availability models in practice
TRANSCRIPT

&CHAPTER 11
Availability Modeling in Practice
KISHOR S. TRIVEDI,1 ARCHANA SATHAYE,2 and SRINIVASAN RAMANI3
1Dept. of Electrical and Computer Engineering, Duke University, Durham, NC 27708-0291
(E-mail: [email protected]); 2Dept. of Computer Science, San Jose State University, San Jose,
CA 95192 (E-mail: [email protected]); 3IBM Corporation, 3039 Cornwallis Rd., RTP,
NC 27709 (E-mail: [email protected]).
As computer systems continue to be applied to mission-critical environments,
techniques to evaluate their dependability become more and more important.
Of the dependability measures used to characterize a system, availability is one of
the most important.
Techniques to evaluate a system’s availability can be broadly categorized as
measurement-based and model-based. Measurement-based evaluation is expensive
because it requires building a real system and taking measurements and then analyz-
ing the data statistically. Model-based evaluation on the other hand is inexpensive
and relatively easier to perform. In Chapter 11, we first look at some availability
modeling techniques and take up a case study from an industrial setting to illustrate
the application of the techniques to a real problem. Although easier to perform,
model-based availability analysis poses problems like largeness and complexity
of the models developed, which makes the models difficult to solve. Chapter 11
also illustrates several techniques to deal with largeness and complexity issues.
11.1 INTRODUCTION
Complex computer systems are widely used in different applications, ranging from
flight control, and command and control systems to commercial systems like infor-
mation and financial services. These applications demand high performance and
high availability. Availability evaluation addresses failure and recovery aspects of
a system, whereas performance evaluation addresses processing aspects and
assumes that the system components do not fail. For gracefully degrading systems,
a measure that combines system performance and availability aspects is more
293
Dependable Computing Systems. Edited by Hassan B. Diab and Albert Y. ZomayaISBN 0-471-67422-2 Copyright # 2005 John Wiley & Sons, Inc.
meaningful than separate measures of performance and availability. These
composite measures are called performability measures. The two basic approaches
to evaluate the availability/performance measures of a system are as follows:
measurement-based and model-based. In measurement-based evaluation, the
required measures are estimated from measured data using statistical inference tech-
niques. The data are measured from a real system or its prototype. In case of avail-
ability evaluation, measurements are not always feasible. The reason being either
the system has not been built yet or it is too expensive to conduct experiments.
That is, in a high availability system one would need to measure data from several
systems to gather good sample data. On the other hand, injecting faults in a system
can be an expensive procedure. Model-based evaluation is the cost-effective sol-
ution because it allows system evaluation without having to build and measure a
system. In this chapter, we discuss availability modeling techniques and their
usage in practice. To emphasize the practicality of these techniques, we discuss
their pros and cons with respect to a case study, VAXcluster systems1 of Digital
Equipment Corporation (DEC2).
We first discuss different availability modeling approaches in Section 11.2. In
Section 11.3, we discuss the benefits of utilizing a composite availability and per-
formance model in practice instead of a pure availability model. Our discussion
emphasizes this point using a model developed for multiprocessors to determine
the optimal number of processors in the system. In Section 11.4, we present a
case study to demonstrate the utility of availability modeling in a corporate
environment.
11.2 MODELING APPROACHES
Model-based evaluation can be through discrete-event simulation or analytical
models or hybrid models combining simulation and analytical methods. A discrete-
event simulation model can depict detailed system behavior, as it is essentially a
program whose execution simulates the dynamic behavior of the system and
evaluates the required measures. An analytical model consists of a set of equations
describing the system behavior. The required measures are obtained by solving these
equations. In simple cases, closed-form solutions are obtained, but more frequently
numerical solutions of the equations are necessary.
The main benefit of discrete-event simulation is the ability to depict detailed
system behavior in the models. Also, the flexibility of discrete-event simulation
allows its use in performance, availability, and performability modeling. The
main drawback of discrete-event simulation is the long execution time, particularly
when tight confidence bounds are required in the solutions obtained. Also, carrying
out a “what if” analysis requires rerunning the model for different input parameters.
Advances in simulation speed-up techniques, such as regenerative simulation,
1Later known as TruClusters.2Now part of Hewlett-Packard Company.
294 AVAILABILITY MODELING IN PRACTICE
importance sampling [27], importance splitting [26], and parallel and distributed
simulation, also need to be considered.
Analytical models [7] are more of an abstraction of the real system than
discrete-event simulation models. In general, analytical models tend to be easier
to develop and faster to solve than a simulation model. The main drawback is the
set of assumptions that are often necessary to make analytical models tractable.
Recent advances in model generation and solution techniques as well as computing
power make analytical models more attractive. In this chapter, we discuss model-
based evaluation using analytical techniques and how one can achieve results that
are useful in practice.
11.2.1 Analytical Availability Modeling Approaches
A system modeler can either choose state space or non-state space analytical
modeling techniques. The choice of an appropriate modeling technique to represent
the system behavior is dictated by factors such as the measures of interest, level
of detailed system behavior to be represented and the capability of the model to
represent it, ease of construction, and availability of software tools to specify and
solve the model. In this section, we discuss several non-state space and state
space modeling techniques.
11.2.2 Non-state Space Models
Non-state space models can be solved without generating the underlying state space.
Practically speaking, these models can be easily used for solving systems with
hundreds of components because there are many relatively good algorithms
available for solving such models [22]. Non-state space models can be solved to
compute measures like system availability, reliability, and system mean time to fail-
ure (MTTF). The two main assumptions used by the efficient solution techniques are
statistically independent failures and independent repair units for components. The
non-state space model types used to evaluate system availability are “reliability
block diagrams” and “fault trees.” In gracefully degradable systems, knowledge
of the performance of the system is also essential. Non-state space model types
used to evaluate system performance are “product-form queuing models” and
“task-precedence graphs” [16].
11.2.2.1 Reliability Block Diagram In a reliability block diagram (RBD),
each component of the system is represented as a block [16, 25]. This representation
of the system as a collection of components is done at the level of granularity that
is appropriate for the measurements to be obtained. The blocks are then connected
in series and/or in parallel based on the operational dependency between the
components. If for the system to be up, every component of a set of components
needs to be operational, then those blocks are connected in series in the RBD. On
the other hand, if the system can survive with at least one component, then those
blocks are connected in parallel. An RBD can be used to easily compute availability
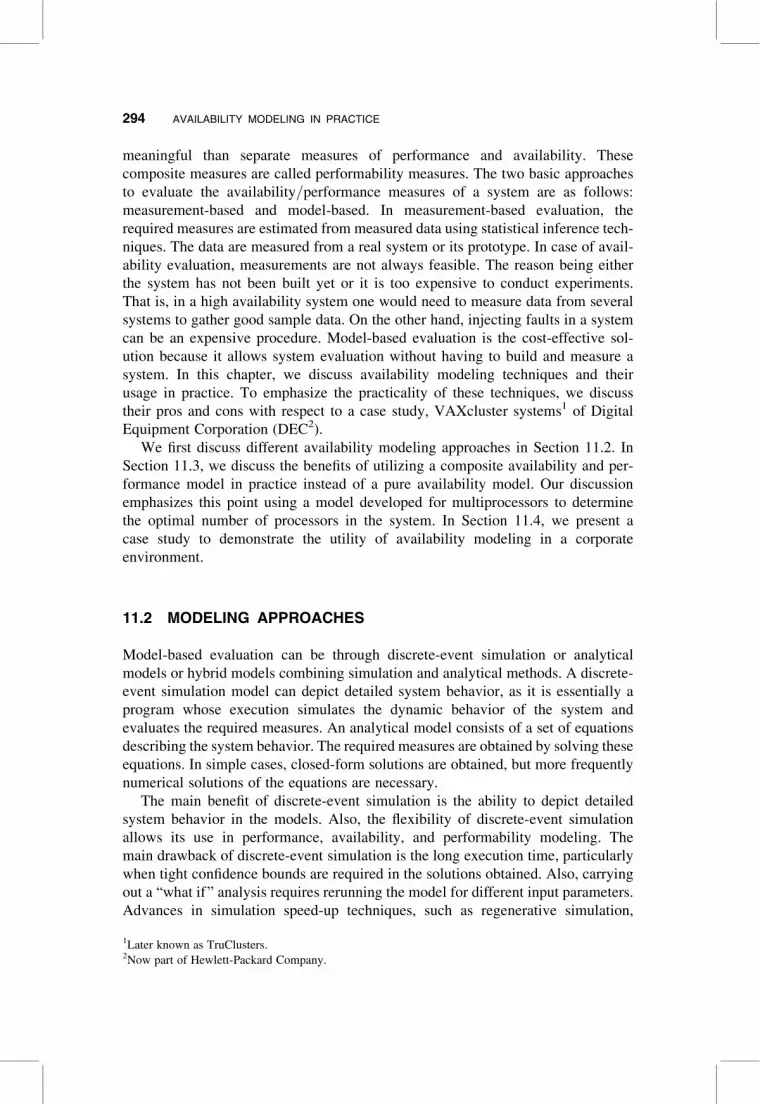
if the repair times (and failure times) are all independent. Figure 11.1(a) shows
11.2 MODELING APPROACHES 295
an RBD representing a multiprocessor availability model with n processors where
at least one processor is required for the system to be up. This RBD represents a
simple parallel system. Given a failure rate g and repair rate t (for the purpose of
illustration, consider identical failure and repair rates for all processors), the
availability of processor Proci is given by,
A ¼t
gþ t: (11:1)
The availability of the parallel system is then given by [16],
A ¼ 1 �Yn
i¼1
(1 � Ai) ¼ 1 �
g
gþ t
� �n
: (11:2)
11.2.2.2 Fault Trees A fault tree [16], like a RBD, is useful for availability
analysis. It is a pictorial representation of the sequence of events/conditions to be
satisfied for a failure to occur. A fault tree uses and, or and k of n gates to represent
this combination of events in a tree-like structure. To represent situations where one
failure event propagates failure along multiple paths in the fault tree, fault trees can
have repeated nodes. Several efficient algorithms for solving fault trees exist. These
include algorithms for fault trees without repeated components [11], a multiple vari-
able inversion (MVI) algorithm called the LT algorithm to obtain sum of disjoint
products (SDP) from mincut set [15], and the factoring/conditioning algorithm
that works by factoring a fault tree with repeated nodes into a set of fault trees with-
out repeated nodes [19]. Binary decision diagram (BDD)-based algorithms can be
used to solve very large fault trees [5, 6, 22, 28]. Figure 11.1(b) shows the fault
tree model for our multiprocessor system. UAi represents the unavailability of
processor i. The and gate indicates that the multiprocessor system fails when all
the n processors becomes unavailable. The output of the top gate of the fault tree
represents failure of the multiprocessor system.
.
.
.
Proc 1A1
(a)(b)
Proc 2A2
Proc nAn
. . .
UA1 UA2 UAn
FAILURE
Figure 11.1 A multiprocessor system (a) Reliability block diagram, (b) Fault tree.
296 AVAILABILITY MODELING IN PRACTICE

11.2.3 State Space Models
RBDs and fault trees cannot easily handle more complex situations such as failure/repair dependencies and shared repair facilities. In such cases, more detailed models
such as state space models are required. Here, we discuss some Markovian state
space models [3, 25].
11.2.3.1 Markov Chains In this section, we consider homogeneous Markov
chains. A homogeneous continuous time Markov chain (CTMC) [25] is a state
space model, in which each state represents various conditions of the system. In
homogeneous CTMCs, transitions from one state to another occur after a time
that is exponentially distributed. The arcs representing a transition from one state
to another are labeled by the constant rate corresponding to the exponentially
distributed time of the transition. If a state in the CTMC has no transitions leaving
it, then that state is called an absorbing state, and a CTMC with one or more such
states is said to be an absorbing CTMC. For the multiprocessor example, we now
illustrate how a Markov chain can be developed to capture shared repair and
multiple failure modes.
The parameters associated with a system availability model that we will now
develop for our multiprocessor system are the failure rate g of each processor and
the processor repair rate t. The processor fault is covered with probability c and
not covered with probability 1–c. After a covered fault, the system is up in a
degraded mode after a reconfiguration delay. On the other hand, an uncovered
fault is followed by a longer delay imposed by a reboot action. The reconfiguration
and reboot delays are assumed to be exponentially distributed with means 1/d and
1/b, respectively. In practice, the reconfiguration and reboot times are extremely
small compared with the times between failures and repairs; hence, we assume
that failures and repairs do not occur during these actions. System availability can
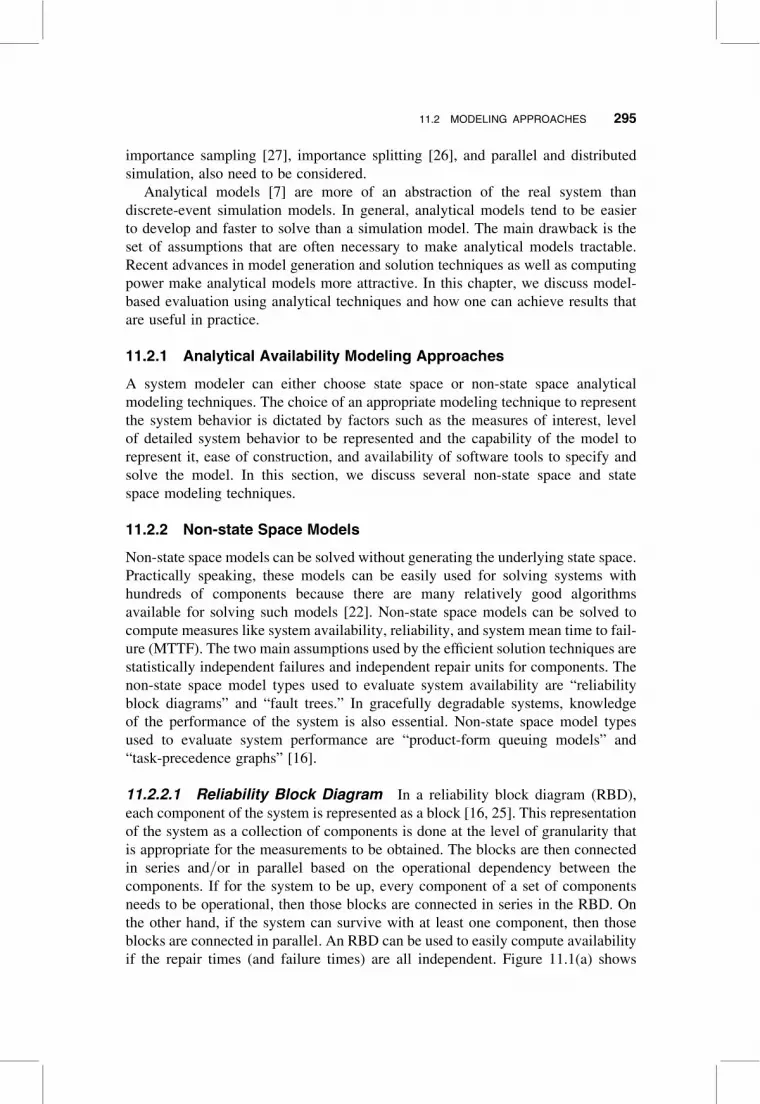
be modeled using the Markov chain shown in Fig. 11.2.
For the system to be up, at least one processor out of the n processors needs
to be operational. The state i, 1 � i � n in the Markov model represents that i pro-
cessors are operational and that n 2 i processors are waiting for on-line repair. The
states Xn2i and Yn2i , for i ¼ 0, . . . , n 2 2, represent that a system is undergoing a
reconfiguration and is being rebooted, respectively. The steady-state probabilities
1 0n-2n-1n
n c
(1-c)
τ
β
δ (n-1)γ
γn
γ c
(n-1) γ (1-c)
τ
β
δ γ
τ
Xn
Yn
Xn-1
Yn-1
. . .
Figure 11.2 Multiprocessor Markov chain model.
11.2 MODELING APPROACHES 297
pi for each state i can be computed as [24, 25]
pn�i ¼n!
(n � i)!
g
t
� �i
pn, i ¼ 1, 2, . . . , n
pXn�i¼
n!
(n � i)!
g(n � i)c
d
g
t
� �i
pn, i ¼ 0,1, . . . ; n � 2 (11:3)
pYn�i¼
n!
(n � i)!
g(n � i)(1 � c)
b
g
t
� �i
pn, i ¼ 0,1, . . . ; n � 2,
where
pn ¼Xn
i¼0
g
t
� �i n!
(n � i)!þXn�2
i¼0
g
t
� �i g(n � i)cn!
d(n � i)!
"
þXn�2
i¼0
g
t
� �i g(n � i)(1 � c)n!
b(n � i)!
#�1
: (11:4)
The steady state availability, A(n), can be written as,
A(n) ¼Xn�1
i¼0
pn�i ¼
Pn�1i¼0 u i=(n � i)!
Q1
, (11:5)
where u ¼ g/t and
Q1 ¼Xn
i¼0
u i
(n � i)!þXn�2
i¼0
g(n � i)u i
(n � i)!
c
dþ
(1 � c)
b
� �: (11:6)
Then the system unavailability defined as a function of n is given by,
UA(n) ¼ 1 �Pn
i¼1 pi.
11.2.3.2 Markov Reward Models A Markov reward model (MRM) is essen-
tially a Markov chain with “reward rates” ri associated with each state i. This makes
specification of measures of interest more convenient. We can now denote the
reward rate of the CTMC at time t as
Z(t) ¼ rX(t): (11:7)
The expected steady-state reward rate for an irreducible CTMC can be written as
E½Z� ¼ limt!1
E½Z(t)� ¼X
i
ripi: (11:8)
298 AVAILABILITY MODELING IN PRACTICE
By appropriately choosing reward rates (or weights) for each state, the appropriate
measure can be obtained for the model on hand. For example, for the multiprocessor
example of Fig. 11.2, if the reward rates are defined as ri ¼ 1 for states i ¼ 1, . . . , n
and ri ¼ 0; otherwise, the expected steady-state reward rate gives the steady-state
availability.
11.2.3.3 Stochastic Petri Nets and Stochastic Reward Nets A Petri net
[16] is a more concise and intuitive way of representing the situation to be modeled.
It is also useful to automate the generation of large state spaces. A Petri net consists
of places, transitions, arcs, and tokens. Tokens move from one place to another
along arcs through transitions. The number of tokens in the places represents the
marking of a Petri net. If the transition firing times are stochastically timed, the
Petri net is called a stochastic Petri net (SPN). If the transition firing times are expo-
nentially distributed, the underlying reachability graph, representing transitions
from one marking to another, gives the underlying homogeneous CTMC for the situ-
ation being modeled.
When evaluating a system for its availability, it is often also necessary to consider
the performance of the system in each of its operational states. We will now develop
a performance model for the multiprocessor system, which we will use in a later
section. For the multiprocessor system, let us say we are interested in finding the
probability that an incoming task is turned away because all n processors are tied
up by other tasks being processed. The parameters associated with this pure per-
formance model are arrival rate of tasks, service rate of tasks, the number of buffers,
and a deadline on task response times. The performance model assumes that the
arriving task forms a Poisson process with rate l, and the service requirements of
tasks are independent and identically distributed with an exponential distribution
of mean 1/m. A deadline d is associated with each task. Let us also take the
number of buffers available for storing incoming tasks as b. We could use an
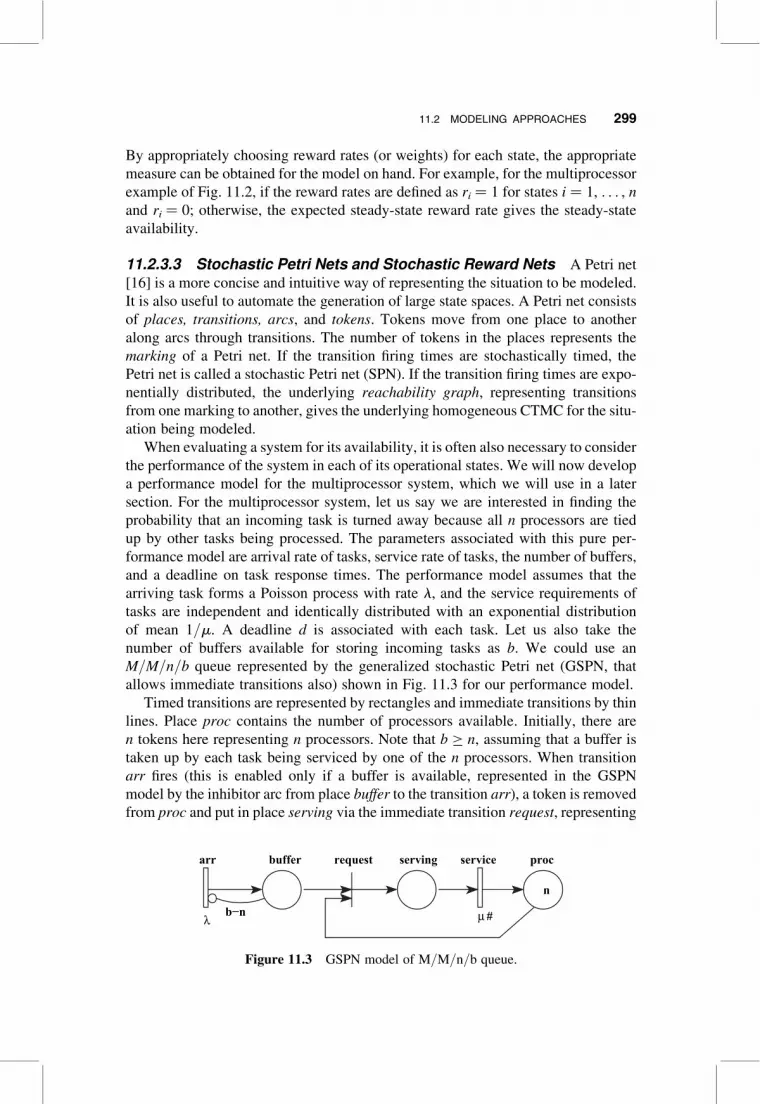
M/M/n/b queue represented by the generalized stochastic Petri net (GSPN, that
allows immediate transitions also) shown in Fig. 11.3 for our performance model.
Timed transitions are represented by rectangles and immediate transitions by thin
lines. Place proc contains the number of processors available. Initially, there are
n tokens here representing n processors. Note that b � n, assuming that a buffer is
taken up by each task being serviced by one of the n processors. When transition
arr fires (this is enabled only if a buffer is available, represented in the GSPN
model by the inhibitor arc from place buffer to the transition arr), a token is removed
from proc and put in place serving via the immediate transition request, representing
arr
b−n
buffer request serving service proc
n
λ µ #
Figure 11.3 GSPN model of M/M/n/b queue.
11.2 MODELING APPROACHES 299
one less free processor. At the same time that this happens, a token is also removed
from place buffer, to denote that the task is not waiting. The immediate transition
request will be enabled if there is at least one token in both place proc and place
buffer. This enforces the condition that, when a task arrives, a processor must be
available. If not, the task waits, represented by the retention of the token in place
buffer. If there are more arrivals when all processors are busy, the buffers start to
fill up. Transition arr is disabled (indicated by the inhibitor arc from place buffer)
when there are b 2 n tokens in place buffer, since there can only be b tasks in the
system: n in place serving that are currently being serviced and b 2 n in place
buffer. Therefore, the probability that an incoming task is rejected is the probability
that transition arr is disabled. Transition service represents the service time for each
task and has a firing rate that depends on the number of tokens in place serving (indi-
cated by the notation m#). That is, if place serving has p tokens, transition service has
a firing rate of pm. The expectation of the firing rate of transition service at steady
state gives the throughput of the multiprocessor system. Several tools such as SPNP
[4] are available for solving stochastic Petri net and stochastic reward net models.
In practical system design, a pure availability model may not be enough for
systems such as gracefully degradable ones. In conjunction with availability, the
performance of the system as it degrades needs to be considered. This requires
a “performability” model [12, 21] that includes both performance and availability
measures. In the next section, we present an example of a system for which a
performability measure is needed.
11.3 COMPOSITE AVAILABILITY AND PERFORMANCE MODEL
Consider the multiprocessor system again but with varying number of processors, n,
each with the same capacity. A key question asked in practice is regarding the
number of processors needed (sizing). As we discuss below, the optimal configur-
ation in terms of the number of processors is a function of the chosen measure of
system effectiveness [24]. We begin our sizing based on measures from a “pure”
availability model. Next, we consider sizing based on system performance
measures. Last, we consider a composite of performance and availability measures
to capture the effect of system degradation.
11.3.1 Multiprocessor Sizing Based on Availability
A CTMC model for the failure/repair characteristics of the multiprocessor system is
shown in Fig. 11.2. The details of the model were discussed in the introduction to
Markov chains in the previous section. The downtime during an observation interval
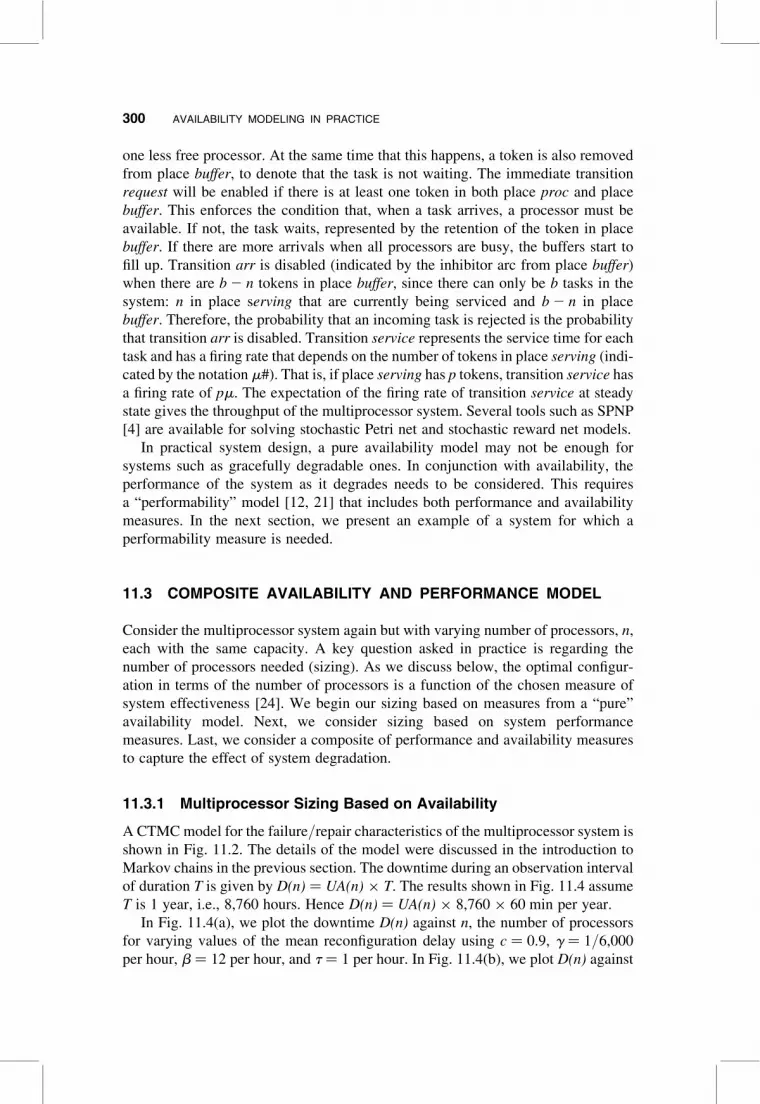
of duration T is given by D(n) ¼ UA(n) � T. The results shown in Fig. 11.4 assume
T is 1 year, i.e., 8,760 hours. Hence D(n) ¼ UA(n) � 8,760 � 60 min per year.
In Fig. 11.4(a), we plot the downtime D(n) against n, the number of processors
for varying values of the mean reconfiguration delay using c ¼ 0.9, g ¼ 1/6,000
per hour, b ¼ 12 per hour, and t ¼ 1 per hour. In Fig. 11.4(b), we plot D(n) against
300 AVAILABILITY MODELING IN PRACTICE
n for different coverage values with a mean reconfiguration delay, d ¼ 10 seconds.
We conclude from these results that the availability benefits of multiprocessing (i.e.,
increase in availability with increase in the number of operational processors) is
possible only if the coverage is near perfect and the reconfiguration delay is very
small or most of the other processors are able to carry out useful work while a
fault is being handled. We further observe that, for most practical parameter
values, the optimal number of processors is 2 or 3. As the number of processors
increases beyond 2, the downtime is mainly due to reconfigurations. Also, the
number of reconfigurations increases almost linearly with the number of processors.
1
10
100
1000
1 2 3 4 5 6 7 8
Dow
ntim
e in
min
s per
yea
r
Number of processors
Mean Reconfiguration Delay = 1 secMean Reconfiguration Delay = 10 secMean Reconfiguration Delay = 30 sec
1 2 3 4 5 6 7 810
-1
101
100
102
Number of processors
Dow
ntim
e in
min
utes
per
yea
r
Coverage = 0.9 Coverage = 0.95Coverage = 0.99
(b)
(a)
Figure 11.4 Downtime Vs. Number of processors for—(a) different mean reconfiguration
delays, (b) different coverage values.
11.3 COMPOSITE AVAILABILITY AND PERFORMANCE MODEL 301
In the next subsection, we consider a performance-based model for the multi-
processor sizing problem.
11.3.2 Multiprocessor Sizing Based on Performance
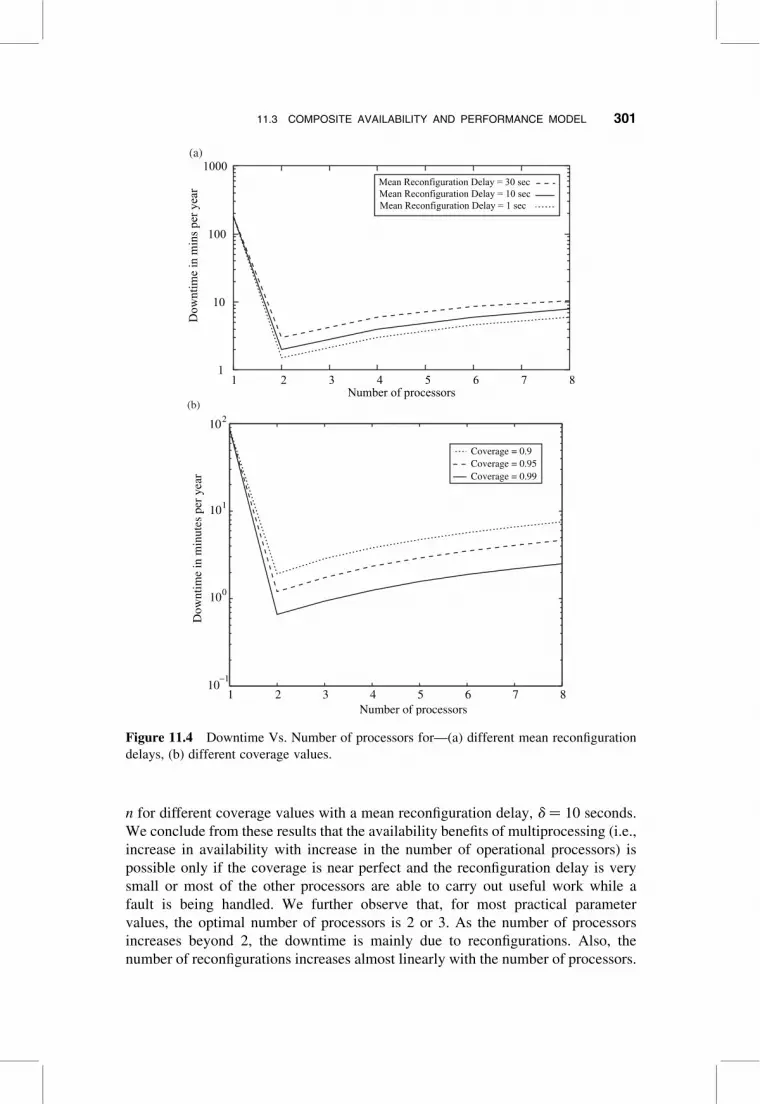
On the lines of the GSPN example discussed in Section 11.2.3, we use an M/M/n/b
queuing model with finite buffer capacity to compute the probability that a task is
rejected because the buffer is full. In Fig. 11.3, this is the probability that transition
arr is disabled. In Fig. 11.5, we plot the loss probability as a function of n for differ-
ent values of arrival rates.
We observe that the loss probability reduces as the number of processors
increases. The conclusion from the performance model of the fault-free system is
that the system improves as the number of processors is increased. The details of
this model and results have been previously presented [24].
The above models point out the deficiency of simply considering a pure avail-
ability or performance measure. The pure availability measure ignores different
levels of performance at various system states, whereas the pure performance
measure ignores the failure/repair behavior of the system. The next section
considers combined measures of performance and availability.
11.3.3 Multiprocessor Sizing Based on Performance and Availability
Different levels of performance can be taken into account by attaching a reward rate
ri corresponding to some measure of performance to each state i of the failure/repair
Markov model in Fig. 11.2. The resulting Markov reward model can then be
analyzed for various combined measures of performance and availability. The sim-
plest reward rate assignment is to let ri ¼ i for states with i operational processors
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8
ytilibaborp ssoL
Number of processors
Arrival Rate = 1/secArrival Rate = 80/secArrival Rate = 180/sec
Figure 11.5 Loss probability Vs. Number of processors.
302 AVAILABILITY MODELING IN PRACTICE

and ri ¼ 0 for down states. With this reward assignment, shown in Table 11.1, we
can compute the capacity-oriented availability, COA(n) as the expected reward
rate in the steady state. This can be written as COA(n) ¼Pn
i¼1 ipi. COA(n) is an
upper bound on system performance that equates performance with system capacity.
Next, let us consider a performance-oriented reward rate assignment.
When i processors are operational, we can use an M/M/i/b queuing model (such
as the GSPN in Fig. 11.3) to describe the performance of the multiprocessor system.
We then assign a reward rate of ri ¼ 0 for each down state i, for all other states, we
assign a reward rate of ri ¼ Tb(i), which is the throughput for a system with i
processors and b buffers (see Table 11.2).
With this assignment, the expected reward rate at steady state computes the
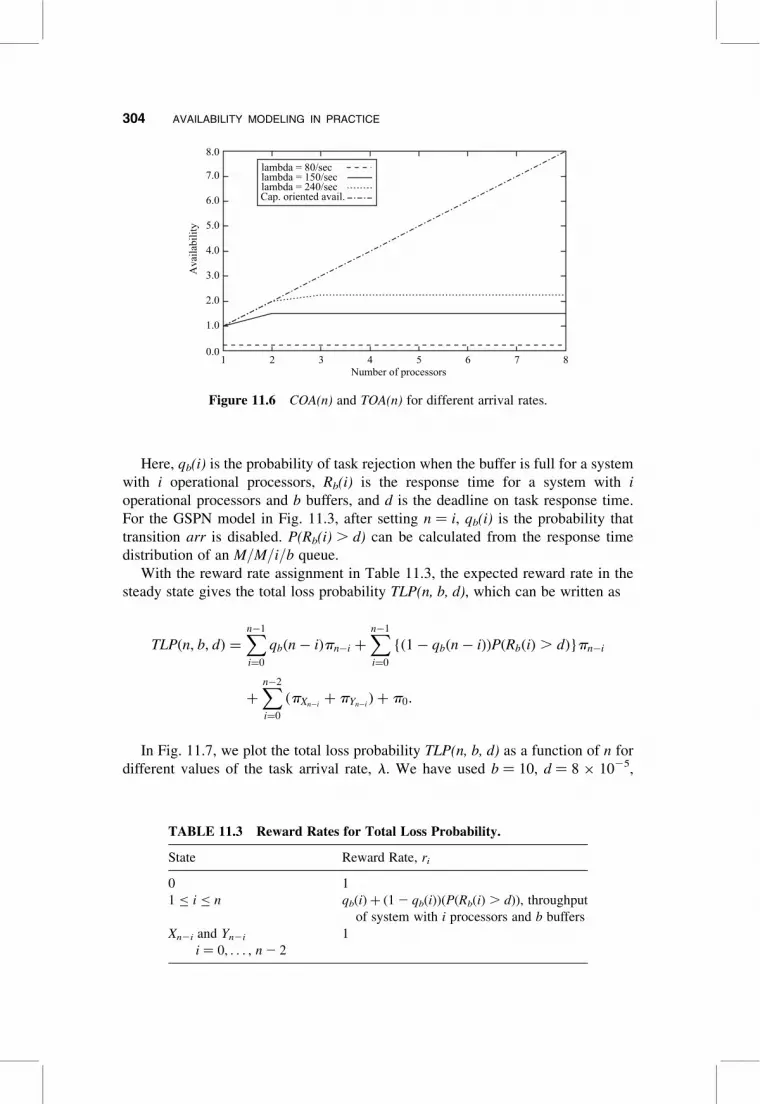
throughput-oriented availability, TOA(n), which can be written as, TOA(n) ¼Pni¼1 Tb(i)pi. In Fig. 11.6, we plot COA(n) and TOA(n) for different values of the
arrival rate l.
These two measures show that in order to process a heavier workload more than
two processors are needed. The measures COA and TOA are not adequate measures
of system effectiveness because they obliterate the effects of failure/repair and
merely show the effects of system capacity and the load. Previously [24], a measure
of system effectiveness, total loss probability, was proposed that “equally” reflected
fault-free behavior and behavior in the presence of faults. The total loss probability
is defined as the sum of rejection probability due to the system being down or
full and the probability of a response time deadline being violated. The total loss
probability is computed by using the following reward rate assignments (also
shown in Table 11.3):
ri ¼1, if i is a down state,
qb(i) þ ½1 � qb(i)�½P(Rb(i) . d)�, if i is an operational state:
�
TABLE 11.1 Reward Rates for COA.
State Reward Rate, ri
0 0
1 � i � n i
Xn2i and Yn2i; i ¼ 0, . . . , n 2 2 0
TABLE 11.2 Reward Rates for TOA.
State Reward Rate, ri
0 0
1 � i � n Tb(i), throughput of system with
i processors and b buffers
Xn2i and Yn2i; i ¼ 0, . . . , n 2 2 0
11.3 COMPOSITE AVAILABILITY AND PERFORMANCE MODEL 303
Here, qb(i) is the probability of task rejection when the buffer is full for a system
with i operational processors, Rb(i) is the response time for a system with i
operational processors and b buffers, and d is the deadline on task response time.
For the GSPN model in Fig. 11.3, after setting n ¼ i, qb(i) is the probability that
transition arr is disabled. P(Rb(i) . d) can be calculated from the response time
distribution of an M/M/i/b queue.
With the reward rate assignment in Table 11.3, the expected reward rate in the
steady state gives the total loss probability TLP(n, b, d), which can be written as
TLP(n, b, d) ¼Xn�1
i¼0
qb(n � i)pn�i þXn�1
i¼0
{(1 � qb(n � i))P(Rb(i) . d)}pn�i
þXn�2
i¼0
(pXn�iþ pYn�i
) þ p0:
In Fig. 11.7, we plot the total loss probability TLP(n, b, d) as a function of n for
different values of the task arrival rate, l. We have used b ¼ 10, d ¼ 8 � 1025,
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
1 2 3 4 5 6 7 8
Ava
ilabi
lity
Number of processors
lambda = 80/seclambda = 150/seclambda = 240/secCap. oriented avail.
Figure 11.6 COA(n) and TOA(n) for different arrival rates.
TABLE 11.3 Reward Rates for Total Loss Probability.
State Reward Rate, ri
0 1
1 � i � n qb(i) þ (1 2 qb(i))(P(Rb(i) . d)), throughput
of system with i processors and b buffers
Xn2i and Yn2i
i ¼ 0, . . . , n 2 2
1
304 AVAILABILITY MODELING IN PRACTICE

and m ¼ 100 per second. We see that, as the value of l increases, the optimal
number of processors, n�, increases as well. For instance, n� ¼ 4 for l ¼ 20,
n� ¼ 5 for l ¼ 40, n� ¼ 6 for l ¼ 60. (Note that n� ¼ 2 for l ¼ 0 from
Fig. 11.4.) The model can be used to show that the optimal number of processors
increases with the task arrival rate, tighter deadlines, and smaller buffer spaces.
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY
In this section, we discuss a case study to demonstrate that, in practice, the choice of
an appropriate model type is dictated by the availability measures of interest, the
level of detailed system behavior to be represented, ease of model specification
and solution, representation power of the model type selected, and access to suitable
tools or toolkits that can automate model specification and solution.
In particular we describe the availability models for Digital Equipment Corpor-
ation’s (DEC) VAXcluster system. VAXclusters are used in different application
environments; hence, several availability, reliability, and performability measures
need to be computed. VAXclusters used as commercial computer systems in a
general data processing environment require us to evaluate system availability
and performability measures. To consider VAXclusters in highly critical appli-
cations, such as life support systems and financial data processing systems, we
evaluate many system reliability measures. These two measures were not adequate
for some financial institution customers of VAXclusters. We therefore evaluated
1 2 3 4 5 6 7 80.9964
0.9966
0.9968
0.997
0.9972
0.9974
0.9976
0.9978
0.998
0.9982
0.9984
Number of processors
Tota
l los
s pr
obab
ility
λ = 20λ = 40λ = 60
Figure 11.7 Total loss probability Vs. number of processors for different task arrival rates.
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 305
task completion measures to compute probability of application interruption during
its execution period.
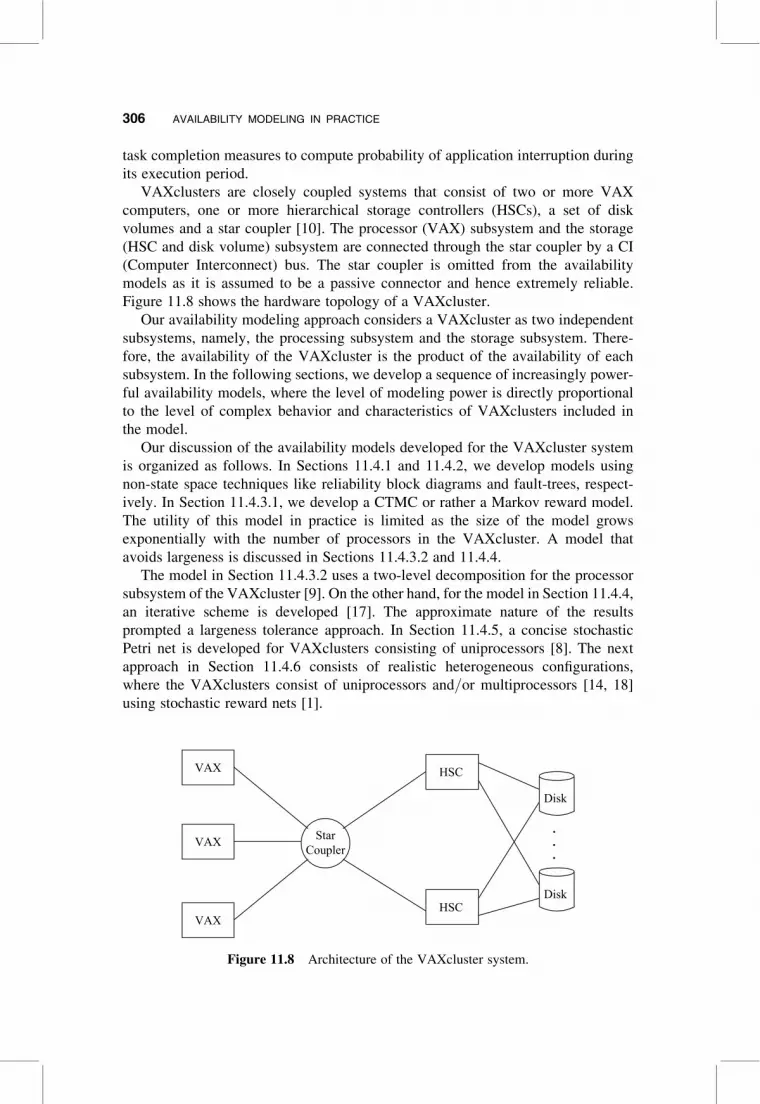
VAXclusters are closely coupled systems that consist of two or more VAX
computers, one or more hierarchical storage controllers (HSCs), a set of disk
volumes and a star coupler [10]. The processor (VAX) subsystem and the storage
(HSC and disk volume) subsystem are connected through the star coupler by a CI
(Computer Interconnect) bus. The star coupler is omitted from the availability
models as it is assumed to be a passive connector and hence extremely reliable.
Figure 11.8 shows the hardware topology of a VAXcluster.
Our availability modeling approach considers a VAXcluster as two independent
subsystems, namely, the processing subsystem and the storage subsystem. There-
fore, the availability of the VAXcluster is the product of the availability of each
subsystem. In the following sections, we develop a sequence of increasingly power-
ful availability models, where the level of modeling power is directly proportional
to the level of complex behavior and characteristics of VAXclusters included in
the model.
Our discussion of the availability models developed for the VAXcluster system
is organized as follows. In Sections 11.4.1 and 11.4.2, we develop models using
non-state space techniques like reliability block diagrams and fault-trees, respect-
ively. In Section 11.4.3.1, we develop a CTMC or rather a Markov reward model.
The utility of this model in practice is limited as the size of the model grows
exponentially with the number of processors in the VAXcluster. A model that
avoids largeness is discussed in Sections 11.4.3.2 and 11.4.4.
The model in Section 11.4.3.2 uses a two-level decomposition for the processor
subsystem of the VAXcluster [9]. On the other hand, for the model in Section 11.4.4,
an iterative scheme is developed [17]. The approximate nature of the results
prompted a largeness tolerance approach. In Section 11.4.5, a concise stochastic
Petri net is developed for VAXclusters consisting of uniprocessors [8]. The next
approach in Section 11.4.6 consists of realistic heterogeneous configurations,
where the VAXclusters consist of uniprocessors and/or multiprocessors [14, 18]
using stochastic reward nets [1].
.
.
.StarCoupler
VAX
VAX
VAX
HSC
HSC
Disk
Disk
Figure 11.8 Architecture of the VAXcluster system.
306 AVAILABILITY MODELING IN PRACTICE
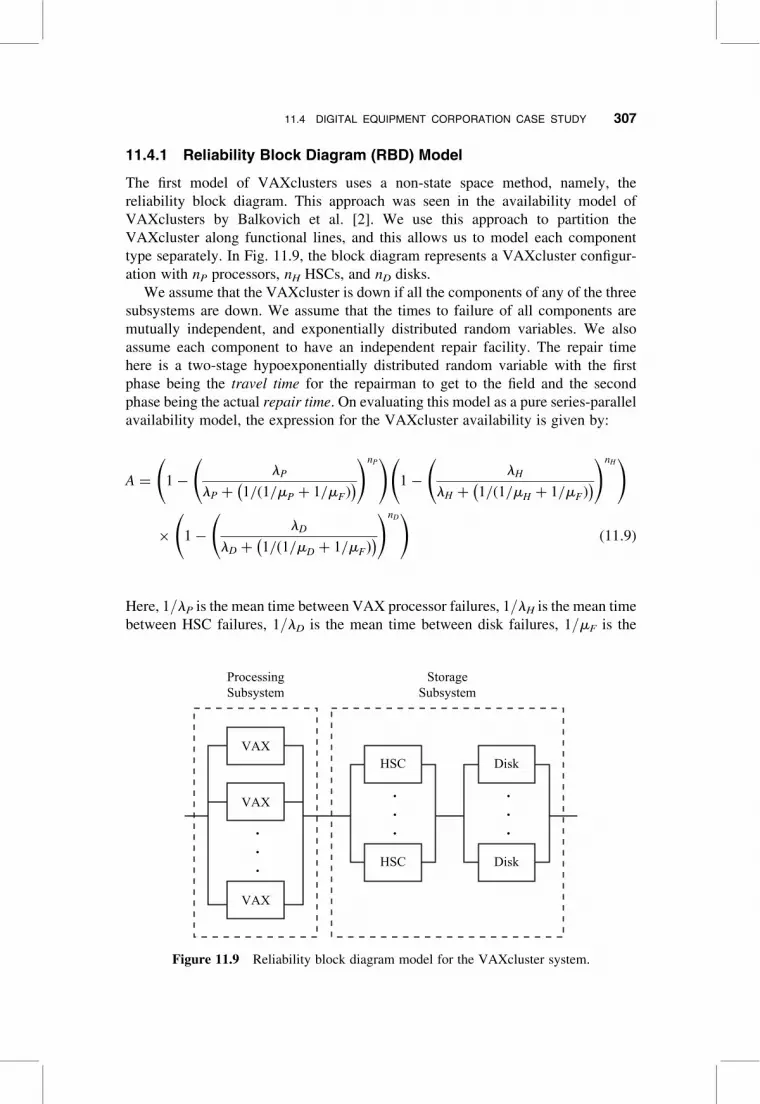
11.4.1 Reliability Block Diagram (RBD) Model
The first model of VAXclusters uses a non-state space method, namely, the
reliability block diagram. This approach was seen in the availability model of
VAXclusters by Balkovich et al. [2]. We use this approach to partition the
VAXcluster along functional lines, and this allows us to model each component
type separately. In Fig. 11.9, the block diagram represents a VAXcluster configur-
ation with nP processors, nH HSCs, and nD disks.
We assume that the VAXcluster is down if all the components of any of the three
subsystems are down. We assume that the times to failure of all components are
mutually independent, and exponentially distributed random variables. We also
assume each component to have an independent repair facility. The repair time
here is a two-stage hypoexponentially distributed random variable with the first
phase being the travel time for the repairman to get to the field and the second
phase being the actual repair time. On evaluating this model as a pure series-parallel
availability model, the expression for the VAXcluster availability is given by:
A ¼ 1 �lP
lP þ 1=(1=mP þ 1=mF)� �
!nP !
1 �lH
lH þ 1=(1=mH þ 1=mF)� �
!nH !
� 1 �lD
lD þ 1=ð1=mD þ 1=mFÞ� �
!nD !
(11:9)
Here, 1/lP is the mean time between VAX processor failures, 1/lH is the mean time
between HSC failures, 1/lD is the mean time between disk failures, 1/mF is the
.
.
.
.
.
.
.
.
.
VAX
VAX
VAX
HSC
HSC
Disk
Disk
ProcessingSubsystem
StorageSubsystem
Figure 11.9 Reliability block diagram model for the VAXcluster system.
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 307
mean field service travel time, and 1/mP, 1/mH , and 1/mD are the mean time to
repair a VAX processor, HSC, and disk, respectively.
The assumption that a VAXcluster is down when all the components of any of
the three subsystems are down is not in tune with reality. For a VAXcluster to be
operational, the system should meet quorum, where quorum is the minimum
number of VAXs required for the VAXcluster to function.
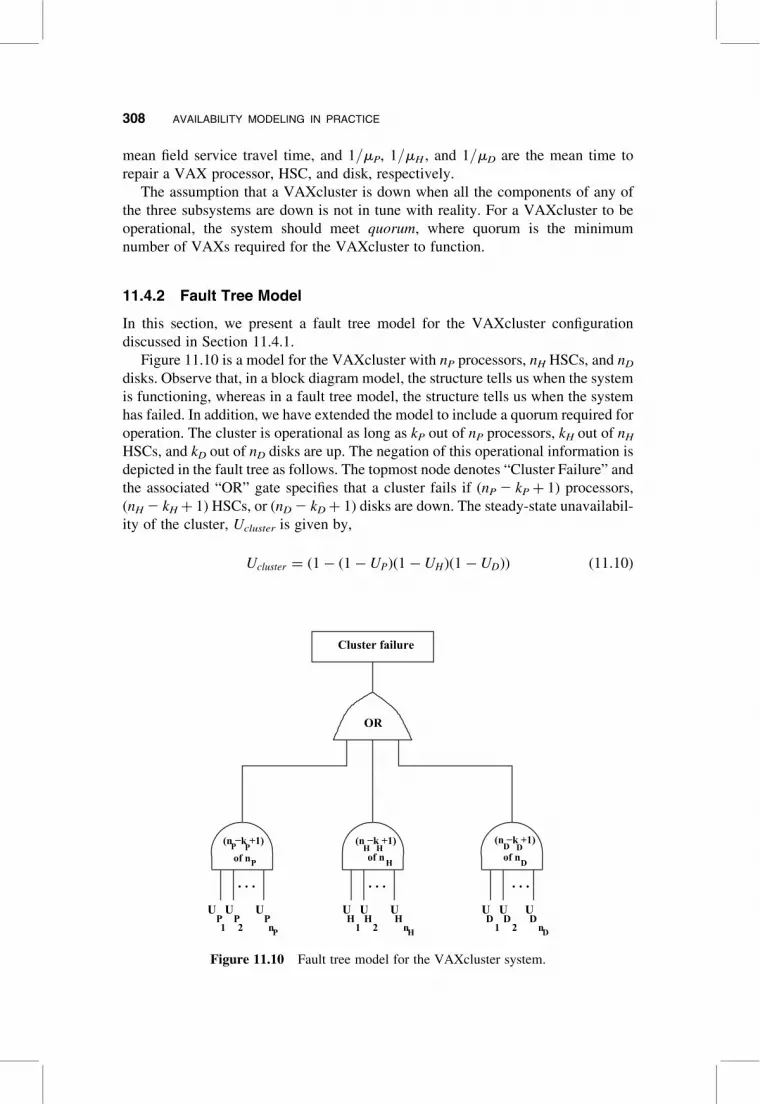
11.4.2 Fault Tree Model
In this section, we present a fault tree model for the VAXcluster configuration
discussed in Section 11.4.1.
Figure 11.10 is a model for the VAXcluster with nP processors, nH HSCs, and nD
disks. Observe that, in a block diagram model, the structure tells us when the system
is functioning, whereas in a fault tree model, the structure tells us when the system
has failed. In addition, we have extended the model to include a quorum required for
operation. The cluster is operational as long as kP out of nP processors, kH out of nH
HSCs, and kD out of nD disks are up. The negation of this operational information is
depicted in the fault tree as follows. The topmost node denotes “Cluster Failure” and
the associated “OR” gate specifies that a cluster fails if (nP 2 kP þ 1) processors,
(nH 2 kH þ 1) HSCs, or (nD 2 kD þ 1) disks are down. The steady-state unavailabil-
ity of the cluster, Ucluster is given by,
Ucluster ¼ (1 � (1 � UP)(1 � UH)(1 � UD)) (11:10)
OR
Cluster failure
. . . . . . . . .
P1
UP
UP
2 n
U U U U U UD D DH H H
1 2 n 1 2 n
U
P DH
of n
(n −k +1)of nH
(n −k +1)
of nDP
(n −k +1)P P H H DD
Figure 11.10 Fault tree model for the VAXcluster system.
308 AVAILABILITY MODELING IN PRACTICE

where, Ui ¼P
jJj�(ni�kiþ1)
Qj[J Uij
� � Qj�J 1 � Uij
� �� �for i ¼ P, H, or D
(processors, HSCs, or disks), and J is the set of indices of all functioning
components.
The RBD and fault tree VAXcluster availability models are very limited in their
depiction of the failure/recovery behavior of the VAXcluster. For example, they
assume that each component has its own repair facility and that there is only one
failure/recovery type. In fact, combinatorial models like RBDs, fault trees, and
reliability graphs require system components to behave in a stochastically indepen-
dent manner. Dependencies of many different kinds exist in VAXclusters and hence
combinatorial models are not entirely satisfactory for such systems. State space
modeling techniques like Markovian models can include different kinds of depen-
dencies. In the following sections, we develop state space models for the processing
subsystem and the storage subsystem separately and use a hierarchical technique to
combine the models of the two subsystems to obtain an overall system availability
model.
11.4.3 Availability Model for the VAXcluster Processing Subsystem
11.4.3.1 Continuous Time Markov Chain We now develop a more detailed
continuous time Markov chain (CTMC) model for the VAXcluster, showing two
types of failure and a coverage factor for each failure type. By using a state space
model, we are also able to incorporate shared repair for the processors in a cluster.
We assumed that the times between failures, the repair times and other recovery
times are exponentially distributed and developed an availability model for an
n-processor (n � 2) VAXcluster using a homogeneous continuous-time Markov
chain. A CTMC for a 2-processor VAXcluster developed previously [8] is shown
in Fig. 11.11.
The following behavior is characterized in this CTMC. A covered processor
failure causes a brief (in the order of seconds) cluster outage to reconfigure the
failed processor out of the cluster and back into the cluster after it is fixed (a perma-
nent failure requires a physical repair while an intermittent failure requires a pro-
cessor reboot). Thus, if a quorum is still formed by the operational processors,
a covered failure causes a small loss in system time. An uncovered failure causes
a longer system time because it requires a cluster reboot; that is, each processor
is rebooted and the cluster is formed even if the remaining operational processors
still form quorum. If the uncovered failure is permanent, the failed processor is
mapped out of the cluster during the reboot and reconfigured back into the cluster
after a physical repair. On the other hand, if the uncovered failure is intermittent,
the cluster is operational after a cluster reboot. The permanent and intermittent
mean failure times are 1/lp and 1/lI hours, respectively. The mean repair, mean
processor reboot, and mean cluster reboot times are given by 1/mp, 1/mPB,
1/mCB, respectively. Let c and k denote the coverage factors for permanent
and intermittent failures respectively. Realistically, the mean reconfiguration time
(1/mIN) to map a processor into the cluster and the time (1/mOUT) to map it out
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 309
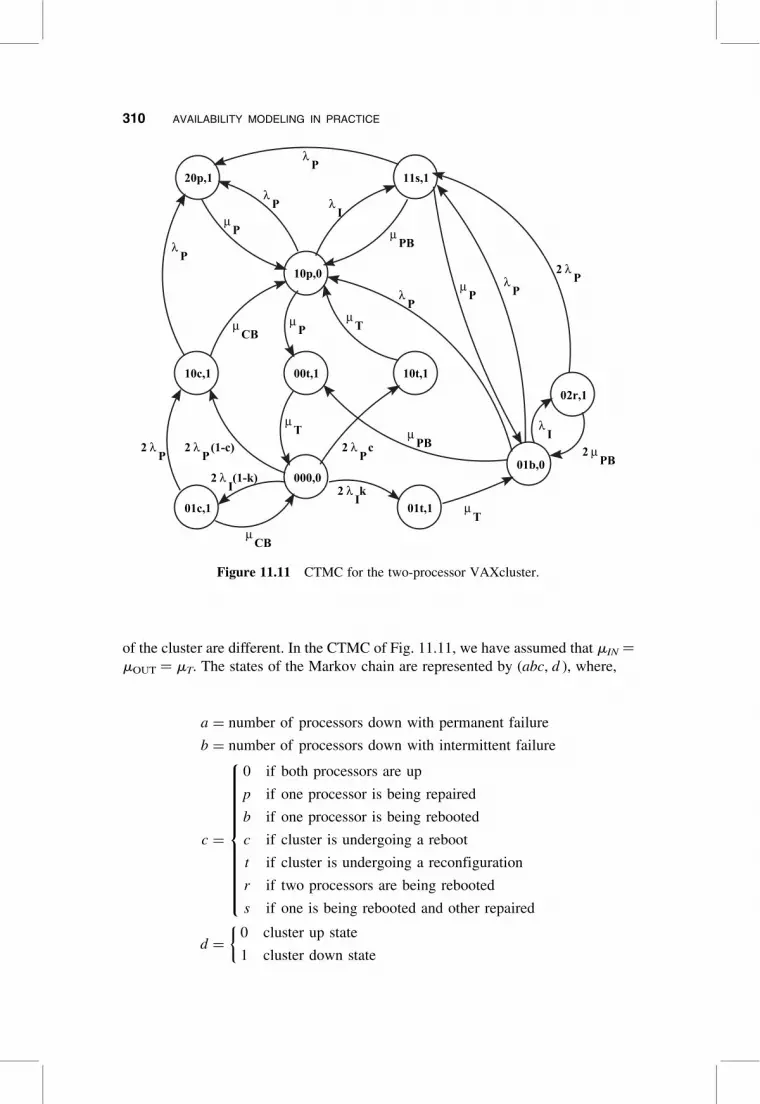
of the cluster are different. In the CTMC of Fig. 11.11, we have assumed that mIN ¼
mOUT ¼ mT. The states of the Markov chain are represented by (abc, d ), where,
a ¼ number of processors down with permanent failure
b ¼ number of processors down with intermittent failure
c ¼
0 if both processors are up
p if one processor is being repaired
b if one processor is being rebooted
c if cluster is undergoing a reboot
t if cluster is undergoing a reconfiguration
r if two processors are being rebooted
s if one is being rebooted and other repaired
8>>>>>>>>>>><>>>>>>>>>>>:
d ¼0 cluster up state
1 cluster down state
�
20p,1
10p,0
10c,1 00t,1 10t,1
01c,1
000,0
01t,1
01b,0
02r,1
11s,1
λP
λP
µP
λP
λP
2 2 λP
(1-c)
2 λI(1-k)
µCB
2 λIk
µT
λI
2 µPB
µP
λP
2 λP
λP
µTµ
P
µT µ
PB2 λP
c
µCB
λI
µPB
Figure 11.11 CTMC for the two-processor VAXcluster.
310 AVAILABILITY MODELING IN PRACTICE
The steady-state availability of the cluster is given by:
Availability ¼ P000,0 þ P10p,0 þ P01b,0 (11:11)
where, Pabc,d denotes the steady-state probability that the process is in state (abc, d ).
We computed the availability of the VAXcluster system by solving the above
CTMC using SHARPE [16], which is a software package for availability/performability analysis. The main problem with this approach was that the size of
the CTMC grew exponentially with the number of processors in the VAXcluster
system. The largeness posed the following challenges: (1) the capability of the
software to solve the model with thousands of states for VAXclusters with n . 5
processors and (2) the problem of actually generating the state space. In the next
section, we address these two drawbacks.
11.4.3.2 Approximate Availability Model for the Processing Sub-system In this section, we discuss a VAXcluster availability model that avoids
the largeness associated with a Markov model. To reduce the complexity of a
large system, Ibe et al. [9] developed a two-level hierarchical model. The bottom
level is a homogeneous CTMC, and the top level is a combinatorial model. This
top-level model was represented as a network of diodes (or three-state devices).
The approximate availability model developed for the analysis made the follow-
ing assumptions [9].
1. The behavior of each processor was modeled by a homogeneous CTMC and
assumed that this processor did not break the quorum rule. This assumption is
justified by the fact that the probability of VAXcluster failure due to loss of
quorum is relatively low.
2. Each processor has an independent repairman. This assumption is justified as
the authors saw that the MTBF was large compared to the MTTR.
These assumptions allowed the authors to decompose the n-processor VAXcluster
into n independent subsystems. Further, the states of the CTMC for the individual
processors were classified into the following three states:
1. X ¼ the set of states in which the processors are up;
2. Y ¼ the set of states in which the cluster is down due to a processor failure; and
3. Z ¼ the set of states in which the processor is down but the cluster is up.
Ibe et al. [9] compared the superstates with the three states of a diode. The three
states X, Y, and Z represent the following states of the diode: up state, the short-
circuit state, and the open-circuit state, respectively. Then the availability, A, of
the VAXcluster was defined as follows [9]:
A ¼ P ½at least one processor in superstate X and none in superstate Y�:
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 311
Let nX , nY , and nZ denote the number of processors in superstates X, Y, and Z,
respectively. Let PX , PY , and PZ denote the probability that a processor is in super-
state X, T, and Z. Ibe et al. [9] thus defined the availability An of an n-processor
VAXcluster as follows:
A ¼Xn
nX¼1
n
nX 0 n � nX
� �PnX
X P0Y Pn�nX
Z
¼Xn
nX¼0
n
nX
� �PnX
X Pn�nX
Z �n!
0!(n � 0)!P0
XPnZ ¼ PX þ PZð Þ
n�Pn
Z : (11:12)
Ibe et al. could analyze different VAXcluster configurations by simply varying
the number of processors n in the above equation. The main drawbacks of this
approach are the approximate nature of the solution versus an exact solution, and
the need to make simplifying assumptions, one of the assumptions being an indepen-
dent repairman for each processor. In the next section, we illustrate another approxi-
mation technique to deal with large subsystems.
11.4.4 Availability Model for the VAXcluster Storage Subsystem
We next discuss a novel availability model for VAXclusters with large storage
subsystems. A fixed-point iteration scheme has been used [17] over a set of
CTMC submodels. The decomposition of the model into submodels controlled
the state space explosion, and the iteration modeled the repair priorities between
the different storage components. The model considered configurations with
shadowed (commonly known as mirrored) disks and characterized the system
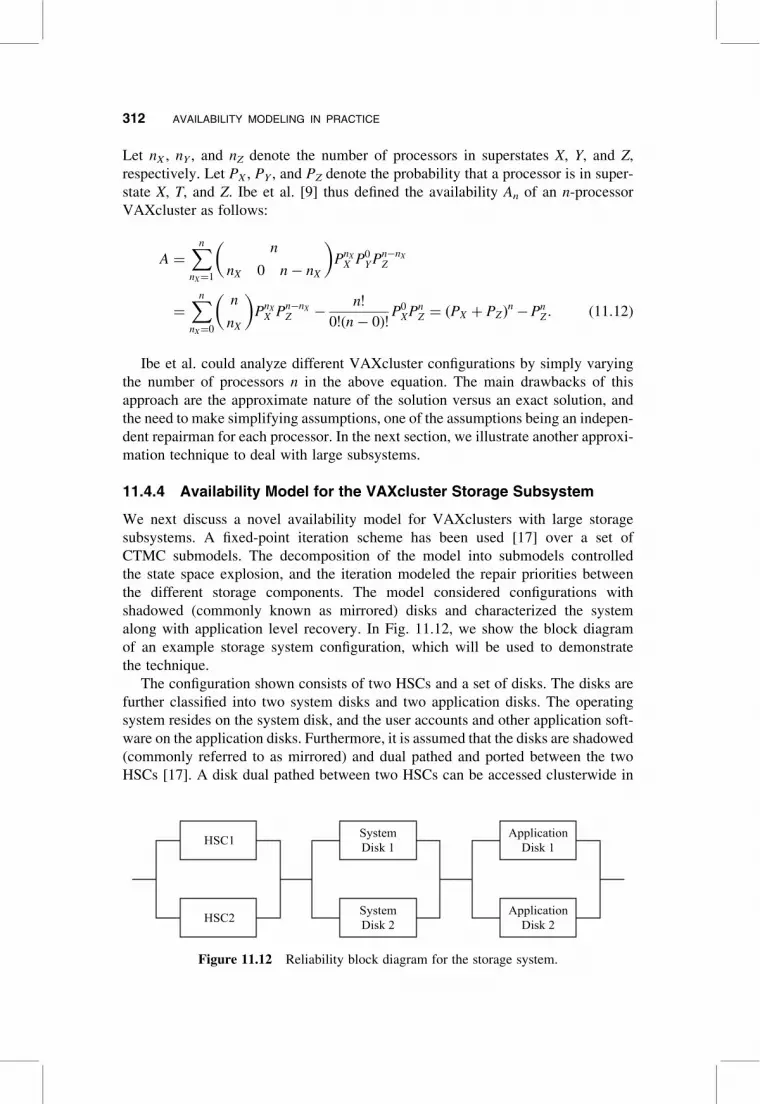
along with application level recovery. In Fig. 11.12, we show the block diagram
of an example storage system configuration, which will be used to demonstrate
the technique.
The configuration shown consists of two HSCs and a set of disks. The disks are
further classified into two system disks and two application disks. The operating
system resides on the system disk, and the user accounts and other application soft-
ware on the application disks. Furthermore, it is assumed that the disks are shadowed
(commonly referred to as mirrored) and dual pathed and ported between the two
HSCs [17]. A disk dual pathed between two HSCs can be accessed clusterwide in
HSC1
HSC2 SystemDisk 2
SystemDisk 1
ApplicationDisk 1
ApplicationDisk 2
Figure 11.12 Reliability block diagram for the storage system.
312 AVAILABILITY MODELING IN PRACTICE
a coordinated way through either HSC. In case one of the HSC fails, a dual ported
disk can be accessed through the other HSC after a brief failover period.
We now discuss the sequence of approximation models developed to compute the
availability of the storage system in Fig. 11.12. The first model assumed that each
component in the block diagram has its own repair facility. We assumed that the
repair time is a two-stage hypoexponentially distributed random variable with the
first phase being the travel time and the second phase being the actual repair
time. This model can be solved as a pure series-parallel availability model to
compute the availability of the storage system, similar to the solution of the RBD
in Section 11.4.1.
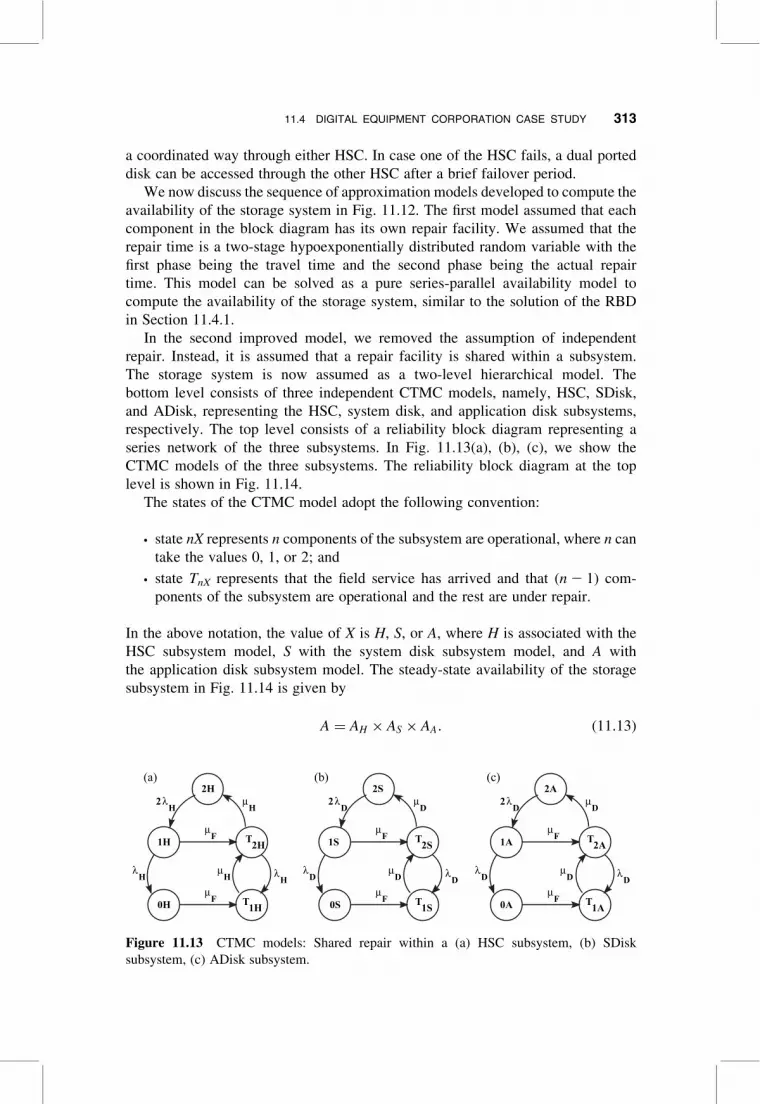
In the second improved model, we removed the assumption of independent
repair. Instead, it is assumed that a repair facility is shared within a subsystem.
The storage system is now assumed as a two-level hierarchical model. The
bottom level consists of three independent CTMC models, namely, HSC, SDisk,
and ADisk, representing the HSC, system disk, and application disk subsystems,
respectively. The top level consists of a reliability block diagram representing a
series network of the three subsystems. In Fig. 11.13(a), (b), (c), we show the
CTMC models of the three subsystems. The reliability block diagram at the top
level is shown in Fig. 11.14.
The states of the CTMC model adopt the following convention:
. state nX represents n components of the subsystem are operational, where n can
take the values 0, 1, or 2; and
. state TnX represents that the field service has arrived and that (n 2 1) com-
ponents of the subsystem are operational and the rest are under repair.
In the above notation, the value of X is H, S, or A, where H is associated with the
HSC subsystem model, S with the system disk subsystem model, and A with
the application disk subsystem model. The steady-state availability of the storage
subsystem in Fig. 11.14 is given by
A ¼ AH � AS � AA: (11:13)
2H(a) (b) (c)
1H T2H
0H
H2λ µ
H
Fµ
Fµ
λH H
µ λH
T1H
1S T2S
0S
D2λ µ
D
Fµ
Fµ
λD D
µ λD
T1S
2S 2A
1A T2A
0A
D2λ µ
D
Fµ
Fµ
λD D
µ λD
T1A
Figure 11.13 CTMC models: Shared repair within a (a) HSC subsystem, (b) SDisk
subsystem, (c) ADisk subsystem.
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 313
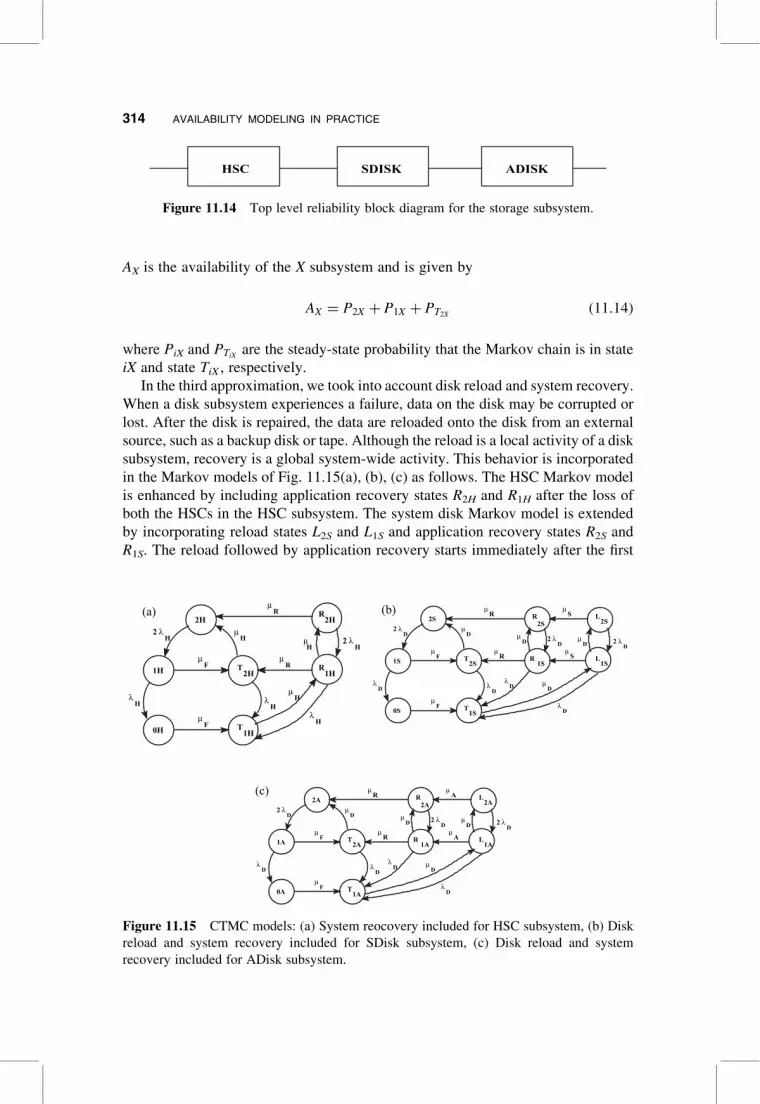
AX is the availability of the X subsystem and is given by
AX ¼ P2X þ P1X þ PT2X(11:14)
where PiX and PTiXare the steady-state probability that the Markov chain is in state
iX and state TiX , respectively.
In the third approximation, we took into account disk reload and system recovery.
When a disk subsystem experiences a failure, data on the disk may be corrupted or
lost. After the disk is repaired, the data are reloaded onto the disk from an external
source, such as a backup disk or tape. Although the reload is a local activity of a disk
subsystem, recovery is a global system-wide activity. This behavior is incorporated
in the Markov models of Fig. 11.15(a), (b), (c) as follows. The HSC Markov model
is enhanced by including application recovery states R2H and R1H after the loss of
both the HSCs in the HSC subsystem. The system disk Markov model is extended
by incorporating reload states L2S and L1S and application recovery states R2S and
R1S. The reload followed by application recovery starts immediately after the first
HSC SDISK ADISK
Figure 11.14 Top level reliability block diagram for the storage subsystem.
(a)2H
1H T2H
0H
2 λ µH
Fµ
F
λH λ
H
1H
µ
H
R
µ
µR
µH
λH
µH
2 λH
T
R2H
1HR
(b)
1S T2S
0S
D2 λ µ
D
Fµ
Fµ
λD λ
D
T1S
2Sµ
R
µR
λD
λD
Dµ
µD 2 λ
Dµ
D 2 λD
Sµ
Sµ
R2S
L
L
R
2S
1S1S
(c)
T2A
0A
D2 λ µ
D
Fµ
Fµ
λD λ
D
T1A
µR
µR
λD
λD
Dµ
µD 2 λ
Dµ
D 2 λD
Aµ
Aµ
R2A
L
L
R
2A
1A1A
2A
1A
Figure 11.15 CTMC models: (a) System reocovery included for HSC subsystem, (b) Disk
reload and system recovery included for SDisk subsystem, (c) Disk reload and system
recovery included for ADisk subsystem.
314 AVAILABILITY MODELING IN PRACTICE
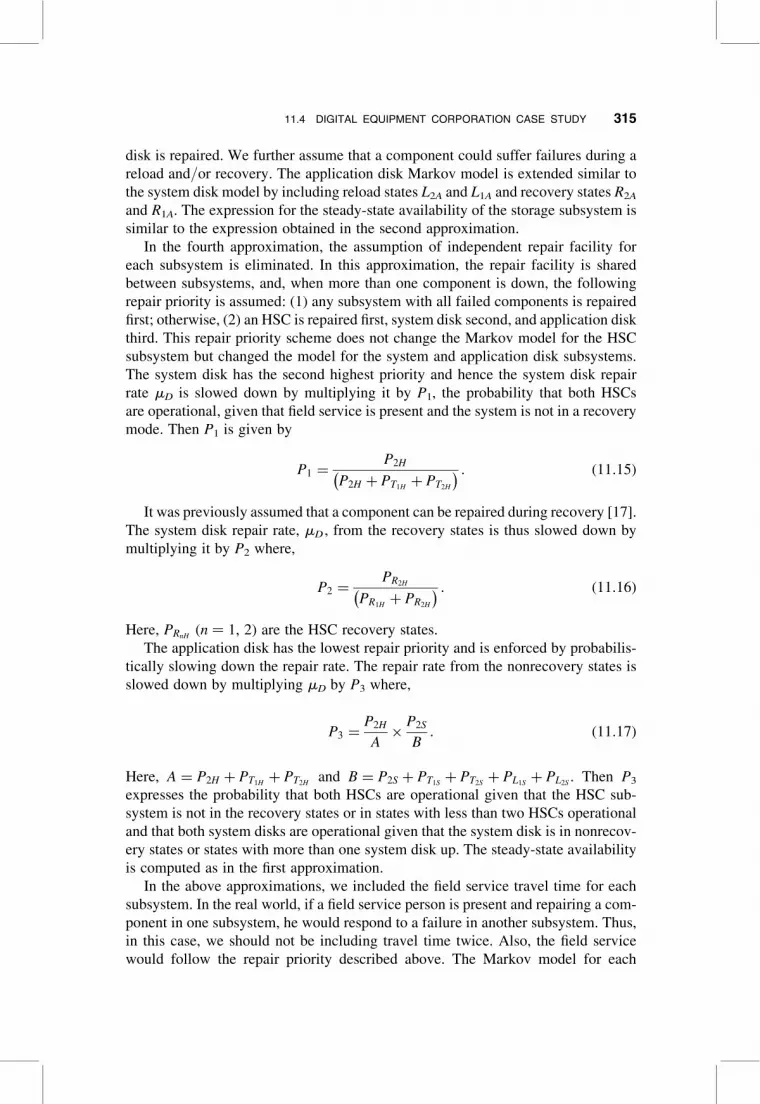
disk is repaired. We further assume that a component could suffer failures during a
reload and/or recovery. The application disk Markov model is extended similar to
the system disk model by including reload states L2A and L1A and recovery states R2A
and R1A. The expression for the steady-state availability of the storage subsystem is
similar to the expression obtained in the second approximation.
In the fourth approximation, the assumption of independent repair facility for
each subsystem is eliminated. In this approximation, the repair facility is shared
between subsystems, and, when more than one component is down, the following
repair priority is assumed: (1) any subsystem with all failed components is repaired
first; otherwise, (2) an HSC is repaired first, system disk second, and application disk
third. This repair priority scheme does not change the Markov model for the HSC
subsystem but changed the model for the system and application disk subsystems.
The system disk has the second highest priority and hence the system disk repair
rate mD is slowed down by multiplying it by P1, the probability that both HSCs
are operational, given that field service is present and the system is not in a recovery
mode. Then P1 is given by
P1 ¼P2H
P2H þ PT1Hþ PT2H
� � : (11:15)
It was previously assumed that a component can be repaired during recovery [17].
The system disk repair rate, mD , from the recovery states is thus slowed down by
multiplying it by P2 where,
P2 ¼PR2H
PR1Hþ PR2H
� � : (11:16)
Here, PRnH(n ¼ 1, 2) are the HSC recovery states.
The application disk has the lowest repair priority and is enforced by probabilis-
tically slowing down the repair rate. The repair rate from the nonrecovery states is
slowed down by multiplying mD by P3 where,
P3 ¼P2H
A�
P2S
B: (11:17)
Here, A ¼ P2H þ PT1Hþ PT2H
and B ¼ P2S þ PT1Sþ PT2S
þ PL1Sþ PL2S
. Then P3
expresses the probability that both HSCs are operational given that the HSC sub-
system is not in the recovery states or in states with less than two HSCs operational
and that both system disks are operational given that the system disk is in nonrecov-
ery states or states with more than one system disk up. The steady-state availability
is computed as in the first approximation.
In the above approximations, we included the field service travel time for each
subsystem. In the real world, if a field service person is present and repairing a com-
ponent in one subsystem, he would respond to a failure in another subsystem. Thus,
in this case, we should not be including travel time twice. Also, the field service
would follow the repair priority described above. The Markov model for each
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 315
subsystem can be modified by iteratively checking the presence of field service
person in the other two Markov models. The field service person is assumed to
wait on site until reload and recovery is completed in the SDisk and ADisk
subsystem and until recovery is completed in the HSC subsystem.
The HSC subsystem is extended as follows. The rate of transition due to a
component failure is probabilistically split using the variable y1 (or 1 2 y1). The
probability that the field service is present for repairing a component in either of
the two disk subsystems is
y1 ¼ (1 � P2S � P1S � P0S) þ (1 � P2A � P1A � P0A)
� ((1 � P2S � P1S � P0S) � (1 � P2A � P1A � P0A)): (11:18)
The initial value of y1 is assumed to be 0 in the first iteration, then the above value of
y1 is used for the next iteration.
The system (application) disk subsystem is extended as follows. The rate of every
transition due to a component failure that occurs in the absence of the repair person
in the system (application) disk subsystem is multiplied by y2 (or 1 2 y2). The
expression for y2 is similar to the expression for y1 except S(A) is replaced by H.
This takes into account that the field service is present in the HSC and/or application
(system) disk subsystem.
In a similar manner, the next approximation refined the model by taking into
account the global nature of system recovery. That is, if a recovery is ongoing in
one subsystem, the other two subsystems are forced to go into recovery. The
approximated effect of global recovery is achieved with an iterative scheme that
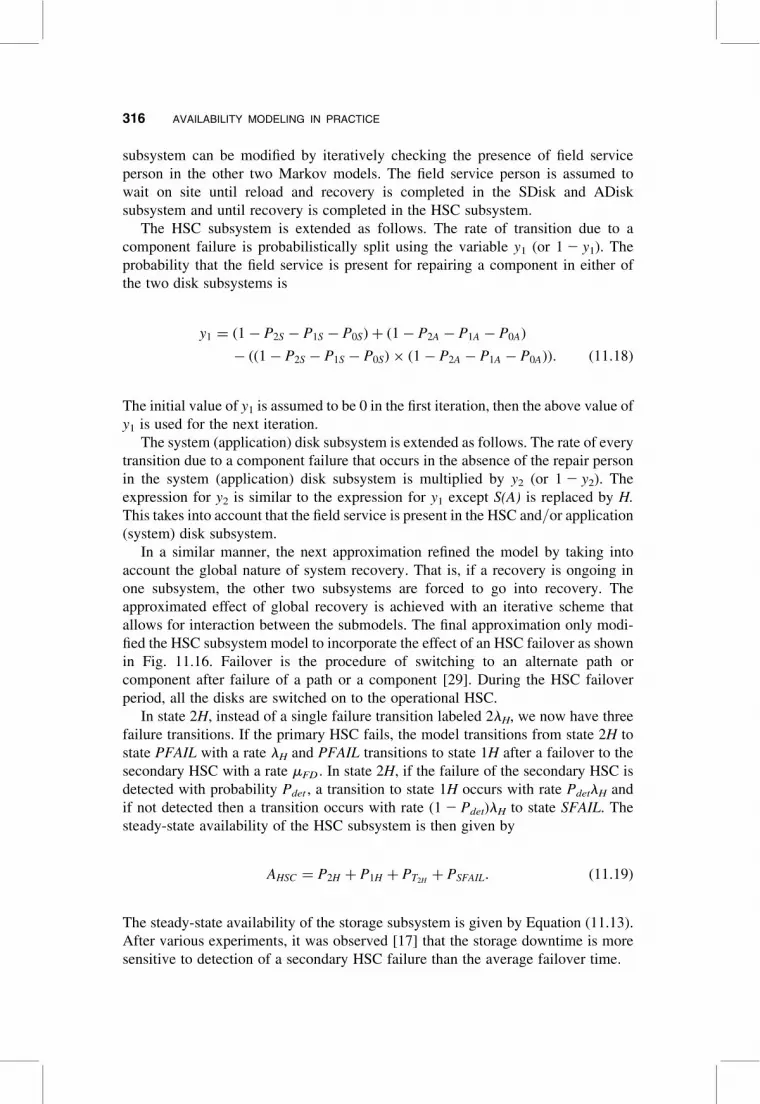
allows for interaction between the submodels. The final approximation only modi-
fied the HSC subsystem model to incorporate the effect of an HSC failover as shown
in Fig. 11.16. Failover is the procedure of switching to an alternate path or
component after failure of a path or a component [29]. During the HSC failover
period, all the disks are switched on to the operational HSC.
In state 2H, instead of a single failure transition labeled 2lH, we now have three
failure transitions. If the primary HSC fails, the model transitions from state 2H to
state PFAIL with a rate lH and PFAIL transitions to state 1H after a failover to the
secondary HSC with a rate mFD . In state 2H, if the failure of the secondary HSC is
detected with probability Pdet , a transition to state 1H occurs with rate PdetlH and
if not detected then a transition occurs with rate (1 2 Pdet)lH to state SFAIL. The
steady-state availability of the HSC subsystem is then given by
AHSC ¼ P2H þ P1H þ PT2Hþ PSFAIL: (11:19)
The steady-state availability of the storage subsystem is given by Equation (11.13).
After various experiments, it was observed [17] that the storage downtime is more
sensitive to detection of a secondary HSC failure than the average failover time.
316 AVAILABILITY MODELING IN PRACTICE
11.4.5 SPN Availability Model
In this section, we discuss a VAXcluster availability model that tolerates largeness
and automates the generation of large Markov models. Ibe et al. [8] used generalized
stochastic Petri nets to model VAXclusters. These authors used the software tool
SPNP [4] to generate and solve the Markov model underlying the SPN. In fact,
the SPN model used [8] allows extensions to permit specifications at the net
level; hence, the resulting model is a stochastic reward net.
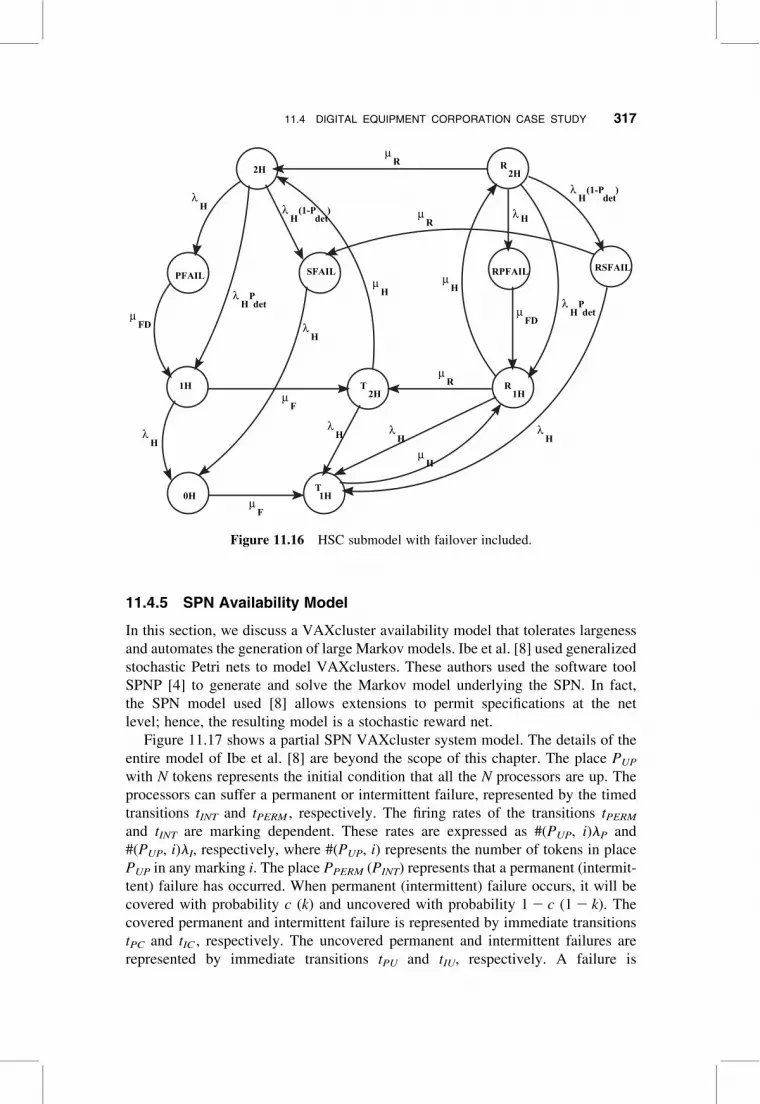
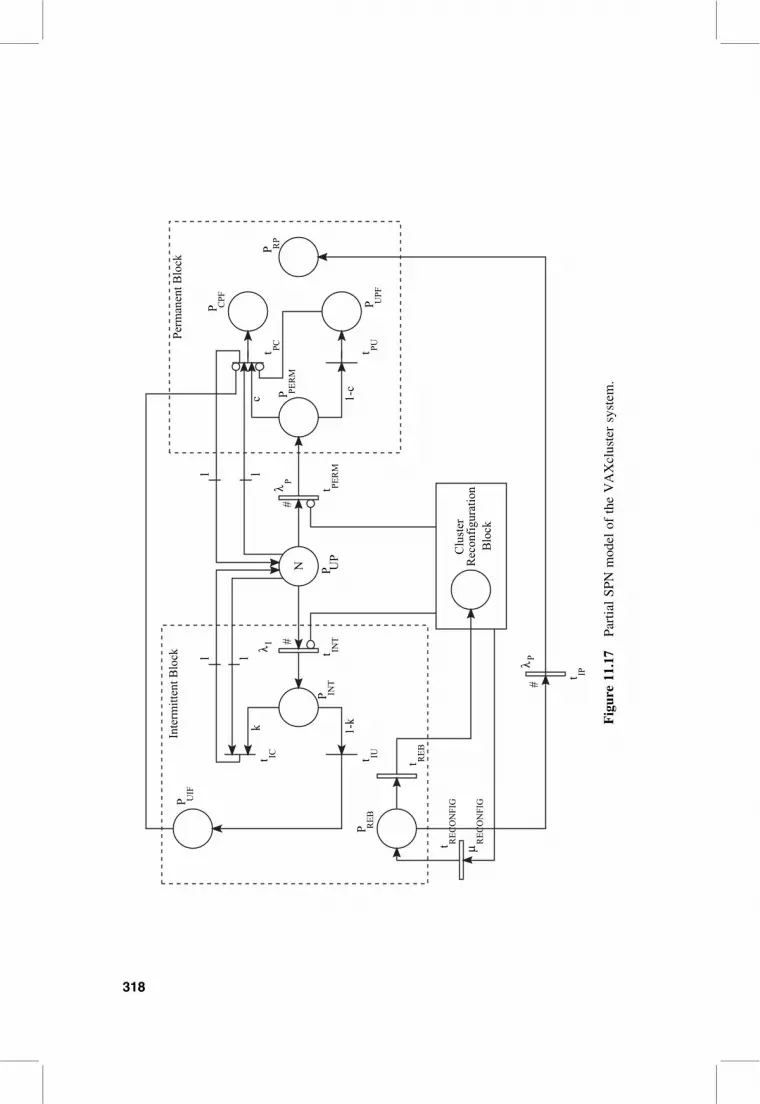
Figure 11.17 shows a partial SPN VAXcluster system model. The details of the
entire model of Ibe et al. [8] are beyond the scope of this chapter. The place PUP
with N tokens represents the initial condition that all the N processors are up. The
processors can suffer a permanent or intermittent failure, represented by the timed
transitions tINT and tPERM , respectively. The firing rates of the transitions tPERM
and tINT are marking dependent. These rates are expressed as #(PUP, i)lP and
#(PUP, i)lI, respectively, where #(PUP, i) represents the number of tokens in place
PUP in any marking i. The place PPERM (PINT) represents that a permanent (intermit-
tent) failure has occurred. When permanent (intermittent) failure occurs, it will be
covered with probability c (k) and uncovered with probability 1 2 c (1 2 k). The
covered permanent and intermittent failure is represented by immediate transitions
tPC and tIC , respectively. The uncovered permanent and intermittent failures are
represented by immediate transitions tPU and tIU, respectively. A failure is
2H
1H
0H
PFAIL SFAIL RPFAIL RSFAIL
R2H
R1H
T2H
T1H
λH
FDµ
λH
λH
Pdet
λH
(1-Pdet
)
λH
µH
µF
µF
λH
µH
λH
Hµ
λ H
µFD
λH
Pdet
λH
(1-Pdet
)
Rµ
Rµ
λH
Rµ
Figure 11.16 HSC submodel with failover included.
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 317
Blo
ck
Clu
ster
Rec
onfig
urat
ion
P UIF
t IC
P INT
t IU
t IP
λ P#
#λ I
l
Inte
rmitt
ent B
lock
#λ P t PE
RM
P PER
M
1-c
t PC t PU
P P UPF
P RP
REB
P
Perm
anen
t Blo
ck
l INT
REB
t
1-k
CPF
N UP
P
kc
l l
t
µ REC
ON
FIG
REC
ON
FIG
t
Figure
11.17
Par
tial
SP
Nm
od
elo
fth
eV
AX
clu
ster
syst
em.
318

considered to be covered only if the number of operational processors is at least l, the
quorum. The input and output arc with multiplicity l from and to the place PUP
ensures quorum maintenance. In Fig. 11.17, the block labeled, “Cluster Reconfi-
guration Block” represents a group of reconfiguration places in the complete
model [8]. In addition, the following behavior is represented by the SPN.
. A covered permanent failure is not possible while the cluster is being rebooted
after an uncovered failure (token in either PUIF or PUPF). This is represented by
an inhibitor arc from PUIF and PUPF to the immediate transition tPC .
. It is assumed that a failure does not occur while the cluster is being reconfi-
gured. This is represented by the inhibitor arcs from the “Cluster Reconfigura-
tion Block” to tPERM and tINT .
. A processor under reboot can suffer a permanent failure. This is represented by
the fact that when there is a token in PREB both the transitions tREB and tIP are
enabled.
The steady-state availability is given by
A ¼Xi[t
ripi, (11:20)
where t is the set of tangible markings and,
ri ¼
1, if(#(PUP, i) � l )^
½#(P of Cluster Reboot Places, i) , 1 _ #(PUIF , i) , 1�^
½#(P Cluster Reconfiguration Block, i) , 1�
0, otherwise
8>><>>:
11.4.6 SPN Availability Model for Heterogeneous VAXclusters
We now present a SPN model that considers realistic VAXcluster configurations
that include uniprocessors and multiprocessors [18]. The heterogeneity in the
model allowed each multiprocessor to contain varying number of processors, and
each VAX in the VAXcluster to belong to different VAX families. Henceforth,
we refer to the SPN model as the heterogeneous model. Throughout this section
we refer to a single multiprocessor system as a machine, which consists of two
components: one or more processors and a platform. The platform consists of the
memory, power, cooling, console interface module, and I/O channel adapters
[18]. As in the uniprocessor case in the above sections, we depict covered and
uncovered permanent and intermittent failures. In addition, we depict the following
failure/recovery behavior for a multiprocessor. A processor failure in a machine
requires a machine reboot to map the faulty processor offline. The entire machine
is not operational during the processor repair and the reboot following the repair.
Before and after every machine reboot, a cluster reconfiguration maps the machine
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 319
out and into the cluster. The platform components of a machine are single points of
failure for that machine [18]. In addition, the following features are included:
. The option of including the quorum disk: a quorum disk acts as a virtual node in
the VAXcluster, casting a “tie-breaker” vote.
. The option of including failure/recovery behavior like unsuccessful repair and
unsuccessful reboots: an unsuccessful repair is modeled by introducing a faulty
repair. Faulty repair means that diagnostics called out a wrong FRU (field
replaceable unit) or that the right FRU was requested but is DOA (dead on
arrival). Unsuccessful reboot means a processor reboot did not complete and
has to be repeated.
. The option of including detailed cluster reconfiguration information: for
example, if the quorum does not exist in reality, the time to form a cluster is
longer than the usual reconfiguration time.
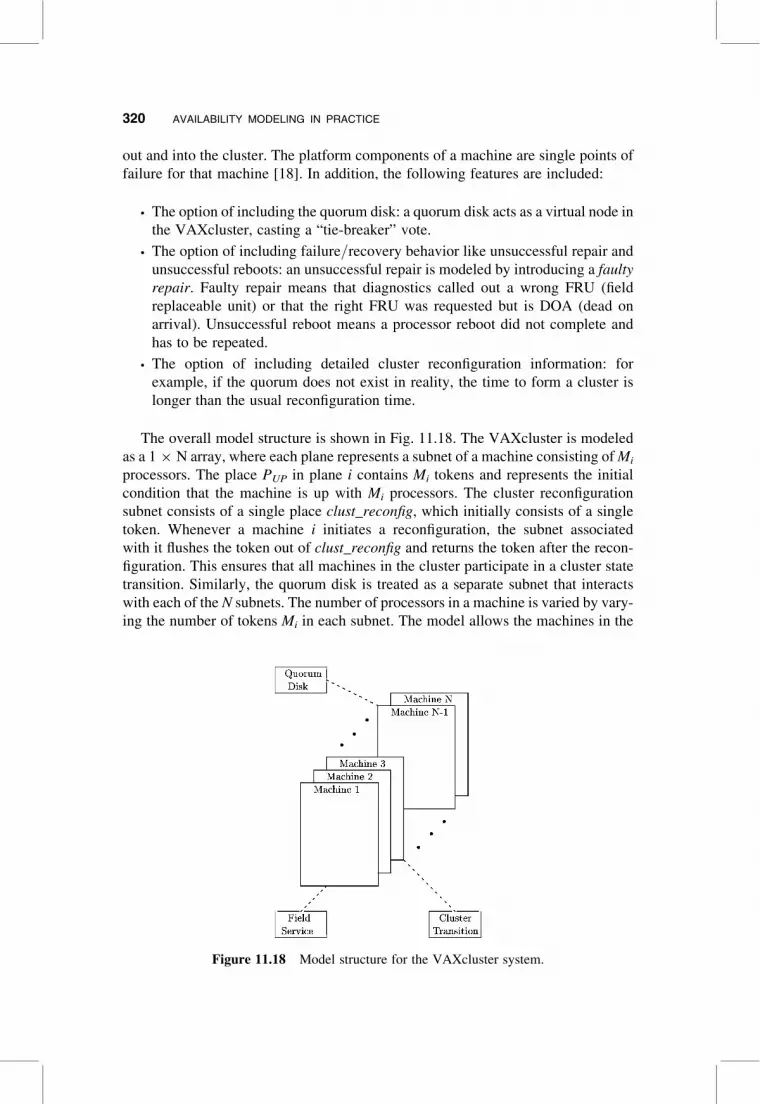
The overall model structure is shown in Fig. 11.18. The VAXcluster is modeled
as a 1 � N array, where each plane represents a subnet of a machine consisting of Mi
processors. The place PUP in plane i contains Mi tokens and represents the initial
condition that the machine is up with Mi processors. The cluster reconfiguration
subnet consists of a single place clust_reconfig, which initially consists of a single
token. Whenever a machine i initiates a reconfiguration, the subnet associated
with it flushes the token out of clust_reconfig and returns the token after the recon-
figuration. This ensures that all machines in the cluster participate in a cluster state
transition. Similarly, the quorum disk is treated as a separate subnet that interacts
with each of the N subnets. The number of processors in a machine is varied by vary-
ing the number of tokens Mi in each subnet. The model allows the machines in the
Figure 11.18 Model structure for the VAXcluster system.
320 AVAILABILITY MODELING IN PRACTICE

cluster to belong to a different VAX series because every subnet handles the failure/recovery behavior of a machine separately. If Mi ¼ 1 in a subnet, then the machine
follows the failure/recovery behavior of a uniprocessor. The detailed subnet associ-
ated with a machine is beyond the scope of this chapter and has been previously
presented [18].
The heterogeneous SPN model included various extensions like variable arcs,
enabling functions or guards, rate type functions, etc., and hence is a Stochastic
Reward Net [1]. For example, when an intermittent covered failure transition
fires, the rate type function for the rate lIC is defined as
if (Mach UP þ (mark(Pqdup) � NQV) � QU)
lIC ¼ lplatint þ (mark(PUP) � lI)
else
lIC ¼ k � (lplatint þ (mark(PUP) � lI)),
where Mach_UP represents the number of machines up in the cluster, lplatint is the
platform intermittent failure rate, lI is the processor intermittent failure rate, and k
is the probability of a covered intermittent failure. The marking, mark(Pqdup) . 1
implies the quorum disk is up and NQV is the number of quorum votes assigned
to the quorum disk. The number of votes needed for the VAXcluster to be oper-
ational is given by QU. On the other hand, the rate type function for an intermittent
uncovered failure rate is given by, lIU ¼ (1 � k) � (lplatint þ (mark(PUP) � lI)).
The heterogeneous VAXcluster model is available if:
1. mark(clust_reconfig) ¼ 1, that is a cluster reconfiguration is not in progress,
2. NU þ (mark(Pqdup) � NQV ) � QU
where NU is obtained using the following algorithm:
Initial: NU ¼ 0
For i ¼ 1, . . . , N
If ((mark(Platform_failure, i) ¼ 0) AND (mark(PUP , i) . 0) AND
Repair and Reboot Transitions Disabled) then
NU ¼ NU þ 1
NU represents that a machine is up if no platform failure has occurred and that at
least one processor is up and repair or reboot is not in progress.
This heterogeneous model was evaluated using the SPNP package [4]. This pack-
age solved the SPN by analyzing the underlying CTMC. We resolved the problem in
the previous study [18] by using a technique that involved the truncation of the state
space [13]. The state space cardinality of the CTMC isomorphic with the hetero-
geneous model increased with the number of machines in the VAXcluster, as well
as the number of processors in each machine. To implement this state space reduction
technique by specifying a truncation level K for processor failures in the model,
the maximum value of K is M1 þ M2 þ � � � þ MN. The value K specifies that the
11.4 DIGITAL EQUIPMENT CORPORATION CASE STUDY 321
reachability graph and hence the corresponding CTMC be generated up to K processor
failures. This is implemented in the model by means of an enabling function associ-
ated with all the failure transitions. The enabling function disables all the failure tran-
sitions ifPN
i¼1 Mi � mark(PUP, i)� �
� K. This technique is justified as follows:
. In real systems, most of the time the system has majority of its components
operational [13]. This means the probability mass is concentrated on a rela-
tively small number of states in comparison to the total number of states in
the model.
. We observed the impact of varying the truncation level on the availability
measures for an example heterogeneous cluster and concluded that the effect
was minimal.
We used the heterogeneous model to not only evaluate measures associated with
standard system availability but also with system reliability and task completion.
In the system reliability class measures, we evaluated measures like frequency of
failures and frequency of disruptive outages. The term disruptive is defined as
follows: any outage that exceeds the specified tolerance limit of the user. The task
completion measures evaluated the probability that the application is interrupted
during its application period.
In this chapter, we discuss an example measure from each of the three classes of
measures [18]:
. Mean Cluster Downtime D in minutes per year: This is a system availability
measure and represents the average amount of time the cluster is not operating
during a one year observation period. Then the expression for D in terms of the
steady state cluster availability, A is given by, D ¼ (1 2 A) � 8760 � 60.
. Frequency of Disruptive Reconfigurations (FDR): This is a system reliability
measure and represents the mean number of reconfigurations which exceed
the specified tolerance duration during the one year observation period.
We evaluate FDR as, FDR ¼ mrg � ethresh�mrg � Prg � 8760 � 60, where mrg
is the cluster reconfiguration (in, out, or formation) rate, thresh is the time
units of the specified tolerance duration on the reconfiguration times, and Prg
is the probability that a reconfiguration is in progress.
. Probability of Task Interruption under Pessimistic Assumption(Prob_Psm): This is a task completion measure. It measures the probability
of a task that initially finds the system available and that needs x hours for
execution, but is interrupted by any failure in the cluster. This is a pessimistic
assumption because the system does not tolerate any interruption including the
brief reconfiguration delays. The expression for Prob_Psm is given by:
Prob Psm ¼
Pj[Upstate 1:0 � e�
PN
k¼1ck,j lp,kþli,kð Þþ lplt,kþlplt int,kð Þð Þx
� �A
Pj,
322 AVAILABILITY MODELING IN PRACTICE
where for machine k, ck,j is the number of operational processors, Pj is the prob-
ability of being in an operational state, lp,k (li,k) is the processor permanent
(intermittent) failure rate, lplt,k (lplt_int,k) is the platform permanent (intermit-
tent) failure rates for machine k, and A is the cluster availability.
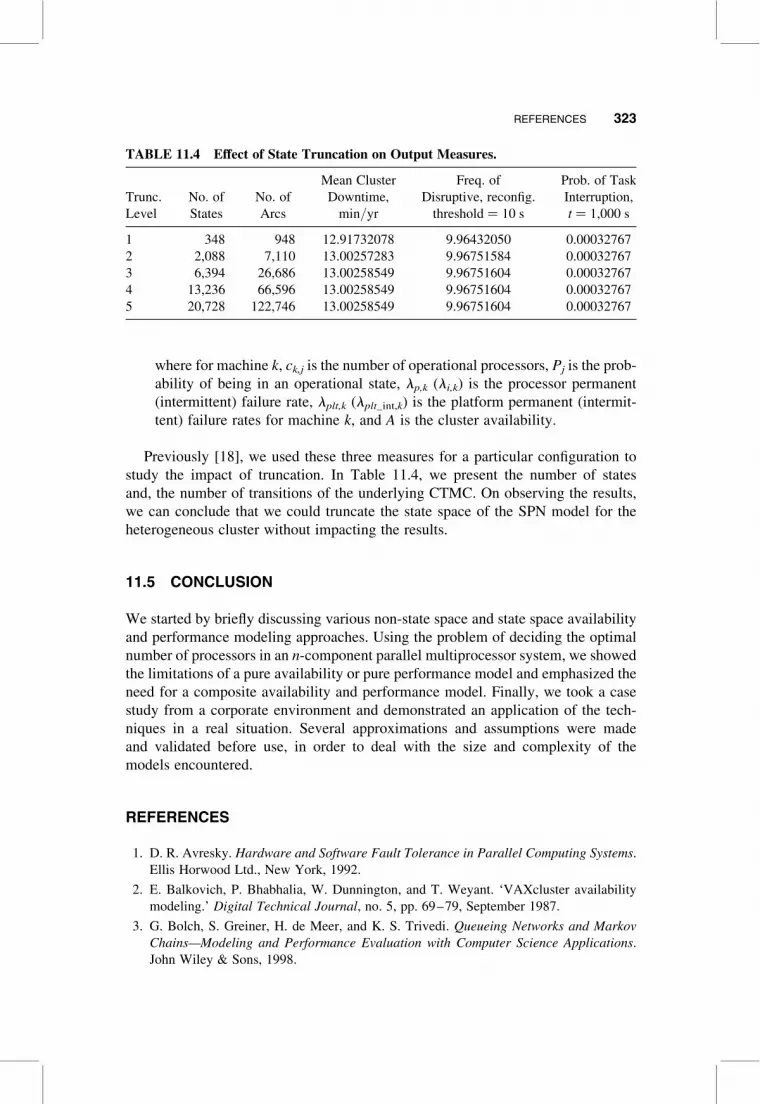
Previously [18], we used these three measures for a particular configuration to
study the impact of truncation. In Table 11.4, we present the number of states
and, the number of transitions of the underlying CTMC. On observing the results,
we can conclude that we could truncate the state space of the SPN model for the
heterogeneous cluster without impacting the results.
11.5 CONCLUSION
We started by briefly discussing various non-state space and state space availability
and performance modeling approaches. Using the problem of deciding the optimal
number of processors in an n-component parallel multiprocessor system, we showed
the limitations of a pure availability or pure performance model and emphasized the
need for a composite availability and performance model. Finally, we took a case
study from a corporate environment and demonstrated an application of the tech-
niques in a real situation. Several approximations and assumptions were made
and validated before use, in order to deal with the size and complexity of the
models encountered.
REFERENCES
1. D. R. Avresky. Hardware and Software Fault Tolerance in Parallel Computing Systems.
Ellis Horwood Ltd., New York, 1992.
2. E. Balkovich, P. Bhabhalia, W. Dunnington, and T. Weyant. ‘VAXcluster availability
modeling.’ Digital Technical Journal, no. 5, pp. 69–79, September 1987.
3. G. Bolch, S. Greiner, H. de Meer, and K. S. Trivedi. Queueing Networks and Markov
Chains—Modeling and Performance Evaluation with Computer Science Applications.
John Wiley & Sons, 1998.
TABLE 11.4 Effect of State Truncation on Output Measures.
Trunc.
Level
No. of
States
No. of
Arcs
Mean Cluster
Downtime,
min/yr
Freq. of
Disruptive, reconfig.
threshold ¼ 10 s
Prob. of Task
Interruption,
t ¼ 1,000 s
1 348 948 12.91732078 9.96432050 0.00032767
2 2,088 7,110 13.00257283 9.96751584 0.00032767
3 6,394 26,686 13.00258549 9.96751604 0.00032767
4 13,236 66,596 13.00258549 9.96751604 0.00032767
5 20,728 122,746 13.00258549 9.96751604 0.00032767
REFERENCES 323

4. G. Ciardo, J. Muppala, and K. S. Trivedi. SPNP: stochastic Petri net package. Proc. Third
Int. Workshop on Petri Nets and Performance Models (PNPM89), Kyoto, Japan,
pp. 142–151, 1989.
5. S. A. Doyle and J. B. Dugan. Dependability assessment using binary decision diagrams.
Proc. 25th Intl. Symposium on Fault Tolerant Computing, pp. 249–258, 1995.
6. S. A. Doyle, J. B. Dugan, and M. Boyd. Combinatorial models and coverage: a binary
decision diagram (BDD) approach. Proc. Annual Reliability and Maintainability
Symposium, pp. 82–89, 1995.
7. K. Goseva-Popstojanova and K. S. Trivedi. Stochastic modeling formalisms for depend-
ability, performance and performability. Performance Evaluation—Origins and Direc-
tions, Lecture Notes in Computer Science (edited by G. Haring, C. Lindemann, and
M. Reiser). Springer Verlag, pp. 385–404, 2000.
8. O. Ibe, A. Sathaye, R. Howe, and K. S. Trivedi. Stochastic Petri net modeling of
VAXcluster system availability. Proc. Third International Workshop on Petri Nets and
Performance Models (PNPM89), Kyoto, Japan, pp. 112–121, 1989.
9. O. C. Ibe, R. C. Howe, and K. S. Trivedi. Approximate availability analysis of
VAXcluster systems. IEEE Transactions on Reliability, vol. 38, no. 1, pp. 146–152,
April 1989.
10. N. P. Kronenberg, H. M. Levy, W. D. Strecker, and R. J. Merwood. VAXclusters: a
closely coupled distributed system. ACM Trans. Computer Systems, vol. 4, pp. 130–146,
May 1986.
11. T. Luo and K. S. Trivedi. ‘An improved algorithm for coherent-system reliability.’ IEEE
Transactions on Reliability, vol. 47, no. 1, pp. 73–78, 1998.
12. J. F. Meyer. On evaluating the performability of degradable computer systems. IEEE
Transactions on Computers, vol. 29, no. 8, pp. 720–731, 1980.
13. R. Muntz, E. de Souza e Silva, and A. Goyal. Bounding availability of repairable com-
puter systems. IEEE Trans. on Computers, vol. 38, no. 12, pp. 1714–1723, December
1989.
14. J. Muppala, A. Sathaye, R. Howe, and K. S. Trivedi. Dependability modeling of a hetero-
geneous VAXcluster system using stochastic reward nets. Hardware and Software Fault
Tolerance in Parallel Computing Systems (edited by D. Avresky). Ellis Horwood Ltd.,
pp. 33–59, 1992.
15. J. Muppala and K. S. Trivedi. Numerical transient solution of finite markovian queueing
systems. Queueing and Related Models (edited by U. N. Bhat and I. V. Basawa). Oxford
University Press, pp. 262–284, 1992.
16. R. Sahner, A. Puliafito, and K. S. Trivedi. Performance and Reliability Analysis of Com-
puter Systems: An Example-Based Approach Using the SHARPE Software Package.
Boston: Kluwer Academic Publishers, 1995.
17. A. Sathaye, K. S. Trivedi, and D. Heimann. Approximate Availability Models of the
Storage Subsystem. Technical Report, DEC., September 1988.
18. A. Sathaye, K. S. Trivedi, and R. Howe. Availability modeling of heterogeneous
VAXcluster systems: a stochastic Petri net approach. Proc. of International Conference
on Fault-Tolerant Systems, Varna, January 1990.
19. A. Satyanarayana and A. Prabhakar. New topological formula and rapid algorithm for
reliability analysis of complex networks. IEEE Transactions on Reliability, vol. 27, pp.
82–100, 1978.
324 AVAILABILITY MODELING IN PRACTICE
20. D. Siewiorek and R. Swarz. The Theory and Practice of Reliable System Design. Digital
Press, 1982.
21. R. M. Smith, K. S. Trivedi, and A. V. Ramesh. Performability analysis: measures, an
algorithm, and a case study. IEEE Transactions on Computers, vol. 37, no. 4, pp.
406–417, April 1988.
22. H. Sun, X. Zang, and K. S. Trivedi. A BDD-based algorithm for reliability analysis of
phased-mission systems. IEEE Transactions on Reliability, vol. 48, no. 1, pp. 50–60,
March 1999.
23. L. Tomek and K. S. Trivedi. Fixed point iteration in availability modeling. In Informatik-
Fachberichte, Fehlertolerierende Rechensysteme (edited by M. Dal Cin). Berlin:
Springer-Verlag, vol. 283, pp. 229–240, 1991.
24. K. S. Trivedi, A. Sathaye, O. Ibe, and R. Howe. Should I add a processor? Proc. 23rd
Annual Hawaii Conference on System Sciences, pp. 214–221, January 1990.
25. K. S. Trivedi. Probability and Statistics with Reliability, Queuing and Computer Science
Applications (2nd ed.). New York: John Wiley & Sons, 2001.
26. B. Tuffin and K. S. Trivedi. Implementation of importance splitting techniques in stochas-
tic Petri net package. Computer Performance Evaluation: Modelling Tools and Tech-
niques; 11th International Conference; TOOLS 2000, Schaumburg, IL, (edited by
B. Haverkort, H. Bohnenkamp, and C. Smith). Lecture Notes in Computer Science
1786. Springer Verlag, 2000.
27. B. Tuffin and K. S. Trivedi. Importance sampling for the simulation of stochastic
Petri nets and fluid stochastic Petri nets. Proceedings of High Performance Computing,
Seattle, WA, April 2001.
28. X. Zang, D. Wang, H. Sun, and K. S. Trivedi. A BDD-based algorithm for analysis
of multistate components. IEEE Transactions on Computers, vol. 52, no. 12,
pp. 1608–1618, December 2003.
29. Introduction to VAXcluster Application Design. Digital Equipment Corporation, 1984.
REFERENCES 325
