falk näth/ andreas hummel u.a. fortlaufende semantische 3d-kartierung auf archäologischen...
TRANSCRIPT
Fortlaufende semantische 3D-
Kartierung auf archäologischen
Ausgrabungsstätten
FuE-Koop KF 294 630 2H M2
Projektpartner: Falk Näth, Volker Platen, Andreas Hummel, Christian Hillen (denkmal3D) Andreas Nüchter, Dorit Borrmann, HamidRheza Houshir, Jan Elseberg (Jacobs University) Stephan Winkler, Marc Mallett (mno data)

1
Inhalt Einleitung/ Übersicht ............................................................................................................................... 2
Vorgehensweise ...................................................................................................................................... 2
Ergebnisse ............................................................................................................................................... 6
Ansätze der Befundansprache ......................................................................................................... 8
Allgemeine Beschreibungskriterien bei Erdbefunden ...................................................................... 8
Allgemeine Beschreibungskriterien bei Baubefunden ..................................................................... 9
Stratigrafie ....................................................................................................................................... 9
Evaluation ...................................................................................................................................... 10
Anforderungen............................................................................................................................... 10
Umsetzung der Ergebnisse: Einspeisung des Scans ins Programm ............................................... 11
Umsetzung der Ergebnisse: Navigation innerhalb des Scans ........................................................ 11
Umsetzung der Ergebnisse: Bearbeitung und Ausgabe ................................................................. 12
FuE von dritter Seite .............................................................................................................................. 17
Aussichten ............................................................................................................................................. 18
Wiss. Veröffentlichungen ...................................................................................................................... 19
2
Einleitung/ Übersicht Im Verlauf des Projekts sollte ein innovatives technisches System entwickelt und zur
Anwendungsreife gebracht werden, das Archäologen in die Lage versetzt, fortlaufend Ausgrabungen
mit einem 3D-Scanner zu überwachen und zu erfassen. Bei archäologischen Arbeiten werden
horizontale und vertikale Schnitte durch den Boden angefertigt und fortlaufend Befunde
aufgenommen. Ziel war es, die Grabungsdokumentation so zu automatisieren, dass aufwändige
Arbeiten auf Millimeterpapier vermieden werden. Stattdessen sollte ein Laserscanner kontinuierlich
die freigelegten Schichten und Objekte präzise und dreidimensional aufnehmen. Die anfallenden
Daten werden noch vor Ort ausgewertet. Dazu musste jedoch auch die Semantik der Ausgrabung
vollständig erfasst werden. Befunde müssen in den Daten teilautomatisch markiert und
Interpretationen mit Hilfe von Bezeichnungen, Beziehungen und Kontextinformationen ergänzt
werden. Durch eine clevere Kombination neuer technologischer Konzepte aus der Robotik mit High-
Tech Archäologie werden Arbeiten vor Ort erheblich beschleunigt, was zu Kostenersparnissen der
Dienstleister führt.
Archäologie ist eine historische Wissenschaft von hoher gesellschaftlicher Relevanz. Sie interessiert
sich für den Menschen und seine Hinterlassenschaften wie Gebäude, Werkzeuge, Kunstwerke etc.
Bei jedem Bauprojekt in Deutschland wird beispielsweise im Rahmen des Bauantrags eine
Überprüfung auf mögliche Schäden an Bodendenkmalen hin durchgeführt. Wird ein vermuteter
Fundplatz durch das Bauprojekt zerstört oder teilzerstört, muss der Bau archäologisch begleitet
werden. Um die Kosten für die Bauherren zu minimieren, ist es wünschenswert, die Grabung effizient
durchzuführen. Hier setzt unser Projekt an: Eine einfach zu bedienendes Hardware- und
Softwaresystem soll entwickelt werden, dass den Archäologen erlaubt, Grabungen fortlaufend mit
optischer Messtechnik zu digitalisieren und noch vor Ort auszuwerten. Dadurch lassen sich
archäologische Tätigkeiten effizienter durchführen, was auch zu Kostenersparnissen führt. Nach
Beendigung der archäologischen Tätigkeiten erhält der Bauherr Baufreiheit für sein Projekt, die
gesammelten Daten und eventuelle Funde werden aufgearbeitet und ein Bericht wird dem
zuständigen Amt zur Verfügung gestellt.
Vorgehensweise Regelmäßige Projektbesprechungen sowie diverse gegenseitige Besuche haben den erzielten
Projektfortschritt sichergestellt. Zusätzlich zu den Projektbesprechungen arbeiten die
Mitarbeiterteam im Projekt an diversen 3D-Scanprojekten. Des Weiteren konnte über die gute
Kooperation der Projektpartner bei dem Scannen des Stephanitorzwinger (Pulverturm Bräutigam) in
Bremen ein weiteres Projekt für denkmal3D akquiriert werden.

3
Arbeitstreffen der Kooperationspartner auf einer Ausgrabung bei Bremen (oben) und Ganderkesee, Niedersachsen(unten)
Ein 3D-Scansystem wurde zunächst an der Jacobs University
Bremen aufgebaut. Dazu benutzen wir den vorhandenen Riegl
VZ-400 Laserscanner und erweitern ihn um eine
hochauflösende Digitalkamera, zur Akquisition von
multimodalen 3D-Daten. Das 3D-Scansystem kann von einem
Notebook gesteuert werden.
Basierend auf existierenden 3D-Scanmatchingmethoden wurde
ein Verfahren implementiert, das es erlaubt, die 3D-Scans ohne
Anwesenheit eines Vermessungstechnikers global präzise zu
verorten. Dadurch lassen sich hochgenaue Befundkarten
erstellen.
Eine weitere Aufgabe war die Entwicklung von 3D-Scan-und
Bilderverarbeitungsalgorithmen zur Markierung von Objekten.
VZ-400 Laserscanner mit montierter Canon Spiegelreflexkamera
4
Dazu wird eine Kamera- / Lasercokalibrierung benötigt.
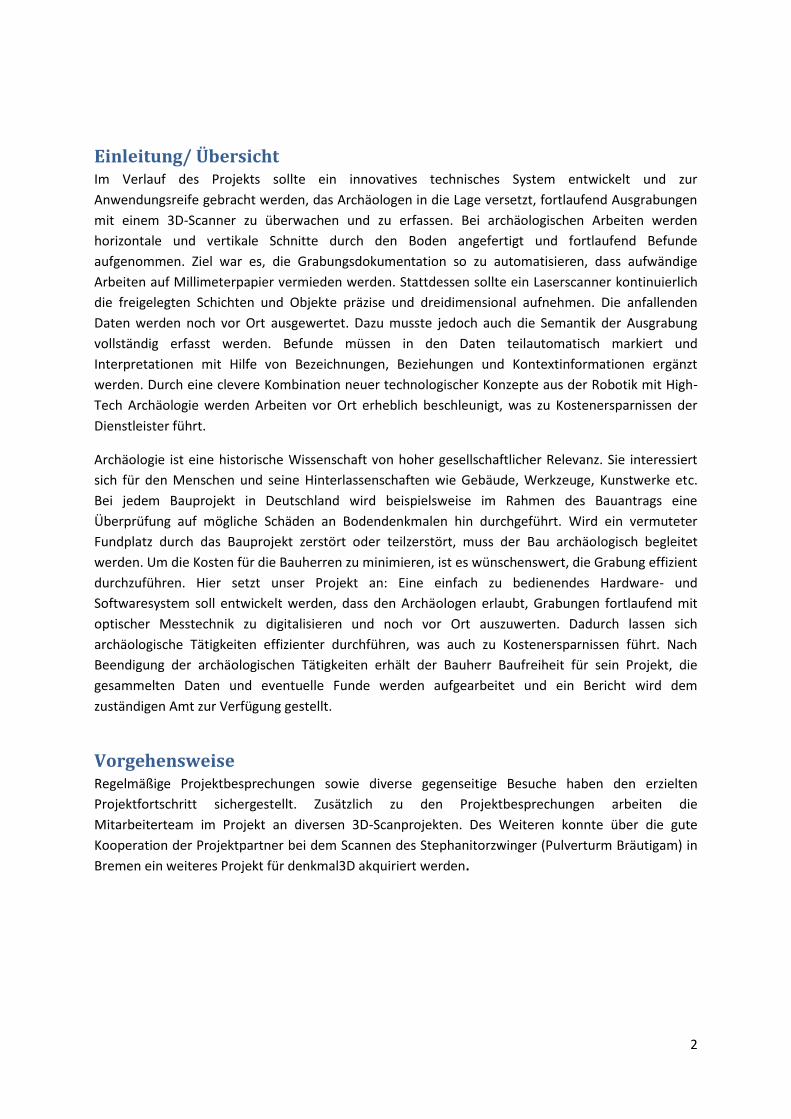
Für verschiedene 3D-Scanner (vgl. Tabelle 1) gibt es von den Herstellern spezielle Zielmarken, die das teil-automatische Verorten der 3D-Scans mit der Herstellersoftware erlauben.
Um das Verfahren mit möglichst allen Scannern einsetzen zu können, gilt es Zielmarken zu wählen, die immer eindeutig im 3D-Scan identifizierbar sind. In einem Testverfahren werden Zielmarken unterschiedlichen Typs dem gleichen Messexperiment bei dem wiederholt derselbe Raum mit denselben Objekten in selbiger Aufstellung mit 3 Laserscannern unterschiedlicher Hersteller (Riegl, Faro, Leica) erfasst werden. Zur Registrierung der Punktwolken werden die ausgewählten Zielmarken untersucht auf:
- Zielgenauigkeit, d.h. wie genau ist der Mittelpunkt der Marke erfassbar
- Reflektion, d.h. wie stark ist die Reflektion des Lasers auf der Zielmarkenoberfläche
- Handhabbarkeit, d.h. wie schwer oder einfach ist die gewählte Zielmarke zu installieren
- Kompatibilität zu den verschiedenen Laserscannern
- Nachmessbarkeit, Überprüfbarkeit der Messgenauigkeiten über den Zielmarkenmittelpunkt durch anschließende Einzelpunktmessung per Tachymeter
Im Rahmen einer Mitarbeiterbefragung wurde die üblich angewandte Dokumentationsweise auf archäologischen Ausgrabungen diskutiert (4 Termine, jeweils freitags, 6., 13. 20. und 27. Juli 10:00 – 12:00 Uhr). Ziel der Evaluation war es, Unterscheidungszeichen der Befundansprache und Datierung herauszuarbeiten, die während der Ausgrabung mit optischen Methoden im Objekterkennungsmodul automatisiert werden können. In der Befragung wurden sowohl grabungstechnische, als auch archäologisch-wissenschaftliche Kriterien berücksichtigt. Am ersten Termin wurden zunächst Beschreibungsansätze in der Befundansprache diskutiert und der für eine automatische Befunderkennung sinnvollste Ansatz herausgearbeitet. Zu den darauf folgenden Terminen wurden entsprechend des Ansatzes Befundkategorien, auf die die Objekterkennung anzuwenden wäre, aufgestellt. Als Grundlage hierfür dienten das „Handbuch der Grabungstechnik“ sowie die „Tabellen und Tafeln zur Grabungstechnik“ von W. Kimmig. Im Nachklang der Befragung galt es, die Semantik der Befunddokumentation nach optischen Kriterien herauszuarbeiten und entsprechend des Arbeitsauftrags Anforderungen an die automatische Objekterkennung zu stellen.
Wiederum anhand einer standardisierten Mitarbeiterbefragung wurde die Mensch-Computer-
Interaktion auf Aspekte der methodischen Beschreibung auf archäologischen Ausgrabung und
Nachbereitung (Auswertung der Grabungsergebnisse, Restaurierung etc.) hin analysiert.
Hierbei wurden folgende Benutzer-Zielgruppen angesprochen:
Wissenschaftliche Grabungsleitung: Archäologe Vor- und Frühgeschichte bzw. Archäologie
des Mittelalters und der Neuzeit
Grabungstechnik: Diplomingenieur für Grabungstechnik bzw. staatlich geprüfter
Grabungstechniker

5
Dokumentation: Für die Dokumentation werden Spezialisten aus verschiedenen verwandten
Bereichen hinzugezogen: Archäotechniker (Abschluss Universität Tübingen), Dipl.-Biologen
(Archäozoologie), Diplomingenieure für Bodenwissenschaften (bodenkundliche
Bestimmungen) o. ä.;
Vermessung – ein Hauptbestandteil einer Grabungsdokumentation: geprüfte
Vermessungstechniker bzw. Diplomingenieure
Aufarbeitung: Restauratoren, Anthropologen, Archäologen
Um die formulierten Aspekte in Bezug auf die Mensch-Computer-Interaktion fallgerecht evaluieren
zu können, wurden die Benutzer-Zielgruppen in ihrer spezifischen Arbeitsumgebung im Rahmen der
von ihnen aktuell betreuten Projekte befragt. Nach der Evaluation der Befragungsergebnisse sind
Besonderheiten in Hinblick auf dokumentarische Unterschiede zwischen Linearen Reihengrabungen,
Feldgrabungen und Stadtkerngrabungen einerseits und Methoden der sog. „klassischen Archäologie“
andererseits diskutiert worden: Die klassische Archäologie hat in ihrer Methodik weitreichende
Überschneidungen mit kunstgeschichtlichen Ansätzen: Hinterlassenschaften griechischer und
römischer Kulturwirkungen (auch in Deutschland; z.B. Xanten, Köln) werden sowohl typologisch-
chronologisch, als auch stilistisch und kulturgeschichtlich dokumentiert und interpretiert. Zur
Beurteilung der klassisch-archäologischen Benutzer-Zielgruppe wurde eine 10 tägige Exkursion in
eines der Kerngebiete der klassischen Archäologie angesetzt. Der Projektmitarbeiter Andreas
Hummel wurde beauftragt mit bekannten Kollegen im Rahmen ihrer Projekte in Italien vor Ort
architektonische und methodische Besonderheiten der klassischen Archäologie zu untersuchen und
praktikable Schnittbereiche zur prähistorischen Archäologie herauszuarbeiten. An unterschiedlichen
Standorten wurden wissenschaftliches und technisches Personal befragt.
6
Ergebnisse
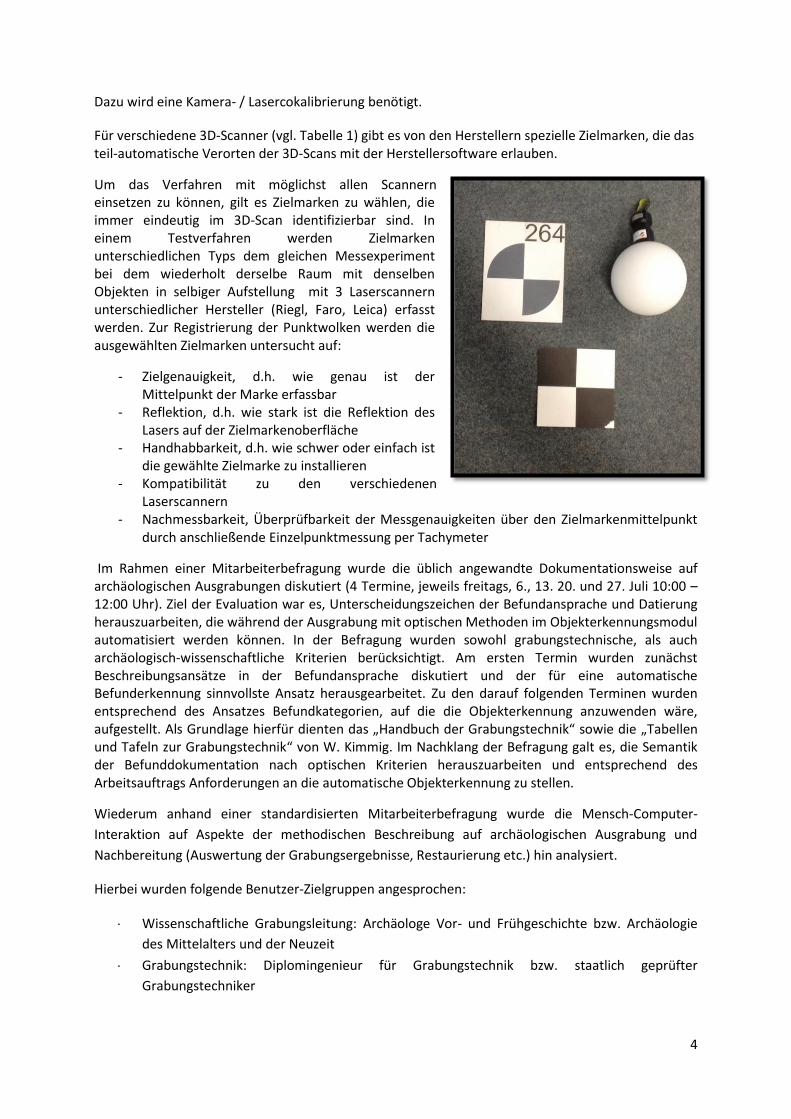
Um erste Erfahrungen mit dem Scansystem zu sammeln, wurde der vorhandene 3D-Scanner (Riegl
VZ-400) mit einer preisgünstigen Kamera (Logitech QuickCam 9000 Pro, 2 Megapixel) verbunden. Es
wurde ein Programm entwickelt ein Programm, das eingefärbte Punktwolken anzeigt. Des Weiteren
wurde eine Canon1000D SLR-kamera mit 18-55mm Objektiv mit dem Scanner verbunden und die
entsprechende Hardwareansteuerung implementiert. Die kalibrierungssofte für Bestimmung der
Abbildungsgeometrie ist einsatzbereit. Die Abbildung zeigt eingefärbte 3D-Punktwolken.
3D-Punktwolke des Bräutigam eingefärbt mit RGB-Werten einer Canon 1000D Spiegelreflexkamera und 18mm Objektiv.
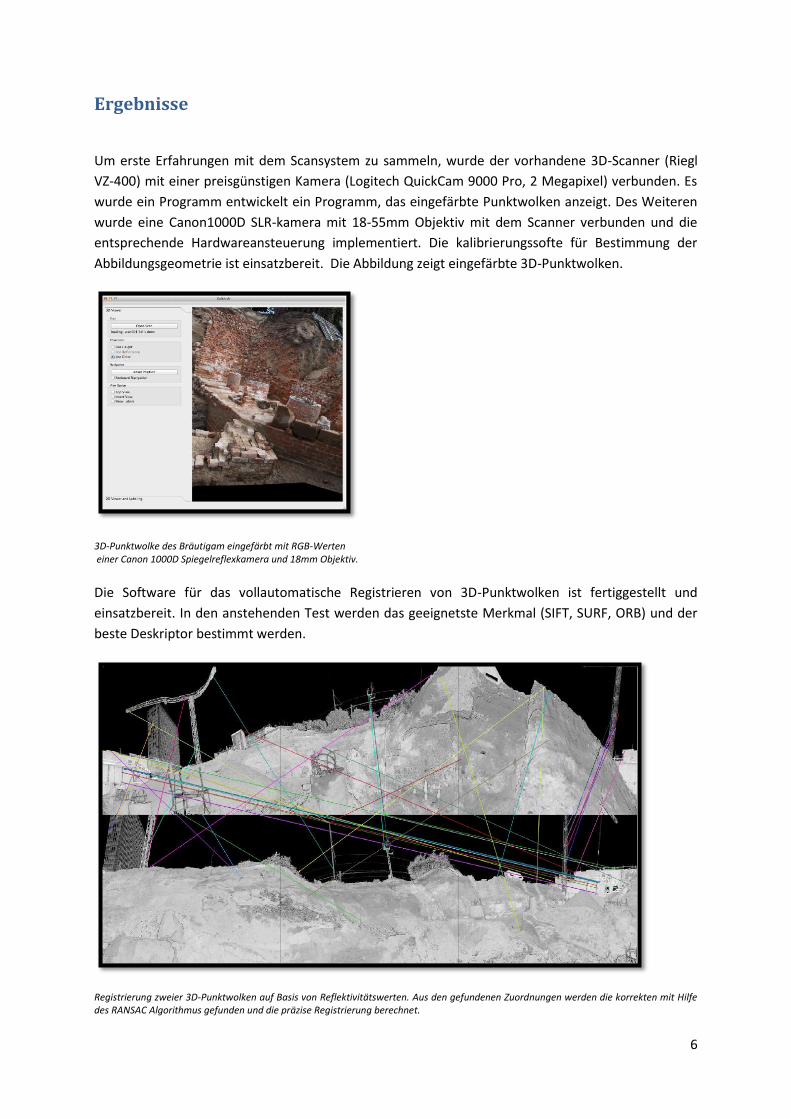
Die Software für das vollautomatische Registrieren von 3D-Punktwolken ist fertiggestellt und
einsatzbereit. In den anstehenden Test werden das geeignetste Merkmal (SIFT, SURF, ORB) und der
beste Deskriptor bestimmt werden.
Registrierung zweier 3D-Punktwolken auf Basis von Reflektivitätswerten. Aus den gefundenen Zuordnungen werden die korrekten mit Hilfe des RANSAC Algorithmus gefunden und die präzise Registrierung berechnet.
7
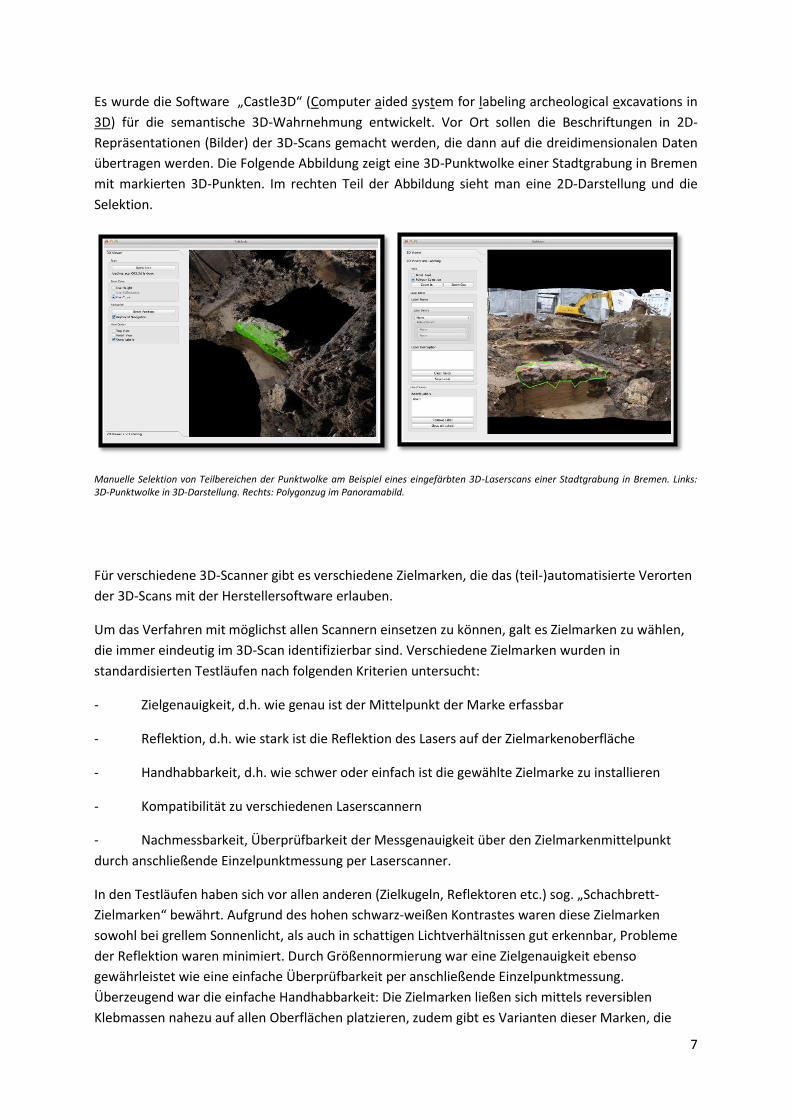
Es wurde die Software „Castle3D“ (Computer aided system for labeling archeological excavations in
3D) für die semantische 3D-Wahrnehmung entwickelt. Vor Ort sollen die Beschriftungen in 2D-
Repräsentationen (Bilder) der 3D-Scans gemacht werden, die dann auf die dreidimensionalen Daten
übertragen werden. Die Folgende Abbildung zeigt eine 3D-Punktwolke einer Stadtgrabung in Bremen
mit markierten 3D-Punkten. Im rechten Teil der Abbildung sieht man eine 2D-Darstellung und die
Selektion.
Manuelle Selektion von Teilbereichen der Punktwolke am Beispiel eines eingefärbten 3D-Laserscans einer Stadtgrabung in Bremen. Links: 3D-Punktwolke in 3D-Darstellung. Rechts: Polygonzug im Panoramabild.
Für verschiedene 3D-Scanner gibt es verschiedene Zielmarken, die das (teil-)automatisierte Verorten
der 3D-Scans mit der Herstellersoftware erlauben.
Um das Verfahren mit möglichst allen Scannern einsetzen zu können, galt es Zielmarken zu wählen,
die immer eindeutig im 3D-Scan identifizierbar sind. Verschiedene Zielmarken wurden in
standardisierten Testläufen nach folgenden Kriterien untersucht:
- Zielgenauigkeit, d.h. wie genau ist der Mittelpunkt der Marke erfassbar
- Reflektion, d.h. wie stark ist die Reflektion des Lasers auf der Zielmarkenoberfläche
- Handhabbarkeit, d.h. wie schwer oder einfach ist die gewählte Zielmarke zu installieren
- Kompatibilität zu verschiedenen Laserscannern
- Nachmessbarkeit, Überprüfbarkeit der Messgenauigkeit über den Zielmarkenmittelpunkt
durch anschließende Einzelpunktmessung per Laserscanner.
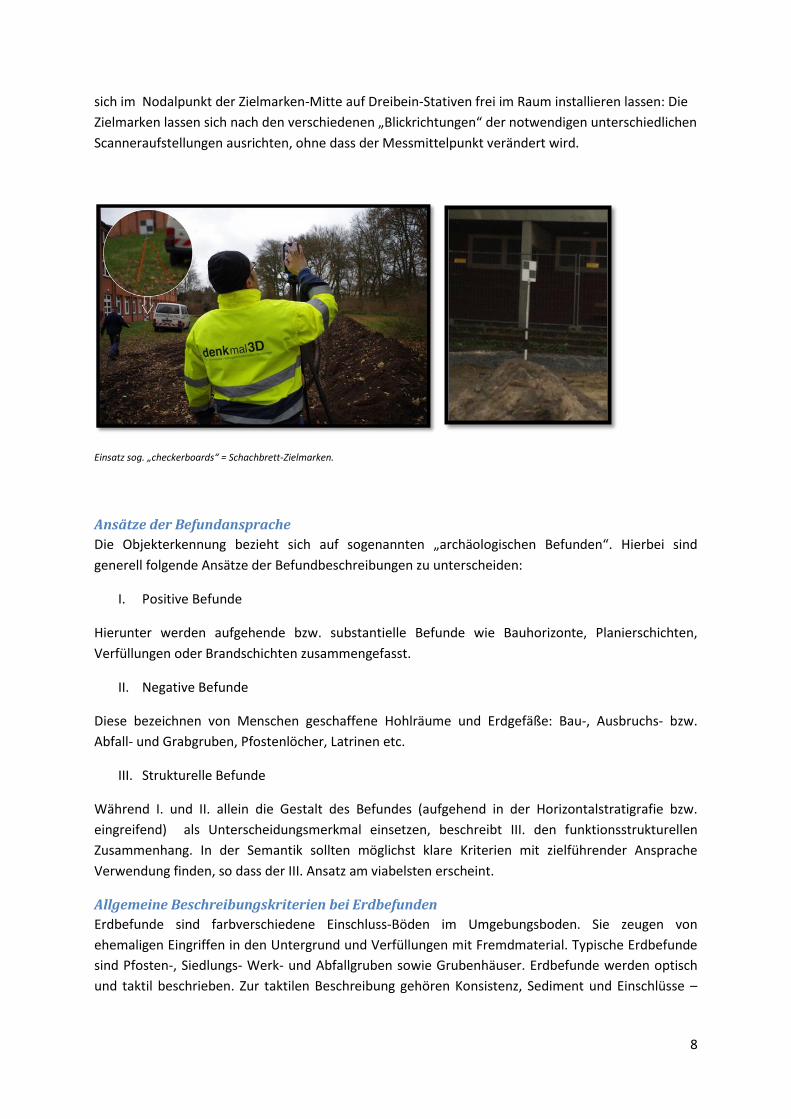
In den Testläufen haben sich vor allen anderen (Zielkugeln, Reflektoren etc.) sog. „Schachbrett-
Zielmarken“ bewährt. Aufgrund des hohen schwarz-weißen Kontrastes waren diese Zielmarken
sowohl bei grellem Sonnenlicht, als auch in schattigen Lichtverhältnissen gut erkennbar, Probleme
der Reflektion waren minimiert. Durch Größennormierung war eine Zielgenauigkeit ebenso
gewährleistet wie eine einfache Überprüfbarkeit per anschließende Einzelpunktmessung.
Überzeugend war die einfache Handhabbarkeit: Die Zielmarken ließen sich mittels reversiblen
Klebmassen nahezu auf allen Oberflächen platzieren, zudem gibt es Varianten dieser Marken, die
8
sich im Nodalpunkt der Zielmarken-Mitte auf Dreibein-Stativen frei im Raum installieren lassen: Die
Zielmarken lassen sich nach den verschiedenen „Blickrichtungen“ der notwendigen unterschiedlichen
Scanneraufstellungen ausrichten, ohne dass der Messmittelpunkt verändert wird.
Einsatz sog. „checkerboards“ = Schachbrett-Zielmarken.
Ansätze der Befundansprache
Die Objekterkennung bezieht sich auf sogenannten „archäologischen Befunden“. Hierbei sind
generell folgende Ansätze der Befundbeschreibungen zu unterscheiden:
I. Positive Befunde
Hierunter werden aufgehende bzw. substantielle Befunde wie Bauhorizonte, Planierschichten,
Verfüllungen oder Brandschichten zusammengefasst.
II. Negative Befunde
Diese bezeichnen von Menschen geschaffene Hohlräume und Erdgefäße: Bau-, Ausbruchs- bzw.
Abfall- und Grabgruben, Pfostenlöcher, Latrinen etc.
III. Strukturelle Befunde
Während I. und II. allein die Gestalt des Befundes (aufgehend in der Horizontalstratigrafie bzw.
eingreifend) als Unterscheidungsmerkmal einsetzen, beschreibt III. den funktionsstrukturellen
Zusammenhang. In der Semantik sollten möglichst klare Kriterien mit zielführender Ansprache
Verwendung finden, so dass der III. Ansatz am viabelsten erscheint.
Allgemeine Beschreibungskriterien bei Erdbefunden
Erdbefunde sind farbverschiedene Einschluss-Böden im Umgebungsboden. Sie zeugen von
ehemaligen Eingriffen in den Untergrund und Verfüllungen mit Fremdmaterial. Typische Erdbefunde
sind Pfosten-, Siedlungs- Werk- und Abfallgruben sowie Grubenhäuser. Erdbefunde werden optisch
und taktil beschrieben. Zur taktilen Beschreibung gehören Konsistenz, Sediment und Einschlüsse –

9
diese werden schwerlich ausreichend vom 3D-Laserscanner, geschweige fotografisch erfasst und
können daher nur schlecht automatisiert in das Objekterkennungsmodul einfließen.
Allgemeine Beschreibungskriterien bei Baubefunden
Im Gegensatz zu den recht einheitlich gearteten Erdbefunden bestehen Baubefunde aus den
unterschiedlichsten Baumaterialien – von Holz über diverse Gesteinsarten bis hin zu Ziegel und Beton
bzw. Mörtel. Ein Vorteil für die Objekterkennung ergibt sich aus der sehr unterschiedlichen
Oberflächenstruktur und den deutlich unterscheidbaren Farbwerten. Eine taktile Beschreibung von
Baubefunden kommt höchsten feinstrukturierten Elementen wie dem im Bau verwendeten Mörtel
zu. Befundansprache: Strukturelle Verortung des Befundes. Neben der Befundbeschreibung ergibt
sich aus dem Lagezusammenhang, dessen Größe und Gestalt eine strukturelle Verortung und damit
die eigentliche Befundansprache.
Stationierung eines Leica-Mittelbereichslaserscanners (links) bzw, eines Riegl-Scanners (rechts) auf einer Stadtkerngrabung in Bremen
Stratigrafie
Im Gegensatz zur Befundansprache wurde die Stratigrafie nicht im Rahmen der Mitarbeiterbefragung
behandelt: Die literarische Grundlage zu diesem Thema ist eindeutig. Zugleich ist die Stratigrafie
mittels Harris-Matrix schematisierbar im Gegensatz zu den zahlreichen Kriterien der
Befundansprache – lediglich vier Unterscheidungskriterien beschreiben umfassend die
stratigrafischen Verhältnisse:
Als archäologische Stratigrafie bezeichnet man die bei einer Ausgrabung in einem vertikalen Profil
feststellbare Abfolge von Straten, die durch natürliche und anthropogene Ablagerungen entstanden
ist und deren Bezugnahmen durch die Ablagerung neuer Schichten auf bereits existierende Schlüsse
geschaffen werden.
Es gibt zwei Schicht-Konturen: Die boundary contours und die surface contours. Erstere sind die
Umrisslinien, die die waagerechte und senkrechte Ausdehnung eines Horizontes beschreiben.
Letztere beschreiben das Relief einer Schicht.
Alle Straten nehmen eine bestimmte Position in der stratigrafischen Sequenz ein. Diese Position
liefert gleichsam die Information zur relativen Chronologie einer Schicht innerhalb der Sequenz. Die
absolute Chronologie einer Schicht kann jedoch nicht ohne datierbare Artefakte bestätigt werden.
Damit können die chronologischen Daten, ihre Position in der stratigraphischen Sequenz nicht
ändern:
10
Straten stehen auf drei verschiedene Weisen räumlich miteinander in Beziehung: Zwei Schichten
können entweder überhaupt keinen direkten Kontakt haben, sich übereinander befinden oder
können als Partien desselben Schlusses auftreten. Chronologisch betrachtet ergeben sich hieraus vier
Unterscheidungskriterien, nach denen die Straten zeitlich miteinander in Beziehung gesetzt werden;
z.B.:
1. Schicht 1 ist jünger als (d.h. liegt über) Schicht 2
2. Schicht 3 ist älter als (d.h. liegt unter) Schicht 2
3. Schicht 4 ist gleichzeitig mit Schicht 2 (hat keinen direkten Kontakt
mit Schicht 2, steht jedoch in gleicher Beziehung mit Schicht 1 und 3
wie Schicht 2)
4. Schicht 5 ist gleich Schicht 4 (Teil desselben Schlusses wie Schicht 4)
Diese Relationen können mithilfe der sogenannten Harris-Matrix dargestellt werden (s. Schaubild).
Evaluation
Bedeutsam ist die archäologische Interpretationsreihe vom jeweils kleinsten Detail (z.B. Planum:
rund, keine Orientierung; Profil: Wandung steilschräg, Ecke gerundet, Basis konkav, Ecke gerundet,
Wandung steilschräg überkippt; Maße: Durchmesser 60 cm, Tiefe 40 cm) zur Gesamtansprache des
Befundes (=>Pfosten) hin zur Lageansprache innerhalb des Befundkomplexes (z.B. 4 m südlich Bf.
Wandpfosten, 2 m südlich Bf. Jochpfosten, 2 m nördlich Bf. Jochpfosten, 4 m nördlich Bf.
Wandpfosten, 2 m östlich Giebelreihe => Firstpfosten in Querreihe)
Anforderungen
Die Objekterkennung erfolgt in erster Linie über die erfassten Messdaten in 3 Dimensionen. Es gilt,
die X-, Y- und Z-Koordinaten in ein semantisches Verhältnis zu bringen, welches den in Abschnitt B
und C beschriebenen Kriterien entspricht. Mit Hilfe des mit dreidimensionalen Messdaten
hinterlegten Orthobildes sollte es für den Operateur möglich sein, die boundary contours der
jeweiligen Schicht bzw. des jeweiligen Befundes festzulegen. In dem nun abgesteckten Bereich sollte
das Programm in der Lage sein über die erfasste Punktwolke eigenständig die surface contours zu
erarbeiten. Aus den damit gewonnenen Spezifikationen des Befundes werden gleichzeitig die
Struktur-Merkmale zur Befundansprache ausgelöst:
1. Befundverlauf (Profil, Planum)
2. Relief/ Oberflächenbeschaffenheit
3. Ausmaße des Befundes
4. Lage im 3D-Raum
Der Operateur wählt die treffendste Ansprache aus – gleichzeitig sollte das Programm in der Lage
sein, die sich aus den Messdaten ergebenen optischen Befundbeschreibungen und strukturellen
Verortungen der Befunde eigenständig schlagwortartig in die Datenbank einzupflegen.
11
Für eine erfolgreiche Prototypentwicklung ist die Anbindung der zurzeit gängigen Scannerhardware
von entscheidender Bedeutung. Traten zunächst technische Probleme bei der Anbindung der
Scanhardware an die entwickelte Software auf, so ließen sich diese jedoch im Rahmen der
Verlängerung bis Ende Juni 2014 lösen: Nach Bereitstellung entsprechender Software Development
Kids (SDKs) der Scanhersteller, wurde deren Funktionsweise mit den Herstellern geklärt und
entsprechend weiterentwickelt. Mittlerweile lassen sich die üblichen von den Herstellern (Riegl,
FARO, Leica, Zoller+Fröhlich) bereitgestellte Datenformate in die Software einlesen und bearbeiten.
Umsetzung der Ergebnisse: Einspeisung des Scans ins Programm
Sowohl für die Steuerbarkeit, als auch für die Fehlerrobustheit wurde die Einspeisung des Scans im
Programm primär so gestaltet, dass der Scan im lokalen Koordinatensystem des Scanners gesetzt
eingepflegt wird, das bedeutet im ursprünglichen Koordinatensystem des Scans.
Alternativ kann die korrekte Positionierung des Scan in castle3D geladen werden. I der Task-Leiste
wird in der ersten Reihe die Position des Scans (x y z) in diesem Koordinatensystem und auf der
zweiten Reihe die Rotation um x und y und z (rx ry rz) zur Kontrollierbarkeit angezeigt.
Umsetzung der Ergebnisse: Navigation innerhalb des Scans
Um eine Handhabbarkeit für verschiedene Anwender zu gewährleisten wurde die Navigation in der
3D-Ansicht in der Form eingerichtet, dass sowohl Maus, als auch Tastatur verwendet werden
können:
Maus-Navigation
Linke Taste – Änderung der Kamera-Rotation
Rechte Taste – Änderung der Kamera-Position
Beide Tasten – Zoom
Mit dem zusätzlichen Halten der „Ctrl-Taste“ lässt sich die Bewegungsgeschwindigkeit drosseln.
Tastatur-Navigation
"w" und "s" – vorwärts und rückwärts
"a" und "d" – rechts und links
"c" und "space" – auf und ab
Um das Scan zu zentralisieren, existiert zudem ein „reset“-Knopf , womit die Perspektive auf die
ursprüngliche Scanner-Position zurückfährt. Eine weitere Option besteht darin über einen
Knopfdruck ins Zentrum des Scans zu gelangen.
12
Umsetzung der Ergebnisse: Bearbeitung und Ausgabe
Die Bearbeitung wurde in der Form umgesetzt, dass die übliche Interpretationsreihe und
Dokumentationsweise der Archäologen berücksichtigt wurden, ohne weitere Anwendungen, z.B. in
der Vermessung, auszuschließen. Die Semantik der Befundkartierung beginnt mit der Definition von
sog. „regions of interest“ (ROI), die den jeweiligen archäologischen Befunden (z.B. bestimmte
Verfüllungsschichten innerhalb einer Grube) entsprechen. Diese werden über Polygonlinien
voneinder abgegrenzt. Das System arbeitet ausschließlich über geschlossene Polygone, um
eindeutige Zuweisungen der Befundgrenzen zur dargestellten Semantik zu garantieren. Da die
Grenzen des definierten Befundes auch immer gleichsam die Grenzen anschließender Befunde
darstellen, besteht die Option, Polylinien entlang bestehender Polygonpunkte anzuknüpfen
(Tools>Extra-View-Options>Merge ROI Points).
Im Falle dass ein zwar nahe gelegener, aber nicht mit einer vorher definierten Befundgrenze
übereinstimmender Punkt angewählt werden soll , ist diese Option wieder schließbar.
Die ROI werden in sogenannte Label zusammengefasst, die einem übergeordneten Befund bzw.
einem Befundkomplex (in dem Beispiel die Grube selbst) entsprechen. Weitere Daten, neben der
eigentlichen Klassifizierung, wie Breite und Höhe des Objektes sind getrennt auswählbar und werden
dem jeweiligen Label zugeordnet. Ein Export als XML-Datei lässt die Daten auf eine Datenbank (im
Fall des Projektes in die Datenbank AdiuvaBit) übertragen, wo sie gespeichert und zur weiteren
Bearbeitung überführt werden können: So gibt die Datenbank AdiuvaBit die in Castle3D erstellten
Polygone als dxf-Datei zur weiteren Bearbeitung in CAD aus.
13
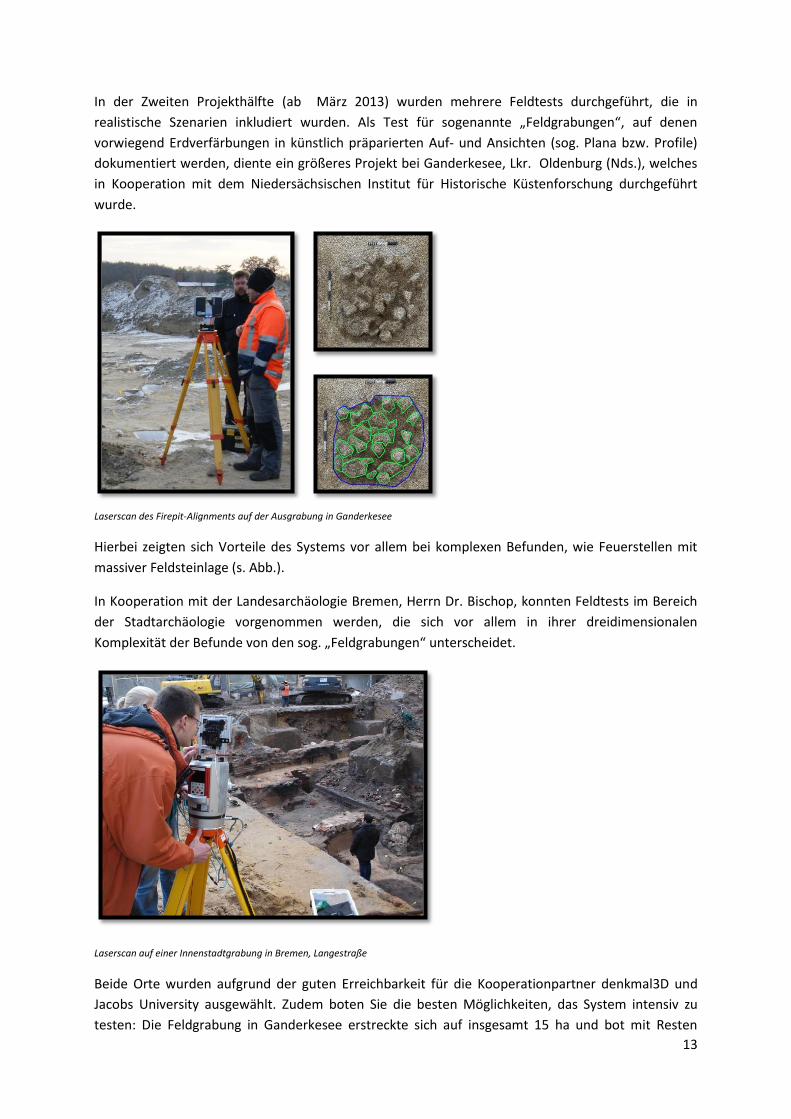
In der Zweiten Projekthälfte (ab März 2013) wurden mehrere Feldtests durchgeführt, die in
realistische Szenarien inkludiert wurden. Als Test für sogenannte „Feldgrabungen“, auf denen
vorwiegend Erdverfärbungen in künstlich präparierten Auf- und Ansichten (sog. Plana bzw. Profile)
dokumentiert werden, diente ein größeres Projekt bei Ganderkesee, Lkr. Oldenburg (Nds.), welches
in Kooperation mit dem Niedersächsischen Institut für Historische Küstenforschung durchgeführt
wurde.
Laserscan des Firepit-Alignments auf der Ausgrabung in Ganderkesee
Hierbei zeigten sich Vorteile des Systems vor allem bei komplexen Befunden, wie Feuerstellen mit
massiver Feldsteinlage (s. Abb.).
In Kooperation mit der Landesarchäologie Bremen, Herrn Dr. Bischop, konnten Feldtests im Bereich
der Stadtarchäologie vorgenommen werden, die sich vor allem in ihrer dreidimensionalen
Komplexität der Befunde von den sog. „Feldgrabungen“ unterscheidet.
Laserscan auf einer Innenstadtgrabung in Bremen, Langestraße
Beide Orte wurden aufgrund der guten Erreichbarkeit für die Kooperationpartner denkmal3D und
Jacobs University ausgewählt. Zudem boten Sie die besten Möglichkeiten, das System intensiv zu
testen: Die Feldgrabung in Ganderkesee erstreckte sich auf insgesamt 15 ha und bot mit Resten
14
zweier eisenzeitlicher Siedlungen sowie entsprechender Gräberfelder sowie einer Kultanlage (sog.
„Firepit-Alignment“) genügend Auswahl, um Castle 3D in unterschiedlichen Anwendungen zu testen.
Durch die fortlaufende Begleitung der Landesarchäologie in Bremen, konnten im Bereich
„Stadtgrabungen“ ebenfalls unterschiedliche Objekte und Anwendungsszenarien getestet werden:
Von Großbefunden, wie dem „Bremer Bräutigam“ (ehem. Pulverturm) bis hin zu schwer erreichbaren
Befundstrukturen bei Kanalarbeiten in bekannten Bremer Böttcherstraße.
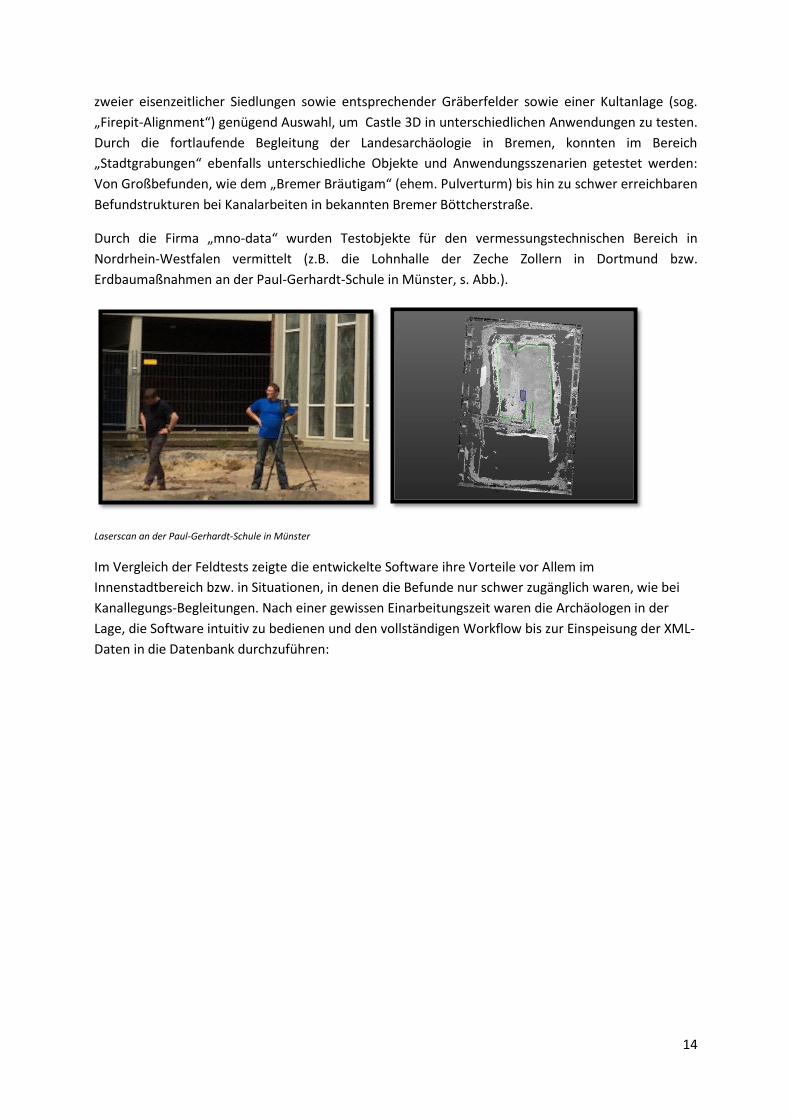
Durch die Firma „mno-data“ wurden Testobjekte für den vermessungstechnischen Bereich in
Nordrhein-Westfalen vermittelt (z.B. die Lohnhalle der Zeche Zollern in Dortmund bzw.
Erdbaumaßnahmen an der Paul-Gerhardt-Schule in Münster, s. Abb.).
Laserscan an der Paul-Gerhardt-Schule in Münster
Im Vergleich der Feldtests zeigte die entwickelte Software ihre Vorteile vor Allem im
Innenstadtbereich bzw. in Situationen, in denen die Befunde nur schwer zugänglich waren, wie bei
Kanallegungs-Begleitungen. Nach einer gewissen Einarbeitungszeit waren die Archäologen in der
Lage, die Software intuitiv zu bedienen und den vollständigen Workflow bis zur Einspeisung der XML-
Daten in die Datenbank durchzuführen:
15
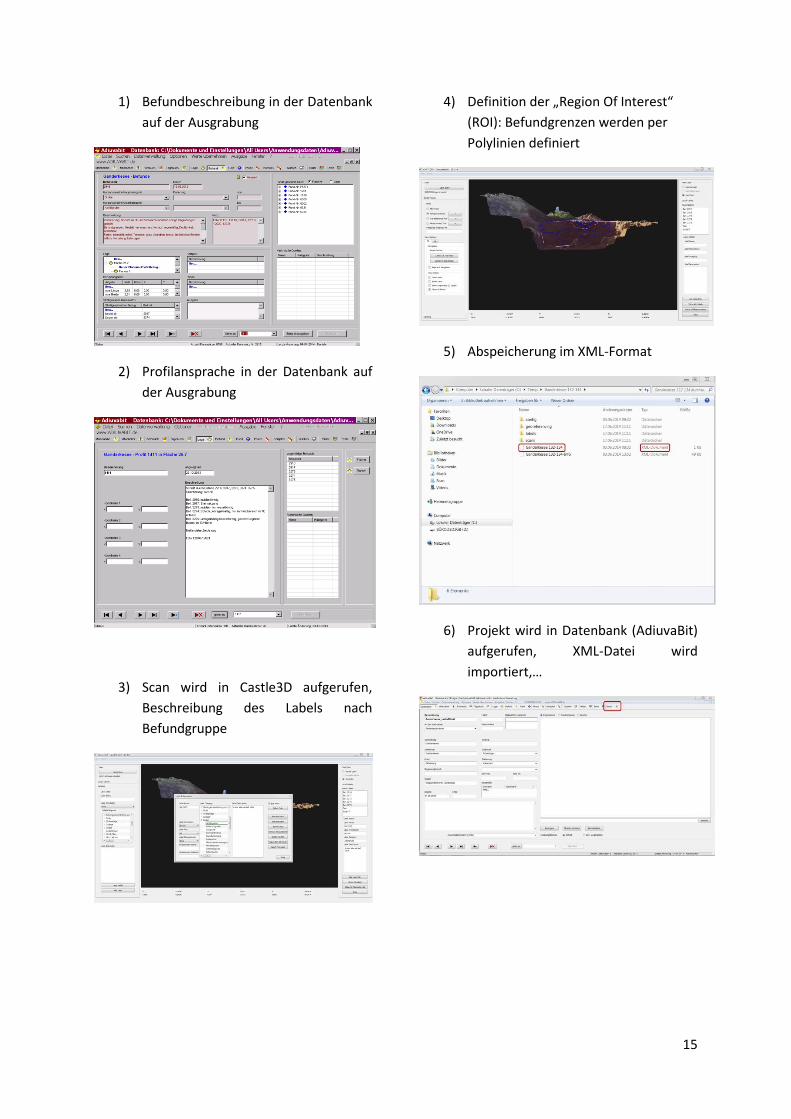
1) Befundbeschreibung in der Datenbank
auf der Ausgrabung
2) Profilansprache in der Datenbank auf
der Ausgrabung
3) Scan wird in Castle3D aufgerufen,
Beschreibung des Labels nach
Befundgruppe
4) Definition der „Region Of Interest“
(ROI): Befundgrenzen werden per
Polylinien definiert
5) Abspeicherung im XML-Format
6) Projekt wird in Datenbank (AdiuvaBit)
aufgerufen, XML-Datei wird
importiert,…
16
7) …Karte wird aufgerufen
8) Kartenexport als dxf-Datei
9) Import in CAD, die Weiterverarbeitung
kann nun in gewohnter Weise
erfolgen.
17
FuE von dritter Seite Die Firma maßwerke GbR hat auch nach ihrer Umfirmierung zu „mno-data GmbH“ ihre
projektbezogenen Aufträge bearbeitet (Wissensverarbeitung vor Ort). Die extrahierten Vektoren
wurden in einem von mno-data entwickelten Interface lagerichtig dargestellt. Der verantwortliche
Archäologe selektiert den von ihm festgelegten und den Befund beschreibenden Umrissvektor
selektieren und diesem durch hierarchisch abhängige Auswahlfelder. Dabei wird ein
benutzerspezifischer Thesaurus verwendet, der auf den Vorgaben der jeweiligen Landesämter beruht
(z.Z. Niedersachsen, NRW). Die verschiedenen Eigenschaften (Benennung, Ansprachen, Funktionen,
etc.) lassen sich zuweisen und exportieren (XML-Format) zuweisen.
Weiter bietet dieses Interface neben der Klassifizierung weitere Anwendungsoptionen bieten:
1. Zur Planung von vorbereitenden Maßnahmen weit im Vorfeld der Ausgrabung ist es hilfreich,
die zu erwartenden Bodenschichten zu kennen und darauf die Ausgrabungstechnik, den
Personal- und Maschineneinsatz abzustimmen.
2. Während der Grabung ist es äußerst vorteilhaft, die Stärke (Schichtdicke) der
archäologischen Schichten einzuschätzen und ihren Verlauf zu prospektieren, um somit das
Bergen der beinhalteten Fundobjekte sachgerecht vorbereiten und das einzusetzende
Werkzeug/Personal vorhalten zu können.
3. Im Zuge der Auswertung der beendeten Grabung ergibt sich durch den fragmentarischen
Blick in den Boden, dessen Ausmaße meist durch Baugruben, Versorgungsleitungen oder
Grundstücksgrenzen definiert sind, nur ein „Flickenteppich“ der historischen Substanz. Diese
zu rekonstruieren, ist Aufgabe des auswertenden Archäologen, die bislang meist textlich
beschreibend erfolgt, die bildliche Darstellung ist ein technisches Desiderat.
Die von Castle3D-System der Jacobs University erzeugten und vom Archäologen inhaltlich
angesprochenen Befundgrenzen können (temporär oder andauernd) vom Archäologen als
zueinander gehörig interpretiert und klassifiziert werden, ihr (verlorener) Verlauf wird vom Interface
dann rekonstruiert. Gleichzeitig wird eine Sicherheit/Wahrscheinlichkeit der Rekonstruktion in
Prozent angegeben.
Aufgrund dieser Schichtenrekonstruktion, die durchaus auch experimentell zur Abklärung von
verschiedenen Rekonstruktionsmöglichkeiten genutzt wird, erhält der Archäologe
vor der Grabung bessere Planungsmöglichkeiten
während der Grabung genauere Informationen zu den wahrscheinlichen Bodenbefunden
nach der Grabung exaktere Möglichkeiten, seine Interpretation zu überprüfen und deren
Ergebnisse darzustellen.
18
Aussichten Castle3D wurde als „stand-alone“ Programm, unabhängig von einer speziellen Datenbank-Software
entwickelt. Das Programm gibt die Möglichkeit, sowohl die herausvektorisierten Befunde aus
Punktwolken, als auch deren Semantik als XML-Datei datenbankkompatibel auszugeben.
Der Vorteil liegt hierbei in der Flexibiltät des Programms in Bezug auf verschiedene
Datenbanksysteme, wie etwa AdiuvaBit, ArchaeDox, NADA etc.
Hieraus folgt jedoch auch eine Grenze in der Automatisierung der Befundansprache, die in dem „one-
way“-Charakter des Programms verankert ist:
Die archäologische Interpretationsreihe erfolgt vom jeweils kleinsten Detail zur Gesamtansprache
des Befundes hin zur Lageansprache innerhalb des Befundkomplexes. Um diesen Vorgang gänzlich
automatisieren zu können, wäre eine direkte Rückkopplung von der genutzten Datenbank ausgehend
zu Castle3D notwendig. Im Gegensatz zur derzeitigen „stand-alone“-Lösung, müsste somit eine
Datenbank-Plattform kreiert werden, auf die Castle3D, die gespeicherten und verknüpften Daten
wiederum für eine vollautomatisierte Befundinterpretation abrufen kann.
Entsprechendes gilt für eine angedachte Automatisierung der Erstellung einer Harris-Matrix aus den
stratigrafischen Verhältnissen verschiedener Befunde zueinander:
Die Objekterkennung erfolgt in erster Linie über die erfassten Messdaten in 3 Dimensionen. Es gilt,
die X-, Y- und Z-Koordinaten in ein semantisches Verhältnis zu bringen. Hierzu müssen jedoch bereits
erhobene Koordinaten zentral gespeichert und mit entsprechenden Verknüpfungen an die
erhobenen semantischen Daten und Bildmaterialien, wie etwa vorangegangen erstellten
Orthobildern aus Castle3D versehen sein. Mit Hilfe des mit dreidimensionalen Messdaten
hinterlegten Orthobildes sollte es für den Operateur – abermals in Rückkopplung mit einer
entsprechenden Datenbak möglich sein, die stratigrafischen boundary contours der jeweiligen
Schicht bzw. des jeweiligen Befundes festzulegen und in einen Vergleich mit der bereits in der
Datenbank gespeicherten Semantik zu stellen. Im Rückgriff auf die Datenbank sollte das Programm in
der Lage sein, über die neu erfasste Punktwolke eigenständig die surface contours zu erarbeiten und
mit bereits festgehaltenen Oberflächenstrukturen zu vergleichen.
Die direkte Koppelung der Castle3D-Software an eine auf die o.g. Aufgabenstellungen zugeschnittene
(web-basierte) Datenbank wäre somit eine sinnvolle Ergänzung des mit diesem Projekt erfolgreich
entwickelten Prototyps, um für die Anwendung in der archäologischen Dokumentation eine neue
Standard-Software-Plattform von der Interpretation vor Ort bis zur Schlussauswertung zu schaffen.
Ein entsprechendes weiterführendes Entwicklungsprojekt wird angestrebt.

19
Wiss. Veröffentlichungen
HamidReza Houshiar, Dorit Borrmann, and Andreas Nüchter. Fortlaufende semantische 3D-
Kartierung von archäologischen Ausgrabungsstätten. in Photogrammetrie Laserscanning Optische
3D-Messtechnik, Beiträge der Oldenburger 3D-Tage 2014, Jade Hochschule, Wichmann Verlag, ISBN
978-3-87907-536-2, pages 268-277, February 2014.
Andreas Nüchter, Radu B. Rusu, Dirk Holz, and Daniel Munoz. Special Issue Volume 62, Issue 5,
Pages 617-706 Semantic Perception, Mapping and Exploration. Journal of Robotics and Autonomous
Systems (JRAS), May 2014.
Andreas Nüchter, Radu B. Rusu, Dirk Holz, and Daniel Munoz. Editorial: Semantic Perception,
Mapping and Exploration. Journal of Robotics and Autonomous Systems (JRAS), Special Issue on
Semantic Perception, Mapping and Exploration, Volume 62, Issue 5, May 2014.
HamidReza Houshiar, Jan Elseberg, Dorit Borrmann, Andreas Nüchter. Panorama Based Point Cloud
Reduction and Registration, Proceedings of the 16th IEEE International Conference on Advanced
Robotics (ICAR '13), Montevideo, Uruguay.
Andreas Nüchter, Jan Elseberg, and Dorit Borrmann. Automation in 3D Laser Scanning -- From an
Automated Tripod towards Optimal 3D Point Clouds from Mobile Laser Scanning. GIM
International, Volume 27, Number 9, September 2013.
HamidReza Houshiar, Jan Elseberg, Dorit Borrmann, Andreas Nüchter, Stephan Winkler, and Falk
Näth. On-site Semantic Mapping of Archeological Excavation Areas, ISPRS Annals Photogrammetry
and Remote Sensing. Spatial Inf. Sci., II-5/W1, 163-168, Strasbourg, France, September 2013