dfisher etls 747 paper - optimal power flow
TRANSCRIPT
1
The Optimal Power Flow Problem:
Definitions, Solutions, and Challenges Daniel R. Fisher, MSEE Student, University of St. Thomas
in partial fulfillment of
ETLS 747 Electric Machines
Dr. Cal Hardie
Spring 2016
Abstract
Grid level power systems are designed to deliver power from generators to customer
loads as economically as possible while operating within the various equipment constraints (e.g.
transmission line and transformer thermal limits, generator real and reactive power limits,
scheduled tie-line power flows, etc.). This must be managed while simultaneously maintaining
system stability, such as controlling for area frequency, bus voltage magnitudes and phases, and
real and reactive power flows. The problem, called Optimal Power Flow (OPF), has been well
defined since the 1960s but has proven difficult to solve [1]. It is comprised of a coupled system
of non-linear equations for which no exact solution can be found. Instead, iterative algorithms
are employed to solve the problem numerically. For a moderately sized grid, there are typically
hundreds of generators providing power to thousands of buses. Advances in CPU speeds have
enabled faster and more precise numerical solutions, but are still unable to solve the entire
problem quickly enough for certain applications. This project gives an overview of the OPF
problem, defines the important variables and constraints, demonstrates the time required for
solving IEEE test networks using a MATLAB package called MATPOWER, and discusses
methodologies for improving solution times.

2
Introduction
Since the advent of large electrical grids in the first half of the 20th century, system
operators have concerned themselves with providing reliable service to their customers at a
minimum of cost. This involves meeting a varying demand for electricity over the course of each
24-hour period. Multiple generators inject real and reactive power at certain locations (generator
or PV buses) which is sent over transmission lines of varying lengths for customers to receive at
the other ends (load or PQ buses).
Peter Fox-Penner describes the electric power grid in his 2014 book, Smart Power [2],
with a “pond system analogue.” Imagine a network of ponds connected by free flowing channels,
as in Figure 1. The ponds are fed by water towers adding water to the ponds. Simultaneously,
homes draw water out of the ponds for their own use via pipes. At all times, the water added
from the towers must balance the water drawn out by the homes. Otherwise the ponds could
either flood or dry up. Note that the water drawn by one home is not necessarily from one tower,
but instead drawn from the collective contribution of all towers to the pond system.
Figure 1. “Pond system analogue” for the power grid (Fig. 3-1 from Smart Power [2])

3
In the grid, generators act as the water towers, transmission lines are similar to the
interconnecting channels, and customers draw real and reactive power for loads similar to the
homes drawing water from the ponds. However, this balance between generation and load must
be maintained over much smaller time scales than the pond system analogy suggests. At all
moments the power produced by generators must be equal to the power consumed at loads (there
is not often large scale energy storage on the grid like the ponds in the analogy above).
Original operators of early 20th century power grids dealt with this balancing act in a
variety of ad hoc ways. These could involve modeling a power system with a smaller analog
analyzer. Calculations were done on special slide rules. In the end, system adjustments were
often made with a good deal of experienced engineering judgment and intuition.
The problem of optimal power flow was well defined in 1962 [3], but finding a solution
that is fast enough for large power grids remains elusive even today. As we will see, the problem
involves minimizing a non-linear objective function (system cost in $/hr) subject to a large
number of non-linear equality constraints (power flow equations) along with other inequality
constraints (power limitations of generators, transformers and transmission lines). It is a problem
that requires a solution as often as every 5 minutes, accomplished for large systems only through
varying degrees of approximation. More accurate solutions to the optimal power flow problem
could provide an increase in efficiency of 5% for energy markets worldwide, leading to savings
of $19 billion annually in the United States alone [1, p. 5].
This paper will provide an overview of power flow and economic dispatch, then discuss
how they are combined into the optimal power flow (OPF) problem. Finally, various solvers will
be used in MATLAB to illustrate the challenges encountered when trying to solve OPF
problems.
Power Flow
Consider the simple 2-bus system in Figure 2 where the transmission line is modeled as
inductive only.
Figure 2. A simple 2-bus system.
The real and reactive power transmitted to the receiving bus is:
(1)
(2).
We see that the variables related to power flow at each bus are P, Q, voltage magnitude V, and
voltage angle . In order to maintain frequency synchronicity, is kept small. It is important to
note that for small voltage angles, sin ≈ and cos ≈ 1. This fact means that P is closely
𝑃𝑅 =𝑉𝑆𝑉𝑅𝑋
sin 𝛿
𝑄𝑅 =𝑉𝑆𝑉𝑅𝑋
cos 𝛿 −𝑉𝑅2
𝑋

4
coupled to , and Q is closely coupled to V. This will later lead to the decoupling of the P- and
Q-V power flow equations to allow for faster approximate solutions.
For more than two buses, the power flow at each bus is affected by each of the other
interconnected buses. Consider N-buses connected by transmission lines expresses by the
standard bus admittance matrix Ybus. If ymn is the total complex admittance between bus-m and
bus-n, and ymm is the shunt admittance from bus-m to earth ground, then
(3)
(4).
For computation convenience, each element of the Ybus matrix can be expressed in polar form.
(5)
The power flow at the kth bus is then
(6)
(7).
Each bus is specified by 4 variables (P, Q, V, and , but 2 variables are assumed as given
and 2 are unknown. Generators are considered PV-buses where known real power P is injected at
voltage magnitude V, but Q and need to be solved. Loads are expressed as PQ-buses where
known real and reactive power is consumed and and V need to be solved. Finally, one bus is
left as a reference or slack bus where V = 1.0 pu and = 0o (typically), but P and Q need to be
solved to “pick up the slack” of the system. The slack bus is left until the end and simply back-
solved once the other buses are found. We are left with 2(N – 1) non-linear equations to solve for
an equal number of unknown variables. This can be done through various numerical solvers,
among which the Newton-Raphson method is the most common [4].
At this point it is worth noting that the real power set points for each generator in the
network is specified before running the power flow solution (with the exception of the slack
bus). The question remains, which generators should be most utilized to provide power for the
required loads? The answer lies in considering the economics of running each generator.
Economic Dispatch
A system operator must decide what power each generator in the system should provide
in order to meet the ever changing customer demand. However, the power flow equations do not
provide this information. For example, consider the system of Figures 3a and 3b. Both
configurations provide the necessary real and reactive power to the load bus, but which is
Y𝑘𝑘 = ∑𝑦𝑘𝑛
𝑁
𝑛=1
Y𝑘𝑖 = −𝑦𝑘𝑖
Y𝑘𝑛 = 𝑌𝑘𝑛𝑒𝑗𝜃𝑘𝑛

5
favored? The costs associated with running each generator must be included in the decision such
that the system runs at the lowest possible overall cost. This process of finding the lowest cost
configuration is called Economic Dispatch.
Figure 3a. A possible dispatch where each generator carries half the required load.
Figure 3b. Another dispatch where the slack generator provides significantly less than half the real power to the
system.
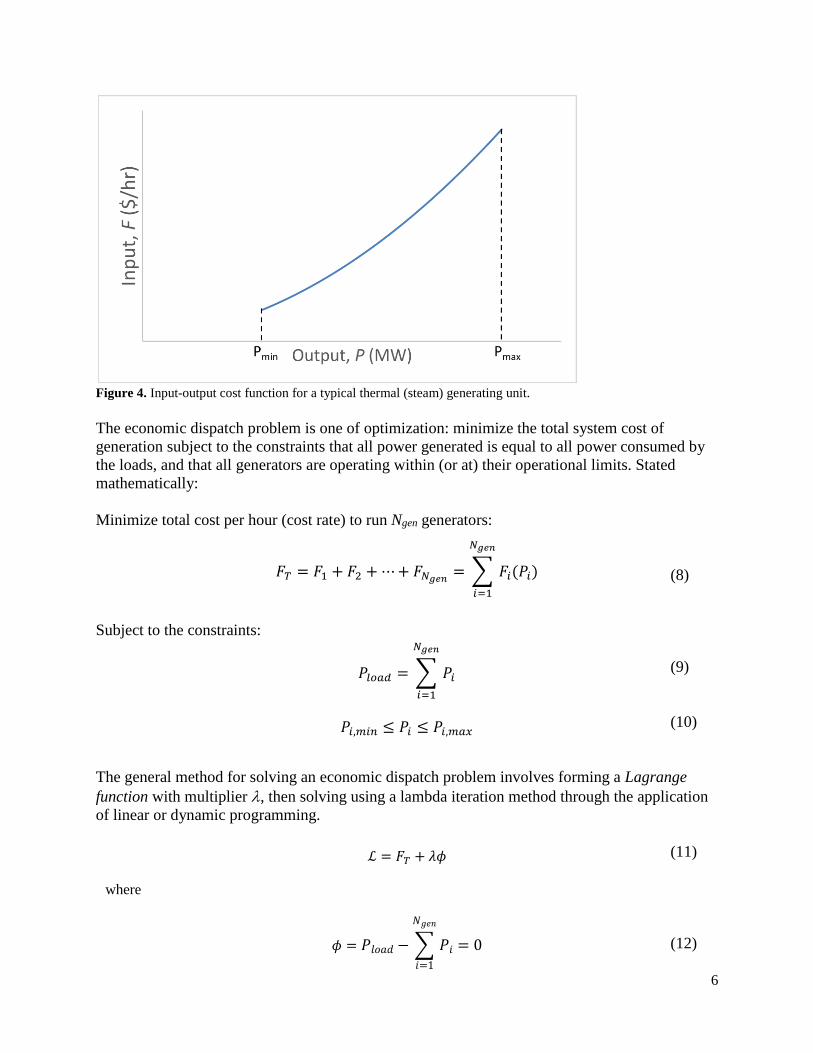
Each generator has associated with it a cost rate function F(P) expressing the $/hr
required to run the generator as a function of output real power, P. The function can be modeled
in different ways, but is typically either quadratic (as in Figure 4) or piecewise-linear. Generators
have both a maximum and minimum power output Pmin and Pmax ind which they can operate
efficiently.
6
Figure 4. Input-output cost function for a typical thermal (steam) generating unit.
The economic dispatch problem is one of optimization: minimize the total system cost of
generation subject to the constraints that all power generated is equal to all power consumed by
the loads, and that all generators are operating within (or at) their operational limits. Stated
mathematically:
Minimize total cost per hour (cost rate) to run Ngen generators:
(8)
Subject to the constraints:
(9)
(10)
The general method for solving an economic dispatch problem involves forming a Lagrange
function with multiplier , then solving using a lambda iteration method through the application
of linear or dynamic programming.
(11)
(12)
𝐹𝑇 = 𝐹1 + 𝐹2 +⋯+ 𝐹𝑁𝑔𝑒𝑛 = ∑ 𝐹𝑖(𝑃𝑖)
𝑁𝑔𝑒𝑛
𝑖=1
𝑃𝑙𝑜𝑎𝑑 = ∑ 𝑃𝑖
𝑁𝑔𝑒𝑛
𝑖=1
𝑃𝑖,𝑚𝑖𝑛 ≤ 𝑃𝑖 ≤ 𝑃𝑖,𝑚𝑎𝑥
ℒ = 𝐹𝑇 + 𝜆𝜙
where
𝜙 = 𝑃𝑙𝑜𝑎𝑑 − ∑ 𝑃𝑖
𝑁𝑔𝑒𝑛
𝑖=1
= 0
7
The Lagrange multiplier is interpreted as the incremental (marginal) cost, dF/dP. It can be
shown that the total system cost is minimized (assuming all generators are operating within
power limits) when all generators run at the same incremental cost [5]:
(13)
When the boundaries of the inequality constraints are included, the additional formal conditions
of the Karush-Kuhn-Tucker (KKT) method are required:
(14)
(15)
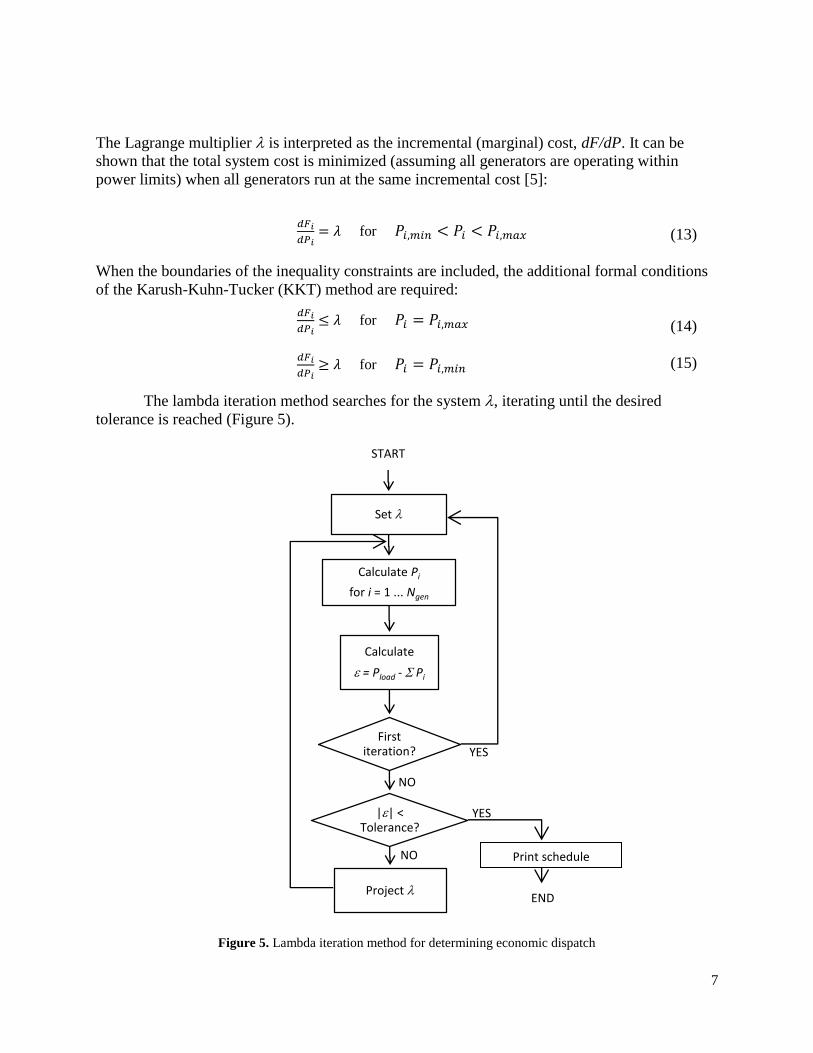
The lambda iteration method searches for the system , iterating until the desired
tolerance is reached (Figure 5).
Figure 5. Lambda iteration method for determining economic dispatch
START
Set
Calculate Pi
for i = 1 ... Ngen
Calculate
e = Pload - S Pi
First iteration?
|e| < Tolerance?
Project
𝑑𝐹𝑖
𝑑𝑃𝑖= 𝜆 for 𝑃𝑖,𝑚𝑖𝑛 < 𝑃𝑖 < 𝑃𝑖,𝑚𝑎𝑥
𝑑𝐹𝑖
𝑑𝑃𝑖≤ 𝜆 for 𝑃𝑖 = 𝑃𝑖,𝑚𝑎𝑥
𝑑𝐹𝑖
𝑑𝑃𝑖≥ 𝜆 for 𝑃𝑖 = 𝑃𝑖,𝑚𝑖𝑛
Print schedule
END
YES
NO
NO
YES
8
Optimal Power Flow
Optimal power flow seeks to minimize the total system cost function FT, while at the
same time solving the system power flow. Since the transmission line admittances are built into
the power flow solution there is no need to separately consider losses when solving for economic
dispatch. Summarizing the OPF problem:
Minimize the total system generation cost FT (Eqn. 8)
Include generator limit inequality constraints for real and reactive power (Eqn. 10 and
similar for reactive power, Qi,min ≤ Qi ≤ Qi,min)
Include transmission system thermal inequality constraints, expressed as either apparent
power or effective current limits for lines and transformers
Include bus voltage magnitude inequality constraints, Vi,min ≤ Vi ≤ Vi,min
Include equality constraints for real and reactive power flow (Eqns. 6 and 7)
This problem is LARGE, requiring the repeated solving of 2(N – 1) nonlinear equations
while trying to optimize (minimize) an objective function subject to a large number of
constraints. A moderately sized power system can have thousands of voltage buses with
hundreds of generating units. For large grids the buses number in the tens of thousands. Couple
this with the need to solve for OPF repeatedly to economically schedule generators for a
constantly changing demanded load. The more often OPF needs to be solved, the less time there
is to solve it. It must be solved [1]:
Weekly in 8 hrs
Daily in 2 hrs
Hourly in 15 min
Every 5 min in 1 min
Perhaps every 30s as we move toward “self-healing” smart grids
Despite the fact that computation speeds have increased by a factor of 107 over the 20
years leading up to 2012 [1], modern computers are still not fast enough to solve the full OPF
problem as often as it is needed. As such, approximate models are employed. Most common is
the so-call “DC” OPF.
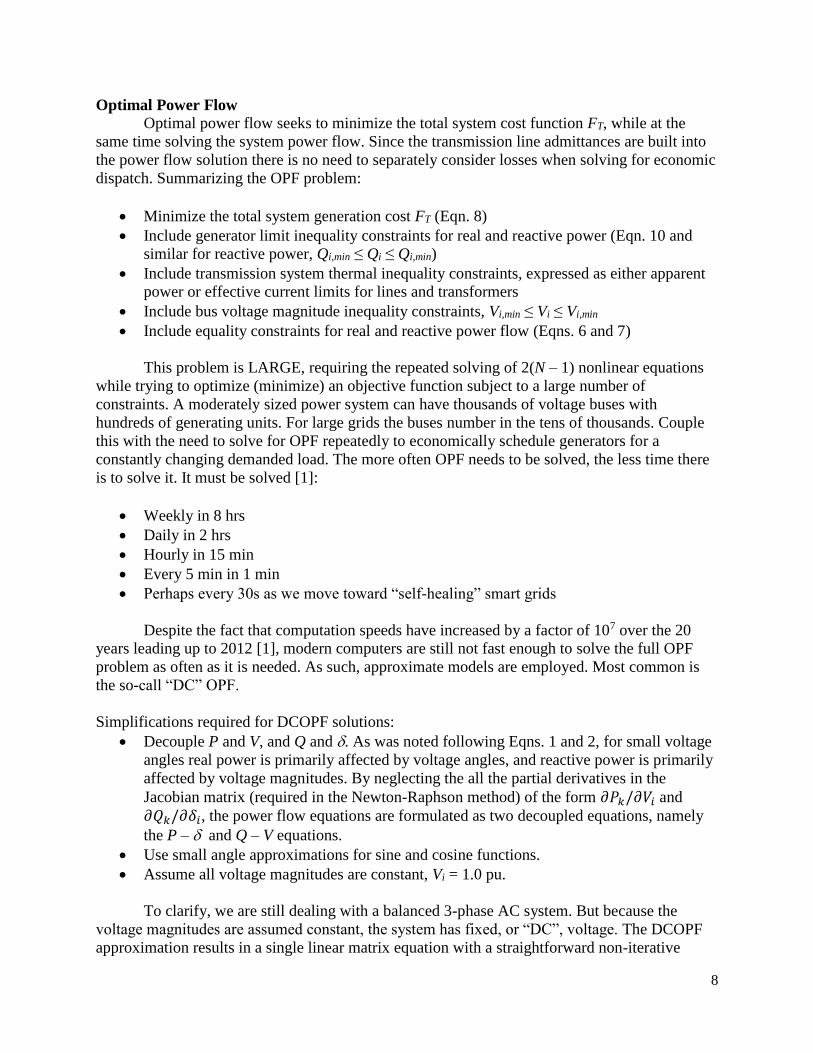
Simplifications required for DCOPF solutions:
Decouple P and V, and Q and . As was noted following Eqns. 1 and 2, for small voltage
angles real power is primarily affected by voltage angles, and reactive power is primarily
affected by voltage magnitudes. By neglecting the all the partial derivatives in the
Jacobian matrix (required in the Newton-Raphson method) of the form 𝜕𝑃𝑘/𝜕𝑉𝑖 and
𝜕𝑄𝑘/𝜕𝛿𝑖, the power flow equations are formulated as two decoupled equations, namely
the P – and Q – V equations.
Use small angle approximations for sine and cosine functions.
Assume all voltage magnitudes are constant, Vi = 1.0 pu.
To clarify, we are still dealing with a balanced 3-phase AC system. But because the
voltage magnitudes are assumed constant, the system has fixed, or “DC”, voltage. The DCOPF
approximation results in a single linear matrix equation with a straightforward non-iterative

9
solution. While this approximate solution is significantly faster than the full ACOPF, it is limited
to real (MW) power information, since the reactive power is completely neglected.
The full ACOPF has about twice as many variables as the DCOPF formulation.
Furthermore, the ACOPF network equations are non-linear, making it much more difficult to
reliably solve. It can be approached by solving an initial power flow and using it as an operating
point Pgen0, Qgen
0, V0 and 0 about which the objective function and constraints are linearized.
Then the techniques of linear programming (the details of which are not covered in this paper)
can be used to iterate towards a solution.
Steps for the incremental linear programming (LP) solution to the ACOPF [5, p. 372]:
1) Solve a base power flow
2) Linearize the objective function
3) Linearize the constraints (including power flow equations with full Jacobian matrix)
4) Set variable limits
5) Solve the LP
6) Check P, Q, V tolerances and go to step 1 at a new operating point as necessary
Comparison of OPF Solutions
MATPOWER is a package of MATLAB M-files for solving power flow and optimal
power flow problems. It is intended as a simulation tool for researchers and educators that is easy
to use and to modify [6, 7]. Included in the package are a set of sample cases which allow for the
comparison of DCOPF and ACOPF solutions. Figures 6, 7, and 8 show a summary of
convergence times for a series of test cases performed on the author’s laptop, followed by the
MATPOWER summary of the largest included case (case9241pegase.m) for both the DCOPF
and ACOPF solvers.
Figure 6. Comparison of MATPOWER convergence times for DCOPF and ACOPF of test case networks.
Case Nbuses Ngenerators Nloads DCOPF (s) ACOPF (s) % Increase
case118 118 54 99 0.07 0.14 200
case300 300 69 201 0.20 0.24 120
case1354pegase 1354 260 673 0.70 2.15 307
case2869pegase 2869 510 1485 1.63 4.99 306
case3120sp 3120 505 2277 4.51 5.63 125
case9241pegase 9241 1445 4895 1.68 22.13 1317
10
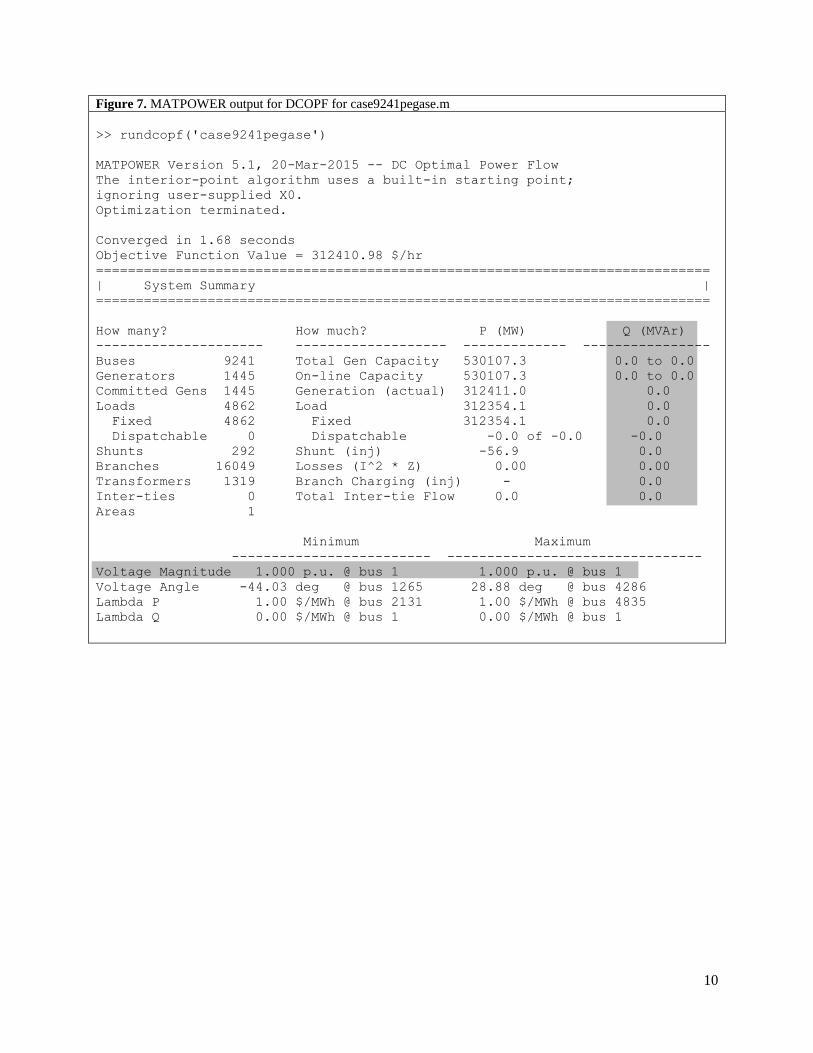
Figure 7. MATPOWER output for DCOPF for case9241pegase.m
>> rundcopf('case9241pegase')
MATPOWER Version 5.1, 20-Mar-2015 -- DC Optimal Power Flow
The interior-point algorithm uses a built-in starting point;
ignoring user-supplied X0.
Optimization terminated.
Converged in 1.68 seconds
Objective Function Value = 312410.98 $/hr
=============================================================================
| System Summary |
=============================================================================
How many? How much? P (MW) Q (MVAr)
--------------------- ------------------- ------------- ----------------
Buses 9241 Total Gen Capacity 530107.3 0.0 to 0.0
Generators 1445 On-line Capacity 530107.3 0.0 to 0.0
Committed Gens 1445 Generation (actual) 312411.0 0.0
Loads 4862 Load 312354.1 0.0
Fixed 4862 Fixed 312354.1 0.0
Dispatchable 0 Dispatchable -0.0 of -0.0 -0.0
Shunts 292 Shunt (inj) -56.9 0.0
Branches 16049 Losses (I^2 * Z) 0.00 0.00
Transformers 1319 Branch Charging (inj) - 0.0
Inter-ties 0 Total Inter-tie Flow 0.0 0.0
Areas 1
Minimum Maximum
------------------------- --------------------------------
Voltage Magnitude 1.000 p.u. @ bus 1 1.000 p.u. @ bus 1
Voltage Angle -44.03 deg @ bus 1265 28.88 deg @ bus 4286
Lambda P 1.00 $/MWh @ bus 2131 1.00 $/MWh @ bus 4835
Lambda Q 0.00 $/MWh @ bus 1 0.00 $/MWh @ bus 1
11
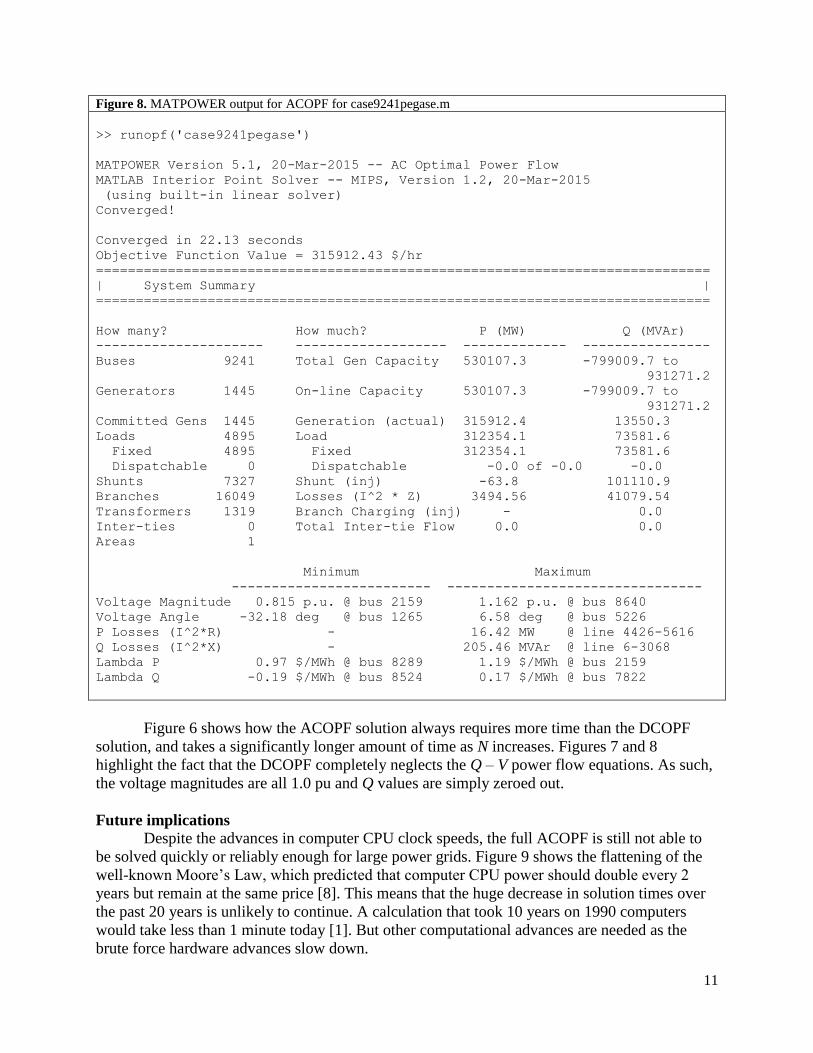
Figure 8. MATPOWER output for ACOPF for case9241pegase.m
>> runopf('case9241pegase')
MATPOWER Version 5.1, 20-Mar-2015 -- AC Optimal Power Flow
MATLAB Interior Point Solver -- MIPS, Version 1.2, 20-Mar-2015
(using built-in linear solver)
Converged!
Converged in 22.13 seconds
Objective Function Value = 315912.43 $/hr
=============================================================================
| System Summary |
=============================================================================
How many? How much? P (MW) Q (MVAr)
--------------------- ------------------- ------------- ----------------
Buses 9241 Total Gen Capacity 530107.3 -799009.7 to
931271.2
Generators 1445 On-line Capacity 530107.3 -799009.7 to
931271.2
Committed Gens 1445 Generation (actual) 315912.4 13550.3
Loads 4895 Load 312354.1 73581.6
Fixed 4895 Fixed 312354.1 73581.6
Dispatchable 0 Dispatchable -0.0 of -0.0 -0.0
Shunts 7327 Shunt (inj) -63.8 101110.9
Branches 16049 Losses (I^2 * Z) 3494.56 41079.54
Transformers 1319 Branch Charging (inj) - 0.0
Inter-ties 0 Total Inter-tie Flow 0.0 0.0
Areas 1
Minimum Maximum
------------------------- --------------------------------
Voltage Magnitude 0.815 p.u. @ bus 2159 1.162 p.u. @ bus 8640
Voltage Angle -32.18 deg @ bus 1265 6.58 deg @ bus 5226
P Losses (I^2*R) - 16.42 MW @ line 4426-5616
Q Losses (I^2*X) - 205.46 MVAr @ line 6-3068
Lambda P 0.97 $/MWh @ bus 8289 1.19 $/MWh @ bus 2159
Lambda Q -0.19 $/MWh @ bus 8524 0.17 $/MWh @ bus 7822
Figure 6 shows how the ACOPF solution always requires more time than the DCOPF
solution, and takes a significantly longer amount of time as N increases. Figures 7 and 8
highlight the fact that the DCOPF completely neglects the Q – V power flow equations. As such,
the voltage magnitudes are all 1.0 pu and Q values are simply zeroed out.
Future implications
Despite the advances in computer CPU clock speeds, the full ACOPF is still not able to
be solved quickly or reliably enough for large power grids. Figure 9 shows the flattening of the
well-known Moore’s Law, which predicted that computer CPU power should double every 2
years but remain at the same price [8]. This means that the huge decrease in solution times over
the past 20 years is unlikely to continue. A calculation that took 10 years on 1990 computers
would take less than 1 minute today [1]. But other computational advances are needed as the
brute force hardware advances slow down.

12
Figure 9. Moore’s Law has failed to predict CPU advances over the past 10 years as new chips have proven more
expensive and more difficult to cool. [8]
The problem is highlighted when looking at DCOPF and ACOPF solution times from
larger grids. Figure 10 shows convergence times for various test networks over a range
algorithm-based solvers implemented in MATLAB [7]. Note that for the largest 42k-bus
networks, the fastest full ACOPF solution took over an hour. In security-constrained studies,
where engineers are studying the effects of losing various system elements, repeated ACOPF
solutions are required. Clearly, waiting an hour for each one becomes unwieldy. Furthermore, as
more grids implement “smart switching” equipment, OPF solutions will be needed more quickly
as the system automatically adapts to changes.
Figure 10. Comparison of solution times for various test networks, implemented in MATLAB. Note that case42k
required at least 3,700 s = 61.7 min to find a single full ACOPF solution [7].

13
With individual CPU clock speeds remaining more or less constant, ACOPF solutions
that leverage parallel computing are being developed. In a 2013 industry white paper [9], FERC
states that there is “a clear advantage to employing a multistart strategy, which leverages parallel
processing in order to solve the ACOPF on large-scale networks for time-sensitive applications.”
A multistart strategy is “a global optimization procedure that applies a solution technique for
numerous starting points on parallel threads/processes and then terminates with increasing
confidence in a unique optimal solution.” These types of parallel computing strategies are easily
scalable ad hoc with available cloud computing resources.
Other research efforts are underway to find more robust solving algorithms which more
reliably converge to an optimal solution. One such paper [10] reformulates the ACOPF problem
based on a current injection approach that linearly couples the quadratic constraints at each bus.
This results in a set of linear equations rather than a set of coupled non-linear equations (Eqns. 6
and 7). These are then solved with a successive linear programming (SLP) algorithm. It was
shown that these performed favorably when compared to the best non-linear programming (NLP)
approaches.
Conclusion The Optimal Power Flow problem remains a challenge for power systems operators. The
OPF problem seeks to find a generator dispatch schedule that both minimizes the total system
cost while simultaneously satisfying the constraints imposed by transmission power flows and
component limits. A faster, more robust solution to this problem will mean savings of billions of
dollars annually. Currently, many time-sensitive applications rely on the faster approximate
DCOPF solutions which can be unsuitable for tightly coupled power systems. However,
researchers in optimization algorithms hope to achieve faster solutions to the full ACOPF
problem. This will enable the development of “smart grid” implementations with their self-
healing switching schemes. Perhaps growing resources available through scalable cloud
computing will be the key. Only time will tell.
References
[1] M. B. Cain et al., “History of Optimal Power Flow and Formulations,” FERC, 2012.
Available: http://www.ferc.gov/industries/electric/indus-act/market-planning/opf-papers/acopf-1-
history-formulation-testing.pdf
[2] P. Fox-Penner, “The New Paradigm,” in Smart Power, 2nd ed.. Washington DC: Island
Press, 2014.
[3] J. Carpentier, “Contribution á l’étude du dispatching économique,” Bulletin de la Société
Française des Électriciens, ser. 8, vol. 3, pp. 431-447, 1962.
[4] J. D. Glover et al., “Power Flows” in Power Systems Analysis and Design, 5th ed. Stamford:
Cengage Learning, 2012, ch. 6, sec. 6, pp. 334-343.
[5] A. J. Wood et al., “Economic Dispatch of Thermal Units and Methods of Solution” in
Power Generation, Operation, and Control, 3rd ed. Hoboken: John Wiley & Sons, Inc., 2014,
ch. 3, pp. 63-146.

14
[6] R. D. Zimmerman and C. E. Murillo-Sánchez, (2016, May 14). MATPOWER: A MATLAB
Power System Simulation Package. [Online]. Available: http://www.pserc.cornell.edu/matpower/
[7] R. D. Zimmerman, C. E. Murillo-Sánchez, and R. J. Thomas, "MATPOWER: Steady-State
Operations, Planning and Analysis Tools for Power Systems Research and Education," Power
Systems, IEEE Transactions on, vol. 26, no. 1, pp. 12-19, Feb. 2011.
[8] T. Cross, (2016, March 12). Technology Quarterly: After Moore’s Law. [Online]. Available:
http://www.economist.com/technology-quarterly/2016-03-12/after-moores-law
[9] A. Castillo and R. P. O’Neill, “Computational Performance of Solution Techniques Applied
to the ACOPF,” FERC, 2013. Available: http://www.ferc.gov/industries/electric/indus-
act/market-planning/opf-papers/acopf-5-computational-testing.pdf
[10] A. Castillo et al., “A Successive Linear Programming Approach to Solving the IV-
ACOPF,” Power Systems, IEEE Transactions on, vol. 31, no. 4, pp. 2752-2763, July 2016.