design and development of a soft actuator for a robot inspired by the octopus arm
TRANSCRIPT

DESIGN AND DEVELOPMENT OF A SOFT ACTUATOR FOR A ROBOT INSPIRED BY THE OCTOPUS ARM
Cecilia Laschi*, Barbara Mazzolai*, Virgilio Mattoli, Matteo Cianchetti*, Paolo Dario*
ARTS (Advanced Robotics Technology and Systems) and CRIM (Centre of Research In Microengineering) Laboratories, Scuola Superiore Sant'Anna, Pisa, Italy
*also with the Italian Institute of Technology (IIT)
The octopus arm presents peculiar features, like the capability of bending in all directions, producing fast elongations, and varying its stiffness. Such features are very attractive from a robotics point of view. In the octopus, these unique motor capabilities are given by the peculiar muscular structure of the octopus arm, named muscular hydrostat, that creates a sort of antagonistic mechanism between dif-ferent muscle fibres and reduce the contraction requirements for the single muscle. By taking inspiration from this, we propose the de-sign of a robot arm completely soft and compliant, composed of sili-cone muscles that can contract and that are arranged according to the anatomy of the octopus arm. The contractile units are built with EAP (Electro-Active Polymer) technologies, with a particular geometry that increases the contraction range and force. Contraction tests on prototypes of the contracting units show a very good similarity with a theoretical model and support the possibility of building the whole robotic octopus-like arm.
Introduction
The concept of taking inspiration from Nature to improve technol-ogy has been pursued by many scientists and engineers developing new materials, sensors, and mechanisms. Biologically-inspired ap-
2
proaches have been traditionally widely adopted in robotics (Beer et al., 1997; Vincent, 2005; Brooks, 1991). Actually, mimicking ani-mals requires in many cases to investigate new components, too, like new materials, mechanisms, sensors, actuators, and control schemes (Sanchez et al., 2005; Bar-Cohen, 2004). The octopus is a paradigmatic example for bioinspired robotics. The octopus is an invertebrate sea animal with amazing motor capabili-ties and intelligent behaviour, with respect to its position in the evo-lutionary scale (Hochner et al., 2003; Hochner et al., 2006). Most recognized theories explain that this enhanced behaviour and capa-bility of interaction with the environment is due to the peculiar mor-phology of the octopus body, and especially to the form and materi-als of its limbs (arms). The motor capabilities of the arms are far beyond any existing robots, for their dexterity and for the variability of their stiffness, on a very wide range. The octopus arm has served as an inspiration in robotics, to develop the so-called continuum robots, with omnidirectional mobility. Walker and co-workers developed continuum robots that, in contrast to traditional rigid-link robots, feature a continuous backbone with no joints (Walker et al., 2005). Potential applications of these robots include navigation and operation inside complex, congested envi-ronments in search and rescue operations, or inside the human body in medical applications. In this work, we propose the design of a robot arm completely soft and compliant, composed of silicone muscles that can contract and that are arranged according to the anatomy of the octopus arm.
Design of an octopus-like robotic arm
By taking inspiration from the octopus arm, the work presented here is aimed at designing and developing a robotic limb with some of the features of the octopus tentacle, like the capability of shorten-ing/elongating, the capability of bending in all directions, the capa-bility of controlling its stiffness. The design of the robotic tentacle is based on the consideration that such features are given by the pecu-liar muscle arrangement of biological tentacles.
3
In the design of the robotic tentacle, we consider specifically the longitudinal muscles and the transverse muscles, and their reciprocal actions. We know from biology that when the longitudinal muscles contract and the transverse muscles are relaxed, then the tentacle shortens. On the contrary, when the transverse muscles contract and the longi-tudinal muscles are relaxed, they are ‘squeezed’ and the tentacle greatly elongates (Smith & Kier, 1989). This is due to the fact that the tentacle has hydrostatic muscles, which do not change their vol-ume during the contraction. The relation between the diameter of a cylinder and its length, with constant volume, is:
2
2⎟⎠⎞
⎜⎝⎛
=DVL
π
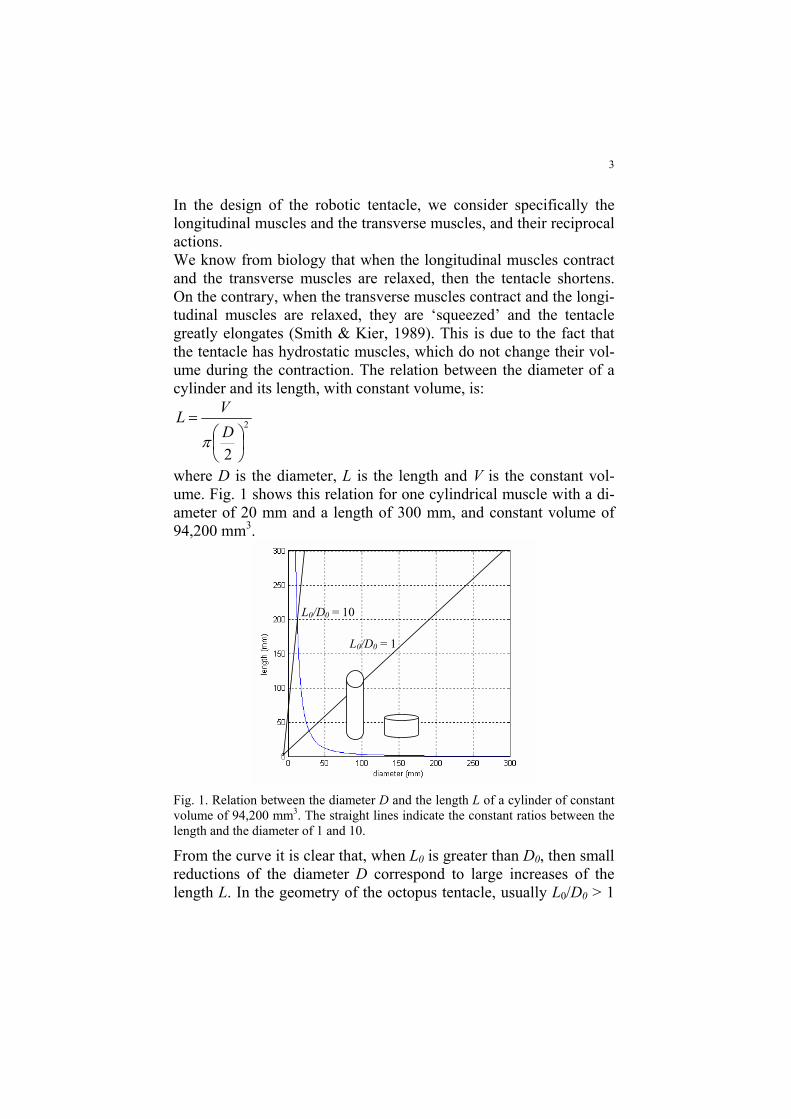
where D is the diameter, L is the length and V is the constant vol-ume. Fig. 1 shows this relation for one cylindrical muscle with a di-ameter of 20 mm and a length of 300 mm, and constant volume of 94,200 mm3.
Fig. 1. Relation between the diameter D and the length L of a cylinder of constant volume of 94,200 mm3. The straight lines indicate the constant ratios between the length and the diameter of 1 and 10.
From the curve it is clear that, when L0 is greater than D0, then small reductions of the diameter D correspond to large increases of the length L. In the geometry of the octopus tentacle, usually L0/D0 > 1
L0/D0 = 1
L0/D0 = 10
4
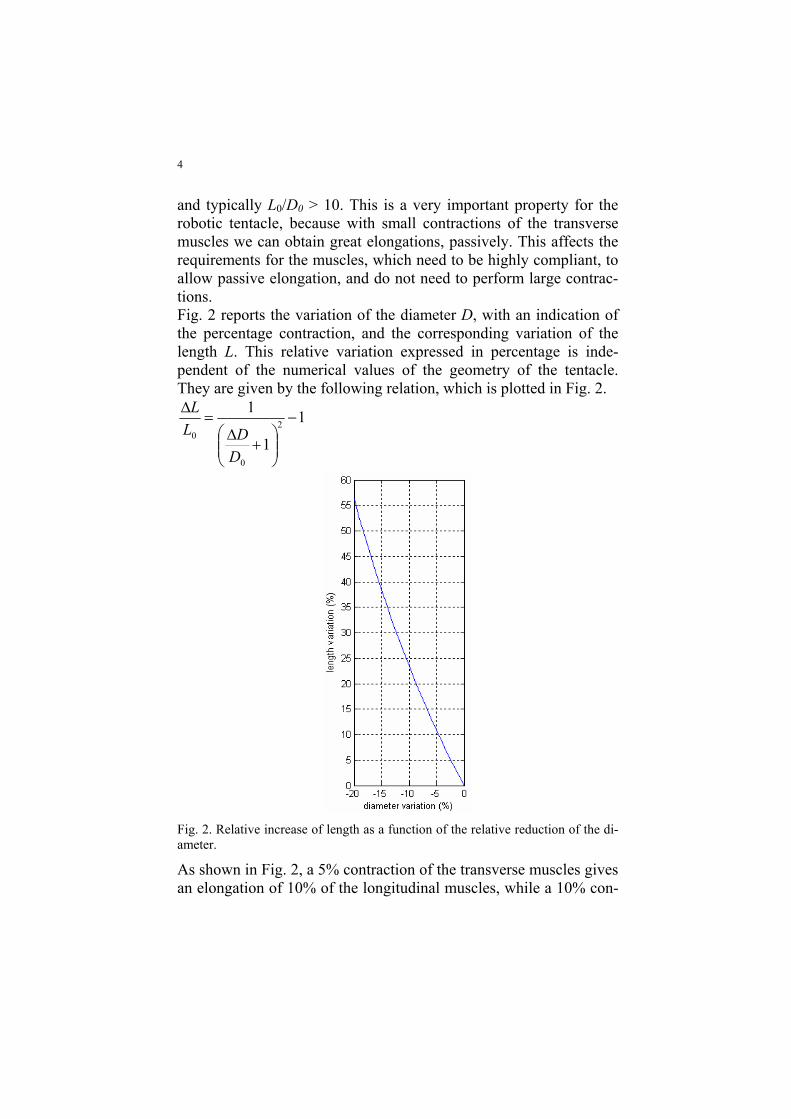
and typically L0/D0 > 10. This is a very important property for the robotic tentacle, because with small contractions of the transverse muscles we can obtain great elongations, passively. This affects the requirements for the muscles, which need to be highly compliant, to allow passive elongation, and do not need to perform large contrac-tions. Fig. 2 reports the variation of the diameter D, with an indication of the percentage contraction, and the corresponding variation of the length L. This relative variation expressed in percentage is inde-pendent of the numerical values of the geometry of the tentacle. They are given by the following relation, which is plotted in Fig. 2.
1
1
12
0
0
−
⎟⎟⎠
⎞⎜⎜⎝
⎛+
Δ=
Δ
DDL
L
Fig. 2. Relative increase of length as a function of the relative reduction of the di-ameter.
As shown in Fig. 2, a 5% contraction of the transverse muscles gives an elongation of 10% of the longitudinal muscles, while a 10% con-
5
traction of the transverse muscles gives an elongation of 23.5%. Due to this, the speed of elongation is also higher than the speed of con-traction of the transverse muscles. In the following, we present the design and development of a first prototype of muscle for the robotic tentacle, which is the basic element constituting both longitudinal and transverse muscles, to be arranged following the internal anat-omy of the octopus arm.
Design of soft actuators for the octopus-like arm
Actuators represent the real bottleneck in many robotic applications, especially in biomimetic ones. Currently available actuators are mainly electromagnetic and their performance is different from the one achieved by natural muscles. Main limitations involve inertia and back-drivability, stiffness control, power consumption. In the last few years new and promising actuator technologies (Pons, 2005) have emerged thus offering new possibilities to fill the gap between natural muscles and artificial artefacts. Among them Electro-Active Polymers (and dielectric elastomers in particular) seem to present characteristics that theoretically allow to reach the performances re-quired, in terms of force, power density, response time and passive deformation capability. In dielectric elastomeric actuators (Pelrine et al., 2002) the electro-static attraction between conductive layers applied to two surfaces of elastomeric film induces compressive strain under a suitable field (in the order of 150 MV/m). The mechanical driving force of dielectric EAPs derives from Cou-lomb charge attraction. When a capacitor is charged by application of an electric field, the electrodes tend to move closer squeezing the elastomeric dielectric material that is between them. The energy density of the electric field is:
202
1 Eu rεε=,
6
where εr and ε0 are the dielectric constants and E the electric field. Force between the electrodes is:
Az
VdzdUF r
2
20εε
=−=
and Stress is
2
20
zVS rεε
=
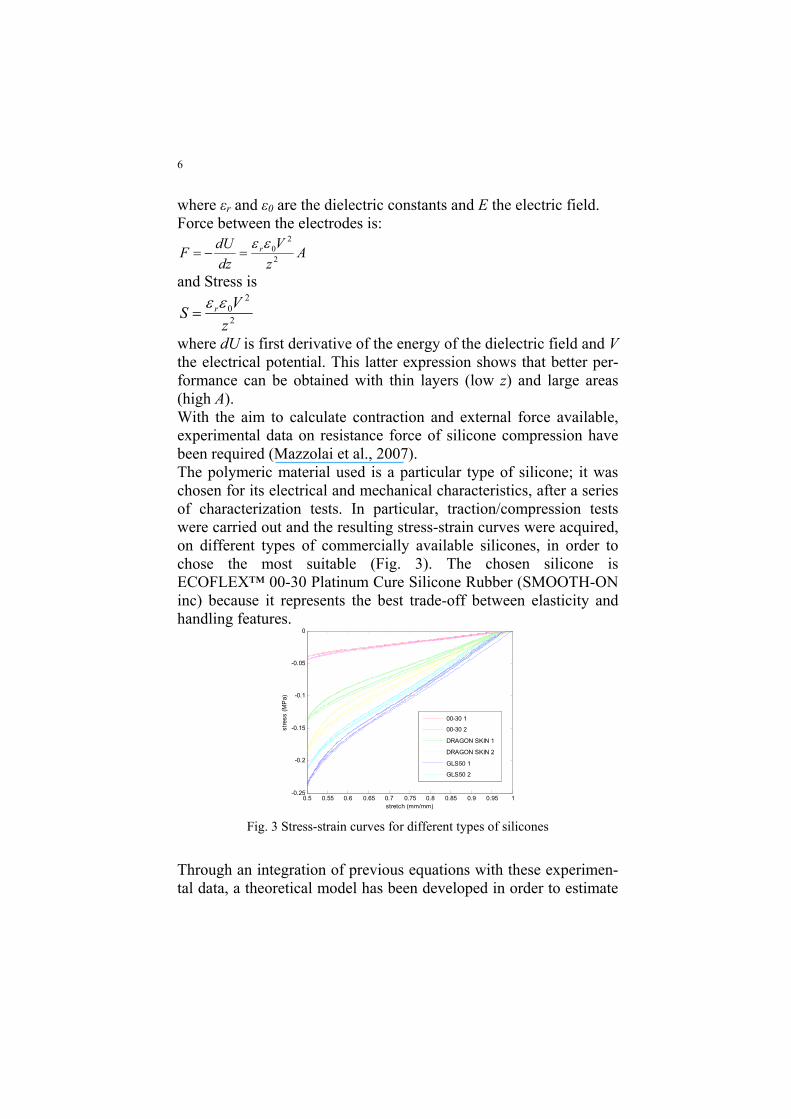
where dU is first derivative of the energy of the dielectric field and V the electrical potential. This latter expression shows that better per-formance can be obtained with thin layers (low z) and large areas (high A). With the aim to calculate contraction and external force available, experimental data on resistance force of silicone compression have been required (Mazzolai et al., 2007). The polymeric material used is a particular type of silicone; it was chosen for its electrical and mechanical characteristics, after a series of characterization tests. In particular, traction/compression tests were carried out and the resulting stress-strain curves were acquired, on different types of commercially available silicones, in order to chose the most suitable (Fig. 3). The chosen silicone is ECOFLEX™ 00-30 Platinum Cure Silicone Rubber (SMOOTH-ON inc) because it represents the best trade-off between elasticity and handling features.
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1-0.25
-0.2
-0.15
-0.1
-0.05
0
stretch (mm/mm)
stre
ss (M
Pa)
00-30 1
00-30 2
DRAGON SKIN 1
DRAGON SKIN 2
GLS50 1
GLS50 2
Fig. 3 Stress-strain curves for different types of silicones
Through an integration of previous equations with these experimen-tal data, a theoretical model has been developed in order to estimate
7
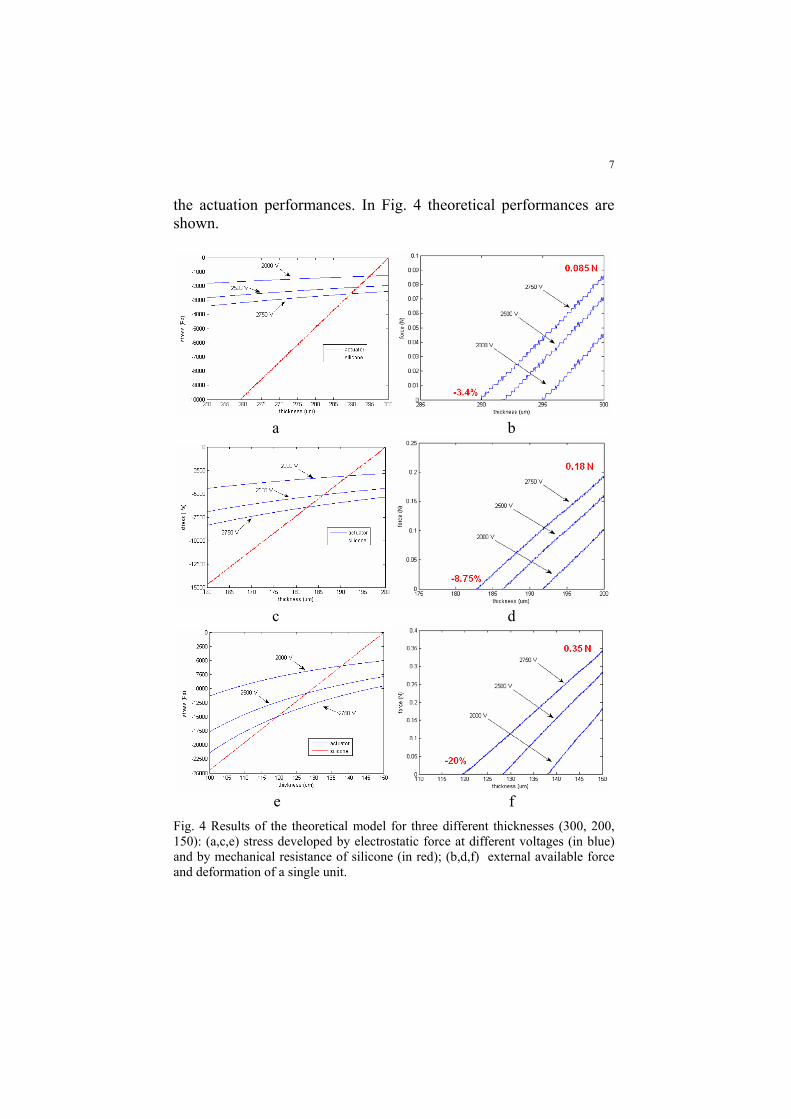
the actuation performances. In Fig. 4 theoretical performances are shown.
a b
c d
e f
Fig. 4 Results of the theoretical model for three different thicknesses (300, 200, 150): (a,c,e) stress developed by electrostatic force at different voltages (in blue) and by mechanical resistance of silicone (in red); (b,d,f) external available force and deformation of a single unit.
8
The external available force is given by the difference between the electrostatic force and the resistant force of the silicone. Referring to left plots of Fig. 4 from right to left till the red curve and the blue one don’t cross, the external force is positive; to the left of this point the resistant force is too high and no further compression is achiev-able. Analyzing reachable values, it is clear that an actuator made by layers of 150 μm of thickness can lead to a contraction of 20%, that is sufficient for the aim. Since the contraction direction is perpendicular to the area of the electrodes, in order to exploit this principle, it is necessary to stack the elementary units in order to obtain extended device able to con-tract along the longer axis. A new actuator structure has been thus developed; the structure is built by folding many times a thin and soft polymeric substrate (the dielectric material) covered on the 2 sides by thin metal films that work as electrodes (see Fig. 6 (a)). The polymeric material used is a particular type of silicone; it was cho-sen for its electrical and mechanical characteristics, by using the equation of force and after a series of characterization tests.
Fabrication of EAP actuators for the octopus-like arm
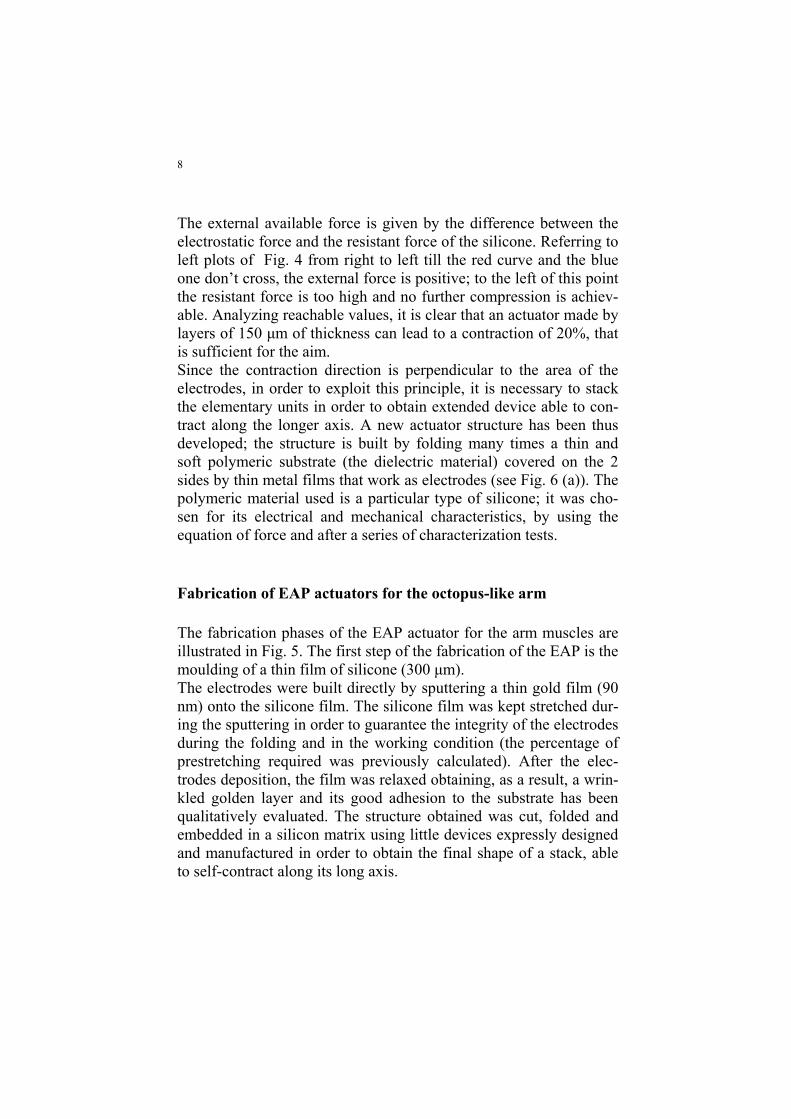
The fabrication phases of the EAP actuator for the arm muscles are illustrated in Fig. 5. The first step of the fabrication of the EAP is the moulding of a thin film of silicone (300 μm). The electrodes were built directly by sputtering a thin gold film (90 nm) onto the silicone film. The silicone film was kept stretched dur-ing the sputtering in order to guarantee the integrity of the electrodes during the folding and in the working condition (the percentage of prestretching required was previously calculated). After the elec-trodes deposition, the film was relaxed obtaining, as a result, a wrin-kled golden layer and its good adhesion to the substrate has been qualitatively evaluated. The structure obtained was cut, folded and embedded in a silicon matrix using little devices expressly designed and manufactured in order to obtain the final shape of a stack, able to self-contract along its long axis.
9
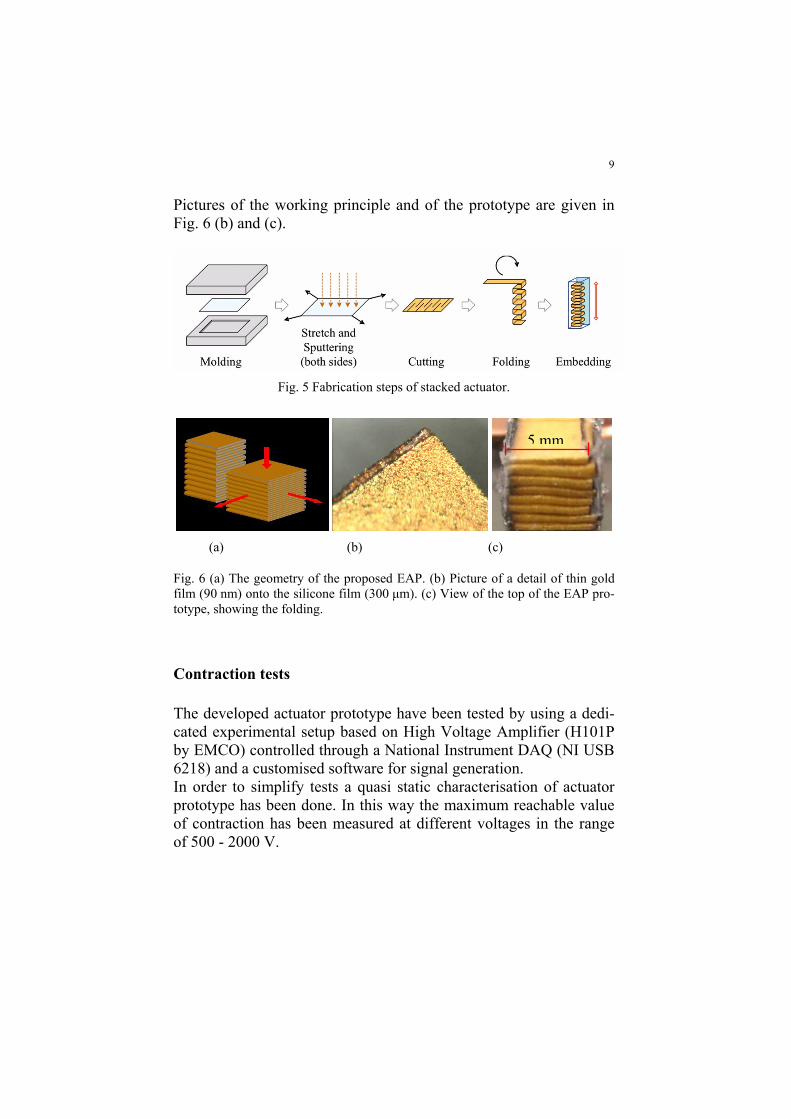
Pictures of the working principle and of the prototype are given in Fig. 6 (b) and (c).
Fig. 5 Fabrication steps of stacked actuator.
(a) (b) (c)
Fig. 6 (a) The geometry of the proposed EAP. (b) Picture of a detail of thin gold film (90 nm) onto the silicone film (300 μm). (c) View of the top of the EAP pro-totype, showing the folding.
Contraction tests
The developed actuator prototype have been tested by using a dedi-cated experimental setup based on High Voltage Amplifier (H101P by EMCO) controlled through a National Instrument DAQ (NI USB 6218) and a customised software for signal generation. In order to simplify tests a quasi static characterisation of actuator prototype has been done. In this way the maximum reachable value of contraction has been measured at different voltages in the range of 500 - 2000 V.
5 mm
10
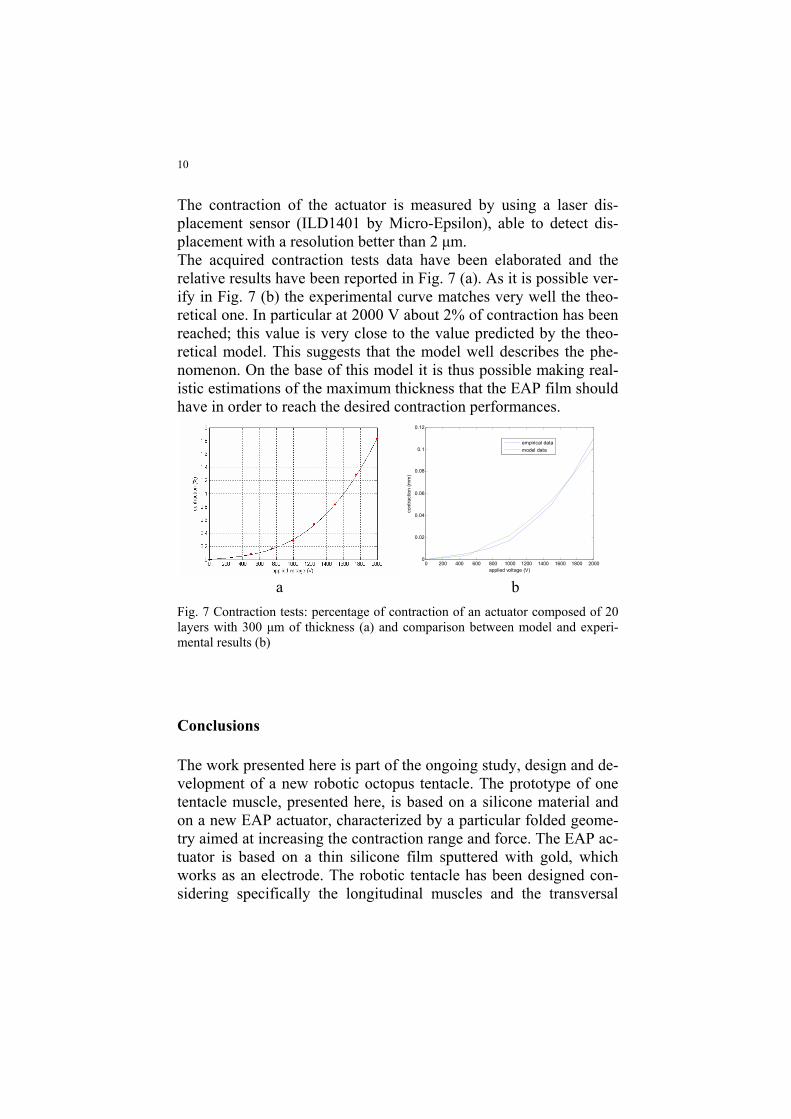
The contraction of the actuator is measured by using a laser dis-placement sensor (ILD1401 by Micro-Epsilon), able to detect dis-placement with a resolution better than 2 μm. The acquired contraction tests data have been elaborated and the relative results have been reported in Fig. 7 (a). As it is possible ver-ify in Fig. 7 (b) the experimental curve matches very well the theo-retical one. In particular at 2000 V about 2% of contraction has been reached; this value is very close to the value predicted by the theo-retical model. This suggests that the model well describes the phe-nomenon. On the base of this model it is thus possible making real-istic estimations of the maximum thickness that the EAP film should have in order to reach the desired contraction performances.
0 200 400 600 800 1000 1200 1400 1600 1800 20000
0.02
0.04
0.06
0.08
0.1
0.12
applied voltage (V)
cont
ract
ion
(mm
)
empirical datamodel data
a b
Fig. 7 Contraction tests: percentage of contraction of an actuator composed of 20 layers with 300 μm of thickness (a) and comparison between model and experi-mental results (b)
Conclusions
The work presented here is part of the ongoing study, design and de-velopment of a new robotic octopus tentacle. The prototype of one tentacle muscle, presented here, is based on a silicone material and on a new EAP actuator, characterized by a particular folded geome-try aimed at increasing the contraction range and force. The EAP ac-tuator is based on a thin silicone film sputtered with gold, which works as an electrode. The robotic tentacle has been designed con-sidering specifically the longitudinal muscles and the transversal

11
muscles, and their reciprocal actions. Data reported are not numeri-cally sufficient for the aim, but they validate the developed theoreti-cal model and support the possibility of building the whole robotic octopus-like arm. This means that an actuator with 150 μm layers should reach 20% of contraction and 0.35 N of force. Manufacturing processes have to be optimized, but already allow obtaining functional devices with a smart design. The ongoing work is devoted to further studies on materials in order to improve the ac-tuator performance, in terms of contraction capability. This will allow to fabricate and to control the tentacle muscles with the EAP technology proposed, and to arrange them according to the biological tentacle muscular geometry. This allows obtaining a com-pletely compliant robot body, with no rigid structures, able of fast elongation, multidirectional bending, and varying stiffness.
References
Bar-Cohen Y., “Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges”, SPIE Press, Bellingham, WA, 2004.
Beer R. D., Quinn R. D., Chiel H. J., and Ritzmann R. E., “Biologically inspired approaches to robotics”, Communications of the ACM, 40(3):, pp. 30-38, 1997.
Brooks, R.A., “New Approaches to Robotics”, Science, 253:1227-1232, 1991. Hochner B., Brown E. R., Langella M., Shomrat T., Fiorito G. “A Learning and Memory Area in
the Octopus Brain Manifests a Vertebrate-Like Long-Term Potentiation”, J Neurophysiol 90: 3547-3554, 2003.
Hochner B., Shomrat T., Fiorito G., “The Octopus: A Model for a Comparative Analysis of the Evolution of Learning and Memory Mechanisms”, Biol. Bull. 210: 308-317, 2006.
Kier W. M, Smith K. K. “Tongues, tentacles and trunks: the biomechanics of movement in mus-cular-hydrostats”. Zool J Linn Soc, 83: 307-324, 1985.
Kier W. “The arrangement and function of Molluscan muscle”, The Mollusca, Vol.II, 1988. Mazzolai B., Laschi C., Cianchetti M., Patane F., Bassi Luciani L., Izzo I., Dario P. “Biorobotic
investigation on the muscle structure of an octopus tentacle”, Conf Proc IEEE Eng Med Biol Soc, 1:1571-1474, 2007.
Pelrine R., R. Kornbluh, Q. Pei, S. Stanford, S. Oh, and J. Eckerle, “Dielectric elastomer artifi-cial muscle actuators: Toward biomimetic motion,” SPIE Smart Structures and Materials, Electroactive Polymer Actuators and Devices, vol.4695, pp. 126–137, 2002.
Pons J.L., “Emerging Actuator Technologies: A Micromechatronic Approach”, John Wiley & Sons, Ltd, England, 2005.
Rokni D. and Hochner, “Ionic currents underlying fast action potentials in the obliquely striated muscle cells of the octopus arm”. J Neurophysiol 88: 3386–3397, 2002.
Sanchez C., Arribart H. and Guille M. M. G., “Biomimetism and bioinspiration as tools for the design of innovative materials and systems”. Nature Materials. Vol. 4, April, 2005.
Vincent J. F. V. Stealing ideas from nature. Deployable Structures. Edited by S. Pellegrino. Vi-enna: Springer, pp. 51-58, 2005.

12
Walker, I., Dawson, D., Flash, T., Grasso, F., Hanlon, R., Hochner, B., Kier, W., Pagano, C., Rahn, C. and Zhang, Q. “Continuum Robot Arms Inspired by Cephalopods.” SPIE The Inter-national Society for Optical Engineering Defense and Security Symposium, Orlando, FL, March, 2005.