comparing seven candidate mission configurations for temporal gravity field retrieval through...
TRANSCRIPT

1
A summary of the article entitled:
“Comparing seven candidate mission configurations for temporal gravity field retrieval
through full-scale numerical simulation”
Journal of Geodesy (2014) 88:31 – 43,
DOI 10.1007/s00190-013-0665-9
Basem Elsaka1,5
, Jean-Claude Raimondo2, Phillip Brieden
3, Tilo Reubelt
4, Jürgen Kusche
1,
Frank Flechtner2, Siavash Iran Pour
4, Nico Sneeuw
4 and Jürgen Müller
3
1- IGG - Institute of Geodesy and Geoinformation, University of Bonn, Germany
2- GFZ – German Research Centre for Geoscience, Oberpfaffenhofen, Germany
3- IfE, Institute of Geodesy, University of Hannover, Germany
4- GIS, Institute of Geodesy, University of Stuttgart, Germany
5- National Research Institute of Astronomy and Geophysics, Helwan, Cairo, Egypt
2
Abstract
The goal of this contribution is to focus on improving the quality of gravity field models in
the form of spherical harmonic representation via alternative configuration scenarios applied
in future gravimetric satellite missions. We performed full-scale simulations of various
mission scenarios within the frame work of the German joint research project “Concepts for
future gravity field satellite missions” as part of the Geotechnologies Program, funded by the
German Federal Ministry of Education and Research (BMBF) and the German Research
Foundation (DFG).
In contrast to most previous simulation studies including our own previous work, we
extended the simulated time span from one to three consecutive months in order to improve
the robustness of the assessed performance. New is that we performed simulations for seven
dedicated satellite configurations in addition to the GRACE scenario, serving as a reference
baseline. These scenarios include a “GRACE Follow-on” mission (with some modifications
to the currently implemented GRACE-FO mission), and an in-line “Bender” mission, in
addition to five mission scenarios that include additional cross-track and radial information.
Our results clearly confirm the benefit of radial and cross-track measurement information
compared to the GRACE along-track observable: The gravity fields recovered from the
related alternative mission scenarios are superior in terms of error level and error isotropy. In
fact, one of our main findings is that although the noise levels achievable with the particular
configurations do vary between the simulated months, their order of performance remains the
same. Our findings show also that the advanced pendulums provide the best performance of
the investigated single formations, however an accuracy reduced by about 2-4 times in the
important long-wavelength part of the spectrum (for spherical harmonic degrees < 50),
compared to the Bender mission, can be observed. Concerning state-of-the-art mission
constraints, in particular the severe restriction of heterodyne lasers on maximum range-rates,
only the moderate Pendulum and the Bender-mission are beneficial options, of course in
addition to GRACE and GRACE-FO.
Furthermore, a Bender-type constellation would result in the most accurate gravity field
solution by a factor of about 12 at long wavelengths (up to degree/order 40) and by a factor of
about 200 at short wavelengths (up to degree/order 120) compared to the present GRACE
solution. Finally, we suggest the Pendulum and the Bender missions as candidate mission
configurations depending on the available budget and technological progress.
Keywords. Numerical simulation, future gravity missions, temporal gravity field.
3
1. Introduction
During the past decade, the CHAMP (CHAllenging Minisatellite Payload), GRACE (Gravity
Recovery and Climate Experiment) and GOCE (Gravity recovery and steady-state Ocean
Circulation Explorer) missions have strongly improved the accuracy, spatial resolution, and
temporal resolution of the Earth’s gravity potential models. Nevertheless, further
improvements may be still expected when a next generation of gravimetric satellites will be
launched in formations different from the GRACE leader-follower configuration.
In the context of finding optimal scenarios, various studies were published in the last
years, e.g. by Sharifi et al. (2007), Sneeuw et al. (2008), Wiese et al. (2009), Elsaka (2010),
Elsaka et al. (2012), Elsaka (2013), and Iran Pour et al. (2013), which have investigated the
performance of certain single pair satellite formation missions, while the arrangement of a
second, inclined satellite pair in a Bender design was studied by Bender et al. (2008), Wiese et
al. (2011), and Wiese et al. (2012). For instance, Sharifi et al. (2007) compared the
performance of four basic (single pair) types of satellite formations (GRACE, pendulum,
Cartwheel and LISA-type) and found that the latter three missions would provide a lower
error spectrum with improved isotropy. Wiese et al. (2009) investigated the performance of
two and four inline-tandem constellations (i.e. GRACE-like) and Cartwheel missions. In two
ESA funded studies (Anselmi et al. 2011 and NG2 Team 2011), the capability of single and
multiple inline formation mission scenarios with identical and different inclinations (the so-
called “Bender-design”, Bender et al. 2008, see Fig. 1 bottom-right) was studied as well as the
performance and technical realization of different formations and double satellite pairs in
Bender design. The arrangement of a second, inclined satellite pair in a Bender design was
studied by Wiese et al. (2011), where a Monte-Carlo method was applied to sample the
enormous parameter search space mentioned above. Alternative future formations were
studied e.g. in Elsaka et al. (2012) and Elsaka (2013), where concepts of two-satellite and
multi-satellite missions were investigated. As a common result, all these studies show that a
significant increase in accuracy and sensitivity is expected when a future formation will be
launched in an alternative configuration, different from the GRACE leader-follower scheme.
In 2009, the project “Concepts for future gravity field satellite missions”, funded by the
‘Geotechnologies Program’ of the German Federal Ministry of Education and Research
(BMBF) and the German Research Foundation (DFG), was established in a partnership
between various German scientific and industry partners. One of the main project goals was to
define stable formation configurations to optimize time-variable gravity field recovery. To
4
this end, in the first step a catalogue of suitable orbit and formation parameters was defined
while potential future developments (aim: year 2020) of metrology and system design are
considered. Eight satellite formation designs have been investigated in detail including the
GRACE mission as reference: a modified version (with a small cross-track component and a
lower orbit) of the currently implemented GRACE Follow-on (GRACE-FO) mission
(Flechtner et al. 2013), a moderate Pendulum (with a small cross-track angle < 30°,
abbreviated as “mod. Pend.”), a Cartwheel, a Helix (cf. LISA-type in Elsaka et al. 2012) and
an in-line Bender configuration (Bender et al. 2008) (see Fig. 1) in addition to two advanced
Pendulum configurations (with a larger cross-track angle of 45°, labeled “adv. Pend. 1” and
“adv. Pend. 2”). All mission scenarios have been assumed as drag-free except for the GRACE
and GRACE-FO missions.
Simulated measurements are derived using GFZ’s EPOS (Earth Parameter and Orbit
System) software for different types of sensors, such as SST (satellite-to-satellite tracking)
instruments and accelerometers. Both sensor types provide a major contribution to gravity
field determination and their performance affects the results in different frequencies. While
long-wavelength gravity field signals are currently limited by accelerometer noise, short-wave
signal components are limited by SST noise. Therefore, to simulate the reality as close as
possible, we computed colored noise time series from PSDs (power spectral density) of the
involved sensors and added these to the simulated error-free measurements.
Finally, full-scale gravity recovery has been performed using the IGG’s GROOPS
(Gravity Recovery Object Oriented Programming System) software (Mayer-Gürr 2006), and
the results ’recovered minus true’ are analyzed in the spectral and spatial domain.
It is worth noting that in most of the above-mentioned studies (Sharifi et al. 2007,
Sneeuw et al. 2008, Wiese et al. 2009, Elsaka 2010 and Elsaka et al. 2012) only a time span of
one month was analyzed, mostly due to computational reasons. It is not clear how robust their
assessments with respect to changing orbital patterns, differing noise realization, and other
effects (that may change over time) really are. Therefore, we decided to implement a three-
month simulation (March – May 2004) to examine time-variable gravity recovery from our
mission scenarios.
The paper is organized as follows: section 2 reviews the orbital characteristics and
parameters selected for our mission configuration scenarios. Then, the methodology of the
full-scale simulation, which consists of forward and backward procedures, is described in
section 3. In the context of section 3, we also illustrate the generation of the colored noise

5
applied to the SST instruments and accelerometers. Our obtained gravity results are presented
in section 4. Finally, conclusions relevant for FGM (future gravity mission) scenarios are
provided in section 5.
Figure 1. The investigated FGM configurations, GRACE-reference (top-left), alternative
GRACE Follow-on (top-middle), Cartwheel (top-right), Pendulum (bottom-left), Helix
(bottom-middle) and in-line Bender (bottom-right).
2. Selection of mission and orbit parameters
Technological progress in satellite system and metrology needs to go hand in hand with an
optimization of orbit and formation parameters. A variety of such parameters can be adjusted
within certain ranges in order to improve the performance of a gravity mission within a target
spectral bandwidth and with respect to given performance criteria. These parameters include
the orbital altitude, the inter-satellite distance, the inclination, the repeat mode depending on
the orbital height and the inclination, and, of course, the number of satellites and satellite links
to create a possible multi-satellite/formation mission. By means of an appropriate choice of
these parameters, error isotropy can be improved and aliasing can be reduced. In addition,
through the choice of the satellite distance also the sensitivity can be optimized.
6
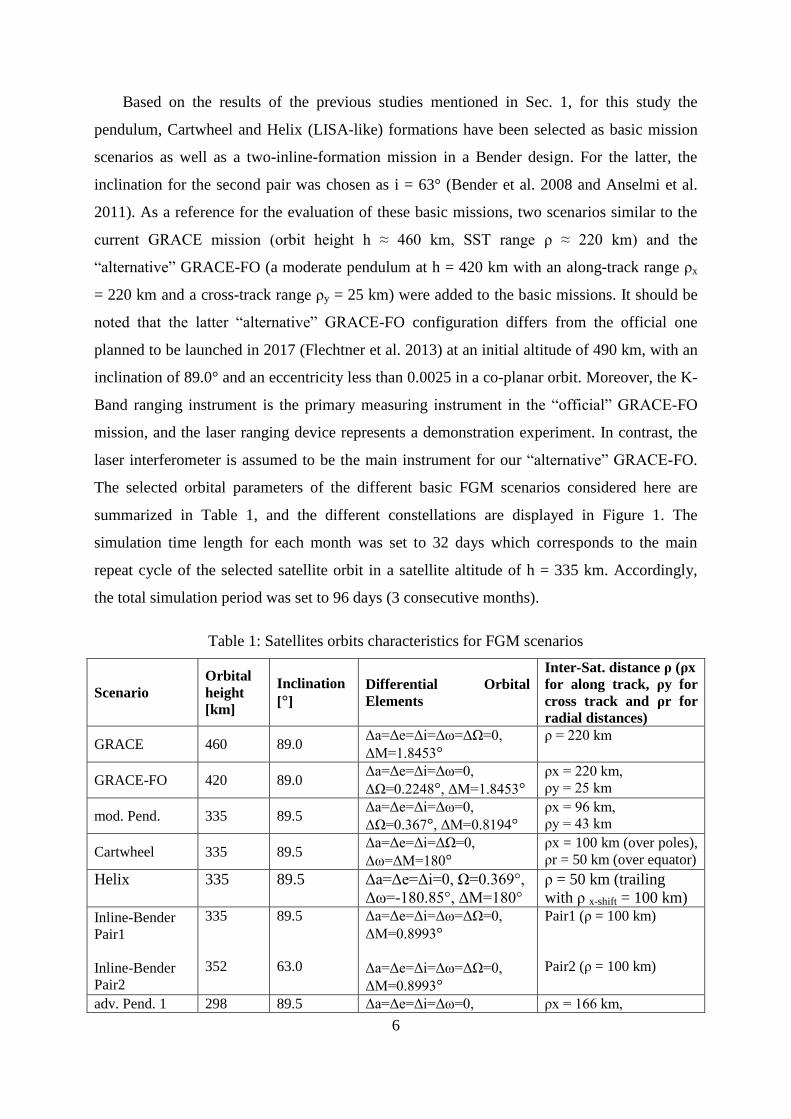
Based on the results of the previous studies mentioned in Sec. 1, for this study the
pendulum, Cartwheel and Helix (LISA-like) formations have been selected as basic mission
scenarios as well as a two-inline-formation mission in a Bender design. For the latter, the
inclination for the second pair was chosen as i = 63° (Bender et al. 2008 and Anselmi et al.
2011). As a reference for the evaluation of these basic missions, two scenarios similar to the
current GRACE mission (orbit height h ≈ 460 km, SST range ρ ≈ 220 km) and the
“alternative” GRACE-FO (a moderate pendulum at h = 420 km with an along-track range ρx
= 220 km and a cross-track range ρy = 25 km) were added to the basic missions. It should be
noted that the latter “alternative” GRACE-FO configuration differs from the official one
planned to be launched in 2017 (Flechtner et al. 2013) at an initial altitude of 490 km, with an
inclination of 89.0° and an eccentricity less than 0.0025 in a co-planar orbit. Moreover, the K-
Band ranging instrument is the primary measuring instrument in the “official” GRACE-FO
mission, and the laser ranging device represents a demonstration experiment. In contrast, the
laser interferometer is assumed to be the main instrument for our “alternative” GRACE-FO.
The selected orbital parameters of the different basic FGM scenarios considered here are
summarized in Table 1, and the different constellations are displayed in Figure 1. The
simulation time length for each month was set to 32 days which corresponds to the main
repeat cycle of the selected satellite orbit in a satellite altitude of h = 335 km. Accordingly,
the total simulation period was set to 96 days (3 consecutive months).
Table 1: Satellites orbits characteristics for FGM scenarios
Scenario
Orbital
height
[km]
Inclination
[°]
Differential Orbital
Elements
Inter-Sat. distance ρ (ρx
for along track, ρy for
cross track and ρr for
radial distances)
GRACE 460 89.0 Δa=Δe=Δi=Δω=ΔΩ=0,
ΔM=1.8453°
ρ = 220 km
GRACE-FO 420 89.0 Δa=Δe=Δi=Δω=0,
ΔΩ=0.2248°, ΔM=1.8453°
ρx = 220 km,
ρy = 25 km
mod. Pend. 335 89.5 Δa=Δe=Δi=Δω=0,
ΔΩ=0.367°, ΔM=0.8194°
ρx = 96 km,
ρy = 43 km
Cartwheel 335 89.5 Δa=Δe=Δi=ΔΩ=0,
Δω=ΔM=180°
ρx = 100 km (over poles),
ρr = 50 km (over equator)
Helix 335 89.5 Δa=Δe=Δi=0, Ω=0.369°,
Δω=-180.85°, ΔM=180°
ρ = 50 km (trailing
with ρ x-shift = 100 km)
Inline-Bender
Pair1
Inline-Bender
Pair2
335
352
89.5
63.0
Δa=Δe=Δi=Δω=ΔΩ=0,
ΔM=0.8993°
Δa=Δe=Δi=Δω=ΔΩ=0,
ΔM=0.8993°
Pair1 (ρ = 100 km)
Pair2 (ρ = 100 km)
adv. Pend. 1 298 89.5 Δa=Δe=Δi=Δω=0, ρx = 166 km,

7
ΔΩ=1.4247°, ΔM=1.4247° ρy = 166 km
adv. Pend. 2 298 89.5 Δa=Δe=Δi=Δω=0,
ΔΩ=0.7123°, ΔM=0.7123°
ρx = 83 km,
ρy = 83 km
x and r are the maximum along-track and radial distances for the cartwheel, y is the
maximum cross-track component of a pendulum. x-shift means the along-track shift of a
LISA-formation with has a range .
Experience from the GRACE mission showed that ground track coverage via the choice
of orbit repeat modes can have a significant influence on the quality of the gravity retrievals.
For instance, Wagner et al. (2006) showed that large unobserved gaps caused by short repeat
cycles degrade GRACE solutions seriously. Visser et al. (2010) obtain better results for a
repeat orbit of β/α = 79/5 (β orbital revolutions in α nodal days) compared to a (125/8) repeat
cycle for short time solutions (5-8 days). Wiese et al. (2012) concluded that 13 day repeat
orbits are an optimal choice for Bender-type constellations. A similar observation was made
in (Iran Pour et al. 2013) in future mission studies. Here, it was suggested to choose longer
repeat modes (e.g. 32 days) to guarantee a dense spatial sampling in monthly solutions.
Simultaneously, a homogeneous evolution of the ground track gap should be selected and
large unobserved gaps in the ground track evolution should be avoided. The (503/32) repeat
cycle shows a homogeneous gap evolution with a moderate sub-cycle and pseudo sub-cycle of
7 and 4 days, respectively. The pseudo sub-cycle differs from a moderate sub-cycle in that,
within every repeat orbit, there is one main sub-cycle where the ground-track pattern gets
almost homogeneous (i.e. the maximum and minimum gaps get close to each other), but there
are also some pseudo sub-cycles (before the main sub-cycle). So, for example, in the case of
repeat orbit 503/32, the 7th day is the main sub-cycle and the 4th day is the pseudo sub-cycle
or second sub-cycle. This means that with 4 days we have the second good homogeneous
ground-track pattern, which happens before the main sub-cycle with 7 days. So, we may
define the pseudo sub-cycle as a time interval with almost homogeneous ground-track
patterns before sub-cycle. Accordingly, a repeat orbit can have one (or even more than one)
pseudo sub-cycle.
In contrast, the drifting (511/32) orbit shows large unobserved gaps over the whole time
evolution. In Iran Pour et al. (2013), a variety of repeat patterns is investigated with a quick
look tool that allows the analysis of aliasing behavior. As a result, a homogeneous evolution
of the ground track spacing is not only important for a full repeat cycle recovery, but also for
the estimation of short time interval solutions (3-6 days). Thus, the (503/32) repeat orbit,
originally suggested by Anselmi et al. (2010) appears as a good choice and it fulfills the
assumptions on the orbit height with h ≈ 335 km approximately.
8
We mention that the selection of an average satellite distance ρavg of 100 km together
with the orbit height of h = 335 km (for most considered future scenarios, see Table 1) is
based on the rule that the best sensitivity is reached for a large SST distance and a low orbital
height (Reubelt et al. 2011). However, a too large inter-satellite distance will cause problems
for laser technology (e.g. pointing issues, signal strength, noise) and a too low orbital height
appears problematic due to a higher air drag limiting the mission lifetime. Therefore, the
selected satellite distance and orbit height have to guarantee a compromise between
technological feasibility and geodetic sensitivity. Furthermore, Reubelt et al. (2011) showed
that the increase of accuracy is quite low for SST-distances larger than 100 km, where the
impact of the distance dependent laser noise becomes more important.
When considering such formations as the pendulum, cartwheel or LISA/helix, certain
technological constraints imposed by the relative motion of satellites have to be taken into
account. The main constraints concerning state-of-the-art technology are (Reubelt et al, 2014):
- the maximum range-rate should be kept within ±10 m/s,
- the line-of-sight angle between the two satellites should be kept within ±30° in yaw-
/pitch-direction.
The first constraint arises from the application of heterodyne lasers (Sheard et al. 2012) in
SST-links, which are already in an advanced technological level. The second constraint is
important to keep the energy consumption (because of, e.g., active satellite tracking for
satellite fine-pointing and enlarged air-drag due to slanted satellite) in a moderate state and
thus enable long mission lifetimes (please see Reubelt et al., 2014).
The first constraint is only fulfilled by GRACE, GRACE-FO and the moderate
pendulum, for the latter the maximum pendulum angle is fixed to 24° in order to keep the
range-rates below ±10 m/s. These three designs also fulfill the second constraint. Cartwheel
and LISA/helix formations are much more critical concerning the constraints due to the radial
component in their formation. The second constraint is impossible to be fulfilled by
cartwheels and LISA (due to their circular/elliptical relative motion), and apart from this, also
the first constraint appears to be problematic. Cartwheels show a large range variety due to
the 2:1 elliptical motion (Sharifi et al. 2007), and the range-rate criteria can only be met by
cartwheels with short baseline lengths (avg = 13.5 km) which lead to a severe loss of
sensitivity (Reubelt et al. 2011). The LISA formation seems optimal in fulfilling the first
constraint due to the nominal circular motion (range-rate = 0). Due to the perigee drift
induced by the Earth’s flattening the LISA motion deforms to an ellipse and the range-rates
9
again exceed the postulated limits, which can be overcome again only by too short baseline
lengths. One trick to make cartwheel and LISA formations fulfill the second constraint is to
shift one of the satellites out of the relative ellipse by a certain distance in along-track, which
leads to so-called trailing cartwheels/LISA. Of course, by such a manipulation isotropy is lost
due to a dominating along-track component, but on the benefit of fulfilling the second
constraint. In our contribution we implemented a trailing LISA (instead of LISA itself) which
is called helix due to its characteristic relative motion. If a satellite in a LISA-formation with
an inter-satellite distance is shifted with x-shift = 2 then the yaw angle is kept within ±30°
(pitch angle within ±15°). The cartwheel is taken as non-trailing formation and it can be
considered as an option in case of future developments, where the second constraint might not
be restrictive anymore. However, due to the introduced offset x-shift in along track direction
the helix satellite distance is not constant anymore (even if perigee drift is neglected) and thus
experiences strong range-rates, exceeding the range-rate constraint of
10m/s by far. To
keep the range-rate within this constraint, an average satellite distance of avg = 16 km similar
as for the cartwheel has to be selected, which would mean a clear decrease in sensitivity. In
order to establish formations with reasonable sensitivity, we selected a cartwheel and helix
with longer average inter-satellite distances avg = 78 km and avg = 112 km, respectively,
producing maximum range-rates of approximately = ±60 m/s. These two formations may
be regarded as unfeasible concerning the discussed heterodyne lasers (Sheard et al. 2012) but
might be possible with future laser technology. An option, which is under investigation, is
frequency comb laser systems (Coddington et al. 2009), which do not suffer from strict range-
rate constraints.
In summary, the investigated missions can be classified in three groups:
1) Feasible missions, with no or only minor relative motion of the satellites. This
group is represented by the Bender mission consisting of two inline pairs. This
formation has already been established with GRACE and is regarded as
unproblematic, although the four satellites would increase the mission costs.
2) Missions fulfilling the constraints: these are the two pendulum missions with a
smaller pendulum angle, namely the moderate pendulum and GRACE-FO. Although
they fulfill the constraints, they have to be regarded as a challenge due to their relative
motion, which imposes strong demands in formation control, laser instruments and
active satellite tracking.
10
3) Challenging missions: the mission exceeding the constraints, especially those for
the maximum range-rates. These are cartwheel and helix, and two versions of
challenging pendulums (adv. Pend. 1 and 2) with a larger pendulum angle of 45° and
average satellite distances of avg = 200/150 km leading to approximate maximum
range-rates of 80/60 m/s, respectively. For their implementation advanced future laser
technology is necessary, and system design and control systems are opposed to much
higher demands as the previous group. It has to be mentioned that for the challenging
pendulums additionally lower orbit heights are chosen, enabling higher resolution, but
increasing problems of insufficient mission lifetimes due to enlarged air-drag.
3. Methodology of full-scale simulation
3.1. Forward simulation process
For all the above-mentioned mission scenarios, simulated satellite orbits and true observations
were generated using GFZ’s Earth Parameter and Orbit System (EPOS) software package.
EPOS consists of a collection of tools built around the core module OC (Orbit Computation),
and it is able to simulate many observation types such as GPS (Global Positioning System),
GRACE K-band SST, SLR (Satellite Laser Ranging), DORIS (Doppler Orbitography and
Radiopositioning Integrated by Satellite) or altimetry.
The forward simulation is then performed by integrating sequentially the satellite orbits
in the formation over the complete 96 days period, while applying true background models,
cf. Table 2, and dedicated models for non-gravitational accelerations (only for GRACE and
GRACE-FO, see Table 2). The orbit integrator yields not only the 96 days long orbit files but
also the “measured” and error-free surface forces computed from the non-gravitational force
models (pseudo accelerometer data), the inter-satellite range-rate measurements as well as the
star camera data (attitude data), which are then used by GROOPS, as input to the gravity field
recovery, after adding noise for SST and accelerometer data (see below). The star camera
data, generated by the EPOS software, are used by the GROOPS software as error-free data.
It is important to mention here that in the frame of our project “Concepts for future
gravity field satellite missions”, we have compared all the gravitational and non-gravitational
accelerations at discrete points on the orbit between the GFZ-EPOS and the IGG-GROOPS
software packages. We have found that the agreement was at the level of 1.e-14 m/s/s or
better. For such comparison between GFZ-EPOS and IGG-GROOPS, please see Reubelt et
al., (2014).

11
3.2. Backward simulation process
The backward simulation process (gravity analysis step) implemented through the IGG-
GROOPS software is based on the solution of the Newton-Euler's equation of motion,
formulated as a boundary value problem of a Fredholm-type integral equation for setting up
the observation equations (Mayer-Gürr 2006). In fact, many strategies may be (and will be,
undoubtly) exploited for gravity recovery with future missions, however we choose to adhere
as close as possibly to the analysis as performed at IGG for real GRACE data (Mayer-Gürr et
al. 2005 and Mayer-Gürr 2006).
First, all observations including satellite orbits, accelerometer, inter-satellite range-rate
and attitude data files have been split into arcs of 35 minutes based on the short arc approach
that is implemented at IGG for analysis of real GRACE data. Here, “short” means a fraction
of a satellite orbit significantly less than one revolution. The short arc technique reduces the
accumulated effects of the perturbing forces acting on a satellite orbit. Moreover, it enables to
use the positions, range and the range-rate measurements as observations directly, and also
allows for data gaps. The observation equations are then set up for each short arc as a
linearized Gauss-Markov model as
2 -1= + with = ,l Ax ε C(ε) σ P [1]
with l containing the range-rate observations, A the design matrix (composed of partial
derivatives obtained by differentiating the range-rates w.r.t. the unknown parameters), x the
sought-for gravity parameters, ε the error vector, and C(ε) its corresponding covariance
matrix. σ2 stands for the variance factor for each satellite arc and P represents the weight
matrix of the observations. The least-squares solution of Eq. [1] leads to the following system
of normal equations (Koch and Kusche 2001),
T Twith and .Nx=n N= A PA n= A Pl [2]
The solution of the normal equations yields the estimation of the unknown parameters as
-1 T -1 T= =( ) .x N n A PA A Pl [3]
The normal equations can be directly accumulated from the individual arc-wise blocks as
m mT T
i i i i i i
i=1 i=1
= = and = = . N A P A n A Pl
[4]
In a next step, according to Eq. [4], the normal equations are directly solved via
Cholesky decomposition (Koch 1997). The output is then a set of spherical harmonic
12
coefficients which can be compared to the true coefficients (of the EIGEN-GL04C model) and
their differences are visualized in spectral and spatial domains.
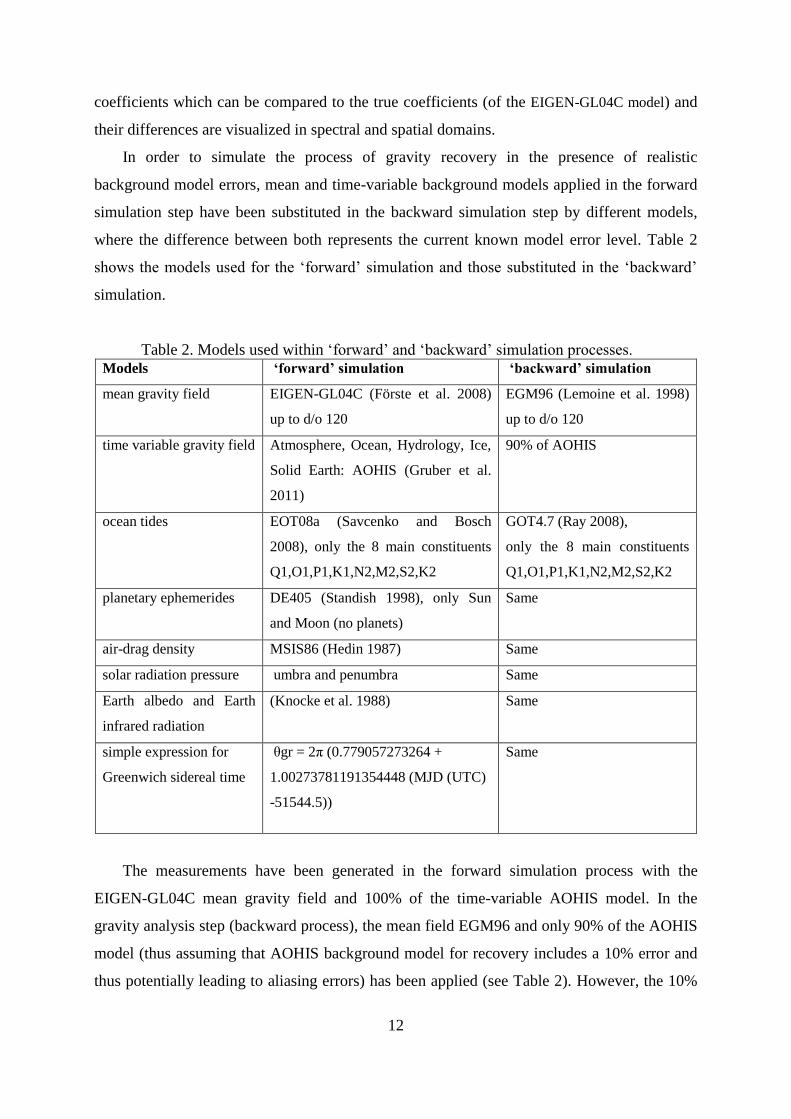
In order to simulate the process of gravity recovery in the presence of realistic
background model errors, mean and time-variable background models applied in the forward
simulation step have been substituted in the backward simulation step by different models,
where the difference between both represents the current known model error level. Table 2
shows the models used for the ‘forward’ simulation and those substituted in the ‘backward’
simulation.
Table 2. Models used within ‘forward’ and ‘backward’ simulation processes.
Models ‘forward’ simulation ‘backward’ simulation
mean gravity field EIGEN-GL04C (Förste et al. 2008)
up to d/o 120
EGM96 (Lemoine et al. 1998)
up to d/o 120
time variable gravity field Atmosphere, Ocean, Hydrology, Ice,
Solid Earth: AOHIS (Gruber et al.
2011)
90% of AOHIS
ocean tides EOT08a (Savcenko and Bosch
2008), only the 8 main constituents
Q1,O1,P1,K1,N2,M2,S2,K2
GOT4.7 (Ray 2008),
only the 8 main constituents
Q1,O1,P1,K1,N2,M2,S2,K2
planetary ephemerides DE405 (Standish 1998), only Sun
and Moon (no planets)
Same
air-drag density MSIS86 (Hedin 1987) Same
solar radiation pressure umbra and penumbra Same
Earth albedo and Earth
infrared radiation
(Knocke et al. 1988) Same
simple expression for
Greenwich sidereal time
θgr = 2π (0.779057273264 +
1.00273781191354448 (MJD (UTC)
-51544.5))
Same
The measurements have been generated in the forward simulation process with the
EIGEN-GL04C mean gravity field and 100% of the time-variable AOHIS model. In the
gravity analysis step (backward process), the mean field EGM96 and only 90% of the AOHIS
model (thus assuming that AOHIS background model for recovery includes a 10% error and
thus potentially leading to aliasing errors) has been applied (see Table 2). However, the 10%
13
signal not removed in the backward analysis contains a monthly mean, which does not
contribute to temporal aliasing and should be picked up by the analysis and transformed into
the mean estimated model, which in turn means that this mean needs to be considered when
comparing estimated and true monthly models. In addition, for simplicity, no relativity,
precession, nutation, polar motion or Earth and pole tides have been applied during both
forward and backward simulations. This does not affect the overall simulation conclusions.
In order to simulate gravity recovery as close to reality as possible, colored noise in terms
of PSD (power spectral density) from the involved sensors was added to the noise-free
observations, provided by the forward step, during the gravity field determination. In the
following, the generation of colored noise time series is thoroughly described.
3.3. Generating colored noise from sensor PSD
Both SST ranging sensors and accelerometers provide a major contribution to gravity field
determination. Comparative analyses are performed in the frequency domain on PSD level, to
establish noise models that allow us to take sensor noise in a realistic way into account. Under
the simplified assumption that only some influencing factors affect the sensor performance,
frequency-dependent noise characteristics are modeled here for SST and ACC measurements.
Interactions between satellite instruments as well as attitude dependent factors are not
considered.
Colored noise of SST sensor
In the simulation scenarios, a laser interferometer similar to the laser ranging instrument
(LRI) developed for GRACE follow-on mission (Sheard et al. 2012) is assumed to be used as
SST instrument. In this work the SST performance is modeled in terms of ASD (amplitude
spectral density) as a square root of PSD with the distance-dependent factor, i.e. involving the
average distance (avg, see Table 1) between two satellites as
2
2 avg9 12ρ100 m
ASD PSD 50 10 355 10 2π SF100 km s Hz
ff
. [5]
The performance is based on a (highly) simplified model in which only frequency-
dependent noise component (100/f . (355
. 10
-12
. avg/100 km)
2) [m/s/sqrt(Hz)] and a white
noise component (50 . 10
-9)2
[m/s/sqrt(Hz)] has been considered to account for various noise
sources (e.g. thermal effects, parasitic accelerations, readout noise, detection noise and
actuation noise). In addition to the white noise component, an additional safety factor (SF) is
14
included which is set to 2 for the current analysis to account for unmodeled error sources. The
factor f2 induces the conversion of ranges to range-rates, the data unit in which SST
measurements are integrated into gravity field processing. The amplitude spectral density
obtained from [Eq. 5] is applied for all configurations except for GRACE, for which we
assume a noise level of
6 mASD PSD 2.1 10 2π
s Hzf
,
[6]
following Gerlach et al. (2005) and a height of 460 km (Table 1).
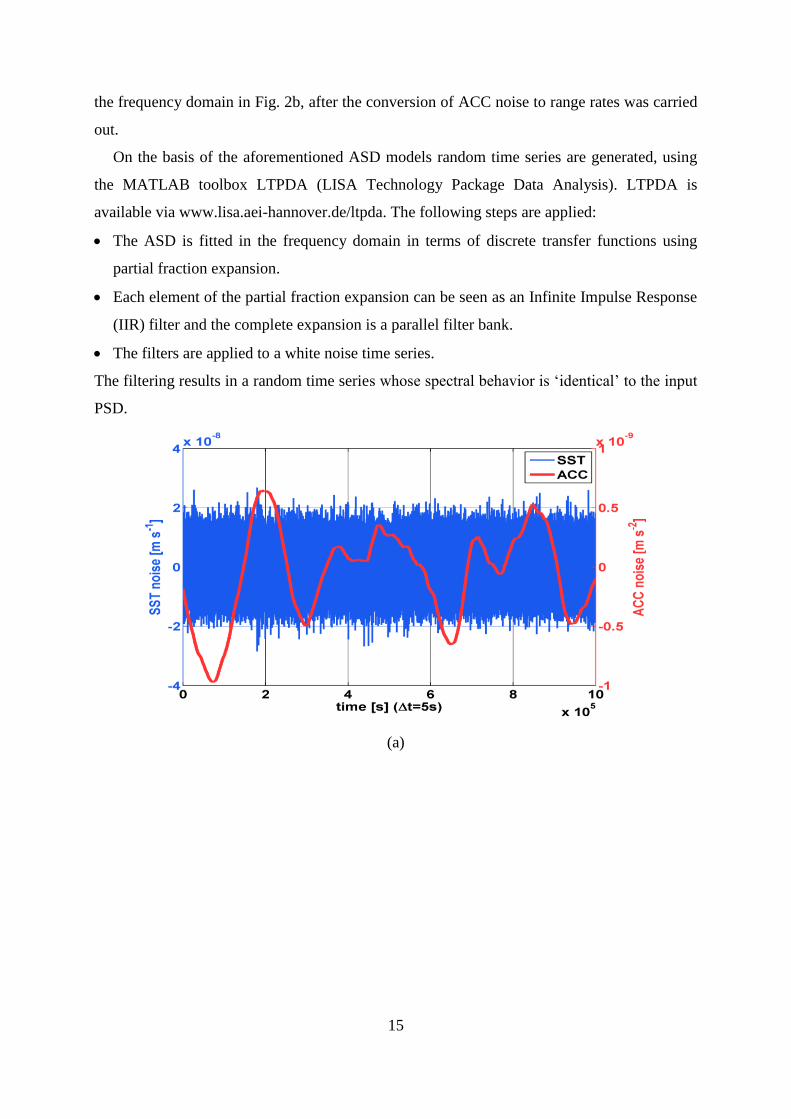
Fig. 2 shows the simulated colored SST and ACC noise time series (Fig. 2a) and their
amplitude spectral densities (Fig. 2b) generated for the In-line Bender mission scenario. From
Fig. 2a it is obvious that the high-frequency SST noise has a range of about ± 2 ∙ 10-8
m/s in
the time domain.
Colored noise from ACC sensor
The accelerometer noise model is derived from the ultra-sensitive axis of a GRADIO-type
sensor (Christophe et al. 2010), an accelerometer as it was installed in the GOCE gradiometer.
Christophe et al. (2010) modeled noise contributions from: detector, action, measure, parasitic
and thermal noise. The resulting total noise is colored noise (Fig. 2b) which is used for ACC
sensors of all mission scenarios except for GRACE. For the GRACE case we use the
performance as derived from real data in Gerlach et al. (2005) as
9
2
mASD PSD 9.8 10
s Hz
. [7]
ACC noise is converted from range-accelerations to range-rates in order to be comparable to
SST noise (Fig. 2b). This implies a multiplication with factor f21 , which leads to a tilting
of the ASD in the frequency domain.
Our full-scale simulations assume that each satellite is equipped with a three-axis
accelerometer, whose axes share the same high sensitivity as shown in Fig. 2a. The resulting
ASD of the simulated colored ACC noise (including a safety factor of 2) is illustrated for the
example of the In-line Bender mission scenario in Fig. 2b. From Fig. 2a the low-frequency
ACC noise is clearly visible, amounting to a noise level of about ± 0.5 ∙ 10-9
m/s2.
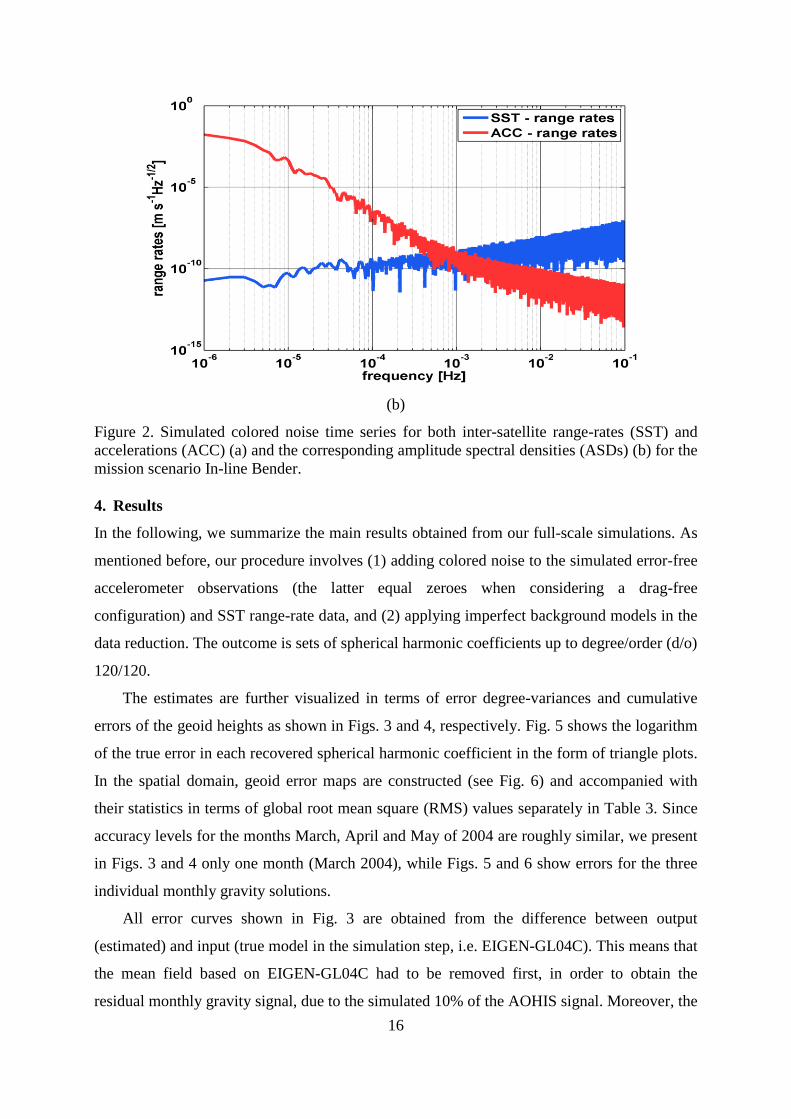
In Fig. 2a the ACC noise is given in range-acceleration (axis on the right) whereas SST
noise is given in range-rate (axis on the left). The noise components are comparable only in
15
the frequency domain in Fig. 2b, after the conversion of ACC noise to range rates was carried
out.
On the basis of the aforementioned ASD models random time series are generated, using
the MATLAB toolbox LTPDA (LISA Technology Package Data Analysis). LTPDA is
available via www.lisa.aei-hannover.de/ltpda. The following steps are applied:
The ASD is fitted in the frequency domain in terms of discrete transfer functions using
partial fraction expansion.
Each element of the partial fraction expansion can be seen as an Infinite Impulse Response
(IIR) filter and the complete expansion is a parallel filter bank.
The filters are applied to a white noise time series.
The filtering results in a random time series whose spectral behavior is ‘identical’ to the input
PSD.
(a)
16
(b)
Figure 2. Simulated colored noise time series for both inter-satellite range-rates (SST) and
accelerations (ACC) (a) and the corresponding amplitude spectral densities (ASDs) (b) for the
mission scenario In-line Bender.
4. Results
In the following, we summarize the main results obtained from our full-scale simulations. As
mentioned before, our procedure involves (1) adding colored noise to the simulated error-free
accelerometer observations (the latter equal zeroes when considering a drag-free
configuration) and SST range-rate data, and (2) applying imperfect background models in the
data reduction. The outcome is sets of spherical harmonic coefficients up to degree/order (d/o)
120/120.
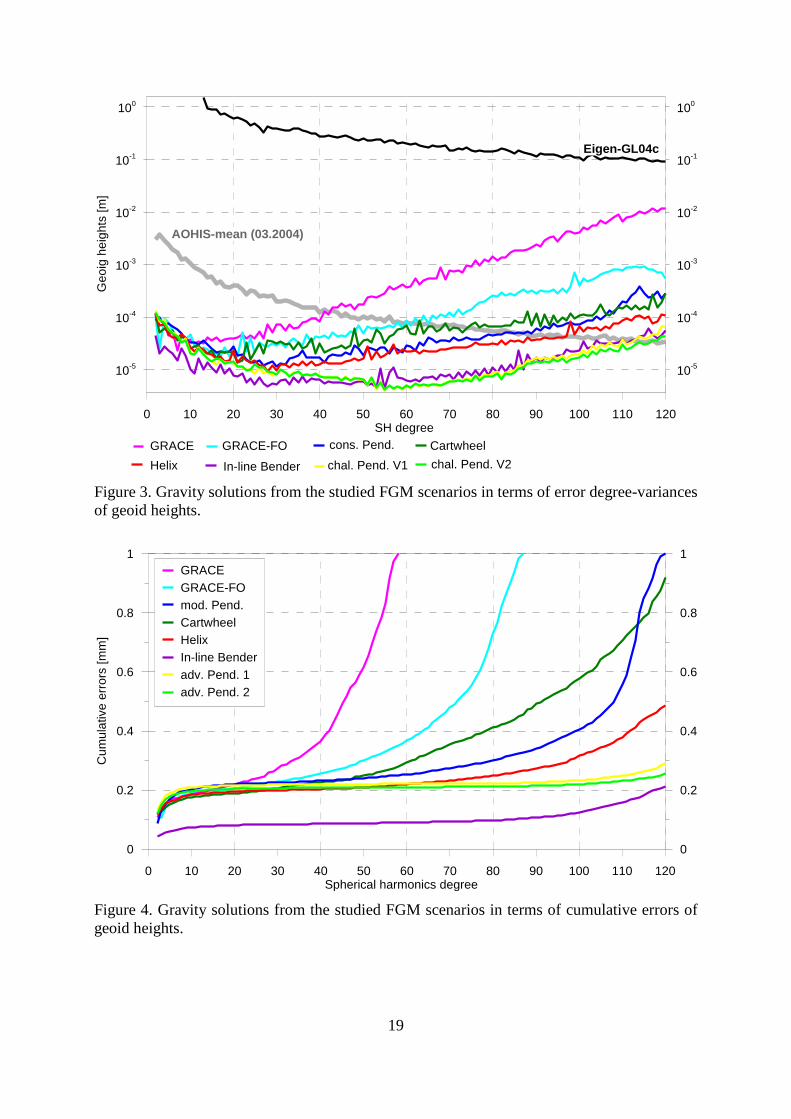
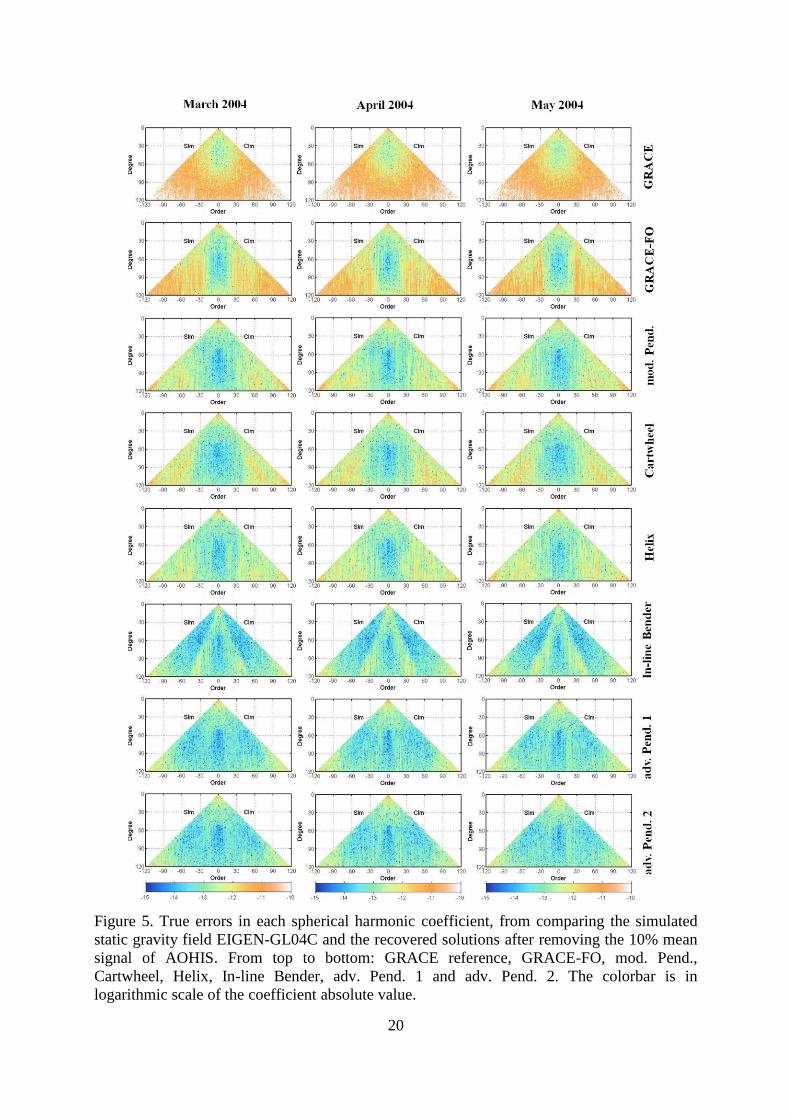
The estimates are further visualized in terms of error degree-variances and cumulative
errors of the geoid heights as shown in Figs. 3 and 4, respectively. Fig. 5 shows the logarithm
of the true error in each recovered spherical harmonic coefficient in the form of triangle plots.
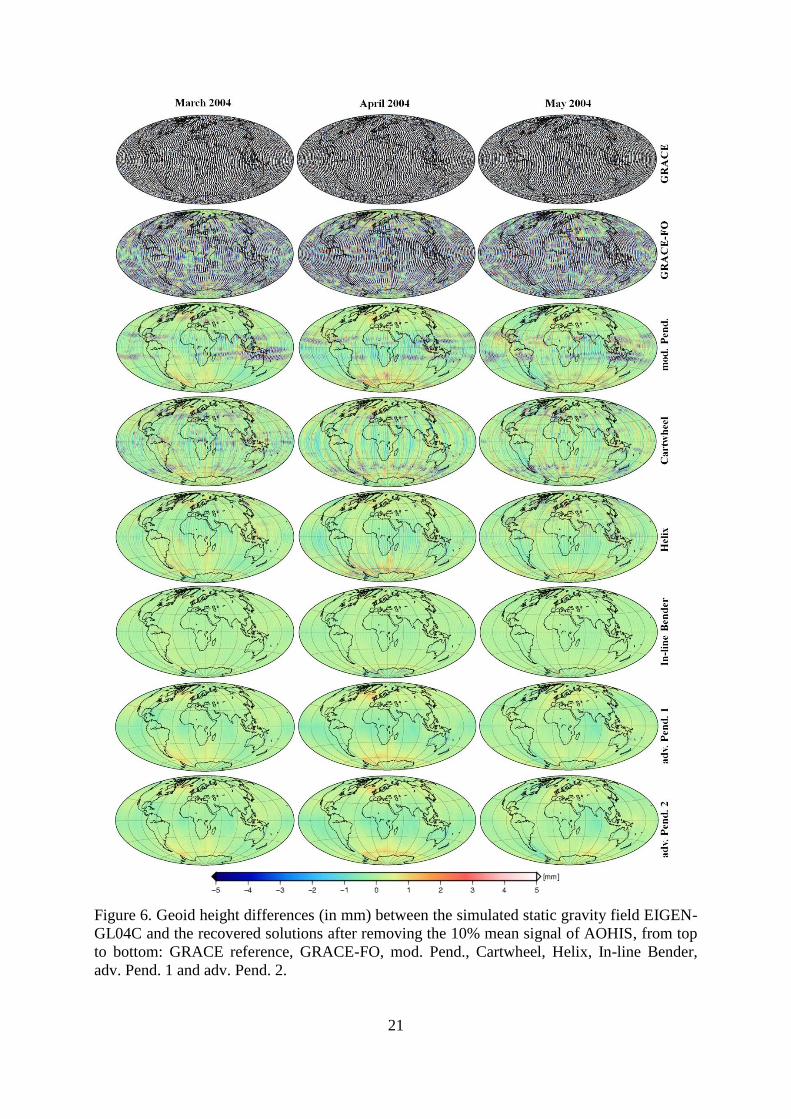
In the spatial domain, geoid error maps are constructed (see Fig. 6) and accompanied with
their statistics in terms of global root mean square (RMS) values separately in Table 3. Since
accuracy levels for the months March, April and May of 2004 are roughly similar, we present
in Figs. 3 and 4 only one month (March 2004), while Figs. 5 and 6 show errors for the three
individual monthly gravity solutions.
All error curves shown in Fig. 3 are obtained from the difference between output
(estimated) and input (true model in the simulation step, i.e. EIGEN-GL04C). This means that
the mean field based on EIGEN-GL04C had to be removed first, in order to obtain the
residual monthly gravity signal, due to the simulated 10% of the AOHIS signal. Moreover, the
17
mean signal of this 10% AOHIS field needs to be subtracted from the monthly recovered
solution in order to assess the error level of each satellite; resulting mainly from simulated
instrument noise and aliasing effects (see Figs. 5 and 6).
As expected, the estimated solutions for all alternative FGM scenarios perform
approximately one to two orders of magnitude better than the GRACE reference solution,
especially at the short wavelength range as seen in Fig. 3. The reason is that they add
measurement information in cross-track and/or radial directions. This becomes apparent in
Fig. 5, which shows the error of each spherical harmonic coefficient. Additionally, the lower
orbital height and the improved sensors of all alternative FGMs, when compared to GRACE,
increase the signal-to-noise ratio and hence provide significant improvements.
North-south striping pattern still contaminates gravity recovery with our GRACE-FO
mission as seen in Fig. 6. However, the small cross-track component, besides the lower orbital
height and the laser instrument implemented in the GRACE-FO (see Table 1) formation
helped in reducing the aliasing errors by one order of magnitude w.r.t. the GRACE reference
solution, which displays a stronger striping pattern, as expected. As seen in Fig. 3, GRACE-
FO provides improvements at short wavelengths by a factor of about 10 (see also Table 3).
Increasing the cross-track inter-satellite separation angle, from 7° in case of the GRACE-FO
mission to 25° in case of the “mod. Pend.” mission, also improves the recovery; global errors
associated with the GRACE-FO solution could be reduced with the mod. Pend. solution (see
Fig. 6).
Besides the configurations which include a cross-track component, also the Cartwheel
and Helix mission scenarios which contain radial information perform better than the
GRACE-FO mission. The Helix solution provides a lower cumulative geoid error level for all
three months compared to the “mod. Pend.” and Cartwheel scenarios. The reason is likely that
the Helix-measured range-rate is the only observable we considered that senses in all three
space directions.
As may be expected, the best overall solutions for all cases are obtained by using more
than one pair of satellites that conduct SST via the In-line Bender configuration (see Table 3).
The error curve of the In-line Bender configuration crosses the mean signal of the AOHIS
temporal field at d/o 110 (see Fig. 3), meaning that the In-line Bender configuration would not
only be able to reduce aliasing errors but also to resolve the temporal signal better. From Fig.
6, it becomes obvious as well that the In-line Bender solution provides the most isotropic
error distribution and least errors especially in the long wavelengths across all considered
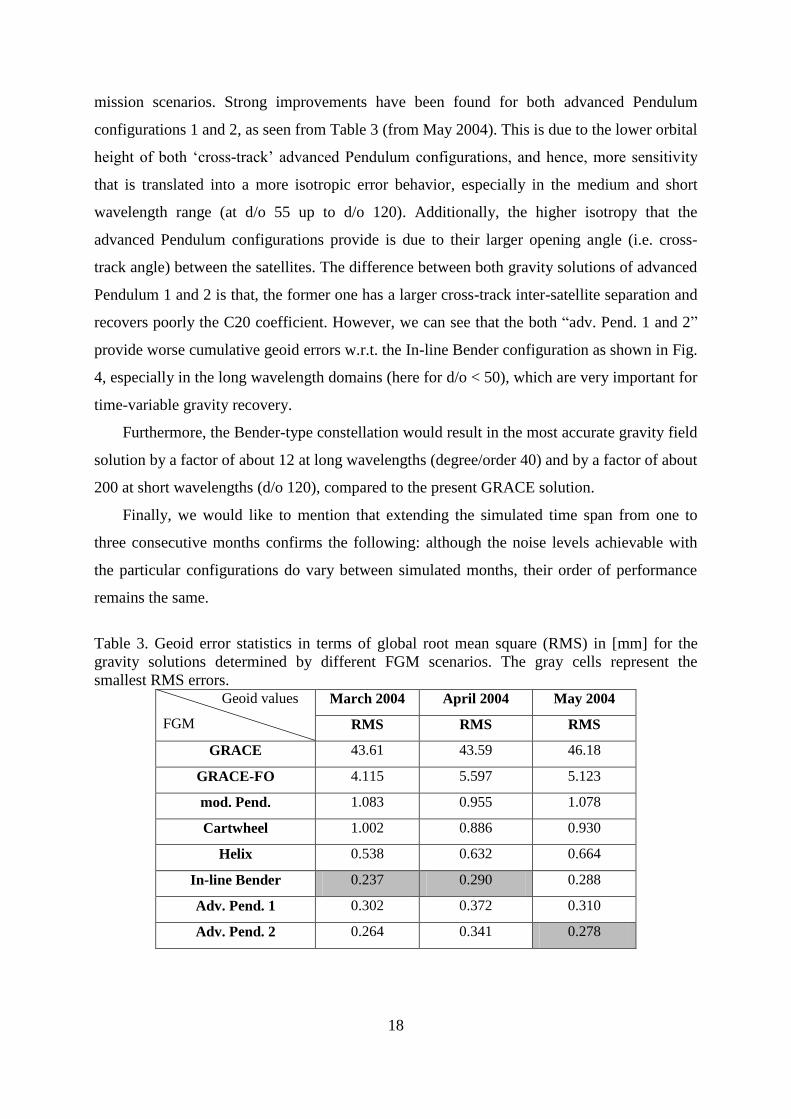
18
mission scenarios. Strong improvements have been found for both advanced Pendulum
configurations 1 and 2, as seen from Table 3 (from May 2004). This is due to the lower orbital
height of both ‘cross-track’ advanced Pendulum configurations, and hence, more sensitivity
that is translated into a more isotropic error behavior, especially in the medium and short
wavelength range (at d/o 55 up to d/o 120). Additionally, the higher isotropy that the
advanced Pendulum configurations provide is due to their larger opening angle (i.e. cross-
track angle) between the satellites. The difference between both gravity solutions of advanced
Pendulum 1 and 2 is that, the former one has a larger cross-track inter-satellite separation and
recovers poorly the C20 coefficient. However, we can see that the both “adv. Pend. 1 and 2”
provide worse cumulative geoid errors w.r.t. the In-line Bender configuration as shown in Fig.
4, especially in the long wavelength domains (here for d/o < 50), which are very important for
time-variable gravity recovery.
Furthermore, the Bender-type constellation would result in the most accurate gravity field
solution by a factor of about 12 at long wavelengths (degree/order 40) and by a factor of about
200 at short wavelengths (d/o 120), compared to the present GRACE solution.
Finally, we would like to mention that extending the simulated time span from one to
three consecutive months confirms the following: although the noise levels achievable with
the particular configurations do vary between simulated months, their order of performance
remains the same.
Table 3. Geoid error statistics in terms of global root mean square (RMS) in [mm] for the
gravity solutions determined by different FGM scenarios. The gray cells represent the
smallest RMS errors. Geoid values
FGM
March 2004 April 2004 May 2004
RMS RMS RMS
GRACE 43.61 43.59 46.18
GRACE-FO 4.115 5.597 5.123
mod. Pend. 1.083 0.955 1.078
Cartwheel 1.002 0.886 0.930
Helix 0.538 0.632 0.664
In-line Bender 0.237 0.290 0.288
Adv. Pend. 1 0.302 0.372 0.310
Adv. Pend. 2 0.264 0.341 0.278
19
0 10 20 30 40 50 60 70 80 90 100 110 120SH degree
10-5
10-4
10-3
10-2
10-1
100
Ge
oig
he
ights
[m
]
10-5
10-4
10-3
10-2
10-1
100
GRACE GRACE-FO cons. Pend. Cartwheel
Helix In-line Bender chal. Pend. V1 chal. Pend. V2
AOHIS-mean (03.2004)
Eigen-GL04c
Figure 3. Gravity solutions from the studied FGM scenarios in terms of error degree-variances
of geoid heights.
0 10 20 30 40 50 60 70 80 90 100 110 120Spherical harmonics degree
0
0.2
0.4
0.6
0.8
1
Cu
mula
tive e
rro
rs [m
m]
0
0.2
0.4
0.6
0.8
1
GRACE
GRACE-FO
mod. Pend.
Cartwheel
Helix
In-line Bender
adv. Pend. 1
adv. Pend. 2
Figure 4. Gravity solutions from the studied FGM scenarios in terms of cumulative errors of
geoid heights.
20
Figure 5. True errors in each spherical harmonic coefficient, from comparing the simulated
static gravity field EIGEN-GL04C and the recovered solutions after removing the 10% mean
signal of AOHIS. From top to bottom: GRACE reference, GRACE-FO, mod. Pend.,
Cartwheel, Helix, In-line Bender, adv. Pend. 1 and adv. Pend. 2. The colorbar is in
logarithmic scale of the coefficient absolute value.
21
Figure 6. Geoid height differences (in mm) between the simulated static gravity field EIGEN-
GL04C and the recovered solutions after removing the 10% mean signal of AOHIS, from top
to bottom: GRACE reference, GRACE-FO, mod. Pend., Cartwheel, Helix, In-line Bender,
adv. Pend. 1 and adv. Pend. 2.
22
5. Conclusion
In the course of this contribution, we have provided an assessment of seven candidate
scenarios for a future gravity mission based on full-scale simulations, which consist of
forward simulation by GFZ EPOS software, backward simulation by IGG GROOPS software,
and include the consideration of realistic colored accelerometer and ranging noise and
background model errors.
In line with earlier studies, we conclude that the gravity recovery improves significantly
in terms of the error levels and more isotropic noise distribution if moderate cross-track
and/or radial components are added to the SST observable. This is in principle possible by a
variety of formations, i.e. satellite pairs that orbit the Earth in alternative configurations.
We have also found that extending the simulated time span from one to three consecutive
months improves the robustness of the performance assessments, in a way that though the
noise levels of the particular configurations are varying between simulated months, their order
of performance remains the same.
We can confirm earlier findings that the GRACE formation is sub-optimal in terms of the
gravity field recovery. We find that simulation results are to some extent sensitive with
respect to the particular ‘monthly noise model’. This may explain a part of the differences
seen in the growing literature on simulation studies. It also means that such studies should be
based on longer simulated data sets.
The best performance of the investigated single formations was obtained by the advanced
pendulums, however an accuracy reduced by about 2-4 times in the important long-
wavelength part of the spectrum (for spherical harmonic degrees < 50), compared to the
Bender mission, can be observed.
Concerning state-of-the-art mission constraints, in particular the severe restriction of
heterodyne lasers on maximum range-rates, only the moderate Pendulum and the Bender-
mission are beneficial options, of course in addition to GRACE and GRACE-FO. Here, the
moderate pendulum shows the best performance of the considered single formation missions
with a significant gain of up to one order of magnitude (and more) compared to GRACE and
GRACE-FO. Again, as mentioned before, the Bender constellation, though economically
likely much more challenging shows the best performance of all missions. It would
outperform the moderate pendulum by more than half an order of magnitude, and would
indeed result in a significantly improved solution in the short and medium spectral range, with
23
a geoid accuracy better than 1 mm when spherical harmonic expansion up to degree 120 is
considered.
Depending on the available budget and technological progress we suggest the following
missions for future realisation:
- if the budget allows for the launch of two satellite pairs, the Bender constellation is
suggested. Furthermore, this mission seems feasible concerning technological issues (i.e. two
inline formations)
- if the budget allows only for the launch of one pair, a pendulum is proposed. Depending
on the technological progress, e.g. in laser technology, system and satellite design, the
maximum pendulum angle can be chosen.
Acknowledgements:
The authors would like to thank the reviewers for their valuable comments. We gratefully
acknowledge Dr. Pavel Ditmar, the Editor, for his valuable comments and corrections to
improve this manuscript. Additionally, the financial support of the German Federal Ministry
for Education and Research (BMBF) and the German Research Foundation (DFG) within the
frame work of the German joint research project “Concepts for future gravity field satellite
missions” as part of the Geotechnologies Program (grant 03G0729) is acknowledged.
References
Anselmi, A., Cesare, S., Visser, P., Van Dam, T., Sneeuw, N., Gruber, T., Altes, B.,
Christophe, B., Cossu, F., Ditmar, P., Murboeck, M., Parisch, M., Renard, M., Reubelt,
T., Sechi, G. and Texieira Da Encarnacao, JG. (2011) Assessment of a next generation
gravity mission to monitor the variations of Earth’s gravity field. ESA Contract No.
22643/09/NL/AF, Executive Summary, Thales Alenia Space report SD-RP-AI-0721, March
2011.
Bender, P. , Wiese, D. and Nerem, R. (2008) A possible dual-GRACE mission with 90
degree and 63 degree inclination orbits, paper presented at Third International Symposium on
Formation Flying, Eur. Space Agency, Noordwijk, Netherlands, 23–25 April.
Christophe, B., Marque, J.-P. and Foulon, B. (2010) Accelerometers for the ESA GOCE
Mission: one year of in-orbit results. Presentation at EGU 2010, Vienna, available on the ESA
GOCE website, http://earth.esa.int/pub/ESA_DOC/GOCE/Accelerometers for the ESA
GOCE Mission - one year of in-orbit results.pdf, Last accessed 24 September 2012
24
Coddington, I., Swann, W. C., Nenadovic, L. and Newbury, N. R. (2009) Rapid and
precise absolute distance measurements at long range. Nature Photonics Vol 3, 351–356,
doi:10.1038/nphoton.2009.94.
Elsaka, B. (2010) Simulated Satellite Formation Flights for Detecting the Temporal
Variations of the Earth’s Gravity Field. Ph.D. Dissertation, University of Bonn, Germany.
Elsaka, B., Kusche, J. and Ilk, K.-H. (2012) Recovery of the Earth’s gravity field from
formation-flying satellites: Temporal aliasing issues. Advances in Space Research, 50: 1534-
1552. doi.org/10.1016/j.asr.2012.07.016.
Elsaka, B. (2013) Sub-month Gravity Field Recovery from Simulated Multi-GRACE Mission
Type. Acta Geophysica (Accepted, Jul 2013).
Flechtner, F., Watkins, M., Morton, P. and Webb, F. (2013): Status of the GRACE
Follow-on Mission. Proceedings of the International Association of Geodesy Symposia
Gravity, Geoid and Height System (GGHS2012), 9.-11.10.2012, Venice, Italy, IAGS-D-12-
00141 (accepted).
Förste, C., Schmidt, R., Stubenvoll, R., Flechtner, F., Meyer, U., Koenig, R., Neu-mayer,
H., Biancale, R., Lemoine, J., Bruinsma, S., Loyer, S., Barthelmes, F. and Esselborn, S.
(2008) The GeoForschungsZentrum Potsdam/Groupe de Recherche de Ge-odesie Spatiale
satellite-only and combined gravity field models: EIGEN-GL04S1 and EIGEN-GL04C. J
Geod, 82, 6, 331-346, doi:10.1007/s00190-007-0183-8.
Gerlach. C., Flury, J., Frommknecht, B., Flechtner, F. and Rummel, R. (2005) GRACE
performance study and sensor analysis. Proceedings of the Joint CHAMP/GRACE Science
Meeting, GeoForschungsZentrum Potsdam, July 6-8, 2004, p.6.1, http://www-app2.gfz-
potsdam.de/pb1/JCG/Gerlach-etal_jcg.pdf.
Gruber, T., Bamber, J., Bierkens, M., Dobslaw, H., Murböck, M., Thomas, M., van
Beek, L., van Dam, T., Vermeersen, L.L.A. and Visser, P. (2011) Simulation of the time-
variable gravity field by means of coupled geophysical models. Earth System Science Data,
3:19–35, doi:10.5194/essd-3-19-2011.
Hedin, A. (1987) MSIS-86 Thermospheric Model. JGR, Vol. 92, No. A5, pp. 4649-4662,
doi:10.1029/JA092iA05p04649.
Iran Pour, S., Reubelt, T. and Sneeuw, N. (2013) Quality assessment of sub-Nyquist
recovery from future gravity satellite missions. Journal of Advances in Space Research
Volume 52, Issue 5, Pages 916–929.

25
Knocke, P., Ries, J. and Tapley, B. (1988) Earth Radiation Pressure Effects on Satellites.
Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Washington DC, 1988,
pp. 577-586.
Koch, K. R. (1997) Parameterschätzung und Hypothesentests. Dümmler, Bonn.
Koch, K. R. and Kusche, J. (2001) Regularization of geopotential determination from
satellite data by variance components. Journal of Geodesy, 76(5):641_652.
Kusche, J. (2002) A Monte-Carlo technique for weight estimation in satellite geodesy. J
Geod 76 (11), 641-652.
Lemoine, F., Kenyon, S., Factor, J., Trimmer, R., Pavlis, N., Cox, C., Klos-ko, S.,
Luthcke, S., Torrence, M., Wang, Y., Williamson, R., Pavlis, E., Rapp, R. and Olson, T.
(1998) The Development of the Joint NASA GSFC and the Na-tional Imagery and Mappping
Agency (NIMA) Geopotential Model EGM96. NASA/TP-1998-206861, July, 1998.
Mayer-Gürr, T., Ilk, K.-H., Eicker, A. and Feuchtinger, M. (2005) ITG-CHAMP01: A
CHAMP Gravitiy Field Model from Short Kinematical Arcs of a One-Year Observation
Period. Journal of Geodesy, 78:462-480.
Mayer-Gürr, T. (2006) Gravitationsfeldbestimmung aus der Analyse kurzer Bahnbögen am
Beispiel der Satellitenmissionen CHAMP und GRACE. Ph.D. Dissertation, University of
Bonn, Germany.
NG2 Team (2011) Assessment of a Next Generation Gravity Mission to Monitor the
Variations of Earth's Gravity Field. Final Report, ESTEC Contract No.: 22672/09/NL/AF.
Doc. No.: NG2-ASG-FR, Issue 1, 10 Oct. 2011.
Ray, R. (2008) GOT4.7 (private communication). Extension of Ray R (1999) A global ocean
tide model from Topex/Poseidon altimetry GOT99.2. NASA Tech Memo 209478, Sept. 1999.
Reubelt, T., Sneeuw, N. and Sharifi, M. (2010) Future Mission Design Options for Spatio-
Temporal Geopotential Recovery. In: Mertikas SP (ed) Gravity, Geoid and Earth Observation.
IAG Commission 2: Gravity Field, Chania, Crete, Greece, 23-27 June 2008. International
Association of Geodesy Symposia, Vol. 135, Springer.
Reubelt, T., Sneeuw, N. and Iran Pour, S. (2011) Quick-look gravity field analysis of
formation scenarios selection. In: Münch U, Dransch W (eds) Observation of the System
Earth from Space, GEOTECHNOLOGIEN Science Report No. 17, Status Seminar, 4 October
2010, Rheinische Friedrich Wilhelms Universität Bonn, Koordinierungsbüro
GEOTECHNOLOGIEN, Potsdam.
26
Reubelt, T., Sneeuw, N., Iran Pour, S., Hirth, M., Fichter, W., Müller, J., Brieden, Ph.,
Flechtner, F., Raimondo, J.-C., Kusche, J., Elsaka, B., Gruber, T., Pail, R., Murböck,
M., Doll, B., Sand, R., Wang, X., Klein, V., Lezius, M., Danzmann, K., Heinzel, G.,
Sheard, B., Rasel, E., Gilowski, M., Schubert, C., Schäfer, W., Rathke, A., Dittus, H. and
Pelivan, I. (2014): Future Gravity Field Satellite Missions. Flechtner, F., Sneeuw, N., Schuh,
W.-D. (Eds.), Observation of the System Earth from Space - CHAMP, GRACE, GOCE and
future missions. GEOTECHNOLOGIEN Science Report No. 20, Series "Advanced
Technologies in Earth Sciences", Springer, ISBN 978-3-642-32134-4 (in press 2014).
Savcenko, R. and Bosch, W. (2008) EOT08a – empirical ocean tide model from mul-ti-
mission satellite altimetry. Report No. 81, Deutsches Geodätisches Forschung-sinstitut
(DGFI), München.
Sharifi, M., Sneeuw, N., and Keller, W. (2007) Gravity Recovery capability of four generic
satellite formations. In Proc. Kilicoglu, A. and R. forsberg (Eds.), Gravity Field of the Earth.
General Command of Mapping, ISSN 1300-5790, Special issue 18, 211–216.
Sheard, B., Heinzel, G., Danzmann, K., Shaddock, D., Klipstein, W. and Folkner, W.
(2012) Intersatellite laser ranging instrument for the GRACE follow-on mission. Journal of
Geodesy, Vol. 86, Number 12, Page 1083.
Sneeuw, N., Sharifi, M., and Keller, W. (2008) Gravity Recovery from Formation Flight
Missions. Xu, Peiliang, Jingnan Liu and Athanasios Dermanis (Eds.), VI Hotine-Marussi
Symposium on Theoretical and Computational Geodesy, Vol. 132, Springer, Berlin
Heidelberg, 29–34.
Standish, E. M. (1998) JPL Planetary and Lunar Ephemerides, “DE405/LE405”. IOM 312.F-
98-048, August 26 1998.
van Dam, T., Visser, P., Sneeuw, N., Losch, M., Gruber, T., Bamber, J., Bierkens, M.
King, M. and Smit, M. (2008) Monitoring and Modelling Individual Sources of Mass
Distribution and Transport in the Earth System by Means of Satellites ESA-contract 20403,
Final Report.
Visser, P., Sneeuw, N., Reubelt, T., Losch, M. and van Dam, T. (2010) Space-borne
gravimetric satellite constellations and ocean tides: aliasing effects. Geophys. J. Int. (2010)
181, 789–805.
27
Wagner, C., McAdoo, D., Klokočník, J. and Kostelecký, J. (2006) Degradation of geo-
potential recovery from short repeat-cycle orbits: application to GRACE monthly fields. J
Geod 80(2):94–103.
Wiese, D., Folkner, W. and Nerem, R. (2009) Alternative mission architectures for a gravity
recovery satellite mission. Journal of Geodesy, 83, 569-581, DOI 10.1007/s00, 190-008-0274-
1.
Wiese, D., Nerem, R. and Han, S.-C. (2011) Expected improvements in determining
continental hydrology, ice mass variations, ocean bottom pressure signals, and earthquakes
using two pairs of dedicated satellites for temporal gravity recovery. Journal of Geophysical
Research, Vol. 116, B11 405, doi:10.1029/2011JB008375.
Wiese, D., Nerem, R. and Lemoine, F. (2012) Design considerations for a dedicated gravity
recovery satellite mission consisting of two pairs of satellites. Journal of Geodesy, 86:81-98,
DOI 10.1007/s00190-011-0493-8.