deliverable b4 3
TRANSCRIPT
Project contract number: TIP5-CT-2006-031406
FLAGSHIP
European Framework for
Safe, Efficient and Environmentally-friendly Ship Operations Instrument type: IP Specific programme: Sustainable Surface Transport
D-B4.3 Modes of operations
Start date of project: 2007-01-01 Duration of project: 48 months
Due date: December 2009 (V2.0) Actual delivery date: 2009-12-31
Lead contractor: Kongsberg Maritime AS
Revision: V2.0
Project co-funded by the European Commission within the Sixth Framework Programme (2002-2006) Dissemination Level
PU Public Public
PP Restricted to other programme participants (including the Commission Services)
RE Restricted to a group specified by the consortium (including the Commission Services)
CO Confidential, only for members of the consortium (including the Commission Services)
FLAGSHIP
D-B4.3 2010-02-16
2 of 43
Document summary information
Authors and contributors
Initials Author Organisation Role
GH Geir Hasnes Kongsberg Maritime Author, editor
ØJR Ørnulf Jan Rødseth MARINTEK Main contributor
Others as listed in Sec. 1.3 Flagship B4 Comments/Validation
Revision history
Rev. Who Date Comment
0.1 GH 2008-09-30 First draft
0.2 GH Updates after meeting in Trondheim Oct. 18
0.3 GH 2008-12-16 Updates after meeting in Oslo Dec. 03
1.0 ØJR 2008-12-18 Final draft, minor editorials before internal review
2.0 ØJR 2009-12-31 Change to public, minor editorials
Quality Control
Who Date
Checked by lead partner Kongsberg Maritime, Arild Riis
Checked by SP Flagship B4 partners
Checked by internal reviewer Portline SA, Mario Silva
Company internal coding
Main responsible Internal reference number
Kongsberg Maritime AS
Disclaimer
The content of the publication herein is the sole responsibility of the publishers and it does not necessarily represent the views expressed by the European Commission or its services.
While the information contained in the documents is believed to be accurate, the authors(s) or any other participant in the FLAGSHIP consortium make no warranty of any kind with regard to this material including, but not limited to the implied warranties of merchantability and fitness for a particular purpose.
Neither the FLAGSHIP Consortium nor any of its members, their officers, employees or agents shall be responsible or liable in negligence or otherwise howsoever in respect of any inaccuracy or omission herein.
Without derogating from the generality of the foregoing neither the FLAGSHIP Consortium nor any of its members, their officers, employees or agents shall be liable for any direct or indirect or consequential loss or damage caused by or arising from any information advice or inaccuracy or omission herein.
Although the content in this document is based on discussions with actual ship owners and operators, it represents only a general opinion on how ship accidents could or should be handled. It does not necessarily reflect actual procedures or operational principles employed by any involved participant.
FLAGSHIP
D-B4.3 2010-02-16
3 of 43
Executive summary
This is the second version of this document. The main change from the previous issue is that it has changed status to public and that some minor editorials have been made.
This document contains the result of the third task of the Flagship subproject B4 on Alarm filtering, Task B4.3 Mode of Operation.
It covers an in-depth discussion of ship operational modes (operational states), related to navigational status, ship operations, and equipment.
Focus in this document is on operational considerations. Deliverables 1 and 2 within the B4 subproject focused on ship types and equipment types.
The report gives a comprehensive overview of equipment related to ship operations and functions, and the alert situations that will have to be taken care of by a centralized alert management system.
The relationship between the ship operations and the vessel’s situation, combined by assessing the ship condition, voyage phase, constraints in the environment or on board, emergencies, etc., is thoroughly investigated.
FLAGSHIP
D-B4.3 2010-02-16
4 of 43
Table of contents
1. Introduction ............................................................................................................................ 8 1.1 Scope ................................................................................................................................ 8 1.2 Contribution to the state of the art .................................................................................... 8 1.3 Background ...................................................................................................................... 8
2. Word explanations and definitions .................................................................................... 10 2.1 Attention mode ............................................................................................................... 10 2.2 Emergency ...................................................................................................................... 10 2.3 Environment ................................................................................................................... 10 2.4 Equipment ...................................................................................................................... 10 2.5 Function .......................................................................................................................... 10 2.6 Mode ............................................................................................................................... 10 2.7 Navigational status ......................................................................................................... 11 2.8 Operation ........................................................................................................................ 11 2.9 Operational constraints ................................................................................................... 11 2.10 Operational mode ........................................................................................................... 11 2.11 Operational state ............................................................................................................. 11 2.12 Situation ......................................................................................................................... 11 2.13 Ship condition ................................................................................................................ 11 2.14 Ship operation ................................................................................................................ 11 2.15 Voyage phase ................................................................................................................. 12
3. A high level semantic model of the vessel .......................................................................... 13 3.1 Ship condition ................................................................................................................ 14 3.2 Environment ................................................................................................................... 14 3.3 Emergency ...................................................................................................................... 14 3.4 Voyage phase ................................................................................................................. 14 3.5 Ship operations ............................................................................................................... 15 3.6 Functions ........................................................................................................................ 15 3.7 Equipment ...................................................................................................................... 15 3.8 Situation ......................................................................................................................... 15 3.9 Attention mode ............................................................................................................... 15 3.10 Crew ............................................................................................................................... 15 3.11 Functional alert ............................................................................................................... 16 3.12 Technical alert ................................................................................................................ 16 3.13 Local alert display .......................................................................................................... 16 3.14 CAM ............................................................................................................................... 16
4. Ship operational states ......................................................................................................... 17 4.1 Introduction and background ......................................................................................... 17
4.1.1 Normal ship voyage phases ............................................................................. 17 4.2 Navigational status ......................................................................................................... 18
FLAGSHIP
D-B4.3 2010-02-16
5 of 43
4.2.1 Analysing the navigational status codes ......................................................... 18 4.2.2 Ship operational states combined with navigational status ............................. 19
4.3 Ship condition ................................................................................................................ 20 4.4 Operational constraints in the vessel’s environment ...................................................... 20 4.5 Generalised ship attention modes ................................................................................... 22 4.6 Operational states and most common situations ............................................................ 22 4.7 Ship operations ............................................................................................................... 23 4.8 Ship operations with functions ....................................................................................... 24 4.9 Ship operations and equipment ...................................................................................... 28 4.10 Operation and function identification............................................................................. 34
5. Alerts to the CAM ................................................................................................................ 36 5.1 Technical alerts versus functional alerts ........................................................................ 36 5.2 Alerts for the CAM ........................................................................................................ 36 5.3 Deciding alert categories ................................................................................................ 37 5.4 One window pr sender .................................................................................................... 37 5.5 Local decision support ................................................................................................... 37 5.6 Alerts and attention mode .............................................................................................. 38
6. Summary of findings ........................................................................................................... 39
7. References ............................................................................................................................. 41
8. Annexes to the report .......................................................................................................... 42 8.1 ATOMOS II classification ............................................................................................. 42
FLAGSHIP
D-B4.3 2010-02-16
6 of 43
Abbreviations
AIS Automatic Identification System (for ships)
AMVER Automated Mutual Assistance Vessel Rescue System
AP Autopilot
ARPA Automatic Radar Plotting Aid
ASME Altair Special Maritime Enterprise
CAM Central Alert Management
CCTV Closed Circuit Television
COLREG International Regulations for Preventing Collisions at Sea
DGPS Differential Global Positioning System
DNV Det Norske Veritas
DP Dynamic Positioning
DSC Digital Selective Calling – distress signalling for VHF radios
ECDIS Electronic Chart Display and Information System
ECR Engine Control Room
EMC Electro-Magnetic Compatibility
FMEA Failure Mode and Effects Analysis
GMDSS Global Maritime Distress and Safety System
HNS Hazardous and Noxious Substances
HVAC Heating, Ventilation and Air Conditioning
IBS Integrated Bridge System
IMO International Maritime Organization
IO Input / Output
ISM International Safety Management (Code)
LRIT Long Range Identification and Tracking
MSC IMO Maritime Safety Committee
NAVTEX Navigation Text – Navigational / meteorological warnings and forecasts delivery service via teleprinter
NFU Non Follow Up (for steering control)
PA Public Announcement System
PS Process Station (actual system computer processing unit)
FLAGSHIP
D-B4.3 2010-02-16
7 of 43
RORO Roll On, Roll Off
SOLAS International convention for Safety Of Life At Sea
SSAS Ship Security Alert System
STCW Seafarers’ Training, Certification and Watch keeping Code
UNCTAD United Nations Conference on Trade and Development
UNECE United Nations Economic Commission for Europe
VDR Voyage Data Recorder
VHF Very High Frequency radio channels
VOC Volatile Organic Compound
VTS Vessel Traffic Services
WP Work Package
FLAGSHIP
D-B4.3 2010-02-16
8 of 43
1. Introduction
1.1 Scope
The scope and objectives of Flagship subproject B4 on Alarm filtering are described in [FLAGSHIP], pp. 106-11.
This deliverable contains the result of the third task, Task B4.3 Modes of Operation, of the B4 subproject.
It covers an in-depth discussion of ship operational modes, related to navigational status, the context and state of the ship itself, ship operations and functions, and corresponding equipment.
Focus in this document is on ship operational considerations. Deliverables 1 and 2 within the B4 subproject focused on ship types and equipment types. Together, these three deliverables give a comprehensive view of any larger vessel’s operations and equipment, with regards to producing requirements for a centralized alert management, which will be the topic for the next deliverable.
The document will primarily be targeted at ships with integrated bridge systems, where a centralized alert management system is most likely to be used first. However, the general concepts will also be applicable to ships with non-integrated ships, particularly with respects to the general modes of operations. This will be investigated in the next deliverable.
1.2 Contribution to the state of the art
The relationship between ship operations, ship functions and ship equipment is a complex issue that has not been discussed in existing literature in any detail. This report makes a first attempt at defining a semantic model for the vessel and the modes that influence how the crew may behave towards abnormal situations as signalled by an alert.
Further more, the report will give a fairly detailed definition of the different objects that the model consists of and will provide a background for developing more consistent alert management systems for ships. This will be done in forthcoming reports and demonstrations.
One should note that the definitions and models provided by this report not yet have been published to the scientific community and that it has not been validated by that. This means that both model and detailed definitions may change somewhat. However, at the level of detail the model and definitions will be used in the design of the CAM, the content of this report is deemed to be sufficient.
1.3 Background
Participants in this project have been:
ASME, Greece Crude oil carrier operator.
Autronica Fire and Security, Norway Fire and security systems vendor.
Kongsberg Maritime, Norway Dynamic positioning and navigation systems vendor, leader of subproject.
FLAGSHIP
D-B4.3 2010-02-16
9 of 43
MARINTEK, Norway Marine technology research institute.
Minoan Lines, Greece Ferry owner and operator.
Teekay Shipping, Norway Tanker owner and operator.
The main contributors to the report, particularly in terms of editorial work and background information have been Kongsberg Maritime and MARINTEK. Other partners have provided more specific input on specific industry or user requirements as well as being parts in the workshops used as basis for this report.
FLAGSHIP
D-B4.3 2010-02-16
10 of 43
2. Word explanations and definitions
Definitions can also be found in the previous deliverables from this sub-project [D-B4.1], [D-B4.2]. These are not included here unless they have been updated or given a different meaning.
2.1 Attention mode
In this document, we define attention mode to be a certain level of attention with regards to the vessel’s situation. A normal situation will require the lowest level of attention, while certain operations, obstacles, emergencies etc. will heighten the level of attention including the manning of the vessel.
Today there is no direct link between the attention mode and the CAM. It poses, however, some requirements to the manning and to the ongoing operations and functions on board.
2.2 Emergency
In this document, we define an emergency as a special situation that requires a heightened attention and different functions from the other operations and functions on board, in order to cope with the emergency. By the nature of the emergency, it may pose a lot of further requirements to the vessel’s operations.
2.3 Environment
A system’s context is defined as the system together with the actual environment that has an impact on the system. This environment must be defined fully so that operations can be defined that help the overall situation have as little impact on the vessel as possible. In general, the environment will be made up of geographical obstacles, weather obstacles, interactions with other vessels and other objects, etc. Some of these obstacles or constraints are found in the definition of voyage phases.
2.4 Equipment
In this document, all kinds of equipment on board is listed, in order to see whether they ought to communicate alerts to the bridge, and in order to gain an overview of the complex situation on board of a larger vessel.
2.5 Function
Operations are broken down into functions that are more directly related to some special equipment. However, the distinction between operation and function is not conceptually clear and is mostly given for the sake of convenience.
2.6 Mode
The term ‘mode’ is used in widely different ways in the literature. In general it seems to describe a certain state the vessel is in with regards to the voyage, moored, at port, at sea, coastal waters etc. The term should be avoided unless it is qualified, like in the term ‘attention mode’.
FLAGSHIP
D-B4.3 2010-02-16
11 of 43
2.7 Navigational status
The navigational status is taken from a defined set of status messages hat is required to send as status to other vessels in the vicinity. It does not cover all states or situations of a vessel in a good and unambiguous way.
2.8 Operation
An operation is any conceptually related group of work carried out to fulfil some intention with the vessel, for instance loading cargo. An operation is functionally broken down into distinct functions carried out by various pieces of equipment. The distinction between operation and function is not conceptually clear and is used for the sake of understanding and overview.
2.9 Operational constraints
There are several possible constraints to the ship’s normal operations. These range from degradation of the ship itself to damages, emergencies, interaction with various objects in the vicinity, and other environmental constraints.
2.10 Operational mode
See operational state. We choose not to use the term operational mode although it is used in literature.
2.11 Operational state
An operational state can be defined as any state the ship is in that is related to its voyage, e. g. moored, navigating at port or at full speed in open sea, including the operations going on at any stage. It will usually be a combination of voyage phase and ship operations. Such states must be defined for convenience and understanding of the ship’s operations.
2.12 Situation
Many issues in the vessel’s environment have an impact on the vessel, related to weather, obstructions, or interactions with other vessels. Emergencies are regarded as (unwanted) situations. Any vessel will be in any of a lot of different situations regardless of operational mode at any time, but when the situation is regarded as normal, the operation is not constrained by it. Thus, situations will only be of importance when they constrain the vessel’s operations.
2.13 Ship condition
The vessel’s own condition is important for its overall situation. It ranges from being fully operational, via being degraded in various ways, to being completely inoperable.
2.14 Ship operation
A vessel will perform various operations in order to fulfil its purpose. These overall operations can further be divided into specialized functions. The operations can also be put into various
FLAGSHIP
D-B4.3 2010-02-16
12 of 43
operational groups, for instance operations pertaining to the ship itself, operations pertaining to what the ship carries, operations at sea, operations related to the voyage, navigation etc. The ship operations defined in this document are defined for convenience and understanding, and other definitions might be found just as convenient.
2.15 Voyage phase
In the literature, the term voyage phase is used to denote the various phases a vessel goes through from the voyage is being planned until the destination is reached, regarding its overall voyage from port to port via coastal waters and open sea. It is not immediately related to the operations needed to be carried during any of the phases. Here, the voyage phases are combined with ship operations to define operational states.
FLAGSHIP
D-B4.3 2010-02-16
13 of 43
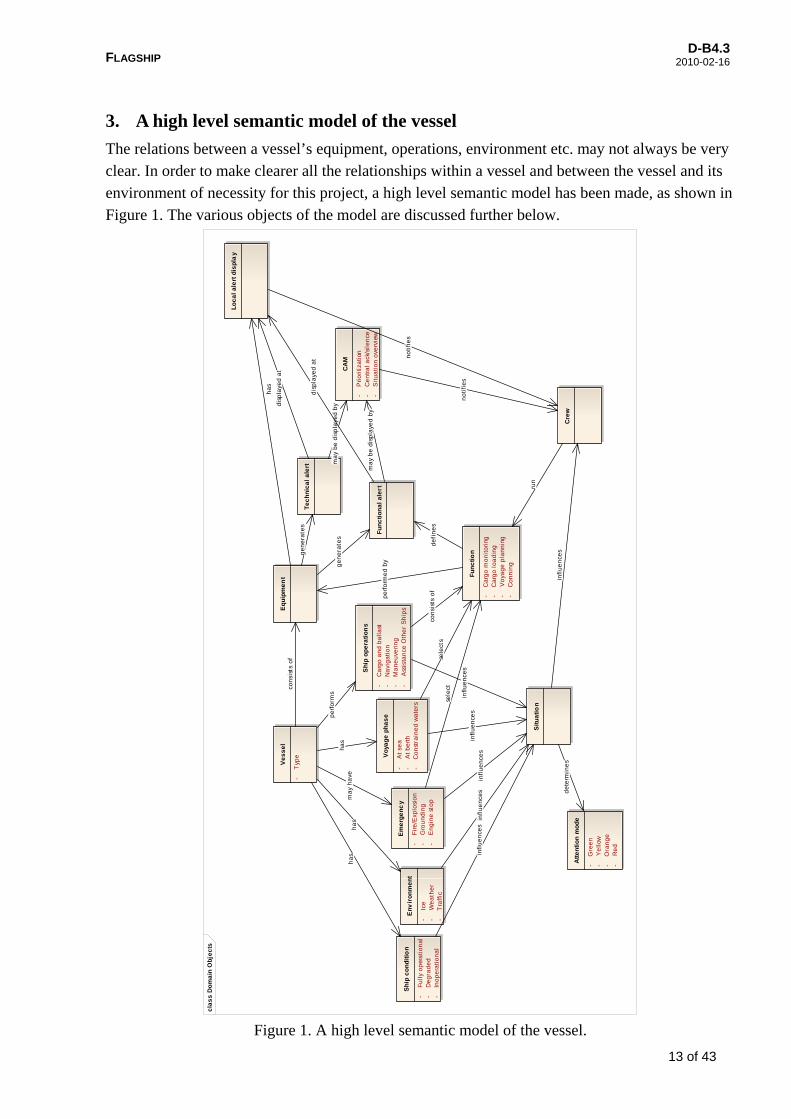
3. A high level semantic model of the vessel
The relations between a vessel’s equipment, operations, environment etc. may not always be very clear. In order to make clearer all the relationships within a vessel and between the vessel and its environment of necessity for this project, a high level semantic model has been made, as shown in Figure 1. The various objects of the model are discussed further below.
Figure 1. A high level semantic model of the vessel.
cla
ss
Do
ma
in O
bje
cts
Vo
yag
e p
ha
se
- A
t se
a-
At
be
rth
- C
on
stra
ine
d w
ate
rs
Sh
ip o
pe
rati
on
s
- C
arg
o a
nd
ba
lla
st-
Na
vig
ati
on
- M
an
eu
veri
ng
- A
ssis
tan
ce O
the
r S
hip
sEq
uip
me
nt F
un
cti
on
- C
arg
o m
on
ito
ring
- C
arg
o l
oa
din
g-
Vo
yag
e p
lan
nin
g-
Co
nn
ing
En
vir
on
me
nt
- Ic
e-
We
ath
er
- T
raff
ic
Att
en
tio
n m
od
e
- G
ree
n-
Ye
llow
- O
ran
ge
- R
ed
Sh
ip c
on
dit
ion
- F
ull
y o
per
ati
on
al-
De
gra
de
d-
Ino
pe
rati
on
al
Te
ch
nic
al
ale
rt
Ve
ss
el
- T
ype
Fu
nc
tio
na
l a
lert
CA
M
- P
rio
ritiz
ati
on-
Ce
ntr
al
ack
/sil
en
ce-
Sit
ua
tio
n o
verv
iew
Lo
ca
l a
lert
dis
pla
y
Em
erg
en
cy
- F
ire
/Exp
losi
on
- G
rou
nd
ing
- E
ng
ine
sto
p
Cre
w
Sit
ua
tio
n
con
sist
s o
f
ha
s
pe
rfo
rms
con
sist
s o
f
ge
ne
rate
s
ge
ne
rate
s
de
fin
es
ha
s infl
ue
nce
sin
flu
en
ces
infl
ue
nce
s
ha
s infl
ue
nce
s
ma
y b
e d
isp
laye
d b
y
ma
y b
e d
isp
laye
d b
y
ha
s
dis
pla
yed
at
dis
pla
yed
at
sele
cts
ma
y h
ave infl
ue
nce
s
sele
ct
pe
rfo
rme
d b
y
infl
ue
nce
s
run
no
tifi
es
no
tifi
es
de
term
ine
s
FLAGSHIP
D-B4.3 2010-02-16
14 of 43
3.1 Ship condition
A vessel is in a certain condition that affects its overall situation. The conditions might be: Fully operational, degraded in different degrees while still operational, and in-operational. There might be more conditions to identify, but for the sake of simplicity, we have defined these clearly different conditions. The overall situation affects the crew attention, and it is easy to imagine how certain types of equipment, operations and functions are dependent on the vessel’s condition and even may have to be shut down in degraded condition. However, we have not developed the relation between ship condition and CAM here as we don’t think there is a direct link between them. There will, however, be operational constraints, see ch. 4.4. Whether these operational constraints will directly influence the CAM remains to be seen, but they affect the functions performed on board. Degradation may lead to alert flooding.
3.2 Environment
A vessel is situated in a complex environment, where tidal water, ice, weather, traffic, interactions with other vessels etc. influences the overall situation of the ship. Usually, these environmental situations shall always be taken care of on board of the vessel. The overall vessel situation and the attention of the crew are heavily affected by the environment, and it will of course both affect the usual operations and functions, and may prompt new operations. Constraining situations in the environment can be seen as operational constraints, see ch. 4.4. How the environment affects the CAM remains to be seen, but they affect the functions performed on board. Heavy operational constraints may lead to alert flooding.
3.3 Emergency
A vessel may experience emergencies of various degrees of seriousness both on board of own vessel or in the vicinity, at neighbouring vessels etc. This will affect the ship operations and the overall situation of the ship, and especially the attention of the crew, who may not be able to carry out usual duties. Emergencies may lead to the performance of certain operations while other operations may have to be shut down or restricted. Whether emergencies will directly influence the CAM remains to be seen, but they affect the functions performed on board. An emergency can be seen as an operational constraint, see ch. 4.4. Emergencies may lead to alert flooding.
3.4 Voyage phase
A vessel will on its way from port to port above the seven seas be in one of many defined voyage phases, see ch. 4.1 and 4.2. Some would call the voyage phases operational states of the ship, but here we will rather see the voyage phases isolated from the operations going on. Thus, we have tried to identify our own set within the project, mostly for the sake of convenience, and we are open to diversify the set further. The voyage phase will affect the vessel’s situation and ship operations, and some operations and functions are directly related to one or a few specific voyage phases. The attention at the CAM ought to be related to the voyage phases, and it is indirectly, through the functions that are carried out.
FLAGSHIP
D-B4.3 2010-02-16
15 of 43
3.5 Ship operations
A vessel will perform a lot of various operations in order to fulfil its purpose. Ship operations are defined by various bodies, and may thus differ in the literature. We have in this project tried to define broad general categories of these operations, see ch. 4.7, and have broken them down further into (sub-)functions. Our definitions have been made for convenience, but have been found to give a good understanding of the vessels’ many operations. A ship operation is thus an overall term for a group of operations/functions that have to be carried out in order to fulfil a certain conceptual operation, for instance cargo handling, passenger handling, engine maintenance etc.
3.6 Functions
A vessel’s ship operations may as stated above be further broken down into more separate (sub-) functions to make clear all the more or less independent functions going on on board the vessel. These functions have been defined in various ways by various bodies. We have in this project tried to make a comprehensive list of separate functions within each ship operation, see ch. 4.8. Functions will produce functional alerts which have to be communicated to some local alert display and to the CAM. Functions may also produce technical alerts, but these should as far as possible not be communicated to the CAM.
3.7 Equipment
A vessel contains a shipload of various equipment in order to carry out all its necessary operations and functions. See ch. 4.9 for a comprehensive overview of ship equipment related to operations and functions. The equipment produces functional and technical alerts which have to be communicated to some local alert display and to the CAM.
3.8 Situation
A vessel’s situation is strongly connected to its condition, its environment, and voyage phase. If an emergency arises, it will of course also alter the overall situation and attention on board. Further, the operations carried out on board the vessel will influence the situation and through this the attention mode. The crew must respond immediately to any change in the vessel’s situation.
3.9 Attention mode
A vessel’s situation will lead to differences in how its operations and functions are adhered to. Under normal circumstances the attention might be in a ‘normal’ state and require normal manning. Any changes in the vessel’s situation with regards to ship operations, obstacles, emergencies, etc. may lead to heightened awareness at the bridge etc., and thus the attention mode is changed. This may be of importance for the CAM with regards to filtering of alert messages. See ch. 4.5 for a proposed set of attention modes and ch. 4.6 for how attention modes may be coupled to the voyage phases and in case of emergency.
3.10 Crew
A vessel will carry a crew whose work and attention are directly influenced by the vessel’s situation and the functions that are to be carried out. The crew shall also read and acknowledge
FLAGSHIP
D-B4.3 2010-02-16
16 of 43
the alerts that are produced by functions and equipment, on both local alert stations and on a CAM, and execute the necessary actions following these alerts.
3.11 Functional alert
The various functions will produce functional alerts that have to be presented, both on some local alert display and on a CAM. If some functions present mostly technical alerts, work should be carried out by the manufacturer in order to secure that these are replaced by functional alerts.
3.12 Technical alert
The equipment will produce both functional alerts and some alerts directly related to the equipment; technical alerts. These will have to be presented, both on some local alert display and on a CAM. Technical alerts should as far as possible not be presented at the CAM. The functions should be required to translate technical alerts into functional alerts before presenting these to the CAM.
3.13 Local alert display
Any equipment may have one or more local alert displays where alerts are shown and acknowledged.
3.14 CAM
The centralized alert management (CAM) is a function that has its own operator station where alerts from all kinds of equipment are collected and presented. Which alerts and how they are presented are subjects to further discussion in further deliverables. As far as possible, there should be clear requirements about which alerts should be delivered and in which form they should be presented. It is also important that technical alerts are kept to a minimum, in order to avoid confusing technical details at the CAM, and also in order to minimize alert flooding.
FLAGSHIP
D-B4.3 2010-02-16
17 of 43
4. Ship operational states
4.1 Introduction and background
Ship operational states as used in this document means a number of operational ‘modes’ that have impact on manning and functions to be performed. This is an important aspect for instance in conjunction with the implementation of the ISM code.
In the Flagship project description the term ‘modes of operation’ was used in order to describe the various operational states on board on a vessel. It seems that ‘mode’ is a term that has many different meanings in the literature, and thus we have tried to avoid using the term, except as an overall term for everything that is going on on board.
This section will discuss some different types of modes, operational states, situations, operations and related equipment. It has all been used to construct a general ship operations / functions / equipment list presented at the end of the section.
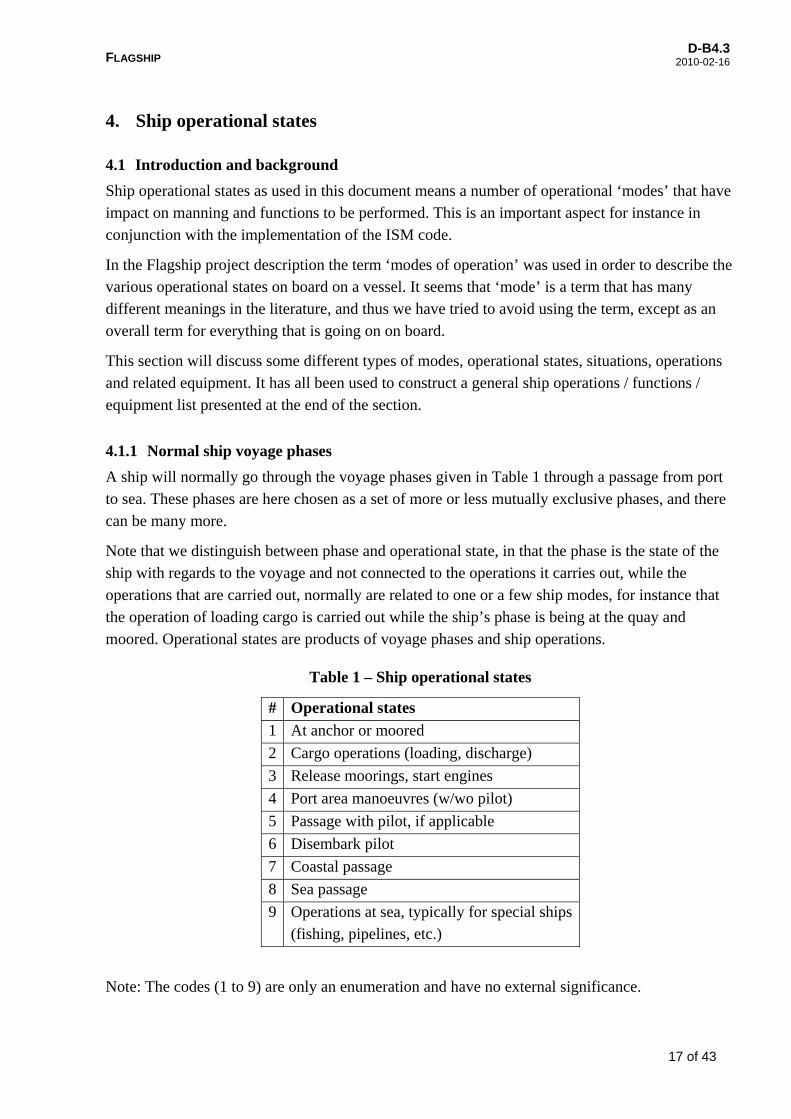
4.1.1 Normal ship voyage phases
A ship will normally go through the voyage phases given in Table 1 through a passage from port to sea. These phases are here chosen as a set of more or less mutually exclusive phases, and there can be many more.
Note that we distinguish between phase and operational state, in that the phase is the state of the ship with regards to the voyage and not connected to the operations it carries out, while the operations that are carried out, normally are related to one or a few ship modes, for instance that the operation of loading cargo is carried out while the ship’s phase is being at the quay and moored. Operational states are products of voyage phases and ship operations.
Table 1 – Ship operational states
# Operational states
1 At anchor or moored
2 Cargo operations (loading, discharge)
3 Release moorings, start engines
4 Port area manoeuvres (w/wo pilot)
5 Passage with pilot, if applicable
6 Disembark pilot
7 Coastal passage
8 Sea passage
9 Operations at sea, typically for special ships (fishing, pipelines, etc.)
Note: The codes (1 to 9) are only an enumeration and have no external significance.
FLAGSHIP
D-B4.3 2010-02-16
18 of 43
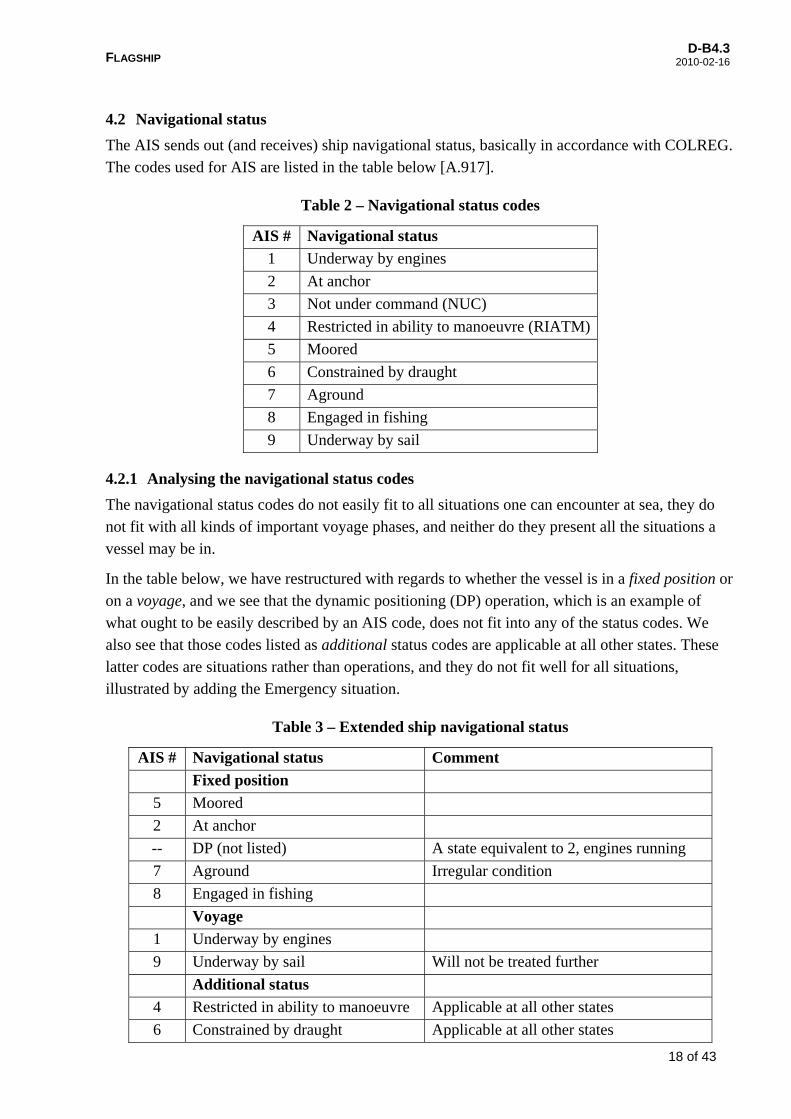
4.2 Navigational status
The AIS sends out (and receives) ship navigational status, basically in accordance with COLREG. The codes used for AIS are listed in the table below [A.917].
Table 2 – Navigational status codes
AIS # Navigational status
1 Underway by engines
2 At anchor
3 Not under command (NUC)
4 Restricted in ability to manoeuvre (RIATM)
5 Moored
6 Constrained by draught
7 Aground
8 Engaged in fishing
9 Underway by sail
4.2.1 Analysing the navigational status codes
The navigational status codes do not easily fit to all situations one can encounter at sea, they do not fit with all kinds of important voyage phases, and neither do they present all the situations a vessel may be in.
In the table below, we have restructured with regards to whether the vessel is in a fixed position or on a voyage, and we see that the dynamic positioning (DP) operation, which is an example of what ought to be easily described by an AIS code, does not fit into any of the status codes. We also see that those codes listed as additional status codes are applicable at all other states. These latter codes are situations rather than operations, and they do not fit well for all situations, illustrated by adding the Emergency situation.
Table 3 – Extended ship navigational status
AIS # Navigational status Comment
Fixed position
5 Moored
2 At anchor
-- DP (not listed) A state equivalent to 2, engines running
7 Aground Irregular condition
8 Engaged in fishing
Voyage
1 Underway by engines
9 Underway by sail Will not be treated further
Additional status
4 Restricted in ability to manoeuvre Applicable at all other states
6 Constrained by draught Applicable at all other states
FLAGSHIP
D-B4.3 2010-02-16
19 of 43
3 Not under command Applicable at all other states
-- Emergency Applicable at all other states
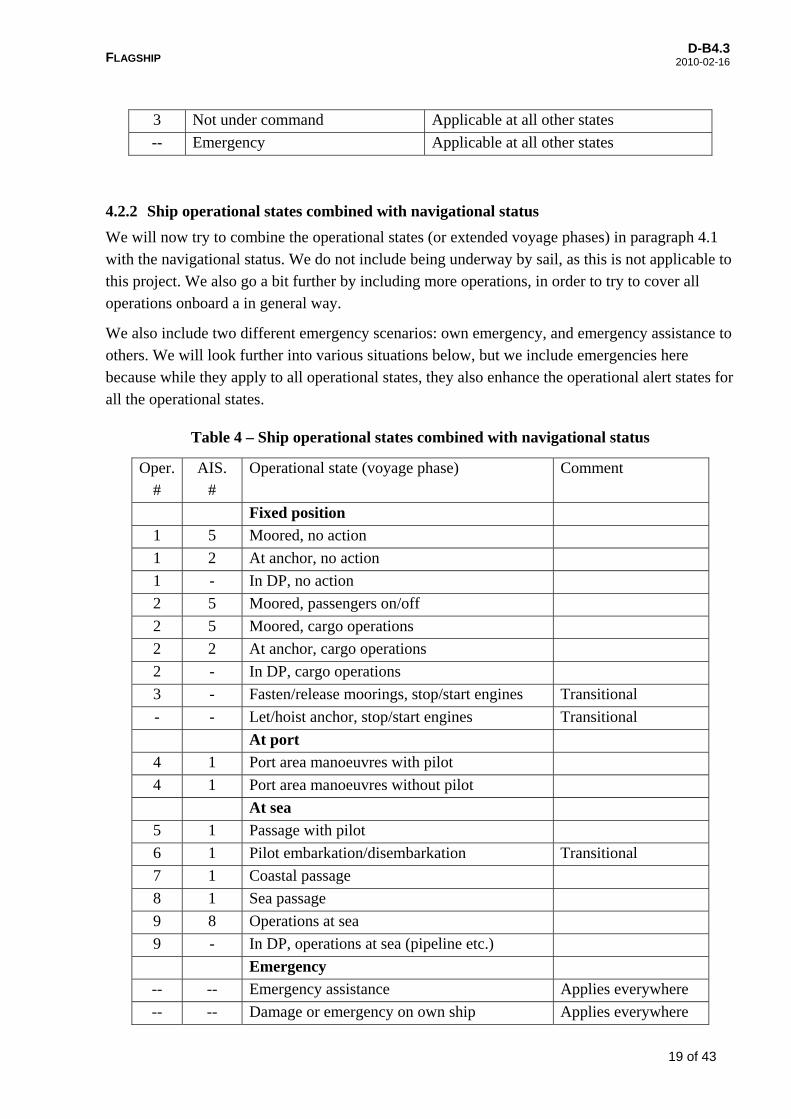
4.2.2 Ship operational states combined with navigational status
We will now try to combine the operational states (or extended voyage phases) in paragraph 4.1 with the navigational status. We do not include being underway by sail, as this is not applicable to this project. We also go a bit further by including more operations, in order to try to cover all operations onboard a in general way.
We also include two different emergency scenarios: own emergency, and emergency assistance to others. We will look further into various situations below, but we include emergencies here because while they apply to all operational states, they also enhance the operational alert states for all the operational states.
Table 4 – Ship operational states combined with navigational status
Oper. #
AIS. #
Operational state (voyage phase) Comment
Fixed position
1 5 Moored, no action
1 2 At anchor, no action
1 - In DP, no action
2 5 Moored, passengers on/off
2 5 Moored, cargo operations
2 2 At anchor, cargo operations
2 - In DP, cargo operations
3 - Fasten/release moorings, stop/start engines Transitional
- - Let/hoist anchor, stop/start engines Transitional
At port
4 1 Port area manoeuvres with pilot
4 1 Port area manoeuvres without pilot
At sea
5 1 Passage with pilot
6 1 Pilot embarkation/disembarkation Transitional
7 1 Coastal passage
8 1 Sea passage
9 8 Operations at sea
9 - In DP, operations at sea (pipeline etc.)
Emergency
-- -- Emergency assistance Applies everywhere
-- -- Damage or emergency on own ship Applies everywhere
FLAGSHIP
D-B4.3 2010-02-16
20 of 43
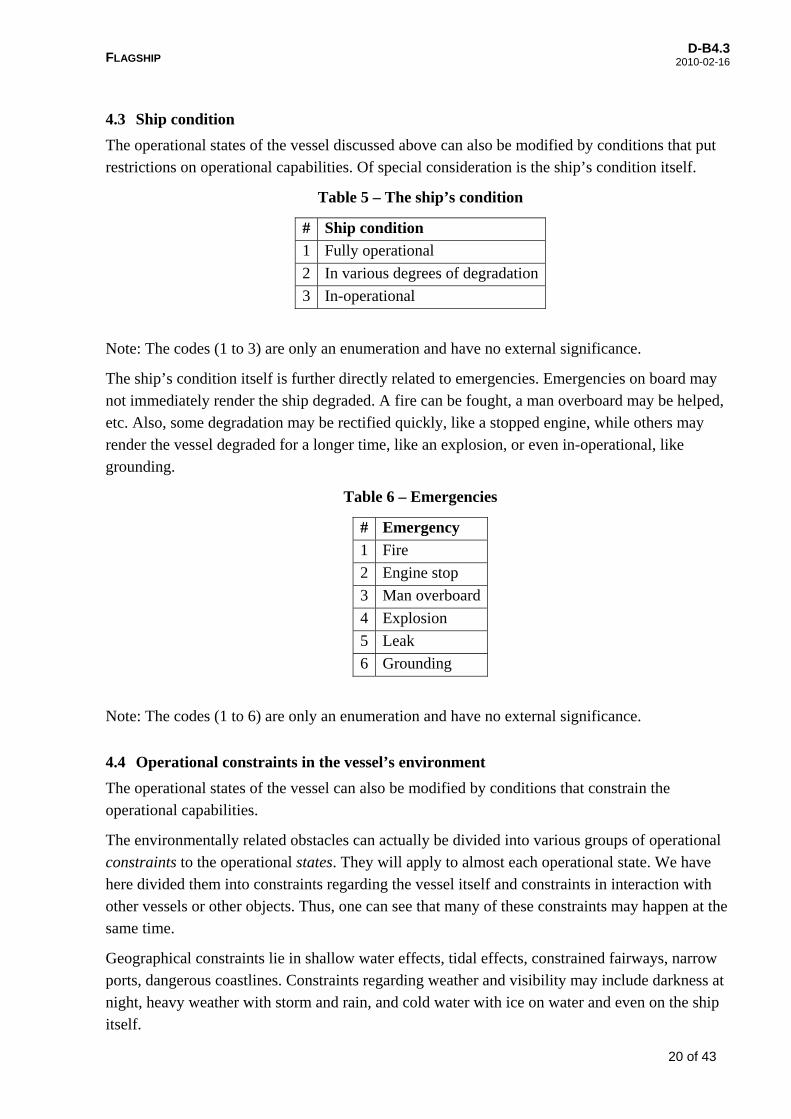
4.3 Ship condition
The operational states of the vessel discussed above can also be modified by conditions that put restrictions on operational capabilities. Of special consideration is the ship’s condition itself.
Table 5 – The ship’s condition
# Ship condition
1 Fully operational
2 In various degrees of degradation
3 In-operational
Note: The codes (1 to 3) are only an enumeration and have no external significance.
The ship’s condition itself is further directly related to emergencies. Emergencies on board may not immediately render the ship degraded. A fire can be fought, a man overboard may be helped, etc. Also, some degradation may be rectified quickly, like a stopped engine, while others may render the vessel degraded for a longer time, like an explosion, or even in-operational, like grounding.
Table 6 – Emergencies
# Emergency
1 Fire
2 Engine stop
3 Man overboard
4 Explosion
5 Leak
6 Grounding
Note: The codes (1 to 6) are only an enumeration and have no external significance.
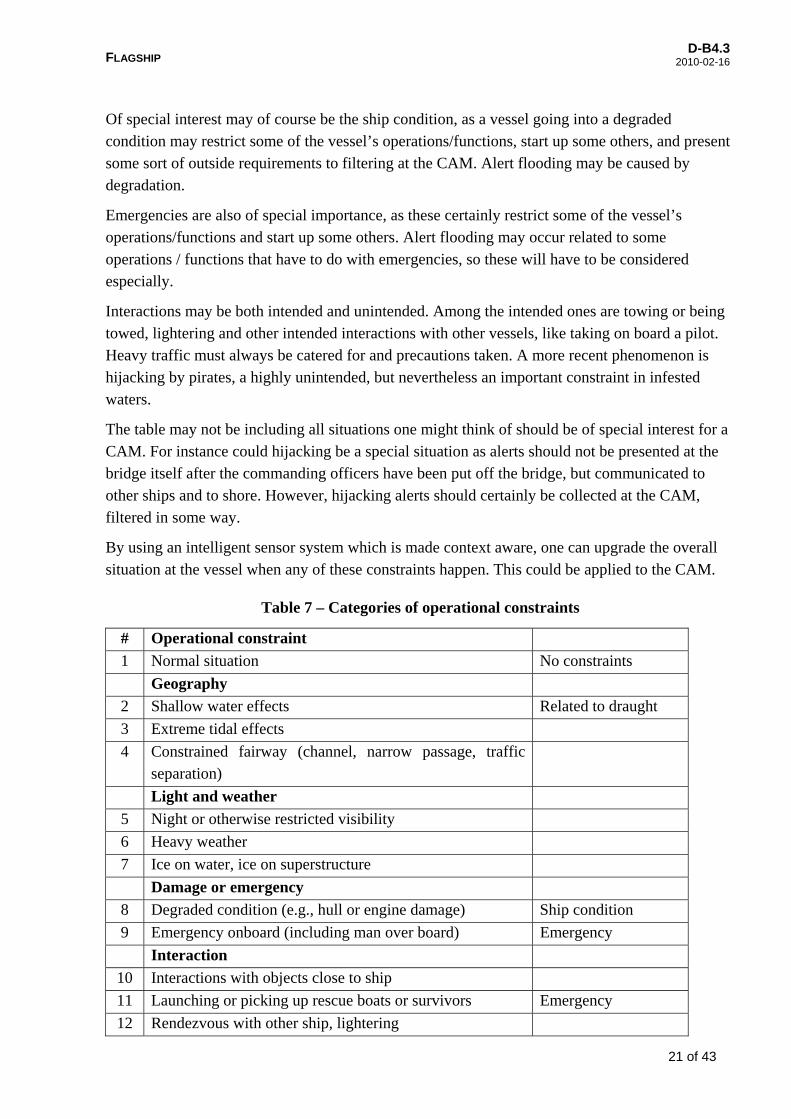
4.4 Operational constraints in the vessel’s environment
The operational states of the vessel can also be modified by conditions that constrain the operational capabilities.
The environmentally related obstacles can actually be divided into various groups of operational constraints to the operational states. They will apply to almost each operational state. We have here divided them into constraints regarding the vessel itself and constraints in interaction with other vessels or other objects. Thus, one can see that many of these constraints may happen at the same time.
Geographical constraints lie in shallow water effects, tidal effects, constrained fairways, narrow ports, dangerous coastlines. Constraints regarding weather and visibility may include darkness at night, heavy weather with storm and rain, and cold water with ice on water and even on the ship itself.
FLAGSHIP
D-B4.3 2010-02-16
21 of 43
Of special interest may of course be the ship condition, as a vessel going into a degraded condition may restrict some of the vessel’s operations/functions, start up some others, and present some sort of outside requirements to filtering at the CAM. Alert flooding may be caused by degradation.
Emergencies are also of special importance, as these certainly restrict some of the vessel’s operations/functions and start up some others. Alert flooding may occur related to some operations / functions that have to do with emergencies, so these will have to be considered especially.
Interactions may be both intended and unintended. Among the intended ones are towing or being towed, lightering and other intended interactions with other vessels, like taking on board a pilot. Heavy traffic must always be catered for and precautions taken. A more recent phenomenon is hijacking by pirates, a highly unintended, but nevertheless an important constraint in infested waters.
The table may not be including all situations one might think of should be of special interest for a CAM. For instance could hijacking be a special situation as alerts should not be presented at the bridge itself after the commanding officers have been put off the bridge, but communicated to other ships and to shore. However, hijacking alerts should certainly be collected at the CAM, filtered in some way.
By using an intelligent sensor system which is made context aware, one can upgrade the overall situation at the vessel when any of these constraints happen. This could be applied to the CAM.
Table 7 – Categories of operational constraints
# Operational constraint
1 Normal situation No constraints
Geography
2 Shallow water effects Related to draught
3 Extreme tidal effects
4 Constrained fairway (channel, narrow passage, traffic separation)
Light and weather
5 Night or otherwise restricted visibility
6 Heavy weather
7 Ice on water, ice on superstructure
Damage or emergency
8 Degraded condition (e.g., hull or engine damage) Ship condition
9 Emergency onboard (including man over board) Emergency
Interaction
10 Interactions with objects close to ship
11 Launching or picking up rescue boats or survivors Emergency
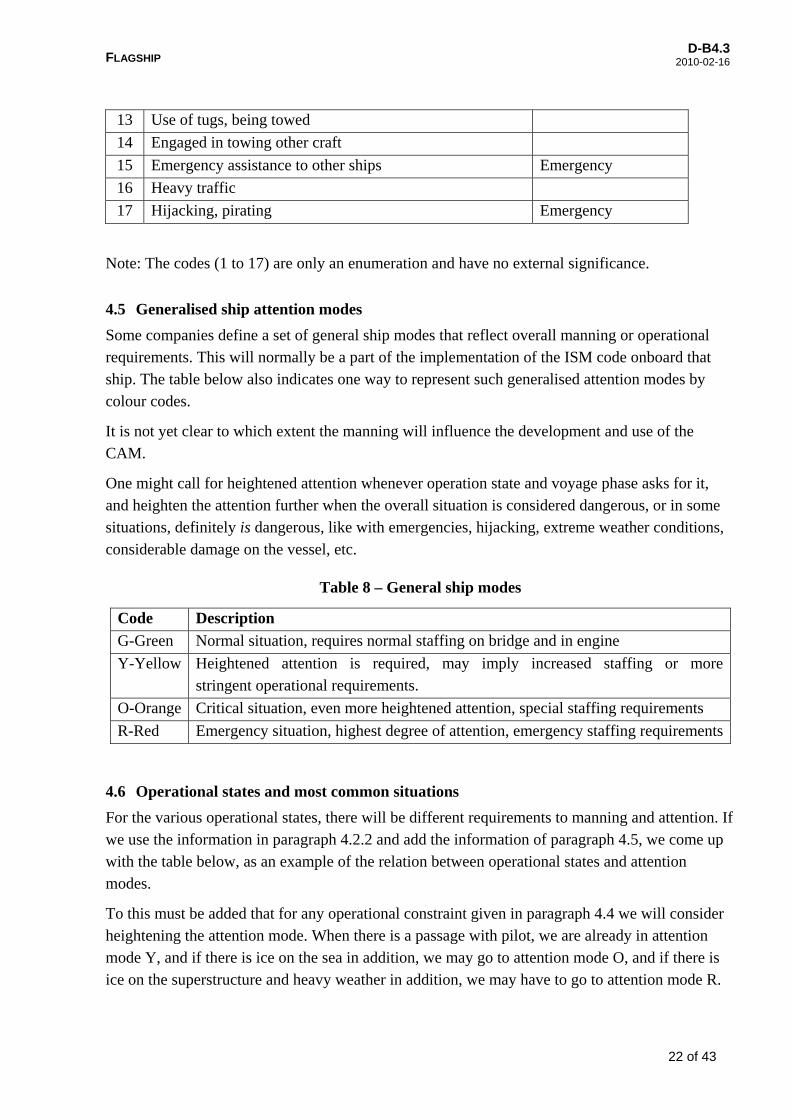
12 Rendezvous with other ship, lightering
FLAGSHIP
D-B4.3 2010-02-16
22 of 43
13 Use of tugs, being towed
14 Engaged in towing other craft
15 Emergency assistance to other ships Emergency
16 Heavy traffic
17 Hijacking, pirating Emergency
Note: The codes (1 to 17) are only an enumeration and have no external significance.
4.5 Generalised ship attention modes
Some companies define a set of general ship modes that reflect overall manning or operational requirements. This will normally be a part of the implementation of the ISM code onboard that ship. The table below also indicates one way to represent such generalised attention modes by colour codes.
It is not yet clear to which extent the manning will influence the development and use of the CAM.
One might call for heightened attention whenever operation state and voyage phase asks for it, and heighten the attention further when the overall situation is considered dangerous, or in some situations, definitely is dangerous, like with emergencies, hijacking, extreme weather conditions, considerable damage on the vessel, etc.
Table 8 – General ship modes
Code Description
G-Green Normal situation, requires normal staffing on bridge and in engine
Y-Yellow Heightened attention is required, may imply increased staffing or morestringent operational requirements.
O-Orange Critical situation, even more heightened attention, special staffing requirements
R-Red Emergency situation, highest degree of attention, emergency staffing requirements
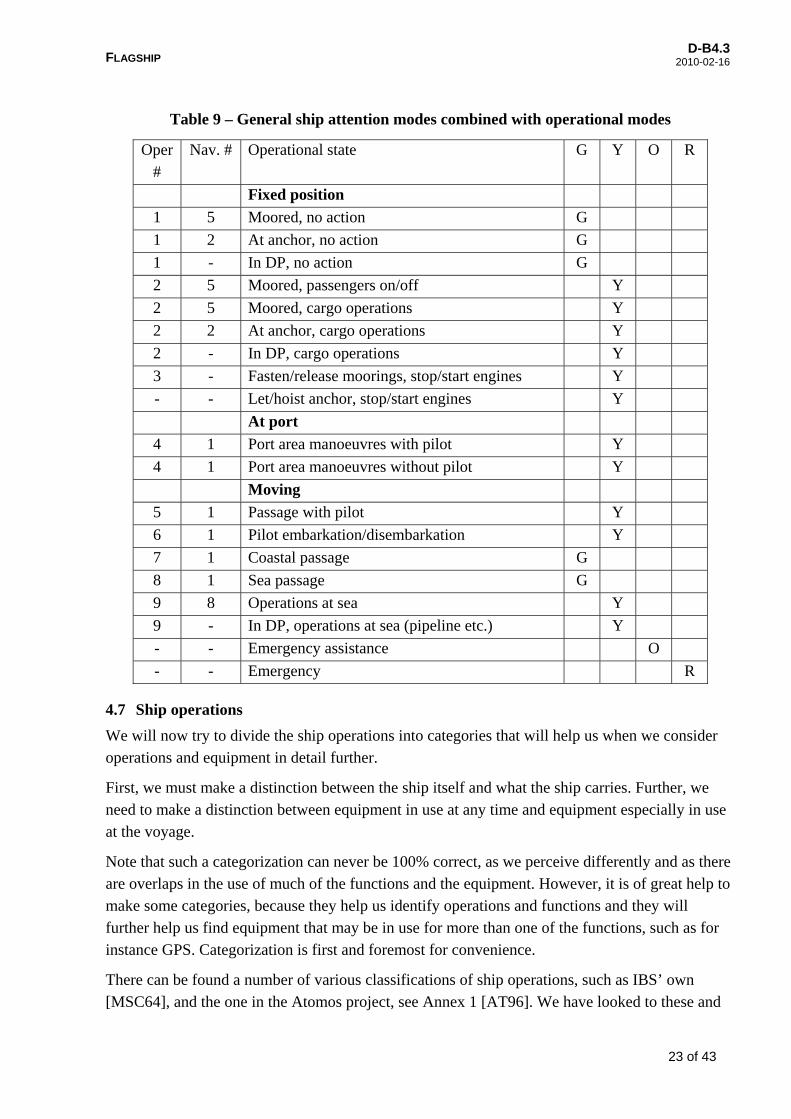
4.6 Operational states and most common situations
For the various operational states, there will be different requirements to manning and attention. If we use the information in paragraph 4.2.2 and add the information of paragraph 4.5, we come up with the table below, as an example of the relation between operational states and attention modes.
To this must be added that for any operational constraint given in paragraph 4.4 we will consider heightening the attention mode. When there is a passage with pilot, we are already in attention mode Y, and if there is ice on the sea in addition, we may go to attention mode O, and if there is ice on the superstructure and heavy weather in addition, we may have to go to attention mode R.
FLAGSHIP
D-B4.3 2010-02-16
23 of 43
Table 9 – General ship attention modes combined with operational modes
Oper #
Nav. # Operational state G Y O R
Fixed position
1 5 Moored, no action G
1 2 At anchor, no action G
1 - In DP, no action G
2 5 Moored, passengers on/off Y
2 5 Moored, cargo operations Y
2 2 At anchor, cargo operations Y
2 - In DP, cargo operations Y
3 - Fasten/release moorings, stop/start engines Y
- - Let/hoist anchor, stop/start engines Y
At port
4 1 Port area manoeuvres with pilot Y
4 1 Port area manoeuvres without pilot Y
Moving
5 1 Passage with pilot Y
6 1 Pilot embarkation/disembarkation Y
7 1 Coastal passage G
8 1 Sea passage G
9 8 Operations at sea Y
9 - In DP, operations at sea (pipeline etc.) Y
- - Emergency assistance O
- - Emergency R
4.7 Ship operations
We will now try to divide the ship operations into categories that will help us when we consider operations and equipment in detail further.
First, we must make a distinction between the ship itself and what the ship carries. Further, we need to make a distinction between equipment in use at any time and equipment especially in use at the voyage.
Note that such a categorization can never be 100% correct, as we perceive differently and as there are overlaps in the use of much of the functions and the equipment. However, it is of great help to make some categories, because they help us identify operations and functions and they will further help us find equipment that may be in use for more than one of the functions, such as for instance GPS. Categorization is first and foremost for convenience.
There can be found a number of various classifications of ship operations, such as IBS’ own [MSC64], and the one in the Atomos project, see Annex 1 [AT96]. We have looked to these and
FLAGSHIP
D-B4.3 2010-02-16
24 of 43
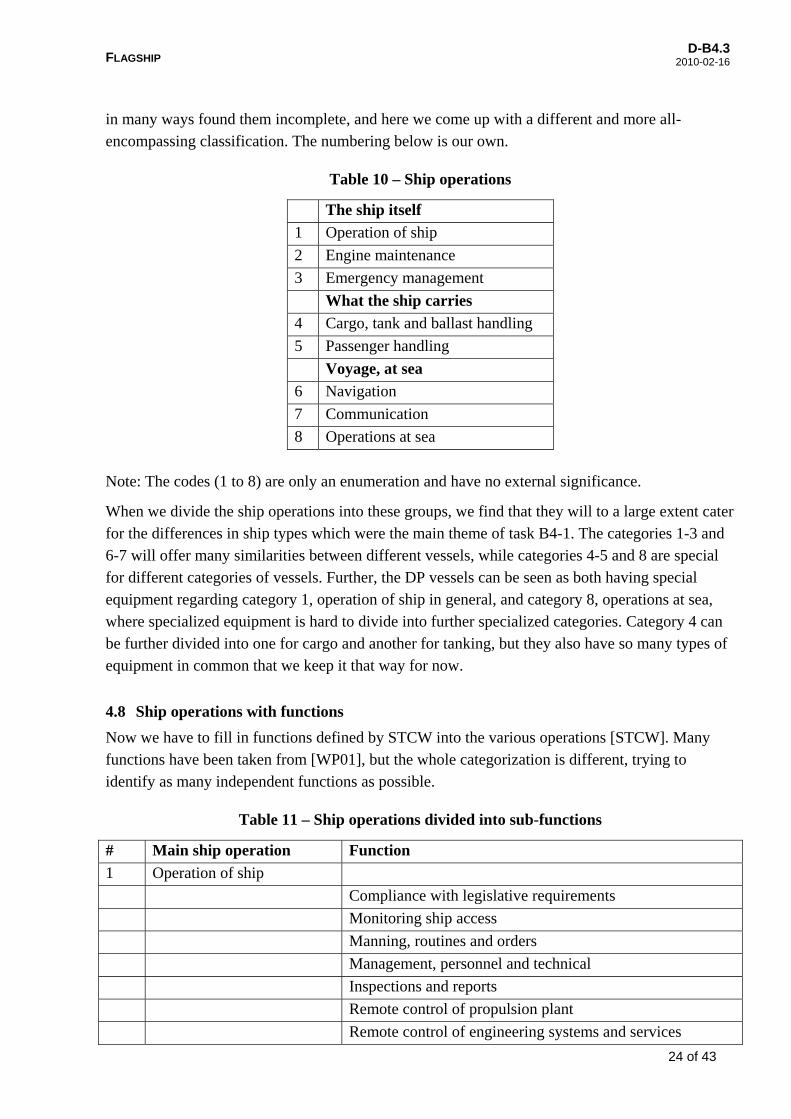
in many ways found them incomplete, and here we come up with a different and more all-encompassing classification. The numbering below is our own.
Table 10 – Ship operations
The ship itself
1 Operation of ship
2 Engine maintenance
3 Emergency management
What the ship carries
4 Cargo, tank and ballast handling
5 Passenger handling
Voyage, at sea
6 Navigation
7 Communication
8 Operations at sea
Note: The codes (1 to 8) are only an enumeration and have no external significance.
When we divide the ship operations into these groups, we find that they will to a large extent cater for the differences in ship types which were the main theme of task B4-1. The categories 1-3 and 6-7 will offer many similarities between different vessels, while categories 4-5 and 8 are special for different categories of vessels. Further, the DP vessels can be seen as both having special equipment regarding category 1, operation of ship in general, and category 8, operations at sea, where specialized equipment is hard to divide into further specialized categories. Category 4 can be further divided into one for cargo and another for tanking, but they also have so many types of equipment in common that we keep it that way for now.
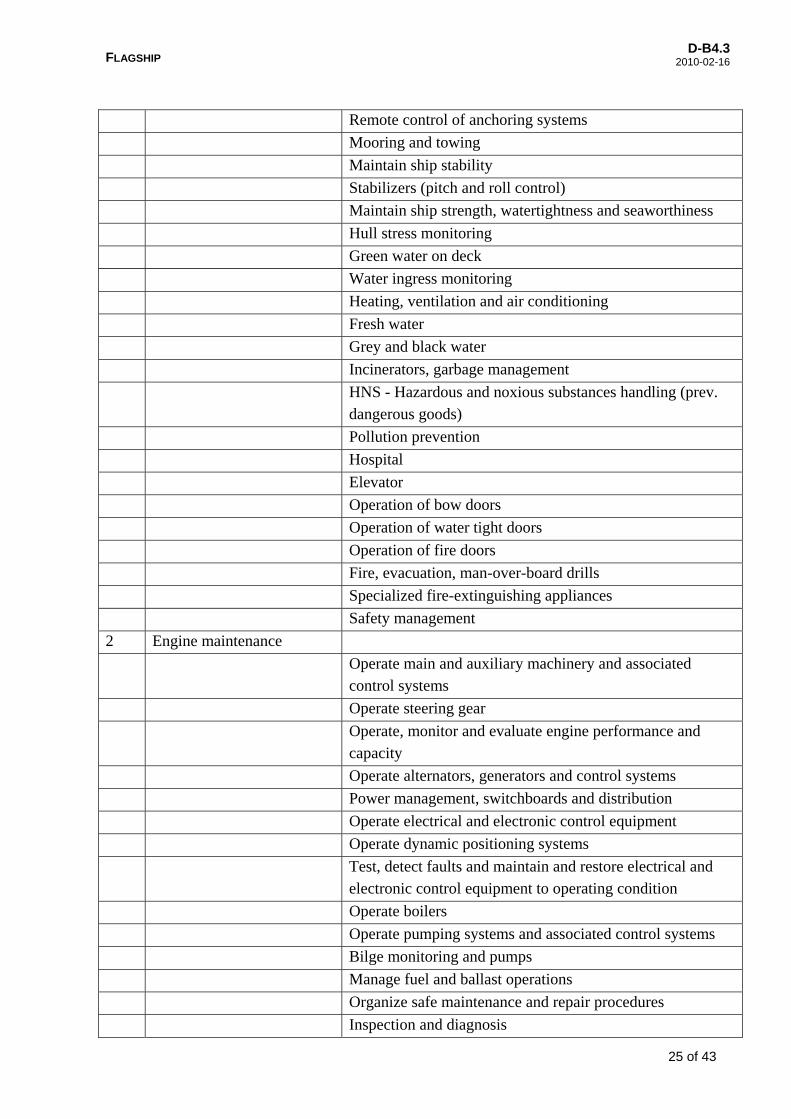
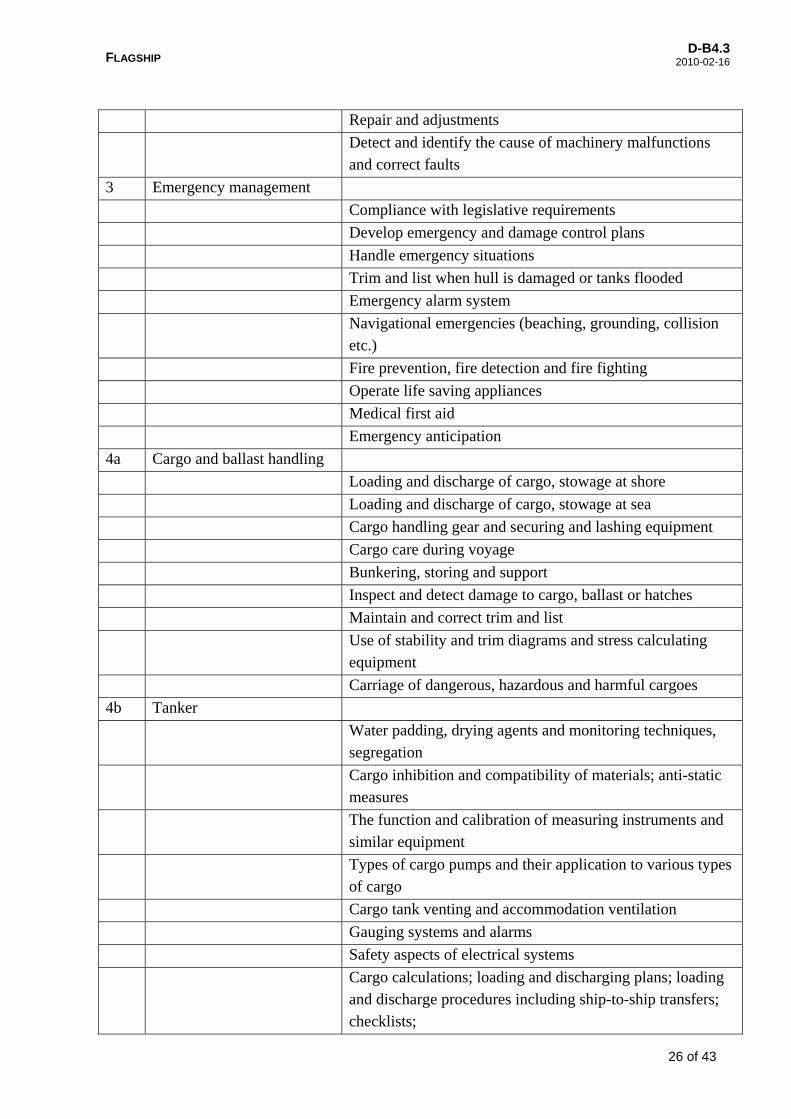
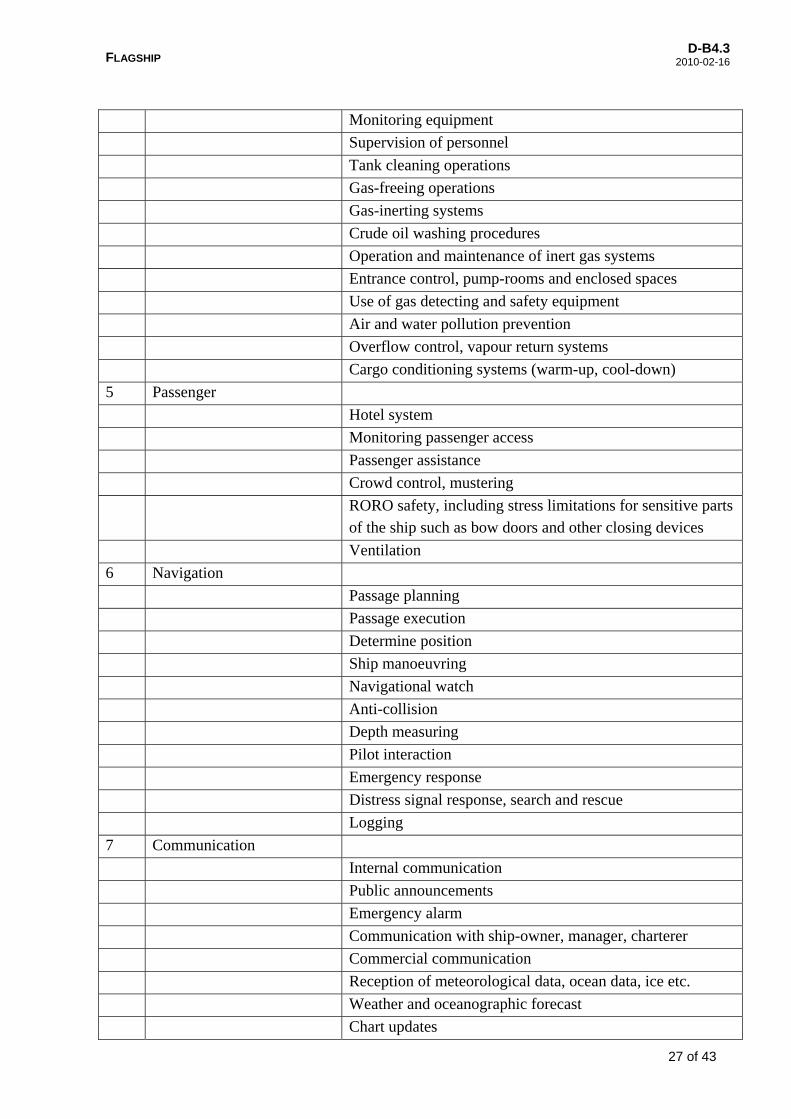
4.8 Ship operations with functions
Now we have to fill in functions defined by STCW into the various operations [STCW]. Many functions have been taken from [WP01], but the whole categorization is different, trying to identify as many independent functions as possible.
Table 11 – Ship operations divided into sub-functions
# Main ship operation Function
1 Operation of ship
Compliance with legislative requirements
Monitoring ship access
Manning, routines and orders
Management, personnel and technical
Inspections and reports
Remote control of propulsion plant
Remote control of engineering systems and services
FLAGSHIP
D-B4.3 2010-02-16
25 of 43
Remote control of anchoring systems
Mooring and towing
Maintain ship stability
Stabilizers (pitch and roll control)
Maintain ship strength, watertightness and seaworthiness
Hull stress monitoring
Green water on deck
Water ingress monitoring
Heating, ventilation and air conditioning
Fresh water
Grey and black water
Incinerators, garbage management
HNS - Hazardous and noxious substances handling (prev. dangerous goods)
Pollution prevention
Hospital
Elevator
Operation of bow doors
Operation of water tight doors
Operation of fire doors
Fire, evacuation, man-over-board drills
Specialized fire-extinguishing appliances
Safety management
2 Engine maintenance
Operate main and auxiliary machinery and associated control systems
Operate steering gear
Operate, monitor and evaluate engine performance and capacity
Operate alternators, generators and control systems
Power management, switchboards and distribution
Operate electrical and electronic control equipment
Operate dynamic positioning systems
Test, detect faults and maintain and restore electrical and electronic control equipment to operating condition
Operate boilers
Operate pumping systems and associated control systems
Bilge monitoring and pumps
Manage fuel and ballast operations
Organize safe maintenance and repair procedures
Inspection and diagnosis
FLAGSHIP
D-B4.3 2010-02-16
26 of 43
Repair and adjustments
Detect and identify the cause of machinery malfunctions and correct faults
3 Emergency management
Compliance with legislative requirements
Develop emergency and damage control plans
Handle emergency situations
Trim and list when hull is damaged or tanks flooded
Emergency alarm system
Navigational emergencies (beaching, grounding, collision etc.)
Fire prevention, fire detection and fire fighting
Operate life saving appliances
Medical first aid
Emergency anticipation
4a Cargo and ballast handling
Loading and discharge of cargo, stowage at shore
Loading and discharge of cargo, stowage at sea
Cargo handling gear and securing and lashing equipment
Cargo care during voyage
Bunkering, storing and support
Inspect and detect damage to cargo, ballast or hatches
Maintain and correct trim and list
Use of stability and trim diagrams and stress calculating equipment
Carriage of dangerous, hazardous and harmful cargoes
4b Tanker
Water padding, drying agents and monitoring techniques, segregation
Cargo inhibition and compatibility of materials; anti-static measures
The function and calibration of measuring instruments and similar equipment
Types of cargo pumps and their application to various types of cargo
Cargo tank venting and accommodation ventilation
Gauging systems and alarms
Safety aspects of electrical systems
Cargo calculations; loading and discharging plans; loading and discharge procedures including ship-to-ship transfers; checklists;
FLAGSHIP
D-B4.3 2010-02-16
27 of 43
Monitoring equipment
Supervision of personnel
Tank cleaning operations
Gas-freeing operations
Gas-inerting systems
Crude oil washing procedures
Operation and maintenance of inert gas systems
Entrance control, pump-rooms and enclosed spaces
Use of gas detecting and safety equipment
Air and water pollution prevention
Overflow control, vapour return systems
Cargo conditioning systems (warm-up, cool-down)
5 Passenger
Hotel system
Monitoring passenger access
Passenger assistance
Crowd control, mustering
RORO safety, including stress limitations for sensitive parts of the ship such as bow doors and other closing devices
Ventilation
6 Navigation
Passage planning
Passage execution
Determine position
Ship manoeuvring
Navigational watch
Anti-collision
Depth measuring
Pilot interaction
Emergency response
Distress signal response, search and rescue
Logging
7 Communication
Internal communication
Public announcements
Emergency alarm
Communication with ship-owner, manager, charterer
Commercial communication
Reception of meteorological data, ocean data, ice etc.
Weather and oceanographic forecast
Chart updates
FLAGSHIP
D-B4.3 2010-02-16
28 of 43
Communication with traffic control centre
Communication with ship reporting centres
Ship to ship, ship to shore
Ship to shore communication (restricted)
Distress
Communication with other ships
Transmit / receive information using GMDSS subsystems and equipment
Communication with shore
From ship to shore in case of hijacking etc.
Provide radio services in emergencies
Helicopter communication
8 Sea operations
Various specialized operations
Fishing
Diving
Remotely Operated Vehicles
Pipelining
Lightering (ship to ship transfer)
Offshore activities
Note: The codes (1 to 8) are only an enumeration and have no external significance.
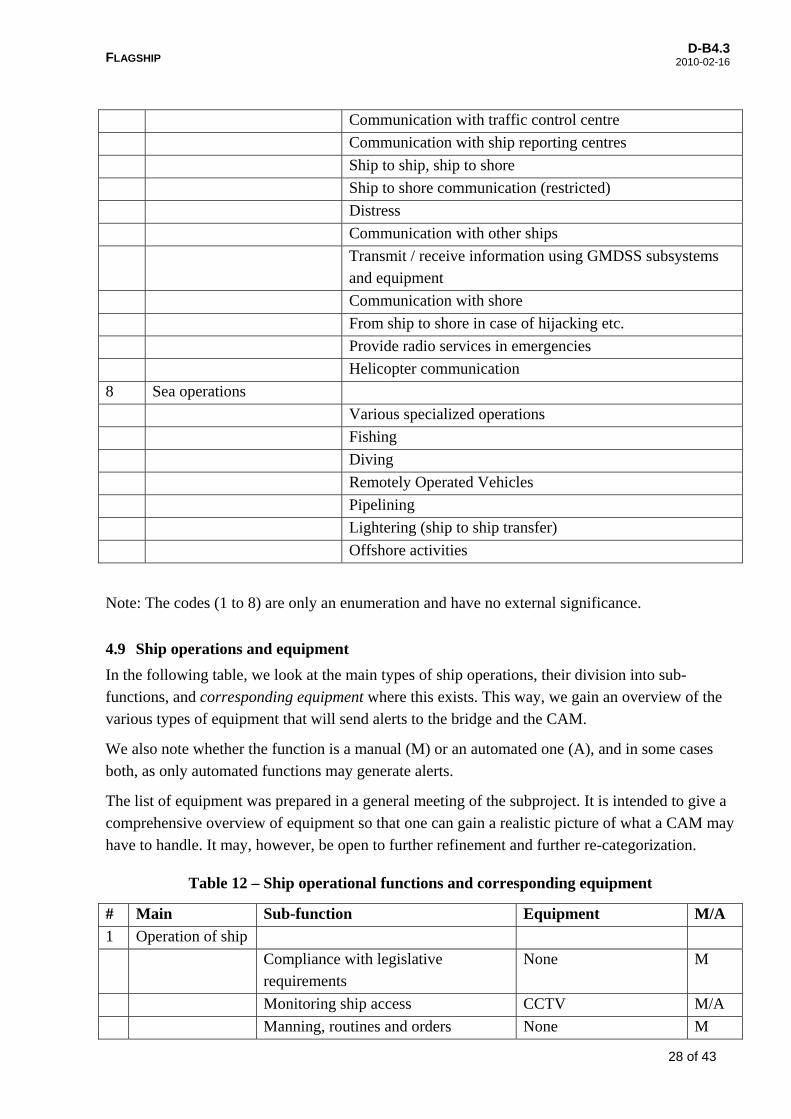
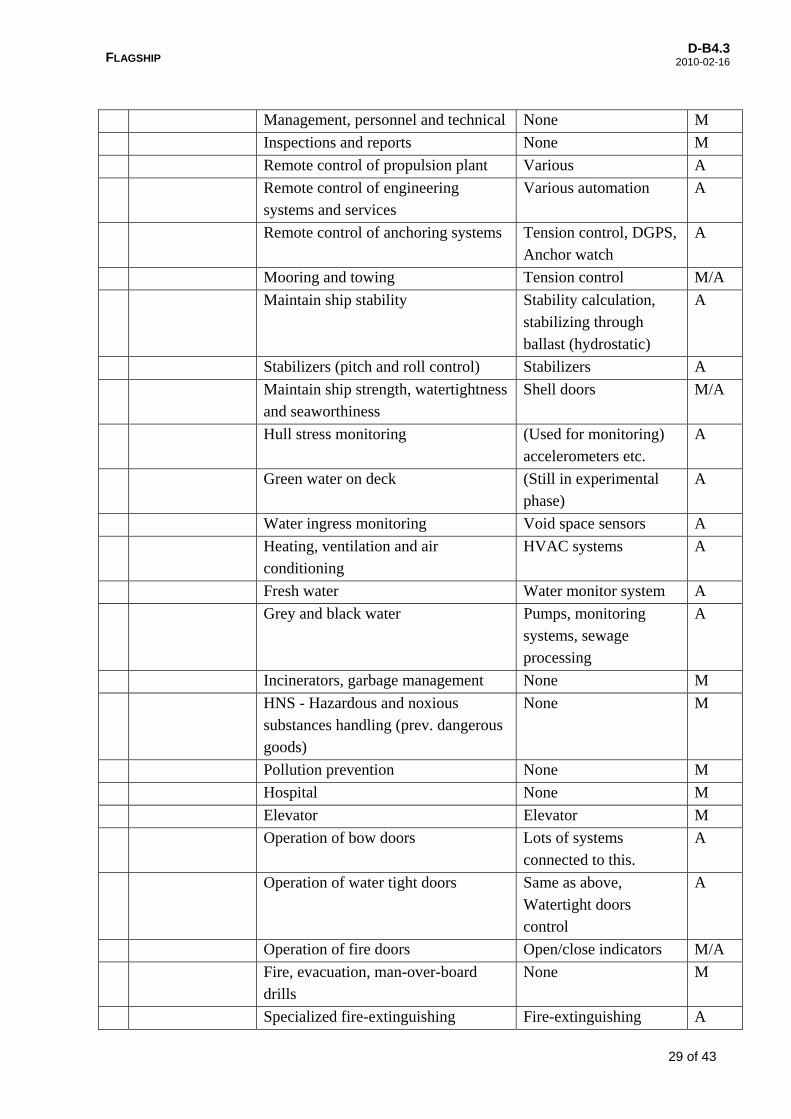
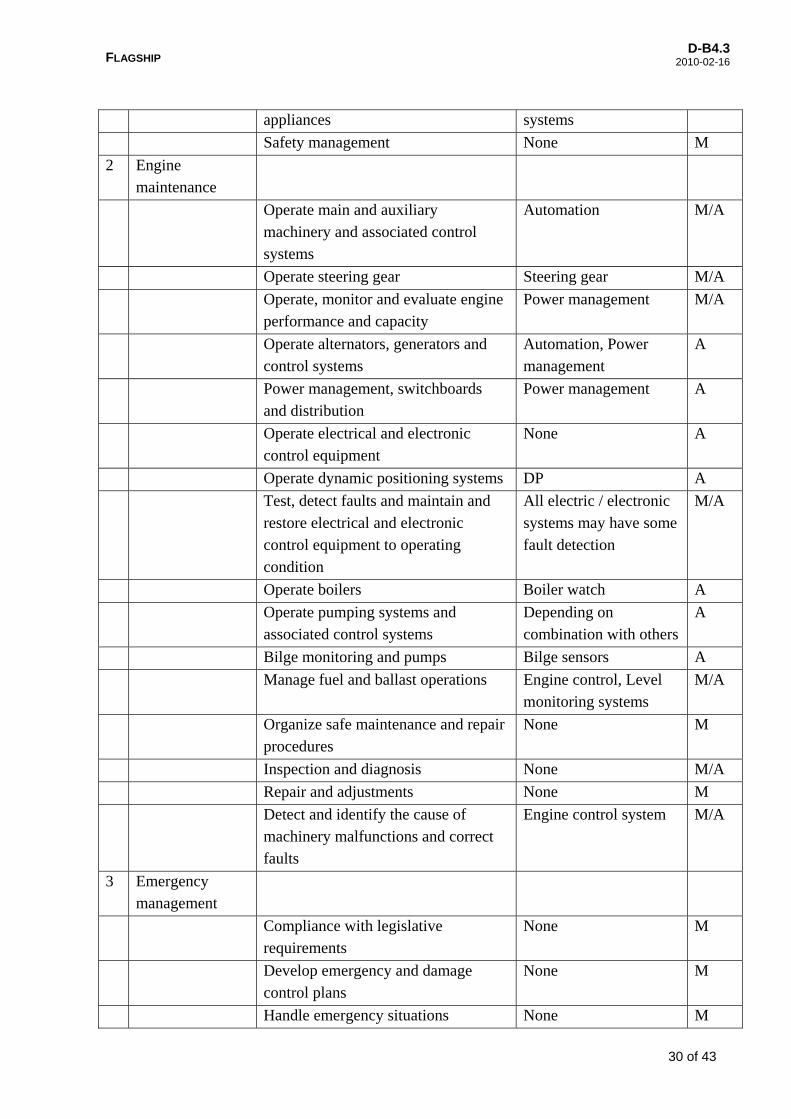
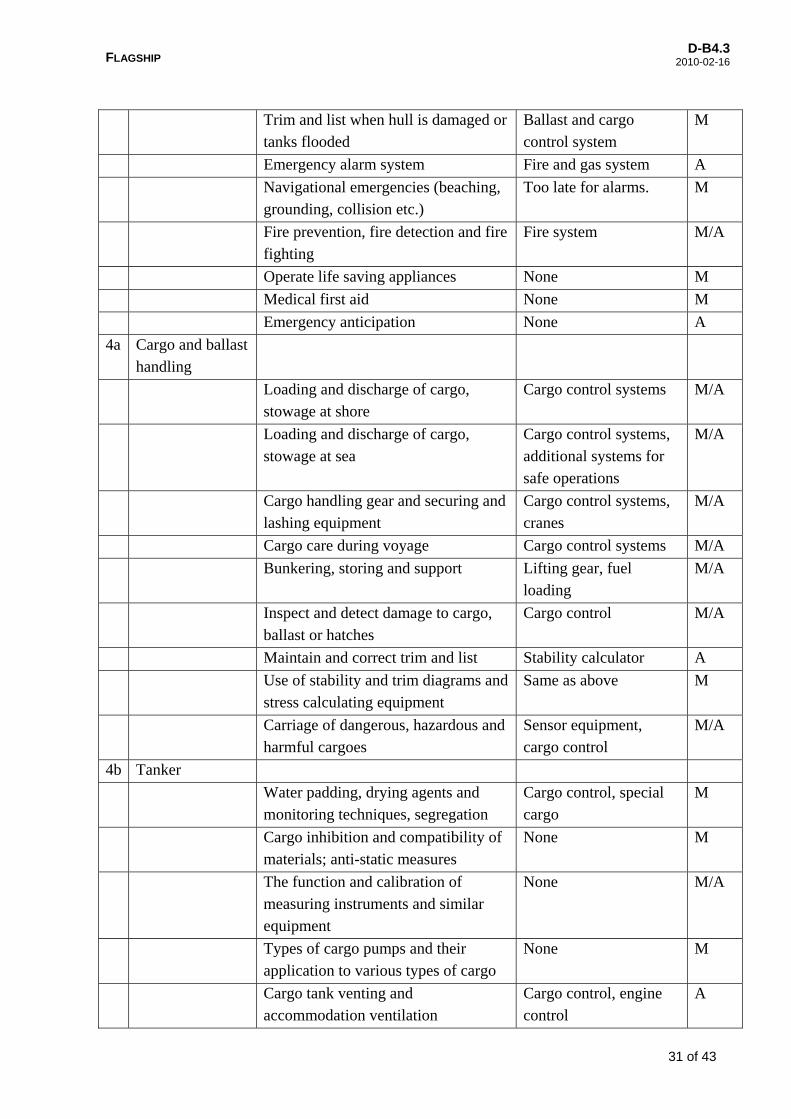
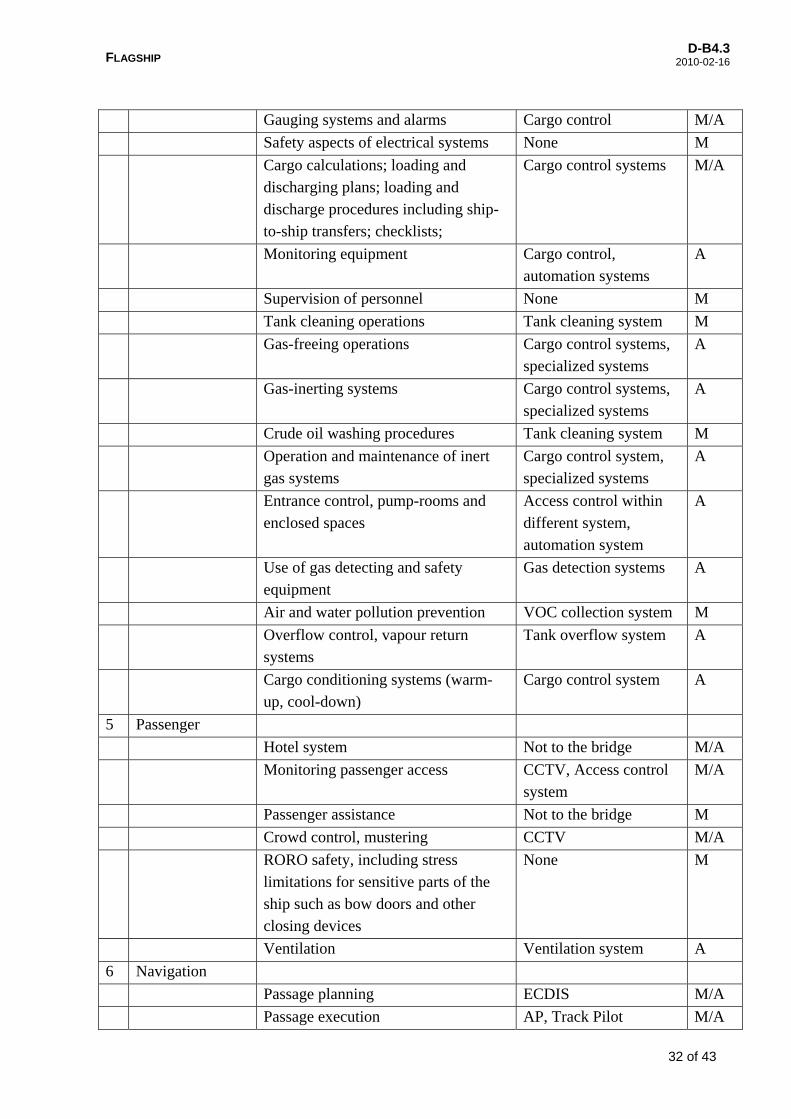
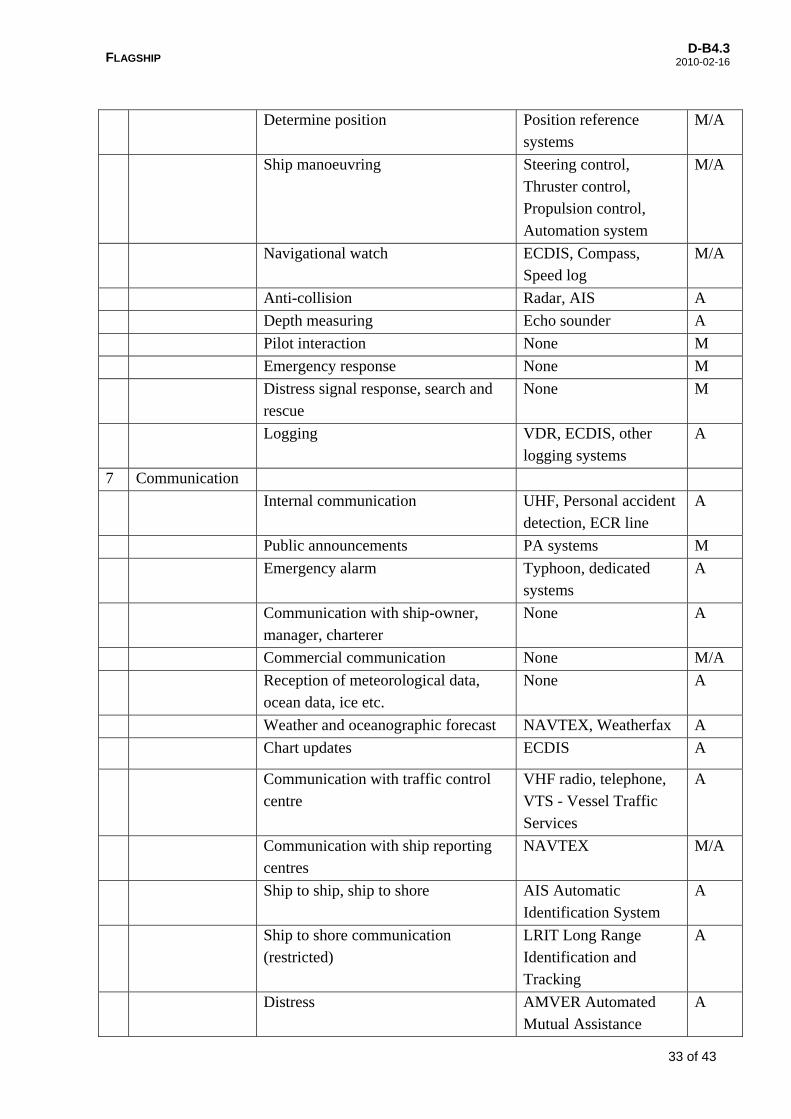
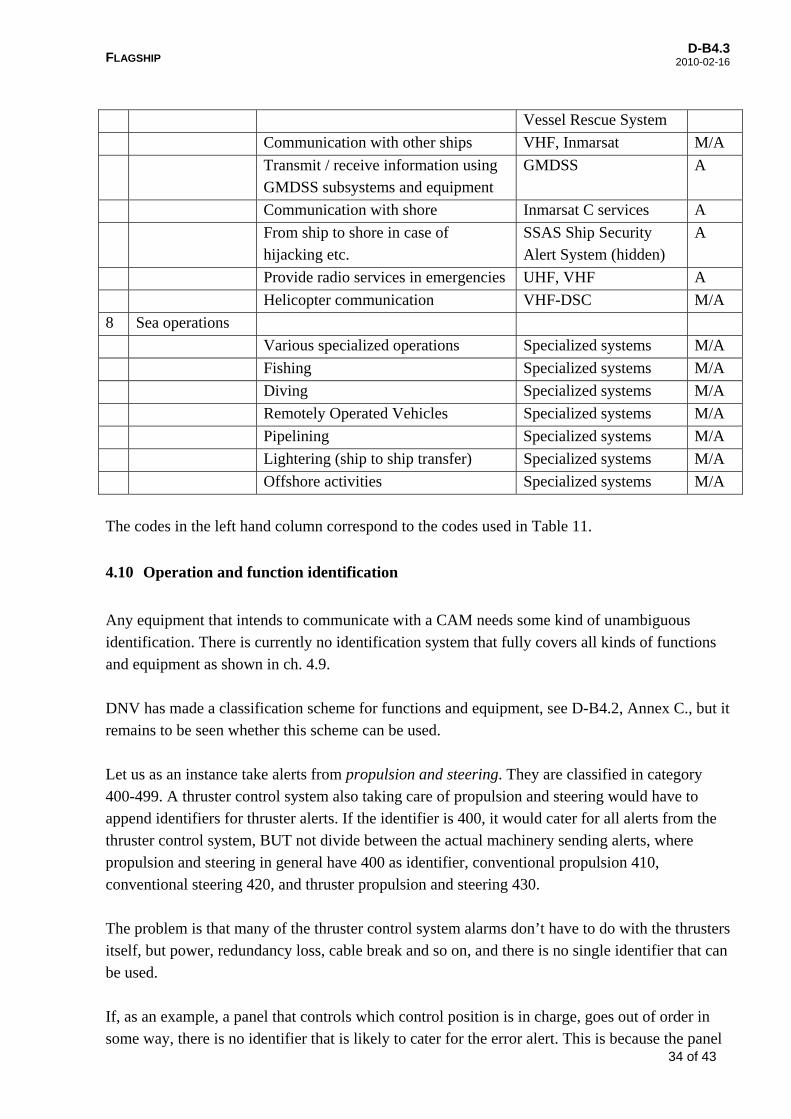
4.9 Ship operations and equipment
In the following table, we look at the main types of ship operations, their division into sub-functions, and corresponding equipment where this exists. This way, we gain an overview of the various types of equipment that will send alerts to the bridge and the CAM.
We also note whether the function is a manual (M) or an automated one (A), and in some cases both, as only automated functions may generate alerts.
The list of equipment was prepared in a general meeting of the subproject. It is intended to give a comprehensive overview of equipment so that one can gain a realistic picture of what a CAM may have to handle. It may, however, be open to further refinement and further re-categorization.
Table 12 – Ship operational functions and corresponding equipment
# Main Sub-function Equipment M/A
1 Operation of ship
Compliance with legislative requirements
None M
Monitoring ship access CCTV M/A
Manning, routines and orders None M
FLAGSHIP
D-B4.3 2010-02-16
29 of 43
Management, personnel and technical None M
Inspections and reports None M
Remote control of propulsion plant Various A
Remote control of engineering systems and services
Various automation A
Remote control of anchoring systems Tension control, DGPS, Anchor watch
A
Mooring and towing Tension control M/A
Maintain ship stability Stability calculation, stabilizing through ballast (hydrostatic)
A
Stabilizers (pitch and roll control) Stabilizers A
Maintain ship strength, watertightness and seaworthiness
Shell doors M/A
Hull stress monitoring (Used for monitoring) accelerometers etc.
A
Green water on deck (Still in experimental phase)
A
Water ingress monitoring Void space sensors A
Heating, ventilation and air conditioning
HVAC systems A
Fresh water Water monitor system A
Grey and black water Pumps, monitoring systems, sewage processing
A
Incinerators, garbage management None M
HNS - Hazardous and noxious substances handling (prev. dangerous goods)
None M
Pollution prevention None M
Hospital None M
Elevator Elevator M
Operation of bow doors Lots of systems connected to this.
A
Operation of water tight doors Same as above, Watertight doors control
A
Operation of fire doors Open/close indicators M/A
Fire, evacuation, man-over-board drills
None M
Specialized fire-extinguishing Fire-extinguishing A
FLAGSHIP
D-B4.3 2010-02-16
30 of 43
appliances systems
Safety management None M
2 Engine maintenance
Operate main and auxiliary machinery and associated control systems
Automation M/A
Operate steering gear Steering gear M/A
Operate, monitor and evaluate engine performance and capacity
Power management M/A
Operate alternators, generators and control systems
Automation, Power management
A
Power management, switchboards and distribution
Power management A
Operate electrical and electronic control equipment
None A
Operate dynamic positioning systems DP A
Test, detect faults and maintain and restore electrical and electronic control equipment to operating condition
All electric / electronic systems may have some fault detection
M/A
Operate boilers Boiler watch A
Operate pumping systems and associated control systems
Depending on combination with others
A
Bilge monitoring and pumps Bilge sensors A
Manage fuel and ballast operations Engine control, Level monitoring systems
M/A
Organize safe maintenance and repair procedures
None M
Inspection and diagnosis None M/A
Repair and adjustments None M
Detect and identify the cause of machinery malfunctions and correct faults
Engine control system M/A
3 Emergency management
Compliance with legislative requirements
None M
Develop emergency and damage control plans
None M
Handle emergency situations None M
FLAGSHIP
D-B4.3 2010-02-16
31 of 43
Trim and list when hull is damaged or tanks flooded
Ballast and cargo control system
M
Emergency alarm system Fire and gas system A
Navigational emergencies (beaching, grounding, collision etc.)
Too late for alarms. M
Fire prevention, fire detection and fire fighting
Fire system M/A
Operate life saving appliances None M
Medical first aid None M
Emergency anticipation None A
4a Cargo and ballast handling
Loading and discharge of cargo, stowage at shore
Cargo control systems M/A
Loading and discharge of cargo, stowage at sea
Cargo control systems, additional systems for safe operations
M/A
Cargo handling gear and securing and lashing equipment
Cargo control systems, cranes
M/A
Cargo care during voyage Cargo control systems M/A
Bunkering, storing and support Lifting gear, fuel loading
M/A
Inspect and detect damage to cargo, ballast or hatches
Cargo control M/A
Maintain and correct trim and list Stability calculator A
Use of stability and trim diagrams and stress calculating equipment
Same as above M
Carriage of dangerous, hazardous and harmful cargoes
Sensor equipment, cargo control
M/A
4b Tanker
Water padding, drying agents and monitoring techniques, segregation
Cargo control, special cargo
M
Cargo inhibition and compatibility of materials; anti-static measures
None M
The function and calibration of measuring instruments and similar equipment
None M/A
Types of cargo pumps and their application to various types of cargo
None M
Cargo tank venting and accommodation ventilation
Cargo control, engine control
A
FLAGSHIP
D-B4.3 2010-02-16
32 of 43
Gauging systems and alarms Cargo control M/A
Safety aspects of electrical systems None M
Cargo calculations; loading and discharging plans; loading and discharge procedures including ship-to-ship transfers; checklists;
Cargo control systems M/A
Monitoring equipment Cargo control, automation systems
A
Supervision of personnel None M
Tank cleaning operations Tank cleaning system M
Gas-freeing operations Cargo control systems, specialized systems
A
Gas-inerting systems Cargo control systems, specialized systems
A
Crude oil washing procedures Tank cleaning system M
Operation and maintenance of inert gas systems
Cargo control system, specialized systems
A
Entrance control, pump-rooms and enclosed spaces
Access control within different system, automation system
A
Use of gas detecting and safety equipment
Gas detection systems A
Air and water pollution prevention VOC collection system M
Overflow control, vapour return systems
Tank overflow system A
Cargo conditioning systems (warm-up, cool-down)
Cargo control system A
5 Passenger
Hotel system Not to the bridge M/A
Monitoring passenger access CCTV, Access control system
M/A
Passenger assistance Not to the bridge M
Crowd control, mustering CCTV M/A
RORO safety, including stress limitations for sensitive parts of the ship such as bow doors and other closing devices
None M
Ventilation Ventilation system A
6 Navigation
Passage planning ECDIS M/A
Passage execution AP, Track Pilot M/A
FLAGSHIP
D-B4.3 2010-02-16
33 of 43
Determine position Position reference systems
M/A
Ship manoeuvring Steering control, Thruster control, Propulsion control, Automation system
M/A
Navigational watch ECDIS, Compass, Speed log
M/A
Anti-collision Radar, AIS A
Depth measuring Echo sounder A
Pilot interaction None M
Emergency response None M
Distress signal response, search and rescue
None M
Logging VDR, ECDIS, other logging systems
A
7 Communication
Internal communication UHF, Personal accident detection, ECR line
A
Public announcements PA systems M
Emergency alarm Typhoon, dedicated systems
A
Communication with ship-owner, manager, charterer
None A
Commercial communication None M/A
Reception of meteorological data, ocean data, ice etc.
None A
Weather and oceanographic forecast NAVTEX, Weatherfax A
Chart updates ECDIS A
Communication with traffic control centre
VHF radio, telephone, VTS - Vessel Traffic Services
A
Communication with ship reporting centres
NAVTEX M/A
Ship to ship, ship to shore AIS Automatic Identification System
A
Ship to shore communication (restricted)
LRIT Long Range Identification and Tracking
A
Distress AMVER Automated Mutual Assistance
A
FLAGSHIP
D-B4.3 2010-02-16
34 of 43
Vessel Rescue System
Communication with other ships VHF, Inmarsat M/A
Transmit / receive information using GMDSS subsystems and equipment
GMDSS A
Communication with shore Inmarsat C services A
From ship to shore in case of hijacking etc.
SSAS Ship Security Alert System (hidden)
A
Provide radio services in emergencies UHF, VHF A
Helicopter communication VHF-DSC M/A
8 Sea operations
Various specialized operations Specialized systems M/A
Fishing Specialized systems M/A
Diving Specialized systems M/A
Remotely Operated Vehicles Specialized systems M/A
Pipelining Specialized systems M/A
Lightering (ship to ship transfer) Specialized systems M/A
Offshore activities Specialized systems M/A
The codes in the left hand column correspond to the codes used in Table 11.
4.10 Operation and function identification
Any equipment that intends to communicate with a CAM needs some kind of unambiguous identification. There is currently no identification system that fully covers all kinds of functions and equipment as shown in ch. 4.9. DNV has made a classification scheme for functions and equipment, see D-B4.2, Annex C., but it remains to be seen whether this scheme can be used. Let us as an instance take alerts from propulsion and steering. They are classified in category 400-499. A thruster control system also taking care of propulsion and steering would have to append identifiers for thruster alerts. If the identifier is 400, it would cater for all alerts from the thruster control system, BUT not divide between the actual machinery sending alerts, where propulsion and steering in general have 400 as identifier, conventional propulsion 410, conventional steering 420, and thruster propulsion and steering 430. The problem is that many of the thruster control system alarms don’t have to do with the thrusters itself, but power, redundancy loss, cable break and so on, and there is no single identifier that can be used. If, as an example, a panel that controls which control position is in charge, goes out of order in some way, there is no identifier that is likely to cater for the error alert. This is because the panel
FLAGSHIP
D-B4.3 2010-02-16
35 of 43
may cater for a control position at a vessel which combines conventional propulsion, conventional steering gear and thrusters. In this case, there is an error alert which affects all this equipment. For an actual thruster control system, the error is given in two alerts as RIO: Open loop/Cable break. IO error from utility panel. That is, a control panel, which is a part of the thruster control remote control system, goes out of order. In this case the equipment sending the alert should append some identifier. But ‘410, 420, 430’ seems awkward as an identifier. A single ‘400’ would be easier to use. That would identify the thruster control RCS as the system that communicates the failure. Maneuvering has 440 as identifier and would most likely be used for, e.g., autopilot alerts, while position keeping has 450 as identifier and would be used by the DP system. This infers that one cannot use 400 as the identifier of the alarm above, because the thruster control system is a different system from an autopilot and a DP system. It seems that some sort of configuration of the equipment identification must be used. The manufacturer must deliver an identifier as part of the alerts communicated to the CAM, as one cannot expect the systems manufacturers to deliver open software that a CAM responsible person configures. Then it is an open question whether one should identify the parts of the equipment sending an alarm. For systems with hundreds and thousands of different alarms, an identification of the failing sub-system could be useful. It naturally follows that one must look at a fully equipped vessel to see how different systems fulfill the vessel’s operations and functions. Different systems may communicate alerts with the same identifier, if the identifier is related to the equipment alone. It might be an idea to relate the identifier to the function that cannot any longer be performed.
FLAGSHIP
D-B4.3 2010-02-16
36 of 43
5. Alerts to the CAM
5.1 Technical alerts versus functional alerts
A main problem with the alert messages from equipment is that they are not necessarily understandable, nor do they present any help for finding the faulty part. Technical alerts are abundant, but should be avoided at the CAM, where one should await functional alerts.
See for instance this problem from an actual thruster control system, given in an FMEA for the system [FMEA]:
As one part (unimportant which one) of this system fails, the following alerts are received:
Timeout. No reply from card.
IO error from lever panel.
IO error from utility panel.
IO error from lever.
PS degraded.
And note that they arrive after different amounts of time.
This system delivers mostly technical alerts. The last alert is a functional alert telling that a certain process station has failed, and should be delivered to the CAM.
However, this alert appears many seconds after the buzzer has begun whining. So the alert situation has either to be acknowledged at the local alarm display, or one has to wait in order to see whether there arrives an alert at the CAM.
5.2 Alerts for the CAM
From the same FMEA, when another part (unimportant which one) fails, the following alerts are received:
Timeout. No reply from card.
IO error from lever panel.
IO error from utility panel.
IO error from lever.
In this case, there is no functional alert to send to the CAM. So what shall the system do?
The solution is to require from any system that they send functional alerts for any error situation. Then the system manufacturer will need to assess the system’s error states and secure that it can send unambiguous alerts as part of the protocol towards the CAM.
FLAGSHIP
D-B4.3 2010-02-16
37 of 43
5.3 Deciding alert categories
We also see that these seemingly unrelated and in themselves not alarming alerts, together present an error situation that needs to be classified as a Class A situation. One can thus not always say about the single alert message that it is an Emergency, Class A, a Class B or a Class C alert.
For some situations and configurations of the system, such as with a certain steering gear system in a given configuration [FMEA], it is necessary for many given alert combinations with immediate manual action, i.e., a pump must immediately be turned off. In other cases and configurations, the same alert may not lead to an emergency situation at all; it may in some way be ignored, as the function can be performed by redundant equipment.
Thus the alerts may not unambiguously classify for some definite classification of the message.
5.4 One window pr sender
Many alerts from different senders arriving at roughly the same time may confuse the officer at the CAM.
The CAM must be required to in an easy way show alarms from only one sender under such circumstances. A solution may be the ability to open different windows for each sender when required.
5.5 Local decision support
In deliverable B4-D2, ch. 3.1.5, there is a short discussion regarding decision support in a CAM. From the same FMEA discussed above, it appears that there is no immediate and unambiguous link between any arriving alert and its cause within the system. The cause can only be inferred from a detailed knowledge about the system and a certain set of alerts arriving. Further, there is no immediate understanding from the alert itself about what to do with the system from the cause. Knowledge about the system is needed in order to perform the necessary actions.
If the CAM should have the necessary knowledge about the system in order to perform decision support, it would require that the equipment manufacturer made such a decision support system for itself and then had it implemented on the CAM. This would require standardized software (language, platform etc.) far more than just a standardized protocol for alert messages between the systems. It is of course not impossible, but it would require a degree of co-operation between manufacturers that will take many years to obtain, if ever.
Decision support must be made locally at the alert-generating equipment, both for translating sets of technical alerts into functional alerts to be sent to the CAM, and for actions to be taken based upon the sets of technical alerts. These actions may then be sent to the CAM in order to help decision support there.
Decisions about what should be carried out as response to an alert are not only depending upon the alerts themselves and their relationships, but also of the configuration of the actual system. For the thruster control system discussed above, the decisions are different for the same error cause (and corresponding alerts) from whether levers can be run in backup mode or not, or from
FLAGSHIP
D-B4.3 2010-02-16
38 of 43
whether NFU is delivered or not. For a steering control system delivered from the same manufacturer, there is a wholly different FMEA with wholly different actions to be taken, given whether there is an NFU possibility or not for the steering gears. Thus, a local decision support system which is tailored for the actual configuration of the system and the vessel, is not only important for the crew, but also a necessity for the CAM if actions are to be taken as a response to the alert received at the CAM.
A decision support system for larger systems like the DP system would probably take years to develop with nearly 1000 different alerts. Normal bridge systems may have up to 100 different alerts, and the development of decision systems for such equipment is not likely to be done quickly.
In 4.1.1 of deliverable B4-D2 is discussed how detailed one can define the functional impact of an alert. Here we can conclude that alerts in themselves may be very confusing and that there is a need for decision support even though the bridge officers ought to know about whatever alerts that arrive and their possible reason.
5.6 Alerts and attention mode
In the deliverable mentioned above is also discussed whether there should be any prioritization based upon the ship mode or voyage phase. As we have seen in this chapter, the different situations of the vessel call for attention to different functions. Thus, it is more easily argued that prioritization of alerts ought to be dependent on attention mode and situation. Today we have no link to the attention mode and the actual situation of the vessel.
FLAGSHIP
D-B4.3 2010-02-16
39 of 43
6. Summary of findings
A model on a high level of abstraction of the objects and factors interacting on a vessel, and which produces alerts in various situations, has been found a very useful tool for further discussion.
A comprehensive overview of ship operations, functions and corresponding equipment gives a realistic view of the task that a CAM must handle.
Various factors both relating to the vessel itself and to its environment are decisive for the vessel’s total situation. These factors are related to the ship condition itself, the voyage phase of the vessel, emergencies both on board and in the vessel’s vicinity, weather, geography, etc.
The vessel’s situation demands a certain attention mode on board. This may affect the filtering at the CAM.
Functions on board any vessel can be grouped into convenient categories here called ship operations. All functions have been related to some equipment except when these functions are fully manual.
In the case of alert flooding, alerts from different systems will arrive in between each other, demanding that the senders of the alerts are unambiguously identified.
These identifiers ought to be defined globally by a central body, for instance SOLAS.
For the category of sea operations, there exists a lot of specialized equipment, and for this category, the project has only given a sample and not gone into details. However, a CAM must also be able to handle all sorts of specialized equipment. Thus a comprehensive survey of any kind of equipment used at any vessel should be carried out in order to secure proper identification and correct handling at the CAM.
The use of a CAM demands the use of one or a set of standardized protocols from the manufacturer of any equipment, including the global function/equipment identifiers.
A decision support system should not be part of the CAM, but rather locally with the local system for any equipment.
Decision support might be necessary to develop within each system wishing to communicate with the CAM.
A maintenance station ought to be able to receive alerts, also shelved alerts, from the CAM. There should be made a protocol for the communication between the CAM and the maintenance station.
There might be more than one CAM station. There should be made a protocol for the communication between the CAM stations.
If systems are not alive or the communication link to the CAM is broken, the CAM should be able to detect and present it.
FLAGSHIP
D-B4.3 2010-02-16
40 of 43
Summary of issues that are not fully closed:
So far we have not discussed whether alerts will have different consequences in different operational states. Alerts will have different consequences for different situations. The CAM may need to keep the operational and situational status of the vessel, the equipment and the alerts. This will have to be looked into in the next task.
The operational and situational status influences the CAM indirectly, through the functions performed in given situations. There is no direct link between the vessel’s situation or attention mode, and the CAM.
Equipment systems that wish to communicate with the CAM may have badly formulated alerts, an abundance of technical alerts, alerts for the same failure appearing at different points in time, etc. Thus one may have to require proper alert content for any system communicating with the CAM. The content of the protocol may be required to be unambiguous and clarifying. This may require extra work at the manufacturer’s.
Proper alert content for any system may take a long time to develop.
FLAGSHIP
D-B4.3 2010-02-16
41 of 43
7. References
[A917] IMO Resolution A.917(22) - Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS) - (adopted on 29 November 2001).
[AT96] ATOMOS II, Function and task analysis, Task 1.2.1, Contract number: WA-95-SC.205, ID code: A212.01.10.052.001, 1996.11.14.
[D-B4.1] Flagship deliverable D-B4.1: Ship type analysis, 2008-05-02.
[D-B4.2] Flagship deliverable D-B4.2: Ship equipment analysis, 2008-12-08.
[FLAGSHIP] Sixth Framework Programme, Priority 1.6.2., Sustainable Surface Transport. Integrated Project Annex I – “Description of Work”. FLAGSHIP 2006-01-19.
[FMEA] K-Thrust FMEA, KM 2007; K-Bridge ST FMEA, KM 2008.
[STCW] IMO: STCW – International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, with Amendments, 1978 and later.
[MSC 64] Resolution MSC.64(67), adopted on 4 December 1996, Adoption of new and amended performance standards, Annex 1 - Recommendation on Performance Standards for Integrated Bridge Systems (IBS).
[WP01] Formal safety assessment of containerships, J. Wang, P. Foinikis, Marine Policy 25 (2001)
FLAGSHIP
D-B4.3 2010-02-16
42 of 43
8. Annexes to the report
8.1 ATOMOS II classification
The ATOMOS II project defined a hierarchical breakdown of ship functions [AT96]. The below list is an extract of this classification down to three levels. Note that some codes are missing in the referenced document and that codes 3.1 and 3.2 have been added by one of the authors of this report.
1 Travel 1.1 Plan and prepare travel
1.1.1 Gather information 1.1.2 Plan transit (voyage plan) 1.1.3 Plan routine navigation 1.1.4 Load cargo 1.1.5 Prepare and start-up engines and aux. systems 1.1.6 Check manoeuvring systems
1.2 Conduct travel 1.2.1 Navigate 1.2.2 Control heading and speed 1.2.3 Monitor automatic control 1.2.4 Execute logging 1.2.5 Execute departure and arrival
1.3 Terminate travel 1.3.1 Unload cargo 1.3.2 Shut down engines and aux. systems
2 Communicate 2.1 Communicate with traffic control centres 2.2 Control receipt of meteorological data 2.3 Communicate with ship owner 3 Maintain platform 3.1 Maintain hull and ship integrity 3.2 Maintain main propulsion and power generation system 3.3 Maintain auxiliary platform systems
3.3.1 Monitor anchoring systems 3.3.2 Monitor load/unload systems 3.3.3 Monitor electric supply systems 3.3.4 Monitor hotel systems 3.3.5 Monitor cargo conservation systems
3.4 Maintain ship status 3.4.1 Maintain seaworthiness 3.4.2 Maintain water tightness 3.4.3 Maintain stability 3.4.4 Manage and control emergency
3.5 Maintain ship routine 3.5.1 Ensure correct promulgation of orders 3.5.2 Check quality of handover 3.5.3 Conduct training and evacuation procedures 3.5.4 Conduct training man-over-board operations
4 Monitor and maintain cargo status

FLAGSHIP
D-B4.3 2010-02-16
43 of 43
4.1 Anticipate state of cargo 4.1.1 Monitor position 4.1.2 Monitor cargo conservation status 4.1.3 Respond on incorrect cargo status
4.2 Anticipate risks for navigation plan 4.3 Anticipate risks for crew and passengers 4.4 Anticipate on expected motion patterns 5 Monitor passenger status
6 Anticipate emergency