application of reciprocal theorem with
TRANSCRIPT
APPLICATION OF RECIPROCAL THEOREM WITH COMPLETE FUNCTIONS IN STATIC AND VIBRATION PROBLEMS
OF THIN ELASTIC PLATES
Somsak Leungvichcharoen Department of Civil Engineering, Naresuan University, Phitsanulok, Thailand
Suthum Suriyamongkol
Department of Civil Engineering, Chulalongkorn University, Bangkok, Thailand
Anil C. Wijeyewickrema Department of Civil Engineering, Tokyo Institute of Technology, Tokyo, Japan
ABSTRACT
A solution method based on Maxwell-Betti’s reciprocal theorem with complete functions is proposed for static and dynamic analyses of thin elastic plates. The formulation leads to boundary integrals with no singularities which is advantageous.
In the case of dynamic analysis, the concept of sequential cause and effect is introduced to avoid domain integrals which would normally occur due to inertial and damping effects.
Numerical results in terms of deflections and stresses for static bending, and natural frequencies, mode shapes and resonant frequencies for damped and undamped vibrations are given and compared with available references, and found to closely agree. The proposed solution is also uniformly convergent. Keywords: elastic plates, static, vibration, reciprocal work theorem, complete functions, boundary element method, sequential cause and effect.
INTRODUCTION
Boundary Integral or Boundary Element methods (BEM), the formulation of which can be deduced through Maxwell-Betti’s reciprocal theorem have been used by many investigators for both static and dynamic analyses of thin elastic plates [1-4]. In the latter case, not only boundary but also domain integrals are involved due to the presence of inertial force [4]. Domain integrals of unknown deflections and forces greatly increase the amount of data preparation and computation and leads many researchers to study for efficient methods to transform them into equivalent boundary integrals. One of such methods called the Multiple Reciprocity Method has
recently been introduced by Neves and Brebbia [5], and later, employed by Sladek, Sladek and Tanaka [6] to treat the problem of harmonic vibration of thin elastic plates. In the application of BEM to both static and dynamic plate problems, the deflection function due to a point load is widely used as a fundamental or trial solution. However, this type of functions causes difficult evaluation of boundary integrals due to singularities which occur in some stress terms. Zielinski and Zienkiewicz [7] pointed to this disadvantage and suggested use of a series of all possible solutions in a given domain. Such a series being considered as complete was taken as a solution system with each term in it acting as a trial system in BEM formulation. They illustrated the suggested method by solving a Poisson equation governing the problem of torsion of a prismatic bar. Later, Leungvichcharoen and Suriyamongkol used this same conception to develop an effective BEM formulation for static bending of thin elastic plates of arbitrary planforms and support conditions based on Maxwell-Betti’s reciprocal theorem [8]. In this paper the concept of complete functions together with, Maxwell-Betti’s reciprocal theorem as applied to static problems of thin elastic plates is first illustrated, and then extended to vibration problems with and without viscous damping. The latter problems are time varying and involve inertial forces which would normally lead to domain integrals of unknown functions as mentioned above, but this is to be avoided by the following proposed technique : Displacement at any time during vibration is treated as superposition of a sequence of displacements, each one is caused by the inertial and damping effects of the one just before it. Taking static deflection as the first term of the sequence, successive terms can be obtained as particular integrals of the plate equation regarding the inertial and damping forces resulted from prior terms as external static loads. Explicit recurrence formulae for the sequence are derived in this study. Numerical results in terms of deflections and stress resultants of a static rectangular plate are given for illustration and comparison with exact solution. For vibration problems, mode shapes and natural frequencies are computed for several regular polygonal plates, and the results compared with those of other investigators.
THEORY AND METHOD OF ANALYSIS Static Problem The governing equation of a homogeneous, isotropic, thin elastic plate is [9]
( ) ( )xx qwD =∇∇ 22 (1) where ( )xw denotes deflection at point of co-ordinates x , ( )xq the external load per unit area, 2∇ the harmonic differential operator, D flexural rigidity, which related to Young’s modulus E , Poisson’s ratio ν and thickness h as )]1(12[ 23 ν−= EhD .
A general solution of equation (1) is composed of a particular integral, Pw , and a complementary solution, Cw , in the form
CP www += (2)

If Cw contains all possible solution admissible to a domain of interest it is said to be complete. For instance, for an interior domain, the following set, C, of complementary solutions is supposed to be complete [9] :
( ) ( ) ( ) ( ) ,..3,2,1|sin,sin;cos,cos;,1 222 =++ mmrmrmrmrr mmmm θθθθC (3)
where r and θ are polar co-ordinates. A solution may, therefore, be taken as
∑=
+=N
jjj
P wAww,...3,2,1
(4) in which sw j ' are members from the set C given in (3) above and sAj ' arbitrary constant coefficients. N is a number large enough for required accuracy. Slopes and stress resultants can be obtained from (4) by differentiation. Denoting the domain and boundary of a plate problem by Ω and Γ , a Maxwell-Betti’s reciprocal work equation for the system of forces and displacements corresponding to the solution w as written in (4), called a solution system, and those corresponding to each term, iw , in the series, called a trial system, can be written as
( ) ( ) ( )∑∫∫∫ +Γ−+ΩΓΩ
kkikninini wRdwMwVdwq xx
( ) ( ) ( )∑∫ +Γ−=Γ
kkikninni RwdMwVw xx (5)
where, corresponding to the solution system given in (4), w , nw , nM and nV denote deflection, normal slope, bending moment and Kirchoff’s shear on the boundary, while ( )kR x denotes the corner force of a corner at kx , considered positive in the same direction as w . The subscript i is designated for those corresponding to an i-th trial system. N such equations as (5), which, given (4), are linear algebraic equations, can be written as :
( )
( ) ( ) ( ) ( )[ ]
( )
( ) ( ) ( ) ( )[ ] NiRwwR
dMwVwwMwVdwq
RwwR
dMwVwwMwVA
kkik
Pkik
P
niP
nniP
niPni
Pni
kkikjkikj
N
jninjnijninjinjj
,...,3,2,1,
,..3,2,1
=−−
Γ−++−+Ω−
=
−+
Γ+−−
∑
∫∫∫
∑
∑ ∫
ΓΩ
=Γ
xxxx
xxxx (6)

from which sAj ' can be determined provided that the boundary is properly prescribed. Vibration Problem The equation of motion of the plate displacement, ( ),tW x , at time t during vibration can be written as :
pt
WctWhWD =
∂∂
+∂
∂+∇∇ 2
222 γ (7)
Whereγ , c and ( ),tp x refer to mass density, viscous damping coefficients and external time-varying load respectively.
If ( ),tp x is harmonic with a constant angular frequency, ϖ , such that
( ) ( ) tieq,tp ϖxx = (8) the steady-state response displacement is
( ) ( ) tiew,tW ϖxx = (9) where, unlike the previous meaning in static problem, this time, ( )xq and ( )xw are amplitude functions of the time-varying load and displacement respectively.
Substitution of equations (8) and (9) into (7) yields the governing equation in space domain
( ) ( ) ( )xxx qwwD =−∇∇ κ22 (10) in which
cih ϖγϖκ −= 2 (11) Proposed concept of sequential cause and effect General solutions of (10) would involve such higher transcendental functions as Bessel and
Kelvin functions which should not be convenient for further formulation. In this study, we propose to view the amplitude function, ( )xw , as a superposition of a sequence of amplitude functions, each being caused by the inertial and damping effects of the one just before it, and itself, in turn, is the cause of the next function. Taking the static deflection, ( ) ( )x0w , due to ( )xq as the first of a sequence of M terms, one can write ( )xw according to this concept as
( ) ( ) ( ) ( ) ( )∑=
+=M
s
swww,...3,2,1
0 xxx (12)

In which, each successive term of ( )sw can be obtained as a particular integral of the plate equation regarding the inertial and damping force effects of ( )1−sw , i.e., ( )1−swκ , as an external static load. Thus,
( ) ( ) ( )xx qwD =∇∇ 022 (13)
and
( ) ( ) ( ) ( ) MswwD ss ,...,3,2,1;122 ==∇∇ − xx κ (14) As similar to (1), a general solution of (13) for an interior domain problem is composed of a particular integral, Pw , and a linear combination of sw j ' which are member functions in the set C given in (3) :
( ) ∑=
+=N
jjj
P wBww,...3,2,1
0 (15)
where sB j ' are arbitrary constant coefficients.
Given ( )0w as above ( ) ( ) ( ) ( )Mwwww ,...,,, 321 can be determined successively by repeated integration of (14). This leads to recurrence formulae which related ( )sw to ( )0w in the form
( ) ( ) ( ) ,...3,2,1;,..3,2,1
=+= ∑=
sfwBfwwN
j
sjjj
sP
Ps (16)
and, consequently, the amplitude function ( )xw in (12) may be written as
∑=
+=N
jjj
P wBww,..3,2,1
** (17)
where ( ) ( )
+=
+= ∑∑
==
M
s
sjjj
M
s
sP
PP fwwfww,..3,2,1
*
,..3,2,1
* 1;1 (18)
The recurrence function ( )s
jf can be derived for each form of jw as listed in (3) as follows :

( )
=++++
=+
=+
=
=
+
θ
θκ
θ
θκ
κ
κ
j
jrwforsjsDrj
j
jrwforsjsDrj
rwforsDr
wforsDr
f
jj
s
jj
s
js
js
sj
sin
cos,])!12()!12[()16/()!1(
sin
cos,])!2(![)32/(!
,])!12[()16/(
1,])!2[()16/(
24
4
224
24
(19)
Furthermore, given ( )xq , Pw as well as its recurrence function, ( )s
Pf , can also be derived without difficulty. For example, for the case of uniform load ( ) 0qq =x ,
( )
( ) 24
40
])!12)(1[()16/(and
64
++=
=
ssrf
Drqw
ssP
P
κ (20)
Up to this step explicit expressions of slopes and stress resultants can be obtained by
differentiating the amplitude function in (17) and (18) in view of the recurrence functions given in (19) and (20).
It should also be noted that, under this concept it is assumed that : during steady-state
vibration, the total effects of external load ( ),tp x and spontaneous inertial and damping forces are represented by an equivalent load, ( ),tpe x , below
( ) ( ) ( ) ( ) tiM
s
se ewqtp ϖκ
+= ∑
= ,...3,2,1, xxx
which upon substitution of ( )sw from (16) becomes
( ) ( ) ( ) ( ) tiN
j
M
s
sjjj
M
s
sP
Pe efwBfwqtp ϖκκ
++= ∑ ∑∑
= == ,...3,2,1 ,...3,2,1,...3,2,1, xx ( 2 1 )
Proposed BEM formulation Given external harmonic load in the form of (8), a solution of displacement ( ),tW x has been derived by the proposed concept of sequential cause and effect in the form of (9), (17) and (18). Under this concept the total effects of external load and inertial and damping forces are represented by an equivalent load, ( ),tpe x , given in (21). This solution system of forces and displacements are certainly in equilibrium and compatibility.
Now, since any wj-function is a complementary solution of (1), its corresponding system of forces and displacements must also in equilibrium and compatibility. Therefore it should be able to be taken as a trial system versus the above mentioned solution system based on Maxwell-Betti’s theorem, the reciprocal work equation for which is :
( )
( ) ( ) ( ) ( )[ ] ( )
( )
( ) ( ) ( ) ( )[ ] NiRwwR
dMwVwwMwVdwq
dfwRwwR
dMwVwwMwVB
kkik
Pkik
P
niP
nniP
niPni
Pni
M
s
sjj
kkikjkikj
N
jninjnijninjinjj
,...,3,2,1,**
****
,...3,2,1
**
,...3,2,1
****
=−−
Γ−++−+Ω−
=
Ω+−+
Γ+−−
∑
∫∫∫
∑ ∫∫∑
∑ ∫
ΓΩ
=Ω
=Γ
xxxx
xxxx κ (22)
In which, ( ) ( ) ( ) ( )k
PPn
Pn
Pn
Pk
Pkjnjnjnjjkj RVMwwwRVMwww xxxx ************ and,,,,;,,,,, are
boundary values of deflections, normal slopes, bending moments, Kirchhoff’s shears and corner forces corresponding to ** P
j wandw respectively. For a given plate with the boundary being properly prescribed, the set of N linear algebraic equations, (22), can be solved for sB j ' leading to a solution of steady-state response to a given harmonic load. Furthermore, for undamped vibration, its eigenvalues and eigenvectors give the natural frequencies and mode shapes of the plate. For damped vibration, however, one can vary the loading frequency, ω , and plot a resonant curve, from which resonant frequencies of the plate may be detected.
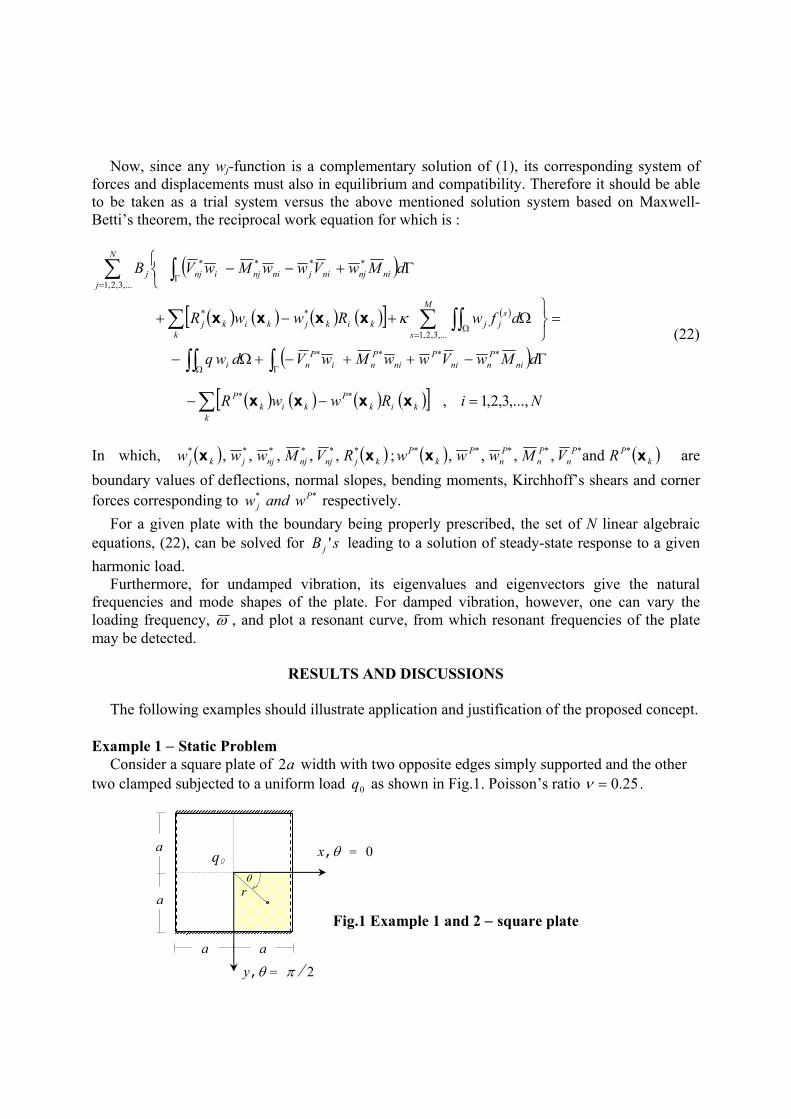
RESULTS AND DISCUSSIONS The following examples should illustrate application and justification of the proposed concept. Example 1 − Static Problem Consider a square plate of a2 width with two opposite edges simply supported and the other two clamped subjected to a uniform load 0q as shown in Fig.1. Poisson’s ratio 25.0=ν .
x,θ = 0
y,θ = π / 2
q0
Fig.1 Example 1 and 2 − square plate a
a
a a
rθ

For this static problem a particular integral may be taken as
DrqwP 6440= (23)
and, due to its double symmetry, the complete set C given in (3) should be reduced to
( ) ( ) ,...6,4,2|cos,cos,,1 22 =+ mmrmrr mm θθ Therefore, a solution in the form proposed in (4) is
( ) ( ) ( )
++= ∑
=
+N
j
jj
jj jdc
Daq
w,...4,2,0
244
0 cos64
, θρρρθρ (24)
in which ar=ρ and jc and jd are unknown coefficients.
The boundary conditions can be written as
( ) ( )( ) ( ) 24,0,cosec,cosec
40,0,sec,sec
πθπθθθθ
πθθθθθ
<<==
<<==
y
x
ww
Mw (25)
where xM and yw refer to bending moment and slope normal to the edge respectively.
Using the above solution and prescribed boundary conditions, 22 +N linear algebraic equations in the form of (6) can be formulated and solved for the 22 +N unknown coefficients
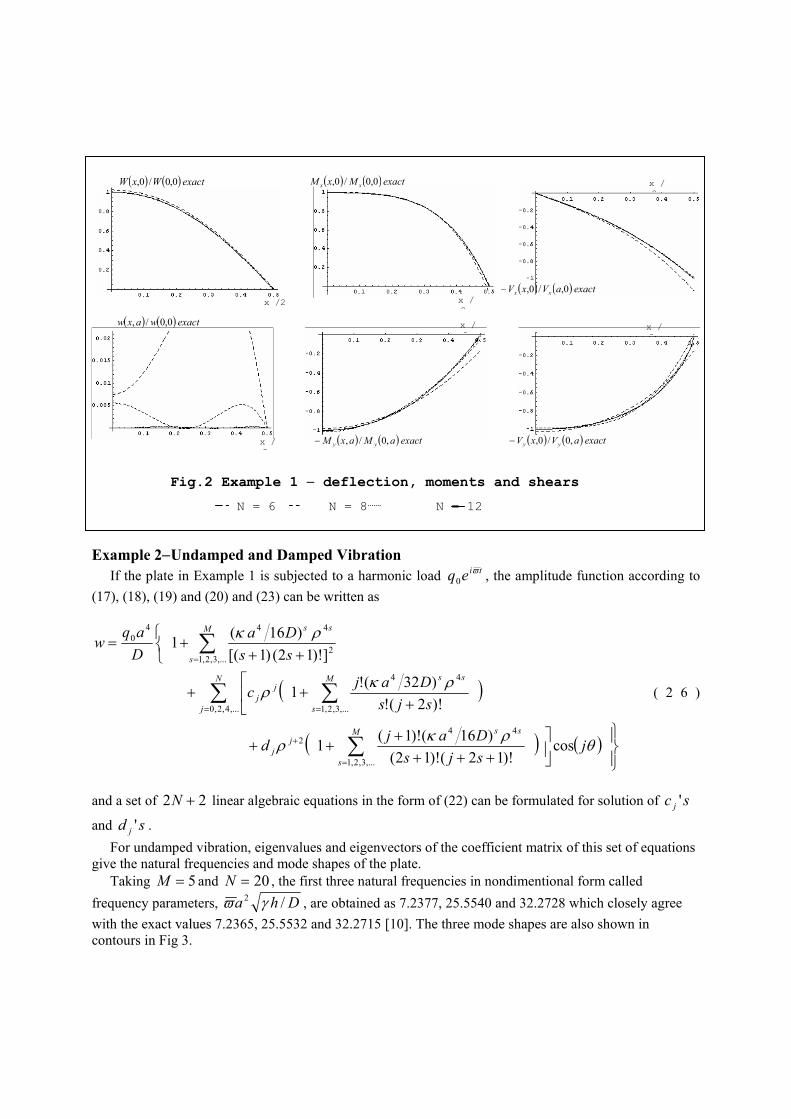
sc j ' and sd j ' . Their numerical values for 8,6=N and 12 are shown in Table 1 below, while the deflection, bending moments and Kirchoff’s shears are plotted against the nondimensional arguments of ax 2/ , and compared with exact solution [9].
As may be seen by the stable values of the first coefficients and vanishing of the last as the series is extended, as well as the close agreement with exact solution of the results, the proposed solution should be considered as uniformly convergent.
Table 1 Example 1 − coefficients cj and dj
N = 6 N = 8 N = 12 cj dj cj dj cj dj
0 0.0313484148 -0.0442838482 0.0307506716 -0.0443208937 0.0306758033 -0.0443332870
2 0.0123636723 -0.0114129504 0.0126858505 -0.0118336491 0.0126511004 -0.0117884866
4 -0.0061257862 0.0037229829 -0.0055371816 0.0034665231 -0.0055038972 0.0034339944
6 -0.0010660693 0.0001729009 -0.0009411453 0.0000363629 -0.0009477806 0.0000724551
8 - - 0.0002056061 -0.0000723476 0.0001703742 -0.0000647171
10 - - - - 0.0000105886 2.35665259 x 10-6
12 - - - - -8.32352583 x 10-6 1.87974269 x 10-6
j
Example 2−Undamped and Damped Vibration If the plate in Example 1 is subjected to a harmonic load tieq ϖ
0 , the amplitude function according to (17), (18), (19) and (20) and (23) can be written as
( )
( ) ( )
+++
+++
+
++
++ +=
∑
∑ ∑
∑
=
+
= =
=
θρκρ
ρκρ
ρκ
jsjsDajd
sjsDajc
ssDa
Daq
w
M
s
ssj
j
N
j
M
s
ssj
j
M
s
ss
cos)!12()!12(
)16()!1(1
)!2(!)32(!1
])!12()1[()16(1
,...3,2,1
442
,...4,2,0 ,...3,2,1
44
,...3,2,12
4440
( 2 6 )
and a set of 22 +N linear algebraic equations in the form of (22) can be formulated for solution of sc j '
and sd j ' . For undamped vibration, eigenvalues and eigenvectors of the coefficient matrix of this set of equations
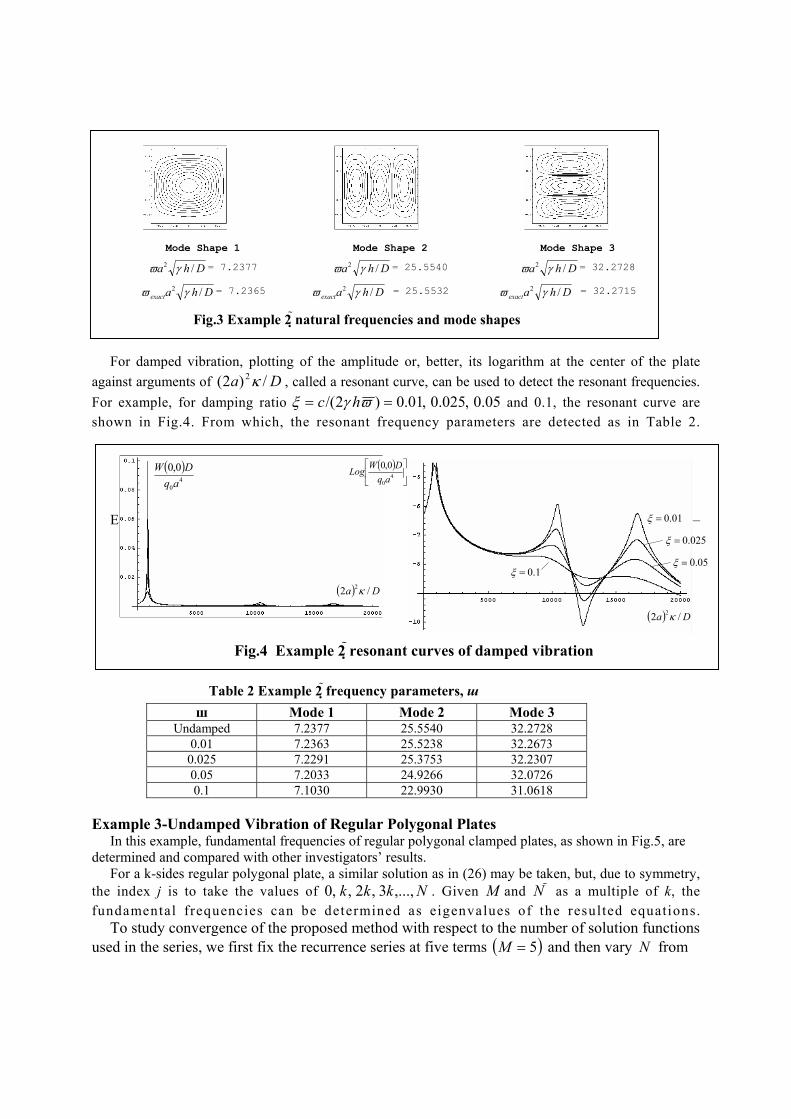
give the natural frequencies and mode shapes of the plate. Taking 5=M and 20=N , the first three natural frequencies in nondimentional form called
frequency parameters, Dha /2 γϖ , are obtained as 7.2377, 25.5540 and 32.2728 which closely agree with the exact values 7.2365, 25.5532 and 32.2715 [10]. The three mode shapes are also shown in contours in Fig 3.
( ) ( ) exactWxW 0,0/0, ( ) ( ) exactMxM xx 0,0/0,
( ) ( ) exactaVxV xx 0,/0,−
( ) ( ) exactaVxV yy ,0/0,−( ) ( ) exactaMaxM yy ,0/,−
( ) ( ) exactwaxw 0,0/,
N = 6 N = 8 N = 12 Fig.2 Example 1 − deflection, moments and shears
x /2 x / 2
x / 2
x / 2
x / 2
x / 2
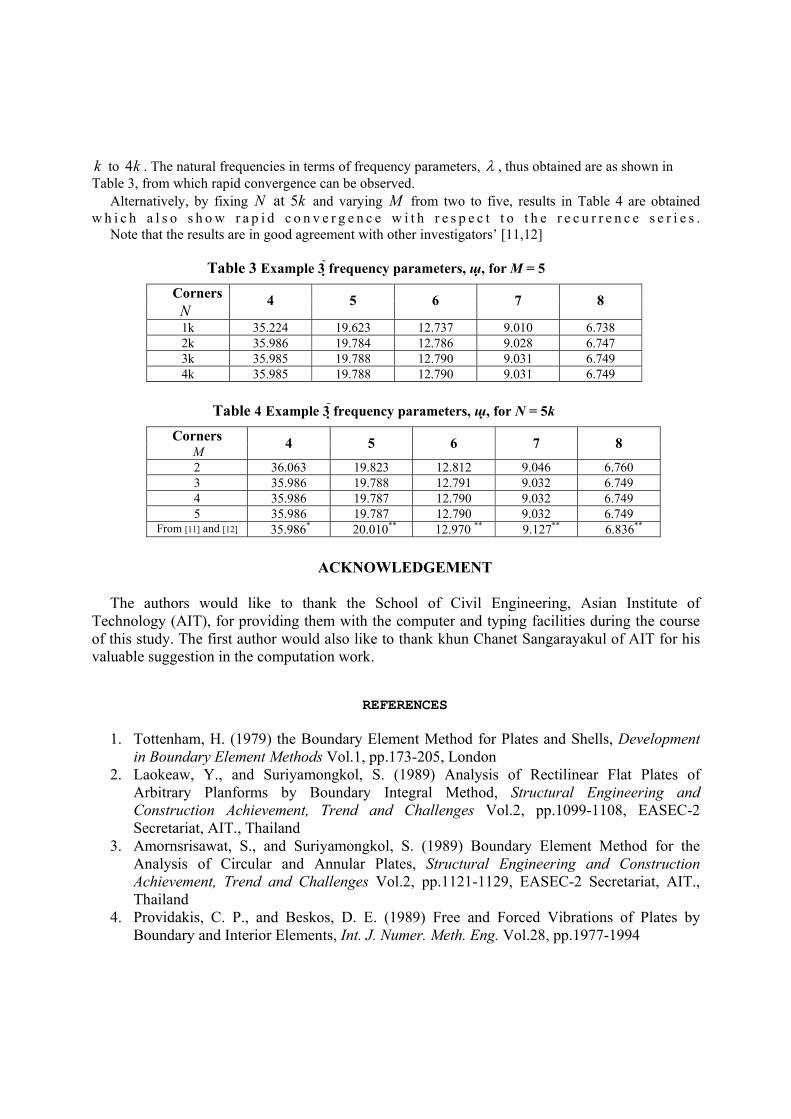
For damped vibration, plotting of the amplitude or, better, its logarithm at the center of the plate against arguments of Da /)2( 2κ , called a resonant curve, can be used to detect the resonant frequencies. For example, for damping ratio 05.0,025.0,01.0)2/( == ϖγξ hc and 0.1, the resonant curve are shown in Fig.4. From which, the resonant frequency parameters are detected as in Table 2.
E x a m p l e 3 –
Table 2 Example 2 frequency parameters, ш
ш Mode 1 Mode 2 Mode 3 Undamped 7.2377 25.5540 32.2728
0.01 7.2363 25.5238 32.2673 0.025 7.2291 25.3753 32.2307 0.05 7.2033 24.9266 32.0726 0.1 7.1030 22.9930 31.0618
Example 3-Undamped Vibration of Regular Polygonal Plates In this example, fundamental frequencies of regular polygonal clamped plates, as shown in Fig.5, are determined and compared with other investigators’ results.
For a k-sides regular polygonal plate, a similar solution as in (26) may be taken, but, due to symmetry, the index j is to take the values of Nkkk ,...,3,2,,0 . Given M and N as a multiple of k, the fundamental frequencies can be determined as eigenvalues of the resulted equations. To study convergence of the proposed method with respect to the number of solution functions used in the series, we first fix the recurrence series at five terms ( )5=M and then vary N from
Mode Shape 1
Dha /2 γϖ = 7.2377
Dhaexact /2 γϖ = 7.2365
Mode Shape 2
Dha /2 γϖ = 25.5540
Dhaexact /2 γϖ = 25.5532
Mode Shape 3
Dha /2 γϖ = 32.2728
Dhaexact /2 γϖ = 32.2715
Fig.3 Example 2 natural frequencies and mode shapes
( )4
0
0,0aq
DW
( )
4
0
0,0aq
DWLog
( ) Da /2 2κ
( ) Da /2 2κ
01.0=ξ
025.0=ξ
05.0=ξ1.0=ξ
Fig.4 Example 2 resonant curves of damped vibration
k to k4 . The natural frequencies in terms of frequency parameters, λ , thus obtained are as shown in Table 3, from which rapid convergence can be observed. Alternatively, by fixing N at k5 and varying M from two to five, results in Table 4 are obtained w h i c h a l s o s h o w r a p i d c o n v e r g e n c e w i t h r e s p e c t t o t h e r e c u r r e n c e s e r i e s . Note that the results are in good agreement with other investigators’ [11,12]
Table 3 Example 3 frequency parameters, ш, for M = 5
Corners N
4
5
6
7
8
1k 35.224 19.623 12.737 9.010 6.738 2k 35.986 19.784 12.786 9.028 6.747 3k 35.985 19.788 12.790 9.031 6.749 4k 35.985 19.788 12.790 9.031 6.749
Table 4 Example 3 frequency parameters, ш, for N = 5k
Corners M
4
5
6
7
8
2 36.063 19.823 12.812 9.046 6.760 3 35.986 19.788 12.791 9.032 6.749 4 35.986 19.787 12.790 9.032 6.749 5 35.986 19.787 12.790 9.032 6.749
From [11] and [12] 35.986* 20.010** 12.970 ** 9.127** 6.836**
ACKNOWLEDGEMENT
The authors would like to thank the School of Civil Engineering, Asian Institute of
Technology (AIT), for providing them with the computer and typing facilities during the course of this study. The first author would also like to thank khun Chanet Sangarayakul of AIT for his valuable suggestion in the computation work.
REFERENCES 1. Tottenham, H. (1979) the Boundary Element Method for Plates and Shells, Development
in Boundary Element Methods Vol.1, pp.173-205, London 2. Laokeaw, Y., and Suriyamongkol, S. (1989) Analysis of Rectilinear Flat Plates of
Arbitrary Planforms by Boundary Integral Method, Structural Engineering and Construction Achievement, Trend and Challenges Vol.2, pp.1099-1108, EASEC-2 Secretariat, AIT., Thailand
3. Amornsrisawat, S., and Suriyamongkol, S. (1989) Boundary Element Method for the Analysis of Circular and Annular Plates, Structural Engineering and Construction Achievement, Trend and Challenges Vol.2, pp.1121-1129, EASEC-2 Secretariat, AIT., Thailand
4. Providakis, C. P., and Beskos, D. E. (1989) Free and Forced Vibrations of Plates by Boundary and Interior Elements, Int. J. Numer. Meth. Eng. Vol.28, pp.1977-1994
5. Neves, A.C., and Brebbia, C. A. (1992) The Multiple Reciprocity Method Applied to Thermal Stress Problems, Int. J. Numer. Meth. Eng. Vol.35, pp.443-455
6. Sladek, V., Sladek, J., and Tanaka, M. (1993) Multiple Reciprocity Method for Harmonic Vibration of Thin Elastic Plates, Appl. Math. Modelling, Vol.17, pp.438-476
7. Zielinski, A. P., and Zienkiewicz, O. C. (1985) Generalize Finite Element Analysis with T-Complete Boundary Solution Functions, Int. J. Numer. Meth. Eng. Vol.21, pp.509-528
8. Leungvichcharoen, S. (1997), Application of Maxwell-Betti’s Theorem and Complete Function Theorem in Thin Plate Structures, Master Thesis, Chulalongkorn University, Thailand
9. Timoshenko, S.P., and Woinowsky, K.S. (1959) Theory of Plate and Shells, McGraw-Hill, New York
10. Leissa, A.W. (1969), Vibration of Plates, NASA SP-160 11. Young, D. (1950), Vibration of Rectangular Plates by the Ritz Method, J. Appl. Mech.,
Vol.17, pp.448-453 12. Irie, T., Yamada, G. and Narita, Y. (1978) Free Vibration of Clamped Polygonal Plates,
Bull. JSME, Vol.21, pp.1696-1702