devicenet/canopen-schnittstellen ... - sew-eurodrive
TRANSCRIPT
Antriebssystem für dezentrale InstallationDeviceNet/CANopen-Schnittstellen, -Feldverteiler
Ausgabe
04/2003
Handbuch1056490x / DE
SEW-EURODRIVE
Inhaltsverzeichnis
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 3
1 Gültige Komponenten....................................................................................... 5
2 Wichtige Hinweise............................................................................................. 6
3 Sicherheitshinweise.......................................................................................... 83.1 Sicherheitshinweise für MOVIMOT®-Antriebe .......................................... 83.2 Ergänzende Sicherheitshinweise für Feldverteiler.................................... 9
4 Geräteaufbau ................................................................................................... 104.1 Feldbus-Schnittstellen ............................................................................ 104.2 Typenbezeichnung DeviceNet-Schnittstellen ......................................... 124.3 Typenbezeichnung CANopen-Schnittstellen .......................................... 124.4 Feldverteiler ............................................................................................ 134.5 Typenbezeichnungen DeviceNet-Feldverteiler ....................................... 174.6 Typenbezeichnungen CANopen-Feldverteiler ........................................ 194.7 MOVIMOT®-Frequenzumrichter (integriert in Feldverteiler Z.7/Z.8) ...... 21
5 Mechanische Installation................................................................................ 225.1 Installationsvorschriften .......................................................................... 225.2 Feldbus-Schnittstellen MF../MQ.............................................................. 235.3 Feldverteiler ............................................................................................ 26
6 Elektrische Installation ................................................................................... 326.1 Installationsplanung unter EMV-Gesichtspunkten .................................. 326.2 Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler ............... 346.3 Anschluss mit DeviceNet ........................................................................ 396.4 Anschluss mit CANopen ......................................................................... 476.5 Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ.. 556.6 Anschluss konfektionierte Kabel ............................................................. 59
7 Inbetriebnahme mit DeviceNet (MFD + MQD) ............................................... 617.1 Inbetriebnahmeablauf ............................................................................. 617.2 DeviceNet-Adresse (MAC-ID), Baudrate einstellen ................................ 627.3 Prozessdatenlänge und I/O-Enable einstellen (nur bei MFD)................. 637.4 Prozessdatenlänge einstellen (nur bei MQD) ......................................... 647.5 Konfiguration (Projektierung) des DeviceNet-Masters............................ 657.6 Netzwerk-Inbetriebnahme mit RSNetWorx ............................................. 66
8 Funktion der DeviceNet-Schnittstelle MFD................................................... 698.1 Prozessdaten- und Sensor-/Aktor-Verarbeitung (Polled I/O = PIO)........ 698.2 Aufbau des Ein-/Ausgangsbyte (MFD 21/22) ........................................ 698.3 Aufbau des Ein-/Ausgangsbyte (MFD 32) .............................................. 708.4 Broadcast-Prozessdatenverarbeitung über Bit-Strobe I/O (BIO) ............ 708.5 Funktionen der DIP-Schalter................................................................... 728.6 Bedeutung der LED-Anzeige .................................................................. 738.7 Fehlerzustände ....................................................................................... 78
9 Funktion der DeviceNet-Schnittstelle MQD .................................................. 809.1 Default-Programm................................................................................... 809.2 Konfiguration........................................................................................... 819.3 Steuerung über DeviceNet mit Polled I/O ............................................... 829.4 Idle-Mode der DeviceNet-Schnittstelle.................................................... 829.5 Statusabfrage über Bit-Strobe I/O........................................................... 839.6 Parametrierung über DeviceNet ............................................................. 849.7 Duplicate MAC-ID Detection ................................................................... 879.8 Rückkehr-Codes der Parametrierung ..................................................... 889.9 Bedeutung der LED-Anzeige .................................................................. 899.10 Fehlerzustände ....................................................................................... 94
Inhaltsverzeichnis
4 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
10 Inbetriebnahme mit CANopen........................................................................ 9510.1 Inbetriebnahmeablauf ............................................................................. 9510.2 CANopen Adresse einstellen .................................................................. 9610.3 CANopen Baudrate einstellen................................................................. 9710.4 Prozessdatenlänge und I/O-Enable einstellen........................................ 9710.5 Konfiguration (Projektierung) des CANopen Masters ............................. 98
11 Funktion der CANopen-Schnittstelle MFO.. ................................................. 9911.1 Prozessdaten- und Sensor-/Aktor-Verarbeitung .................................... 9911.2 Aufbau des Ein-/Ausgangsbyte ............................................................ 10011.3 Funktionen der Dip-Schalter ................................................................ 10111.4 Bedeutung der LED-Anzeige ................................................................ 10311.5 Fehlerzustände ..................................................................................... 10511.6 Prozessdatenaustausch........................................................................ 10611.7 MFO-Objektverzeichnis ........................................................................ 107
12 Ergänzende Inbetriebnahmehinweise Feldverteiler .................................. 10812.1 Feldverteiler MF.../Z.6., MQ.../Z.6......................................................... 10812.2 Feldverteiler MF.../MM../Z.7., MQ.../MM../Z.7....................................... 10912.3 Feldverteiler MF.../MM../Z.8., MQ.../MM../Z.8....................................... 11012.4 MOVIMOT®-Frequenzumrichter integriert im Feldverteiler .................. 112
13 Bediengerät MFG11A.................................................................................... 11413.1 Funktion ................................................................................................ 11413.2 Bedienung............................................................................................. 115
14 MOVILINK®-Geräteprofil ............................................................................... 11614.1 Kodierung der Prozessdaten ................................................................ 11614.2 Programmbeispiel in Verbindung mit Simatic S7 und Feldbus ............. 11914.3 Programmbeispiel in Verbindung mit DeviceNet .................................. 121
15 Parameter....................................................................................................... 12515.1 MQ..-Parameterverzeichnis .................................................................. 125
16 Bus-Diagnose mit MOVITOOLS ................................................................... 12716.1 Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle..................... 12716.2 Fehlertabelle Feldbus-Schnittstellen..................................................... 133
17 MOVIMOT®-Diagnose ................................................................................... 13417.1 Status-LED............................................................................................ 13417.2 Fehlertabelle ......................................................................................... 135
18 Technische Daten ......................................................................................... 13618.1 Technische Daten DeviceNet-Schnittstelle MFD.. ................................ 13618.2 Technische Daten DeviceNet-Schnittstelle MQD.. ............................... 13718.3 Technische Daten CANopen-Schnittstelle MFO................................... 13818.4 Technische Daten Feldverteiler ............................................................ 13918.5 Statement of Conformance (Kompatibilitätserklärung)
für DeviceNet interface MFD2x ............................................................ 14218.6 Statement of Conformance (Kompatibilitätserklärung)
für DeviceNet interface MFD3X ........................................................... 15118.7 Statement of Conformance (Kompatibilitätserklärung)
für DeviceNet interface MQD2X........................................................... 16018.8 Statement of Conformance (Kompatibilitätserklärung)
für DeviceNet interface MQD3X........................................................... 169
Index............................................................................................................... 178
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 5
1
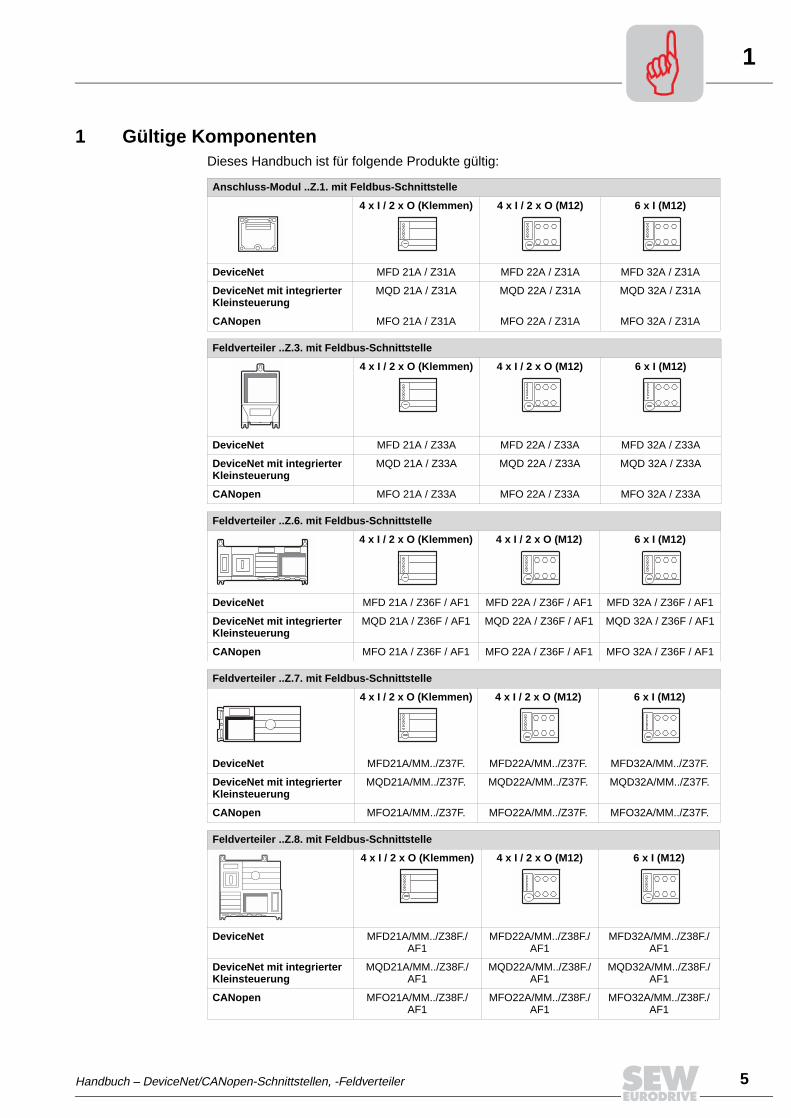
1 Gültige KomponentenDieses Handbuch ist für folgende Produkte gültig:
Anschluss-Modul ..Z.1. mit Feldbus-Schnittstelle
4 x I / 2 x O (Klemmen) 4 x I / 2 x O (M12) 6 x I (M12)
DeviceNet MFD 21A / Z31A MFD 22A / Z31A MFD 32A / Z31A
DeviceNet mit integrierter Kleinsteuerung
MQD 21A / Z31A MQD 22A / Z31A MQD 32A / Z31A
CANopen MFO 21A / Z31A MFO 22A / Z31A MFO 32A / Z31A
Feldverteiler ..Z.3. mit Feldbus-Schnittstelle
4 x I / 2 x O (Klemmen) 4 x I / 2 x O (M12) 6 x I (M12)
DeviceNet MFD 21A / Z33A MFD 22A / Z33A MFD 32A / Z33A
DeviceNet mit integrierter Kleinsteuerung
MQD 21A / Z33A MQD 22A / Z33A MQD 32A / Z33A
CANopen MFO 21A / Z33A MFO 22A / Z33A MFO 32A / Z33A
Feldverteiler ..Z.6. mit Feldbus-Schnittstelle
4 x I / 2 x O (Klemmen) 4 x I / 2 x O (M12) 6 x I (M12)
DeviceNet MFD 21A / Z36F / AF1 MFD 22A / Z36F / AF1 MFD 32A / Z36F / AF1
DeviceNet mit integrierter Kleinsteuerung
MQD 21A / Z36F / AF1 MQD 22A / Z36F / AF1 MQD 32A / Z36F / AF1
CANopen MFO 21A / Z36F / AF1 MFO 22A / Z36F / AF1 MFO 32A / Z36F / AF1
Feldverteiler ..Z.7. mit Feldbus-Schnittstelle
4 x I / 2 x O (Klemmen) 4 x I / 2 x O (M12) 6 x I (M12)
DeviceNet MFD21A/MM../Z37F. MFD22A/MM../Z37F. MFD32A/MM../Z37F.
DeviceNet mit integrierter Kleinsteuerung
MQD21A/MM../Z37F. MQD22A/MM../Z37F. MQD32A/MM../Z37F.
CANopen MFO21A/MM../Z37F. MFO22A/MM../Z37F. MFO32A/MM../Z37F.
Feldverteiler ..Z.8. mit Feldbus-Schnittstelle
4 x I / 2 x O (Klemmen) 4 x I / 2 x O (M12) 6 x I (M12)
DeviceNet MFD21A/MM../Z38F./AF1
MFD22A/MM../Z38F./AF1
MFD32A/MM../Z38F./AF1
DeviceNet mit integrierter Kleinsteuerung
MQD21A/MM../Z38F./AF1
MQD22A/MM../Z38F./AF1
MQD32A/MM../Z38F./AF1
CANopen MFO21A/MM../Z38F./AF1
MFO22A/MM../Z38F./AF1
MFO32A/MM../Z38F./AF1
2
6 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
2 Wichtige HinweiseSicherheits- und Warnhinweise
Beachten Sie unbedingt die in dieser Druckschrift enthaltenen Sicherheits- und Warn-hinweise!
Mitgeltende Unterlagen
• Betriebsanleitung "MOVIMOT® MM03C bis MM3XC"
• Betriebsanleitung "Drehstrommotoren DR/DT/DV, Asynchrone Servomotoren CT/CV "
• Bei Verwendung von MOVIMOT® oder Feldverteilern in Sicherheitsanwendun-gen muss die ergänzende Druckschrift "Sichere Abschaltung für MOVIMOT®"beachtet werden. Es dürfen nur Komponenten in Sicherheitsanwendungeneingesetzt werden, die von SEW-EURODRIVE ausdrücklich in dieser Ausfüh-rung geliefert wurden!
Bestimmungs-gemäße Verwen-dung
• MOVIMOT®-Antriebe sind für gewerbliche Anlagen bestimmt. Sie entsprechen dengültigen Normen und Vorschriften und erfüllen die Forderungen der Niederspan-nungsrichtlinie 73/23/EWG.
• MOVIMOT® ist für Hubwerksanwendungen nur eingeschränkt geeignet!
• Technische Daten sowie Angaben zu den zulässigen Bedingungen am Einsatzortfinden Sie auf dem Leistungsschild und in dieser Betriebsanleitung.
• Diese Angaben müssen unbedingt eingehalten werden!
• Die Inbetriebnahme (Aufnahme des bestimmungsgemäßen Betriebs) ist solange un-tersagt, bis festgestellt ist, dass die Maschine die EMV-Richtlinie 89/336/EWG ein-hält und die Konformität des Endproduktes mit der Maschinenrichtlinie 89/392/EWGfeststeht (EN 60204 beachten).
Drohende Gefahr durch StromMögliche Folgen: Tod oder schwerste Verletzungen.
Drohende Gefahr. Mögliche Folgen: Tod oder schwerste Verletzungen.
Gefährliche Situation.Mögliche Folgen: Leichte oder geringfügige Verletzungen.
Schädliche Situation.Mögliche Folgen: Beschädigung des Gerätes und der Umgebung.
Anwendungstipps und nützliche Informationen.
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 7
2
Einsatzumge-bung
Verboten sind, wenn nicht ausdrücklich dafür vorgesehen:
• der Einsatz in explosionsgeschützten Bereichen
• der Einsatz in Umgebungen mit schädlichen Ölen, Säuren, Gasen, Dämpfen, Stäu-ben, Strahlungen usw.
• der Einsatz in nichtstationären Anwendungen, bei denen über die Anforderungen derEN50178 hinausgehende mechanische Schwingungs- und Stoßbelastungen auftre-ten
• der Einsatz in Anwendungen, bei denen der MOVIMOT®-Umrichter allein (ohneübergeordnete Sicherheitssysteme) Sicherheitsfunktionen wahrnimmt, die Maschi-nen- und Personenschutz gewährleisten müssen
Entsorgung Dieses Produkt besteht aus:
• Eisen
• Aluminium
• Kupfer
• Kunststoff
• Elektronikbauteilen
Entsorgen Sie die Teile entsprechend den gültigen Vorschriften!
3
8 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Sicherheitshinweise für MOVIMOT®-Antriebe
3 Sicherheitshinweise
3.1 Sicherheitshinweise für MOVIMOT®-Antriebe
• Niemals beschädigte Produkte installieren oder in Betrieb nehmen. Beschädigungenbitte umgehend beim Transportunternehmen reklamieren.
• Installations-, Inbetriebnahme- und Servicearbeiten dürfen nur von Elektro-Fachper-sonal mit einschlägiger Unfallverhütungs-Ausbildung unter Beachtung der gültigenVorschriften (z.B. EN 60204, VBG 4, DIN-VDE 0100/0113/ 0160) vorgenommenwerden.
• Schutzmaßnahmen und Schutzeinrichtungen müssen den gültigen Vorschriften ent-sprechen (z.B. EN 60204 oder EN 50178).
Notwendige Schutzmaßnahme: Erdung des MOVIMOT® und des Feldverteilers.
• Das Gerät erfüllt alle Anforderungen für die sichere Trennung von Leistungs- undElektronik-Anschlüssen gemäß EN 50178. Um die sichere Trennung zu gewährleis-ten, müssen alle angeschlossenen Stromkreise ebenfalls den Anforderungen für diesichere Trennung genügen.
• Vor Entfernen des MOVIMOT®-Umrichters ist dieser vom Netz zu trennen. Gefährli-che Spannungen können noch bis zu 1 Minute nach Netzabschaltung vorhandensein.
• Sobald Netzspannung am MOVIMOT® oder Feldverteiler anliegt, muss der An-schlusskasten bzw. Feldverteiler geschlossen und der MOVIMOT®-Umrichter ange-schraubt sein.
• Das Verlöschen der Betriebs-LED und anderer Anzeigeelemente ist kein Indikatordafür, dass das Gerät vom Netz getrennt und spannungslos ist.
• Mechanisches Blockieren oder geräteinterne Sicherheitsfunktionen können einenMotorstillstand zur Folge haben. Die Behebung der Störungsursache oder ein Resetkönnen dazu führen, dass der Motor selbsttätig wieder anläuft. Ist dies für die ange-triebene Maschine aus Sicherheitsgründen nicht zulässig, ist vor Störungsbehebungder MOVIMOT®-Umrichter vom Netz zu trennen.
• Achtung Verbrennungsgefahr: Die Oberflächentemperatur des MOVIMOT®-Umrich-ters (insbesondere des Kühlkörpers) kann während des Betriebs mehr als 60 °C be-tragen!
• Bei Verwendung von MOVIMOT® oder Feldverteilern in Sicherheitsanwendungenmuss die ergänzende Druckschrift "Sichere Abschaltung für MOVIMOT®" beachtetwerden. Es dürfen nur Komponenten in Sicherheitsanwendungen eingesetzt wer-den, die von SEW-EURODRIVE ausdrücklich in dieser Ausführung geliefert wurden!
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 9
3Ergänzende Sicherheitshinweise für Feldverteiler
3.2 Ergänzende Sicherheitshinweise für Feldverteiler
MFZ.3. • Vor Entfernen des Busmoduls oder des Motorsteckers ist das Gerät vom Netz zutrennen. Gefährliche Spannungen können noch bis zu 1 Minute nach Netzabschal-tung vorhanden sein.
• Während des Betriebs müssen das Busmodul sowie der Stecker des Hybridkabelsauf den Feldverteiler gesteckt und angeschraubt sein.
MFZ.6. • Vor Entfernen des Anschlusskastendeckels für den Netzanschluss ist das Gerät vomNetz zu trennen. Gefährliche Spannungen können noch bis zu 1 Minute nach Netz-abschaltung vorhanden sein.
• Achtung: Der Schalter trennt nur das MOVIMOT® vom Netz. Die Klemmen des Feld-verteilers sind nach Betätigen des Wartungsschalters weiterhin mit dem Netz ver-bunden.
• Während des Betriebs müssen der Anschlusskastendeckel für den Netzanschlusssowie der Stecker des Hybridkabels auf den Feldverteiler gesteckt und ange-schraubt sein.
MFZ.7. • Vor Entfernen des MOVIMOT®-Umrichters ist das Gerät vom Netz zu trennen. Ge-fährliche Spannungen können noch bis zu 1 Minute nach Netzabschaltung vorhan-den sein.
• Während des Betriebs müssen der MOVIMOT®-Umrichter sowie der Stecker desHybridkabels auf den Feldverteiler gesteckt und angeschraubt sein.
MFZ.8. • Vor Entfernen des Anschlusskastendeckels für den Netzanschluss bzw. desMOVIMOT®-Umrichters ist das Gerät vom Netz zu trennen. Gefährliche Spannun-gen können noch bis zu 1 Minute nach Netzabschaltung vorhanden sein.
• Achtung: Der Wartungsschalter trennt nur den angeschlossenen Motor vom Netz.Die Klemmen des Feldverteilers sind nach Betätigen des Wartungsschalters weiter-hin mit dem Netz verbunden.
• Während des Betriebs müssen der Anschlusskastendeckel für den Netzanschluss,der MOVIMOT®-Umrichter sowie der Stecker des Hybridkabels auf den Feldverteilergesteckt und angeschraubt sein.
4
10 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldbus-Schnittstellen
4 Geräteaufbau4.1 Feldbus-Schnittstellen
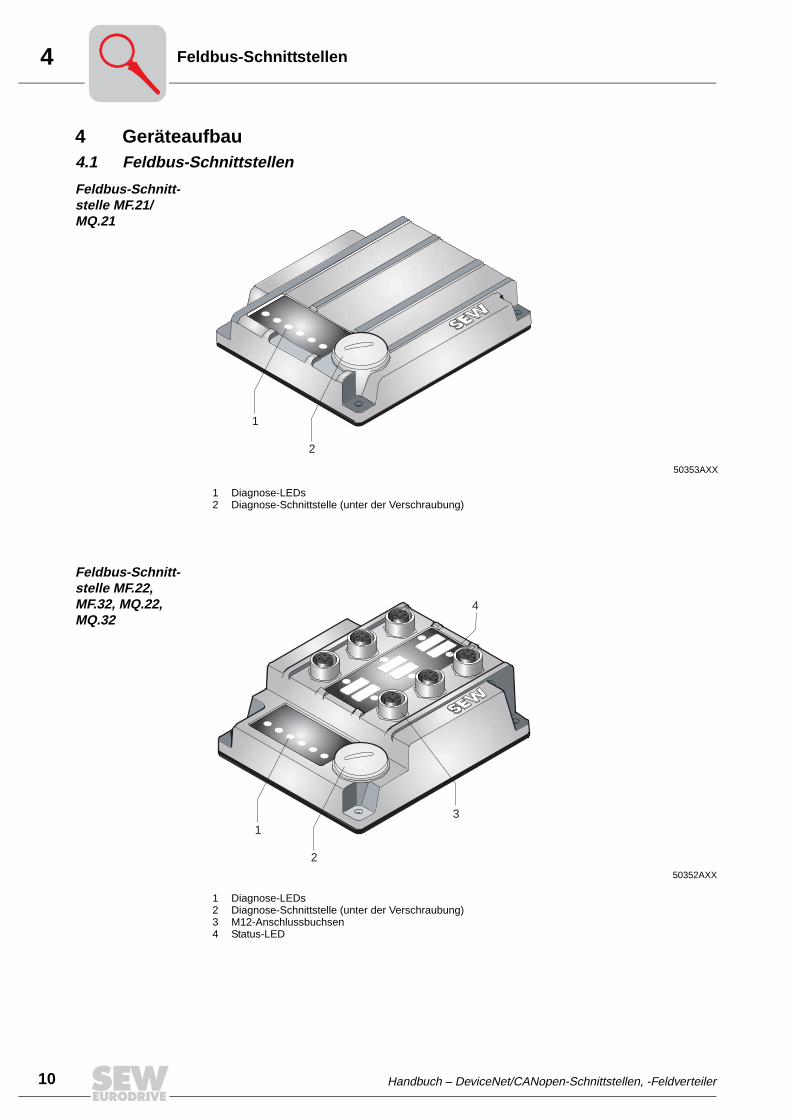
Feldbus-Schnitt-stelle MF.21/MQ.21
Feldbus-Schnitt-stelle MF.22, MF.32, MQ.22, MQ.32
50353AXX
1 Diagnose-LEDs2 Diagnose-Schnittstelle (unter der Verschraubung)
1
2
50352AXX
1 Diagnose-LEDs2 Diagnose-Schnittstelle (unter der Verschraubung)3 M12-Anschlussbuchsen4 Status-LED
1
2
3
4
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 11
4Feldbus-Schnittstellen
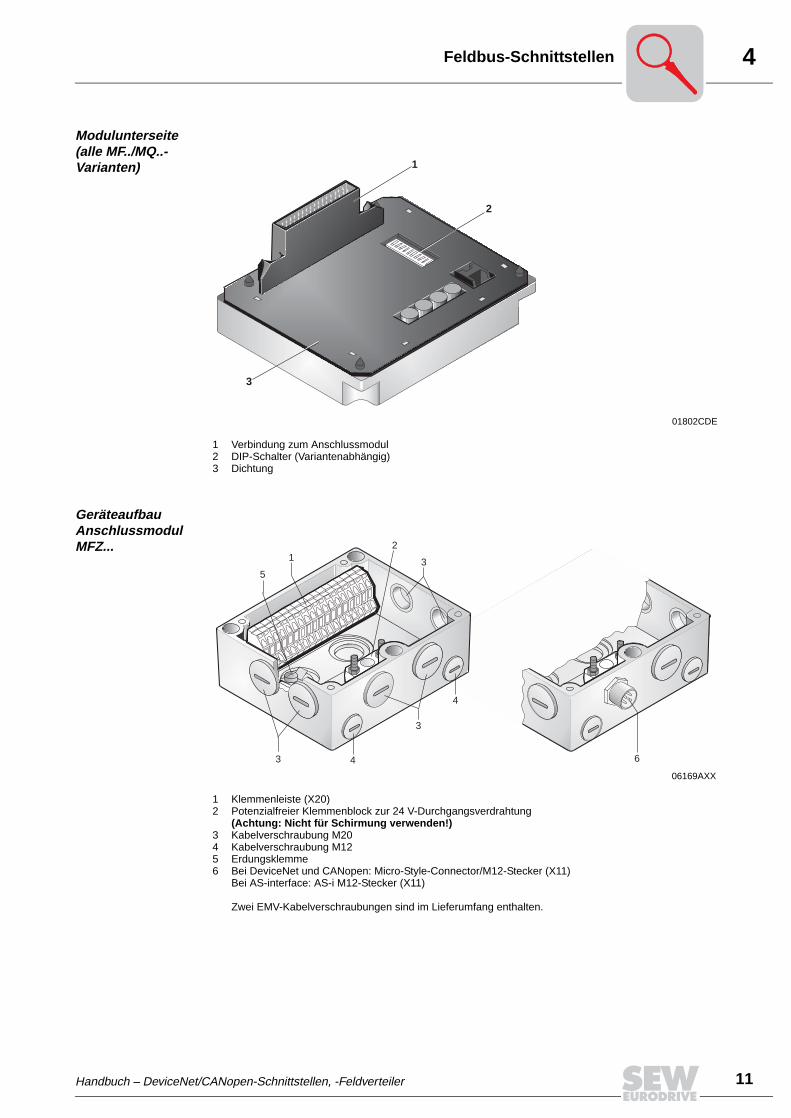
Modulunterseite (alle MF../MQ..-Varianten)
Geräteaufbau Anschlussmodul MFZ...
01802CDE
1 Verbindung zum Anschlussmodul2 DIP-Schalter (Variantenabhängig)3 Dichtung
2
3
1
06169AXX
1 Klemmenleiste (X20)2 Potenzialfreier Klemmenblock zur 24 V-Durchgangsverdrahtung
(Achtung: Nicht für Schirmung verwenden!)3 Kabelverschraubung M204 Kabelverschraubung M125 Erdungsklemme6 Bei DeviceNet und CANopen: Micro-Style-Connector/M12-Stecker (X11)
Bei AS-interface: AS-i M12-Stecker (X11)
Zwei EMV-Kabelverschraubungen sind im Lieferumfang enthalten.
63
5
4
3
4
2
31
4
12 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Typenbezeichnung DeviceNet-Schnittstellen
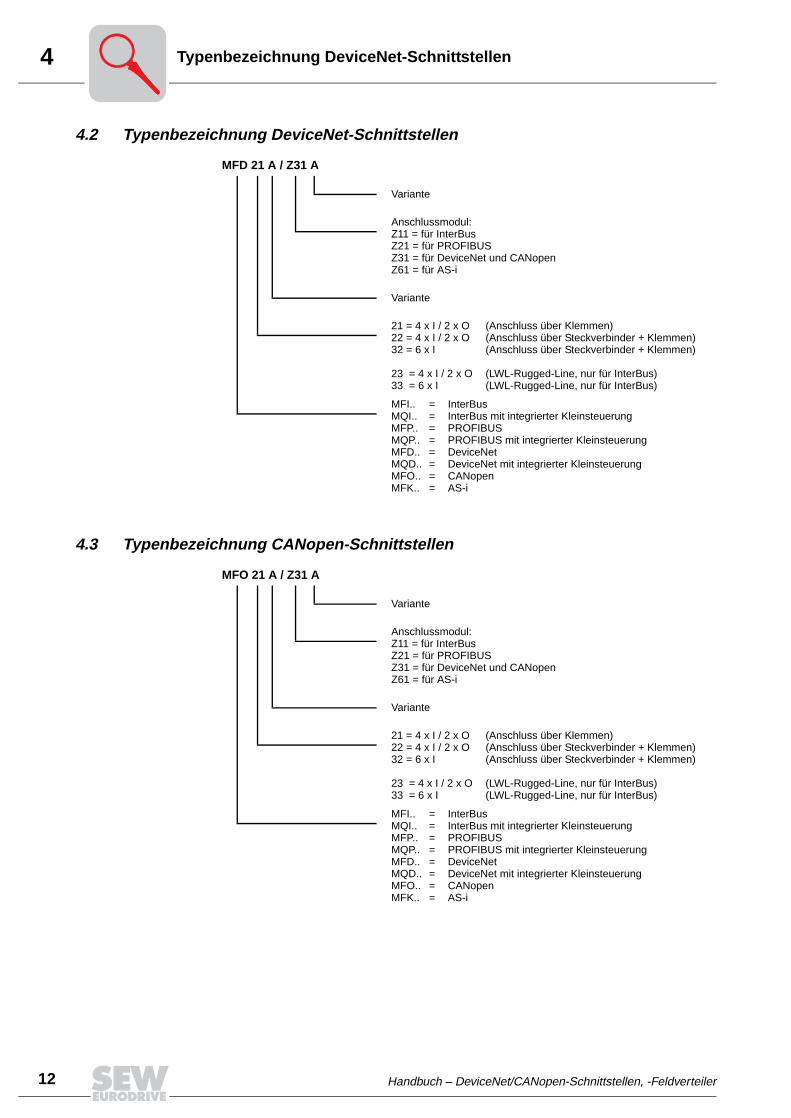
4.2 Typenbezeichnung DeviceNet-Schnittstellen
4.3 Typenbezeichnung CANopen-Schnittstellen
MFD 21 A / Z31 A
Variante
Anschlussmodul:Z11 = für InterBusZ21 = für PROFIBUSZ31 = für DeviceNet und CANopenZ61 = für AS-i
Variante
21 = 4 x I / 2 x O (Anschluss über Klemmen)22 = 4 x I / 2 x O (Anschluss über Steckverbinder + Klemmen)32 = 6 x I (Anschluss über Steckverbinder + Klemmen)
23 = 4 x I / 2 x O (LWL-Rugged-Line, nur für InterBus)33 = 6 x I (LWL-Rugged-Line, nur für InterBus)
MFI.. = InterBusMQI.. = InterBus mit integrierter KleinsteuerungMFP.. = PROFIBUSMQP.. = PROFIBUS mit integrierter KleinsteuerungMFD.. = DeviceNetMQD.. = DeviceNet mit integrierter KleinsteuerungMFO.. = CANopenMFK.. = AS-i
MFO 21 A / Z31 A
Variante
Anschlussmodul:Z11 = für InterBusZ21 = für PROFIBUSZ31 = für DeviceNet und CANopenZ61 = für AS-i
Variante
21 = 4 x I / 2 x O (Anschluss über Klemmen)22 = 4 x I / 2 x O (Anschluss über Steckverbinder + Klemmen)32 = 6 x I (Anschluss über Steckverbinder + Klemmen)
23 = 4 x I / 2 x O (LWL-Rugged-Line, nur für InterBus)33 = 6 x I (LWL-Rugged-Line, nur für InterBus)
MFI.. = InterBusMQI.. = InterBus mit integrierter KleinsteuerungMFP.. = PROFIBUSMQP.. = PROFIBUS mit integrierter KleinsteuerungMFD.. = DeviceNetMQD.. = DeviceNet mit integrierter KleinsteuerungMFO.. = CANopenMFK.. = AS-i
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 13
4Feldverteiler
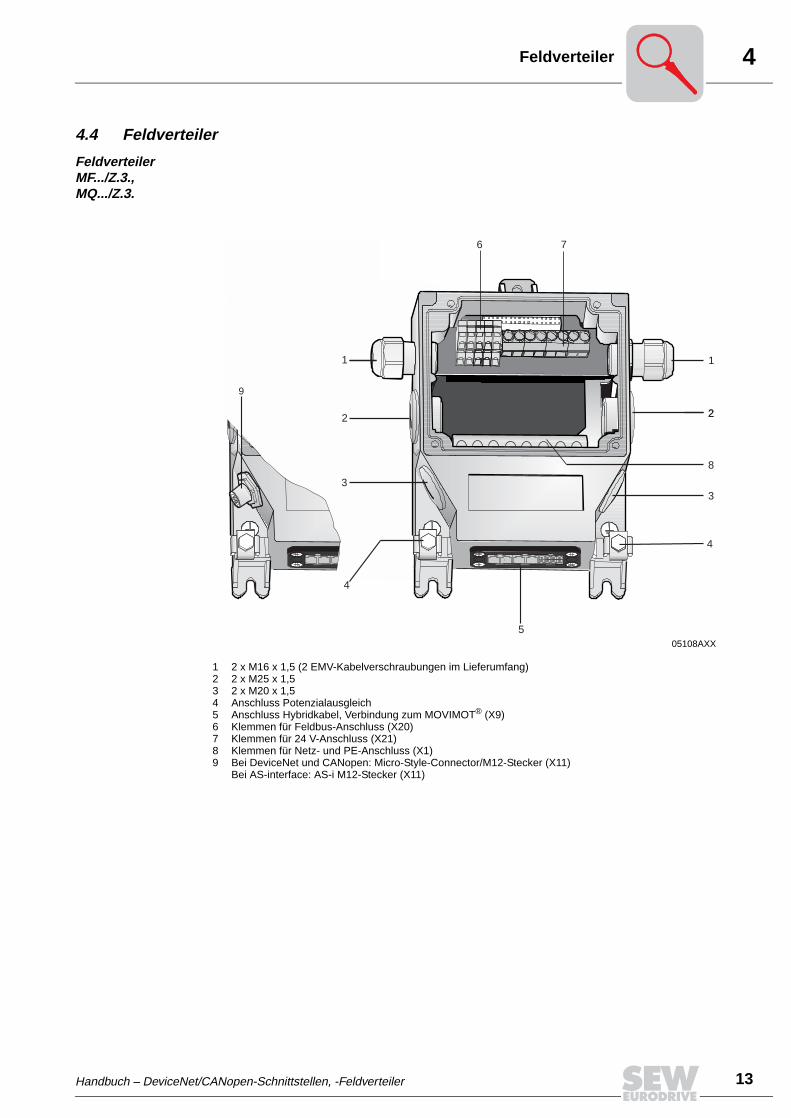
4.4 Feldverteiler
Feldverteiler MF.../Z.3., MQ.../Z.3.
05108AXX
1 2 x M16 x 1,5 (2 EMV-Kabelverschraubungen im Lieferumfang)2 2 x M25 x 1,5 3 2 x M20 x 1,54 Anschluss Potenzialausgleich5 Anschluss Hybridkabel, Verbindung zum MOVIMOT® (X9)6 Klemmen für Feldbus-Anschluss (X20)7 Klemmen für 24 V-Anschluss (X21)8 Klemmen für Netz- und PE-Anschluss (X1)9 Bei DeviceNet und CANopen: Micro-Style-Connector/M12-Stecker (X11)
Bei AS-interface: AS-i M12-Stecker (X11)
9
1
2
3
4
1
22
3
4
8
6 7
5
4
14 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler
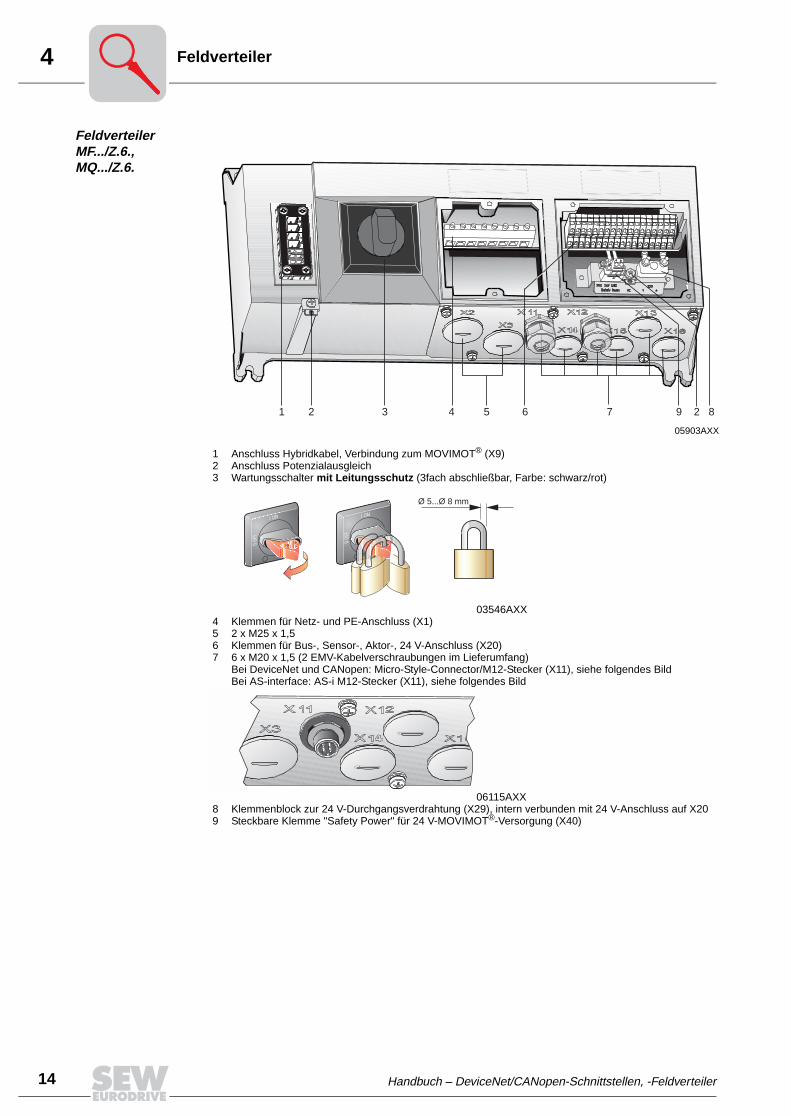
Feldverteiler MF.../Z.6., MQ.../Z.6.
05903AXX
1 Anschluss Hybridkabel, Verbindung zum MOVIMOT® (X9)2 Anschluss Potenzialausgleich3 Wartungsschalter mit Leitungsschutz (3fach abschließbar, Farbe: schwarz/rot)
03546AXX4 Klemmen für Netz- und PE-Anschluss (X1)5 2 x M25 x 1,56 Klemmen für Bus-, Sensor-, Aktor-, 24 V-Anschluss (X20)7 6 x M20 x 1,5 (2 EMV-Kabelverschraubungen im Lieferumfang)
Bei DeviceNet und CANopen: Micro-Style-Connector/M12-Stecker (X11), siehe folgendes BildBei AS-interface: AS-i M12-Stecker (X11), siehe folgendes Bild
06115AXX8 Klemmenblock zur 24 V-Durchgangsverdrahtung (X29), intern verbunden mit 24 V-Anschluss auf X209 Steckbare Klemme "Safety Power" für 24 V-MOVIMOT®-Versorgung (X40)
1 2 3 4 5 6 7 9 2 8
I ON I ON
0 OF
F
0 OF
F
Ø 5...Ø 8 mm
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 15
4Feldverteiler
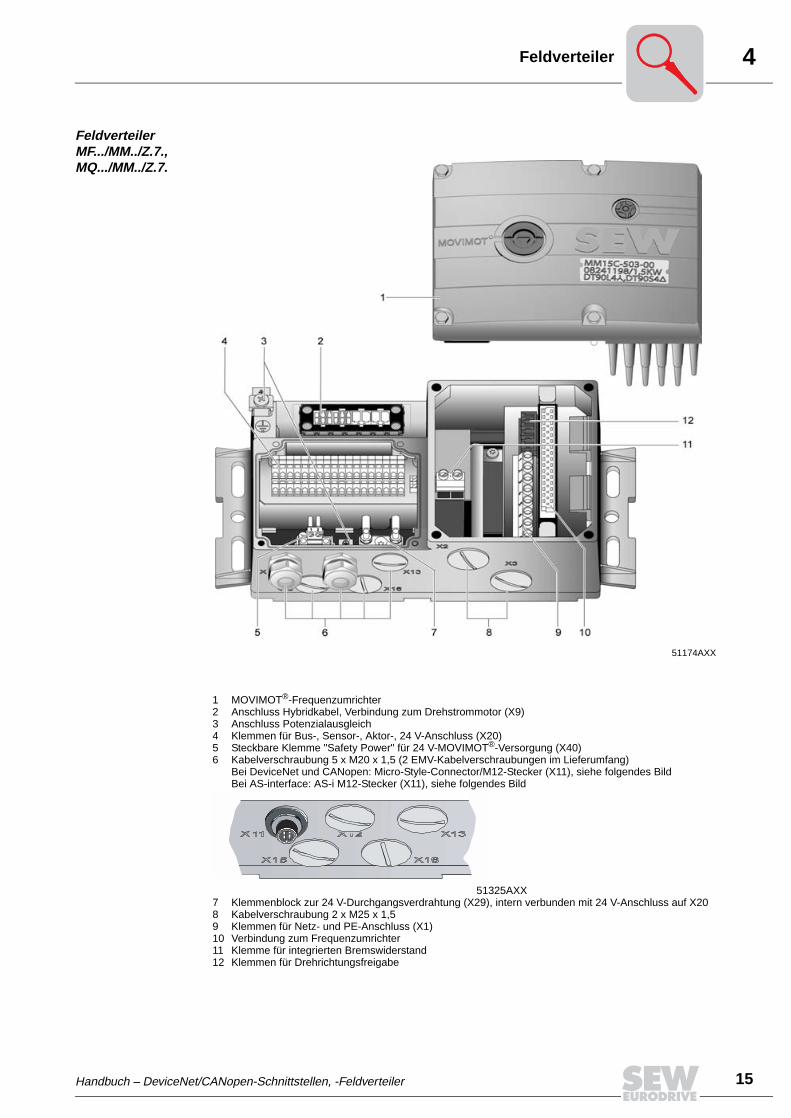
Feldverteiler MF.../MM../Z.7., MQ.../MM../Z.7.
51174AXX
1 MOVIMOT®-Frequenzumrichter2 Anschluss Hybridkabel, Verbindung zum Drehstrommotor (X9)3 Anschluss Potenzialausgleich4 Klemmen für Bus-, Sensor-, Aktor-, 24 V-Anschluss (X20)5 Steckbare Klemme "Safety Power" für 24 V-MOVIMOT®-Versorgung (X40)6 Kabelverschraubung 5 x M20 x 1,5 (2 EMV-Kabelverschraubungen im Lieferumfang)
Bei DeviceNet und CANopen: Micro-Style-Connector/M12-Stecker (X11), siehe folgendes BildBei AS-interface: AS-i M12-Stecker (X11), siehe folgendes Bild
51325AXX7 Klemmenblock zur 24 V-Durchgangsverdrahtung (X29), intern verbunden mit 24 V-Anschluss auf X208 Kabelverschraubung 2 x M25 x 1,59 Klemmen für Netz- und PE-Anschluss (X1)10 Verbindung zum Frequenzumrichter11 Klemme für integrierten Bremswiderstand12 Klemmen für Drehrichtungsfreigabe
4
16 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler
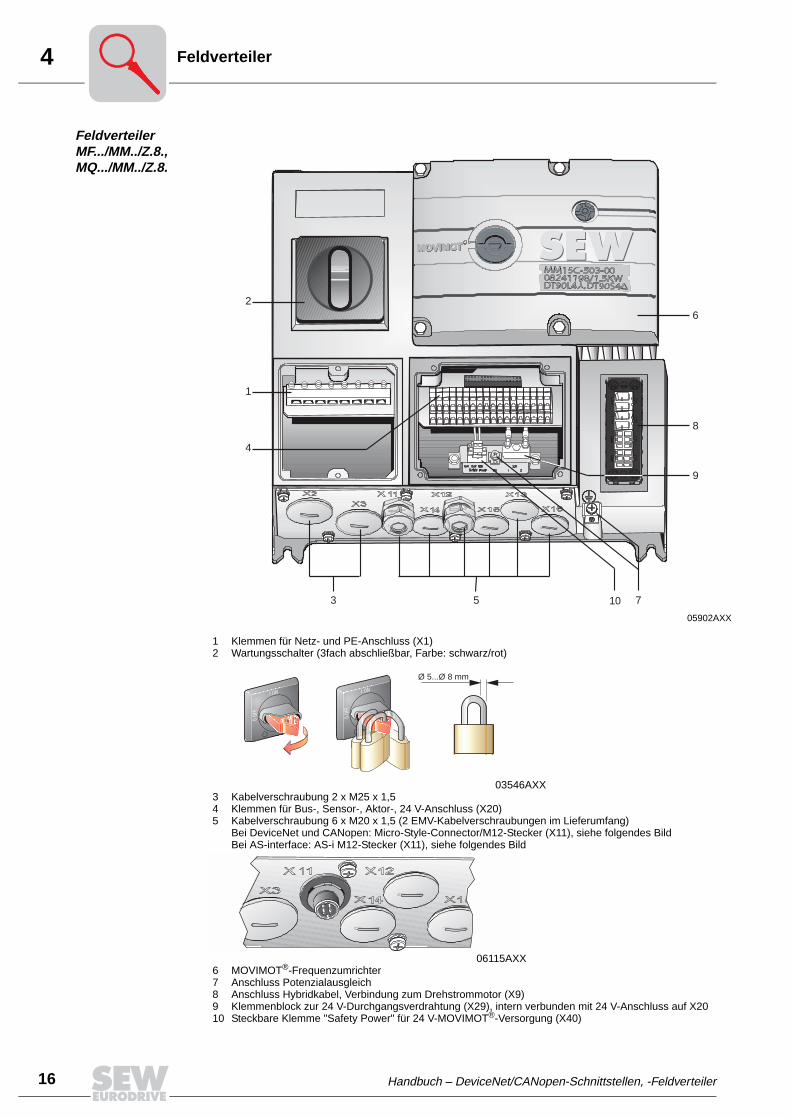
Feldverteiler MF.../MM../Z.8., MQ.../MM../Z.8.
05902AXX
1 Klemmen für Netz- und PE-Anschluss (X1)2 Wartungsschalter (3fach abschließbar, Farbe: schwarz/rot)
03546AXX3 Kabelverschraubung 2 x M25 x 1,54 Klemmen für Bus-, Sensor-, Aktor-, 24 V-Anschluss (X20)5 Kabelverschraubung 6 x M20 x 1,5 (2 EMV-Kabelverschraubungen im Lieferumfang)
Bei DeviceNet und CANopen: Micro-Style-Connector/M12-Stecker (X11), siehe folgendes BildBei AS-interface: AS-i M12-Stecker (X11), siehe folgendes Bild
06115AXX6 MOVIMOT®-Frequenzumrichter7 Anschluss Potenzialausgleich8 Anschluss Hybridkabel, Verbindung zum Drehstrommotor (X9)9 Klemmenblock zur 24 V-Durchgangsverdrahtung (X29), intern verbunden mit 24 V-Anschluss auf X2010 Steckbare Klemme "Safety Power" für 24 V-MOVIMOT®-Versorgung (X40)
3 5 7
8
62
1
4
10
9
I ON I ON
0 OF
F
0 OF
F
Ø 5...Ø 8 mm
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 17
4Typenbezeichnungen DeviceNet-Feldverteiler
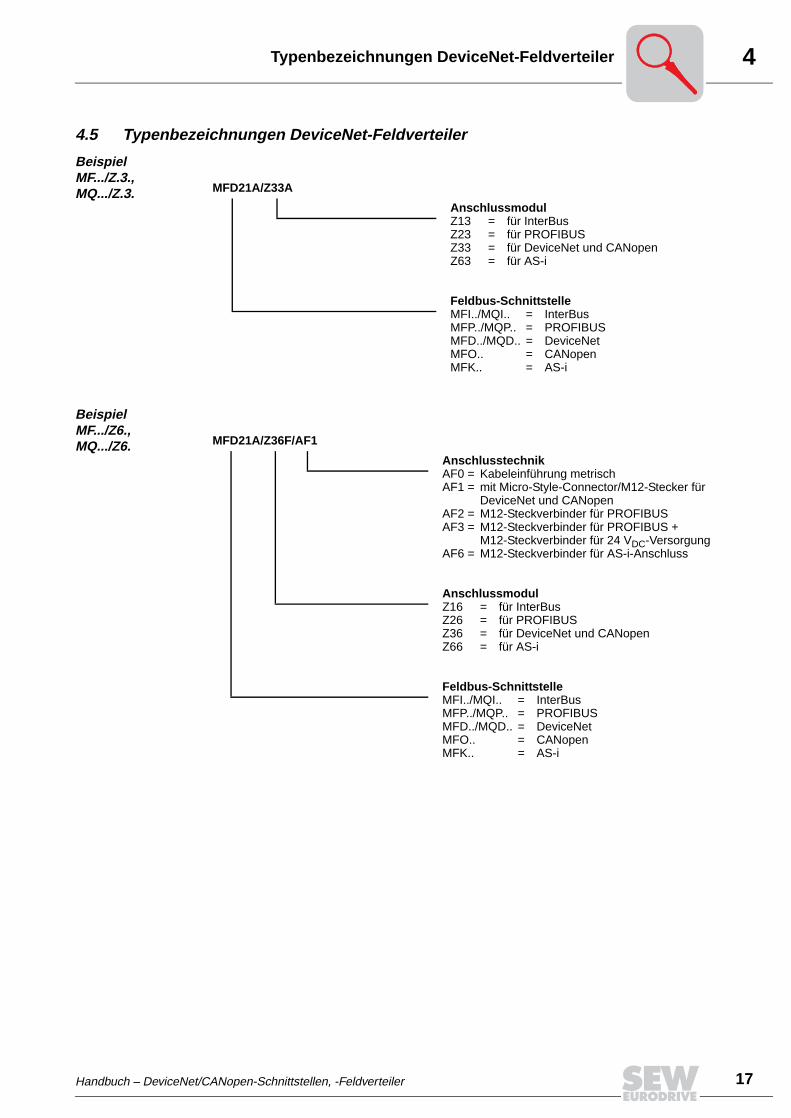
4.5 Typenbezeichnungen DeviceNet-Feldverteiler
Beispiel MF.../Z.3., MQ.../Z.3.
Beispiel MF.../Z6., MQ.../Z6.
MFD21A/Z33A
AnschlussmodulZ13 = für InterBusZ23 = für PROFIBUSZ33 = für DeviceNet und CANopenZ63 = für AS-i
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
MFD21A/Z36F/AF1
AnschlusstechnikAF0 = Kabeleinführung metrischAF1 = mit Micro-Style-Connector/M12-Stecker für
DeviceNet und CANopenAF2 = M12-Steckverbinder für PROFIBUSAF3 = M12-Steckverbinder für PROFIBUS +
M12-Steckverbinder für 24 VDC-VersorgungAF6 = M12-Steckverbinder für AS-i-Anschluss
AnschlussmodulZ16 = für InterBusZ26 = für PROFIBUSZ36 = für DeviceNet und CANopenZ66 = für AS-i
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
4
18 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
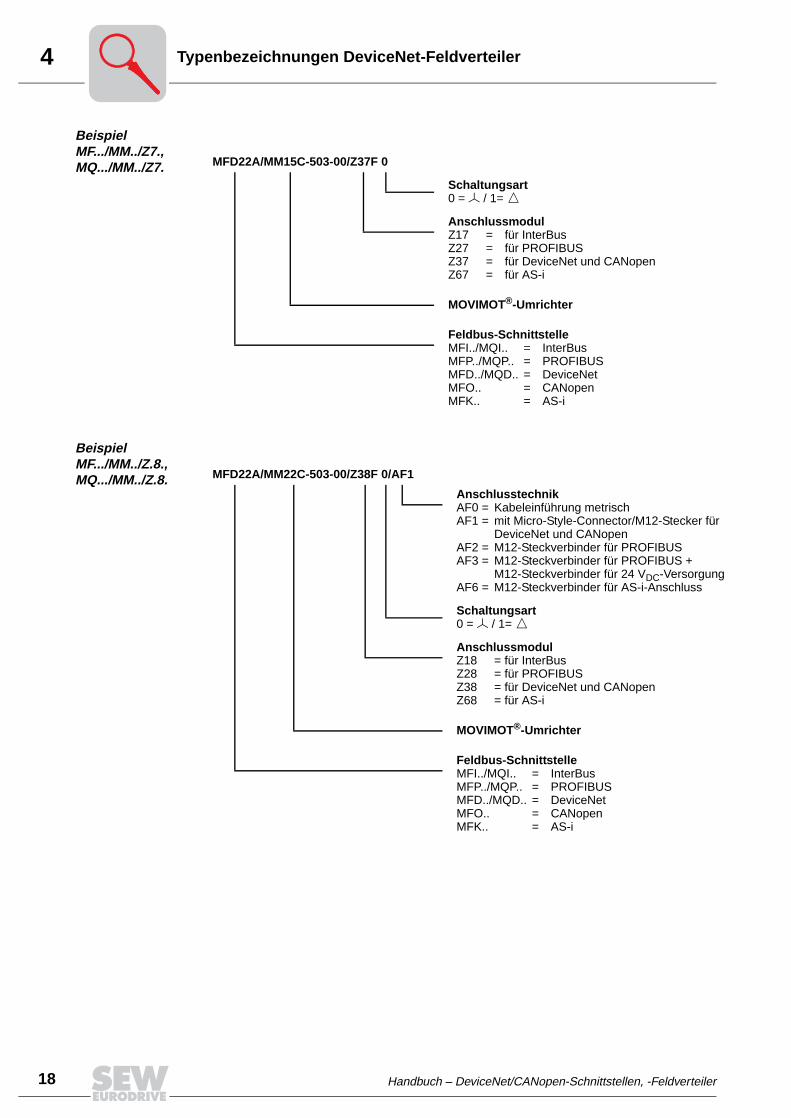
Typenbezeichnungen DeviceNet-Feldverteiler
Beispiel MF.../MM../Z7., MQ.../MM../Z7.
Beispiel MF.../MM../Z.8., MQ.../MM../Z.8.
MFD22A/MM15C-503-00/Z37F 0
Schaltungsart0 = / 1=
AnschlussmodulZ17 = für InterBusZ27 = für PROFIBUSZ37 = für DeviceNet und CANopenZ67 = für AS-i
MOVIMOT®-Umrichter
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
MFD22A/MM22C-503-00/Z38F 0/AF1
AnschlusstechnikAF0 = Kabeleinführung metrischAF1 = mit Micro-Style-Connector/M12-Stecker für
DeviceNet und CANopenAF2 = M12-Steckverbinder für PROFIBUSAF3 = M12-Steckverbinder für PROFIBUS +
M12-Steckverbinder für 24 VDC-VersorgungAF6 = M12-Steckverbinder für AS-i-Anschluss
Schaltungsart0 = / 1=
AnschlussmodulZ18 = für InterBusZ28 = für PROFIBUSZ38 = für DeviceNet und CANopenZ68 = für AS-i
MOVIMOT®-Umrichter
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 19
4Typenbezeichnungen CANopen-Feldverteiler
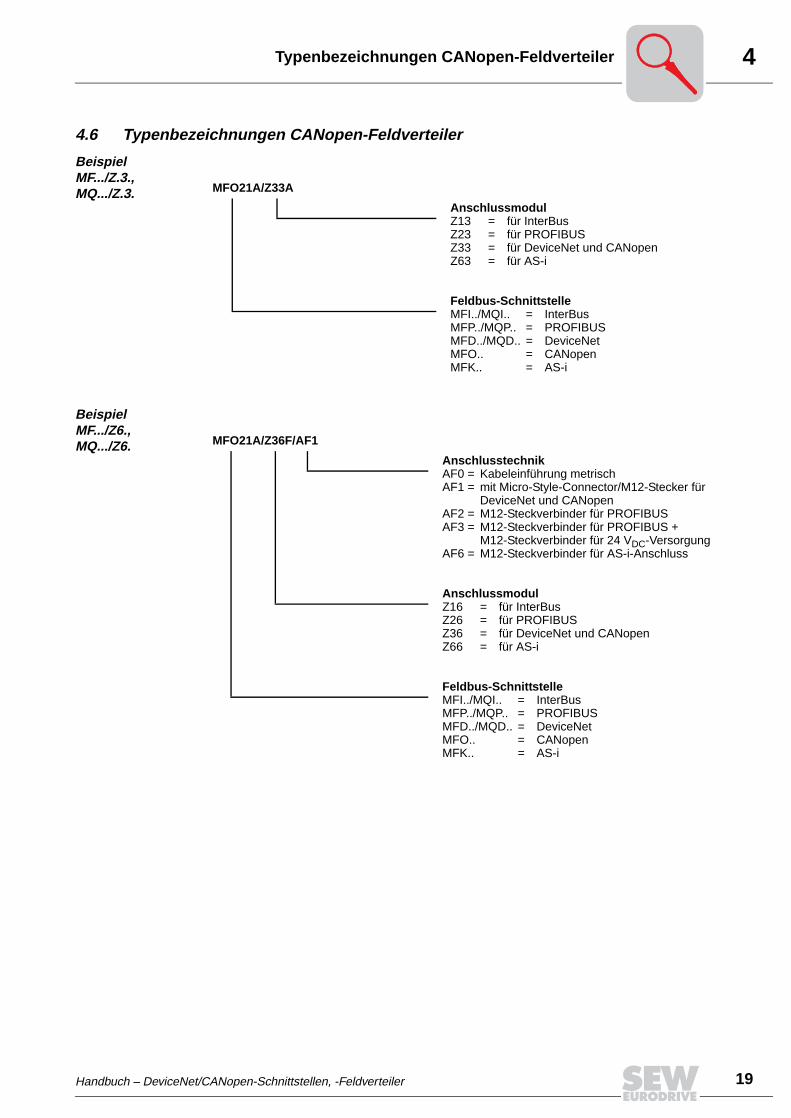
4.6 Typenbezeichnungen CANopen-Feldverteiler
Beispiel MF.../Z.3., MQ.../Z.3.
Beispiel MF.../Z6., MQ.../Z6.
MFO21A/Z33A
AnschlussmodulZ13 = für InterBusZ23 = für PROFIBUSZ33 = für DeviceNet und CANopenZ63 = für AS-i
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
MFO21A/Z36F/AF1
AnschlusstechnikAF0 = Kabeleinführung metrischAF1 = mit Micro-Style-Connector/M12-Stecker für
DeviceNet und CANopenAF2 = M12-Steckverbinder für PROFIBUSAF3 = M12-Steckverbinder für PROFIBUS +
M12-Steckverbinder für 24 VDC-VersorgungAF6 = M12-Steckverbinder für AS-i-Anschluss
AnschlussmodulZ16 = für InterBusZ26 = für PROFIBUSZ36 = für DeviceNet und CANopenZ66 = für AS-i
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
4
20 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
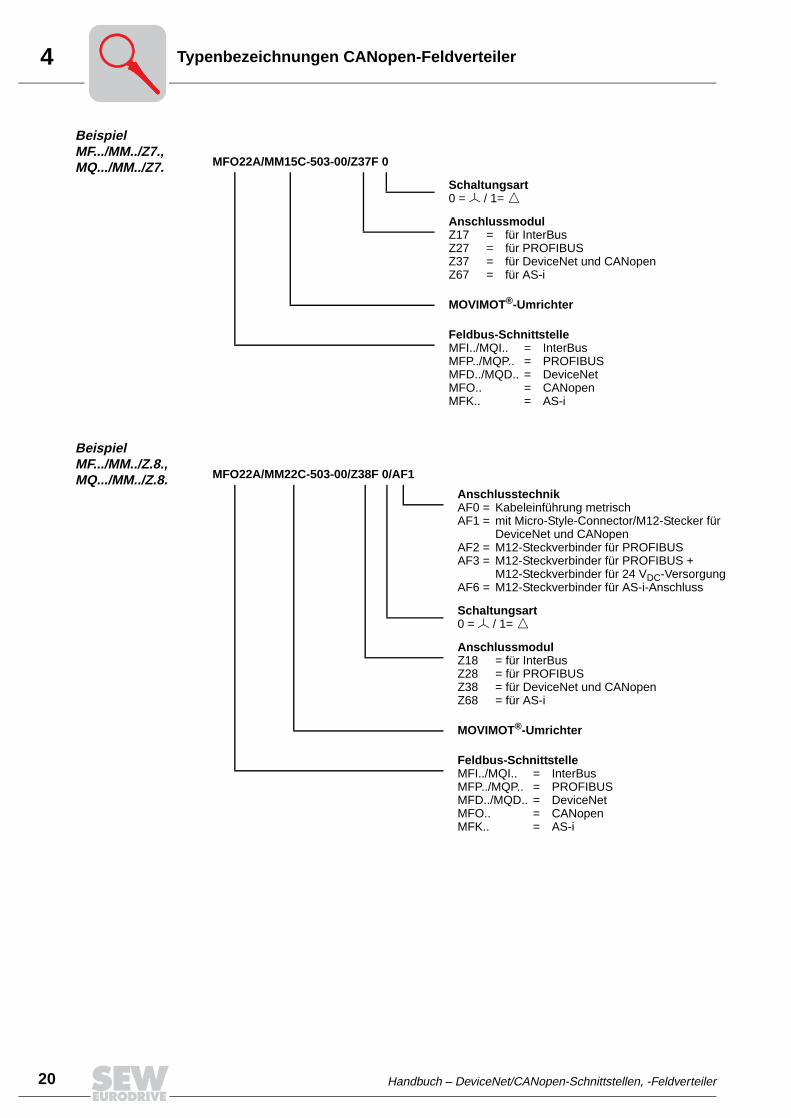
Typenbezeichnungen CANopen-Feldverteiler
Beispiel MF.../MM../Z7., MQ.../MM../Z7.
Beispiel MF.../MM../Z.8., MQ.../MM../Z.8.
MFO22A/MM15C-503-00/Z37F 0
Schaltungsart0 = / 1=
AnschlussmodulZ17 = für InterBusZ27 = für PROFIBUSZ37 = für DeviceNet und CANopenZ67 = für AS-i
MOVIMOT®-Umrichter
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
MFO22A/MM22C-503-00/Z38F 0/AF1
AnschlusstechnikAF0 = Kabeleinführung metrischAF1 = mit Micro-Style-Connector/M12-Stecker für
DeviceNet und CANopenAF2 = M12-Steckverbinder für PROFIBUSAF3 = M12-Steckverbinder für PROFIBUS +
M12-Steckverbinder für 24 VDC-VersorgungAF6 = M12-Steckverbinder für AS-i-Anschluss
Schaltungsart0 = / 1=
AnschlussmodulZ18 = für InterBusZ28 = für PROFIBUSZ38 = für DeviceNet und CANopenZ68 = für AS-i
MOVIMOT®-Umrichter
Feldbus-SchnittstelleMFI../MQI.. = InterBusMFP../MQP.. = PROFIBUSMFD../MQD.. = DeviceNetMFO.. = CANopenMFK.. = AS-i
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 21
4MOVIMOT®-Frequenzumrichter (integriert in Feldverteiler Z.7/Z.8)
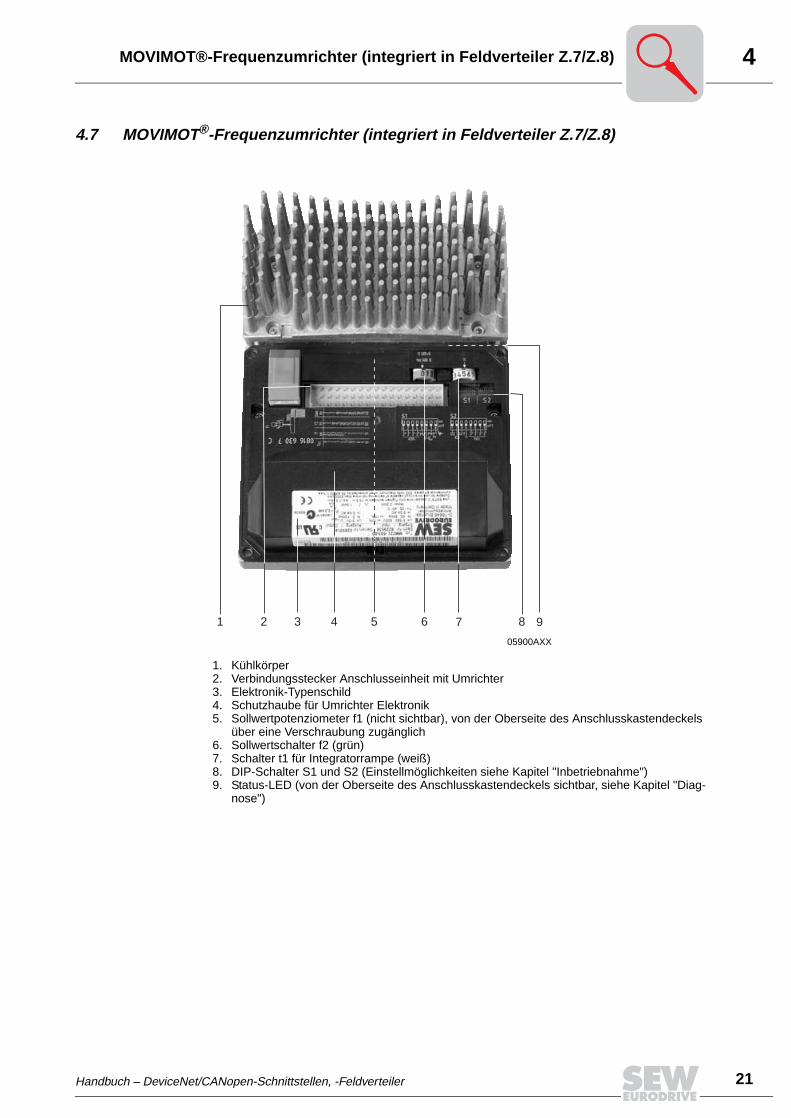
4.7 MOVIMOT®-Frequenzumrichter (integriert in Feldverteiler Z.7/Z.8)
05900AXX
1. Kühlkörper2. Verbindungsstecker Anschlusseinheit mit Umrichter3. Elektronik-Typenschild4. Schutzhaube für Umrichter Elektronik5. Sollwertpotenziometer f1 (nicht sichtbar), von der Oberseite des Anschlusskastendeckels
über eine Verschraubung zugänglich6. Sollwertschalter f2 (grün)7. Schalter t1 für Integratorrampe (weiß)8. DIP-Schalter S1 und S2 (Einstellmöglichkeiten siehe Kapitel "Inbetriebnahme")9. Status-LED (von der Oberseite des Anschlusskastendeckels sichtbar, siehe Kapitel "Diag-
nose")
3 4 5 6 7 8 91 2
5
22 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Installationsvorschriften
5 Mechanische Installation5.1 Installationsvorschriften
Montage • Feldbus-Schnittstellen / Feldverteiler dürfen nur auf einer ebenen, erschütterungs-freien und verwindungssteifen Unterkonstruktion montiert werden
• Zur Befestigung des Feldverteilers MFZ.3 Schrauben der Größe M5 mit passendenUnterlegscheiben verwenden. Schrauben mit Drehmomentschlüssel anziehen (zu-lässiges Anzugsdrehmoment 2,8 bis 3,1 Nm)
• Zur Befestigung des Feldverteilers MFZ.6, MFZ.7 oder MFZ.8 Schrauben der GrößeM6 mit passenden Unterlegscheiben verwenden. Schrauben mit Drehmoment-schlüssel anziehen (zulässiges Anzugsdrehmoment 3,1 bis 3,5 Nm)
Aufstellen in Feuchträumen oder im Freien
• Passende Verschraubungen für die Kabel verwenden (ggf. Reduzierstücke benut-zen)
• Nicht benutzte Kabeleinführungen und M12-Anschlussbuchsen mit Verschluss-Schrauben abdichten
• Bei seitlicher Kabeleinführung das Kabel mit einer Abtropfschlaufe verlegen
• Vor Wiedermontage von Busmodul / Anschlusskastendeckel, Dichtflächen prüfenund ggf. reinigen
Bei Auslieferung von Feldverteilern ist der Steckverbinder des Motorabgangs(Hybridkabel) mit einem Transportschutz versehen.
Dieser gewährleistet nur Schutzart IP40. Zur Erreichung der spezifizierten Schutz-art muss der Transportschutz entfernt und der passende Gegenstecker aufge-steckt und verschraubt werden.
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 23
5Feldbus-Schnittstellen MF../MQ..
5.2 Feldbus-Schnittstellen MF../MQ..
Feldbus-Schnittstellen MF../MQ.. können wie folgt montiert werden:
• Montage am MOVIMOT®-Anschlusskasten
• Montage im Feld
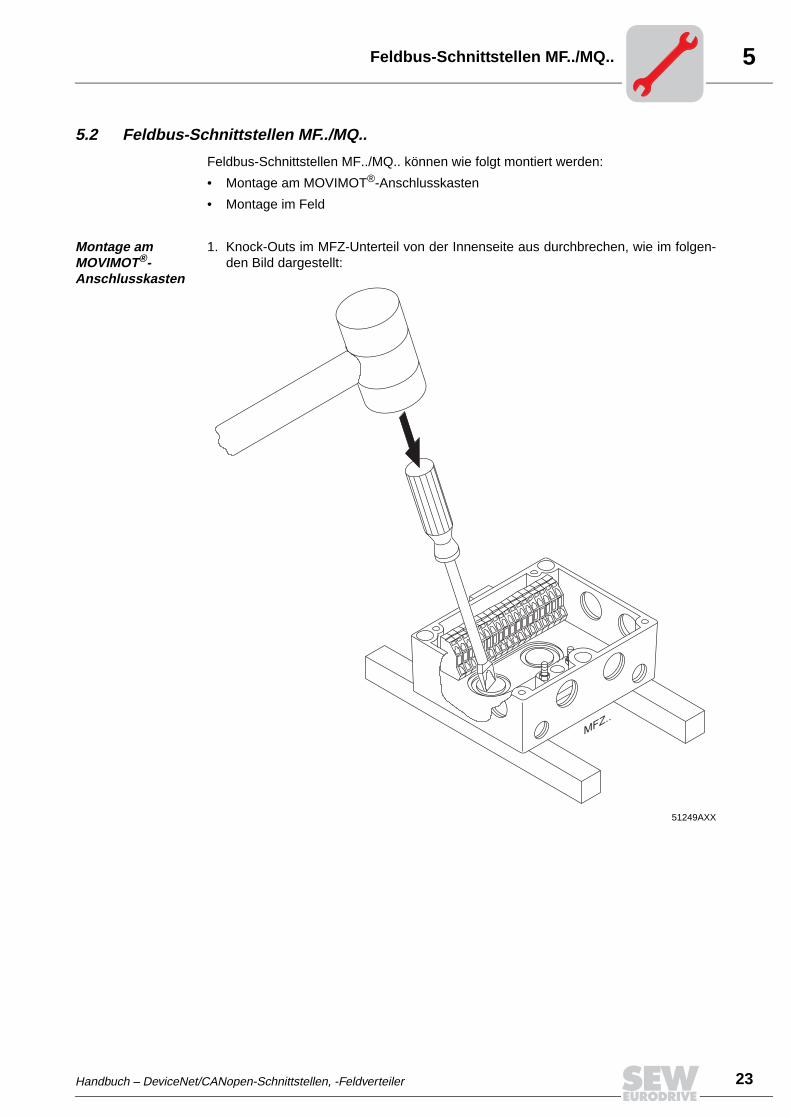
Montage am MOVIMOT®-Anschlusskasten
1. Knock-Outs im MFZ-Unterteil von der Innenseite aus durchbrechen, wie im folgen-den Bild dargestellt:
51249AXX
MFZ..
5
24 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldbus-Schnittstellen MF../MQ..
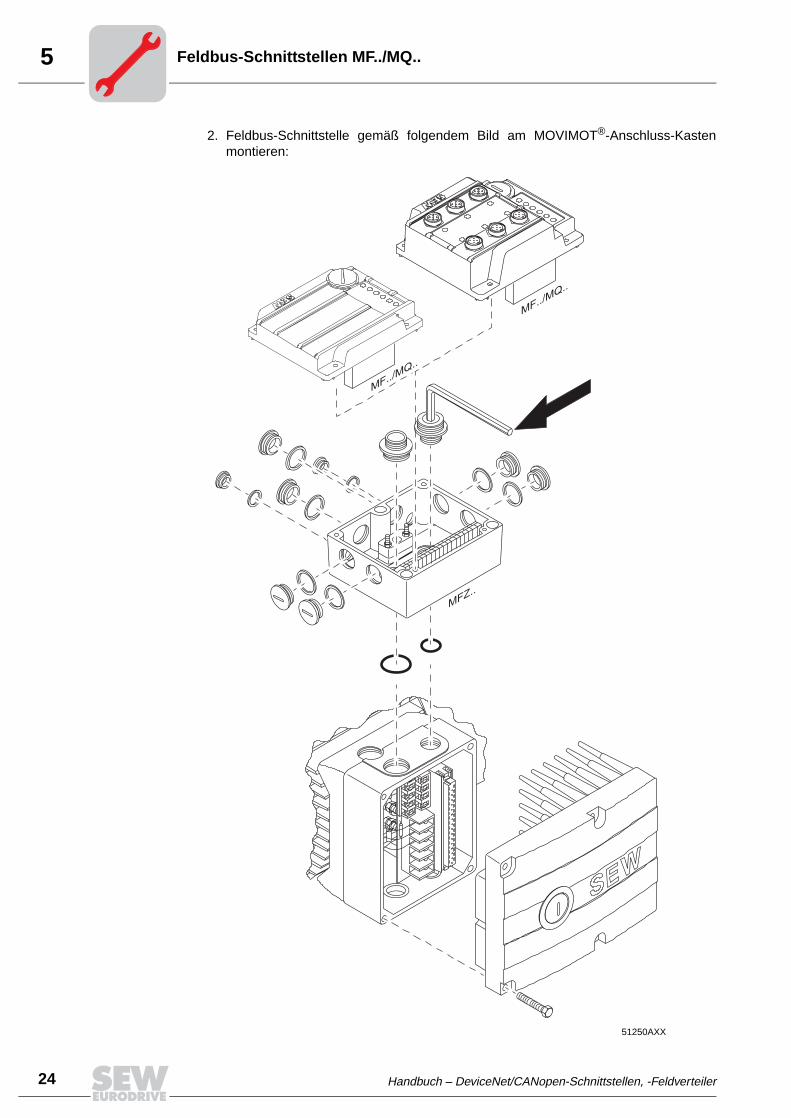
2. Feldbus-Schnittstelle gemäß folgendem Bild am MOVIMOT®-Anschluss-Kastenmontieren:
51250AXX
MF../
MQ..
MF../
MQ..
MFZ..
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 25
5Feldbus-Schnittstellen MF../MQ..
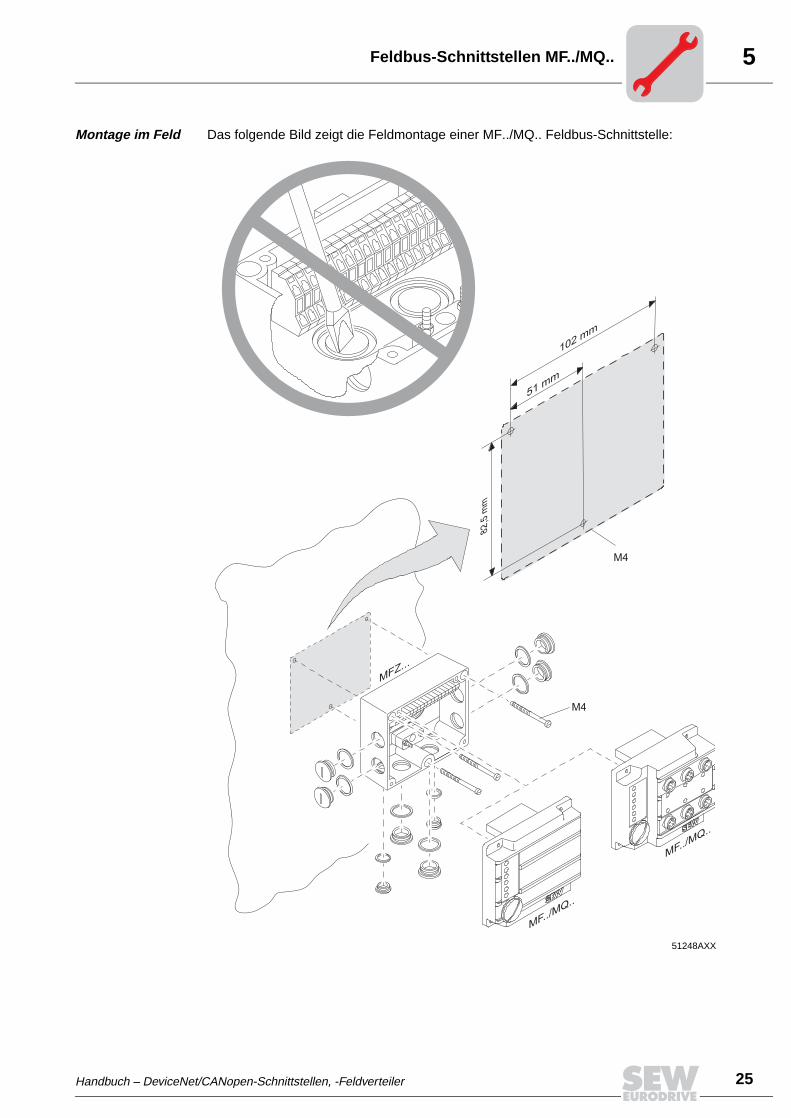
Montage im Feld Das folgende Bild zeigt die Feldmontage einer MF../MQ.. Feldbus-Schnittstelle:
51248AXX
82,5
mm
102 mm
51 mm
M4
M4
MFZ...
MF../
MQ..
MF../
MQ..
5
26 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler
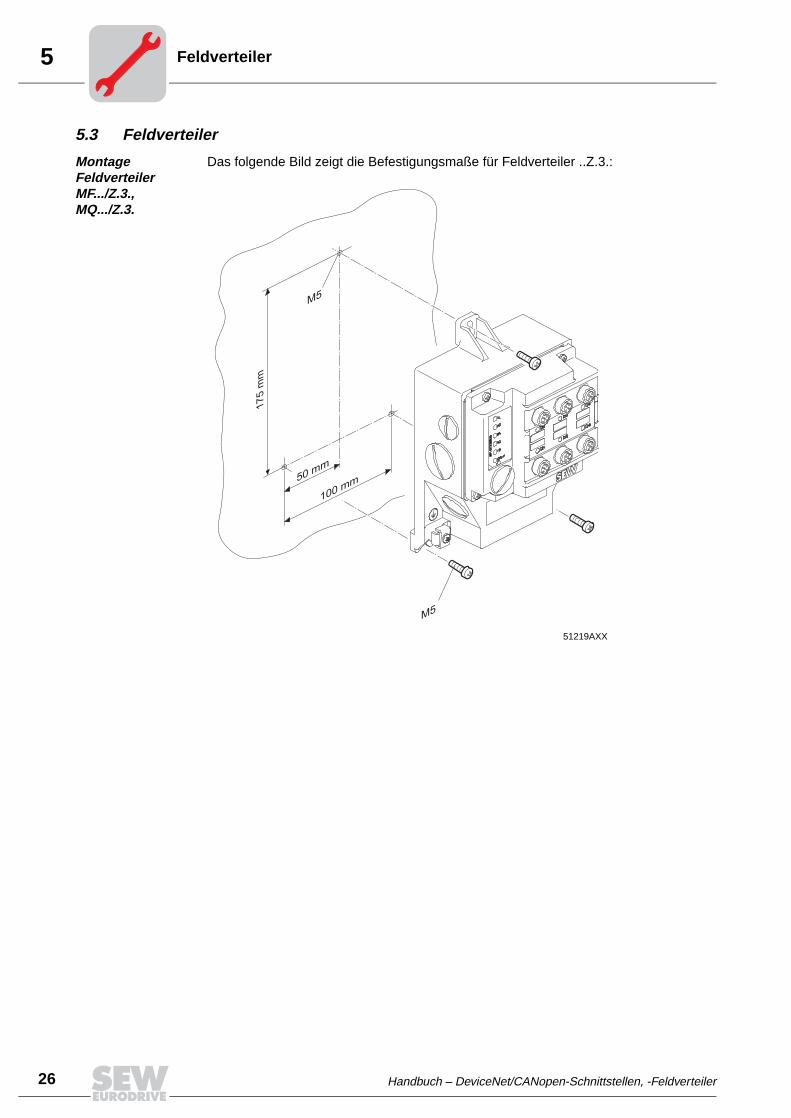
5.3 Feldverteiler
Montage Feldverteiler MF.../Z.3., MQ.../Z.3.
Das folgende Bild zeigt die Befestigungsmaße für Feldverteiler ..Z.3.:
51219AXX
50 mm
100 mm
M5
M5
17
5 m
m

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 27
5Feldverteiler
Montage Feldverteiler MF.../Z.6., MQ.../Z.6.
Das folgende Bild zeigt die Befestigungsmaße für Feldverteiler ..Z.6.:
51239AXX
M6
M6
365 mm
180 m
m
5
28 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler
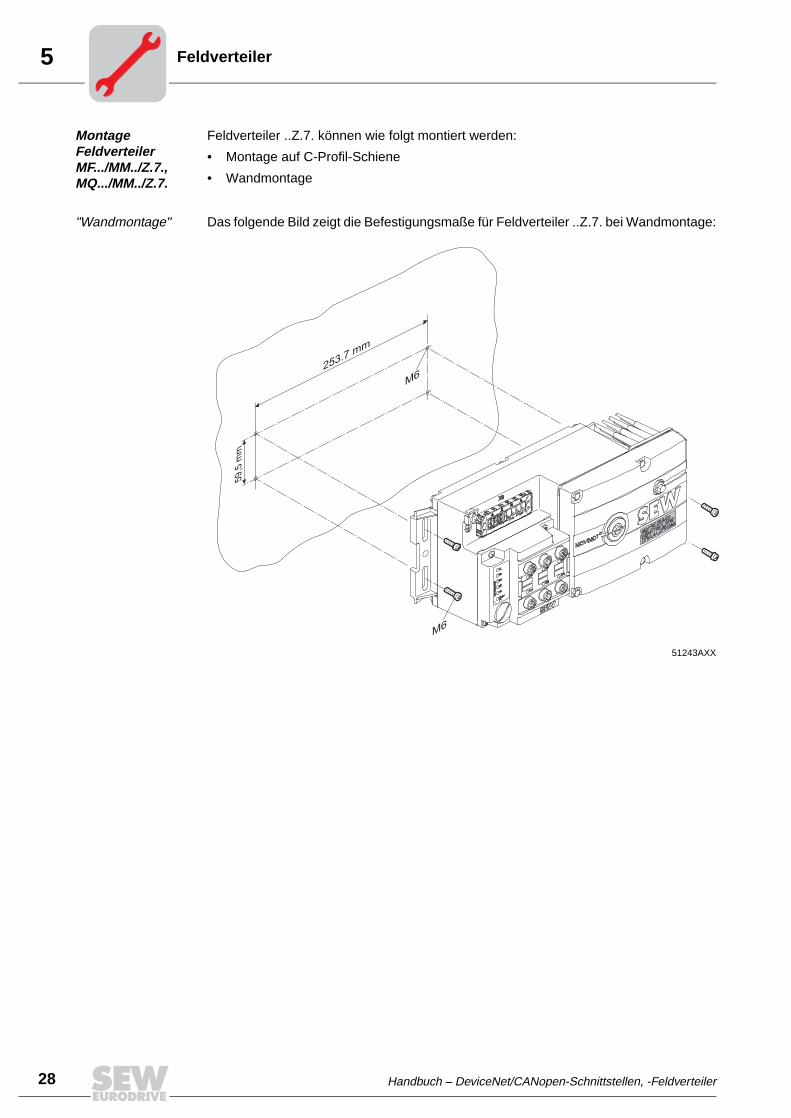
Montage Feldverteiler MF.../MM../Z.7., MQ.../MM../Z.7.
Feldverteiler ..Z.7. können wie folgt montiert werden:
• Montage auf C-Profil-Schiene
• Wandmontage
"Wandmontage" Das folgende Bild zeigt die Befestigungsmaße für Feldverteiler ..Z.7. bei Wandmontage:
51243AXX
59,5
mm
253.7 mm
M6
M6
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 29
5Feldverteiler
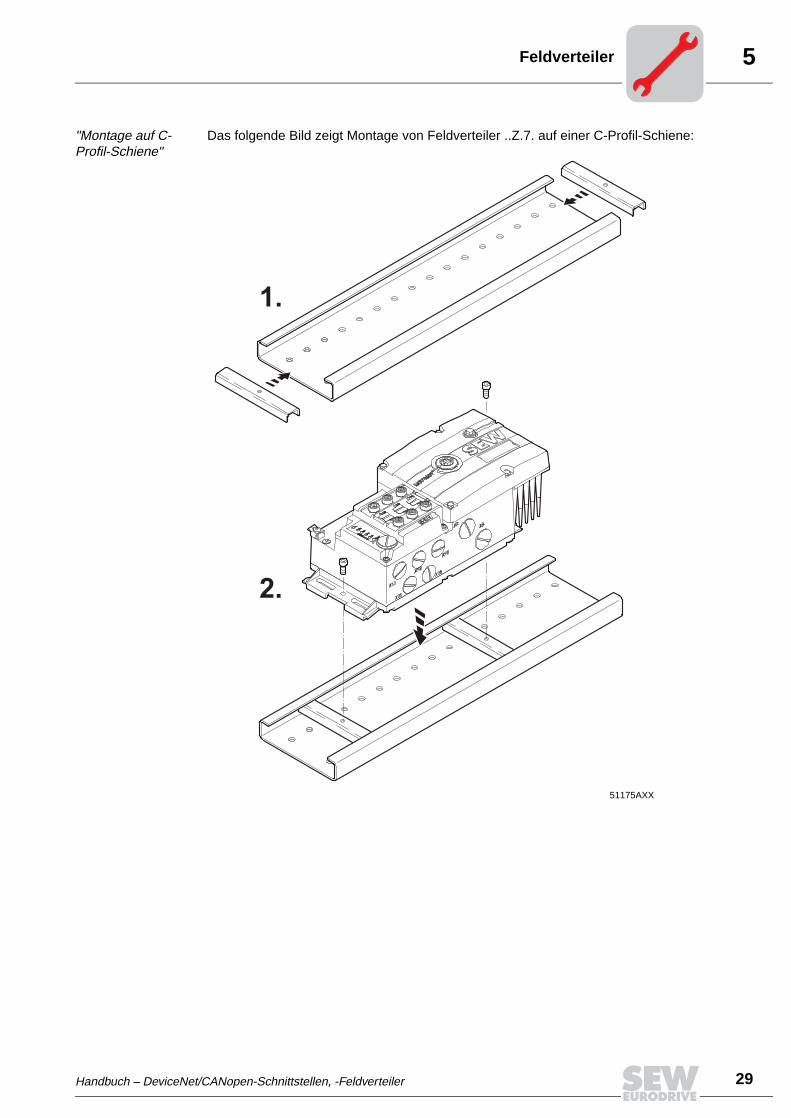
"Montage auf C-Profil-Schiene"
Das folgende Bild zeigt Montage von Feldverteiler ..Z.7. auf einer C-Profil-Schiene:
51175AXX
1.
2.
5
30 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler
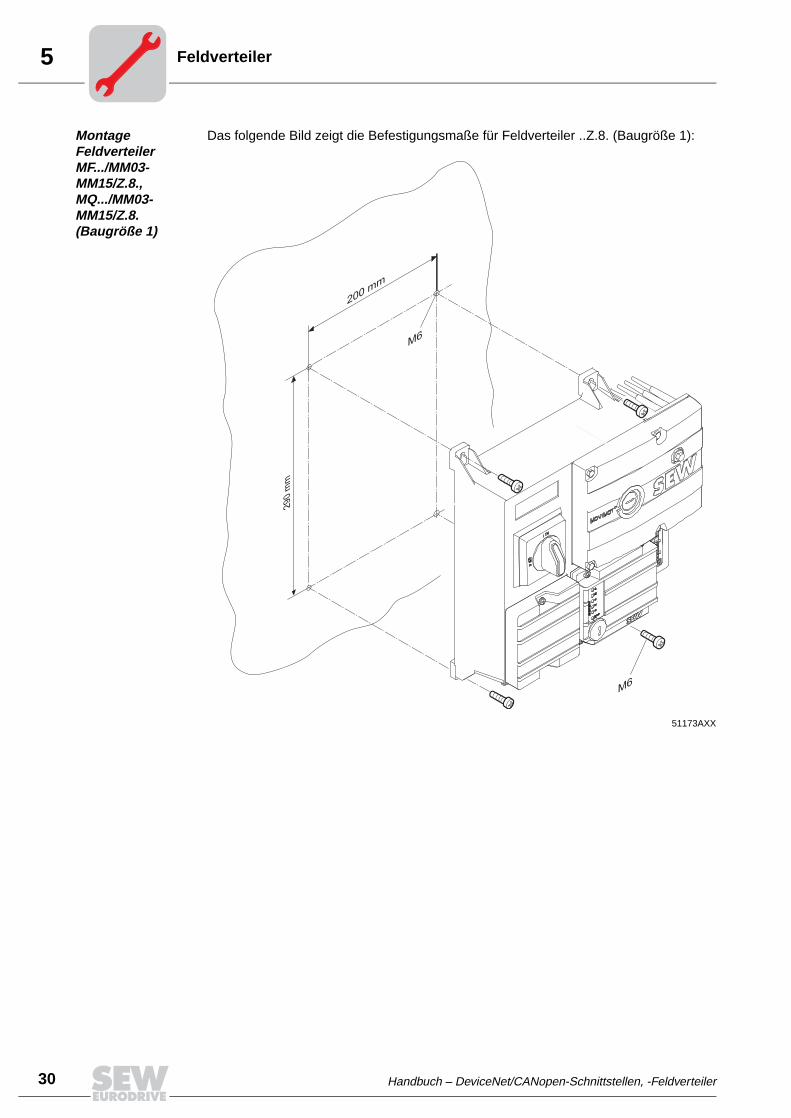
Montage Feldverteiler MF.../MM03-MM15/Z.8., MQ.../MM03-MM15/Z.8. (Baugröße 1)
Das folgende Bild zeigt die Befestigungsmaße für Feldverteiler ..Z.8. (Baugröße 1):
51173AXX
290 m
m
200 mm
M6
M6
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 31
5Feldverteiler
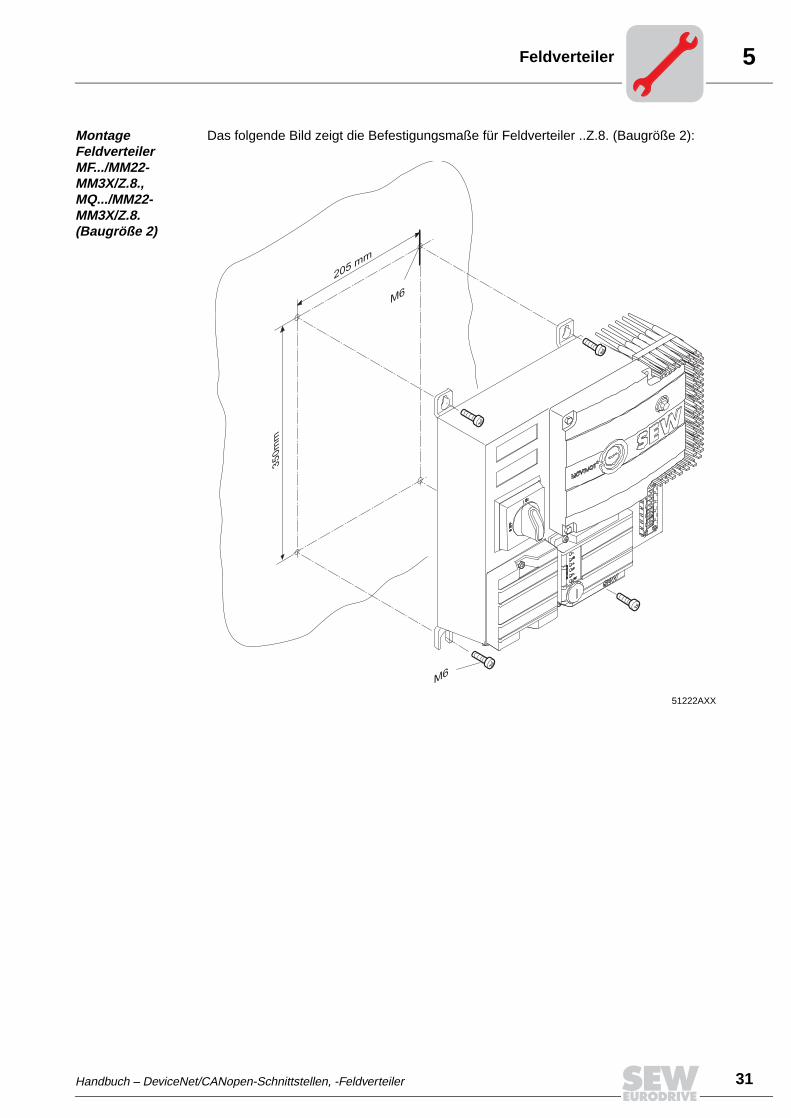
Montage Feldverteiler MF.../MM22-MM3X/Z.8., MQ.../MM22-MM3X/Z.8. (Baugröße 2)
Das folgende Bild zeigt die Befestigungsmaße für Feldverteiler ..Z.8. (Baugröße 2):
51222AXX
35
0m
m
205 mm
M6
M6
6
32 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Installationsplanung unter EMV-Gesichtspunkten
6 Elektrische Installation6.1 Installationsplanung unter EMV-Gesichtspunkten
Hinweise zur Anordnung und Verlegung von Installationskom-ponenten
Die richtige Wahl der Leitungen, korrekte Erdung und funktionierender Potenzialaus-gleich sind entscheidend für die erfolgreiche Installation von dezentralen Antrieben.
Grundsätzlich sind die einschlägigen Normen anzuwenden. Zusätzlich dazu sind fol-gende Punkte besonders zu beachten:
• Potenzialausgleich
– unabhängig von der Funktionserde (Schutzleiteranschluss) muss für niederohmi-gen, HF-tauglichen Potenzialausgleich gesorgt werden (siehe auch VDE 0113oder VDE 0100 Teil 540), z.B. durch– flächige Verbindung metallischer (Anlagen-) Teile– Einsatz von Flachbanderdern (HF-Litze)
– Der Leitungsschirm von Datenleitungen darf nicht für den Potenzialausgleich ver-wendet werden
• Datenleitungen und 24 V-Versorgung
– sind getrennt von störbehafteten Leitungen (z.B. Ansteuerleitungen von Magnet-ventilen, Motorleitungen) zu verlegen
• Feldverteiler
– für die Verbindung zwischen Feldverteiler und Motor wird empfohlen, die spezielldafür ausgelegten konfektionierten SEW-Hybridkabel zu verwenden
• Kabelverschraubungen
– es muss eine Verschraubung mit großflächiger Schirmkontaktierung gewähltwerden (Hinweise zur Auswahl und ordnungsgemäßen Montage von Kabelver-schraubungen beachten)
• Leitungsschirm
– muss gute EMV-Eigenschaften aufweisen (hohe Schirmdämpfung)– darf nicht nur als mechanischer Schutz des Kabels vorgesehen sein– muss an den Leitungsenden flächig mit dem Metallgehäuse des Geräts (über
EMV-Metall-Kabelverschraubungen) verbunden werden (Hinweise zur Auswahlund ordnungsgemäßer Montage von Kabelverschraubungen beachten)
• Weitere Informationen finden Sie in der SEW-Druckschrift "Praxis der An-triebstechnik – EMV in der Antriebstechnik"
03643AXX
03047AXX
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 33
6Installationsplanung unter EMV-Gesichtspunkten
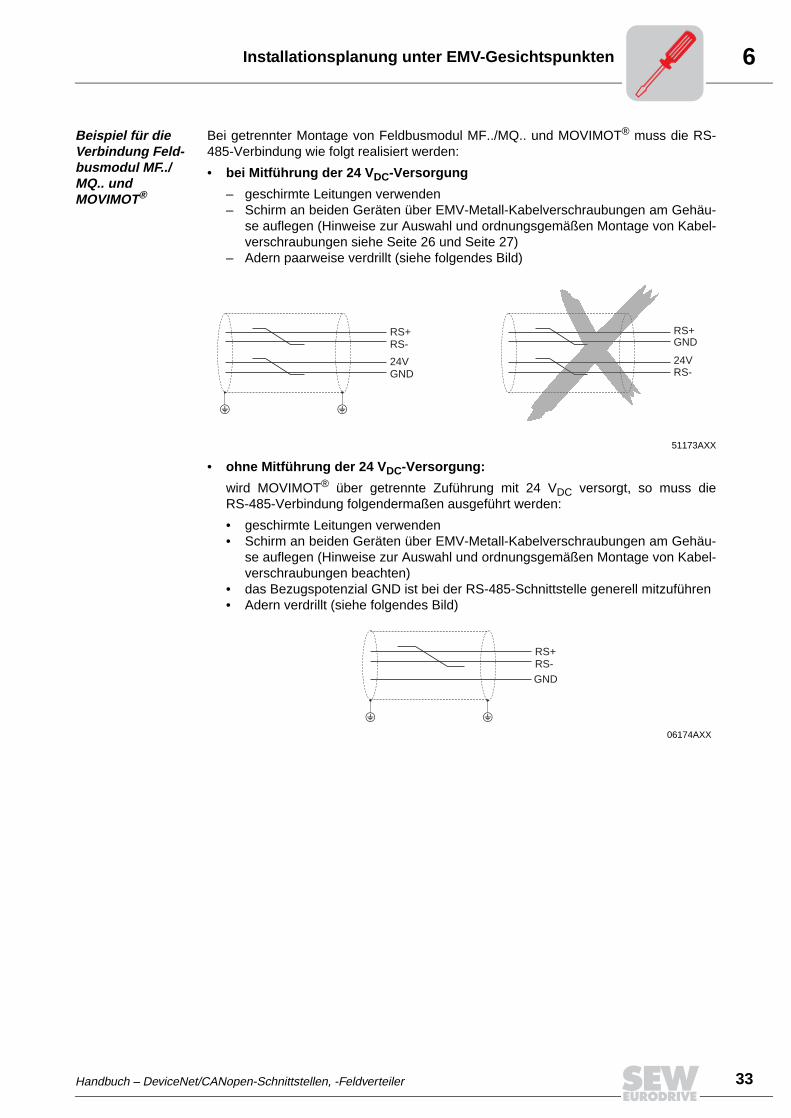
Beispiel für die Verbindung Feld-busmodul MF../MQ.. und MOVIMOT®
Bei getrennter Montage von Feldbusmodul MF../MQ.. und MOVIMOT® muss die RS-485-Verbindung wie folgt realisiert werden:
• bei Mitführung der 24 VDC-Versorgung
– geschirmte Leitungen verwenden– Schirm an beiden Geräten über EMV-Metall-Kabelverschraubungen am Gehäu-
se auflegen (Hinweise zur Auswahl und ordnungsgemäßen Montage von Kabel-verschraubungen siehe Seite 26 und Seite 27)
– Adern paarweise verdrillt (siehe folgendes Bild)
• ohne Mitführung der 24 VDC-Versorgung:
wird MOVIMOT® über getrennte Zuführung mit 24 VDC versorgt, so muss dieRS-485-Verbindung folgendermaßen ausgeführt werden:
• geschirmte Leitungen verwenden• Schirm an beiden Geräten über EMV-Metall-Kabelverschraubungen am Gehäu-
se auflegen (Hinweise zur Auswahl und ordnungsgemäßen Montage von Kabel-verschraubungen beachten)
• das Bezugspotenzial GND ist bei der RS-485-Schnittstelle generell mitzuführen• Adern verdrillt (siehe folgendes Bild)
51173AXX
06174AXX
RS+RS-
24VGND
RS+GND
24VRS-
RS+RS-GND
6
34 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
6.2 Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
Netzzuleitungen anschließen
• Bemessungsspannung und -frequenz des MOVIMOT®-Umrichters müssen mit denDaten des speisenden Netzes übereinstimmen.
• Leitungsquerschnitt: gemäß Eingangsstrom INetz bei Bemessungsleistung (sieheTechnische Daten).
• Leitungsabsicherung am Anfang der Netzzuleitung hinter dem Sammelschienen-Ab-zweig installieren. Sicherungen Typ D, D0, NH oder Leitungsschutzschalter verwen-den. Dimensionierung der Sicherung entsprechend dem Leitungsquerschnitt.
• Ein konventioneller Fehlerstromschutzschalter als Schutzeinrichtung ist nicht zuläs-sig. Allstromsensitive Fehlerstromschutzschalter ("Typ B") sind als Schutzeinrich-tung zulässig. Im normalen Betrieb von MOVIMOT®-Antrieben können Ableitströme> 3,5 mA auftreten.
• Es ist gemäß EN 50178 eine zweite PE-Verbindung (mind. im Querschnitt der Netz-zuleitung) parallel zum Schutzleiter über getrennte Anschlussstellen erforderlich. Eskönnen betriebsmäßige Ableitströme > 3,5 mA auftreten.
• Zum Schalten von MOVIMOT®-Antrieben müssen Schütz-Schaltkontakte der Ge-brauchskategorie AC-3 nach IEC 158 verwendet werden.
• SEW empfiehlt, in Spannungsnetzen mit nicht geerdetem Sternpunkt (IT-Netze) Iso-lationswächter mit Pulscode-Messverfahren zu verwenden. Dadurch werden Fehl-auslösungen des Isolationswächters durch die Erdkapazitäten des Umrichters ver-mieden.
Zulässiger Anschlussquer-schnitt und Strombelastbar-keit der Klemmen
Das zulässige Anzugsdrehmoment der Leistungsklemmen beträgt 0,6 Nm (5.3 Ib.in).
Weiterschleifen der 24 VDC-Versorgungs-spannung bei Modulträger MFZ.1:
• Im Anschlussbereich der 24 VDC-Versorgung befinden sich 2 Stehbolzen M4 x 12.Die Bolzen können zum Weiterschleifen der 24 VDC-Versorgungsspannung genutztwerden.
• Die Strombelastbarkeit der Anschlussbolzen beträgt 16 A.
• Das zulässige Anzugsdrehmoment für die Sechskantmuttern der Anschlussbolzenbeträgt 1,2 Nm (10.6 Ib.in) ± 20 %.
Leistungsklemmen X1, X21(Schraubklemmen)
Steuerklemmen X20(Federzugklemmen)
Anschlussquerschnitt (mm2) 0,2 mm2 – 4 mm2 0,08mm2 – 2,5 mm2
Anschlussquerschnitt (AWG) AWG 24 – AWG 10 AWG 28 – AWG 12
Strombelastbarkeit 32 A maximaler Dauerstrom 12 A maximaler Dauerstrom
05236AXX
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 35
6Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
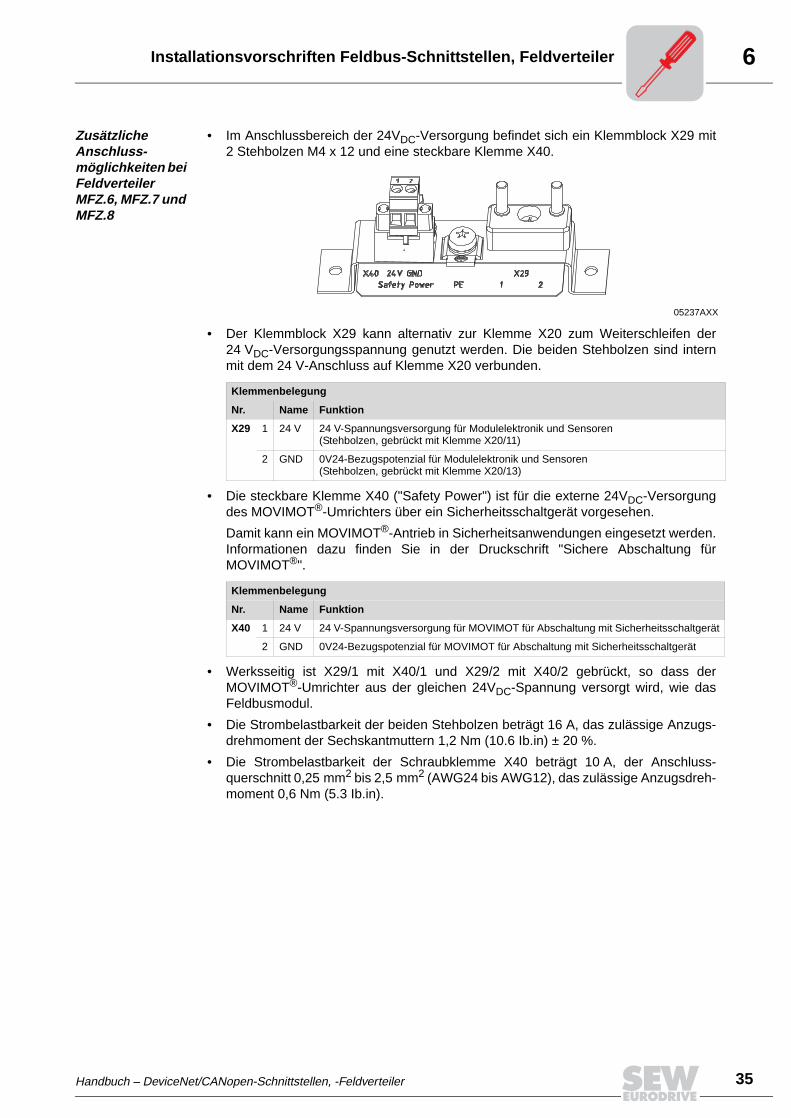
Zusätzliche Anschluss-möglichkeiten bei Feldverteiler MFZ.6, MFZ.7 und MFZ.8
• Im Anschlussbereich der 24VDC-Versorgung befindet sich ein Klemmblock X29 mit2 Stehbolzen M4 x 12 und eine steckbare Klemme X40.
• Der Klemmblock X29 kann alternativ zur Klemme X20 zum Weiterschleifen der24 VDC-Versorgungsspannung genutzt werden. Die beiden Stehbolzen sind internmit dem 24 V-Anschluss auf Klemme X20 verbunden.
• Die steckbare Klemme X40 ("Safety Power") ist für die externe 24VDC-Versorgungdes MOVIMOT®-Umrichters über ein Sicherheitsschaltgerät vorgesehen.
Damit kann ein MOVIMOT®-Antrieb in Sicherheitsanwendungen eingesetzt werden.Informationen dazu finden Sie in der Druckschrift "Sichere Abschaltung fürMOVIMOT®".
• Werksseitig ist X29/1 mit X40/1 und X29/2 mit X40/2 gebrückt, so dass derMOVIMOT®-Umrichter aus der gleichen 24VDC-Spannung versorgt wird, wie dasFeldbusmodul.
• Die Strombelastbarkeit der beiden Stehbolzen beträgt 16 A, das zulässige Anzugs-drehmoment der Sechskantmuttern 1,2 Nm (10.6 Ib.in) ± 20 %.
• Die Strombelastbarkeit der Schraubklemme X40 beträgt 10 A, der Anschluss-querschnitt 0,25 mm2 bis 2,5 mm2 (AWG24 bis AWG12), das zulässige Anzugsdreh-moment 0,6 Nm (5.3 Ib.in).
05237AXX
Klemmenbelegung
Nr. Name Funktion
X29 1 24 V 24 V-Spannungsversorgung für Modulelektronik und Sensoren(Stehbolzen, gebrückt mit Klemme X20/11)
2 GND 0V24-Bezugspotenzial für Modulelektronik und Sensoren(Stehbolzen, gebrückt mit Klemme X20/13)
Klemmenbelegung
Nr. Name Funktion
X40 1 24 V 24 V-Spannungsversorgung für MOVIMOT für Abschaltung mit Sicherheitsschaltgerät
2 GND 0V24-Bezugspotenzial für MOVIMOT für Abschaltung mit Sicherheitsschaltgerät
6
36 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
Aufstellhöhen über 1000 m NN
MOVIMOT®-Antriebe mit Netzspannungen 380 bis 500 V können unter folgendenRandbedingungen in Höhen ab 2000 m über NN bis maximal 4000 m über NN einge-setzt werden.
• Die Dauernennleistung reduziert sich aufgrund der verminderten Kühlung über1000 m (siehe MOVIMOT®-Betriebsanleitung).
• Die Luft- und Kriechstrecken sind ab 2000 m über NN nur für Überspannungsklasse2 ausreichend. Ist für die Installation Überspannungsklasse 3 gefordert, so mussdurch einen zusätzlichen externen Überspannungsschutz gewährleistet werden,dass Überspannungsspitzen auf 2,5 kV Phase-Phase und Phase-Erde begrenztwerden.
• Falls sichere elektrische Trennung gefordert wird, muss diese in Höhen ab 2000 müber NN außerhalb des Gerätes realisiert werden (Sichere elektrische Trennungnach EN 50178)
• Die zulässige Netznennspannung von 3 x 500 V bis 2000 m NN reduziert sich um6 V je 100 m auf maximal 3 x 380 V bei 4000 m NN.
Schutzeinrichtun-gen
• MOVIMOT®-Antriebe besitzen integrierte Schutzeinrichtungen gegen Überlastung,externe Einrichtungen werden nicht benötigt.
UL-gerechte Installation Feld-verteiler
• Als Anschlusskabel nur Kupferleitungen mit folgenden Temperaturbereichen ver-wenden: Temperaturbereich: 60 / 75 °C
• MOVIMOT®-Antriebe sind geeignet für den Betrieb an Spannungsnetzen mit geer-detem Sternpunkt (TN- und TT-Netze), die einen max. Netzstrom von 5000 AAC lie-fern können und eine max. Nennspannung von 500 VAC (MM03C-503 bis MM3XC-503) haben. Die Leistungsdaten der Sicherungen dürfen bei Betrieb mit Feldverteiler30A/600 V nicht überschreiten.
• Als externe 24 VDC-Spannungsquellen nur geprüfte Geräte mit begrenzter Aus-gangsspannung (Umax = 30 VDC) und begrenztem Ausgangsstrom (I = 8 A) verwen-den.
• Die UL-Zertifizierung gilt nur für Betrieb an Spannungsnetzen mit Spannungen ge-gen Erde bis max. 300 V.
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 37
6Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
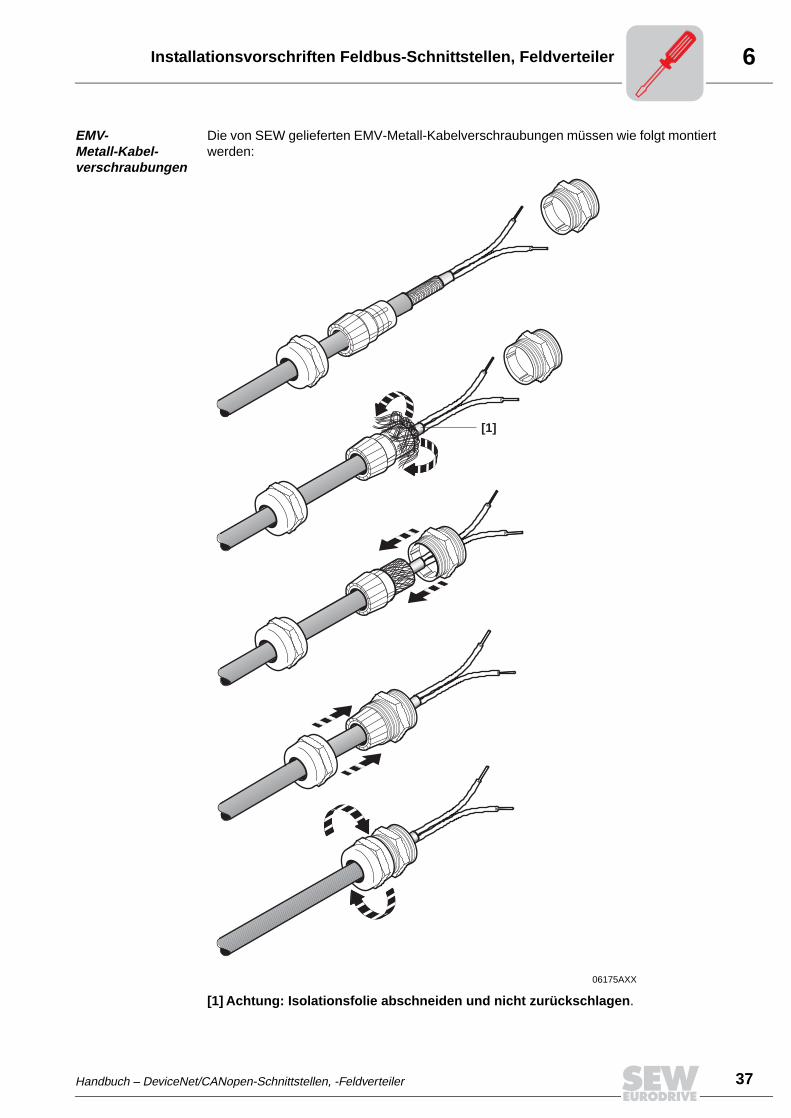
EMV- Metall-Kabel-verschraubungen
Die von SEW gelieferten EMV-Metall-Kabelverschraubungen müssen wie folgt montiertwerden:
[1] Achtung: Isolationsfolie abschneiden und nicht zurückschlagen.
06175AXX
[1]
6
38 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Installationsvorschriften Feldbus-Schnittstellen, Feldverteiler
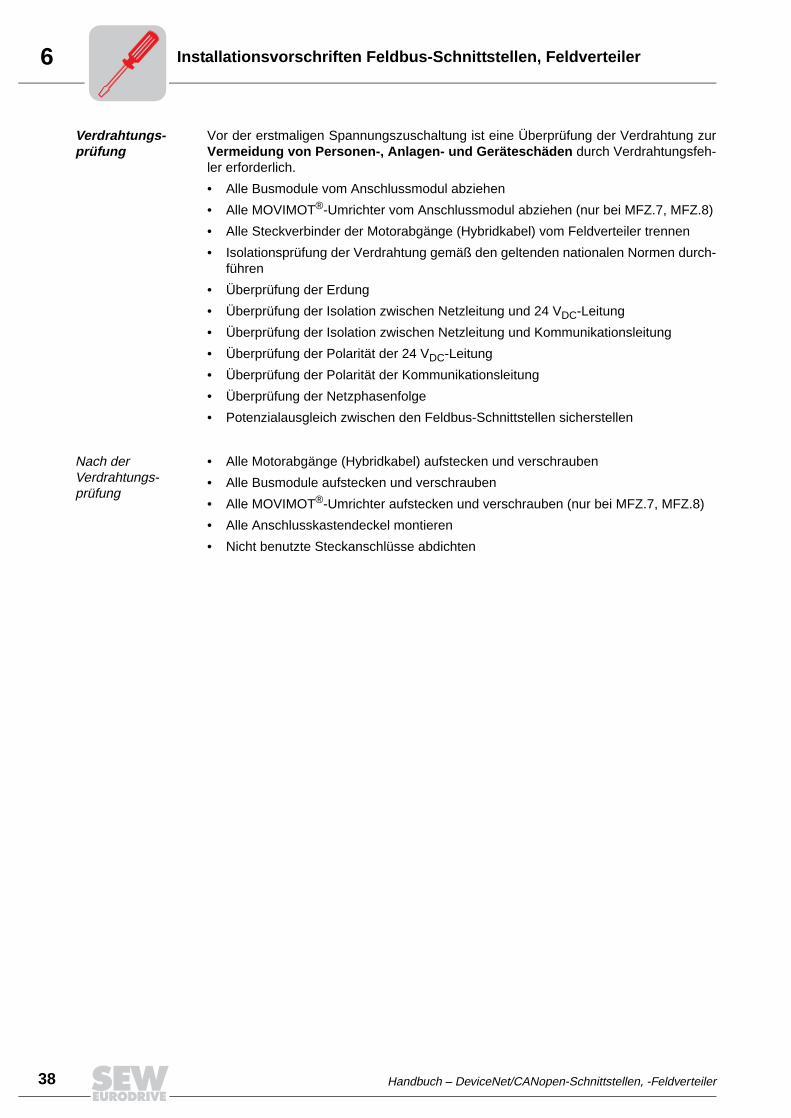
Verdrahtungs-prüfung
Vor der erstmaligen Spannungszuschaltung ist eine Überprüfung der Verdrahtung zurVermeidung von Personen-, Anlagen- und Geräteschäden durch Verdrahtungsfeh-ler erforderlich.
• Alle Busmodule vom Anschlussmodul abziehen
• Alle MOVIMOT®-Umrichter vom Anschlussmodul abziehen (nur bei MFZ.7, MFZ.8)
• Alle Steckverbinder der Motorabgänge (Hybridkabel) vom Feldverteiler trennen
• Isolationsprüfung der Verdrahtung gemäß den geltenden nationalen Normen durch-führen
• Überprüfung der Erdung
• Überprüfung der Isolation zwischen Netzleitung und 24 VDC-Leitung
• Überprüfung der Isolation zwischen Netzleitung und Kommunikationsleitung
• Überprüfung der Polarität der 24 VDC-Leitung
• Überprüfung der Polarität der Kommunikationsleitung
• Überprüfung der Netzphasenfolge
• Potenzialausgleich zwischen den Feldbus-Schnittstellen sicherstellen
Nach der Verdrahtungs-prüfung
• Alle Motorabgänge (Hybridkabel) aufstecken und verschrauben
• Alle Busmodule aufstecken und verschrauben
• Alle MOVIMOT®-Umrichter aufstecken und verschrauben (nur bei MFZ.7, MFZ.8)
• Alle Anschlusskastendeckel montieren
• Nicht benutzte Steckanschlüsse abdichten
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 39
6Anschluss mit DeviceNet
6.3 Anschluss mit DeviceNet
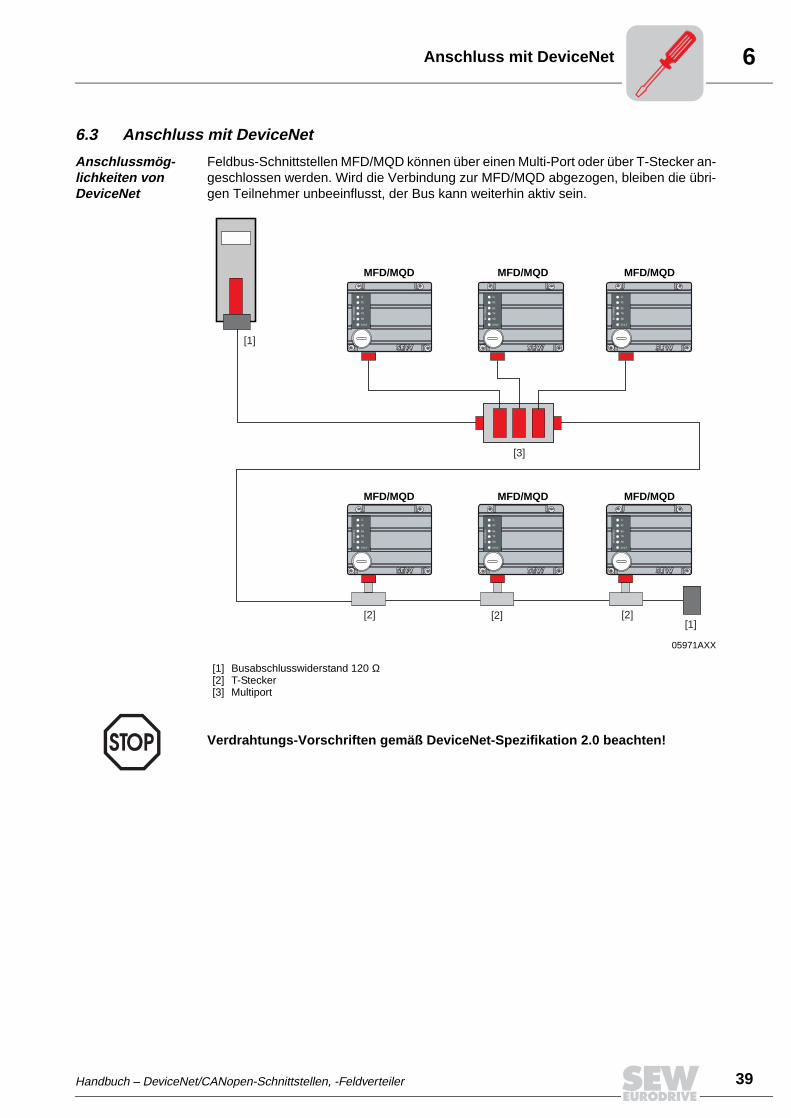
Anschlussmög-lichkeiten von DeviceNet
Feldbus-Schnittstellen MFD/MQD können über einen Multi-Port oder über T-Stecker an-geschlossen werden. Wird die Verbindung zur MFD/MQD abgezogen, bleiben die übri-gen Teilnehmer unbeeinflusst, der Bus kann weiterhin aktiv sein.
05971AXX
[1] Busabschlusswiderstand 120 Ω[2] T-Stecker[3] Multiport
MF
I IN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MFD/MQD MFD/MQDMFD/MQD
MFD/MQD MFD/MQDMFD/MQD
[1][2] [2] [2]
[3]
[1]
Verdrahtungs-Vorschriften gemäß DeviceNet-Spezifikation 2.0 beachten!
6
40 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit DeviceNet
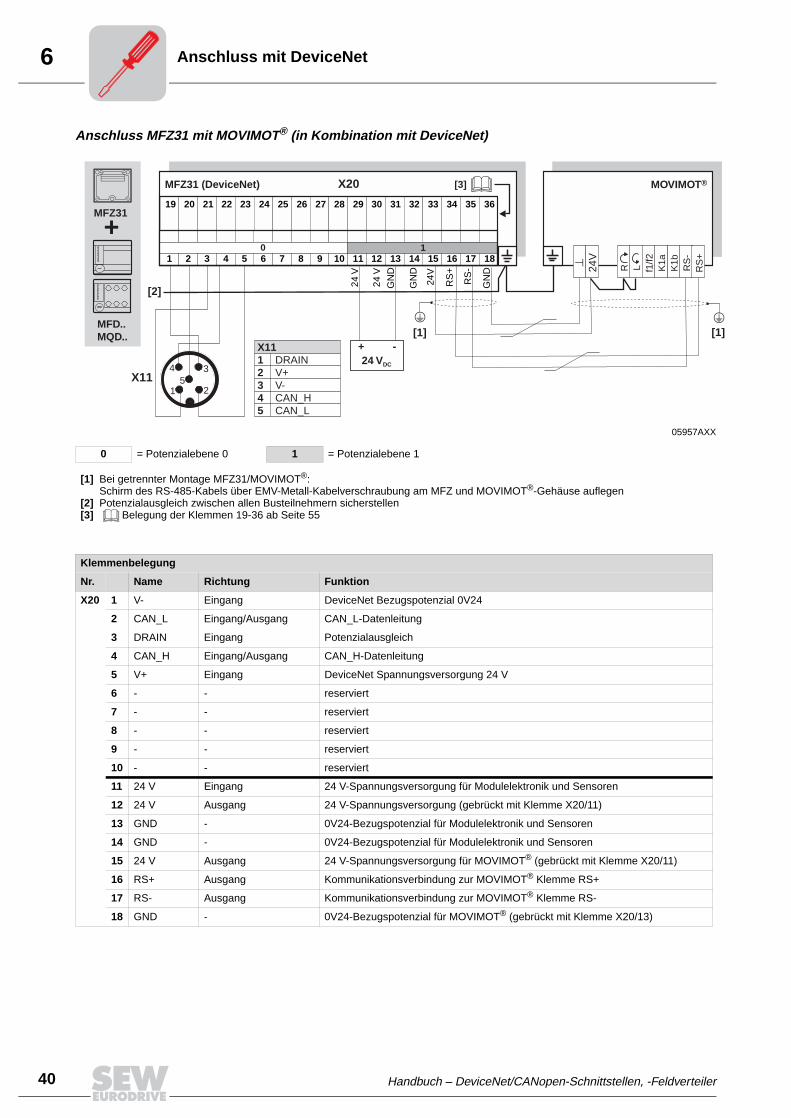
Anschluss MFZ31 mit MOVIMOT® (in Kombination mit DeviceNet)
05957AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
[1] Bei getrennter Montage MFZ31/MOVIMOT®:Schirm des RS-485-Kabels über EMV-Metall-Kabelverschraubung am MFZ und MOVIMOT®-Gehäuse auflegen
[2] Potenzialausgleich zwischen allen Busteilnehmern sicherstellen[3] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
24V
RS
+
RS
-
GN
D
0 1
MFZ31 (DeviceNet)
24 VDC
+ -
4
21
35
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT®[3]
[2]
[1] [1]
X11
X20
+MFZ31
MFD..MQD..
X1112345
DRAINV+V-CAN_HCAN_L
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6 - - reserviert
7 - - reserviert
8 - - reserviert
9 - - reserviert
10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 24 V Ausgang 24 V-Spannungsversorgung für MOVIMOT® (gebrückt mit Klemme X20/11)
16 RS+ Ausgang Kommunikationsverbindung zur MOVIMOT® Klemme RS+
17 RS- Ausgang Kommunikationsverbindung zur MOVIMOT® Klemme RS-
18 GND - 0V24-Bezugspotenzial für MOVIMOT® (gebrückt mit Klemme X20/13)
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 41
6Anschluss mit DeviceNet
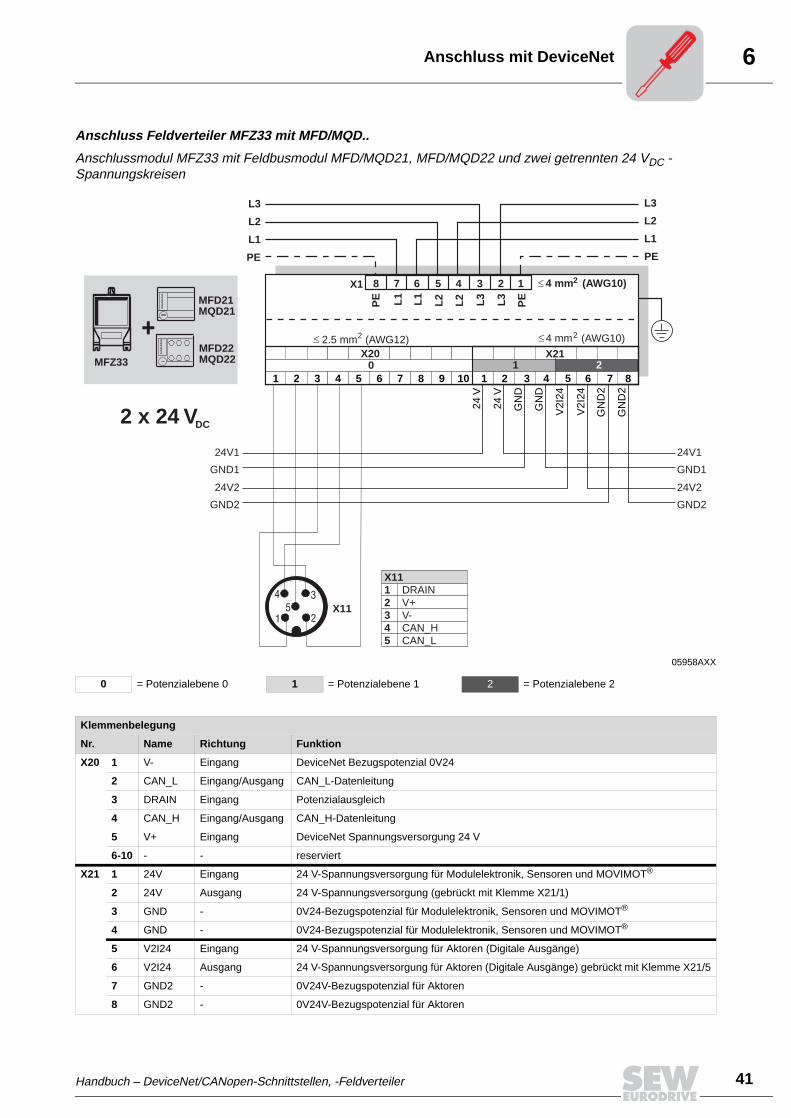
Anschluss Feldverteiler MFZ33 mit MFD/MQD..
Anschlussmodul MFZ33 mit Feldbusmodul MFD/MQD21, MFD/MQD22 und zwei getrennten 24 VDC -Spannungskreisen
05958AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
8 7 6 5 4 3 2 1
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)2X1
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
PE L1
L1
L2
L2 L3
L3
PE
4 mm (AWG10)
24V1
GND1
24V1
GND1
24V2
GND2
24V2
GND2
2.5 mm (AWG12)
0 1 2
2 2
X20
X11
X21
4
21
35
+MFD21
MFD22
2 x 24 VDC
MQD21
MQD22MFZ33
X1112345
DRAINV+V-CAN_HCAN_L
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6-10 - - reserviert
X21 1 24V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
6 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X21/5
7 GND2 - 0V24V-Bezugspotenzial für Aktoren
8 GND2 - 0V24V-Bezugspotenzial für Aktoren
6
42 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit DeviceNet
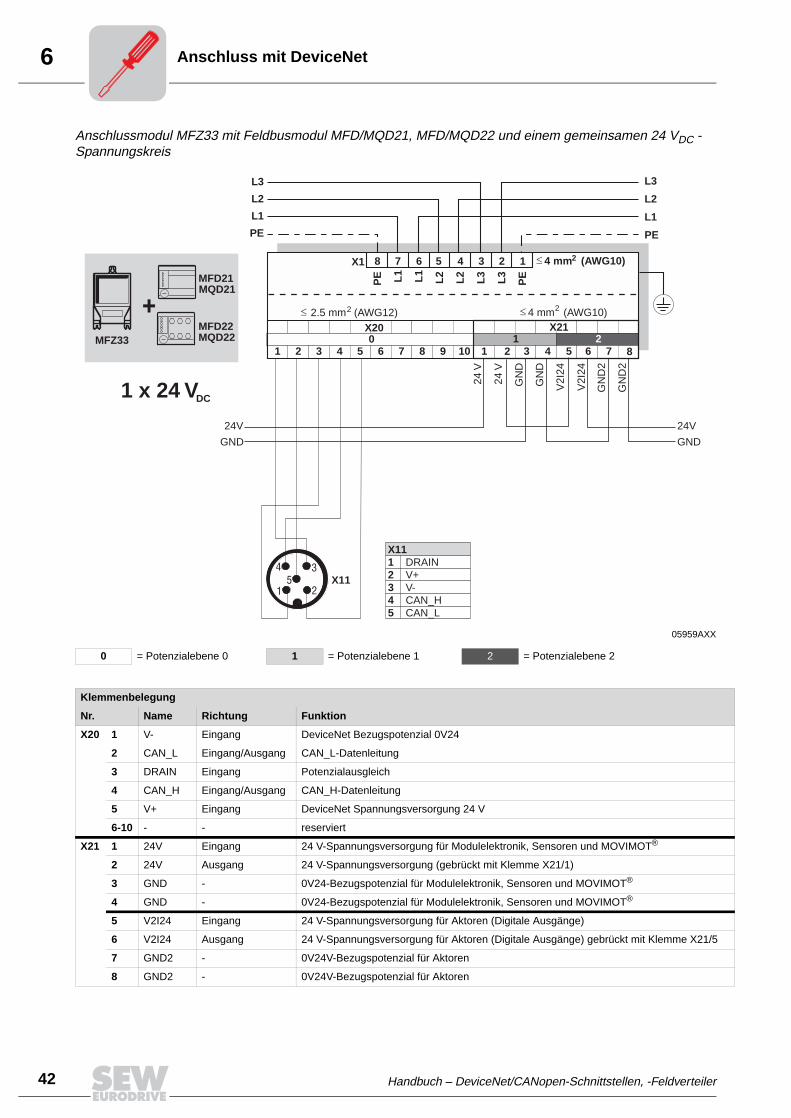
Anschlussmodul MFZ33 mit Feldbusmodul MFD/MQD21, MFD/MQD22 und einem gemeinsamen 24 VDC -Spannungskreis
05959AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
8 7 6 5 4 3 2 1
PE L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)
24V
GND
24V
GND
0 1 2
2X1
X20
X11
X214 mm (AWG10)2.5 mm (AWG12)2 2
4
21
35
+MFD21
MFD22
1 x 24 VDC
MQD21
MQD22MFZ33
X1112345
DRAINV+V-CAN_HCAN_L
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6-10 - - reserviert
X21 1 24V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
6 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X21/5
7 GND2 - 0V24V-Bezugspotenzial für Aktoren
8 GND2 - 0V24V-Bezugspotenzial für Aktoren
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 43
6Anschluss mit DeviceNet
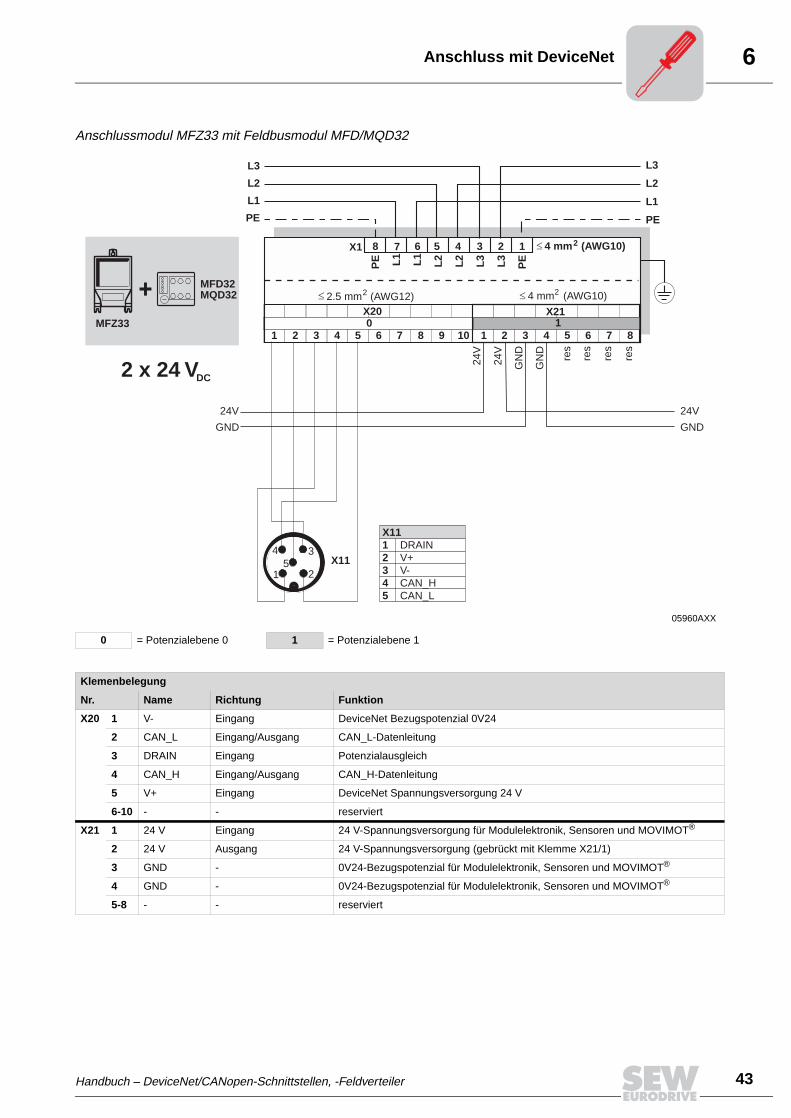
Anschlussmodul MFZ33 mit Feldbusmodul MFD/MQD32
05960AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
8 7 6 5 4 3 2 1
PE L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)2X1
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
res.
24V
GND
24V
GND
0X20 X21
res.
res.
res.
1
4 mm (AWG10)2.5 mm (AWG12)2 2
4
21
35 X11
+ MFD32MQD32
MFZ33
2 x 24 VDC
X1112345
DRAINV+V-CAN_HCAN_L
Klemenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6-10 - - reserviert
X21 1 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5-8 - - reserviert
6
44 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit DeviceNet
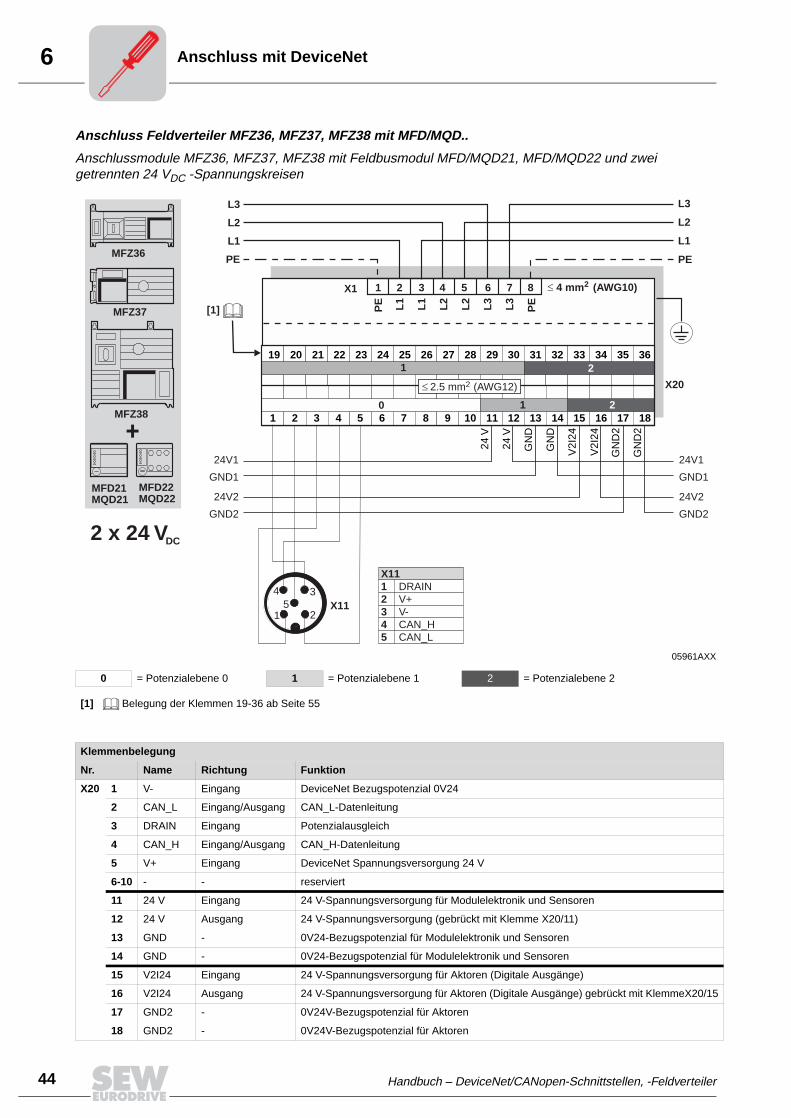
Anschluss Feldverteiler MFZ36, MFZ37, MFZ38 mit MFD/MQD..
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFD/MQD21, MFD/MQD22 und zwei getrennten 24 VDC -Spannungskreisen
05961AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
[1] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
1 2 3 4 5 6 7 8
PE L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)2
[1]
X1
0 1 2
1 2
2.5 mm (AWG12)2 X20
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
24V1
GND1
24V1
GND1
24V2
GND2
24V2
GND2
4
21
35 X11
+
MFZ36
MFZ37
MFZ38
MFD21 MFD22
2 x 24 VDC
MQD21 MQD22
X1112345
DRAINV+V-CAN_HCAN_L
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6-10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
16 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit KlemmeX20/15
17 GND2 - 0V24V-Bezugspotenzial für Aktoren
18 GND2 - 0V24V-Bezugspotenzial für Aktoren
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 45
6Anschluss mit DeviceNet
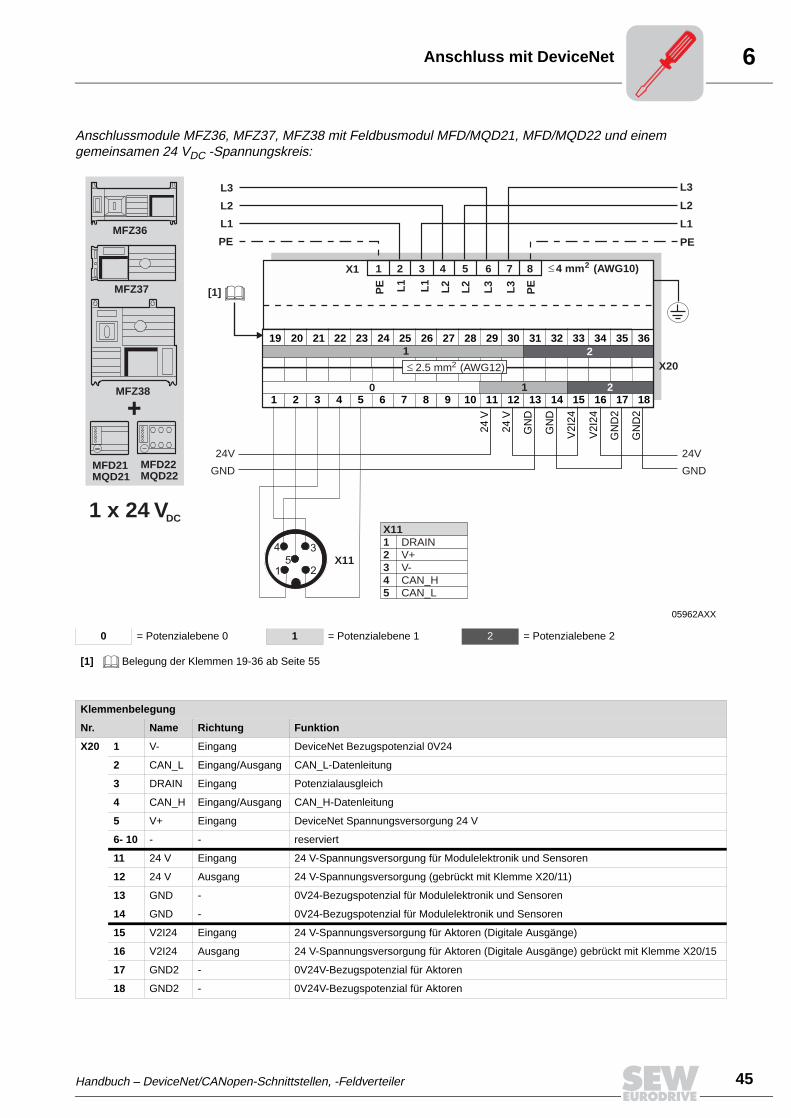
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFD/MQD21, MFD/MQD22 und einem gemeinsamen 24 VDC -Spannungskreis:
05962AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
[1] Belegung der Klemmen 19-36 ab Seite 55
X1
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
1 2 3 4 5 6 7 8 4 mm (AWG10)
24V
GND
24V
GND
0 1 2
1 2
PE L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
2
2.5 mm (AWG12)2 X20
4
21
35 X11
+
MFZ36
MFZ37
MFZ38
MFD21 MFD22
1 x 24 VDC
MQD21 MQD22
X1112345
DRAINV+V-CAN_HCAN_L
[1]
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6- 10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
16 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X20/15
17 GND2 - 0V24V-Bezugspotenzial für Aktoren
18 GND2 - 0V24V-Bezugspotenzial für Aktoren
6
46 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit DeviceNet
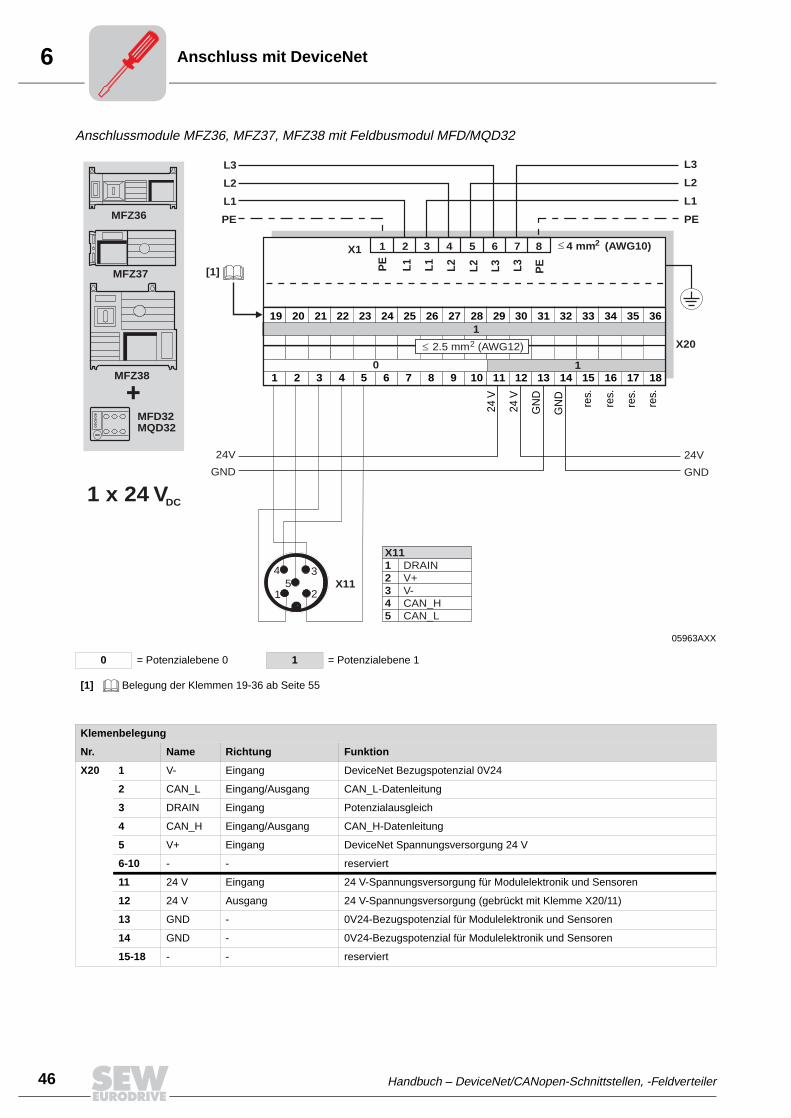
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFD/MQD32
05963AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
[1] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
res.
res.
res.
res.
1 2 3 4 5 6 7 8
PE
L1 L1 L2 L2 L3 L3 PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)
24V
GND
24V
GND
4
21
35
0 1
1
2
2.5 mm (AWG12)2
X1
X11
X20
+
MFZ36
MFZ37
MFZ38
MFD32
1 x 24 VDC
MQD32
X1112345
DRAINV+V-CAN_HCAN_L
[1]
Klemenbelegung
Nr. Name Richtung Funktion
X20 1 V- Eingang DeviceNet Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 DRAIN Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 V+ Eingang DeviceNet Spannungsversorgung 24 V
6-10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15-18 - - reserviert
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 47
6Anschluss mit CANopen
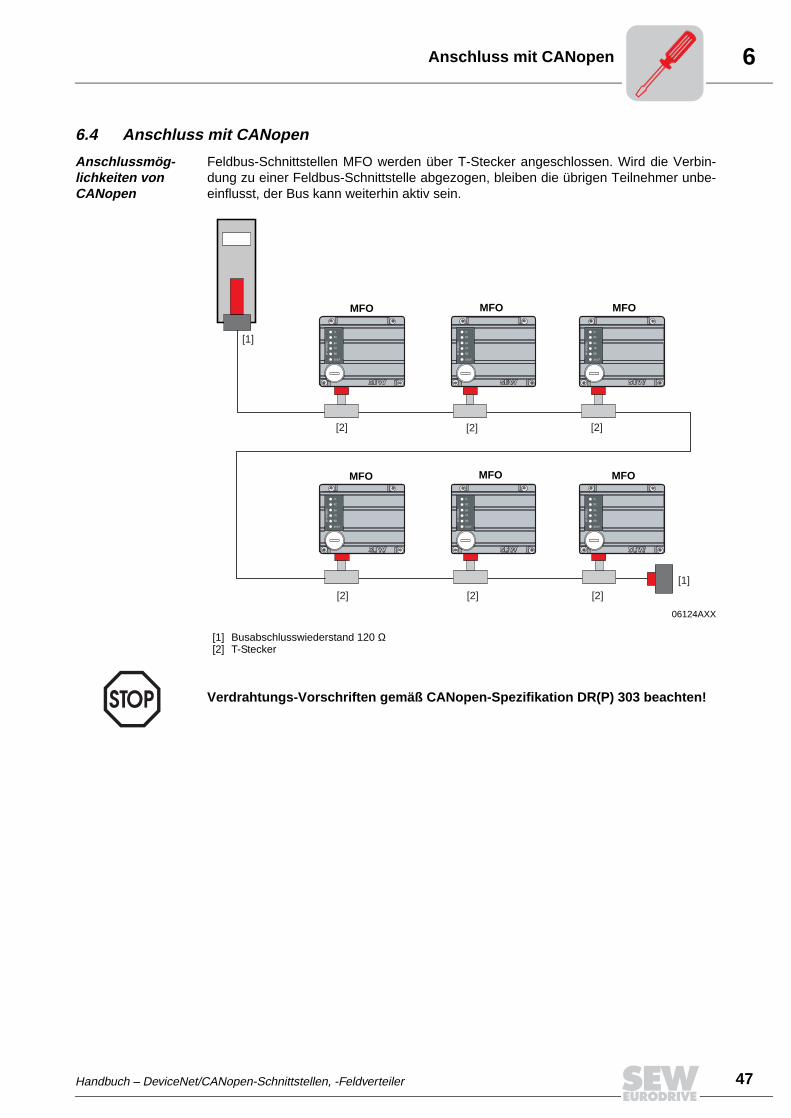
6.4 Anschluss mit CANopen
Anschlussmög-lichkeiten von CANopen
Feldbus-Schnittstellen MFO werden über T-Stecker angeschlossen. Wird die Verbin-dung zu einer Feldbus-Schnittstelle abgezogen, bleiben die übrigen Teilnehmer unbe-einflusst, der Bus kann weiterhin aktiv sein.
06124AXX
[1] Busabschlusswiederstand 120 Ω[2] T-Stecker
MF
I IN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
MF
IIN
TE
RB
US
SYS-F
RD
TR
BA
RC
UL
[1]
MFO
MFO
MFO
MFO
MFO
MFO
[1]
[2]
[2]
[2]
[2]
[2]
[2]
Verdrahtungs-Vorschriften gemäß CANopen-Spezifikation DR(P) 303 beachten!
6
48 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit CANopen
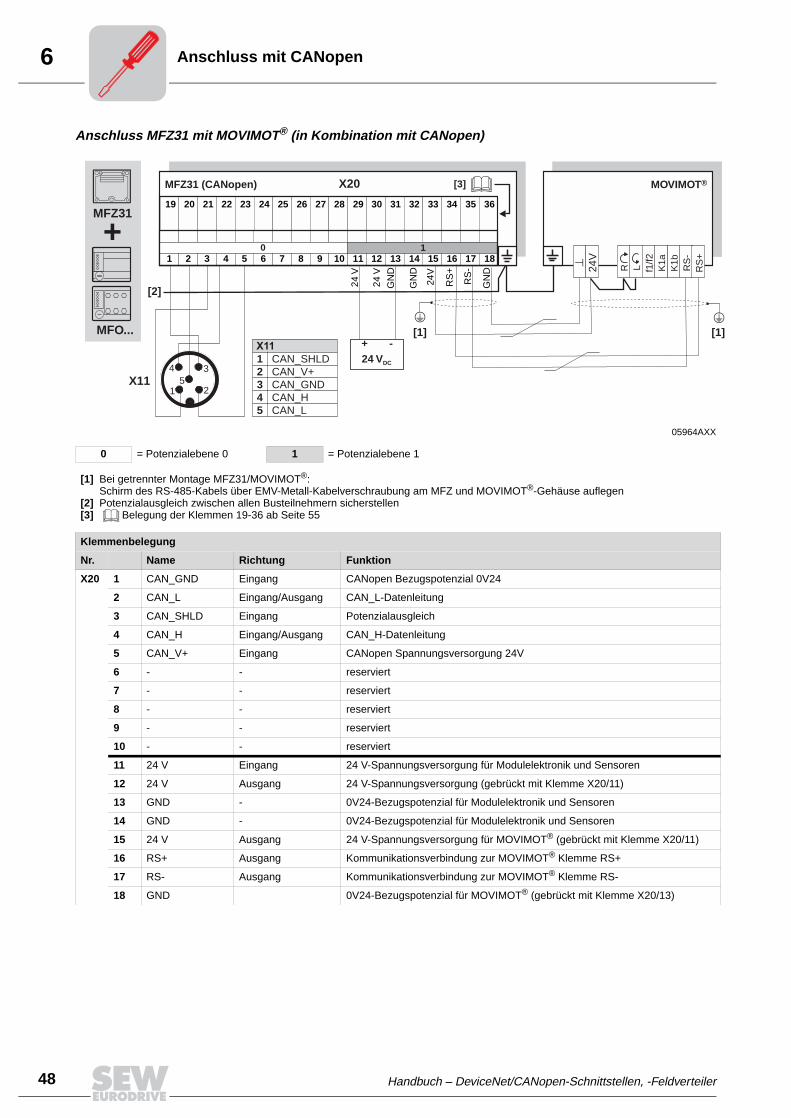
Anschluss MFZ31 mit MOVIMOT® (in Kombination mit CANopen)
05964AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
[1] Bei getrennter Montage MFZ31/MOVIMOT®:Schirm des RS-485-Kabels über EMV-Metall-Kabelverschraubung am MFZ und MOVIMOT®-Gehäuse auflegen
[2] Potenzialausgleich zwischen allen Busteilnehmern sicherstellen[3] Belegung der Klemmen 19-36 ab Seite 55
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6 - - reserviert
7 - - reserviert
8 - - reserviert
9 - - reserviert
10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 24 V Ausgang 24 V-Spannungsversorgung für MOVIMOT® (gebrückt mit Klemme X20/11)
16 RS+ Ausgang Kommunikationsverbindung zur MOVIMOT® Klemme RS+
17 RS- Ausgang Kommunikationsverbindung zur MOVIMOT® Klemme RS-
18 GND 0V24-Bezugspotenzial für MOVIMOT® (gebrückt mit Klemme X20/13)
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
24V
RS
+
RS
-
GN
D
0 1
MFZ31 (CANopen)
24 VDC
+ -
4
21
35
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT®[3]
+MFZ31
MFO...
[2]
[1] [1]
X20
X11
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 49
6Anschluss mit CANopen
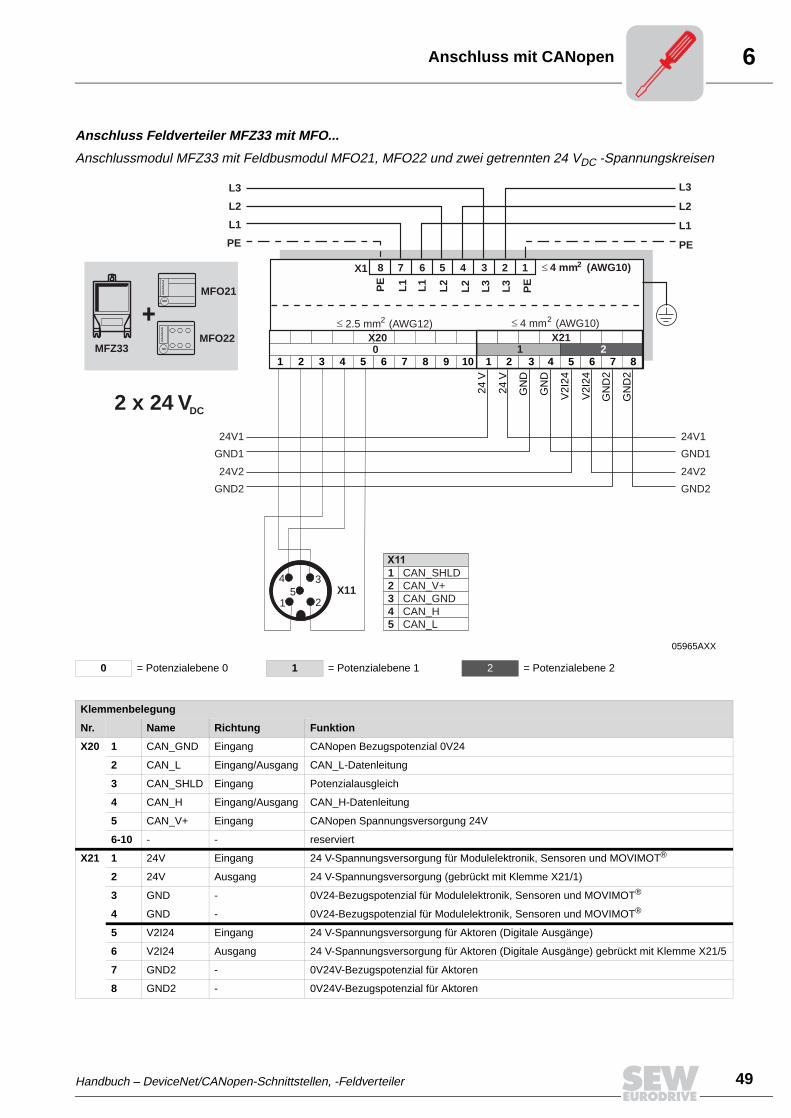
Anschluss Feldverteiler MFZ33 mit MFO...
Anschlussmodul MFZ33 mit Feldbusmodul MFO21, MFO22 und zwei getrennten 24 VDC -Spannungskreisen
05965AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
8 7 6 5 4 3 2 1
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)2X1
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
PE
L1
L1
L2
L2
L3
L3
PE
4 mm (AWG10)
24V1
GND1
24V1
GND1
24V2
GND2
24V2
GND2
2.5 mm (AWG12)
0 1 2
2 2
X20
X11
X21
4
21
35
+MFO21
MFO22
2 x 24 VDC
MFZ33
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
X21 1 24V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
6 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X21/5
7 GND2 - 0V24V-Bezugspotenzial für Aktoren
8 GND2 - 0V24V-Bezugspotenzial für Aktoren
6
50 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit CANopen
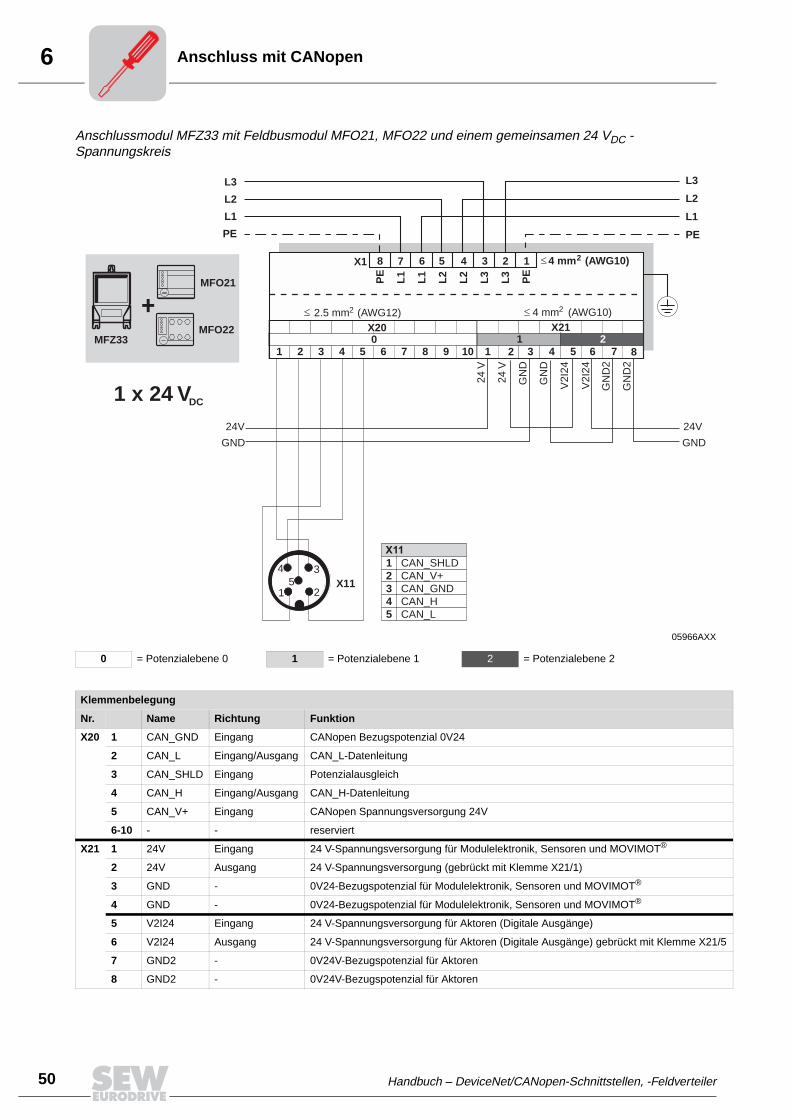
Anschlussmodul MFZ33 mit Feldbusmodul MFO21, MFO22 und einem gemeinsamen 24 VDC -Spannungskreis
05966AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
8 7 6 5 4 3 2 1
PE
L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)
24V
GND
24V
GND
0 1 2
2X1
X20
X11
X214 mm (AWG10)2.5 mm (AWG12)2 2
4
21
35
+MFO21
MFO22
1 x 24 VDC
MFZ33
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
X21 1 24V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
6 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X21/5
7 GND2 - 0V24V-Bezugspotenzial für Aktoren
8 GND2 - 0V24V-Bezugspotenzial für Aktoren
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 51
6Anschluss mit CANopen
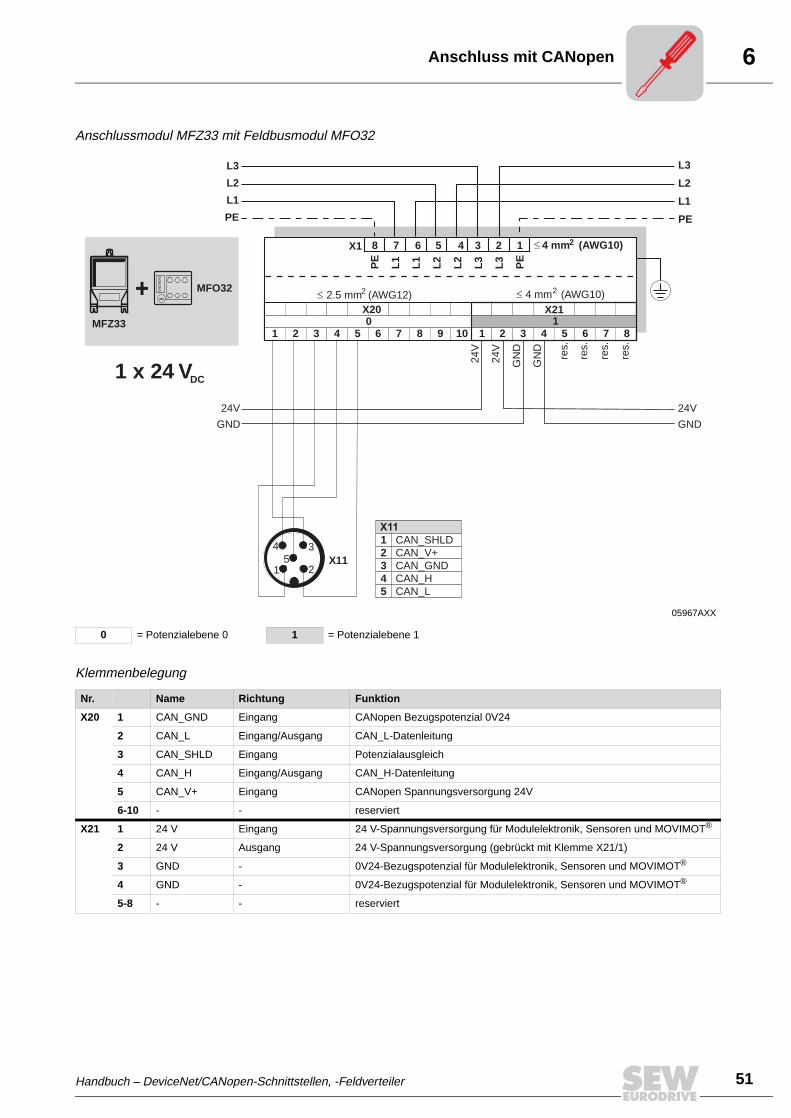
Anschlussmodul MFZ33 mit Feldbusmodul MFO32
Klemmenbelegung
05967AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
8 7 6 5 4 3 2 1
PE
L1
L1
L2
L2
L3
L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)2X1
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8
24V
24V
GN
D
GN
D
res.
24V
GND
24V
GND
0X20
X11
X21
res.
res.
res.
1
4 mm (AWG10)2.5 mm (AWG12)2 2
4
21
35
+ MFO32
1 x 24 VDC
MFZ33
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
X21 1 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik, Sensoren und MOVIMOT®
2 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X21/1)
3 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
4 GND - 0V24-Bezugspotenzial für Modulelektronik, Sensoren und MOVIMOT®
5-8 - - reserviert
6
52 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit CANopen
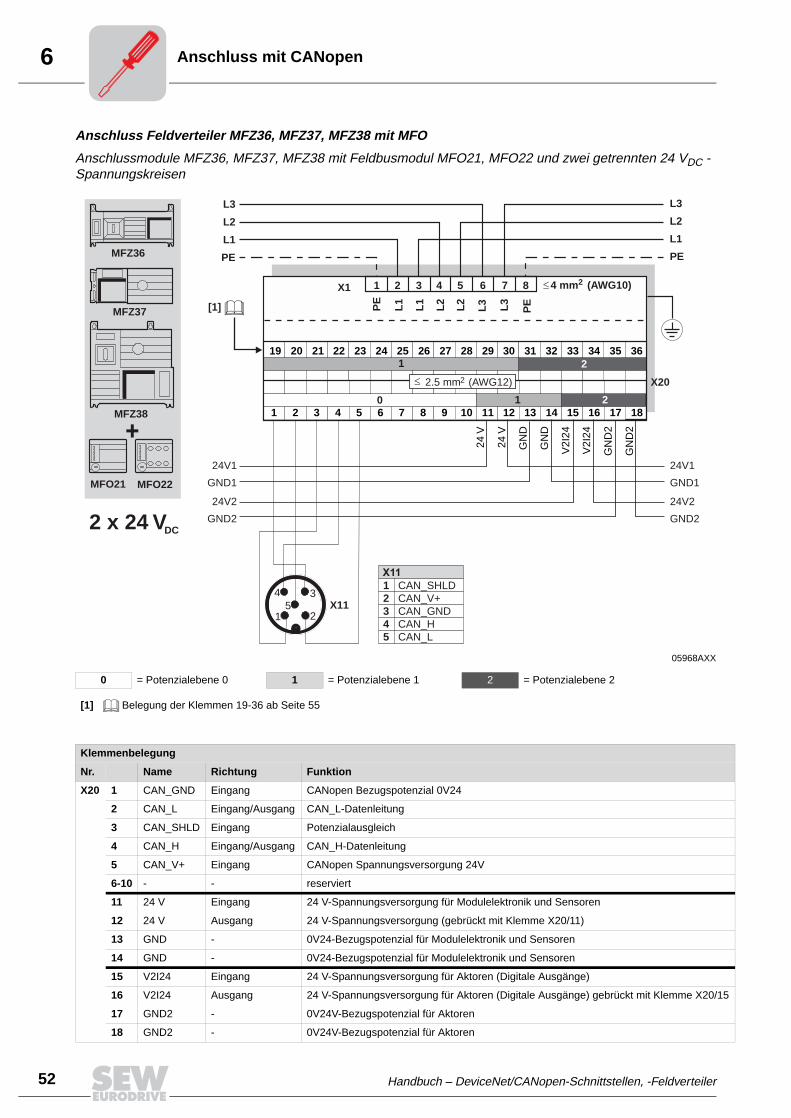
Anschluss Feldverteiler MFZ36, MFZ37, MFZ38 mit MFO
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFO21, MFO22 und zwei getrennten 24 VDC -Spannungskreisen
05968AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
[1] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
1 2 3 4 5 6 7 8
PE
L1
L1
L2
L2
L3 L3
PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)
24V1
GND1
24V1
GND1
24V2
GND2
24V2
GND2
2
0 1 2
1 2
2.5 mm (AWG12)2
4
21
35
X20
X11
X1
+
MFZ36
MFZ37
MFZ38
MFO21 MFO22
2 x 24 VDC
[1]
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
16 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X20/15
17 GND2 - 0V24V-Bezugspotenzial für Aktoren
18 GND2 - 0V24V-Bezugspotenzial für Aktoren
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 53
6Anschluss mit CANopen
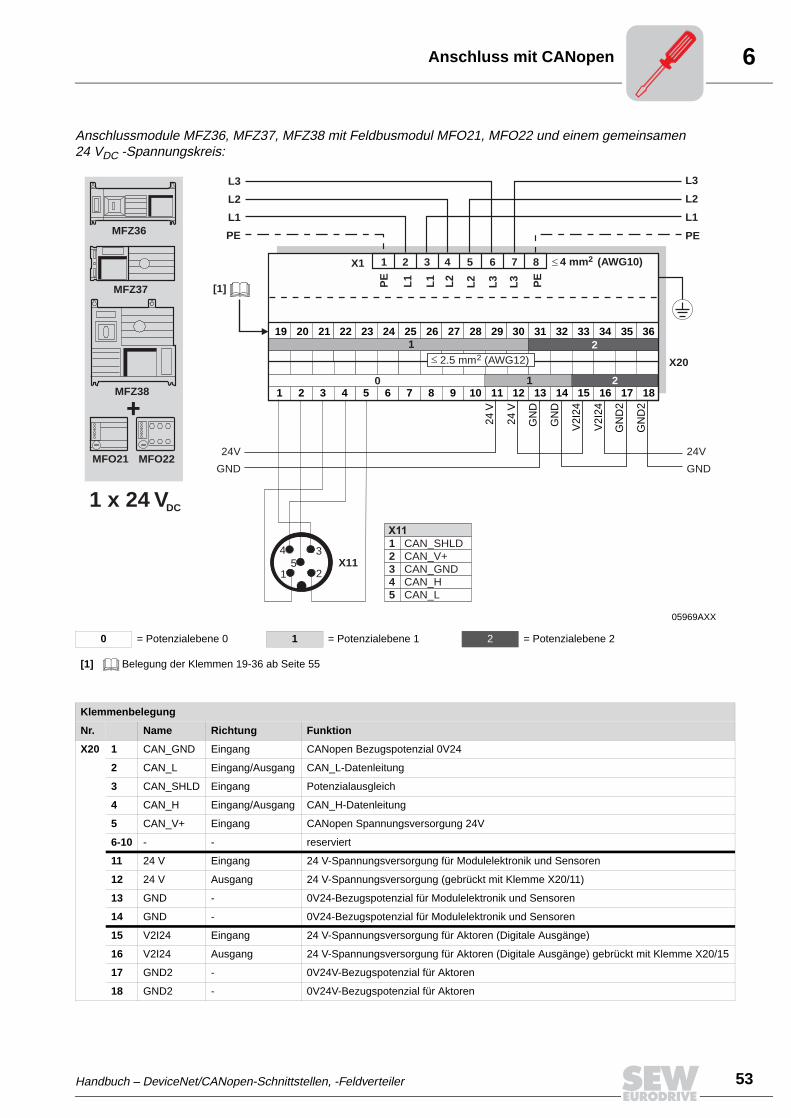
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFO21, MFO22 und einem gemeinsamen 24 VDC -Spannungskreis:
05969AXX
0 = Potenzialebene 0 1 = Potenzialebene 1 2 = Potenzialebene 2
[1] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
V2I
24
V2I
24
GN
D2
GN
D2
1 2 3 4 5 6 7 8 4 mm (AWG10)
24V
GND
24V
GND
4
21
35
0 1 2
1
X1
X20
2
PE
L1
L1
L2
L2
L3
L3 PE
L3
L2
L1
PE
L3
L2
L1
PE
2
2.5 mm (AWG12)2
X11
+
MFZ36
MFZ37
MFZ38
MFO21 MFO22
1 x 24 VDC
[1]
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15 V2I24 Eingang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge)
16 V2I24 Ausgang 24 V-Spannungsversorgung für Aktoren (Digitale Ausgänge) gebrückt mit Klemme X20/15
17 GND2 - 0V24V-Bezugspotenzial für Aktoren
18 GND2 - 0V24V-Bezugspotenzial für Aktoren
6
54 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss mit CANopen
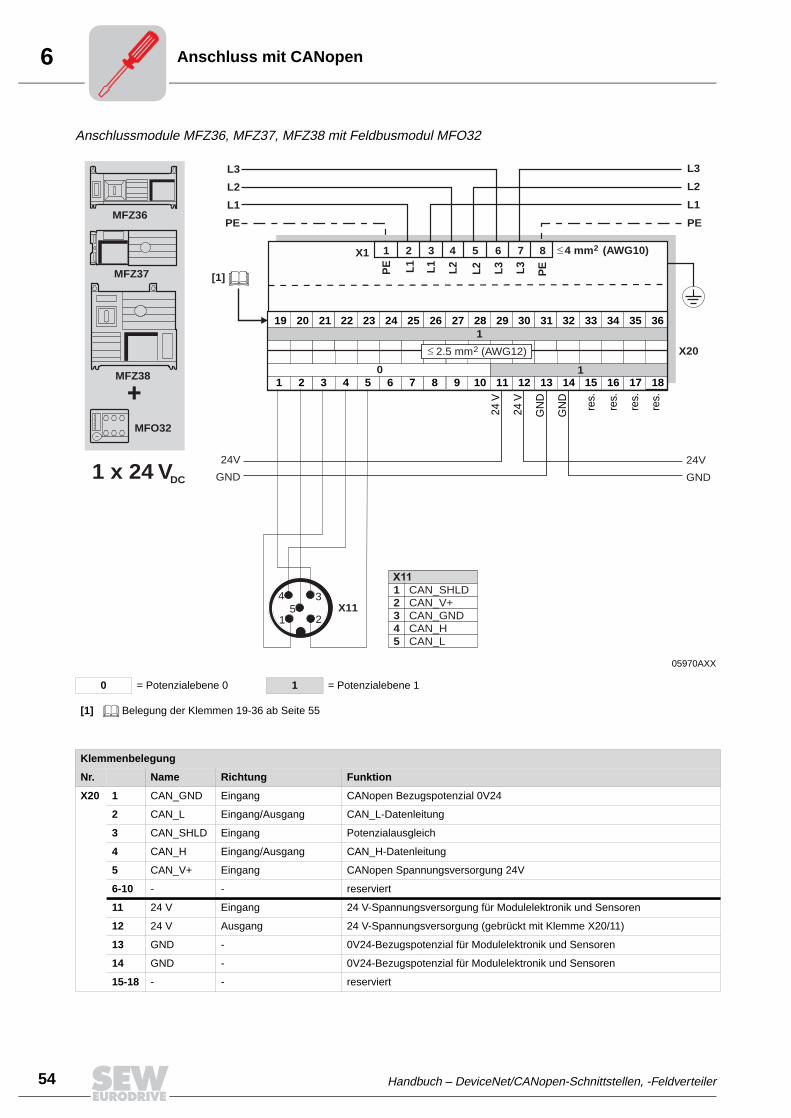
Anschlussmodule MFZ36, MFZ37, MFZ38 mit Feldbusmodul MFO32
05970AXX
0 = Potenzialebene 0 1 = Potenzialebene 1
[1] Belegung der Klemmen 19-36 ab Seite 55
1
19
2
20
3
21
4
22
5
23
6
24
7
25
8
26
9
27
10
28
11
29
12
30
13
31
14
32
15
33
16
34
17
35
18
36
24V
24V
GN
D
GN
D
res.
res.
res.
res.
1 2 3 4 5 6 7 8
PE L1 L1 L2 L2 L3 L3 PE
L3
L2
L1
PE
L3
L2
L1
PE
4 mm (AWG10)
24V
GND
24V
GND
4
21
35
0 1
1
2
2.5 mm (AWG12)2
X1
X20
X11
+
MFZ36
MFZ37
MFZ38
MFO32
1 x 24 VDC
[1]
12345
CAN_SHLDCAN_V+CAN_GNDCAN_HCAN_L
X11
Klemmenbelegung
Nr. Name Richtung Funktion
X20 1 CAN_GND Eingang CANopen Bezugspotenzial 0V24
2 CAN_L Eingang/Ausgang CAN_L-Datenleitung
3 CAN_SHLD Eingang Potenzialausgleich
4 CAN_H Eingang/Ausgang CAN_H-Datenleitung
5 CAN_V+ Eingang CANopen Spannungsversorgung 24V
6-10 - - reserviert
11 24 V Eingang 24 V-Spannungsversorgung für Modulelektronik und Sensoren
12 24 V Ausgang 24 V-Spannungsversorgung (gebrückt mit Klemme X20/11)
13 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
14 GND - 0V24-Bezugspotenzial für Modulelektronik und Sensoren
15-18 - - reserviert
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 55
6Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ..
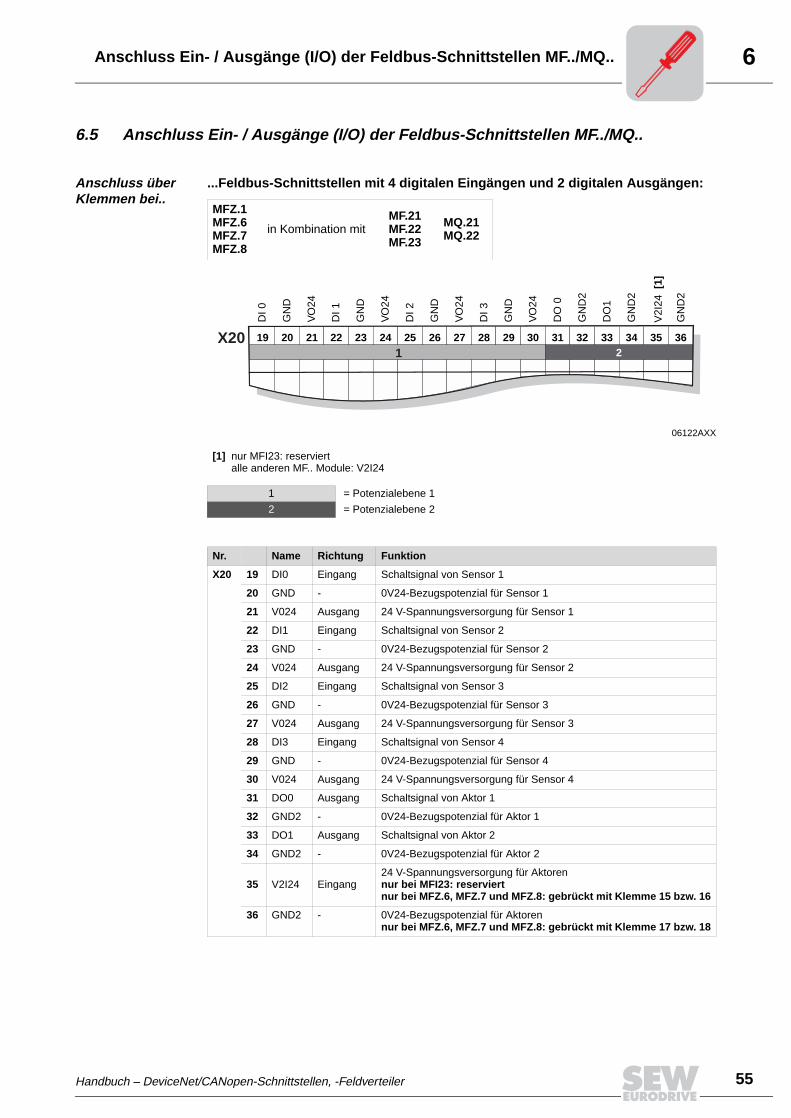
6.5 Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ..
Anschluss über Klemmen bei..
...Feldbus-Schnittstellen mit 4 digitalen Eingängen und 2 digitalen Ausgängen:
MFZ.1MFZ.6MFZ.7MFZ.8
in Kombination mitMF.21MF.22MF.23
MQ.21MQ.22
06122AXX
[1] nur MFI23: reserviertalle anderen MF.. Module: V2I24
1 = Potenzialebene 1
2 = Potenzialebene 2
Nr. Name Richtung Funktion
X20 19 DI0 Eingang Schaltsignal von Sensor 1
20 GND - 0V24-Bezugspotenzial für Sensor 1
21 V024 Ausgang 24 V-Spannungsversorgung für Sensor 1
22 DI1 Eingang Schaltsignal von Sensor 2
23 GND - 0V24-Bezugspotenzial für Sensor 2
24 V024 Ausgang 24 V-Spannungsversorgung für Sensor 2
25 DI2 Eingang Schaltsignal von Sensor 3
26 GND - 0V24-Bezugspotenzial für Sensor 3
27 V024 Ausgang 24 V-Spannungsversorgung für Sensor 3
28 DI3 Eingang Schaltsignal von Sensor 4
29 GND - 0V24-Bezugspotenzial für Sensor 4
30 V024 Ausgang 24 V-Spannungsversorgung für Sensor 4
31 DO0 Ausgang Schaltsignal von Aktor 1
32 GND2 - 0V24-Bezugspotenzial für Aktor 1
33 DO1 Ausgang Schaltsignal von Aktor 2
34 GND2 - 0V24-Bezugspotenzial für Aktor 2
35 V2I24 Eingang24 V-Spannungsversorgung für Aktorennur bei MFI23: reserviertnur bei MFZ.6, MFZ.7 und MFZ.8: gebrückt mit Klemme 15 bzw. 16
36 GND2 - 0V24-Bezugspotenzial für Aktorennur bei MFZ.6, MFZ.7 und MFZ.8: gebrückt mit Klemme 17 bzw. 18
19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
DI 0
GN
D
VO
24
DI 1
GN
D
VO
24
DI 2
GN
D
VO
24
DI 3
GN
D
VO
24
DO
0
GN
D2
DO
1
GN
D2
GN
D2
1 2X20
V2I
24[1
]
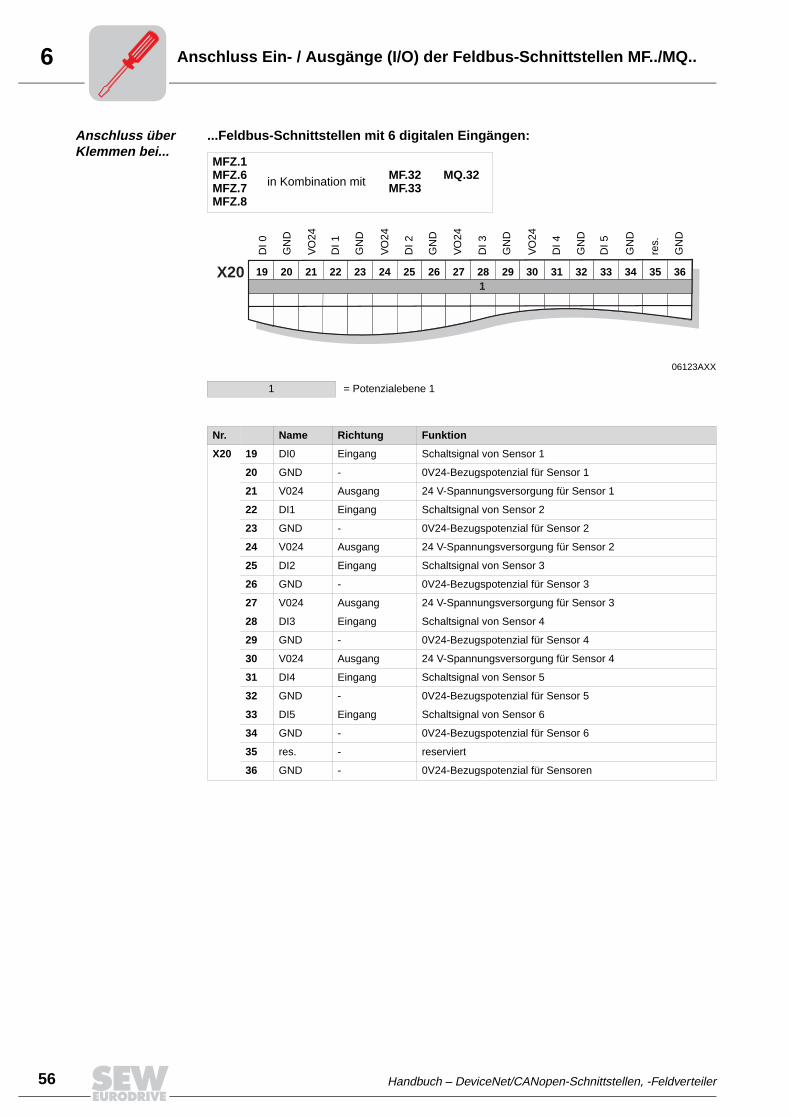
6
56 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ..
Anschluss über Klemmen bei...
...Feldbus-Schnittstellen mit 6 digitalen Eingängen:
MFZ.1MFZ.6MFZ.7MFZ.8
in Kombination mit MF.32 MF.33
MQ.32
06123AXX
1 = Potenzialebene 1
Nr. Name Richtung Funktion
X20 19 DI0 Eingang Schaltsignal von Sensor 1
20 GND - 0V24-Bezugspotenzial für Sensor 1
21 V024 Ausgang 24 V-Spannungsversorgung für Sensor 1
22 DI1 Eingang Schaltsignal von Sensor 2
23 GND - 0V24-Bezugspotenzial für Sensor 2
24 V024 Ausgang 24 V-Spannungsversorgung für Sensor 2
25 DI2 Eingang Schaltsignal von Sensor 3
26 GND - 0V24-Bezugspotenzial für Sensor 3
27 V024 Ausgang 24 V-Spannungsversorgung für Sensor 3
28 DI3 Eingang Schaltsignal von Sensor 4
29 GND - 0V24-Bezugspotenzial für Sensor 4
30 V024 Ausgang 24 V-Spannungsversorgung für Sensor 4
31 DI4 Eingang Schaltsignal von Sensor 5
32 GND - 0V24-Bezugspotenzial für Sensor 5
33 DI5 Eingang Schaltsignal von Sensor 6
34 GND - 0V24-Bezugspotenzial für Sensor 6
35 res. - reserviert
36 GND - 0V24-Bezugspotenzial für Sensoren
19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36D
I 0
GN
D
VO
24
DI 1
GN
D
VO
24
DI 2
GN
D
VO
24
DI 3
GN
D
VO
24
DI 4
GN
D
DI 5
GN
D
res.
GN
D
1X20
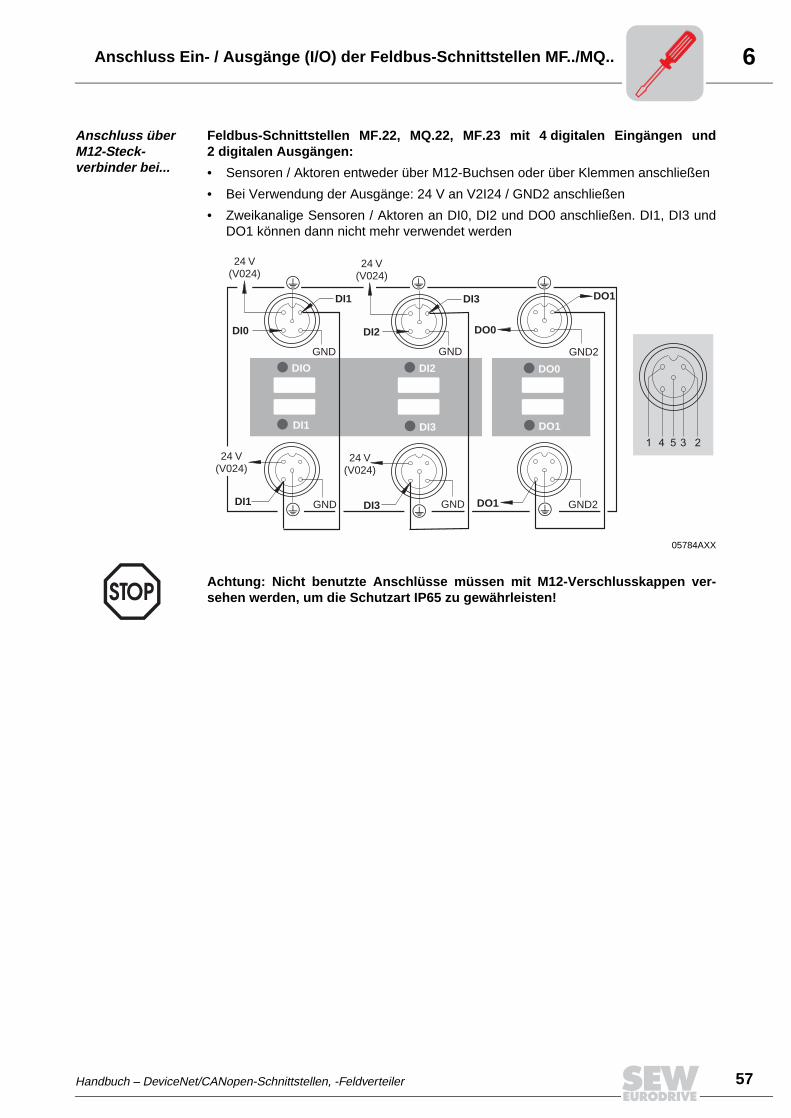
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 57
6Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ..
Anschluss über M12-Steck-verbinder bei...
Feldbus-Schnittstellen MF.22, MQ.22, MF.23 mit 4 digitalen Eingängen und2 digitalen Ausgängen:
• Sensoren / Aktoren entweder über M12-Buchsen oder über Klemmen anschließen
• Bei Verwendung der Ausgänge: 24 V an V2I24 / GND2 anschließen
• Zweikanalige Sensoren / Aktoren an DI0, DI2 und DO0 anschließen. DI1, DI3 undDO1 können dann nicht mehr verwendet werden
05784AXX
DIO DI2 DO0
DI3 DO1DI1
24 V(V024)
24 V(V024)
GND GND GND2
GND GND GND2
DI1 DI3 DO1
24 V(V024)
24 V(V024)
DI2 DO0
DI3 DO1
DI0
DI1
1 4 5 3 2
Achtung: Nicht benutzte Anschlüsse müssen mit M12-Verschlusskappen ver-sehen werden, um die Schutzart IP65 zu gewährleisten!
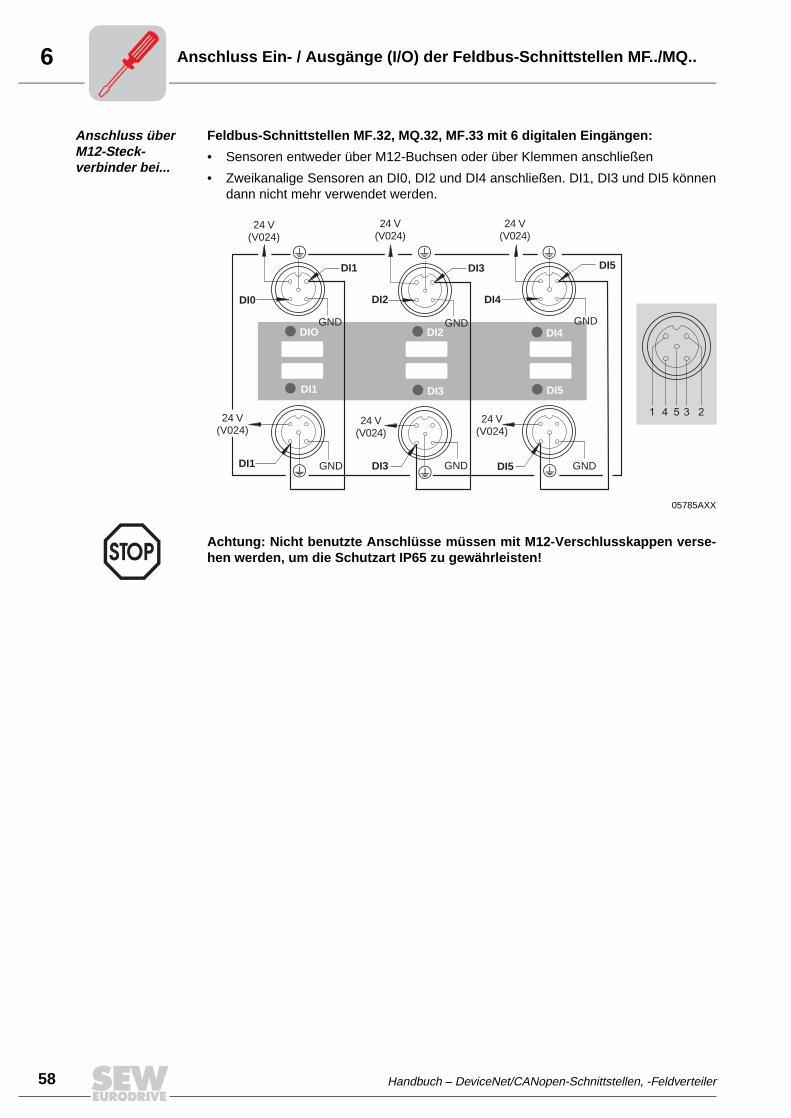
6
58 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss Ein- / Ausgänge (I/O) der Feldbus-Schnittstellen MF../MQ..
Anschluss über M12-Steck-verbinder bei...
Feldbus-Schnittstellen MF.32, MQ.32, MF.33 mit 6 digitalen Eingängen:
• Sensoren entweder über M12-Buchsen oder über Klemmen anschließen
• Zweikanalige Sensoren an DI0, DI2 und DI4 anschließen. DI1, DI3 und DI5 könnendann nicht mehr verwendet werden.
05785AXX
DIO DI2 DI4
DI3 DI5DI1
24 V(V024)
24 V(V024)
24 V(V024)
GND GND GND
GND GND GND
DI1 DI3 DI5
24 V(V024)
24 V(V024)
DI2 DI4
DI3 DI5
DI0
DI1
24 V(V024)
1 4 5 3 2
Achtung: Nicht benutzte Anschlüsse müssen mit M12-Verschlusskappen verse-hen werden, um die Schutzart IP65 zu gewährleisten!
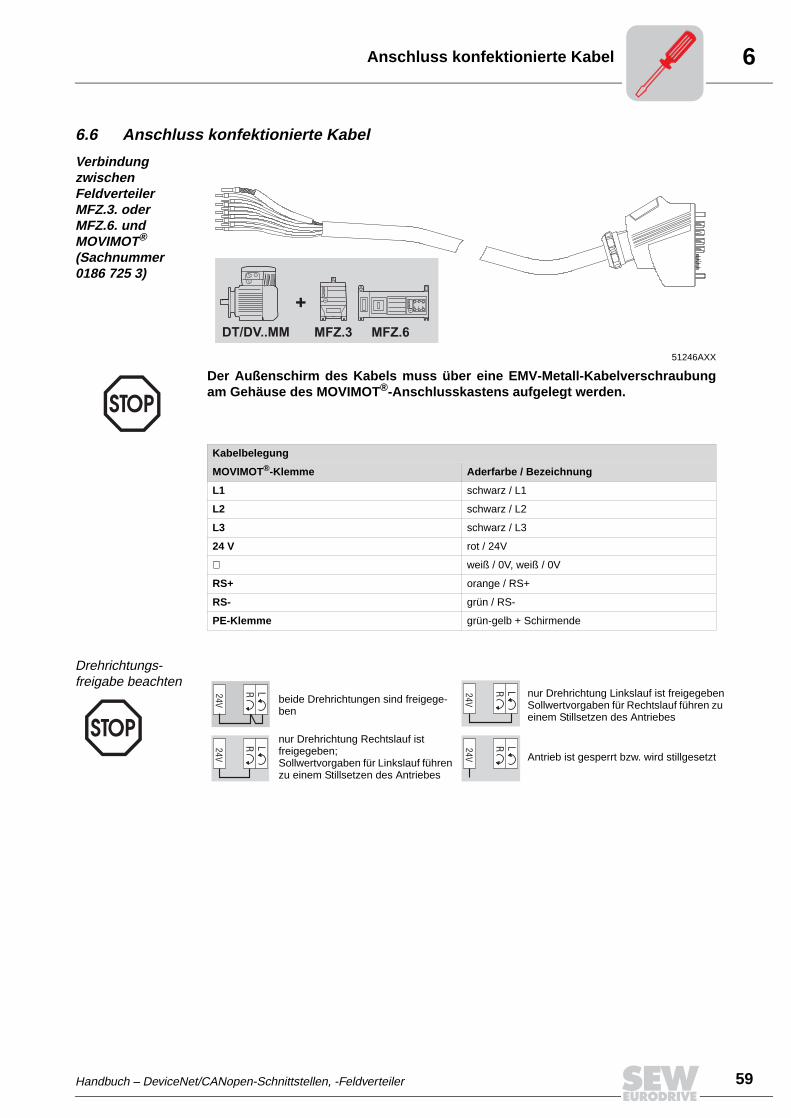
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 59
6Anschluss konfektionierte Kabel
6.6 Anschluss konfektionierte Kabel
Verbindung zwischen Feldverteiler MFZ.3. oder MFZ.6. und MOVIMOT® (Sachnummer 0186 725 3)
Drehrichtungs-freigabe beachten
51246AXX
DT/DV..MM MFZ.6
+
MFZ.3
Der Außenschirm des Kabels muss über eine EMV-Metall-Kabelverschraubungam Gehäuse des MOVIMOT®-Anschlusskastens aufgelegt werden.
Kabelbelegung
MOVIMOT®-Klemme Aderfarbe / Bezeichnung
L1 schwarz / L1
L2 schwarz / L2
L3 schwarz / L3
24 V rot / 24V
⊥ weiß / 0V, weiß / 0V
RS+ orange / RS+
RS- grün / RS-
PE-Klemme grün-gelb + Schirmende
beide Drehrichtungen sind freigege-ben
nur Drehrichtung Linkslauf ist freigegebenSollwertvorgaben für Rechtslauf führen zu einem Stillsetzen des Antriebes
nur Drehrichtung Rechtslauf ist freigegeben;Sollwertvorgaben für Linkslauf führen zu einem Stillsetzen des Antriebes
Antrieb ist gesperrt bzw. wird stillgesetzt
24V
LR LR24V
LR24V
LR24V
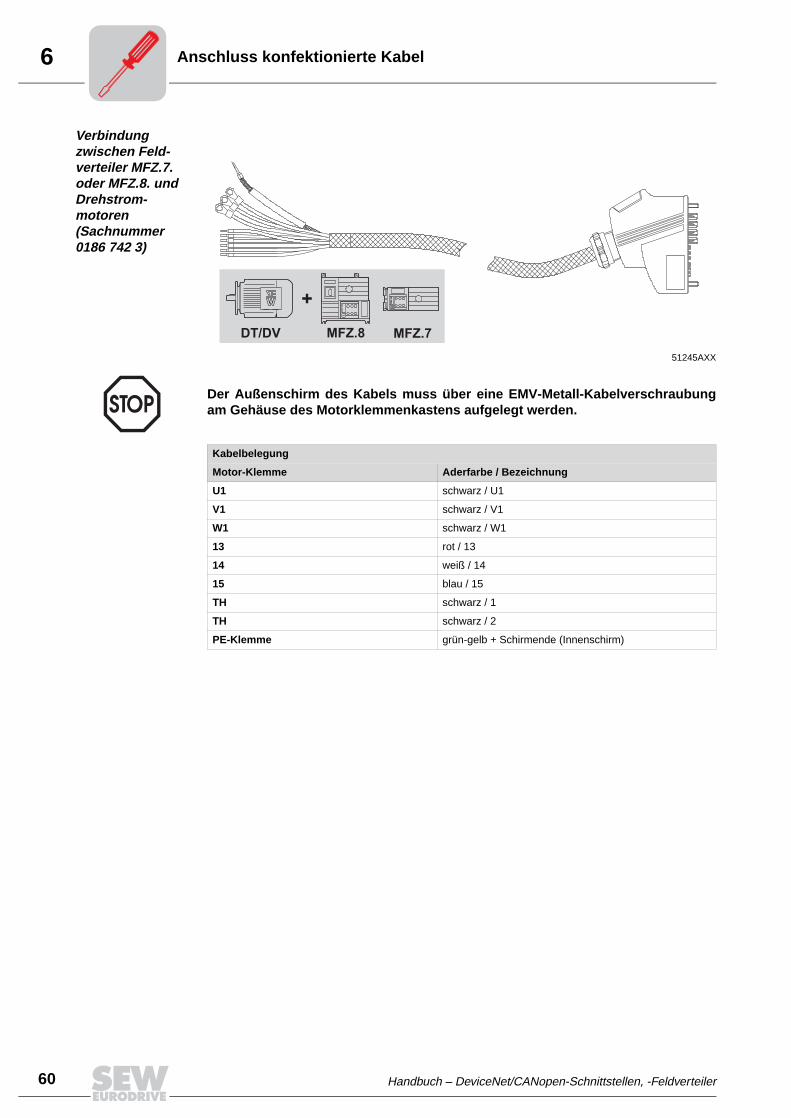
6
60 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Anschluss konfektionierte Kabel
Verbindung zwischen Feld-verteiler MFZ.7. oder MFZ.8. und Drehstrom-motoren (Sachnummer 0186 742 3)
51245AXX
DT/DV MFZ.7
+
MFZ.8
Der Außenschirm des Kabels muss über eine EMV-Metall-Kabelverschraubungam Gehäuse des Motorklemmenkastens aufgelegt werden.
Kabelbelegung
Motor-Klemme Aderfarbe / Bezeichnung
U1 schwarz / U1
V1 schwarz / V1
W1 schwarz / W1
13 rot / 13
14 weiß / 14
15 blau / 15
TH schwarz / 1
TH schwarz / 2
PE-Klemme grün-gelb + Schirmende (Innenschirm)
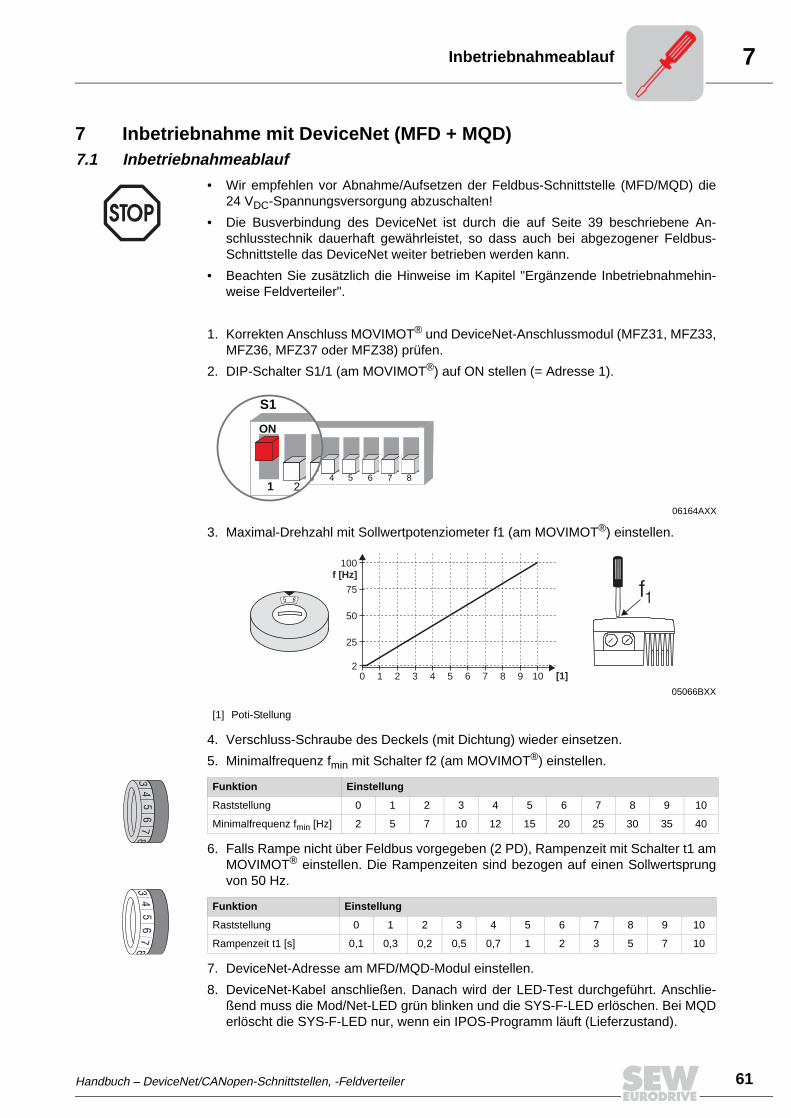
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 61
7Inbetriebnahmeablauf
7 Inbetriebnahme mit DeviceNet (MFD + MQD)7.1 Inbetriebnahmeablauf
1. Korrekten Anschluss MOVIMOT® und DeviceNet-Anschlussmodul (MFZ31, MFZ33,MFZ36, MFZ37 oder MFZ38) prüfen.
2. DIP-Schalter S1/1 (am MOVIMOT®) auf ON stellen (= Adresse 1).
3. Maximal-Drehzahl mit Sollwertpotenziometer f1 (am MOVIMOT®) einstellen.
4. Verschluss-Schraube des Deckels (mit Dichtung) wieder einsetzen.
5. Minimalfrequenz fmin mit Schalter f2 (am MOVIMOT®) einstellen.
6. Falls Rampe nicht über Feldbus vorgegeben (2 PD), Rampenzeit mit Schalter t1 amMOVIMOT® einstellen. Die Rampenzeiten sind bezogen auf einen Sollwertsprungvon 50 Hz.
7. DeviceNet-Adresse am MFD/MQD-Modul einstellen.
8. DeviceNet-Kabel anschließen. Danach wird der LED-Test durchgeführt. Anschlie-ßend muss die Mod/Net-LED grün blinken und die SYS-F-LED erlöschen. Bei MQDerlöscht die SYS-F-LED nur, wenn ein IPOS-Programm läuft (Lieferzustand).
• Wir empfehlen vor Abnahme/Aufsetzen der Feldbus-Schnittstelle (MFD/MQD) die24 VDC-Spannungsversorgung abzuschalten!
• Die Busverbindung des DeviceNet ist durch die auf Seite 39 beschriebene An-schlusstechnik dauerhaft gewährleistet, so dass auch bei abgezogener Feldbus-Schnittstelle das DeviceNet weiter betrieben werden kann.
• Beachten Sie zusätzlich die Hinweise im Kapitel "Ergänzende Inbetriebnahmehin-weise Feldverteiler".
06164AXX
05066BXX
[1] Poti-Stellung
Funktion Einstellung
Raststellung 0 1 2 3 4 5 6 7 8 9 10
Minimalfrequenz fmin [Hz] 2 5 7 10 12 15 20 25 30 35 40
Funktion Einstellung
Raststellung 0 1 2 3 4 5 6 7 8 9 10
Rampenzeit t1 [s] 0,1 0,3 0,2 0,5 0,7 1 2 3 5 7 10
1
ON
S1
6 7 854321
ON
S1
32
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
34
56
78
34
56
78
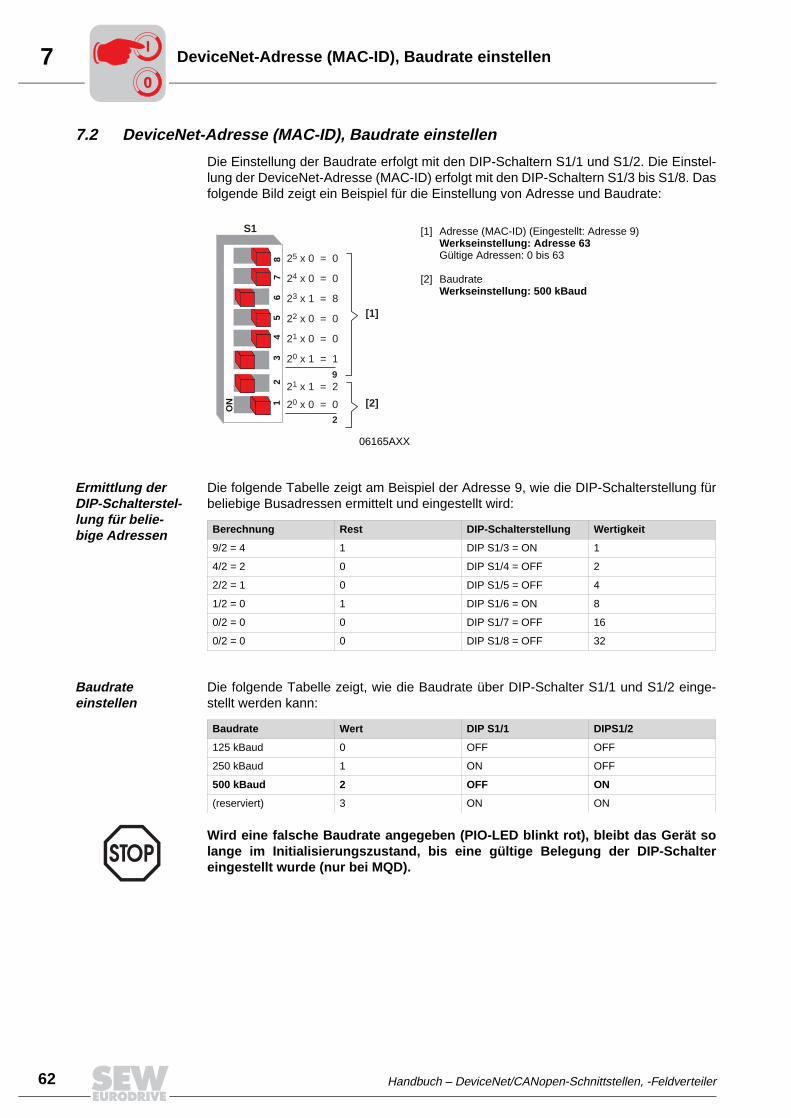
7
62 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
DeviceNet-Adresse (MAC-ID), Baudrate einstellen
7.2 DeviceNet-Adresse (MAC-ID), Baudrate einstellen
Die Einstellung der Baudrate erfolgt mit den DIP-Schaltern S1/1 und S1/2. Die Einstel-lung der DeviceNet-Adresse (MAC-ID) erfolgt mit den DIP-Schaltern S1/3 bis S1/8. Dasfolgende Bild zeigt ein Beispiel für die Einstellung von Adresse und Baudrate:
Ermittlung der DIP-Schalterstel-lung für belie-bige Adressen
Die folgende Tabelle zeigt am Beispiel der Adresse 9, wie die DIP-Schalterstellung fürbeliebige Busadressen ermittelt und eingestellt wird:
Baudrate einstellen
Die folgende Tabelle zeigt, wie die Baudrate über DIP-Schalter S1/1 und S1/2 einge-stellt werden kann:
06165AXX
[1] Adresse (MAC-ID) (Eingestellt: Adresse 9) Werkseinstellung: Adresse 63Gültige Adressen: 0 bis 63
[2] Baudrate Werkseinstellung: 500 kBaud
1
ON
67
54
32
8
S1
[1]
2 x 0 = 0
2 x 0 = 0
5
4
2 x 1 = 8
2 x 0 = 0
2 x 0 = 0
2 x 1 = 1
3
2
1
0
2 x 1 = 2
2 x 0 = 0
1
0
9
2
[2]
Berechnung Rest DIP-Schalterstellung Wertigkeit
9/2 = 4 1 DIP S1/3 = ON 1
4/2 = 2 0 DIP S1/4 = OFF 2
2/2 = 1 0 DIP S1/5 = OFF 4
1/2 = 0 1 DIP S1/6 = ON 8
0/2 = 0 0 DIP S1/7 = OFF 16
0/2 = 0 0 DIP S1/8 = OFF 32
Baudrate Wert DIP S1/1 DIPS1/2
125 kBaud 0 OFF OFF
250 kBaud 1 ON OFF
500 kBaud 2 OFF ON
(reserviert) 3 ON ON
Wird eine falsche Baudrate angegeben (PIO-LED blinkt rot), bleibt das Gerät solange im Initialisierungszustand, bis eine gültige Belegung der DIP-Schaltereingestellt wurde (nur bei MQD).
00
I
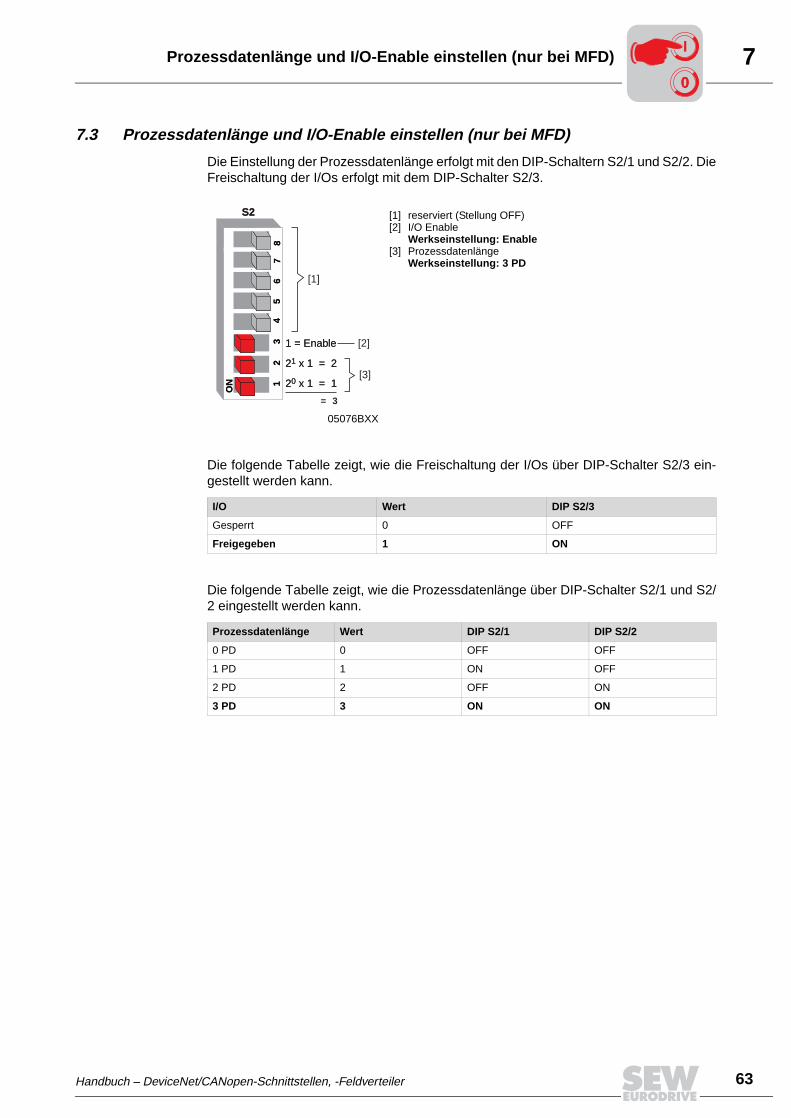
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 63
7Prozessdatenlänge und I/O-Enable einstellen (nur bei MFD)
7.3 Prozessdatenlänge und I/O-Enable einstellen (nur bei MFD)
Die Einstellung der Prozessdatenlänge erfolgt mit den DIP-Schaltern S2/1 und S2/2. DieFreischaltung der I/Os erfolgt mit dem DIP-Schalter S2/3.
Die folgende Tabelle zeigt, wie die Freischaltung der I/Os über DIP-Schalter S2/3 ein-gestellt werden kann.
Die folgende Tabelle zeigt, wie die Prozessdatenlänge über DIP-Schalter S2/1 und S2/2 eingestellt werden kann.
05076BXX
[1] reserviert (Stellung OFF)[2] I/O Enable
Werkseinstellung: Enable[3] Prozessdatenlänge
Werkseinstellung: 3 PD
I/O Wert DIP S2/3
Gesperrt 0 OFF
Freigegeben 1 ON
Prozessdatenlänge Wert DIP S2/1 DIP S2/2
0 PD 0 OFF OFF
1 PD 1 ON OFF
2 PD 2 OFF ON
3 PD 3 ON ON
[1]
[3]
[2]
1
ON
67
54
32
8
S2
1 = Enable
2 x 1 = 2
2 x 1 = 1
1
01
ON
67
54
32
8
S2
1 = Enable
2 x 1 = 2
2 x 1 = 1
1
0
= 3
00
I
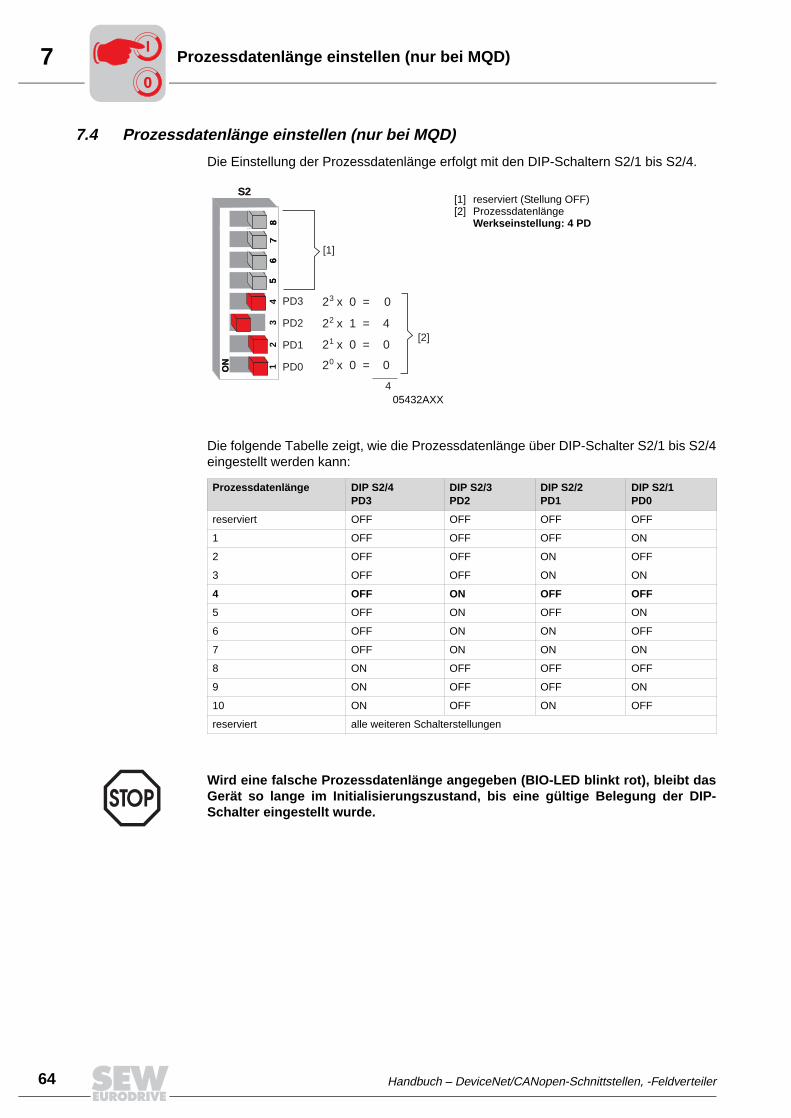
7
64 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Prozessdatenlänge einstellen (nur bei MQD)
7.4 Prozessdatenlänge einstellen (nur bei MQD)
Die Einstellung der Prozessdatenlänge erfolgt mit den DIP-Schaltern S2/1 bis S2/4.
Die folgende Tabelle zeigt, wie die Prozessdatenlänge über DIP-Schalter S2/1 bis S2/4eingestellt werden kann:
05432AXX
[1] reserviert (Stellung OFF)[2] Prozessdatenlänge
Werkseinstellung: 4 PD
Prozessdatenlänge DIP S2/4PD3
DIP S2/3PD2
DIP S2/2PD1
DIP S2/1PD0
reserviert OFF OFF OFF OFF
1 OFF OFF OFF ON
2 OFF OFF ON OFF
3 OFF OFF ON ON
4 OFF ON OFF OFF
5 OFF ON OFF ON
6 OFF ON ON OFF
7 OFF ON ON ON
8 ON OFF OFF OFF
9 ON OFF OFF ON
10 ON OFF ON OFF
reserviert alle weiteren Schalterstellungen
[1]
PD3
PD2
PD1
PD01ON
67
54
32
8
S2
ON
67
58
S2
[2]
2 x 0 = 03
2 x 1 = 42
2 x 0 = 01
2 x 0 = 00
4
Wird eine falsche Prozessdatenlänge angegeben (BIO-LED blinkt rot), bleibt dasGerät so lange im Initialisierungszustand, bis eine gültige Belegung der DIP-Schalter eingestellt wurde.
00
I
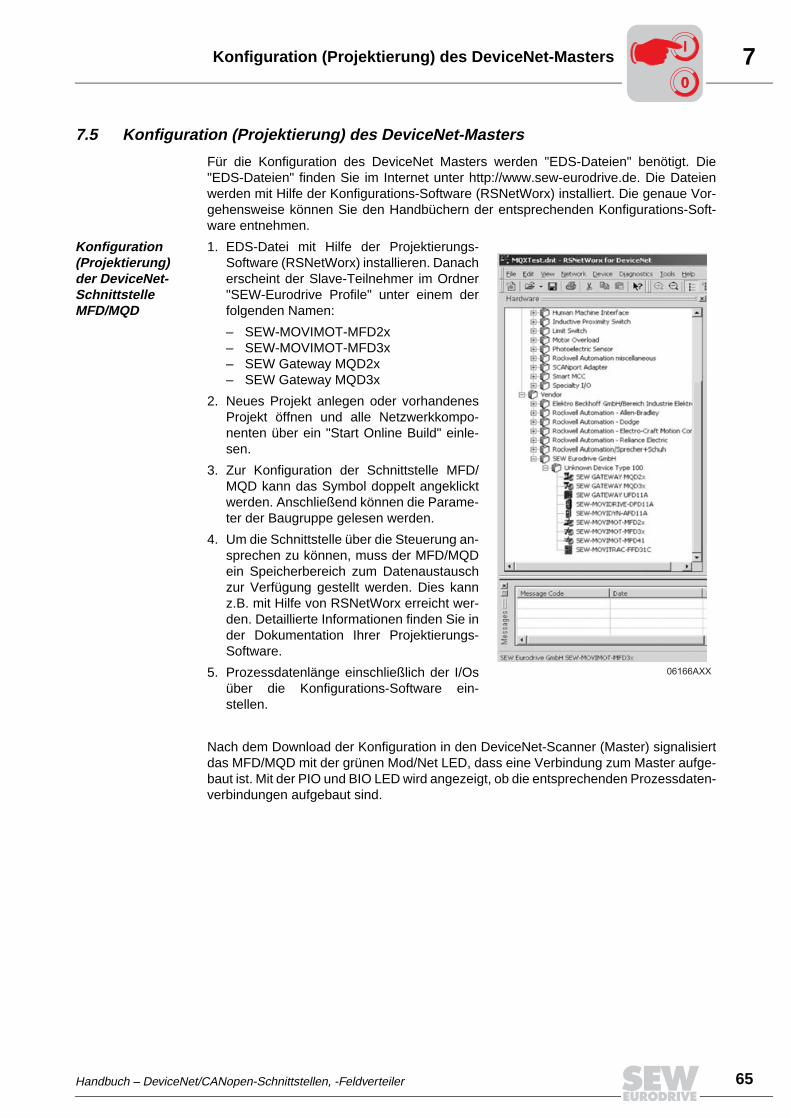
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 65
7Konfiguration (Projektierung) des DeviceNet-Masters
7.5 Konfiguration (Projektierung) des DeviceNet-Masters
Für die Konfiguration des DeviceNet Masters werden "EDS-Dateien" benötigt. Die"EDS-Dateien" finden Sie im Internet unter http://www.sew-eurodrive.de. Die Dateienwerden mit Hilfe der Konfigurations-Software (RSNetWorx) installiert. Die genaue Vor-gehensweise können Sie den Handbüchern der entsprechenden Konfigurations-Soft-ware entnehmen.
Konfiguration (Projektierung) der DeviceNet-Schnittstelle MFD/MQD
1. EDS-Datei mit Hilfe der Projektierungs-Software (RSNetWorx) installieren. Danacherscheint der Slave-Teilnehmer im Ordner"SEW-Eurodrive Profile" unter einem derfolgenden Namen:
– SEW-MOVIMOT-MFD2x– SEW-MOVIMOT-MFD3x– SEW Gateway MQD2x– SEW Gateway MQD3x
2. Neues Projekt anlegen oder vorhandenesProjekt öffnen und alle Netzwerkkompo-nenten über ein "Start Online Build" einle-sen.
3. Zur Konfiguration der Schnittstelle MFD/MQD kann das Symbol doppelt angeklicktwerden. Anschließend können die Parame-ter der Baugruppe gelesen werden.
4. Um die Schnittstelle über die Steuerung an-sprechen zu können, muss der MFD/MQDein Speicherbereich zum Datenaustauschzur Verfügung gestellt werden. Dies kannz.B. mit Hilfe von RSNetWorx erreicht wer-den. Detaillierte Informationen finden Sie inder Dokumentation Ihrer Projektierungs-Software.
5. Prozessdatenlänge einschließlich der I/Osüber die Konfigurations-Software ein-stellen.
Nach dem Download der Konfiguration in den DeviceNet-Scanner (Master) signalisiertdas MFD/MQD mit der grünen Mod/Net LED, dass eine Verbindung zum Master aufge-baut ist. Mit der PIO und BIO LED wird angezeigt, ob die entsprechenden Prozessdaten-verbindungen aufgebaut sind.
06166AXX
00
I
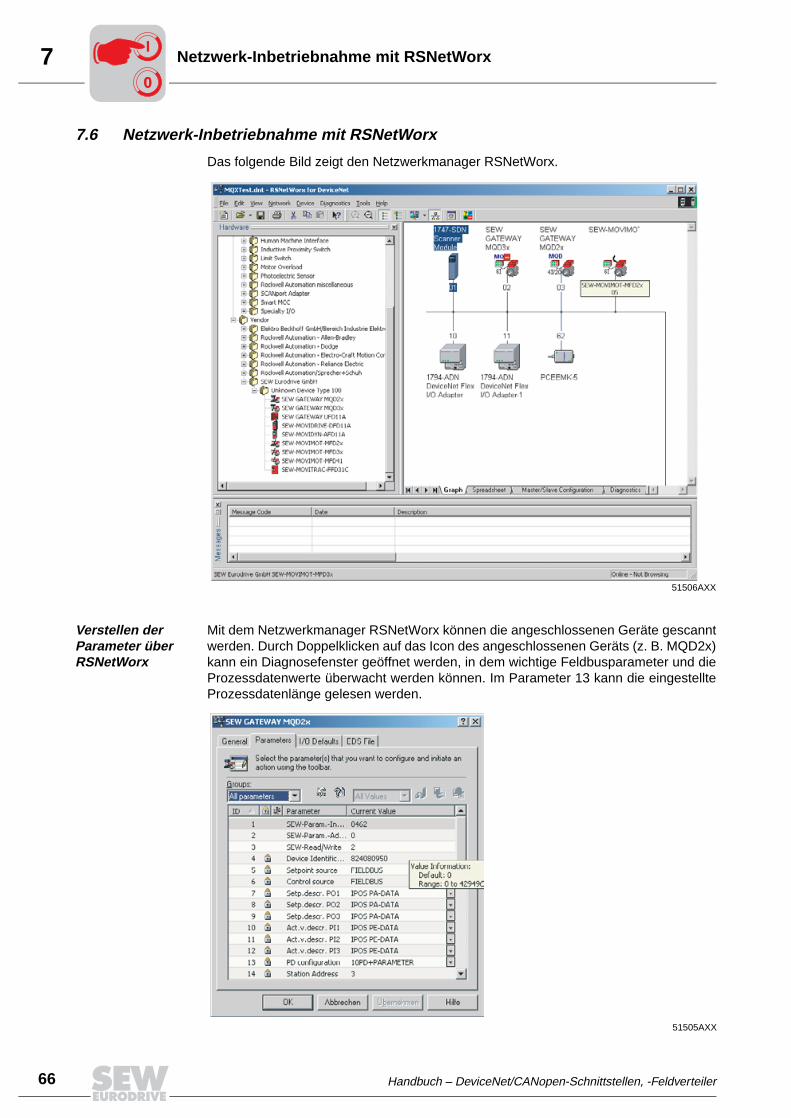
7
66 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Netzwerk-Inbetriebnahme mit RSNetWorx
7.6 Netzwerk-Inbetriebnahme mit RSNetWorx
Das folgende Bild zeigt den Netzwerkmanager RSNetWorx.
Verstellen der Parameter über RSNetWorx
Mit dem Netzwerkmanager RSNetWorx können die angeschlossenen Geräte gescanntwerden. Durch Doppelklicken auf das Icon des angeschlossenen Geräts (z. B. MQD2x)kann ein Diagnosefenster geöffnet werden, in dem wichtige Feldbusparameter und dieProzessdatenwerte überwacht werden können. Im Parameter 13 kann die eingestellteProzessdatenlänge gelesen werden.
51506AXX
51505AXX
00
I

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 67
7Netzwerk-Inbetriebnahme mit RSNetWorx
Scanner in Betrieb nehmen
Als nächstes muss der Scanner in Betrieb genommen und die Scanliste (siehe folgen-des Bild) erzeugt werden. Öffnen Sie das Inbetriebnahmefenster, indem Sie auf denScanner doppelklicken.
Im Register Scanlist müssen Sie die SEW-Feldbus-Schnittstelle (z. B. SEW GatewayMQD2x) in die Scanliste aufnehmen.
Doppelklicken Sie das Gerät in der Scanliste, dessen PD-Länge Sie einstellen wollen.Es öffnet sich das I/O-Parameter Fenster. Stellen Sie für die Polled-I/O- und Bit-StrobeI/O-Verbindung die Prozessdatenlänge ein. Beachten Sie dass hier die PD-Länge inByte angegeben wird. Deshalb muss die PD-Länge des Gerätes mit 2 multipliziert wer-den. Beispiel: Bei 10 PD muss 20 Byte eingestellt werden.
05442AXX
51507AXX
00
I
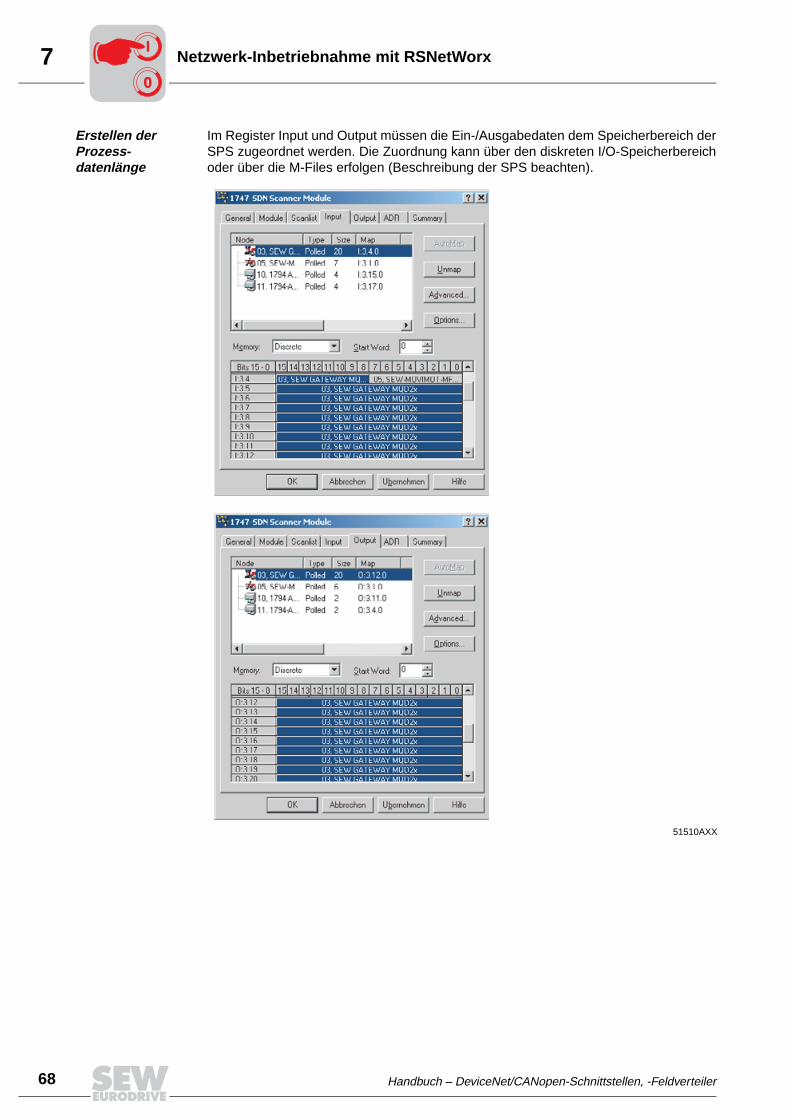
7
68 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Netzwerk-Inbetriebnahme mit RSNetWorx
Erstellen der Prozess-datenlänge
Im Register Input und Output müssen die Ein-/Ausgabedaten dem Speicherbereich derSPS zugeordnet werden. Die Zuordnung kann über den diskreten I/O-Speicherbereichoder über die M-Files erfolgen (Beschreibung der SPS beachten).
51510AXX
00
I
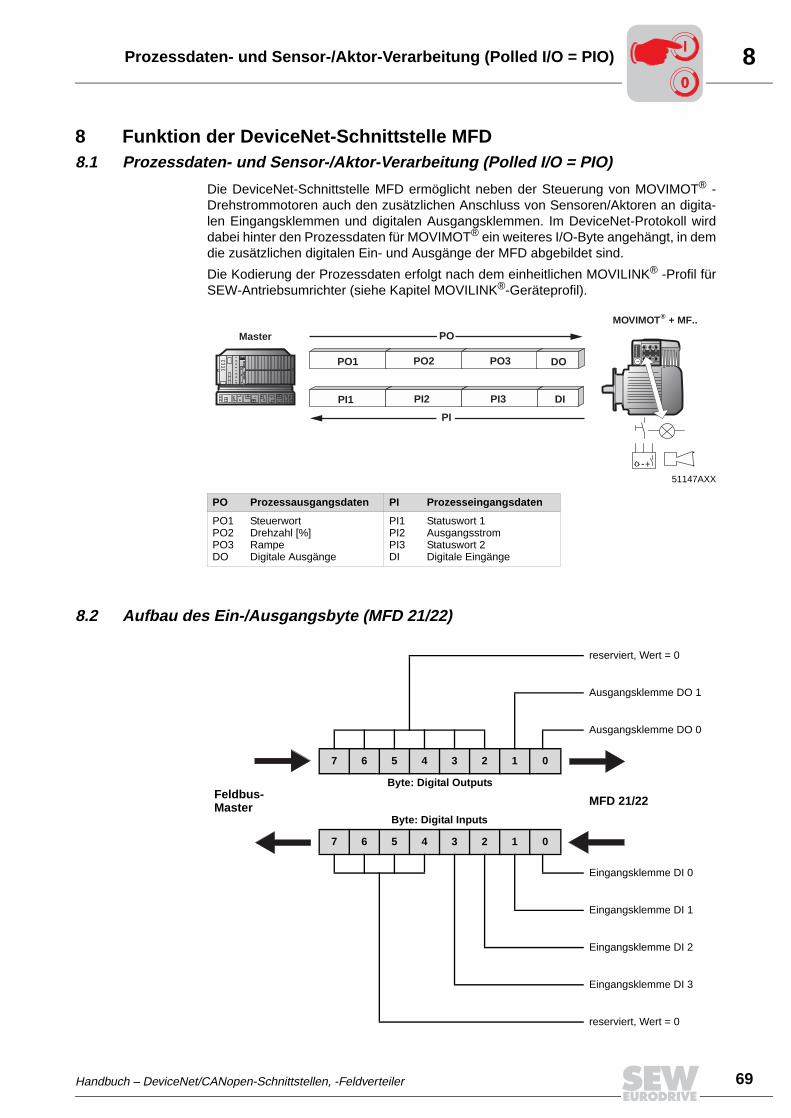
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 69
8Prozessdaten- und Sensor-/Aktor-Verarbeitung (Polled I/O = PIO)
8 Funktion der DeviceNet-Schnittstelle MFD8.1 Prozessdaten- und Sensor-/Aktor-Verarbeitung (Polled I/O = PIO)
Die DeviceNet-Schnittstelle MFD ermöglicht neben der Steuerung von MOVIMOT® -Drehstrommotoren auch den zusätzlichen Anschluss von Sensoren/Aktoren an digita-len Eingangsklemmen und digitalen Ausgangsklemmen. Im DeviceNet-Protokoll wirddabei hinter den Prozessdaten für MOVIMOT® ein weiteres I/O-Byte angehängt, in demdie zusätzlichen digitalen Ein- und Ausgänge der MFD abgebildet sind.
Die Kodierung der Prozessdaten erfolgt nach dem einheitlichen MOVILINK® -Profil fürSEW-Antriebsumrichter (siehe Kapitel MOVILINK®-Geräteprofil).
8.2 Aufbau des Ein-/Ausgangsbyte (MFD 21/22)
51147AXX
PO Prozessausgangsdaten PI Prozesseingangsdaten
PO1 Steuerwort PO2 Drehzahl [%]PO3 RampeDO Digitale Ausgänge
PI1 Statuswort 1PI2 AusgangsstromPI3 Statuswort 2DI Digitale Eingänge
MOVIMOT + MF..®
PO1 PO2 PO3
Master
PI1 PI2 PI3
PO
PI
DO
DI
-+
reserviert, Wert = 0
Ausgangsklemme DO 1
Ausgangsklemme DO 0
7 6 5 4 3 2 1 0
Feldbus-Master
Byte: Digital Outputs
MFD 21/22
Byte: Digital Inputs
7 6 5 4 3 2 1 0
Eingangsklemme DI 0
Eingangsklemme DI 1
Eingangsklemme DI 2
Eingangsklemme DI 3
reserviert, Wert = 0
00
I
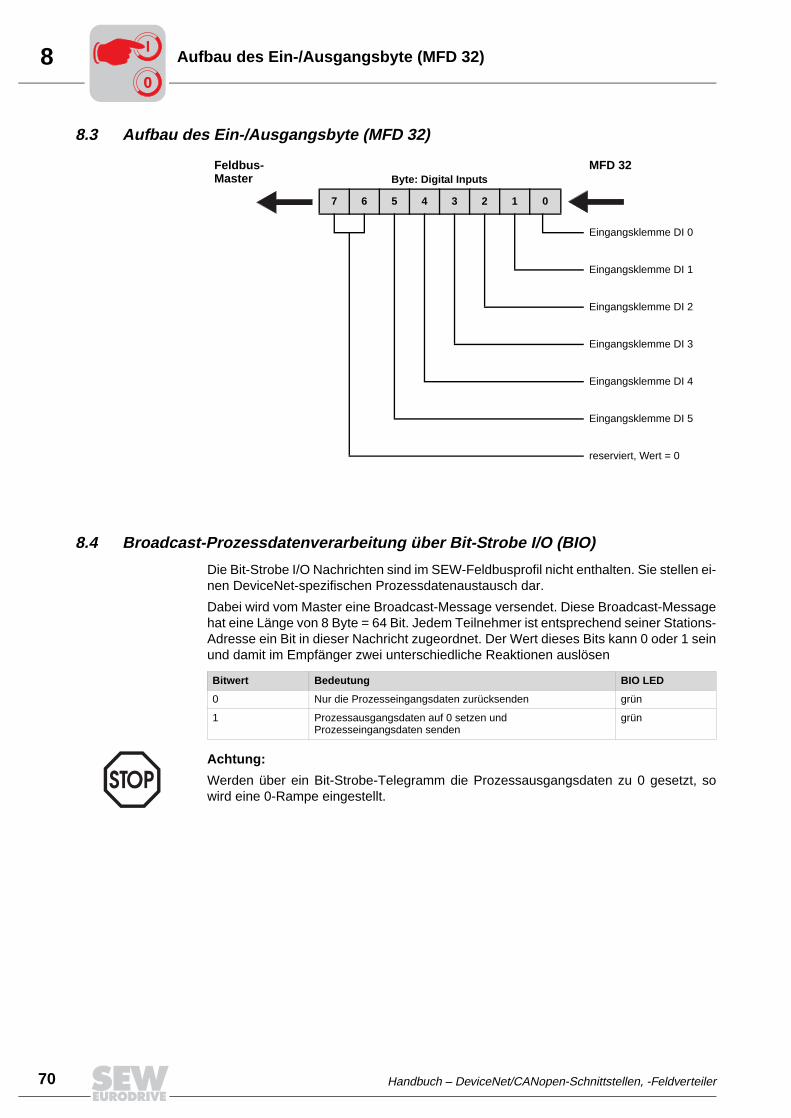
8
70 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Aufbau des Ein-/Ausgangsbyte (MFD 32)
8.3 Aufbau des Ein-/Ausgangsbyte (MFD 32)
8.4 Broadcast-Prozessdatenverarbeitung über Bit-Strobe I/O (BIO)
Die Bit-Strobe I/O Nachrichten sind im SEW-Feldbusprofil nicht enthalten. Sie stellen ei-nen DeviceNet-spezifischen Prozessdatenaustausch dar.
Dabei wird vom Master eine Broadcast-Message versendet. Diese Broadcast-Messagehat eine Länge von 8 Byte = 64 Bit. Jedem Teilnehmer ist entsprechend seiner Stations-Adresse ein Bit in dieser Nachricht zugeordnet. Der Wert dieses Bits kann 0 oder 1 seinund damit im Empfänger zwei unterschiedliche Reaktionen auslösen
Feldbus-Master Byte: Digital Inputs
MFD 32
7 6 5 4 3 2 1 0
Eingangsklemme DI 0
Eingangsklemme DI 1
Eingangsklemme DI 2
Eingangsklemme DI 3
Eingangsklemme DI 4
Eingangsklemme DI 5
reserviert, Wert = 0
Bitwert Bedeutung BIO LED
0 Nur die Prozesseingangsdaten zurücksenden grün
1 Prozessausgangsdaten auf 0 setzen undProzesseingangsdaten senden
grün
Achtung:
Werden über ein Bit-Strobe-Telegramm die Prozessausgangsdaten zu 0 gesetzt, sowird eine 0-Rampe eingestellt.
00
I
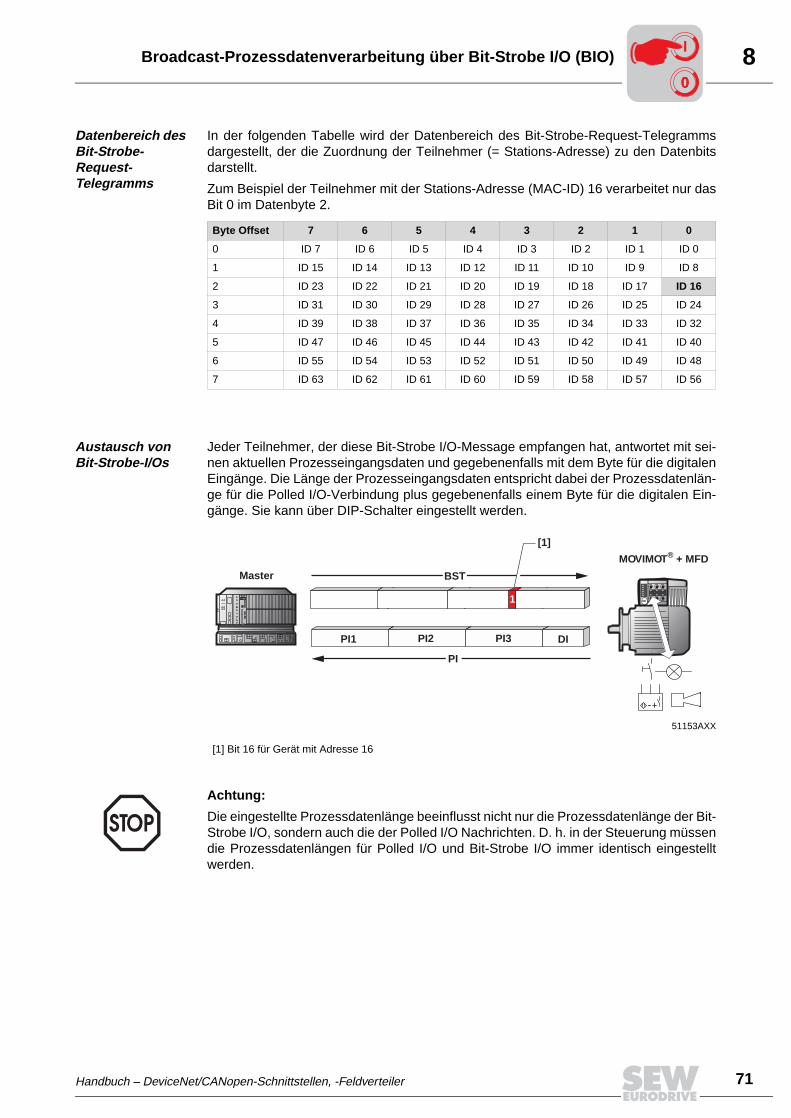
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 71
8Broadcast-Prozessdatenverarbeitung über Bit-Strobe I/O (BIO)
Datenbereich des Bit-Strobe-Request-Telegramms
In der folgenden Tabelle wird der Datenbereich des Bit-Strobe-Request-Telegrammsdargestellt, der die Zuordnung der Teilnehmer (= Stations-Adresse) zu den Datenbitsdarstellt.
Zum Beispiel der Teilnehmer mit der Stations-Adresse (MAC-ID) 16 verarbeitet nur dasBit 0 im Datenbyte 2.
Austausch von Bit-Strobe-I/Os
Jeder Teilnehmer, der diese Bit-Strobe I/O-Message empfangen hat, antwortet mit sei-nen aktuellen Prozesseingangsdaten und gegebenenfalls mit dem Byte für die digitalenEingänge. Die Länge der Prozesseingangsdaten entspricht dabei der Prozessdatenlän-ge für die Polled I/O-Verbindung plus gegebenenfalls einem Byte für die digitalen Ein-gänge. Sie kann über DIP-Schalter eingestellt werden.
Byte Offset 7 6 5 4 3 2 1 0
0 ID 7 ID 6 ID 5 ID 4 ID 3 ID 2 ID 1 ID 0
1 ID 15 ID 14 ID 13 ID 12 ID 11 ID 10 ID 9 ID 8
2 ID 23 ID 22 ID 21 ID 20 ID 19 ID 18 ID 17 ID 16
3 ID 31 ID 30 ID 29 ID 28 ID 27 ID 26 ID 25 ID 24
4 ID 39 ID 38 ID 37 ID 36 ID 35 ID 34 ID 33 ID 32
5 ID 47 ID 46 ID 45 ID 44 ID 43 ID 42 ID 41 ID 40
6 ID 55 ID 54 ID 53 ID 52 ID 51 ID 50 ID 49 ID 48
7 ID 63 ID 62 ID 61 ID 60 ID 59 ID 58 ID 57 ID 56
51153AXX
[1] Bit 16 für Gerät mit Adresse 16
MOVIMOT + MFD®
Master
PI1 PI2 PI3
BST
PI
DI
-+
1
[1]
Achtung:
Die eingestellte Prozessdatenlänge beeinflusst nicht nur die Prozessdatenlänge der Bit-Strobe I/O, sondern auch die der Polled I/O Nachrichten. D. h. in der Steuerung müssendie Prozessdatenlängen für Polled I/O und Bit-Strobe I/O immer identisch eingestelltwerden.
00
I
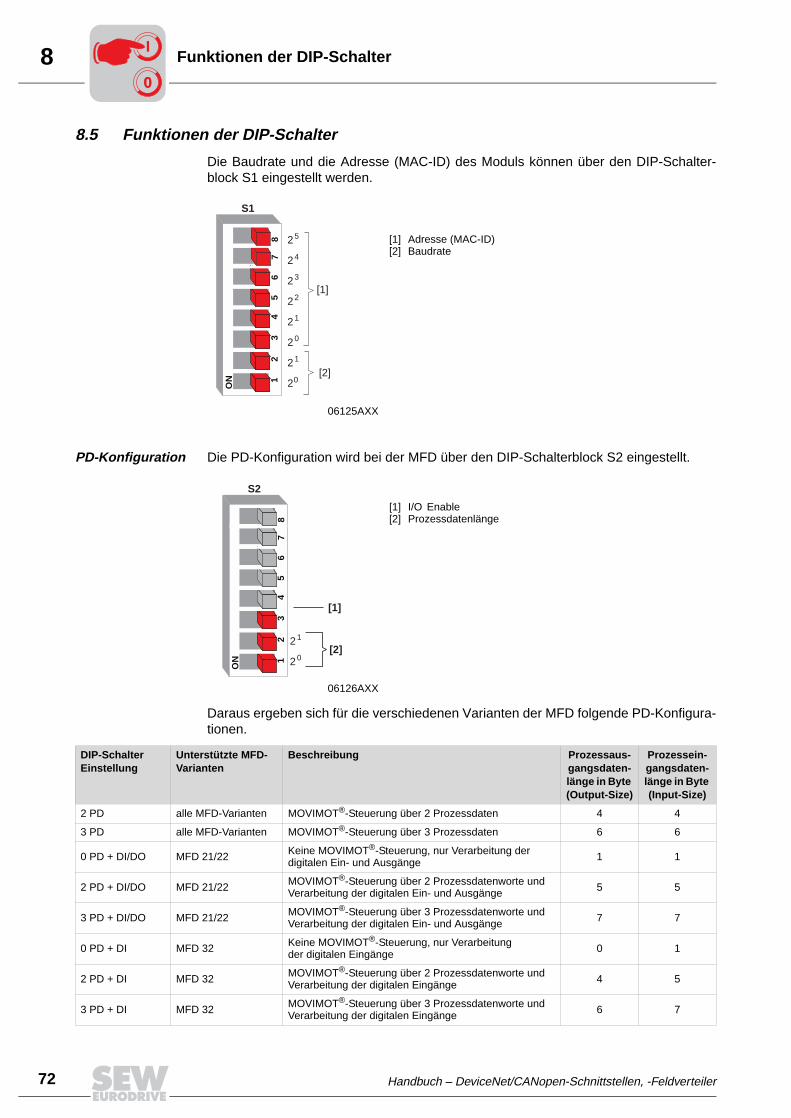
8
72 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Funktionen der DIP-Schalter
8.5 Funktionen der DIP-Schalter
Die Baudrate und die Adresse (MAC-ID) des Moduls können über den DIP-Schalter-block S1 eingestellt werden.
PD-Konfiguration Die PD-Konfiguration wird bei der MFD über den DIP-Schalterblock S2 eingestellt.
Daraus ergeben sich für die verschiedenen Varianten der MFD folgende PD-Konfigura-tionen.
06125AXX
[1] Adresse (MAC-ID)[2] Baudrate
[1]
[2]
1
ON
67
54
32
8
S1
2
2
2
2
2
2
2
2
5
4
3
2
1
0
1
0
06126AXX
[1] I/O Enable[2] Prozessdatenlänge
1
ON
67
54
32
8
S2
2
2
1
0
[1]
[2]
DIP-Schalter Einstellung
Unterstützte MFD-Varianten
Beschreibung Prozessaus-gangsdaten-länge in Byte (Output-Size)
Prozessein-gangsdaten-länge in Byte (Input-Size)
2 PD alle MFD-Varianten MOVIMOT®-Steuerung über 2 Prozessdaten 4 4
3 PD alle MFD-Varianten MOVIMOT®-Steuerung über 3 Prozessdaten 6 6
0 PD + DI/DO MFD 21/22 Keine MOVIMOT®-Steuerung, nur Verarbeitung derdigitalen Ein- und Ausgänge 1 1
2 PD + DI/DO MFD 21/22 MOVIMOT®-Steuerung über 2 Prozessdatenworte undVerarbeitung der digitalen Ein- und Ausgänge 5 5
3 PD + DI/DO MFD 21/22 MOVIMOT®-Steuerung über 3 Prozessdatenworte undVerarbeitung der digitalen Ein- und Ausgänge 7 7
0 PD + DI MFD 32 Keine MOVIMOT®-Steuerung, nur Verarbeitungder digitalen Eingänge 0 1
2 PD + DI MFD 32 MOVIMOT®-Steuerung über 2 Prozessdatenworte undVerarbeitung der digitalen Eingänge 4 5
3 PD + DI MFD 32 MOVIMOT®-Steuerung über 3 Prozessdatenworte undVerarbeitung der digitalen Eingänge 6 7
00
I
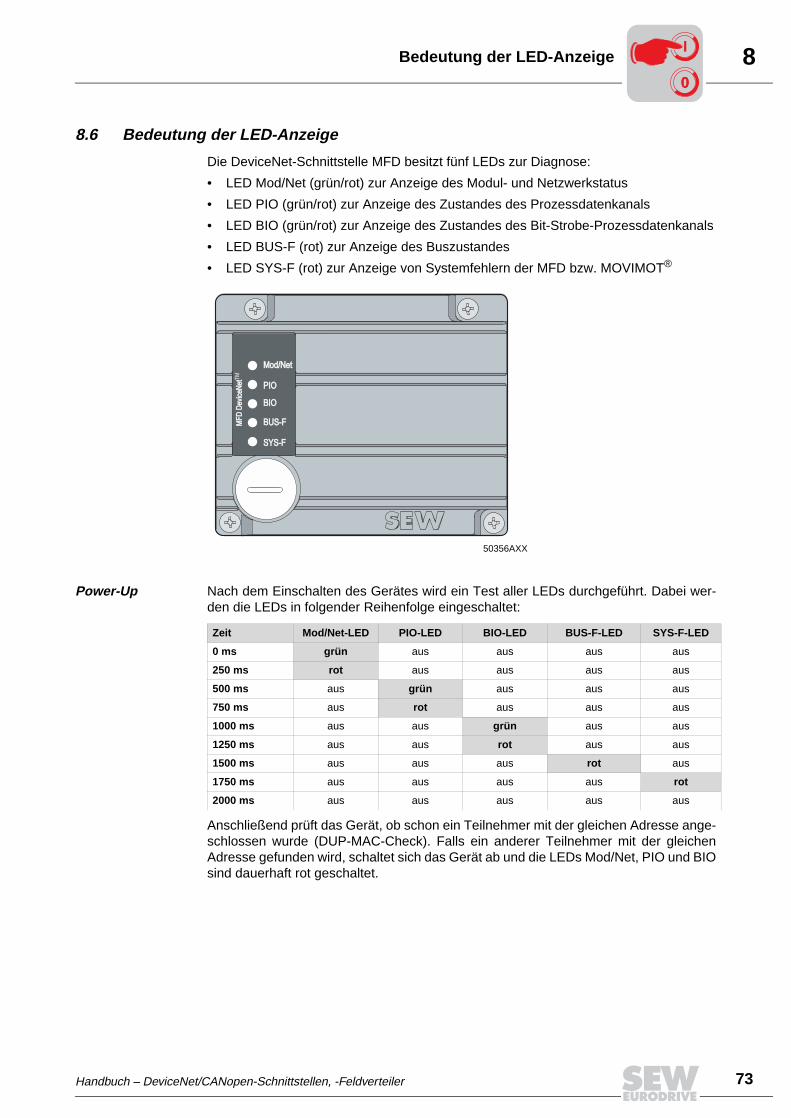
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 73
8Bedeutung der LED-Anzeige
8.6 Bedeutung der LED-Anzeige
Die DeviceNet-Schnittstelle MFD besitzt fünf LEDs zur Diagnose:
• LED Mod/Net (grün/rot) zur Anzeige des Modul- und Netzwerkstatus
• LED PIO (grün/rot) zur Anzeige des Zustandes des Prozessdatenkanals
• LED BIO (grün/rot) zur Anzeige des Zustandes des Bit-Strobe-Prozessdatenkanals
• LED BUS-F (rot) zur Anzeige des Buszustandes
• LED SYS-F (rot) zur Anzeige von Systemfehlern der MFD bzw. MOVIMOT®
Power-Up Nach dem Einschalten des Gerätes wird ein Test aller LEDs durchgeführt. Dabei wer-den die LEDs in folgender Reihenfolge eingeschaltet:
Anschließend prüft das Gerät, ob schon ein Teilnehmer mit der gleichen Adresse ange-schlossen wurde (DUP-MAC-Check). Falls ein anderer Teilnehmer mit der gleichenAdresse gefunden wird, schaltet sich das Gerät ab und die LEDs Mod/Net, PIO und BIOsind dauerhaft rot geschaltet.
50356AXX
MF
D D
evic
eNet
MF
D D
evic
eNet
TM
SYS-FSYS-F
BUS-FBUS-F
BIOBIO
PIOPIO
Mod/NetMod/Net
Zeit Mod/Net-LED PIO-LED BIO-LED BUS-F-LED SYS-F-LED
0 ms grün aus aus aus aus
250 ms rot aus aus aus aus
500 ms aus grün aus aus aus
750 ms aus rot aus aus aus
1000 ms aus aus grün aus aus
1250 ms aus aus rot aus aus
1500 ms aus aus aus rot aus
1750 ms aus aus aus aus rot
2000 ms aus aus aus aus aus
00
I
8
74 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Bedeutung der LED-Anzeige
Mod/Net-LED (grün/rot)
Die Funktionalität der Mod/Net-LED (Modul/Network-Status-LED) ist in der DeviceNet-Spezifikation festgelegt. In folgender Tabelle wird diese Funktionalität beschrieben:
Status LED Bedeutung Fehlerbehebung
Nicht eingeschal-tet/Offline
Aus • Gerät ist im offline-Zustand• Gerät führt DUP-MAC-Check
aus• Gerät ist ausgeschaltet
• Versorgungsspannung über DeviceNet-Stecker einschalten
Online und im Operational Mode
Blinkt Grün (1s-Takt)
• DUP-MAC-Check wurde erfolg-reich durchgeführt
• Es wurde noch keine Verbin-dung zu einem Master aufge-baut
• Fehlende, falsche oder nicht komplette Konfiguration
• Der Teilnehmer muss in die Scan-Liste des Master aufge-nommen und die Kommunika-tion im Master gestartet werden
Online, Operatio-nal Mode und Connected
Grün • online-Verbindung zu einem Master wurde aufgebaut
• Verbindung ist aktiv (Establis-hed State)
–
Minor Fault oder Connection Timeout
Blinkt Rot (1s-Takt)
• Polled I/O oder/und Bit-Strobe I/O-Connection sind im Time-outstate
• Es ist ein behebbarer Fehler im Gerät oder im Bussystem auf-getreten
• DeviceNet-Kabel prüfen• Timeoutreaktion überprüfen,
falls eine Reaktion mit Fehler eingestellt ist, so ist nach der Behebung des Fehlers ein Reset des Geräts durchzufüh-ren
Critical Fault oder Critical Link Failure
Rot • Es ist ein nicht behebbarer Fehler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
00
I
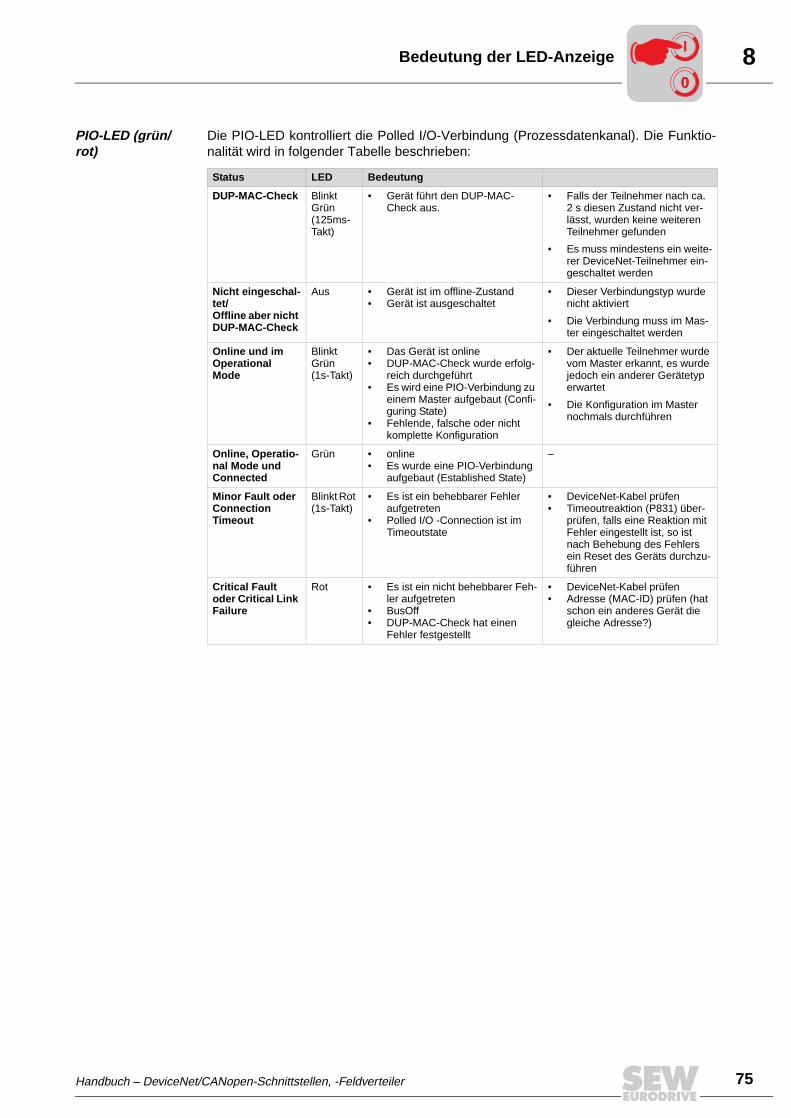
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 75
8Bedeutung der LED-Anzeige
PIO-LED (grün/rot)
Die PIO-LED kontrolliert die Polled I/O-Verbindung (Prozessdatenkanal). Die Funktio-nalität wird in folgender Tabelle beschrieben:
Status LED Bedeutung
DUP-MAC-Check Blinkt Grün (125ms-Takt)
• Gerät führt den DUP-MAC-Check aus.
• Falls der Teilnehmer nach ca. 2 s diesen Zustand nicht ver-lässt, wurden keine weiteren Teilnehmer gefunden
• Es muss mindestens ein weite-rer DeviceNet-Teilnehmer ein-geschaltet werden
Nicht eingeschal-tet/Offline aber nicht DUP-MAC-Check
Aus • Gerät ist im offline-Zustand• Gerät ist ausgeschaltet
• Dieser Verbindungstyp wurde nicht aktiviert
• Die Verbindung muss im Mas-ter eingeschaltet werden
Online und im Operational Mode
Blinkt Grün (1s-Takt)
• Das Gerät ist online• DUP-MAC-Check wurde erfolg-
reich durchgeführt• Es wird eine PIO-Verbindung zu
einem Master aufgebaut (Confi-guring State)
• Fehlende, falsche oder nicht komplette Konfiguration
• Der aktuelle Teilnehmer wurde vom Master erkannt, es wurde jedoch ein anderer Gerätetyp erwartet
• Die Konfiguration im Master nochmals durchführen
Online, Operatio-nal Mode und Connected
Grün • online• Es wurde eine PIO-Verbindung
aufgebaut (Established State)
–
Minor Fault oder Connection Timeout
Blinkt Rot (1s-Takt)
• Es ist ein behebbarer Fehler aufgetreten
• Polled I/O -Connection ist im Timeoutstate
• DeviceNet-Kabel prüfen• Timeoutreaktion (P831) über-
prüfen, falls eine Reaktion mit Fehler eingestellt ist, so ist nach Behebung des Fehlers ein Reset des Geräts durchzu-führen
Critical Fault oder Critical Link Failure
Rot • Es ist ein nicht behebbarer Feh-ler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
00
I
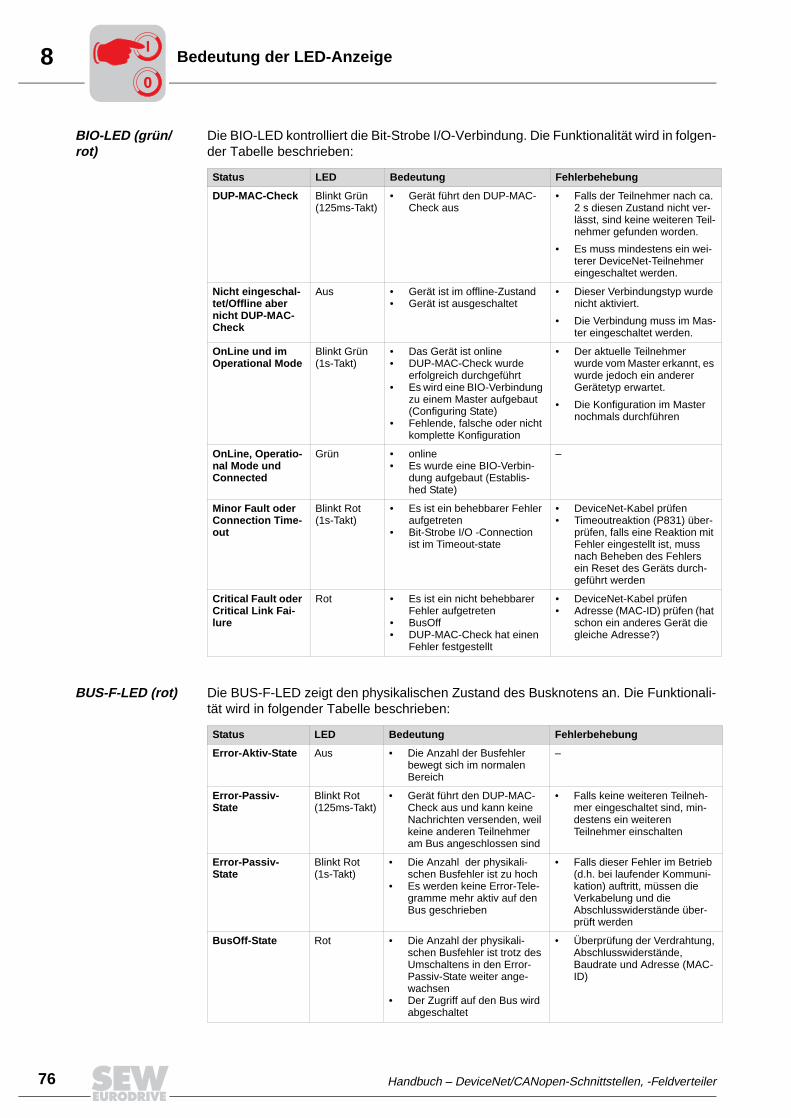
8
76 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Bedeutung der LED-Anzeige
BIO-LED (grün/rot)
Die BIO-LED kontrolliert die Bit-Strobe I/O-Verbindung. Die Funktionalität wird in folgen-der Tabelle beschrieben:
BUS-F-LED (rot) Die BUS-F-LED zeigt den physikalischen Zustand des Busknotens an. Die Funktionali-tät wird in folgender Tabelle beschrieben:
Status LED Bedeutung Fehlerbehebung
DUP-MAC-Check Blinkt Grün (125ms-Takt)
• Gerät führt den DUP-MAC-Check aus
• Falls der Teilnehmer nach ca. 2 s diesen Zustand nicht ver-lässt, sind keine weiteren Teil-nehmer gefunden worden.
• Es muss mindestens ein wei-terer DeviceNet-Teilnehmer eingeschaltet werden.
Nicht eingeschal-tet/Offline aber nicht DUP-MAC-Check
Aus • Gerät ist im offline-Zustand• Gerät ist ausgeschaltet
• Dieser Verbindungstyp wurde nicht aktiviert.
• Die Verbindung muss im Mas-ter eingeschaltet werden.
OnLine und im Operational Mode
Blinkt Grün (1s-Takt)
• Das Gerät ist online• DUP-MAC-Check wurde
erfolgreich durchgeführt• Es wird eine BIO-Verbindung
zu einem Master aufgebaut (Configuring State)
• Fehlende, falsche oder nicht komplette Konfiguration
• Der aktuelle Teilnehmer wurde vom Master erkannt, es wurde jedoch ein anderer Gerätetyp erwartet.
• Die Konfiguration im Master nochmals durchführen
OnLine, Operatio-nal Mode und Connected
Grün • online• Es wurde eine BIO-Verbin-
dung aufgebaut (Establis-hed State)
–
Minor Fault oder Connection Time-out
Blinkt Rot (1s-Takt)
• Es ist ein behebbarer Fehler aufgetreten
• Bit-Strobe I/O -Connection ist im Timeout-state
• DeviceNet-Kabel prüfen• Timeoutreaktion (P831) über-
prüfen, falls eine Reaktion mit Fehler eingestellt ist, muss nach Beheben des Fehlers ein Reset des Geräts durch-geführt werden
Critical Fault oder Critical Link Fai-lure
Rot • Es ist ein nicht behebbarer Fehler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
Status LED Bedeutung Fehlerbehebung
Error-Aktiv-State Aus • Die Anzahl der Busfehler bewegt sich im normalen Bereich
–
Error-Passiv-State
Blinkt Rot (125ms-Takt)
• Gerät führt den DUP-MAC-Check aus und kann keine Nachrichten versenden, weil keine anderen Teilnehmer am Bus angeschlossen sind
• Falls keine weiteren Teilneh-mer eingeschaltet sind, min-destens ein weiteren Teilnehmer einschalten
Error-Passiv-State
Blinkt Rot (1s-Takt)
• Die Anzahl der physikali-schen Busfehler ist zu hoch
• Es werden keine Error-Tele-gramme mehr aktiv auf den Bus geschrieben
• Falls dieser Fehler im Betrieb (d.h. bei laufender Kommuni-kation) auftritt, müssen die Verkabelung und die Abschlusswiderstände über-prüft werden
BusOff-State Rot • Die Anzahl der physikali-schen Busfehler ist trotz des Umschaltens in den Error-Passiv-State weiter ange-wachsen
• Der Zugriff auf den Bus wird abgeschaltet
• Überprüfung der Verdrahtung, Abschlusswiderstände, Baudrate und Adresse (MAC-ID)
00
I

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 77
8Bedeutung der LED-Anzeige
SYS-F-LED (rot) Die LED SYS-F ist in den PD-Konfigurationen 0 PD + DI/DO und 0 PD + DI generellohne Funktion.
LED Bedeutung Fehlerbehebung
Aus • Normaler Betriebszustand der MFD und MOVIMOT®
–
blinkt 1x • MFD Betriebszustand OK, MOVIMOT® meldet Fehler
• Werten Sie die Fehlernummer im MOVIMOT®-Statuswort 1 in der Steuerung aus
• MOVIMOT® über die Steuerung (Reset-Bit im Steuerwort 1) zurücksetzen
• Weitere Informationen finden Sie in der Betriebsanleitung MOVIMOT®
blinkt 2x • MOVIMOT® reagiert nicht auf Sollwerte vom DeviceNet-Mas-ter, da PD-Daten nicht freigege-ben sind
• Überprüfen Sie die DIP-Schalter S1/1 S1/4 am MOVIMOT®
• Stellen Sie die RS-485-Adresse 1 ein, damit die PO-Daten freigegeben werden.
Ein • Kommunikationsverbindung zwischen MFD und MOVIMOT® ist gestört bzw. unterbrochen
• Überprüfen Sie die elektrische Verbindung zwi-schen MFD und MOVIMOT® (Klemmen RS+ und RS-)
• Wartungschalter am Feld-verteiler steht auf OFF
• Überprüfen Sie die Einstellung des Wartungs-Schalters am Feldverteiler
00
I
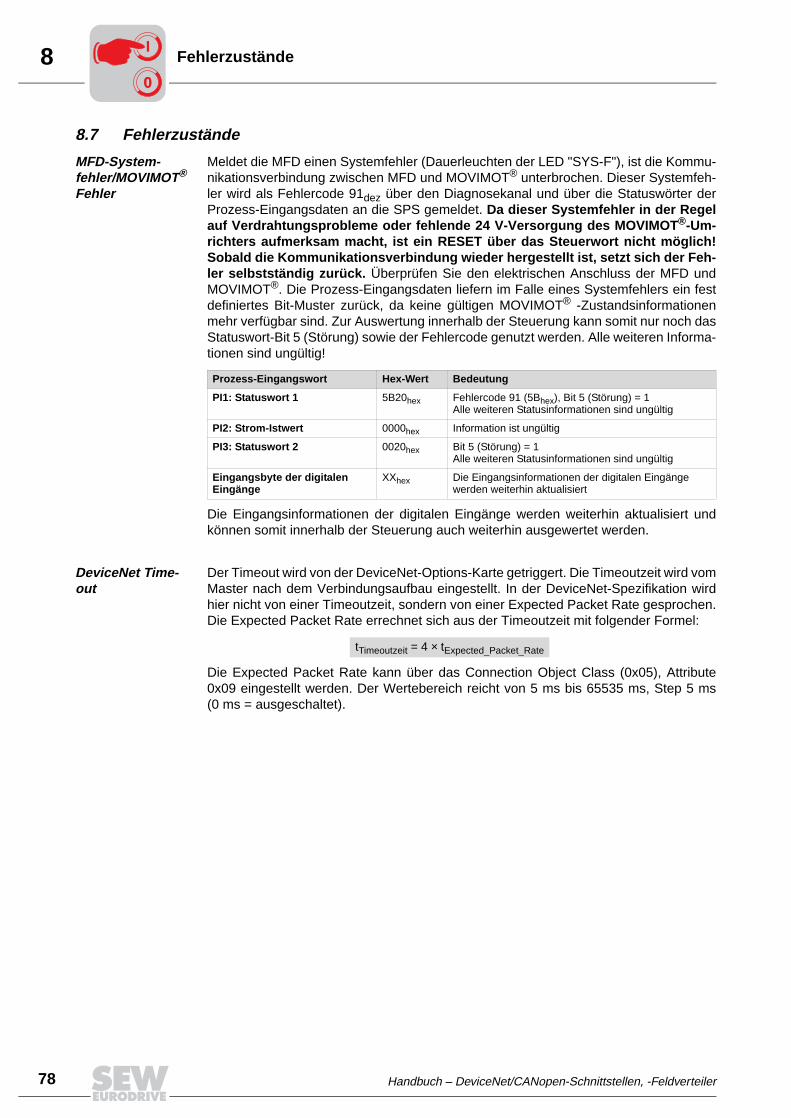
8
78 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Fehlerzustände
8.7 Fehlerzustände
MFD-System-fehler/MOVIMOT® Fehler
Meldet die MFD einen Systemfehler (Dauerleuchten der LED "SYS-F"), ist die Kommu-nikationsverbindung zwischen MFD und MOVIMOT® unterbrochen. Dieser Systemfeh-ler wird als Fehlercode 91dez über den Diagnosekanal und über die Statuswörter derProzess-Eingangsdaten an die SPS gemeldet. Da dieser Systemfehler in der Regelauf Verdrahtungsprobleme oder fehlende 24 V-Versorgung des MOVIMOT®-Um-richters aufmerksam macht, ist ein RESET über das Steuerwort nicht möglich!Sobald die Kommunikationsverbindung wieder hergestellt ist, setzt sich der Feh-ler selbstständig zurück. Überprüfen Sie den elektrischen Anschluss der MFD undMOVIMOT®. Die Prozess-Eingangsdaten liefern im Falle eines Systemfehlers ein festdefiniertes Bit-Muster zurück, da keine gültigen MOVIMOT® -Zustandsinformationenmehr verfügbar sind. Zur Auswertung innerhalb der Steuerung kann somit nur noch dasStatuswort-Bit 5 (Störung) sowie der Fehlercode genutzt werden. Alle weiteren Informa-tionen sind ungültig!
Die Eingangsinformationen der digitalen Eingänge werden weiterhin aktualisiert undkönnen somit innerhalb der Steuerung auch weiterhin ausgewertet werden.
DeviceNet Time-out
Der Timeout wird von der DeviceNet-Options-Karte getriggert. Die Timeoutzeit wird vomMaster nach dem Verbindungsaufbau eingestellt. In der DeviceNet-Spezifikation wirdhier nicht von einer Timeoutzeit, sondern von einer Expected Packet Rate gesprochen.Die Expected Packet Rate errechnet sich aus der Timeoutzeit mit folgender Formel:
Die Expected Packet Rate kann über das Connection Object Class (0x05), Attribute0x09 eingestellt werden. Der Wertebereich reicht von 5 ms bis 65535 ms, Step 5 ms(0 ms = ausgeschaltet).
Prozess-Eingangswort Hex-Wert Bedeutung
PI1: Statuswort 1 5B20hex Fehlercode 91 (5Bhex), Bit 5 (Störung) = 1 Alle weiteren Statusinformationen sind ungültig
PI2: Strom-Istwert 0000hex Information ist ungültig
PI3: Statuswort 2 0020hex Bit 5 (Störung) = 1Alle weiteren Statusinformationen sind ungültig
Eingangsbyte der digitalen Eingänge
XXhex Die Eingangsinformationen der digitalen Eingänge werden weiterhin aktualisiert
tTimeoutzeit = 4 × tExpected_Packet_Rate
00
I
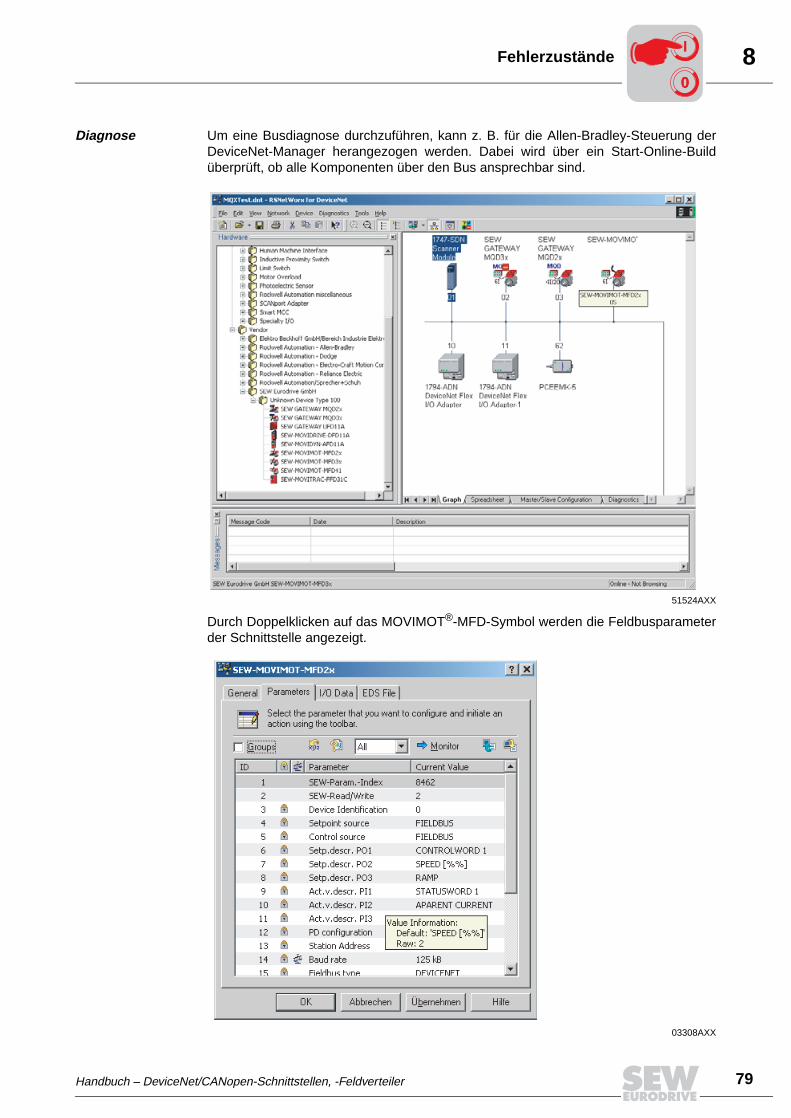
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 79
8Fehlerzustände
Diagnose Um eine Busdiagnose durchzuführen, kann z. B. für die Allen-Bradley-Steuerung derDeviceNet-Manager herangezogen werden. Dabei wird über ein Start-Online-Buildüberprüft, ob alle Komponenten über den Bus ansprechbar sind.
Durch Doppelklicken auf das MOVIMOT®-MFD-Symbol werden die Feldbusparameterder Schnittstelle angezeigt.
51524AXX
03308AXX
00
I
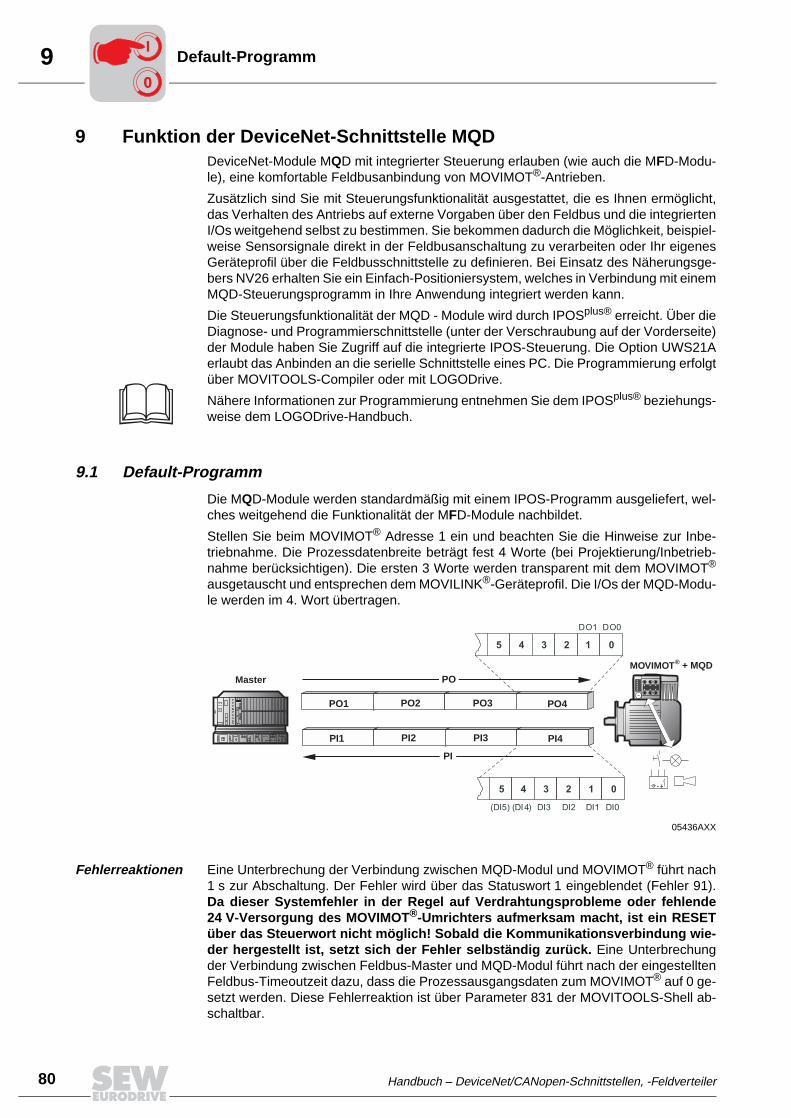
9
80 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Default-Programm
9 Funktion der DeviceNet-Schnittstelle MQDDeviceNet-Module MQD mit integrierter Steuerung erlauben (wie auch die MFD-Modu-le), eine komfortable Feldbusanbindung von MOVIMOT®-Antrieben.
Zusätzlich sind Sie mit Steuerungsfunktionalität ausgestattet, die es Ihnen ermöglicht,das Verhalten des Antriebs auf externe Vorgaben über den Feldbus und die integriertenI/Os weitgehend selbst zu bestimmen. Sie bekommen dadurch die Möglichkeit, beispiel-weise Sensorsignale direkt in der Feldbusanschaltung zu verarbeiten oder Ihr eigenesGeräteprofil über die Feldbusschnittstelle zu definieren. Bei Einsatz des Näherungsge-bers NV26 erhalten Sie ein Einfach-Positioniersystem, welches in Verbindung mit einemMQD-Steuerungsprogramm in Ihre Anwendung integriert werden kann.
Die Steuerungsfunktionalität der MQD - Module wird durch IPOSplus® erreicht. Über dieDiagnose- und Programmierschnittstelle (unter der Verschraubung auf der Vorderseite)der Module haben Sie Zugriff auf die integrierte IPOS-Steuerung. Die Option UWS21Aerlaubt das Anbinden an die serielle Schnittstelle eines PC. Die Programmierung erfolgtüber MOVITOOLS-Compiler oder mit LOGODrive.
Nähere Informationen zur Programmierung entnehmen Sie dem IPOSplus® beziehungs-weise dem LOGODrive-Handbuch.
9.1 Default-Programm
Die MQD-Module werden standardmäßig mit einem IPOS-Programm ausgeliefert, wel-ches weitgehend die Funktionalität der MFD-Module nachbildet.
Stellen Sie beim MOVIMOT® Adresse 1 ein und beachten Sie die Hinweise zur Inbe-triebnahme. Die Prozessdatenbreite beträgt fest 4 Worte (bei Projektierung/Inbetrieb-nahme berücksichtigen). Die ersten 3 Worte werden transparent mit dem MOVIMOT®
ausgetauscht und entsprechen dem MOVILINK®-Geräteprofil. Die I/Os der MQD-Modu-le werden im 4. Wort übertragen.
Fehlerreaktionen Eine Unterbrechung der Verbindung zwischen MQD-Modul und MOVIMOT® führt nach1 s zur Abschaltung. Der Fehler wird über das Statuswort 1 eingeblendet (Fehler 91).Da dieser Systemfehler in der Regel auf Verdrahtungsprobleme oder fehlende24 V-Versorgung des MOVIMOT®-Umrichters aufmerksam macht, ist ein RESETüber das Steuerwort nicht möglich! Sobald die Kommunikationsverbindung wie-der hergestellt ist, setzt sich der Fehler selbständig zurück. Eine Unterbrechungder Verbindung zwischen Feldbus-Master und MQD-Modul führt nach der eingestelltenFeldbus-Timeoutzeit dazu, dass die Prozessausgangsdaten zum MOVIMOT® auf 0 ge-setzt werden. Diese Fehlerreaktion ist über Parameter 831 der MOVITOOLS-Shell ab-schaltbar.
05436AXX
MOVIMOT®
PO1 PO2 PO3
Master
-+
PI1 PI2 PI3
PO
PI
PO4
PI4
5 4 3 2 1 0
5 4 3 2 1 0
(DI5) (DI4) DI3 DI2 DI1 DI0
DO1 DO0
+ MQD
00
I
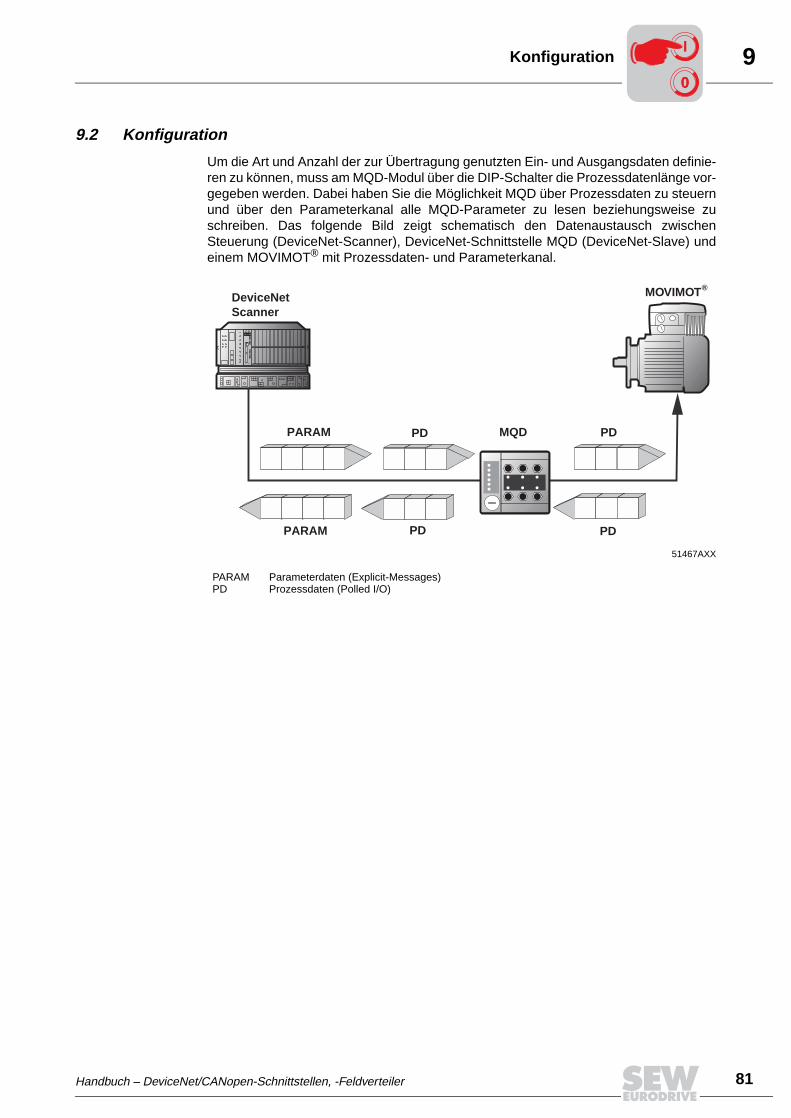
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 81
9Konfiguration
9.2 Konfiguration
Um die Art und Anzahl der zur Übertragung genutzten Ein- und Ausgangsdaten definie-ren zu können, muss am MQD-Modul über die DIP-Schalter die Prozessdatenlänge vor-gegeben werden. Dabei haben Sie die Möglichkeit MQD über Prozessdaten zu steuernund über den Parameterkanal alle MQD-Parameter zu lesen beziehungsweise zuschreiben. Das folgende Bild zeigt schematisch den Datenaustausch zwischenSteuerung (DeviceNet-Scanner), DeviceNet-Schnittstelle MQD (DeviceNet-Slave) undeinem MOVIMOT® mit Prozessdaten- und Parameterkanal.
51467AXX
PARAM Parameterdaten (Explicit-Messages)PD Prozessdaten (Polled I/O)
MOVIMOT®
MQD
DeviceNet Scanner
PARAM PD
PARAM PD
PD
PD
00
I
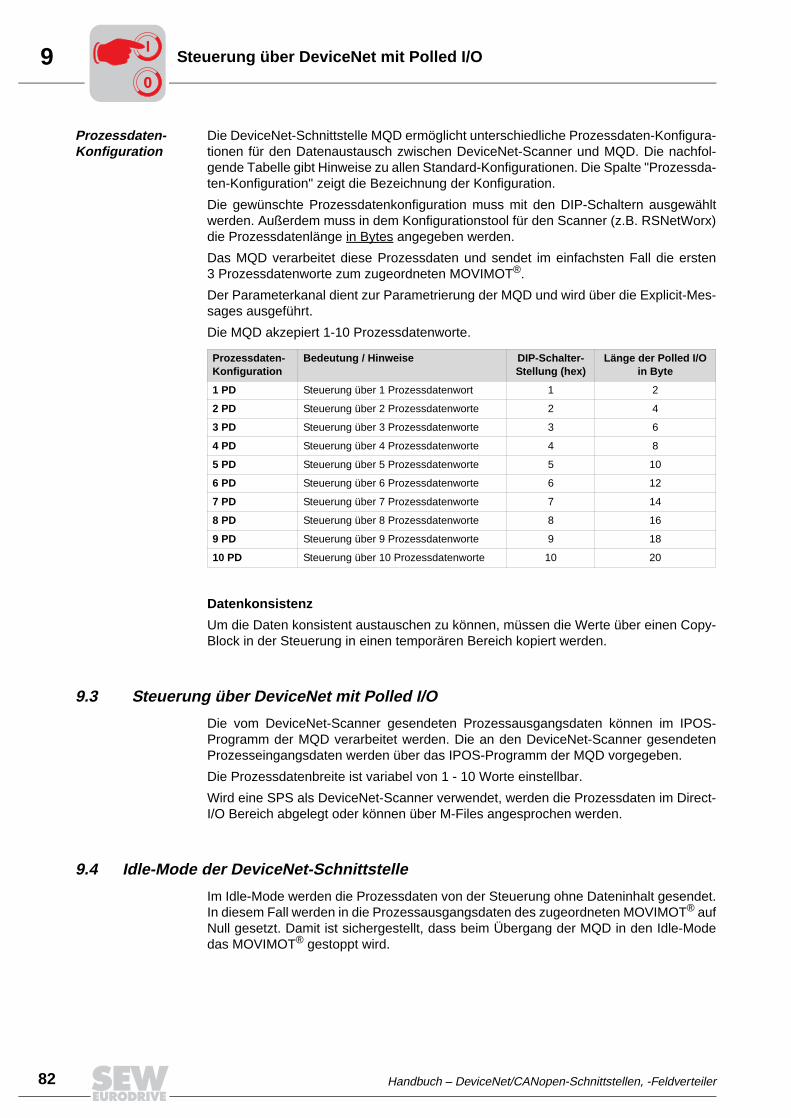
9
82 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Steuerung über DeviceNet mit Polled I/O
Prozessdaten-Konfiguration
Die DeviceNet-Schnittstelle MQD ermöglicht unterschiedliche Prozessdaten-Konfigura-tionen für den Datenaustausch zwischen DeviceNet-Scanner und MQD. Die nachfol-gende Tabelle gibt Hinweise zu allen Standard-Konfigurationen. Die Spalte "Prozessda-ten-Konfiguration" zeigt die Bezeichnung der Konfiguration.
Die gewünschte Prozessdatenkonfiguration muss mit den DIP-Schaltern ausgewähltwerden. Außerdem muss in dem Konfigurationstool für den Scanner (z.B. RSNetWorx)die Prozessdatenlänge in Bytes angegeben werden.
Das MQD verarbeitet diese Prozessdaten und sendet im einfachsten Fall die ersten3 Prozessdatenworte zum zugeordneten MOVIMOT®.
Der Parameterkanal dient zur Parametrierung der MQD und wird über die Explicit-Mes-sages ausgeführt.
Die MQD akzepiert 1-10 Prozessdatenworte.
Datenkonsistenz
Um die Daten konsistent austauschen zu können, müssen die Werte über einen Copy-Block in der Steuerung in einen temporären Bereich kopiert werden.
9.3 Steuerung über DeviceNet mit Polled I/O
Die vom DeviceNet-Scanner gesendeten Prozessausgangsdaten können im IPOS-Programm der MQD verarbeitet werden. Die an den DeviceNet-Scanner gesendetenProzesseingangsdaten werden über das IPOS-Programm der MQD vorgegeben.
Die Prozessdatenbreite ist variabel von 1 - 10 Worte einstellbar.
Wird eine SPS als DeviceNet-Scanner verwendet, werden die Prozessdaten im Direct-I/O Bereich abgelegt oder können über M-Files angesprochen werden.
9.4 Idle-Mode der DeviceNet-Schnittstelle
Im Idle-Mode werden die Prozessdaten von der Steuerung ohne Dateninhalt gesendet.In diesem Fall werden in die Prozessausgangsdaten des zugeordneten MOVIMOT® aufNull gesetzt. Damit ist sichergestellt, dass beim Übergang der MQD in den Idle-Modedas MOVIMOT® gestoppt wird.
Prozessdaten-Konfiguration
Bedeutung / Hinweise DIP-Schalter-Stellung (hex)
Länge der Polled I/O in Byte
1 PD Steuerung über 1 Prozessdatenwort 1 2
2 PD Steuerung über 2 Prozessdatenworte 2 4
3 PD Steuerung über 3 Prozessdatenworte 3 6
4 PD Steuerung über 4 Prozessdatenworte 4 8
5 PD Steuerung über 5 Prozessdatenworte 5 10
6 PD Steuerung über 6 Prozessdatenworte 6 12
7 PD Steuerung über 7 Prozessdatenworte 7 14
8 PD Steuerung über 8 Prozessdatenworte 8 16
9 PD Steuerung über 9 Prozessdatenworte 9 18
10 PD Steuerung über 10 Prozessdatenworte 10 20
00
I
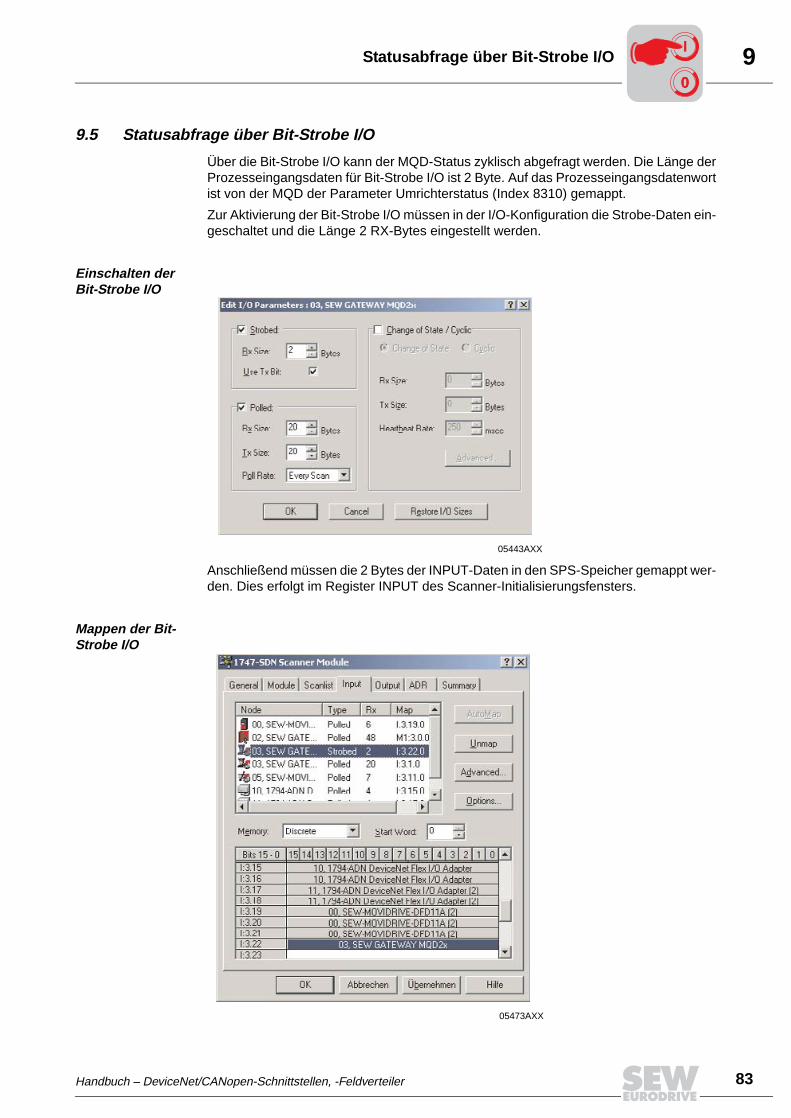
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 83
9Statusabfrage über Bit-Strobe I/O
9.5 Statusabfrage über Bit-Strobe I/O
Über die Bit-Strobe I/O kann der MQD-Status zyklisch abgefragt werden. Die Länge derProzesseingangsdaten für Bit-Strobe I/O ist 2 Byte. Auf das Prozesseingangsdatenwortist von der MQD der Parameter Umrichterstatus (Index 8310) gemappt.
Zur Aktivierung der Bit-Strobe I/O müssen in der I/O-Konfiguration die Strobe-Daten ein-geschaltet und die Länge 2 RX-Bytes eingestellt werden.
Einschalten der Bit-Strobe I/O
Anschließend müssen die 2 Bytes der INPUT-Daten in den SPS-Speicher gemappt wer-den. Dies erfolgt im Register INPUT des Scanner-Initialisierungsfensters.
Mappen der Bit-Strobe I/O
05443AXX
05473AXX
00
I
9
84 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Parametrierung über DeviceNet
9.6 Parametrierung über DeviceNet
Parametrierung MQD über RSNet-Worx
Alle Parameter der MQD können über die Projektierungssoftware RSNetWorx ange-sprochen werden.
Dabei werden die Parameter in mehrere Gruppen unterteilt:
SEW-Parameter-Channel
Der SEW-Parameter-Channel umfasst folgenden Zugriffsmechanismus:
Ablauf der Parametrierung:
1. Einstellen und Download des Index, der gelesen/geschrieben werden soll
2. Einstellen und Download der Geräte-Sub-Adresse
3. Einstellen oder Lesen der Daten, die geschrieben werden sollen
Gruppe Bedeutung/Funktion
SEW-Parameter-Channel Zugriff zu allen Parametern über Index und Adresse möglich
Device Parameter Direkter Zugriff auf die MQD-Parameter und der über RS-485 angeschlos-senen MOVIMOT®
MQD Parameter Direkter Zugriff auf die MQD-Parameter
PO-Monitor Direkter Zugriff auf den Prozessausgangsdatenmonitor
PI-Monitor Direkter Zugriff auf den Prozesseingangsdatenmonitor
Nr. Gruppe Parameter Bedeutung/Funktion
1 SEW-Parameter-Channel
SEW-Param.-Index
Index des Parameters, über den die Daten gelesen/geschrieben werden sollen
2 SEW-Param.-Address
Adresse des Geräts, von dem die Daten gelesen/geschrieben werden sollen Sub-Adresse der MQD = 0
3 SEW-Read/Write Daten lesen/schreiben, in Abhängigkeit von der oben eingestellten Adresse und Index
00
I
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 85
9Parametrierung über DeviceNet
Device Parameter Alle Parameter, die unmittelbar mit der Feldbuskommunikation in Verbindung stehen,können direkt über RSNetWorx gelesen werden. Vorher muss die Adresse von dem Ge-rät eingestellt werden, von dem die Daten gelesen werden sollen (MQD-Sub-Adresse = 0).
Die Parameter sind in der folgenden Tabelle aufgeführt. In der Spalte Nr. werden Para-meter, die nur gelesen werden können, mit einem R = Read-Only gekennzeichnet:
MQD Parameter Die Parameter, die nur für das MQD zur Verfügung stehen, können mit dieser Gruppeüber RSNetWorx gelesen werden.
Die Parameter sind in der folgenden Tabelle aufgeführt (In der Spalte Nr. werden Para-meter, die nur gelesen werden können, mit einem R = Read-Only gekennzeichnet):
Nr. Gruppe Name Bemerkung
2 SEW-Param.-Address Adresse des Geräts, von dem die Daten gelesen/geschrieben werden sollen (MQD-Sub-Adresse = 0)
4R Device Parameter Device Identification Gerätekennung
5R Device Parameter Setpoint source Sollwertquelle
6R Device Parameter Control source Steuerquelle
7R Device Parameter Setp.descr.PO1 Prozessausgangsdaten Belegung für PO1
8R Device Parameter Setp.descr.PO2 Prozessausgangsdaten Belegung für PO2
9R Device Parameter Setp.descr.PO3 Prozessausgangsdaten Belegung für PO3
10R Device Parameter Act.v.descr. PI1 ProzesseingangsdatenBelegung für PI1
11R Device Parameter Act.v.descr. PI2 ProzesseingangsdatenBelegung für PI2
12R Device Parameter Act.v.descr. PI3 ProzesseingangsdatenBelegung für PI3
13R Device Parameter PD Configuration Prozessdatenkonfiguration
Nr. Gruppe Name Bemerkung
14R MQD Parameter Station Address Geräteadresse (MAC-ID)
15R MQD Parameter Baud Rate Baudrate DeviceNet
16R MQD Parameter Fieldbus Type Feldbus Typ
17R MQD Parameter Timeout Response Timeout Reaktion
00
I
9
86 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Parametrierung über DeviceNet
PO-Monitor Die Prozessausgangsdaten können über diese Gruppe beobachtet werden. Vorhermuss die Adresse von dem Gerät eingestellt werden, von dem die Daten gelesen wer-den sollen (MQD-Sub-Adresse = 0).
Die Parameter sind in der folgenden Tabelle aufgeführt (In der Spalte Nr. werden Para-meter, die nur gelesen werden können, mit einem R = Read-Only gekennzeichnet):
PI-Monitor Die Prozesseingangsdaten können über diese Gruppe beobachtet werden. Vorhermuss die Adresse von dem Gerät eingestellt werden, von dem die Daten gelesen wer-den sollen (MQD-Sub-Adresse = 0).
Die Parameter sind in der folgenden Tabelle aufgeführt (In der Spalte Nr. werden Para-meter, die nur gelesen werden können, mit einem R = Read-Only gekennzeichnet):
Nr. Gruppe Name Bemerkung
2 SEW-Param.-Address Adresse des Geräts, von dem die Daten gelesen/geschrieben werden sollen (MQD-Sub-Adresse = 0)
19R PO Monitor PO1 Setpoint Prozessdaten PO1
20R PO Monitor PO2 Setpoint Prozessdaten PO2
21R PO Monitor PO3 Setpoint Prozessdaten PO3
22R PO Monitor PO4 Setpoint Prozessdaten PO4
23R PO Monitor PO5 Setpoint Prozessdaten PO5
24R PO Monitor PO6 Setpoint Prozessdaten PO6
25R PO Monitor PO7 Setpoint Prozessdaten PO7
26R PO Monitor PO8 Setpoint Prozessdaten PO8
27R PO Monitor PO9 Setpoint Prozessdaten PO9
28R PO Monitor PO10 Setpoint Prozessdaten PO10
Nr. Gruppe Name Bemerkung
2 SEW-Param.-Address Adresse des Geräts, von dem die Daten gelesen/geschrieben werden sollen (MQD-Sub-Adresse = 0)
29R PI Monitor PI1 Setpoint Prozessdaten PI1
30R PI Monitor PI2 Setpoint Prozessdaten PI2
31R PI Monitor PI3 Setpoint Prozessdaten PI3
32R PI Monitor PI4 Setpoint Prozessdaten PI4
33R PI Monitor PI5 Setpoint Prozessdaten PI5
34R PI Monitor PI6 Setpoint Prozessdaten PI6
35R PI Monitor PI7 Setpoint Prozessdaten PI7
36R PI Monitor PI8 Setpoint Prozessdaten PI8
37R PI Monitor PI9 Setpoint Prozessdaten PI9
38R PI Monitor PI10 Setpoint Prozessdaten PI10
00
I
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 87
9Duplicate MAC-ID Detection
Austausch von Explicit Mes-sages (Parame-terdaten) über das Register-Objekt
Über das Register-Objekt kann direkt auf alle MQD-Parameter zugegriffen werden.Hierzu muss eine Explicit Message mit folgendem Aufbau versendet werden:
Im Beispiel (Tabelle oben): wird vom MQD (Adresse 0) der Parameter mit dem Index2070h = 8304 mit dem Wert 9 = Steuerwort 1 beschrieben.
9.7 Duplicate MAC-ID Detection
Um sicherzustellen, dass alle Teilnehmer, die am Bus angeschlossen sind und Device-Net-konform sind, eine unterschiedliche Adresse haben, wird ein sogenannter "Duplica-te MAC-ID Check" vorgenommen.
Dieser Test wird nach dem Power Up durchgeführt und über die LEDs angezeigt.
ByteOffset
0 1 2 3 4 5 6 7 8 9 10 11
Funktion MAC-ID
Ser-vice
Class In-stance
Attri-bute
Index Daten Sub-Adresse
Wertigkeit Low High LSB MSB
Beispiel 01h 10h 07h 02h 04h 70h 20h 09h 00h 00h 00h 00h
Service Codierung Bedeutung
Get_Attribut_Single 0x0E Attribut lesen
Set_Attribut_Single 0x10 Attribut schreiben
00
I
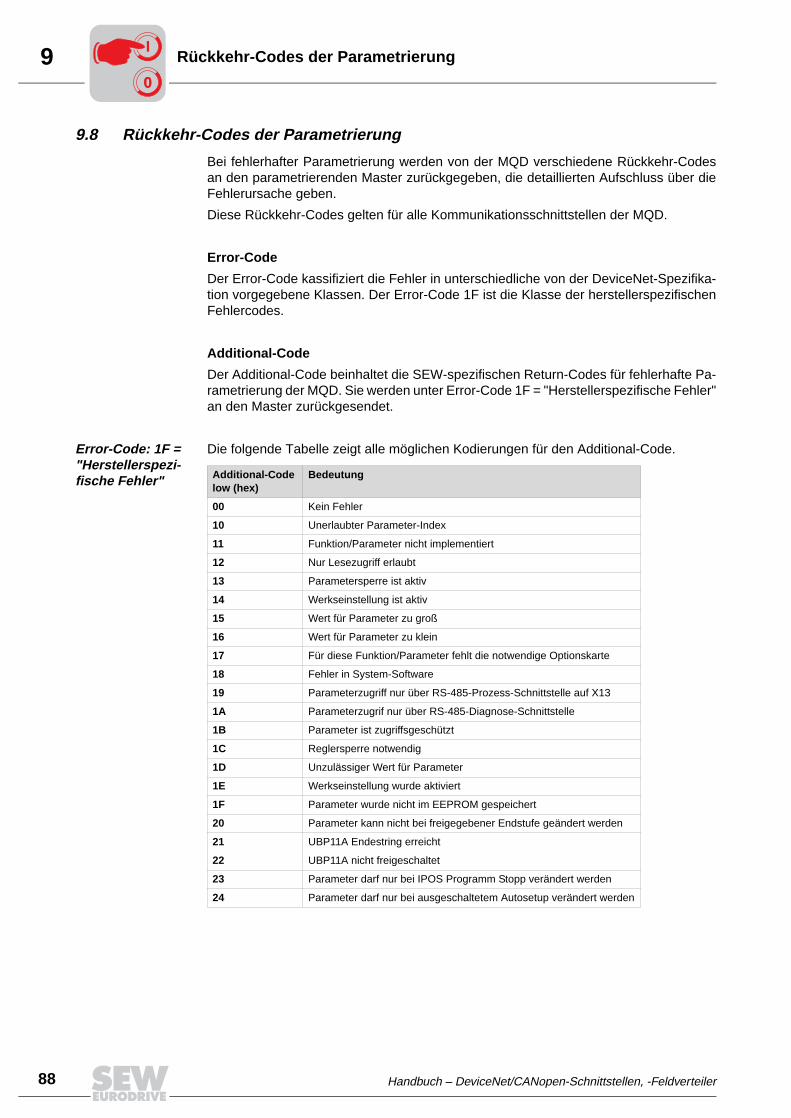
9
88 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Rückkehr-Codes der Parametrierung
9.8 Rückkehr-Codes der Parametrierung
Bei fehlerhafter Parametrierung werden von der MQD verschiedene Rückkehr-Codesan den parametrierenden Master zurückgegeben, die detaillierten Aufschluss über dieFehlerursache geben.
Diese Rückkehr-Codes gelten für alle Kommunikationsschnittstellen der MQD.
Error-Code
Der Error-Code kassifiziert die Fehler in unterschiedliche von der DeviceNet-Spezifika-tion vorgegebene Klassen. Der Error-Code 1F ist die Klasse der herstellerspezifischenFehlercodes.
Additional-Code
Der Additional-Code beinhaltet die SEW-spezifischen Return-Codes für fehlerhafte Pa-rametrierung der MQD. Sie werden unter Error-Code 1F = "Herstellerspezifische Fehler"an den Master zurückgesendet.
Error-Code: 1F = "Herstellerspezi-fische Fehler"
Die folgende Tabelle zeigt alle möglichen Kodierungen für den Additional-Code.
Additional-Code low (hex)
Bedeutung
00 Kein Fehler
10 Unerlaubter Parameter-Index
11 Funktion/Parameter nicht implementiert
12 Nur Lesezugriff erlaubt
13 Parametersperre ist aktiv
14 Werkseinstellung ist aktiv
15 Wert für Parameter zu groß
16 Wert für Parameter zu klein
17 Für diese Funktion/Parameter fehlt die notwendige Optionskarte
18 Fehler in System-Software
19 Parameterzugriff nur über RS-485-Prozess-Schnittstelle auf X13
1A Parameterzugrif nur über RS-485-Diagnose-Schnittstelle
1B Parameter ist zugriffsgeschützt
1C Reglersperre notwendig
1D Unzulässiger Wert für Parameter
1E Werkseinstellung wurde aktiviert
1F Parameter wurde nicht im EEPROM gespeichert
20 Parameter kann nicht bei freigegebener Endstufe geändert werden
21 UBP11A Endestring erreicht
22 UBP11A nicht freigeschaltet
23 Parameter darf nur bei IPOS Programm Stopp verändert werden
24 Parameter darf nur bei ausgeschaltetem Autosetup verändert werden
00
I

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 89
9Bedeutung der LED-Anzeige
9.9 Bedeutung der LED-Anzeige
Die DeviceNet-Schnittstelle MQD besitzt fünf LEDs zur Diagnose:
• LED "Mod/Net" (grün/rot) zur Anzeige des Modul- und Netzwerkstatus
• LED "PIO" (grün/rot) zur Anzeige des Zustandes der Polled I/O Verbindung
• LED "BIO" (grün/rot) zur Anzeige des Zustandes der Bit-Strobe I/O Verbindung
• LED "BUS-F" (rot) zur Anzeige von Bus-Fehlern
• LED "SYS-F" (rot) zur Anzeige von Systemfehlern und Betriebszuständen der MQD
Power-Up Nach dem Einschalten des Gerätes wird ein Test aller LEDs durchgeführt. Dabei wer-den die LEDs in folgender Reihenfolge eingeschaltet:
Anschließend prüft das Gerät, ob schon ein Teilnehmer mit der gleichen Adresse ange-schlossen wurde (DUP-MAC-Check). Falls ein anderer Teilnehmer mit der gleichenAdresse gefunden wird, schaltet sich das Gerät ab und die LEDs Mod/Net, PIO und BIOsind dauerhaft rot geschaltet.
50722AXX
MQD
Devic
eNetTM
SYS-F
BUS-F
BIO
PIO
Mod/Net
Zeit Mod/Net-LED PIO-LED BIO-LED BUS-F-LED SYS-F-LED
0 ms grün aus aus aus aus
250 ms rot aus aus aus aus
500 ms aus grün aus aus aus
750 ms aus rot aus aus aus
1000 ms aus aus grün aus aus
1250 ms aus aus rot aus aus
1500 ms aus aus aus rot aus
1750 ms aus aus aus aus rot
2000 ms aus aus aus aus aus
00
I
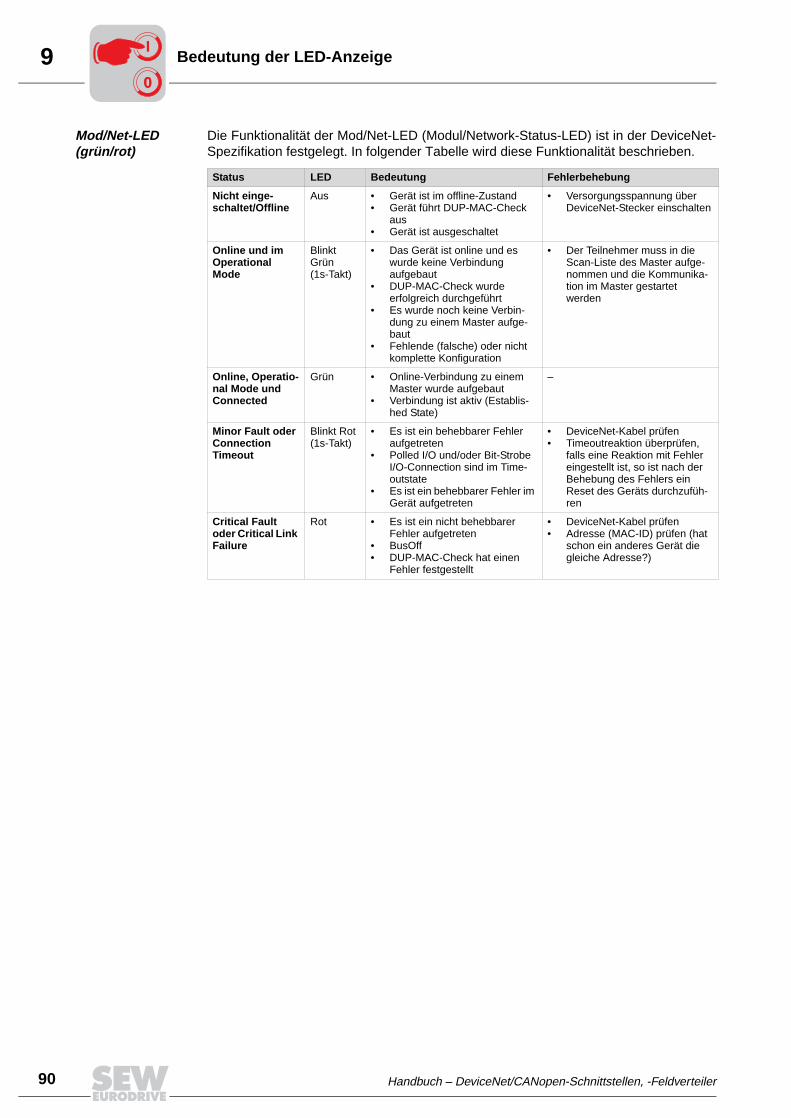
9
90 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Bedeutung der LED-Anzeige
Mod/Net-LED (grün/rot)
Die Funktionalität der Mod/Net-LED (Modul/Network-Status-LED) ist in der DeviceNet-Spezifikation festgelegt. In folgender Tabelle wird diese Funktionalität beschrieben.
Status LED Bedeutung Fehlerbehebung
Nicht einge-schaltet/Offline
Aus • Gerät ist im offline-Zustand• Gerät führt DUP-MAC-Check
aus• Gerät ist ausgeschaltet
• Versorgungsspannung über DeviceNet-Stecker einschalten
Online und im Operational Mode
Blinkt Grün (1s-Takt)
• Das Gerät ist online und es wurde keine Verbindung aufgebaut
• DUP-MAC-Check wurde erfolgreich durchgeführt
• Es wurde noch keine Verbin-dung zu einem Master aufge-baut
• Fehlende (falsche) oder nicht komplette Konfiguration
• Der Teilnehmer muss in die Scan-Liste des Master aufge-nommen und die Kommunika-tion im Master gestartet werden
Online, Operatio-nal Mode und Connected
Grün • Online-Verbindung zu einem Master wurde aufgebaut
• Verbindung ist aktiv (Establis-hed State)
–
Minor Fault oder Connection Timeout
Blinkt Rot (1s-Takt)
• Es ist ein behebbarer Fehler aufgetreten
• Polled I/O und/oder Bit-Strobe I/O-Connection sind im Time-outstate
• Es ist ein behebbarer Fehler im Gerät aufgetreten
• DeviceNet-Kabel prüfen• Timeoutreaktion überprüfen,
falls eine Reaktion mit Fehler eingestellt ist, so ist nach der Behebung des Fehlers ein Reset des Geräts durchzufüh-ren
Critical Fault oder Critical Link Failure
Rot • Es ist ein nicht behebbarer Fehler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
00
I
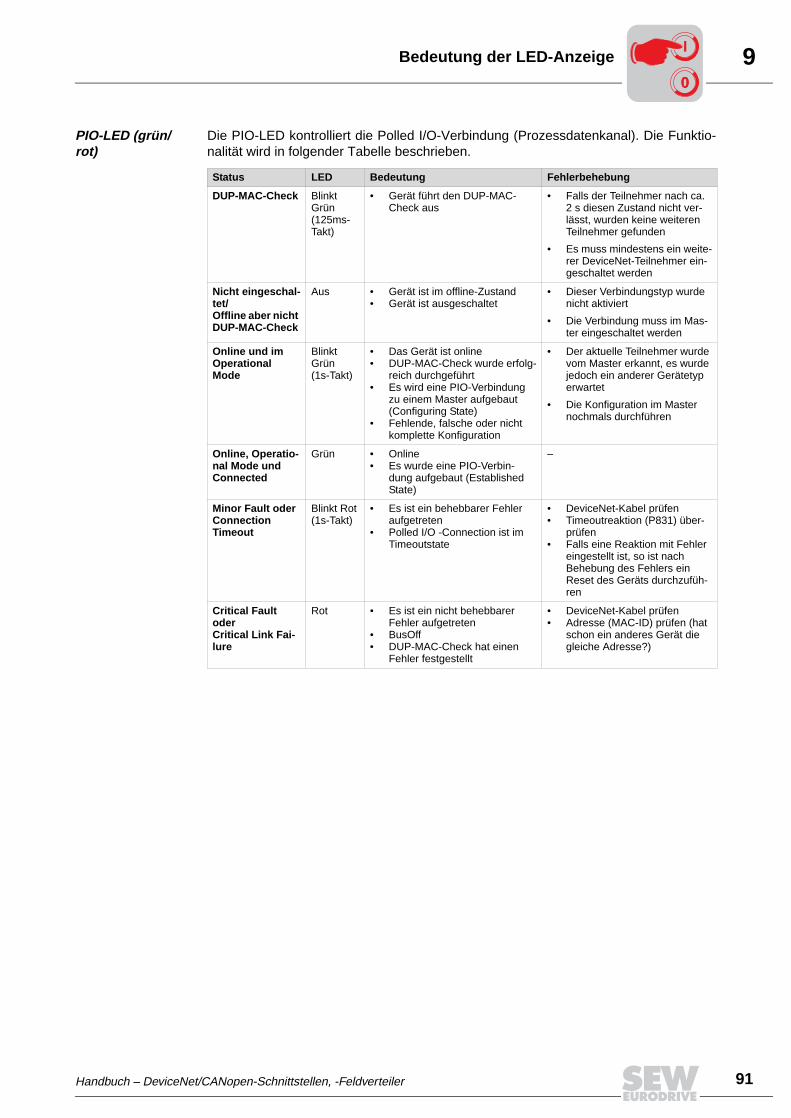
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 91
9Bedeutung der LED-Anzeige
PIO-LED (grün/rot)
Die PIO-LED kontrolliert die Polled I/O-Verbindung (Prozessdatenkanal). Die Funktio-nalität wird in folgender Tabelle beschrieben.
Status LED Bedeutung Fehlerbehebung
DUP-MAC-Check Blinkt Grün(125ms-Takt)
• Gerät führt den DUP-MAC-Check aus
• Falls der Teilnehmer nach ca. 2 s diesen Zustand nicht ver-lässt, wurden keine weiteren Teilnehmer gefunden
• Es muss mindestens ein weite-rer DeviceNet-Teilnehmer ein-geschaltet werden
Nicht eingeschal-tet/Offline aber nicht DUP-MAC-Check
Aus • Gerät ist im offline-Zustand• Gerät ist ausgeschaltet
• Dieser Verbindungstyp wurde nicht aktiviert
• Die Verbindung muss im Mas-ter eingeschaltet werden
Online und im Operational Mode
Blinkt Grün (1s-Takt)
• Das Gerät ist online• DUP-MAC-Check wurde erfolg-
reich durchgeführt• Es wird eine PIO-Verbindung
zu einem Master aufgebaut (Configuring State)
• Fehlende, falsche oder nicht komplette Konfiguration
• Der aktuelle Teilnehmer wurde vom Master erkannt, es wurde jedoch ein anderer Gerätetyp erwartet
• Die Konfiguration im Master nochmals durchführen
Online, Operatio-nal Mode und Connected
Grün • Online• Es wurde eine PIO-Verbin-
dung aufgebaut (Established State)
–
Minor Fault oder Connection Timeout
Blinkt Rot(1s-Takt)
• Es ist ein behebbarer Fehler aufgetreten
• Polled I/O -Connection ist im Timeoutstate
• DeviceNet-Kabel prüfen• Timeoutreaktion (P831) über-
prüfen• Falls eine Reaktion mit Fehler
eingestellt ist, so ist nach Behebung des Fehlers ein Reset des Geräts durchzufüh-ren
Critical Fault oderCritical Link Fai-lure
Rot • Es ist ein nicht behebbarer Fehler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
00
I
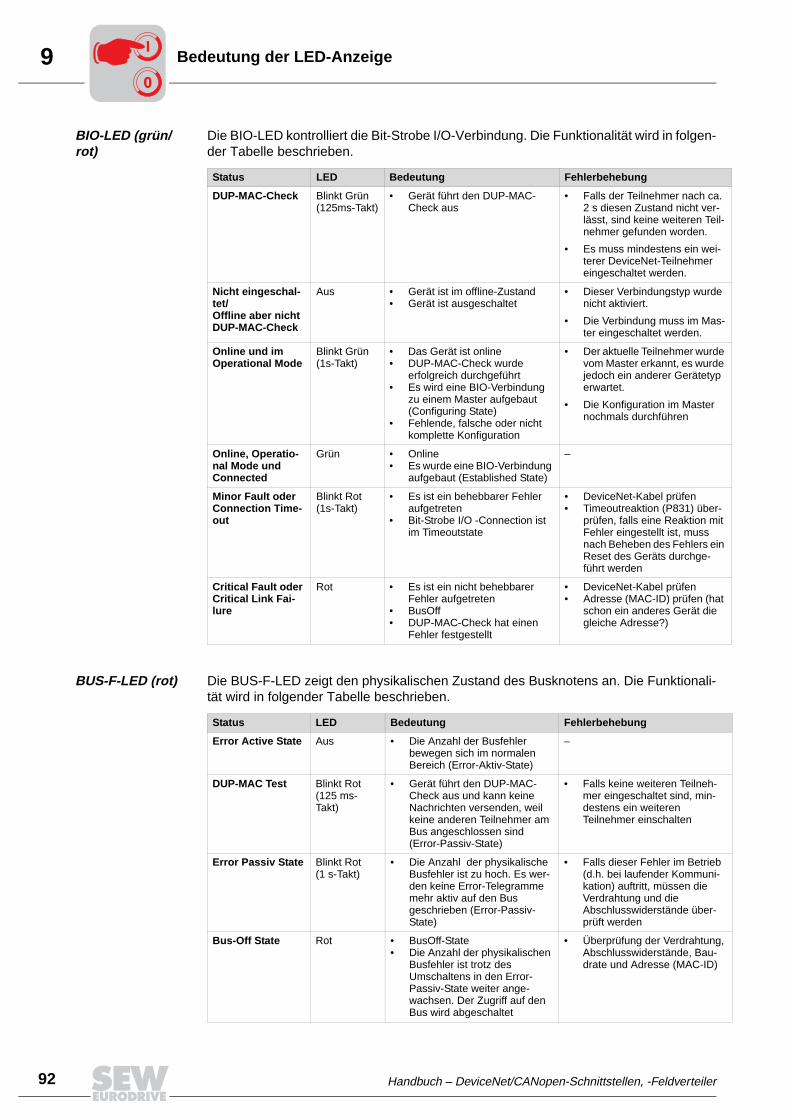
9
92 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Bedeutung der LED-Anzeige
BIO-LED (grün/rot)
Die BIO-LED kontrolliert die Bit-Strobe I/O-Verbindung. Die Funktionalität wird in folgen-der Tabelle beschrieben.
BUS-F-LED (rot) Die BUS-F-LED zeigt den physikalischen Zustand des Busknotens an. Die Funktionali-tät wird in folgender Tabelle beschrieben.
Status LED Bedeutung Fehlerbehebung
DUP-MAC-Check Blinkt Grün (125ms-Takt)
• Gerät führt den DUP-MAC-Check aus
• Falls der Teilnehmer nach ca. 2 s diesen Zustand nicht ver-lässt, sind keine weiteren Teil-nehmer gefunden worden.
• Es muss mindestens ein wei-terer DeviceNet-Teilnehmer eingeschaltet werden.
Nicht eingeschal-tet/Offline aber nichtDUP-MAC-Check
Aus • Gerät ist im offline-Zustand• Gerät ist ausgeschaltet
• Dieser Verbindungstyp wurde nicht aktiviert.
• Die Verbindung muss im Mas-ter eingeschaltet werden.
Online und im Operational Mode
Blinkt Grün (1s-Takt)
• Das Gerät ist online• DUP-MAC-Check wurde
erfolgreich durchgeführt• Es wird eine BIO-Verbindung
zu einem Master aufgebaut (Configuring State)
• Fehlende, falsche oder nicht komplette Konfiguration
• Der aktuelle Teilnehmer wurde vom Master erkannt, es wurde jedoch ein anderer Gerätetyp erwartet.
• Die Konfiguration im Master nochmals durchführen
Online, Operatio-nal Mode und Connected
Grün • Online• Es wurde eine BIO-Verbindung
aufgebaut (Established State)
–
Minor Fault oderConnection Time-out
Blinkt Rot(1s-Takt)
• Es ist ein behebbarer Fehler aufgetreten
• Bit-Strobe I/O -Connection ist im Timeoutstate
• DeviceNet-Kabel prüfen• Timeoutreaktion (P831) über-
prüfen, falls eine Reaktion mit Fehler eingestellt ist, muss nach Beheben des Fehlers ein Reset des Geräts durchge-führt werden
Critical Fault oder Critical Link Fai-lure
Rot • Es ist ein nicht behebbarer Fehler aufgetreten
• BusOff• DUP-MAC-Check hat einen
Fehler festgestellt
• DeviceNet-Kabel prüfen• Adresse (MAC-ID) prüfen (hat
schon ein anderes Gerät die gleiche Adresse?)
Status LED Bedeutung Fehlerbehebung
Error Active State Aus • Die Anzahl der Busfehler bewegen sich im normalen Bereich (Error-Aktiv-State)
–
DUP-MAC Test Blinkt Rot(125 ms-Takt)
• Gerät führt den DUP-MAC-Check aus und kann keine Nachrichten versenden, weil keine anderen Teilnehmer am Bus angeschlossen sind (Error-Passiv-State)
• Falls keine weiteren Teilneh-mer eingeschaltet sind, min-destens ein weiteren Teilnehmer einschalten
Error Passiv State Blinkt Rot (1 s-Takt)
• Die Anzahl der physikalische Busfehler ist zu hoch. Es wer-den keine Error-Telegramme mehr aktiv auf den Bus geschrieben (Error-Passiv-State)
• Falls dieser Fehler im Betrieb (d.h. bei laufender Kommuni-kation) auftritt, müssen die Verdrahtung und die Abschlusswiderstände über-prüft werden
Bus-Off State Rot • BusOff-State • Die Anzahl der physikalischen
Busfehler ist trotz des Umschaltens in den Error-Passiv-State weiter ange-wachsen. Der Zugriff auf den Bus wird abgeschaltet
• Überprüfung der Verdrahtung, Abschlusswiderstände, Bau-drate und Adresse (MAC-ID)
00
I
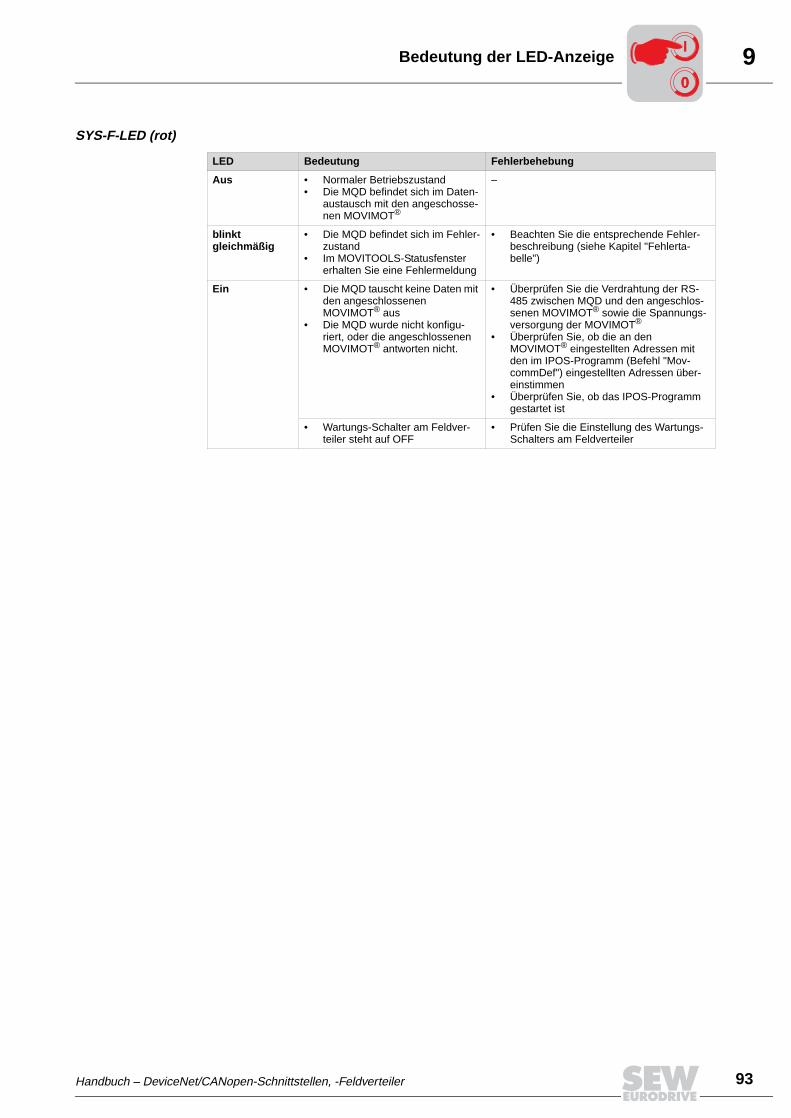
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 93
9Bedeutung der LED-Anzeige
SYS-F-LED (rot)
LED Bedeutung Fehlerbehebung
Aus • Normaler Betriebszustand• Die MQD befindet sich im Daten-
austausch mit den angeschosse-nen MOVIMOT®
–
blinktgleichmäßig
• Die MQD befindet sich im Fehler-zustand
• Im MOVITOOLS-Statusfenster erhalten Sie eine Fehlermeldung
• Beachten Sie die entsprechende Fehler-beschreibung (siehe Kapitel "Fehlerta-belle")
Ein • Die MQD tauscht keine Daten mit den angeschlossenen MOVIMOT® aus
• Die MQD wurde nicht konfigu-riert, oder die angeschlossenen MOVIMOT® antworten nicht.
• Überprüfen Sie die Verdrahtung der RS-485 zwischen MQD und den angeschlos-senen MOVIMOT® sowie die Spannungs-versorgung der MOVIMOT®
• Überprüfen Sie, ob die an den MOVIMOT® eingestellten Adressen mit den im IPOS-Programm (Befehl "Mov-commDef") eingestellten Adressen über-einstimmen
• Überprüfen Sie, ob das IPOS-Programm gestartet ist
• Wartungs-Schalter am Feldver-teiler steht auf OFF
• Prüfen Sie die Einstellung des Wartungs-Schalters am Feldverteiler
00
I
9
94 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Fehlerzustände
9.10 Fehlerzustände
Feldbus-Timeout Das Abschalten des Feldbus-Masters oder ein Drahtbruch der Feldbusverdrahtung führtbei MQD zu einem Feldbus-Timeout. Die angeschlossenen MOVIMOT® werden ge-stoppt, indem in jedem Prozessausgangs-Datenwort "0" gesendet wird. Außerdem wer-den die digitalen Ausgänge auf "0" gesetzt.
Die entspricht beispielsweise einem Schnellstopp auf dem Steuerwort 1. Achtung, wirddas MOVIMOT® mit 3 Prozessdatenworten angesteuert, wird im 3. Wort die Rampemit 0 s vorgegeben!
Der Fehler "Feldbus-Timeout" setzt sich selbständig zurück, d.h. die MOVIMOT®
erhalten nach Wiederanlaufen der Feldbus-Kommunikation sofort wieder die ak-tuellen Prozessausgangsdaten von der Steuerung.
Die Fehlerreaktion kann über P831 der MOVITOOLS-Shell abgeschaltet werden.
RS-485 Timeout Wenn ein oder mehrere MOVIMOT® nicht mehr über RS-485 von der MQD angespro-chen werden können, wird im Statuswort 1 der Fehlercode 91 "Systemfehler" einge-blendet. Die LED "SYS-F" leuchtet daraufhin. Über die Diagnoseschnittstelle wird derFehler ebenfalls übertragen.
MOVIMOT® die keine Daten erhalten, stoppen nach 1 Sekunde. Vorraussetzung hierfürist, dass der Datenaustausch zwischen MQD und MOVIMOT® über die MOVCOMM-Befehle erfolgt. MOVIMOT® die weiterhin Daten erhalten, können wie gewohnt weitergesteuert werden.
Der Timeout setzt sich selbständig zurück, d.h. die aktuellen Prozessdaten werden nachAnlaufen der Kommunikation mit dem nicht erreichbaren MOVIMOT® sofort wieder aus-getauscht.
Gerätefehler Die Feldbus-Schnittstellen MQD können eine Reihe von Hardwaredefekten erkennen.Nachdem ein Hardwaredefekt erkannt wurde, sind die Geräte gesperrt. Die genauenFehlerreaktionen und Behebungsmaßnahmen finden Sie im Kapitel "Fehlerliste".
Ein Hardwaredefekt führt dazu, dass in den Prozesseingangsdaten im Statuswort 1 allerMOVIMOT® der Fehler 91 eingeblendet wird. Die LED "SYS-F" am MQD-Modul blinktdann gleichmäßig.
Der genaue Fehlercode kann über die Diagnose-Schnittstelle in MOVITOOLS im Statusder MQD angezeigt werden. Im IPOS-Programm kann der Fehlercode mit dem Befehl"GETSYS" gelesen und verarbeitet werden.
DeviceNet Time-out
Die Timeoutzeit wird vom Master nach dem Verbindungsaufbau eingestellt. In der De-viceNet-Spezifikation wird hier nicht von einer Timeoutzeit, sondern von einer ExpectedPacket Rate gesprochen. Die Expected Packet Rate errechnet sich aus der Timeoutzeitmit folgender Formel:
Die Expected Packet Rate kann über das Connection Object Class (0x05), Attribute0x09 eingestellt werden. Der Wertebereich reicht von 5 ms bis 65535 ms, Step 5 ms (0ms = ausgeschaltet).
tTimeoutzeit = 4 × tExpected_Packet_Rate
00
I
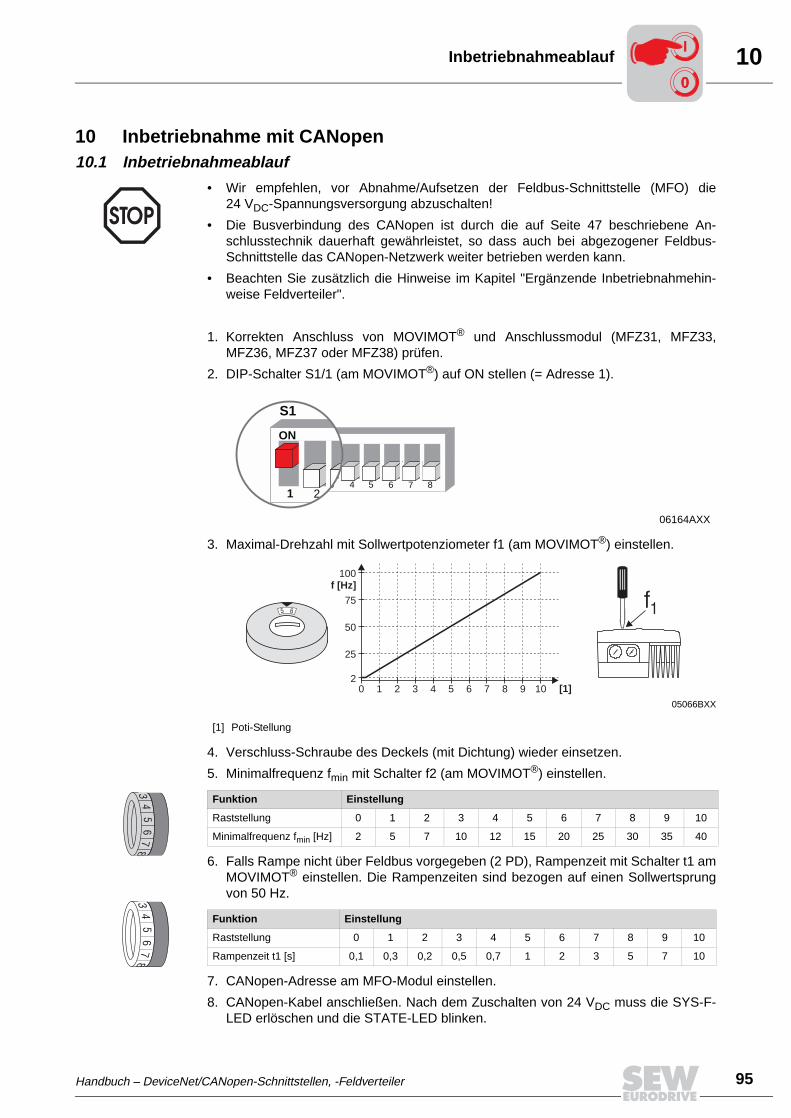
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 95
10Inbetriebnahmeablauf
10 Inbetriebnahme mit CANopen10.1 Inbetriebnahmeablauf
1. Korrekten Anschluss von MOVIMOT® und Anschlussmodul (MFZ31, MFZ33,MFZ36, MFZ37 oder MFZ38) prüfen.
2. DIP-Schalter S1/1 (am MOVIMOT®) auf ON stellen (= Adresse 1).
3. Maximal-Drehzahl mit Sollwertpotenziometer f1 (am MOVIMOT®) einstellen.
4. Verschluss-Schraube des Deckels (mit Dichtung) wieder einsetzen.
5. Minimalfrequenz fmin mit Schalter f2 (am MOVIMOT®) einstellen.
6. Falls Rampe nicht über Feldbus vorgegeben (2 PD), Rampenzeit mit Schalter t1 amMOVIMOT® einstellen. Die Rampenzeiten sind bezogen auf einen Sollwertsprungvon 50 Hz.
7. CANopen-Adresse am MFO-Modul einstellen.
8. CANopen-Kabel anschließen. Nach dem Zuschalten von 24 VDC muss die SYS-F-LED erlöschen und die STATE-LED blinken.
• Wir empfehlen, vor Abnahme/Aufsetzen der Feldbus-Schnittstelle (MFO) die24 VDC-Spannungsversorgung abzuschalten!
• Die Busverbindung des CANopen ist durch die auf Seite 47 beschriebene An-schlusstechnik dauerhaft gewährleistet, so dass auch bei abgezogener Feldbus-Schnittstelle das CANopen-Netzwerk weiter betrieben werden kann.
• Beachten Sie zusätzlich die Hinweise im Kapitel "Ergänzende Inbetriebnahmehin-weise Feldverteiler".
06164AXX
05066BXX
[1] Poti-Stellung
Funktion Einstellung
Raststellung 0 1 2 3 4 5 6 7 8 9 10
Minimalfrequenz fmin [Hz] 2 5 7 10 12 15 20 25 30 35 40
Funktion Einstellung
Raststellung 0 1 2 3 4 5 6 7 8 9 10
Rampenzeit t1 [s] 0,1 0,3 0,2 0,5 0,7 1 2 3 5 7 10
1
ON
S1
6 7 854321
ON
S1
32
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
34
56
78
34
56
78
00
I
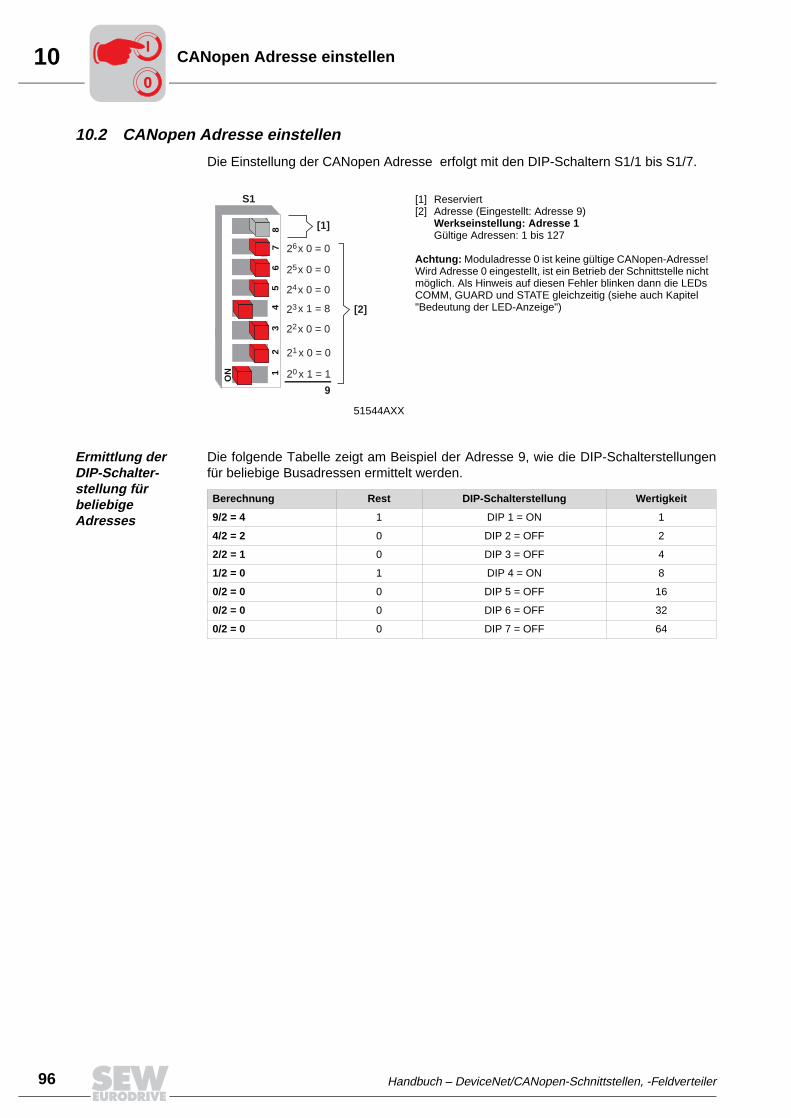
10
96 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
CANopen Adresse einstellen
10.2 CANopen Adresse einstellen
Die Einstellung der CANopen Adresse erfolgt mit den DIP-Schaltern S1/1 bis S1/7.
Ermittlung der DIP-Schalter-stellung für beliebige Adresses
Die folgende Tabelle zeigt am Beispiel der Adresse 9, wie die DIP-Schalterstellungenfür beliebige Busadressen ermittelt werden.
51544AXX
[1] Reserviert[2] Adresse (Eingestellt: Adresse 9)
Werkseinstellung: Adresse 1Gültige Adressen: 1 bis 127
Achtung: Moduladresse 0 ist keine gültige CANopen-Adresse! Wird Adresse 0 eingestellt, ist ein Betrieb der Schnittstelle nicht möglich. Als Hinweis auf diesen Fehler blinken dann die LEDs COMM, GUARD und STATE gleichzeitig (siehe auch Kapitel "Bedeutung der LED-Anzeige")
1
ON
67
54
32
8
S1
4
3
2
2
2
2
2 x 0 = 0
2 x 1 = 1
1
0
2
2
6
5
[2]
[1]
x 0 = 0
x 0 = 0
x 0 = 0
x 0 = 0
x 1 = 8
9
Berechnung Rest DIP-Schalterstellung Wertigkeit
9/2 = 4 1 DIP 1 = ON 1
4/2 = 2 0 DIP 2 = OFF 2
2/2 = 1 0 DIP 3 = OFF 4
1/2 = 0 1 DIP 4 = ON 8
0/2 = 0 0 DIP 5 = OFF 16
0/2 = 0 0 DIP 6 = OFF 32
0/2 = 0 0 DIP 7 = OFF 64
00
I
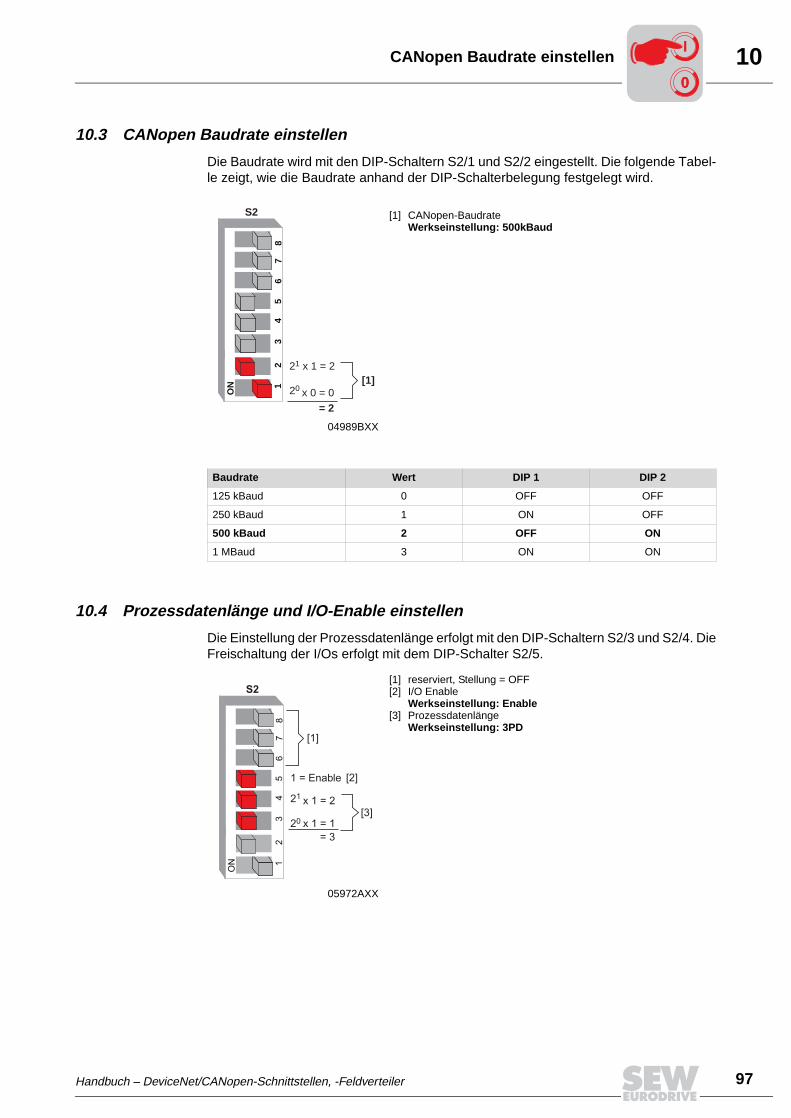
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 97
10CANopen Baudrate einstellen
10.3 CANopen Baudrate einstellen
Die Baudrate wird mit den DIP-Schaltern S2/1 und S2/2 eingestellt. Die folgende Tabel-le zeigt, wie die Baudrate anhand der DIP-Schalterbelegung festgelegt wird.
10.4 Prozessdatenlänge und I/O-Enable einstellen
Die Einstellung der Prozessdatenlänge erfolgt mit den DIP-Schaltern S2/3 und S2/4. DieFreischaltung der I/Os erfolgt mit dem DIP-Schalter S2/5.
04989BXX
[1] CANopen-BaudrateWerkseinstellung: 500kBaud
Baudrate Wert DIP 1 DIP 2
125 kBaud 0 OFF OFF
250 kBaud 1 ON OFF
500 kBaud 2 OFF ON
1 MBaud 3 ON ON
1
ON
67
54
32
8
S2
2 x 1 = 2
2 x 0 = 0
1
0[1]
= 2
05972AXX
[1] reserviert, Stellung = OFF[2] I/O Enable
Werkseinstellung: Enable [3] Prozessdatenlänge
Werkseinstellung: 3PD
1
ON
67
54
32
8
S2
1 = Enable
x 1 = 2
2 x 1 = 10
21
[1]
= 3
[3]
[2]
00
I
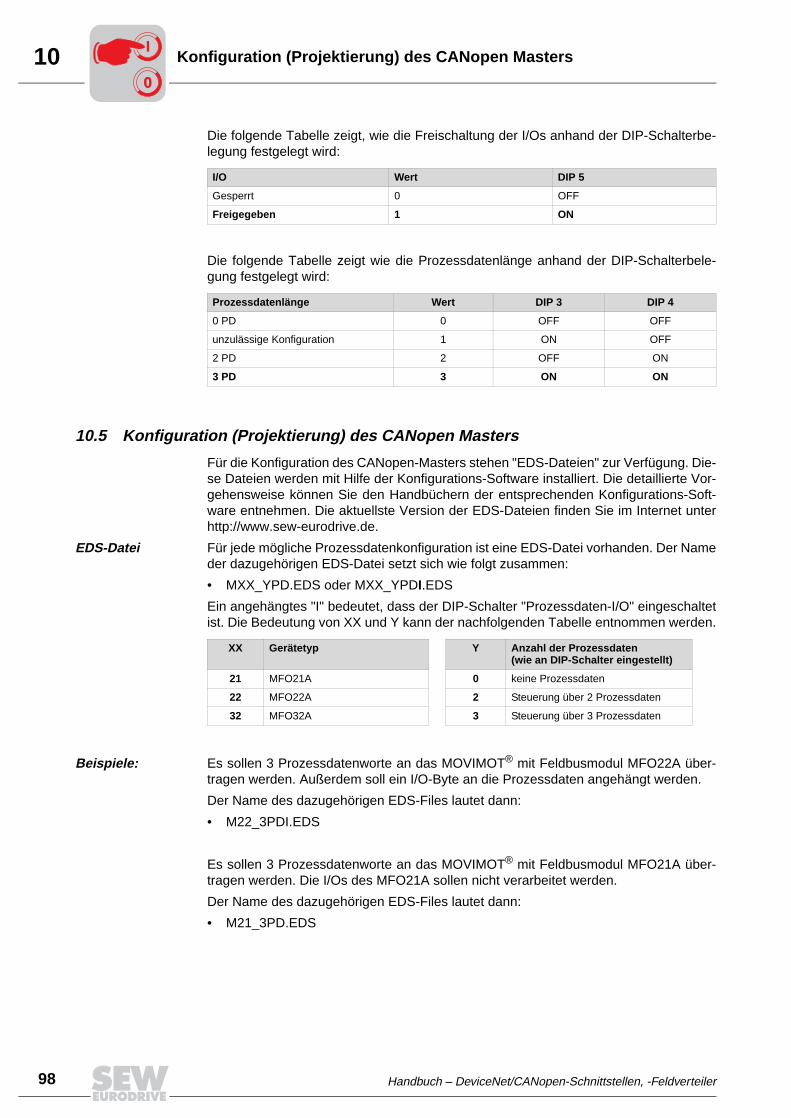
10
98 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Konfiguration (Projektierung) des CANopen Masters
Die folgende Tabelle zeigt, wie die Freischaltung der I/Os anhand der DIP-Schalterbe-legung festgelegt wird:
Die folgende Tabelle zeigt wie die Prozessdatenlänge anhand der DIP-Schalterbele-gung festgelegt wird:
10.5 Konfiguration (Projektierung) des CANopen Masters
Für die Konfiguration des CANopen-Masters stehen "EDS-Dateien" zur Verfügung. Die-se Dateien werden mit Hilfe der Konfigurations-Software installiert. Die detaillierte Vor-gehensweise können Sie den Handbüchern der entsprechenden Konfigurations-Soft-ware entnehmen. Die aktuellste Version der EDS-Dateien finden Sie im Internet unterhttp://www.sew-eurodrive.de.
EDS-Datei Für jede mögliche Prozessdatenkonfiguration ist eine EDS-Datei vorhanden. Der Nameder dazugehörigen EDS-Datei setzt sich wie folgt zusammen:
• MXX_YPD.EDS oder MXX_YPDI.EDS
Ein angehängtes "I" bedeutet, dass der DIP-Schalter "Prozessdaten-I/O" eingeschaltetist. Die Bedeutung von XX und Y kann der nachfolgenden Tabelle entnommen werden.
Beispiele: Es sollen 3 Prozessdatenworte an das MOVIMOT® mit Feldbusmodul MFO22A über-tragen werden. Außerdem soll ein I/O-Byte an die Prozessdaten angehängt werden.
Der Name des dazugehörigen EDS-Files lautet dann:
• M22_3PDI.EDS
Es sollen 3 Prozessdatenworte an das MOVIMOT® mit Feldbusmodul MFO21A über-tragen werden. Die I/Os des MFO21A sollen nicht verarbeitet werden.
Der Name des dazugehörigen EDS-Files lautet dann:
• M21_3PD.EDS
I/O Wert DIP 5
Gesperrt 0 OFF
Freigegeben 1 ON
Prozessdatenlänge Wert DIP 3 DIP 4
0 PD 0 OFF OFF
unzulässige Konfiguration 1 ON OFF
2 PD 2 OFF ON
3 PD 3 ON ON
XX Gerätetyp Y Anzahl der Prozessdaten(wie an DIP-Schalter eingestellt)
21 MFO21A 0 keine Prozessdaten
22 MFO22A 2 Steuerung über 2 Prozessdaten
32 MFO32A 3 Steuerung über 3 Prozessdaten
00
I
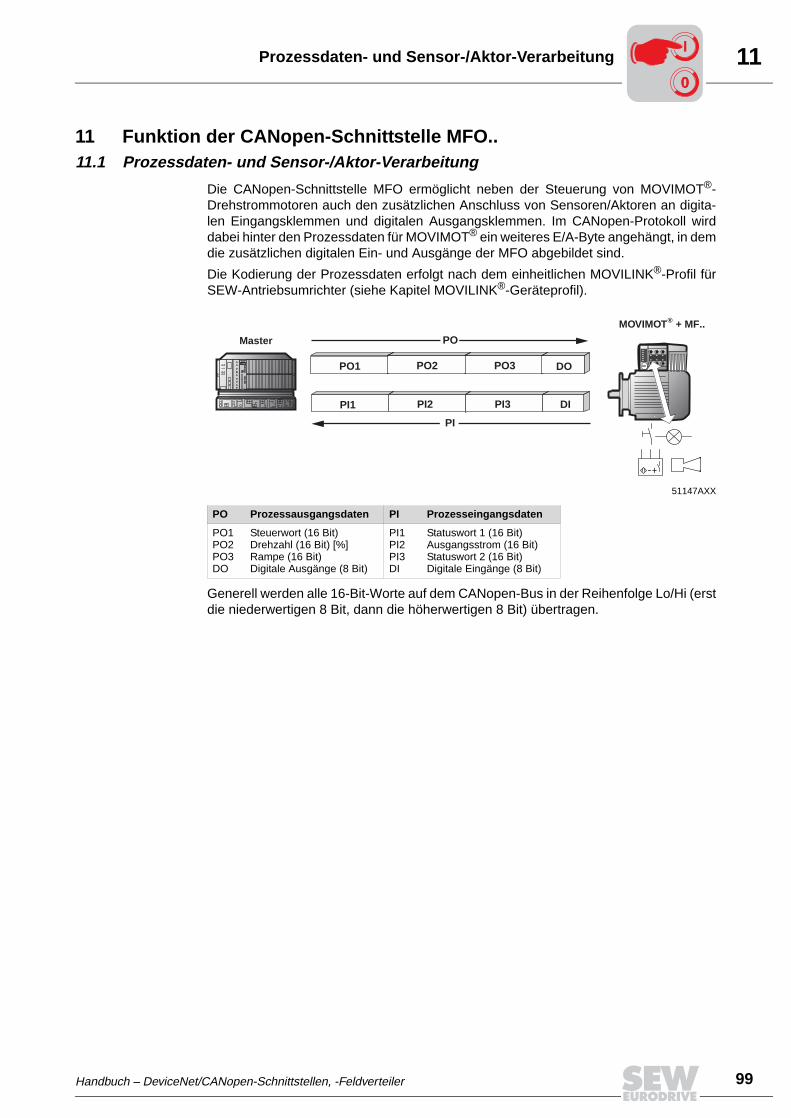
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 99
11Prozessdaten- und Sensor-/Aktor-Verarbeitung
11 Funktion der CANopen-Schnittstelle MFO..11.1 Prozessdaten- und Sensor-/Aktor-Verarbeitung
Die CANopen-Schnittstelle MFO ermöglicht neben der Steuerung von MOVIMOT®-Drehstrommotoren auch den zusätzlichen Anschluss von Sensoren/Aktoren an digita-len Eingangsklemmen und digitalen Ausgangsklemmen. Im CANopen-Protokoll wirddabei hinter den Prozessdaten für MOVIMOT® ein weiteres E/A-Byte angehängt, in demdie zusätzlichen digitalen Ein- und Ausgänge der MFO abgebildet sind.
Die Kodierung der Prozessdaten erfolgt nach dem einheitlichen MOVILINK®-Profil fürSEW-Antriebsumrichter (siehe Kapitel MOVILINK®-Geräteprofil).
Generell werden alle 16-Bit-Worte auf dem CANopen-Bus in der Reihenfolge Lo/Hi (erstdie niederwertigen 8 Bit, dann die höherwertigen 8 Bit) übertragen.
51147AXX
PO Prozessausgangsdaten PI Prozesseingangsdaten
PO1 Steuerwort (16 Bit)PO2 Drehzahl (16 Bit) [%]PO3 Rampe (16 Bit)DO Digitale Ausgänge (8 Bit)
PI1 Statuswort 1 (16 Bit)PI2 Ausgangsstrom (16 Bit)PI3 Statuswort 2 (16 Bit)DI Digitale Eingänge (8 Bit)
MOVIMOT + MF..®
PO1 PO2 PO3
Master
PI1 PI2 PI3
PO
PI
DO
DI
-+
00
I
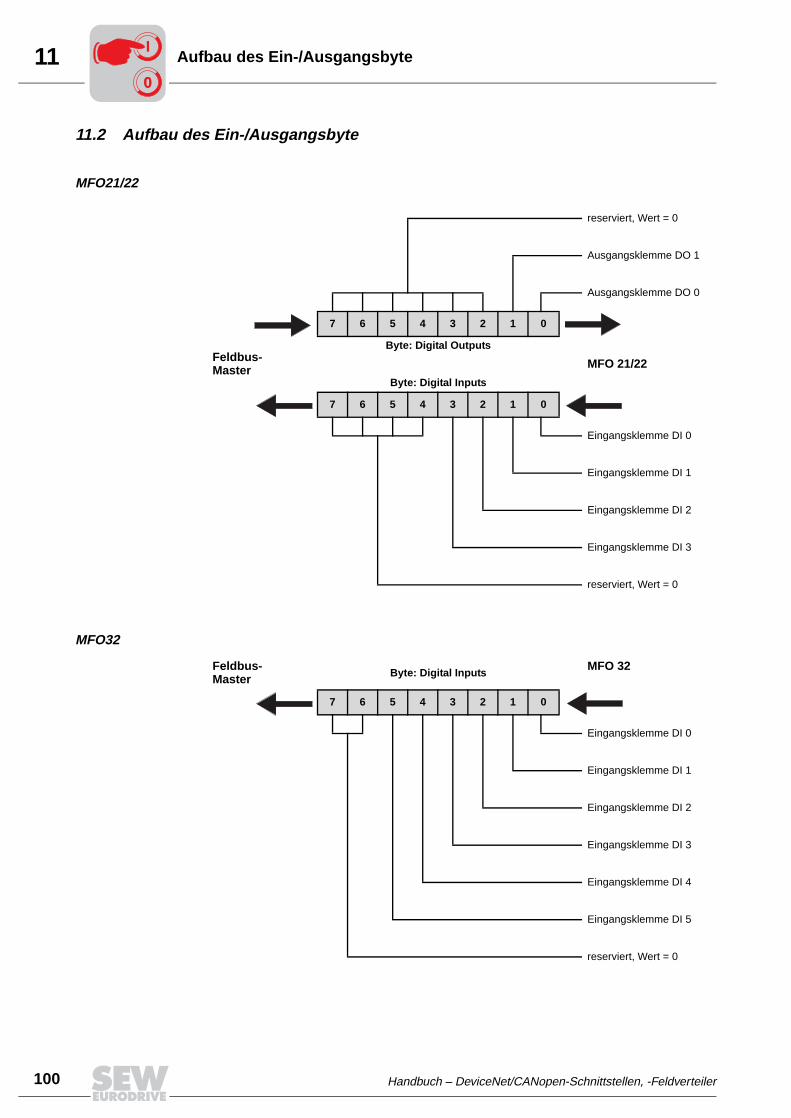
11
100 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Aufbau des Ein-/Ausgangsbyte
11.2 Aufbau des Ein-/Ausgangsbyte
MFO21/22
MFO32
reserviert, Wert = 0
Ausgangsklemme DO 1
Ausgangsklemme DO 0
7 6 5 4 3 2 1 0
Feldbus-Master
Byte: Digital Outputs
MFO 21/22
Byte: Digital Inputs
7 6 5 4 3 2 1 0
Eingangsklemme DI 0
Eingangsklemme DI 1
Eingangsklemme DI 2
Eingangsklemme DI 3
reserviert, Wert = 0
Feldbus-Master Byte: Digital Inputs
MFO 32
7 6 5 4 3 2 1 0
Eingangsklemme DI 0
Eingangsklemme DI 1
Eingangsklemme DI 2
Eingangsklemme DI 3
Eingangsklemme DI 4
Eingangsklemme DI 5
reserviert, Wert = 0
00
I
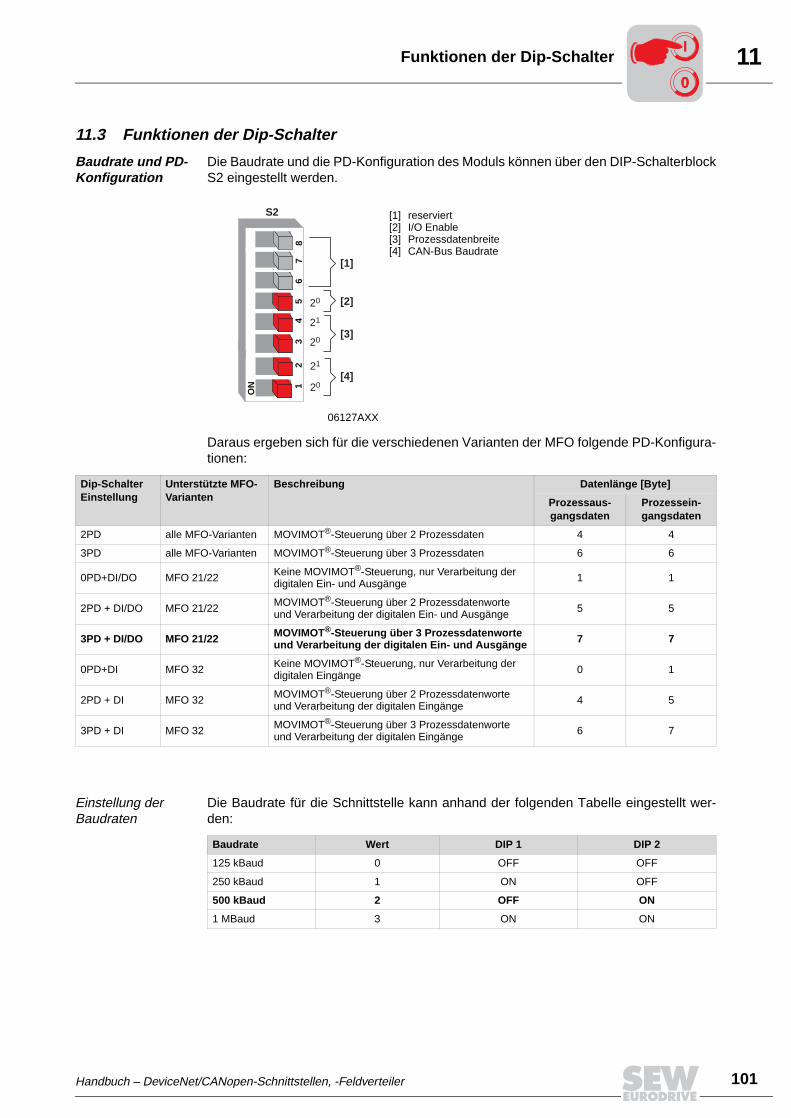
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 101
11Funktionen der Dip-Schalter
11.3 Funktionen der Dip-Schalter
Baudrate und PD-Konfiguration
Die Baudrate und die PD-Konfiguration des Moduls können über den DIP-SchalterblockS2 eingestellt werden.
Daraus ergeben sich für die verschiedenen Varianten der MFO folgende PD-Konfigura-tionen:
Einstellung der Baudraten
Die Baudrate für die Schnittstelle kann anhand der folgenden Tabelle eingestellt wer-den:
06127AXX
[1] reserviert[2] I/O Enable[3] Prozessdatenbreite[4] CAN-Bus Baudrate
1
ON
67
54
32
8
S2
0
1
0
2
2
2
2
2
1
0
[1]
[2]
[3]
[4]
Dip-Schalter Einstellung
Unterstützte MFO-Varianten
Beschreibung Datenlänge [Byte]
Prozessaus-gangsdaten
Prozessein-gangsdaten
2PD alle MFO-Varianten MOVIMOT®-Steuerung über 2 Prozessdaten 4 4
3PD alle MFO-Varianten MOVIMOT®-Steuerung über 3 Prozessdaten 6 6
0PD+DI/DO MFO 21/22 Keine MOVIMOT®-Steuerung, nur Verarbeitung der digitalen Ein- und Ausgänge 1 1
2PD + DI/DO MFO 21/22 MOVIMOT®-Steuerung über 2 Prozessdatenworte und Verarbeitung der digitalen Ein- und Ausgänge 5 5
3PD + DI/DO MFO 21/22 MOVIMOT®-Steuerung über 3 Prozessdatenworte und Verarbeitung der digitalen Ein- und Ausgänge 7 7
0PD+DI MFO 32 Keine MOVIMOT®-Steuerung, nur Verarbeitung der digitalen Eingänge 0 1
2PD + DI MFO 32 MOVIMOT®-Steuerung über 2 Prozessdatenworte und Verarbeitung der digitalen Eingänge 4 5
3PD + DI MFO 32 MOVIMOT®-Steuerung über 3 Prozessdatenworte und Verarbeitung der digitalen Eingänge 6 7
Baudrate Wert DIP 1 DIP 2
125 kBaud 0 OFF OFF
250 kBaud 1 ON OFF
500 kBaud 2 OFF ON
1 MBaud 3 ON ON
00
I
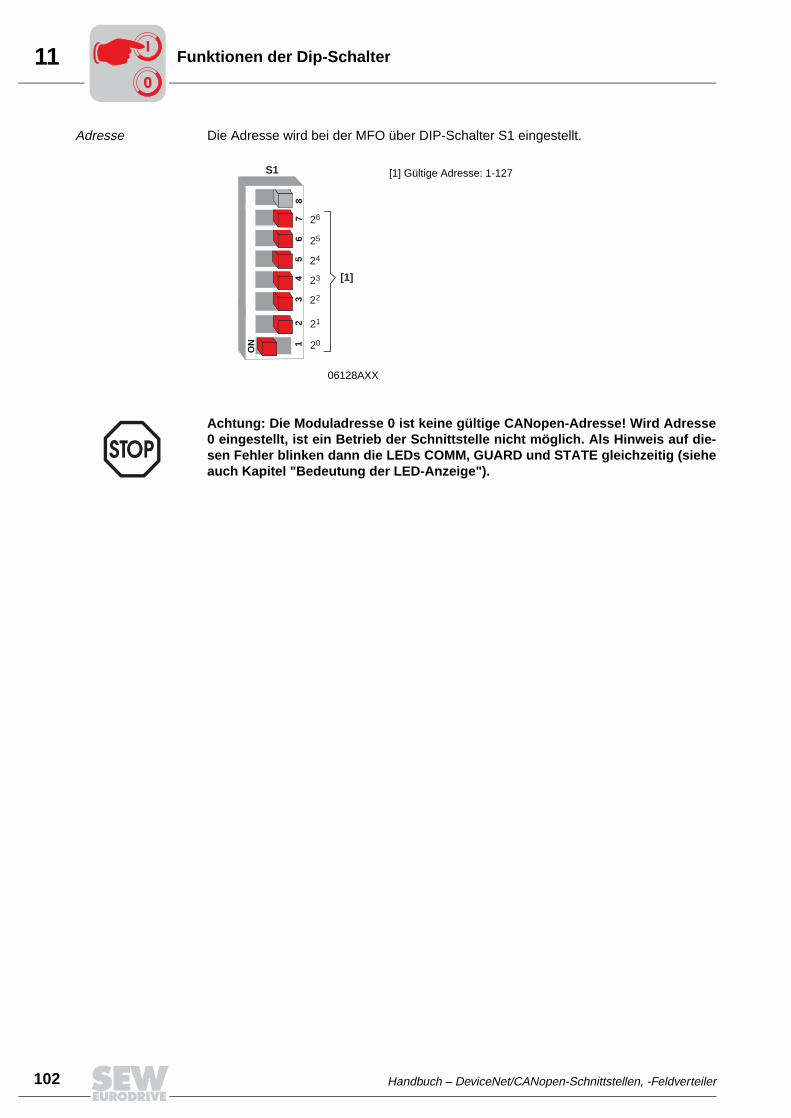
11
102 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Funktionen der Dip-Schalter
Adresse Die Adresse wird bei der MFO über DIP-Schalter S1 eingestellt.
06128AXX
[1] Gültige Adresse: 1-127
1
ON
67
54
32
8
S1
4
3
2
2
2
2
2
2
1
0
2
2
6
5
[1]
Achtung: Die Moduladresse 0 ist keine gültige CANopen-Adresse! Wird Adresse0 eingestellt, ist ein Betrieb der Schnittstelle nicht möglich. Als Hinweis auf die-sen Fehler blinken dann die LEDs COMM, GUARD und STATE gleichzeitig (sieheauch Kapitel "Bedeutung der LED-Anzeige").
00
I
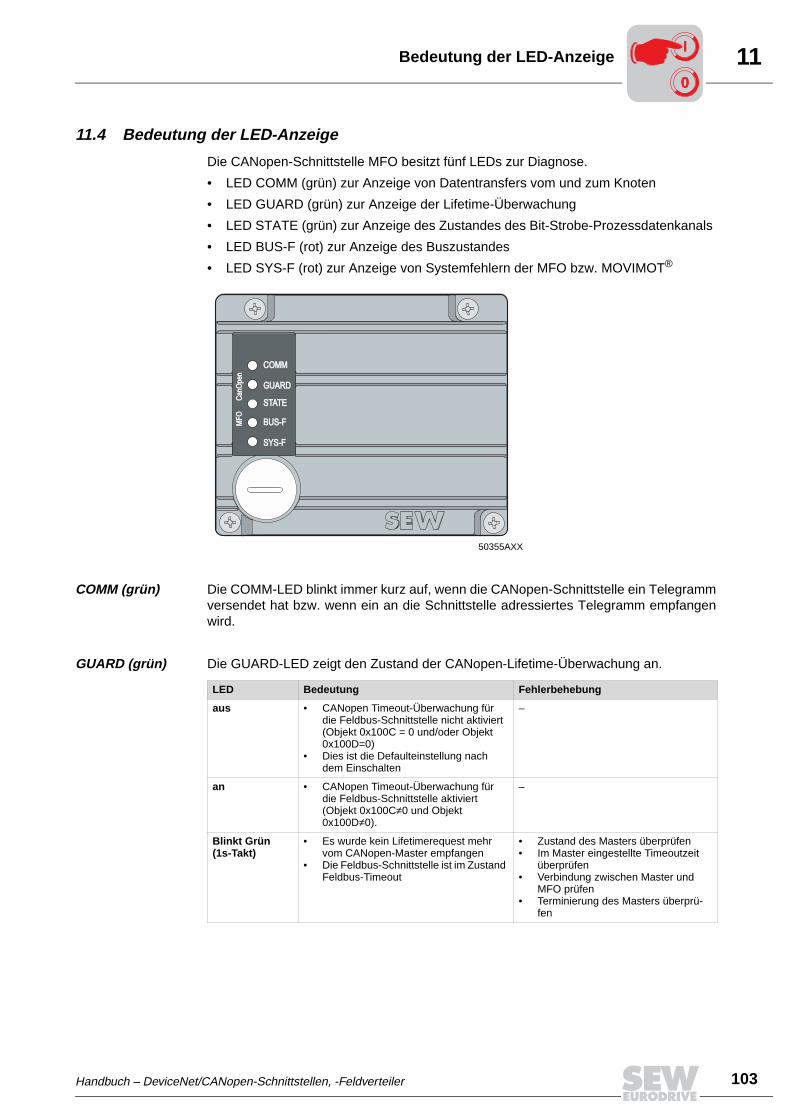
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 103
11Bedeutung der LED-Anzeige
11.4 Bedeutung der LED-Anzeige
Die CANopen-Schnittstelle MFO besitzt fünf LEDs zur Diagnose.
• LED COMM (grün) zur Anzeige von Datentransfers vom und zum Knoten
• LED GUARD (grün) zur Anzeige der Lifetime-Überwachung
• LED STATE (grün) zur Anzeige des Zustandes des Bit-Strobe-Prozessdatenkanals
• LED BUS-F (rot) zur Anzeige des Buszustandes
• LED SYS-F (rot) zur Anzeige von Systemfehlern der MFO bzw. MOVIMOT®
COMM (grün) Die COMM-LED blinkt immer kurz auf, wenn die CANopen-Schnittstelle ein Telegrammversendet hat bzw. wenn ein an die Schnittstelle adressiertes Telegramm empfangenwird.
GUARD (grün) Die GUARD-LED zeigt den Zustand der CANopen-Lifetime-Überwachung an.
50355AXX
MF
O
C
anO
pen
MF
O
C
anO
pen
SYS-FSYS-F
BUS-FBUS-F
STATESTATE
GUARDGUARD
COMMCOMM
LED Bedeutung Fehlerbehebung
aus • CANopen Timeout-Überwachung für die Feldbus-Schnittstelle nicht aktiviert (Objekt 0x100C = 0 und/oder Objekt 0x100D=0)
• Dies ist die Defaulteinstellung nach dem Einschalten
–
an • CANopen Timeout-Überwachung für die Feldbus-Schnittstelle aktiviert (Objekt 0x100C≠0 und Objekt 0x100D≠0).
–
Blinkt Grün (1s-Takt)
• Es wurde kein Lifetimerequest mehr vom CANopen-Master empfangen
• Die Feldbus-Schnittstelle ist im Zustand Feldbus-Timeout
• Zustand des Masters überprüfen• Im Master eingestellte Timeoutzeit
überprüfen• Verbindung zwischen Master und
MFO prüfen• Terminierung des Masters überprü-
fen
00
I
11
104 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Bedeutung der LED-Anzeige
STATE (grün) Die STATE-LED zeigt den aktuellen NMT-Zustand Feldbus-Schnittstelle an. Die Feld-bus-Schnittstelle unterstützt den Minimal-BOOTUP, d.h. es existieren die Zustände"pre-operational", "operational" und "stopped".
BUS-F (rot) Die BUS-F-LED zeigt den physikalischen Zustand des Busknotens an. Die Funktionali-tät wird in folgender Tabelle beschrieben.
SYS-F (rot) Die SYS-F LED ist in den PD-Konfigurationen 0PD + DI/DO und 0PD + DI generell ohneFunktion.
LED Zustand Bedeutung
Blinkt (1s-Takt)
Pre-Operational • Das Gerät kann nur (mit SDOs) parametriert werden, Prozessdaten (PDOs) werden ignoriert
• Dieser Zustand wird nach dem Einschalten angenommen
an Operational • Es werden PDOs, SDOs und NMT-Dienste verarbeitet
aus Stopped • Das Gerät ignoriert alle SDOs und PDOs• Es werden nur noch Telegramme des NMT bearbeitet
LED Status Bedeutung Fehlerbehebung
Aus Error-Aktiv-State • Die Anzahl der Busfehler bewegt sich im normalen Bereich
–
BlinktRot(1s-Takt)
Error-Passiv-State • Die Anzahl der physikalische Busfehler ist zu hoch
• Es werden keine Error-Telegramme mehr aktiv auf den Bus geschrieben
• Falls dieser Fehler im Betrieb (d.h. bei laufender Kommuni-kation) auftritt, müssen die Verdrahtung und die Abschlusswiderstände über-prüft werden
Rot BusOff-State • Die Anzahl der physikalischen Busfehler ist trotz des Umschal-tens in den Error-Passiv-State weiter angewachsen
• Der Zugriff auf den Bus wird abgeschaltet
• Überprüfung der Verdrah-tung, Abschlusswiderstände, Baudrate und Adresse
LED Bedeutung Fehlerbehebung
Aus • Normaler Betriebszustand der MFO und MOVIMOT®
–
Blinkt1x
• MFO Betriebszustand OK, MOVIMOT® meldet Fehler
• Werten Sie die Fehlernummer im MOVIMOT®-Statuswort 1 in der Steuerung aus
• MOVIMOT® über die Steuerung (Reset-Bit im Steuerwort 1) zurücksetzen
• Weitere Informationen finden Sie in der Betriebsanleitung MOVIMOT®
Blinkt2x
• MOVIMOT® reagiert nicht auf Soll-werte vom CANopen-Master, da PD-Daten nicht freigegeben sind
• Überprüfen Sie die DIP-Schalter S1/1 bis S1/4 im MOVIMOT®
• Stellen Sie die RS-485 Adresse 1 ein, damit die PO-Daten freigegeben werden
Ein • Kommunikationsverbindung zwi-schen MFO und MOVIMOT® ist gestört bzw. unterbrochen
• Überprüfen Sie die elektrische Verbindung zwi-schen MFO und MOVIMOT® (Klemmen RS+ und RS-)
• Siehe Kapitel "Elektrische Installation" und "Installationsplanung unter EMV-Gesichtspunk-ten"
• Wartungs-Schalter am Feldverteiler steht auf OFF
• Prüfen Sie die Einstellung des Wartungs-Schalters am Feldverteiler
00
I
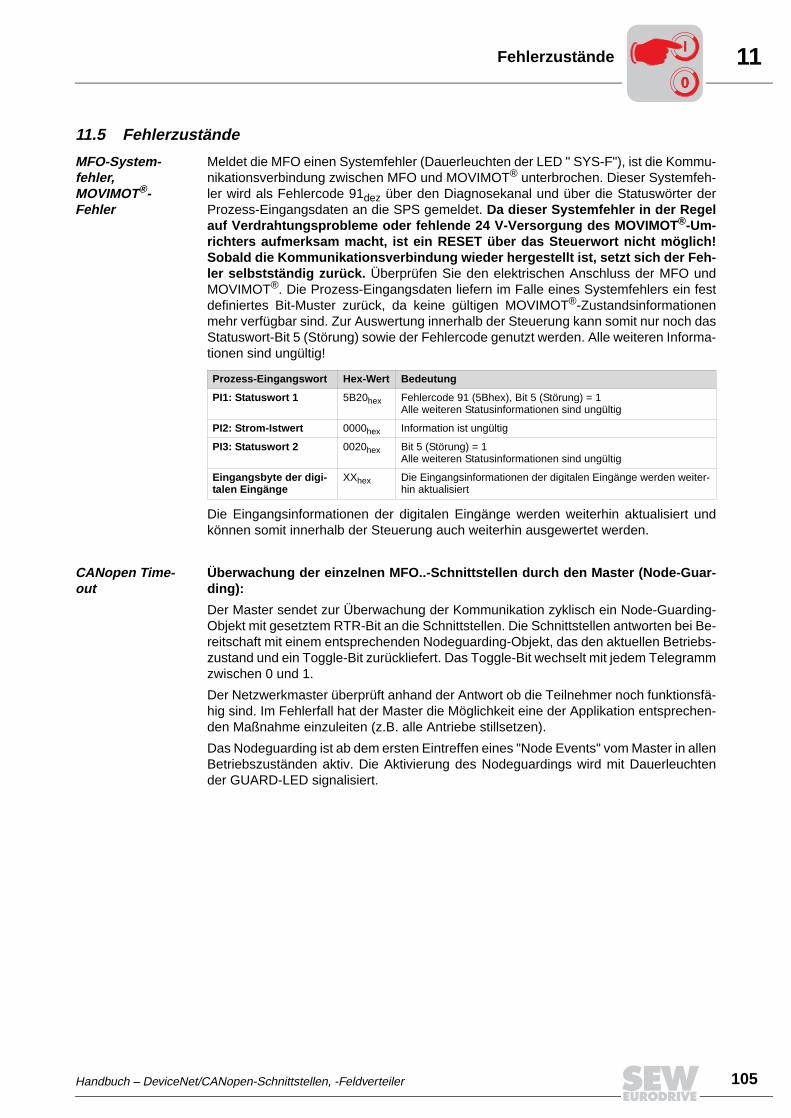
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 105
11Fehlerzustände
11.5 Fehlerzustände
MFO-System-fehler, MOVIMOT®- Fehler
Meldet die MFO einen Systemfehler (Dauerleuchten der LED " SYS-F"), ist die Kommu-nikationsverbindung zwischen MFO und MOVIMOT® unterbrochen. Dieser Systemfeh-ler wird als Fehlercode 91dez über den Diagnosekanal und über die Statuswörter derProzess-Eingangsdaten an die SPS gemeldet. Da dieser Systemfehler in der Regelauf Verdrahtungsprobleme oder fehlende 24 V-Versorgung des MOVIMOT®-Um-richters aufmerksam macht, ist ein RESET über das Steuerwort nicht möglich!Sobald die Kommunikationsverbindung wieder hergestellt ist, setzt sich der Feh-ler selbstständig zurück. Überprüfen Sie den elektrischen Anschluss der MFO undMOVIMOT®. Die Prozess-Eingangsdaten liefern im Falle eines Systemfehlers ein festdefiniertes Bit-Muster zurück, da keine gültigen MOVIMOT®-Zustandsinformationenmehr verfügbar sind. Zur Auswertung innerhalb der Steuerung kann somit nur noch dasStatuswort-Bit 5 (Störung) sowie der Fehlercode genutzt werden. Alle weiteren Informa-tionen sind ungültig!
Die Eingangsinformationen der digitalen Eingänge werden weiterhin aktualisiert undkönnen somit innerhalb der Steuerung auch weiterhin ausgewertet werden.
CANopen Time-out
Überwachung der einzelnen MFO..-Schnittstellen durch den Master (Node-Guar-ding):
Der Master sendet zur Überwachung der Kommunikation zyklisch ein Node-Guarding-Objekt mit gesetztem RTR-Bit an die Schnittstellen. Die Schnittstellen antworten bei Be-reitschaft mit einem entsprechenden Nodeguarding-Objekt, das den aktuellen Betriebs-zustand und ein Toggle-Bit zurückliefert. Das Toggle-Bit wechselt mit jedem Telegrammzwischen 0 und 1.
Der Netzwerkmaster überprüft anhand der Antwort ob die Teilnehmer noch funktionsfä-hig sind. Im Fehlerfall hat der Master die Möglichkeit eine der Applikation entsprechen-den Maßnahme einzuleiten (z.B. alle Antriebe stillsetzen).
Das Nodeguarding ist ab dem ersten Eintreffen eines "Node Events" vom Master in allenBetriebszuständen aktiv. Die Aktivierung des Nodeguardings wird mit Dauerleuchtender GUARD-LED signalisiert.
Prozess-Eingangswort Hex-Wert Bedeutung
PI1: Statuswort 1 5B20hex Fehlercode 91 (5Bhex), Bit 5 (Störung) = 1Alle weiteren Statusinformationen sind ungültig
PI2: Strom-Istwert 0000hex Information ist ungültig
PI3: Statuswort 2 0020hex Bit 5 (Störung) = 1Alle weiteren Statusinformationen sind ungültig
Eingangsbyte der digi-talen Eingänge
XXhex Die Eingangsinformationen der digitalen Eingänge werden weiter-hin aktualisiert
00
I
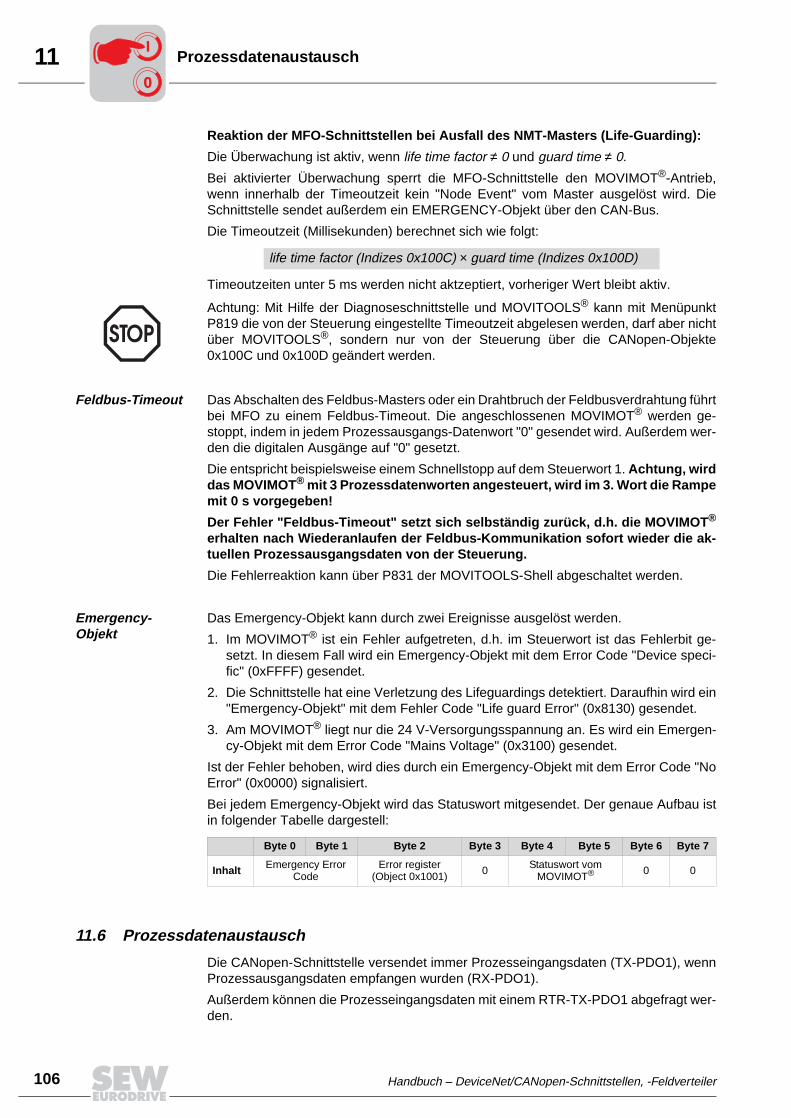
11
106 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Prozessdatenaustausch
Reaktion der MFO-Schnittstellen bei Ausfall des NMT-Masters (Life-Guarding):
Die Überwachung ist aktiv, wenn life time factor ≠ 0 und guard time ≠ 0.
Bei aktivierter Überwachung sperrt die MFO-Schnittstelle den MOVIMOT®-Antrieb,wenn innerhalb der Timeoutzeit kein "Node Event" vom Master ausgelöst wird. DieSchnittstelle sendet außerdem ein EMERGENCY-Objekt über den CAN-Bus.
Die Timeoutzeit (Millisekunden) berechnet sich wie folgt:
Timeoutzeiten unter 5 ms werden nicht aktzeptiert, vorheriger Wert bleibt aktiv.
Feldbus-Timeout Das Abschalten des Feldbus-Masters oder ein Drahtbruch der Feldbusverdrahtung führtbei MFO zu einem Feldbus-Timeout. Die angeschlossenen MOVIMOT® werden ge-stoppt, indem in jedem Prozessausgangs-Datenwort "0" gesendet wird. Außerdem wer-den die digitalen Ausgänge auf "0" gesetzt.
Die entspricht beispielsweise einem Schnellstopp auf dem Steuerwort 1. Achtung, wirddas MOVIMOT® mit 3 Prozessdatenworten angesteuert, wird im 3. Wort die Rampemit 0 s vorgegeben!
Der Fehler "Feldbus-Timeout" setzt sich selbständig zurück, d.h. die MOVIMOT®
erhalten nach Wiederanlaufen der Feldbus-Kommunikation sofort wieder die ak-tuellen Prozessausgangsdaten von der Steuerung.
Die Fehlerreaktion kann über P831 der MOVITOOLS-Shell abgeschaltet werden.
Emergency-Objekt
Das Emergency-Objekt kann durch zwei Ereignisse ausgelöst werden.
1. Im MOVIMOT® ist ein Fehler aufgetreten, d.h. im Steuerwort ist das Fehlerbit ge-setzt. In diesem Fall wird ein Emergency-Objekt mit dem Error Code "Device speci-fic" (0xFFFF) gesendet.
2. Die Schnittstelle hat eine Verletzung des Lifeguardings detektiert. Daraufhin wird ein"Emergency-Objekt" mit dem Fehler Code "Life guard Error" (0x8130) gesendet.
3. Am MOVIMOT® liegt nur die 24 V-Versorgungsspannung an. Es wird ein Emergen-cy-Objekt mit dem Error Code "Mains Voltage" (0x3100) gesendet.
Ist der Fehler behoben, wird dies durch ein Emergency-Objekt mit dem Error Code "NoError" (0x0000) signalisiert.
Bei jedem Emergency-Objekt wird das Statuswort mitgesendet. Der genaue Aufbau istin folgender Tabelle dargestell:
11.6 Prozessdatenaustausch
Die CANopen-Schnittstelle versendet immer Prozesseingangsdaten (TX-PDO1), wennProzessausgangsdaten empfangen wurden (RX-PDO1).
Außerdem können die Prozesseingangsdaten mit einem RTR-TX-PDO1 abgefragt wer-den.
life time factor (Indizes 0x100C) × guard time (Indizes 0x100D)
Achtung: Mit Hilfe der Diagnoseschnittstelle und MOVITOOLS® kann mit MenüpunktP819 die von der Steuerung eingestellte Timeoutzeit abgelesen werden, darf aber nichtüber MOVITOOLS®, sondern nur von der Steuerung über die CANopen-Objekte0x100C und 0x100D geändert werden.
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
Inhalt Emergency ErrorCode
Error register(Object 0x1001) 0 Statuswort vom
MOVIMOT® 0 0
00
I
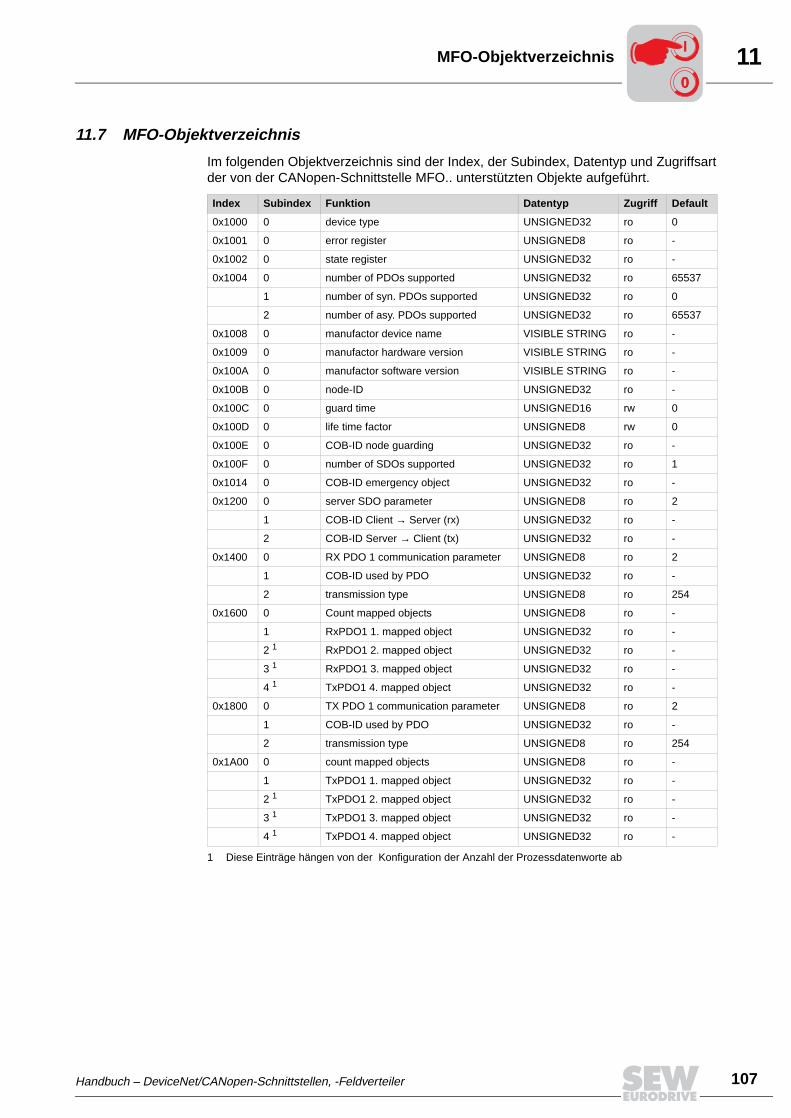
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 107
11MFO-Objektverzeichnis
11.7 MFO-Objektverzeichnis
Im folgenden Objektverzeichnis sind der Index, der Subindex, Datentyp und Zugriffsartder von der CANopen-Schnittstelle MFO.. unterstützten Objekte aufgeführt.
Index Subindex Funktion Datentyp Zugriff Default
0x1000 0 device type UNSIGNED32 ro 0
0x1001 0 error register UNSIGNED8 ro -
0x1002 0 state register UNSIGNED32 ro -
0x1004 0 number of PDOs supported UNSIGNED32 ro 65537
1 number of syn. PDOs supported UNSIGNED32 ro 0
2 number of asy. PDOs supported UNSIGNED32 ro 65537
0x1008 0 manufactor device name VISIBLE STRING ro -
0x1009 0 manufactor hardware version VISIBLE STRING ro -
0x100A 0 manufactor software version VISIBLE STRING ro -
0x100B 0 node-ID UNSIGNED32 ro -
0x100C 0 guard time UNSIGNED16 rw 0
0x100D 0 life time factor UNSIGNED8 rw 0
0x100E 0 COB-ID node guarding UNSIGNED32 ro -
0x100F 0 number of SDOs supported UNSIGNED32 ro 1
0x1014 0 COB-ID emergency object UNSIGNED32 ro -
0x1200 0 server SDO parameter UNSIGNED8 ro 2
1 COB-ID Client → Server (rx) UNSIGNED32 ro -
2 COB-ID Server → Client (tx) UNSIGNED32 ro -
0x1400 0 RX PDO 1 communication parameter UNSIGNED8 ro 2
1 COB-ID used by PDO UNSIGNED32 ro -
2 transmission type UNSIGNED8 ro 254
0x1600 0 Count mapped objects UNSIGNED8 ro -
1 RxPDO1 1. mapped object UNSIGNED32 ro -
2 1
1 Diese Einträge hängen von der Konfiguration der Anzahl der Prozessdatenworte ab
RxPDO1 2. mapped object UNSIGNED32 ro -
3 1 RxPDO1 3. mapped object UNSIGNED32 ro -
4 1 TxPDO1 4. mapped object UNSIGNED32 ro -
0x1800 0 TX PDO 1 communication parameter UNSIGNED8 ro 2
1 COB-ID used by PDO UNSIGNED32 ro -
2 transmission type UNSIGNED8 ro 254
0x1A00 0 count mapped objects UNSIGNED8 ro -
1 TxPDO1 1. mapped object UNSIGNED32 ro -
2 1 TxPDO1 2. mapped object UNSIGNED32 ro -
3 1 TxPDO1 3. mapped object UNSIGNED32 ro -
4 1 TxPDO1 4. mapped object UNSIGNED32 ro -
00
I
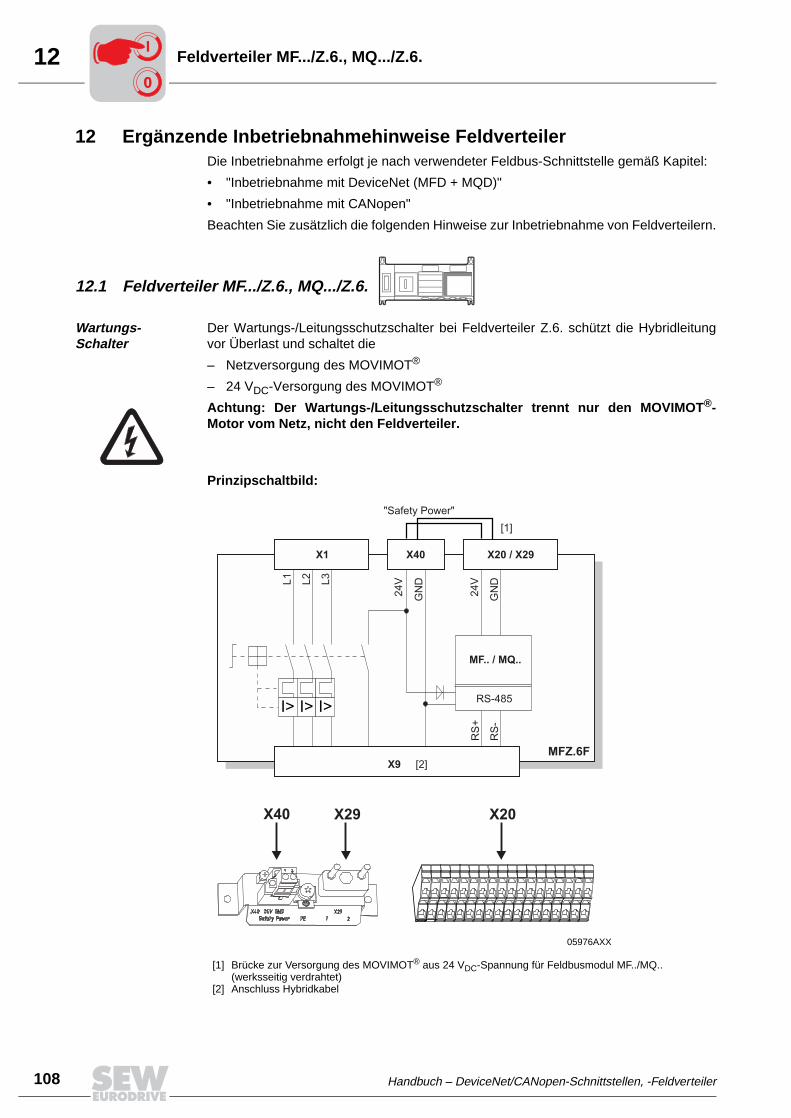
12
108 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler MF.../Z.6., MQ.../Z.6.
12 Ergänzende Inbetriebnahmehinweise FeldverteilerDie Inbetriebnahme erfolgt je nach verwendeter Feldbus-Schnittstelle gemäß Kapitel:
• "Inbetriebnahme mit DeviceNet (MFD + MQD)"
• "Inbetriebnahme mit CANopen"
Beachten Sie zusätzlich die folgenden Hinweise zur Inbetriebnahme von Feldverteilern.
12.1 Feldverteiler MF.../Z.6., MQ.../Z.6.
Wartungs-Schalter
Der Wartungs-/Leitungsschutzschalter bei Feldverteiler Z.6. schützt die Hybridleitungvor Überlast und schaltet die
– Netzversorgung des MOVIMOT®
– 24 VDC-Versorgung des MOVIMOT®
Prinzipschaltbild:
Achtung: Der Wartungs-/Leitungsschutzschalter trennt nur den MOVIMOT®-Motor vom Netz, nicht den Feldverteiler.
05976AXX
[1] Brücke zur Versorgung des MOVIMOT® aus 24 VDC-Spannung für Feldbusmodul MF../MQ..(werksseitig verdrahtet)
[2] Anschluss Hybridkabel
[1]
"Safety Power"
RS-485
X1 X20 / X29
MF.. / MQ..
X40
L1
L2
L3
24V
GN
D
24V
GN
D
RS
+
RS
-
X9 [2]MFZ.6F
X40 X29 X20
00
I
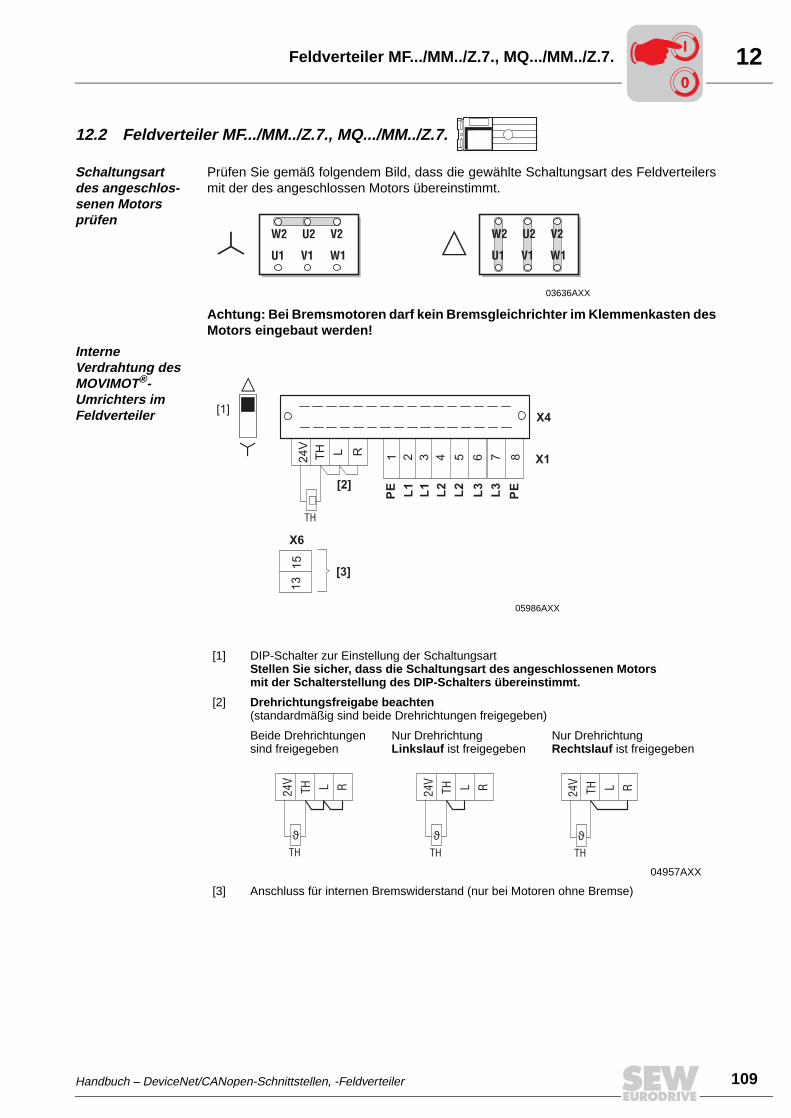
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 109
12Feldverteiler MF.../MM../Z.7., MQ.../MM../Z.7.
12.2 Feldverteiler MF.../MM../Z.7., MQ.../MM../Z.7.
Schaltungsart des angeschlos-senen Motors prüfen
Prüfen Sie gemäß folgendem Bild, dass die gewählte Schaltungsart des Feldverteilersmit der des angeschlossen Motors übereinstimmt.
Achtung: Bei Bremsmotoren darf kein Bremsgleichrichter im Klemmenkasten desMotors eingebaut werden!
Interne Verdrahtung des MOVIMOT®-Umrichters im Feldverteiler
03636AXX
U1 V1 W1
W2 U2 V2
U1 V1 W1
W2 U2 V2
05986AXX
[1] DIP-Schalter zur Einstellung der SchaltungsartStellen Sie sicher, dass die Schaltungsart des angeschlossenen Motors mit der Schalterstellung des DIP-Schalters übereinstimmt.
[2] Drehrichtungsfreigabe beachten (standardmäßig sind beide Drehrichtungen freigegeben)
Beide Drehrichtungensind freigegeben
Nur DrehrichtungLinkslauf ist freigegeben
Nur DrehrichtungRechtslauf ist freigegeben
04957AXX
[3] Anschluss für internen Bremswiderstand (nur bei Motoren ohne Bremse)
24
V
TH L R 1 2 3 4 5 6 7 8
PE
L1
L1
L2
L2
L3
L3
PE
TH
[1]
[2]
[3]
X4
X6
X1
13
15
24V
TH L R 24V
TH L R 24V
TH L R
ϑ ϑ ϑTH TH TH
00
I
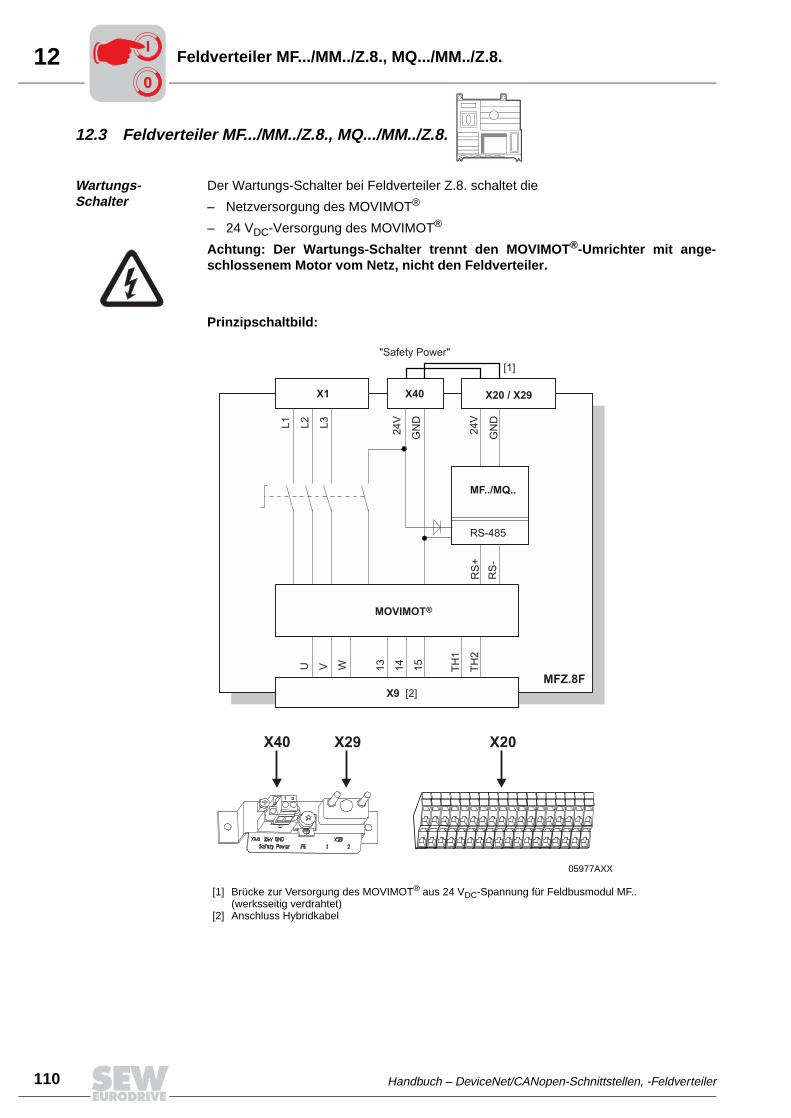
12
110 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldverteiler MF.../MM../Z.8., MQ.../MM../Z.8.
12.3 Feldverteiler MF.../MM../Z.8., MQ.../MM../Z.8.
Wartungs-Schalter
Der Wartungs-Schalter bei Feldverteiler Z.8. schaltet die
– Netzversorgung des MOVIMOT®
– 24 VDC-Versorgung des MOVIMOT®
Prinzipschaltbild:
Achtung: Der Wartungs-Schalter trennt den MOVIMOT®-Umrichter mit ange-schlossenem Motor vom Netz, nicht den Feldverteiler.
05977AXX
[1] Brücke zur Versorgung des MOVIMOT® aus 24 VDC-Spannung für Feldbusmodul MF.. (werksseitig verdrahtet)
[2] Anschluss Hybridkabel
U V W 13
14
15
TH
1
TH
2
X9 [2]
MFZ.8F
MOVIMOT®
X1 X20 / X29
L1
L2
L3
24V
GN
DMF../MQ..
RS
+
RS
-
24V
GN
D
X40
"Safety Power"
[1]
X40 X29 X20
RS-485
00
I
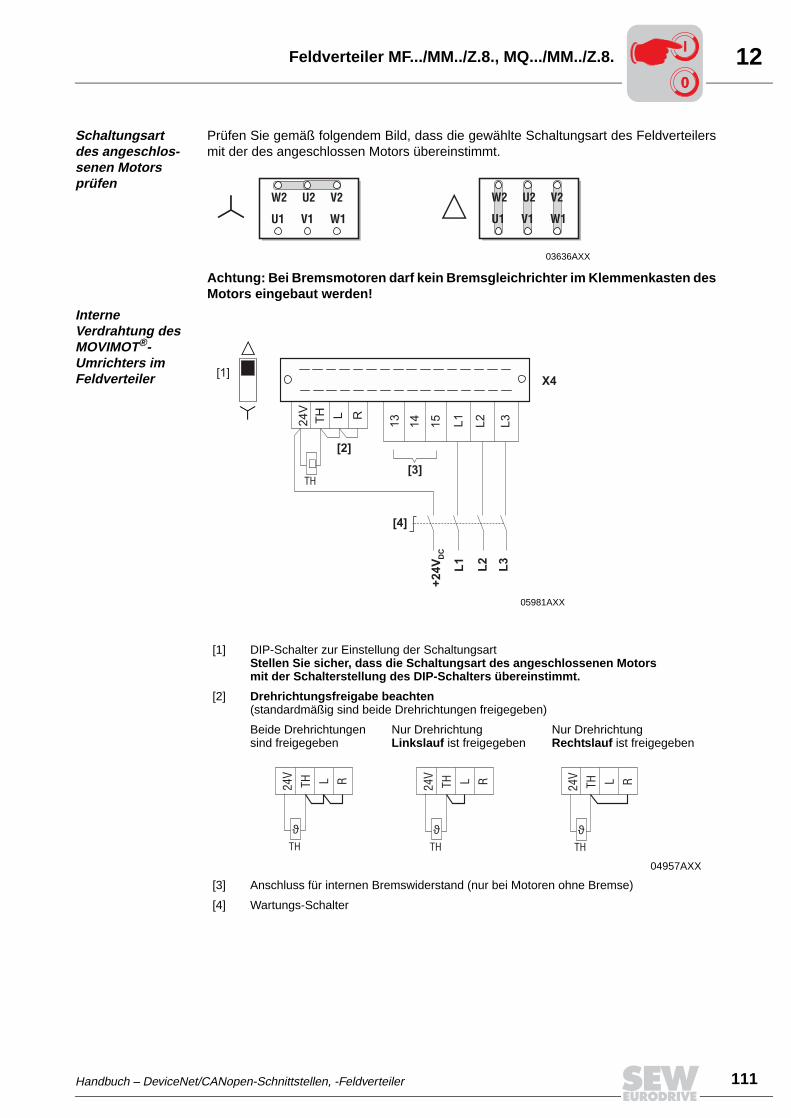
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 111
12Feldverteiler MF.../MM../Z.8., MQ.../MM../Z.8.
Schaltungsart des angeschlos-senen Motors prüfen
Prüfen Sie gemäß folgendem Bild, dass die gewählte Schaltungsart des Feldverteilersmit der des angeschlossen Motors übereinstimmt.
Achtung: Bei Bremsmotoren darf kein Bremsgleichrichter im Klemmenkasten desMotors eingebaut werden!
Interne Verdrahtung des MOVIMOT®-Umrichters im Feldverteiler
03636AXX
U1 V1 W1
W2 U2 V2
U1 V1 W1
W2 U2 V2
05981AXX
[1] DIP-Schalter zur Einstellung der SchaltungsartStellen Sie sicher, dass die Schaltungsart des angeschlossenen Motors mit der Schalterstellung des DIP-Schalters übereinstimmt.
[2] Drehrichtungsfreigabe beachten (standardmäßig sind beide Drehrichtungen freigegeben)
Beide Drehrichtungensind freigegeben
Nur DrehrichtungLinkslauf ist freigegeben
Nur DrehrichtungRechtslauf ist freigegeben
04957AXX
[3] Anschluss für internen Bremswiderstand (nur bei Motoren ohne Bremse)
[4] Wartungs-Schalter
24
V
TH L R
13
14
15
L1
L2
L3
L1
L2
L3
+2
4V
DC
TH
[4]
[1]
[2]
[3]
X4
24V
TH L R 24V
TH L R 24V
TH L R
ϑ ϑ ϑTH TH TH
00
I
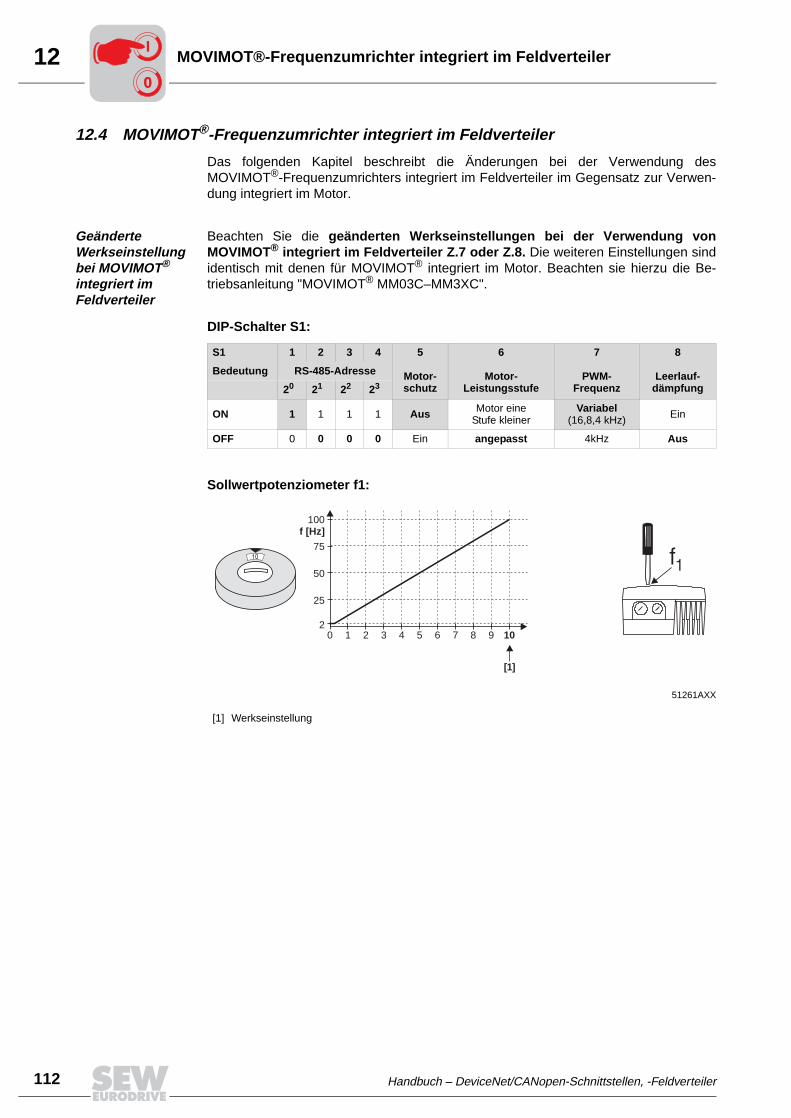
12
112 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
MOVIMOT®-Frequenzumrichter integriert im Feldverteiler
12.4 MOVIMOT®-Frequenzumrichter integriert im Feldverteiler
Das folgenden Kapitel beschreibt die Änderungen bei der Verwendung desMOVIMOT®-Frequenzumrichters integriert im Feldverteiler im Gegensatz zur Verwen-dung integriert im Motor.
Geänderte Werkseinstellung bei MOVIMOT® integriert im Feldverteiler
Beachten Sie die geänderten Werkseinstellungen bei der Verwendung vonMOVIMOT® integriert im Feldverteiler Z.7 oder Z.8. Die weiteren Einstellungen sindidentisch mit denen für MOVIMOT® integriert im Motor. Beachten sie hierzu die Be-triebsanleitung "MOVIMOT® MM03C–MM3XC".
DIP-Schalter S1:
Sollwertpotenziometer f1:
S1 1 2 3 4 5
Motor-schutz
6
Motor-Leistungsstufe
7
PWM-Frequenz
8
Leerlauf-dämpfung
Bedeutung RS-485-Adresse
20 21 22 23
ON 1 1 1 1 Aus Motor eineStufe kleiner
Variabel(16,8,4 kHz) Ein
OFF 0 0 0 0 Ein angepasst 4kHz Aus
51261AXX
[1] Werkseinstellung
1 2 3 4 5 6 7 8 9 100
100f [Hz]
2
75
25
50
10 f1
[1]
00
I
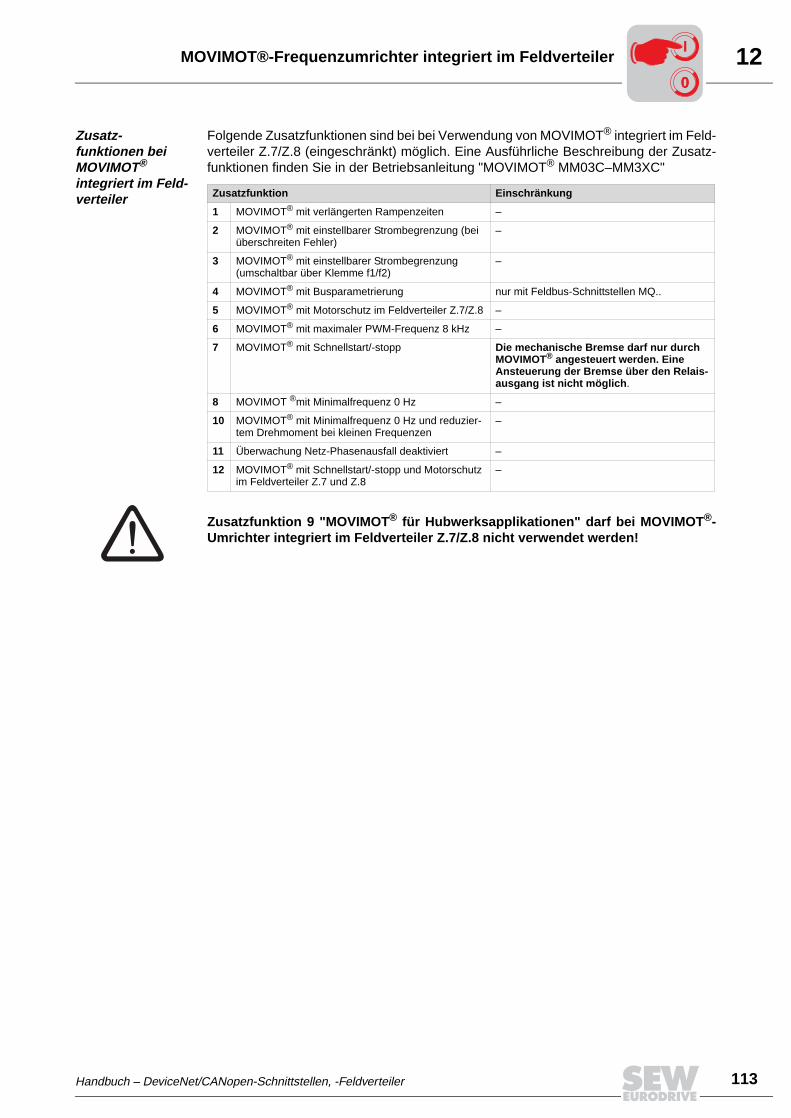
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 113
12MOVIMOT®-Frequenzumrichter integriert im Feldverteiler
Zusatz-funktionen bei MOVIMOT® integriert im Feld-verteiler
Folgende Zusatzfunktionen sind bei bei Verwendung von MOVIMOT® integriert im Feld-verteiler Z.7/Z.8 (eingeschränkt) möglich. Eine Ausführliche Beschreibung der Zusatz-funktionen finden Sie in der Betriebsanleitung "MOVIMOT® MM03C–MM3XC"
Zusatzfunktion Einschränkung
1 MOVIMOT® mit verlängerten Rampenzeiten –
2 MOVIMOT® mit einstellbarer Strombegrenzung (bei überschreiten Fehler)
–
3 MOVIMOT® mit einstellbarer Strombegrenzung (umschaltbar über Klemme f1/f2)
–
4 MOVIMOT® mit Busparametrierung nur mit Feldbus-Schnittstellen MQ..
5 MOVIMOT® mit Motorschutz im Feldverteiler Z.7/Z.8 –
6 MOVIMOT® mit maximaler PWM-Frequenz 8 kHz –
7 MOVIMOT® mit Schnellstart/-stopp Die mechanische Bremse darf nur durch MOVIMOT® angesteuert werden. Eine Ansteuerung der Bremse über den Relais-ausgang ist nicht möglich.
8 MOVIMOT ®mit Minimalfrequenz 0 Hz –
10 MOVIMOT® mit Minimalfrequenz 0 Hz und reduzier-tem Drehmoment bei kleinen Frequenzen
–
11 Überwachung Netz-Phasenausfall deaktiviert –
12 MOVIMOT® mit Schnellstart/-stopp und Motorschutz im Feldverteiler Z.7 und Z.8
–
Zusatzfunktion 9 "MOVIMOT® für Hubwerksapplikationen" darf bei MOVIMOT®-Umrichter integriert im Feldverteiler Z.7/Z.8 nicht verwendet werden!
00
I
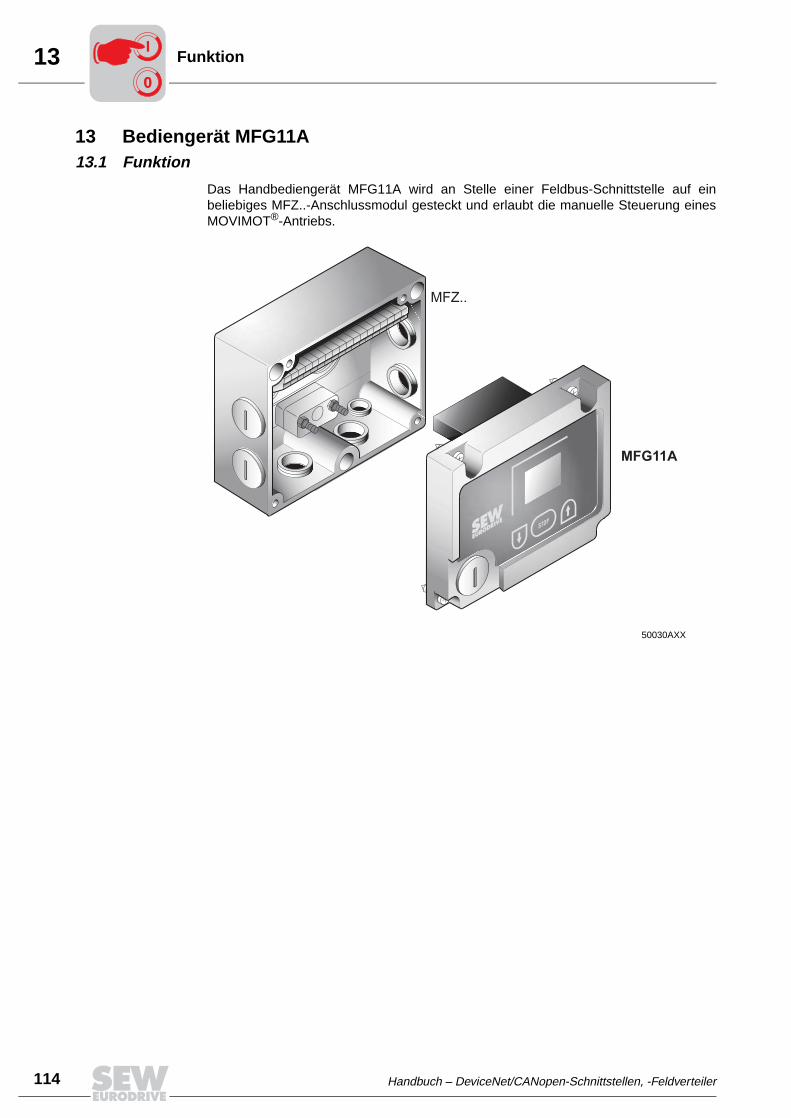
13
114 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Funktion
13 Bediengerät MFG11A13.1 Funktion
Das Handbediengerät MFG11A wird an Stelle einer Feldbus-Schnittstelle auf einbeliebiges MFZ..-Anschlussmodul gesteckt und erlaubt die manuelle Steuerung einesMOVIMOT®-Antriebs.
50030AXX
STOP
MFZ..
00
I
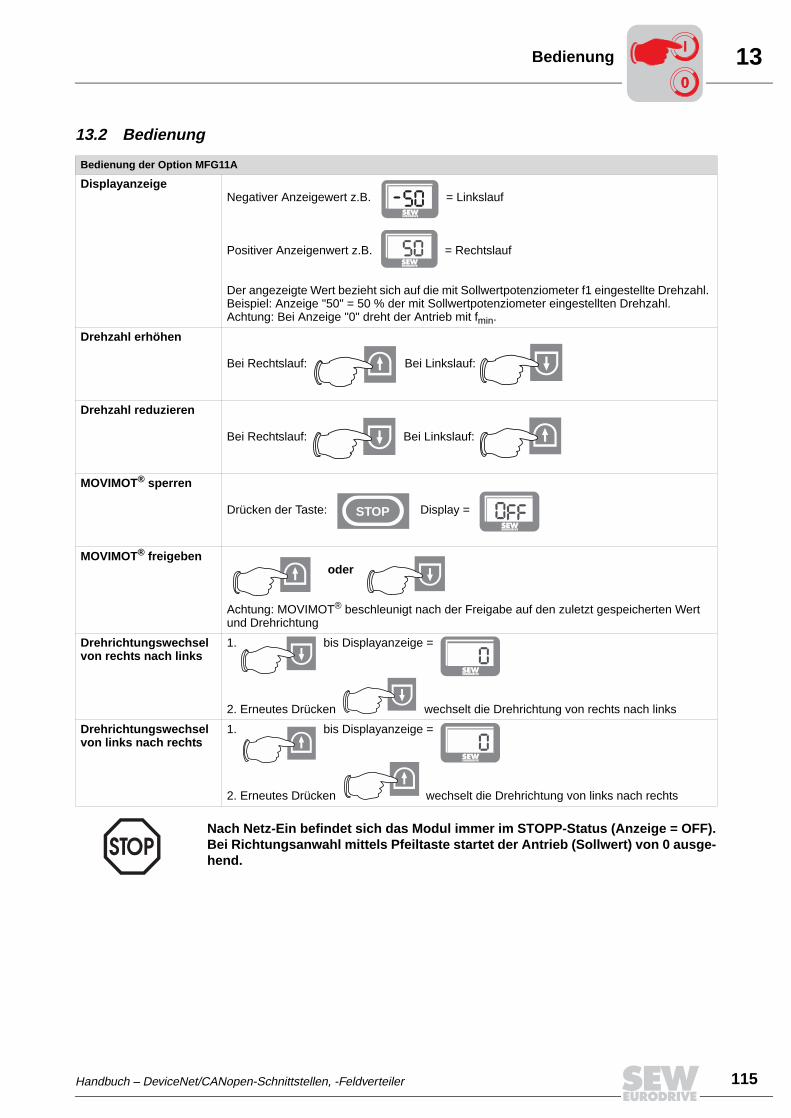
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 115
13Bedienung
13.2 Bedienung
Bedienung der Option MFG11A
DisplayanzeigeNegativer Anzeigewert z.B. = Linkslauf
Positiver Anzeigenwert z.B. = Rechtslauf
Der angezeigte Wert bezieht sich auf die mit Sollwertpotenziometer f1 eingestellte Drehzahl. Beispiel: Anzeige "50" = 50 % der mit Sollwertpotenziometer eingestellten Drehzahl.Achtung: Bei Anzeige "0" dreht der Antrieb mit fmin.
Drehzahl erhöhen
Bei Rechtslauf: Bei Linkslauf:
Drehzahl reduzieren
Bei Rechtslauf: Bei Linkslauf:
MOVIMOT® sperren
Drücken der Taste: Display =
MOVIMOT® freigeben oder
Achtung: MOVIMOT® beschleunigt nach der Freigabe auf den zuletzt gespeicherten Wert und Drehrichtung
Drehrichtungswechsel von rechts nach links
1. bis Displayanzeige =
2. Erneutes Drücken wechselt die Drehrichtung von rechts nach links
Drehrichtungswechsel von links nach rechts
1. bis Displayanzeige =
2. Erneutes Drücken wechselt die Drehrichtung von links nach rechts
Nach Netz-Ein befindet sich das Modul immer im STOPP-Status (Anzeige = OFF).Bei Richtungsanwahl mittels Pfeiltaste startet der Antrieb (Sollwert) von 0 ausge-hend.
50
50
STOP 0FF
0
0
00
I
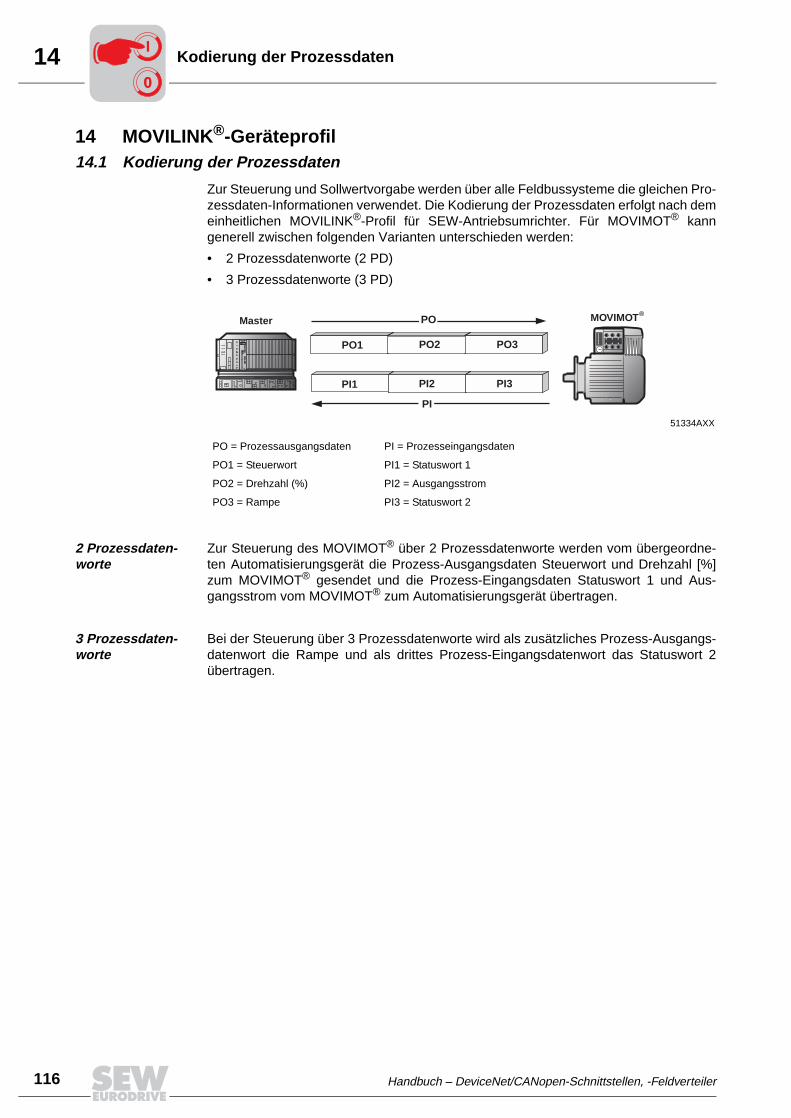
14
116 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Kodierung der Prozessdaten
14 MOVILINK®-Geräteprofil14.1 Kodierung der Prozessdaten
Zur Steuerung und Sollwertvorgabe werden über alle Feldbussysteme die gleichen Pro-zessdaten-Informationen verwendet. Die Kodierung der Prozessdaten erfolgt nach demeinheitlichen MOVILINK®-Profil für SEW-Antriebsumrichter. Für MOVIMOT® kanngenerell zwischen folgenden Varianten unterschieden werden:
• 2 Prozessdatenworte (2 PD)
• 3 Prozessdatenworte (3 PD)
2 Prozessdaten-worte
Zur Steuerung des MOVIMOT® über 2 Prozessdatenworte werden vom übergeordne-ten Automatisierungsgerät die Prozess-Ausgangsdaten Steuerwort und Drehzahl [%]zum MOVIMOT® gesendet und die Prozess-Eingangsdaten Statuswort 1 und Aus-gangsstrom vom MOVIMOT® zum Automatisierungsgerät übertragen.
3 Prozessdaten-worte
Bei der Steuerung über 3 Prozessdatenworte wird als zusätzliches Prozess-Ausgangs-datenwort die Rampe und als drittes Prozess-Eingangsdatenwort das Statuswort 2übertragen.
51334AXX
PO = Prozessausgangsdaten PI = Prozesseingangsdaten
PO1 = Steuerwort PI1 = Statuswort 1
PO2 = Drehzahl (%) PI2 = Ausgangsstrom
PO3 = Rampe PI3 = Statuswort 2
MOVIMOT®
PO1 PO2 PO3
Master
PI1 PI2 PI3
PO
PI
00
I
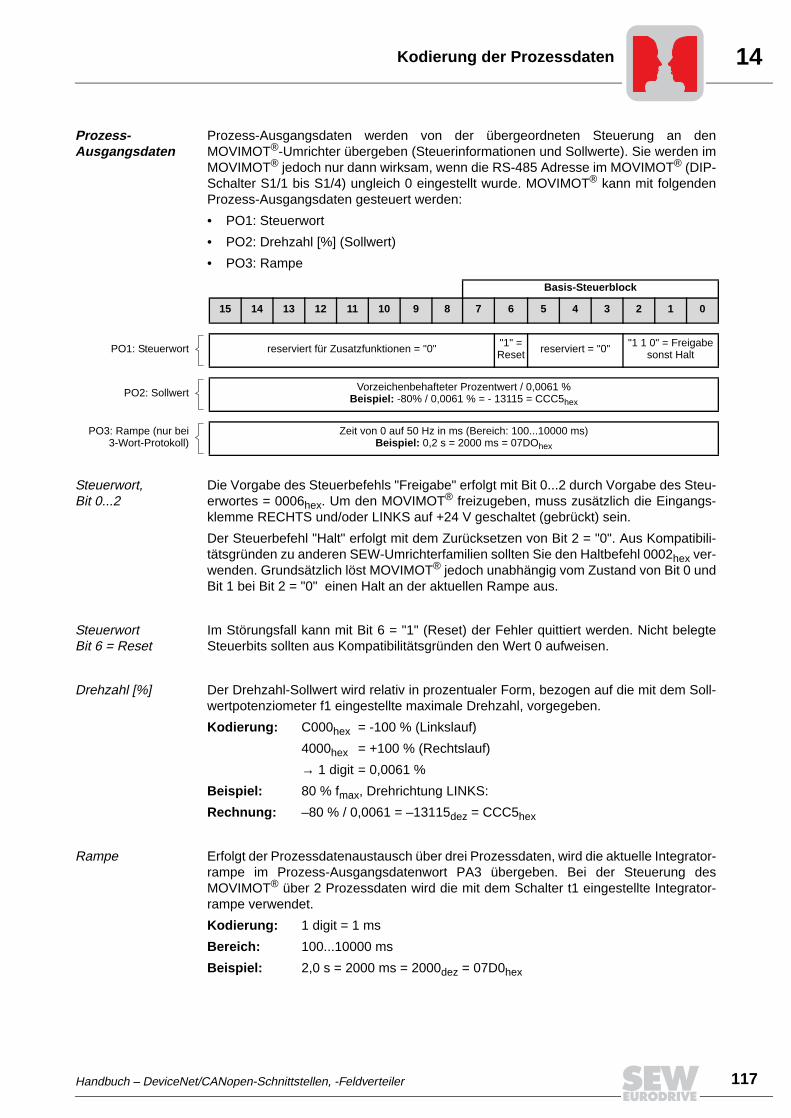
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 117
14Kodierung der Prozessdaten
Prozess-Ausgangsdaten
Prozess-Ausgangsdaten werden von der übergeordneten Steuerung an denMOVIMOT®-Umrichter übergeben (Steuerinformationen und Sollwerte). Sie werden imMOVIMOT® jedoch nur dann wirksam, wenn die RS-485 Adresse im MOVIMOT® (DIP-Schalter S1/1 bis S1/4) ungleich 0 eingestellt wurde. MOVIMOT® kann mit folgendenProzess-Ausgangsdaten gesteuert werden:
• PO1: Steuerwort
• PO2: Drehzahl [%] (Sollwert)
• PO3: Rampe
Steuerwort, Bit 0...2
Die Vorgabe des Steuerbefehls "Freigabe" erfolgt mit Bit 0...2 durch Vorgabe des Steu-erwortes = 0006hex. Um den MOVIMOT® freizugeben, muss zusätzlich die Eingangs-klemme RECHTS und/oder LINKS auf +24 V geschaltet (gebrückt) sein.
Der Steuerbefehl "Halt" erfolgt mit dem Zurücksetzen von Bit 2 = "0". Aus Kompatibili-tätsgründen zu anderen SEW-Umrichterfamilien sollten Sie den Haltbefehl 0002hex ver-wenden. Grundsätzlich löst MOVIMOT® jedoch unabhängig vom Zustand von Bit 0 undBit 1 bei Bit 2 = "0" einen Halt an der aktuellen Rampe aus.
Steuerwort Bit 6 = Reset
Im Störungsfall kann mit Bit 6 = "1" (Reset) der Fehler quittiert werden. Nicht belegteSteuerbits sollten aus Kompatibilitätsgründen den Wert 0 aufweisen.
Drehzahl [%] Der Drehzahl-Sollwert wird relativ in prozentualer Form, bezogen auf die mit dem Soll-wertpotenziometer f1 eingestellte maximale Drehzahl, vorgegeben.
Kodierung: C000hex = -100 % (Linkslauf)
4000hex = +100 % (Rechtslauf)
→ 1 digit = 0,0061 %
Beispiel: 80 % fmax, Drehrichtung LINKS:
Rechnung: –80 % / 0,0061 = –13115dez = CCC5hex
Rampe Erfolgt der Prozessdatenaustausch über drei Prozessdaten, wird die aktuelle Integrator-rampe im Prozess-Ausgangsdatenwort PA3 übergeben. Bei der Steuerung desMOVIMOT® über 2 Prozessdaten wird die mit dem Schalter t1 eingestellte Integrator-rampe verwendet.
Kodierung: 1 digit = 1 ms
Bereich: 100...10000 ms
Beispiel: 2,0 s = 2000 ms = 2000dez = 07D0hex
Basis-Steuerblock
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PO1: Steuerwort reserviert für Zusatzfunktionen = "0" "1" = Reset reserviert = "0" "1 1 0" = Freigabe
sonst Halt
PO2: Sollwert Vorzeichenbehafteter Prozentwert / 0,0061 %Beispiel: -80% / 0,0061 % = - 13115 = CCC5hex
PO3: Rampe (nur bei3-Wort-Protokoll)
Zeit von 0 auf 50 Hz in ms (Bereich: 100...10000 ms)Beispiel: 0,2 s = 2000 ms = 07DOhex
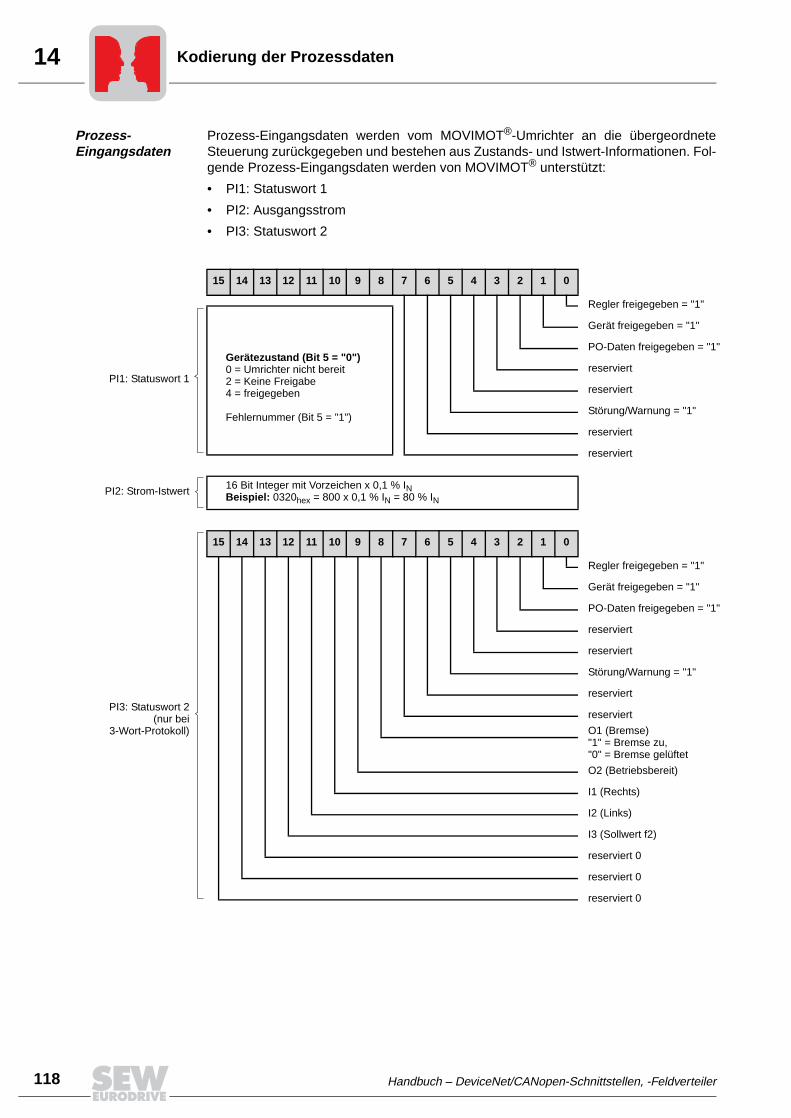
14
118 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Kodierung der Prozessdaten
Prozess-Eingangsdaten
Prozess-Eingangsdaten werden vom MOVIMOT®-Umrichter an die übergeordneteSteuerung zurückgegeben und bestehen aus Zustands- und Istwert-Informationen. Fol-gende Prozess-Eingangsdaten werden von MOVIMOT® unterstützt:
• PI1: Statuswort 1
• PI2: Ausgangsstrom
• PI3: Statuswort 2
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Regler freigegeben = "1"
PI1: Statuswort 1
Gerätezustand (Bit 5 = "0")0 = Umrichter nicht bereit2 = Keine Freigabe4 = freigegeben
Fehlernummer (Bit 5 = "1")
Gerät freigegeben = "1"
PO-Daten freigegeben = "1"
reserviert
reserviert
Störung/Warnung = "1"
reserviert
reserviert
PI2: Strom-Istwert 16 Bit Integer mit Vorzeichen x 0,1 % INBeispiel: 0320hex = 800 x 0,1 % IN = 80 % IN
PI3: Statuswort 2(nur bei
3-Wort-Protokoll)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Regler freigegeben = "1"
Gerät freigegeben = "1"
PO-Daten freigegeben = "1"
reserviert
reserviert
Störung/Warnung = "1"
reserviert
reserviert
O1 (Bremse) "1" = Bremse zu,"0" = Bremse gelüftet
O2 (Betriebsbereit)
I1 (Rechts)
I2 (Links)
I3 (Sollwert f2)
reserviert 0
reserviert 0
reserviert 0
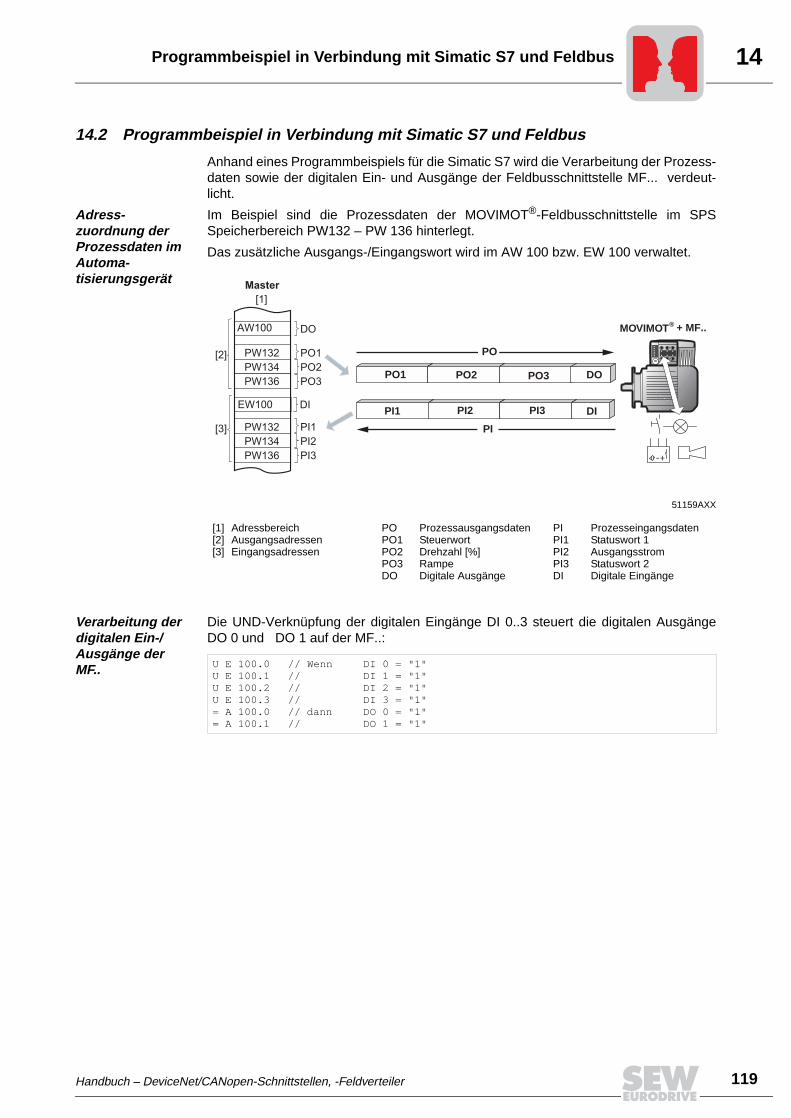
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 119
14Programmbeispiel in Verbindung mit Simatic S7 und Feldbus
14.2 Programmbeispiel in Verbindung mit Simatic S7 und Feldbus
Anhand eines Programmbeispiels für die Simatic S7 wird die Verarbeitung der Prozess-daten sowie der digitalen Ein- und Ausgänge der Feldbusschnittstelle MF... verdeut-licht.
Adress-zuordnung der Prozessdaten im Automa-tisierungsgerät
Im Beispiel sind die Prozessdaten der MOVIMOT®-Feldbusschnittstelle im SPSSpeicherbereich PW132 – PW 136 hinterlegt.
Das zusätzliche Ausgangs-/Eingangswort wird im AW 100 bzw. EW 100 verwaltet.
Verarbeitung der digitalen Ein-/Ausgänge der MF..
Die UND-Verknüpfung der digitalen Eingänge DI 0..3 steuert die digitalen AusgängeDO 0 und DO 1 auf der MF..:
51159AXX
[1] Adressbereich[2] Ausgangsadressen[3] Eingangsadressen
PO ProzessausgangsdatenPO1 SteuerwortPO2 Drehzahl [%]PO3 RampeDO Digitale Ausgänge
PI ProzesseingangsdatenPI1 Statuswort 1PI2 AusgangsstromPI3 Statuswort 2DI Digitale Eingänge
PW132PW134PW136
PW132PW134PW136
PO1PO2PO3
PI1PI2PI3
[2]
[3]
[1]
MOVIMOT®
-+
+ MF..AW100
EW100 DI
DO
PO1 PO2 PO3
PI1 PI2 PI3
PO
DO
DI
PI
Master
U E 100.0 // Wenn DI 0 = "1"U E 100.1 // DI 1 = "1"U E 100.2 // DI 2 = "1"U E 100.3 // DI 3 = "1"= A 100.0 // dann DO 0 = "1"= A 100.1 // DO 1 = "1"
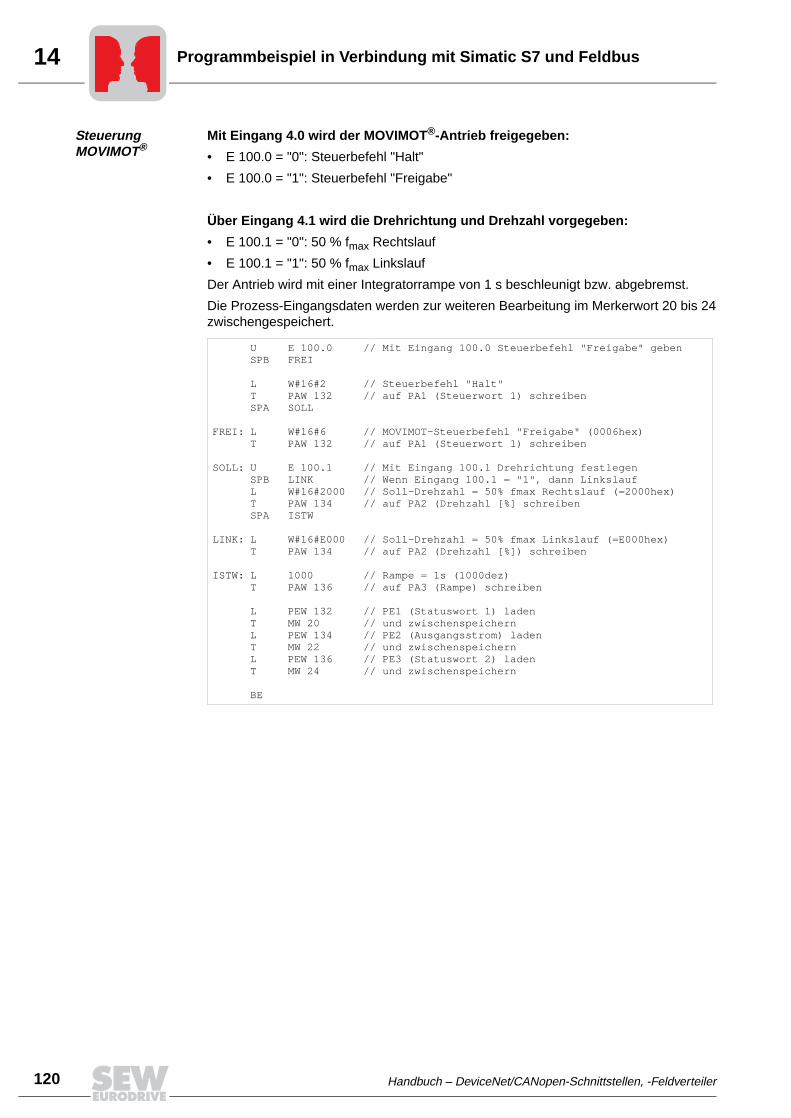
14
120 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Programmbeispiel in Verbindung mit Simatic S7 und Feldbus
Steuerung MOVIMOT®
Mit Eingang 4.0 wird der MOVIMOT®-Antrieb freigegeben:
• E 100.0 = "0": Steuerbefehl "Halt"
• E 100.0 = "1": Steuerbefehl "Freigabe"
Über Eingang 4.1 wird die Drehrichtung und Drehzahl vorgegeben:
• E 100.1 = "0": 50 % fmax Rechtslauf
• E 100.1 = "1": 50 % fmax Linkslauf
Der Antrieb wird mit einer Integratorrampe von 1 s beschleunigt bzw. abgebremst.
Die Prozess-Eingangsdaten werden zur weiteren Bearbeitung im Merkerwort 20 bis 24zwischengespeichert.
U E 100.0 // Mit Eingang 100.0 Steuerbefehl "Freigabe" gebenSPB FREI
L W#16#2 // Steuerbefehl "Halt"T PAW 132 // auf PA1 (Steuerwort 1) schreibenSPA SOLL
FREI: L W#16#6 // MOVIMOT-Steuerbefehl "Freigabe" (0006hex)T PAW 132 // auf PA1 (Steuerwort 1) schreiben
SOLL: U E 100.1 // Mit Eingang 100.1 Drehrichtung festlegenSPB LINK // Wenn Eingang 100.1 = "1", dann LinkslaufL W#16#2000 // Soll-Drehzahl = 50% fmax Rechtslauf (=2000hex)T PAW 134 // auf PA2 (Drehzahl [%] schreibenSPA ISTW
LINK: L W#16#E000 // Soll-Drehzahl = 50% fmax Linkslauf (=E000hex)T PAW 134 // auf PA2 (Drehzahl [%]) schreiben
ISTW: L 1000 // Rampe = 1s (1000dez)T PAW 136 // auf PA3 (Rampe) schreiben
L PEW 132 // PE1 (Statuswort 1) ladenT MW 20 // und zwischenspeichernL PEW 134 // PE2 (Ausgangsstrom) ladenT MW 22 // und zwischenspeichernL PEW 136 // PE3 (Statuswort 2) ladenT MW 24 // und zwischenspeichern
BE

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 121
14Programmbeispiel in Verbindung mit DeviceNet
14.3 Programmbeispiel in Verbindung mit DeviceNet
Anhand eines Programmbeispiels für die SLC500 von Allen Bradley wird die Verarbei-tung der Prozessdaten sowie der digitalen Ein- und Ausgänge der FeldbusschnittstelleMFD2. verdeutlicht.
Im Beispiel sind die Prozessausgangsdaten der MOVIMOT®-Feldbusschnittstelle imSPS Speicherbereich O:3.1 bis O:3.3, und die Prozesseingangsdaten im Speicherbe-reich I:3.1 bis I:3.3 hinterlegt. Die Ausgangsdaten werden in Rung 1 in den Speicherbe-reich N7:0 bis N7:2 und die Eingangsdaten in den Speicherbereich N7:4 bis N7:6 ge-schrieben.
06232AXX
...
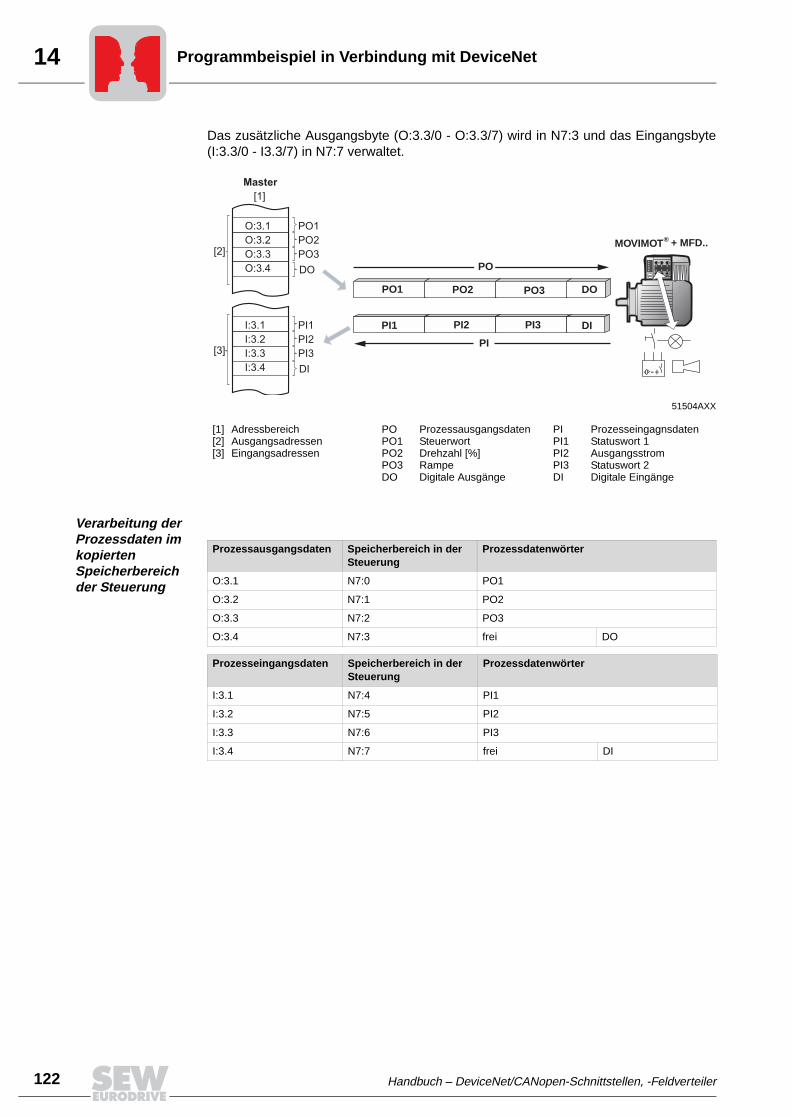
14
122 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Programmbeispiel in Verbindung mit DeviceNet
Das zusätzliche Ausgangsbyte (O:3.3/0 - O:3.3/7) wird in N7:3 und das Eingangsbyte(I:3.3/0 - I3.3/7) in N7:7 verwaltet.
Verarbeitung der Prozessdaten im kopierten Speicherbereich der Steuerung
51504AXX
[1] Adressbereich[2] Ausgangsadressen[3] Eingangsadressen
PO ProzessausgangsdatenPO1 SteuerwortPO2 Drehzahl [%]PO3 RampeDO Digitale Ausgänge
PI ProzesseingagnsdatenPI1 Statuswort 1PI2 AusgangsstromPI3 Statuswort 2DI Digitale Eingänge
O:3.1O:3.2O:3.3O:3.4
PO1PO2PO3[2]
[1]
MOVIMOT®
-+
+ MFD..
DO
PO1 PO2 PO3
PI1 PI2 PI3
PO
DO
DI
PI
Master
I:3.1I:3.2I:3.3I:3.4
PI1PI2PI3[3]
DI
Prozessausgangsdaten Speicherbereich in der Steuerung
Prozessdatenwörter
O:3.1 N7:0 PO1
O:3.2 N7:1 PO2
O:3.3 N7:2 PO3
O:3.4 N7:3 frei DO
Prozesseingangsdaten Speicherbereich in der Steuerung
Prozessdatenwörter
I:3.1 N7:4 PI1
I:3.2 N7:5 PI2
I:3.3 N7:6 PI3
I:3.4 N7:7 frei DI
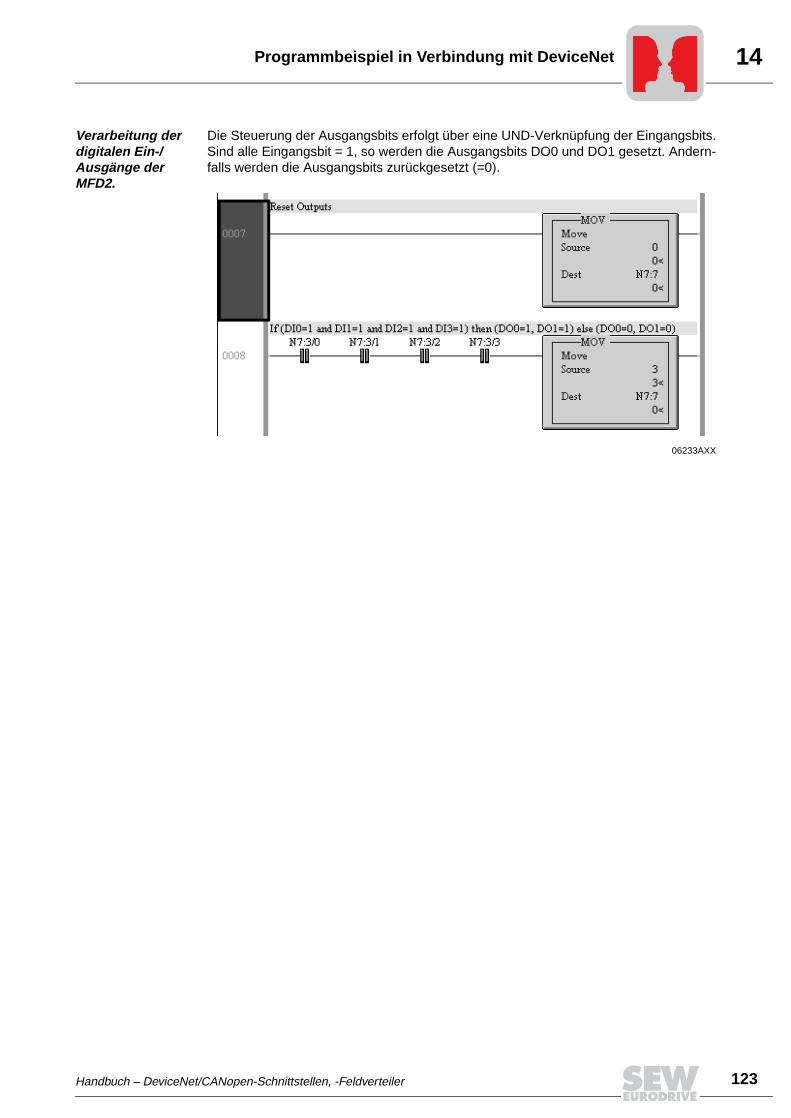
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 123
14Programmbeispiel in Verbindung mit DeviceNet
Verarbeitung der digitalen Ein-/Ausgänge der MFD2.
Die Steuerung der Ausgangsbits erfolgt über eine UND-Verknüpfung der Eingangsbits.Sind alle Eingangsbit = 1, so werden die Ausgangsbits DO0 und DO1 gesetzt. Andern-falls werden die Ausgangsbits zurückgesetzt (=0).
06233AXX
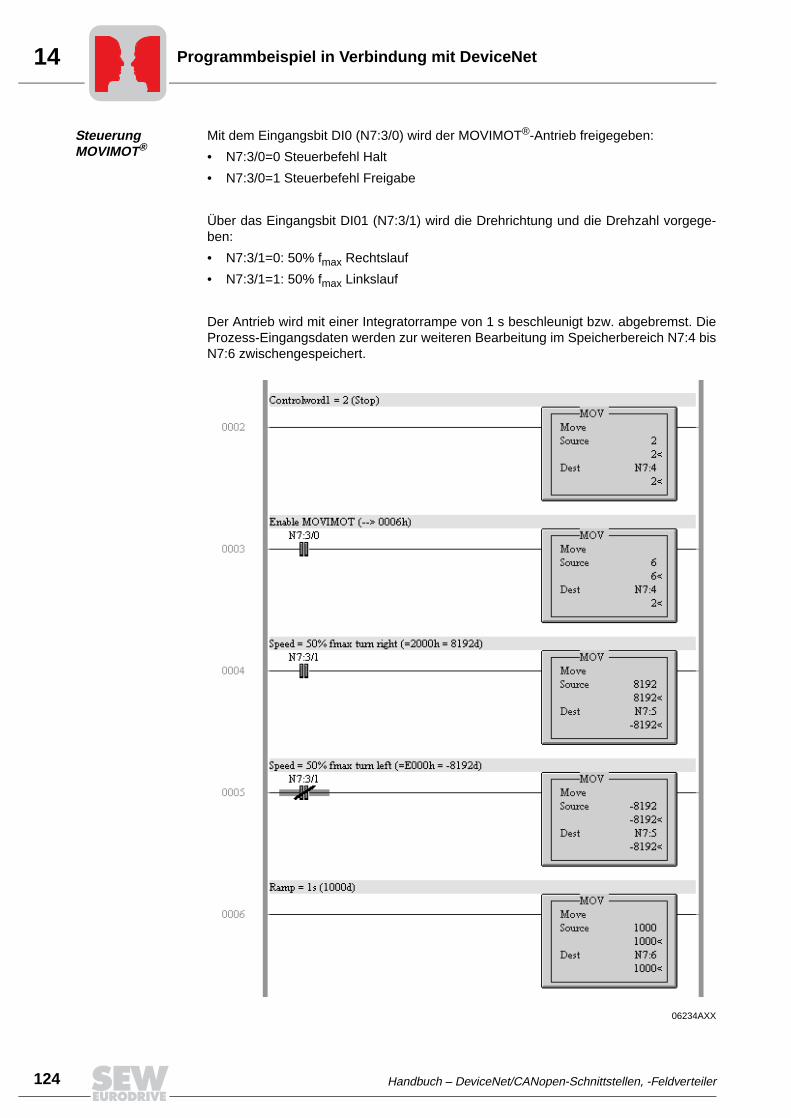
14
124 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Programmbeispiel in Verbindung mit DeviceNet
Steuerung MOVIMOT®
Mit dem Eingangsbit DI0 (N7:3/0) wird der MOVIMOT®-Antrieb freigegeben:
• N7:3/0=0 Steuerbefehl Halt
• N7:3/0=1 Steuerbefehl Freigabe
Über das Eingangsbit DI01 (N7:3/1) wird die Drehrichtung und die Drehzahl vorgege-ben:
• N7:3/1=0: 50% fmax Rechtslauf
• N7:3/1=1: 50% fmax Linkslauf
Der Antrieb wird mit einer Integratorrampe von 1 s beschleunigt bzw. abgebremst. DieProzess-Eingangsdaten werden zur weiteren Bearbeitung im Speicherbereich N7:4 bisN7:6 zwischengespeichert.
06234AXX
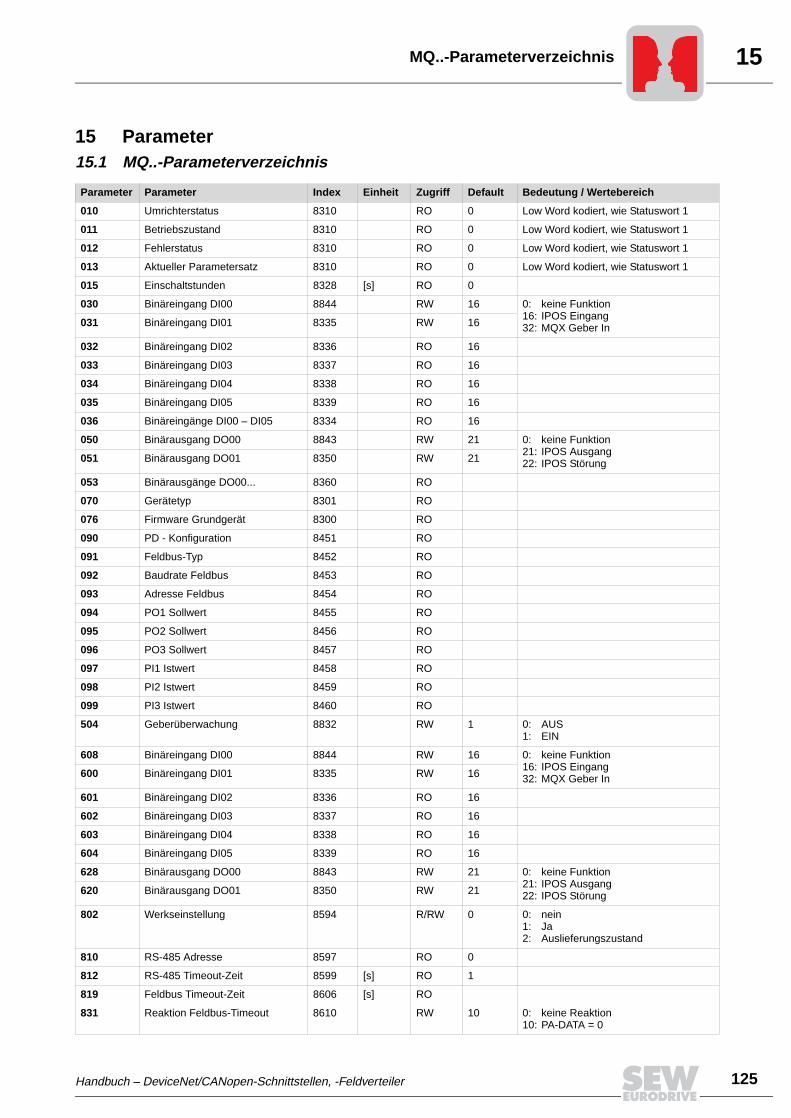
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 125
15MQ..-Parameterverzeichnis
15 Parameter15.1 MQ..-Parameterverzeichnis
Parameter Parameter Index Einheit Zugriff Default Bedeutung / Wertebereich
010 Umrichterstatus 8310 RO 0 Low Word kodiert, wie Statuswort 1
011 Betriebszustand 8310 RO 0 Low Word kodiert, wie Statuswort 1
012 Fehlerstatus 8310 RO 0 Low Word kodiert, wie Statuswort 1
013 Aktueller Parametersatz 8310 RO 0 Low Word kodiert, wie Statuswort 1
015 Einschaltstunden 8328 [s] RO 0
030 Binäreingang DI00 8844 RW 16 0: keine Funktion16: IPOS Eingang32: MQX Geber In031 Binäreingang DI01 8335 RW 16
032 Binäreingang DI02 8336 RO 16
033 Binäreingang DI03 8337 RO 16
034 Binäreingang DI04 8338 RO 16
035 Binäreingang DI05 8339 RO 16
036 Binäreingänge DI00 – DI05 8334 RO 16
050 Binärausgang DO00 8843 RW 21 0: keine Funktion21: IPOS Ausgang22: IPOS Störung051 Binärausgang DO01 8350 RW 21
053 Binärausgänge DO00... 8360 RO
070 Gerätetyp 8301 RO
076 Firmware Grundgerät 8300 RO
090 PD - Konfiguration 8451 RO
091 Feldbus-Typ 8452 RO
092 Baudrate Feldbus 8453 RO
093 Adresse Feldbus 8454 RO
094 PO1 Sollwert 8455 RO
095 PO2 Sollwert 8456 RO
096 PO3 Sollwert 8457 RO
097 PI1 Istwert 8458 RO
098 PI2 Istwert 8459 RO
099 PI3 Istwert 8460 RO
504 Geberüberwachung 8832 RW 1 0: AUS 1: EIN
608 Binäreingang DI00 8844 RW 16 0: keine Funktion16: IPOS Eingang32: MQX Geber In600 Binäreingang DI01 8335 RW 16
601 Binäreingang DI02 8336 RO 16
602 Binäreingang DI03 8337 RO 16
603 Binäreingang DI04 8338 RO 16
604 Binäreingang DI05 8339 RO 16
628 Binärausgang DO00 8843 RW 21 0: keine Funktion21: IPOS Ausgang22: IPOS Störung620 Binärausgang DO01 8350 RW 21
802 Werkseinstellung 8594 R/RW 0 0: nein1: Ja2: Auslieferungszustand
810 RS-485 Adresse 8597 RO 0
812 RS-485 Timeout-Zeit 8599 [s] RO 1
819 Feldbus Timeout-Zeit 8606 [s] RO
831 Reaktion Feldbus-Timeout 8610 RW 10 0: keine Reaktion10: PA-DATA = 0
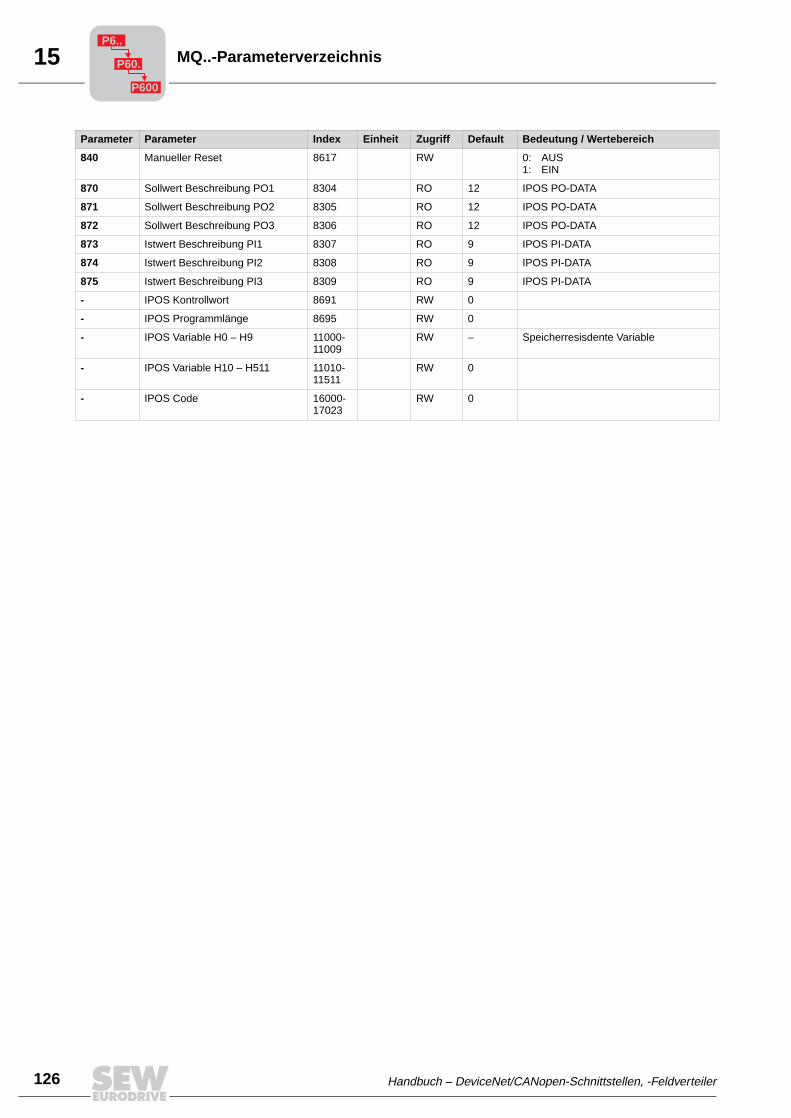
15
126 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
MQ..-Parameterverzeichnis
840 Manueller Reset 8617 RW 0: AUS 1: EIN
870 Sollwert Beschreibung PO1 8304 RO 12 IPOS PO-DATA
871 Sollwert Beschreibung PO2 8305 RO 12 IPOS PO-DATA
872 Sollwert Beschreibung PO3 8306 RO 12 IPOS PO-DATA
873 Istwert Beschreibung PI1 8307 RO 9 IPOS PI-DATA
874 Istwert Beschreibung PI2 8308 RO 9 IPOS PI-DATA
875 Istwert Beschreibung PI3 8309 RO 9 IPOS PI-DATA
- IPOS Kontrollwort 8691 RW 0
- IPOS Programmlänge 8695 RW 0
- IPOS Variable H0 – H9 11000-11009
RW – Speicherresisdente Variable
- IPOS Variable H10 – H511 11010-11511
RW 0
- IPOS Code 16000-17023
RW 0
Parameter Parameter Index Einheit Zugriff Default Bedeutung / Wertebereich
P6..
P60.
P600
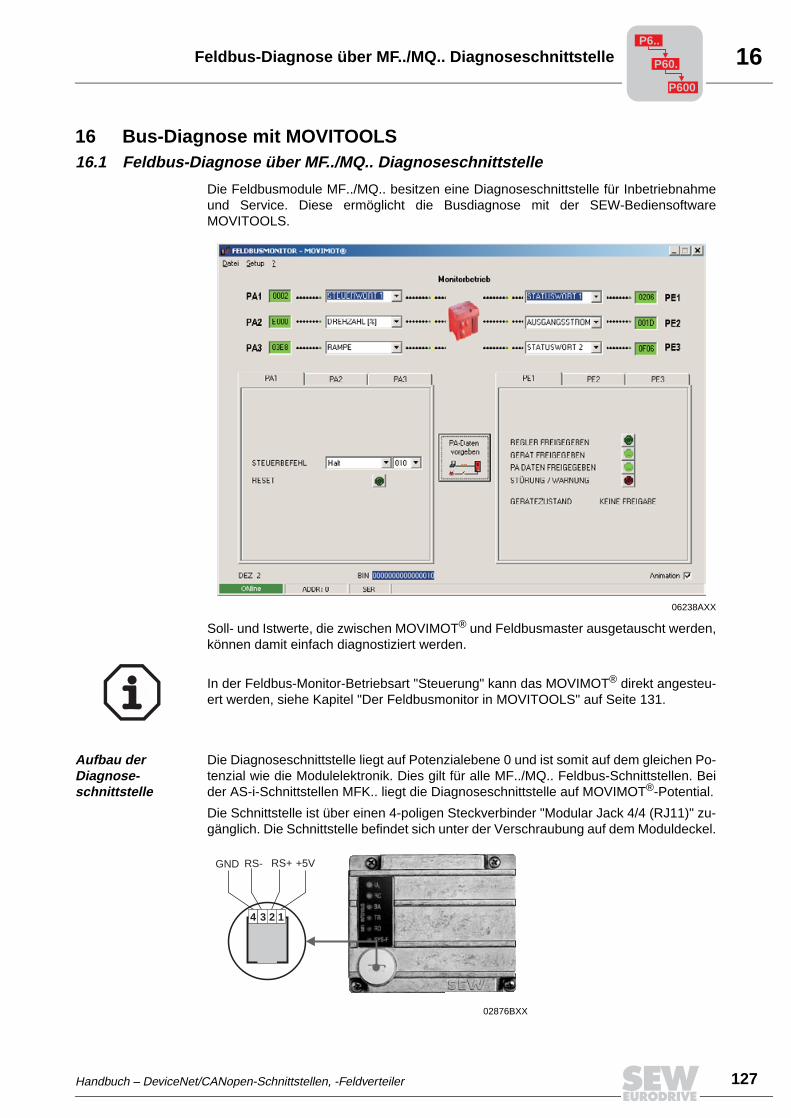
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 127
16Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
16 Bus-Diagnose mit MOVITOOLS16.1 Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Die Feldbusmodule MF../MQ.. besitzen eine Diagnoseschnittstelle für Inbetriebnahmeund Service. Diese ermöglicht die Busdiagnose mit der SEW-BediensoftwareMOVITOOLS.
Soll- und Istwerte, die zwischen MOVIMOT® und Feldbusmaster ausgetauscht werden,können damit einfach diagnostiziert werden.
Aufbau der Diagnose-schnittstelle
Die Diagnoseschnittstelle liegt auf Potenzialebene 0 und ist somit auf dem gleichen Po-tenzial wie die Modulelektronik. Dies gilt für alle MF../MQ.. Feldbus-Schnittstellen. Beider AS-i-Schnittstellen MFK.. liegt die Diagnoseschnittstelle auf MOVIMOT®-Potential.
Die Schnittstelle ist über einen 4-poligen Steckverbinder "Modular Jack 4/4 (RJ11)" zu-gänglich. Die Schnittstelle befindet sich unter der Verschraubung auf dem Moduldeckel.
06238AXX
In der Feldbus-Monitor-Betriebsart "Steuerung" kann das MOVIMOT® direkt angesteu-ert werden, siehe Kapitel "Der Feldbusmonitor in MOVITOOLS" auf Seite 131.
02876BXX
GND RS- RS+ +5V
4 3 2 1
P6..
P60.
P600
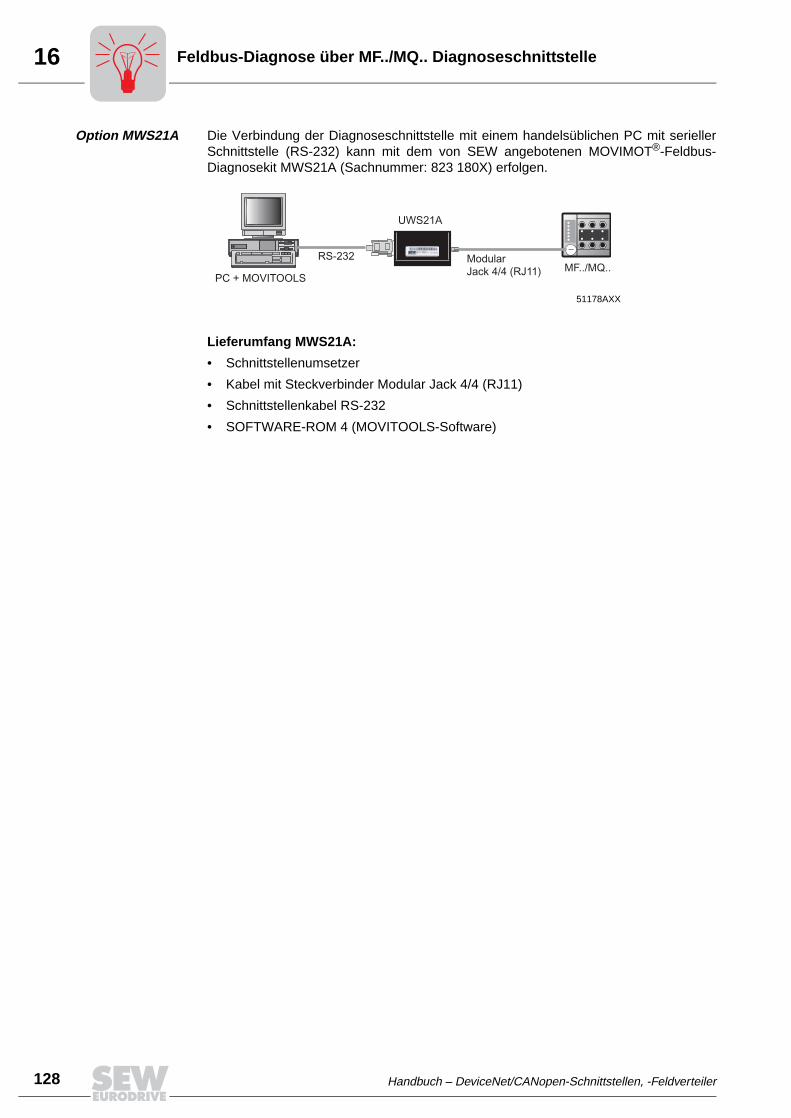
16
128 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Option MWS21A Die Verbindung der Diagnoseschnittstelle mit einem handelsüblichen PC mit seriellerSchnittstelle (RS-232) kann mit dem von SEW angebotenen MOVIMOT®-Feldbus-Diagnosekit MWS21A (Sachnummer: 823 180X) erfolgen.
Lieferumfang MWS21A:
• Schnittstellenumsetzer
• Kabel mit Steckverbinder Modular Jack 4/4 (RJ11)
• Schnittstellenkabel RS-232
• SOFTWARE-ROM 4 (MOVITOOLS-Software)
51178AXX
UWS21A
PC + MOVITOOLS
RS-232 Modular Jack 4/4 (RJ11) MF../MQ..
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 129
16Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Relevante Diagnose-parameter
Die Software MOVITOOLS-Shell ermöglicht die Diagnose des MOVIMOT® über dieDiagnoseschnittstelle der Feldbusschnittstellen MF..
Anzeigewerte - 00. Prozesswerte
MOVIMOT® liefert als Prozesswert den Ausgangsstrom zurück.
Anzeigewerte - 01. Statusanzeigen
Der MOVIMOT®-Status wird vollständig interpretiert und in der Statusanzeige darge-stellt.
Anzeigewerte - 04. Binäreingänge Option
Die digitalen Eingänge der Feldbus-Schnittstellen MF.. werden als optionale Eingängedes MOVIMOT® angezeigt. Da diese Eingänge keinen direkten Einfluss auf dasMOVIMOT® haben, ist die Klemmenbelegung auf "keine Funktion" gesetzt.
Anzeigewerte - 06. Binärausgänge Option
Die digitalen Ausgänge der Feldbus-Schnittstellen MF.. werden als optionale Ausgängedes MOVIMOT® angezeigt. Da diese Ausgänge keinen direkten Einfluss auf dasMOVIMOT® haben ist die Klemmenbelegung auf "keine Funktion" gesetzt.
Menü Nummer Parametername Index Bedeutung / Implementierung
004 Ausgangsstrom [% In] 8321 Ausgangsstrom MOVIMOT®
Menü Nummer Parametername Index Bedeutung / Implementierung
010 Umrichterstatus 8310 Umrichterstatus MOVIMOT®
011 Betriebszustand 8310 Betriebszustand MOVIMOT®
012 Fehlerstatus 8310 Fehlerstatus MOVIMOT®
Menü Nummer Parametername Index Bedeutung / Implementierung
040 Binäreingänge DI10 8340 Status von MF..-Binäreingänge DI0
041 Binäreingänge DI11 8341 Status von MF..-Binäreingänge DI1
042 Binäreingänge DI12 8342 Status von MF..-Binäreingänge DI2
043 Binäreingänge DI13 8343 Status von MF..-Binäreingänge DI3
044 Binäreingänge DI14 8344 Status von MF..-Binäreingänge DI4
045 Binäreingänge DI15 8345 Status von MF..-Binäreingänge DI5
048 Binäreingänge DI10 ..DI17 8348 Zustand aller Binäreingänge
Menü Nummer Parametername Index Bedeutung / Implementierung
060 Binärausgänge DO10 8352 Status von MF..-Binärausgänge DO0
061 Binärausgänge DO11 8353 Status von MF..-Binärausgänge DO
068 Binärausgänge DO10 bis DO17
8360 Status der MF..-Binärausgänge DO0 und DO1
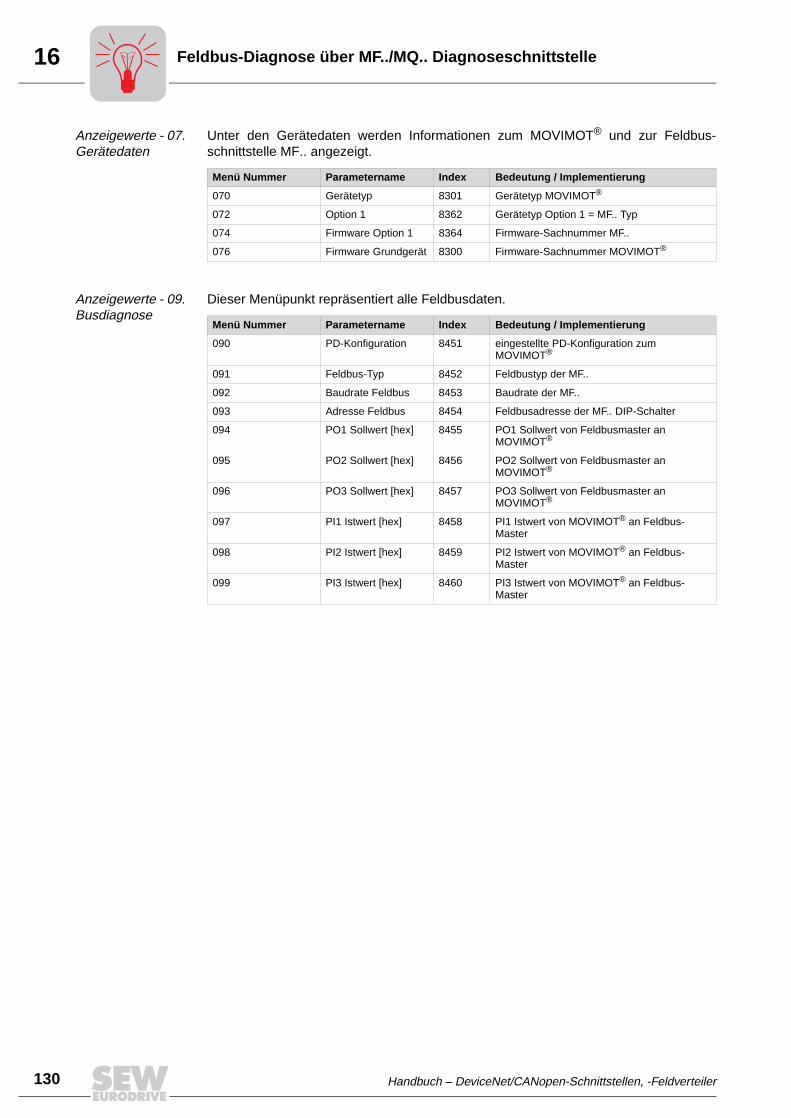
16
130 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Anzeigewerte - 07. Gerätedaten
Unter den Gerätedaten werden Informationen zum MOVIMOT® und zur Feldbus-schnittstelle MF.. angezeigt.
Anzeigewerte - 09. Busdiagnose
Dieser Menüpunkt repräsentiert alle Feldbusdaten.
Menü Nummer Parametername Index Bedeutung / Implementierung
070 Gerätetyp 8301 Gerätetyp MOVIMOT®
072 Option 1 8362 Gerätetyp Option 1 = MF.. Typ
074 Firmware Option 1 8364 Firmware-Sachnummer MF..
076 Firmware Grundgerät 8300 Firmware-Sachnummer MOVIMOT®
Menü Nummer Parametername Index Bedeutung / Implementierung
090 PD-Konfiguration 8451 eingestellte PD-Konfiguration zum MOVIMOT®
091 Feldbus-Typ 8452 Feldbustyp der MF..
092 Baudrate Feldbus 8453 Baudrate der MF..
093 Adresse Feldbus 8454 Feldbusadresse der MF.. DIP-Schalter
094 PO1 Sollwert [hex] 8455 PO1 Sollwert von Feldbusmaster an MOVIMOT®
095 PO2 Sollwert [hex] 8456 PO2 Sollwert von Feldbusmaster an MOVIMOT®
096 PO3 Sollwert [hex] 8457 PO3 Sollwert von Feldbusmaster an MOVIMOT®
097 PI1 Istwert [hex] 8458 PI1 Istwert von MOVIMOT® an Feldbus- Master
098 PI2 Istwert [hex] 8459 PI2 Istwert von MOVIMOT® an Feldbus-Master
099 PI3 Istwert [hex] 8460 PI3 Istwert von MOVIMOT® an Feldbus-Master
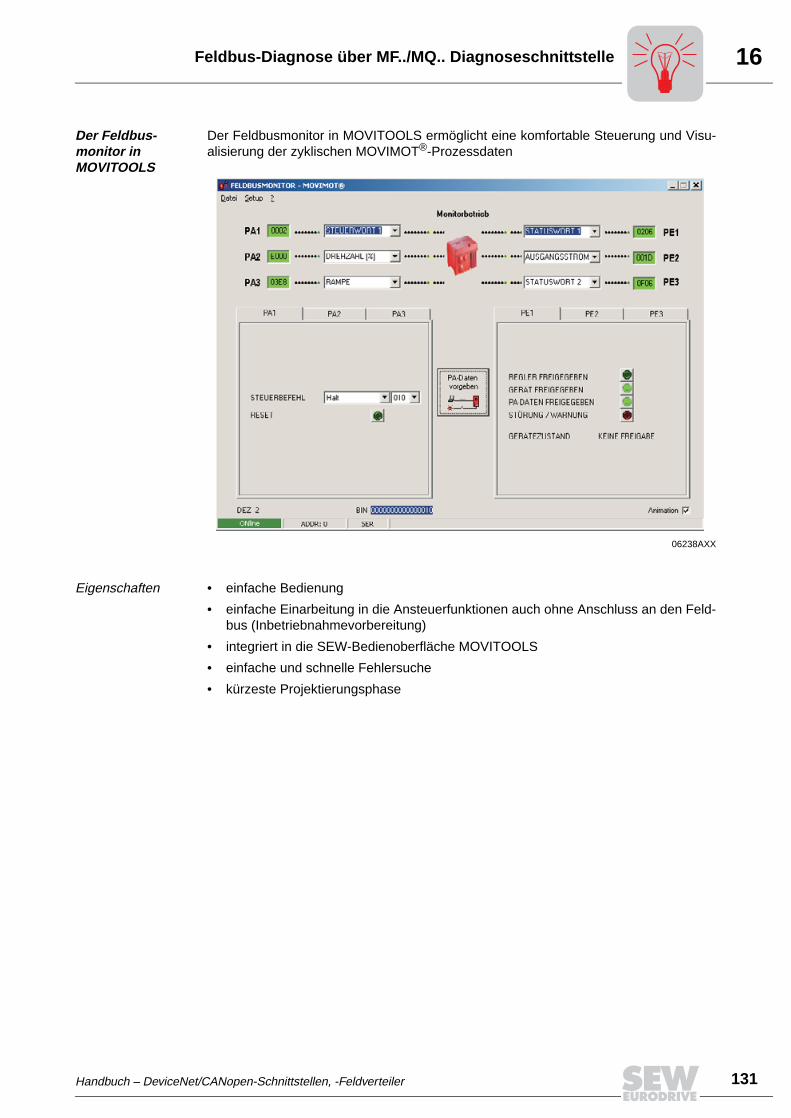
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 131
16Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Der Feldbus-monitor in MOVITOOLS
Der Feldbusmonitor in MOVITOOLS ermöglicht eine komfortable Steuerung und Visu-alisierung der zyklischen MOVIMOT®-Prozessdaten
Eigenschaften • einfache Bedienung
• einfache Einarbeitung in die Ansteuerfunktionen auch ohne Anschluss an den Feld-bus (Inbetriebnahmevorbereitung)
• integriert in die SEW-Bedienoberfläche MOVITOOLS
• einfache und schnelle Fehlersuche
• kürzeste Projektierungsphase
06238AXX
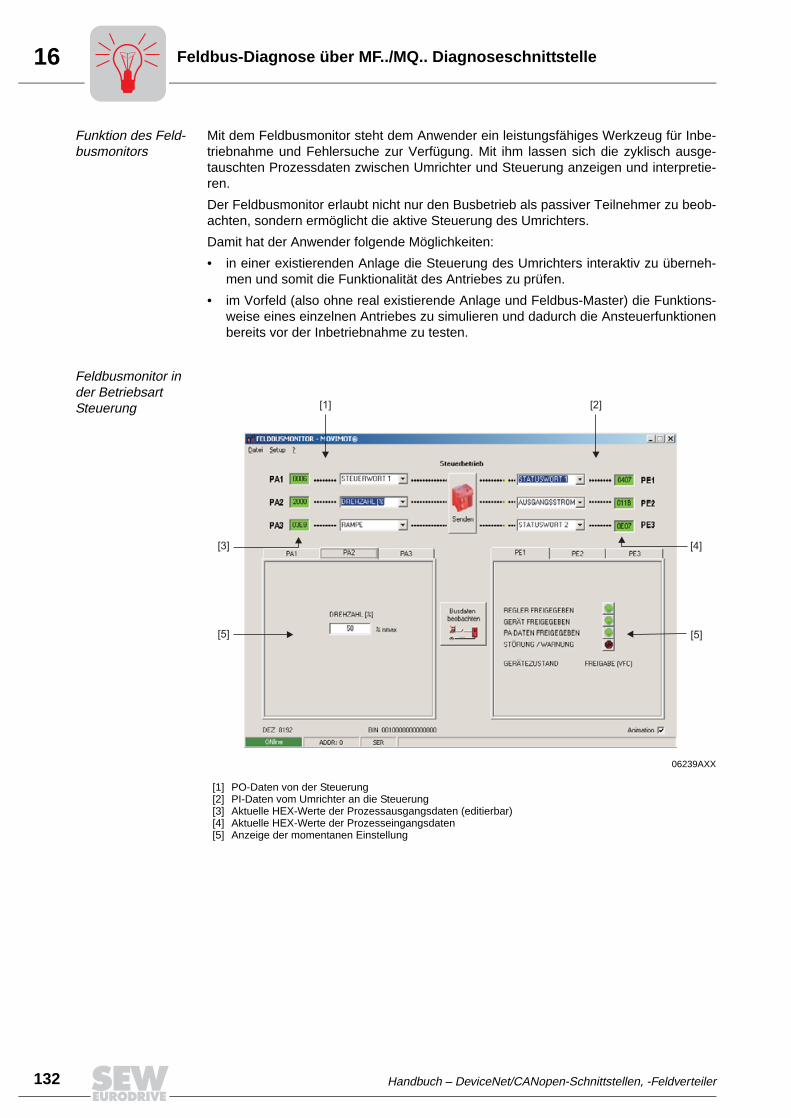
16
132 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Feldbus-Diagnose über MF../MQ.. Diagnoseschnittstelle
Funktion des Feld-busmonitors
Mit dem Feldbusmonitor steht dem Anwender ein leistungsfähiges Werkzeug für Inbe-triebnahme und Fehlersuche zur Verfügung. Mit ihm lassen sich die zyklisch ausge-tauschten Prozessdaten zwischen Umrichter und Steuerung anzeigen und interpretie-ren.
Der Feldbusmonitor erlaubt nicht nur den Busbetrieb als passiver Teilnehmer zu beob-achten, sondern ermöglicht die aktive Steuerung des Umrichters.
Damit hat der Anwender folgende Möglichkeiten:
• in einer existierenden Anlage die Steuerung des Umrichters interaktiv zu überneh-men und somit die Funktionalität des Antriebes zu prüfen.
• im Vorfeld (also ohne real existierende Anlage und Feldbus-Master) die Funktions-weise eines einzelnen Antriebes zu simulieren und dadurch die Ansteuerfunktionenbereits vor der Inbetriebnahme zu testen.
Feldbusmonitor in der Betriebsart Steuerung
06239AXX
[1] PO-Daten von der Steuerung[2] PI-Daten vom Umrichter an die Steuerung[3] Aktuelle HEX-Werte der Prozessausgangsdaten (editierbar)[4] Aktuelle HEX-Werte der Prozesseingangsdaten [5] Anzeige der momentanen Einstellung
[3] [4]
[1] [2]
[5] [5]
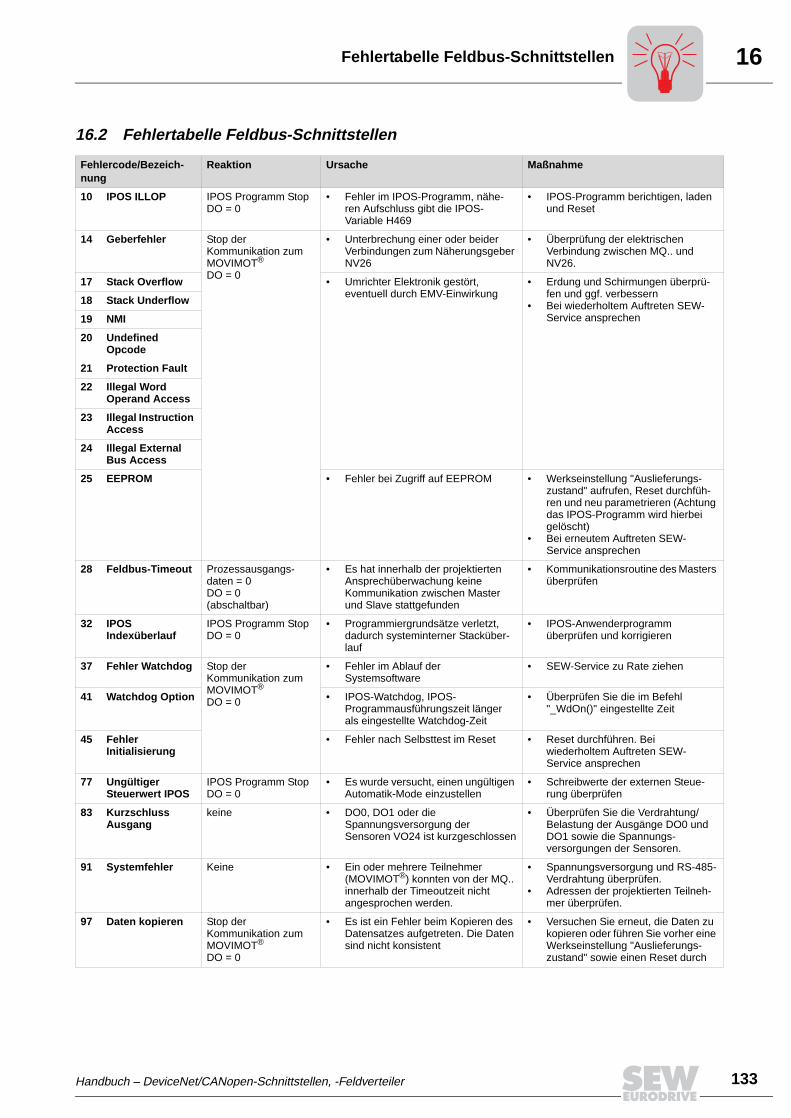
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 133
16Fehlertabelle Feldbus-Schnittstellen
16.2 Fehlertabelle Feldbus-Schnittstellen
Fehlercode/Bezeich-nung
Reaktion Ursache Maßnahme
10 IPOS ILLOP IPOS Programm StopDO = 0
• Fehler im IPOS-Programm, nähe-ren Aufschluss gibt die IPOS-Variable H469
• IPOS-Programm berichtigen, laden und Reset
14 Geberfehler Stop der Kommunikation zum MOVIMOT®
DO = 0
• Unterbrechung einer oder beider Verbindungen zum Näherungsgeber NV26
• Überprüfung der elektrischen Verbindung zwischen MQ.. und NV26.
17 Stack Overflow • Umrichter Elektronik gestört, eventuell durch EMV-Einwirkung
• Erdung und Schirmungen überprü-fen und ggf. verbessern
• Bei wiederholtem Auftreten SEW-Service ansprechen
18 Stack Underflow
19 NMI
20 Undefined Opcode
21 Protection Fault
22 Illegal Word Operand Access
23 Illegal Instruction Access
24 Illegal External Bus Access
25 EEPROM • Fehler bei Zugriff auf EEPROM • Werkseinstellung "Auslieferungs-zustand" aufrufen, Reset durchfüh-ren und neu parametrieren (Achtung das IPOS-Programm wird hierbei gelöscht)
• Bei erneutem Auftreten SEW-Service ansprechen
28 Feldbus-Timeout Prozessausgangs-daten = 0DO = 0(abschaltbar)
• Es hat innerhalb der projektierten Ansprechüberwachung keine Kommunikation zwischen Master und Slave stattgefunden
• Kommunikationsroutine des Masters überprüfen
32 IPOS Indexüberlauf
IPOS Programm StopDO = 0
• Programmiergrundsätze verletzt, dadurch systeminterner Stacküber-lauf
• IPOS-Anwenderprogramm überprüfen und korrigieren
37 Fehler Watchdog Stop der Kommunikation zum MOVIMOT®
DO = 0
• Fehler im Ablauf der Systemsoftware
• SEW-Service zu Rate ziehen
41 Watchdog Option • IPOS-Watchdog, IPOS-Programmausführungszeit länger als eingestellte Watchdog-Zeit
• Überprüfen Sie die im Befehl "_WdOn()" eingestellte Zeit
45 Fehler Initialisierung
• Fehler nach Selbsttest im Reset • Reset durchführen. Bei wiederholtem Auftreten SEW-Service ansprechen
77 Ungültiger Steuerwert IPOS
IPOS Programm StopDO = 0
• Es wurde versucht, einen ungültigen Automatik-Mode einzustellen
• Schreibwerte der externen Steue-rung überprüfen
83 Kurzschluss Ausgang
keine • DO0, DO1 oder die Spannungsversorgung der Sensoren VO24 ist kurzgeschlossen
• Überprüfen Sie die Verdrahtung/ Belastung der Ausgänge DO0 und DO1 sowie die Spannungs-versorgungen der Sensoren.
91 Systemfehler Keine • Ein oder mehrere Teilnehmer (MOVIMOT®) konnten von der MQ.. innerhalb der Timeoutzeit nicht angesprochen werden.
• Spannungsversorgung und RS-485-Verdrahtung überprüfen.
• Adressen der projektierten Teilneh-mer überprüfen.
97 Daten kopieren Stop der Kommunikation zum MOVIMOT®
DO = 0
• Es ist ein Fehler beim Kopieren des Datensatzes aufgetreten. Die Daten sind nicht konsistent
• Versuchen Sie erneut, die Daten zu kopieren oder führen Sie vorher eine Werkseinstellung "Auslieferungs-zustand" sowie einen Reset durch
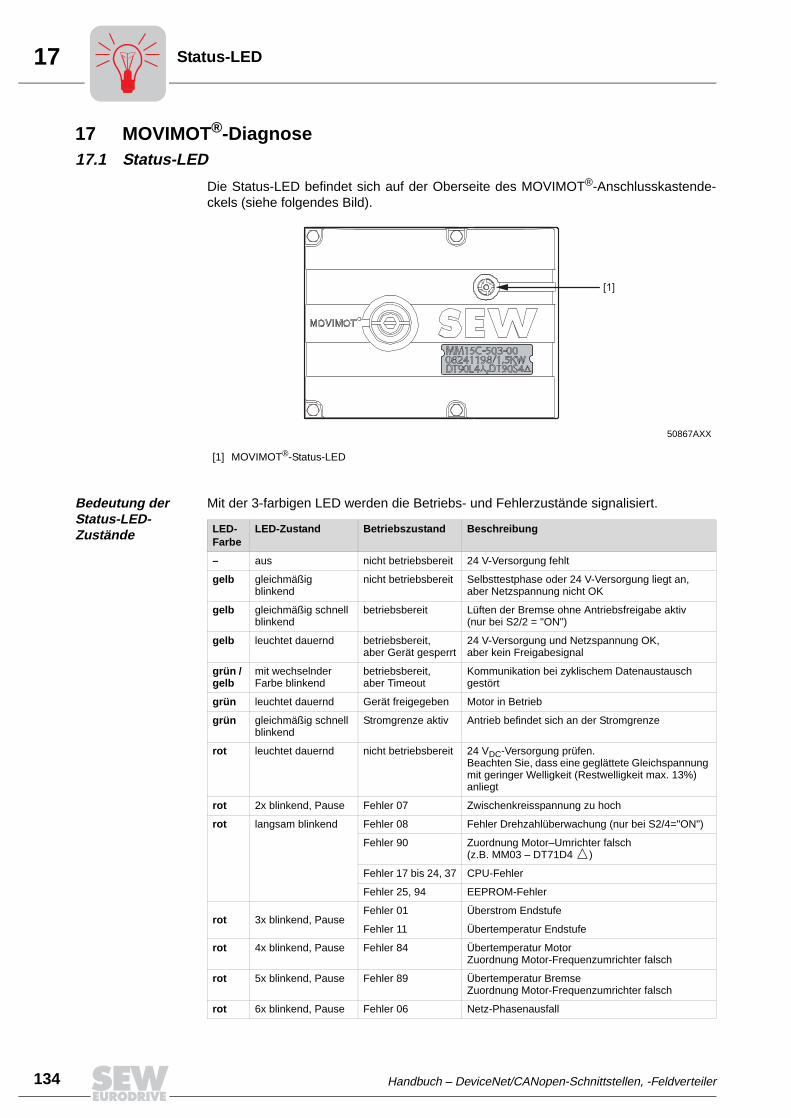
17
134 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Status-LED
17 MOVIMOT®-Diagnose17.1 Status-LED
Die Status-LED befindet sich auf der Oberseite des MOVIMOT®-Anschlusskastende-ckels (siehe folgendes Bild).
Bedeutung der Status-LED- Zustände
Mit der 3-farbigen LED werden die Betriebs- und Fehlerzustände signalisiert.
50867AXX
[1] MOVIMOT®-Status-LED
[1]
LED-Farbe
LED-Zustand Betriebszustand Beschreibung
– aus nicht betriebsbereit 24 V-Versorgung fehlt
gelb gleichmäßig blinkend
nicht betriebsbereit Selbsttestphase oder 24 V-Versorgung liegt an, aber Netzspannung nicht OK
gelb gleichmäßig schnell blinkend
betriebsbereit Lüften der Bremse ohne Antriebsfreigabe aktiv(nur bei S2/2 = "ON")
gelb leuchtet dauernd betriebsbereit, aber Gerät gesperrt
24 V-Versorgung und Netzspannung OK, aber kein Freigabesignal
grün / gelb
mit wechselnder Farbe blinkend
betriebsbereit, aber Timeout
Kommunikation bei zyklischem Datenaustausch gestört
grün leuchtet dauernd Gerät freigegeben Motor in Betrieb
grün gleichmäßig schnell blinkend
Stromgrenze aktiv Antrieb befindet sich an der Stromgrenze
rot leuchtet dauernd nicht betriebsbereit 24 VDC-Versorgung prüfen.Beachten Sie, dass eine geglättete Gleichspannung mit geringer Welligkeit (Restwelligkeit max. 13%) anliegt
rot 2x blinkend, Pause Fehler 07 Zwischenkreisspannung zu hoch
rot langsam blinkend Fehler 08 Fehler Drehzahlüberwachung (nur bei S2/4="ON")
Fehler 90 Zuordnung Motor–Umrichter falsch (z.B. MM03 – DT71D4 )
Fehler 17 bis 24, 37 CPU-Fehler
Fehler 25, 94 EEPROM-Fehler
rot 3x blinkend, PauseFehler 01 Überstrom Endstufe
Fehler 11 Übertemperatur Endstufe
rot 4x blinkend, Pause Fehler 84 Übertemperatur Motor Zuordnung Motor-Frequenzumrichter falsch
rot 5x blinkend, Pause Fehler 89 Übertemperatur BremseZuordnung Motor-Frequenzumrichter falsch
rot 6x blinkend, Pause Fehler 06 Netz-Phasenausfall
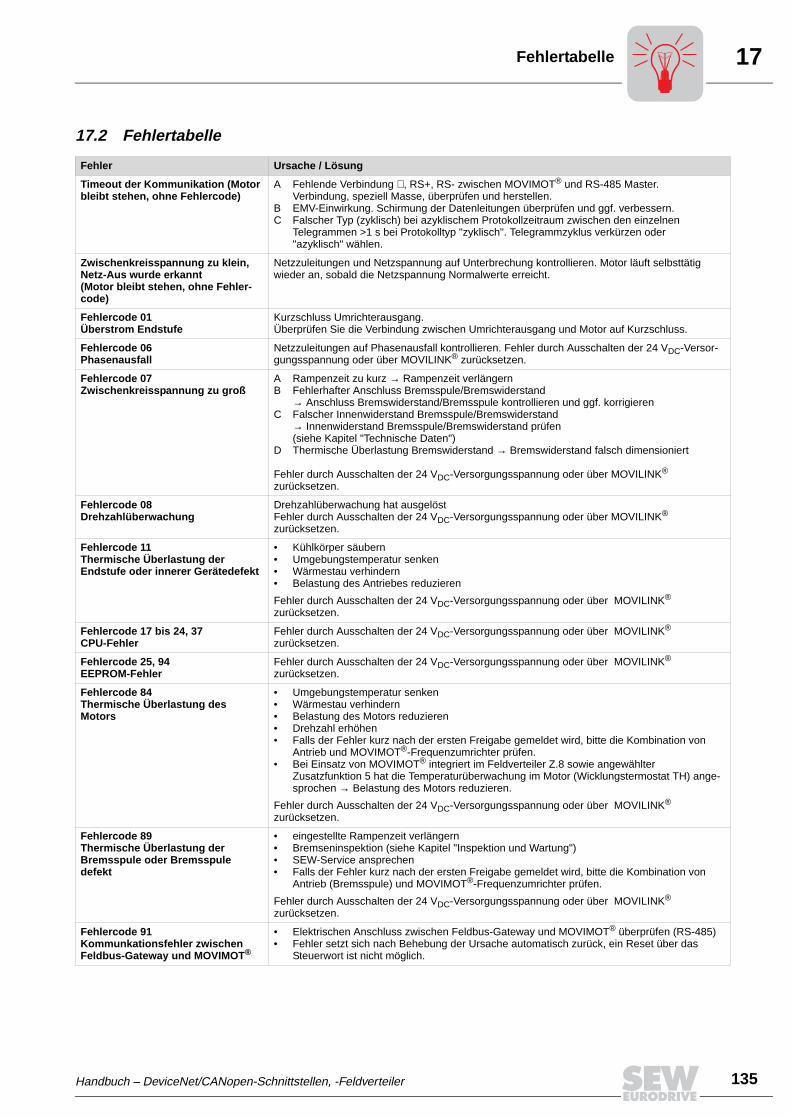
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 135
17Fehlertabelle
17.2 Fehlertabelle
Fehler Ursache / Lösung
Timeout der Kommunikation (Motor bleibt stehen, ohne Fehlercode)
A Fehlende Verbindung ⊥ , RS+, RS- zwischen MOVIMOT® und RS-485 Master. Verbindung, speziell Masse, überprüfen und herstellen.
B EMV-Einwirkung. Schirmung der Datenleitungen überprüfen und ggf. verbessern.C Falscher Typ (zyklisch) bei azyklischem Protokollzeitraum zwischen den einzelnen
Telegrammen >1 s bei Protokolltyp "zyklisch". Telegrammzyklus verkürzen oder "azyklisch" wählen.
Zwischenkreisspannung zu klein, Netz-Aus wurde erkannt(Motor bleibt stehen, ohne Fehler-code)
Netzzuleitungen und Netzspannung auf Unterbrechung kontrollieren. Motor läuft selbsttätig wieder an, sobald die Netzspannung Normalwerte erreicht.
Fehlercode 01 Überstrom Endstufe
Kurzschluss Umrichterausgang.Überprüfen Sie die Verbindung zwischen Umrichterausgang und Motor auf Kurzschluss.
Fehlercode 06 Phasenausfall
Netzzuleitungen auf Phasenausfall kontrollieren. Fehler durch Ausschalten der 24 VDC-Versor-gungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 07 Zwischenkreisspannung zu groß
A Rampenzeit zu kurz → Rampenzeit verlängernB Fehlerhafter Anschluss Bremsspule/Bremswiderstand
→ Anschluss Bremswiderstand/Bremsspule kontrollieren und ggf. korrigierenC Falscher Innenwiderstand Bremsspule/Bremswiderstand
→ Innenwiderstand Bremsspule/Bremswiderstand prüfen (siehe Kapitel "Technische Daten")
D Thermische Überlastung Bremswiderstand → Bremswiderstand falsch dimensioniert
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 08Drehzahlüberwachung
Drehzahlüberwachung hat ausgelöstFehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 11 Thermische Überlastung der Endstufe oder innerer Gerätedefekt
• Kühlkörper säubern• Umgebungstemperatur senken• Wärmestau verhindern• Belastung des Antriebes reduzieren
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 17 bis 24, 37CPU-Fehler
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 25, 94EEPROM-Fehler
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 84 Thermische Überlastung des Motors
• Umgebungstemperatur senken• Wärmestau verhindern• Belastung des Motors reduzieren • Drehzahl erhöhen• Falls der Fehler kurz nach der ersten Freigabe gemeldet wird, bitte die Kombination von
Antrieb und MOVIMOT®-Frequenzumrichter prüfen.• Bei Einsatz von MOVIMOT® integriert im Feldverteiler Z.8 sowie angewählter
Zusatzfunktion 5 hat die Temperaturüberwachung im Motor (Wicklungstermostat TH) ange-sprochen → Belastung des Motors reduzieren.
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 89 Thermische Überlastung der Bremsspule oder Bremsspule defekt
• eingestellte Rampenzeit verlängern• Bremseninspektion (siehe Kapitel "Inspektion und Wartung")• SEW-Service ansprechen• Falls der Fehler kurz nach der ersten Freigabe gemeldet wird, bitte die Kombination von
Antrieb (Bremsspule) und MOVIMOT®-Frequenzumrichter prüfen.
Fehler durch Ausschalten der 24 VDC-Versorgungsspannung oder über MOVILINK® zurücksetzen.
Fehlercode 91 Kommunkationsfehler zwischen Feldbus-Gateway und MOVIMOT®
• Elektrischen Anschluss zwischen Feldbus-Gateway und MOVIMOT® überprüfen (RS-485)• Fehler setzt sich nach Behebung der Ursache automatisch zurück, ein Reset über das
Steuerwort ist nicht möglich.
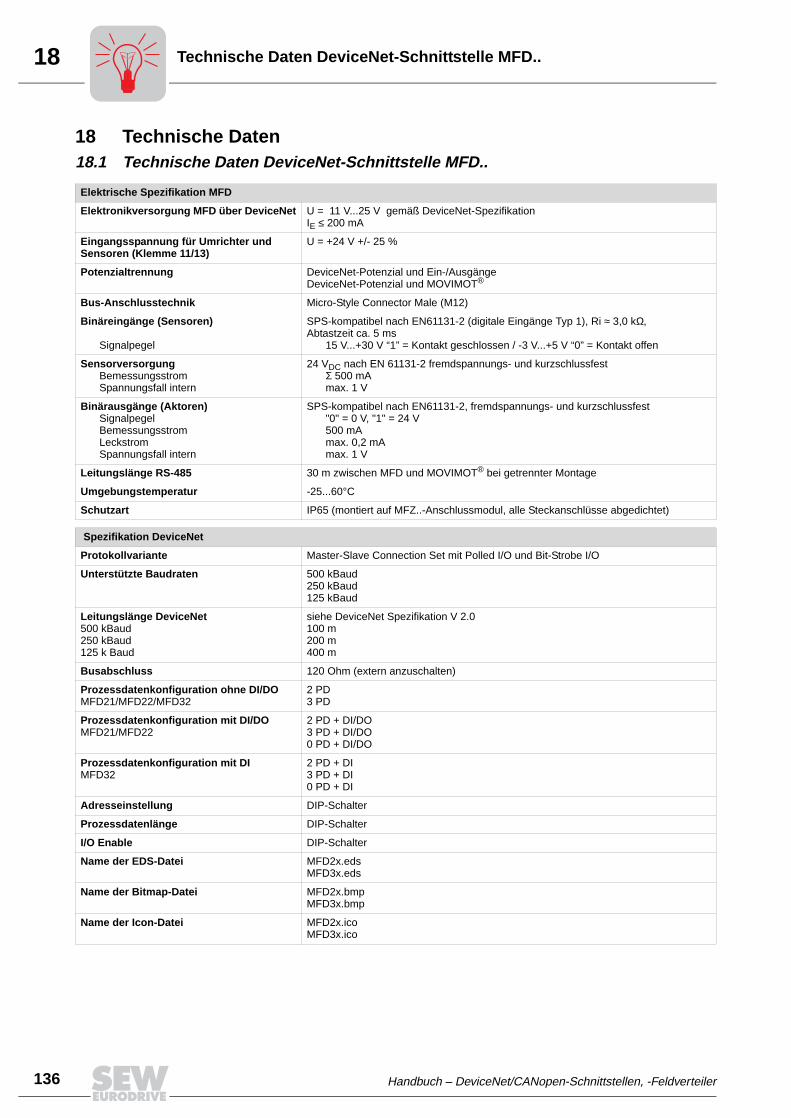
18
136 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Technische Daten DeviceNet-Schnittstelle MFD..
18 Technische Daten18.1 Technische Daten DeviceNet-Schnittstelle MFD..
Elektrische Spezifikation MFD
Elektronikversorgung MFD über DeviceNet U = 11 V...25 V gemäß DeviceNet-SpezifikationIE ≤ 200 mA
Eingangsspannung für Umrichter und Sensoren (Klemme 11/13)
U = +24 V +/- 25 %
Potenzialtrennung DeviceNet-Potenzial und Ein-/AusgängeDeviceNet-Potenzial und MOVIMOT®
Bus-Anschlusstechnik Micro-Style Connector Male (M12)
Binäreingänge (Sensoren)
Signalpegel
SPS-kompatibel nach EN61131-2 (digitale Eingänge Typ 1), Ri ≈ 3,0 kΩ, Abtastzeit ca. 5 ms
15 V...+30 V “1” = Kontakt geschlossen / -3 V...+5 V “0” = Kontakt offen
SensorversorgungBemessungsstromSpannungsfall intern
24 VDC nach EN 61131-2 fremdspannungs- und kurzschlussfestΣ 500 mAmax. 1 V
Binärausgänge (Aktoren)SignalpegelBemessungsstromLeckstromSpannungsfall intern
SPS-kompatibel nach EN61131-2, fremdspannungs- und kurzschlussfest"0" = 0 V, "1" = 24 V500 mA max. 0,2 mAmax. 1 V
Leitungslänge RS-485 30 m zwischen MFD und MOVIMOT® bei getrennter Montage
Umgebungstemperatur -25...60°C
Schutzart IP65 (montiert auf MFZ..-Anschlussmodul, alle Steckanschlüsse abgedichtet)
Spezifikation DeviceNet
Protokollvariante Master-Slave Connection Set mit Polled I/O und Bit-Strobe I/O
Unterstützte Baudraten 500 kBaud250 kBaud125 kBaud
Leitungslänge DeviceNet500 kBaud250 kBaud125 k Baud
siehe DeviceNet Spezifikation V 2.0100 m200 m400 m
Busabschluss 120 Ohm (extern anzuschalten)
Prozessdatenkonfiguration ohne DI/DOMFD21/MFD22/MFD32
2 PD3 PD
Prozessdatenkonfiguration mit DI/DOMFD21/MFD22
2 PD + DI/DO3 PD + DI/DO0 PD + DI/DO
Prozessdatenkonfiguration mit DIMFD32
2 PD + DI3 PD + DI0 PD + DI
Adresseinstellung DIP-Schalter
Prozessdatenlänge DIP-Schalter
I/O Enable DIP-Schalter
Name der EDS-Datei MFD2x.edsMFD3x.eds
Name der Bitmap-Datei MFD2x.bmpMFD3x.bmp
Name der Icon-Datei MFD2x.icoMFD3x.ico
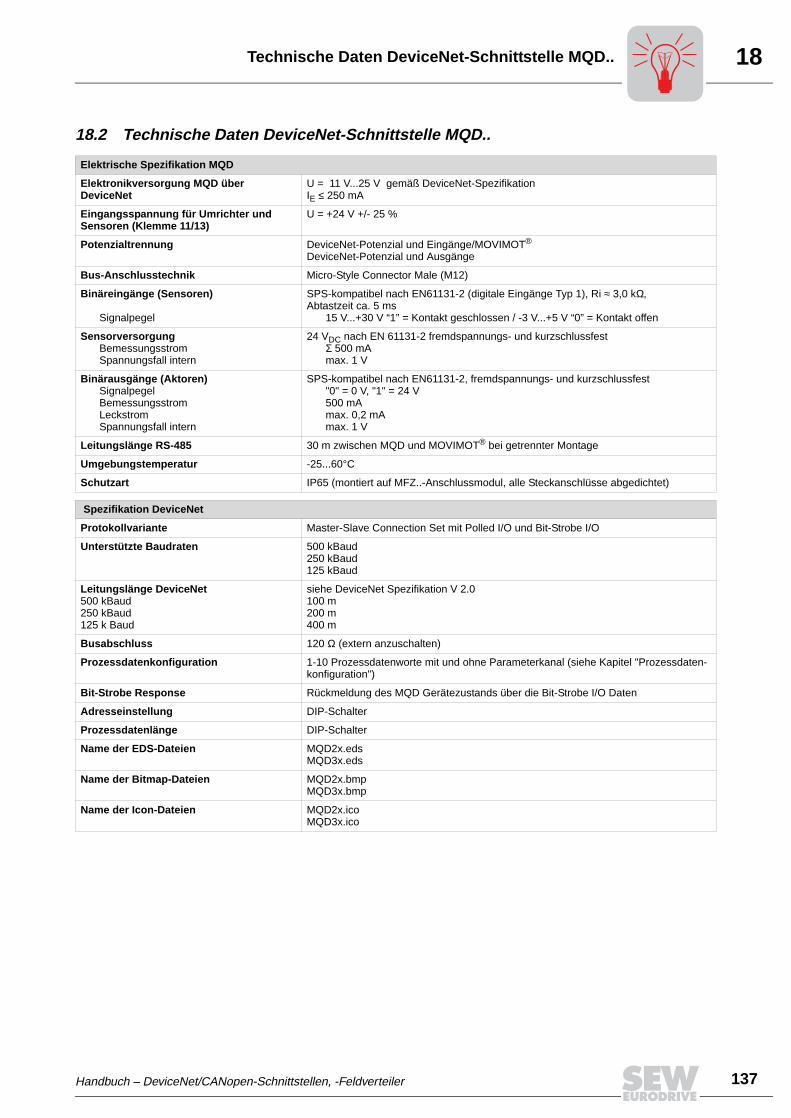
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 137
18Technische Daten DeviceNet-Schnittstelle MQD..
18.2 Technische Daten DeviceNet-Schnittstelle MQD..
Elektrische Spezifikation MQD
Elektronikversorgung MQD über DeviceNet
U = 11 V...25 V gemäß DeviceNet-SpezifikationIE ≤ 250 mA
Eingangsspannung für Umrichter und Sensoren (Klemme 11/13)
U = +24 V +/- 25 %
Potenzialtrennung DeviceNet-Potenzial und Eingänge/MOVIMOT®
DeviceNet-Potenzial und Ausgänge
Bus-Anschlusstechnik Micro-Style Connector Male (M12)
Binäreingänge (Sensoren)
Signalpegel
SPS-kompatibel nach EN61131-2 (digitale Eingänge Typ 1), Ri ≈ 3,0 kΩ, Abtastzeit ca. 5 ms
15 V...+30 V “1” = Kontakt geschlossen / -3 V...+5 V “0” = Kontakt offen
SensorversorgungBemessungsstromSpannungsfall intern
24 VDC nach EN 61131-2 fremdspannungs- und kurzschlussfestΣ 500 mAmax. 1 V
Binärausgänge (Aktoren)SignalpegelBemessungsstromLeckstromSpannungsfall intern
SPS-kompatibel nach EN61131-2, fremdspannungs- und kurzschlussfest"0" = 0 V, "1" = 24 V500 mA max. 0,2 mAmax. 1 V
Leitungslänge RS-485 30 m zwischen MQD und MOVIMOT® bei getrennter Montage
Umgebungstemperatur -25...60°C
Schutzart IP65 (montiert auf MFZ..-Anschlussmodul, alle Steckanschlüsse abgedichtet)
Spezifikation DeviceNet
Protokollvariante Master-Slave Connection Set mit Polled I/O und Bit-Strobe I/O
Unterstützte Baudraten 500 kBaud250 kBaud125 kBaud
Leitungslänge DeviceNet500 kBaud250 kBaud125 k Baud
siehe DeviceNet Spezifikation V 2.0100 m200 m400 m
Busabschluss 120 Ω (extern anzuschalten)
Prozessdatenkonfiguration 1-10 Prozessdatenworte mit und ohne Parameterkanal (siehe Kapitel "Prozessdaten-konfiguration")
Bit-Strobe Response Rückmeldung des MQD Gerätezustands über die Bit-Strobe I/O Daten
Adresseinstellung DIP-Schalter
Prozessdatenlänge DIP-Schalter
Name der EDS-Dateien MQD2x.edsMQD3x.eds
Name der Bitmap-Dateien MQD2x.bmpMQD3x.bmp
Name der Icon-Dateien MQD2x.icoMQD3x.ico
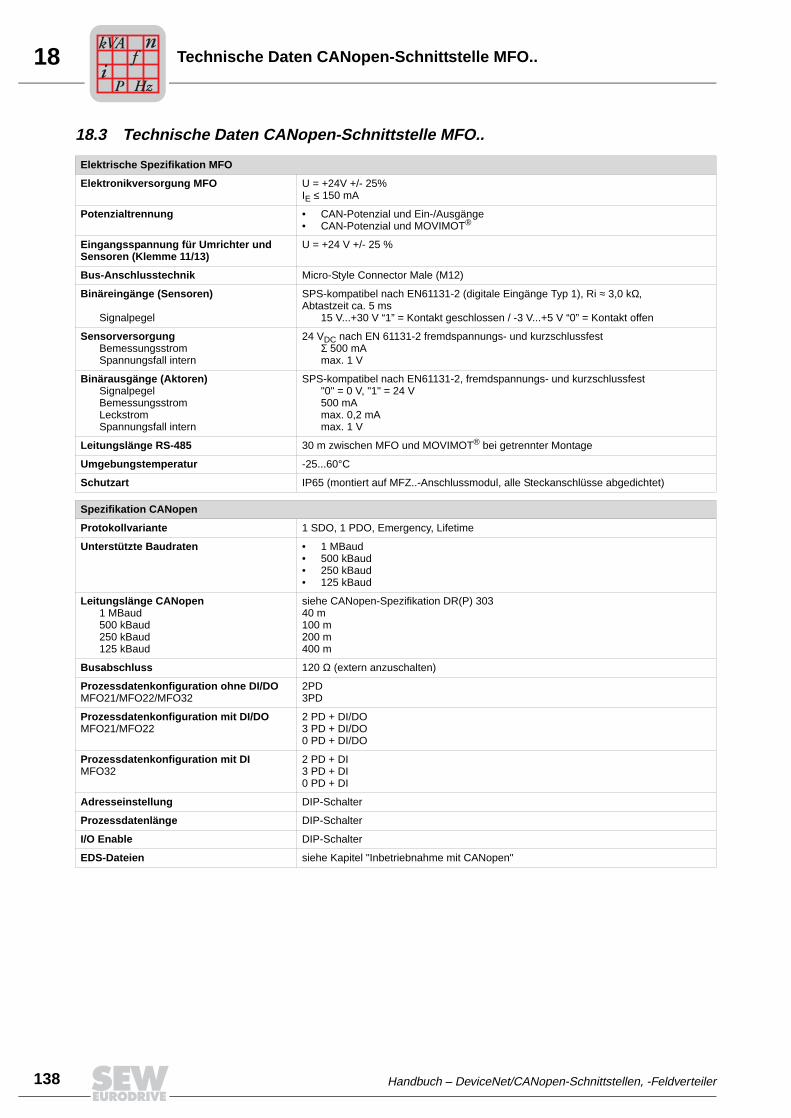
18
138 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Technische Daten CANopen-Schnittstelle MFO..
18.3 Technische Daten CANopen-Schnittstelle MFO..
Elektrische Spezifikation MFO
Elektronikversorgung MFO U = +24V +/- 25%IE ≤ 150 mA
Potenzialtrennung • CAN-Potenzial und Ein-/Ausgänge• CAN-Potenzial und MOVIMOT®
Eingangsspannung für Umrichter und Sensoren (Klemme 11/13)
U = +24 V +/- 25 %
Bus-Anschlusstechnik Micro-Style Connector Male (M12)
Binäreingänge (Sensoren)
Signalpegel
SPS-kompatibel nach EN61131-2 (digitale Eingänge Typ 1), Ri ≈ 3,0 kΩ, Abtastzeit ca. 5 ms
15 V...+30 V “1” = Kontakt geschlossen / -3 V...+5 V “0” = Kontakt offen
SensorversorgungBemessungsstromSpannungsfall intern
24 VDC nach EN 61131-2 fremdspannungs- und kurzschlussfestΣ 500 mAmax. 1 V
Binärausgänge (Aktoren)SignalpegelBemessungsstromLeckstromSpannungsfall intern
SPS-kompatibel nach EN61131-2, fremdspannungs- und kurzschlussfest"0" = 0 V, "1" = 24 V500 mA max. 0,2 mAmax. 1 V
Leitungslänge RS-485 30 m zwischen MFO und MOVIMOT® bei getrennter Montage
Umgebungstemperatur -25...60°C
Schutzart IP65 (montiert auf MFZ..-Anschlussmodul, alle Steckanschlüsse abgedichtet)
Spezifikation CANopen
Protokollvariante 1 SDO, 1 PDO, Emergency, Lifetime
Unterstützte Baudraten • 1 MBaud• 500 kBaud• 250 kBaud• 125 kBaud
Leitungslänge CANopen1 MBaud500 kBaud250 kBaud125 kBaud
siehe CANopen-Spezifikation DR(P) 30340 m100 m200 m400 m
Busabschluss 120 Ω (extern anzuschalten)
Prozessdatenkonfiguration ohne DI/DOMFO21/MFO22/MFO32
2PD3PD
Prozessdatenkonfiguration mit DI/DOMFO21/MFO22
2 PD + DI/DO3 PD + DI/DO0 PD + DI/DO
Prozessdatenkonfiguration mit DIMFO32
2 PD + DI3 PD + DI0 PD + DI
Adresseinstellung DIP-Schalter
Prozessdatenlänge DIP-Schalter
I/O Enable DIP-Schalter
EDS-Dateien siehe Kapitel "Inbetriebnahme mit CANopen"
Pi
fkVA
Hz
n
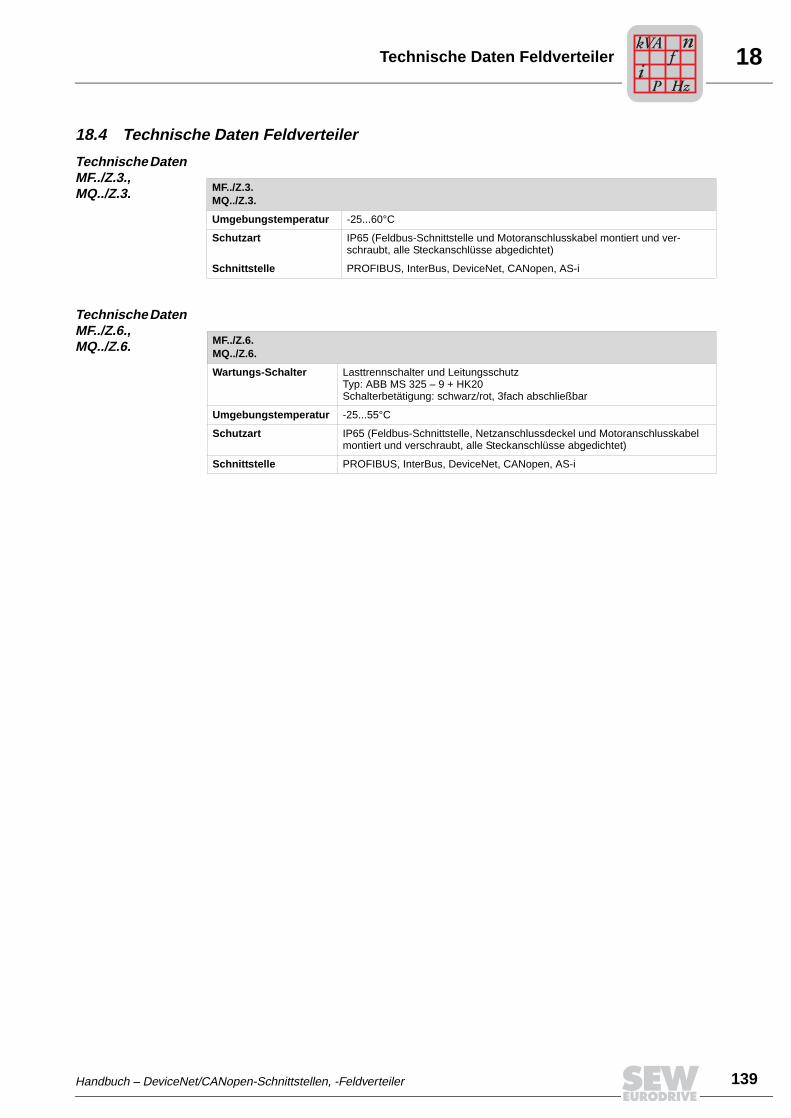
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 139
18Technische Daten Feldverteiler
18.4 Technische Daten Feldverteiler
Technische Daten MF../Z.3., MQ../Z.3.
Technische Daten MF../Z.6., MQ../Z.6.
MF../Z.3.MQ../Z.3.
Umgebungstemperatur -25...60°C
Schutzart IP65 (Feldbus-Schnittstelle und Motoranschlusskabel montiert und ver-schraubt, alle Steckanschlüsse abgedichtet)
Schnittstelle PROFIBUS, InterBus, DeviceNet, CANopen, AS-i
MF../Z.6.MQ../Z.6.
Wartungs-Schalter Lasttrennschalter und LeitungsschutzTyp: ABB MS 325 – 9 + HK20Schalterbetätigung: schwarz/rot, 3fach abschließbar
Umgebungstemperatur -25...55°C
Schutzart IP65 (Feldbus-Schnittstelle, Netzanschlussdeckel und Motoranschlusskabel montiert und verschraubt, alle Steckanschlüsse abgedichtet)
Schnittstelle PROFIBUS, InterBus, DeviceNet, CANopen, AS-i
Pi
fkVA
Hz
n
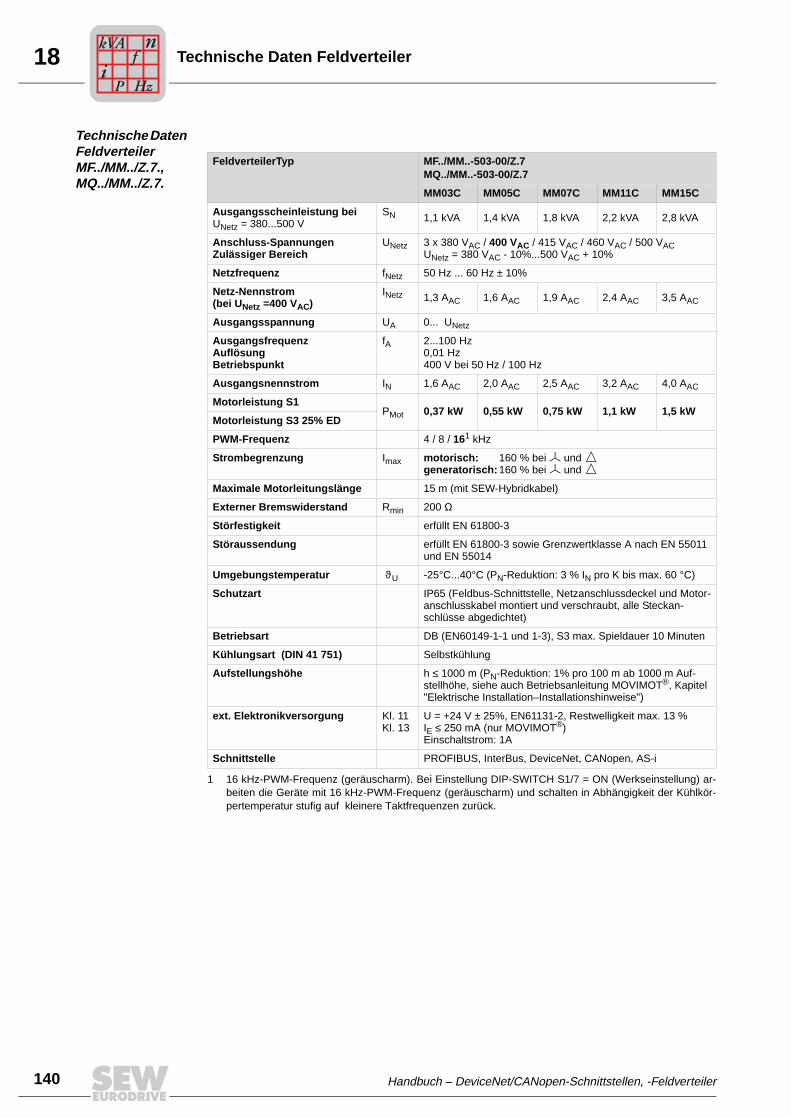
18
140 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Technische Daten Feldverteiler
Technische Daten Feldverteiler MF../MM../Z.7., MQ../MM../Z.7.
FeldverteilerTyp MF../MM..-503-00/Z.7MQ../MM..-503-00/Z.7
MM03C MM05C MM07C MM11C MM15C
Ausgangsscheinleistung bei UNetz = 380...500 V
SN 1,1 kVA 1,4 kVA 1,8 kVA 2,2 kVA 2,8 kVA
Anschluss-SpannungenZulässiger Bereich
UNetz 3 x 380 VAC / 400 VAC / 415 VAC / 460 VAC / 500 VAC UNetz = 380 VAC - 10%...500 VAC + 10%
Netzfrequenz fNetz 50 Hz ... 60 Hz ± 10%
Netz-Nennstrom(bei UNetz =400 VAC)
INetz 1,3 AAC 1,6 AAC 1,9 AAC 2,4 AAC 3,5 AAC
Ausgangsspannung UA 0... UNetz
AusgangsfrequenzAuflösungBetriebspunkt
fA 2...100 Hz0,01 Hz400 V bei 50 Hz / 100 Hz
Ausgangsnennstrom IN 1,6 AAC 2,0 AAC 2,5 AAC 3,2 AAC 4,0 AAC
Motorleistung S1PMot 0,37 kW 0,55 kW 0,75 kW 1,1 kW 1,5 kW
Motorleistung S3 25% ED
PWM-Frequenz 4 / 8 / 161 kHz
1 16 kHz-PWM-Frequenz (geräuscharm). Bei Einstellung DIP-SWITCH S1/7 = ON (Werkseinstellung) ar-beiten die Geräte mit 16 kHz-PWM-Frequenz (geräuscharm) und schalten in Abhängigkeit der Kühlkör-pertemperatur stufig auf kleinere Taktfrequenzen zurück.
Strombegrenzung Imax motorisch: 160 % bei und generatorisch: 160 % bei und
Maximale Motorleitungslänge 15 m (mit SEW-Hybridkabel)
Externer Bremswiderstand Rmin 200 Ω
Störfestigkeit erfüllt EN 61800-3
Störaussendung erfüllt EN 61800-3 sowie Grenzwertklasse A nach EN 55011 und EN 55014
Umgebungstemperatur ϑU -25°C...40°C (PN-Reduktion: 3 % IN pro K bis max. 60 °C)
Schutzart IP65 (Feldbus-Schnittstelle, Netzanschlussdeckel und Motor-anschlusskabel montiert und verschraubt, alle Steckan-schlüsse abgedichtet)
Betriebsart DB (EN60149-1-1 und 1-3), S3 max. Spieldauer 10 Minuten
Kühlungsart (DIN 41 751) Selbstkühlung
Aufstellungshöhe h ≤ 1000 m (PN-Reduktion: 1% pro 100 m ab 1000 m Auf-stellhöhe, siehe auch Betriebsanleitung MOVIMOT®, Kapitel "Elektrische Installation–Installationshinweise")
ext. Elektronikversorgung Kl. 11Kl. 13
U = +24 V ± 25%, EN61131-2, Restwelligkeit max. 13 %IE ≤ 250 mA (nur MOVIMOT®)Einschaltstrom: 1A
Schnittstelle PROFIBUS, InterBus, DeviceNet, CANopen, AS-i
Pi
fkVA
Hz
n
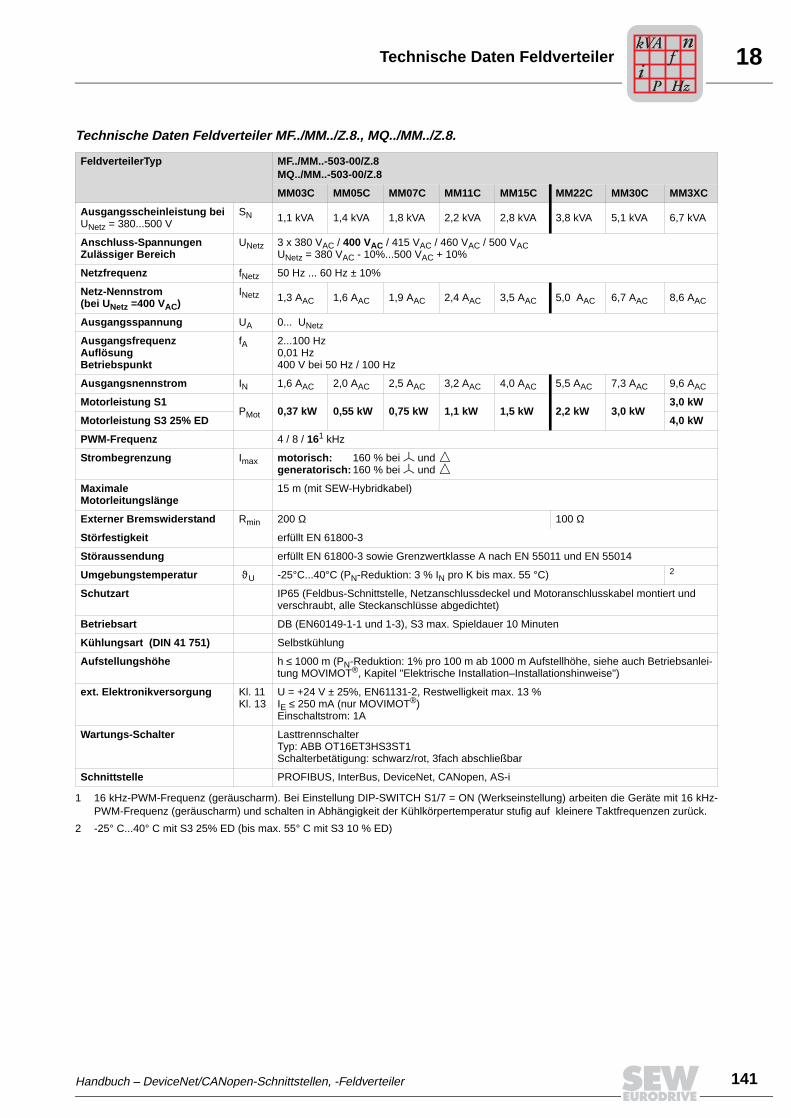
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 141
18Technische Daten Feldverteiler
Technische Daten Feldverteiler MF../MM../Z.8., MQ../MM../Z.8.
FeldverteilerTyp MF../MM..-503-00/Z.8MQ../MM..-503-00/Z.8
MM03C MM05C MM07C MM11C MM15C MM22C MM30C MM3XC
Ausgangsscheinleistung bei UNetz = 380...500 V
SN 1,1 kVA 1,4 kVA 1,8 kVA 2,2 kVA 2,8 kVA 3,8 kVA 5,1 kVA 6,7 kVA
Anschluss-SpannungenZulässiger Bereich
UNetz 3 x 380 VAC / 400 VAC / 415 VAC / 460 VAC / 500 VAC UNetz = 380 VAC - 10%...500 VAC + 10%
Netzfrequenz fNetz 50 Hz ... 60 Hz ± 10%
Netz-Nennstrom(bei UNetz =400 VAC)
INetz 1,3 AAC 1,6 AAC 1,9 AAC 2,4 AAC 3,5 AAC 5,0 AAC 6,7 AAC 8,6 AAC
Ausgangsspannung UA 0... UNetz
AusgangsfrequenzAuflösungBetriebspunkt
fA 2...100 Hz0,01 Hz400 V bei 50 Hz / 100 Hz
Ausgangsnennstrom IN 1,6 AAC 2,0 AAC 2,5 AAC 3,2 AAC 4,0 AAC 5,5 AAC 7,3 AAC 9,6 AAC
Motorleistung S1PMot 0,37 kW 0,55 kW 0,75 kW 1,1 kW 1,5 kW 2,2 kW 3,0 kW
3,0 kW
Motorleistung S3 25% ED 4,0 kW
PWM-Frequenz 4 / 8 / 161 kHz
1 16 kHz-PWM-Frequenz (geräuscharm). Bei Einstellung DIP-SWITCH S1/7 = ON (Werkseinstellung) arbeiten die Geräte mit 16 kHz-PWM-Frequenz (geräuscharm) und schalten in Abhängigkeit der Kühlkörpertemperatur stufig auf kleinere Taktfrequenzen zurück.
Strombegrenzung Imax motorisch: 160 % bei und generatorisch: 160 % bei und
Maximale Motorleitungslänge
15 m (mit SEW-Hybridkabel)
Externer Bremswiderstand Rmin 200 Ω 100 Ω
Störfestigkeit erfüllt EN 61800-3
Störaussendung erfüllt EN 61800-3 sowie Grenzwertklasse A nach EN 55011 und EN 55014
Umgebungstemperatur ϑU -25°C...40°C (PN-Reduktion: 3 % IN pro K bis max. 55 °C) 2
2 -25° C...40° C mit S3 25% ED (bis max. 55° C mit S3 10 % ED)
Schutzart IP65 (Feldbus-Schnittstelle, Netzanschlussdeckel und Motoranschlusskabel montiert und verschraubt, alle Steckanschlüsse abgedichtet)
Betriebsart DB (EN60149-1-1 und 1-3), S3 max. Spieldauer 10 Minuten
Kühlungsart (DIN 41 751) Selbstkühlung
Aufstellungshöhe h ≤ 1000 m (PN-Reduktion: 1% pro 100 m ab 1000 m Aufstellhöhe, siehe auch Betriebsanlei-tung MOVIMOT®, Kapitel "Elektrische Installation–Installationshinweise")
ext. Elektronikversorgung Kl. 11Kl. 13
U = +24 V ± 25%, EN61131-2, Restwelligkeit max. 13 %IE ≤ 250 mA (nur MOVIMOT®)Einschaltstrom: 1A
Wartungs-Schalter Lasttrennschalter Typ: ABB OT16ET3HS3ST1Schalterbetätigung: schwarz/rot, 3fach abschließbar
Schnittstelle PROFIBUS, InterBus, DeviceNet, CANopen, AS-i
Pi
fkVA
Hz
n
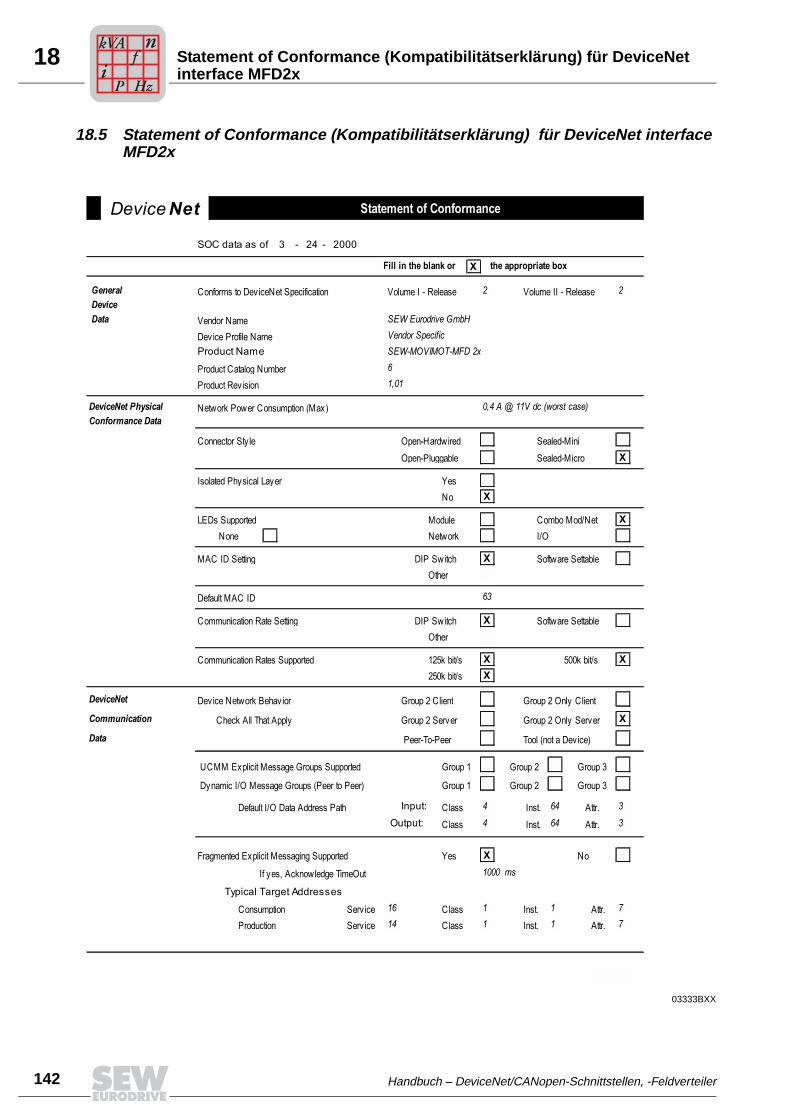
18
142 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
18.5 Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
03333BXX
Device Net Statement of Conformance
SOC data as of 3 - 24 - 2000
Fill in the blank or X the appropriate box
General Conforms to DeviceNet Specification Volume I - Release 2 Volume II - Release 2
Device
Data Vendor Name SEW Eurodrive GmbH
Device Profile Name Vendor Specific
Product Name SEW-MOVIMOT-MFD 2x
Product Catalog Number 6
Product Revision 1,01
DeviceNet Physical Network Power Consumption (Max) 0,4 A @ 11V dc (worst case)
Conformance Data
Connector Sty le Open-Hardwired Sealed-Mini
Open-Pluggable Sealed-Micro X
Isolated Physical Layer Yes
No X
LEDs Supported Module Combo Mod/Net X
None Network I/O
MAC ID Setting DIP Switch X Software Settable
Other
Default MAC ID 63
Communication Rate Setting DIP Switch X Software Settable
Other
Communication Rates Supported 125k bit/s X 500k bit/s X
250k bit/s X
DeviceNet Device Network Behavior Group 2 Client Group 2 Only Client
Communication Check All That Apply Group 2 Server Group 2 Only Server X
Data Peer-To-Peer Tool (not a Device)
UCMM Explicit Message Groups Supported Group 1 Group 2 Group 3
Dynamic I/O Message Groups (Peer to Peer) Group 1 Group 2 Group 3
Default I/O Data Address Path Input: Class 4 Inst. 64 Attr. 3
Output: Class 4 Inst. 64 Attr. 3
Fragmented Explicit Messaging Supported Yes X No
If yes, Acknowledge TimeOut 1000 ms
Typical Target Addresses
Consumption Serv ice 16 Class 1 Inst. 1 Attr. 7
Production Serv ice 14 Class 1 Inst. 1 Attr. 7
1 of 9
Pi
fkVA
Hz
n
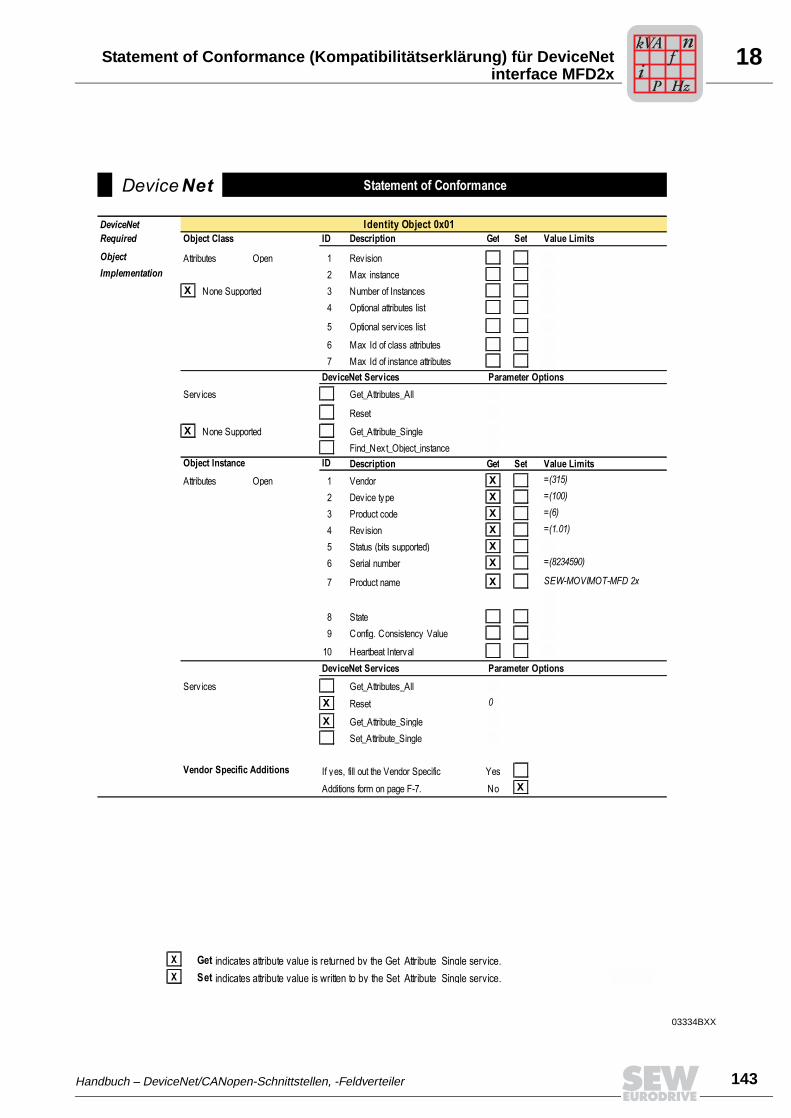
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 143
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD2x
03334BXX
Device Net Statement of Conformance
DeviceNet Identity Object 0x01
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attributes list
5 Optional serv ices list
6 Max Id of class attributes
7 Max Id of instance attributes
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Reset
X None Supported Get_Attribute_Single
Find_Next_Object_instance
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Vendor X =(315)
2 Device type X =(100)
3 Product code X =(6)
4 Revision X =(1.01)
5 Status (bits supported) X
6 Serial number X =(8234590)
7 Product name X SEW-MOVIMOT-MFD 2x
8 State
9 Config. Consistency Value
10 Heartbeat Interval
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
X Reset 0
X Get_Attribute_Single
Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 2 of 9
Pi
fkVA
Hz
n
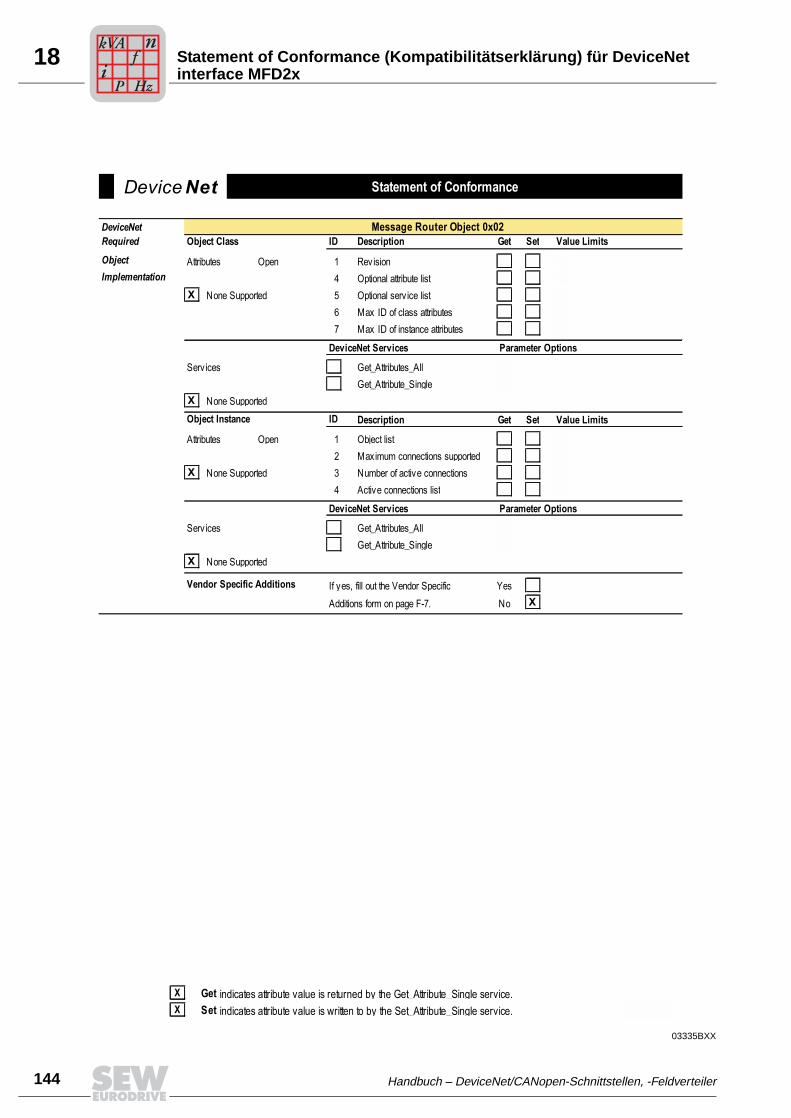
18
144 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
03335BXX
Device Net Statement of Conformance
DeviceNet Message Router Object 0x02
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 4 Optional attribute list
X None Supported 5 Optional serv ice list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Object list
2 Maximum connections supported
X None Supported 3 Number of active connections
4 Active connections list
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Get_Attribute_Single
X None Supported
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 3 of 9
Pi
fkVA
Hz
n

Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 145
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD2x
03336BXX
Device Net Statement of Conformance
DeviceNet DeviceNet Object 0x03
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X =(2)
Implementation None Supported
DeviceNet Services Parameter Options
Serv ices Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 MAC ID X =(0..63)
2 Baud rate X =(0..2)
None Supported 3 BOI X =(0)
4 Bus-off counter X X =(0..255)
5 Allocation information X
6 MAC ID switch changed X =(0)
7 Baud rate switch changed X =(0)
8 MAC ID switch value X =(0..63)
9 Baud rate switch value X =(0..2)
DeviceNet Services Parameter Options
Serv ices X Get_Attribute_Single
X Set_Attribute_Single
None Supported X Allocate M/S connection set
X Release M/S connection set
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 4 of 9
Pi
fkVA
Hz
n
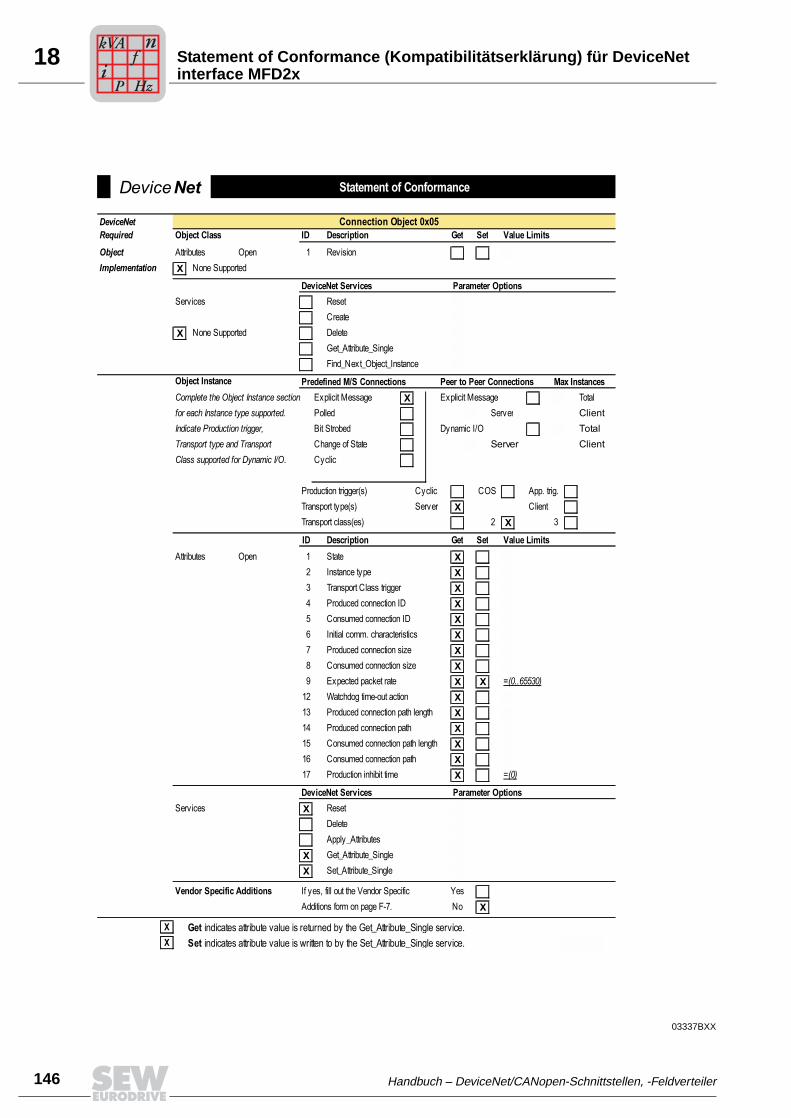
18
146 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
03337BXX
DeviceNet Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Services Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message X Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 8 of 9
Pi
fkVA
Hz
n
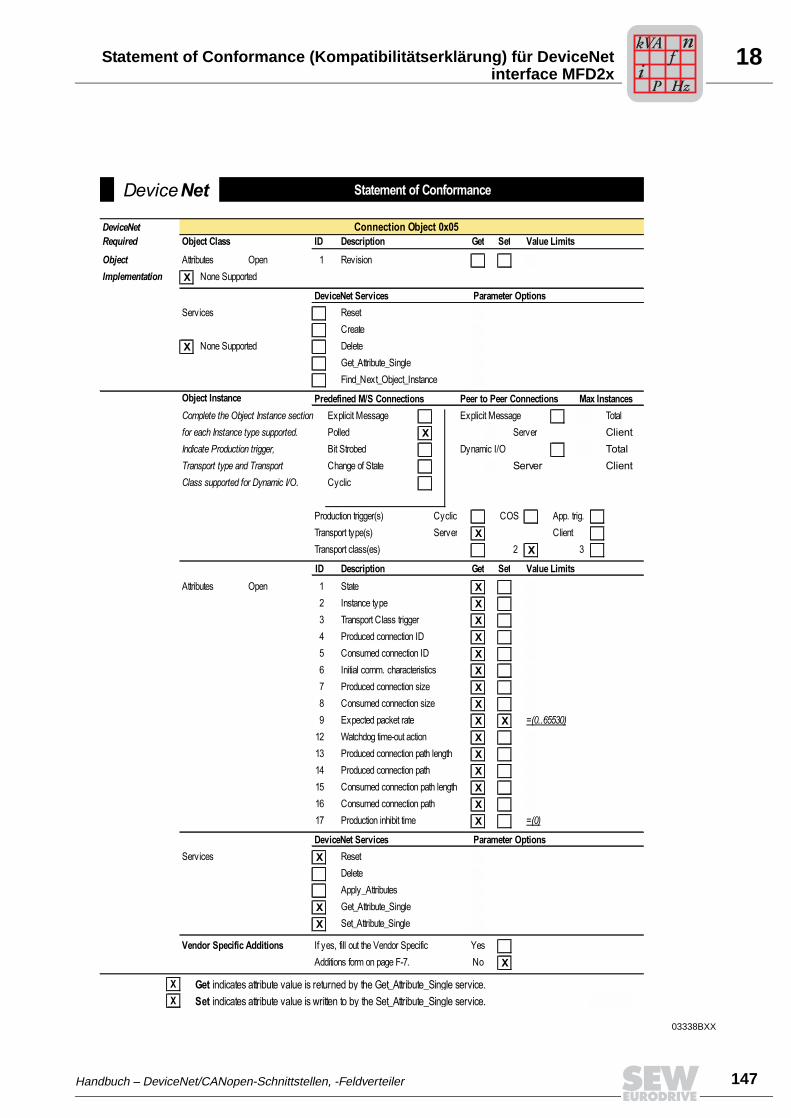
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 147
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD2x
03338BXX
DeviceNet Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Services Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled X Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 6 of 9
Pi
fkVA
Hz
n
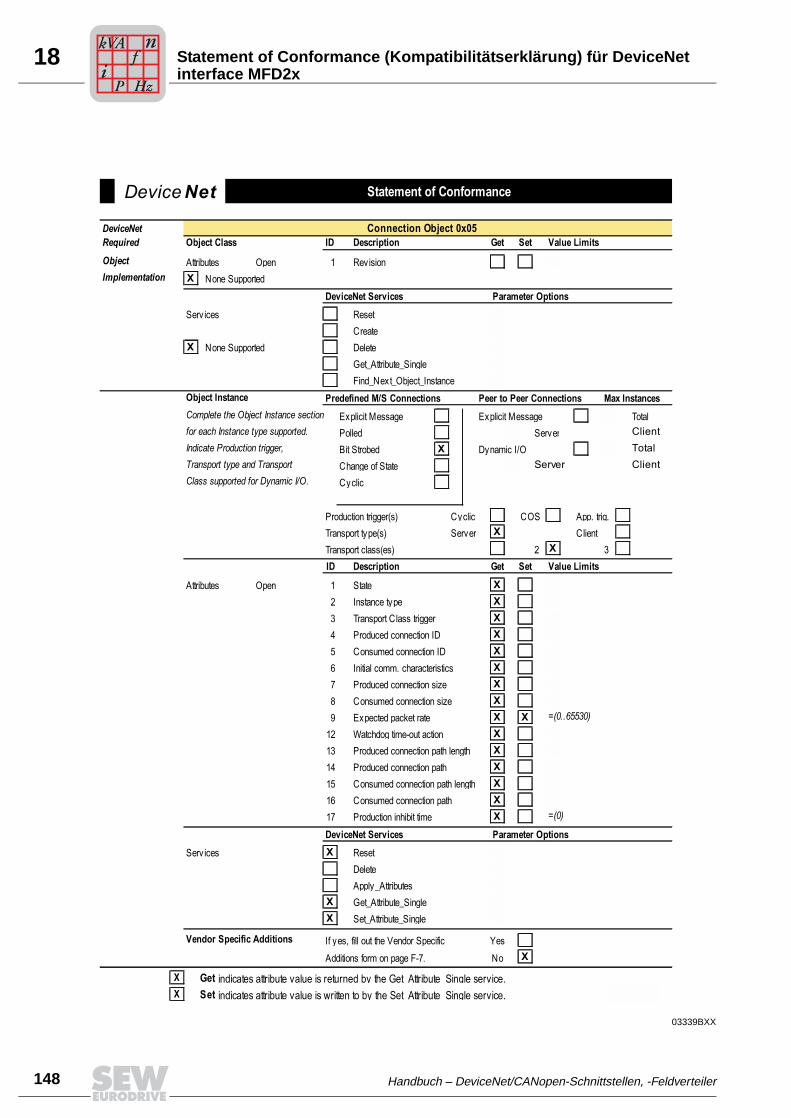
18
148 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
03339BXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Serv ices Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed X Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Serv ices X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 5 of 9
Pi
fkVA
Hz
n
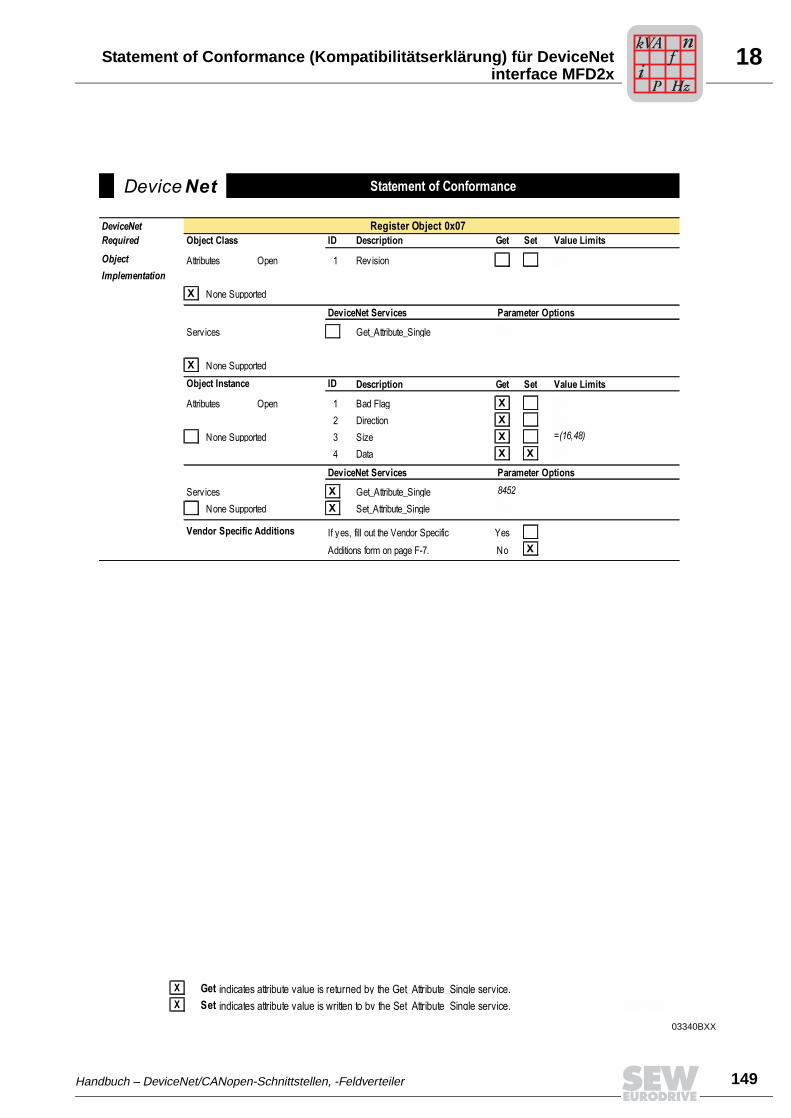
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 149
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD2x
03340BXX
Device Net Statement of Conformance
DeviceNet Register Object 0x07
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation
X None Supported
DeviceNet Services Parameter Options
Serv ices Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Bad Flag X
2 Direction X
None Supported 3 Size X =(16,48)
4 Data X X
DeviceNet Services Parameter Options
Serv ices X Get_Attribute_Single 8452
None Supported X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 7 of 9
Pi
fkVA
Hz
n
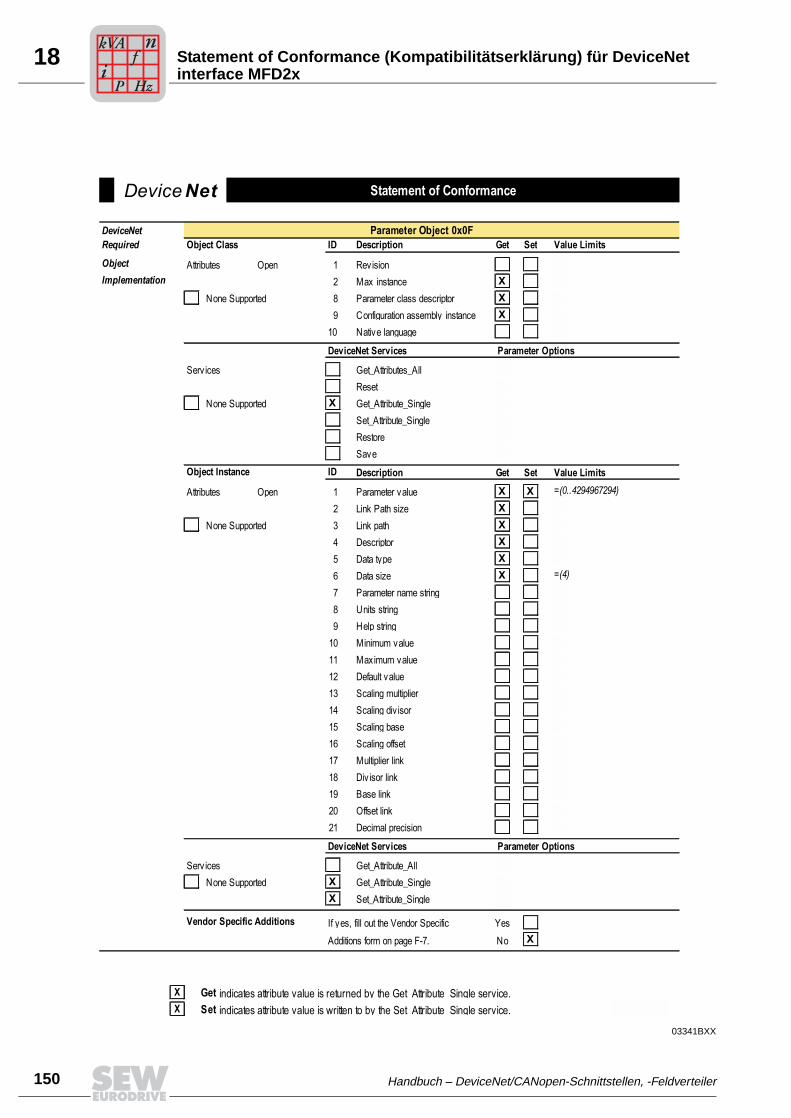
18
150 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD2x
03341BXX
Device Net Statement of Conformance
DeviceNet Parameter Object 0x0F
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance X
None Supported 8 Parameter class descriptor X
9 Configuration assembly instance X
10 Native language
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Reset
None Supported X Get_Attribute_Single
Set_Attribute_Single
Restore
Save
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Parameter value X X =(0..4294967294)
2 Link Path size X
None Supported 3 Link path X
4 Descriptor X
5 Data type X
6 Data size X =(4)
7 Parameter name string
8 Units string
9 Help string
10 Minimum value
11 Maximum value
12 Default value
13 Scaling multiplier
14 Scaling div isor
15 Scaling base
16 Scaling offset
17 Multiplier link
18 Div isor link
19 Base link
20 Offset link
21 Decimal precision
DeviceNet Services Parameter Options
Serv ices Get_Attribute_All
None Supported X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 9 of 9
Pi
fkVA
Hz
n
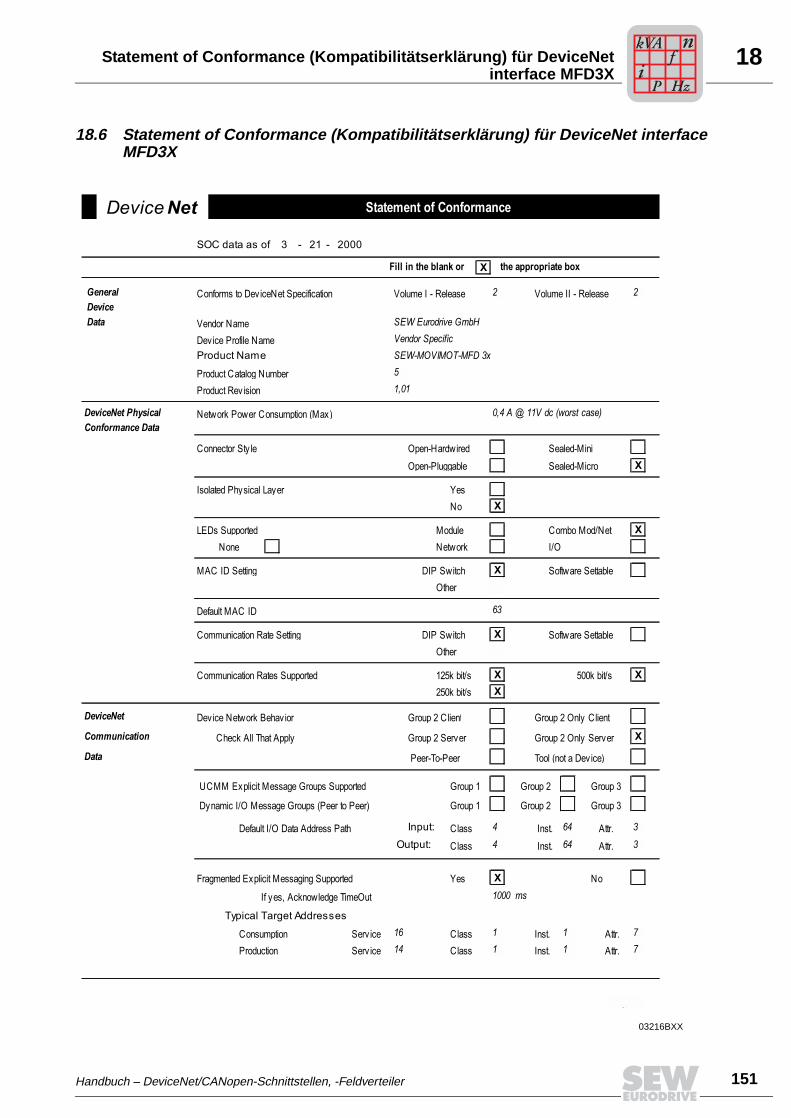
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 151
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD3X
18.6 Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD3X
03216BXX
Device Net Statement of Conformance
SOC data as of 3 - 21 - 2000
Fill in the blank or X the appropriate box
General Conforms to DeviceNet Specification Volume I - Release 2 Volume II - Release 2
Device
Data Vendor Name SEW Eurodrive GmbH
Device Profile Name Vendor Specific
Product Name SEW-MOVIMOT-MFD 3x
Product Catalog Number 5
Product Revision 1,01
DeviceNet Physical Network Power Consumption (Max) 0,4 A @ 11V dc (worst case)
Conformance Data
Connector Sty le Open-Hardwired Sealed-Mini
Open-Pluggable Sealed-Micro X
Isolated Physical Layer Yes
No X
LEDs Supported Module Combo Mod/Net X
None Network I/O
MAC ID Setting DIP Switch X Software Settable
Other
Default MAC ID 63
Communication Rate Setting DIP Switch X Software Settable
Other
Communication Rates Supported 125k bit/s X 500k bit/s X
250k bit/s X
DeviceNet Device Network Behavior Group 2 Client Group 2 Only Client
Communication Check All That Apply Group 2 Server Group 2 Only Server X
Data Peer-To-Peer Tool (not a Device)
UCMM Explicit Message Groups Supported Group 1 Group 2 Group 3
Dynamic I/O Message Groups (Peer to Peer) Group 1 Group 2 Group 3
Default I/O Data Address Path Input: Class 4 Inst. 64 Attr. 3
Output: Class 4 Inst. 64 Attr. 3
Fragmented Explicit Messaging Supported Yes X No
If yes, Acknowledge TimeOut 1000 ms
Typical Target Addresses
Consumption Serv ice 16 Class 1 Inst. 1 Attr. 7
Production Serv ice 14 Class 1 Inst. 1 Attr. 7
1 of 9
Pi
fkVA
Hz
n
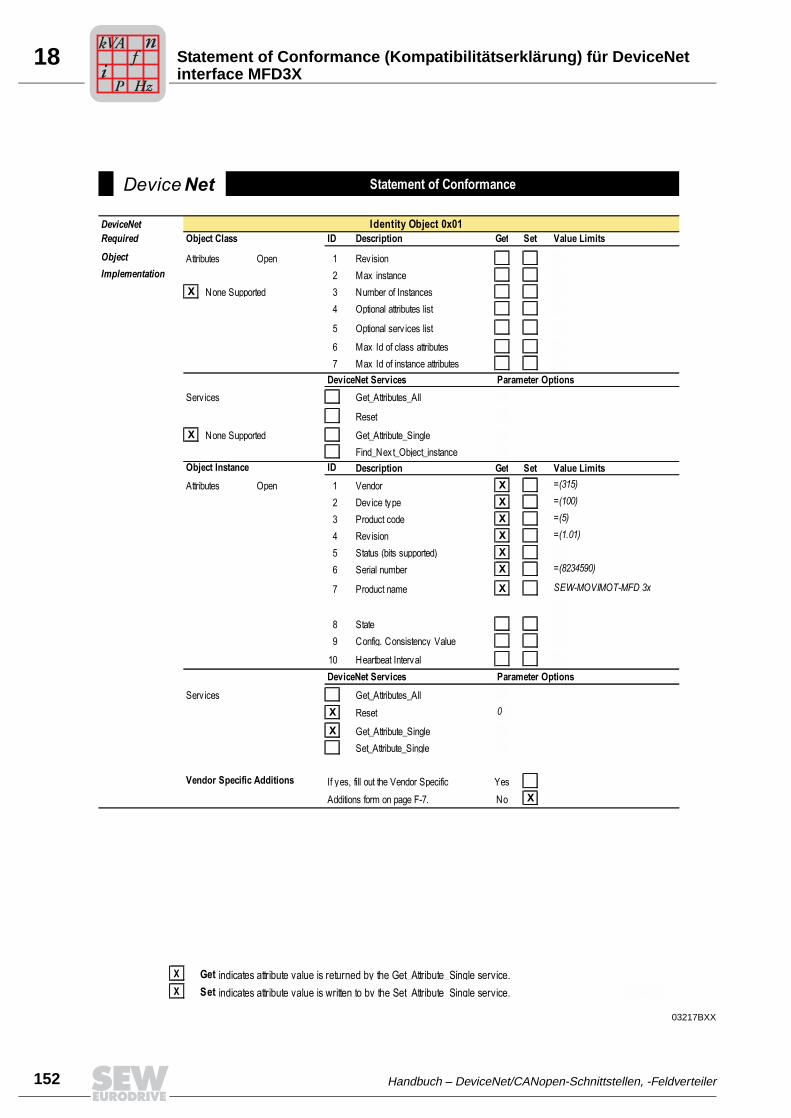
18
152 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD3X
03217BXX
Device Net Statement of Conformance
DeviceNet Identity Object 0x01
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attributes list
5 Optional serv ices list
6 Max Id of class attributes
7 Max Id of instance attributes
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Reset
X None Supported Get_Attribute_Single
Find_Next_Object_instance
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Vendor X =(315)
2 Device type X =(100)
3 Product code X =(5)
4 Revision X =(1.01)
5 Status (bits supported) X
6 Serial number X =(8234590)
7 Product name X SEW-MOVIMOT-MFD 3x
8 State
9 Config. Consistency Value
10 Heartbeat Interval
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
X Reset 0
X Get_Attribute_Single
Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 2 of 9
Pi
fkVA
Hz
n
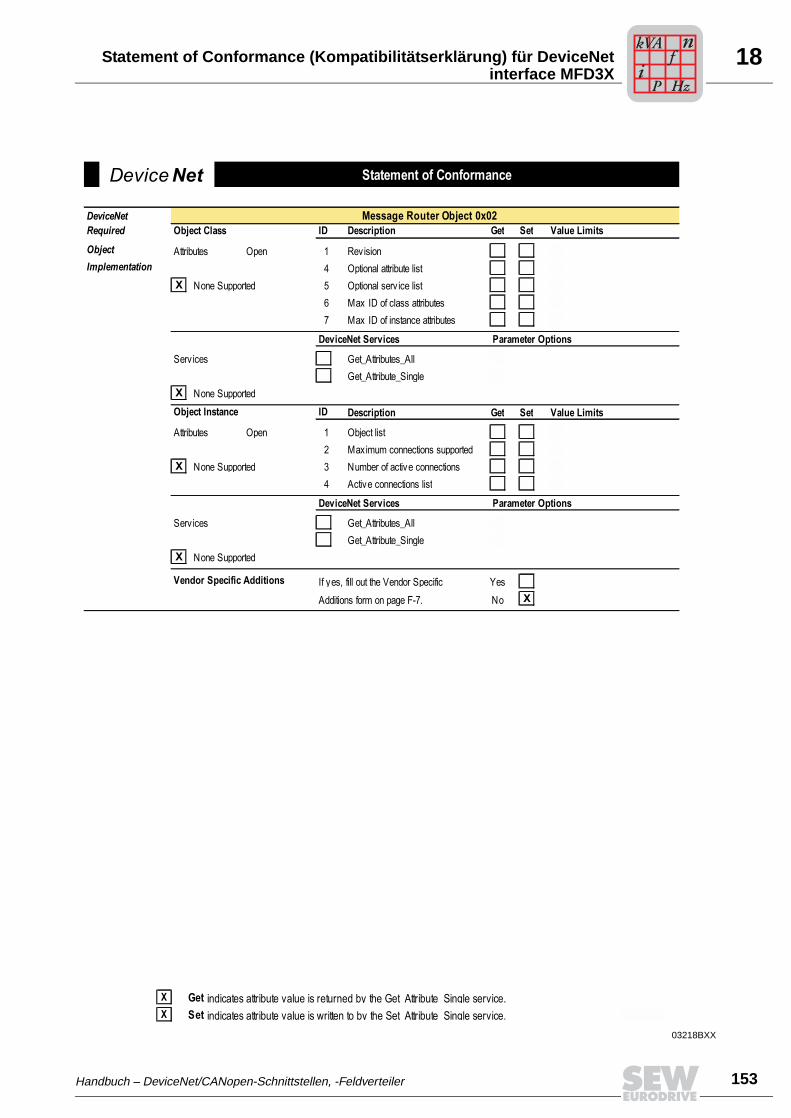
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 153
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD3X
03218BXX
Device Net Statement of Conformance
DeviceNet Message Router Object 0x02
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 4 Optional attribute list
X None Supported 5 Optional serv ice list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Object list
2 Maximum connections supported
X None Supported 3 Number of active connections
4 Active connections list
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Get_Attribute_Single
X None Supported
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 3 of 9
Pi
fkVA
Hz
n
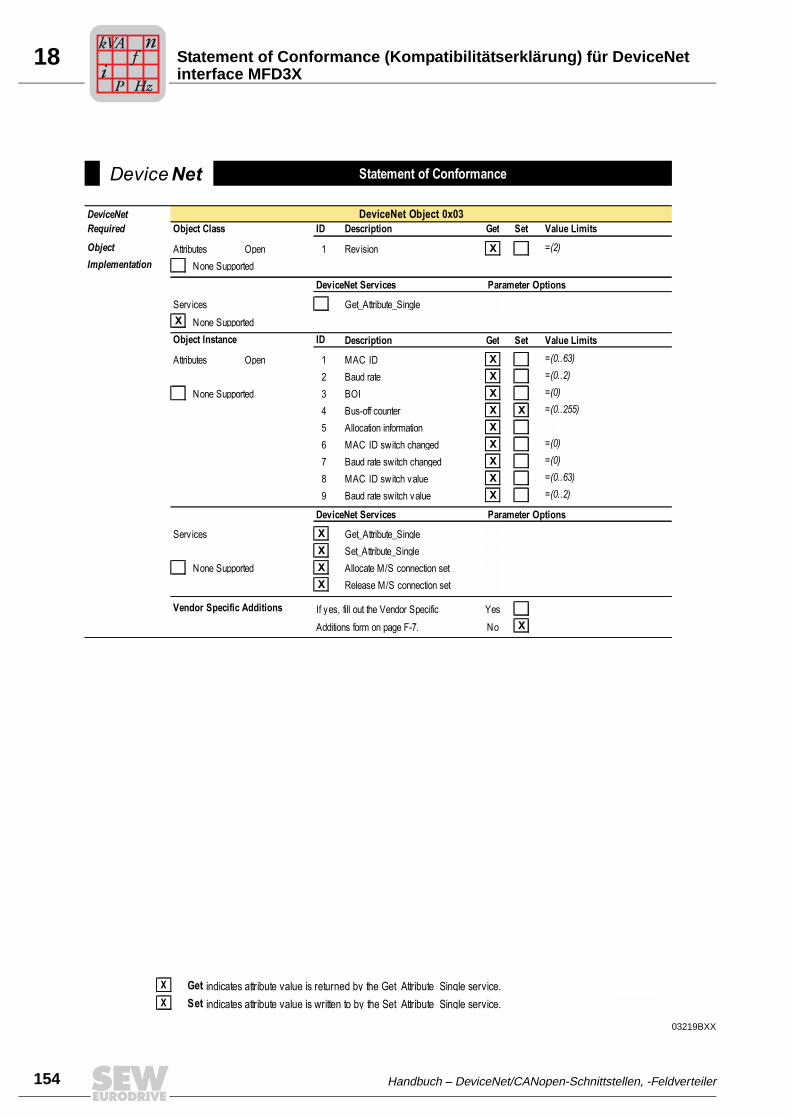
18
154 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD3X
03219BXX
Device Net Statement of Conformance
DeviceNet DeviceNet Object 0x03
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X =(2)
Implementation None Supported
DeviceNet Services Parameter Options
Serv ices Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 MAC ID X =(0..63)
2 Baud rate X =(0..2)
None Supported 3 BOI X =(0)
4 Bus-off counter X X =(0..255)
5 Allocation information X
6 MAC ID switch changed X =(0)
7 Baud rate switch changed X =(0)
8 MAC ID switch value X =(0..63)
9 Baud rate switch value X =(0..2)
DeviceNet Services Parameter Options
Serv ices X Get_Attribute_Single
X Set_Attribute_Single
None Supported X Allocate M/S connection set
X Release M/S connection set
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 4 of 9
Pi
fkVA
Hz
n
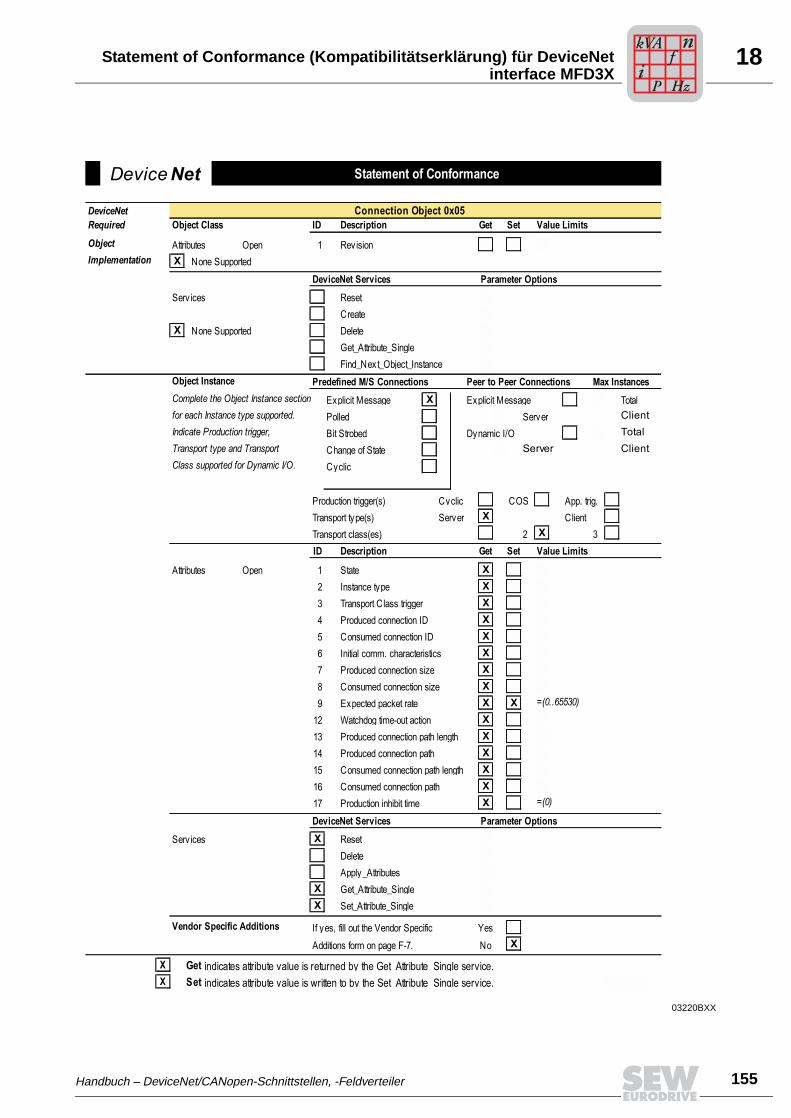
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 155
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD3X
03220BXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Serv ices Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message X Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Serv ices X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 8 of 9
Pi
fkVA
Hz
n
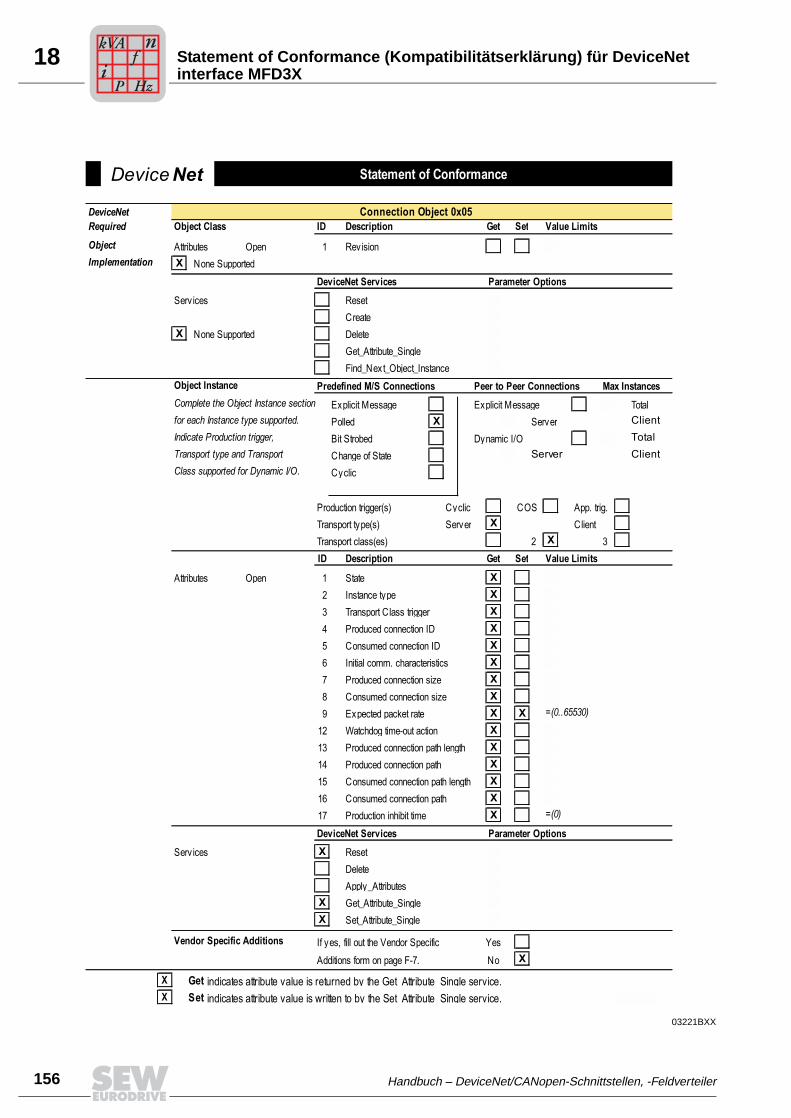
18
156 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD3X
03221BXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Serv ices Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled X Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Serv ices X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 6 of 9
Pi
fkVA
Hz
n
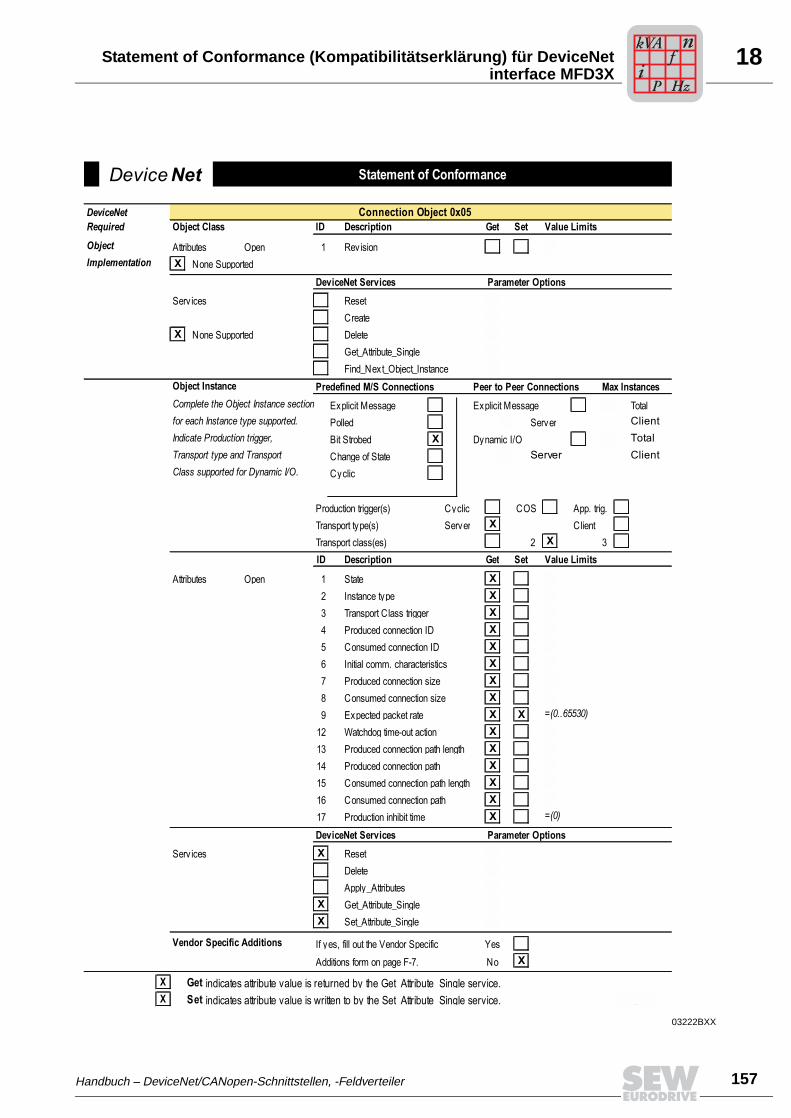
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 157
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD3X
03222BXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported
DeviceNet Services Parameter Options
Serv ices Reset
Create
X None Supported Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed X Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Serv ices X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 5 of 9
Pi
fkVA
Hz
n
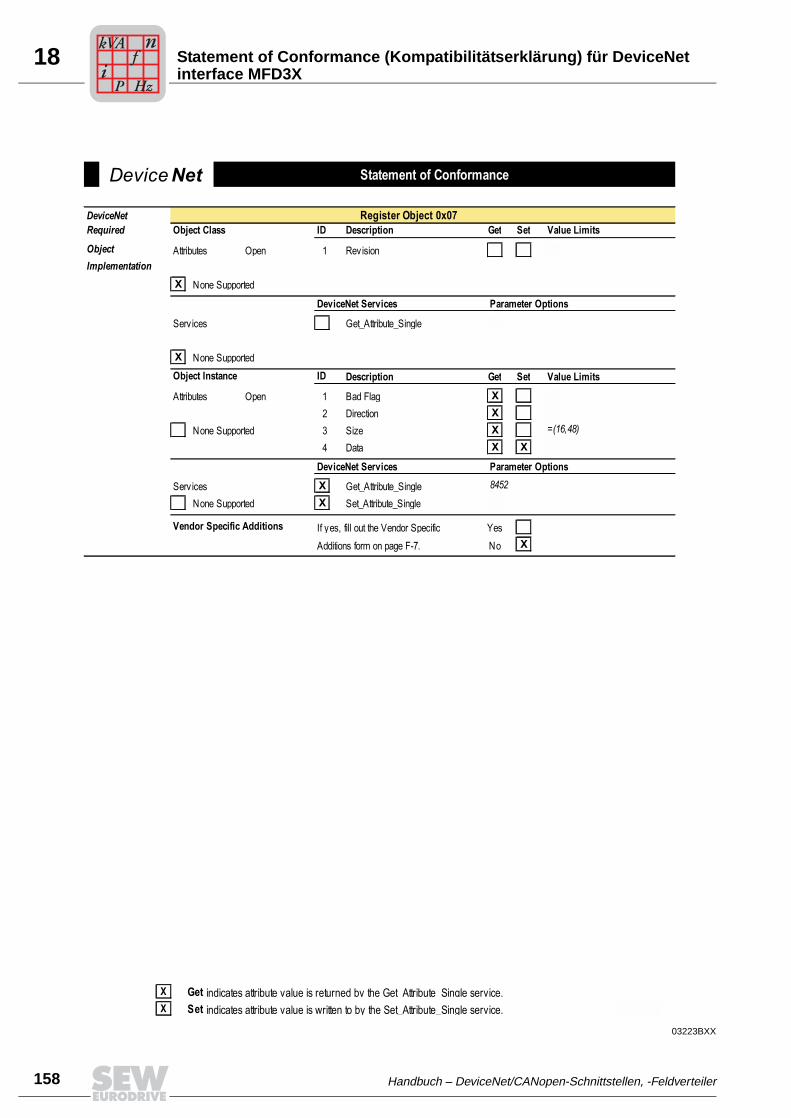
18
158 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MFD3X
03223BXX
Device Net Statement of Conformance
DeviceNet Register Object 0x07
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation
X None Supported
DeviceNet Services Parameter Options
Serv ices Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Bad Flag X
2 Direction X
None Supported 3 Size X =(16,48)
4 Data X X
DeviceNet Services Parameter Options
Serv ices X Get_Attribute_Single 8452
None Supported X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 7 of 9
Pi
fkVA
Hz
n
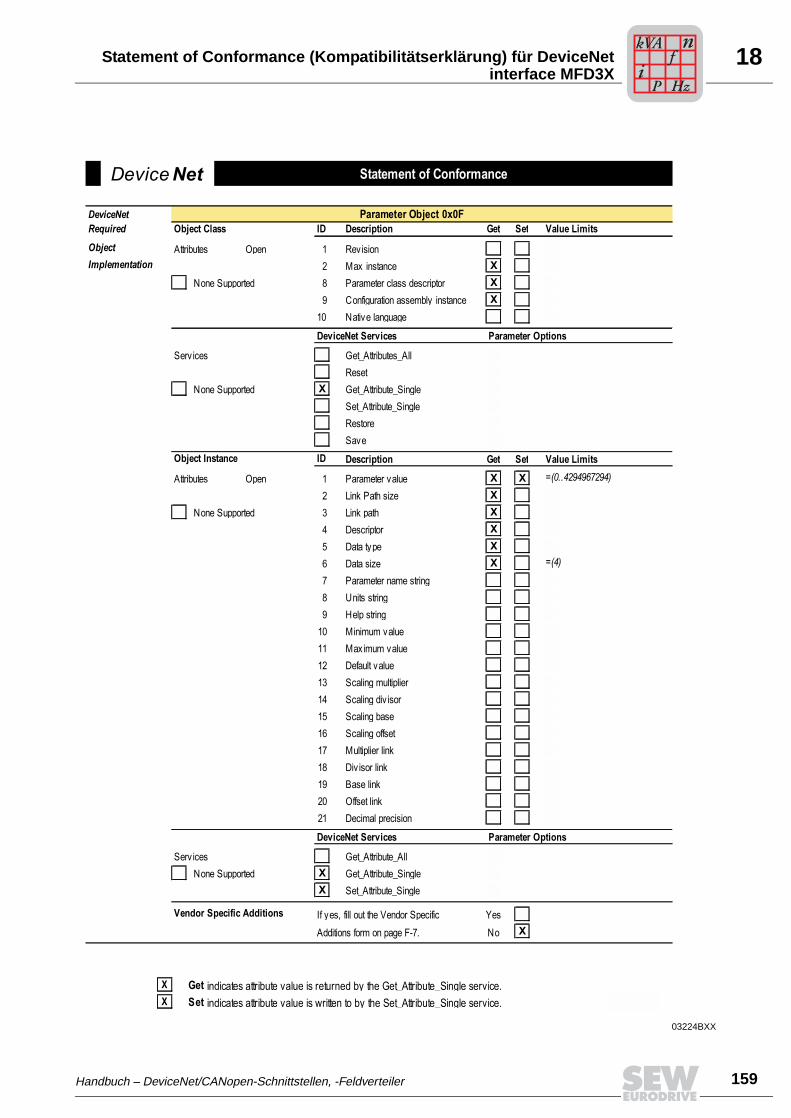
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 159
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MFD3X
03224BXX
Device Net Statement of Conformance
DeviceNet Parameter Object 0x0F
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance X
None Supported 8 Parameter class descriptor X
9 Configuration assembly instance X
10 Native language
DeviceNet Services Parameter Options
Serv ices Get_Attributes_All
Reset
None Supported X Get_Attribute_Single
Set_Attribute_Single
Restore
Save
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Parameter value X X =(0..4294967294)
2 Link Path size X
None Supported 3 Link path X
4 Descriptor X
5 Data type X
6 Data size X =(4)
7 Parameter name string
8 Units string
9 Help string
10 Minimum value
11 Maximum value
12 Default value
13 Scaling multiplier
14 Scaling div isor
15 Scaling base
16 Scaling offset
17 Multiplier link
18 Div isor link
19 Base link
20 Offset link
21 Decimal precision
DeviceNet Services Parameter Options
Serv ices Get_Attribute_All
None Supported X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form on page F-7. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 9 of 9
Pi
fkVA
Hz
n
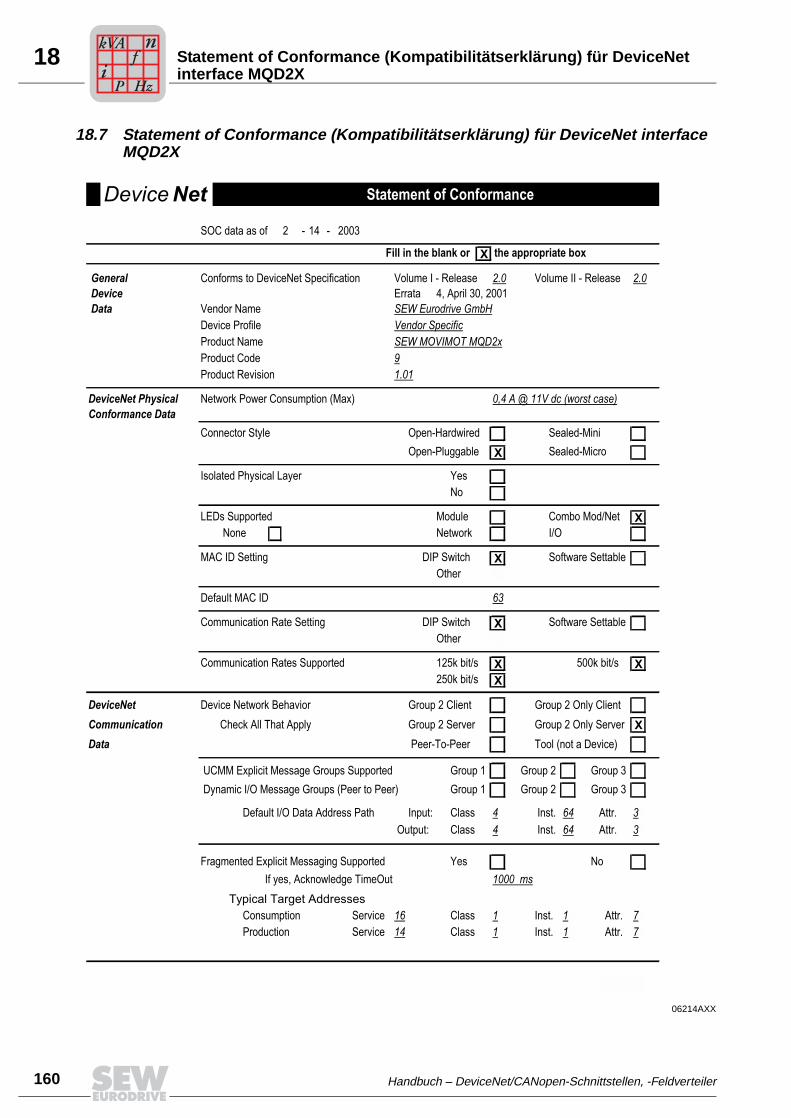
18
160 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
18.7 Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
06214AXX
Device Net Statement of Conformance
SOC data as of 2 - 14 - 2003
Fill in the blank or X the appropriate box
General Conforms to DeviceNet Specification Volume I - Release 2.0 Volume II - Release 2.0
Device Errata 4, April 30, 2001
Data Vendor Name SEW Eurodrive GmbH
Device Profile Vendor Specific
Product Name SEW MOVIMOT MQD2x
Product Code 9
Product Revision 1.01
DeviceNet Physical Network Power Consumption (Max) 0,4 A @ 11V dc (worst case)
Conformance Data
Connector Style Open-Hardwired Sealed-Mini
Open-Pluggable X Sealed-Micro
Isolated Physical Layer Yes
No
LEDs Supported Module Combo Mod/Net X
None Network I/O
MAC ID Setting DIP Switch X Software Settable
Other
Default MAC ID 63
Communication Rate Setting DIP Switch X Software Settable
Other
Communication Rates Supported 125k bit/s X 500k bit/s X
250k bit/s X
DeviceNet Device Network Behavior Group 2 Client Group 2 Only Client
Communication Check All That Apply Group 2 Server Group 2 Only Server X
Data Peer-To-Peer Tool (not a Device)
UCMM Explicit Message Groups Supported Group 1 Group 2 Group 3
Dynamic I/O Message Groups (Peer to Peer) Group 1 Group 2 Group 3
Default I/O Data Address Path Input: Class 4 Inst. 64 Attr. 3
Output: Class 4 Inst. 64 Attr. 3
Fragmented Explicit Messaging Supported Yes No
If yes, Acknowledge TimeOut 1000 ms
Typical Target Addresses
Consumption Service 16 Class 1 Inst. 1 Attr. 7
Production Service 14 Class 1 Inst. 1 Attr. 7
1 of 9
Pi
fkVA
Hz
n
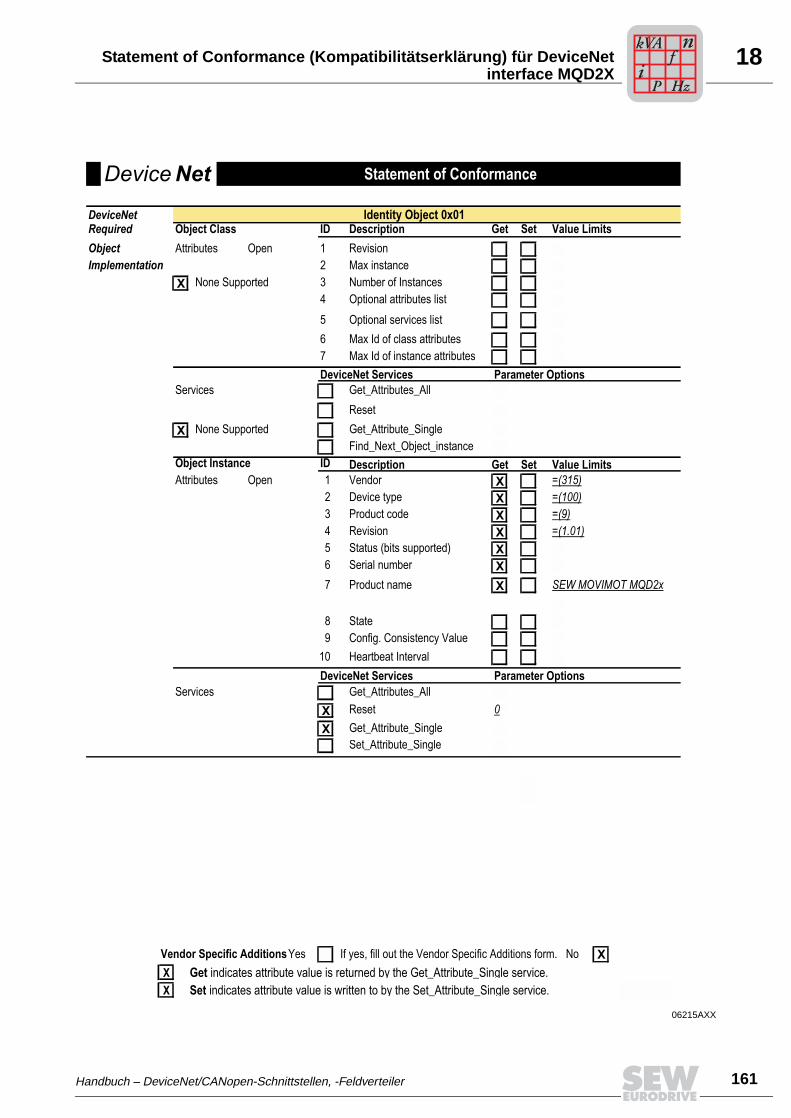
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 161
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD2X
06215AXX
Device Net Statement of Conformance
DeviceNet Identity Object 0x01Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attributes list
5 Optional services list
6 Max Id of class attributes
7 Max Id of instance attributes
DeviceNet Services Parameter Options
Services Get_Attributes_All
Reset
X None Supported Get_Attribute_Single
Find_Next_Object_instance
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Vendor X =(315)
2 Device type X =(100)
3 Product code X =(9)
4 Revision X =(1.01)
5 Status (bits supported) X
6 Serial number X
7 Product name X SEW MOVIMOT MQD2x
8 State
9 Config. Consistency Value
10 Heartbeat Interval
DeviceNet Services Parameter Options
Services Get_Attributes_All
X Reset 0
X Get_Attribute_Single
Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 2 of 9
Pi
fkVA
Hz
n
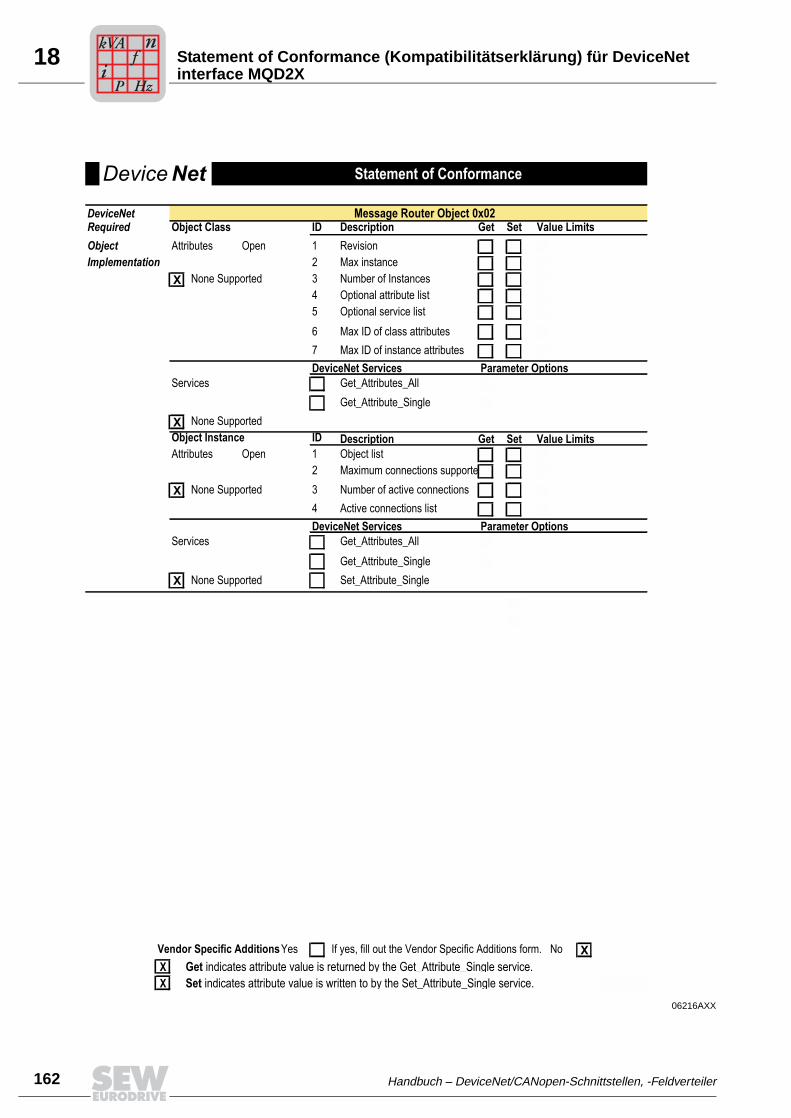
18
162 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
06216AXX
Device Net Statement of Conformance
DeviceNet Message Router Object 0x02Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Object list
2 Maximum connections supporte
X None Supported 3 Number of active connections
4 Active connections list
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 3 of 9
Pi
fkVA
Hz
n
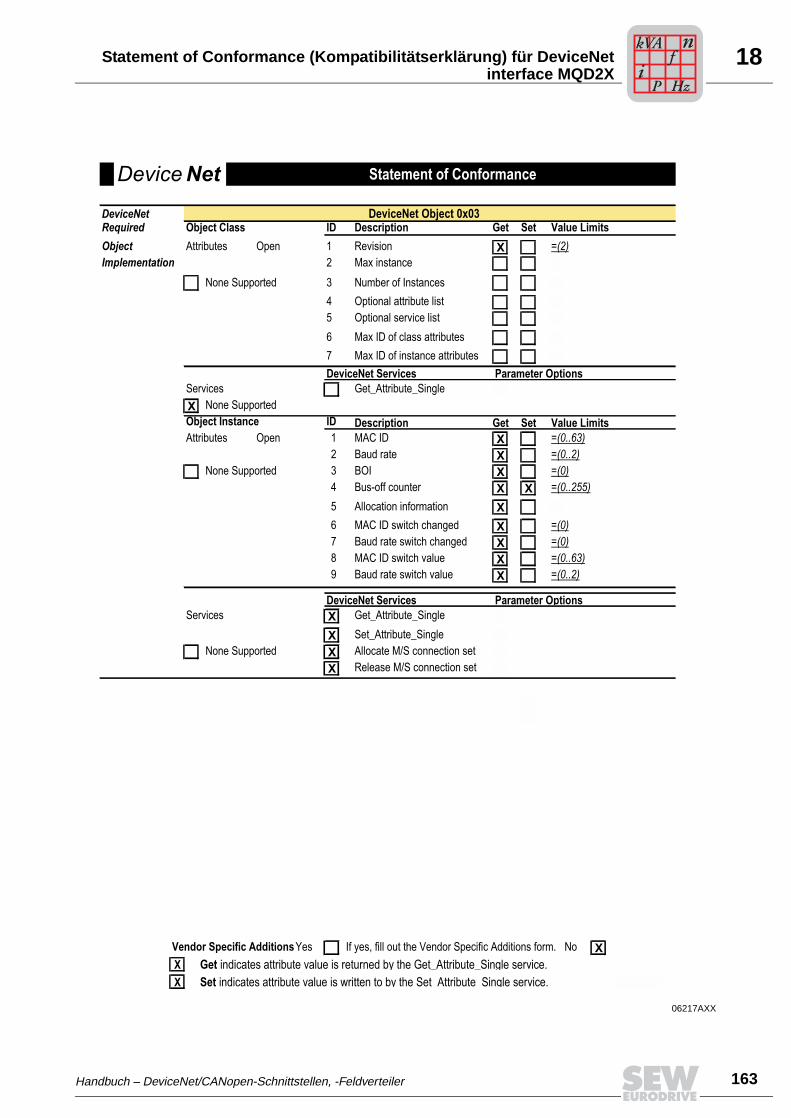
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 163
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD2X
06217AXX
Device Net Statement of Conformance
DeviceNet DeviceNet Object 0x03Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X =(2)
Implementation 2 Max instance
None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 MAC ID X =(0..63)
2 Baud rate X =(0..2)
None Supported 3 BOI X =(0)
4 Bus-off counter X X =(0..255)
5 Allocation information X
6 MAC ID switch changed X =(0)
7 Baud rate switch changed X =(0)
8 MAC ID switch value X =(0..63)
9 Baud rate switch value X =(0..2)
DeviceNet Services Parameter Options
Services X Get_Attribute_Single
X Set_Attribute_Single
None Supported X Allocate M/S connection set
X Release M/S connection set
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 4 of 9
Pi
fkVA
Hz
n
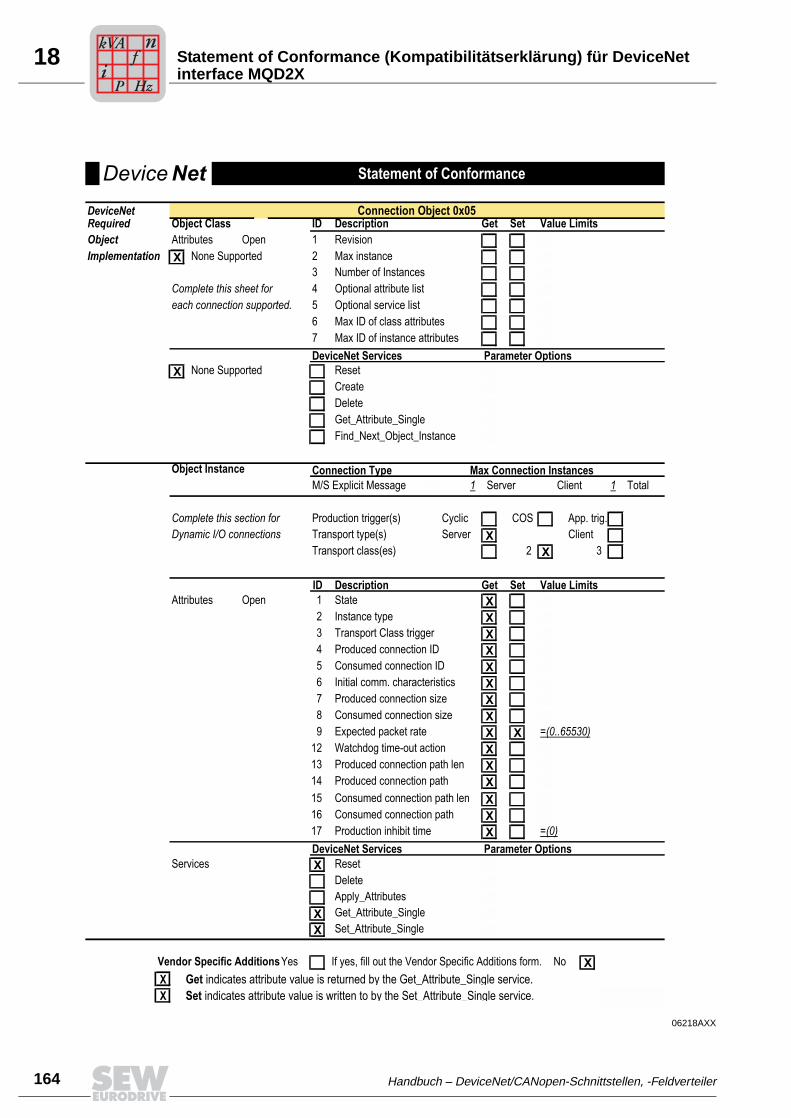
18
164 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
06218AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Explicit Message 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 5 of 9
Pi
fkVA
Hz
n
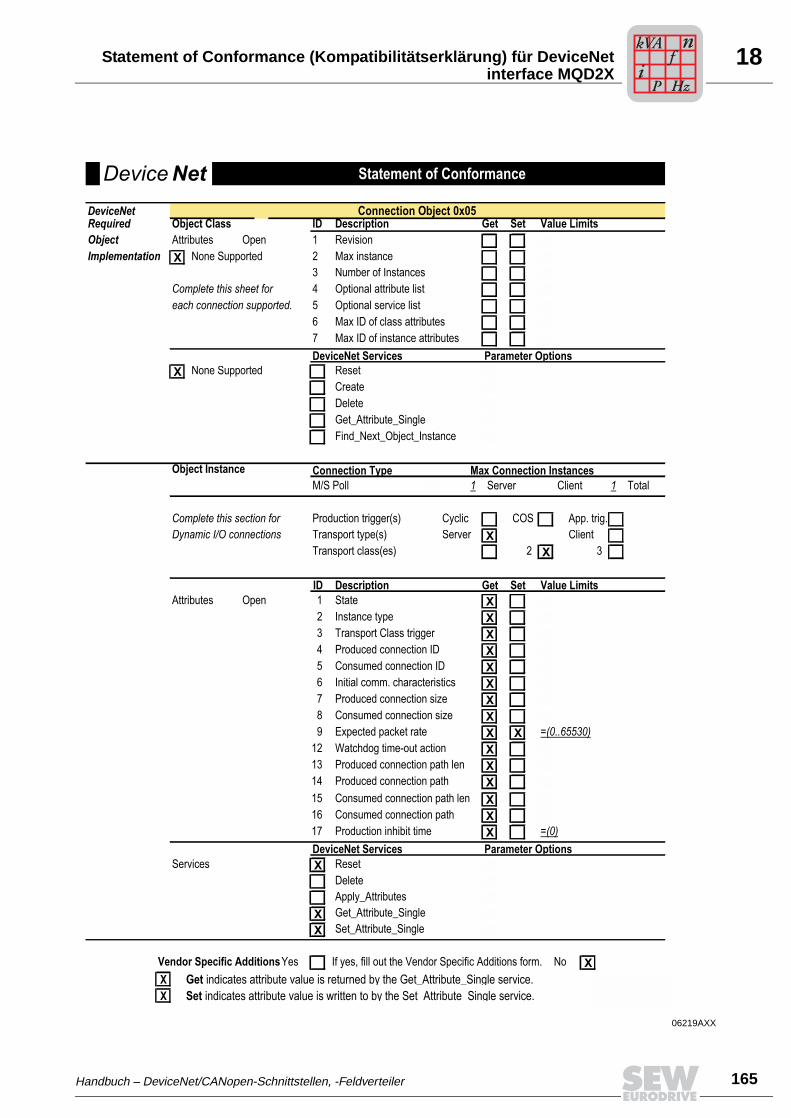
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 165
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD2X
06219AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Poll 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 6 of 9
Pi
fkVA
Hz
n
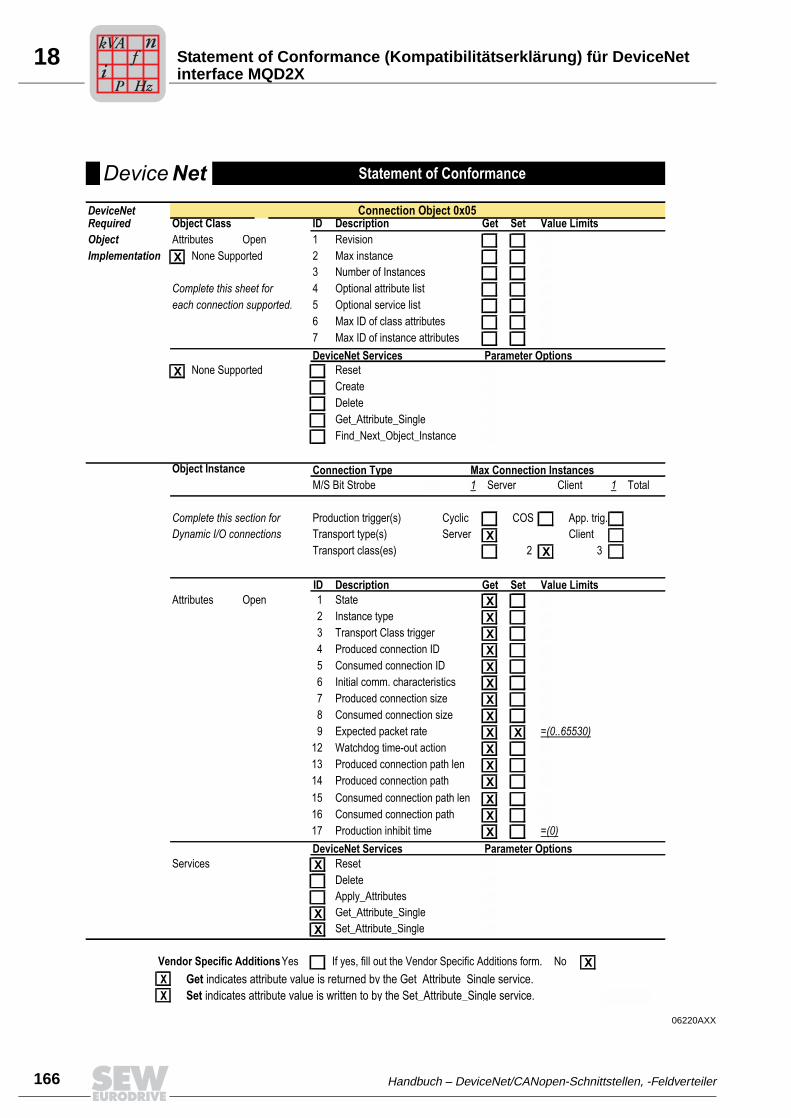
18
166 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
06220AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Bit Strobe 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 7 of 9
Pi
fkVA
Hz
n
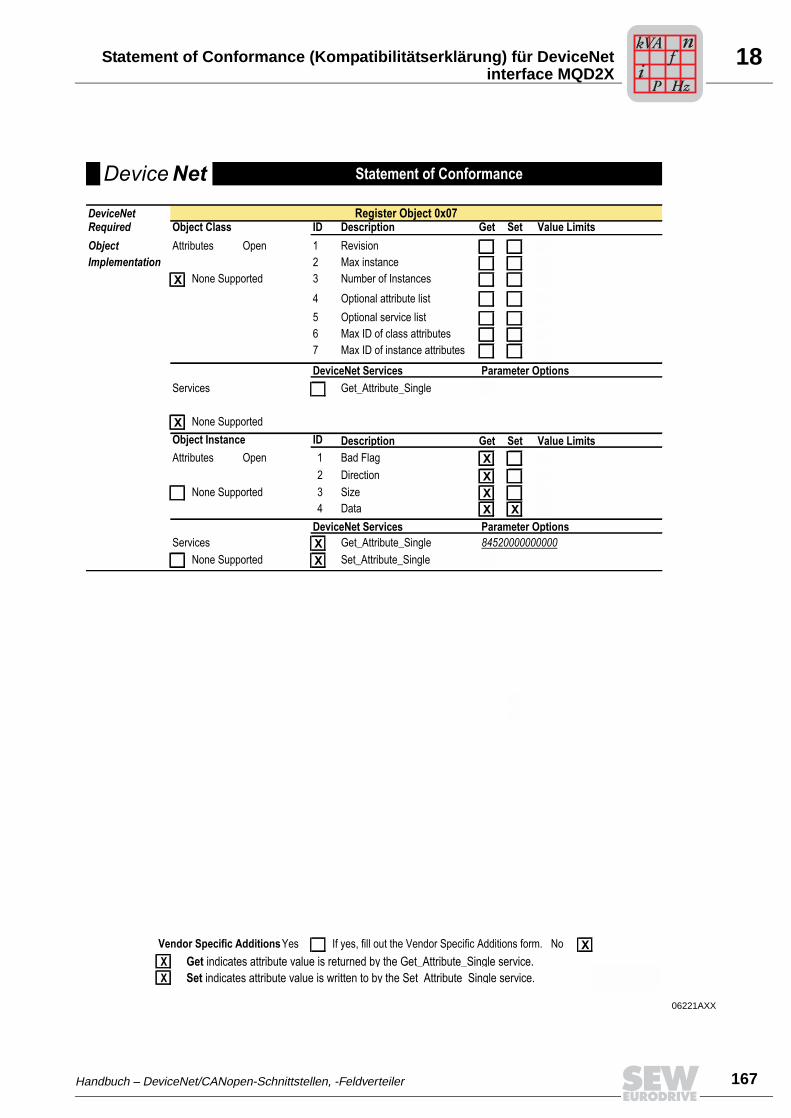
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 167
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD2X
06221AXX
Device Net Statement of Conformance
DeviceNet Register Object 0x07Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Bad Flag X
2 Direction X
None Supported 3 Size X
4 Data X X
DeviceNet Services Parameter Options
Services X Get_Attribute_Single 84520000000000
None Supported X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 8 of 9
Pi
fkVA
Hz
n
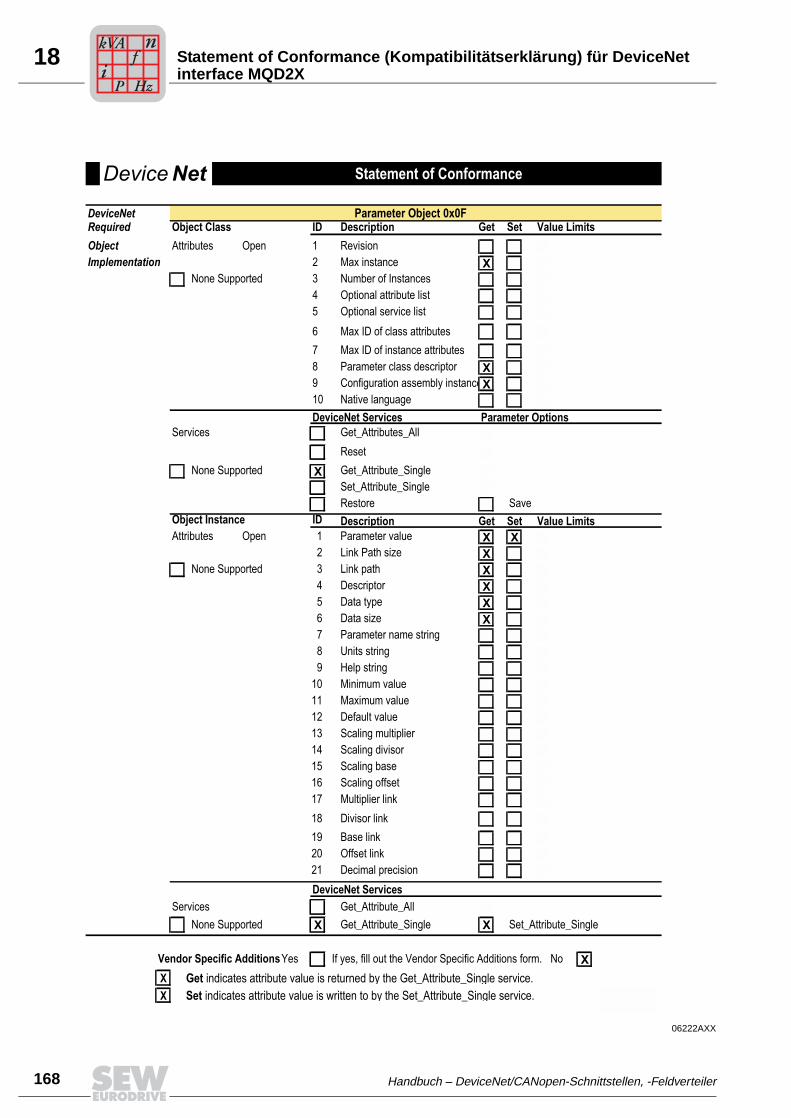
18
168 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD2X
06222AXX
Device Net Statement of Conformance
DeviceNet Parameter Object 0x0FRequired Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance X
None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
8 Parameter class descriptor X
9 Configuration assembly instanceX
10 Native language
DeviceNet Services Parameter Options
Services Get_Attributes_All
Reset
None Supported X Get_Attribute_Single
Set_Attribute_Single
Restore Save
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Parameter value X X
2 Link Path size X
None Supported 3 Link path X
4 Descriptor X
5 Data type X
6 Data size X
7 Parameter name string
8 Units string
9 Help string
10 Minimum value
11 Maximum value
12 Default value
13 Scaling multiplier
14 Scaling divisor
15 Scaling base
16 Scaling offset
17 Multiplier link
18 Divisor link
19 Base link
20 Offset link
21 Decimal precision
DeviceNet Services
Services Get_Attribute_All
None Supported X Get_Attribute_Single X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 9 of 9
Pi
fkVA
Hz
n
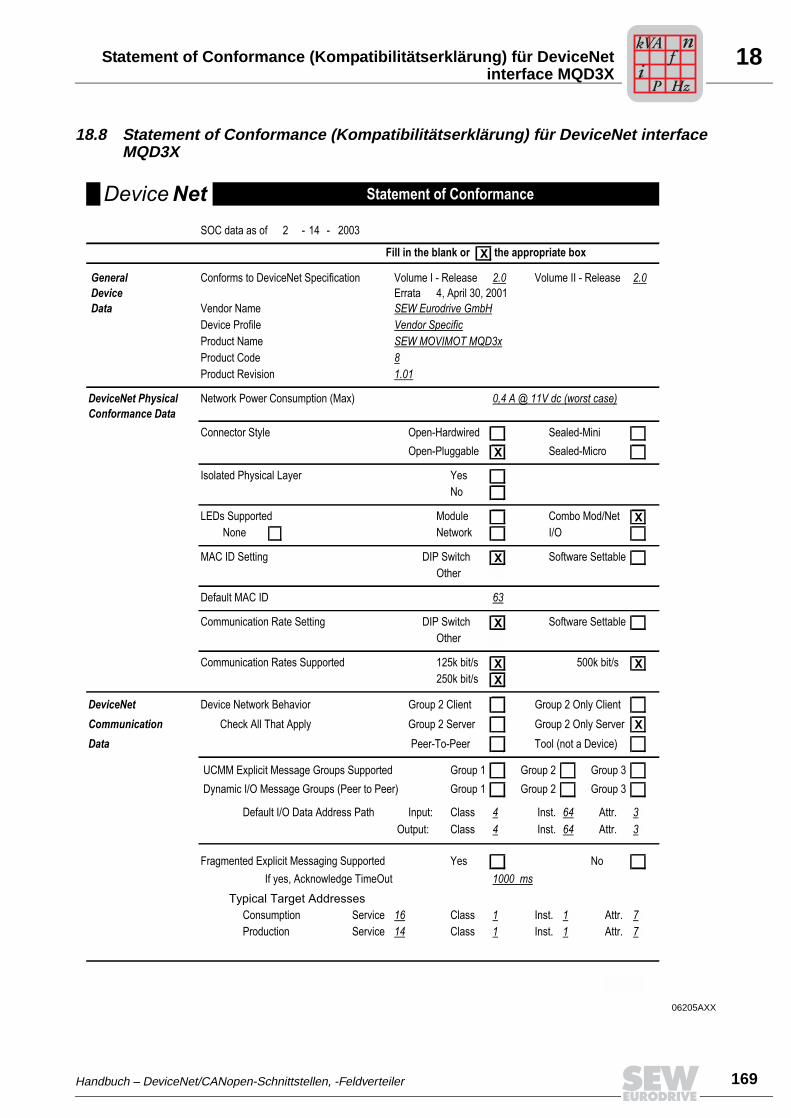
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 169
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD3X
18.8 Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD3X
06205AXX
Device Net Statement of Conformance
SOC data as of 2 - 14 - 2003
Fill in the blank or X the appropriate box
General Conforms to DeviceNet Specification Volume I - Release 2.0 Volume II - Release 2.0
Device Errata 4, April 30, 2001
Data Vendor Name SEW Eurodrive GmbH
Device Profile Vendor Specific
Product Name SEW MOVIMOT MQD3x
Product Code 8
Product Revision 1.01
DeviceNet Physical Network Power Consumption (Max) 0,4 A @ 11V dc (worst case)
Conformance Data
Connector Style Open-Hardwired Sealed-Mini
Open-Pluggable X Sealed-Micro
Isolated Physical Layer Yes
No
LEDs Supported Module Combo Mod/Net X
None Network I/O
MAC ID Setting DIP Switch X Software Settable
Other
Default MAC ID 63
Communication Rate Setting DIP Switch X Software Settable
Other
Communication Rates Supported 125k bit/s X 500k bit/s X
250k bit/s X
DeviceNet Device Network Behavior Group 2 Client Group 2 Only Client
Communication Check All That Apply Group 2 Server Group 2 Only Server X
Data Peer-To-Peer Tool (not a Device)
UCMM Explicit Message Groups Supported Group 1 Group 2 Group 3
Dynamic I/O Message Groups (Peer to Peer) Group 1 Group 2 Group 3
Default I/O Data Address Path Input: Class 4 Inst. 64 Attr. 3
Output: Class 4 Inst. 64 Attr. 3
Fragmented Explicit Messaging Supported Yes No
If yes, Acknowledge TimeOut 1000 ms
Typical Target Addresses
Consumption Service 16 Class 1 Inst. 1 Attr. 7
Production Service 14 Class 1 Inst. 1 Attr. 7
1 of 9
Pi
fkVA
Hz
n
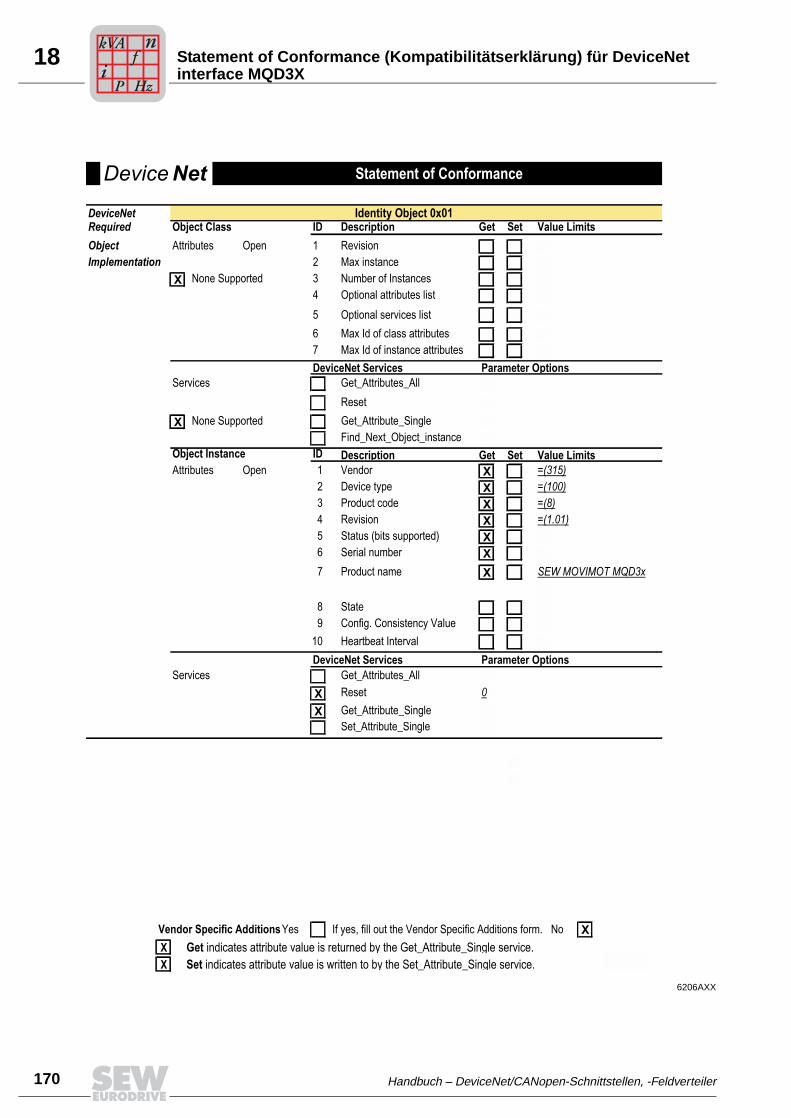
18
170 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD3X
6206AXX
Device Net Statement of Conformance
DeviceNet Identity Object 0x01Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attributes list
5 Optional services list
6 Max Id of class attributes
7 Max Id of instance attributes
DeviceNet Services Parameter Options
Services Get_Attributes_All
Reset
X None Supported Get_Attribute_Single
Find_Next_Object_instance
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Vendor X =(315)
2 Device type X =(100)
3 Product code X =(8)
4 Revision X =(1.01)
5 Status (bits supported) X
6 Serial number X
7 Product name X SEW MOVIMOT MQD3x
8 State
9 Config. Consistency Value
10 Heartbeat Interval
DeviceNet Services Parameter Options
Services Get_Attributes_All
X Reset 0
X Get_Attribute_Single
Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 2 of 9
Pi
fkVA
Hz
n
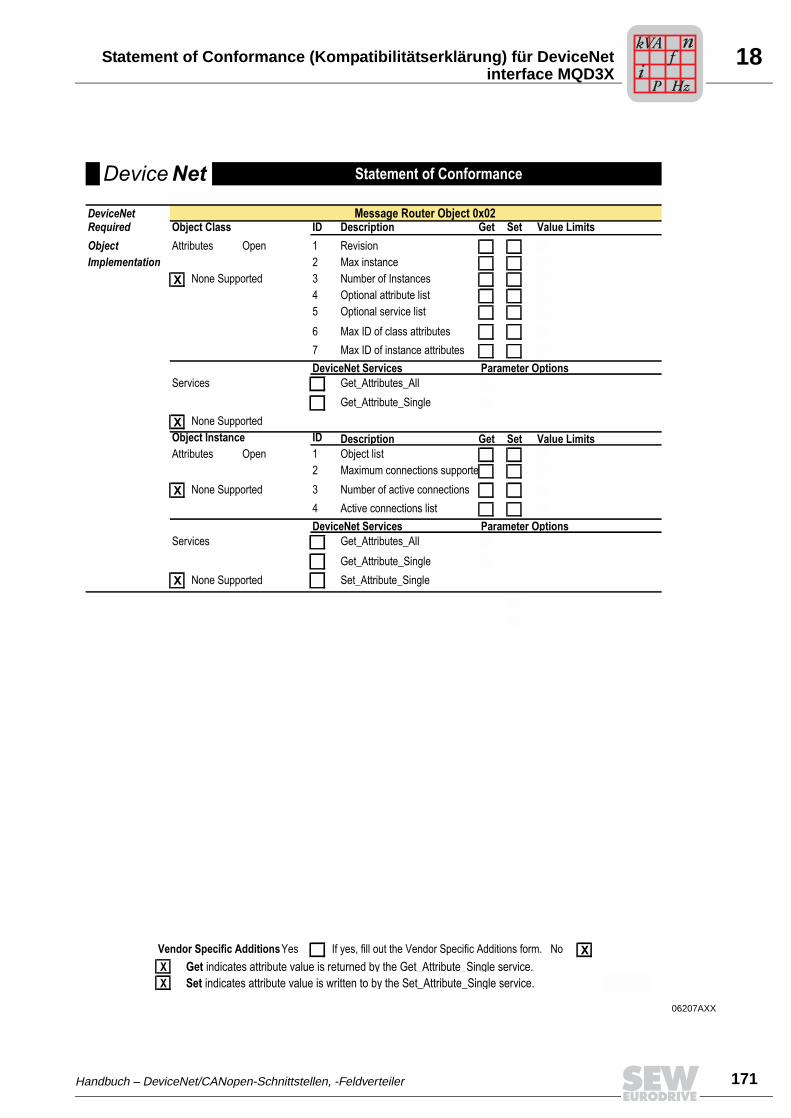
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 171
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD3X
06207AXX
Device Net Statement of Conformance
DeviceNet Message Router Object 0x02Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Object list
2 Maximum connections supporte
X None Supported 3 Number of active connections
4 Active connections list
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 3 of 9
Pi
fkVA
Hz
n
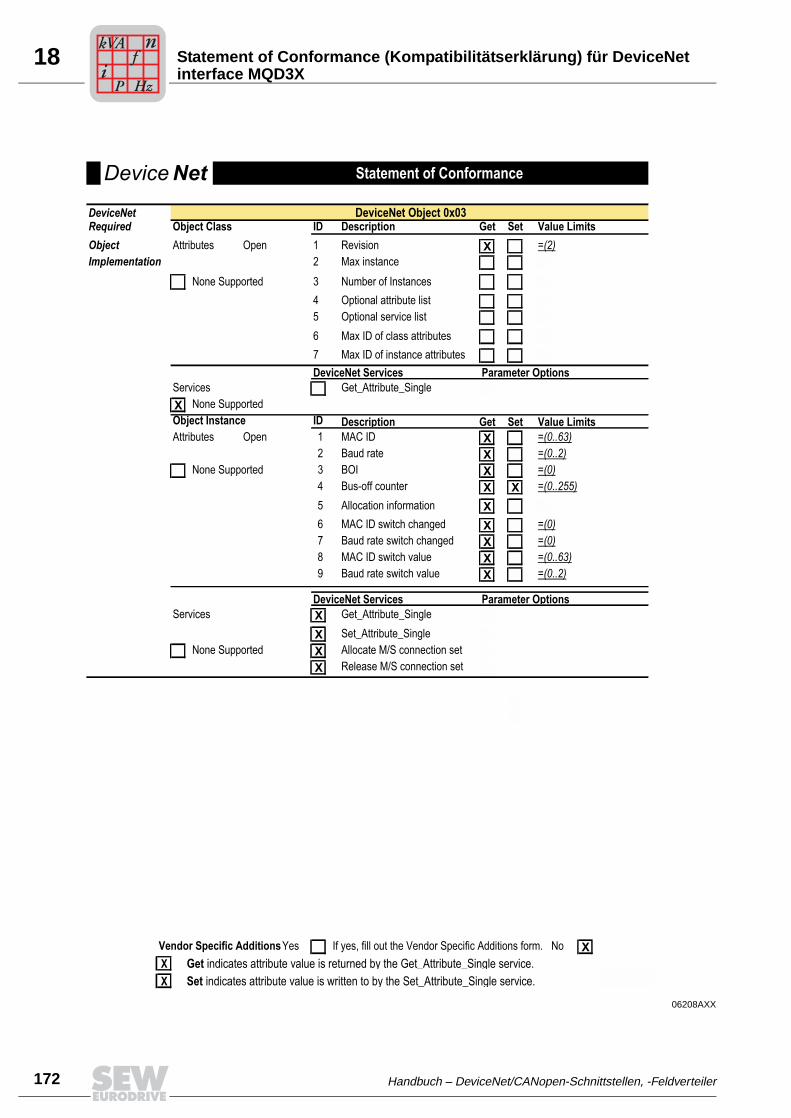
18
172 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD3X
06208AXX
Device Net Statement of Conformance
DeviceNet DeviceNet Object 0x03Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X =(2)
Implementation 2 Max instance
None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 MAC ID X =(0..63)
2 Baud rate X =(0..2)
None Supported 3 BOI X =(0)
4 Bus-off counter X X =(0..255)
5 Allocation information X
6 MAC ID switch changed X =(0)
7 Baud rate switch changed X =(0)
8 MAC ID switch value X =(0..63)
9 Baud rate switch value X =(0..2)
DeviceNet Services Parameter Options
Services X Get_Attribute_Single
X Set_Attribute_Single
None Supported X Allocate M/S connection set
X Release M/S connection set
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 4 of 9
Pi
fkVA
Hz
n
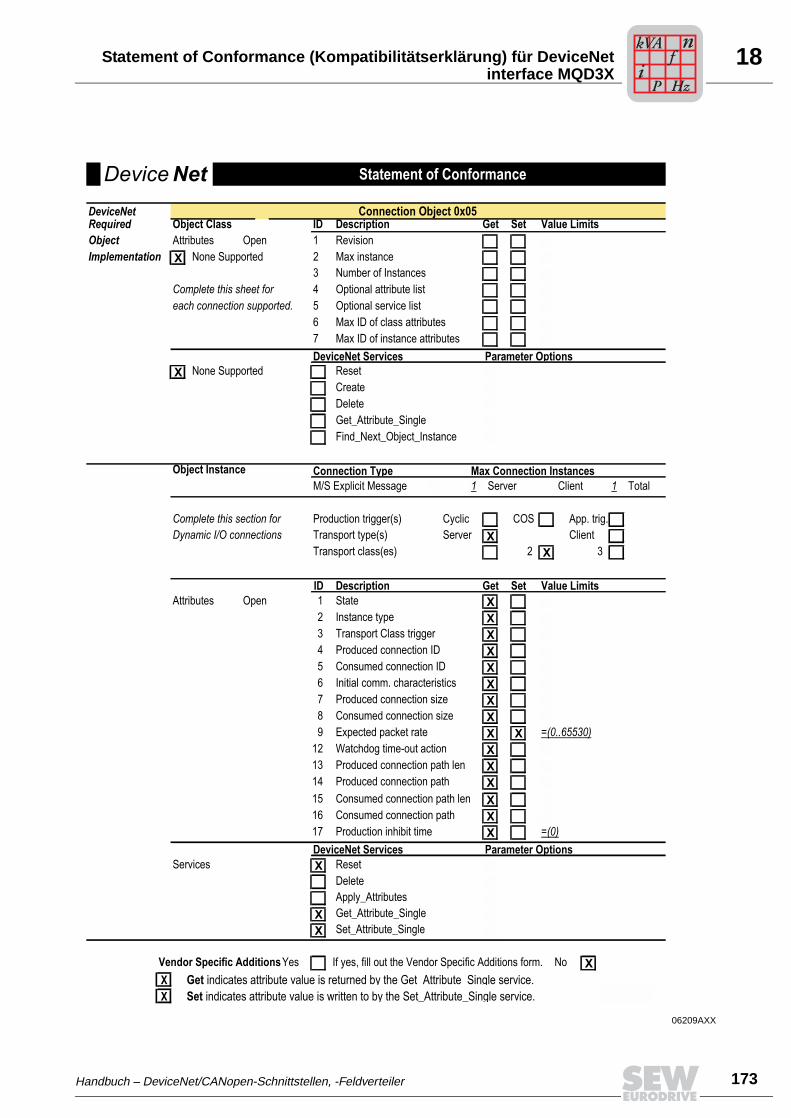
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 173
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD3X
06209AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Explicit Message 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 5 of 9
Pi
fkVA
Hz
n
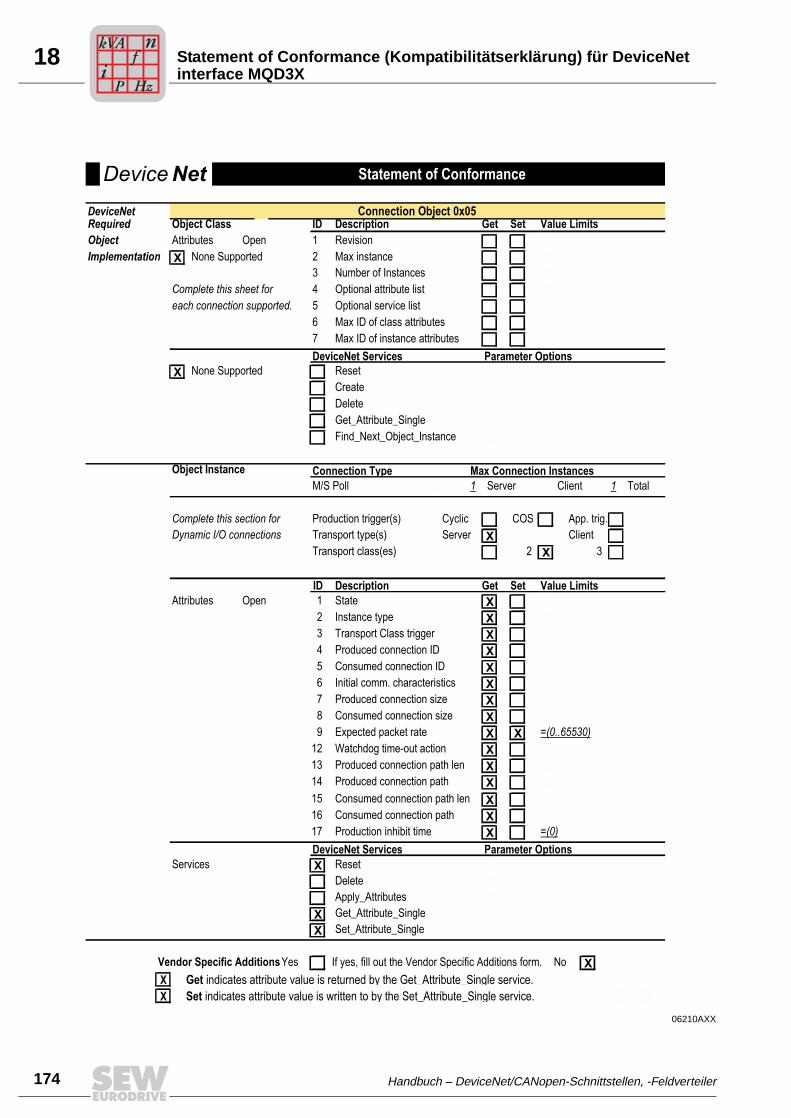
18
174 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD3X
06210AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Poll 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 6 of 9
Pi
fkVA
Hz
n
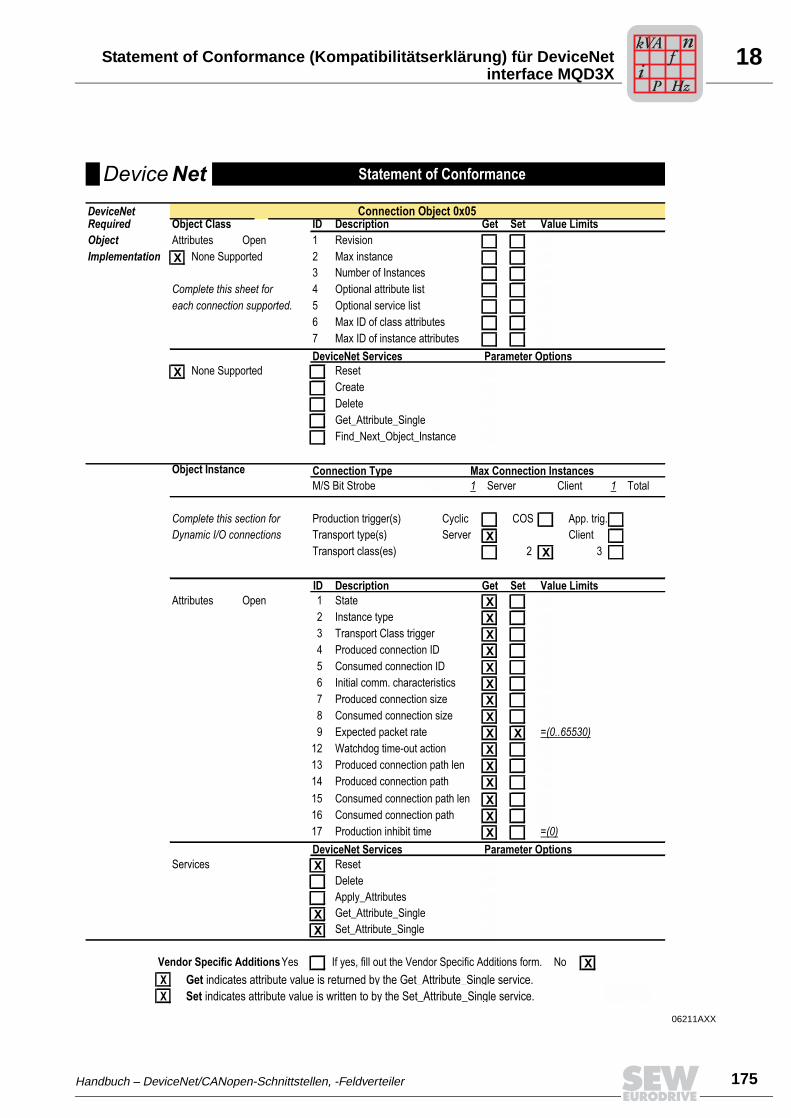
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 175
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD3X
06211AXX
Device Net Statement of Conformance
DeviceNet Connection Object 0x05Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation X None Supported 2 Max instance
3 Number of Instances
Complete this sheet for 4 Optional attribute list
each connection supported. 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
X None Supported Reset
Create
Delete
Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Connection Type Max Connection Instances
M/S Bit Strobe 1 Server Client 1 Total
Complete this section for Production trigger(s) Cyclic COS App. trig.
Dynamic I/O connections Transport type(s) Server X Client
Transport class(es) 2 X 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X =(0..65530)
12 Watchdog time-out action X
13 Produced connection path len X
14 Produced connection path X
15 Consumed connection path len X
16 Consumed connection path X
17 Production inhibit time X =(0)
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 7 of 9
Pi
fkVA
Hz
n
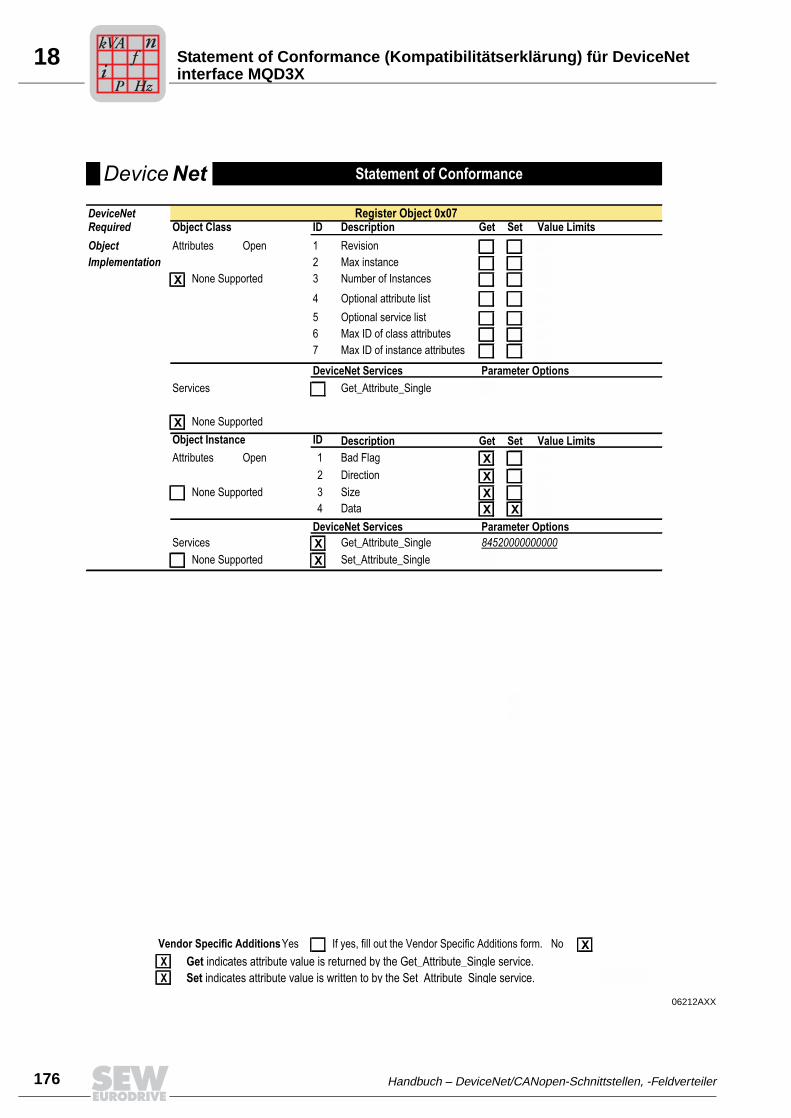
18
176 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Statement of Conformance (Kompatibilitätserklärung) für DeviceNet interface MQD3X
06212AXX
Device Net Statement of Conformance
DeviceNet Register Object 0x07Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance
X None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Bad Flag X
2 Direction X
None Supported 3 Size X
4 Data X X
DeviceNet Services Parameter Options
Services X Get_Attribute_Single 84520000000000
None Supported X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 8 of 9
Pi
fkVA
Hz
n
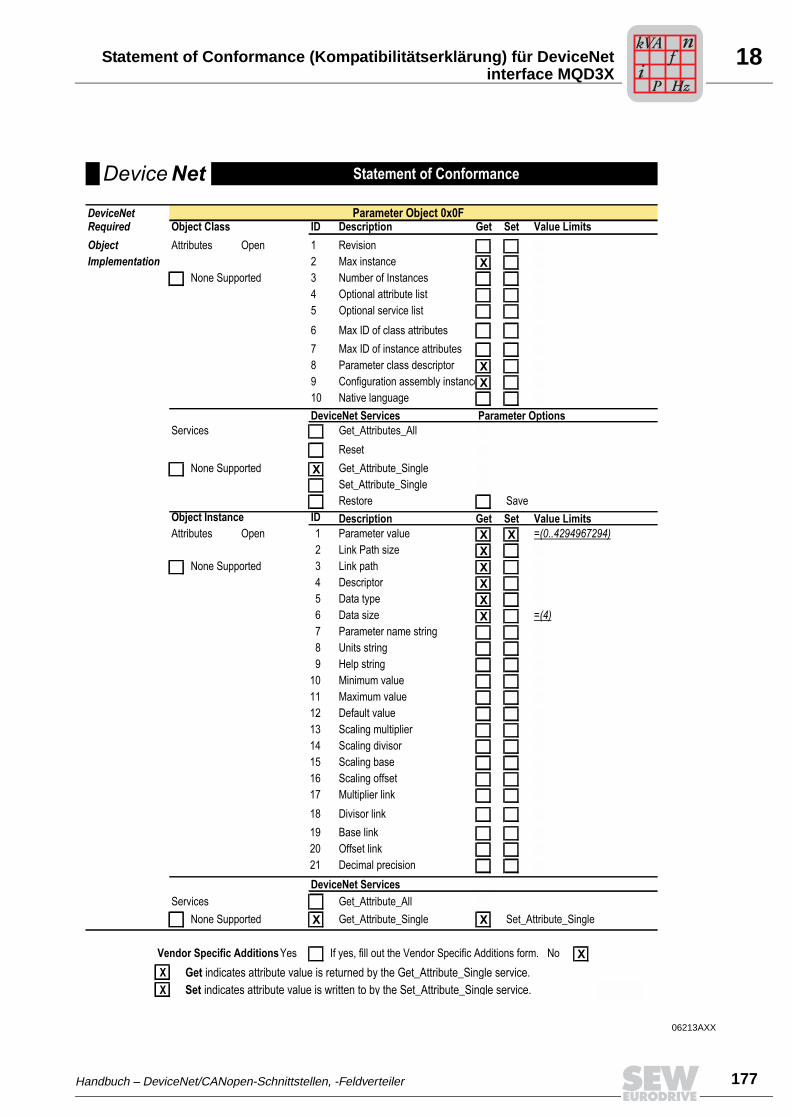
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 177
18Statement of Conformance (Kompatibilitätserklärung) für DeviceNetinterface MQD3X
06213AXX
Device Net Statement of Conformance
DeviceNet Parameter Object 0x0FRequired Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 2 Max instance X
None Supported 3 Number of Instances
4 Optional attribute list
5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
8 Parameter class descriptor X
9 Configuration assembly instanceX
10 Native language
DeviceNet Services Parameter Options
Services Get_Attributes_All
Reset
None Supported X Get_Attribute_Single
Set_Attribute_Single
Restore Save
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Parameter value X X =(0..4294967294)
2 Link Path size X
None Supported 3 Link path X
4 Descriptor X
5 Data type X
6 Data size X =(4)
7 Parameter name string
8 Units string
9 Help string
10 Minimum value
11 Maximum value
12 Default value
13 Scaling multiplier
14 Scaling divisor
15 Scaling base
16 Scaling offset
17 Multiplier link
18 Divisor link
19 Base link
20 Offset link
21 Decimal precision
DeviceNet Services
Services Get_Attribute_All
None Supported X Get_Attribute_Single X Set_Attribute_Single
Vendor Specific AdditionsYes If yes, fill out the Vendor Specific Additions form. No X
X Get indicates attribute value is returned by the Get_Attribute_Single service.
X Set indicates attribute value is written to by the Set_Attribute_Single service. 9 of 9
Pi
fkVA
Hz
n
178 Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler
Index
AAdresse 62, 96
Anschlussquerschnitt 34
Aufstellen in Feuchträumen oder im Freien 22
Aufstellhöhen 36
BBaudrate 62, 97
Bediengerät MFG11A 114
Bestimmungsgemäße Verwendung 6Bit-Strobe I/O 70, 83
Broadcast-Prozessdatenverarbeitung 70
Busdiagnose 127
Busmonitor 132
CC-Profil-Schiene 29
DDefault-Programm 80
Device Parameter 85
DeviceNet Timeout 78
Diagnose 79
Diagnoseschnittstelle MF../MQ.. 127
DIP-Schalter 72, 101
EEin-/Ausgangsbyte 69, 100
Einsatzumgebung 7Emergency-Objekt 106
EMV 32, 37
Explicit Messages 87
FFehlerreaktionen 80
Fehlertabelle 135
Fehlerzustände 78, 105
Feldbusmonitor 132
GGeräteaufbau Feldbus-Schnittstellen 10
Geräteaufbau Feldverteiler 13
II/O-Enable 63, 97
Idle-Mode 82
Installationsvorschriften 22
KKodierung der Prozessdaten 116
Konfektionierte Kabel 59
Konfiguration (Projektierung) Masters 65, 98
LLED-Anzeige 73, 89
MMAC-ID 87
Metall-Kabelverschraubungen 37
MFG11A 115
Mitgeltende Unterlagen 6Montage Feldbus-Schnittstellen 23
Montage von Feldverteilern 26
MOVILINK®-Geräteprofil 116
MOVIMOT®-Zusatzfunktionen 113
NNetzzuleitungen anschließen 34
PParameter 125
Parameter-Channel 84
PD-Konfiguration 72
PI-Monitor 86
Polled I/O 82
PO-Monitor 86
Programmbeispiel DeviceNet 121
Programmbeispiel Simatic S7 und Feldbus 119
Prozess-Ausgangsdaten 117
Prozessdaten- und Sensor-/Aktor-Verarbeitung 69
Prozessdatenaustausch 106
Prozessdaten-Konfiguration 82
Prozessdatenlänge 63, 97
Prozess-Eingangsdaten 118
RRückkehr-Codes 88
SSchutzeinrichtungen 36
Sicherheitshinweise 8Status-LED 134
Strombelastbarkeit 34
Systemfehler 78, 105
TTechnische Daten CANopen 138
Technische Daten DeviceNet 136, 137
Technische Daten Feldverteiler MF../MM../Z.7., MQ../MM../Z.7. 140
Technische Daten Feldverteiler MF../MM../Z.8., MQ../MM../Z.8. 141
Technische Daten Feldverteiler MF../Z.3., MQ../Z.3. 139
Technische Daten Feldverteiler MF../Z.6., MQ../Z.6. 139
Timeout 94, 105
Handbuch – DeviceNet/CANopen-Schnittstellen, -Feldverteiler 179
UUL-gerechte Installation 36
VVerdrahtungsprüfung 38
Versorgungsspannung 34
WWartungs-Schalter 108, 110
Wichtige Hinweise 6
07/2003
Adressenverzeichnis
AdressenverzeichnisDeutschland
HauptverwaltungFertigungswerkVertriebService
Bruchsal SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 BruchsalPostfachadressePostfach 3023 · D-76642 Bruchsal
Tel. +49 7251 75-0Fax +49 7251 75-1970http://[email protected] Elektronik:Tel. +49 171 7210791Service Getriebe und Motoren:Tel. +49 172 7601377
MontagewerkeService
Garbsen (bei Hannover)
SEW-EURODRIVE GmbH & Co KGAlte Ricklinger Straße 40-42 D-30823 GarbsenPostfachadressePostfach 110453 · D-30804 Garbsen
Tel. +49 5137 8798-30Fax +49 5137 [email protected]
Kirchheim (bei München)
SEW-EURODRIVE GmbH & Co KGDomagkstraße 5D-85551 Kirchheim
Tel. +49 89 909552-10Fax +49 89 [email protected]
Langenfeld (bei Düsseldorf)
SEW-EURODRIVE GmbH & Co KGSiemensstraße 1D-40764 Langenfeld
Tel. +49 2173 8507-30Fax +49 2173 [email protected]
Meerane(bei Zwickau)
SEW-EURODRIVE GmbH & Co KGDänkritzer Weg 1D-08393 Meerane
Tel. +49 3764 7606-0Fax +49 3764 [email protected]
Weitere Anschriften über Service-Stationen in Deutschland auf Anfrage.
Frankreich
FertigungswerkVertriebService
Haguenau SEW-USOCOME 48-54, route de Soufflenheim B. P. 185F-67506 Haguenau Cedex
Tel. +33 3 88 73 67 00 Fax +33 3 88 73 66 00http://[email protected]
MontagewerkeVertriebService
Bordeaux SEW-USOCOME Parc d’activités de Magellan62, avenue de Magellan - B. P. 182F-33607 Pessac Cedex
Tel. +33 5 57 26 39 00Fax +33 5 57 26 39 09
Lyon SEW-USOCOME Parc d’Affaires RooseveltRue Jacques TatiF-69120 Vaulx en Velin
Tel. +33 4 72 15 37 00Fax +33 4 72 15 37 15
Paris SEW-USOCOME Zone industrielle 2, rue Denis Papin F-77390 Verneuil I’Etang
Tel. +33 1 64 42 40 80Fax +33 1 64 42 40 88
Weitere Anschriften über Service-Stationen in Frankreich auf Anfrage.
Algerien
Vertrieb Alger Réducom 16, rue des Frères ZaghnounBellevue El-Harrach16200 Alger
Tel. +213 21 8222-84Fax +213 21 8222-84
Argentinien
MontagewerkVertriebService
Buenos Aires SEW EURODRIVE ARGENTINA S.A.Centro Industrial Garin, Lote 35Ruta Panamericana Km 37,51619 Garin
Tel. +54 3327 4572-84Fax +54 3327 [email protected]
Australien
MontagewerkeVertriebService
Melbourne SEW-EURODRIVE PTY. LTD.27 Beverage DriveTullamarine, Victoria 3043
Tel. +61 3 9933-1000Fax +61 3 9933-1003http://[email protected]
Sydney SEW-EURODRIVE PTY. LTD.9, Sleigh Place, Wetherill Park New South Wales, 2164
Tel. +61 2 9725-9900Fax +61 2 [email protected]
07/2003
Adressenverzeichnis
Belgien
MontagewerkVertriebService
Brüssel CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
Brasilien
FertigungswerkVertriebService
Sao Paulo SEW-EURODRIVE Brasil Ltda.Avenida Amâncio Gaiolli, 50Caixa Postal: 201-07111-970Guarulhos/SP - Cep.: 07251-250
Tel. +55 11 6489-9133Fax +55 11 6480-3328http://[email protected]
Weitere Anschriften über Service-Stationen in Brasilien auf Anfrage.
Bulgarien
Vertrieb Sofia BEVER-DRIVE GMBHBogdanovetz Str.1BG-1606 Sofia
Tel. +359 (2) 9532565Fax +359 (2) [email protected]
Chile
MontagewerkVertriebService
Santiago de Chile
SEW-EURODRIVE CHILE LTDA.Las Encinas 1295Parque Industrial Valle GrandeLAMPARCH-Santiago de ChilePostfachadresseCasilla 23 Correo Quilicura - Santiago - Chile
Tel. +56 2 75770-00Fax +56 2 [email protected]
China
FertigungswerkMontagewerkVertriebService
Tianjin SEW-EURODRIVE (Tianjin) Co., Ltd.No. 46, 7th Avenue, TEDA Tianjin 300457
Tel. +86 22 25322612Fax +86 22 25322611http://www.sew.com.cn
MontagewerkVertriebService
Suzhou SEW-EURODRIVE (Suzhou) Co., Ltd.333, Suhong Middle RoadSuzhou Industrial ParkJiangsu Province, 215021P. R. China
Tel. +86 512 62581781Fax +86 512 [email protected]
Dänemark
MontagewerkVertriebService
Kopenhagen SEW-EURODRIVEA/SGeminivej 28-30, P.O. Box 100DK-2670 Greve
Tel. +45 43 9585-00Fax +45 43 9585-09http://[email protected]
Elfenbeinküste
Vertrieb Abidjan SICASte industrielle et commerciale pour l’Afrique165, Bld de MarseilleB.P. 2323, Abidjan 08
Tel. +225 2579-44Fax +225 2584-36
Estland
Vertrieb Tallin ALAS-KUUL ASPaldiski mnt.125EE 0006 Tallin
Tel. +372 6593230Fax +372 6593231
Finnland
MontagewerkVertriebService
Lahti SEW-EURODRIVE OYVesimäentie 4FIN-15860 Hollola 2
Tel. +358 3 589-300Fax +358 3 7806-211http://[email protected]
Gabun
Vertrieb Libreville Electro-ServicesB.P. 1889Libreville
Tel. +241 7340-11Fax +241 7340-12
07/2003
Adressenverzeichnis
Griechenland
VertriebService
Athen Christ. Boznos & Son S.A.12, Mavromichali StreetP.O. Box 80136, GR-18545 Piraeus
Tel. +30 2 1042 251-34 Fax +30 2 1042 251-59http://[email protected]
Großbritannien
MontagewerkVertriebService
Normanton SEW-EURODRIVE Ltd.Beckbridge Industrial Estate P.O. Box No.1GB-Normanton, West- Yorkshire WF6 1QR
Tel. +44 1924 893-855Fax +44 1924 893-702http://[email protected]
Hong Kong
MontagewerkVertriebService
Hong Kong SEW-EURODRIVE LTD.Unit No. 801-806, 8th FloorHong Leong Industrial ComplexNo. 4, Wang Kwong Road Kowloon, Hong Kong
Tel. +852 2 7960477 + 79604654Fax +852 2 [email protected]
Indien
MontagewerkVertriebService
Baroda SEW-EURODRIVE India Pvt. Ltd.Plot No. 4, GidcPor Ramangamdi · Baroda - 391 243Gujarat
Tel. +91 265 2831021Fax +91 265 [email protected]
Technische Büros Bangalore SEW-EURODRIVE India Private Limited308, Prestige Centre Point7, Edward RoadBangalore
Tel. +91 80 22266565Fax +91 80 [email protected]
Mumbai SEW-EURODRIVE India Private Limited312 A, 3rd Floor, Acme PlazaAndheri Kurla Road, Andheri (E)Mumbai
Tel. +91 22 28348440Fax +91 22 [email protected]
Irland
VertriebService
Dublin Alperton Engineering Ltd. 48 Moyle RoadDublin Industrial EstateGlasnevin, Dublin 11
Tel. +353 1 830-6277Fax +353 1 830-6458
Italien
MontagewerkVertriebService
Milano SEW-EURODRIVE di R. Blickle & Co.s.a.s.Via Bernini,14 I-20020 Solaro (Milano)
Tel. +39 2 96 9801Fax +39 2 96 [email protected]
Japan
MontagewerkVertriebService
Toyoda-cho SEW-EURODRIVE JAPAN CO., LTD 250-1, Shimoman-no,Toyoda-cho, Iwata gunShizuoka prefecture, 438-0818
Tel. +81 538 373811Fax +81 538 [email protected]
Kamerun
Vertrieb Douala Electro-ServicesRue Drouot AkwaB.P. 2024Douala
Tel. +237 4322-99Fax +237 4277-03
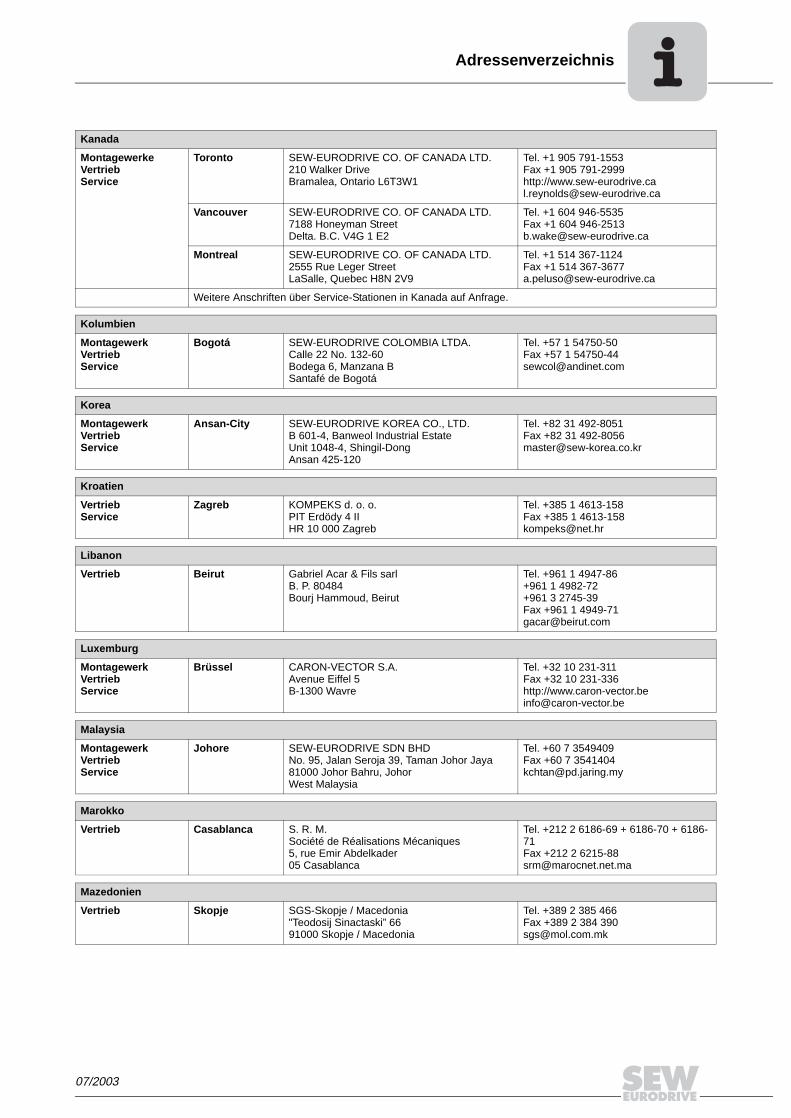
07/2003
Adressenverzeichnis
Kanada
MontagewerkeVertriebService
Toronto SEW-EURODRIVE CO. OF CANADA LTD. 210 Walker Drive Bramalea, Ontario L6T3W1
Tel. +1 905 791-1553Fax +1 905 791-2999http://[email protected]
Vancouver SEW-EURODRIVE CO. OF CANADA LTD.7188 Honeyman Street Delta. B.C. V4G 1 E2
Tel. +1 604 946-5535Fax +1 604 [email protected]
Montreal SEW-EURODRIVE CO. OF CANADA LTD.2555 Rue Leger Street LaSalle, Quebec H8N 2V9
Tel. +1 514 367-1124Fax +1 514 [email protected]
Weitere Anschriften über Service-Stationen in Kanada auf Anfrage.
Kolumbien
MontagewerkVertriebService
Bogotá SEW-EURODRIVE COLOMBIA LTDA. Calle 22 No. 132-60Bodega 6, Manzana BSantafé de Bogotá
Tel. +57 1 54750-50Fax +57 1 [email protected]
Korea
MontagewerkVertriebService
Ansan-City SEW-EURODRIVE KOREA CO., LTD. B 601-4, Banweol Industrial Estate Unit 1048-4, Shingil-DongAnsan 425-120
Tel. +82 31 492-8051Fax +82 31 [email protected]
Kroatien
VertriebService
Zagreb KOMPEKS d. o. o.PIT Erdödy 4 IIHR 10 000 Zagreb
Tel. +385 1 4613-158Fax +385 1 [email protected]
Libanon
Vertrieb Beirut Gabriel Acar & Fils sarlB. P. 80484Bourj Hammoud, Beirut
Tel. +961 1 4947-86 +961 1 4982-72+961 3 2745-39Fax +961 1 4949-71 [email protected]
Luxemburg
MontagewerkVertriebService
Brüssel CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
Malaysia
MontagewerkVertriebService
Johore SEW-EURODRIVE SDN BHD No. 95, Jalan Seroja 39, Taman Johor Jaya81000 Johor Bahru, JohorWest Malaysia
Tel. +60 7 3549409Fax +60 7 [email protected]
Marokko
Vertrieb Casablanca S. R. M.Société de Réalisations Mécaniques 5, rue Emir Abdelkader05 Casablanca
Tel. +212 2 6186-69 + 6186-70 + 6186-71Fax +212 2 [email protected]
Mazedonien
Vertrieb Skopje SGS-Skopje / Macedonia"Teodosij Sinactaski” 6691000 Skopje / Macedonia
Tel. +389 2 385 466Fax +389 2 384 [email protected]
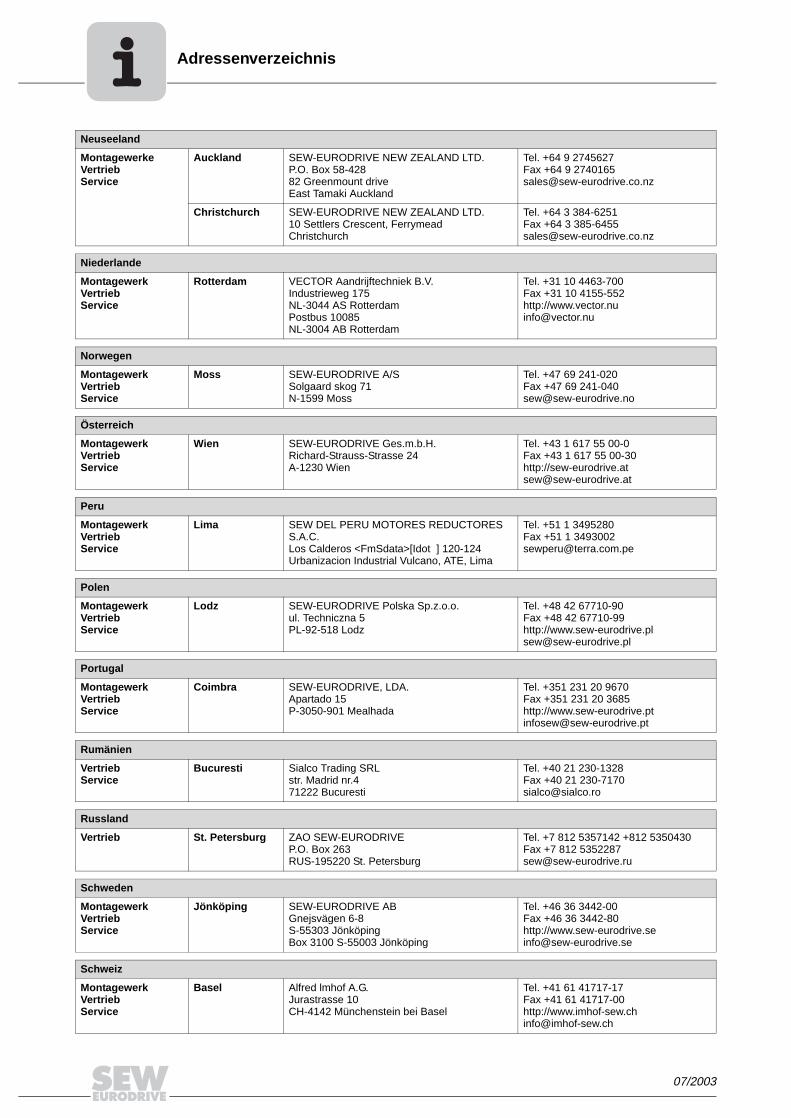
07/2003
Adressenverzeichnis
Neuseeland
MontagewerkeVertriebService
Auckland SEW-EURODRIVE NEW ZEALAND LTD. P.O. Box 58-428 82 Greenmount driveEast Tamaki Auckland
Tel. +64 9 2745627Fax +64 9 [email protected]
Christchurch SEW-EURODRIVE NEW ZEALAND LTD. 10 Settlers Crescent, FerrymeadChristchurch
Tel. +64 3 384-6251Fax +64 3 [email protected]
Niederlande
MontagewerkVertriebService
Rotterdam VECTOR Aandrijftechniek B.V. Industrieweg 175 NL-3044 AS RotterdamPostbus 10085NL-3004 AB Rotterdam
Tel. +31 10 4463-700Fax +31 10 4155-552http://[email protected]
Norwegen
MontagewerkVertriebService
Moss SEW-EURODRIVE A/SSolgaard skog 71N-1599 Moss
Tel. +47 69 241-020Fax +47 69 [email protected]
Österreich
MontagewerkVertriebService
Wien SEW-EURODRIVE Ges.m.b.H. Richard-Strauss-Strasse 24A-1230 Wien
Tel. +43 1 617 55 00-0Fax +43 1 617 55 00-30http://[email protected]
Peru
MontagewerkVertriebService
Lima SEW DEL PERU MOTORES REDUCTORES S.A.C.Los Calderos <FmSdata>[Idot ] 120-124Urbanizacion Industrial Vulcano, ATE, Lima
Tel. +51 1 3495280Fax +51 1 [email protected]
Polen
MontagewerkVertriebService
Lodz SEW-EURODRIVE Polska Sp.z.o.o.ul. Techniczna 5 PL-92-518 Lodz
Tel. +48 42 67710-90Fax +48 42 67710-99http://[email protected]
Portugal
MontagewerkVertriebService
Coimbra SEW-EURODRIVE, LDA. Apartado 15 P-3050-901 Mealhada
Tel. +351 231 20 9670Fax +351 231 20 3685http://[email protected]
Rumänien
VertriebService
Bucuresti Sialco Trading SRL str. Madrid nr.4 71222 Bucuresti
Tel. +40 21 230-1328Fax +40 21 230-7170 [email protected]
Russland
Vertrieb St. Petersburg ZAO SEW-EURODRIVE P.O. Box 263 RUS-195220 St. Petersburg
Tel. +7 812 5357142 +812 5350430Fax +7 812 [email protected]
Schweden
MontagewerkVertriebService
Jönköping SEW-EURODRIVE ABGnejsvägen 6-8S-55303 JönköpingBox 3100 S-55003 Jönköping
Tel. +46 36 3442-00Fax +46 36 3442-80http://[email protected]
Schweiz
MontagewerkVertriebService
Basel Alfred lmhof A.G.Jurastrasse 10 CH-4142 Münchenstein bei Basel
Tel. +41 61 41717-17Fax +41 61 41717-00http://[email protected]
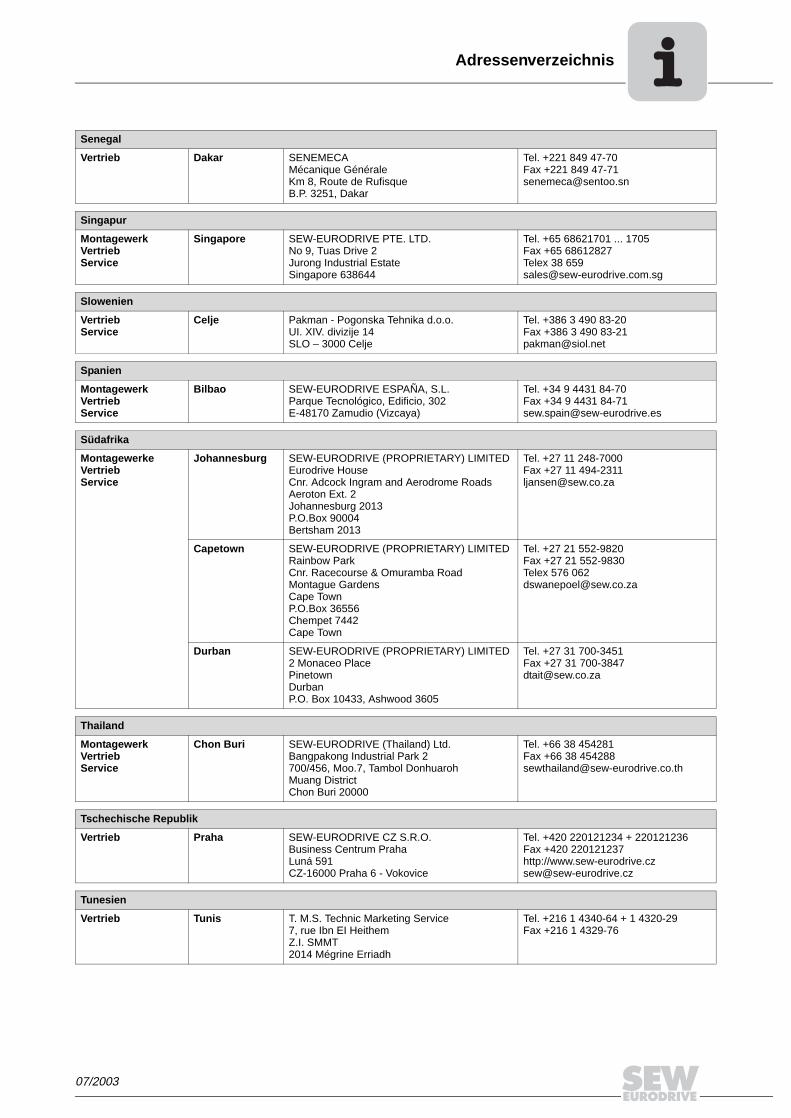
07/2003
Adressenverzeichnis
Senegal
Vertrieb Dakar SENEMECA Mécanique GénéraleKm 8, Route de Rufisque B.P. 3251, Dakar
Tel. +221 849 47-70Fax +221 849 [email protected]
Singapur
MontagewerkVertriebService
Singapore SEW-EURODRIVE PTE. LTD. No 9, Tuas Drive 2 Jurong Industrial Estate Singapore 638644
Tel. +65 68621701 ... 1705Fax +65 68612827Telex 38 659 [email protected]
Slowenien
VertriebService
Celje Pakman - Pogonska Tehnika d.o.o.UI. XIV. divizije 14SLO – 3000 Celje
Tel. +386 3 490 83-20Fax +386 3 490 [email protected]
Spanien
MontagewerkVertriebService
Bilbao SEW-EURODRIVE ESPAÑA, S.L. Parque Tecnológico, Edificio, 302E-48170 Zamudio (Vizcaya)
Tel. +34 9 4431 84-70Fax +34 9 4431 [email protected]
Südafrika
MontagewerkeVertriebService
Johannesburg SEW-EURODRIVE (PROPRIETARY) LIMITEDEurodrive House Cnr. Adcock Ingram and Aerodrome RoadsAeroton Ext. 2Johannesburg 2013P.O.Box 90004Bertsham 2013
Tel. +27 11 248-7000Fax +27 11 [email protected]
Capetown SEW-EURODRIVE (PROPRIETARY) LIMITED Rainbow ParkCnr. Racecourse & Omuramba RoadMontague GardensCape TownP.O.Box 36556Chempet 7442 Cape Town
Tel. +27 21 552-9820Fax +27 21 552-9830Telex 576 [email protected]
Durban SEW-EURODRIVE (PROPRIETARY) LIMITED2 Monaceo PlacePinetownDurbanP.O. Box 10433, Ashwood 3605
Tel. +27 31 700-3451Fax +27 31 [email protected]
Thailand
MontagewerkVertriebService
Chon Buri SEW-EURODRIVE (Thailand) Ltd.Bangpakong Industrial Park 2700/456, Moo.7, Tambol DonhuarohMuang DistrictChon Buri 20000
Tel. +66 38 454281Fax +66 38 [email protected]
Tschechische Republik
Vertrieb Praha SEW-EURODRIVE CZ S.R.O.Business Centrum Praha Luná 591CZ-16000 Praha 6 - Vokovice
Tel. +420 220121234 + 220121236Fax +420 220121237http://[email protected]
Tunesien
Vertrieb Tunis T. M.S. Technic Marketing Service7, rue Ibn EI Heithem Z.I. SMMT2014 Mégrine Erriadh
Tel. +216 1 4340-64 + 1 4320-29Fax +216 1 4329-76
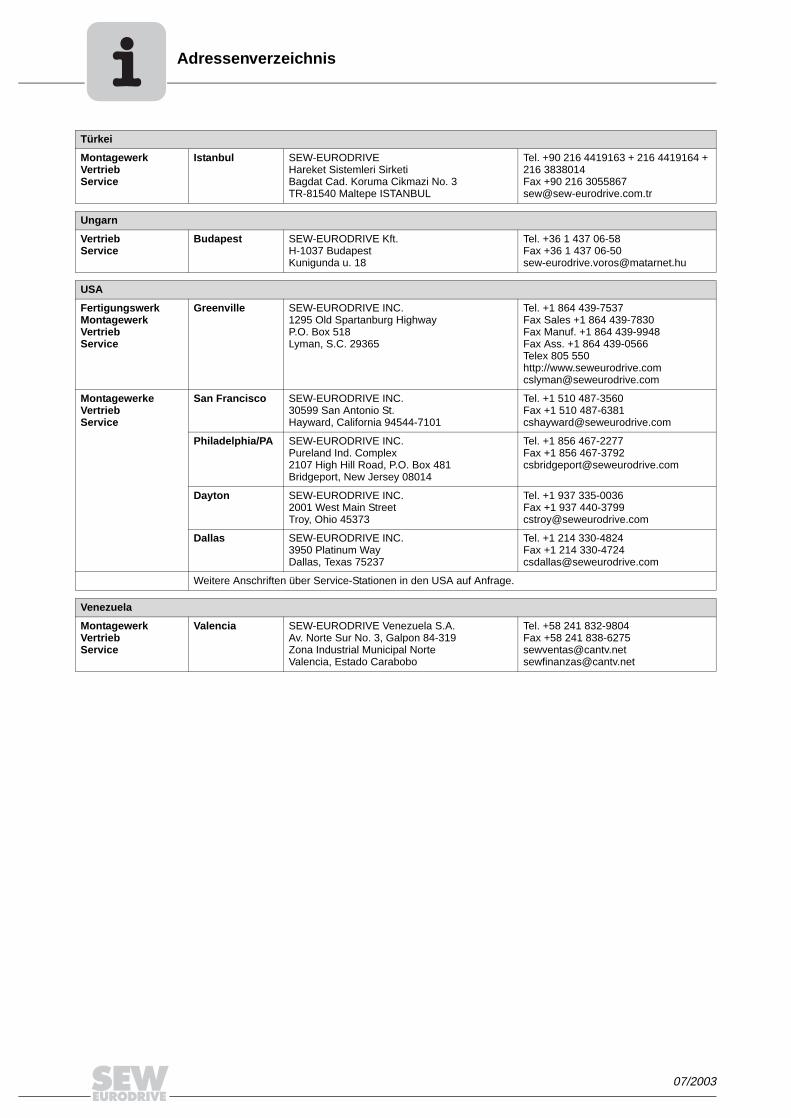
07/2003
Adressenverzeichnis
Türkei
MontagewerkVertriebService
Istanbul SEW-EURODRIVE Hareket Sistemleri Sirketi Bagdat Cad. Koruma Cikmazi No. 3 TR-81540 Maltepe ISTANBUL
Tel. +90 216 4419163 + 216 4419164 + 216 3838014Fax +90 216 [email protected]
Ungarn
VertriebService
Budapest SEW-EURODRIVE Kft.H-1037 BudapestKunigunda u. 18
Tel. +36 1 437 06-58Fax +36 1 437 [email protected]
USA
FertigungswerkMontagewerkVertriebService
Greenville SEW-EURODRIVE INC. 1295 Old Spartanburg Highway P.O. Box 518Lyman, S.C. 29365
Tel. +1 864 439-7537Fax Sales +1 864 439-7830Fax Manuf. +1 864 439-9948Fax Ass. +1 864 439-0566Telex 805 550 http://[email protected]
MontagewerkeVertriebService
San Francisco SEW-EURODRIVE INC. 30599 San Antonio St.Hayward, California 94544-7101
Tel. +1 510 487-3560Fax +1 510 [email protected]
Philadelphia/PA SEW-EURODRIVE INC. Pureland Ind. Complex 2107 High Hill Road, P.O. Box 481Bridgeport, New Jersey 08014
Tel. +1 856 467-2277Fax +1 856 [email protected]
Dayton SEW-EURODRIVE INC.2001 West Main Street Troy, Ohio 45373
Tel. +1 937 335-0036Fax +1 937 [email protected]
Dallas SEW-EURODRIVE INC.3950 Platinum Way Dallas, Texas 75237
Tel. +1 214 330-4824Fax +1 214 [email protected]
Weitere Anschriften über Service-Stationen in den USA auf Anfrage.
Venezuela
MontagewerkVertriebService
Valencia SEW-EURODRIVE Venezuela S.A.Av. Norte Sur No. 3, Galpon 84-319Zona Industrial Municipal NorteValencia, Estado Carabobo
Tel. +58 241 832-9804Fax +58 241 [email protected]@cantv.net

SEW-EURODRIVE GmbH & Co KG · P.O. Box 3023 · D-76642 Bruchsal/GermanyPhone +49 7251 75-0 · Fax +49 7251 75-1970
http://www.sew-eurodrive.com · [email protected]