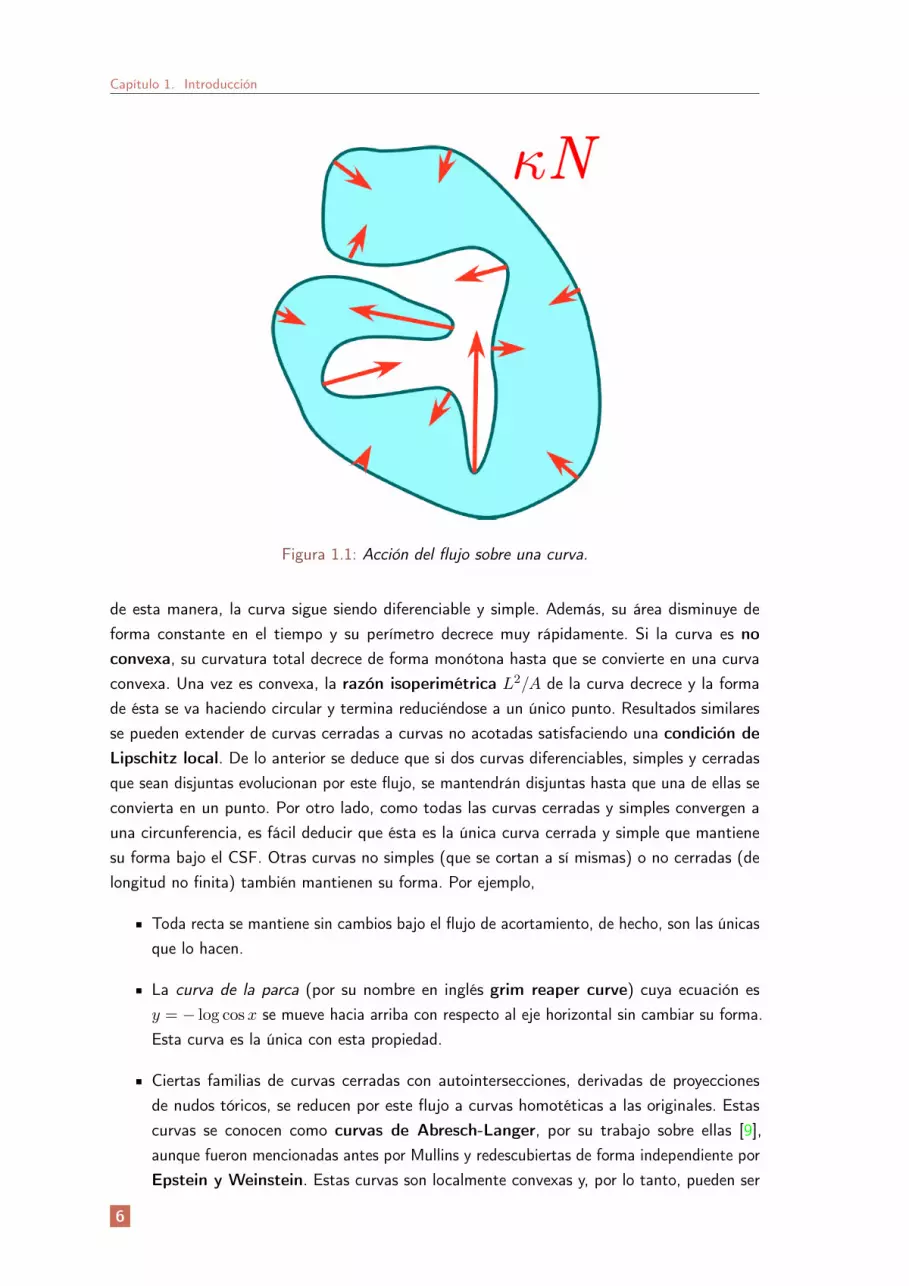
Figura 1.1: Acción del flujo sobre una curva.
de esta manera, la curva sigue siendo diferenciable y simple. Además, su área disminuye deforma constante en el tiempo y su perímetro decrece muy rápidamente. Si la curva es noconvexa, su curvatura total decrece de forma monótona hasta que se convierte en una curvaconvexa. Una vez es convexa, la razón isoperimétrica L2/A de la curva decrece y la formade ésta se va haciendo circular y termina reduciéndose a un único punto. Resultados similaresse pueden extender de curvas cerradas a curvas no acotadas satisfaciendo una condición deLipschitz local. De lo anterior se deduce que si dos curvas diferenciables, simples y cerradasque sean disjuntas evolucionan por este flujo, se mantendrán disjuntas hasta que una de ellas seconvierta en un punto. Por otro lado, como todas las curvas cerradas y simples convergen auna circunferencia, es fácil deducir que ésta es la única curva cerrada y simple que mantienesu forma bajo el CSF. Otras curvas no simples (que se cortan a sí mismas) o no cerradas (delongitud no finita) también mantienen su forma. Por ejemplo,
Toda recta se mantiene sin cambios bajo el flujo de acortamiento, de hecho, son las únicasque lo hacen.
La curva de la parca (por su nombre en inglés grim reaper curve) cuya ecuación esy = − log cosx se mueve hacia arriba con respecto al eje horizontal sin cambiar su forma.Esta curva es la única con esta propiedad.
Ciertas familias de curvas cerradas con autointersecciones, derivadas de proyeccionesde nudos tóricos, se reducen por este flujo a curvas homotéticas a las originales. Estascurvas se conocen como curvas de Abresch-Langer, por su trabajo sobre ellas [9],aunque fueron mencionadas antes por Mullins y redescubiertas de forma independiente porEpstein y Weinstein. Estas curvas son localmente convexas y, por lo tanto, pueden ser
6

Figura 1.2: La curva grim reaper.
descritas por sus funciones soporte. Bajo los reescalamientos apropiados, estas funcionessatisfacen la ecuación diferencial
h′′ + h =1
h,
la cual tiene soluciones periódicas positivas (correspondiendo a curvas con evoluciónautosemejante) para cualquier periodo que esté estrictamente entre π y π
√2.
Otras curvas, entre las que se incluyen ciertas espirales infinitas, se mantienen autose-mejantes con movimientos más complicados que incluyen rotaciones o combinaciones derotaciones, reducciones o expansiones, y traslaciones.
Comenzamos ya a introducir la teoría necesaria que nos lleve a probar el teorema de Grayson.
7


I
Resultados Básicos sobre el Flujo de Acortamiento de Curvas


Evolución de Curvas en el PlanoCapítulo 2: Evolución de Curvas en el Plano
En este capítulo se exponen resultados sobre curvas cerradas y simples en el plano y laevolución de sus cantidades geométricas más importantes al seguir la evolución por el flujode curvatura. En particular se prueba cuál es la evolución de la longitud y el área de la curva.Consideramos S1 con parámetro u (módulo 2π) y escrbimos la curva como (x, y) = γ(u).Tomando la longitud de arco s, podemos escribir la ecuación de calor para la curva como
∂x
∂t=∂2x
∂s2,∂y
∂t=∂2y
∂s2.
La derivada ∂/∂t se toma sobre valores fijos del parámetro u. El operador ∂/∂s viene dado entérminos de u por
∂
∂s=
1
v
∂
∂u,
donde v =√
(∂x/∂u)2 + (∂y/∂u)2 = |∂γ/∂u|.Siendo T y N los vectores unitarios tangente y normal interior respectivamente, las ecuacionesde Frenet dicen que
∂T
∂u= vκN,
∂N
∂u= −vκT.
Comenzamos a exponer las fórmulas necesarias para el estudio de este flujo en los siguienteslemas y proposiciones.
Lema 2.1.∂v
∂t= −κ2v.
Demostración.
∂
∂tv2 =
∂
∂t<∂γ
∂u,∂γ
∂u>= 2 <
∂γ
∂u,∂2γ
∂t∂u>= 2 <
∂γ
∂u,∂2γ
∂u∂t>
= 2 < vT,∂
∂u(κN) >= 2 < vT,
∂κ
∂uN − vκ2T >= −2v2κ2.
2.1
Desarrollando ∂∂tv
2 y despejando se obtiene la fórmula buscada.
Obtenemos ahora la evolución de la longitud de la curva.
Lema 2.2.∂L
∂t= −
∫κ2 ds.
Demostración.
∂L
∂t=
∫ 2π
0
∂
∂tv du = −
∫ 2π
0κ2v du = −
∫ L
0κ2 ds.
Se tiene también la siguiente relación para los operadores ∂∂t y
∂∂s .
11

Capítulo 2. Evolución de Curvas en el Plano
Lema 2.3. Las derivadas con respecto al tiempo y a la longitud de arco no conmutan, dadoque el movimiento normal a la curva afecta a la longitud de arco. La relación existente es
∂
∂t
∂
∂s=
∂
∂s
∂
∂t+ κ2 ∂
∂s.
Demostración.
∂
∂t
∂
∂s=
∂
∂t
1
v
∂
∂u= κ2 1
v
∂
∂u+
1
v
∂
∂u
∂
∂t= κ2 ∂
∂s+
∂
∂s
∂
∂t.
Las derivadas de los vectores T y N vienen dadas por
Lema 2.4.∂T
∂t=∂κ
∂sN,
∂N
∂t= −∂κ
∂sT.
Demostración.Para la primera ecuación,
∂T
∂t=
∂
∂t
1
v
∂γ
∂u=
∂2γ
∂t∂s=
∂2γ
∂s∂t+ κ2∂γ
∂s
=∂
∂s(κN) + κ2T =
∂κ
∂sN − κ2T + κ2T.
2.2
Para la segunda,
0 =∂
∂t< T,N >=<
∂κ
∂sN,N > + < T,
∂N
∂t>,
luego
−∂κ∂s
=< T,∂N
∂t> .
Sea ahora θ el ángulo entre el eje x y el vector tangente. Se cumple que
Lema 2.5.∂θ
∂t=∂κ
∂s,∂θ
∂s= κ.
Demostración.Dado que T = (cos θ, sin θ), tenemos que
∂θ
∂t(− sin θ, cos θ) =
∂
∂t(cos θ, sin θ) =
∂T
∂t=∂κ
∂s(− sin θ, cos θ),
vκ(− sin θ, cos θ) = vκN =∂T
∂u=
∂
∂u(cos θ, sin θ) = v
∂
∂s(cos θ, sin θ) = v
∂θ
∂s(− sin θ, cos θ).
2.3
Obtenemos el comportamiento de la evolución de la curvatura con el siguiente resultado.
12

Lema 2.6. La evolución de la curvatura con respecto de la longitud de arco viene dada por
∂κ
∂t=∂2κ
∂s2+ κ3.
Demostración.
∂κ
∂t=
∂2θ
∂t∂s=
∂2θ
∂s∂t+ κ2∂θ
∂s=∂2κ
∂s2+ κ3.
Por último, calculamos la ecuación de evolución para el área A encerrada por una curvasimple y cerrada.
Lema 2.7.∂A
∂t= −2π
Demostración.
A =1
2
∫ 2π
0
(x∂y
∂u− y∂x
∂u
)du = −1
2
∫ 2π
0< γ, vN > du,
∂A
∂t= −1
2
∫ 2π
0<∂γ
∂t, vN > + < γ,
∂v
∂tN > + < γ, v
∂N
∂t> du
= −1
2
∫ 2π
0vκ− < γ, vκ2N > + < γ,−∂κ
∂uT > du,
2.4
donde hemos utilizado que v ∂N∂t = −v ∂κ∂sT = −∂κ∂uT . Ahora, integrando el último término por
partes
∂A
∂t= −1
2
∫ 2π
0vκ− < γ, vκ2N > + <
∂γ
∂u, κT > + < γ, vκ2N > du
= −1
2
∫ 2π
0vκ+ < vT, κT > du = −
∫ 2π
0vκ du = −
∫ 2π
0κ ds = −2π,
2.5
observando que la curvatura total de una curva cerrada simple es 2π.
Observación 1. Para el caso de una curva cerrada, no simple la integral de línea en lema 2.7define el área ponderada
A =
∫(x,y)∈R2
w(x, y) dx dy,
donde w(x, y) es el índice de la curva con respecto al punto (x, y). La tasa de decrecimiento deA en este caso es −2π multiplicado por el índice de rotación de la curva.
13


Conservación del embeddednessCapítulo 3: Conservación del embeddedness
En esta sección se prueba que las curvas embedded siguen siéndolo durante su evoluciónsiempre que la curvatura se mantenga acotada. El resultado principal de la sección, enunciado acontinuación, nos garantizará por tanto que una curva que no se corta a sí misma inicialmenteno desarrollará autointersecciones bajo este flujo.
Teorema 3.2. Sea γ : S1× [0, T )→ R2 una familia de curvas cerradas satisfaciendo ∂γ∂t = κN .
Si |κ(u, t)| < M y γ(·, 0) es embedded, entonces γ(·, t) es una curva embedded para cada t.
Probaremos varios resultados necesarios para la demostración de este teorema.Definimos en primer lugar f : S1 × S1 × [0, T )→ R1 como f(u1, u2, t) = |γ(u1, t)− γ(u2, t)|2.
Lema 3.8. La función f satisface la ecuación del calor siguiente:
∂f
∂t= ∆f − 4 =
∂2f
∂s21
+∂2f
∂s22
− 4,
donde ∆f se calcula utilizando el producto de la métrica inducida en S1 consigo mismo.
Demostración.Por la ecuación de evolución que sigue la familia γ, tenemos que
∂f
∂t=
∂
∂t|γ(u1, t)− γ(u2, t)|2
=∂
∂t< γ(u1, t)− γ(u2, t), γ(u1, t)− γ(u2, t) >
= 2 < γ(u1, t)− γ(u2, t), κN(u1, t)− κN(u2, t) >,
3.1
y por otro lado,
∂f
∂s1= 2 < γ(u1, t)− γ(u2, t), T (u1, t) >,
∂f
∂s2= −2 < γ(u1, t)− γ(u2, t), T (u2, t) > .
3.2
∂2f
∂s21
= 2 < T (u1, t), T (u1, t) > +2 < γ(u1, t)− γ(u2, t), κN(u1, t) >,
∂2f
∂s22
= 2− 2 < γ(u1, t)− γ(u2, t), κN(u2, t) > .
3.3
Sumando estas dos últimas ecuaciones y comparando con ∂f∂t se tiene el resultado.
Lema 3.9 (de Schur). Sea g : [0, L]→ R2 una curva parametrizada por la longitud de arco deA en B tal que g junto con el segmento que conecta A y B forman una curva convexa.Sea f una segunda curva de la misma longitud L con puntos extremos C y D.Supongamos que las curvas tienen tangentes continuas y curvatura continua a trozos, y que lacurva g se recorre en el sentido contrario a las agujas del reloj, de forma que su curvatura es
15

Capítulo 3. Conservación del embeddedness
positiva.Si κg(s) ≥ |κf (s)| para todo s, entonces dist(A,B) ≤ dist(C,D).
Demostración.Orientamos las curvas de forma que AB y CD estén situados sobre el eje x. Utilizaremos elparámetro de longitud de arco s para ambas curvas dado que en este lema no estamos tratandocon familias de curvas.Sea θg(s) el ángulo del vector tangente a la curva g en s. Afirmamos que existe exactamente unpunto s0 donde el tangente a g(s0) es paralel al eje x, es decir, θg(s0) = 0. Lo comprobamos:Escribimos g(s) = (x(s), y(s)) y observamos que la función y : [0, L] → R es continua ydiferenciable en [0, L], y que se cumple que y(0) = y(L) = 0. Entonces, existe cierto s0 ∈ (0, L)
tal que y′(s0) = 0.Ahora, g′(s) = T ′(s) = (x′(s), y′(s)) es el tangente de g en s. Por tanto, T ′(s0) = (x′(s0), 0)
es un vector con componente y nula, es decir, paralelo al eje x (y por tanto al segmento AB).La unicidad se obtiene por las hipótesis de convexidad de g y kg(s) > 0, ∀s ∈ [0, L]. Ahora,
Figura 3.1
comodθgds
= κg ≥ |κf | = |dθfds|,
integrando obtenemos que|θf (s)− θf (s0)| ≤ |θg(s)|.
Dado que g y el segmento AB forman una curva cerrada y convexa, el ángulo |θg(s)| es unafunción monótona, luego su variación en 0 ≤ s ≤ L cumple la acotación |θg(s)| ≤ π. Porlo tanto, al tomar cosenos a ambos lados se revierte la desigualdad (por su comportamientodecreciente en el intervalo [0, π]), e integrando entre 0 y L se obtiene∫ L
0cos |θf (s)− θf (s0)| ds ≥
∫ L
0cos |θg(s)| ds
16

El lado derecho de la desigualdad cumple∫ L
0cos |θg(s)| ds =
∫ L
0< Tg(s), e1 > ds
=< g(L)− g(0), e1 >
= |g(L)− g(0)|
= dist(A,B),
3.4
y el lado izquierdo∫ L
0cos |θf (s)− θf (s0)| ds =
∫ L
0cos (θf (s)− θf (s0)) ds,
que es la proyección del segmento CD sobre la tangente a f(s0). Puesto que el segmento essiempre más grande que su proyección, tenemos que
dist(C,D) ≥∫ L
0cos |θf (s)− θf (s0)| ds ≥
∫ L
0cos |θg(s)| ds = dist(A,B),
y hemos terminado.
Sea s(u1, u2, t) = |∫ u2u1v(u, t)du| la distancia a lo largo de la curva entre u1 y u2, recorriendo
la curva en sentido positivo.
Corolario 3.1. Si |κ(u, t)| ≤M , entonces f(u1, u2, t) ≥(
2M sin
(M2 s(u1, u2, t)
))2.Demostración.Tomamos g el arco de longitud s(u1, u2, t) del círculo de radio 1
M .Por hipótesis, |κ| ≤M = κg y g junto con el segmento de cuerda que une sus extremos formauna curva cerrada y convexa. Este segmento tiene longitud 2
M sin(θ2
)= 2
M sin(M2 s(u1, u2, t)
),
donde hemos utilizado que en un círculo el parámetro de longitud de arco es igual al radio porel ángulo que define el arco.Aplicando el teorema anterior, se obtiene la desigualdad enunciada.
Probamos a continuación el teorema 3.2.
Demostración.El objetivo principal es obtener que la función f es inyectiva. Para ello, dividimos el dominio dedefinición en dos partes.Consideramos en primer lugar E = (u1, u2, t) ∈ S1× S1× [0, T ) : s(u1, u2, t) <
πM . En este
conjunto se tiene que f(u1, u2, t) = 0 si y sólo si u1 = u2. Esto se sigue automáticamente porel resultado previo.Nos fijamos ahora en el dominio complementario:
D = (S1 × S1 × [0, T )) \ E = (u1, u2, t) ∈ S1 × S1 × [0, T ) : s(u1, u2, t) ≥π
M.
17

Capítulo 3. Conservación del embeddedness
Vamos a utilizar una versión del Principio del Máximo para ver que f tiene un mínimo positivoen D.La frontera de D viene dada por
∂D = (u1, u2, t) ∈ S1 × S1 × [0, T ) : s(u1, u2, t) =π
M, 0 ≤ t ≤ T∪
∪(u1, u2, 0) ∈ S1 × S1 : s(u1, u2, t) ≥π
M,
donde el primer conjunto representa la frontera espacial y el segundo la frontera temporal.En la frontera espacial s(u1, u2, t) = π
M , por lo que f(u1, u2, t) ≥(
2M sin
(M2πM
))2=(
2M
)2>
0, utilizando el corolario previo. En cuanto a la frontera temporal, sabemos que f debe de tenerun mínimo positivo por la condición de embedding de la curva inicial γ(·, 0). Tomamos como mla más pequeña de estas dos cantidades. Tenemos que f ≥ m > 0 en ∂D.Consideramos la función g(u1, u2, t) = f(u1, u2, t) + εt. Esta función cumple que
∂g
∂t= ∆g − 4 + ε,
lo cual se obtiene observando el valor de ∂f∂t obtenido en lema 3.8.
Sea 0 < δ < m y supongamos que g alcanza el valor m− δ en D. Seat0 = ınft : g(u1, u2, t) = m− δ. La continuidad de g, la compacidad de D y la cotag = f + εt ≥ m+ εt > m > m− δ en la frontera garantizan que el valor m− δ se alcanza porprimera vez en cierto punto interior (u1, u2, t0). Por lo anterior, tenemos que para todo t ≤ t0se cumple g(u1, u2, t0) ≤ g(u1, u2, t), es decir el punto mencionado es un mínimo para g ent ∈ [0, t0]. Por lo tanto en este punto
∂g
∂t≤ 0.
Además, se calcula∂2g
∂s1∂s2= −2 < T (u2, t), T (u1, t) >
que al particularizar en el punto mínimo se obtiene
∂2g
∂s1∂s2= −2 < T (u2, t0), T (u1, t0) >= ±2,
pues en un mínimo los tangentes a la curva deben ser paralelos.Por otro lado, también en este punto, se obtiene que
∂2g
∂s21
· ∂2g
∂s22
− (∂2g
∂s1∂s2)2 ≥ 0,
que es el determinante de la matriz Hessiana de g en un mínimo.Por último,
∆g =∂2g
∂s21
+∂2g
∂s22
≥ 2
ö2g
∂s21
· ∂2g
∂s22
≥ 2| ∂2g
∂s1∂s2| ≥ 4.
De aquí se obtiene una contradicción, pues gt − ∆g = −4 + ε > −4 pero en el mínimogt −∆g ≤ −4.
18

Como δ es arbitrario, tenemos que g(u1, u2, t) ≥ m en D. Entonces, f(u1, u2, t) ≥ m− εT .Haciendo tender ε → 0, vemos que f(u1, u2, t) ≥ m > 0 en D, obteniendo finalmente quef es inyectiva. Como además es continua, el dominio es compacto y el espacio de llegada esHausdorff, f determina un homeomorfismo sobre su imagen, es decir, f es un embedding y secompleta la prueba.
19


II
Existencia de Soluciones del Flujo


Existencia y Unicidad de Soluciones a Corto PlazoCapítulo 4: Existencia y Unicidad de Soluciones a Corto Plazo
El presente capítulo está dedicado a presentar la teoría necesaria sobre EDP’s de tipoparabólico, que será aplicada a la demostración de existencia local y unicidad de solucionesdel flujo de acortamiento de curvas.
4.1. Teoría de Ecuaciones en Derivadas Parciales Parabólicas
Sea I un intervalo de R. Consideremos la EDP parabólica no lineal
ut(x, t) = F (x, t, u, ux, uxx), (x, t) ∈ I × (0, T ), 4.1
donde F : (x, t, p, q, r) ∈ I × (0, T )× R3 7→ F (x, t, p, q, r) ∈ R es diferenciable.Una ecuación como ecuación (4.1) se dice que es parabólica si ∂F∂r (x, t, p, q, r) es positiva enI × (0, T )×R3. Se dice que es uniformemente parabólica si existen números positivos λ, µ talesque λ ≤ ∂F
∂r ≤ µ en I × (0, T )× R3.Una función u : (x, t) ∈ I × (0, T ) 7→ u(x, t) ∈ R se dice que es una solución clásica deecuación (4.1) si u es de clase C2 respecto a x, de clase C1 con respecto a t y satisfaceecuación (4.1).A continuación definimos el espacio parabólico de Hölder Ck,α y el espacio de Hölder Ck,α.Tomamos Q = I × (0, T ) con T > 0 y definimos las normas y semi-normas para funcionesu : Q→ R y v : I → R como sigue. Para α ∈ (0, 1] denotamos
[u]α = sup
|u(x, t)− u(y, s)|
(|x− y|2 + |t− s|2)α/2: (x, t), (y, s) ∈ Q
,
‖u‖C(Q) = sup
(x,t)∈Q|u(x, t)|,
‖u‖Ck,α
(Q) =
∑i+2j≤k
∥∥∥∥ ∂i+ju
∂ix ∂jt
∥∥∥∥C(Q) +
∑i+2j=k
[∂i+ju
∂ix ∂jt
]α
,
[v]α = supx,y∈I
|v(x)− v(y)||x− y|
,
‖v‖C(I) = supx∈I|v(x)|,
‖v‖Ck,α(I) =∑i≤k
∥∥∥∥∂iu∂xi∥∥∥∥C(I)
+
[∂ku
∂xk
]α
.
4.2
El espacio parabólico de Hölder Ck,α(Q) es el espacio vectorial normado consistente en todaslas funciones u : Q→ R tales que son de clase Ck con respecto a x y t, y todas sus derivadasparciales de orden k son continuas Hölder. Análogamente el espacio de Hölder Ck,α(I). Ck,α(Q)
y Ck,α(I) son espacios de Banach con las normas ‖ · ‖Ck,α
(Q) y ‖ · ‖Ck,α(I), respectivamente.
Enunciamos el primero de los resultados necesarios.
Teorema 4.3 (Existencia, unicidad y estimaciones a priori). Consideremos
ut = a(x, t)uxx(x, t) + b(x, t)ux(x, t) + c(x, t)u(x, t)− f(x, t)
23

Capítulo 4. Existencia y Unicidad de Soluciones a Corto Plazo
en Q = S1 × (0, T ) uniformemente parabólica con coeficientes 2π-periódicos en Ck,α(Q) paracierto par (k, α). Sea u0 ∈ Ck+2,α(S1), entonces existe una única solución u en Ck+2,α(Q)
satisfaciendo u(·, 0) = u0 y existe una constante C que depende de λ, µ, k, α tal que
‖u‖Ck+2,α
(Q) ≤ C
(‖f‖
Ck,α(Q) + ‖u0‖Ck+2,α(S1)
).
Utilizando el teorema 4.3 podemos probar la existencia local de soluciones de la EDP nolineal ecuación (4.1).
Teorema 4.4 (Existencia local). Consideremos la ecuación (4.1) uniformemente parabólica enQ = S1 × (0, T ) con F diferenciable. Sea u0 ∈ Ck+2,α(S1) para cierto par (k, α). Supongamosademás que todas las derivadas parciales k-ésimas de F son continuas Hölder. Entonces existeun tiempo positivo t0 ≤ T tal que la ecuación (4.1) tiene una solución u ∈ Ck+2,α(Q(t0)) conQ(t0) = S1 × (0, t0) satisfaciendo u(·, 0) = u0.
Demostración.Utilizaremos el teorema de la función inversa para probar este resultado.Probamos primero el caso u0 = 0. Tomamos Q(t) = S1 × (0, t) e introducimos el funcionalF : X = u ∈ Ck+2,α(Q(t)) | u(·, 0) = 0 → Ck,α(Q(t)) definido porF(u) = ut − F (x, t, u, ux, uxx). Entonces F está bien definido y la derivada de F en u1 vienedada por
DF(u1)(u) = ut −(∂F
∂pu+
∂F
∂qux +
∂F
∂ruxx
), con u ∈ Ck+2,α(Q(t)),
donde las derivadas se toman en u1.Por el teorema 4.3 y la uniformidad parabólica, DF(u1)(u) = 0 tiene una única solución u = 0.Esto significa que la derivada DF(u1) es uno-uno. Es decir, F es invertible. Por tanto, por elTFI, dado δ > 0 tal que para ‖f −F(u1)‖
Ck,α(Q(t)
) < δ existe una única u ∈ Ck+2,α(Q(t))
satisfaciendo ‖u− u1‖Ck+2,α
(Q(t)
) < δ y F(u) = f . Además, eligiendo u1 = F (x, t, 0, 0, 0)t,
se tiene que F(u1) tiende a cero cuando t va a cero. De hecho, existe un t0 > 0 tal que‖F(u1)‖
Ck,α(Q(t0)
) < δ. Esto implica que la ecuación F(u) = 0 es resoluble.
Para el caso u0 6= 0 procedemos como sigue: si u es una solución de ut = F (x, t, u, ux, uxx) conu∣∣t=0
= u0 entonces v = u−u0 es una solución de vt = F (x, t, u−u0, ux−u0x, uxx−u0xx) =
G(x, t, v, vx, vxx) con v|t=0 = 0. Por otro lado, si v es una solución de vt = F (x, t, v, vx, vxx)
con v∣∣t=0
= 0 entonces u = v+u0 es una solución de ut = F (x, t, u−u0, ux−u0x, uxx−u0xx) =
G(x, t, u, ux, uxx) con u|t=0 = u0. Con esto hemos comprobado que la ecuación (4.1) tienesolución y la prueba está completa.
24

4.2 Existencia de Soluciones a Corto Plazo para el CSF
4.2. Existencia de Soluciones a Corto Plazo para el CSF
Sea k1 un entero positivo y sea α ∈ (0, 1]. Consideremos el flujo de acortamiento∂γ∂t = κN
γ∣∣t=0
= γ0
, 4.3
donde γ0 es una curva embedded en Ck1,α(S1), y κ(·, t) y N(·, t) son respectivamente lacurvatura y el normal unitario a la curva γ(·, t).
Proposición 4.1. Consideremos el problema de valor inicial
∂γ
∂t= κN +G(γ, t)T, 4.4
donde G es una función diferenciable y acotada. Sea γ una solución de la ecuación (4.4).Entonces existe una función diferenciable ϕ : S1 × [0, T )→ S1 tal que γ1(·, t) = γ(ϕ(·, t), t) esuna solución de la ecuación (4.3).
Demostración.Tenemos que
∂γ1
∂t(u, t) = γu(ϕ(u, t), t)ϕt(u, t) + γt(ϕ(u, t), t)
= γu(ϕ(u, t), t)ϕt(u, t) + κN +G(γ, κ)T.
Luego si γ1 satisface la ecuación (4.3), entonces ϕ debe resolver la ecuación
ϕt(u, t) = −G(γ(ϕ(u, t), t), κ(ϕ(u, t), t))
|γu(ϕ(u, t), t)|. 4.5
Esta es una ecuación diferencial de primer orden de parámetro u. Por la teoría estándar deEDO’s, la ecuación (4.5) tiene una solución única ϕ : S1 × [0, T )→ S1.
La proposición 4.1 implica el siguiente corolario, que dice que para encontrar una solucióndel flujo dado por la ecuación (4.3) necesitamos resolver la ecuación
⟨∂γ∂t , N
⟩= κ.
Corolario 4.2. Si γ satisface⟨∂γ∂t , N
⟩= κ, entonces puede ser reparametrizada a una solución
del flujo de acortamiento de la ecuación (4.3).
Gracias a este corolario, podemos ahora considerar el siguiente problema de valor inicial ⟨∂γ∂t , N
⟩= κ
γ∣∣t=0
= γ0
. 4.6
Supongamos que tenemos una solución γ : S1 × [0, T ) → R2 que satisfaga ecuación (4.6) ypara t pequeño podemos expresar γ como
γ(u, t) = γ0(u) + σ(u, t)N0(u),
25

Capítulo 4. Existencia y Unicidad de Soluciones a Corto Plazo
donde N0 es el normal unitario a γ0.Por simplicidad suponemos que γ0 está parametrizada por longitud de arco. Entonces
κ =
⟨∂γ
∂t,N
⟩=
⟨∂σ
∂tN0, N
⟩=∂σ
∂t〈N0, N〉 .
Luego∂σ
∂t=
κ
〈N0, N〉. 4.7
Si σ es una solución de la ecuación (4.7), entonces γ(·, t) = γ0(·) + σ(·, t)N0(·) satisface laecuación (4.6). En efecto,⟨
∂γ
∂t,N
⟩=
⟨∂σ
∂tN0, N
⟩=∂σ
∂t〈N0, N〉 =
κ
〈N0, N〉〈N0, N〉 = κ.
Calculamos ahora el tangente unitario T (·, t), el normal unitario N(·, t), la curvatura κ(·, t) deγ(·, t), así como el producto 〈N0, N〉:
T =(1− κ0σ)T0 + σuN0
[(1− κ0σ)2 + σ2u]1/2
,
N =(1− κ0σ)N0 − σuT0
[(1− κ0σ)2 + σ2u]1/2
,
κ =(1− κ0σ)σuu + 2κ0σ
2u + κ0uσσu − 2κ2
0σ + κ30σ
2 + κ0
[(1− κ0σ)2 + σ2u]3/2
,
〈N0, N〉 =1− κ0σ
[(1− κ0σ)2 + σ2u]1/2
,
4.8
donde κ0 es la curvatura de γ0 y T0 es el tangente unitario de γ0.Sustituyendo κ y 〈N0, N〉 en la ecuación (4.7), se obtiene
∂σ
∂t=
(1− κ0σ)σuu + 2κ0σ2u + κ0uσσu − 2κ2
0σ + κ30σ
2 + κ0
(1− κ0σ)[(1− κ0σ)2 + σ2u]
=σuu + (1− κ0σ)−1(2κ0σ
2u + κ0uσσu − 2κ2
0σ + κ30σ
2 + κ0)
(1− κ0σ)[(1− κ0σ)2 + σ2u]
.
4.9
Si t es pequeño, σ y σu están acotados. En otras palabras, existe un t0 > 0 tal que |σ| ≤ 1(2κ0max)
y |σu| ≤ 1(2κ0max) para los t ∈ [0, t0]. Entonces,
(1− κ0σ)2 + σ2u ≤ 1 + 2|σ||κ0|+ κ0σ
2 + σ2u ≤ 4 +
1
(2κ0max)2.
Por tanto, 1(1−κ0σ)2+σ2
u≥ 1
4+1/(2κ0max)2> 0. Esto significa que la ecuación (4.9) es una
ecuación en derivadas parciales uniformemente parabólica, de manera que es directa laaplicación del teorema 4.4. De esta forma, hemos probado el siguiente teorema.
Teorema 4.5 (Existencia Local para el CSF). Sea γ0 una curva embedded en Ck1+2,α(S1).Entonces el flujo de acortamiento de curvas
∂γ
∂t= κN 4.10
26

4.2 Existencia de Soluciones a Corto Plazo para el CSF
tiene una solución γ en Ck1+2,α(S1 × (0, t0)) tal que para cada t ∈ [0, t0), la curva γ(·, t) esembedded y γ(·, 0) = γ0(·).
27

Existencia de Soluciones a Largo PlazoCapítulo 5: Existencia de Soluciones a Largo Plazo
En estas sección nos centramos en curvas convexas en el plano. Para este caso particularveremos que el proceso de evolución por curvatura media es equivalente al PVI de cierta ecuaciónparabólica no lineal. Después mostraremos la existencia de estimaciones a priori basadas en lacurvatura y sus derivadas, que son utilizadas para establecer la existencia de soluciones a largoplazo de dicha ecuación. Utilizaremos todo ello para probar que las curvas convexas se reducena puntos en el proceso de evolución con el cual trabajamos.
5.1. Problema equivalente para curvas convexas
Para las curvas convexas nos va a ser conveniente utilizar como parámetro el ángulo θ deltangente. Escribimos la curvatura κ = κ(θ) en términos de este parámetro y vamos a determi-nar qué tipo de funciones positivas y 2π-periódicas surgen como curvatura de las curvas convexas.
Lema 5.10. Una función positiva, 2π-periódica representa la curvatura de una curva plana, C2,cerrada, simple y estrictamente convexa si y sólo si∫ 2π
0
cos θ
κ(θ)dθ =
∫ 2π
0
sin θ
κ(θ)dθ = 0.
Demostración.⇒)
Tomando s como parámetro de longitud de arco y suponiendo que 0 ≤ s ≤ L, podemos describirparamétricamente una curva plana con (x(s), y(s)).Por ser la curva cerrada se tiene que,∫ L
0x′(s) ds =
∫ L
0y′(s) ds = 0.
Como x′(s) = cos θ e y′(s) = sin θ, entonces las expresiones anteriores quedan∫ 2π
0
cos θ
κ(θ)dθ =
∫ 2π
0
sin θ
κ(θ)dθ = 0.
⇐)
Por lo visto antes, podemos escribir la ecuación de una curva como∫ L
0x′(s) ds =
∫ 2π
0
cos θ
κ(θ)dθ,
∫ L
0y′(s) ds =
∫ 2π
0
sin θ
κ(θ)dθ.
De forma que vamos a escribir las ecuaciones respecto de el parámetro θ como
x(θ) =
∫ θ
0
cos τ
κ(τ)dτ,
29

Capítulo 5. Existencia de Soluciones a Largo Plazo
y(θ) =
∫ θ
0
sin τ
κ(τ)dτ.
En primer lugar, comprobemos que esta curva tiene la curvatura apropiada. Para ello, calculamos|x′(θ)y′′(θ)−x′′(θ)y′(θ)|
(x′(θ)2+y′(θ)2)3/2.
x′(θ) =cos θ
κ(θ)x′′(θ) =
− sin(θ)κ(θ)− cos(θ)κ′(θ)
κ(θ)2,
y′(θ) =sin θ
κ(θ)y′′(θ) =
cos(θ)κ(θ)− sin(θ)κ′(θ)
κ(θ)2.
Es claro que |x′(θ)y′′(θ)− x′′(θ)y′(θ)| = 1κ(θ)2
y (x′(θ)2 + y′(θ)2)3/2 =(
1κ(θ)2
)3/2, obteniendo
así que la curvatura de la curva es κ(θ).A continuación observamos que la curva es cerrada. Esto viene de observar las ecuacionesx(θ), y(θ) que describen la curva y el hecho de que ésta debe ser 2π-periódica, cosa queobtenemos automáticamente utilizando que κ también lo es.Por otro lado, es obvio que la curva es estrictamente convexa pues κ > 0 por hipótesis.Mostramos por último que la curva es simple. Consideramos la aplicación de Gauss de la curvaN : C → S1, que asigna un vector normal unitario a cada punto de la curva. Como la curvaes estrictamente convexa, se tiene que N es inyectiva. Además, por ser κ > 0 (en particulardistinta de cero en todo punto), N es biyectiva. De este hecho se extrae claramente que lacurva no tiene autointersecciones y, por tanto, que es simple.
Como queremos determinar la evolución de la curvatura expresada mediante el parámetroθ, vamos a considerar también el parámetro τ = t y las coordenadas (θ, τ) en lugar de lashabituales hasta ahora (u, t). Lo primero que observamos es que ∂
∂t 6=∂∂τ , pues
∂∂t es la derivada
temporal para u fijo mientras que ∂∂τ lo es respecto de θ fijo. Se obtiene la siguiente ecuación
de evolución de κ respecto de τ y θ.
Lema 5.11.∂κ
∂τ= κ2∂
2κ
∂θ2+ κ3. 5.1
Demostración.Por la regla de la cadena se tiene que,
∂κ
∂t=∂κ
∂θ
∂θ
∂t+∂κ
∂τ
∂τ
∂t=∂κ
∂τ+∂κ
∂θ
∂κ
∂s=∂κ
∂τ+ κ
(∂κ
∂θ
)2
.
Por otro lado,
∂2κ
∂s2=
∂
∂s
∂κ
∂s= κ
∂
∂θ
∂κ
∂s= κ
∂
∂θ
(∂κ
∂θ
∂θ
∂s
)= κ2∂
2κ
∂θ2+ κ
(∂κ
∂θ
)2
,
donde hemos utilizado que κ ∂∂θ = ∂
∂s y que ∂θ∂t = ∂κ
∂s .Sustituyendo las expresiones obtenidas antes en la ya conocida fórmula ∂κ
∂t = ∂2κ∂s2
+κ3 se obtieneel resultado.
30

5.1 Problema equivalente para curvas convexas
Observación 2. En adelante se hace uso exclusivamente de esta ecuación, por lo que nonecesitamos más el uso dual de τ y t. Utilizaremos t por simplicidad.
Teorema 5.6. El proceso de acortamiento de curvas (CSF) para el caso de curvas convexas esequivalente al problema de EDP’s siguiente:Encontrar κ : S1 × [0, T )→ R satisfaciendo,
1. κ ∈ C2+α,1+α(S1 × [0, T − ε]) para todo ε > 0.
2. ∂κ∂t = κ2 ∂2κ
∂θ2+ κ3.
3. κ(θ, 0) = φ(θ) donde φ cumple:
a) φ ∈ C1+α(S1).
b) φ(θ) > 0.
c)∫ 2π
0cos θφ(θ) dθ =
∫ 2π0
sin θφ(θ) dθ = 0.
Demostración.⇒)
Al expresar la función curvatura de la curva convexa respecto del parámetro θ, por lema 5.10 yla ecuación (5.1), se sigue la implicación.⇐)
Por 1., κ es diferenciable en S1, y por tanto se sigue que es 2π-periódica. Con esto, si tomamosf(t) =
∫ 2π0
cos θφ(θ,t) dθ y g(t) =
∫ 2π0
sin θφ(θ,t) dθ, vemos que f(0) = g(0) = 0 y f ′(t) = g′(t) = 0,
utilizando 2. Por lo tanto,∫ 2π0
cos θφ(θ,t) dθ =
∫ 2π0
sin θφ(θ,t) dθ = 0 para todo t ≥ 0 y concluimos que las hipótesis del
lema 5.10 se cumplen para todo t.Sean ahora las correspondientes curvas definidas por esas fórmulas, es decir, X(θ, t) =
(x(θ, t), y(θ, t)) con
x(θ, t) =
∫ θ
0
cos τ
κ(τ, t)dτ,
y(θ, t) =
∫ θ
0
sin τ
κ(τ, t)dτ.
Estas curvas satisfacen la ecuación de evolución
∂X
∂t= kN − ∂κ
∂θT
La parcial con respecto a t se toma manteniendo θ fijo. Al cambiar la variable espacial se puedeeliminar la componente tangencial, sin que la forma de las curvas cambie. Al escribir θ = θ(u, t)
se puede elegir una reparametrización para cada t, de forma que las curvas reparametrizadassatisfagan el flujo
∂X
∂t= kN.
31

Capítulo 5. Existencia de Soluciones a Largo Plazo
5.2. La propiedad de convexidad se preserva bajo el flujo
Veamos a continuación que las curvas estrictamene convexas siguen siéndolo bajo la evolución.
Lema 5.12. Si κ es solución del problema planteado en el teorema anterior, entonces
κmin(t) = ınfκ(θ, t)|0 ≤ θ ≤ 2π
es no decreciente.
Demostración.Sea ε satisfaciendo κmin(0) > ε > 0 y supongamos que κmin(t) = κmin(0)− ε para cierto t.Sea t0 = ınft|κmin(t) = κmin(0)− ε.La continuidad de κ asegura que el mínimo se alcanza para cierto (θ0, t0). En este puntoκ(θ0, t0) ≤ κ(θ, t), ∀t ∈ [0, t0], por lo que
∂κ
∂t(θ0, t0) ≤ 0,
∂2κ
∂θ2≥ 0.
5.2
Además,κ(θ0, t0) = κmin(t0) = κmin(0)− ε > 0
Esto contradice el hecho de que κ satisfaga la fórmula del punto 2. en teorema 5.6.
5.3. Estimaciones a priori para curvas convexas
Pasamos ahora a establecer estimaciones sobre la curvatura de curvas convexas. Introducimospara ello la curvatura mediana κ∗ de una curva, definida como
κ∗ = supm | κ(θ) > m en cierto intervalo de longitud π.
En relación a κ∗ se obtienen las siguientes estimaciones para familias de curvas satisfaciendo laecuación de evolución.
Proposición 5.2 (Estimación geométrica). Si κ(θ, t) es la curvatura de una curva plana, cerraday convexa la cual encierra un área A y tiene longitud L, entonces κ∗(t) < L
A . En particular, κ∗
está acotada.
Demostración.Tomamos M < κ∗(t) y trasladamos nuestro dominio de forma que κ(θ, t) > M en (0, π).Escribimos la coordenada y de la curva,
y(θ) =
∫ θ
0
sin(τ)
κ(τ)dτ
de forma que
y′(θ) =sin(θ)
κ(θ).
32

5.3 Estimaciones a priori para curvas convexas
Es claro que en π y 0, y′ se anula, luego los tangentes a la curva son horizontales y la curva seencuentra entre dos rectas paralelas. También vemos que la distancia de estas rectas es
y(π)− y(0) =
∫ π
0
sin(τ)
κ(τ)dτ ≤ 1
M
∫ π
0sin(τ) dτ =
2
M.
Además, es fácil comprobar que el diámetro está acotado por L2 y el área A por la amplitud de
la curva multiplicado por el diámetro, de forma que
A ≤ 2
M· L
2=
L
M⇒ M ≤ L
A.
Como L es decreciente y A y es acotada más allá de 0, tenemos que M está acotada. ComoM se puede elegir arbitrariamente cerca de κ∗(t), se tiene el resultado.
Ahora podemos controlar la integral de la curvatura en términos de κ∗. Vamos a enunciarantes una versión de la desigualdad de Wirtinger que utilizaremos en la siguiente prueba.
Proposición 5.3 (Desigualdad de Wirtinger (primera versión)). Si f(a) = f(b) = 0 conb− a ≤ π, entonces ∫ b
af2 dθ ≤
∫ b
a
(df
dθ
)2
dθ
Proposición 5.4 (Estimación integral). Si κ∗(t) está acotada en [0, T ), entonces∫ 2π
0 log κ(θ, t) dθ
está acotada en [0, T ).
Demostración.Calculamos
∂
∂t
∫ 2π
0log κ(θ, t) dθ =
∫ 2π
0
1
κ
∂κ
∂tdθ
=
∫ 2π
0κ∂2κ
∂θ2+ κ2 dθ
=
∫ 2π
0κ2 dθ −
∫ 2π
0
(∂κ
∂θ
)2
dθ,
5.3
donde hemos utilizado la ecuación de evolución, integración por partes y el hecho de que tantoκ como su derivada respecto θ son 2π-periódicas.Fijamos ahora t y consideramos los conjuntos U = θ | κ(θ, t) > κ∗(t) y V = S1 \ U .El conjunto U es abierto, por lo que se puede expresar como unión numerable de intervalosdisjuntos que, por la definición de κ∗, son de longitud menor o igual que π.Utilizando la continuidad de κ se ve que en los extremos de los intervalos de U el valor de κ(θ, t)
coincide con κ∗(t), por lo que podemos aplicar la desigualdad de Wirtinger (proposición 5.3) a
33

Capítulo 5. Existencia de Soluciones a Largo Plazo
la función κ(θ, t)−κ∗(t). Denotando por Ii a la clausura de los intervalos de U , obtenemos que∫I i
(κ(θ, t)− κ∗(t))2 dθ ≤∫I i
(∂κ
∂θ
)2
dθ,∫I iκ(θ, t)2 + κ∗(t) dθ − 2κ∗(t)
∫I iκ(θ, t) dθ ≤
∫I i
(∂κ
∂θ
)2
dθ,∫I iκ(θ, t)2 −
(∂κ
∂θ
)2
dθ ≤ 2κ∗(t)
∫I iκ(θ, t) dθ −
∫I iκ∗(t) dθ ≤ 2κ∗(t)
∫I iκ(θ, t) dθ.
5.4
Sumando sobre todos los intervalos que conforman U∫Uκ(θ, t)2 −
(∂κ
∂θ
)2
dθ ≤ 2κ∗(t)
∫Uκ(θ, t) dθ ≤ 2κ∗(t)
∫ 2π
0κ(θ, t) dθ.
Por otro lado, en V∫Vκ(θ, t)2 −
(∂κ
∂θ
)2
dθ ≤∫Vκ(θ, t)2 dθ ≤ (κ∗(t))2
∫ 2π
0dθ = 2π(κ∗(t))2.
Sumando estas estimaciones y recordando que ∂L∂t = −
∫κ2ds = −
∫κdθ,
∂
∂t
∫ 2π
0log κ(θ, t) dθ =
∫ 2π
0κ(θ, t)2 −
(∂κ
∂θ
)2
dθ
≤ 2π(κ∗(t))2 + 2κ∗(t)
∫ 2π
0κ(θ, t) dθ
= 2π(κ∗(t))2 − 2κ∗(t)
(∂L
∂t
).
5.5
Como κ∗(t) ≤M por se acotado, integrando∫ 2π
0log κ(θ, t) dθ −
∫ 2π
0log κ(θ, 0) dθ
≤ 2π
∫ t
0(κ∗(t))2 dt− 2
∫ t
0κ∗(t)
(∂L
∂t
)dt
≤ 2πM2t− 2M(L(t)− L(0)).
5.6
De aquí se llega a que∫ 2π
0log κ(θ, t) dθ ≤
∫ 2π
0log κ(θ, 0) dθ + 2πM2t+ 2M(L(0)− L(t)),
donde todos los términos del lado derecho son acotados en [0, T ), y hemos terminado.
Lema 5.13. Si∫
log κ(θ, t)dθ está acotada en [0, T ), entonces ∀ δ > 0 existe C tal queκ(θ, t) ≤ C, salvo en intervalos de longitud menor o igual que δ.
Demostración.
34

5.3 Estimaciones a priori para curvas convexas
Si fuera κ(θ, t) ≥ C en a ≤ θ ≤ b tal que b− a ≥ δ, entonces∫ 2π
0log κ(θ, t) dθ ≥ δ logC + (2π − δ) log κmin(0),
donde κmin(0) = ınfκ(0) : 0 ≤ θ ≤ 2π es una cota inferior de κ, por lema 5.12. En particularestá acotado. El lado izquierdo también está acotado por hipótesis, lo que da una contradiccióncuando C es grande.
Lema 5.14. Podemos encontrar una constante D tal que∫ 2π
0
(∂κ
∂θ
)2
dθ ≤∫ 2π
0κ2 dθ +D,
para 0 ≤ t < T .
Demostración.Integrando por partes, utilizando la ecuación (5.1) y que tanto κ como sus derivadas espacialesson 2π-periódicas obtenemos
∂
∂t
∫ 2π
0κ2 −
(∂κ
∂θ
)2
dθ =
∫ 2π
02κ∂κ
∂t− 2
(∂κ
∂θ
)(∂2κ
∂θ ∂t
)dθ
= 2
∫ 2π
0
∂κ
∂t
(κ+
∂2κ
∂θ2
)dθ
= 2
∫ 2π
0
(κ2∂
2κ
∂θ2+ κ3
)(κ+
∂2κ
∂θ2
)dθ
= 2
∫ 2π
0κ2
(κ+
∂2κ
∂θ2
)2
dθ
≥ 0,
5.7
Integrando respecto de t, aparece la constante buscada.
Ya estamos en disposición de probar la última de las estimaciones fundamentales.
Proposición 5.5 (Estimación puntual). Si∫ 2π
0 log κ(θ, t) dθ está acotada en [0, T ), entoncesκ(θ, t) está uniformemente acotada en S1 × [0, T ).
Demostración.Por lema 5.13 tenemos que κ(θ, t) ≤ C excepto en intervalos [a, b] con b − a < δ. En estosintervalos:
κ(ε) = κ(a) +
∫ ε
a
∂κ
∂θdθ ≤ κ(a) +
√δ
(∫ (∂κ
∂θ
)2
dθ
)1/2
≤ C +√δ
(∫ (∂κ
∂θ
)2
dθ
)1/2
≤ C +√δ
(∫κ2dθ +D
)1/2
,
5.8
donde hemos utilizado lema 5.14 en el último paso.
35

Capítulo 5. Existencia de Soluciones a Largo Plazo
Si consideramos ahora κmax, el máximo valor de κ, entonces
κmax ≤ C +√δ(2πκ2
max +D)1/2 ≤ C + 2π
√δκmax +
√δ ·D.
Tomando δ suficientemente pequeño (podemos hacerlo, pues es arbitrario) acotamos κmax ytenemos la cota uniforme.
Gracias a este conjunto de resultados, el siguiente teorema se prueba con facilidad.
Teorema 5.7. Si κ : S1 × [0, T )→ R satisface las condiciones del teorema 5.6 y el área queencierran las curvas asociadas está acotada más allá del cero, entonces κ está uniformementeacotada en S1 × [0, T ).
Demostración.Como L decrece durante la evolución (lema 2.2), la cota inferior del área junto con la estimacióngeométrica (proposición 5.2) aseguran una cota superior para κ∗(t), que tiene como consecuenciapor las estimaciones integral y puntual (proposición 5.4, proposición 5.5) la cota uniforme paraκ(θ, t).
5.4. Cotas de las derivadas de orden superior de κ
Una vez tenemos la acotación para κ, vamos a utilizar esta información para obtenercotas en todas las derivadas de κ. Esto es lo que nos permitirá asegurar la no existencia desingularidades en el flujo de las curvas convexas.Comenzamos obteniendo una cota para la derivada primera de la curvatura.
Lema 5.15. Si κ está acotada, entonces ∂κ∂θ está acotada.
Demostración.Calculamos
∂2κ
∂θ ∂t=
∂
∂θ(κ2∂
2κ
∂θ2+ κ3) = 2κ
∂κ
∂θ
∂2κ
∂θ2+ κ2∂
3κ
∂θ3+ 3κ2∂κ
∂θ.
Veamos que esto implica que ∂κ∂θ crece como mucho exponencialmente.
Sea F (θ, t) = eαt ∂κ∂θ . Derivando,∂F∂t = αeαt ∂κ∂θ + eαt ∂
2κ∂θ ∂t , de lo que se obtiene
∂F
∂t= eαt
(α∂κ
∂θ+ 2κ
∂κ
∂θ
∂2κ
∂θ2+ κ2∂
3κ
∂θ3+ 3κ2∂κ
∂θ
). 5.9
Vamos a reescribir la última expresión en términos de F , en lugar de κ, en la medida de loposible.Como ∂κ
∂θ = e−αtF , derivando conseguimos también las expresiones de ∂2κ∂θ2
y ∂3κ∂θ3
para sustituirlasen las expresión de la ecuación (10.15):
∂F
∂t= κ2∂F
∂θ2 + 2κ
(∂F
∂θ
)2
+ (α+ 3κ2)F. (ecuación parabólica para F )
Como κ está acotada, se puede elegir α tal que α + 3κ2 ≤ 0 y entonces el principio delmáximo nos dice que F alcanza su máximo en la frontera, esto es, en el tiempo inicial (la
36

5.4 Cotas de las derivadas de orden superior de κ
variable θ es 2π-periódica, luego no hay frontera espacial). Así,
∂κ
∂θ≤ e−αt t=0
supF = e−αtt=0sup
∂κ
∂θ,
de forma que ∂κ∂θ crece como mucho exponencialmente.
Por tanto, en un intervalo de tiempo finito, ∂κ∂θ permanece acotado.
Por simplicidad en la notación, escribimos en adelante k′
= ∂κ∂θ . Con los cálculos de los
siguientes lemas, conseguiremos una cota para la segunda derivada de la curvatura. Previamente,enunciamos dos desigualdades que utilizaremos en varias ocasiones de aquí en adelante.
Proposición 5.6 (Desigualdades de Peter-Paul [Pay Peter for the privilege of robbing Paul). ]Para todo positivo ε, 2ab ≤ a2
ε + εb2 y ab ≤ εa2 + b2
4ε .
Lema 5.16. Si κ′y κ
′′están acotadas, entonces
∫ 2π0 (κ
′′)4dθ está acotada.
Demostración.Calculamos integrando por partes, utilizando la ecuación (5.1) y que tanto κ como sus derivadasespaciales son 2π-periódicas:
∂
∂t
∫ 2π
0(κ′′)4 = 4
∫ 2π
0(k′′)3 ∂
∂t(κ′′)
= 4
∫ 2π
0(κ′′)(κ2κ
′′+ κ3)
′′
= −12
∫ 2π
0(κ′′)2(κ
′′′)(3κ2κ
′+ 2κκ
′κ′′
+ κ2κ′′′
)
= −12
∫ 2π
0κ2(κ
′′)2(κ
′′′)2 + 2κκ
′(κ′′)3κ
′′′+ 3κ2κ
′(κ′′)2κ
′′′.
5.10
Vamos a aplicar ahora la proposición 5.6, para acotar el segundo y tercer términos por el primeroy ciertos términos añadidos que vamos a obtener. La idea es que tenemos un término negativo,−12
∫ 2π0 κ2(κ
′′)2(κ
′′′)2, en el lado derecho, del cual queremos aprovecharnos. Por tanto, nos
interesa contrarrestar el término κκ′′κ′′′. Para el segundo término, escribimos
2κκ′(κ′′)3(κ
′′′) = 2
(κκ′′κ′′′)(
κ′(κ′′)2)≤ ε
(κκ′′κ′′′)2
+1
ε(κ′(κ′′)2)2.
De forma similar para el último término,
3κ2κ′(κ′′)2κ
′′′= 3
(κκ′′κ′′′)(
κκ′κ′′)≤ 3
2
(δ(κκ′′κ′′′)2
+1
δ
(κκ′κ′′)2).
Entonces, tomando ε, δ pequeños de forma que −12 elimine los términos, se llega a que
∂
∂t
∫ 2π
0(κ′′)4 ≤
∫ 2π
0C1(κ
′)2(κ
′′)4 + C2κ
2(κ′)2(κ
′′)2.
Utilizando ahora la hipótesis de acotación de κ y κ′y el hecho de que (por desigualdad de
37

Capítulo 5. Existencia de Soluciones a Largo Plazo
Hölder) ∫ 2π
0(κ′′)2 ≤
√2π
(∫ 2π
0(κ′′)4
)1/2
,
tenemos que∂
∂t
∫ 2π
0(κ′′)4 ≤ C3
∫ 2π
0(κ′′)4 + C4
(∫ 2π
0(κ′′)4
)1/2
,
que nos hace ver que ∂∂t
∫ 2π0 (κ
′′)4 crece como mucho exponencialmente y, por tanto, es finito
en intervalos de tiempo finitos.
Lema 5.17. Si κ′, κ′′y∫ 2π
0 (κ′′)4dθ están acotadas, entonces
∫ 2π0 (κ
′′′)2dθ también lo está.
Demostración.Con las mismas técnicas que antes,
∂
∂t
∫ 2π
0(κ′′′
)2 = 2
∫ 2π
0(κ′′′
)(κ2κ′′
+ κ3)′′′
= −2
∫ 2π
0κ′′′′
(κ2κ′′
+ κ3)′′
= −2
∫ 2π
0κ2(κ
′′′′)2 + 4κκ
′κ′′′κ′′′′
+ 2κ(κ′′)2κ
′′′′
+ 2(κ′)2κ
′′κ′′′′
+ 3κ2κ′′κ′′′′
+ 6κ(κ′)2κ
′′′′.
5.11
De forma similar a lo hecho en el lema anterior, vamos a acotar los últimos 5 términos por elprimero y ciertos términos adicionales. Escribimos,
4κκ′κ′′′κ′′′′
=4(κκ′′′′)(
κ′κ′′′)≤ 2
(1
ε1(κ′κ′′′
)2 + ε1(κκ′′′′
)2
),
2κ(κ′′)2κ
′′′′=2(κκ′′′′)(
(κ′′)2)≤ 1
ε2(κ′′)4 + ε2(κκ
′′′′)2,
2(κ′)2κ
′′κ′′′′
=2(κκ′′′′)(1
κ(κ′)2κ
′′)≤
((κ′)4(κ
′′)2
ε3κ2+ ε3(κκ
′′′′)2
),
3κ2κ′′κ′′′′
=3(κκ′′′′)(
κκ′′)≤ 3
2
(1
ε4(κκ
′′)2 + ε3(κκ
′′′′)2
),
6κ(κ′)2κ
′′′′=6(κκ′′′′)(
(κ′)2)≤ 3
(1
ε5(κ′)4 + ε5(κκ
′′′′)2
),
5.12
y llegamos a que
∂
∂t
∫ 2π
0(κ′′′
)2 ≤ C1
∫ 2π
0(κ′)2(κ
′′′)2 + C2
∫ 2π
0(κ′′)4
+ C3
∫ 2π
0
(κ′)4(κ
′′)2
κ2+ C4
∫ 2π
0κ2(κ
′′)2 + C5
∫ 2π
0(κ′)4.
5.13
Todos los términos de la derecha los podemos acotar, salvo el primero que es una constante multi-plicada por
∫ 2π0 (κ
′′′)2, de forma que vemos que
∫ 2π0 (κ
′′′)2 crece como mucho exponencialmente,
de forma que es finito en tiempos en intervalos de tiempo finitos.
38

5.4 Cotas de las derivadas de orden superior de κ
Ya estamos en disposición de obtener la cota para κ′′.
Corolario 5.3. Bajo las mismas hipótesis que antes, κ′′está acotada.
Demostración.En una dimensión se cumple la desigualdad max|f |2 ≤ C
∫|f ′ |2 + f2. Aplicando a κ
′′:
max|κ′′ |2 ≤ C∫|κ′′′ |2 + (κ
′′)2.
Por las hipótesis, utilizando los resultados anteriores, el lado derecho de está acotado y tenemosla prueba.
Obtenemos por último acotación para κ′′′
y las derivadas de orden superior.
Lema 5.18. Si κ, κ′y κ
′′están uniformemente acotadas, también lo están κ
′′′y todas las
derivadas de orden superior.
Demostración.Calculamos
∂
∂tκ′′′
= (κ2κ′′
+ κ3)′′′
= (κ2κ′′′′
+ 4κκ′κ′′′
+ 2κ(κ′′)2 + 2(κ
′)2κ
′′+ 3κ2κ
′′+ 6κ(κ
′)2)′
= κ2κ(v) + 6κκ′κ′′′′
+ (6(κ′)2 + 8κκ
′′+ 3κ2)κ
′′′+ (6κ
′(κ′′)2 + 18κκ
′κ′′
+ 6(κ′)3).
5.14
Como κ, κ′y κ
′′están uniformemente acotados, podemos aplicar el principio del máximo a
κ′′′eαt para un α apropiado.
Sea F (θ, t) = eαt ∂3κ∂θ3
y ∂F∂t = αeαt ∂
3κ∂θ3
+ eαt ∂4κ∂t∂θ3
, de donde
∂F
∂t= eαt
(κ2κ(v) + 6κκ
′κ′′′′
+ (6(κ′)2 + 8κκ
′′+ 3κ2 + α)κ
′′′+ 6κ
′(κ′′)2 + 18κκ
′κ′′
+ 6(κ′)3).
5.15Como κ
′′′= e−αtF , derivando conseguimos también las expresiones de κ
′′′′y κ(v) para sustituirlas
en las expresión de ecuación (5.15):
∂F
∂t= κ2∂F
∂θ2 + 6κκ
′ ∂F
∂θ+ (6(κ
′)2 + 8κκ
′′+ 3κ2 +α)F + eαt(6κ
′(κ′′)2 + 18κκ
′κ′′
+ 6(κ′)3).
Entonces, el principio del máximo nos dice que F alcanza su máximo en t = 0. Así,
κ′′′ ≤ e−αt t=0
supF = e−αtt=0supκ
′′′,
de forma que κ′′′
crece como mucho exponencialmente y por tanto está acotada en intervalosfinitos de tiempo.En general, por el mismo procedimiento, si κ, κ
′, . . . , κ(n−1) están acotadas, entonces
∂
∂tκ(n) ≤ κ2κ(n+2) + 2nκκ
′κ(n+1) + Cκ(n) + C,
39

Capítulo 5. Existencia de Soluciones a Largo Plazo
y se llega a que κ(n) está acotada en intervalos finitos.
Hemos conseguido el objetivo de encontrar cotas para las derivadas de κ en todos susórdenes, por lo tanto en el problema de evolución para curvas convexas propuesto en elteorema 5.6 no surgen singularidades. Esto nos lleva al siguiente resultado, el cual culmina eltrabajo de este capítulo.
Teorema 5.8. La solución al problema equivalente al CSF propuesto en el teorema 5.6 continúahasta que el área se hace cero.
Demostración.Siempre que el área esté acotada más allá de cero, tenemos cotas para κ y todas sus derivadasespaciales. Utilizando la ecuación (5.1) de evolución podemos acotar también las derivadastemporales.Además, supongamos que existe una solución en el intervalo [0, T ) pero que el área no llegase aser cero: lımt→T A(t) > 0. Entonces κ tiene un límite cuando t→ T , el cual es C∞ y podemosextender esta solución más allá de T . La solución κ de la ecuación (5.1) se puede convertir enuna solución de la ecuación del calor para curvas utilizando el lema 5.10.
40

III
Circularidad Asintótica


Las Curvas Convexas se Reducen a PuntosCapítulo 6: Las Curvas Convexas se Reducen a Puntos
Una vez sabemos que en el caso de curvas convexas el área va a cero sin desarrollar ningunasinguralidad bajo la evolución, dedicaremos esta sección a estudiar la forma global de lassoluciones del CSF. En concreto probaremos que las curvas se hacen circulares.En primer lugar veremos que la razón isoperimétrica L2
A decrece, de forma que si A → 0,entonces L→ 0 haciendo que la curva se reduzca a un punto.Comenzamos enunciando la siguiente desigualdad isoperimétrica, conocida como desigualdadde Bonnesen (ver [11]), la cual será extremadamente útil en adelante.
Teorema 6.9 (Desigualdad de Bonnesen). Una curva cerrada y convexa γ en el plano satisface
rL−A− πr2 ≥ 0
para cualquier número r ∈ [rin, rout], donde rin es el radio inscrito, el radio de la circunferenciamás grande contenida dentro de γ, y rout es el radio circunscrito, el radio de la circunferenciamás pequeña que contenga a γ.
Calculamos ahora el valor de la derivada de la razón isoperimétrica.
Lema 6.19. Si una curva cerrada evoluciona siguiendo la ecuación (1), entonces la derivada dela razón isoperimétrica viene dada por
∂
∂t
(L2
A
)= −2
L
A
(∫κ2 ds− πL
A
)Demostración.Vamos a utilizar por supuesto los cálculos hechos en el lema 2.7 y el lema 2.2. Con ello esautomático que
∂
∂t
L2
A= −2
L
A
∫κ2 ds+ 2π
L
A
2
= −2L
A
(∫κ2 ds− πL
A
).
Con el siguiente resultado probamos que, de hecho, la razón L2
A decrece.
Lema 6.20. Una curva cerrada y convexa γ en el plano satisface
πL
A≤∫γκ2 ds.
Demostración.Parametrizamos por X(s) la curva cerrada y convexa γ con s el parámetro de longitud dearco. La cantidad que nos va a permitir aplicar la desigualdad de Bonnesen es la longitud de laproyección de X en su recta tangente, dada por p = − < X,N >. Se obtiene integrando porpartes que∫
γpκ ds = −
∫ L
0< X,κN > ds = −
∫ L
0< X,X
′′> ds =
∫ L
0< T, T > ds = L.
43

Capítulo 6. Las Curvas Convexas se Reducen a Puntos
Por otro lado, aplicando Cauchy-Schwartz, se tiene que
L =
∫γpκ ds ≤
(∫γp2 ds
)1/2(∫γκ2 ds
)1/2
.
De esta forma, la conclusión que buscamos se cumple si probamos que∫γp2 ds ≤ LA
π.
En primer lugar supongamos que la región Ω que acota γ en el plano es simétrica respecto delorigen. Para este tipo de curva la cantidad p se puede controlar, pues la amplitud de la curva enla dirección determinada por N(s) es dos veces la proyección de X en su recta tangente, esdecir 2p. Por la convexidad de γ la amplitud de la curva está en el intervalo [2rin, 2rout], luegop está en el intervalo [rin, rout], en el cual podemos aplicar la desigualdad de Bonnesen:
πp2 ≤ pL−A,
para cada p(s). Integrando y notando que∫p ds = 2A por el teorema de Green, el lado
derecho de la desigualdad queda LA, probando el teorema para curvas convexas cuya regiónacotada Ω es simétrica respecto del origen.Ahora supongamos que Ω es un dominio convexo cualquiera. Afirmamos que Ω puede serbisecado por un segmento que divida el área en partes iguales y se corte con la frontera en dospuntos con tangentes paralelas.La afirmación se basa en el Teorema de los Valores Intermedios. Sea g(s) la función continuatal que s < g(s) < s+L la cual define el lugar a lo largo de γ tal que la recta que pasa por lospuntos X(s) y X(g(s)) biseca el área. Se tiene por tanto que g(g(s)) = s+ L. Consideremosla función continua
h(s) =< (T (s)× T (g(s)), N >,
donde N es el normal positivamente orientado al plano. Es claro que h(s) = 0 si y sólo siT (s) = −T (g(s)).Observamos también que h(0) = −h(g(0)). Si h(0) = 0 entonces s0 = 0 determina la recta.De lo contrario, por el TVI, existe un s0 ∈ (0, g(0)) tal que h(s0) = 0, y s0 determina la recta.Sea ` el segmento de X(s0) a X(g(s0)). Movemos la curva de forma que el punto medio de` sea el origen y llamamos γ1 y γ2 a cada lado generado por ` al dividir Ω. Borramos por un
Figura 6.1: División de Ω por `.
momento γ2 y reflejamos γ1 respecto del origen de forma que obtenemos una curva cerrada y
44

convexa que es simétrica respecto al origen. Observamos que las tangentes en los extremos deγ1 deben ser paralelas pues así es γ1 ∪ (−γ1) convexa. Entonces por el argumento previo
2
∫γ1
p2 ds ≤ 2L1A
π,
donde 2L1 es la longitud de γ1 ∪ (−γ1). Volvemos a considerar γ2 y, de forma análoga,
2
∫γ2
p2 ds ≤ 2L2A
π.
Sumando las dos desigualdades tenemos
2
∫γp2 ds ≤ 2(L1 + L2)A
π=
2LA
π,
la desigualdad buscada para dominios convexos generales.
45


Las Curvas se Vuelven CircularesCapítulo 7: Las Curvas se Vuelven Circulares
Para toda curva cerrada, la desigualdad isoperimétrica dice que su frontera no puede sermás corta que aquella de la circunferencia con misma área encerrada.
L2 ≥ 4πA.
En esta segunda parte vamos a probar que de hecho la razón isoperimétrica estudiada en elcapítulo anterior tiende a 4π a medida que el área encerrada por la curva se acerca a cero.Como consecuencia obtendremos que la curva se vuelve circular, en el sentido de que la razónroutrin
entre el radio circunscrito y el radio inscrito tiende a 1. Lo vemos con los siguientes dosresultados.
Teorema 7.10. Sea γ(t) una familia de curvas convexas evolucionando por el CSF para0 < t < T . Si lımt→T A(t) = 0, entonces la razón isoperimétrica L2
A tiende a 4π.
Demostración.Teniendo que el área va a 0 y que la razón isoperimétrica está acotada inferiormente, es intuitivoa la luz de la evolución que sigue L2
A que la cantidad
L
(∫κ2 ds− πL
A
)debe tender a 0 a lo largo de una subsucesión de tiempos ti tendiendo a T . En efecto, si nofuera así, entonces en cierto δ-entorno de T estaría acotada inferiormente por cierto ε > 0. Sesigue de esto que
∂
∂t
(L2
A
)< −2ε
A= − 2ε
A(0)− 2πt.
Integrando tenemos la razón isoperimétrica, que está acotada inferiormente por 4π (por ladesigualdad isoperimétrica), y acotada superiormente por un múltiplo de log(A(0)− 2πt), quetiende a −∞ cuando t→ T . Contradicción.La idea consiste en explotar esta información obteniendo una medida de circularidad acotadapor la diferencia entre L
∫κ2 ds y πL
2
A . Para este fin, vamos a mejorar nuestra estimación de∫p2 ds. En el capítulo anterior obtuvimos la estimación por integración en la desigualdad de
Bonnesen. Observamos que la función rL−A− πr2 es cóncava, luego está por encima de larecta secante que conecta el grafo en rin y rout. Utilizando esto, se obtiene
rL−A− πr2 ≥ (rinL−A− πr2in) + (r − rin)
((rout − rin)L− π(r2
out − r2in)
rout − rin
)= rinL−A− πr2
in + (r − rin)(L− π(rout + rin))
= rL−A+ πrinrout − πr(rout + rin)
≥ 0
7.1
para r ∈ [rin, rout]. Para curvas convexas con región encerrada simétrica respecto del origen, psatisface esta condición. Integrando y utilizando de nuevo que
∫p ds = 2A, obtenemos una
47

Capítulo 7. Las Curvas se Vuelven Circulares
mejor estimación para la integral de p2:
LA− π∫
p2 ds ≥ LA(
1 +πrinrout
L− 2π(rin + rout)
L
).
Vamos a denotar por F (γ) la expresión entre paréntesis anterior, de forma que∫p2 ds ≥ LA
π(1− F ).
Vemos que si F (γ) = 0 entonces la recta secante está en el eje r. Esto nos dice que la desigualdadde Bonnensen es precisa en rin y rout, de donde se sigue que γ debe ser una circunferencia.Como hicimos antes, aplicamos Cauchy-Schwartz para estimar κ, obteniendo una desigualdadmejor en un facotr de (1− F ):
(1− F )
∫κ2 ds ≥ πL
A.
Reagrupando y multiplicando por L para obtener la información geométrica contenida en F ,tenemos que
L
(∫κ2 ds− πL
A
)≥ FL
∫κ2 ds
≥ FπL2
A
≥ 4π2F
7.2
donde hemos aplicado la desigualdad débil para∫κ2 y la desigualdad isoperimétrica. Por nuestro
resultado previo, F tiende a 0 en una subsucesión de tiempos que se acercan a T . Dado que Fes invariante por reescalamiento del plano, se prueba que (ver [2]) la región que encierra la curvaconvexa normalizada ν(t) =
√πA(t)γ(t) converge al disco unidad. Como la razón isoperimétrica
L2
A es también invariente por reescalamiento, debe converger a 4π.Para extender el resultado a curvas convexas arbitrarias, se utiliza el mismo truco de elección delorigen hecho en el capítulo anterior, es decir, se toma el centro del segmento bisecante elegidotal que los vectores tangentes en sus puntos finales sean paralelos, y se reduce al caso previoreflejando las regiones resultantes sobre este origen.
Corolario 7.4. La razón routrin
converge a 1.
Demostración.Por la desigualdad de Bonnesen y la desigualdad π (rout)
2 > A,
L2
A− 4π ≥ π2(rout − rin)2
A
=π2r2
in
A
(1− rout
rin
)2
≥(
1− routrin
)2
.
7.3
48

El lado izquierdo converge a 0 por el teorema previo, probando así la circularidad asintótica.
49


IV
Convergencia Circular C2 y C∞


Convergencia en Sentido C2Capítulo 8: Convergencia en Sentido C2
La convergencia de routrin
a 1 obtenida en el capítulo anterior se puede considerar como unaconvergencia en el sentido C0 al círculo. Generalizando la definición de κ∗ utilizada en la parteII de este trabajo para que sirva en cualquier intervalo, y obteniendo una estimación geométricamás refinida, se puede también probar que la razón entre el máximo de la curvatura κmax yel mínimo de la curvatura κmin tiende a 1, una convergencia de tipo C2. Vamos a comenzarestudiando esto.Con el primer lema refinamos la estimación geométrica. Sea
κ∗w = supm | κ(θ) > m en algún intervalo de longitud w.
Lema 8.21.κ∗w(t)rin(t) <
1
1−K(w)(rout/rin − 1),
donde rin y rout son como en la sección anterior para la curva convexa definida por κ(·, t), yK(w) es una función positiva y decreciente con K(0) =∞ y K(π) = 0.
Demostración.Sea M < κ∗w(t). El conjunto θ | κ(θ, t) > M contiene un intervalo de longitud al menosw (por la definición de κ∗w y por ser κ∗w > M). Haciendo si fuera necesario un cambio deparámetros, podemos suponer que ese intervalo es
(−w
2 ,w2
).
Si construímos el arco circular con curvatura M , ángulo w y tangente a la curva en θ = 0,vemos que la curva, digamos γ debe de encontrarse en la región acotada por el arco circular ylas rectas tangentes a sus extremos (ver figura 8.1). La hipótesis de convexidad de γ nos asegura
Figura 8.1
que ésta se encuentra dentro de la región que forman las tangentes a θ = 0 (rectas discontinuasen la imagen), mientras que la condición κ(θ) > M en
(−w
2 ,w2
)garantiza que esas rectas están
dentro del “cono” formado por el arco circular y las rectas sólidas que salen de éste.Dado que γ está en la región acotada por este cono y que la circunferencia circunscrita deberodear cada punto de la curva, observamos que para un rin dado el radio rout más pequeñoposible se obtiene cuando se tiene la configuración siguiente (figura 8.2):
53

Capítulo 8. Convergencia en Sentido C2
Gracias a la construcción de la figura 8.2 y utilizando trigonometría básica podemos determinar
Figura 8.2
que |b| = 1/M , que
cos(w
2
)=
1/M
|d|+ 1/M=
rin|a|+ |d|
8.1
y que2rout ≥ rin + |a|.
De esto último, (routrin− 1
)≥ −1
2+|a|
2rin, 8.2
y resolviendo la ecuación (8.1) para |a| se llega a
|a| = rincos(w/2)
− 1
M
(1
cos(w/2)− 1
). 8.3
Sustituyendo ecuación (8.3) en la ecuación (8.2) y reordenando se obtiene
Mrin ≤1
1−K(w)(rout/rin − 1),
donde
K(w) =
(1
2 cos(w/2)− 1
2
)−1
=2 cos(w/2)
1− cos(w/2).
Como M puede elegirse de forma arbitrariamente cerca de κ∗w(t), tenemos el resultado.
Corolario 8.5.κmax(t)rin ≤
(1
1− ε
)1
1− C(ε)(rout/rin − 1),
donde ε es cualquier positivo suficientemente pequeño.
54

Demostración.Por la prueba de la estimación puntual (proposición 5.5) vemos que para cualquier ε > 0, siw/2 < δ entonces κ(θ, t) > (1 − ε)κmax(t) para todo θ ∈ (θ0 − w/2, θ0 + w/2) (donde θ0
viene dado por κmax(t) = κ(θ0, t)). Por tanto, κ∗w(t) ≥ κmax(t)(1− ε) para todo t. Entonces,por el lema anterior,
κmax(t)rin ≤κ∗w(t)rin(1− ε)
≤ 1
(1− ε)1
1−K(w)(rout/rin − 1)=
1
(1− ε)1
1− C(ε)(rout/rin − 1),
con C(ε) = 2 cos(w/2)1−cos(w/2) constante que depende de ε, pues según este valor se toma un δ >
w/2.
Proposición 8.7. Para cualquier positivo ε
κmax(t)rin(t) ≤(
1
1− ε
)2
para todo T suficientemente cercano a T .
Demostración.El resultado se sigue automáticamente del corolario 7.4 y el resultado anterior.
Teorema 8.11. κ(θ, t)rin(t) converge uniformemente a 1.
Demostración.Utilizando las técnicas empleadas en la prueba de la proposición 5.5 se llega a que la familiaκ(θ, t)rin(t) es equicontinua. Que una subsucesión converge uniformemente a una función f(θ)
y f(θ) ≤ 1 se sigue de la estimación previa.Entonces, (κ(θ, ti)rin(ti))
−1 converge puntualmente a f(θ)−1 en los reales extendidos y por ellema de Fatou tenemos que∫
1
f(θ)dθ ≤ lım inf
∫dθ
κ(θ, ti)rin(ti)= lım inf
L(ti)
rin(ti)= 2π.
Por otro lado, 2π ≤∫dθ/f(θ). Por tanto, f(θ) ≡ 1.
Como cada subsucesión convergente converge uniformemente a 1, κ(θ, t)rin(t) converge unifor-memente a 1.
De aquí obtenemos,
Corolario 8.6. κmin(t)κmax(t) converge a 1.
55


Convergencia en Sentido C∞Capítulo 9: Convergencia en Sentido C∞
Por último, extendemos el tipo de convergencia al sentido C∞. Haremos esto utilizandonuevas estimaciones a priori, similares a las obtenidas en la parte II, para las derivadas de ordensuperior de κ que nos permitirán ver su convergencia a 0 y, por tanto, que las curvas convergena círculos también en el sentido C∞.Para determinar la tasa de convergencia de las derivadas de κ resulta más productivo considerarla evolución de la curvatura normalizada k, donde la normalización se toma de forma que lacurva convexa asociada encierre área π. Se define k por
k(θ, t) = κ(θ, t)√
2T − 2t.
En primer lugar, veamos que k converge uniformemente a 1.
Proposición 9.8. k(θ, t) = κ(θ, t)√
2T − 2t converge de forma uniforme a 1.
Demostración.Gracias a la desigualdad de Bonnesen y al lema 2.7 tenemos que
L2
A− 4π ≥ (L− 2πrin)2
A=
(L√A− 2πrin√
2π(T − t)
)2
.
De que L/√A→ 2π se sigue que rin/
√T − t converge a
√2, lo que, junto con el teorema 8.11,
prueba la proposición.
Es también conveniente cambiar el parámetro temporal a τ = −12 log
(T−tT
).
Calculamos la ecuación de evolución para k.
∂
∂τk(θ, t) =
∂k
∂t· ∂t∂τ
= 2(T − t)(∂κ
∂t
√2t− 2t− 1√
2T − 2tκ(θ, t)
)= 2(T − t)
((κ2∂
2κ
∂θ2+ κ3
)√2T − 2t− 1
(2T − 2t)k
)= 2(T − t)
((k2∂
2k
∂θ2+ k3
)1
2T − 2t− 1
(2T − 2t)k
),
=
(k2∂
2k
∂t2+ k3 − k
),
9.1
es decir,∂k
∂τ=
(k2∂
2k
∂t2+ k3 − k
). 9.2
El objetivo es probar lo siguiente:
Teorema 9.12. ∥∥∥∥∂nk∂θn
∥∥∥∥∞≤ C(n)e−2ατ , para n ≥ 1, 0 < α < 1.
De donde,
57

Capítulo 9. Convergencia en Sentido C∞
Corolario 9.7. ∥∥∥∥∂nκ∂θn
∥∥∥∥∞≤ C(n)(T − t)α−1/2, para n ≥ 1, 0 < α < 1.
Demostración.En primer lugar, ∥∥∥∥∂nκ∂θn
∥∥∥∥∞
=1√
2T − 2t
∥∥∥∥∂nk∂θn
∥∥∥∥∞,
y por el resultado anterior∥∥∥∥∂nκ∂θn
∥∥∥∥∞≤ C(n)√
2T − 2te−2ατ = C(n)(T − t)α−1/2.
Esto implica que las derivadas de la curvatura de la curva no normalizada original convergena cero uniformemente. Probando esto, alcanzamos el objetivo de esta sección.Introducimos ahora dos desigualdades que utilizaremos después denotando de nuevo ∂f
∂θ = f ′.
Proposición 9.9 (Desigualdad de Wirtinger (verisión general)). Si∫ 2π
0 f = 0, entonces∫ 2π0 f2 ≤
∫ 2π0 (f ′)2.
Proposición 9.10 (Desigualdad de Sobolev). Si ‖f‖2 ≤ C y ‖f ′‖2 ≤ C, entonces ‖f‖∞ ≤(1/√
2π +√
2π)C, donde ‖·‖2 es la norma L2 y ‖·‖∞ la norma supremo para funciones en S1.
Observación 3. Estas dos desigualdades implican que una cota exponencial en la norma L2 dela n-ésima derivada garantiza una cota exponencial, con la misma constante en en el exponente,para las normas L∞ de todas las derivadas de orden inferior.
Haremos también uso de las siguientes desigualdades.
Lema 9.22. Sea f : R+ → R+ satisfaciendo que dfdτ ≤ cf1−1/p − 2pf . Entonces, f(τ)1/p ≤
(c/2p+De−2τ ) ≤ c(p).
Demostración.Calculamos
d
dτ(e2τf1/p) = 2e2τf1/p +
1
pf1/p−1∂f
∂τe4τ
≤ 2e2τf1/p +
(c
p− 2f2/p
)e4τ ≤ c
pe2τ .
9.3
Por tanto, e2τf1/p ≤ c2pe
2τ +D y se sigue el resultado.
Lema 9.23. Si dfdτ ≤ −αf + Ce−βτ , entonces
f(τ) ≤ De−ατ +C
α− βe−βτ , si α 6= β,
f(τ) ≤ De−ατ + Cτe−ατ si α = β.
9.4
58

Demostración.
d
dτ(eατf) = αeατf + eατ
df
dτ≤ Ce(α−β)τ .
Si α = β, ddτ (eατf) ≤ C, luego eατf ≤ Cτ +D.
Si α 6= β, ddτ (eατf) ≤ Ce(α−β)τ , luego eατf ≤ C
α−β e(α−β)τ +D.
Comenzamos ya a establecer las acotaciones.
Lema 9.24. ‖k′‖2 y ‖k′‖4 están acotadas por constantes independientes de τ .
Demostración.Calculamos utilizando integración por partes, la ecuación (9.2) y que tanto k como sus derivadasson 2π-periódicas, por serlo κ:
∂
∂τ
∫(k′)4 = 4
∫(k′)3(k2k′′ + k3 − k)′
=
∫−4(k′)4 − 12k2(k′)2(k′′)2 − 12k3(k′)2k′′.
9.5
Con la misma técnica que en las estimaciones de la parte III del trabajo, utilizando las desigualda-des de Peter-Paul (proposición 5.6), se acota el último término por 12k2(k′)2(k′′)2 + 3(k′)2k4.Como k converge a 1,
∂
∂τ
∫(k′)4 ≤
∫−4(k′)4 − C(k′)2,
y por la desigualdad de Hölder,
∂
∂τ
∫(k′)4 ≤ −4
∫(k′)4 + C1
(∫(k′)4
)1/2
.
La conclusión de ‖k′‖4 se sigue del lema 9.22 para p = 2. Para la acotación de ‖k′‖2 utilizamosde nuevo Hölder,
‖k′‖2 =
(∫(k′)2
)1/2
≤
((∫(k′)4
)1/2
· C2
)1/2
= C3‖k′‖4,
y tenemos el resultado.
Lema 9.25. ‖k′′‖2 está acotado por una constante que no depende de τ .
Demostración.Calculamos como antes utilizando integración por partes y la periodicidad de las funciones,
∂
∂τ
∫(k′′)2 = 2
∫(k′′)(k2k′′ + k3 − k)′′
=
∫−4kk′k′′k′′′ − 2k(k′′′)2 − 6k2k′k′′′ + 2k′k′′′
=
∫−4kk′k′′k′′′ − 2k(k′′′)2 − 6k2k′k′′′ − 2(k′′)2.
9.6
59

Capítulo 9. Convergencia en Sentido C∞
Escribimos el primer y tercer términos como
4kk′k′′k′′′ = 4(kk′′′)(k′k′′) ≤ 2
(ε1(kk′′′)2 +
(k′k′′)2
ε1
),
6k2k′k′′′ = 6(kk′′′)(kk′) ≤ 3
(ε2(kk′′′)2 +
(kk′)2
ε2
),
9.7
y tenemos que∂
∂τ(k′′)2 ≤ C1
∫(k′k′′)2 + C2
∫(kk′)2 − 2
∫(k′′)2. 9.8
En la demostración previa veíamos que ∂∂τ
∫(k′)4 =
∫−4(k′)4− 12k2(k′)2(k′′)2− 12k3(k′)2k′′,
luego ∫12k2(k′)2(k′′)2 ≤ − ∂
∂τ
∫(k′)4 +
∫−4(k′)4 − 12k3(k′)2k′′.
Sea m una cota inferior de k, y de nuevo por desigualdades de Peter-Paul, acotamos el últimotérmino obteniendo
12m2
∫k2(k′)2(k′′)2 ≤ − ∂
∂τ
∫(k′)4 + 12
∫ε(k′′)2 +
1
4ε(k′)4k6. 9.9
Llamamos f =∫
(k′′)2 y utilizando la ecuación (9.8) y la ecuación (9.9) con ε suficientementepequeño obtenemos
∂f
∂τ≤ −C3
∂
∂τ
∫(k′)4 + C4 − f,
donde hemos utilizado también las cotas del lema anterior. Multiplicando esto por eτ e integrandosobre τ se llega a∫ A
0
∂
∂τ(eτf)dτ ≤ −C3
∫ A
0eτ
∂
∂τ
(∫ 2π
0(k′)4
)dτ + C4e
A
≤ C3
∫ A
0eτ(∫ 2π
0(k′)4
)dτ −
(C3e
τ
∫ 2π
0(k′)4
)∣∣∣∣A0
+ C4eA.
9.10
Utilizando de nuevo las cotas del lema previo vemos que
eAf(A) ≤ C5eA + C6 + C4e
A,
de donde la conclusión se sigue de forma inmediata.
Lema 9.26. ‖k′‖∞ converge a 0 según τ →∞.
Demostración.De la desigualdad de Sobolev (proposición 9.10) y los dos resultados recién probados concluí-mos que ‖k′‖∞ <∞.La cota en ‖k′′‖2 implica que k′ es equicontinua, por lo que una subsucesión converge unifor-memente a g(θ). La primitiva de k′ debe converger a la primitiva de g, pero como k convergea 1 uniformemente, g ≡ 0. Dado que toda subsucesión converge a cero, k′(θ, t) convergeuniformemente a cero.
Ahora veremos cómo obtener cotas de decaimiento exponencial en las derivadas de orden
60

inferior.
Lema 9.27. Para todo 0 < α < 1 podemos encontrar un A de forma que para τ > A secumple ∫
(k′′)2 ≥ α∫
(k′)2.
Demostración.Deducimos del lema 5.10 que
∫cos θ/k =
∫sin /k = 0, por tanto∫
k′
k2cos θ =
∫k′
k2sin θ =
∫k′
k2= 0.
Por la desigualdad de Wirtinger (proposición 9.9),
∫ (k′
k2
)2
≤∫ [(
k′
k2
)′]2
.
Expandiendo el lado derecho y acotando con desigualdad de Peter-Paul,∫ (k′′
k2− 2
(k′)2
k3
)2
=
∫(k′′)2
k4− 4
(k′)2k′′
k5+ 4
(k′)4
k6
≤∫ (
k′′
k2
)2
+ 4(k′)4
k6+ 4ε
(k′′)2
k4+
1
ε
(k′)4
k6
≤ (1 + 4ε)
∫ (k′′
k2
)2
+ o(τ)
∫ (k′
k2
)2
,
9.11
pues ‖k′‖∞ → 0. Para A suficientemente grande, podemos suponer que k ∼ 1. Por tanto, paracualquier α con 0 < α < 1 tenemos que α
∫(k′)2 ≤
∫(k′′)2 como necesitábamos.
Lema 9.28. Para todo 0 < α < 1 existe una constante C tal que
‖k′‖2 ≤ Ce−2ατ .
Demostración.Consideramos
∂
∂τ
∫(k′)2 = 2
∫k′(k2k′′ + k3 − k)′ =
∫−2k2(k′′)2 + 6k2(k′)2 − 2(k′)2.
Por el resultado anterior, para todo 0 < α < 1 podemos elegir A tal que para τ > A
∂
∂τ
∫(k′)2 ≤ −2α
∫(k′)2 + 6α
∫(k′)2 − 2
∫(k′)2
es decir,∂
∂τ
∫(k′)2 ≤ −4α
∫(k′)2.
Por tanto, ‖k′‖22 ≤ Ce−4ατ y tenemos el resultado.
61

Capítulo 9. Convergencia en Sentido C∞
Lema 9.29. Para todo 0 < α < 1 podemos encontrar una constante C tal que
‖k′′‖2 ≤ Ce−2ατ .
Demostración.
∂
∂τ
∫(k′′)2 =
∫−2(k′′)2 − 2k2(k′′′)2 − 6k2k′k′′′ − 4kk′k′′k′′′
≤∫−2(k′′)2 − 2k2(k′′′)2 − 4ε1(kk′′′)2 +
1
ε1(k′k′′)2
+ 6ε2(kk′′′)2 +3
2ε2(kk′)2.
9.12
Tomamos εi pequeños y A suficientemente grande de forma que τ > A, ‖k′‖∞ sea muypequeño:
∂
∂τ
∫(k′′)2 ≤
∫−2α(k′′)2 − 2α(kk′′′)2 + Ce−4ατ .
Utilizando la desigualdad de Wirtinger estándar y que k converge uniformemente a 1, obtenemos
∂
∂τ
∫(k′′)2 ≤ −4α
∫(k′′)2 + Ce−4ατ .
Por el lema 9.23 tenemos entonces que
∂
∂τ
∫(k′′)2 ≤ Ce−4ατ ,
para cualquier α < α. Integrando, elevando al exponente 1/2 y ajustando la constante, se tieneel resultado.
Corolario 9.8. Para todo 0 < α < 1 existe una constante C tal que
‖k′‖∞ ≤ ce−2ατ .
Para acotar las derivadas terceras, necesitaremos el siguiente resultado.
Lema 9.30. Para todo 0 < α < 1 existe una constante C tal que
‖k′′‖4 ≤ Ce−ατ .
Demostración.Utilizando las técnicas habituales que venimos aplicando en este tipo de resultados
∂
∂τ
∫(k′′)4 = 4
∫(k′′)3(k2k′′ + k3 − k)′′
=
∫−4(k′′)4 − 12(k′′)2k′′′(k2k′′′ + 2kk′k′′ + 3k2k′)
=
∫−4(k′′)4 − 12(kk′′k′′′)2 − 24kk′(k′′)3 − 36k2k′(k′′)2k′′′.
9.13
62

De modo que acotamos
∂
∂τ
∫(k′′)4 ≤
∫−4(k′′)4 − 12(kk′′k′′′)2 + 24ε1k
2(k′′′)2
+24
4ε1(k′)2(k′′)4 + 36ε2(kk′′k′′′)2 +
36
4ε2(kk′k′′)2.
9.14
Escogemos εi pequeños y utilizamos las cotas obtenidas para ‖k′‖∞ y ‖k′‖2 de forma que, paraτ suficientemente grande,
∂
∂τ
∫(k′′)4 ≤ −4α
∫(k′′)4 + Ce−8ατ .
De nuevo, este lema se completa usando el lema 9.23.
Lema 9.31. Para todo 0 < α < 1 existe una constante C tal que
‖k′′′‖2 ≤ Ce−2ατ .
Demostración.
∂
∂τ
∫(k′′′)2 =2
∫(k′′′)(k2k′′ + k3 − k)′′′
= −2
∫k′′′′(k2k′′ + k3 − k)′′
= −∫
2k2(k′′′′)2 + 8kk′k′′′k′′′′ + 4k(k′′)2k′′′′
+ 4(k′)2k′′k′′′′ + 6k2k′′k′′′′ + 12k(k′)2k′′′′ + kk′′′′.
≤∫−2k2(k′′′′)2 + C1εk
2(k′′′′)2 +C2
ε(k′)2(k′′′)2
+C3
ε
(k′)4(k′′)2
k2+C4
ε(k′′)4 +
C5
ε(k′)4 +
C6
εk2(k′′)2 − 2(k′′′)2
≤ −α∫
(k′′′)2 + Ce−4ατ .
9.15
La última desigualdad se cumple para τ suficientemente grande de forma que el término C2
puede ser absorbido. Como en casos anteriores, hemos empleado las desigualdades de Peter-Pauly desigualdad de Wirtinger, como también el lema 9.29 y el corolario 9.8.Aplicando una vez más el lema 9.23 se finaliza la prueba.
Lema 9.32. Supongamos que n ≥ 4, 0 < α < 1, ‖k(n−1)‖2 ≤ C1e−2ατ y ‖k(j)‖∞ ≤ C2e
−2ατ ,j = 1, 2, . . . , n− 2. Entonces ‖k(n)‖2 ≤ C3e
−2ατ y ‖k(n−1)‖∞ ≤ C4e−2ατ .
Demostración.
63

Capítulo 9. Convergencia en Sentido C∞
Como en todos los casos anteriores, calculamos
∂
∂τ
∫(k(n))2 dθ =2
∫(k(n))(k2k′′ + k3)(n)
=
∫−2k(n+1)(k2k′′ + k3 − k)(n−1) − 2(k(n))2
=
∫−2k2(k(n+1))2 − 2(k(n))2
− 2(k(n+1))2(k2)′k(n)
− 2(k(n+1))2(k2)′′k(n−1)
− . . .
− 2(k(n+1))2(k2)(j)k(n+1−j)
− . . .
− 2(k(n+1))2(k2)(n−1)k′′
− 2(k(n+1))2(k3)(n−1),
9.16
para 2 ≤ j ≤ n−2. Los últimos términos pueden ser todos acotados en términos de una fracciónarbitrariamente pequeña del primer término y los siguientes:
C1((k2)′)2(k(n))2
k2,
C2((k2)′′)2(k(n−1))2
k2,
. . .
Cj((k2)(j))2(k(n+1−j))2
k2,
. . .
Cn−1((k2)(n−1))2(k′′)2
k2,
Cn(k3)(n−1)
k2.
9.17
De éstos, el primero puede ser acotado por una fracción arbitrariamente pequeña del término−2(k(n))2 (segundo término de la integral) siempre que τ se tome suficientemente grande.Tomamos α ∈ (α, 1). Los términos con constantes C2 y Cn−1 están acotados por Ce−4ατ
utilizando normas L∞ en las derivadas de orden inferior y norma L2 en la derivada n− 1. Eltérmino j-ésimo se puede acotar por Ce−4ατ empleando únicamente la norma L∞.Por último, acotamos el primer término de la integral por −
∫(k(n))2 utilizando la desigualdad
de Wirtinger y el hecho de que k tiende a 1 uniformemente. Con todo ello, obtenemos
∂
∂τ
∫(k(n))2 ≤ −4α
∫(k(n))2 + Ce−4ατ ,
y aplicamos de nuevo el lema 9.23 para completar la prueba.
El teorema 9.12 se prueba por inducción sobre los lemas probados en esta sección. Con este
64

teorema, tenemos cumplido el objetivo de esta parte.Como cierre de esta sección, vamos a enunciar el resultado principal probado en [3] que
resume toda la teoría probada hasta ahora.
Teorema 9.13 (de Gage y Hamilton). [Teorema principal en [3]] Si γ es una curva convexa yembedded en el plano, la ecuación del calor reduce γ a un punto. La curva se mantiene convexay su forma se hace circular a medida que encoge, en el sentido de que
1. la razón entre el radio inscrito y el radio circunscrito se aproxima a 1.
2. la razón entre la curvatura máxima y la curvatura mínima tiende a 1.
3. las derivadas de orden superior de la curvatura convergen a 0 de forma uniforme.
65


V
El Flujo de Acortamiento de Curvas No Convexas


Las Curvas Embedded en el Plano se Vuelven Convexas por el
Flujo
Capítulo 10: Las Curvas Embedded en el Plano se VuelvenConvexas por el Flujo
En este capítulo estudiaremos qué ocurre con el flujo de curvas no convexas, mostrandoque las curvas embedded se hacen convexas por el flujo sin formar singularidades. Con ellose completa la prueba de que el CSF contrae las curvas planas embedded a puntos de formadiferenciable.Como ya hemos mencionado, este resultado se debe a Grayson [4]. Los argumentos utilizados eneste trabajo son muy delicados, requiriendo el análisis por separado de qué ocurre bajo diferentesconfiguraciones geométricas, con diferentes soluciones en cada caso para probar que de hecho lacurva se vuelve convexa. Más recientemente, la prueba ha sido simplificada utilizando nuevasestimaciones isoperimétricas de forma que se van descartando ciertos tipos de comportamientoen las curvas y se obtiene la conclusión deseada. Un ejemplo en este sentido es el trabajo deHuisken [12].Nosotros vamos a seguir el enfoque del reciente trabajo llevado a cabo por Andrews y Bryanen [6], que obtuvieron una nueva estimación que acota inferiormente la longitud de cualquiercuerda en términos de la longitud de arco entre los dos puntos finales de la misma. Aplicandoesta estimación a segmentos pequeños se deduce directamente que la curvatura máxima decaeexponencialmente a 1.El objetivo es mostrar cómo se consigue esta estimación que controla las distancias de lascuerdas, cómo con ello se acota la curvatura y cómo al reescalar las curvas, de forma que tenganlongitud 2π, la curvatura máxima tiende a 1 de forma precisa.Con ello damos una demostración del teorema, que enunciamos a continuación, el cual es elobjetivo principal de este trabajo.
10.1. Teorema de Grayson
El resultado principal de esta sección y objetivo global del trabajo es el siguiente.
Teorema 10.14 (de Grayson). [Teorema principal en [4]] Consideremos el flujo de acortamiento
∂γ
∂t= κN 10.1
donde N(·, t) y κ(·, t) son respectivamente el vector normal unitario y la curvatura de la curvaγ(·, t).Sea γ0 : S1 → R2 una curva embedded y diferenciable. Entonces existe un tiempo T > 0
y una aplicación diferenciable γ : S1 × [0, T ) → R2 tal que γ satisface la ecuación (10.1),γ(·, 0) = γ0(·), y para cada t ∈ [0, T ) la curva γ(·, t) es embedded y diferenciable.Además, cuando t tiende a T , la curva γ(·, t) se hacer circular y se reduce a un punto.
Sea γ : (u, t) ∈ S1 × [0, T ) 7→ γ(u, τ) ∈ R2 una solución de la ecuación (4.10). Vamos anormalizar el flujo tomando γ : S1 × [0, T )→ R2 dada por
γ(u, t) =2π
L[γ(·, τ)]γ(u, τ), 10.2
69

Capítulo 10. Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo
donde
t =
∫ τ
0
(2π
L[γ(·, τ ′)]
)2
dτ′,
T =
∫ T
0
(2π
L[γ(·, τ ′)]
)2
dτ′.
10.3
L denota la longitud y, con esto, hemos conseguido que la longitud sea L[γ(·, t)] = 2π paratodo t. Se cumple además lo siguiente:
Proposición 10.11. γ(u, t) es solución del flujo normalizado de acortamiento de curvas
∂γ
∂t= κ2γ + κN, 10.4
donde κ es la curvatura de la curva normalizada γ y κ2(t) = 12π
∫S1 κ(u, t)2 es la curvatura
promedio.
Demostración.Calculamos la derivada de γ con respecto a t, y obtenemos
∂
∂tγ(u, t) =
∂
∂t
(2π
L[γ(·, τ)]γ(u, τ)
)=− 2π
L[γ(·, τ)]2d
dt(L[γ(·, τ)])γ(u, τ) +
2π
L[γ(·, τ)]
∂
∂tγ(u, τ)
=− 2π
L[γ(·, τ)]2dτ
dt
d
dτ(L[γ(·, τ)])γ(u, τ) +
2π
L[γ(·, τ)]
dτ
dt
∂
∂τγ(u, τ)
=− 2π
L[γ(·, τ)]2
(L[γ(·, τ)]
2π
)2 d
dτ(L[γ(·, τ)])γ(u, τ)
+2π
L[γ(·, τ)]
(L[γ(·, τ)]
2π
)2 ∂
∂τγ(u, τ)
=1
2π
∫S1κ(u, τ)2|γu(u, τ)| duγ(u, τ) +
L[γ(·, τ)]
2πκ(u, τ)N(u, τ)
=1
2π
∫S1
(κ(u, τ)
L[γ(·, τ)]
2π
)2
|γu(u, t)| duγ(u, t) + κ(u, t)N(u, t)
=1
2π
∫S1κ(u, t)2|γu(u, t)| duγ(u, t) + κ(u, t)N(u, t)
=κ2(t)γ(u, t) + κ(u, t)N(u, t).
10.5
Antes de poder dar una prueba para el teorema 10.14, vamos a necesitar introducir unresultado que compara la longitud de cuerda d y la longitud de arco ` de dos puntos en lacurva γ(·, t). La idea es encontrar una función f la cual se comporte como 2 sin(x/2) y tal qued ≥ f(`), utilizando para la comparación que d = 2 sin(`/2) se da para la circunferencia unidad.
Teorema 10.15 (de Andrews y Bryan [6]). Sea γ : S1 × [0, T )→ R2 una curva diferenciableembedded solución de la ecuación (10.4) con longitud total fija 2π. Entonces existe t ∈ R tal
70

10.2 Demostración del Teorema de Grayson
que para u1, u2 ∈ S1 y t ≥ 0
d(u1, u2, t) ≥ f(`(u1, u2, t), t− t), 10.6
donde d(u1, u2, t) = |γ(u1, t)− γ(u2, t)| y `(u1, u2, t) = mın|∫ u2u1|γu| du|, 2π− |
∫ u2u1|γu| du|,
y la función f viene dada por f(x, t) = 2et arctan(e−t sin(x2
)), con x ∈ [0, 2π] y t ∈ R.
Además, T =∞ y supu∈S1
κ(u, t)2 ≤ 1 + 2e2(t−t) para t ∈ [0, T ).
Notemos que la ecuación (10.6) puede ser utilizada para medir el embeddedness bajo el flujo.En efecto, si existen u1, u2 ∈ S1 tales que d(u1, u2, t) = 0, entonces f(`(u1, u2, t), t− t) = 0.Luego `(u1, u2, t) = 0. Esto implicaría que u1 = u2.
10.2. Demostración del Teorema de Grayson
Para probar el teorema 10.14, utilizaremos el teorema 10.15, el cual vamos a probar siguiendotres pasos.
Paso 1En este primer paso demostramos la ecuación (10.6) para t = 0, es decir que la desigualdad
se cumple para la curva inicial γ0(·) = γ(·, 0).Tomando la derivada de f con respecto a t tenemos que
∂
∂tf(x, t) = 2et arctan
(e−t sin
(x2
))+ 2et
−e−t sin(x2
)1 + e−2t sin2
(x2
)= 2etg
(e−t sin
(x2
)),
10.7
donde g(z) = arctan(z)− z1+z2
. Observamos que
g(0) = 0,
g′(z) =1
1 + z2− 1 + z2 − 2z2
(1 + z2)2
=2z2
(1 + z2)2> 0.
10.8
Por tanto, f es una función estrictamente creciente en el tiempo t. Denotamos F (u1, u2, t) =
d(u1, u2, 0)−f(`(u1, u2, 0),−t) para u1, u2 ∈ S1 tales que u1 6= u2 y t ∈ R. Por la observaciónanterior, se tiene que ∂F
∂t > 0, y gracias al Teorema de la Función Implícita
a(u1, u2) = ınfet : F (u1, u2, t) ≥ 0
es una función diferenciable y para 0 < d < 2 sin(`/2) se cumple que
d(u1, u2, 0) = f(`(u1, u2, 0),− log(a(u1, u2))). 10.9
71

Capítulo 10. Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo
Utilizaremos esta igualdad más adelante.Vamos ahora a extender a S1 × S1 la función a, de forma que sea continua en este dominio. Lovemos en la siguiente proposición.
Proposición 10.12. La función a se extiende a una función continua en S1 × S1 definiendo
a(u, u) =
√maxκ0(u)2 − 1, 0
2,
donde κ0 representa la curvatura de la curva γ0.
Demostración.Necesitamos probar que a es continua en cada punto (u, u). Fijamos u y supongamos que γ(·, 0)
está parametrizada por longitud de arco s. Por la fórmula de Taylor alrededor del punto s1 setiene que
γ0(s) = γ0(s1) + (s− s1)T (s1)− (s− s1)2
2κ0(s1)N(s1)
− (s− s1)3
6
(κ0s(s1)N(s1)− κ0(s1)2T (s1)
)+ o(|s− s1|4).
10.10
Luego, calculando la distancia al cuadrado de dos puntos s1, s2 tenemos que
d(s1, s2, 0)2 =|γ0(s2)− γ0(s1)|2
=|s2 − s1|2(
1− (s2 − s1)2
12κ0(s1)2 +O(|s2 − s1|3)
)=|s2 − s1|2
(1− (s2 − s1)2
12κ0(0)2 +O((|s2|+ |s1|)|s2 − s1|2)
).
10.11
Ahora, como `(s2, s1, 0) = |s2 − s1|, se sigue que
d(s1, s2) = `(s1, s2)− `(s1, s2)3
24
(κ0(0)2 +O((|s2|+ |s1|)|s2 − s1|2)
).
Utilizando de nuevo la fórmula de Taylor ahora para f alrededor de x = 0
f(x, t) = x− 1 + 2e−2t
24x3 +O(x4),
por lo que
f(x,− log a) = x− 1 + 2a2
24x3 +O(x4).
De forma que, al ser 2 sin(x/2) = x − 124x
3 + O(x4), la ecuación (10.9) nos dice que paraκ0(0)2 > 1
`−(κ0(0)2
24+O(|s1|+ |s2|)
)`3 = `− 1 + 2a2
24`3 +O(`4),
y entonces maxκ0(0)2, 1 = 1 + 2a(s1, s2)2 +O(|s1|+ |s2|). En particular se tiene que
lım(s1,s2)→(0,0)
a(s1, s2) =
√maxκ0(u)2 − 1, 0
2,
72

10.2 Demostración del Teorema de Grayson
probando así que a es continua.
Por la ecuación (10.9) y la proposición 10.12 obtenemos que
d(u1, u2, 0) ≥ f(`(u1, u2, 0),− log(a(u1, u2))) ≥ f(`(u1, u2, 0),−t),
donde t = log(supu1,u2∈S1|a(u1, u2)| : u1 6= u2). Esto significa que la ecuación (10.6) secumple para el tiempo inicial t = 0, finalizando así el primer paso de la prueba.
Paso 2Mostramos ahora que la ecuación (10.6) se cumple para tiempos t positivos utilizando un
argumento de principio del máximo.Comenzamos definiendo
Z(u1, u2, t) = d(u1, u2, t)− f(`(u1, u2, t), t− t).
Observamos que Z es continua en S1 × S1 × [0, T ) y diferenciable en los puntos u1 6= u2.Fijemos t1 ∈ (0, T ) y elegimos una constante C > supκ2(t) : 0 ≤ t ≤ t1. Por otro lado, seaZε(u1, u2, t) = Z(u1, u2, t) + εeCt, probamos por contradicción que Zε permanece positivoen S1 × S1 × [0, t1] para cualquier ε > 0.En t = 0 y en la diagonal (u, u) : u ∈ S1 se tiene que Zε ≥ ε > 0, luego si Zε no semantiene positivo entonces existe un tiempo t0 ∈ (0, t1] y (u01, u02) ∈ S1 × S1 con u01 6= u02
tales que
Zε(u01, u02, t0) = 0 = ınfZε(u1, u2, t) : u1, u2 ∈ S1, t ∈ [0, t0]. 10.12
De modo que en el punto (u01, u02, t0) se cumple Z = −εeCt0 y además
∂
∂tZ + CεeCt0 =
∂
∂tZε ≤ 0,
mientras que la primera derivada espacial de Z se anula y la segunda es no negativa.Para continuar con esta demostración tomamos ξ, η ∈ R arbitrarios yσ(v) = (u01 + ξv, u02 +ηv, t0) y suponemos, sin pérdida de generalidad, que la curva embeddedy diferenciable γ(·, t0) está parametrizada por la longitud de arco y elegimos la orientación deforma que ∂`
∂v (u01 + ξv) = −ξ y ∂`∂v (u02 + ηv) = η. Comenzamos calculando la primera derivada
∂Z
∂v(σ(v)) =
∂d
∂v(σ(v))− ∂f
∂v(`(σ(v)), t0)
= 〈ηγ′(u02 + ηv, t0)− ξγ′(u01 + ξv, t0),γ(u02 + ηv, t0)− γ(u01 + ξv, t0)
|γ(u02 + ηv, t0)− γ(u01 + ξv, t0)|〉
− f ′ · (η − ξ)
= η(〈T (u02 + ηv, t0),W 〉 − f ′
)+ ξ
(−〈T (u01 + ηv, t0),W 〉+ f
′),
10.13
73

Capítulo 10. Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo
donde f′denota la derivada en el primer argumento y hemos definido para u1 6= u2
W (u1, u2, t) =γ(u2, t)− γ(u1, t)
d(u1, u2, t).
Hemos obtenido que
∂Z
∂v(σ(v)) = η
(〈T (u02 + ηv, t0),W 〉 − f ′
)+ ξ
(−〈T (u01 + ηv, t0),W 〉+ f
′), 10.14
y observamos que el lado derecho de la ecuación (10.14) se anula en v = 0, luego
f′
= 〈W,T (u01)〉 = 〈W,T (u02)〉. 10.15
Por lo tanto, hay dos posibilidades: o bien T (u02) = T (u01) 6= W , o W biseca T (u01) y T (u02).
1. Vamos a descartar el primero de los casos. Si T (u02) = T (u01) 6= W , el normal formaun ángulo agudo con la cuerda u01u02 en uno de sus extremos, y un ángulo obtuso en elotro. Por tanto, los puntos de la cuerda cercanos a uno de los extremos están dentro dela región acotada por la curva, mientras que los puntos cercanos al otro extremo estánfuera, lo que implica que existe al menos un punto donde la curva coincide con la cuerda.Podemos asumir que uno de esas intersecciones ocurre en s con u01 < s < u02.Tenemos entonces que
d(u01, u02, t0) = d(u01, s, t0) + d(s, u02, t0),
`(u01, u02, t0) = mın`(u01, s, t0) + `(s, u02, t0), 2π − `(u01, s, t0)− `(s, u02, t0).10.16
Observamos sobre la función f = f(·, a) que es estrictamente cóncava, luego f(x+ y) =
f(x + y) + f(0) ≤ f(x) + f(y) para los x, y > 0 y tales que x + y < 2π. Además,f(x) = f(2π − x). Con todo ello,
Z(u01, u02, t0) =d(u01, u02, t0)− f(`(u01, u02, t0), a)
=d(u01, s, t0) + d(s, u02, t0)− f(`(u01, s, t0) + `(s, u02, t0), a)
>d(u01, s, t0)− f(`(u01, s, t0), a) + d(s, u02, t0)− f(`(s, u02, t0), a)
=Z(u01, s, t0) + Z(s, u02, t0),
10.17
luego o bien Z(u01, s, t0) < Z(u01, u02, t0) o Z(s, u02, t0) < Z(u01, u02, t0), lo cual esimposible pues contradice la ecuación (10.12).
2. Consideramos ahora el segundo caso, el cual es más complicado. Calculamos la derivada
74

10.2 Demostración del Teorema de Grayson
segunda de Z a lo largo de σ (omitiendo la componente temporal t0),
∂2Z
∂v2(σ(v)) = η
∂
∂v
(〈T (u02 + ηv),W 〉 − f ′
)+ ξ
∂
∂v
(−〈T (u01 + ξv),W 〉+ f
′)
= η
(η〈T ′(u02 + ηv),W 〉+ 〈T (u02 + ηv),
∂W
∂v〉 − f ′′ ∂`
∂v(u01 + ξv, u02 + ηv)
)+ ξ
(−ξ〈T ′(u01 + ξv),W 〉 − 〈T (u01 + ξv),
∂W
∂v〉+ f
′′ ∂`
∂v(u01 + ξv, u02 + ηv)
)= η2〈T ′(u02 + ηv),W 〉+ η〈T (u02 + ηv),
∂W
∂v〉 − η2f
′′+ ηξf
′′
− ξ2〈T ′(u01 + ξv),W 〉 − ξ〈T (u01 + ξv),∂W
∂v〉 − ξ2f
′′+ ξηf
′′
= η2〈κ(u02 + ηv)N(u02 + ηv),W 〉+η2
d− ηξ
d〈T (u01 + ξv), T (u02 + ηv)〉
− η2
d(〈T (u02 + ηv),W 〉)2 +
ξη
d〈T (u02 + ηv),W 〉〉T (u01 + ξv),W 〉 − η2f
′′+ ηξf
′′
− ξ2〈κ(u01 + ξv)N(u01 + ξv),W 〉+ξ2
d− ηξ
d〈T (u01 + ξv), T (u02 + ηv)〉
− ξ2
d(〈T (u01 + ξv),W 〉)2 +
ξη
d〈T (u02 + ηv),W 〉〉T (u01 + ξv),W 〉 − ξ2f
′′+ ξηf
′′
= ξ2
(1
d(1− 〈T (u01 + ξv),W 〉2)− 〈κ(u01 + ξv)N(u01 + ξv),W 〉 − f ′′)
)+ η2
(1
d(1− 〈T (u02 + ηv),W 〉2)− 〈κ(u02 + ηv)N(u02 + ηv),W 〉 − f ′′)
)+ 2ηξ
(1
d(〈T (u01 + ξv),W 〉〈T (u02 + ηv),W 〉 − 〈T (u01 + ξv), T (u02 + ηv)〉) + f
′′)
).
10.18
De forma que
∂2Z
∂v2(σ(v))
∣∣∣∣v=0
= ξ2
(1
d(1− 〈W,T (u01)〉2) + 〈W,κ(u01)T (u01)〉 − f ′′
)η2
(1
d(1− 〈W,T (u02)〉2) + 〈W,κ(u02)T (u02)〉 − f ′′
)+ 2ξη
(1
d(〈W,T (u01)〉〈W,T (u02)〉 − 〈T (u01), T (u02)〉) + f
′′).
10.19
Por el hecho de que T (u01) y T (u02) bisecan, tenemos que
〈T (u01),W 〉 = 〈T (u02),W 〉 = cos θ y 〈T (u01), T (u02)〉 = cos 2θ = 2 cos2 θ − 1.
75

Capítulo 10. Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo
Si además elegimos ξ = 1 y η = −1, se sigue que
∂2
∂v2Z(σ(v))
∣∣∣∣v=0
=1
d(1− cos2 θ)− 〈W,κ(u01)N(u01)〉 − f ′′
− 2
d(cos2 θ − 2 cos2 θ + 1)− 2f
′′
+1
d(1− cos2 θ)− 〈κ(u02)N(u02),W 〉 − f ′′
= 〈W,κ(u01)N(u01)− κ(u02)N(u02)〉 − 4f′′
≥ 0,
10.20
es decir tenemos la desigualdad, que utilizaremos más tarde,
0 ≤ 〈W,κ(u01)N(u01)− κ(u02)N(u02)〉 − 4f′′. 10.21
Nos centramos ahora en estudiar ver cómo evolucionan d y ` bajo el flujo dado por laecuación (10.4). Calculamos
∂
∂td(u1, u2, t) =
∂
∂t|γ(u1, t)− γ(u2, t)|
=〈γt(u1, t)− γt(u2, t),W 〉
=〈κ2(t)γ(u02, t) + κ(u02, t)N(u02, t)− κ2(t)γ(u01, t)− κ(u01, t)N(u01, t),W 〉
=〈κ(u02, t)N(u02, t)− κ(u01, t)N(u01, t),W 〉+ κ2(t)d(u01, u02, t),
10.22
y por otro lado,
∂
∂t`(u1, u2, t) =
∂
∂t
∫ u2
u1
|γu1(u1, t)| du1
=
∫ u2
u1
∂
∂t|γu1(u1, t)| du1
=
∫ u2
u1
〈 ∂∂tγu1(u1, t),
γu1(u1, t)
|γu1(u1, t)|〉 du1
=
∫ u2
u1
〈 ∂∂u1
(κ2(t)γ(u1, t) + κ(u1, t)N(u1, t)
),γu1(u1, t)
|γu1(u1, t)|〉 du1
=
∫ u2
u1
κ2(t)|γu1(u1, t)| du1 −∫ u2
u1
κ(u1, t)2|γu1(u1, t)| du1
=κ2(t)`(u1, u2, t)−∫ u2
u1
κ(u1, t)2|γu1(u1, t)| du1.
10.23
De estas dos ecuaciones de evolución obtenemos una expresión para la derivada temporal
76

10.2 Demostración del Teorema de Grayson
de Z
−CεeCt0 ≥ ∂
∂tZ(u01, u02, t0)
=∂
∂td(u01, u02, t0)− f ′ ∂
∂t`(u01, u02, t0)− ∂f
∂t
= 〈κ(u02, t0)N(u02, t0)− κ(u01, t0)N(u01, t0),W 〉+ κ2(t0)d(u01, u02, t0)
− f ′(κ2(t0)`(u01, u02, t0)−
∫ u02
u01
κ(u1, t0)2|γu1(u1, t0)| du1
)− ∂f
∂t
= 〈κ(u02, t0)N(u02, t0)− κ(u01, t0)N(u01, t0),W 〉
+ κ2(t0)(d(u01, u02, t0)− f ′ `(u01, u02, t0)
)+ f
′∫ u02
u01
κ(u1, t0)2|γu1(u1, t0)| du1 −∂f
∂t
= 〈κ(u02, t0)N(u02, t0)− κ(u01, t0)N(u01, t0),W 〉
+ κ2(t0)(−εeCt0 + f(`(u01, u02, t0), t0)− f ′ `(u01, u02, t0)
)+ f
′∫ u02
u01
κ(u1, t0)2|γu1(u1, t0)| du1 −∂f
∂t
≥ 4f′′
+ κ2(t0)(−εeCt0 + f(`(u01, u02, t0), t0)− f ′ `(u01, u02, t0)
)+ f
′∫ u02
u01
κ(u1, t0)2|γu1(u1, t0)| du1 −∂f
∂t,
10.24
donde hemos utilizado la ecuación (10.21) en el último paso. Reescribimos la desigualdadanterior de forma compacta como
− CεeCt0 ≥ 4f′′
+ κ2(−εeCt0 + f − f ′`
)+ f
′∫ u02
u01
κ2 − ft. 10.25
Ahora procedemos a estimar algunos términos de la ecuación (10.25). Como f es cóncava,(f − f ′`)′ = −f ′′` > 0 entonces f − f ′` > 0 para ` > 0. Gracias a la desigualdad deHölder, vemos que
1 =
(1
2π
)2(∫S1κ
)2
≥ 1
2π
∫S1κ2 = κ2.
Ahora, dado que 0 ≤ ` ≤ π, f ′(`, t) = cos `/2
1+e−2t sin2 `/2≥ 0. Con ello podemos estimar
∫ u02
u01
κ2 ≥ 1
`
(∫ u02
u01
|κ|)2
≥ θ2
`,
donde θ aquí es el ángulo que generan T (u01) y T (u02). Esto es dos veces el ánguloentre T (u01) y W , luego por la ecuación (10.15) tenemos que θ = 2 arc cos(f
′), y la
77

Capítulo 10. Las Curvas Embedded en el Plano se Vuelven Convexas por el Flujo
ecuación (10.25) queda ahora
Lf :=4f′′
+ f − f ′`+ 4f′
`(arc cos(f
′))2 − ft
≤− CεeCt0 + κ2εeCt0
<0
10.26
para nuestra elección de C > supκ2(t) : 0 ≤ t ≤ t1.Hacemos una estimación más profunda: observando que z 7→ h(z) := (arc cos(z))2 esuna función convexa en [0, 1] llegamos a que
h(f′) ≥ h(cos(`/2)) + h
′(cos(`/2))(f
′ − cos(`/2)) =`2
4− `
sin `/2(f′ − cos(`/2)).
Finalmente se deduce que
Lf =4f′′
+ f − f ′`+ 4f′
`(arc cos(f
′))2 − ft
=4f′′
+ f − f ′`+ 4f′
`h(f
′)− ft
≥4f′′
+ f − f ′`+ 4f′
`
(`2
4− `
sin(`/2)(f′ − cos(`/2))
)− ft
=4f′′
+ f − 4f′
sin(`/2)(f′ − cos(`/2))− ft
=:Lf.
10.27
El cálculo nos garantiza además que f es de hecho una solución de la ecuación Lf = 0.Esto contradice el hecho de que Lf ≤ Lf < 0.
Hemos tratado los dos casos y con ello llegamos a la demostración buscada, terminando estaparte de la prueba del teorema.
Paso 3En esta última parte, veremos en primer lugar que la curvatura κ está uniformemente acotada
y después que el tiempo máximo de existencia diferenciable es T =∞.
1. Argumentando como en el paso 1 de la prueba, tenemos que
a(u, u, t) =
√maxκ(u, t)2 − 1, 0
2
≤ supu1,u2∈S1,u1 6=u2
a(u1, u2, t)
≤et−t.
10.28
Con esto se llega a quesupu∈S1
κ(u, t)2 ≤ 1 + 2e−2(t−t),
para 0 ≤ t ≤ T , y tenemos la acotación.
78

10.2 Demostración del Teorema de Grayson
2. Supongamos que T <∞. Como ya hemos visto la curvatura se acota mediante la expresión|κ(u, t)| ≤ sup
t∈[0,T ]1 + 2e−2(t−t) <∞.
La curva no normalizada puede ser calculada utilizando la normalizada fijando
λ(t) =L[γ(·, 0)]
2πe−∫ t0 κ
2(t′)dt′,
γ(·, τ) =λ(t)γ(u, t),
10.29
donde τ =∫ t
0 λ(t′)2 dt
′. En particular, κmax(τ) = |κ(u, τ)| : u ∈ S1 está acotada
para τ ∈ [0, T ), lo cual es imposible.Por otro lado, se pueden obtener cotas para las derivadas de κ con argumentos similaresa los utilizados en los temas anteriores del presente trabajo.
Demostración.(del teorema 10.14) Ya tenemos suficientes ingredientes para probar el resultado principal.En primer lugar, deducimos la convergencia exponencial de κ a 1. Dado que
∫κ ds = L = 2π,∫
(κ(s)− 1)2 ds =
∫κ2 ds− 2
∫κ ds+ L
=
∫(κ2 − 1) ds
≤2e−2(t−t).
10.30
Es posible establecer una convergencia más fuerte utilizando las desigualdades de Gagliardo-Nirenberg (ver Teorema 19 en [13]), que afirma que, dado que
∫(κ− 1) ds = 0,
‖∂nκ‖∞ ≤ C(n, t, ε)e−(1−ε)t
para t ≥ 1 y ε > 0 arbitrario.Por tanto, κ(s)→ 1 en C∞ a medida que t→∞ y se sigue que las curvas normalizadas conlongitud 2π convergen a un círculo unidad.El resultado se sigue utilizando las fórmulas dadas antes para recuperar las ecuaciones nonormalizadas desde las normalizadas.
79

VI
Comentarios finales


Como colofón a este monográfico, nos gustaría finalizar dando unas pinceladas de cómoesta teoría ha evolucionado posteriormente a lo contado aquí. Por un lado, la teoría del CSFha seguido creciendo estudiando soluciones especiales así como las curvas en espacios másgenerales. Por otro lado, de forma muy seguida a los trabajos ya mencionados, siguieron otrosque trataban sobre el flujo de curvatura media generalizado a hipersuperficies. Vamos a enunciaralguno de los resultados más importantes en este sentido.
El flujo de curvatura ha sido también estudiado para curvas en el espacio Euclídeotridimensional. En este caso, las curvas pueden cruzarse entre sí o a sí misma, y el flujopuede generar singularidades en las curvas. Se probó que cada singularidad es asintótica aun plano ([15]). Además, el estudio del flujo sobre estas curvas ha sido utilizado como unade las formas para definir el flujo tras singularidades en el caso de curvas planas ([16]).En un setup más general, como el caso de una superficie Riemanniana, se tiene el siguienteresultado, probado en [17], el cual es una generalización de lo visto en el presente trabajopara curvas planas.
Teorema 10.16. Sea γ una curva embedded y cerrada evolucionando por flujo decurvatura en una superficie Riemanniana compacta. Si aparece una singularidad en tiempofinito, entonces la curva converge a un punto, con forma circular, en sentido C∞.
También es posible extender la definición del flujo a inputs más generales que las curvas. Porejemplo, empleando varifolds rectificables o el método del conjunto de nivel. Sin embargo,estas definiciones extendidas pueden generar que partes de las curvas desaparezcaninstantaneamente o engorden a conjuntos de área no nula ([18]).Por otro lado, de forma casi contemporánea a los trabajos de Gage y Hamilton, GerhardHuisken en [19] extendía el estudio del flujo de curvatura al caso de superficies convexas.A raíz de este trabajo, también se abrió una rama de estudio que ha interesado y continuainteresando a grandes matemáticos del momento. Con el enunciado del teorema principalde [19] damos por concluida esta exposición.
Teorema 10.17. Sea M = M0 una superficie uniformemente convexa n-dimensional sinfrontera y embedded diferenciablemente en Rn+1. Supongamos que M0 está representadalocalmente por un difeomorfismo F0 : Rn ⊃ U → F0(U) ⊂M0 ⊂ Rn+1 y sea F (·, t) unafamilia de aplicaciones satisfaciendo
∂
∂tF (x, t) = ∆tF (x, t), x ∈ U,
F (·, 0) = F0,
10.31
donde ∆t es el operador de Laplace-Beltrami en la variedad Mt, dado por F (·, t). Setiene que ∆tF (x, t) = −H(x, t) ·N(x, t), donde H(·, t) es la curvatura media y N(·, t)es el normal unitario exterior en Mt. Entonces, la forma de Mt se acerca a la de unaesfera según avanza t y no ocurre ninguna singularidad antes de que las superficies Mt sereduzcan a un único punto después de un tiempo finito.
83


BibliografíaBibliografía
[1] Michael E. Gage, An isoperimetric inequality with applications to curve shortening, Duke MathematicalJournal 50 (1983), 1225-1229.
[2] , Curve shortening makes convex curves circular, Invent. Math. 76 (1984), 357-364.
[3] Michael E. Gage y Richard S. Hamilton, The heat equation shrinking convex plane curves, J. DifferentialGeometry 23 (1986), 69-96.
[4] Matthew A. Grayson, The heat equation shrinks embedded plane curves to round points, J. DifferentialGeometry 26 (1987), 285-314.
[5] Kai-Seng Chou y Xi-Ping Zhu, The curve shortening problem, Chapman and Hall/CRC, Boca Raton,London, New York, Washington DC, 2001.
[6] Ben Andrews y Paul Bryan, Curvature bound for curve shortening flow via distance comparison and a directproof of Grayson’s theorem, J. reine angew. Math. 653 (2011), 179-187.
[7] William W. Mullins, Two-dimensional motion of idealized grain boundaries, Journal of Applied Physics 27(1956), 900-904.
[8] Thomas Kwok-Keung Au, On the saddle point property of Abresch-Langer curves under the curve shorteningflow, Communications in Analysis and Geometry 18 (2010), 1-21.
[9] J. Langer y U. Abresch, The normalized curve shortening flow and homothetic solutions, Journal ofDifferential Geometry 23 (1986), 175-196.
[10] Dylan J. Altschuler y Steven J. Altschuler y Sigurd B. Angenent y Lani F. Wu, The zoo of solitons forcurve shortening in Rn, Nonlinearity 26 (2013), 1189-1226.
[11] Robert Osserman, Bonnesen-style isoperimetric inequalities, Amer. Math. Monthly 86 (1979), 1.
[12] Gerhard Huisken, A distance comparison principle for evolving curves, Asian J. Math. 2 (1998), 127-133.
[13] Ben Andrews, The affine curve-lengthening flow, J. reine angew. Math. 506 (1999), 43-83.
[14] Victor Andreevich Toponogov, Differential geometry of curves and surfaces. A concise guide, Birkhäuser,Boston, Basel, Berlin, 2006.
[15] Steven J. Altschuler, Singularities of the curve shrinking flow for space curves, Journal of DifferentialGeometry 34 (1991), 491-514.
[16] Steven J. Altschuler y Matthew A. Grayson, Shortening space curves and flow through singularities, Journalof Differential Geometry 35 (1992), 283-298.
[17] Murugiah Muraleetharan, Evolution of curves by curvature flow, Lehigh University, 2006.
[18] Brian White, Some recent developments in differential geometry, The Mathematical Intelligencer 11 (1989),41-47.
[19] Gerhard Huisken, A distance comparison principle for evolving curves, Asian J. Math. 2 (1998), 127-133.
85