biological cybernetics
TRANSCRIPT

Biol. Cybern. 78, 119–132 (1998) BiologicalCyberneticsc© Springer-Verlag 1998
The generation of handwriting with delta-lognormal synergiesRejean Plamondon, Wacef Guerfali
Ecole Polytechnique de Montreal, Laboratoire Scribens, Departement de genie electrique et de genie informatique, C.P. 6079, Succursale Centre-Ville,Montreal QC H3C 3A7, Canada
Received: 22 July 1996 / Accepted in revised form: 15 September 1997
Abstract. This paper presents a handwriting generationmodel that takes advantage of the asymptotic impulse re-sponse of neuromuscular networks to produce and controlcomplex two-dimensional synergistic movements. A para-metric definition of a ballistic stroke in the context of thekinematic theory of rapid human movements is given. Twotypes of parameters are used: command and system param-eters. The first group provides a representation of the ac-tion plan while the second takes into account the tempo-ral properties of the neuromuscular systems executing thatplan. Handwriting is described as the time superimpositionof basic discontinuous strokes that results in a continuoussummation of delta-lognormal velocity vectors. The modelleads to trajectory reconstruction, both in the spatial andin the kinematic domain. According to this new paradigm,the angular velocity does not have to be controlled indepen-dently and continuously; it naturally emerges from the vecto-rial summation process. Several psychophysical phenomenarelated to two-dimensional movements are explained and an-alyzed in the context of the model: the speed/accuracy trade-offs, spatial scaling, the isochrony principle, the two-thirdspower law, effector independence, etc. The overall approachalso shows how basic handwriting characteristics (dimen-sion, slant, baseline, shape, etc.) are affected and controlledusing an action plan made up of virtual targets fed into aneuromuscular synergy that is governed by a delta-lognormallaw.
1 Introduction
Handwriting stands among the most complex tasks per-formed by literate human beings. It requires sensory-motorcontrol mechanisms involving a large spectrum of cerebralactivities, dealing with the emotions, rational thought andcommunication. As such, the study of handwriting consti-tutes a very broad field that allows researchers with variousbackgrounds and interests to collaborate and interact at mul-tiple levels with different but complementary objectives (see,for example, van Galen et al. 1991; Wann et al. 1991; vanGalen and Stelmach 1993; Plamondon 1993a, 1994, 1995a;
Faure et al. 1994; Simner et al. 1996). In this paper, weare interested in understanding handwriting generation at theglobal neuromuscular level, focusing mainly on the devel-opment of a stroke generation model that is general enoughto explain the origin of some basic psychophysical laws ofsimple human movements and to show how human subjectscan take advantage of the knowledge that emerges from theproperties of this representation to control the sensory-motorinteractions involved in the generation of more complex tra-jectories. The overall approach is based upon the hypothesisthat complex human movements are made up of, and canbe segmented into, basic and simple units. In other words,due to the intrinsic properties of the neuromuscular systeminvolved in a rapid writing task, there is a class of simplemovements, hereafter called strokes, that are preferentiallyproduced by such a system, once it is well-trained. Morecomplex movements are thus generated by the vectorial ad-dition of the various strokes belonging to such a class.
The concept of a ballistic or a fundamental unit of hu-man movement is not new. It originated in the Lashley ex-periments (Lashley 1917) and was adapted to the analysisof handwriting in the 1960s (Eden 1962; Denier van derGon and Thuring 1965, etc.). Similarly, the idea of overlap-ping instead of concatenating discontinuous strokes to studyhandwriting was put forward by Morasso and Mussa Ivaldi(1982) in the early 1980s. These concepts have been amongthe cornerstones upon which numerous handwriting gener-ation models have been built (see Plamondon and Maarse1989, for a review of the models published prior to 1989;Schomaker et al. 1989; Bullock et al. 1993; Morasso andSanguinetti 1993; Morasso et al. 1994; Stettiner and Chazan1994; Singer and Tishby 1994).
Although these models have been developed for differ-ent purposes with different practical or theoretical goals inmind, the majority of their authors were aiming at generat-ing human-like handwriting. When a systematic comparisonof these models is performed using real handwritten data, itis clear that some models perform better than others (Plam-ondon et al. 1993; Alimi and Plamondon 1993, 1994). Thisdoes not mean, however, that a model cannot be useful fora specific application, if its output is not as realistic as thatof another model. The decision to use a model always de-

120
pends on the goal of the research project. For example, thedesign requirements are very different if one is developingan interactive system to help children learn handwriting or ifone is interested in segmenting letters for pattern recognitionpurposes.
In this paper, our objective is to use the kinematic theoryof rapid human movements (Plamondon 1993c,d, 1995b,c,1996, 1997a) to analyze and understand handwriting gener-ation and control. The kinematic theory describes the globalproperties of the neuromuscular networks involved in a syn-ergistic action. In a single framework, it explains the originof the basic kinematic relationships and psychophysical lawsthat have been consistently reported in studies dealing withrapid human movements (Plamondon and Alimi 1996; Pla-mondon 1997b). This paper shows how the same approachcan be used and generalized to study and to understand thebasic properties of pentip trajectories as produced by hu-man subjects performing a writing task (Plamondon 1995d;Plamondon and Guerfali 1996b).
This article deals with three major themes. First, inSect. 2, we summarize the neuromuscular model that emergesfrom the kinematic theory and use it to describe the basicproperties of a single stroke. Then, in Sect. 3, the gener-ation of handwriting is studied in the context of a vecto-rial delta-lognormal model (Plamondon 1995d). Multi-strokemovements like letter and word production are investigated(Guerfali and Plamondon 1995a, b; Guerfali 1996). Theoret-ical and practical considerations concerning the quantitativeuse of this new model to analyze and synthesize handwritingare also examined. Finally, in Sects. 4 and 5, some basic psy-chophysical properties often reported in handwriting studiesare predicted using computer simulations. In addition, theglobal perspective provided by this new approach is com-pared with those of other models previously published.
2 Stroke generation model
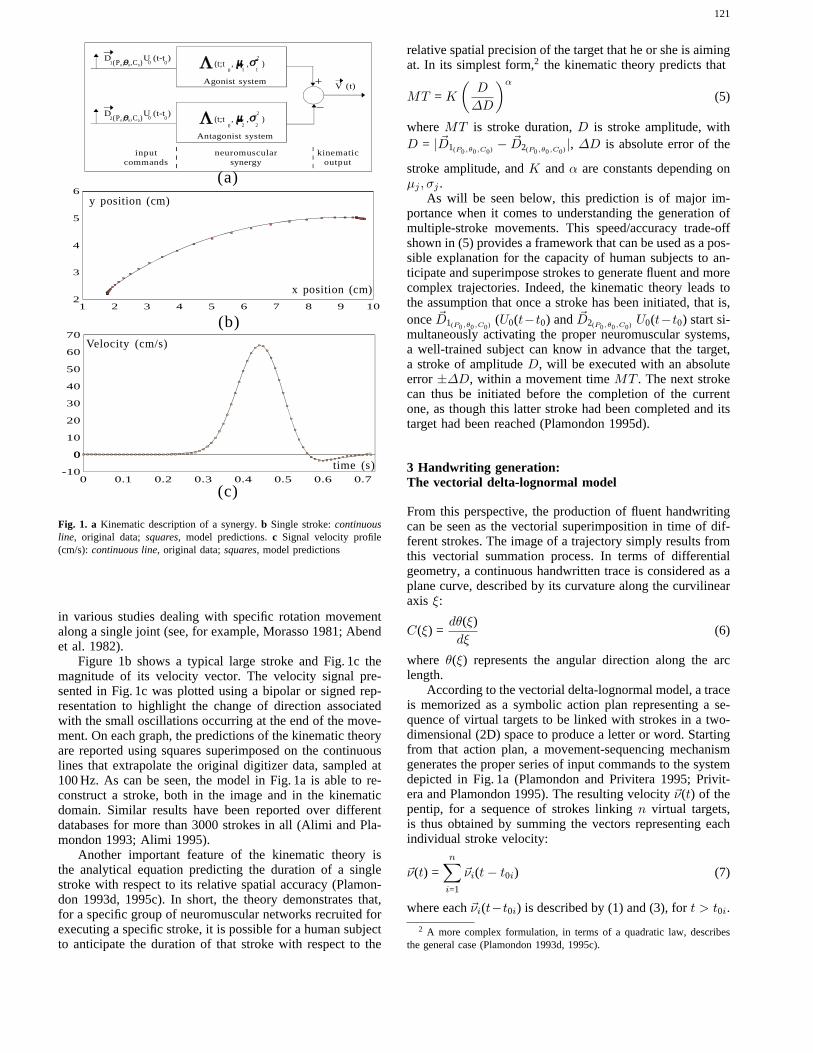
Figure 1a schematizes the global features of the stroke gen-eration model that results from the kinematic theory (Pla-mondon 1995d). According to this scheme, a stroke is pro-duced by the synergistic control of the pentip velocity~ν(t).This is achieved by synchronously activating two global neu-romuscular systems, one agonist and the other antagonist,that control the end-effector movement around a generalizedjoint. Each system has an impulse response, asymptoticallydescribed by a lognormal functionΛ(t; t0, µ, σ2) (Plamon-don 1991, 1993b, 1995b,c). These two systems constitutea neuromuscular synergy that produces, from a given ini-tial postureP0, a stroke along a circular path of curvatureC0 around the generalized joint, in a given initial directionθ0. To execute this basic movement, two input commands~D1(P0,θ0,C0)U0(t− t0) and ~D2(P0,θ0,C0)U0(t− t0) are fed simul-taneously into the agonist and antagonist systems, at a giventime t0. Each of these two systems reacts to its specific inputwith a lognormal impulse response in a logtime delayµ1 or
µ2, and with a logresponse time ofσ1 or σ2 respectively(Plamondon 1993c, 1995d).1
In this context, a stroke executed from an arbitrary start-ing positionP0 is characterized by nine parameters. At theaction plan level,C0 and θ0 reflect the global geometricproperties of the set of muscles and joints recruited to ex-ecute the movement, whereas the parametersD1, D2 andt0 provide a synthetic description of the input commands.The parametersµ1, µ2, σ1 and σ2 describe the global tim-ing properties of the neuromuscular networks involved ingenerating the movement. In other words, the different pa-rameters take a single specific value for a given stroke, but,in practice, these parameters can be considered as randomvariables with specific distributions. Analyzing a set of simi-lar strokes should highlight the statistical properties of thesedistributions.
The key feature of a single stroke is that the magnitudeof its velocity |~ν(t)|, often referred to as curvilinear velocity,along the circular path is described by (Plamondon 1993c,1995b):
|~ν(t)| =∣∣∣ ~D1(P0,θ0,C0)Λ(t; t0, µ1, σ
21)
− ~D2(P0,θ0,C0)Λ(t; t0, µ2, σ22)∣∣∣ (1)
where
Λ(t; t0, µjσ2j )
=1
σj
√2π(t − t0)
exp
(−[ln(t − t0) − µj ]2
2σ2j
)(2)
with t > t0.This latter expression has been shown to be the best
descriptor of individual stroke velocity profiles out of 26different models tested over the same database (Plamondonet al. 1993; Alimi and Plamondon 1993, 1994). It also in-corporates in its formulation all the global characteristicsof rapid movements, from basic kinematic and kinetic rela-tionships to speed/accuracy trade-offs (Plamondon 1993c,d,1995b,c, 1996, 1997a; Plamondon and Alimi 1997; Plamon-don 1997b).
The direction of the stroke velocity (∠(~ν(t)) with respectto any arbitrary reference can be described as a function oftime by:
∠~ν(t) = θ(t) = θ0 + C0
∫ t
t0
|~ν(τ )|dτ (3)
and its first derivative as a function of time (often referredto as the angular velocity (Plamondon 1987, 1989a, 1992)gives
νθ(t) =dθ(t)dt
= C0|~ν(t)| (4)
This latter expression (4) shows that, for a single cir-cular stroke, the amplitude of the angular velocity also hasan ‘asymmetric bell-shaped velocity profile’ described by adelta-lognormal law. This is consistent with the data reported
1 The parametersµ and σ are temporal parameters that represent theglobal time delay and the response time of a neuromuscular network ona logarithmic time scale. We use the terms logtime delay and logresponsetime to point out this scaling effect (Plamondon 1993c, 1995b, 1997b).
121
1 2 3 4 5 6 7 8 9 102
3
4
5
6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0
10
20
30
40
50
60
70
0
-10
(t;t , , )0 1 1
2
(t;t , , )0 2 2
2(P0, 0,C0) 02 0
D U (t-t )
(P0, 0,C0) 01 0D U (t-t )
V (t)+
_
Agonist system
Antagonist system
inputcommands
neuromuscularsynergy
kinematicoutput
(a)
(b)
(c)
Velocity (cm/s)
time (s)
y position (cm)
x position (cm)
Fig. 1. a Kinematic description of a synergy.b Single stroke:continuousline, original data;squares, model predictions.c Signal velocity profile(cm/s):continuous line, original data;squares, model predictions
in various studies dealing with specific rotation movementalong a single joint (see, for example, Morasso 1981; Abendet al. 1982).
Figure 1b shows a typical large stroke and Fig. 1c themagnitude of its velocity vector. The velocity signal pre-sented in Fig. 1c was plotted using a bipolar or signed rep-resentation to highlight the change of direction associatedwith the small oscillations occurring at the end of the move-ment. On each graph, the predictions of the kinematic theoryare reported using squares superimposed on the continuouslines that extrapolate the original digitizer data, sampled at100 Hz. As can be seen, the model in Fig. 1a is able to re-construct a stroke, both in the image and in the kinematicdomain. Similar results have been reported over differentdatabases for more than 3000 strokes in all (Alimi and Pla-mondon 1993; Alimi 1995).
Another important feature of the kinematic theory isthe analytical equation predicting the duration of a singlestroke with respect to its relative spatial accuracy (Plamon-don 1993d, 1995c). In short, the theory demonstrates that,for a specific group of neuromuscular networks recruited forexecuting a specific stroke, it is possible for a human subjectto anticipate the duration of that stroke with respect to the
relative spatial precision of the target that he or she is aimingat. In its simplest form,2 the kinematic theory predicts that
MT = K
(D
∆D
)α
(5)
whereMT is stroke duration,D is stroke amplitude, withD = | ~D1(P0,θ0,C0) − ~D2(P0,θ0,C0) |, ∆D is absolute error of the
stroke amplitude, andK andα are constants depending onµj , σj .
As will be seen below, this prediction is of major im-portance when it comes to understanding the generation ofmultiple-stroke movements. This speed/accuracy trade-offshown in (5) provides a framework that can be used as a pos-sible explanation for the capacity of human subjects to an-ticipate and superimpose strokes to generate fluent and morecomplex trajectories. Indeed, the kinematic theory leads tothe assumption that once a stroke has been initiated, that is,once~D1(P0,θ0,C0) (U0(t−t0) and ~D2(P0,θ0,C0) U0(t−t0) start si-multaneously activating the proper neuromuscular systems,a well-trained subject can know in advance that the target,a stroke of amplitudeD, will be executed with an absoluteerror ±∆D, within a movement timeMT . The next strokecan thus be initiated before the completion of the currentone, as though this latter stroke had been completed and itstarget had been reached (Plamondon 1995d).
3 Handwriting generation:The vectorial delta-lognormal model
From this perspective, the production of fluent handwritingcan be seen as the vectorial superimposition in time of dif-ferent strokes. The image of a trajectory simply results fromthis vectorial summation process. In terms of differentialgeometry, a continuous handwritten trace is considered as aplane curve, described by its curvature along the curvilinearaxis ξ:
C(ξ) =dθ(ξ)dξ
(6)
where θ(ξ) represents the angular direction along the arclength.
According to the vectorial delta-lognormal model, a traceis memorized as a symbolic action plan representing a se-quence of virtual targets to be linked with strokes in a two-dimensional (2D) space to produce a letter or word. Startingfrom that action plan, a movement-sequencing mechanismgenerates the proper series of input commands to the systemdepicted in Fig. 1a (Plamondon and Privitera 1995; Privit-era and Plamondon 1995). The resulting velocity~ν(t) of thepentip, for a sequence of strokes linkingn virtual targets,is thus obtained by summing the vectors representing eachindividual stroke velocity:
~ν(t) =n∑
i=1
~νi(t − t0i) (7)
where each~νi(t−t0i) is described by (1) and (3), fort > t0i.
2 A more complex formulation, in terms of a quadratic law, describesthe general case (Plamondon 1993d, 1995c).

122
The trajectory is planned from a given positionP0 with-out any reference to a specific axis system and the actionplan is invariant to rotation. The global orientation of thehandwritten trace is embedded in the sequence ofθ0i values.Depending on these geometric constraints, the neuromuscu-lar systems recruited for each stroke will respond more orless rapidly to the input commands, as reflected by the cor-responding values of the temporal parameters (µj , σj) of thesystems.
If the vectorial summation ofn strokes is analyzed andstudied in a specific cartesian reference system (as defined,for example, by a digitizer), the instantaneous magnitude anddirection of the velocity~ν(t) can be described by:
|~ν(t)| =
[
n∑i=1
νxi(t − t0i)
]2
+
[n∑
i=1
νyi(t − t0i)
]2
1/2
(8)
and
θ(t) = arctg
{∑ni=1 νyi(t − t0i)∑ni=1 νxi(t − t0i)
}(9)
where
νxi(t − t0i) = νi(t − t0i) cos(θi(t − t0i)) (10)
νyi(t − t0i) = νi(t − t0i) sin(θi(t − t0i)) (11)
andθi(t − t0i) is defined by (3).For the simple case where only two strokes are activated
at timest01 and t02 respectively, (7) and (8) reduce to
|~ν(t)|=√
ν21(t−t01)−ν2
2(t−t02)+2ν1(t−t01)ν2(t−t02) cos(∆θ(t)) (12)
where
∆θ(t) = θ1(t − t01) − θ2(t − t02) (13)
and
∠~ν(t) =θ(t) = arctg{
ν1(t−t01) sin(θ1(t−t01))+ν2(t−t02) sin(θ2(t−t02))ν1(t−t01) cos(θ1(t−t01))+ν2(t−t02) cos(θ2(t−t02))
}(14)
= arctg(
f (t)g(t)
)(15)
As can be seen, even in this simple case, the angularvelocity νθ(t), as obtained from the time derivative ofθ(t),is a rather complex analytical formula linking the specificcartesian components of each individual stroke velocity:
νθ(t) =df (t)dt g(t) − f (t)dg(t)
dt
f2(t) + g2(t)(16)
where
df (t)dt
=dν1(t − t01)
dtsin(θ1(t − t01))
+C01ν21(t − t01) cos(θ1(t − t01))
+dν2(t − t02)
dtsin(θ2(t − t02))
+C02ν22(t − t02) cos(θ2(t − t02)) (17)
dg(t)dt
=dν1(t − t01)
dtcos(θ1(t − t01))
−C01ν21(t − t01) sin(θ1(t − t01))
+dν2(t − t02)
dtcos(θ2(t − t02))
−C02ν22(t − t02) sin(θ2(t − t02)) (18)
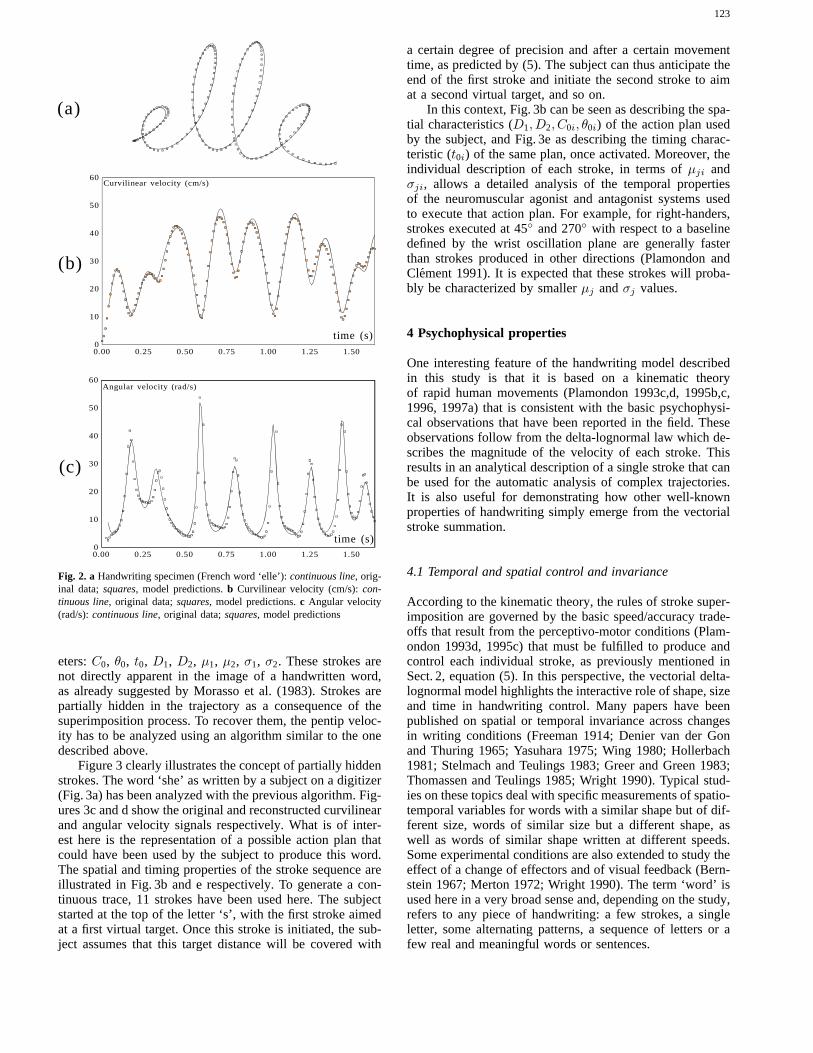
Using (12), (16) and (6) for each stroke, the completekinematics of a 2D trajectory can be recovered, as can thepentip position with respect to any arbitrary postural refer-enceP0. Figure 2 shows how the French word ‘elle’ (‘she’in English), as generated by a human subject, can be re-constructed using the vectorial delta-lognormal model. Hereagain, squares represent model predictions, and the continu-ous lines the interpolation of real data, sampled at 100 Hz. Ascan be seen, the vectorial summation of time-superimposedstrokes provides a realistic description of both the visualand the kinematic aspects of a word. In this example, themovement starts at rest (|~ν(t)| = 0) and the complex patternof the curvilinear velocity can be accounted for by addingdelta-lognormal velocity patterns (12). The angular veloc-ity as predicted by (16) shows a similar oscillatory pattern,with a phase shift of about 180◦ with respect to|~ν(t)|. Thisphase shift between angular and curvilinear velocity is im-plicit in the model, and is depicted in Figs. 3 and 4 as well.It simply emerges from the vectorial superimposition of dis-continuous strokes. This phenomenon has been reported formore than a century (Binet and Courtier 1893; Jack 1895)and been studied by numerous groups. Moreover, contraryto what has been assumed in the preliminary version of ourmodel (Plamondon 1987, 1989a, 1991, 1992), it is clear thatcontinuous control of the angular velocity is not necessaryto produce fluent handwriting (Plamondon 1995d; Guerfali1996).
There are several ways to perform the analysis-by-syn-thesis of a given handwritten trace (Plamondon and Guerfali1996b; Menier et al. 1997; Guerfali and Plamondon 1997).In this paper, we have used the following algorithm (Guerfali1996):
– compute the module and the direction of the curvilin-ear velocity from theX(t), Y (t) coordinates of a wordwritten on a digitizer,
– using the pen-paper contact information available fromthe digitizer, perform a first-level segmentation of theword into components, defined as the pentip traces pro-duced during a continuous pen-down signal,
– for each component, extract the partially hidden strokesby optimizing the matching of the curvilinear velocity,with a sum of delta-lognormal equations delayed in time,as well as matching the angular velocity curve that resultsfrom this vectorial addition of strokes,
– save the nine parameters that best represent each stroke.
Each handwritten component is thus made up of a setof strokesthat are superimposed in time to produce a flu-ent trace. According to the model, these strokes constitutethe basic units of human writing movements and serve asthe coding elements in the motor planning of complex tra-jectories. Each stroke is characterized by a velocity vector~ν(t) whose magnitude obeys the delta-lognormal law (1). Astroke is thus an arc of a circle characterized by nine param-
123
Curvilinear velocity (cm/s)
0.00 0.25 0.50 0.75 1.00 1.25 1.500
10
20
30
40
50
60
(a)
(b)
(c)
Angular velocity (rad/s)
0.00 0.25 0.50 0.75 1.00 1.25 1.500
10
20
30
40
50
60
time (s)
time (s)
Fig. 2. aHandwriting specimen (French word ‘elle’):continuous line, orig-inal data;squares, model predictions.b Curvilinear velocity (cm/s):con-tinuous line, original data;squares, model predictions.c Angular velocity(rad/s):continuous line, original data;squares, model predictions
eters:C0, θ0, t0, D1, D2, µ1, µ2, σ1, σ2. These strokes arenot directly apparent in the image of a handwritten word,as already suggested by Morasso et al. (1983). Strokes arepartially hidden in the trajectory as a consequence of thesuperimposition process. To recover them, the pentip veloc-ity has to be analyzed using an algorithm similar to the onedescribed above.
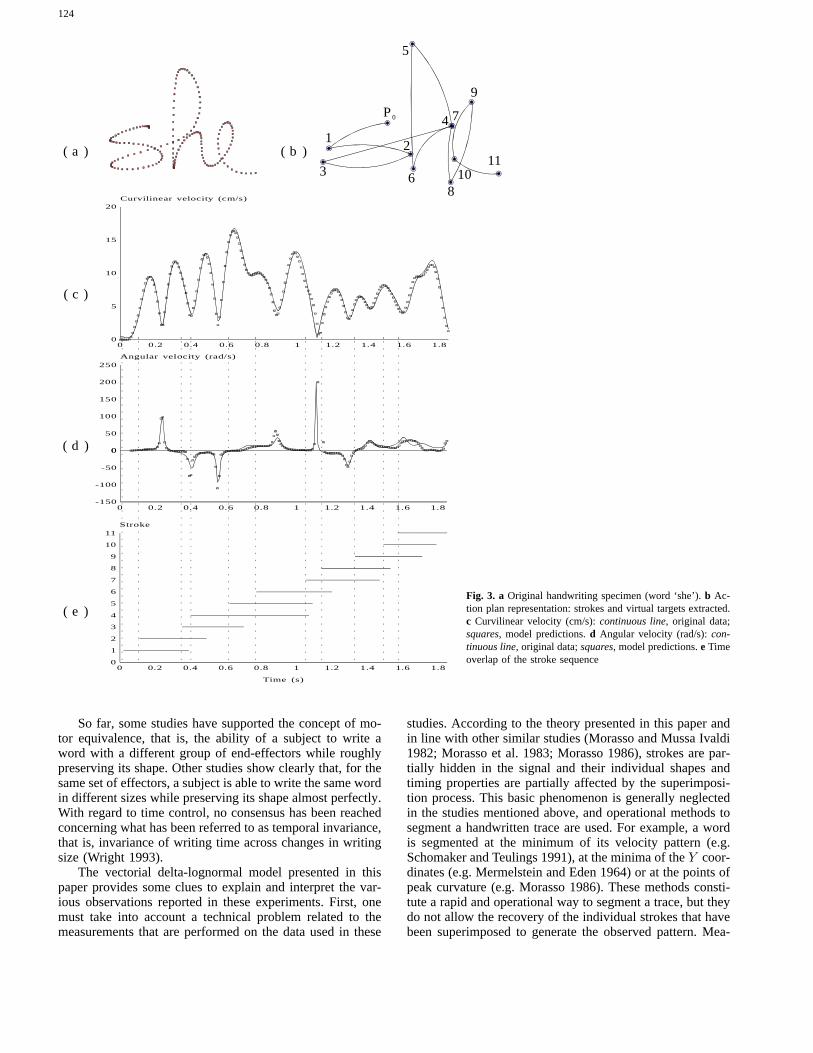
Figure 3 clearly illustrates the concept of partially hiddenstrokes. The word ‘she’ as written by a subject on a digitizer(Fig. 3a) has been analyzed with the previous algorithm. Fig-ures 3c and d show the original and reconstructed curvilinearand angular velocity signals respectively. What is of inter-est here is the representation of a possible action plan thatcould have been used by the subject to produce this word.The spatial and timing properties of the stroke sequence areillustrated in Fig. 3b and e respectively. To generate a con-tinuous trace, 11 strokes have been used here. The subjectstarted at the top of the letter ‘s’, with the first stroke aimedat a first virtual target. Once this stroke is initiated, the sub-ject assumes that this target distance will be covered with
a certain degree of precision and after a certain movementtime, as predicted by (5). The subject can thus anticipate theend of the first stroke and initiate the second stroke to aimat a second virtual target, and so on.
In this context, Fig. 3b can be seen as describing the spa-tial characteristics (D1, D2, C0i, θ0i) of the action plan usedby the subject, and Fig. 3e as describing the timing charac-teristic (t0i) of the same plan, once activated. Moreover, theindividual description of each stroke, in terms ofµji andσji, allows a detailed analysis of the temporal propertiesof the neuromuscular agonist and antagonist systems usedto execute that action plan. For example, for right-handers,strokes executed at 45◦ and 270◦ with respect to a baselinedefined by the wrist oscillation plane are generally fasterthan strokes produced in other directions (Plamondon andClement 1991). It is expected that these strokes will proba-bly be characterized by smallerµj andσj values.
4 Psychophysical properties
One interesting feature of the handwriting model describedin this study is that it is based on a kinematic theoryof rapid human movements (Plamondon 1993c,d, 1995b,c,1996, 1997a) that is consistent with the basic psychophysi-cal observations that have been reported in the field. Theseobservations follow from the delta-lognormal law which de-scribes the magnitude of the velocity of each stroke. Thisresults in an analytical description of a single stroke that canbe used for the automatic analysis of complex trajectories.It is also useful for demonstrating how other well-knownproperties of handwriting simply emerge from the vectorialstroke summation.
4.1 Temporal and spatial control and invariance
According to the kinematic theory, the rules of stroke super-imposition are governed by the basic speed/accuracy trade-offs that result from the perceptivo-motor conditions (Plam-ondon 1993d, 1995c) that must be fulfilled to produce andcontrol each individual stroke, as previously mentioned inSect. 2, equation (5). In this perspective, the vectorial delta-lognormal model highlights the interactive role of shape, sizeand time in handwriting control. Many papers have beenpublished on spatial or temporal invariance across changesin writing conditions (Freeman 1914; Denier van der Gonand Thuring 1965; Yasuhara 1975; Wing 1980; Hollerbach1981; Stelmach and Teulings 1983; Greer and Green 1983;Thomassen and Teulings 1985; Wright 1990). Typical stud-ies on these topics deal with specific measurements of spatio-temporal variables for words with a similar shape but of dif-ferent size, words of similar size but a different shape, aswell as words of similar shape written at different speeds.Some experimental conditions are also extended to study theeffect of a change of effectors and of visual feedback (Bern-stein 1967; Merton 1972; Wright 1990). The term ‘word’ isused here in a very broad sense and, depending on the study,refers to any piece of handwriting: a few strokes, a singleletter, some alternating patterns, a sequence of letters or afew real and meaningful words or sentences.
124
Curvilinear velocity (cm/s)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
5
10
15
20
Angular velocity (rad/s)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
0
50
100
150
200
250
0
-50
-100
-150
Time (s)
Stroke
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
1
2
3
4
5
6
7
8
9
10
11
( a )
( c )
( d )
( e )
( b )
P0
12
3
4
5
6
7
8
9
1110
Fig. 3. a Original handwriting specimen (word ‘she’).b Ac-tion plan representation: strokes and virtual targets extracted.c Curvilinear velocity (cm/s):continuous line, original data;squares, model predictions.d Angular velocity (rad/s):con-tinuous line, original data;squares, model predictions.e Timeoverlap of the stroke sequence
So far, some studies have supported the concept of mo-tor equivalence, that is, the ability of a subject to write aword with a different group of end-effectors while roughlypreserving its shape. Other studies show clearly that, for thesame set of effectors, a subject is able to write the same wordin different sizes while preserving its shape almost perfectly.With regard to time control, no consensus has been reachedconcerning what has been referred to as temporal invariance,that is, invariance of writing time across changes in writingsize (Wright 1993).
The vectorial delta-lognormal model presented in thispaper provides some clues to explain and interpret the var-ious observations reported in these experiments. First, onemust take into account a technical problem related to themeasurements that are performed on the data used in these
studies. According to the theory presented in this paper andin line with other similar studies (Morasso and Mussa Ivaldi1982; Morasso et al. 1983; Morasso 1986), strokes are par-tially hidden in the signal and their individual shapes andtiming properties are partially affected by the superimposi-tion process. This basic phenomenon is generally neglectedin the studies mentioned above, and operational methods tosegment a handwritten trace are used. For example, a wordis segmented at the minimum of its velocity pattern (e.g.Schomaker and Teulings 1991), at the minima of theY coor-dinates (e.g. Mermelstein and Eden 1964) or at the points ofpeak curvature (e.g. Morasso 1986). These methods consti-tute a rapid and operational way to segment a trace, but theydo not allow the recovery of the individual strokes that havebeen superimposed to generate the observed pattern. Mea-

125
t0 (2 )=0 .55
0
10
20
30
40
0
20
40
60
80
100
0 0.5 1.0 1.5
0 0.5 1.0 1.5
P0
t0 ( 2)=0.3
0
10
20
30
40
0 0.5 1.0 1.5
0 0.5 1.0 1.5
0
20
40
60
80
100
P0
t0 (2 )=0 .2
0
10
20
30
40
0 0.5 1.0 1.5
0 0.5 1.0 1.5
0
20
40
60
80
100
P0
t0 ( 2)=0.1
0
10
20
30
40
0 0.5 1.0 1.5
0 0.5 1.0 1.50
20
40
60
80
100
P0
Curvilinear velocity (cm/s)
Angular velocity (rad/s)
Trajectory
(a) (b) (c) (d)
1
2
1
2
1
2
1
2
Fig. 4. a Sequence of two linear strokeswith no superimposition: angular discon-tinuity, intermediate target reached.b Ef-fect of a moderate stroke superimpositionon the trajectory, the curvilinear and theangular velocities.c Effect of a significantstroke superimposition on the trajectory,the curvilinear and the angular velocities.d Effect of an almost complete superim-position of strokes on the trajectory, thecurvilinear and the angular velocities
suring the time elapsed between two, three or a few of theseoperational segmentation marks, or evaluating the changesin the shape of the corresponding trace, reflects more or lesswhat has happened at the stroke level, depending on the rel-ative importance of the stroke superimposition process thathas occurred in the production of a specific trace.
Looking at the simple traces described in Fig. 4, for ex-ample, it can be seen that, using the same pair of straightstrokes, a different curved pattern can be generated depend-ing on the time occurrencet02 of the second stroke (Guerfali1996). If the resulting trace is segmented into ‘operationalstrokes’ using curvilinear velocity minima, different pairs ofthese strokes will be analyzed in terms of duration, size orshape, although the only effective change that occurred inthis simulated example was to the parametert02. A singleoperational stroke might even be found when the superim-position process is very significant (Fig. 4d). If the sametraces were analyzed in the representation space providedby the vectorial delta-lognormal model, using the segmenta-tion method described in the previous section, a single pairof strokes would be theoretically extracted and analyzed inany of these specific conditions. Generally speaking, apply-ing the kinematic theory to study spatio-temporal phenom-ena and comparing stroke timing, size and shape could pro-vide better insight into the invariant properties of a traceand would reflect more clearly the possible action plan andstrategies used by the subjects under different experimentalconditions.
In this context, one can easily understand, for exam-ple, why some past studies have led to contradictory resultsregarding temporal invariance (Wright 1993). If we recallthat each individual stroke is subject to a speed/accuracytrade-off (5), due to the delta-lognormal law that governs itsvelocity profile, then there is a relationship between strokeduration and the relative spatial accuracy of the target tobe reached with that stroke (Plamondon 1993d, 1995c). Thefactor and exponent in this relationship (5) are related tothe global timing properties of the agonist and antagonistneuromuscular networks involved in the production of the
stroke. Temporal invariance requires at least the preserva-tion of the relative spatial accuracy of the movement, at thestroke level, as well as keeping the neuromuscular param-eters almost constant from trial to trial. Depending on theperformance of the subjects with respect to these constraints,the expected temporal invariance will be more or less ap-parent.
We have shown in Figs. 2 and 3, for example, as well asin Guerfali (1996), Leclerc (1996), Plamondon and Guerfali(1996b), Plamondon et al. (1997) and Plamondon (1997b),comparative and quantitative results demonstrating the ca-pacity of the vectorial delta-lognormal model to reconstructreal and complex data. The next step will be to use the vec-torial delta-lognormal model to study large sets of real datato analyze and characterize subject performance in specificexperiments (aimed at improving our understanding of themotor control aspects of handwriting), although this is be-yond the scope of this paper. However, as in Hollerbach(1981), Morasso and Mussa-Ivaldi (1982), Edelman andFlash (1987), Bullock et al. (1993) and Singer and Tishby(1994), computer simulations can be used to highlight con-trol strategies, supported by the vectorial delta-lognormalmodel, that are consistent with well-known behavioral data.
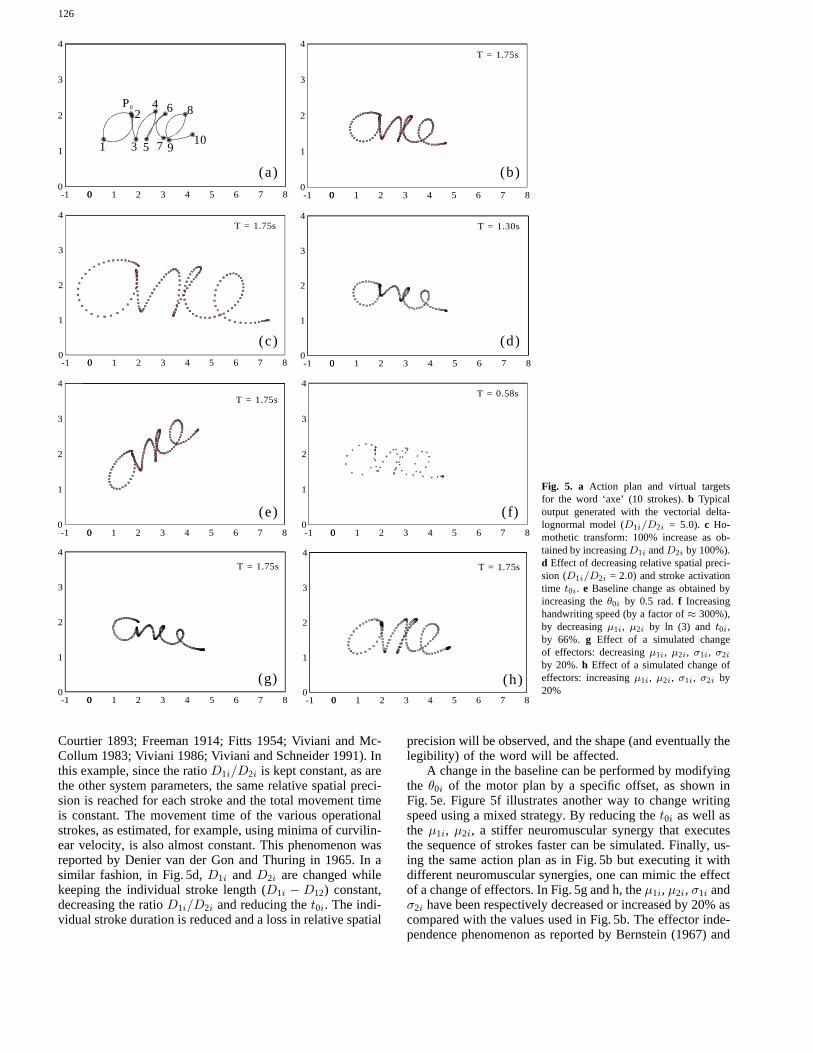
Figure 5 illustrates a few strategies that can be used togenerate slightly different traces from the same action plan,that is, the same set of virtual targets, with a slightly differ-ent subset of strokes. Figure 5a shows a typical action planmade up of a sequence of 10 discontinuous strokes linkinga set of 10 virtual targets. Figure 5b shows a typical contin-uous output, as obtained by activating a neuromuscular syn-ergy with a proper timing scheme (t0i, µ1i, µ2i, σ1i, σ2i). Thestroke superimposition process results in a continuous trace:the word ‘axe’. The global writing time is given in the topright-hand corner. The same word (Fig. 5c) can be writtenin the same movement time but enlarged spatially by merelyincreasing the values ofD1i andD2i of the action plan bya specific ratio (100% in this example). For many years,this phenomenon has been known as the isochrony princi-ple and has been studied by many researchers (Binet and
126
0 1 2 3 4 5 6 7 80-10
1
2
3
4
0 1 2 3 4 5 6 7 80-10
1
2
3
4T = 1.75s
0 1 2 3 4 5 6 7 80-10
1
2
3
4T = 1.75s
0 1 2 3 4 5 6 7 80-10
1
2
3
4T = 0.58s
0 1 2 3 4 5 6 7 80-10
1
2
3
4
(a) (b)
(c) (d)
(e)
(g) (h)
(f)
0 1 2 3 4 5 6 7 80-10
1
2
3
4T = 1.30s
0 1 2 3 4 5 6 7 80-10
1
2
3
4
0 1 2 3 4 5 6 7 80-10
1
2
3
4
T = 1.75s
T = 1.75s T = 1.75s
P0
1
2
3
4
5
6
7
8
910
Fig. 5. a Action plan and virtual targetsfor the word ‘axe’ (10 strokes).b Typicaloutput generated with the vectorial delta-lognormal model (D1i/D2i = 5.0). c Ho-mothetic transform: 100% increase as ob-tained by increasingD1i andD2i by 100%).d Effect of decreasing relative spatial preci-sion (D1i/D2i = 2.0) and stroke activationtime t0i. e Baseline change as obtained byincreasing theθ0i by 0.5 rad.f Increasinghandwriting speed (by a factor of≈ 300%),by decreasingµ1i, µ2i by ln (3) and t0i,by 66%. g Effect of a simulated changeof effectors: decreasingµ1i, µ2i, σ1i, σ2i
by 20%.h Effect of a simulated change ofeffectors: increasingµ1i, µ2i, σ1i, σ2i by20%
Courtier 1893; Freeman 1914; Fitts 1954; Viviani and Mc-Collum 1983; Viviani 1986; Viviani and Schneider 1991). Inthis example, since the ratioD1i/D2i is kept constant, as arethe other system parameters, the same relative spatial preci-sion is reached for each stroke and the total movement timeis constant. The movement time of the various operationalstrokes, as estimated, for example, using minima of curvilin-ear velocity, is also almost constant. This phenomenon wasreported by Denier van der Gon and Thuring in 1965. In asimilar fashion, in Fig. 5d,D1i and D2i are changed whilekeeping the individual stroke length (D1i − D12) constant,decreasing the ratioD1i/D2i and reducing thet0i. The indi-vidual stroke duration is reduced and a loss in relative spatial
precision will be observed, and the shape (and eventually thelegibility) of the word will be affected.
A change in the baseline can be performed by modifyingthe θ0i of the motor plan by a specific offset, as shown inFig. 5e. Figure 5f illustrates another way to change writingspeed using a mixed strategy. By reducing thet0i as well asthe µ1i, µ2i, a stiffer neuromuscular synergy that executesthe sequence of strokes faster can be simulated. Finally, us-ing the same action plan as in Fig. 5b but executing it withdifferent neuromuscular synergies, one can mimic the effectof a change of effectors. In Fig. 5g and h, theµ1i, µ2i, σ1i andσ2i have been respectively decreased or increased by 20% ascompared with the values used in Fig. 5b. The effector inde-pendence phenomenon as reported by Bernstein (1967) and

127
(a) (b)
(c) (d)
(e) (f)
P0
1
2
3
4
5
6
7
8
9
10
11
Fig. 6. a Action plan and virtual targets for the word ‘une’ (11 strokes).b Typical output generated with the vectorial delta-lognormal model.c Ef-fect of a vertical increase in the virtual target positions.d Effect of a hor-izontal increase in the virtual target positions.e Slant change as obtainedby a right translation of the top set of virtual targets.f Slant change asobtained by a left translation of the top set of virtual targets
Merton (1972) is clearly apparent here. The word ‘axe’ isstill easy to read, although it appears slightly different fromthe specimen depicted in Fig. 5b. A larger modification ofthe timing properties of the agonist and antagonist systemswould eventually result in a loss of legibility.
The vectorial delta-lognormal model also supports otherwell-known types of phenomena. Figure 6a shows anotheraction plan, and Fig. 6b a typical instance of this plan. Fig-ures 6c and d show the effect of increasing, respectively, thevertical and horizontal distances between the virtual targetsof the action plan. Figures 6e and f depict the capacity ofthe model to change the writing slope by translating the topset of virtual targets to the right or to the left with respectto the bottom set of targets. In all these examples, the re-sulting traces look quite realistic. However, these vertical orhorizontal scale changes are not as straightforward as the ho-mothetic changes depicted in Fig. 5c. To simulate a changein the vertical scale, for example, one has to change more pa-rameters of the action plan (D1i, D2i, C0i, θ0i) as comparedwith the simple changes ofD1i andD2i that were required torealize a full homothetic scaling. This observation is consis-tent with the fact that it is normally easier for human subjectsto produce a full homothetic scaling as compared with a ver-tical or a horizontal change of scale or a change of slope. Itmust also be remembered that the problem is probably evenmore complex than the simple examples shown here, wherethe neuromuscular timing parameters (µ1i, µ2i, σ1i, σ2i) havebeen kept constant for simplicity.
As can be seen from these various simulated examples,different types of realistic patterns can be generated by thevectorial delta-lognormal model. In practice, a subject might
use and combine some of these strategies to produce flu-ent and legible handwriting. Using the kinematic theory, theindividual strokes could be recovered and their specific pa-rameters analyzed under different experimental conditions tostudy these strategies.
4.2 Discontinuous angular control and the 2/3 power law
Another consequence of the vectorial delta-lognormal modelis that the control of the angular velocity is not an indepen-dent process, as we have suggested in some of our previousstudies (Plamondon 1987, 1989a, 1991, 1992). The contin-uous angular velocity signal emerges from the vectorial ad-dition of discontinuous strokes. Depending on the timingdifference between two successive strokes, different trajec-tories can be generated, with specific curvilinear and angularvelocity patterns (Fig. 4). According to this view, a subjectcan generate different shapes with some characteristic ve-locity profiles, mostly by controlling the time occurrencet02of the second stroke. The angular velocity of the pentip sim-ply emerges from the stroke superimposition process, eachindividual stroke direction evolving according to the timeintegral described by (3).
This superimposition process provides an explanation foran important phenomenon that has been reported concerningthe relationship between angular velocity and the curvatureof a trajectory (or the curvilinear velocity and the radius ofcurvature) (for a review see Bourdon and Plamondon 1993).Indeed, Laquaniti et al. (1983, 1984) have observed that, fora certain class of movements (mostly elliptical or piece-wiseelliptical trajectories), the curvatureC(t) and the angularvelocity (Vθ(t)) are linked by a 2/3 power law:
νθ(t) = kC2/3(t) (19)
or, if one analyzes the curvilinear velocity with respect tothe radius of curvature of the trajectory:
ν(t) = kR2/3(t) (20)
For more complex trajectories, this simple relationshipbecomes less valid and a better equation must be used to fitreal data (Viviani and Schneider 1991; Viviani and Stucchi1992):
ν(t) = k(t)
(R(t)
1 − aR(t)
)b
or
νθ(t) = k(t)
(1
C(t) + a
)b(21)
If a = 0 andk(t) is a constant as a function of time, theselatter relationships are equivalent to (19) and (20), forb =1/3.
This 2/3 power law can be interpreted in the context ofthe vectorial delta-lognormal model (see Appendix). Indeed,the superimposition of two circular strokes leads to a com-plex trajectory that can be described by (12) and (16). A partof this trajectory approximates an ellipse and in this specificzone the 2/3 power relationship is valid. Outside the zone,the relationship will not be verified, a point that has been re-ported by a few studies (e.g. Thomassen and Teulings 1985;Wann et al. 1988).
128
5 7 9 11 13 15 17 198
10
12
14
16
X (cm)
Y (cm)
(a)
Time (s)
V /C2/3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
5
10
15
20
0
-5
(b)
Y (cm)
X (cm)
9 9.5 10 10.5 11 11.5 12 12.5 139
10
11
12
13(c)
Y (cm)
X (cm)
1 2 3 4 5 612
13
14
15
(e)
Time (s)
V /C2/3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
0
10
20
30
40
0
-10
Time (s)
V /(C+ )2/3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
0
10
20
30
0
-10
-20
= 0.0= 0.1
(d)
(f)
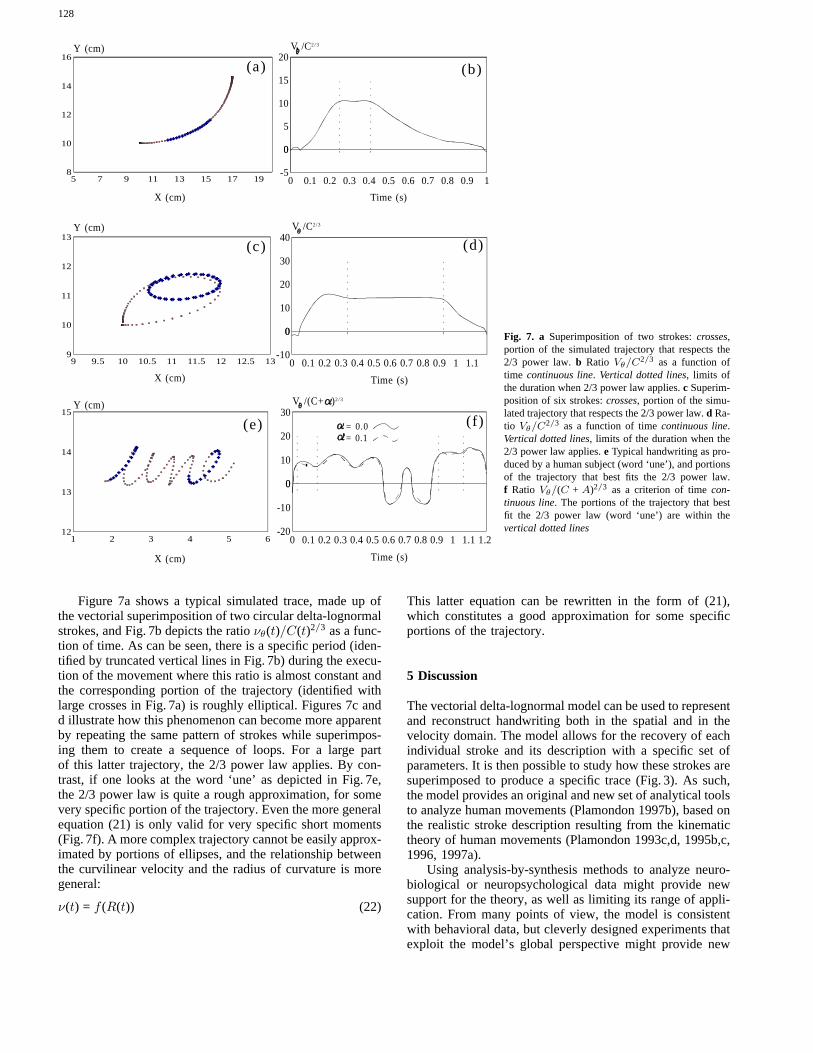
Fig. 7. a Superimposition of two strokes:crosses,portion of the simulated trajectory that respects the2/3 power law.b Ratio Vθ/C2/3 as a function oftime continuous line. Vertical dotted lines, limits ofthe duration when 2/3 power law applies.c Superim-position of six strokes:crosses, portion of the simu-lated trajectory that respects the 2/3 power law.d Ra-tio Vθ/C2/3 as a function of timecontinuous line.Vertical dotted lines, limits of the duration when the2/3 power law applies.e Typical handwriting as pro-duced by a human subject (word ‘une’), and portionsof the trajectory that best fits the 2/3 power law.f Ratio Vθ/(C + A)2/3 as a criterion of timecon-tinuous line. The portions of the trajectory that bestfit the 2/3 power law (word ‘une’) are within thevertical dotted lines
Figure 7a shows a typical simulated trace, made up ofthe vectorial superimposition of two circular delta-lognormalstrokes, and Fig. 7b depicts the ratioνθ(t)/C(t)2/3 as a func-tion of time. As can be seen, there is a specific period (iden-tified by truncated vertical lines in Fig. 7b) during the execu-tion of the movement where this ratio is almost constant andthe corresponding portion of the trajectory (identified withlarge crosses in Fig. 7a) is roughly elliptical. Figures 7c andd illustrate how this phenomenon can become more apparentby repeating the same pattern of strokes while superimpos-ing them to create a sequence of loops. For a large partof this latter trajectory, the 2/3 power law applies. By con-trast, if one looks at the word ‘une’ as depicted in Fig. 7e,the 2/3 power law is quite a rough approximation, for somevery specific portion of the trajectory. Even the more generalequation (21) is only valid for very specific short moments(Fig. 7f). A more complex trajectory cannot be easily approx-imated by portions of ellipses, and the relationship betweenthe curvilinear velocity and the radius of curvature is moregeneral:
ν(t) = f (R(t)) (22)
This latter equation can be rewritten in the form of (21),which constitutes a good approximation for some specificportions of the trajectory.
5 Discussion
The vectorial delta-lognormal model can be used to representand reconstruct handwriting both in the spatial and in thevelocity domain. The model allows for the recovery of eachindividual stroke and its description with a specific set ofparameters. It is then possible to study how these strokes aresuperimposed to produce a specific trace (Fig. 3). As such,the model provides an original and new set of analytical toolsto analyze human movements (Plamondon 1997b), based onthe realistic stroke description resulting from the kinematictheory of human movements (Plamondon 1993c,d, 1995b,c,1996, 1997a).
Using analysis-by-synthesis methods to analyze neuro-biological or neuropsychological data might provide newsupport for the theory, as well as limiting its range of appli-cation. From many points of view, the model is consistentwith behavioral data, but cleverly designed experiments thatexploit the model’s global perspective might provide new

129
insights into our understanding of motor control. The globalapproach, polarized around opposing agonist and antagonistsystems, is in accordance with the recent comments made byMackay (1997) and Sherwood (1997). The concept of plan-ning movement in kinematic coordinates is also supportedby some experiments (e.g. Wolpert et al. 1995), as is the ideathat velocity might be the primary control variable in move-ment control (Flanders and Herman 1992; Soechting et al.1995; Houk and Gibson 1987). But how does this happen?What is the role of the various motor cortex areas of thecerebellum, the basal ganglia, and the different motor neu-rons and muscle fibers? This has to be studied, and the use ofthe delta-lognormal law will be of great help for this purposesince it allows very good data fitting in three complementaryrepresentation spaces: curvilinear and angular velocity, andthe static trajectory image.
A single stroke velocity profile, as described by a delta-lognormal law, is intrinsically asymmetric as compared, forexample, with the symmetrical velocity profiles of the min-imum snap (Edelman and Flash 1987) or minimum jerkmodels (Flash and Hogan 1985), the models that use cubicsplines (Morasso and Mussa-Ivaldi 1982) or sinusoidal func-tions (Eden 1962; Hollerbach 1981). Moreover, the delta-lognormal velocity profiles are intrinsically continuous. Sev-eral previous models were based on discontinuous velocityprofiles (Denier van der Gon et al. 1962; MacDonald 1964;Mermelstein and Eden 1964; Dooijes 1983; Flash and Hogan1985; Plamondon and Lamarche 1986; Edelman and Flash1987; Plamondon 1989a,b; Leclerc et al. 1992, Wada andKawato 1995). Others use a continuous oscillatory patternas a basic movement and generates discontinuities in the re-constructed signals (Eden 1962; Hollerbach 1980; Stettinerand Chazan 1994; Singer and Tishby 1994), discontinuitiesthat are not apparent in the real signal.
Many models require advance definition of movementduration as a command parameter (Denier van der Gon et al.1962; MacDonald 1964; Yasuhara 1975; Dooijes 1983; Flashand Hogan 1985; Plamondon and Lamarche 1986; Edelmanand Flash 1987; Plamondon 1989a,b; Leclerc et al. 1992;Wada and Kawato 1995) and, as such, require a further hy-pothesis to deal with speed/accuracy trade-offs (Plamondonand Alimi 1997). With the kinematic theory, movement timedoes not need to be preplanned since it emerges from thedelta-lognormal law that describes the stroke speed, predictsany forms of these trade-offs and suggests how they can con-stitute a key feature for the anticipation process that leadsto stroke superimposition (Plamondon 1997b). According tothis view, movement duration is not an explicit parameterof the motor action plan but an implicit characteristic ofthe trajectory. It emerges from the intrinsic properties ofthe delta-lognormal law characterizing a neuromuscular syn-ergy. Consequently, in the time domain, fluent handwritingcan be produced by voluntarily controlling the individualstroke starting time. The only other model that deals withthe speed/accuracy trade-offs is the Bullock et al. (1993)model, provided that a proper set of GO signals is used asinput and synchronized to control the three degrees of free-dom required by this model.
The vectorial delta-lognormal model exploits the speed/accuracy trade-offs to define and represent a generic actionplan in terms of a discontinuous sequence of circular strokes
linking virtual targets that have to be reached within somespatial errors. This representation is consistent with severalpapers suggesting that arm movement planning occurs in aspatial coordinate system instead of a joint planning space(Morasso 1981; Abend et al. 1982). In practice, most ofthe virtual targets are not reached during execution due tothe superimposition process which results in a continuoussmooth trajectory. As a consequence, most of the virtual tar-gets lie outside the real trajectory, and to recover them onehas to look at high-curvature area and trajectory discontinu-ities (Leclerc 1996; Li et al. 1996). This is also consistentwith the fact that human subjects tend to direct their eyesaccades toward the same high curvature area when theylook at a line image (Noton and Stark 1971). The sequenceof directional targets required by the neural network modelof Bullock et al. (1993) or the via points necessary to ex-ploit the models based on minimization principles (Flash andHogan 1985; Edelman and Flash 1987; Wada and Kawato1995) do not necessarily have this perceptivo-motor inter-pretation, and this often leads to an ad-hoc representation ofa specific trajectory.
Other differences between the vectorial delta-lognormalmodel and other models already published can be foundat the spatio-temporal level. Indeed, the vectorial delta-lognormal model can easily take into account the variousspatio-temporal properties observed in handwriting withoutrequiring continuous monitoring of the current position ofthe end-effector, as required by some models (Bullock et al.1993). For example, size and shift invariance can easily beobtained by modifying only two parameters. Some models‘cannot uniformly regenerate an expanded or reduced tra-jectory of the original trajectory in time and space’ (Wadaet al. 1995, p. 19). The vectorial delta-lognormal model ex-plains the spatio-temporal properties of various trajectoriesin terms of changes in the parameters of the motor actionplan, or at a lower level in terms of changes in the pa-rameters of the neuromuscular networks that execute thatplan, without requiring any minimization principle. It is notclaimed here that the minimization of some kinematic or dy-namic factors is not important in trajectory generation. Ourinterpretation is that these factors are not part of the basicstroke definition. Strokes are defined with respect to the fun-damental asymptotic properties of the impulse response ofa neuromuscular system and, consequently, this definition issufficient to reconstruct a trajectory. However, it is clear thatan analysis-by-synthesis experiment might lead to numerousequivalent solutions and the use of kinematic or dynamicminimization criteria might be one way to reduce the searchspace and to select an optimal solution with respect to sucha criterion (Guerfali 1996).
6 Conclusion
In this paper we have presented the principal characteristicsof a vectorial delta-lognormal model of handwriting gener-ation to highlight how this model can be useful in the studyand analysis of handwritten patterns and in understandingthem. We have specifically focused on stroke description,superimposition and extraction to analyze and synthesizehandwriting and to explain some of the most best-known
130
psychophysical phenomena reported in the field. What con-sistently emerges from that approach is the fact that humanbeings seem to exploit the very basic properties and limi-tations of their own neuromuscular synergies, as describedby the delta-lognormal law (Plamondon 1993c, 1995b), toproduce complex tasks in a quasi-automatic fashion. In thisperspective, the vectorial model is very powerful at a de-scriptive level and, as such, provides a global frameworkand a general methodology for pointing out and exploit-ing among other things, the higher-level strategies used bysome subjects to accomplish these tasks. Although the algo-rithms are complex and the solutions might not be unique(Guerfali 1996), being able to perform a reverse analysisand extract the original intended strokes from a specific tra-jectory is a key tool that can be very useful to researchersinterested in studying fundamental aspects of handwritingcontrol as well as in applying these concepts to the designof computer-based systems that use handwriting or gestureas a human-machine interface.
Acknowledgements.This work was supported partially by grant OGP0915from NSERC Canada, grant ER-1220 from FCAR Quebec and grant3650/3750 from IRIS-2 Project, Reseaux des centres d’excellence duCanada. The authors wish to thank Mrs. Helene Dallaire for typing thevarious versions of this manuscript.
Appendix. The origin of the 2/3 power law
The vectorial delta-lognormal model predicts under which conditions a 2/3power law will be observed between the angular velocity and the trajectorycurvature. This can be seen by analyzing a trajectory made up of two strokessuperimposed in time. Each stroke ‘i’ is characterized by a curvatureC0i
and an initial angular directionθ0i, and the magnitude of its velocity vectoris described by a∆Λ law.
Assuming for simplicity that the first stroke starts att01 = 0 and thesecond att02, the velocity profile of the complex profile is described by
~ν(t) = ~ν1(t) + ~ν2(t − t02) (A1)
If this vector is analyzed in a cartesian coordinate system, theX and Ycomponents of the resulting velocity are obtained by
νx(t) = ν1(t) cos(θ1(t)) + ν2(t − t02) cos(θ2(t − t02)) (A2)
νy(t) = ν1(t) sin(θ1(t)) + ν2(t − t02) sin(θ2(t − t02)) (A3)
If ∆θ(t) is defined as the instantaneous difference in angular directionbetween the two strokes at timet:
∆θ(t) = θ1(t) − θ2(t − t02) (A4)
(A2) can be written as:
νx(t) = ν1(t) cos(θ1(t)) − ν2(t − t02) cos(θ1(t) − ∆θ(t)) (A5)
and using trigonometric transformations
νx(t) = ν1(t) cos(θ1(t)) + ν2(t − t02) cos(θ1(t)) cos(∆θ(t))
−ν2(t − t02) sin(θ1(t)) sin(∆θ(t)) (A6)
Similarly, for theY component, we obtain
νy(t) = ν1(t) sin(θ1(t)) + ν2(t − t02) sin(θ1(t)) cos(∆θ(t))
−ν2(t − t02) cos(θ1(t)) sin(∆θ(t)) (A7)
Hypothesis 1:There are parts of the resulting trajectory where
∆θ(t) ' nπ
4(A8)
For that portion, (A6) and (A7) reduce to
νx(t) ' ν1(t) cos(θ1(t)) + ν2(t − t02) sin(θ1(t)) (A9)
νy(t) ' ν1(t) sin(θ1(t)) − ν2(t − t02) cos(θ1(t)) (A10)
where we focus onn = 1 for the rest of the demonstration.Using trigonometric transformations, these latter two equations can be
rewritten as follows:
νx(t) ' ν1(t) cos(θ1(t)) + ν2(t − t02) cos(90◦ − θ1(t)) (A11)
νy(t) ' ν1(t) sin(θ1(t)) − ν2(t − t02) sin(90◦ − θ1(t)) (A12)
Hypothesis 2: The starting timet02 of the second stroke is such that thefollowing equivalences are roughly valid on the specific portion of thetrajectory under study:
ν2(t − t02) cos(90◦ − θ1(t)) ' Kx(t)ν1(t) cos(θ1(t)) (A13)
ν2(t − t02) sin(90◦ − θ1(t)) ' Ky(t)ν1(t) sin(θ1(t)) (A14)
In other words, the subject starts his or her second stroke at a specifictime, in such a way as to compensate for the 90◦ phase shift between thetwo strokes and to link the velocity module of this second stroke to thevelocity module of the first stroke by a time functionKx(t) or Ky(t).
Thus, theX and Y components of the resulting velocity can be de-scribed by
νx(t) ' ν1(t)(1 + Kx(t)) cos(θ1(t)) (A15)
νy(t) ' ν1(t)(1 + Ky(t)) sin(θ1(t)) (A16)
The previous two equations have a form similar to that of the parametricequation of the velocity of a particle along an elliptic trajectory, providedthat
ν1(t)(1 + Kx(t)) ' a (A17)
ν1(t)(1 + Ky(t)) ' b (A18)
wherea andb are approximately constant for that portion of the trajectory.(The reader should note that ifa > 0 and b < 0 the trajectory will behyperbolic and the same conclusion will apply.)
If these latter two conditions (A17 and A18) are met, then the curvatureC(t) of that elliptical portion will be
C(t) =ab
(ν(t))3(A19)
and
ν(t) '[ν1(t)2(1 + Kx(t))(1 + Ky(t))
]1/3R(t)1/3 (A20)
that is
ν(t) ∝ R1/3(t) (A21)
or
νθ(t) ∝ C2/3(t) (A22)
Thus, under the specific conditions described by hypotheses 1 and 2,the vectorial delta-lognormal model predicts that the time superimpositionof two circular strokes will result in a complex trajectory having a portionthat can be approximated by an ellipse, and that, for that specific portion,a 2/3 power law will be observed between the angular velocity and thecurvature. Outside that specific portion, the law will not be valid. Computersimulations show that the length of the trajectory where the 2/3 power lawapplies can be expanded if more than two strokes are superimposed (seeFig. 7d).
References
1. Abend W, Bizzi E, Morasso P (1982) Human arm trajectory formation.Brain 105: 331–348
2. Alimi A, Plamondon R (1993) Performance analysis of handwritingstroke generation models. Proc 3rd Int Workshop on Frontiers in Hand-writing Recognition, pp 272–283
131
3. Alimi A, Plamondon R (1994) Analysis of the parameter dependence ofhandwriting generation models on movement characteristics. In: Faure,C, Keuss P, Lorette G (eds) Advances in handwriting and drawing: amultidisciplinary approach. Europia, Paris, pp 363–378
4. Alimi A (1995) Contribution au developpement d’une theorie degeneration de mouvements simples et rapides: application au manuscrit.PhD Dissertation, September, Ecole Polytechnique de Montreal
5. Bernstein N (1967) The coordination and regulation of movements.Pergamon Press, Oxford
6. Binet A, Courtier J (1893) Sur la vitesse des gestes graphiques. RevPhilos 35: 664–671
7. Bourdon JL, Plamondon R (1993) Rapport bibliographique: le role dutemps dans l’ecriture et la relation entre la forme d’une trajectoire etsa cinematique. Technical report EPM/RT-93/01, Ecole Polytechniquede Montreal
8. Bullock D, Grossberg S, Mannes C (1993) A neural network modelfor cursive script production. Biol Cybern 70: 15–28
9. Denier van der Gon JJ, Thuring JP, Strackee J (1962) A handwritingsimulator. Phys Med Biol 6: 407–414
10. Denier van der Gon JJ, Thuring JP (1965) The guiding of humanwriting movements. Kybernetik 4/2: 145–148
11. Dooijes EH (1983) Analysis of handwriting movements. Acta Psychol54: 99–114
12. Edelman S, Flash T (1987) A model of handwriting. Biol Cybern 57:25–36
13. Eden M (1962) Handwriting and pattern recognition. IRE Trans InformTheory 8: 160–166
14. Faure C, Keuss P, Lorette G, Vinter A (1994) Advance in handwritingand drawing: a multidisciplinary approach. Europia, Paris
15. Fitts PM (1954) The information capacity of the human motor systemin controlling the amplitude of movement. J Exp Psychol 47: 381–391
16. Flanders M, Herman U (1992) Two components of muscle activation:Scaling with the speed of arm movement. J Neurophysiol 67: 931–943
17. Flash T, Hogan N (1985) The coordination of arm movements: anexperimentally confirmed mathematical model. J Neurosci 5: 1688–1703
18. Freeman FN (1914) Experimental analysis of the writing movement.Psychol Monogr 17 (whole no 75): 1–46
19. Greer KL, Green DW (1983) Context and motor control in handwriting.Acta Psychol 54: 205–215
20. Guerfali W (1996) Modele delta-lognormal vectoriel pour l’analyse dumouvement et la generation de l’ecriture manuscrite. PhD dissertation,Ecole Polytechnique de Montreal
21. Guerfali W, Plamondon R (1995a) Control strategies for handwritinggeneration. Proc 7th Biennal Conf Int Graphonomics Soc, London,Ontario, p 65
22. Guerfali W, Plamondon R (1995b) The delta lognormal theory for thegeneration and modeling of cursive characters. Proc 3rd Int Conf onDocument Analysis, Montreal, pp 495–498
23. Guerfali W, Plamondon R (1997) A new method for the analysis ofsimple and complex planar rapid movements. J Neurosci Methods (inpress)
24. Hollerbach JM (1981) An oscillation theory of handwriting. Biol Cy-bern 39: 139–156
25. Houk JC, Gibson AR (1987) Sensory motor processing through thecerebellum. In: New concepts in cerebellar neurobiology. AR Liss,New York, pp 387–416
26. Jack WR (1895) On the analysis of voluntary muscular movements bycertain new instruments. J Anat Physiol 29: 473–478
27. Lacquaniti F, Terzuolo CA, Viviani P (1983) The law relating kine-matic and figural aspects of drawing movements. Acta Psychol 54:115–130
28. Lacquaniti F, Terzuolo CA, Viviani P (1984) Global metric propertiesand preparatory processes in drawing movements. In: Kornblum S,Requin J (eds) Preparatory states and processes. Erlbaum, Hillsdale,NJ, pp 357–370
29. Lashley KS (1917) The accuracy of movements in the absence ofexcitation from the moving organ. Am J Physiol 20: 169
30. Leclerc F (1996) Modele de generation de mouvements rapides enrepresentation de signatures manuscrites. PhD dissertation,Ecole Poly-technique de Montreal
31. Leclerc F, Plamondon R, Lorette G (1992) Des gaussiennes pour lamodelisation des signatures et la segmentation des traces manuscrits.Traitement du Signal 9: 347–358
32. Li X, Parizeau M, Plamondon R (1996) Segmentation and reconstruc-tion of on-line handwritten scripts. Pattern Recog (in press)
33. Mackay WA (1997) Segregation of agonist and antagonist systemsminimizes the benefits of polarity. Behav Brain Sci 20 (in press)
34. Menier G, Plamondon R, Suen CY (1997) Non-linear regression andgenetic algorithm application to parameter extraction for the delta-lognormal equation. In preparation
35. Mermelstein P, Eden M (1964) A system for automatic recognition ofcursive script. Proc Fall Joint Comput Conf 26: 333–342
36. Merton PA (1972) How we control the contraction of our muscles. SciAm [March]: 32
37. Morasso P (1981) Spatial control of arm movements. Exp Brain Res42: 223–227
38. Morasso P (1986) Understanding cursive script as a trajectory forma-tion paradigm. In: Kao HSR, van Galen GP, Hoosain R (eds) Grapho-nomics: contemporary research in handwriting. Elsevier, New York,pp 137–167
39. Morasso P, Mussa Ivaldi FA (1982) Trajectory formation and hand-writing: a computational model. Biol Cybern 45: 131–142
40. Morasso P, Sanguinetti V (1993) Neurocomputing aspects in modellingcursive handwriting. Acta Psychol 82: 213–235
41. Morasso P, Mussa Ivaldi FA, Ruggerio C (1983) How a discontinuousmechanism can produce continuous patterns in trajectory formation.Acta Psychol 54: 83–98
42. Morasso P, Sanguineti V, Tsuji T (1994) A model for the generationof virtual targets in trajectory formation. In: Faure C, Keuss P, LoretteG, Vinter A (eds) Advances in handwriting and drawing: a multidisci-plinary approach. Europia, Paris, pp 333–348
43. Noton D, Stark L (1971) Scan paths in saccadic eye movements whileviewing and recognizing patterns. Vision Res 11: 929–942
44. Plamondon R (1987) What does differential geometry tell us abouthandwriting generation? Proc 3rd Int Symp on Handwriting and Com-puter Applications, Montreal, pp 11–13
45. Plamondon R (1989a) A handwriting model based on differential ge-ometry. In: Plamondon R, Suen CY, Simner ML (eds) Computer recog-nition and human production of handwriting. World Scientific, Singa-pore, pp 179–192
46. Plamondon R (1989b) Handwriting control: a functional model. In:Cotterill R (ed) Models of brain function. Academic Press, New York,pp 563–574
47. Plamondon R (1991) On the origin of asymmetric bell-shaped velocityprofiles in rapid-aimed movements. In: Stelmach GE, Requin J (eds)Tutorial in motor neuroscience. Kluwer, Dordrecht, pp 283–295
48. Plamondon R (1992) A model based segmentation framework for com-puter processing of handwriting. Proc 11th Conf on Pattern Recogni-tion, The Hague, pp 303–312
49. Plamondon R (Ed) (1993a) Handwriting processing and recognition.Pattern Recog 26 [Special Issue]
50. Plamondon R (1993b) Looking at handwriting generation from a ve-locity control perspective. Acta Psychol 82: 89–101
51. Plamondon R (1993c) The generation of rapid human movements. I. Adelta lognormal law. Technical report EPM/RT-93/4, Ecole Polytech-nique de Montreal
52. Plamondon R (1993d) The generation of rapid human movements.II. Quadratic and power laws. Technical report EPM/RT-93/5, EcolePolytechnique de Montreal
53. Plamondon R (1994) Progress in automatic signature verification.World Scientific, Singapore
54. Plamondon R (Ed) (1995a) Cursive script recognition. Machine VisionAppl 8 [Special Issue]
55. Plamondon R (1995b) A kinematic theory of rapid human movements.I. Movement representation and generation. Biol Cybern 72: 297–307
56. Plamondon R (1995c) A kinematic theory of rapid human movements.II. Movement time and control. Biol Cybern 72: 309–320
57. Plamondon R (1995d) A delta lognormal model for handwriting gener-ation. Proc 7th Biennal Conf Int Graphonomics Soc, London, Ontario.pp 126–127
58. Plamondon R (1996) The generation of rapid human movements. Part
132
III. Kinetic predictions. Technical report EPM/RT-96/23,Ecole Poly-technique de Montreal,
59. Plamondon R (1997a) A kinematic theory of rapid human movements.Part III. Kinetic outcomes. Biol Cybern (in press)
60. Plamondon R (1997b) The kinematic theory: a new window to studyand analyze simple and complex human movements. Behav Brain Sci(in press)
61. Plamondon R, Alimi A, Yergeau P, Leclerc F (1993) Modelling veloc-ity profiles of rapid movements: a comparative study. Biol Cybern 69:119–128
62. Plamondon R, Alimi A (1997) Speed/accuracy trade-offs in target di-rected movements. Behav Brain Sci (in press)
63. Plamondon R, Clement B (1991) Dependence of peripheral and centralparameters describing handwriting generation on movement direction.Hum Mov Sci 10:169–183
64. Plamondon R, Guerfali W (1996a) Why handwriting segmentation canbe misleading. Proc 13th Int Conf on Pattern Recognition, Vienna,pp 396–400
65. Plamondon R, Guerfali W (1996b) The generation of handwritingwith delta-lognormal synergies. Technical report EPM/RT-96/24,EcolePolytechnique de Montreal
66. Plamondon R, Guerfali W, Li X (1997) The generation of oriental char-acters: new perspectives for automatic handwriting processing. Proc17th Int Conf on Computer Processing of Oriental Languages, HongKong, pp. 113–120
67. Plamondon R, Lamarche F (1986) Modelization of handwriting: a sys-tem approach. In: Kao, HSR, van Galen GP, Hoosain R (eds) Grapho-nomics: contemporary research in handwriting. Elsevier, Amsterdam,pp 169–183
68. Plamondon R, Maarse FJ (1989) An evaluation of motor models ofhandwriting. IEEE Trans Syst Man Cybern 19: 1060–1072
69. Plamondon R, Privitera MC (1995) A neural model for generating andlearning a rapid movement sequence. Biol Cybern 74: 117–130
70. Plamondon R, Yergeau P, Riehle A, Requin J (1996) Modelisation dela rotation du poignet chez le singe par modele delta-lognormal:etudepreliminaire. Rapport technique,Ecole Polytechnique
71. Privitera MC, Plamondon R (1995) A self organizing neural networkfor learning and generating sequences of target directed movements inthe context of a delta lognormal synergy. Proc 1995 IEEE Int Conf onNeural Networks 4, Perth, Australia, pp 1999–2004
72. Schomaker LRB, Teulings HL (1991) Stroke versus character-basedrecognition of on-line, connected cursive script. Proc 2nd Int Workshopon Frontiers in Handwriting Recognition, pp 265–277
73. Schomaker LRB, Thomassen AJWM, Teulings HL (1989) A compu-tational of cursive handwriting. In: Plamondon R, Suen CY, SimnerML (eds) Computer recognition and human production of handwriting.World Scientific, Singapore, pp 153–177
74. Sherwood DE (1997) Speed accuracy trade-offs in rapid and simul-taneous and sequential actions: Evidence for carry over effect. BehavBrain Sci 20 (in press)
75. Simner M, Leedham G, Thomassen AJTWM (1996) Handwriting anddrawing research: basic and applied issues. IOS Press, Amsterdam
76. Singer Y, Tishby N (1994) Dynamical encoding of cursive handwriting.Biol Cybern 71: 227–237
77. Soechting JF, Buneo CA, Herman U, Flanders M (1995) Moving effort-lessly in three dimensions: does Donders’law apply to arm movements?J Neurosci 15: 6271–6280
78. Stelmach GE, Teulings HL (1983) Response characteristics of preparedand restructured handwriting. Acta Psychol 54: 51–67
79. Stettiner O, Chazan D (1994) A statistical parametric model for recog-nition and synthesis of handwriting. Proc 12th Int Conf on PatternRecognition II: 34–38
80. Thomassen AJWM, Teulings HL (1985) Time, size and shape in hand-writing: exploring spatio-temporal relationships at different levels. In:Michon JA, Jackson JL (eds) Time, mind, and behavior. Springer,Berlin Heidelberg New York, pp 253–263
81. van Galen GP, Stelmach GE (1993) Handwriting: psychomotor controland cognitive models. Acta Psychol 82 [Special Issue]
82. van Galen GP, Thomassen AJWM, Wing AM. (1991) Handwriting.Hum Mov Sci 10 [Special Issue]
83. Viviani P. (1983) The relation between linear extent and velocity indrawing movements. Neuroscience 10: 211–218
84. Viviani P (1986) Do units of motor action really exist? In: Heuer H,Fromm C (eds) Generation and modulation of action patterns. Springer,Berlin Heidelberg New York, pp 201–216
85. Viviani P, Cenzato M (1985) Segmentation and coupling in complexmovements. J Exp Psychol Hum Percept Perform 11: 828–845
86. Viviani P, McCollum G (1983) The relation between linear extent andvelocity in drawing movements. Neuroscience 10: 211–218
87. Viviani P, Schneider R (1991) A development study of the relation be-tween geometry and kinematics in drawing movements. J Exp PsycholHum Percept Perform 17: 198–218
88. Viviani P, Stucchi N (1992) Biological movements look constant: ev-idence of motor perceptual interactions. J Exp Psychol Hum PerceptPerform 18: 603–623
89. Wada Y, Kawato M (1995) A theory for cursive handwriting based onthe minimization principle. Biol Cybernetics 73: 3–13
90. Wada Y, Koike Y, Vatikiotis-Bateson E, Kawato M (1995) A com-putational theory for movement pattern recognition based on optimalmovement pattern generation. Biol Cybernetics 73: 15–25
91. Wann J, Nimmo-Smith I, Wing AM (1988) Relation between velocityand curvature in movement: equivalence and divergence between apower law and a minimum jerk model. J Exp Psychol Hum PerceptPerform 14: 622–637
92. Wann J, Wing AM, Sovik N (eds) (1991) Development of graphicskills: research, perspectives and educational implications. AcademicPress, New York
93. Wing AM (1980) The height of handwriting. Acta Psychol 46: 141–15194. Wolpert DM, Ghahramani Z, Jordan MI (1995) Arm trajectories
planned in kinematic or dynamic coordinates: an adaptation study. ExpBrain Res 103: 460–470
95. Wright CE (1990) Generalized motor programs: reexamining claims ofeffector independence in writing. In: Jeannerod M (ed) Attention andperformance XIII. Motor representation and control. Erlbaum, Hills-dale, NJ, pp 294–230
96. Wright CE (1993) Evaluation of the special role of time in the controlof handwriting. Acta Psychol 82: 5–52
97. Yasuhara M (1975) Experimental studies of handwriting process. Re-ports of the University of Electrocommunications (Scientific and Tech-nical Section) 25: 233–254