a low-power multilevel-output classifier circuit
TRANSCRIPT
Manuscript ID TNN-2011-P-2933
1
Abstract— Implementation and new applications of a tunable
Complementary Metal–Oxide–Semiconductor Integrated Circuit
(CMOS-IC) of a recently proposed classifier Core-Cell (CC) are
presented and tested with two different datasets. With two
algorithms, one based on Fisher’s linear discriminant analysis
and the other on perceptron learning, used to obtain CC’s
tunable parameters, Haberman and Iris datasets are classified.
The parameters so obtained are used for hard-classification of
datasets with a neural network structured circuit. Classification
performance as well as coefficient calculation times for both
algorithms are given. The CC has 6 ns response time and 1.8 mW
power consumption. The fabrication parameters used for the IC
are taken from CMOS AMS 0.35 µm technology.
Index Terms—CMOS, Classifier, Fisher, Iris, Haberman
I. INTRODUCTION
LASSIFICATION is an important subject matter in many
applications ranging from pattern recognition, neural
networks to artificial intelligence, from statistics to template
matching [1], [2]. In general data classification can be realized
either by software or by hardware systems. Many algorithms
have been developed for classification [1]; however for faster
online operations on hard data it is desirable to realize these
classifiers in hardware which can be achieved with many
different approaches either in analog or digital domains.
Analog implementation of classification has many
advantages over digital ones. For one, complexity of analog
circuits is lower as compared to digital circuits; for another,
they can be built in voltage or current-mode (input and output
signals are current). In voltage-mode implementations the
supply voltage level has an important impact on the dynamic
range of the circuit. Current-mode approach provides larger
dynamic range for processing the variables. It is well known
that shrinking bias voltages makes it difficult to process data
in voltage-mode. A simple summing circuit, in voltage-mode,
needs additional active blocks (e.g. operational amplifiers and
additional circuitry); current-mode processing on the other
hand is preferred as currents can be added by connecting
output terminals of the blocks without requiring the use of
extra active blocks. For a handicap, the current-mode circuits
used to suffer from less accuracy in comparison to voltage-
Manuscript received January 25, 2011; revised June 15, 2011,October 20,
2011 and 01 February, 2012. This work is part of project 106E139 supported
by the Scientific & Technological Research Council of Turkey (TÜBİTAK). The authors are with the Department of Electronics and Communications
Engineering, Dogus University, Acibadem, Kadikoy 34722, Istanbul, Turkey.
(e-mail: [email protected], [email protected], [email protected] )
mode ones; but, in newer technologies (180 nm and below)
where low supply voltages are used, the accuracy in voltage-
mode circuits is also critical whereas current signals can
maintain high ratio accuracy [3]. Some classifier circuits,
using advantages of the current-mode approach, are listed in
the next paragraph.
For template matching applications, current-mode circuits
are proposed in [4] based on Euclidean distance calculator and
in [5] based on threshold circuits. Another current-mode
circuit which covers both Euclidean distance calculation and
Gaussian neighborhood tapering is given in [6]. A current-
mode sorting circuit for pattern recognition is designed to
build transformation between features and classes in [7] and
[8]. For pattern recognition applications a current-mode, fuzzy
IC is presented in [9]. Different classification solutions
regarding the implementation of neural networks on
programmable digital circuits and devices can be found in
[10], [11] but these circuits are relatively costly and high
power dissipating. A compact analog programmable multi-
dimensional radial basis function based classifier is proposed
in [12] and CMOS implementation of a Neural Network (NN)
classifier with several output levels and a different architecture
is given in [13]. CMOS realization of a conscience mechanism
used to improve the effectiveness of learning in winner-take-
all artificial neural networks, which also eliminates the dead
neurons, is presented in [14]. Except the one in [13], all these
circuits suffer from the shortcoming of not being tunable.
In this paper, the new DU-TCC 1209 IC containing 3 CCs,
9 Second-Generation Current Conveyors (CCII) and 3 current
buffers is being introduced. The newer CC architecture
published in [5], which improves the response time and the
Relative Tracking Error (RTE) as compared to the CC given
in [13], is being exploited in the IC design/layout/fabrication.
Connected properly, these CCs can be exploited to realize
n-D classifiers, which can only classify data, defined over
mesh-grid (rectangular partitioning) domains. To overcome
this deficiency, Linearly Weighting Circuits (LWC) that take
linear combinations of data and input these combinations to
CC are introduced as preprocessing units.
With two algorithms, modified/adapted versions of Fisher’s
Linear Discriminant Analysis (LDA) and Perceptron Learning
Algorithm (PLA) the weighting coefficients are calculated and
soft as well hard-tested on Iris and Haberman datasets.
Iris dataset consists of 50 samples from each of three
species of the Iris flowers, which are: virginica, versicolor and
setosa (3-class data). The flowers have 4 features which are
the lengths and widths of the sepal and petal in centimeters (4-
A Neural CMOS Integrated Circuit and
its Application to Data Classification
İzzet Cem Göknar, Fellow IEEE, Merih Yıldız, Member IEEE, Shahram Minaei, Senior Member
IEEE, and Engin Deniz, Member IEEE
C
Manuscript ID TNN-2011-P-2933
2
D data). This dataset is classified with LDA to distinguish the
flowers from each other [15]; the Iris dataset is not linearly
separable and is frequently used to test many other
classification techniques. Haberman dataset contains cases
from a study that was conducted between 1958 and 1970 at the
University of Chicago's Billings Hospital on the survival of
patients who have undergone surgery for breast cancer. It
consists of 306 samples from two classes, the patients who
survived 5 years or longer (255 samples) and the patients who
died within 5 years (81 samples). The dataset is 3-D with age
of the patient at the time of operation, patient’s year of
operation and number of positive axillary nodes detected.
The paper is organized as follows: in Section II, block
diagram, the transfer characteristic and the schematics of the
current-mode CC are given. In Section III, LWC needed for
datasets separated by hyperplanes with arbitrary slopes is
introduced. Derivation of parameter values for classifying
datasets using the modified Fisher’s LDA based algorithm is
given in section IV. The derivation of the same parameters
with PLA is given in section V. In Section VI, these weight
parameters are applied to the Iris and Haberman dataset
classifier circuits, which are constructed with LWCs and CCs;
also DU-TCC 1209 classification test results are compared
with the simulation results. Finally, Section VII concludes the
paper.
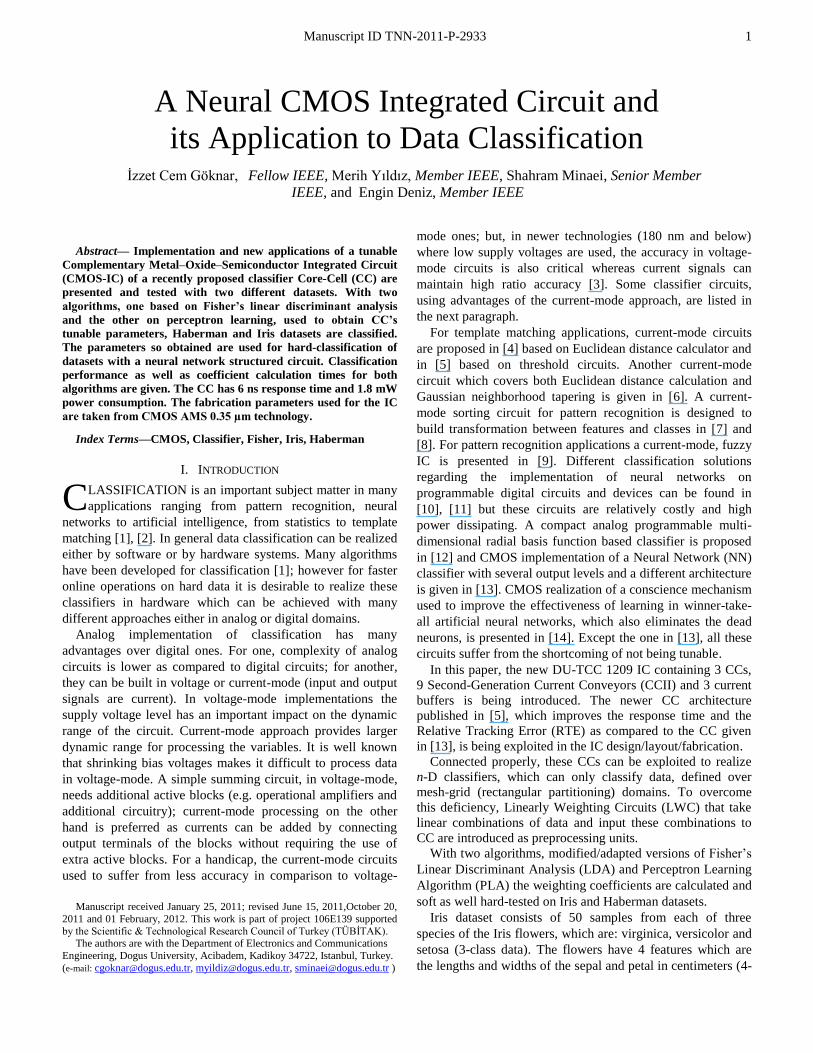
II. CMOS CORE CELL (CC)
The block diagram of the CC and its transfer characteristics
are shown in Figs. 1(a) and (b), respectively. The horizontal
position, the width and the height of the transfer characteristic
can be adjusted independently by means of external currents I1,
I2 and IH. The proposed CC schematic is shown in Fig. 2
where the transistors M1-M5 and M8-M12 constitute the two
threshold circuits respectively. The basic current mirror
constructed with transistors M6 and M7 performs the desired
operation of subtraction. The transistors M13, M14, M15 are
used to provide currents equal to IH (adjusting the output level)
for the threshold circuits. Similarly, the same approach is used
with transistors M16, M17 and M18 to apply the input current Iin
to both of the threshold circuits.
The current Iin is the 1-D data for each CC and Iout is the
output of the classifier. It has been shown in [5] that by
properly grouping CCs and adding the outputs in each group
Multi-Input-Multi-Output (MIMO) classifiers can be obtained.
A detailed Monte Carlo analysis of the CC for VTH and β
parameters of the MOS transistors are reported in [5]; they
show that parameter mismatch has little effect on the CC
characteristics.
III. CLASSIFICATION OF DATA PARTITIONED
WITH ARBITRARY HYPERPLANES
The block diagram of the CC presented in Section II, and
MIMO classifiers realized with them, partitions data domains
into rectangular mesh-grids whereas there is strong need to
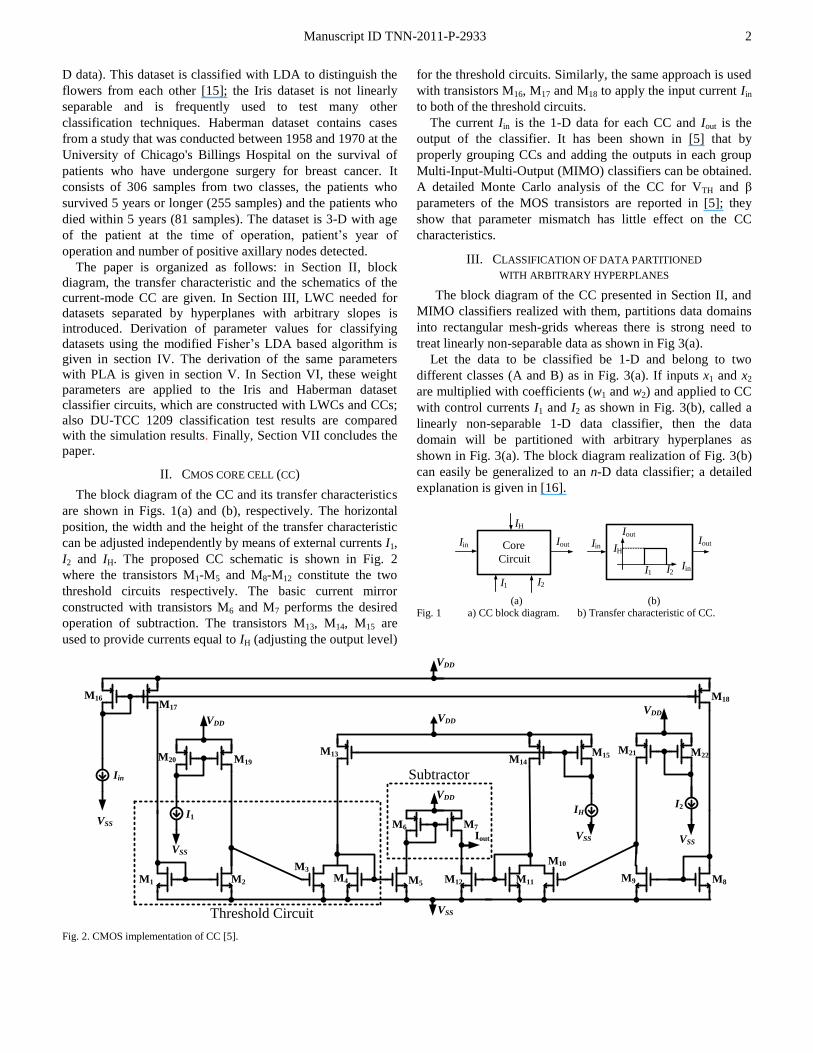
treat linearly non-separable data as shown in Fig 3(a).
Let the data to be classified be 1-D and belong to two
different classes (A and B) as in Fig. 3(a). If inputs x1 and x2
are multiplied with coefficients (w1 and w2) and applied to CC
with control currents I1 and I2 as shown in Fig. 3(b), called a
linearly non-separable 1-D data classifier, then the data
domain will be partitioned with arbitrary hyperplanes as
shown in Fig. 3(a). The block diagram realization of Fig. 3(b)
can easily be generalized to an n-D data classifier; a detailed
explanation is given in [16].
IH
I1 I2
IoutIin Core
CircuitIin
Iout
I1 I2
IH
IoutIin
(a) (b) Fig. 1 a) CC block diagram. b) Transfer characteristic of CC.
I1
Iin
Iout
IHI2
VDDVDD
VDD
VDD
VDD
VSS
VSS
VSS
M1 M2
M3
M4 M5
M6 M7
M8M9
M10
M11M12
M13M14
M15
M16M17
M18
Threshold Circuit
VSS
M20 M19
M21 M22
VSS
Subtractor
Fig. 2. CMOS implementation of CC [5].
Manuscript ID TNN-2011-P-2933
3
x1
x2
1
1
w
I
1
2
w
I
2
1
w
I
2
2
w
I
A
A
B
x1w1+x2w2
IH
I1 I2
Iout
Iin
Core
Circuit
(a) (b)
Fig. 3. Linearly non-separable a) data domains b)1-D data classifier.
Fig. 4. Classification methodology of LDA dataset [16].
The classification method and the IC developed in the
sequel will be able to classify linearly non-separable (e.g. as
the one in Fig. 4(a)) data. The dashed lines, called Double
Threshold Hyperplanes (DTH), in Fig. 4 (b)-(d) correspond to:
axwxw 2211 , bxwxw 2211 (1)
and are found to provide best separation of data as shown in
Fig. 4(b) (data outside of these DTH being already classified).
Then classified data is deleted and for the rest, the DTH are
found again as shown in Fig. 4(c). The outcome of the
classification is shown in Fig. 4(d). So the classification of
data is achieved by finding the appropriate coefficients w1, w2
and corresponding CC currents. The output of the classifier
will be in conformity with Fig. 4(d). Algorithms for obtaining
these DTHs will be presented in Sections IV and V.
IV. CLASSIFICATION OF DATA WITH
FISHER’S LDA BASED ALGORITHM
Fisher’s LDA, a successful linear feature extraction method
which maximizes between-class separability and minimizes
within-class variability, is used to find the classifier circuits’
parameters; it will be presented here in 2-D and applied to 4-
D; exactly the same procedure is valid in n-D [17].
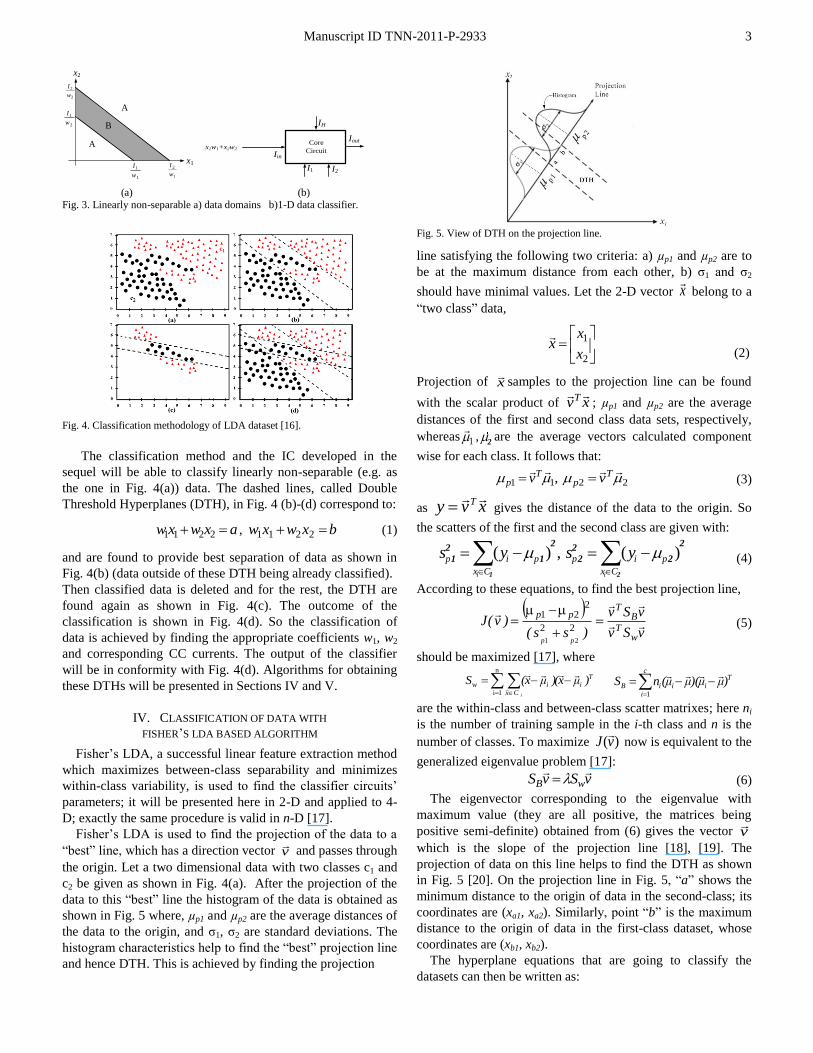
Fisher’s LDA is used to find the projection of the data to a
“best” line, which has a direction vector v
and passes through
the origin. Let a two dimensional data with two classes c1 and
c2 be given as shown in Fig. 4(a). After the projection of the
data to this “best” line the histogram of the data is obtained as
shown in Fig. 5 where, µp1 and µp2 are the average distances of
the data to the origin, and σ1, σ2 are standard deviations. The
histogram characteristics help to find the “best” projection line
and hence DTH. This is achieved by finding the projection
Fig. 5. View of DTH on the projection line.
line satisfying the following two criteria: a) µp1 and µp2 are to
be at the maximum distance from each other, b) σ1 and σ2
should have minimal values. Let the 2-D vector x
belong to a
“two class” data,
2
1
x
xx
(2)
Projection of x
samples to the projection line can be found
with the scalar product of xvT ; µp1 and µp2 are the average
distances of the first and second class data sets, respectively,
whereas 1
, 2are the average vectors calculated component
wise for each class. It follows that:
,11 T
p v 22 T
p v (3)
as xvy T
gives the distance of the data to the origin. So
the scatters of the first and the second class are given with:
( ) ,i
p i p
x C
s y
1
22
1 1 ( )i
p i p
x C
s y
2
22
2 2 (4)
According to these equations, to find the best projection line,
vSv
vSv
)ss()v(J
wT
BT
pp
pp
22
221
21
(5)
should be maximized [17], where
n
1iw
Ti
Cxi )μx()μx(S
i
c
i
TiiiB )μμ)(μμ(nS
1
are the within-class and between-class scatter matrixes; here ni
is the number of training sample in the i-th class and n is the
number of classes. To maximize )(vJ
now is equivalent to the
generalized eigenvalue problem [17]:
vSvS wB
(6)
The eigenvector corresponding to the eigenvalue with
maximum value (they are all positive, the matrices being
positive semi-definite) obtained from (6) gives the vector v
which is the slope of the projection line [18], [19]. The
projection of data on this line helps to find the DTH as shown
in Fig. 5 [20]. On the projection line in Fig. 5, “a” shows the
minimum distance to the origin of data in the second-class; its
coordinates are (xa1, xa2). Similarly, point “b” is the maximum
distance to the origin of data in the first-class dataset, whose
coordinates are (xb1, xb2).
The hyperplane equations that are going to classify the
datasets can then be written as:
Manuscript ID TNN-2011-P-2933
4
,x
xv
x
xv
a
aTT 02
1
2
1
02
1
2
1
b
bTT
x
xv
x
xv
(7)
The process is repeated for data between the hyperplanes, the
data outside being classified.
The components of the so chosen eigenvector determine the
weight coefficients (e.g. (14) in Section VI.B) to be used in the
LWC that will implement the separating hyperplanes.
In the n-D case, the only difference is in the dimension of
the involved matrices in (6), which is now n×n; again one has
to find the eigenvector, corresponding to the eigenvalue with
maximum value to determine DTH [18]-[20].
V. CLASSIFICATION OF DATA WITH THE
PERCEPTRON LEARNING ALGORITHM
The classical PLA widely used in neural networks is based
on a single threshold activation function [21] whereas the one
used here is double threshold function as shown in Fig. 1(b).
Regions separated by DTH are characterized by:
00
01
iTi
iTi
iavx
avxy
(8)
00
01
iTi
iTi
ibvx
bvxy
(9)
With the algorithm developed next for DTH, the vectors vi,
the DTH coefficients ai and bi in (8) and (9), relevant to the i-
th class, will be determined. Classification of the data will
then be achieved by separating the classes with appropriate
number of hyperplanes.
Perceptron Learning based Classification Algorithm
Selecting one of the data classes ci (i=1,2,..,m):
1. Check, if there is an appropriate DTH that separates all
data of class ci from all the others.
a. If there is, save these coefficients and delete this data
class from list; move to step 2.
b. If there is not, then move to step 3.
2. Continue with the remaining classes.
a. If the remaining class is m-th, then stop classification.
b. If not, move to the step 1.
3. Increase the number of DTH by 1 and check whether all
data from class ci can be separated from other classes.
a. If, yes then save the coefficients of DTHs and remove
this data class from list; move to step 2.
b. If, the class cannot be separated then move to step 3.
As the activation function is a hard limiter, the coefficients
can be calculated with the update rules of PLA [22] given
below.
Perceptron learning algorithm update rules:
(10)
(11)
(12)
In (10-12) yd and yo are the desired and the output obtained
at that step respectively; η is the learning coefficient which has
to be chosen between 0 and 1.While updating, when yd = yo the
weight coefficients do not change. Learning algorithm stops
when all weight coefficients stay constant [23].
When learning is finished using the training set, the DTHs
iTii bvxa
partition the data domain into regions each
containing a single class of data. Components of v
obtained
from the learning algorithm give the weight coefficients of
LWC, and ai and bi determine the CC’s control currents I1 and
I2. The remaining data set will be used to verify the correct
operation of the classifier so obtained. The CC current IH helps
to identify the class of the data. Thus, classification is
provided with appropriate number of LWC and CC blocks. In
the sequel both algorithms will be used to hard and soft-
classify Iris and Haberman datasets.
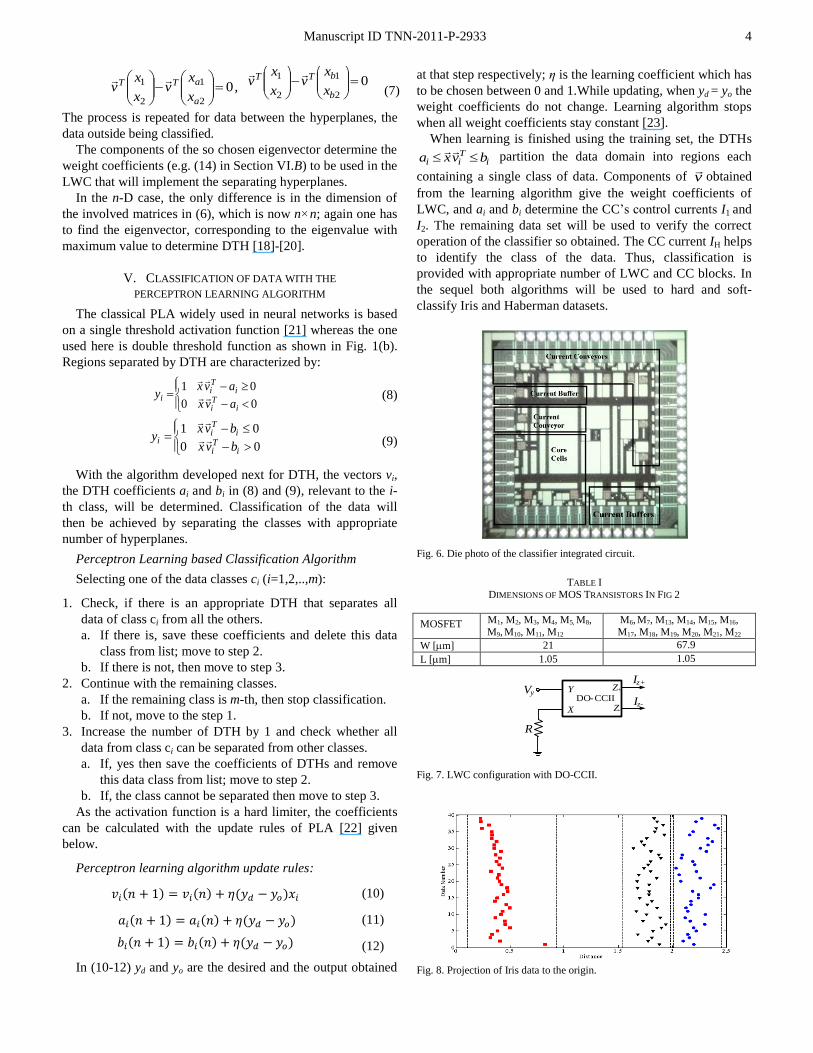
Fig. 6. Die photo of the classifier integrated circuit.
TABLE I DIMENSIONS OF MOS TRANSISTORS IN FIG 2
MOSFET M1, M2, M3, M4, M5, M8, M9, M10, M11, M12
M6, M7, M13, M14, M15, M16, M17, M18, M19, M20, M21, M22
W [m] 21 67.9
L [m] 1.05 1.05
Vy Y
X
Iz+
Iz-
R
DO- CCII
Z+
Z-
Fig. 7. LWC configuration with DO-CCII.
Fig. 8. Projection of Iris data to the origin.
Manuscript ID TNN-2011-P-2933
5
VI. REALIZATION OF THE CORE CIRCUIT, LINEARLY
WEIGHTING COEFFICIENTS AND TEST RESULTS
A. CMOS Realizations
The layout of the CC and of the IC including 3 CCs, 9
current conveyors and 3 current buffers have been designed
using MENTOR software with fabrication parameters for the
CMOS AMS 0.35 µm process [24]. The die photo of the
manufactured IC, called DU-TCC 1209, is shown in Fig. 6. In
order to provide user tunability all 52 pins had to be used for
I/O access, causing the pads dominate IC area, thus a pad
limited design. DU-TCC 1209 has a 2.62×2.62 mm2
die area
and CMOS transistors’ dimensions of the CC are given in
Table I.
The block diagram of the LWC using a Dual Output Second
Generation Current Conveyor (DO-CCII) [16] is shown in Fig.
7. The voltage Vy is the input and the current Iz+ and Iz- are the
outputs of the circuit in Fig. 7; these output currents can be
expressed as:
R
VI
yz
R
VI
yz
The resistance R is used to convert the voltage input data
Vy, to current; moreover, the ratio 1/R provides the appropriate
weight value for the realization. It is worthwhile mentioning
that the DO-CCII can also be used to provide negative weight
values using the Z- terminal in case the need arises.
B. Experimental Setting and Applications
The 4-D Iris dataset has 150 samples with equal number
from three classes (c1, c2, c3). Taking 40 data from each class
and using Fisher’s LDA, the coefficients of the projection
(eigen)vector are obtained as:
140100800570 ....v
. (14)
The projection of the Iris data using v
(the scalar product
xvT ) is shown in Fig. 8. It can be seen from Fig. 8 that the
data belonging to three different classes can be separated with
appropriate boundaries (DTH); these boundaries determine the
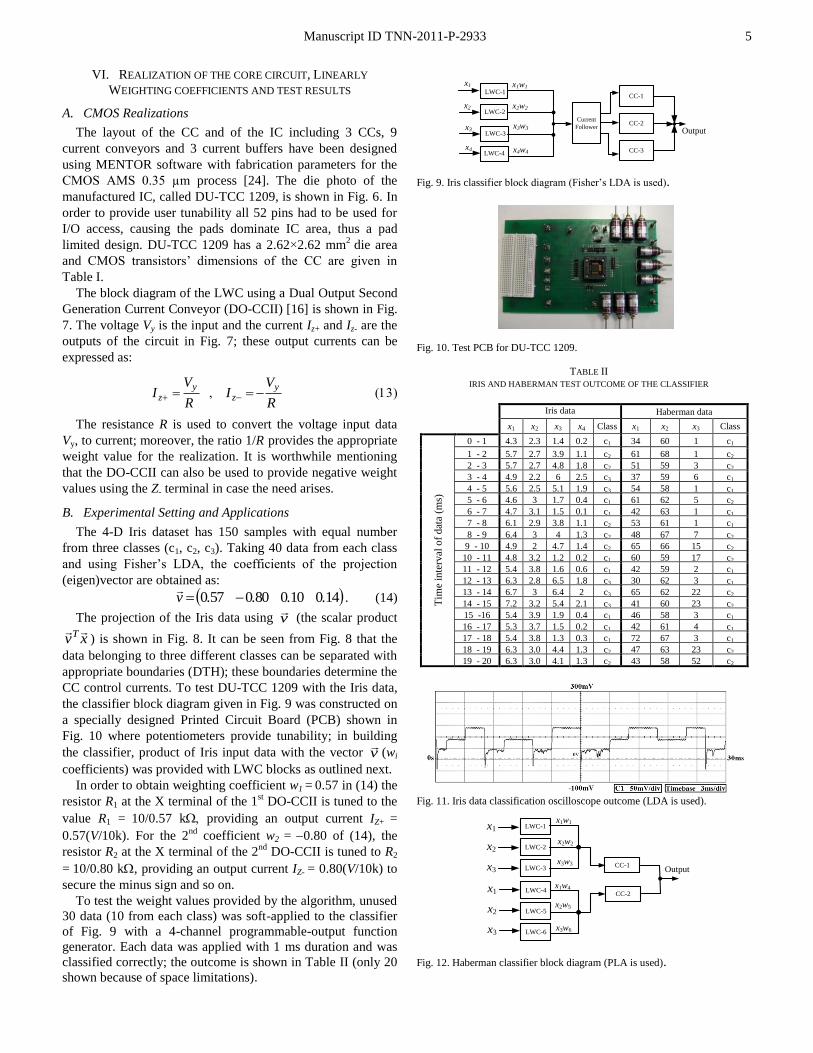
CC control currents. To test DU-TCC 1209 with the Iris data,
the classifier block diagram given in Fig. 9 was constructed on
a specially designed Printed Circuit Board (PCB) shown in
Fig. 10 where potentiometers provide tunability; in building
the classifier, product of Iris input data with the vector v
(wi
coefficients) was provided with LWC blocks as outlined next.
In order to obtain weighting coefficient w1 = 0.57 in (14) the
resistor R1 at the X terminal of the 1st DO-CCII is tuned to the
value R1 = 10/0.57 k providing an output current IZ+ =
0.57(V/10k). For the 2nd
coefficient w2 = 0.80 of (14), the
resistor R2 at the X terminal of the 2nd
DO-CCII is tuned to R2
= 10/0.80 k, providing an output current IZ- = 0.80(V/10k) to
secure the minus sign and so on.
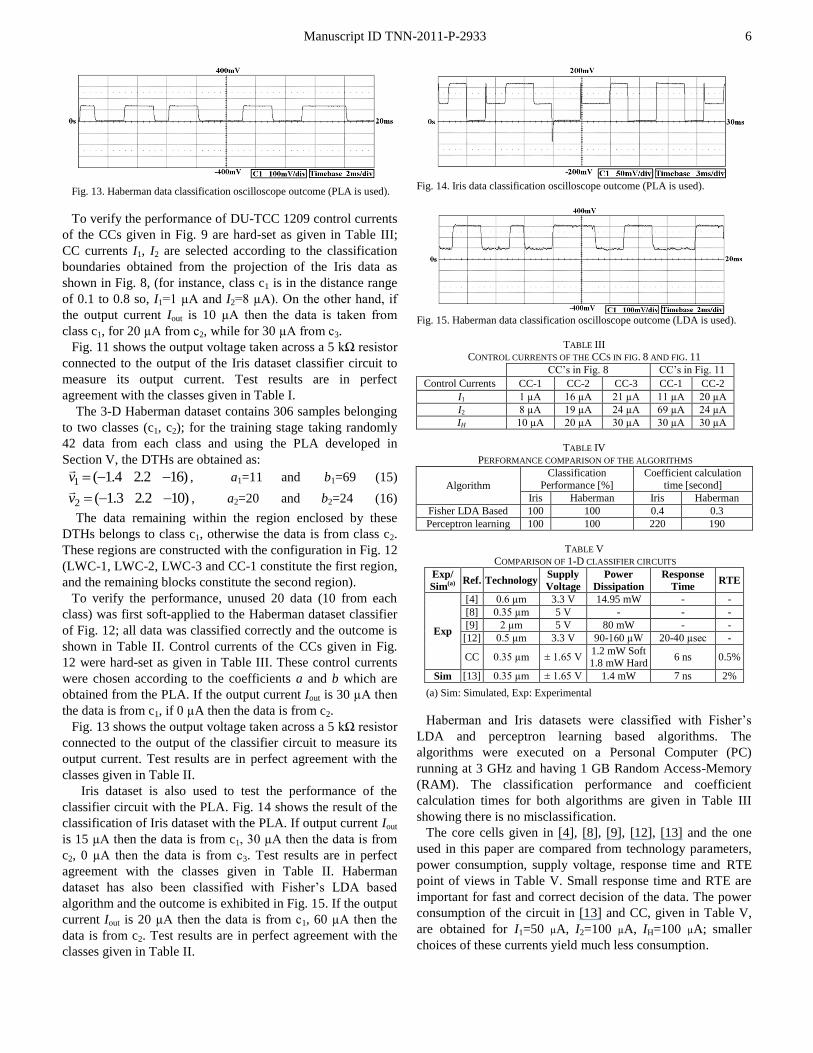
To test the weight values provided by the algorithm, unused
30 data (10 from each class) was soft-applied to the classifier
of Fig. 9 with a 4-channel programmable-output function
generator. Each data was applied with 1 ms duration and was
classified correctly; the outcome is shown in Table II (only 20
shown because of space limitations).
LWC-1
x1
LWC-2x2
LWC-3x3
LWC-4x4
Current
Follower
CC-1
CC-2
CC-3
Output
x1w1
x2w2
x3w3
x4w4
Fig. 9. Iris classifier block diagram (Fisher’s LDA is used).
Fig. 10. Test PCB for DU-TCC 1209.
TABLE II IRIS AND HABERMAN TEST OUTCOME OF THE CLASSIFIER
Iris data
Haberman data
x1 x2 x3 x4 Class x1 x2 x3 Class
Tim
e in
terv
al o
f d
ata
(ms)
0 - 1 4.3 2.3 1.4 0.2 c1 34 60 1 c1
1 - 2 5.7 2.7 3.9 1.1 c2 61 68 1 c2
2 - 3 5.7 2.7 4.8 1.8 c2 51 59 3 c2
3 - 4 4.9 2.2 6 2.5 c3 37 59 6 c1
4 - 5 5.6 2.5 5.1 1.9 c3 54 58 1 c1
5 - 6 4.6 3 1.7 0.4 c1 61 62 5 c2
6 - 7 4.7 3.1 1.5 0.1 c1 42 63 1 c1
7 - 8 6.1 2.9 3.8 1.1 c2 53 61 1 c1
8 - 9 6.4 3 4 1.3 c2 48 67 7 c2
9 - 10 4.9 2 4.7 1.4 c2 65 66 15 c2
10 - 11 4.8 3.2 1.2 0.2 c1 60 59 17 c2
11 - 12 5.4 3.8 1.6 0.6 c1 42 59 2 c1
12 - 13 6.3 2.8 6.5 1.8 c3 30 62 3 c1
13 - 14 6.7 3 6.4 2 c3 65 62 22 c2
14 - 15 7.2 3.2 5.4 2.1 c3 41 60 23 c2
15 -16 5.4 3.9 1.9 0.4 c1 46 58 3 c1
16 - 17 5.3 3.7 1.5 0.2 c1 42 61 4 c1
17 - 18 5.4 3.8 1.3 0.3 c1 72 67 3 c1
18 - 19 6.3 3.0 4.4 1.3 c2 47 63 23 c2
19 - 20 6.3 3.0 4.1 1.3 c2 43 58 52 c2
Fig. 11. Iris data classification oscilloscope outcome (LDA is used).
LWC-1x1
LWC-2x2
LWC-3x3CC-1
Output
LWC-4x1
LWC-5x2
LWC-6x3
CC-2
x1w1
x2w2
x3w3
x1w4
x2w5
x3w6
Fig. 12. Haberman classifier block diagram (PLA is used).
Manuscript ID TNN-2011-P-2933
6
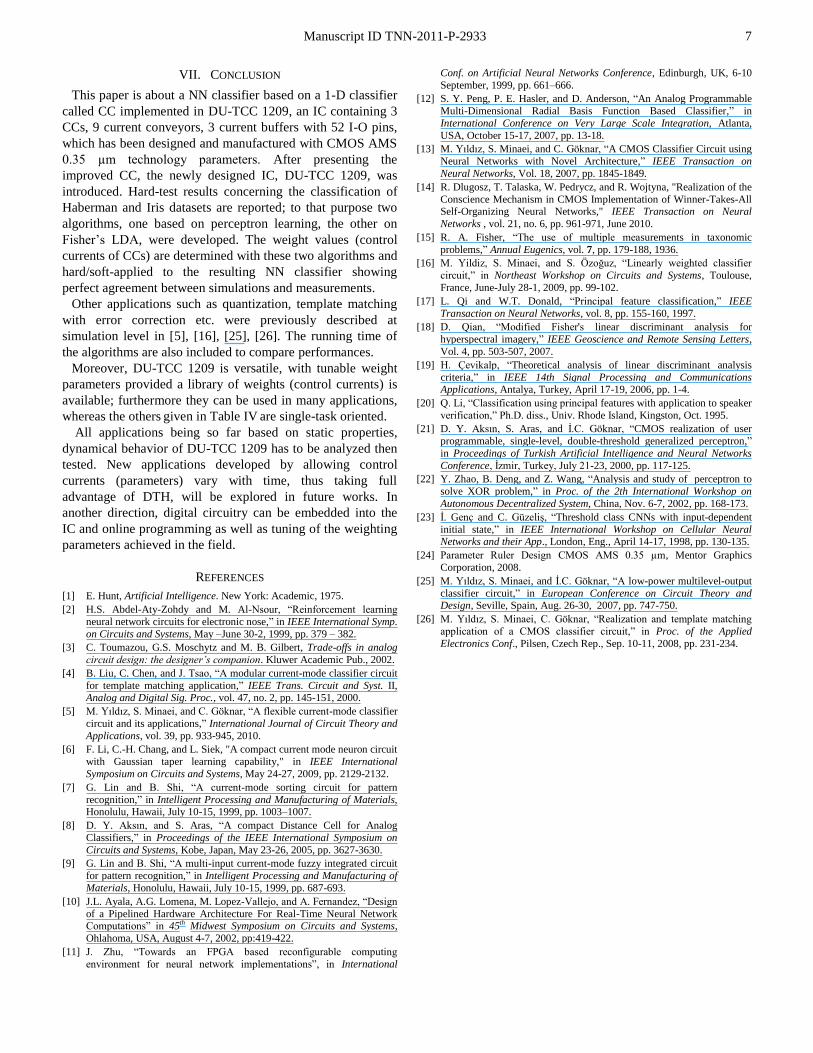
Fig. 13. Haberman data classification oscilloscope outcome (PLA is used).
To verify the performance of DU-TCC 1209 control currents
of the CCs given in Fig. 9 are hard-set as given in Table III;
CC currents I1, I2 are selected according to the classification
boundaries obtained from the projection of the Iris data as
shown in Fig. 8, (for instance, class c1 is in the distance range
of 0.1 to 0.8 so, I1=1 µA and I2=8 µA). On the other hand, if
the output current Iout is 10 µA then the data is taken from
class c1, for 20 µA from c2, while for 30 µA from c3.
Fig. 11 shows the output voltage taken across a 5 kΩ resistor
connected to the output of the Iris dataset classifier circuit to
measure its output current. Test results are in perfect
agreement with the classes given in Table I.
The 3-D Haberman dataset contains 306 samples belonging
to two classes (c1, c2); for the training stage taking randomly
42 data from each class and using the PLA developed in
Section V, the DTHs are obtained as:
)162.24.1(1 v
, a1=11 and b1=69 (15)
)102.23.1(2 v
, a2=20 and b2=24 (16)
The data remaining within the region enclosed by these
DTHs belongs to class c1, otherwise the data is from class c2.
These regions are constructed with the configuration in Fig. 12
(LWC-1, LWC-2, LWC-3 and CC-1 constitute the first region,
and the remaining blocks constitute the second region).
To verify the performance, unused 20 data (10 from each
class) was first soft-applied to the Haberman dataset classifier
of Fig. 12; all data was classified correctly and the outcome is
shown in Table II. Control currents of the CCs given in Fig.
12 were hard-set as given in Table III. These control currents
were chosen according to the coefficients a and b which are
obtained from the PLA. If the output current Iout is 30 µA then
the data is from c1, if 0 µA then the data is from c2.
Fig. 13 shows the output voltage taken across a 5 kΩ resistor
connected to the output of the classifier circuit to measure its
output current. Test results are in perfect agreement with the
classes given in Table II.
Iris dataset is also used to test the performance of the
classifier circuit with the PLA. Fig. 14 shows the result of the
classification of Iris dataset with the PLA. If output current Iout
is 15 µA then the data is from c1, 30 µA then the data is from
c2, 0 µA then the data is from c3. Test results are in perfect
agreement with the classes given in Table II. Haberman
dataset has also been classified with Fisher’s LDA based
algorithm and the outcome is exhibited in Fig. 15. If the output
current Iout is 20 µA then the data is from c1, 60 µA then the
data is from c2. Test results are in perfect agreement with the
classes given in Table II.
Fig. 14. Iris data classification oscilloscope outcome (PLA is used).
Fig. 15. Haberman data classification oscilloscope outcome (LDA is used).
TABLE III
CONTROL CURRENTS OF THE CCS IN FIG. 8 AND FIG. 11
CC’s in Fig. 8 CC’s in Fig. 11
Control Currents CC-1 CC-2 CC-3 CC-1 CC-2
I1 1 µA 16 µA 21 µA 11 µA 20 µA
I2 8 µA 19 µA 24 µA 69 µA 24 µA
IH 10 µA 20 µA 30 µA 30 µA 30 µA
TABLE IV
PERFORMANCE COMPARISON OF THE ALGORITHMS
Algorithm
Classification
Performance [%]
Coefficient calculation
time [second]
Iris Haberman Iris Haberman
Fisher LDA Based 100 100 0.4 0.3
Perceptron learning 100 100 220 190
TABLE V
COMPARISON OF 1-D CLASSIFIER CIRCUITS
Exp/
Sim(a) Ref. Technology
Supply
Voltage
Power
Dissipation
Response
Time RTE
Exp
[4] 0.6 µm 3.3 V 14.95 mW - -
[8] 0.35 µm 5 V - - -
[9] 2 µm 5 V 80 mW - -
[12] 0.5 µm 3.3 V 90-160 µW 20-40 µsec -
CC 0.35 µm ± 1.65 V 1.2 mW Soft 1.8 mW Hard
6 ns 0.5%
Sim [13] 0.35 µm ± 1.65 V 1.4 mW 7 ns 2%
(a) Sim: Simulated, Exp: Experimental
Haberman and Iris datasets were classified with Fisher’s
LDA and perceptron learning based algorithms. The
algorithms were executed on a Personal Computer (PC)
running at 3 GHz and having 1 GB Random Access-Memory
(RAM). The classification performance and coefficient
calculation times for both algorithms are given in Table III
showing there is no misclassification.
The core cells given in [4], [8], [9], [12], [13] and the one
used in this paper are compared from technology parameters,
power consumption, supply voltage, response time and RTE
point of views in Table V. Small response time and RTE are
important for fast and correct decision of the data. The power
consumption of the circuit in [13] and CC, given in Table V,
are obtained for I1=50 µA, I2=100 µA, IH=100 µA; smaller
choices of these currents yield much less consumption.
Manuscript ID TNN-2011-P-2933
7
VII. CONCLUSION
This paper is about a NN classifier based on a 1-D classifier
called CC implemented in DU-TCC 1209, an IC containing 3
CCs, 9 current conveyors, 3 current buffers with 52 I-O pins,
which has been designed and manufactured with CMOS AMS
0.35 µm technology parameters. After presenting the
improved CC, the newly designed IC, DU-TCC 1209, was
introduced. Hard-test results concerning the classification of
Haberman and Iris datasets are reported; to that purpose two
algorithms, one based on perceptron learning, the other on
Fisher’s LDA, were developed. The weight values (control
currents of CCs) are determined with these two algorithms and
hard/soft-applied to the resulting NN classifier showing
perfect agreement between simulations and measurements.
Other applications such as quantization, template matching
with error correction etc. were previously described at
simulation level in [5], [16], [25], [26]. The running time of
the algorithms are also included to compare performances.
Moreover, DU-TCC 1209 is versatile, with tunable weight
parameters provided a library of weights (control currents) is
available; furthermore they can be used in many applications,
whereas the others given in Table IV are single-task oriented.
All applications being so far based on static properties,
dynamical behavior of DU-TCC 1209 has to be analyzed then
tested. New applications developed by allowing control
currents (parameters) vary with time, thus taking full
advantage of DTH, will be explored in future works. In
another direction, digital circuitry can be embedded into the
IC and online programming as well as tuning of the weighting
parameters achieved in the field.
REFERENCES
[1] E. Hunt, Artificial Intelligence. New York: Academic, 1975.
[2] H.S. Abdel-Aty-Zohdy and M. Al-Nsour, “Reinforcement learning
neural network circuits for electronic nose,” in IEEE International Symp.
on Circuits and Systems, May –June 30-2, 1999, pp. 379 – 382.
[3] C. Toumazou, G.S. Moschytz and M. B. Gilbert, Trade-offs in analog
circuit design: the designer’s companion. Kluwer Academic Pub., 2002.
[4] B. Liu, C. Chen, and J. Tsao, “A modular current-mode classifier circuit
for template matching application,” IEEE Trans. Circuit and Syst. II, Analog and Digital Sig. Proc., vol. 47, no. 2, pp. 145-151, 2000.
[5] M. Yıldız, S. Minaei, and C. Göknar, “A flexible current-mode classifier
circuit and its applications,” International Journal of Circuit Theory and
Applications, vol. 39, pp. 933-945, 2010.
[6] F. Li, C.-H. Chang, and L. Siek, "A compact current mode neuron circuit
with Gaussian taper learning capability," in IEEE International
Symposium on Circuits and Systems, May 24-27, 2009, pp. 2129-2132.
[7] G. Lin and B. Shi, “A current-mode sorting circuit for pattern
recognition,” in Intelligent Processing and Manufacturing of Materials, Honolulu, Hawaii, July 10-15, 1999, pp. 1003–1007.
[8] D. Y. Aksın, and S. Aras, “A compact Distance Cell for Analog
Classifiers,” in Proceedings of the IEEE International Symposium on
Circuits and Systems, Kobe, Japan, May 23-26, 2005, pp. 3627-3630.
[9] G. Lin and B. Shi, “A multi-input current-mode fuzzy integrated circuit
for pattern recognition,” in Intelligent Processing and Manufacturing of
Materials, Honolulu, Hawaii, July 10-15, 1999, pp. 687-693.
[10] J.L. Ayala, A.G. Lomena, M. Lopez-Vallejo, and A. Fernandez, “Design
of a Pipelined Hardware Architecture For Real-Time Neural Network Computations” in 45th Midwest Symposium on Circuits and Systems,
Ohlahoma, USA, August 4-7, 2002, pp:419-422.
[11] J. Zhu, “Towards an FPGA based reconfigurable computing
environment for neural network implementations”, in International
Conf. on Artificial Neural Networks Conference, Edinburgh, UK, 6-10
September, 1999, pp. 661–666.
[12] S. Y. Peng, P. E. Hasler, and D. Anderson, “An Analog Programmable
Multi-Dimensional Radial Basis Function Based Classifier,” in
International Conference on Very Large Scale Integration, Atlanta,
USA, October 15-17, 2007, pp. 13-18.
[13] M. Yıldız, S. Minaei, and C. Göknar, “A CMOS Classifier Circuit using
Neural Networks with Novel Architecture,” IEEE Transaction on
Neural Networks, Vol. 18, 2007, pp. 1845-1849.
[14] R. Dlugosz, T. Talaska, W. Pedrycz, and R. Wojtyna, "Realization of the
Conscience Mechanism in CMOS Implementation of Winner-Takes-All Self-Organizing Neural Networks," IEEE Transaction on Neural
Networks , vol. 21, no. 6, pp. 961-971, June 2010.
[15] R. A. Fisher, “The use of multiple measurements in taxonomic
problems,” Annual Eugenics, vol. 7, pp. 179-188, 1936.
[16] M. Yildiz, S. Minaei, and S. Özoğuz, “Linearly weighted classifier
circuit,” in Northeast Workshop on Circuits and Systems, Toulouse,
France, June-July 28-1, 2009, pp. 99-102.
[17] L. Qi and W.T. Donald, “Principal feature classification,” IEEE
Transaction on Neural Networks, vol. 8, pp. 155-160, 1997.
[18] D. Qian, “Modified Fisher's linear discriminant analysis for
hyperspectral imagery,” IEEE Geoscience and Remote Sensing Letters,
Vol. 4, pp. 503-507, 2007.
[19] H. Çevikalp, “Theoretical analysis of linear discriminant analysis
criteria,” in IEEE 14th Signal Processing and Communications Applications, Antalya, Turkey, April 17-19, 2006, pp. 1-4.
[20] Q. Li, “Classification using principal features with application to speaker
verification,” Ph.D. diss., Univ. Rhode Island, Kingston, Oct. 1995.
[21] D. Y. Aksın, S. Aras, and İ.C. Göknar, “CMOS realization of user
programmable, single-level, double-threshold generalized perceptron,”
in Proceedings of Turkish Artificial Intelligence and Neural Networks
Conference, İzmir, Turkey, July 21-23, 2000, pp. 117-125.
[22] Y. Zhao, B. Deng, and Z. Wang, “Analysis and study of perceptron to
solve XOR problem,” in Proc. of the 2th International Workshop on
Autonomous Decentralized System, China, Nov. 6-7, 2002, pp. 168-173.
[23] İ. Genç and C. Güzeliş, “Threshold class CNNs with input-dependent
initial state,” in IEEE International Workshop on Cellular Neural Networks and their App., London, Eng., April 14-17, 1998, pp. 130-135.
[24] Parameter Ruler Design CMOS AMS 0.35 µm, Mentor Graphics
Corporation, 2008.
[25] M. Yıldız, S. Minaei, and İ.C. Göknar, “A low-power multilevel-output
classifier circuit,” in European Conference on Circuit Theory and Design, Seville, Spain, Aug. 26-30, 2007, pp. 747-750.
[26] M. Yıldız, S. Minaei, C. Göknar, “Realization and template matching
application of a CMOS classifier circuit,” in Proc. of the Applied
Electronics Conf., Pilsen, Czech Rep., Sep. 10-11, 2008, pp. 231-234.