development of fluidic oscillators as flow control actuators
TRANSCRIPT


DEVELOPMENT OF FLUIDIC OSCILLATORS
AS FLOW CONTROL ACTUATORS
A Thesis
Submitted to the Faculty
of
Purdue University
by
James Winborn Gregory
In Partial Fulfillment of the
Requirements for the Degree
of
Doctor of Philosophy
August 2005

ii
In pursuit of Truth Great are the works of the LORD; They are studied by all who delight in them. Splendid and majestic is His work, And His righteousness endures forever.
Psalm 111:2-3

iii
ACKNOWLEDGEMENTS
Knowledge cannot be effectively pursued or ascertained by individuals operating in a
relational vacuum. Rather, it is a communal process that is profoundly impacted by those
around us. Thus, this research has been molded and influenced by many individuals and
organizations. It is here that I attempt to recognize their contribution and express my
deepest gratitude.
The singular individual who has had the most profound impact on this work is my
advisor, Professor John Sullivan. He not only provided extensive insight and wisdom for
this project, but helped in many other ways. He extended freedom for me to pursue the
projects that most interested me. Prof. Sullivan sacrificed some of his funding to provide
equipment when I needed it most, and to attend many professional conferences. He has
invested substantial time – over 20% of his career – in mentoring me and helping me
grow as a researcher and academic. The most memorable times are the hundreds of miles
we have run together in New York, Chicago, Indianapolis, Louisville, and around the
cornfields of Tippecanoe County. I am deeply grateful for his influence on this work and
my life.
This work was funded by the NASA Graduate Student Researchers Program
Fellowship. I spent several summers at NASA Glenn Research Center through this
program and the NASA Lewis’ Educational and Research Collaborative Internship
Program. Through my collaborations with Tim Bencic, we conceived ideas together for
several tests related to pressure-sensitive paint.
In summer of 2004 I visited Prof. Keisuke Asai’s laboratory at the Tohoku University
Department of Aeronautics and Space Engineering in Sendai, Japan. This visit was
funded through the 21st Century COE of Flow Dynamics International Internship
Program. While in Japan I had the pleasure to work with Prof. Asai, Dr. Hiroki Nagai,

iv
Shunsuke Ohmi, and Toshiyuki Kojima. It was there that I learned more about
international collaborations. My Japanese colleagues were very gracious hosts.
Prof. Ganesh Raman of the Illinois Institute of Technology and Dr. Surya Raghu of
Advanced Fluidics Corporation were key collaborators throughout my work with the
fluidic oscillators. Many of the ideas presented in this dissertation were conceived in
conversations with them. Dr. Raghu is the inventor of the feedback-free fluidic
oscillator, which is one of the cornerstones of this work. He also helped conceive the
piezo-fluidic oscillator presented in chapter five, and invited me to help him develop the
dual-frequency actuator presented in chapter four. Prof. Ganesh Raman suggested the
micro fluidic oscillator tests presented in chapter three. He also graciously hosted me at
his laboratory for two days in June 2005 for cavity tone suppression tests. Praveen
Panickar, one of his Ph.D. students, selflessly provided his time to work with me on the
experimental setup and data acquisition. The fruits of this test are presented in chapter
six.
Prof. Narayanan Komerath was my advisor while I was an undergraduate at Georgia
Tech. He provided me the opportunity to work in his research group when I was a
freshman, and I credit this opportunity with opening my eyes to the world of research.
More recently, I worked with Prof. Komerath and Sam Wanis on a collaborative research
project on PSP development for acoustics. To me this work was the epitome of a
successful collaboration: we accomplished much more together than we would have been
able to achieve individually. It was an excellent fusion of my experience in pressure-
sensitive paint and their expertise in acoustics. The fruit of this collaboration is presented
in chapter eight.
I would like to thank my committee members for their insightful comments and
advice for this dissertation: Tim Bencic, Steven Collicott, Sanford Fleeter, Anastasios
Lyrintzis, John Sullivan, and Marc Williams. Prof. Gregory Blaisdell also provided
useful insight into the fluid dynamics of axis-switching, including a hands-on
demonstration in the Grissom faculty lounge.
The 14-bit CCD camera used for many of these tests was loaned by the Boeing
Company, thanks to Mike Benne. Jim Crafton of International Scientific Solutions, Inc.

v
loaned an LED array used for some of these tests. I appreciate their generosity in sharing
their research equipment.
The Aerospace Sciences Lab machine shop – comprised of Madeline Chadwell, Jerry
Hahn, Robin Snodgrass, and Jim Younts – fielded my many fabrication questions and
patiently helped me manufacture the fluidic oscillators. Joan Jackson of the AAE
business office would often save the day by placing orders for me on her own personal
time and phone bill.
Colleagues at ASL provided moral support, friendship, and stimulating technical
discussions. In particular, I would like to thank Matt Borg, Budi Chandra, Matt
Churchfield, Ebenezer Gnanamanickam, Chih-Yung Huang, Leon Walters, Tyler
Robarge, Shann Rufer, Craig Skoch, and Erick Swanson. Discussions with friends such
as Andrew Brightman, Corey Miller, and Kent Miller have had a profound impact on
how I approach aerospace engineering. They have encouraged me as I follow Christ in
learning how to integrate faith with my vocation. I have benefited greatly, and in ways
that I may never know, from the prayers of friends and family. In particular, I would like
to thank Hyukbong Kwon, Bob Manning, Howoong Namgoong, and the other friends
who prayed with us for each other and our department.
I would like to thank my parents, Winborn and Marilyn Gregory, for their continued
support throughout the years. They have encouraged me in all of my endeavors, which is
a tremendous blessing. I am thankful that they have been very free in allowing me to
pursue the unique calling of my life. My mother’s faith-filled prenatal prayers of 1
Samuel 1, and subsequent dedication of my life, are yielding fruit today.
Finally, I wish to thank the One for whom I work. Acknowledgements of Divine
assistance in a scholarly work may be viewed by some with cynicism. However, I find
that God’s grace is relevant, tangible, substantial, and freely available for all who desire
it. His grace is always humbling because it is never deserved. This work is what it is,
and I am who I am, because Jesus died to set me free.

vi
TABLE OF CONTENTS
Page
LIST OF TABLES.............................................................................................................. x
LIST OF FIGURES ........................................................................................................... xi
ABSTRACT..................................................................................................................... xix
INTRODUCTION .............................................................................................................. 1
PART ONE: FLUIDIC OSCILLATORS ........................................................................... 6
CHAPTER 1: FLUID DYNAMICS OF THE FEEDBACK-FREE FLUIDIC OSCILLATOR.................................................................................................................... 7
1.1 Fluidic Oscillator Geometry ..................................................................................... 7 1.2 Schlieren Flow Visualization.................................................................................... 9 1.3 PSP Experimental Setup ......................................................................................... 10 1.4 Pressure-Sensitive Paint Visualization ................................................................... 12
1.4.1 High Flow Rates .............................................................................................. 12 1.4.1.1 Equal Supply Pressures............................................................................. 12 1.4.1.2 Unequal Supply Pressures......................................................................... 15
1.4.2 Low Flow Rates ............................................................................................... 15 1.4.2.1 Internal Visualization................................................................................ 15 1.4.2.2 External Visualization............................................................................... 16
1.5 Water Visualization ................................................................................................ 18 1.5.1 High Flow Rates .............................................................................................. 18 1.5.2 Low Flow Rates ............................................................................................... 19
1.6 Summary ................................................................................................................. 20
CHAPTER 2: FREQUENCY STUDIES AND SCALING EFFECTS ............................ 21
2.1 Experimental Setup and Data Reduction ................................................................ 21 2.2 Fluidic Oscillator Operating Map ........................................................................... 22 2.3 Scaling Studies........................................................................................................ 25 2.4 Aspect Ratio Studies ............................................................................................... 30

vii
Page
2.5 Inlet Geometry Effects............................................................................................ 32 2.6 Supply Gas Effects.................................................................................................. 33 2.7 Unequal Inlet Flow Rates........................................................................................ 37 2.8 Summary ................................................................................................................. 38
CHAPTER 3: CHARACTERIZATION OF THE MICRO FLUIDIC OSCILLATOR ... 39
3.1 Introduction............................................................................................................. 39 3.2 Experimental Setup................................................................................................. 40
3.2.1 Device Fabrication ........................................................................................... 40 3.2.2 Instrumentation for Frequency Evaluation ...................................................... 40 3.2.3 Pressure-Sensitive Paint................................................................................... 40
3.3 Results and Discussion ........................................................................................... 42 3.3.1 Water Visualization ......................................................................................... 42 3.3.2 Frequency vs. Flow Rate Evaluation ............................................................... 43 3.3.3 Pressure-Sensitive Paint Results ...................................................................... 46
3.4 Summary ................................................................................................................. 55
CHAPTER 4: MODULATED JET BURSTS WITH A PULSED FLUIDIC OSCILLATOR.................................................................................................................. 56
4.1 Introduction............................................................................................................. 56 4.2 Experimental Setup................................................................................................. 57 4.3 Results..................................................................................................................... 58
4.3.1 Carrier Frequency Variation ............................................................................ 58 4.3.2 Pressure Variation............................................................................................ 60 4.3.3 Duty Cycle Variation ....................................................................................... 63
4.4 Summary ................................................................................................................. 65
CHAPTER 5: DEVELOPMENT OF THE PIEZO-FLUIDIC OSCILLATOR ............... 66
5.1 Introduction............................................................................................................. 66 5.2 Piezo-Fluidic Oscillator Design Concepts .............................................................. 69 5.3 Measurement Techniques ....................................................................................... 72 5.4 Results and Discussion ........................................................................................... 74
5.4.1 Flow Visualization ........................................................................................... 75 5.4.2 Hot Film Probe Data ........................................................................................ 76
5.4.2.1 Velocity Time Histories............................................................................ 76 5.4.2.2 Frequency Bandwidth ............................................................................... 80
5.5 Summary ................................................................................................................. 86
CHAPTER 6: CAVITY TONE SUPPRESSION WITH A FLUIDIC OSCILLATOR ... 87
6.1 Introduction............................................................................................................. 87 6.2 Experimental Setup................................................................................................. 90 6.3 Results..................................................................................................................... 91

viii
Page
6.4 Summary ................................................................................................................. 97
PART TWO: PRESSURE-SENSITIVE PAINT.............................................................. 98
CHAPTER 7: THE EFFECT OF QUENCHING KINETICS ON THE UNSTEADY RESPONSE OF PSP......................................................................................................... 99
7.1 Nomenclature........................................................................................................ 100 7.2 Introduction........................................................................................................... 101 7.3 Background........................................................................................................... 103 7.4 Stern-Volmer Quenching Model........................................................................... 105
7.4.1 Model Development....................................................................................... 105 7.4.2 Intensity Response ......................................................................................... 111 7.4.3 Pressure Response.......................................................................................... 112 7.4.4 Frequency Response ...................................................................................... 116 7.4.5 Adsorption Effects ......................................................................................... 121
7.5 Experimental Results ............................................................................................ 122 7.5.1 Fluidic Oscillator ........................................................................................... 123 7.5.2 Results............................................................................................................ 127
7.6 Summary ............................................................................................................... 133
CHAPTER 8: PRESSURE-SENSITIVE PAINT AS A DISTRIBUTED OPTICAL MICROPHONE ARRAY ............................................................................................... 134
8.1 Introduction........................................................................................................... 134 8.2 Paint Development................................................................................................ 138
8.2.1 Characteristics of Pressure-Sensitive Paint.................................................... 138 8.2.2 Morphology.................................................................................................... 141 8.2.3 Dynamic Response Characteristics................................................................ 143 8.2.4 Sensitivity ...................................................................................................... 145
8.3 Experimental Setup............................................................................................... 147 8.4 Data Reduction...................................................................................................... 149
8.4.1 Shot Noise...................................................................................................... 149 8.4.2 Temperature Effects....................................................................................... 149 8.4.3 Image Misalignment ...................................................................................... 150 8.4.4 Data Reduction Procedure ............................................................................. 151
8.5 Results................................................................................................................... 151 8.5.1 Linear Modal Theory ..................................................................................... 151 8.5.2 Pressure-Sensitive Paint Results .................................................................... 155 8.5.3 Discussion ...................................................................................................... 161
8.6 Summary ............................................................................................................... 164
CHAPTER 9: CHARACTERIZATION OF THE HARTMANN OSCILLATOR........ 166
9.1 Introduction........................................................................................................... 166

ix
Page
9.2 Experimental Setup............................................................................................... 170 9.2.1 Hartmann Tube .............................................................................................. 170 9.2.2 Pressure-Sensitive Paint................................................................................. 171 9.2.3 Schlieren Imaging .......................................................................................... 173
9.3 PSP Data Reduction.............................................................................................. 173 9.4 Results and Discussion ......................................................................................... 174
9.4.1 Flat-Face 3/16” Cavity................................................................................... 174 9.4.2 Flat-Face 1/4” Cavity..................................................................................... 176 9.4.3 Angled-Face 1/4” Cavity ............................................................................... 185
9.5 Summary ............................................................................................................... 192
CHAPTER 10: CONCLUSIONS AND RECOMMENDATIONS................................ 193
10.1 Conclusions......................................................................................................... 193 10.2 Recommendations............................................................................................... 196
LIST OF REFERENCES................................................................................................ 197
APPENDICES
Appendix A: Flow Visualization with Laser-Induced Thermal Tufts ........................ 213 Nomenclature.......................................................................................................... 213 Introduction and Background ................................................................................. 214 Experimental Setup................................................................................................. 216 Results and Discussion ........................................................................................... 218 Selection of Substrate Material............................................................................... 219 Thermal Tuft Response to Velocity Variation........................................................ 222 Thermal Tuft Response to Laser Power Variation ................................................. 223 Experimental Observations..................................................................................... 225 Natural Convection ................................................................................................. 225 Location of Reattachment ....................................................................................... 226 Computational Model ............................................................................................. 227 Physical Phenomena ............................................................................................... 227 Icepak / FLUENT .................................................................................................... 228 Temperature-Sensitive Paint Results ...................................................................... 229 A New Concept: Thermally Ablative Tufts............................................................ 231 Summary ................................................................................................................. 232
Appendix B: PSP Measurements with a High-Speed Camera.................................... 233
VITA............................................................................................................................... 237

x
LIST OF TABLES
Table Page
Table 2.1: Oscillator dimensions for scaling studies. ...................................................... 26
Table 2.2: Oscillator dimensions for aspect ratio studies. ............................................... 31
Table 3.1: Summary of linear dependence of oscillation frequency on flow rate. .......... 44
Table 5.1: Summary of step response times..................................................................... 79
Table 6.1: Suppression results for Actuator 1 at Mach 0.5.............................................. 92
Table 6.2: Suppression results for Actuator 1 at Mach 0.7.............................................. 92
Table 6.3: Suppression results for Actuator 1 at Mach 0.9.............................................. 93
Table 6.4: Suppression results for Actuator 2 at Mach 0.5.............................................. 93
Table 6.5: Suppression results for Actuator 2 at Mach 0.7.............................................. 93
Table 6.6: Suppression results for Actuator 3 at Mach 0.5.............................................. 93
Table 6.7: Suppression results for Actuator 3 at Mach 0.7.............................................. 93
Table 7.1: Frequency response characteristics............................................................... 118
Table 7.2: Summary of dynamic calibration methods. .................................................. 122
Table 8.1: Theoretical minimum-detectable-level of pressure-sensitive paint. ............. 147
Appendix Table
Table A.1: Liquid crystal sheet temperature range. .........................................................218
Table A.2: Summary of substrate material thermal properties. .......................................220
Table A.3: Thermal properties of backing materials. ......................................................228

xi
LIST OF FIGURES
Figure Page
Figure 1.1: Photograph of a typical fluidic oscillator........................................................8
Figure 1.2: X-ray images showing internal geometry of fluidic oscillator. ......................8
Figure 1.3: Scale drawing of a typical fluidic oscillator internal geometry. .....................9
Figure 1.4: Schlieren images of the fluidic oscillator flowfield at (a) 0° phase and (b) 180° phase. ..............................................................................................10
Figure 1.5: Experimental setup for the pressure-sensitive paint measurements. ............11
Figure 1.6: Visualization of jet mixing at several time steps within the 400-μs period. ...........................................................................................................13
Figure 1.7: Internal fluid dynamics of the fluidic oscillator............................................13
Figure 1.8: (a) Visualization of jet mixing with equal supply pressures. (b) Cross-sections of the data along a line one jet-diameter downstream of the exit. ..14
Figure 1.9: Visualization of jet mixing for unequal flow inputs at 5.25 kHz. Left inlet: nitrogen at 3.61 psig. Right inlet: oxygen at 3.81 psig. ......................15
Figure 1.10: Internal jet pattern at low flow rates. ............................................................16
Figure 1.11: External flowfield at low flow rates..............................................................17
Figure 1.12: Water visualization of the fluidic oscillator at a supply pressure of 1.8 psi..................................................................................................................18
Figure 1.13: Water visualization of fluidic oscillator at low flow rates (Pwater = 0.8 psi).................................................................................................................20
Figure 2.1: Frequency spectra over a range of supply pressures.....................................22
Figure 2.2: Power spectra at three representative pressures. The three spectra correspond to vertical slices of Figure 2.1, marked by arrows. ....................23
Figure 2.3: High-frequency mode-hopping at very low supply pressures. .....................24
Figure 2.4: Oscillator geometry for scaling studies.........................................................26
Figure 2.5: Frequency map for the response of design three. .........................................27
Figure 2.6: Low flow rate frequency map for design three.............................................27

xii
Figure Page
Figure 2.7: Frequency response of the primary oscillation frequency for design three...............................................................................................................29
Figure 2.8: Frequency response of all five scaled designs. .............................................29
Figure 2.9: Reduced frequency response of all five scaled designs. ...............................30
Figure 2.10: Effect of aspect ratio on the oscillation frequency........................................31
Figure 2.11: Effect of aspect ratio on reduced frequency. ................................................32
Figure 2.12: Oscillator geometries for inlet variation study: (a) concave, (b) straight, (c) convex......................................................................................................34
Figure 2.13: Effect of inlet geometry on the frequency response of design three.............35
Figure 2.14: Effect of inlet geometry on the reduced frequency response of design three...............................................................................................................35
Figure 2.15: Frequency response of design three to air and argon gases. .........................36
Figure 2.16: Reduced frequency response of design three to air and argon gases. ...........36
Figure 2.17: Response of the fluidic oscillator to unequal flow rates on the inlets. .........37
Figure 3.1: Experimental setup for the pressure-sensitive paint measurements. ............41
Figure 3.2: Water visualization of micro fluidic oscillator flowfield, (a) instantaneous (1/60 s with flash), and (b) time-averaged (1/2 s, no flash). ..43
Figure 3.3: Frequency and flow rate evaluation, oscillator operating with air................44
Figure 3.4: Frequency response of the fluidic oscillator supplied with air. ....................46
Figure 3.5: Power spectrum of Kulite signal, 9.4 kHz oscillations. ................................48
Figure 3.6: Phase-averaged pressure-sensitive paint data for the micro fluidic oscillator with nitrogen gas at 9.4 kHz, flow rate of 554 mL/min (~0.67 g/min), supply pressure of 6.69 kPa, and 20-μs delay step. ........................49
Figure 3.7: Cross-sectional data taken from the PSP results at 9.4 kHz, at a location 500 μm downstream of the nozzle exit. ........................................................50
Figure 3.8: RMS Intensity plot from the phase-averaged time history at 9.4 kHz..........50
Figure 3.9: Power spectrum of Kulite signal, 21.0 kHz oscillations...............................52
Figure 3.10: Phase-averaged pressure-sensitive paint data for the micro fluidic oscillator with nitrogen gas at 21.0 kHz, flow rate of 1168 mL/min (~1.91 g/min), supply pressure of 44.47 kPa, and 18-μs delay step. ............53
Figure 3.11: Cross-sectional data taken from the PSP results at 21.0 kHz, at a location 500 μm downstream of the nozzle exit. ..........................................54
Figure 3.12: RMS Intensity plot from the phase-averaged time history at 21.0 kHz........54

xiii
Figure Page
Figure 4.1: Experimental setup for characterization of the pulsed-fluidic oscillator. .....57
Figure 4.2: Variation of carrier frequency from 10 Hz to 200 Hz, with a constant high-frequency of 3 kHz and a supply pressure of 6 kPa. ............................59
Figure 4.3: Zoomed-in portion of Figure 4.2. .................................................................59
Figure 4.4: Power spectra of the time histories shown in Figure 4.2. .............................60
Figure 4.5: Input pressure variation, measured by a Kulite pressure transducer between the solenoid valve and the fluidic oscillator, with a constant carrier frequency at 50 Hz.............................................................................61
Figure 4.6: Response of the dual-frequency actuator to changes in pressure, with a constant carrier frequency of 50 Hz..............................................................61
Figure 4.7: Zoomed-in portion of Figure 4.6. The high-frequency component increases in frequency and amplitude as the pressure is increased...............62
Figure 4.8: Power spectra of the time histories shown in Figure 4.6. .............................62
Figure 4.9: Input duty-cycle variation, measured by a Kulite pressure transducer between the solenoid valve and the fluidic oscillator. ..................................63
Figure 4.10: Response of the actuator to variation in duty cycle. Pressure remains constant and the carrier frequency remains constant at 25 Hz......................64
Figure 4.11: Zoomed-in portion of Figure 4.10. ...............................................................64
Figure 4.12: Power spectra of the time histories in Figure 4.10........................................65
Figure 5.1: The principle of wall attachment in a fluidic device, known as the Coanda Effect................................................................................................68
Figure 5.2: Scale diagram of the first design. The piezoelectric bender is positioned in the diffuser, pointing upstream into the flow............................................71
Figure 5.3: Photograph of the first design, with the piezo device removed for clarity. ..71
Figure 5.4: Scale diagram of the second design. The bender is oriented with the tip pointing downstream from the throat............................................................72
Figure 5.5: Photograph of the second design, with the piezo bender installed. ..............72
Figure 5.6: Experimental setup for the pressure-sensitive paint and hot film probe instrumentation. ............................................................................................74
Figure 5.7: Schlieren images of the bi-stable operation of the oscillator, with hydrogen gas used for visualization..............................................................75
Figure 5.8: Series of PSP images with successive delays of 1 ms at an oscillation frequency of 50 Hz. Flow is from left-to-right, and the piezo bender is on the right. ...................................................................................................77

xiv
Figure Page
Figure 5.9: Time history of the oscillator outputs simultaneously measured by hot film probes. (a) 10 Hz, (b) 200 Hz. Pressure ratio is 1.69. .........................78
Figure 5.10: Step response of the piezo-fluidic oscillator.................................................79
Figure 5.11: High frequency oscillations at 1.0 kHz and a pressure ratio of 1.14. ...........81
Figure 5.12: Response of the piezo-fluidic oscillator at sonic nozzle conditions. The pressure ratio is 2.15 and the oscillation frequency is 5 Hz..........................81
Figure 5.13: Frequency maps of the piezo-fluidic oscillator performance at a supply pressure ratio of 1.14.....................................................................................82
Figure 5.14: (a) Magnitude and (b) phase plots of the piezo-fluidic oscillator response with the bender facing upstream. ..................................................................84
Figure 5.15: (a) Magnitude and (b) phase plots of the piezo-fluidic oscillator response with the bender facing downstream (with the flow). ....................................85
Figure 6.1: Geometry of actuator 1, a wide-angle fluidic oscillator. ..............................89
Figure 6.2: Geometry of actuator 2, a narrow-angle fluidic oscillator. ...........................89
Figure 6.3: Geometry of actuator 3, a converging nozzle for steady blowing. ...............89
Figure 6.4: Jet-cavity facility at the Illinois Institute of Technology. .............................90
Figure 6.5: Suppression results for Actuator 1 (wide fan angle) at Mach 0.5.................94
Figure 6.6: Suppression results for Actuator 1 (wide fan angle) at Mach 0.7.................94
Figure 6.7: Suppression results for Actuator 1 (wide fan angle) at Mach 0.9.................95
Figure 6.8: Suppression results for Actuator 2 (narrow fan angle) at Mach 0.5. ............95
Figure 6.9: Suppression results for Actuator 2 (narrow fan angle) at Mach 0.7. ............96
Figure 6.10: Suppression results for Actuator 3 (steady blowing) at Mach 0.5. ...............96
Figure 6.11: Suppression results for Actuator 3 (steady blowing) at Mach 0.7. ...............97
Figure 7.1: Diagram of modeled PSP geometry............................................................106
Figure 7.2: Gas diffusion (a) into and (b) out of the paint layer. ..................................108
Figure 7.3: Typical calibration curves for various pressure-sensitive paint formulations. ...............................................................................................110
Figure 7.4: PSP calibration data plotted to show the nonlinear Stern-Volmer intensity response........................................................................................110
Figure 7.5: Integrated intensity response to step-changes in pressure, compared to oxygen concentration; A=0.9, B=0.1, γ=1.0. ..............................................112
Figure 7.6: PSP indicated pressure step-response, variation from atmosphere to vacuum; A=0.9, B=0.1, γ=1.0....................................................................114

xv
Figure Page
Figure 7.7: PSP indicated pressure step-response, variation with γ; A=0.9, B=0.1, γ=1.0 or 0.1. ................................................................................................114
Figure 7.8: PSP indicated pressure step-response, variation with pressure jump magnitude; A=0.9, B=0.1, γ=1.0, ΔP=6.9 kPa............................................115
Figure 7.9: PSP indicated pressure step-response, variation from 101 kPa to 202 kPa; A=0.9, B=0.1, γ=1.0. ..........................................................................116
Figure 7.10: Bode plots of (a) magnitude and (b) phase for the frequency response of Fast FIB PSP. ..............................................................................................119
Figure 7.11: Bode plots of (a) magnitude and (b) phase for the frequency response of Polymer/Ceramic PSP.................................................................................120
Figure 7.12: Hot-film probe characterization of fluidic oscillator flow with various gases............................................................................................................124
Figure 7.13: Experimental setup for fluidic oscillator dynamic calibrations. .................125
Figure 7.14: Polymer/ceramic PSP response to the argon jet at a) 0 μs and b) 314 μs (180° delay), at an oscillation frequency of 1.59 kHz. ...............................128
Figure 7.15: Polymer/ceramic PSP response to the oxygen jet at a) 0 μs and b) 314 μs (180° delay), at an oscillation frequency of 1.59 kHz. ...............................129
Figure 7.16: Polymer/ceramic PSP response to argon, nitrogen, and oxygen jets from the fluidic oscillator at 1.59 kHz.................................................................130
Figure 7.17: Fast FIB response to argon, nitrogen, and oxygen jets from the fluidic oscillator at 1.59 kHz. .................................................................................131
Figure 7.18: Comparison of diffusion model with experimental results for nitrogen and oxygen jets. ..........................................................................................132
Figure 8.1: Rotor-stator interaction in a turbofan engine. .............................................135
Figure 8.2: Morphology of the polymer/ceramic pressure-sensitive paint formulation..................................................................................................142
Figure 8.3: Dynamic calibration of polymer/ceramic pressure-sensitive paint with a fluidic oscillator. .........................................................................................144
Figure 8.4: Typical calibration of polymer/ceramic pressure-sensitive paint over a range from vacuum to two atmospheres. ....................................................145
Figure 8.5: Experimental setup for acoustic PSP measurements. .................................148
Figure 8.6: Analytical solution for the (1,1,0) mode shape in a rectangular cavity, ω = 1298 Hz. Pressure is expressed in (a) Pascals and (b) pressure ratio. 154
Figure 8.7: Pressure-sensitive paint data for the (1,1,0) mode shape at 145.4 dB and ω = 1286 Hz. Pressure is expressed in (a) Pascals and (b) pressure ratio. 156
xvi
Figure Page
Figure 8.8: Time-sequence of PSP data for the (1,1,0) mode shape in phase steps of 30° (64.8 μs) from (a) 0° to (f) 150°. ..........................................................157
Figure 8.9: A continuation of the time-sequence of PSP data for the (1,1,0) mode shape in phase steps of 30° (64.8 μs) from (a) 180° to (f) 330°. ................158
Figure 8.10: Pressure time-history comparison between pressure-sensitive paint, Kulite pressure transducer measurements, and linear theory......................159
Figure 8.11: Vertical cross-section of the pressure-sensitive paint data at x/Lx = 0 at twelve time steps equally spaced throughout the period. ...........................160
Figure 8.12: RMS pressure data (Pa) as measured by PSP for the (1,1,0) mode shape..160
Figure 8.13: Acoustic box image; no image averaging or spatial filtering. ....................162
Figure 8.14: Average of 100 speaker-on images divided by average of 100 speaker-off images, no filtering................................................................................163
Figure 8.15: 100-image average with spatial filtering using a 3-pixel radius moving window........................................................................................................164
Figure 9.1: Conceptual drawing showing the operating mechanism of the Hartmann tube (a) Filling of resonance cavity and (b) cavity discharge (after Brocher et al.151). ........................................................................................167
Figure 9.2: Schlieren image of underexpanded open jet, showing the shock-cell structure.......................................................................................................168
Figure 9.3: Photograph of two resonance cavities.........................................................170
Figure 9.4: Geometries for the (a) flat face and (b) 45° angled face resonance cavities. All dimensions are in inches, and the cavity shapes are made from 1” thick acrylic. ..................................................................................171
Figure 9.5: Diagram of experimental setup for PSP measurements..............................172
Figure 9.6: PSP image sequence depicting shock oscillation, with 10 μs time steps between each image. ...................................................................................175
Figure 9.7: PSP image sequence showing shock wave oscillation for the flat resonance cavity with 24 μs time steps.......................................................177
Figure 9.8: Schlieren image sequence showing shock wave oscillation for the flat resonance cavity with 16 μs time steps.......................................................178
Figure 9.9: PSP image sequence showing acoustic wave propagation for the flat resonance cavity with 16 μs time steps.......................................................180
Figure 9.10: Schlieren image sequence showing acoustic wave propagation for the flat resonance cavity with 16 μs time steps. ...............................................181

xvii
Figure Page
Figure 9.11: Reconstructed time history from phase-averaged PSP data for the flat resonance cavity..........................................................................................183
Figure 9.12: RMS pressure levels (psi) in the near field of the shock oscillation for the flat resonance cavity..............................................................................184
Figure 9.13: Sound pressure levels (dB, ref. 20 μPa) for the flat resonance cavity. .......184
Figure 9.14: PSP image sequence showing shock wave oscillation for the angled resonance cavity with 20 μs time steps.......................................................187
Figure 9.15: Schlieren image sequence showing shock wave oscillation for the angled resonance cavity with 16 μs time steps.......................................................188
Figure 9.16: PSP image sequence showing acoustic wave propagation for the angled resonance cavity with 12 μs time steps.......................................................189
Figure 9.17: Schlieren image sequence showing acoustic wave propagation for the angled resonance cavity with 16 μs time steps. ..........................................190
Figure 9.18: RMS pressure values (psi) in the near field of the shock oscillation for the angled resonance cavity. .......................................................................191
Figure 9.19: Sound-pressure levels (dB, ref. 20 μPa) for the angled resonance cavity. .192
Appendix Figure
Figure A.1: Typical example of a laser-induced thermal tuft, indicating flow from left to right. .................................................................................................214
Figure A.2: Diagram of the thermal tuft concept. ..........................................................215
Figure A.3: Diagram of the thermal tuft experimental setup. ........................................217
Figure A.4: Images of thermal tufts generated with various insulating substrate layers...........................................................................................................221
Figure A.5: Definition of length (l) and width (w) dimensions on a thermal tuft. .........222
Figure A.6: Response of tuft geometry to variation in Reynolds number. Velocity varies from 10 to 60 m/s and laser power is 277 mW. ...............................224
Figure A.7: Response of tuft geometry to variation in laser power. Velocity is held constant at 4.9 m/s. .....................................................................................225
Figure A.8: Thermal tuft at zero flow velocity, demonstrating the effect of natural convection...................................................................................................226
Figure A.9: Thermal tuft at a flow reattachment point, indicating flow in opposite directions.....................................................................................................227
Figure A.10: Numerical simulation of a thermal tuft with thermochromic liquid crystals and a balsa wood substrate with flow from left to right. ...............229
Figure A.11: Temperature-sensitive paint results. ...........................................................230

xviii
Appendix Figure Page
Figure A.12: Thermally ablative tufts with temperature-sensitive paint with impinging flow from left to right. ................................................................................232
Figure B.1: Unfiltered PSP data from the high-speed camera.......................................234
Figure B.2: Filtered PSP data from the high-speed camera, with a disk radius of 5 pixels...........................................................................................................235
Figure B.3: Variation in the camera gain.......................................................................235
Figure B.4: Time sequence of PSP data at 125 μs intervals. .........................................236

xix
ABSTRACT
Gregory, James Winborn. Ph.D., Purdue University, August, 2005. Development of Fluidic Oscillators as Flow Control Actuators. Major Professor: John P. Sullivan.
This work is comprised of two key accomplishments: the study and design of fluidic
oscillators for flow control applications, and the development and application of porous
pressure-sensitive paint (PSP) for unsteady flowfields. PSP development was a necessary
prerequisite for characterizing the unsteady fluid dynamics of the fluidic oscillators.
Development work on the fluidic oscillator commences with a study on the internal fluid
dynamics of the feedback-free class of oscillators. This study demonstrates that the
collision of two jets within a mixing chamber forms an oscillating shear layer driven by
counter-rotating vortices. A micro-scale version of this type of oscillator is also
characterized with PSP measurements and frequency surveys. Subsequently, this high-
frequency oscillator (~ 5 kHz) is coupled with a low-frequency solenoid valve to create
dual-frequency injection that is useful in flow control applications. A new hybrid
actuator is developed that merges piezoelectric and fluidic technology. This piezo-fluidic
oscillator successfully decouples the oscillation frequency from the supply pressure,
thereby enabling closed-loop flow control actuation. Fluidic oscillators are then applied
to a practical flow control application for cavity tone suppression. The fluidic oscillators
are able to suppress the tone by 17.0 dB, while steady blowing at the same mass flow rate
offers only 1.6-dB suppression. Work with pressure-sensitive paint involved
development of a model for the quenching kinetics of the paint. Two fast-responding
paint formulations, Polymer/ceramic and Fast FIB, are evaluated experimentally and
compared to the model predictions. Both the model and experiments demonstrate that a
paint layer will respond faster to a decrease in pressure than an increase of the same
magnitude, and that the polymer/ceramic paint has a flat frequency response of at least

xx
1.59 kHz. Furthermore, the excellent response characteristics of porous PSP are
highlighted by applying the paint to various flowfields. The polymer/ceramic
formulation is used to record the 12-kHz oscillating shock wave and propagating acoustic
waves generated by a Hartmann oscillator. Polymer/ceramic PSP is also used to measure
the acoustic mode shapes in a rectangular resonance cavity driven by a speaker at 145 dB.
These results compare favorably to the analytical solution for the same geometry.

1
INTRODUCTION
Flow control actuators are devices that are used to enact large-scale changes in a
flowfield with a relatively small control input. Often these changes are focused on
improving the performance of a flight vehicle – by delaying stall, reducing drag,
enhancing lift, abating noise, reducing emissions, etc. In many flow control situations,
unsteady actuation is required for optimal performance. Unsteady actuators are
particularly beneficial in closed-loop control applications when the unsteady actuation
can be controlled. If the unsteady actuation is synchronized with the characteristic time
scales of the flowfield, then the actuator power requirements can often be minimized.
Common flow control actuators include synthetic jets,1 piezoelectric benders,2,3 powered
resonance tubes (also known as Hartmann whistles),4-6 plasma actuators,7-11 pulsed jets,12-
14 and steady blowing15 or suction.16 These devices and concepts all have inherent
strengths and some limitations. Thus, the selection of a flow control actuator often is
driven by the requirements of the application. A new class of flow control actuators is
introduced in this work – the fluidic oscillator. This particular type of actuator has the
advantages of high frequency bandwidth, low mass flow requirements, and simplicity.
The fluidic oscillator is a fascinating device that produces an oscillating jet when
supplied with a pressurized fluid. The oscillations are typically on the order of several
kilohertz, and can range up to over 20 kHz for small devices. The internal geometry of
the device may be tailored to produce specific jet wave patterns, such as sinusoidal,
sawtooth, or even square waveforms.17 Fluidic oscillators were originally developed in
the 1960’s, evolving out of research in fluid amplifiers. The fluidic oscillator has its
roots based in the field of fluid logic, as detailed by Morris,18 and Kirshner and Katz.19 A
comprehensive overview of the fluid amplifier technology and an extensive bibliography
may be found in the NASA contractor reports edited by Raber and Shinn.20,21 The fluidic
2
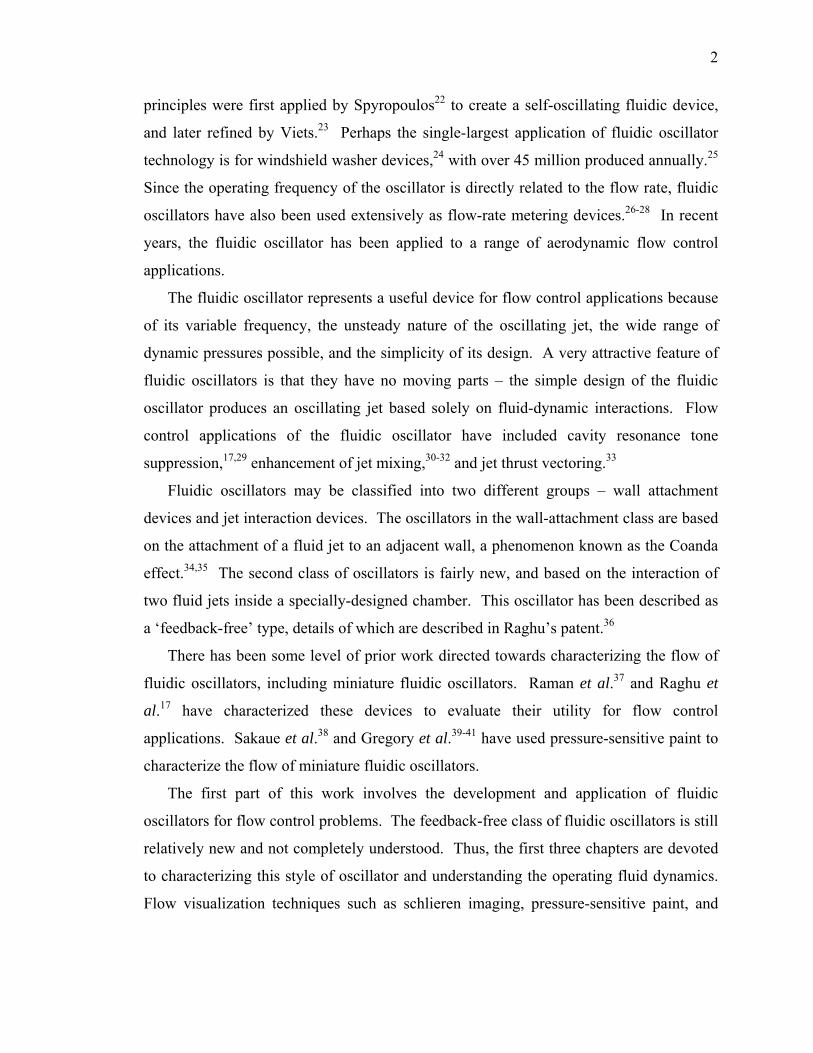
principles were first applied by Spyropoulos22 to create a self-oscillating fluidic device,
and later refined by Viets.23 Perhaps the single-largest application of fluidic oscillator
technology is for windshield washer devices,24 with over 45 million produced annually.25
Since the operating frequency of the oscillator is directly related to the flow rate, fluidic
oscillators have also been used extensively as flow-rate metering devices.26-28 In recent
years, the fluidic oscillator has been applied to a range of aerodynamic flow control
applications.
The fluidic oscillator represents a useful device for flow control applications because
of its variable frequency, the unsteady nature of the oscillating jet, the wide range of
dynamic pressures possible, and the simplicity of its design. A very attractive feature of
fluidic oscillators is that they have no moving parts – the simple design of the fluidic
oscillator produces an oscillating jet based solely on fluid-dynamic interactions. Flow
control applications of the fluidic oscillator have included cavity resonance tone
suppression,17,29 enhancement of jet mixing,30-32 and jet thrust vectoring.33
Fluidic oscillators may be classified into two different groups – wall attachment
devices and jet interaction devices. The oscillators in the wall-attachment class are based
on the attachment of a fluid jet to an adjacent wall, a phenomenon known as the Coanda
effect.34,35 The second class of oscillators is fairly new, and based on the interaction of
two fluid jets inside a specially-designed chamber. This oscillator has been described as
a ‘feedback-free’ type, details of which are described in Raghu’s patent.36
There has been some level of prior work directed towards characterizing the flow of
fluidic oscillators, including miniature fluidic oscillators. Raman et al.37 and Raghu et
al.17 have characterized these devices to evaluate their utility for flow control
applications. Sakaue et al.38 and Gregory et al.39-41 have used pressure-sensitive paint to
characterize the flow of miniature fluidic oscillators.
The first part of this work involves the development and application of fluidic
oscillators for flow control problems. The feedback-free class of fluidic oscillators is still
relatively new and not completely understood. Thus, the first three chapters are devoted
to characterizing this style of oscillator and understanding the operating fluid dynamics.
Flow visualization techniques such as schlieren imaging, pressure-sensitive paint, and

3
water visualization are used to study the fluid dynamics of the device. Frequency studies
are presented in the next chapter, with the aim of understanding geometrical effects on
the fluidic response of the oscillator. In the third chapter, micro fluidic oscillators based
on the feedback-free design are evaluated for their potential as flow control actuators.
These devices have the advantages of low flow rate requirements, high frequency, and
small size.
Flow control applications often require dual time scales within the actuation signal.
Fluidic oscillators can provide the high-frequency content for mixing, while low-
frequency content can provide high-momentum pulsing. The combination of a fluidic
oscillator with a fast-acting solenoid valve is evaluated as an actuator for flow control
applications in chapter four. One significant limitation of conventional fluidic oscillators
is that the oscillation frequency is coupled to the supply pressure. In flow control
applications, the ideal actuator would have a frequency that could be specified
independently of pressure. Thus, a new fluidic oscillator design is presented, where the
oscillator output is modulated by piezoelectric devices. Chapter five details the
development of the piezo-fluidic actuator, and characterizes the frequency response
limitations of the device. The conclusion of the fluidic oscillator development involves
the demonstration of miniature fluidic oscillators for a practical flow control application.
Here, the fluidic oscillator is applied as a flow control actuator for cavity tone
suppression. The goal of this application is to demonstrate enhanced suppression with a
fluidic oscillator, relative to steady blowing at the same mass flow rate.
Throughout the work of this dissertation, pressure-sensitive paint (PSP) has been used
extensively as an advanced measurement technique. The PSP technique is an essential
technology for characterizing the unsteady fluid dynamics of the fluidic oscillator. State-
of-the-art PSP technology, however, has been limited to steady-state measurements.
Thus, the second part of this dissertation focuses on the development of pressure-
sensitive paint for unsteady applications such as the fluidic oscillator. PSP measures
surface pressure distributions through the processes of luminescence and oxygen
quenching. Typically, PSP is illuminated with an excitation light, which causes
luminophore molecules in the paint to luminesce. In the presence of oxygen in a test gas,

4
the luminescent intensity of the luminophore is reduced by oxygen molecules from the
gas through the process of oxygen quenching. Since the amount of oxygen in air is
proportional to pressure, one can obtain static pressure levels from the change in the
luminescent intensity of PSP, with intensity being inversely proportional to pressure.
Pressure-sensitive paint was initially proposed as a qualitative flow-visualization tool,42
and was subsequently developed as a quantitative technique.43 The accuracy and utility
of PSP has improved such that the technique provides results that rival data obtained
from conventional pressure instrumentation. Comprehensive reviews of the PSP
technique have been published by Bell et al,44 Liu et al,45 and Liu and Sullivan.46
PSP formulations traditionally used for conventional testing typically include a
polymer binder. Conventional polymer-based PSPs are limited in response time,
however. The slow response time characteristic of conventional PSP makes it a limited
tool in the measurement of unsteady flow fields. Therefore, a fast responding paint, such
as porous PSP, is needed for application to unsteady flow.
Porous PSP uses an open, porous matrix as a PSP binder, which improves the oxygen
diffusion process. For conventional PSP, oxygen molecules in a test gas need to
permeate into the binder layer for oxygen quenching. The process of oxygen permeation
in a polymer binder layer produces slow response times for conventional PSP. On the
other hand, the luminophore in porous PSP is opened to the test gas so that the oxygen
molecules are free to interact with the luminophore. The open binder creates a PSP that
responds much more quickly to changes in oxygen concentration, and thus pressure.
There are three main types of porous pressure-sensitive paints currently in use,
depending on the type of binder used. Anodized aluminum PSP (AA-PSP)47-52 uses
anodized aluminum as a porous PSP binder. Thin-layer chromatography PSP (TLC-PSP)
uses a commercial porous silica thin-layer chromatography (TLC) plate as the binder.53
Polymer/ceramic PSP (PC-PSP) uses a porous binder containing hard ceramic particles in
a small amount of polymer.41,54,55 For each of these porous surfaces, the luminophore is
applied directly by dipping or spraying.
Before using pressure-sensitive paint to characterize the unsteady flow field of the
fluidic oscillator, it is important to evaluate the unsteady response of the paint. Previous

5
work by Gregory et al.39-41 demonstrates that porous PSP has a flat frequency response in
excess of 40 kHz. Asai et al.56 have done tests with a shock tube and have shown
response times on the order of 500 kHz with porous PSP.
In chapter seven, the dynamic quenching kinetics of pressure-sensitive paint are
evaluated. Some researchers have observed differences in response characteristics,
depending on the magnitude and direction of the pressure change. This work investigates
this behavior through analytical modeling and experiments. In the subsequent chapter,
pressure-sensitive paint is presented as a tool for acoustic measurements. Here the PSP
was used to resolve acoustic-level pressure fluctuations in a resonance cavity. In the final
chapter, the unsteady flowfield of the Hartmann tube is characterized with pressure-
sensitive paint. Both oscillating shock waves and propagating acoustic waves are
resolved by the paint.

6
PART ONE: FLUIDIC OSCILLATORS

7
CHAPTER 1: FLUID DYNAMICS OF THE FEEDBACK-FREE FLUIDIC OSCILLATOR
The fluidic oscillator evaluated in the current study is comprised of two fluid jets that
interact in an internal mixing chamber, producing the oscillating jet at the exit. The goal
of the work presented in this chapter is to characterize the internal jet mixing
characteristics through flow visualization techniques. Schlieren imaging, porous
pressure-sensitive paint (PSP), and dye-colored water flow are used to visualize the
internal and external fluid dynamics of the oscillator. Porous PSP formulations have
recently been under development for unsteady measurements, as detailed in the second
part of this dissertation. Porous pressure-sensitive paints have been shown to have
frequency responses on the order of 100 kHz, which is more than adequate for visualizing
the fluidic oscillations. In order to provide high-contrast PSP data in these tests, one of
the internal jets of the fluidic oscillator is supplied with oxygen, and the other with
nitrogen. Results indicate that two counter-rotating vortices within the mixing chamber
drive the oscillations. It is also shown that the fluidic oscillator possesses excellent
mixing characteristics.
1.1 Fluidic Oscillator Geometry
Depending on the size of the device, a fluidic oscillator can be formed into a compact
package. An external view of a typical fluidic oscillator is shown in Figure 1.1. This
oscillator is about 1-cm wide, 2-cm long, and a few millimeters thick. The pressurized
fluid supply is provided on the barbed fitting, while the oscillating jet exits from a small,
rectangular orifice measuring about 1-mm wide. The internal geometry of the device is
fairly simple, as shown in the x-ray images in Figure 1.2. These images are for the exact
same oscillator pictured in Figure 1.1. Visible inside the device are two internal orifices
which are fed by the common supply port. Fluid from the internal nozzles exits into a
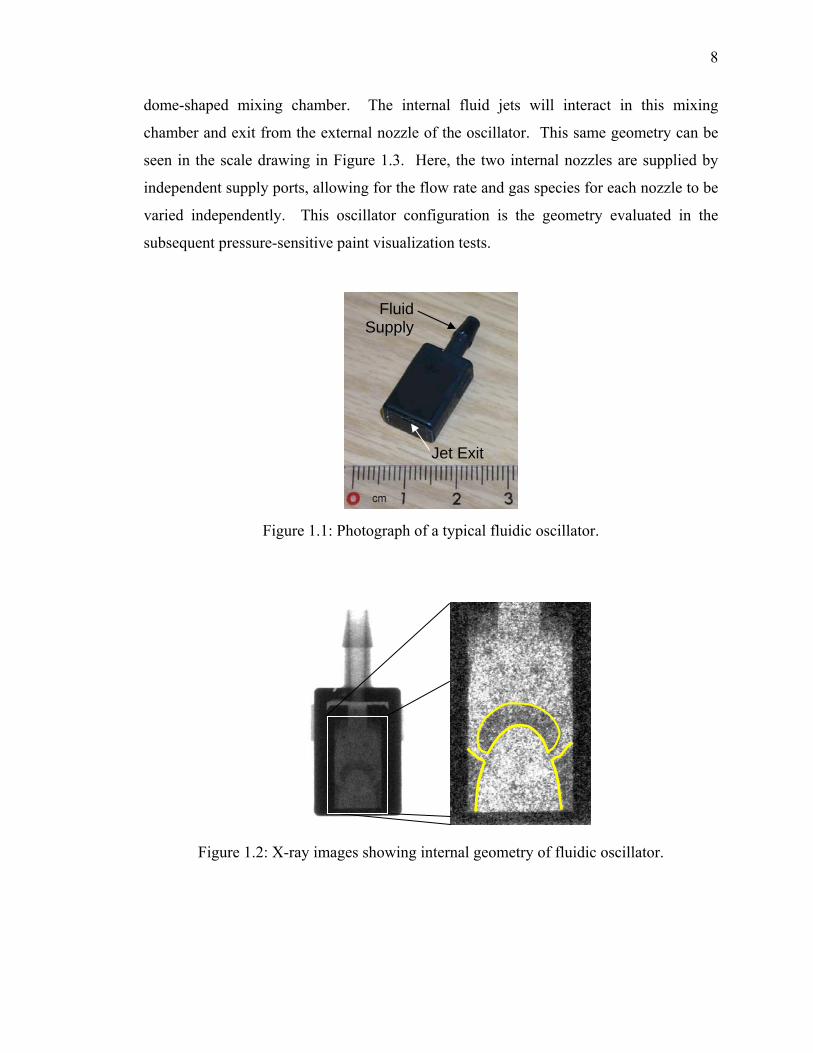
8
dome-shaped mixing chamber. The internal fluid jets will interact in this mixing
chamber and exit from the external nozzle of the oscillator. This same geometry can be
seen in the scale drawing in Figure 1.3. Here, the two internal nozzles are supplied by
independent supply ports, allowing for the flow rate and gas species for each nozzle to be
varied independently. This oscillator configuration is the geometry evaluated in the
subsequent pressure-sensitive paint visualization tests.
Figure 1.1: Photograph of a typical fluidic oscillator.
Figure 1.2: X-ray images showing internal geometry of fluidic oscillator.
Fluid Supply
Jet Exit

9
Figure 1.3: Scale drawing of a typical fluidic oscillator internal geometry.
1.2 Schlieren Flow Visualization
A schlieren imaging setup was used to visualize the flowfield of the fluidic oscillator.
The experimental setup involved the use of a single-pass schlieren system. The
illumination source was a strobe light, a General Radio company model 1538-A
Strobotac. The flash rate of the strobe light was phase-locked to the fluidic oscillations
through a microphone measurement. A neutral density filter was placed in front of the
strobe light to control the light intensity passing through the flow and reaching the
camera. A 6-inch diameter front-surface concave mirror with a focal length of 5 feet was
used to pass the light through the flowfield. A knife-edge was placed at the focal point of
the mirror to improve the image contrast. The flowfield was then imaged with a digital
video camera. HFC-134a refrigerant gas was used as a supply fluid for these images,
since the high density gradient can be easily viewed with schlieren instrumentation. The
flow pattern of this particular fluidic oscillator (Figure 1.1) is shown in phase-averaged
the schlieren images in Figure 1.4. Notice that the jet varies roughly in a saw-tooth
fashion. The jet begins to thoroughly mix with the ambient fluid just a few jet diameters
downstream of the nozzle. Thus, the schlieren images reveal a flowfield rich in high-
frequency content that is beneficial for mixing.

10
(a) (b)
Figure 1.4: Schlieren images of the fluidic oscillator flowfield at (a) 0° phase and (b) 180° phase.
1.3 PSP Experimental Setup
A schematic of the instrumentation setup used for the PSP experiments is shown in
Figure 1.5. A rough outline of the geometry of the patented oscillator36 is shown in the
figure. The paint was applied to the inside back wall of the fluidic oscillator, and a clear
acrylic cover was mounted on the other side for optical access. The particular PSP
formulation used in these experiments was polymer/ceramic PSP (PC-PSP). The
polymer/ceramic paint is a hybrid development – it is highly porous because of the
ceramic particles, with only a small amount of polymer used to bind the paint together.
Details of the polymer/ceramic paint development are available from Scroggin, et al.54
and Gregory.41

11
Figure 1.5: Experimental setup for the pressure-sensitive paint measurements.
Nitrogen gas was supplied to the left input, and oxygen gas to the right. The flow
rates of each gas were measured with FT-133 calibrated flow rate tubes from Dwyer
Instruments, and the pressures were measured with a Heise DXD pressure transducer. A
Kulite pressure transducer (XCQ-062-15D) was mounted near the nozzle exit of the
fluidic oscillator to record the operating frequency. The frequency bandwidth of the
Kulite transducer and its signal conditioner is well over 100 kHz. The Kulite signal was
passed through analog high-pass and low-pass filters before being measured on a
Tektronix 466 analog oscilloscope and an Ono-Sokki CF-4220 personal FFT analyzer.
PSP measurements were made with a Photometrics 14-bit CCD camera and an ISSI LM2
pulsed LED array for illumination. A camera shutter speed of 0.7 s (typical) was
required to fill the pixel wells to near-capacity for best results. Since the flowfield is
unsteady, phase-locking techniques were required to record time-resolved PSP data. The
pulsing of the LED array was synchronized with the oscillations measured by the Kulite
pressure transducer through the gating function on a triggered oscilloscope. A variable
delay was added to the oscilloscope’s TTL pulse with a Berkeley Nucleonics BNC-555

12
pulse/delay generator. Phase-locked time histories were recorded by varying the delay
throughout the oscillation cycle. Thus, this system makes phase-averaged measurements
of the unsteady flowfield. The excitation pulse width was typically 2.5% of the
oscillation period, and each delay step was 5% of the period.
Once raw intensity images of the painted oscillator were acquired with the CCD
camera, the data was reduced to provide gas concentration results. An intensity ratio was
calculated by dividing the wind on image by a reference image, and then smoothed with a
3-pixel-square spatial filter. The intensity ratio was then converted to oxygen
concentration through a Stern-Volmer calibration. The calibration for these tests was
performed from pure oxygen at 1 atm, down to vacuum (simulating pure nitrogen at 1
atm). Once the oxygen concentration was obtained, the data was normalized between 0
(pure nitrogen) and 1 (pure oxygen). The PSP data presented in this chapter represents
gas concentration only, since current paint technology is unable to simultaneously
measure pressure and gas concentration. Any effects of pressure are neglected, since the
supply pressures are small and typically equal on both inlets.
1.4 Pressure-Sensitive Paint Visualization
1.4.1 High Flow Rates
1.4.1.1 Equal Supply Pressures
PSP visualization data in Figure 1.6 shows the internal fluid dynamics of the
oscillator at moderate flow rates and an oscillation frequency of 2.5 kHz. Each image
represents a successive phase delay of 90° within the oscillation cycle of 400 μs.
Nitrogen is the gas on the left, and oxygen is the gas on the right, with equal supply
pressures (0.34 psig). The color scale represents oxygen concentration: pure oxygen is 1,
pure nitrogen is 0, and 0.21 is atmosphere. The color scale for the flowfield data outside
the oscillator (the lower half of each image) has been adjusted to enhance contrast. The
contrast-adjusted color scale ranges from 0.2 to 0.5. An enlarged view of the internal jet
interaction is shown in Figure 1.7.

13
Notice that the jets collide near the center of the mixing chamber, but the interface
between the two jets is not stationary. The shear layer between the two jets oscillates at
the same frequency as the external jet produced by the device. In general, the amplitude
of this interface motion is larger for higher supply pressures. The shape of the shear layer
also changes as the jets oscillate. When the shear layer moves towards the left it exhibits
rightward-facing concave curvature. When the shear layer moves to the right, the
curvature is concave left. The shape of the internal mixing chamber controls the
formation and oscillatory growth of counter-rotating vortex pairs, which drive the shear-
layer oscillations.
Figure 1.6: Visualization of jet mixing at several time steps within the 400-μs period.
Figure 1.7: Internal fluid dynamics of the fluidic oscillator.

14
The jet issuing from the nozzle is fairly well mixed, because the jet interface is
directly in line with the exit. This characteristic highlights the utility of the fluidic
oscillator for fluid mixing applications. The mixing characteristics are clearly seen in
Figure 1.8. The lower portion of Figure 1.8 (a) shows the same external flowfield as
Figure 1.6, but not adjusted for contrast. In a short distance downstream of the nozzle
exit, the jet is very well mixed. The curves shown in Figure 1.8 (b) are cross-sections
taken one jet diameter downstream of the nozzle exit. Each curve represents a different
time step, as shown in the legend. The movement of the peak correlates with the external
jet oscillations shown in Figure 1.6. The evolution of the jet magnitude in time is not yet
symmetric because the output contains disproportionate levels of oxygen and nitrogen at
various points in the cycle. The excellent mixing characteristics of the oscillator are
evidenced by the 10% variation in oxygen concentration. Thus, the original nitrogen and
oxygen jets have achieved 90% mixing at a distance of one jet diameter downstream of
the nozzle. Note that the values at the edge of the jet cross-section in Figure 1.8 (a) are
0.21, corresponding to atmospheric conditions.
(a) (b)
Figure 1.8: (a) Visualization of jet mixing with equal supply pressures. (b) Cross-sections of the data along a line one jet-diameter downstream of the exit.

15
1.4.1.2 Unequal Supply Pressures
Data from a test with asymmetric flow rates is shown in Figure 1.9, with oscillations
at 5.25 kHz. In this case, the supply pressure for the oxygen (right side, 3.8 psig) was
slightly higher than the nitrogen supply pressure (left side, 3.6 psig). The asymmetry in
the flowfield is clearly evident. The oxygen jet is dominant throughout the oscillation
cycle, both inside and outside the mixing chamber, yet it is remarkable that the device is
still oscillating. The shear layer created by the confluence of the two jets is slanted
towards the incident angle of the oxygen jet. With the higher supply pressures, there is a
corresponding larger range of motion of the jets and shear layer within the mixing
chamber. There is also a wider oscillation spread of the external flowfield.
Figure 1.9: Visualization of jet mixing for unequal flow inputs at 5.25 kHz. Left inlet: nitrogen at 3.61 psig. Right inlet: oxygen at 3.81 psig.
1.4.2 Low Flow Rates
1.4.2.1 Internal Visualization
PSP measurements were made at very low flow rates as well, where markedly
different oscillatory behavior was observed. The flow rate on each inlet was 540 ± 5
mL/min, with a supply pressure of 0.103 ± 0.003 psig, yielding an oscillation frequency
of 7.8 kHz. One phase-locked PSP image is shown in Figure 1.10. At this flow rate there
were no discernable oscillations on the inside of the oscillator, despite the measurement
of oscillations in the external flowfield by the Kulite pressure transducer. One very
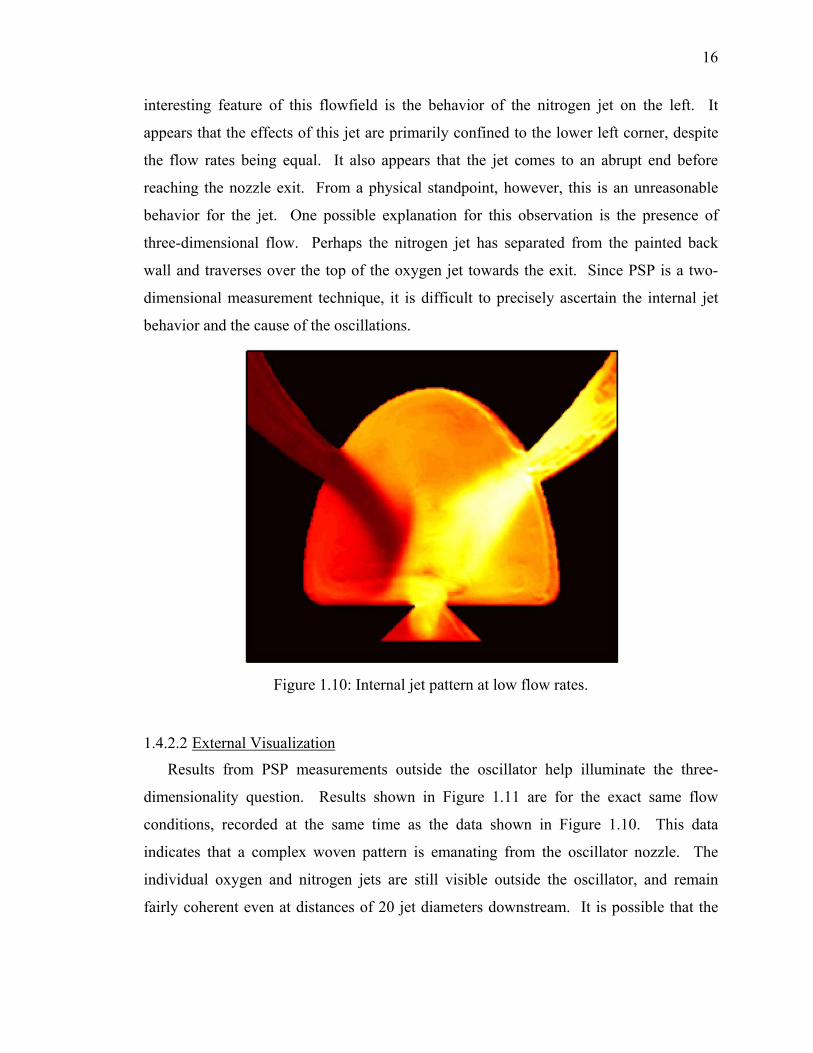
16
interesting feature of this flowfield is the behavior of the nitrogen jet on the left. It
appears that the effects of this jet are primarily confined to the lower left corner, despite
the flow rates being equal. It also appears that the jet comes to an abrupt end before
reaching the nozzle exit. From a physical standpoint, however, this is an unreasonable
behavior for the jet. One possible explanation for this observation is the presence of
three-dimensional flow. Perhaps the nitrogen jet has separated from the painted back
wall and traverses over the top of the oxygen jet towards the exit. Since PSP is a two-
dimensional measurement technique, it is difficult to precisely ascertain the internal jet
behavior and the cause of the oscillations.
Figure 1.10: Internal jet pattern at low flow rates.
1.4.2.2 External Visualization
Results from PSP measurements outside the oscillator help illuminate the three-
dimensionality question. Results shown in Figure 1.11 are for the exact same flow
conditions, recorded at the same time as the data shown in Figure 1.10. This data
indicates that a complex woven pattern is emanating from the oscillator nozzle. The
individual oxygen and nitrogen jets are still visible outside the oscillator, and remain
fairly coherent even at distances of 20 jet diameters downstream. It is possible that the

17
oscillator output is a highly three-dimensional weave of the two laminar jets, with very
little mixing. Data animations of the results in Figure 1.11 suggest that there are periodic
oscillations of this woven pattern. Despite being limited to a two-dimensional
representation, the PSP data implies that the woven structure has rotated 90° to the left,
around a vertical axis. Obviously, more detailed measurements with a three-dimensional
flow visualization technique are needed. Questions requiring conclusive answers are
whether the flow field is indeed three-dimensional, and if so, how this complex pattern is
generated.
(a)
(b)
Figure 1.11: External flowfield at low flow rates.

18
1.5 Water Visualization
1.5.1 High Flow Rates
The fluidic oscillator was also operated with water as the supply fluid for simple flow
visualization studies, and to validate the PSP measurements. Both clear water and dyed
water were used in these tests. Since the density of water is much higher than either
nitrogen or oxygen, the oscillation frequency is much lower for a given supply pressure.
Thus, it is possible to capture one instant in the oscillations with flash photography or
with a fast shutter speed on an SLR camera. Typical results with clear water (a) and
colored water (b) are shown in Figure 1.12. Both images clearly show the sinusoidal
waveform that is generated by the fluidic oscillator at a water supply pressure of 1.8 psig.
The colored water was supplied with pure red dye on the left input and pure blue dye on
the right input. Bubbles are visible in each of the lower corners of the oscillator mixing
chamber. These bubbles were observed to rotate in circles, coincident with the expected
vortical motion. Notice that the color of the fluid exiting from the oscillator just a few jet
diameters downstream from the nozzle is very homogeneous. This indicates that the red
and blue jets are mixed together thoroughly by the oscillator.
(a)
(b)
Figure 1.12: Water visualization of the fluidic oscillator at a supply pressure of 1.8 psi.

19
1.5.2 Low Flow Rates
Water flow visualization results were also obtained at low flow rates, as shown in
Figure 1.13. Clearly, the flow is not oscillating, but a long continuous stream of fluid
issues from the oscillator nozzle. Despite the lack of oscillations, the flowfield does
exhibit three-dimensional characteristics. Both images demonstrate a twisted pattern that
is somewhat similar to the woven structure seen in Figure 1.11. In particular, the colored
dye seen in Figure 1.13 (b) shows that the two jets are mixing very little. The red and
blue streams of fluid remain distinct and separate far downstream of the nozzle. The
twisting pattern is peculiar because the pair twists 90° to the left, and then 90° back to the
right, along a vertical axis. This behavior is in contrast to a continual twist about the
longitudinal axis. The direction of the 90° twist agrees with the behavior suggested by
the PSP results in Figure 1.13 (b). This twisting behavior may be thought of as axis-
switching of a rectangular jet. The major axis switches orientations with the minor axis
some distance downstream from the nozzle exit. The results shown in Figure 1.13 (b)
show the axis switching at least eight times. Axis switching of jets has been thoroughly
studied in previous work, and is summarized by Gutmark and Grinstein.57 In their review
paper, Gutmark and Grinstein even discuss jet bifurcation as a result of axis switching.
These concepts of axis switching and jet bifurcation are a plausible explanation for the
intriguing results observed at low flow rates. Further studies are needed to determine the
effects of the internal geometry on the axis switching behavior. Furthermore, three-
dimensional measurement techniques are needed to characterize the complex flow
structure at these low flow rates.

20
(a) (b)
Figure 1.13: Water visualization of fluidic oscillator at low flow rates (Pwater = 0.8 psi).
1.6 Summary
Schlieren imaging, pressure-sensitive paint, and dyed water have been used for flow
visualization studies with the fluidic oscillator. These techniques have been used to
visualize the internal fluid dynamics, as well as the external flow field of the oscillator.
This patented feedback-free device oscillates via the interaction of confluent jets in a
mixing chamber. Pairs of counter-rotating vortices within the mixing chamber drive the
oscillation of the shear layer, resulting in an external oscillatory flowfield. The fluidic
oscillator also exhibits excellent mixing characteristics. PSP data shows that the jets are
90% mixed at a distance only one jet-diameter downstream of the oscillator exit.

21
CHAPTER 2: FREQUENCY STUDIES AND SCALING EFFECTS
The oscillation frequency of the fluidic oscillator varies with the flow rate through the
device. The work presented in this chapter focuses on understanding the relationship
between the oscillation frequency and the flow rate. This information, coupled with the
flow visualization data in chapter one, will provide a detailed description of how the
oscillator functions. This work also provides a database of information available for
future design of the oscillators for specific applications. The frequency response
characteristics are recorded for the exact same oscillator used for the visualization
experiments presented in chapter one (Figure 1.3). The intriguing behavior at low flow
rates is investigated in more detail with frequency studies. Scaling effects of the fluidic
oscillator are studied next, with oscillators spanning a range in sizes of over one order of
magnitude. Aspect ratio effects are also evaluated to determine the optimum depth of the
oscillator. The effects of various inlet geometry shapes are evaluated, and their effects on
the oscillatory behavior are recorded. Variation in the test gas is studied by tests of the
oscillator supplied with air, argon, and hydrogen. Finally, the effect of unequal flow rates
on the oscillation frequency is evaluated as a companion study to the flow visualization
presented in Figure 1.9.
2.1 Experimental Setup and Data Reduction
In these tests the fluidic oscillator was instrumented with a Kulite pressure transducer
to record the oscillation frequency. Pressure transducers and rotameters were placed on
the supply line to measure the supply pressure and volume flow rate, allowing
determination of the mass flow rate. The experimental setup for these tests is virtually
the same as that shown in Figure 1.5, but without the paint sample present.

22
2.2 Fluidic Oscillator Operating Map
Power spectra of the signal from the Kulite pressure transducer provide detailed
information about the flow at each operating pressure. The operating map represented in
Figure 2.1 is a composite of power spectra across the range of operating pressures when
the oscillator (Figure 1.3) is supplied with oxygen gas. The power spectra are generated
from the Kulite signal, which was sampled at 100 kHz, with 50 kHz low-pass and 100 Hz
high-pass analog filtering. Each vertical slice of the figure represents an individual
power spectrum at a specific operating pressure. The three arrows at the top of Figure 2.1
indicate the locations of the three power spectra shown in Figure 2.2.
Figure 2.1: Frequency spectra over a range of supply pressures.
There are several interesting features about the operating map shown in Figure 2.1.
First, the primary operating frequency is clearly visible as the dark red streak, beginning
at 1.5 kHz at low pressures, and increasing to just under 5 kHz at high pressures. As the
frequency of this primary peak increases at higher pressures, the magnitude and width of

23
the peak increase as well. The second and third harmonics are also visible in the
operating map, and at higher pressures, a second trio of harmonics are visible between 30
and 40 kHz.
Figure 2.2: Power spectra at three representative pressures. The three spectra correspond to vertical slices of Figure 2.1, marked by arrows.
At very low supply pressures (up to 0.2 psig), there are some very intriguing results.
These are highlighted in the enlarged portion of the operating map shown in Figure 2.3.
This figure simply represents the lower-left region of Figure 2.1. Before the inception of
the 1.5 kHz oscillations at about 0.205 psig, there are oscillations at very low flow rates
and very high frequencies. Oscillations begin at 0.122 psig, with a frequency of
approximately 10 kHz. As the pressure increases, the frequency also increases rapidly,
while a secondary peak develops at 7.5 kHz. At a pressure of 0.136 psig, the 10 kHz
peak completely vanishes, and the 7.5 kHz peak is dominant. Subsequently, at 0.141 psig
a new peak appears at 9.7 kHz, and the 7.5 kHz rapidly evanesces. The frequency of the
new 10 kHz peak rapidly increases with supply pressure, until 0.159 psig. At this point,
the slope of the curve decreases slightly, and broadband noise is incipient. Shortly
thereafter, the 1.5 kHz primary peak develops and the 10 kHz peak eventually fades.

24
Figure 2.3: High-frequency mode-hopping at very low supply pressures.
There seems to be some type of mode hopping that occurs as the frequency jumps
from 10 kHz down to 7.5 kHz, back up to 10 kHz, and finally down to 1.5 kHz. This
entire process occurs within a pressure range of only 0.08 psig! This pressure range
corresponds to extremely low flow rates – from 1168 up to 1600 mL/min. The unusual
mode hopping behavior raises several interesting questions. First, is the mode-hopping
process repeatable? Multiple investigations were performed, and similar results were
obtained each time. Second, it is possible that this behavior is due to disturbances from
the pressure regulator. To investigate this possibility, two regulators were mounted in
line, rather than just one, and similar results were obtained each time. Third, the mode-
hopping behavior depended on the supply gas used. The results presented here were
obtained with oxygen. Nitrogen exhibited mode-hopping as well, although the
frequencies were slightly different. This suggests that the molecular weight of the gas
may have an influence on the mode-hopping behavior. Fourth, the measured frequencies
and mode-hopping are very sensitive to the input pressure. A change in pressure of only
0.004 psi can induce a change in frequency of over 100 Hz! These small pressure

25
changes are on the same order as the resolution of the instrumentation (0.001 psi) and are
smaller than the specified accuracy (±0.02% FS, corresponding to ±0.006 psi). Perhaps
the most significant question about the mode-hopping behavior relates to its fundamental
nature: Are the measured oscillations and the corresponding mode-hopping an acoustic
phenomenon, or hydrodynamic? It is important to note that the flow rates where the
mode-hopping occurs are in the same range as the flow visualization data presented in
Figure 1.10 and Figure 1.11. It is clear from these figures that the rotation of the
complex, woven structure of bifurcating jets is the source of the measured oscillations.
Perhaps the discrete mode-hops are due to sudden changes (bifurcations) in the jet
structure.
2.3 Scaling Studies
Scaling studies were performed on the basic feedback-free fluidic oscillator design
for two purposes. First, the studies establish a base of engineering data available for
design of fluidic oscillators for particular applications. Second, non-dimensionalization
of the scaling data will help provide further insight into the driving mechanism of the
oscillations. Five designs were fabricated, all with the same geometrical layout as the
oscillator shown in Figure 2.4. The dimensions for each of the five designs are
summarized in Table 2.1. Each design is geometrically similar, but varies in scale by a
factor of two. Design three is considered the baseline case, with the other designs being a
factor of 2 or 4 larger or smaller than the baseline.
First, frequency studies are performed to generate a frequency map similar to Figure
2.1. In this case the frequency is plotted versus Reynolds number, which is defined as
2Vw QRed
ρμ ν
= = , 2.1
where ρ is density, V is velocity, μ is dynamic viscosity, ν is kinematic viscosity, and Q
is volumetric flow rate. The frequency map for design three (baseline) operated with air
is shown in Figure 2.5. The basic characteristics of the spectra are the same as those in
Figure 2.1, which is expected because the oscillator geometries are similar. There is a
distinct increase in the broadband noise at a Reynolds number of about 2800. This value

26
is similar to the critical Reynolds number for transition from laminar to turbulent pipe
flow (Recrit ~ 2300).58 Thus, this increase in broadband noise is an indicator of transition
of the internal jets. At low flow rates the oscillation frequency commences at about 2
kHz, as shown in the enlarged region in Figure 2.6. Seven successive harmonics are also
visible at the low flow rates. Mode-hopping is also visible in Figure 2.6; however the
nature of the mode-hopping is different than the behavior shown in Figure 2.3. This
current mode-hopping is more clearly observed by examining a plot of only the primary
frequency in Figure 2.7. Three distinct mode hops are present in the frequency response,
yet the magnitude of the frequency jump is not as great as the data seen in Figure 2.3.
The geometry of the two devices is very similar: the only differences between the two
tests are the shape and length of the inlet channel, and the test gas used (oxygen vs. air).
These observations indicate that the mode-hopping behavior is very sensitive to inlet
geometry and test gas. These properties will be evaluated in subsequent sections.
Figure 2.4: Oscillator geometry for scaling studies.
Table 2.1: Oscillator dimensions for scaling studies.
Design 1 2 3 4 5 Internal Nozzle (w1) 0.0086” 0.0172” 0.0344” 0.0688” 0.1376”
Exit Nozzle (w2) 0.01” 0.02” 0.04” 0.08” 0.16” Depth (d) 0.0060” 0.0119” 0.0239” 0.0477” 0.0954”
Aspect Ratio (AR) 1.67 1.67 1.67 1.67 1.67 Nozzle Half Angle (φ) 48.7° 48.7° 48.7° 48.7° 48.7°
w2 w1
φ
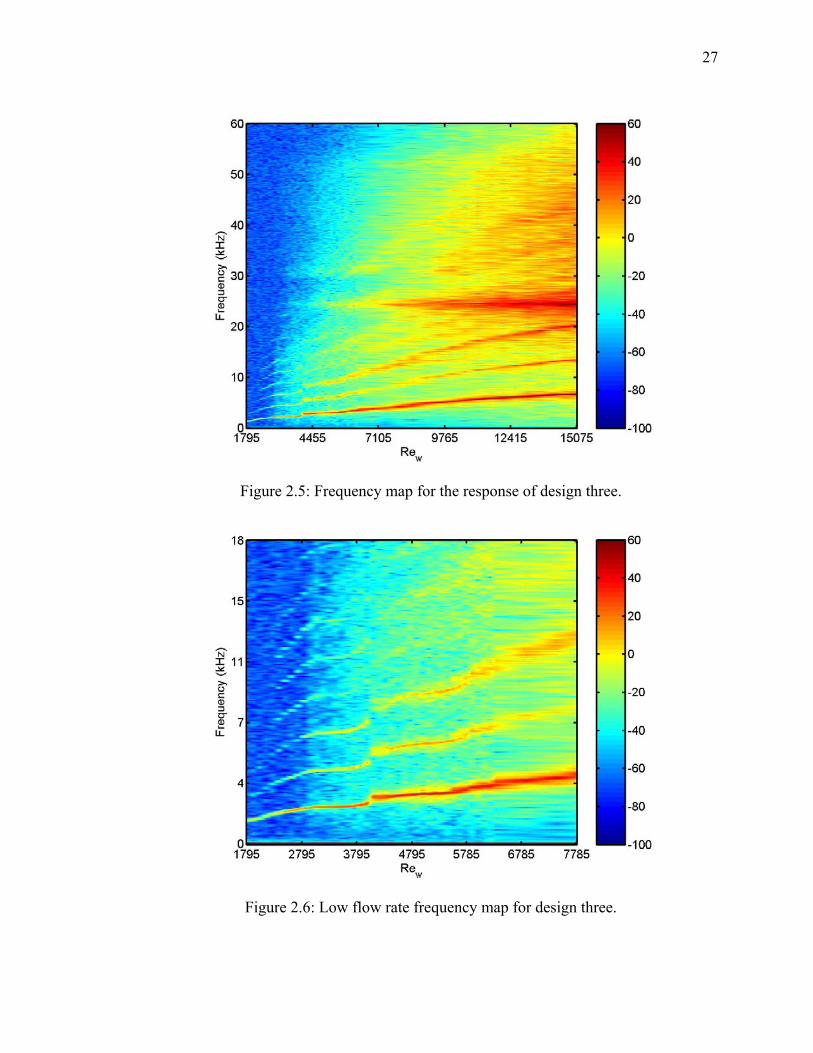
27
Figure 2.5: Frequency map for the response of design three.
Figure 2.6: Low flow rate frequency map for design three.

28
The frequency response of design three is compared with the other four designs in
Figure 2.8. The data is plotted on a log-log scale because of the wide range of flow rates
and frequencies involved. The range of flow rates spans two orders of magnitude, while
the frequency response spans over three orders of magnitude. Between the five
oscillators studied, nearly the entire range of frequencies and flow rates of Figure 2.8 can
be continuously covered. Thus, if a specific frequency or flow rate is required for a
particular application, the size of the required oscillator may be determined from the data
in Figure 2.8.
The data presented in Figure 2.8 may be non-dimensionalized in order to compare the
mode-hopping behavior of the oscillator at various scales. If the oscillation behavior is
self-similar, and the correct non-dimensionalization parameters are employed, then the
curves should collapse. Reynolds number (based on the nozzle exit dimension) is
maintained as the proper scaling parameter for the flow rate data. A reduced frequency is
defined as
2
2 2fw fdwF
V Q+ = = , 2.2
where f is the measured frequency in Hz. The scaled data for the various sizes of the
fluidic oscillator is shown in Figure 2.9. Despite the wide range of frequencies and flow
rates spanning several orders of magnitude, the curves coalesce into a group with about
±50% variation. Designs two, three, and four are the only ones that exhibit the mode-
hopping behavior at low flow rates. The mode-hopping behavior is distinctly different
between the scaled designs, however. Design two has several small jumps in frequency;
design three exhibits larger frequency jumps; while design four has only one, large mode
hop.

29
Figure 2.7: Frequency response of the primary oscillation frequency for design three.
Figure 2.8: Frequency response of all five scaled designs.

30
Figure 2.9: Reduced frequency response of all five scaled designs.
2.4 Aspect Ratio Studies
The effects of aspect ratio of the fluidic oscillators are also evaluated. Aspect ratio is
defined as the nozzle width divided by the depth of the device,
2wAR
d= . 2.3
Devices with a higher aspect ratio will have a smaller depth, and thus a smaller cross-
sectional area for a given oscillator geometry. Four designs were fabricated, all of which
had the same profile as design three (Figure 2.4). The only difference between these four
designs is in the depth of each device, which varies the aspect ratio. A summary of the
design dimensions is presented in Table 2.2.
Frequency response data for the four designs is presented in Figure 2.10. The design
with the smallest aspect ratio (largest depth) exhibits the lowest frequency response.
Devices with higher aspect ratio, and shorter depths, have a higher frequency response
for a given flow rate. This result indicates that the shear layer is more easily modulated
in the devices with a shorter depth. For the larger-depth devices, three-dimensional

31
effects become dominant, which reduces the efficacy of the internal pseudo-feedback
loop and decreases the oscillation frequency.
Table 2.2: Oscillator dimensions for aspect ratio studies.
Design AR1 AR2 AR3 AR4 Internal Nozzle (w1) 0.0344” 0.0344” 0.0344” 0.0344”
Exit Nozzle (w2) 0.04” 0.04” 0.04” 0.04” Depth (d) 0.01” 0.0239” 0.03” 0.04”
Aspect Ratio (AR) 4.00 1.67 1.33 1.00 Nozzle Half Angle (φ) 48.7° 48.7° 48.7° 48.7°
Non-dimensional data for the aspect ratio effect is presented in Figure 2.11. The
mode-hopping behavior is distinctly different for each of the four designs that were
evaluated. This indicates that the mode-hopping is a three-dimensional effect, or at least
is impacted by three-dimensional characteristics of the device. Also note that the two
short-depth designs and the two large-depth designs collapse onto separate curves. This
indicates that there is a fundamental change in the operating characteristics between the
two sets of designs.
Figure 2.10: Effect of aspect ratio on the oscillation frequency.

32
Figure 2.11: Effect of aspect ratio on reduced frequency.
2.5 Inlet Geometry Effects
To further study the causes of the mode-hopping behavior at low flow rates, the inlet
geometry of the fluidic oscillators was varied. Three oscillators were fabricated with the
same basic geometry as design three (Figure 2.4), but with different inlet channels. Scale
drawings of the designs fabricated for this work are shown in Figure 2.12. The design
with concave inlet passages (Figure 2.12a) is identical to design three. The other two
inlet channel orientations are straight and convex. These inlet orientations are chosen
because the wall pressure gradients and vorticity induced into the flow will vary
depending on the curvature of the inlet. The results of the frequency study for the three
designs are shown in Figure 2.13. The design with straight inlets produced higher
oscillation frequencies, while the convex-inlet design produced significantly lower
frequencies than the concave baseline. These differences in oscillation frequency may be
a result of the jet impingement location within the mixing chamber. The shape of the
inlet nozzle will affect the impingement location, which in turn dictates the length of the

33
feedback path and vortex size. These fluid structures are the primary mechanisms that
drive the oscillations.
Plots of reduced frequency are shown in Figure 2.14. The oscillatory behavior of the
straight-inlet design exhibited no mode-hopping behavior, and the convex-inlet design
apparently has one mode hop. This is in contrast to the presence of four mode hops in the
frequency response of the concave-inlet design. These differences in oscillatory behavior
can only be due to the variation in inlet geometry, since all other parameters were held
constant. The repeatability of the mode hopping behavior was also evaluated in this
study. The frequency response of the concave-inlet design was recorded as flow rate was
increased as well as decreased. There is no hysteresis in the value of flow rate where the
mode hop occurs. Furthermore, the curves in Figure 2.13 and Figure 2.14 show excellent
repeatability of the measurements.
2.6 Supply Gas Effects
The effects of the supply gas on the frequency response are also evaluated. Air,
argon, and hydrogen were tested in the third oscillator design (Figure 2.4). Since argon
(1.690 kg/m3) is a heavier gas than air (1.225 kg/m3), and hydrogen (0.085 kg/m3) is
much lighter, significant differences in the response of the fluidic oscillator are
expected.59 The frequency response of the oscillator to these two gases is presented in
Figure 2.15 and the reduced frequency is plotted in Figure 2.16. The oscillation
frequency is slightly lower for the response to argon gas, because the density of argon is
higher than air. Conversely, the lighter hydrogen gas produces much higher oscillation
frequencies. When presented in dimensionless form, however, the response of the
oscillator to the gases collapses to a single curve. The mode-hopping behavior is
significantly different, yet the slope of the reduced frequency curve is often similar
(between Reynolds numbers of 4000 and 6000, for example). Furthermore, the
oscillatory response at higher flow rates is very similar, with the slope of the response
being nearly identical.

34
(a)
(b)
(c)
Figure 2.12: Oscillator geometries for inlet variation study: (a) concave, (b) straight, (c) convex.

35
Figure 2.13: Effect of inlet geometry on the frequency response of design three.
Figure 2.14: Effect of inlet geometry on the reduced frequency response of design three.

36
Figure 2.15: Frequency response of design three to air and argon gases.
Figure 2.16: Reduced frequency response of design three to air and argon gases.

37
2.7 Unequal Inlet Flow Rates
Flow visualization data presented in chapter one indicated that the fluidic oscillator
has a fairly robust response to unequal flow rates on the symmetric inlets. The frequency
response due to unequal inlet flow rates is evaluated by keeping one inlet flow rate
constant, while varying the flow rate on the other inlet and measuring the frequency
response. In the data presented in Figure 2.17, the left flow input is a constant 7.4×10-5
m3/s, while the right input varies as a fraction of this from 50% to 150%. Remarkably,
the fluidic oscillator maintains oscillations throughout this range of asymmetric flow
rates, with a concomitant frequency variation from 5.5 kHz to 11 kHz. This indicates that
the fluid-dynamic mechanisms responsible for the oscillations are quite robust, and that
the oscillator can be used across a wide range of unequal flow rates. The external
flowfield of the oscillator, however, will be yawed in a preferential direction, depending
on which flow input is dominant. This yawing behavior is clearly seen in Figure 1.9,
where the right input dominates the left and the external flow is yawed to the left.
Figure 2.17: Response of the fluidic oscillator to unequal flow rates on the inlets.

38
2.8 Summary
Results presented in this chapter detail the frequency response of the fluidic oscillator
under various geometric, supply gas, and symmetry conditions. The aim of these
experiments was to provide an engineering database of information for future oscillator
designs, as well as a study of the basic fluid dynamics of the fluidic oscillators.
Frequency maps of the oscillator response indicate a flowfield that is rich in high-
frequency content, with up to the 7th harmonic visible in the spectra. Scaling studies were
performed in order to establish the operating range of the device. Oscillators were built
and tested over a range of two orders of magnitude in flow rate and three orders of
magnitude in frequency response. The observed mode hopping behavior was found to
vary with the size of the oscillator, the aspect ratio, the inlet geometry, and the test gas.
The mode hopping is due to three-dimensional effects that are highly sensitive to all of
the above conditions. The response of the oscillator to unequal supply flow rates was
also evaluated, and the fluidic oscillations are fairly robust to a wide range of input
asymmetry.

39
CHAPTER 3: CHARACTERIZATION OF THE MICRO FLUIDIC OSCILLATOR
The small-scale fluidic oscillators studied in chapter two are promising candidates for
flow control actuators. The micro-scale devices can produce a 325-μm wide oscillating
jet at high frequencies (over 22 kHz) and very low flow rates (~1 L/min or ~1 gram/min).
These properties are advantageous for flow control, because the small package can easily
be integrated into a flight vehicle, and the low flow rate requirement makes the device an
efficient actuator. In this work, the flowfield of a micro fluidic oscillator is investigated
in more detail with pressure transducers, water visualization, and pressure-sensitive paint
(PSP). The acoustic field and frequency spectrum are characterized for the oscillator at
several flow rates. Full-field PSP images were acquired of the micro fluidic oscillator
flow at oscillation frequencies up to 21 kHz. A macro imaging system was used to
provide a spatial resolution of approximately 3-μm per pixel. Thus, this work also
showcases recent advances in porous pressure-sensitive paint technology, which enable
measurements of micro-scale flows, as well as very high frequency unsteady flow.
3.1 Introduction
The micro fluidic oscillators characterized in these tests are unique in three aspects.
These actuators require very low flow rates, typically 450-1100 mL/min. In addition, the
size of the oscillating jet is on the micro scale, approximately 325 μm wide. The jet
produced by the micro fluidic oscillator has a much higher oscillation frequency than the
miniature fluidic oscillator. The typical range of oscillation frequency for the micro
fluidic oscillator is from 6 kHz up to over 22 kHz. The design of the micro fluidic
oscillator evaluated in these tests follows the principles detailed in Raghu’s patent.36 The
oscillator operates without feedback tubes: the unsteady interaction of two colliding fluid
jets inside a mixing chamber causes the oscillatory motion of the issuing jet.

40
3.2 Experimental Setup
3.2.1 Device Fabrication
The micro fluidic oscillator requires special care in the fabrication process. A small
3-axis CNC machine was used to fabricate the device out of acrylic material. The
smallest dimensions of the micro oscillator are on the order of 200 μm. Thus, the
diameter of the tooling must be less than this critical dimension. A 0.005” diameter (127
μm) end mill (Fullerton Tool, #3215SM) was used with an air turbine operating at 40,000
rpm to machine the fluidic oscillator resonance cavity.
3.2.2 Instrumentation for Frequency Evaluation
A miniature electret microphone was used to characterize the oscillation frequency of
the micro fluidic oscillator. The microphone was mounted in the near field of the
oscillator flow (within approx. 10 jet diameters). The signal was digitized with a
National Instruments BNC-2080 board and AI-16E-4 DAQ card, with a sampling rate of
250 kHz. The flow rate of the fluidic oscillator was measured with an Omega FL-3600
Rotameter, and the pressure was measured with a digital pressure transducer.
3.2.3 Pressure-Sensitive Paint
The experimental setup of the micro fluidic oscillator with PSP instrumentation is
shown in Figure 3.1. Anodized aluminum pressure-sensitive paint (AA-PSP) was used as
the PSP formulation for these tests. The anodized aluminum surface was prepared
according to Sakaue’s procedure,60 and Tris(Bathophenanthroline) Ruthenium
Dichloride, (C24H16N2)3RuCl2 from GFS Chemicals, served as the luminophore. The
paint sample was positioned parallel to the jet flow exiting the micro fluidic oscillator, as
shown in Figure 3.1.

41
Figure 3.1: Experimental setup for the pressure-sensitive paint measurements.
The imaging system consisted of a CCD camera, a bellows assembly, a reversed lens,
and a long-pass optical filter. A 12-bit Photometrics SenSys CCD camera with 512x768
pixel resolution was used for imaging. A Nikon PB-6 bellows was used to extend the
lens from the image plane, with the extension set at approximately 200 mm. A 50-mm
f/1.8 Nikon lens was reversed and mounted on the bellows with a Nikon BR-2A lens
reversing ring. A 590-nm long pass filter (Schott Glass OG590) was used for filtering
out the excitation light, and was attached to the lens bayonet mount with a Nikon BR-3
filter adapter ring.
A pulsed array of 48 blue LEDs (OptoTech, Shark Series) was used for excitation of
the PSP. This LED array removes the individual LED packaging and mounts the
individual dies in a TO-66 package, creating a compact unit. The excitation light was
filtered with an Oriel 58879 short-pass filter. For full-field imaging, the camera shutter
must be left open for an extended period (typically several seconds) to integrate enough
light for quality images. Therefore, the pulsing of the excitation light was phase-locked
with the oscillation of the micro fluidic oscillator in order to capture one point in the

42
oscillation cycle. The strobe rate was synchronized with the signal of a Kulite pressure
transducer (XCS-062) mounted in the near field of the oscillator flow. The Kulite signal
was passed to an oscilloscope with a gate function. The gate function produced a TTL
pulse with a width corresponding to the time the scope was triggered on. Thus, the
oscilloscope was used to generate a once-per-cycle TTL pulse. This TTL signal from the
oscilloscope was sent to the external trigger input of a pulse/delay generator (Berkeley
Nucleonics Corporation, BNC 555-2). The BNC pulse generator, with its variable delay,
then triggered an HP 8011A pulse generator with variable pulse width and voltage. The
output voltage of the HP pulse generator was set at 16V, and this signal directly strobed
the LED array at any arbitrary phase-locked point in the oscillation cycle. The pulse
width of the excitation light was set at 2.48 μs for the 9.4-kHz oscillations, and 1.0 μs for
the 21.0-kHz oscillations. These pulse width values are less than 2.5% and 5.0% of the
oscillation period, respectively. Images throughout the oscillation period were acquired,
with a constant delay between data points (5 μs delay for 9.4-kHz oscillations, and 2 μs
delay for 21.0-kHz oscillations). The camera exposure time for these experiments was on
the order of several seconds.
Wind-on and wind-off reference images are needed for the PSP data reduction
process. The wind-off reference image was divided by the particular wind-on image for
each phase delay. In some cases the ratio of the two images was then normalized to
match a known value in the image region.
3.3 Results and Discussion
3.3.1 Water Visualization
A simple test to verify the operation of the micro fluidic oscillator is to use water as
the working fluid. Since the density of water is much higher than air or other gases, the
operating frequency of the device is much lower. The low frequencies (on the order of
several hundred Hertz) facilitate visualization using simple techniques. The disadvantage
of using water as a working fluid is that surface tension effects may become important to
the resultant flowfield. For these tests, a digital SLR camera with macro lens and

43
external flash were used to visualize the flowfield. Typical results are shown in Figure
3.2(a), an image captured with a flash duration of 1/500 s. The flowfield issuing from the
nozzle is clearly an oscillatory waveform. The range of oscillation is several times the
diameter of the jet exit (325 μm), and the amplitude of the oscillations grows with
distance downstream of the nozzle. Figure 3.2(b) shows the oscillator at the same
operating conditions, but with a longer time exposure for a time-averaged image. It is
clear that the flow is largely bimodal, with the flow dwelling longer at the extremes.
(a) (b)
Figure 3.2: Water visualization of micro fluidic oscillator flowfield, (a) instantaneous (1/60 s with flash), and (b) time-averaged (1/2 s, no flash).
3.3.2 Frequency vs. Flow Rate Evaluation
The oscillation frequency of the micro fluidic oscillator was evaluated across a range
of flow rates. Figure 3.3 shows the variation of oscillation frequency with flow rate for
the micro fluidic oscillator. The oscillation frequency was measured by determining the
frequency of the primary peak on a power spectrum of the signal from a single electret

44
microphone. Oscillations begin at 6.0 kHz with a flow rate of 464 mL/min, and increase
in frequency up to 22.5 kHz at a flow rate of 1123 mL/min. Notice that there is a change
in slope of the curve at about 763 mL/min. During the testing, this point corresponded
with a distinct change in the tone produced by the oscillator. The variation of frequency
with flow rate is linear, but discontinuous at 763 mL/min. The values of slope for the
two linear regions are summarized in Table 3.1. It is possible that the nature of the
oscillations has changed at this inflection point. The fluid dynamics of the jet interaction
within the fluidic oscillator may be responsible for this change in behavior. This
supposition will be investigated further with the pressure-sensitive paint data.
Figure 3.3: Frequency and flow rate evaluation, oscillator operating with air.
Table 3.1: Summary of linear dependence of oscillation frequency on flow rate.
Flow Rate Range Slope Intercept 464-763 mL/min 31.8 Hz / (mL/min) –8439 Hz 763-1123 mL/min 19.2 Hz / (mL/min) 1003 Hz

45
The results in Figure 3.3 only show the variation of the primary oscillation frequency
with flow rate. The power spectrum for the oscillations is rich in higher-order frequency
content, which is not revealed in Figure 3.3. Thus, a frequency map was generated to
cover the range of supply pressures and across the entire frequency spectrum, as shown in
Figure 3.4. Each vertical slice of this frequency map is essentially an individual power
spectrum at one specific operating condition. The color scale in the figure represents the
relative magnitude within the power spectrum. Both supply pressure and volumetric flow
rate were measured simultaneously, such that mass flow rate may be determined if one
assumes an ideal gas and calculates density using ambient conditions (in this case, 296.6
K and 99.622 kPa). The corresponding mass flow rates for the abscissa of Figure 3.4
range from 0.52 g/min up to 2.7 g/min. Unfortunately, the original oscillator that was
characterized in Figure 3.3, and which was used for the PSP experiments, was
unavailable for this test. Instead, an oscillator of the same geometry was fabricated.
Manufacturing tolerances yielded slight changes in the geometry, resulting in a slightly
different oscillator flowfield. Thus, the results shown in Figure 3.4 should only be
considered representative of a typical micro oscillator, and should not be directly
compared with the results shown in Figure 3.3. The frequency map in Figure 3.4 clearly
shows the primary frequency peak, beginning at just under 10 kHz and increasing to
approximately 20 kHz. Higher harmonics are clearly visible all the way up to 100 kHz,
particularly at the low flow rates. This indicates that the oscillations are very rich in
high-frequency content. Another interesting feature visible in the frequency map is the
sudden incidence of broadband noise at a supply pressure of 6.76 kPa. This can be seen
on the frequency map as the sudden increase in the noise floor, indicated by a change in
color from dark blue to cyan (approx. 10 dB increase). The change in the noise level is
typically associated with a transition from laminar to turbulent flow inside the oscillator,
as discussed in chapter two. Also noteworthy is the evanescence of the primary
frequency peak at a supply pressure of about 17.7 kPa. At about the same pressure, a
new high-frequency peak emerges at approximately 70 kHz. This high frequency peak
then dominates the power spectrum for higher pressures.

46
Figure 3.4: Frequency response of the fluidic oscillator supplied with air.
3.3.3 Pressure-Sensitive Paint Results
Two points on the frequency curve of Figure 3.3 were chosen for further evaluation
with pressure-sensitive paint. One point was chosen in the first linear region of the curve,
at a low flow rate where oscillations just begin. The second point was selected in the
other linear region, at a high flow rate near the highest oscillation frequency.
The first point corresponds to an oscillation frequency of 9.4 kHz, near the low end of
the frequency range. This represents a very low flow rate (554 mL/min or ~0.67 g/min,
with a supply pressure of 6.69 kPa). A Kulite pressure transducer was positioned in the
near field of the jet oscillations, and the time history recorded. The power spectrum of
this signal is shown in Figure 3.5. Note that the spectrum is rich in higher-frequency
harmonics, in addition to the primary peak at 9.4 kHz. PSP data for this flow condition is
shown in Figure 3.6 (a) through (c). This PSP data was acquired with nitrogen gas for

47
high-contrast visualization. A photographic bellows was used with the CCD camera to
create an image 4x life size on the image plane. The dimensions on the axes of the
images were calibrated by imaging a scale with 100 lines per inch and determining the
imaging area of each pixel. Note that the entire image area covers a region measuring
approximately 2000-μm square, with each pixel representing an area measuring 3.2-μm
square. This represents one of the smallest flow fields visualized with PSP technology,
following the work of Huang, et al.61
The data shown in Figure 3.6 is phase-averaged through one period of the jet
oscillation, with each image representing successive time delays from a fixed trigger.
Each image is separated by 20 μs, or approximately 19% of the total cycle. Another
representation of this same data set is shown in Figure 3.7. This plot represents a cross-
section of the PSP data taken at a point 500-μm downstream of the nozzle exit. Each
curve in the figure represents a successive time step of 10 μs. Notice that the jet has a bi-
stable behavior: the jet snaps between the two end points. The transition time for the jet
between the two extremes is very fast (on the order of 20 μs), while it dwells longer at the
outer positions. The distance traversed by the jet between the two extremes is
approximately 300 μm. The oscillatory motion is similar to a square wave, or possibly
triangular. Another indicator of the oscillator characteristics is the RMS intensity plot
shown in Figure 3.8. For each pixel location, a phase-averaged time-history is generated
from the PSP intensity data. The root-mean-square value of the fluctuations is calculated
for each point in the flow. This figure indicates that there is a two-lobed region of high
fluctuations, with the area near the jet centerline being relatively constant. This supports
the bi-modal observation of the jet oscillations. The slight asymmetry visible between
the two lobes may be due to imperfect alignment of the PSP with respect to the nozzle.

48
Figure 3.5: Power spectrum of Kulite signal, 9.4 kHz oscillations.
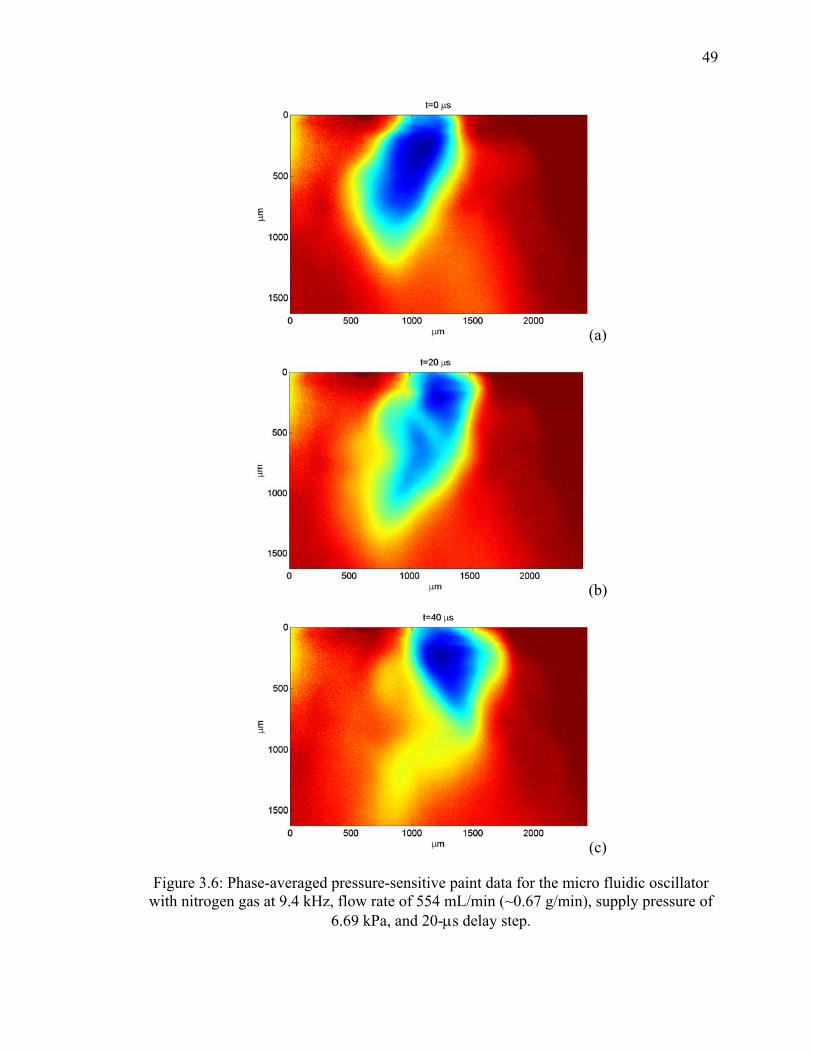
49
(a)
(b)
(c)
Figure 3.6: Phase-averaged pressure-sensitive paint data for the micro fluidic oscillator with nitrogen gas at 9.4 kHz, flow rate of 554 mL/min (~0.67 g/min), supply pressure of
6.69 kPa, and 20-μs delay step.

50
Figure 3.7: Cross-sectional data taken from the PSP results at 9.4 kHz, at a location 500 μm downstream of the nozzle exit.
Figure 3.8: RMS Intensity plot from the phase-averaged time history at 9.4 kHz.
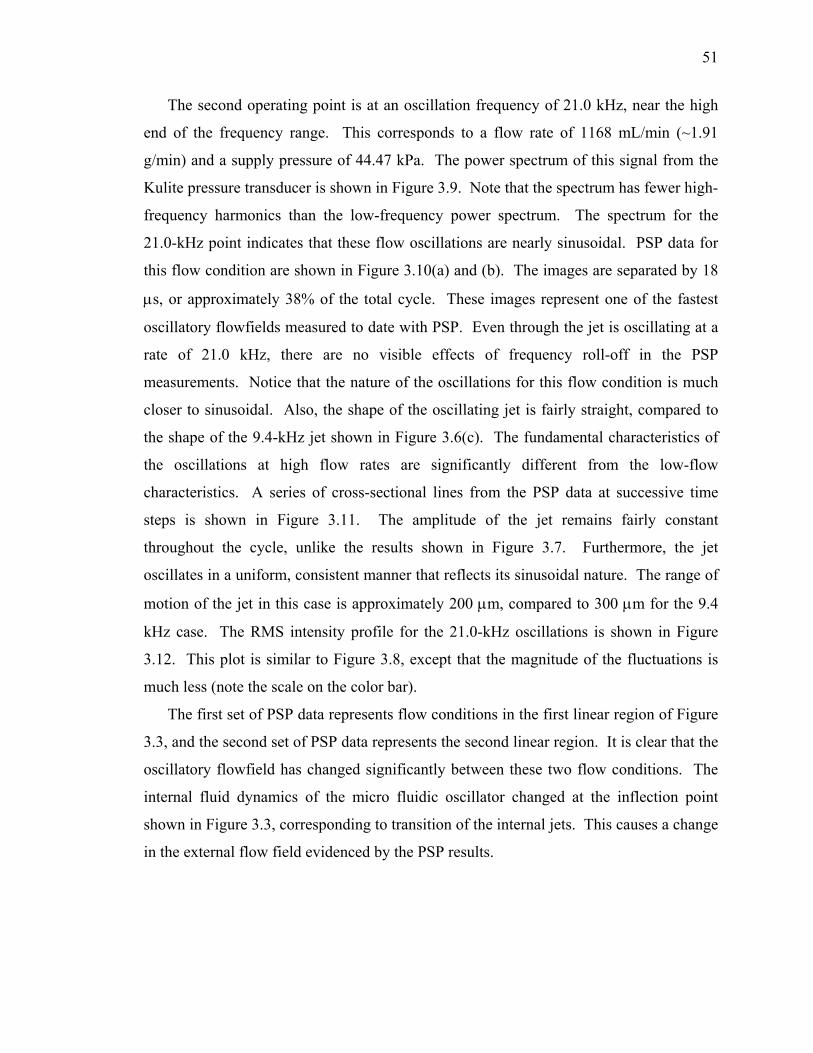
51
The second operating point is at an oscillation frequency of 21.0 kHz, near the high
end of the frequency range. This corresponds to a flow rate of 1168 mL/min (~1.91
g/min) and a supply pressure of 44.47 kPa. The power spectrum of this signal from the
Kulite pressure transducer is shown in Figure 3.9. Note that the spectrum has fewer high-
frequency harmonics than the low-frequency power spectrum. The spectrum for the
21.0-kHz point indicates that these flow oscillations are nearly sinusoidal. PSP data for
this flow condition are shown in Figure 3.10(a) and (b). The images are separated by 18
μs, or approximately 38% of the total cycle. These images represent one of the fastest
oscillatory flowfields measured to date with PSP. Even through the jet is oscillating at a
rate of 21.0 kHz, there are no visible effects of frequency roll-off in the PSP
measurements. Notice that the nature of the oscillations for this flow condition is much
closer to sinusoidal. Also, the shape of the oscillating jet is fairly straight, compared to
the shape of the 9.4-kHz jet shown in Figure 3.6(c). The fundamental characteristics of
the oscillations at high flow rates are significantly different from the low-flow
characteristics. A series of cross-sectional lines from the PSP data at successive time
steps is shown in Figure 3.11. The amplitude of the jet remains fairly constant
throughout the cycle, unlike the results shown in Figure 3.7. Furthermore, the jet
oscillates in a uniform, consistent manner that reflects its sinusoidal nature. The range of
motion of the jet in this case is approximately 200 μm, compared to 300 μm for the 9.4
kHz case. The RMS intensity profile for the 21.0-kHz oscillations is shown in Figure
3.12. This plot is similar to Figure 3.8, except that the magnitude of the fluctuations is
much less (note the scale on the color bar).
The first set of PSP data represents flow conditions in the first linear region of Figure
3.3, and the second set of PSP data represents the second linear region. It is clear that the
oscillatory flowfield has changed significantly between these two flow conditions. The
internal fluid dynamics of the micro fluidic oscillator changed at the inflection point
shown in Figure 3.3, corresponding to transition of the internal jets. This causes a change
in the external flow field evidenced by the PSP results.

52
Figure 3.9: Power spectrum of Kulite signal, 21.0 kHz oscillations.

53
(a)
(b)
Figure 3.10: Phase-averaged pressure-sensitive paint data for the micro fluidic oscillator with nitrogen gas at 21.0 kHz, flow rate of 1168 mL/min (~1.91 g/min), supply pressure
of 44.47 kPa, and 18-μs delay step.

54
Figure 3.11: Cross-sectional data taken from the PSP results at 21.0 kHz, at a location 500 μm downstream of the nozzle exit.
Figure 3.12: RMS Intensity plot from the phase-averaged time history at 21.0 kHz.

55
3.4 Summary
The micro fluidic oscillator is an excellent candidate for a flow control actuator. The
fluidic device produces an unsteady jet that oscillates at frequencies from 6 to 22 kHz.
These particular micro oscillators require only very small flow rates – on the order of 1
L/min (~1 g/min). One of the most significant advantages of the fluidic oscillator is its
simplicity. Fluidic oscillations are generated purely by fluid dynamic phenomena; thus,
the lack of moving parts makes the micro oscillator attractive as a practical excitation
device.
As such, the flow field of the micro fluidic oscillator needed to be characterized. This
work used porous pressure-sensitive paint to make time-resolved full-unsteady
measurements of the jet oscillations. In addition, microphones and Kulite pressure
transducers were used to characterize the power spectra at various operating conditions.
Water flow was also used to visualize the instantaneous and time-averaged behavior of
the micro oscillator.
The dependence of frequency on flow rate was evaluated and found to range from 6
kHz to over 22 kHz, corresponding to flow rates of about 400 to 1100 mL/min.
Interestingly, the variation of frequency with flow rate was found to be linear, except at
one distinct inflection point. The oscillations above and below this inflection point were
shown to exhibit different characteristics. Oscillations at points below the inflection
point were similar to a square wave or triangular wave, with rich high-frequency content.
Oscillations above the inflection point, however, were nearly sinusoidal as shown by PSP
data and power spectra.

56
CHAPTER 4: MODULATED JET BURSTS WITH A PULSED FLUIDIC OSCILLATOR
4.1 Introduction
In the field of active flow control, there is a need for actuators that can address
multiple time scales simultaneously. These situations arise when there is a low-
frequency component and a high-frequency component to the flowfield. In some
situations, the low-frequency component is related to instabilities such as vortex
shedding, while the high-frequency component is related to fine-scale turbulent mixing.
The ideal actuator would be able to address both of these time-scales simultaneously.
In this work, the high-frequency flowfield of a miniature fluidic oscillator is
modulated by a pulsed solenoid valve. The solenoid valve input to the oscillator
modulates the flow at a low frequency on the order of 200 Hz or less. The fluidic
oscillator, however, oscillates the supplied air at a frequency on the order of 3 kHz.
Thus, with a simple combination of two modulating sources, a dual time-scale actuator
can be developed.
The fluidic oscillator used in these tests is shown in Figure 1.1. This device measures
only about 1-cm wide, allowing it to be employed in many space-limited applications on
aircraft. The high-frequency flowfield of the oscillator is shown in the schlieren images
in Figure 1.4. This particular oscillator generates a sawtooth waveform when supplied
with a fluid at pressure. The oscillator operates with no moving parts, and its operation is
based purely on fluid dynamic interactions within the oscillator cavity.

57
4.2 Experimental Setup
This new actuator concept is comprised of a fluidic oscillator driven by a solenoid
valve. The fluidic oscillator produces the high-frequency content of the flowfield, while
the solenoid valve produces the low-frequency carrier signal. The solenoid valve is
driven by a square wave from a BNC-555 pulse generator (Berkeley Nucleonics
Corporation). The driving signal from the pulse generator was varied in frequency,
magnitude, and duty cycle to control the solenoid valve. The pressure supplied to the
solenoid valve was also controlled by a pressure regulator. The flowfield of the fluidic
oscillator was characterized by a hot film probe and a Kulite pressure transducer, as
shown in Figure 4.1. The pressure transducer was mounted between the solenoid valve
and the fluidic oscillator, to record the input pressure fluctuations to the oscillator. The
hot film probe was positioned in the oscillatory jet flow and recorded the velocity time-
history.
Figure 4.1: Experimental setup for characterization of the pulsed-fluidic oscillator.

58
4.3 Results
The actuator behavior was characterized at multiple frequencies and multiple
pressures. The driving frequency of the pulse generator determines the rate of the low-
frequency carrier signal. The pressure supplied to the fluidic oscillator determines not
only the velocity of the jet exiting from the actuator, but also the rate of the high-
frequency component of the flowfield. Furthermore, the response of the actuator to
variations in duty cycle was also evaluated. These tests are performed with the aim of
characterizing the operating range of this new actuator and understanding its limitations.
4.3.1 Carrier Frequency Variation
The solenoid valve was driven at rates ranging from 10 Hz to 200 Hz, with a constant
supply pressure of 6 kPa. These results are shown in Figure 4.2, with a zoomed-in
portion shown in Figure 4.3. The frequency response characteristics of the valve begin to
roll off at frequencies beyond 100 Hz. Clearly visible in the velocity time-histories is the
presence of both the low-frequency and high-frequency (3 kHz) components of the
actuation. Each waveform shows that the high-frequency component has a startup
transient that lasts on the order of 2 to 3 ms. When the carrier frequency approaches the
frequency response limit of the solenoid valve, the pressure does not have enough time to
build up and initiate high-frequency oscillations beyond the startup transient. On the
decay side of the waveform, the high-frequency component decreases in magnitude and
frequency until the solenoid valve shuts off. This high-frequency response is expected
because the fluidic oscillator has a direct correlation between oscillation frequency and
supply pressure. Power spectra of these velocity time-histories are shown in Figure 4.4.
Note that the 3-kHz high-frequency peak in the spectrum is invariant with a change in the
low frequency carrier signal. The high-frequency spectra remain relatively unchanged
until the carrier frequency reaches 100 Hz, where the magnitude of the high-frequency
peaks begins to diminish.

59
Figure 4.2: Variation of carrier frequency from 10 Hz to 200 Hz, with a constant high-frequency of 3 kHz and a supply pressure of 6 kPa.
Figure 4.3: Zoomed-in portion of Figure 4.2.

60
Figure 4.4: Power spectra of the time histories shown in Figure 4.2.
4.3.2 Pressure Variation
The response of the solenoid valve to pressure variation is shown in Figure 4.5. The
carrier frequency is held constant at 50 Hz, but the supply pressure is varied such that the
output of the valve ranges from 0.5 kPa to over 13.5 kPa. At the higher pressures the
valve has more difficulty in modulating the waveform as a square wave. This roll-off in
the response of the solenoid valve will have an effect on the fluidic oscillator response,
particularly at higher pressures. Velocity measurements of the fluidic oscillator response
at these supply pressures are shown in Figure 4.6 and Figure 4.7. The amplitude of the
dual-modulated jet increases with the supply pressure, as expected. Furthermore, the
high-frequency component of the signal increases with the supply pressure as well. Thus,
for a given carrier frequency (50 Hz in this case), the frequency and magnitude of the
high-frequency component can be controlled independently of the carrier frequency by
varying the supply pressure. This frequency shift is clearly visible in the power spectrum
shown in Figure 4.8.

61
Figure 4.5: Input pressure variation, measured by a Kulite pressure transducer between the solenoid valve and the fluidic oscillator, with a constant carrier frequency at 50 Hz.
Figure 4.6: Response of the dual-frequency actuator to changes in pressure, with a constant carrier frequency of 50 Hz.

62
Figure 4.7: Zoomed-in portion of Figure 4.6. The high-frequency component increases in frequency and amplitude as the pressure is increased.
Figure 4.8: Power spectra of the time histories shown in Figure 4.6.

63
4.3.3 Duty Cycle Variation
The duty cycle of the signal applied to the solenoid valve was varied from 12.5% up
to 87.5%, and the response of the solenoid valve was recorded by the pressure transducer.
This data is shown in Figure 4.9 for a supply pressure of approximately 14.5 kPa and a
carrier frequency of 25 Hz. The response of the solenoid-fluidic combined actuator is
shown in Figure 4.10 and Figure 4.11. Note that the startup transient and decay of the
high-frequency component of the waveform are the same for each duty cycle. The
primary effect of the duty cycle variation is to determine the length of time that high-
frequency actuation is on for a given period of the carrier signal. This allows for tailoring
the level of high-frequency mixing available for a given forcing frequency (the low-
frequency carrier). Figure 4.12 illustrates that the high-frequency peak is invariant with
changes in the duty cycle of the carrier signal.
Figure 4.9: Input duty-cycle variation, measured by a Kulite pressure transducer between the solenoid valve and the fluidic oscillator.

64
Figure 4.10: Response of the actuator to variation in duty cycle. Pressure remains constant and the carrier frequency remains constant at 25 Hz.
Figure 4.11: Zoomed-in portion of Figure 4.10.

65
Figure 4.12: Power spectra of the time histories in Figure 4.10.
4.4 Summary
This work has demonstrated the development of a combined fluidic oscillator /
solenoid valve device as a flow control actuator. This type of actuator is useful for
applications where dual time-scales of modulation are required. The solenoid valve
modulates the carrier jet at a frequency on the order of 100 Hz, while the fluidic oscillator
modulates the jet at a much higher frequency of 3 kHz. The response of this actuator to
variation in the low-frequency carrier signal, supply pressure, and duty cycle was studied.
These parameters establish the operating limits of the current configuration of this
actuator concept. This new actuator will be particularly beneficial for flow control
applications where disparate high- and low-frequency actuation is required for
simultaneous mixing and forcing.

66
CHAPTER 5: DEVELOPMENT OF THE PIEZO-FLUIDIC OSCILLATOR
This chapter describes a new actuator for flow control applications: the piezo-fluidic
oscillator. The actuator is a fluidic device based on wall-attachment of a fluid jet, and
modulated by piezoelectric devices. The piezo-fluidic oscillator successfully decouples
the operating frequency from the flow characteristics of the device. The frequency is
specified by an input electrical signal that is independent of pressure, making this
actuator ideal for closed-loop control applications. The oscillator exhibits high
bandwidth (up to 1.2 kHz), modulation rates up to 100%, and a velocity range reaching
sonic conditions. Furthermore, the bi-stable actuator may be operated in a steady state,
with momentum flux in one of two desired directions. The piezo-fluidic oscillator may
be used in flow control applications where synthetic jets cannot provide enough
momentum for control authority. The actuator can also be used as an alternative to
traditional aircraft control surfaces while operating in the steady bi-directional mode.
This chapter details the design and characterization of the piezo-fluidic oscillator. The
dynamic response characteristics are evaluated with flow visualization and hot film probe
measurements on the output.
5.1 Introduction
Flow control is a rapidly developing field in applied fluid dynamics, with much of the
work focused on actuator development, sensor systems, control logic, and applications.
Flow control actuators are devices that are used to enact large-scale changes in a
flowfield. Often these changes are focused on improving the performance of a flight
vehicle – by delaying stall, reducing drag, enhancing lift, abating noise, reducing
emissions, etc. In many flow control situations, unsteady actuation is required for
optimal performance. Unsteady actuators are particularly beneficial in closed-loop

67
control applications when the unsteady actuation can be controlled and synchronized with
characteristic time scales of the flowfield.
The ideal actuator will have a high frequency bandwidth and direct control by an
electrical signal for closed-loop applications. The device should be simple and robust for
reliable flight operations, for devices with few moving parts are desirable for mechanical
reliability. The ideal actuator should also be capable of a large range of flow rates, but
only enough for sufficient control authority. Some applications require large flow rates
that current actuators cannot deliver. Jet thrust vectoring on a flight vehicle is one such
example. D.Miller62,63 has specified that the ideal actuator for this application is a pulsed
jet that operates at 1 kHz with 100% modulation of the jet at sonic conditions. The focus
of this work is development of the piezo-fluidic oscillator towards these design goals.
The fluidic oscillator that forms the basis for this new invention is one that operates
on the wall-attachment principle, as shown in Figure 5.1. When a jet of fluid is adjacent
to a wall, entrainment of flow around the jet causes a low-pressure region between the
wall and the jet that draws the jet closer to the wall. Thus, the jet will deflect until it has
attached to the wall. This principle was observed by Henri Coanda in the 1930’s34 and
was later named the Coanda effect.35 The Coanda effect is most commonly encountered
in daily life by observing a stream of water from a faucet attach to one’s hand when the
two are brought close together. Coanda noticed this phenomenon and applied the
principle to steering streams of fluid.
If there are two adjacent walls, such as the symmetric configuration shown in Figure
5.1, the jet will randomly attach to one wall or the other, based on the randomness of
turbulence in the flow. Now, if a pressure pulse is introduced at the control port
perpendicular to the jet, the jet will detach from the wall and re-attach to the opposite
wall. This occurs through the creation of a separation bubble between the jet and the
wall. As more fluid is injected from the control port, the separation bubble enlarges and
extends downstream until the jet has entirely separated. The pressure differences and
momentum of this separation process then carry the jet over to the opposite wall where it
re-attaches.

68
Figure 5.1: The principle of wall attachment in a fluidic device, known as the Coanda Effect.
If the two control ports are set up with a feedback loop system, then the fluidic device
can create self-sustained oscillations. This is the typical arrangement of many traditional
fluidic oscillators. The disadvantage of this arrangement, however, is that the frequency
of oscillations is directly coupled to the flow rate of the device.
For practical flow control problems, it is highly desirable to decouple the operating
frequency from the flow rate of the actuator. This is the motivation for developing a
piezoelectric-driven fluidic oscillator. This concept has been used in the past to develop
a bi-stable pneumatic valve for fluid amplifier technology. The field of fluidics was a
significant focus of research efforts in the 1960’s and 70’s. Some of this work
concentrated on developing electro-fluidic converters. W.Miller64 originally proposed
using piezoelectric devices for fluidic control. He implemented a double-clamped
piezoelectric bender to produce acoustic signals for control. As such, the pressures
produced by the piezo bender were very low (~ 100 Pa) and even a high-gain fluidic
amplifier would have a marginal output. He did demonstrate operation of the device up
to 1 kHz. Tesar65 was also an early developer of the concept of external control of a
fluidic device. He demonstrated the use of a ferromagnetic filament to guide a jet of air
or water in various directions through the Coanda effect. The deflection of the filament
was controlled by an adjacent electromagnet. His demonstrations were confined to low
frequency deflections (68 Hz) at low pressures. Tesar also briefly suggested the use of
Receptivity Zone

69
filaments with an electrostatic charge, as well as piezoelectric benders for jet control.
Taft and Herrick66,67 used a piezoelectric bender to alternately block the input to either
one of the two control ports. They operated the device in an unsteady mode, and
recorded a flat frequency response up to about 40 Hz with a corresponding phase shift of
90°.66 In later work they demonstrated a flat frequency response of 1 kHz with this same
device.67 Chen68,69 developed a mono-stable fluidic injector with a piezo bender on the
unstable-side control port. His work focused on developing the device as a fuel injector
for natural gas engines. He achieved switch-on response times of 1.65 ms and switch-off
response times of 1.85 ms.
This work seeks to develop a piezo-driven fluidic oscillator for use as a flow control
actuator. A bi-stable, wall-attachment fluidic oscillator is used along with piezoelectric
transducers to achieve oscillatory or steady-state control flow. The piezo-fluidic
oscillator successfully decouples the operating frequency from the supply pressure to the
device. The actuator can deliver the high mass flow rates that are demanded in some
flow control applications. Furthermore, the device is shown to have a wide bandwidth,
with partial frequency coverage from 0 to 1.2 kHz.
5.2 Piezo-Fluidic Oscillator Design Concepts
The main concept of the piezo-fluidic oscillator is the modulation of a fluid jet by
piezoelectric transducers. There are many possible realizations of this concept, which are
described as follows. In all cases, the piezoelectric transducer creates a geometrical or
fluid dynamic asymmetry in a receptive location in the flowfield. The area of maximum
receptivity is just downstream of the power nozzle (as shown in Figure 5.1), where a
traditional fluidic oscillator’s control ports are typically located. The first concept
employs piezoelectric buzzers coupled to the control ports in a manner similar to
W.Miller’s design.64 The challenge with this design is that a high level of acoustic
energy is needed to reach the jet switching threshold of a practical device. This design
was attempted in the early stages of this work, but was later abandoned due to insufficient
control authority of the piezo buzzers. A similar iteration on this concept would employ
synthetic jets at the control ports.

70
Other concepts employ piezoelectric benders or extenders to change the geometry of
the device. A small asymmetry in the power nozzle region can readily cause the jet to
switch to the opposite sidewall. A single piezoelectric bender may be positioned on the
jet centerline, with the oscillating end pointing either upstream or downstream in the
flow. The oscillatory motion of the bender will cause deflection and switching of the jet
between the two sidewalls. Another concept is to use piezoelectric benders or extenders
in lieu of the control ports. When two extenders are driven 180° out of phase from one
another, a geometric asymmetry is created in the shear layer of the jet, causing the jet to
attach to the alternate sidewalls. A final concept involves a mono-stable oscillator with
only one attachment wall and a piezoelectric bender mounted flush on the attachment
wall with the free end pointing upstream into the jet. As the transducer is modulated, the
tip will be either flat against the wall, or facing into the flow such that the jet detaches
from the wall. In the mono-stable configuration, the unstable location is a free jet that is
not attached to an adjacent sidewall.
Two designs were characterized in the work presented here. Both designs rely on a
piezoelectric bender mounted on the centerline of the fluidic oscillator nozzle. The first
design has the bender tip pointing upstream into the nozzle, as shown in Figure 5.2 and
Figure 5.3. The power nozzle in this geometry is 0.5 mm wide and about 5.5 mm high,
with an adjacent wall angle of 30°. The primary disadvantage of this design is the
location of the piezoelectric transducer with respect to the flow exit of the device. The
protrusion of the bender on the exterior of the oscillator makes it somewhat infeasible for
practical applications. One possible solution is to employ a piezo bender with a much
shorter length, which would typically decrease the tip deflection range and increase the
resonance frequency. The second design, shown in Figure 5.4 and Figure 5.5, has a
similar nozzle geometry, but with the piezo bender mounted upstream of the nozzle with
the tip just downstream of the nozzle exit. The nozzle width of the second design is 3
mm wide and 5.5 mm high, with a diffuser half-angle of 15°. The nozzle width was
increased over the first design to allow room for the piezo bender to oscillate inside the
nozzle. The piezoelectric bender employed in both of these designs is a 4-layer
piezoceramic (T434-A4-302 from Piezo Systems, Inc.) that measures 72.4 mm long, 5.1

71
mm high, and 0.86 mm thick. The specified deflection of the device is ±1050 μm with a
resonant frequency of 121 Hz. The piezo bender was driven by a square wave signal
from a function generator and amplified by a Lasermetrics voltage amplifier. The
amplifier output was passed through an RC circuit to remove the DC bias on the supply.
The resulting signal supplied to the piezo bender was a 40 VRMS square wave.
Figure 5.2: Scale diagram of the first design. The piezoelectric bender is positioned in the diffuser, pointing upstream into the flow.
Figure 5.3: Photograph of the first design, with the piezo device removed for clarity.

72
Figure 5.4: Scale diagram of the second design. The bender is oriented with the tip pointing downstream from the throat.
Figure 5.5: Photograph of the second design, with the piezo bender installed.
5.3 Measurement Techniques
Instrumentation systems involved in characterizing the fluidic oscillator were
schlieren imaging, pressure-sensitive paint (PSP), and hot film probes with a computer
data acquisition system. The schlieren and PSP systems were used for flow visualization,
while the hot film probes were used for quantitative velocity and frequency

73
measurements. The experimental setup for the PSP and hot film probe techniques is
shown in Figure 5.6.
The schlieren imaging experimental setup involved the use of a single-pass schlieren
system. The illumination source was a strobe light, a General Radio company model
1538-A Strobotac. A neutral density filter was placed in front of the strobe light to
control the light intensity passing through the flow and reaching the camera. A 6-inch
diameter front-surface concave mirror with a focal length of 5 feet was used to pass the
light through the flowfield. A knife-edge was placed at the focal point of the mirror to
improve the image contrast. The flowfield was then imaged with a Nikon D100 digital
camera. Hydrogen gas was used with the oscillator to enhance the density contrast with
ambient air.
Pressure-sensitive paint was used to visualize the internal fluid dynamics of the
oscillator. Recent work with PSP has extended the frequency response well beyond 20
kHz, such that the current unsteady tests at 50 Hz are fairly straightforward. The PSP
imaging system consisted of a 14-bit CCD camera with a 55-mm f/2.8 Nikon macro lens.
A 590-nm long pass filter (Schott Glass OG590) filtered out the excitation light. The
paint sample was back-illuminated with an LED array emitting 473-nm light. The
illumination from the LED’s was phase-locked with the driving frequency of the
piezoelectric transducer. The pulse width was set to 2.5% of the period, and the delay
step was 5% of the period. One image was taken at each delay step, producing 20
equally-spaced images throughout the oscillation cycle. Nitrogen was used as the supply
gas for the PSP tests, to enable high-contrast visualization of the jet dynamics. Wind-on
and wind-off images were used to calculate the intensity ratio presented for visualization.

74
Figure 5.6: Experimental setup for the pressure-sensitive paint and hot film probe instrumentation.
Hot film probes were positioned at the ends of both attachment walls to measure the
velocity and frequency content of the exiting flow. The probes and controller have a
specified frequency response of 10 kHz. The data from the probes was recorded through
a computer data acquisition system with a sampling rate at least 500 times the driving
frequency. Data was simultaneously sampled to record the input signal to the
piezoelectric bender, as well as the velocity signals from both hot film probes.
5.4 Results and Discussion
Results presented in this section involve flow visualization with schlieren and PSP
techniques, and velocity measurements at the exit plane with hot film probes. The
velocity data is used to evaluate the response of the piezo-fluidic oscillator at various
operating conditions, and to generate frequency maps and bode plots. All of the
subsequent data is for the first design (piezo bender pointing upstream as shown in Figure
5.2), except where noted.
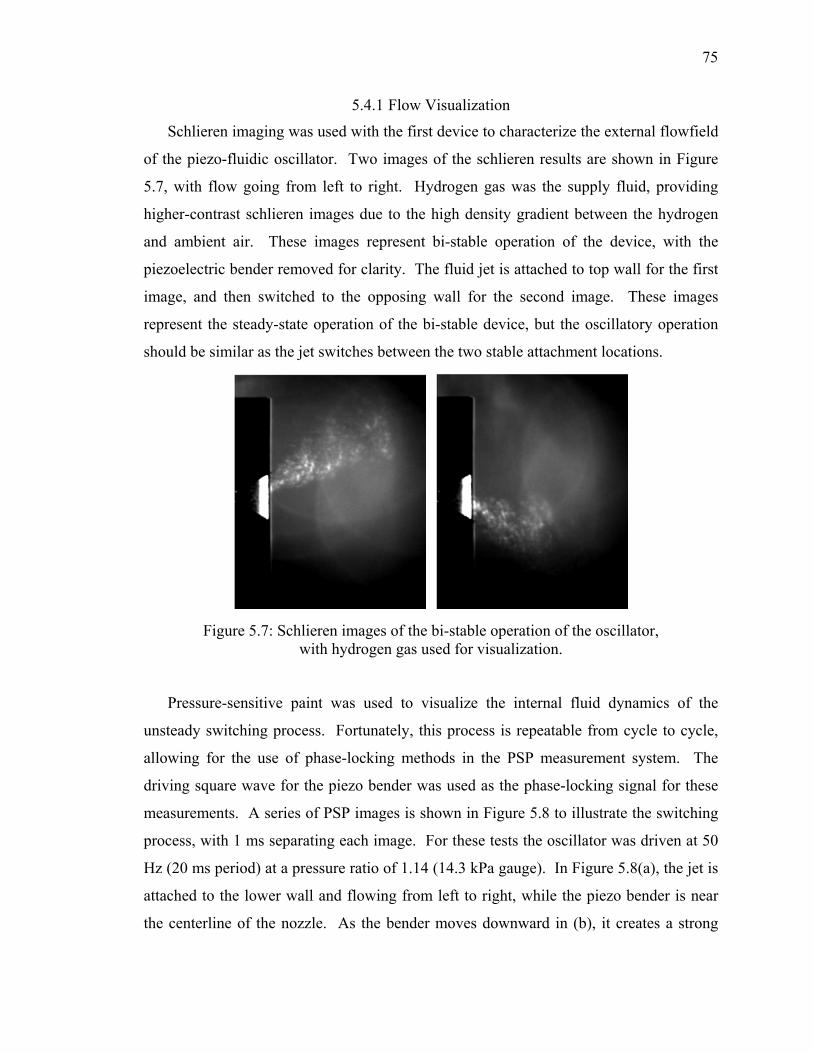
75
5.4.1 Flow Visualization
Schlieren imaging was used with the first device to characterize the external flowfield
of the piezo-fluidic oscillator. Two images of the schlieren results are shown in Figure
5.7, with flow going from left to right. Hydrogen gas was the supply fluid, providing
higher-contrast schlieren images due to the high density gradient between the hydrogen
and ambient air. These images represent bi-stable operation of the device, with the
piezoelectric bender removed for clarity. The fluid jet is attached to top wall for the first
image, and then switched to the opposing wall for the second image. These images
represent the steady-state operation of the bi-stable device, but the oscillatory operation
should be similar as the jet switches between the two stable attachment locations.
Figure 5.7: Schlieren images of the bi-stable operation of the oscillator, with hydrogen gas used for visualization.
Pressure-sensitive paint was used to visualize the internal fluid dynamics of the
unsteady switching process. Fortunately, this process is repeatable from cycle to cycle,
allowing for the use of phase-locking methods in the PSP measurement system. The
driving square wave for the piezo bender was used as the phase-locking signal for these
measurements. A series of PSP images is shown in Figure 5.8 to illustrate the switching
process, with 1 ms separating each image. For these tests the oscillator was driven at 50
Hz (20 ms period) at a pressure ratio of 1.14 (14.3 kPa gauge). In Figure 5.8(a), the jet is
attached to the lower wall and flowing from left to right, while the piezo bender is near
the centerline of the nozzle. As the bender moves downward in (b), it creates a strong

76
adverse pressure gradient in the jet and causes the jet to separate from the attachment
wall. Within 1 ms, the jet has reattached to the opposing (upper) wall since this location
is more stable than the lower wall in the presence of the piezo bender. In image (d) the
jet begins to convect downstream towards the exit of the oscillator (at the edge of the PSP
image), and the piezo bender returns to the center location. These images represent one
switching process, whereas two switches occur within each oscillation cycle.
5.4.2 Hot Film Probe Data
5.4.2.1 Velocity Time Histories
The exit flow of the piezo-fluidic oscillator was characterized by simultaneous
measurement of dual hot film probes on either side of the device. Anticipated results
should show that the two signals are 180° phase shifted from one another, and
comparable in velocity magnitude. Temporal velocity data is presented in Figure 5.9 at
(a) 10 Hz and (b) 200 Hz for a pressure ratio of 1.69 (68.9 kPa gauge). The velocity
signals for the low frequency case show very little phase delay from the control signal,
with very fast rise and decay times. The output of the oscillator at 200 Hz is phase
shifted approximately 180° from the low frequency case, but the modulation rate remains
fairly high. This operating frequency is near the maximum for this modulation mode and
the oscillator soon loses synchronization from the driving signal at higher frequencies.
As will be shown later, however, another modulation mode emerges at higher frequencies
to maintain operation to over 1 kHz.
The step response characteristics of the piezo-fluidic oscillator are shown in Figure
5.10. A step input signal was sent to the piezoelectric bender, and the velocity response
was recorded by a hot film probe at the end of the adjacent attachment wall. The test was
performed over a range of pressure ratios and the response time calculated. The step
response times are summarized in Table 5.1. As should be expected, the response time
decreases as the jet velocity increases. There is a finite amount of time required for the
jet to convect from where it is switched at the control nozzle, down to the exit of the
device. Since the convection time is related to the velocity of the jet, the higher velocities

77
will produce a faster step response. The convection time is also related to the length of
the attachment wall. As the wall length is decreased, the convection time will also
decrease. These relationships indicate that the fastest step response time can be achieved
with a high velocity jet and the shortest possible wall length. Also notice that the step
response times are reaching an asymptotic limit for this geometry as the jet velocity is
increased. This limit in the step response indicates that there are two time scales involved
in the response – one due to the fluid convection time, and the other due to delays in the
electrical and mechanical switching time of the piezoelectric bender. The first time scale
may be controlled by changing the jet velocity and wall length, while the second time
scale can only be controlled by changing the piezoelectric bender and driving circuitry.
(a) (b)
(c) (d)
Figure 5.8: Series of PSP images with successive delays of 1 ms at an oscillation frequency of 50 Hz. Flow is from left-to-right, and the piezo bender is on the right.

78
(a)
(b)
Figure 5.9: Time history of the oscillator outputs simultaneously measured by hot film probes. (a) 10 Hz, (b) 200 Hz. Pressure ratio is 1.69.

79
Figure 5.10: Step response of the piezo-fluidic oscillator.
Table 5.1: Summary of step response times.
Pressure Ratio Response Time (ms) 1.07 4.52 1.14 3.41 1.21 2.78 1.28 2.47 1.34 2.34 1.41 2.16 1.48 2.06 1.55 1.99
Although the square wave response characteristics of the oscillator begin to diminish
at 200 Hz, the device is able to oscillate at frequencies in the kilohertz range. Figure 5.11
shows the response of the piezo-fluidic oscillator at a 1.0 kHz driving frequency and a
pressure ratio of 1.14 (13.8 kPa gauge). The temporal velocity profile is no longer a
square wave, but the jet is clearly modulated at the driving frequency.
P/Patm=1.07
P/Patm=1.55

80
The piezo-fluidic oscillator also responds well at very high pressure ratios, as shown
in Figure 5.12. The pressure ratio for this case is 2.15 (115 kPa gauge), creating a sonic
jet at the power nozzle. Despite the very high dynamic pressure loads on the
piezoelectric bender, it is still able to modulate the jet at low frequencies (5 Hz).
Although the jet has not yet been modulated at both high frequency and high pressure,
design modifications are underway that should enable this performance level to be
attained.
5.4.2.2 Frequency Bandwidth
While the piezo-fluidic oscillator was operated at a pressure ratio of 1.14, the driving
frequency was swept across a range from 0 to 1200 Hz to evaluate the bandwidth
characteristics of the device. The low frequency characteristics (0 – 250 Hz) are shown
in Figure 5.13 (a) and the high-bandwidth characteristics are shown in Figure 5.13(b).
Each vertical cross section of the figures is a typical power spectrum generated from the
velocity measurements. Note that the primary frequency peak increases linearly with the
driving frequency in a 1-to-1 relationship in both figures. For the low frequency range,
the first six or seven harmonics are clearly visible and increase linearly with the input
frequency. The horizontal and vertical bands correspond to natural resonances of the
piezoelectric bender in this flowfield. Figure 5.13(b) shows that the oscillator has a wide
operating range from 0 to 1.2 kHz. There is a small region from 250 to 500 Hz where the
piezo bender is unable to modulate the jet at this pressure. Within this region, the energy
in the power spectrum shifts to the horizontal resonance line at 121 Hz. This indicates
that the beam is oscillating at its resonant frequency rather than the driving frequency in
this range. At approximately 500 Hz, however, the synchronous modulations resume and
increase linearly to the upper limit. The second and third harmonics are also visible at
the higher driving frequencies.

81
Figure 5.11: High frequency oscillations at 1.0 kHz and a pressure ratio of 1.14.
Figure 5.12: Response of the piezo-fluidic oscillator at sonic nozzle conditions. The pressure ratio is 2.15 and the oscillation frequency is 5 Hz.

82
(a)
(b)
Figure 5.13: Frequency maps of the piezo-fluidic oscillator performance at a supply pressure ratio of 1.14.

83
Magnitude and phase plots may be generated from the hot film probe velocity data.
The magnitude values are calculated from the modulation index (M) which is defined as
max min
max min
V VM
V V−
=+
5.1
where V is the measured velocity. A modulation index of 1 indicates that jet is
modulated from zero velocity up to its maximum value. The phase angle is defined as
the delay between the control signal and the measured velocity at the exit of the actuator.
This phase delay includes any electrical, mechanical, and fluid dynamic delays inherent
in the system. Figure 5.14 shows data for the (a) magnitude and (b) phase for the first
design actuator at three operating pressure ratios. First, it is important to point out that
the range of operating pressures has little effect on the response characteristics of the
piezo-fluidic oscillator across this frequency range. The modulation index remains quite
high (80 to 90%) across the entire range. The phase data shows little roll-off until the
resonance frequency of the bender is reached (121 Hz). The phase delay is less that 90°
until this point, but then quickly rolls off beyond 180°. For some applications this phase
delay is of no consequence, but for some closed-loop applications across a range of
frequencies, it can be an issue.
Data for the second oscillator design (with the piezo bender pointing downstream as
shown in Figure 5.4) is presented in Figure 5.15. The modulation index for all three
operating pressures is somewhat lower than the results for the first design, typically
ranging from 70 – 80%. Furthermore, the modulation of the low speed jet is significantly
diminished. This is most likely due to attachment of the jet to the piezo bender rather
than the adjacent attachment walls. Thus, the piezo bender serves to impart a small
deflection to the jet by directing it, rather than causing it to switch to an opposing wall.
There is also more variation in the phase data between the three pressure ratios. The
break point varies from 100 Hz for the lowest pressure up to 150 Hz for the highest. In
general, the second design (Figure 5.4) does not perform as well as the first design with
the piezo bender pointing upstream (Figure 5.2). The performance of the second design
may be improved by narrowing the width of the throat such that the jet attaches to the
walls rather than the bender.

84
(a)
(b)
Figure 5.14: (a) Magnitude and (b) phase plots of the piezo-fluidic oscillator response with the bender facing upstream.

85
(a)
(b)
Figure 5.15: (a) Magnitude and (b) phase plots of the piezo-fluidic oscillator response with the bender facing downstream (with the flow).

86
5.5 Summary
This work has presented the development of the piezo-fluidic oscillator as a new type
of flow control actuator. The oscillator can be driven directly by an electrical signal for
closed-loop control applications. The piezo-fluidic oscillator exhibits a fairly high
bandwidth with a maximum operating frequency of 1.2 kHz at certain pressures. Over a
range of 0 to 250 Hz the oscillation frequency was nearly independent of supply pressure,
and operation was maintained well beyond the piezo resonance frequency of 121 Hz.
The modulation level remained constant near 90% across this frequency range, and the
phase angle didn’t break beyond 90° until the piezo resonance frequency. For
oscillations at higher frequencies (500 to 1200 Hz), the jet is most likely modulated in
some other manner by the piezo bender, rather than by attachment to the adjacent walls.
The piezo-fluidic oscillator was also successfully operated at sonic nozzle conditions at a
frequency of 5 Hz. Two designs were evaluated in this work – one with the piezo bender
pointed upstream, and the other with the bender pointed downstream. The upstream-
pointing bender provided superior modulation characteristics, with a higher modulation
index and higher-frequency roll-off. The disadvantage of this configuration is that is less
compact and not as practical for use as an actuator in flow control applications.
Future work with the piezo-fluidic oscillator will focus on design iterations to
improve the operating characteristics. The frequency bandwidth of the oscillator may be
increased by selecting a piezo bender with a higher resonance frequency. Also, the
length of the attachment walls may be shortened in order to decrease the convection time
of the jet, thus increasing the maximum frequency. The ultimate design goal is to create
an actuator that will provide a sonic pulsed jet at 100% modulation at 1 kHz. Future
work will also involve application of this new actuator to practical flow control problems
where high bandwidth and closed-loop control is required.

87
CHAPTER 6: CAVITY TONE SUPPRESSION WITH A FLUIDIC OSCILLATOR
6.1 Introduction
This chapter details the use of fluidic oscillators for suppression of flow-induced
cavity tones. This work demonstrates the utility of the feedback-free fluidic oscillator for
a practical flow control application. High-intensity tones are produced when an open
cavity is exposed to high-subsonic, transonic, or supersonic flows. This can become a
significant issue in aircraft applications, such as weapons bays or landing-gear wheel
wells where the tones produce vibration-induced fatigue. Cavity tones are produced by
the interaction of a free shear layer with the downstream cavity wall. The shear layer is
formed when the flow separates from the leading edge cavity lip. At certain flight
speeds, the shear layer develops an instability which induces periodic shear layer growth
and oscillations. The unsteady shear layer interacts with the downstream edge of cavity.
The interaction effectively adds or removes flow from the cavity in a periodic fashion.
This process generates acoustic waves which propagate upstream and reinforce the shear
layer instability. In this manner, the cavity oscillations are self-induced and the acoustic
signal is a forced feedback mechanism. Rockwell and Naudascher70 have given a general
review of self-sustained oscillations of impinging shear layers, including discussion of
cavity resonance. Heller and Bliss71 have written a clear, concise explanation of the
cavity resonance mechanism, as well as a discussion of flow control techniques that could
be used for cavity tone suppression. Komerath, et al.72 wrote a review paper detailing
prior work to understand and predict cavity resonance phenomena.
Various flow control actuators, both passive and active, have been employed for
suppression of cavity resonance tones. Heller and Bliss used a slanted wall at the trailing
edge of the cavity to stabilize the impingement of the shear layer.71 Spoilers positioned

88
upstream of the cavity are commonly used in current aircraft applications, but do not
suppress cavity tones at supersonic Mach numbers.73 Cylinders have been placed
upstream of the cavity, where the shed vorticity from the rod-in-crossflow serves as high-
frequency excitation of the shear layer.74 Recent work with active control of cavity tones
has included steady suction and blowing75 and pulsed blowing with powered resonance
tubes (Hartmann tubes).4,76 Raman et al.29,77 used a square-wave fluidic oscillator for
suppression of the Mode II tone by 10 dB. These tests were accomplished in a jet-cavity
setup with a jet Mach number of 0.69 and 0.12% mass injection through the fluidic
oscillator. Raman’s earlier work demonstrated that the jet-cavity setup is a valid
approximation of the physics of cavity interaction with freestream flow.78
The purpose of this work is to further demonstrate the use of fluidic oscillators for
cavity tone suppression. The oscillators have the advantage of simplicity over many
other flow control actuators. They have no moving parts, but can generate an oscillating
jet of fluid at high frequency and a wide fan angle. Fluidic actuation is compared with
steady blowing to evaluate the effectiveness of each actuator. Three actuators are
evaluated in this work: actuator 1 is a typical fluidic oscillator (shown in Figure 6.1),
actuator 2 is a similar fluidic oscillator with a narrow exit angle (Figure 6.2), and actuator
3 is a steady jet with a throat width the same size as the fluidic oscillators (Figure 6.3).
The actuators are mounted just upstream of the front edge of the cavity, and oriented such
that the blowing is upwards into the shear layer. The aim of this actuation technique is to
reduce the cavity tones by modifying the shear layer. The actuation will alter the stability
characteristics of the shear layer, as well as potentially alter the impingement location of
the shear layer on the downstream cavity wall.

89
Figure 6.1: Geometry of actuator 1, a wide-angle fluidic oscillator.
Figure 6.2: Geometry of actuator 2, a narrow-angle fluidic oscillator.
Figure 6.3: Geometry of actuator 3, a converging nozzle for steady blowing.

90
6.2 Experimental Setup
The experimental facility used for these experiments is a blow-down jet with adjacent
cavity, located in Raman’s laboratory at the School of Mechanical, Materials, and
Aerospace Engineering at the Illinois Institute of Technology. The jet and cavity
arrangement are shown in Figure 6.4. The jet exit area is 1-in2, and arranged such that
the jet width more than covers the cavity width. The subject cavity is 0.5-in deep, 0.75-
in. wide, and 2-in. long; giving an L/D of 4 and an L/W of 2.67. Each actuator was
placed 0.05-in. upstream of the cavity, with the nozzle ejecting flow upwards into the
main jet flow and centered on the jet centerline. The nozzle width of each actuator was
0.04-in. and the depth of the two-dimensional actuators was 0.024-in.
Figure 6.4: Jet-cavity facility at the Illinois Institute of Technology.
A B&K microphone (Type 2670) was used to quantify the effectiveness of the three
actuators for cavity tone suppression. The microphone was mounted 6.5 inches above the
floor of the cavity, 2.8 inches downstream of the jet exit, and on the horizontal centerline
of the jet. The microphone was located outside the freestream of the jet, and faced
Cavity
Jet Actuator Location

91
downstream. The front face of the plenum was covered with sound-absorbing material in
order to reduce reflections of the acoustic waves. The microphone was powered by a
B&K Type 2804 power supply / signal conditioner. The signal was high-pass filtered at
1 Hz and low-pass filtered at 100 kHz with an Ithaco analog filter. The microphone data
was digitized with a National Instruments BNC-2110 data acquisition system. Data was
acquired in LabVIEW at a 50 kHz sampling rate. Plenum pressure was recorded with a
Setra model 204 pressure transducer. The volume flow rate through the actuator was
measured with a Dwyer FT-137 rotameter, and the supply pressure was measured with a
Setra 204 pressure transducer. Ambient temperature was assumed throughout the system
for mass flow calculations.
6.3 Results
The three actuators were tested at various Mach numbers to evaluate their
effectiveness for cavity tone suppression. The mass flow rate for each actuator was set
approximately equal, to facilitate comparison between the actuators. The test cases
included Mach 0.5 and 0.7 for the primary jet flowing over the cavity. The test results
are summarized in Table 6.1 through Table 6.7 and Figure 6.5 through Figure 6.11.
Uncertainty in the measurement of mass flow rate is approximately ±10% and uncertainty
in sound pressure level is approximately ±0.5%. Percent mass flow is defined as the
control flow divided by the mass flow of the main jet, expressed as a percentage. The
blowing coefficient is defined as
inj injc
cavity
QB
V Aρ
ρ∞ ∞
= , 6.1
where Acavity is the area of the cavity (length times width), ρ is density, V is velocity, and
Qinj is the volume flow rate through the actuator. This blowing coefficient parameter is
the standard measure of actuator mass flow rate for cavity studies in freestream flow.75
The broadband sound-pressure-level (SPL) measured by the microphone increases as
the Mach number of the jet increases. The SPL of the peak tone also increases with
Mach number. The frequency of the cavity tone is 4.7 kHz for the Mach 0.5 jet. When
the Mach number is increased to 0.7, a second tone appears. The two tones, at 3.2 and

92
5.6 kHz, correspond to two simultaneous modes. At a Mach number of 0.9 there is only
one resonance present at 3.6 kHz.
The result of the fluidic injection is that the tonal magnitude is significantly
suppressed, and the broadband noise is typically lowered as well. The most significant
tonal suppression that was observed was with the wide-angle fluidic oscillator injecting
0.9% mass flow into the Mach 0.5 jet for a reduction of 17.0 dB. Other fluidic actuation
cases produced similar results, with typical mass flow rates on the order of 0.5% of the
main jet. It is remarkable that such a reduction of the cavity tone is possible with so little
mass injection.
Also noteworthy is the comparison between fluidic injection and steady blowing. For
approximately the same actuation mass flow rates, the wide-angle and narrow-angle
fluidic oscillators suppressed the cavity tone by 17.0 dB and 16.5 dB, respectively.
Steady blowing at the same mass flow rate, however, suppressed the cavity tone by only
1.6 dB. This highlights the efficiency of the fluidic oscillators for flow control. There is
no penalty for using a fluidic oscillator instead of steady actuation because there are no
moving parts. The only requirement is a higher supply pressure since the pressure drop
across the fluidic oscillator is somewhat higher. The difference between the wide-angle
and the narrow-angle fluidic oscillators is indiscernible from the current results. In some
cases, the wide-angle oscillator provides superior suppression. In other cases, however,
the narrow-angle oscillator performs better.
Table 6.1: Suppression results for Actuator 1 at Mach 0.5.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 110.8 – 121.6 – 0.204 0.102 98.8 12.0 119.1 2.5 0.897 0.449 93.8 17.0 118.8 2.8
Table 6.2: Suppression results for Actuator 1 at Mach 0.7.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 124.4 – 134.2 – 0.141 0.070 123.8 0.6 134.6 -0.3 0.622 0.311 116.8 7.6 131.2 3.0

93
Table 6.3: Suppression results for Actuator 1 at Mach 0.9.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 135.8 – 139.7 – 0.509 0.254 132.0 3.8 137.3 2.4
Table 6.4: Suppression results for Actuator 2 at Mach 0.5.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 110.1 – 121.3 – 0.188 0.094 94.7 15.4 119.2 2.1 0.860 0.430 93.5 16.5 119.1 2.2
Table 6.5: Suppression results for Actuator 2 at Mach 0.7.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 125.7 – 134.7 – 0.129 0.064 124.8 0.9 134.3 0.4 0.593 0.297 117.5 8.2 130.7 4.0
Table 6.6: Suppression results for Actuator 3 at Mach 0.5.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 110.3 – 121.6 – 0.168 0.084 107.3 3.0 120.2 1.4 0.827 0.414 108.7 1.6 121.1 0.4
Table 6.7: Suppression results for Actuator 3 at Mach 0.7.
Percent Mass Injection
Blowing Coefficient, Bc
Peak SPL (dB)
Suppression (dB)
Overall SPL (dB)
Suppression (dB)
Baseline Baseline 126.7 – 134.9 – 0.121 0.061 127.7 -1.0 135.2 -0.3 0.586 0.293 124.9 1.8 134.9 0.0

94
Figure 6.5: Suppression results for Actuator 1 (wide fan angle) at Mach 0.5.
Figure 6.6: Suppression results for Actuator 1 (wide fan angle) at Mach 0.7.
17.0 dB
7.6 dB

95
Figure 6.7: Suppression results for Actuator 1 (wide fan angle) at Mach 0.9.
Figure 6.8: Suppression results for Actuator 2 (narrow fan angle) at Mach 0.5.
3.8 dB
16.5 dB

96
Figure 6.9: Suppression results for Actuator 2 (narrow fan angle) at Mach 0.7.
Figure 6.10: Suppression results for Actuator 3 (steady blowing) at Mach 0.5.
8.2 dB
1.6 dB

97
Figure 6.11: Suppression results for Actuator 3 (steady blowing) at Mach 0.7.
6.4 Summary
Three different flow control actuators were evaluated in this work for their
effectiveness in cavity tone suppression. Two fluidic oscillators with wide and narrow
fan angles were tested, as well as a converging nozzle for steady blowing. The fluidic
oscillators provided far superior tone suppression when compared with steady blowing at
the same mass flow rate. Tone suppression of over 17.0 dB was achieved with
approximately 0.9% blowing mass flow at a main jet Mach number of 0.5. These results
demonstrate the utility and simplicity of fluidic oscillators for flow control applications.
1.8 dB

98
PART TWO: PRESSURE-SENSITIVE PAINT

99
CHAPTER 7: THE EFFECT OF QUENCHING KINETICS ON THE UNSTEADY RESPONSE OF PSP
Pressure-sensitive paints (PSP) have recently been extended to high-frequency
flowfields. Paint formulations have effectively been used to characterize pressure
fluctuations on the order of 100 kHz. As the limits of PSP are extended, various
experimental results indicate that the unsteady response characteristics are non-linear. A
thorough understanding of the photo-physical mechanisms in paint response is needed.
Gas transport properties, coupled with the non-linear nature of the Stern-Volmer
relationship have an effect on the paint response. This work discusses the full
implications of a diffusion-based model on the unsteady response of pressure-sensitive
paint. Based on this model, it is shown that the indicated pressure response of PSP is
faster for a decrease in pressure, and slower for a pressure increase. Effects of other
factors, such as pressure-jump magnitude, pressure-jump range, and Stern-Volmer non-
linearity, are evaluated. Furthermore, a fluidic oscillator is used to experimentally
demonstrate the quenching kinetics of two types of PSP – Polymer/Ceramic and Fast
FIB. Results from the oscillator operated with argon, nitrogen, and oxygen gases at 1.59
kHz demonstrate behavior that agrees with the diffusion model. The Polymer/Ceramic
PSP exhibited no delay between different test gases, indicating a flat frequency response
of at least 1.59 kHz. Fast FIB, on the other hand, demonstrated a significant delay in rise
time between the nitrogen and oxygen cases. Both the diffusion model and the
experimental results demonstrate that the different responses to nitrogen and oxygen only
become critical when the period of the flowfield oscillations is shorter than the response
time of the paint formulation.

100
7.1 Nomenclature
( )
0
2
Stern-Volmer calibration constant
Stern-Volmer calibration constant
gas concentration
reference gas concentration
diffusion coefficient, m / s
time-history of gas concentration at the paint
m
A
B
C
C
D
f t
μ
=
=
=
=
=
=
( )
( )
0
surface
normalized form of
first derivative of with respect to time
paint thickness, m
paint intensity
intensity per unit thickness
paint intensity in the absence of oxygen
paint
t
ref
g t f
g t g
h
I
I
I
I
μ
′ =
′ =
=
=
=
=
=
[ ]2
intensity at a reference condition
Stern-Volmer calibration constant
number of samples in a time-history
non-dimensional gas concentration
O oxygen concentration
pressure, Pa
non-dimensional pre
K
N
n
P
P
=
=
=
=
=
′ = ssure
reference pressure, Pa
heat of adsorption, J / mol
universal gas constant, 8.31447 J / mol-K
temperature, K
refP
Q
R
T
=
=
=
=

101
7.2 Introduction
Pressure-sensitive paint (PSP) has recently emerged as a powerful measurement tool
for global pressure distributions.42,43,79 PSP is an optical method for measuring surface
pressures based on the principle of oxygen quenching of a luminescent molecule.
Reviews by Bell et al.44 and Liu et al.45 have summarized the PSP technique and
common applications. Furthermore, Liu and Sullivan have written a recently-published
book which details the development and application of luminescent paints.46
Typical paints are composed of an oxygen-sensitive molecule known as the
luminophore, and a physical binder or matrix for the luminophore. Since luminophores
are available with very short lifetimes (~ 1 μs), the binder typically limits the frequency
response of the paint. Traditional polymer binders have response times as long as
seconds. The recent emergence of porous binders, however, has enabled measurements
( )
2
time, s
non-dimensional time,
substituted time variable
, solution of the diffusion equation
paint thickness coordinate measured from paint surface, m
non-dimensional thickness,
m
m
t
t tD h
u
W t z
z
z z h
μ
α
=
′ =
=
=
=
′ =
=
130
odal states
average phase delay
exponent for the Freundlich isotherm
eigenvalues
time constant, s
adsorption time, s
oscillation time of molecules in the adsorbed state, 1.6 10 s
frequenc
ads
φ
γ
λ
τ
τ
τ
ω
−
=
=
=
=
=
= ×
= y, Hz

102
of unsteady pressure fluctuations on the order of 100 kHz. Development of binders for
unsteady measurements has generally focused on improving the oxygen diffusivity within
the binder. Common binders in use today for unsteady measurements are thin-layer
chromatography plate53 (TLC-PSP), anodized aluminum48,50-52 (AA-PSP),
Polymer/Ceramic54,55 (PC-PSP), poly(TMSP)56,80,81 and Fast FIB.82 Thin-layer
chromatography plate is commonly used in chemistry laboratories and is composed of a
thin layer (~ 250 μm) of silica gel. The disadvantages of the thin-layer chromatography
plate are that it is fragile and limited to simple shapes. Anodized aluminum is created
through an electrochemical process by etching small pores (~ 10-nm diameter) on an
aluminum surface. The luminophore is deposited directly on the porous surface by
chemical and physical adsorption. Anodized aluminum is regarded as providing the
fastest PSP response times, but is limited by the choice of material and cannot be sprayed
onto a model. Polymer/ceramic PSP is a hybrid that uses a small amount of polymer with
a large amount of ceramic particles. The resulting aggregate is a highly porous surface
that allows for rapid diffusion. The primary advantage of Polymer/Ceramic PSP is that it
may be sprayed on a model, and offers reasonable response times. Poly(TMSP) is a
functional polymer with extremely high oxygen permeability. Its response is much faster
than most polymer binders, but still quite a bit slower than the new porous PSP
formulations. FIB (Fluoro / Isopropyl / Butyl) is a fluorinated co-polymer originally
developed at the University of Washington as an “ideal” paint. Fast FIB, essentially a
thin layer of FIB, has recently been developed by Innovative Scientific Solutions, Inc. for
unsteady measurements.
Dynamic calibrations with a shock tube51 and a fluidic oscillator38,40 have shown that
most porous PSP formulations have typical frequency responses in excess of 10 kHz.
Anodized aluminum PSP has been further developed and characterized by Kameda et
al.83 such that the reported response time is less than 10 μs. Unsteady pressure fields
such as the fluidic oscillator (22 kHz),40,41,84 a turbocharger compressor (10 kHz),41,85 or
the oscillating shock in a Hartmann tube (12 kHz)6 have been characterized. Some of
these experimental results41 apparently indicate that the dynamic response of PSP is non-
linear. These results have suggested that the response to an increase in oxygen

103
concentration may be slower than the response to a corresponding increase in nitrogen
concentration.
The purpose of this paper is to develop a model for the quenching dynamics of
pressure-sensitive paint. The implications of the model on the dynamic response of PSP
are discussed in detail. Furthermore, it will be shown that the diffusion-based model is
applicable to the recently-developed fast PSP formulations. Experimental results from
the fluidic oscillator will illustrate the effects of the quenching dynamics and will be
compared with the theoretical model.
7.3 Background
Polymer chemists have done a large amount of experimental and theoretical work on
the quenching kinetics of luminescent molecules immobilized in a polymer binder. It has
been known for quite some time that the luminescent response of a luminophore in a
polymer matrix is different for oxygen sorption or desorption experiments. Chemists
have used these observations along with simple diffusion models to determine the
diffusivity of a polymer film. The first known published work involving this method was
by MacCallum and Rudkin.86 These researchers applied a simplified form of this model
to the measurement of the oxygen diffusion coefficient in two polymer films. Cox and
Dunn87 also measured the oxygen diffusion coefficient via temporal fluorescence
quenching in a polymer. The films used by Cox and Dunn were 1-cm thick, resulting in
response times on the order of hours. They also demonstrated excellent agreement
between the diffusion model and experimental results. Carraway et al.88 discussed the
kinetics of quenching due to several possible models, including pure diffusion,
adsorption, and other combinations of models. Perhaps the clearest explanation of the
diffusion model and its interaction with the Stern-Volmer relation is given by Mills and
Chang.89 Subsequent researchers90-96 have used the diffusion modeling technique
extensively, and report a fast luminescent response to oxygen sorption, and a slower
response to oxygen desorption.
Within the field of PSP research, there has been some work done to model and
experimentally determine the dynamic response characteristics of pressure-sensitive

104
paints. Liu, et al.97 developed a phenomenological model describing the time constant
for paint response. They showed that the traditional square-law estimate for paint
response
2mh Dτ ∝ 7.1
is valid only for traditional polymer binders. Liu et al. derived a modified relation
2 frdmh Dτ −∝ 7.2
for highly porous surfaces, where dfr is the fractal dimension that represents the
complexity of the pore pathway. Furthermore, Liu et al. invoked the Fickian diffusion
model, lending credence to the current use of a diffusion model with porous paints.
Kameda et al.83 discuss gaseous transport in relation to the porous structure of anodized
aluminum PSP. They suggest that the diffusion model is valid for anodized aluminum
paints, but with a modified diffusion coefficient. Since the Knudsen number for
molecular motion within the porous structure is on the order of 1, Kameda et al. posited
that a modified diffusion coefficient is necessary because of Knudsen diffusion. This
effective diffusion coefficient varied with the pore diameter over a range from 10 to 100
nm, and with pressure. Schairer98 also employed a diffusion model in his analysis of
optimum thickness of a PSP layer, which he found to be a tradeoff between signal-to-
noise ratio and dynamic response. Carroll, et al.99 modeled the PSP step-response with a
diffusion-based model, and compared the response times of three different polymer-based
PSP formulations. Winslow, et al.100 developed both an empirical model as well as a
physics-based diffusion model, with the aim of developing a compensator. They applied
both a linear calibration and a Stern-Volmer calibration to the diffusion model and
showed that the Stern-Volmer calibration provides a better fit to the experimental data.
Winslow, et al. also briefly compared the predicted step response behavior of the Stern-
Volmer model to the linear model. Most recently, Drouillard and Linne101 applied the
diffusion-based model to luminescent lifetime measurements with pressure-sensitive
paint. They incorporated Beer’s law into their model to account for attenuation of light in
a paint layer that is not optically thin. When compared to experimental results, however,
optical thickness only appeared to be a relevant parameter at paint thicknesses greater

105
than 45 μm. Drouillard and Linne also quoted a value of mass diffusivity for Uni-FIB
paint of somewhere between 300 and 1000 μm2/s.
Although these models have shown the basic behavior of the quenching kinetics of
PSP, an exhaustive evaluation of the PSP dynamics is needed. The effects of factors such
as the pressure-jump magnitude, the range over which the jump occurs, and the direction
of the pressure jump need to be evaluated. This work demonstrates that not only the
paint thickness and diffusion coefficient, but also the expected pressure range, mean
pressure, and calibration coefficients are important factors in determining whether a PSP
formulation is suitable for a dynamic test.
7.4 Stern-Volmer Quenching Model
7.4.1 Model Development
Pressure-sensitive paint quenching kinetics may be modeled by the one-dimensional
diffusion equation, as others have done in the past.46,97-100 The following development is
a summary of the model, after the derivation of Liu and Sullivan.46 The response of the
PSP may be modeled by considering the diffusion of a test gas into or out of the binder.
It is assumed that the diffusion process, rather than the much faster luminophore
quenching process, controls the paint response characteristics. If the paint layer is thin
and uniform, the gas diffusion is assumed to be one-dimensional and Fickian,102
expressed as
2
2mC CDt z
∂ ∂=
∂ ∂ 7.3
where z is distance measured from the paint surface, as shown in Figure 7.1. Fickian
diffusion also assumes that there is no mass convection present in the flow. In addition,
the time scales of adsorption effects are assumed to be negligible relative to the diffusion
and unsteady pressure time scales. The effects of adsorption will be discussed in detail in
a later section. The boundary conditions for the diffusion equation are
( )00 at and at 0C z h C C f t zz
∂= = = =
∂ 7.4

106
where f(t) is a function that describes the time history of gas concentration at the paint
surface. The initial state of the paint layer is a uniform gas concentration throughout the
thickness. Thus the initial condition for the diffusion equation 7.3 is
( )0 0 at 0C C f t= = 7.5
z
z=hz=0
PS
P S
urfa
ce
Wal
l
z
z=hz=0
PS
P S
urfa
ce
Wal
l
Figure 7.1: Diagram of modeled PSP geometry.
In order to make the diffusion equation tractable for numerical solution, the following
non-dimensional variables are introduced
( ) ( )0
2
, 0
m
n t z C C fz z h
t tD h
′ ′ = −
′ =
′ =
7.6
The diffusion equation may then be rewritten as
2
2
n nt z∂ ∂
=′ ′∂ ∂
7.7
with boundary and initial conditions
( )0 at 1 and at 00 at 0
n z z n g t zn t
′ ′ ′ ′∂ ∂ = = = =
′= = 7.8
A function g(t') = f(t') – f(0) is used to satisfy the boundary condition at the paint surface.
This non-dimensional differential equation 7.7 is then solved with Laplace transforms.
When the boundary and initial conditions 7.8 are applied, a general convolution solution
is obtained for the non-dimensional gas concentration
( ) ( ) ( )0
, ,t
tn t z g t u W u z du′
′ ′ ′ ′= −∫ 7.9

107
The function ( )tg t is the derivative ( ) ttg ∂∂ , and ( ),W t z is defined as
( ) ( ) ( )0 0
1 2 1 2, 1 12 2
k k
k k
k z k zW t z erfc erfct t
∞ ∞
= =
⎛ ⎞ ⎛ ⎞+ − + += − + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∑ ∑ 7.10
For a step increase in gas concentration at the paint surface, the function gt is defined
as the delta function, ( ) ( )tg t tδ= , which gives
( ) ( ), ,n t z W t z′ ′ ′ ′= 7.11
from the convolution integral 7.9. Analogously, a step decrease in gas concentration is
given by
( ) ( ), ,n t z W t z′ ′ ′ ′= − 7.12
From Equations 7.11 and 7.12, it can be seen that there is no difference in the time scale
of diffusion, whether a gas is diffusing into or out of the paint binder. Gas concentration
profiles for several time steps of diffusion into and out of the paint binder are shown in
Figure 7.2. Each step in dimensionless time is given as a successive power of ten
according to
410 where 20 2Nt N′ = − ≤ ≤ 7.13
This diffusion process is independent of the particular gas species of interest.
Pressure-sensitive paint, however, is sensitive only to oxygen concentration. Thus,
oxygen diffusion will be the focus of the remainder of this discussion. The sensitivity of
PSP to oxygen is dictated by Stern-Volmer quenching behavior, which is an inherently
nonlinear relationship.103 The key to the difference in time scales of the PSP response is
in the characteristic non-linearity of the Stern-Volmer calibration curve. The Stern-
Volmer relation may be expressed as103
[ ]0 2
11
II K O
=+
7.14
where K is a constant if temperature is invariant.

108
(a)
(b)
Figure 7.2: Gas diffusion (a) into and (b) out of the paint layer.
Increasing Time
Increasing Time

109
The form of the Stern-Volmer equation typically used for PSP calibrations, given as
ref
ref
I PA BI P
= + 7.15
is obtained by taking the ratio of Equation 7.14 at two conditions – a reference and a test
condition. When Equation 7.14 is compared with the Stern-Volmer form used for PSP
calibrations 7.15, the value of K can be derived as
ref
AKB P
=⋅
7.16
since the concentration of oxygen in air is proportional to the air pressure. A variation of
Equation 7.15 is the Stern-Volmer relation following the Freundlich Isotherm, namely
ref
ref
I PA BI P
γ⎛ ⎞
= +⎜ ⎟⎜ ⎟⎝ ⎠
7.17
This calibration behavior is characteristic of porous PSP formulations, particularly
anodized aluminum PSP. Typical PSP calibration curves for γ = 1.0 and γ = 0.1 are
shown in Figure 7.3, with A = 0.9 and B = 0.1. In addition to these typical calibration
curves, experimental calibrations for the Fast FIB and Polymer/Ceramic formulations are
shown in the same figure. PSP calibration data is most often presented as intensity ratio
vs. pressure ratio, as shown in Figure 7.3. This format, however, does not intuitively
indicate the nonlinear nature of the Stern-Volmer relationship of Eq. 7.14. Therefore, the
same calibration data is shown in Figure 7.4, but with normalized intensity shown ( 0I I )
rather than intensity ratio ( refI I ). The highly non-linear nature of the Stern-Volmer
relationship is more readily apparent in this representation. The coupling of the nonlinear
intensity response with the diffusion of gas within the paint thickness is the primary
mechanism for the difference in rise and fall times of the paint response.

110
Figure 7.3: Typical calibration curves for various pressure-sensitive paint formulations.
Figure 7.4: PSP calibration data plotted to show the nonlinear Stern-Volmer intensity response.
111
For a given time after the step-change in oxygen concentration, there will be a
distribution of oxygen within the binder, governed by the diffusion relation 7.3.
Therefore, there will also be a variation in paint luminescence within the thickness of the
PSP binder, depending on the local oxygen concentration. In the current diffusion-based
model, an elemental intensity contribution throughout the paint thickness is determined
from the local oxygen concentration. This is determined by the Stern-Volmer
relationship, which models the physics of the luminophore intensity response to oxygen
concentration. Assuming an optically thin paint layer and a uniform distribution of
luminophore in the binder, the luminescent intensity can then be integrated over the
thickness of the paint,
( )0
( ) ,h
I t I t z dz= ∫ 7.18
to give the total luminescent intensity of the paint as a function of time.
7.4.2 Intensity Response
In order to discretize and solve the diffusion equations, a total of 1000 time steps
were used. In addition, the paint thickness was divided into 1000 elemental areas. The
summation in Equation 7.10 was carried out to 10 terms. These parameters are sufficient
to ensure convergence of the solution, and are greater than the values used by Winslow,
et al.100
The first case to be considered is a step-change in pressure from atmospheric
conditions down to vacuum, and back again. The intensity responses for the step-
increase and step-decrease are shown in Figure 7.5, along with the shape of the integrated
oxygen concentration time history. The intensity profiles have been normalized by
initial
final initial
I II
I I−
′ =−
7.19
to facilitate comparison of waveform shapes. The integrated intensity response to an
increase in pressure is much faster than the response to a decrease in pressure. If the
Stern-Volmer relationship between intensity and oxygen was linear, then the intensity

112
response for the rise and fall would both collapse to the oxygen concentration curve.
Since the Stern-Volmer relation is not linear, the rise and fall responses differ.
Figure 7.5: Integrated intensity response to step-changes in pressure, compared to oxygen concentration; A=0.9, B=0.1, γ=1.0.
7.4.3 Pressure Response
The final step in the simulation is to convert integrated paint intensity back to an
indicated pressure. This replicates the experimental procedure of acquiring paint
intensity data and calibrating the intensity ratio to an indicated pressure ratio. To
summarize, the key steps in the modeling procedure are detailed as follows. First, a step-
change in pressure is modeled at the paint surface. Oxygen concentration throughout the
paint thickness is calculated by the diffusion equation for each time step. The resulting
temporal and spatial distribution of oxygen is converted to intensity by the Stern-Volmer
relationship. The local intensity across the entire paint thickness is then integrated to
simulate the experimentally-observed intensity for each time step. This integrated
intensity is finally converted back to an indicated gas concentration (pressure) by again

113
applying the Stern-Volmer relationship. The result of the model simulation is the paint’s
indicated response to an arbitrary step-change in pressure.
When the intensity time-histories shown in Figure 7.5 are converted to pressure, the
shapes of the curves change such that the indicated pressure-response to a decrease in
pressure leads that of an increase in pressure. This result is shown in Figure 7.6, for the
same parameters used in the solution represented in Figure 7.5. The pressure step-
response curves have been normalized by
initial
final initial
P PP
P P−
′ =−
7.20
in a manner similar to the intensity step-response curves. The change in behavior
(contrasted with the intensity profiles) is due to the inversion process within the Stern-
Volmer relation. This result also highlights the importance of calibrating experimental
intensity results before drawing conclusions about the temporal response characteristics
of PSP. For both modeling and experimental work (even flow visualization), the
observed time history may be altered significantly if the intensity is not calibrated to
pressure or gas concentration.
The pressure response curves in Figure 7.6 are plotted against non-dimensional time,
2mtDtt
hτ′ = = . 7.21
Notice the effects that the paint thickness (h) and diffusion coefficient (Dm) have on the
step-response of the paint. A thinner paint sample will have a much faster response time.
Likewise, a paint binder with a high diffusion coefficient will also exhibit a faster
response time. Thus, the relative impact of the response differences to a step-increase or
step-decrease will depend on the diffusion coefficient and thickness of the paint sample
being implemented.
The effect of γ in the Freundlich Isotherm calibration 7.17 on the PSP response is also
evaluated. Figure 7.7 shows the results with A=0.9, B=0.1, and γ=1.0 or 0.1. The
Freundlich Isotherm does have some effect on the shape of the indicated pressure-time
history, although the effect is minimal. The basic trend remains the same – there is a fast
response to a step-decrease, and a slower response to a step-increase in pressure.
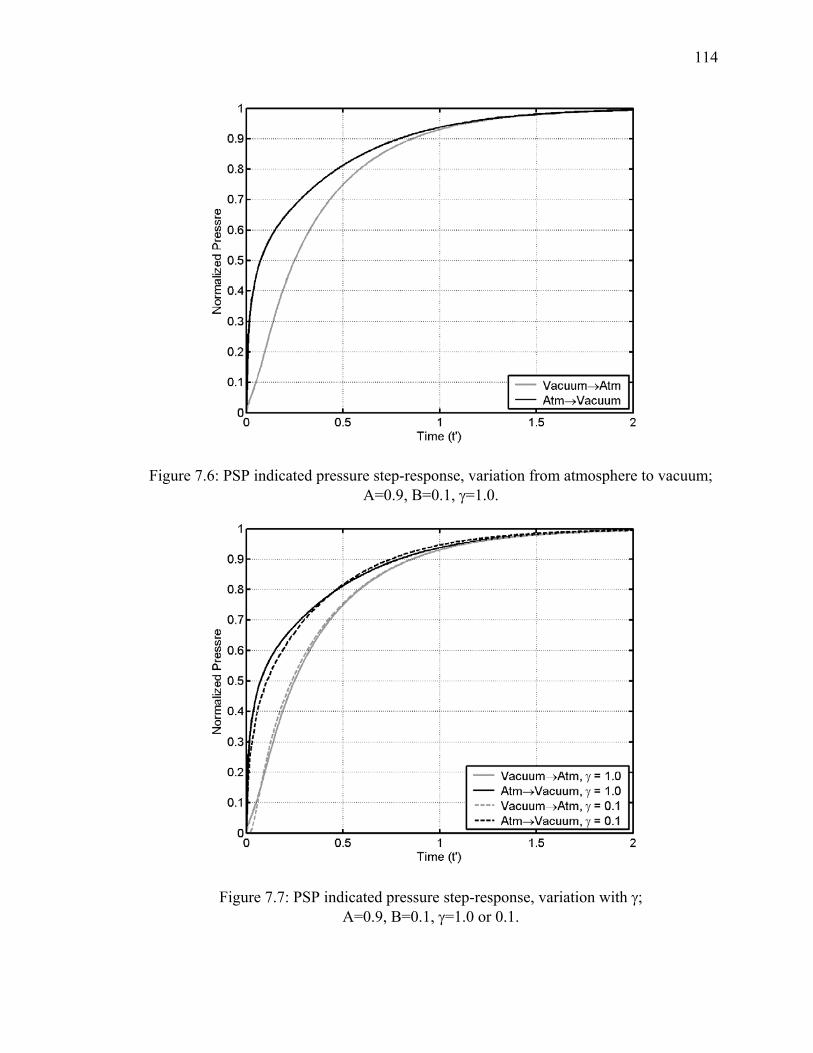
114
Figure 7.6: PSP indicated pressure step-response, variation from atmosphere to vacuum; A=0.9, B=0.1, γ=1.0.
Figure 7.7: PSP indicated pressure step-response, variation with γ; A=0.9, B=0.1, γ=1.0 or 0.1.

115
The effects of a small change in pressure are shown in Figure 7.8. For this case, a
change in pressure of 6.9 kPa above atmosphere was considered. As expected, a smaller
change in pressure produces a much smaller difference between the rise and fall in
indicated pressure. The reduced difference is due to a minimal nonlinearity in the smaller
portion of the Stern-Volmer curve that is traversed by the small pressure jump. The trend
remains the same, however – the response to a pressure decrease is faster than the
response to a pressure increase.
Figure 7.8: PSP indicated pressure step-response, variation with pressure jump magnitude; A=0.9, B=0.1, γ=1.0, ΔP=6.9 kPa.
The effect of the overall range of the pressure change is shown by comparing Figure
7.6 with Figure 7.9. Both cases have a pressure change of 101 kPa, but the first case is a
change to vacuum and back, while the second case is a change from 101 kPa to 202 kPa
and back. Note that the pressure change at lower pressures produces a greater difference
in the time scales of the indicated pressure than the case at higher pressures. The effect
of the mean pressure on the indicated pressure-jump response is due to the non-linear

116
nature of the Stern-Volmer curve. Figure 7.4 shows that the highly non-linear region of
the curve is focused at lower pressures, while the curve becomes more linear at high
pressures.
Figure 7.9: PSP indicated pressure step-response, variation from 101 kPa to 202 kPa; A=0.9, B=0.1, γ=1.0.
7.4.4 Frequency Response
The preceding step-response data was modeled for typical pressure-sensitive paint
calibrations. This data provides a foundational understanding of the diffusion and
quenching mechanisms responsible for the nonlinear response characteristics. The
following results extend the preceding data by incorporating experimental calibration
data for two PSP formulations, and generalizing the model to allow for an arbitrary input
for pressure time-history.
The present solution scheme remains the same as the previous derivation, except an
alternative method is employed for calculating the distribution of gas concentration
within the paint layer. The following results are based on the modal analysis technique

117
presented by Winslow et al.100 The system of equations to be solved for oxygen
concentration is given by
( ) ( ) ( ) ( )( )
2
0 00 0 0 2sin0 0
i i i i i
P tt t
P tα λ α λ λ⎛ ⎞ ⎡ ⎤ ⎛ ⎞ ⎡ ⎤
′ ′⎛ ⎞⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎢ ⎥′ ′= − + − ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎢ ⎥ ′ ′⎝ ⎠⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎢ ⎥⎝ ⎠ ⎣ ⎦ ⎝ ⎠ ⎣ ⎦
M O M M M
&&
M O M M M
7.22
( ) ( )( ) ( ) ( ) ( )( )
, cos 1 0i i
P tn x t x t
P tλ α
⎛ ⎞′ ′⎛ ⎞⎜ ⎟′ ′ ′ ′= + ⎜ ⎟⎜ ⎟ ′ ′⎝ ⎠⎜ ⎟
⎝ ⎠
M
L L &M
, 7.23
where P′ is the dimensionless input pressure waveform. Complete details of the
derivation of this system of equations are given by Winslow et al.100 Equations 7.22 and
7.23 were modeled with 200 steps through the paint thickness, 500 steps in time, and 100
wave numbers to provide the distribution of oxygen concentration throughout the paint
thickness for an arbitrary pressure time-history. The oxygen concentration is then
converted to intensity by a Stern-Volmer intensity calibration for the paint of interest.
The intensity is integrated over the paint thickness, and then converted back to an
indicated pressure by the same Stern-Volmer calibration for the subject paint.
In order to evaluate the response characteristics of actual paint formulations,
Equations 7.22 and 7.23 are solved for a sine wave over a range of frequencies and
experimental calibrations (Figure 7.3 and Figure 7.4) are used in the modeling process.
The responses of both Fast FIB and Polymer/Ceramic PSP are evaluated across a range of
frequencies, and compared with the response for a linear calibration. Two pressure
ranges were considered: from atmosphere to pure oxygen ([ ]2 1O = ), and from
atmosphere to pure nitrogen ([ ]2 0O = ), both varying in a sinusoidal fashion. Bode plots
for the Fast FIB results are shown in Figure 7.10. The asymptote for the linear
calibration response is -10 dB per decade, and the phase delay levels out at -45°. There is
a difference in the frequency roll-off characteristics between the nitrogen and oxygen
waveforms, however. Notice that the differences in response only become significant
when the flowfield frequency has exceeded the frequency response of the paint ( 1ωτ > ).
Table 7.1 summarizes the magnitude and phase delay characteristics shown in Figure
7.10. The magnitude attenuation is defined as

118
10
std( )Mag 20log
std( )output
input
PP
⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠ 7.24
and the average phase delay is defined as
( ) ( )1
1 arcsin arcsinN
i ioutput input
iP P
Nφ
=
⎡ ⎤= −⎣ ⎦∑ 7.25
since the output wave form is distorted through the nonlinear system.
The same flowfield inputs of nitrogen and oxygen sine waves were modeled for the
Polymer/Ceramic paint. Bode plots for these results are shown in Figure 7.11. The
nitrogen and oxygen responses are very similar, and relatively close to the linear
calibration roll-off of -10 dB per decade. The plateau in the phase delay also exhibits less
variation than the Fast FIB case. The reason for the diminished variation is because the
intensity response of the Polymer/Ceramic paint calibration is not as strongly non-linear
as the Fast FIB calibration, as shown in Figure 7.4.
Table 7.1: Frequency response characteristics.
Linear Calibration Fast FIB Polymer/Ceramic Magnitude
(dB/dec) Phase (deg.)
Magnitude(dB/dec)
Phase (deg.)
Magnitude (dB/dec)
Phase (deg.)
Nitrogen -10.0 -45 -9.37 -36 -9.90 -42 Oxygen -10.0 -45 -9.78 -41 -9.94 -44

119
(a)
(b)
Figure 7.10: Bode plots of (a) magnitude and (b) phase for the frequency response of Fast FIB PSP.

120
(a)
(b)
Figure 7.11: Bode plots of (a) magnitude and (b) phase for the frequency response of Polymer/Ceramic PSP.

121
7.4.5 Adsorption Effects
Some researchers have observed hysteresis effects in the paint response while
conducting PSP tests in a cryogenic wind tunnel.104 It has been suggested that this
observed hysteresis may be due to adsorption of gases on the porous PSP surface, and
could have implications on the unsteady response of porous pressure-sensitive paint. If a
significant quantity of nitrogen, oxygen, or some other gas adsorbs on the porous paint
surface, then the indicated intensity response of the paint may not be a true representation
of the local gas concentration. The luminophore molecules are typically adsorbed on the
paint surface (as in the case of anodized aluminum PSP105), and thus are primarily
responsive to any gas that may be adsorbed on the paint surface. If there are no gas
molecules adsorbed on the porous surface, then the luminophore responds primarily to
gas collisions. These two quenching mechanisms – adsorption-controlled and collision-
controlled – are discussed in more detail by Sakaue.106
Porous surfaces such as Zeolite X107 or anodized alumina surfaces108 are commonly
used in gas separation processes because the rates of adsorption differ between various
gas species. The affinity of a given gas species for adsorption on a particular surface is
given by the heat of sorption (Q). Published values for nitrogen, oxygen, and argon on
porous surfaces107 indicate that heats of sorption for nitrogen are typically 1.5 times the
values for oxygen or argon. The length of time that a gas molecule remains in contact
with a surface is called the adsorption time. deBoer109 gives a relation for the adsorption
time as
( )0 expads Q RTτ τ= 7.26
where 0τ is the oscillation time of molecules in the adsorbed state, a constant of about
131.6 10 sec−× . Thus, the adsorption time increases exponentially with the heat of
sorption. Since nitrogen typically has a higher heat of sorption for porous surfaces, the
adsorption time will be longer for nitrogen when compared to oxygen.
In relation to the present study, the primary question is whether this adsorption time is
large enough to affect the observed quenching behavior of the PSP. If one assumes
ambient conditions (298 K) and an aggressive value for the heat of sorption (28.8 kJ/mol
for Nitrogen on CaNaX-97107), the adsorption time is still only 18 ns. In order for the

122
adsorption time to be on the order of 1 ms at ambient conditions, the heat of sorption
must be approximately 56 kJ/mol. Now if a more conservative value for the heat of
sorption (15 kJ/mol) and cryogenic temperature (100 K) are assumed, then the adsorption
time is on the order of 10 μs. Thus, adsorption effects may become critical at cryogenic
temperatures with porous surfaces. For the present evaluation at ambient conditions,
however, adsorption effects are assumed negligible.
7.5 Experimental Results
The objective of the following work is to experimentally verify the results of the
diffusion model. It is difficult to experimentally demonstrate this non-linear quenching
behavior with fast paints because most dynamic calibration devices are limited by either
frequency response or pressure range. Calibration tools that have been commonly used
include shock tube facilities,51,56 solenoid valves,50,53,99,110,111 loudspeakers,112,113 siren
pressure generators,114 pulsating jets,115 and fluidic oscillators.40,84 The characteristics of
these calibration techniques are summarized in Table 7.2.
Table 7.2: Summary of dynamic calibration methods.
Method Δt Δp References Shock Tube 1 μs 101 kPa increase only Sakaue and Sullivan51,
Asai et al.56 Solenoid Valve
1 ms 101 kPa increase / decrease
Carroll et al.99, Baron et al.53, Asai et al.48,50,111, Fonov et al.110
Loudspeaker 10 μs 1.2 kPa sinusoidal Jordan et al.112 Boerrigter and Charbonnier113
Siren Pressure Generator
100 μs 60 kPa sinusoidal Davis and Zasimowich114
Pulsating Jet 667 μs 250 kPa increase / decrease
Sakamura et al.115
Fluidic Oscillator
50 μs 101 kPa increase / decrease
Gregory et al.40,84
These calibration methods have various limitations. Loudspeakers typically have a
frequency response on the order of a few hundred kilohertz, but it is difficult to generate
pressure waves with large enough amplitude for a useful calibration. Solenoid valves are
quite common and can generate a step change in pressure, but are plagued by ringing and
123
a response time that is not fast enough to characterize porous PSP formulations. Shock
tube facilities are most common for calibrating transducer response, but can only
generate a step increase in pressure. Modulated jets can provide a pressure increase and
decrease, but typically are not fast enough to calibrate fast paints.
The ideal calibration tool for demonstrating the quenching kinetics of PSP must have
a frequency that is much faster than the expected response of the paint. Ideally, this
frequency should be arbitrarily specified and independent of pressure. Furthermore, the
ideal calibrator should generate arbitrary pressure ranges, mean pressures, and pressure
jump direction. Such a device is not currently available, but the fluidic oscillator
approaches this ideal calibrator.
7.5.1 Fluidic Oscillator
In order to experimentally evaluate the quenching kinetics of porous PSP, a fluidic
oscillator is used. The unsteady flow of the oscillator is suitable for making dynamic
measurements. The fluidic oscillator used in these experiments is one that produces a
square-wave flow pattern. This is the same identical oscillator that has been
characterized by Gregory, et al.40 and Raman and Raghu77 in the past. The flow pattern
of the oscillator is bimodal, as shown in the previous work. This device is used for
characterizing the unsteady response of PSP because it has a very fast rise time, and the
entire oscillation cycle is on the order of 629 μs long.
The rise time of the PSP response to the issuing jet can be compared when the
oscillator is operated with different test gases. Argon, nitrogen, and oxygen are all used
in the current experiments. Argon and nitrogen will both purge the oxygen in the PSP,
simulating a pressure decrease to vacuum conditions. The oxygen will have the opposite
quenching behavior, with the luminophore being nearly quenched under the presence of
pure oxygen. The pure oxygen condition simulates a large pressure increase, up to 482
kPa. If the fluid dynamic behavior of the oscillator is independent of the test gas used,
then the PSP response to these three cases may be compared and the response behavior
evaluated. Commonality of fluid dynamics among the test gases cannot be immediately
assumed, however. Each gas has a different molecular weight, and a different speed of

124
sound.59 Because of this, the supply pressure required of each gas to generate a given
oscillation frequency varies somewhat. To evaluate the flow commonality, a hot-film
probe was placed in the fluidic oscillator flowfield, and subjected to flow from air, argon,
nitrogen, and oxygen. The pressure for each gas was adjusted such that the measured
frequency was 1.83 kHz. The normalized time history from each of these gases is shown
in Figure 7.12. Despite differences in supply pressure, the normalized waveforms have
collapsed into one shape. The absence of waveform distortion indicates that the oscillator
may be used with different test gases to evaluate the PSP response.
Figure 7.12: Hot-film probe characterization of fluidic oscillator flow with various gases.
The quenching kinetics of two paint formulations was evaluated – Fast FIB and
Polymer/Ceramic PSP. The response time of Fast FIB is about 1 ms – on the same order
of magnitude as the oscillation period of the fluidic oscillator. On the other hand, the
response time of the Polymer/Ceramic PSP is less than 25 μs, much faster than the
characteristic time scale of the fluidic oscillator flowfield. The Polymer/Ceramic PSP
sample was prepared with tris(bathophenanthroline) ruthenium dichloride (RuBpp) as the

125
luminophore, while the Fast FIB sample employed platinum
tetra(pentafluorophenyl)porphine (PtTFPP). Calibration data for the two paint
formulations are shown in Figure 7.3. The thicknesses of the paint samples were
measured with a profilometer – the Polymer/Ceramic was 73 μm thick, and the Fast FIB
was on the order of 1 μm thick (near the uncertainty limit of the profilometer).
Polymer/Ceramic paint samples are not usually as thick as the subject sample. A thick
sample was chosen because the diffusion coefficient of porous paints is known to be very
high. The aim of this selection is to offset the high diffusion coefficient with a large
thickness-squared term in Equation 7.1, such that the response time of the paint will
approach the time scale of the flowfield.
The experimental setup for the fluidic oscillator is shown in Figure 7.13. The paint
samples were mounted parallel to and at the edge of the jet exit. The supply gases were
argon, nitrogen, or oxygen – all three were set at a pressure such that the oscillation
frequency was maintained constant at 1.59 kHz. The corresponding gauge supply
pressures were 40.4 kPa for argon, 26.3 kPa for nitrogen, and 31.0 kPa for oxygen.
Figure 7.13: Experimental setup for fluidic oscillator dynamic calibrations.

126
A Kulite pressure transducer was positioned adjacent to the oscillator to provide a
reference signal for triggering and phase-locking. The Kulite signal was low-pass filtered
at 2 kHz and high-pass filtered at 1 kHz to eliminate all but the primary frequency
component. This filtered signal was sent to an oscilloscope with a gating function and
trigger output. The TTL output from the oscilloscope was used to phase lock the LED
illumination with the oscillation frequency. Successive delays within the oscillation
period were set with a pulse / delay generator. The pulse width was set to 15.723 μs
(2.5% of the oscillation period), and the successive delays were set at 31.446 μs intervals
for 20 equal steps throughout the cycle.
A 14-bit CCD camera was used with an f/2.8 macro lens for imaging. An ISSI blue
LED array (465 nm) was used for excitation of the Polymer/Ceramic PSP, and a violet
LED array (405 nm) was used for the Fast FIB PSP. A long-pass colored glass filter (590
nm) eliminated the excitation light from the image, leaving only the paint luminescence.
The camera shutter was set open for a long period to integrate enough light, while the
LED array was strobed to freeze and phase-average the oscillatory motion. The exposure
time for the Polymer/Ceramic paint was 60 ms because it is a very bright paint, while the
Fast FIB paint required an exposure time of 2.5 sec.
Acquired intensity images were converted to gas concentration levels through a priori
paint calibrations (Figure 7.3). Each paint sample was calibrated from vacuum up to
100% oxygen at atmospheric pressure. This calibration range corresponds to a variation
in pressure from vacuum to 482 kPa. In the data reduction process, an intensity ratio of a
wind-off and wind-on image was computed. In order to eliminate any bias error due to
temporal light variation, the intensity ratio was normalized by a point on the PSP known
to be at atmospheric conditions. Finally, the intensity ratio was spatially filtered with a 3-
pixel square window.
In the current PSP tests, any experimental errors are predominantly due to random
shot noise on the CCD array and bias errors in the a priori calibration. Errors due to the
temperature-sensitivity of PSP are considered negligible, and any cooling due to the jet
flow is the same for all three test gases. Random shot noise error is estimated to be
±0.2%, and all bias errors are estimated to be ±3%.

127
7.5.2 Results
Typical full-field PSP images of the fluidic oscillator, in response to argon gas, are
shown in Figure 7.14 for Polymer/Ceramic PSP. Corresponding results for the paint
response to oxygen gas are shown in Figure 7.15. Full-field results for the nitrogen gas
are fairly identical to the argon data, since both gases purge away oxygen and cause the
paint luminescence to increase. The nitrogen and argon jets thus simulate a decrease in
pressure down to a vacuum (a change in 101 kPa). The oxygen jet, on the other hand,
serves to quench the paint luminescence and simulates a change in pressure from
atmospheric conditions up to 482 kPa for 100% oxygen.
The data shown in Figure 7.14 and Figure 7.15 represents an oscillation frequency of
1.59 kHz (629 μs period) at a supply pressure of 40.4 kPa for argon and 31.0 kPa for
oxygen. Notice that the jet switches between left and right extrema in the oscillation
process. This particular oscillator generates a square waveform, with the jet pulsing
between the left and right outputs. These PSP measurements compare well with the
water visualization performed by Raman and Raghu77 on the exact same oscillator. The
distributions of gas concentration for the two cases are very similar. The primary
difference is the scaling of the data: the argon jet purges oxygen and sends the value
towards zero, but the oxygen jet increases the value towards unity.
A wealth of information is available from the PSP measurements since the data is
phase-locked with images taken throughout the oscillation period. Each pixel location in
the data set represents an individual phase-averaged time history of the paint response.
This array of time histories throughout the fluidic oscillator flowfield may be compared
between the three test gases. In order to verify the diffusion-based model for these fast
paints, the time history at the same point in the flowfield is examined for all three gases.
If there is no difference between the time histories for each gas, then either the paint is so
fast that quenching kinetics are negligible, or the diffusion model is insufficient. If, on
the other hand, there is a difference in response between the gases, then the effects of the
modeled response may be evaluated. Recall that the diffusion model predicts that the
response of PSP to a step-decrease in pressure will be faster than the step-increase

128
response. If the diffusion model is applicable to these tests, then the PSP response to
nitrogen or argon is expected to be faster than the oxygen response.
(a)
(b)
Figure 7.14: Polymer/ceramic PSP response to the argon jet at a) 0 μs and b) 314 μs (180° delay), at an oscillation frequency of 1.59 kHz.

129
(a)
(b)
Figure 7.15: Polymer/ceramic PSP response to the oxygen jet at a) 0 μs and b) 314 μs (180° delay), at an oscillation frequency of 1.59 kHz.

130
Comparisons of the Polymer/Ceramic PSP response to argon, nitrogen, and oxygen
are shown in Figure 7.16. These compiled time histories are phase-averaged and the gas-
concentration amplitude is normalized to a scale from 0 to 1. Unity represents complete
gas saturation, while zero represents atmospheric conditions. Within the experimental
uncertainty, Polymer/Ceramic exhibits no phase delay and no magnitude differences
between the responses to the argon, nitrogen, or oxygen jets. This indicates that the
Polymer/Ceramic formulation is able to respond to pressure fluctuations at 1.59 kHz and
a range of about 5 atmospheres with no frequency delay. This is noteworthy, considering
that the thickness of the paint sample is so high (73 μm). This data indicates that the
response time of the Polymer/Ceramic paint is faster than 629 μs, and that the diffusion
coefficient is greater than 8.4 × 106 μm2/s.
Figure 7.16: Polymer/ceramic PSP response to argon, nitrogen, and oxygen jets from the fluidic oscillator at 1.59 kHz.
Data for the response of Fast FIB paint to each of the gases is shown in Figure 7.17.
The measurement location is not in the same position in the flowfield as the

131
Polymer/Ceramic data in Figure 7.16, so the amplitudes of the two data sets do not
necessarily correlate. Note that the argon and nitrogen time histories in Figure 7.17
correlate well with one another, despite the difference in supply pressures. The response
to the oxygen jet, however, never reaches the full magnitude that the nitrogen or argon
jets achieve. Furthermore, the oxygen rise time is delayed relative to the argon and
nitrogen responses, but exhibits a faster decay time. These properties indicate that the
PSP response to the oxygen jet is quite slow relative to the argon or nitrogen jet
responses. This behavior agrees quite well with the predicted response from the diffusion
model. Even though the Fast FIB is an extremely thin layer, it is not suitable for tests at
this extreme frequency and pressure range. The Fast FIB formulation may be entirely
suitable for tests at slightly lower frequency and with smaller pressure changes. This
highlights the importance of evaluating not only the thickness and diffusivity
characteristics of the paint, but also the expected pressure ranges that will be measured
when estimating the suitability of a paint formulation for a particular test.
Figure 7.17: Fast FIB response to argon, nitrogen, and oxygen jets from the fluidic oscillator at 1.59 kHz.

132
A quantitative comparison between the model predictions and the Fast FIB
experimental results is shown in Figure 7.18. Here the input to the diffusion model is the
hot-film probe data shown in Figure 7.12, with the amplitude being arbitrarily scaled to
provide the best fit. The predicted response from the diffusion model compares quite
well with the measured experimental results for the nitrogen and oxygen jets. The value
of the diffusion coefficient was varied until the best fit was achieved between the model
and the experimental results, giving a value of 633 μm2/s. The RMS error for this fit is
1.6% gas concentration for the nitrogen jet, and 1.1% gas concentration for the nitrogen
get. The value of diffusion coefficient measured by these experiments compares well
with the quoted values of Winslow et al.100 (660 μm2/s) for a polymer-based binder with
ruthenium, and the estimated values of Drouillard and Linne101 (300 – 1000 μm2/s) for
Uni-FIB paint. Since the thickness of the subject Fast FIB paint sample is approximately
1 μm, Eq. 7.1 yields a time constant for the paint sample of 1.6 ms. This experimental
data falls at the point 0.410ωτ = on the Bode plot in Figure 7.10.
Figure 7.18: Comparison of diffusion model with experimental results for nitrogen and oxygen jets.

133
7.6 Summary
This work has shown through modeling and experiments that the unsteady response
of pressure-sensitive paint is affected by the non-linear nature of the Stern-Volmer
calibration. A calibration that is highly non-linear will cause the paint to respond quickly
to a decrease in oxygen concentration (pressure decrease), and relatively slowly to
oxygen sorption (pressure increase). In addition, it has been shown that this observed
affect is more pronounced for larger changes in pressure, particularly if the pressure
change covers the non-linear portion of the Stern-Volmer curve at low pressures. The
effect of the Freundlich isotherm on the Stern-Volmer relationship produced a minimal
variation from the quenching effects of the basic Stern-Volmer relation. Ultimately, it
was found that these nonlinear effects only become significant when the characteristic
time scale of the flowfield is faster than the response time of the paint.
The unsteady flowfield of a fluidic oscillator was used to verify the model predictions
and evaluate the response characteristics of two paint formulations. Experimental results
with Polymer/Ceramic PSP demonstrated no frequency roll-off at 1.59 kHz, indicating
that the diffusion coefficient is at least 8.4 × 106 μm2/s. Results with the Fast FIB paint
formulation did demonstrate the non-linear response characteristics predicted by the
diffusion model. The Fast FIB results indicated a much slower response to an increase in
oxygen when compared to argon or nitrogen at the same conditions. A quantitative
comparison between the Fast FIB results and the diffusion model showed good
agreement, and yielded a diffusion coefficient of 633 μm2/s and a time constant of 1.6 ms
for the 1-μm-thick Fast FIB paint.
134
CHAPTER 8: PRESSURE-SENSITIVE PAINT AS A DISTRIBUTED OPTICAL MICROPHONE ARRAY
Pressure-sensitive paint (PSP) is presented and evaluated in this chapter as a
quantitative technique for measurement of acoustic pressure fluctuations. This work is
the culmination of advances in paint technology which enable unsteady measurements of
fluctuations over 10 kHz at pressure levels as low as 125 dB. Pressure-sensitive paint
may be thought of as a nano-scale array of optical microphones with a spatial resolution
limited primarily by the resolution of the imaging device. Thus, pressure-sensitive paint
is a powerful tool for making high-amplitude sound pressure measurements. In this
work, the paint was used to record ensemble-averaged, time-resolved, quantitative
measurements of two-dimensional mode shapes in an acoustic resonance cavity. A wall-
mounted speaker generated nonlinear, standing acoustic waves in a rigid enclosure
measuring 216 mm wide, 169 mm high, and 102 mm deep. The paint recorded the
acoustic surface pressures of the (1,1,0) mode shape at ~1.3 kHz and a sound pressure
level of 145.4 dB. Results from the paint are compared with data from a Kulite pressure
transducer, and with linear acoustic theory. The paint may be used as a diagnostic
technique for ultrasonic tests where high spatial resolution is essential, or in nonlinear
acoustic applications such as shock tubes.
8.1 Introduction
Within the field of nonlinear acoustics and aeroacoustics there is a significant need
for a measurement tool such as pressure-sensitive paint. Major NASA initiatives, such as
the Quiet Aircraft Technology (QAT) program, will benefit from the development of PSP
for acoustics measurements. One of the major research goals of the Quiet Aircraft
Technology program is to reduce jet engine noise. Rotor-stator interactions are a
significant source of broadband and tonal noise within turbofan engines, as shown in

135
Figure 8.1. As part of the QAT program, it is important to characterize these interactions,
which create unsteady pressure fluctuations. With current measurement technology,
however, researchers cannot generate a complete map of the surface pressures.
Measurements are limited to transducers at discrete points which must be mounted
without any a priori knowledge of the pressure field. Thus, the transducer locations may
miss significant features in the pressure field. Pressure-sensitive paint is an ideal
candidate to fill in the gaps between the point transducers. This work has developed
pressure-sensitive paint to a mature technology that may be used to characterize rotor-
stator interactions. The key accomplishments are extending the frequency response to
cover the entire audible range (~ 20 kHz), and developing data acquisition and reduction
techniques to enhance the signal-to-noise ratio. PSP will enable measurements that are
impossible with traditional point-measurement transducers. Pressure-sensitive paints can
provide a global perspective of the complex aerodynamic and acoustic interactions
involved in rotor-stator interaction.
Figure 8.1: Rotor-stator interaction in a turbofan engine.

136
When applied to acoustics measurements, pressure-sensitive paint may be thought of
as a distributed nano-scale array of optical microphones. Optical microphones are
transducers that modulate light in response to acoustic signals. Most prior instances of
optical microphone designs involve the use of some mechanical membrane to modulate
the light. Bilaniuk116 has classified optical microphone transduction techniques into three
categories – intensity modulating,117,118 polarization modulating,119 and phase
modulating.116 Often these optical microphones are interrogated through fiber optics.
The primary advantage of this type of setup is that electrical connections are not required,
allowing optical microphones to be used in harsh experimental environments. There are
some drawbacks to this type of microphone, however. The typical sensitivity of these
optical transducers is not as good as traditional microphones. Furthermore, the fiber-
optic interrogation bundle must be positioned close to the sensing membrane element,
and these devices are limited to point measurements.
Pressure-sensitive paint (PSP) is detailed in this article as an alternative form of
optical microphone. The paint is similar to optical microphones in that it modulates light
intensity in response to an acoustic signal. It is fundamentally different, however, in that
the paint does not have any mechanical membranes or moving parts. Instead, pressure-
sensitive paint modulates the light intensity through a repeatable chemical interaction of
the sensing layer with atmospheric oxygen. A photodetector such as a CCD camera or
photomultiplier tube (PMT) is employed for interrogation of the paint. Since the paint is
composed of nano-scale chemical sensors, the microphone spatial density is quite high.
Thus, pressure-sensitive paint serves as a nano-distributed optical microphone array with
a spatial resolution limited only by the pixel resolution of the photodetector. The high
spatial resolution and fast response allows the paint to be used for high-frequency
applications where the characteristic wavelengths are small.
McGraw et al.120 recently demonstrated pressure-sensitive paint as a form of optical
microphone. They calibrated the paint for intensity and frequency response, and
measured acoustic pressure fluctuations in a standing-wave tube. McGraw’s paint
formulation involved a chemical sensor of platinum tetra(pentafluorophenyl)porphine
(PtTFPP) mixed with a polymer and applied to thin-layer chromatography (TLC) plate.

137
With this formulation they resolved pressure fluctuations as low as 6 Pa in a frequency
range of 150 to 1300 Hz. Their measurements, however, were limited to the end plate a
one-dimensional standing wave tube where light intensity was integrated over a large
area. By integrating light over a large area they were able to improve the signal-to-noise
ratio of their measurements, but sacrificed the ability to make two-dimensional
measurements. One of the characteristic advantages of pressure-sensitive paint is the
ability to make two-dimensional measurements with high spatial resolution. Sakaue has
also demonstrated acoustic measurements with pressure-sensitive paint.121 He developed
a paint formulation incorporating PtTFPP deposited on an anodized aluminum surface.
Sakaue’s measurements were also in a one-dimensional standing-wave tube, although the
PSP was positioned along the length of the tube. His data was recorded at very acoustic
high pressures, on the order of 172 dB.
When used as a distributed optical microphone array, pressure-sensitive paint can
provide quantitative mode-shape visualization data. Previous methods for determining
acoustic mode shapes have been either qualitative or quantitative methods. Galaitsis
developed a qualitative visualization method based on the refraction of light through
water.122 His experiments involved a rectangular cavity partially-filled with water. The
standing waves inside the cavity deformed the water such that a time-averaged image of
the mode shape could be recorded by the varying refraction of light passing through the
water. Chinnery et al. have recently employed schlieren imaging techniques for the
visualization of mode shapes in cylindrical cavities at ultrasonic frequencies.123
Quantitative methods for determining mode shapes have required microphone
measurements. Either a large array of microphones is required, or more commonly, a
small array that can be traversed throughout the region of interest. Smith suggested the
use of microphone measurements at multiple locations within an enclosure.124 He
computed the transfer function between signals from multiple microphones at different
locations in order to determine the mode shape. Nieter and Singh developed a concept
whereby the transfer function between a driving speaker and multiple microphone
measurements was used to calculate the mode shape.125 Their experiments used a
traversing microphone within a cylindrical resonance cavity, with the results showing

138
good agreement with linear acoustic theory. In subsequent work, Kung and Singh
determined mode shapes in three-dimensional cavities through microphone
measurements on the cavity boundary.126 Knittel and Oswald,127 as well as Whear and
Morrey,128 developed a technique using an array of two or three microphones to calculate
a time-resolved spatial derivative of pressure. They coupled this information with
accelerometer data for the loudspeaker cone to determine the mode shapes using
structural modal analysis software.
In the current work a rigid, rectangular cavity excited by a single-frequency sound
source was chosen as a benchmark application for evaluating the capabilities of PSP for
acoustics measurements. The advantage of the rectangular enclosure is that the pressure
field is well-known from linear acoustic theory.129 Furthermore, high-amplitude pressure
waves may be generated through resonant amplification, enabling the use of a relatively
low-power compression driver to generate measurable pressures. The cavity used in this
work was originally developed and used for acoustic shaping experiments in
microgravity, where acoustic radiation forces were used to collect particles into desired
surfaces.130 Theoretical131 and numerical132 solutions are available for high-amplitude,
non-linear wall pressures in resonant enclosures, but an experimental technique specific
to this cavity is needed. Thus, pressure-sensitive paint was used to verify the surface
pressure distribution in a rigid enclosure.
8.2 Paint Development
8.2.1 Characteristics of Pressure-Sensitive Paint
Pressure-sensitive paint is an oxygen-sensitive optical measurement technique,
traditionally developed for aerodynamics applications.44,46 The oxygen-sensing
molecule, known as the luminophore, interacts with oxygen atoms in the test gas in a
reversible process that alters the luminescent intensity of the paint. Since oxygen
concentration is proportional to air pressure, the oxygen sensor forms the basis for a
pressure-sensitive paint.

139
In a typical pressure-sensitive paint test, the luminophore molecules are excited to a
heightened energy state by illuminating the paint with light of a specific wavelength.
This light is best tuned to the absorption spectrum of the paint, and is typically in the
ultraviolet to blue range of the spectrum. Before excitation, electrons of the luminophore
molecule are in the ground state. When the paint is illuminated, photons are absorbed by
the luminophore molecules and the luminophore electrons are elevated to a heightened
vibrational state. These electrons in the higher state can release their energy through
several mechanisms which return the energy of the molecule back to its ground state. For
pressure-sensitive paint applications, the relevant and dominant energy transfer
mechanisms are oxygen quenching, phosphorescence, and radiationless decay. For
quasi-steady quenching, these mechanisms are denoted by the rate constants kQ, kP, and
kNR, respectively. Oxygen quenching occurs when oxygen molecules in the test gas
collide with the activated luminophore molecules. An energy transfer occurs from the
luminophore to the oxygen, as the oxygen is easily elevated to a heightened energy state.
The oxygen molecules subsequently release this energy through long-wavelength infrared
radiation or vibrational relaxation. Phosphorescence of the luminophore (also referred to
as luminescence) is the radiative release of energy at a longer wavelength than the
excitation light. Nonradiative transfer of energy involves an inter-system transfer from
the triplet state to the singlet state, and subsequent vibrational relaxation. Thus, the
primary physical mechanisms of energy transfer of interest in pressure-sensitive paint
applications are phosphorescence and oxygen quenching. Oxygen quenching is related to
the local acoustic pressure, while phosphorescence is measured by photodetectors.
The luminescent intensity of a pressure-sensitive paint (I) may be expressed as a first-
order differential equation,44
( )PdI I k a tdt τ
+ = Φ , 8.1
where Φ is the phosphorescence quantum yield (the fraction of absorbed photons that
produces phosphorescence), and a(t) is the rate of absorption of photons by the
luminophore. The luminescent lifetime τ is given by

140
1
NR P Qk k kτ =
+ +, 8.2
and the quenching constant is related to the local oxygen concentration [O2] by
[ ]2Q Qk Oκ= , 8.3
where Qκ is the quenching rate constant. Thus, the quasi-steady form of Eq. 8.1 is given
by
[ ]2
PP
NR P Q
k aI k a
k k Oτ
κΦ
= Φ =+ +
. 8.4
An intensity ratio may be obtained when Eq. 8.4 is expressed as a ratio between the test
condition and vacuum conditions (the complete absence of oxygen):
[ ] [ ]20
21NR P QSV
NR P
k k OIK O
I k kκ+ +
= = ++
. 8.5
Here the subscript 0 indicates vacuum conditions, and KSV is the Stern-Volmer
constant.103 Equation 8.5 expresses the essence of the pressure-sensitive paint technique:
measured light intensity from the paint is inversely proportional to the oxygen
concentration.
In practical applications it is often infeasible to use vacuum as a reference condition
(I0). Thus, an arbitrary reference condition (Iref) is often used by taking the ratio of Eq.
8.5 at the test condition and a practical reference point such as atmospheric conditions.
This yields the Stern-Volmer relation,
ref
ref
I PA BI P
= + , 8.6
which is common in aerodynamic applications of pressure-sensitive paint. Here the
oxygen concentration [O2] has been replaced by pressure P since the concentration of
oxygen in atmosphere is constant at 21%. A and B are the Stern-Volmer calibration
coefficients, which are typically sensitive to temperature.
141
8.2.2 Morphology
Conventional pressure-sensitive paint formulations are composed of oxygen-sensitive
luminophore molecules embedded in a polymer matrix. The polymer serves as a
mechanical binder to hold the luminophore to the model of interest. The properties of
most polymers inhibit the diffusion of oxygen within the binder and delay quenching of
the luminophore. Sakaue et al. have shown that the response time of conventional paint
formulations can be as long as a few seconds.38 These slow response characteristics
preclude the use of traditional paint formulations for acoustic measurements. Therefore,
a new morphology has been developed to enable rapid response times.
The time response of paint formulations may be modeled by one-dimensional
diffusion of a gas through the polymer binder. The relevant parameters controlling the
response time τresp are given by51,133
2
resphD
τ ∝ , 8.7
where h is the paint thickness and D is the gas diffusion constant for the binder.
According to Eq. 8.7, the time response of pressure-sensitive paints may be improved by
reducing the paint thickness or by increasing the diffusivity of the binder matrix. As the
paint thickness is decreased, the amount of light emitted by the paint also decreases with
a concomitant decrease in signal-to-noise ratio. Also, the gas diffusion constant of many
polymers is so low that even very thin paint films will still exhibit unacceptably slow
response times. Thus, a decrease in paint thickness is not an ideal solution for optimizing
the paint response. A better solution is to significantly increase the gas diffusion constant
of the matrix binder. This concept has led to a new class of pressure-sensitive paints
based on porous binders.
Porous pressure-sensitive paints are based upon a matrix structure that is porous and
relatively open to the test gas. The open structure allows for oxygen molecules to freely
move in and out of the binder by gas diffusion processes. Three types of porous binders
have recently been developed for aerodynamic testing: thin-layer chromatography plate,53
anodized aluminum,48,50,51 and polymer/ceramic.54,55 Thin-layer chromatography plate is
commonly used in chemistry laboratories and is composed of a thin layer (~ 250 μm) of

142
silica gel. The disadvantages of the thin-layer chromatography plate are that it is fragile
and limited to simple shapes. Anodized aluminum is created through an electrochemical
process by etching small pores (~ 10-nm diameter) on an aluminum surface. The
luminophore is deposited directly on the porous surface by chemical and physical
adsorption. Anodized aluminum provides the fastest paint response times, but is limited
by the choice of material and cannot be sprayed onto a model. Polymer/ceramic PSP is a
hybrid that uses a small amount of polymer with a large amount of ceramic particles, as
shown in Figure 8.2. The resulting aggregate is a highly porous surface that allows for
rapid diffusion of the test gas. The primary advantage of polymer/ceramic paint is that it
may be sprayed on a model, and offers reasonable response times.
Figure 8.2: Morphology of the polymer/ceramic pressure-sensitive paint formulation.
Polymer/ceramic was selected for the current investigation because of its robust
mechanical properties. The particular formulation created for acoustic testing is a water-
based paint that was sprayed on one wall of the cavity. A slurry mixture was prepared by
mixing 1.8 g of 0.4 μm rutile titanium dioxide (DuPont R-900) for every gram of distilled
water. In order to separate any TiO2 agglomerates, 12 mg of dispersant (Rohm & Haas
D-3021) was added for every gram of water. The resulting slurry mixture was ball-
milled for one hour to mechanically break up TiO2 agglomerates. The polymer (Rohm &
Haas B-1035) was then stirred into the slurry mixture at a 3.5% weight ratio. The
resulting polymer/ceramic formulation was then sprayed directly onto the test article.
The chemical sensor, known as the luminophore, is the active ingredient of the paint
formulation that is sensitive to local oxygen concentration. The luminophore selected for

143
these tests was Tris(Bathophenanthroline) Ruthenium Dichloride (GFS Chemicals, CAS
# 36309-88-3). This luminescent molecule was chosen because of its characteristically
fast lifetime – approximately 5 μs at atmospheric conditions.45 The luminophore was
dissolved in methanol, sprayed over the binder, and allowed to leach into the
polymer/ceramic structure.
8.2.3 Dynamic Response Characteristics
The polymer/ceramic paint morphology has been tailored to optimize the frequency
response characteristics of the paint. Before being applied to acoustic testing, however,
the response characteristics must be evaluated in some manner. The fluid-dynamic
flowfield of a fluidic oscillator was used to demonstrate the fast response characteristics
of these paints. The waveform of the oscillating jet approximates a square wave. As
such, the flowfield is rich in high-frequency content, and is ideal for calibrating the
frequency response of the paint sensor. The pressure field of the impinging fluidic jet is a
hydrodynamic pressure fluctuation, rather than an acoustic pressure fluctuation. The
pressure levels induced by the fluidic jet are much greater than typical sound pressures.
There is no expected difference in the frequency response characteristics of the paint due
to the excitation mechanism (i.e. hydrodynamic vs. acoustic) because the quenching
mechanism remains the same. Gregory and Sullivan133 have shown that large-amplitude
pressure fluctuations near the frequency response limit of the paint may induce a
nonlinear response. Low-level pressure fluctuations such as acoustic pressures typically
are not affected by the nonlinear response characteristics. Thus, it is presumed that the
response for acoustic pressures will be at least as fast as the hydrodynamic response.
In the dynamic calibration experiments, the paint was excited with a 404-nm diode
laser and the intensity response was recorded with a photomultiplier tube (PMT). The
paint response was compared with measurements from a collocated Kulite pressure
transducer. Power spectra of the two signals are shown in Figure 8.3. The 5.3-kHz
fundamental frequency from the fluidic oscillator is clearly shown as the dominant peak
in both the Kulite and pressure-sensitive paint power spectra. Higher-order harmonics
are visible up through the fourth harmonic for the Kulite and the third harmonic for the

144
PSP. Spurious harmonics at 2.7 kHz and 8.0 kHz are also present in the Kulite data, but
not in the pressure-sensitive paint data. This is an artifact of the large scale of the Kulite
(~2.5 mm) relative to the hydrodynamic jet diameter (~1.5 mm), while the diameter of
the laser spot for PSP is much smaller (~0.5 mm). Thus, the absence of these spurious
harmonics in the paint signal’s power spectrum is not due to a deficiency in the paint
response. The peak magnitudes in the paint spectrum correlate well to the Kulite peak
magnitudes, with the largest difference occurring at 10.5 kHz where the paint signal is
only 2 dB down from the Kulite response. The signal-to-noise ratio of the
instrumentation employed in these experiments was low, rendering the higher-frequency
content of the flowfield undetectable. The noise floor at -15 dB was higher than any
frequency component above 20 kHz. Thus, the paint’s frequency response is flat to at
least 15 kHz, and beyond this point the data is inconclusive because of the high noise
level in the paint measurements. These response characteristics are sufficient for the
current study, where the frequency of interest is on the order of 1.3 kHz.
Figure 8.3: Dynamic calibration of polymer/ceramic pressure-sensitive paint with a fluidic oscillator.

145
8.2.4 Sensitivity
The luminophore molecules employed in porous paint formulations exhibit a
nonlinear intensity response when subjected to a wide range of pressures, as shown in
Figure 8.4. The sensitivity is relatively high at very low ambient pressures, but the
response is less sensitive near atmospheric conditions. When the paint is subjected to
small pressure changes at atmospheric conditions, however, the response may be
considered linear and Eq. 8.6 serves as a good description of the intensity response. The
linear calibration coefficients at atmospheric conditions for the polymer/ceramic paint are
A = 0.791 and B = 0.209. The slope of the calibration curve (B) is somewhat lower than
the B = 0.66 sensitivity of the paint developed by McGraw et al.120 Note that this
diminished sensitivity is a consequence of the porous structure of the paint formulation
that enables fast response times. Despite having a lower sensitivity, the frequency
response of the polymer/ceramic paint formulation (≥ 15 kHz) is significantly greater
than the response of McGraw’s formulation (3.55 kHz).
Figure 8.4: Typical calibration of polymer/ceramic pressure-sensitive paint over a range from vacuum to two atmospheres.

146
The sensitivity of the paint formulation establishes a limit on the minimum detectable
pressure change that can be resolved by the system. This minimum level also depends on
the quality of the photodetector and digitizing equipment used for the measurements.
Pressure-sensitive paint measurements are inherently absolute, rather than AC-coupled.
The chemistry and optics of the system are unable to separate the pressure fluctuations
from the mean pressure. Thus, there is no way to offset the signals to remove the paint
response to the mean pressure before the signals are recorded. For example, a strong
acoustic signal with a pressure amplitude of 283 Pa (140 dB sound pressure level) and a
mean atmospheric pressure of 101.3 kPa produces a maximum pressure ratio of ±0.28%.
The intensity response of the polymer/ceramic paint to this pressure fluctuation is
±0.058%. If a 14-bit photodetection system is used to record this signal, the maximum
bit change that will be recorded is ±10 counts (out of a possible 16384!). The theoretical
minimum-detectable-limit can be estimated by assuming that a pressure change will
induce a single bit-flip on the photodetector system. A summary of these minimum
levels is presented in Table 8.1 for detectors with various resolutions. With a 16-bit
photodetector, the minimum detectable sound pressure level with the polymer/ceramic
paint is 108 dB. Further enhancements in the paint sensitivity can yield better results: if
the paint sensitivity is at the theoretical maximum of B = 1, and a 16-bit photodetector is
used, the minimum resolvable sound pressure level will be 95 dB.
The main challenge in using pressure-sensitive paint for acoustic measurements is
thus to resolve small intensity changes. Conversely, one advantage is that the paints do
not have a rated maximum pressure that can be resolved. Microphones and piezoresistive
pressure transducers have an upper pressure limit based on the mechanical properties of
the diaphragm. The burst pressure can limit the usefulness of these conventional
transducers for some nonlinear measurements.

147
Table 8.1: Theoretical minimum-detectable-level of pressure-sensitive paint.
Scroggin’s polymer/ceramic formulation54,55
(≥ 15 kHz response)
McGraw’s paint formulation120 (3.55 kHz response)
Photodetector Resolution
Minimum Pressure
Amplitude (Pa)
Minimum SPL (dB, ref 20 μPa)
Minimum Pressure
Amplitude (Pa)
Minimum SPL (dB, ref 20 μPa)
10 bit 473.8 144.5 150.0 134.5 12 bit 118.4 132.4 37.5 122.4 14 bit 29.6 120.4 9.4 110.4 16 bit 7.4 108.3 2.3 98.4
8.3 Experimental Setup
The experimental setup for the cavity pressure measurements is shown in Figure 8.5.
The cavity is made of 12.7 mm thick acrylic, with overall dimensions of 216 mm length
(Lx), 169 mm height (Ly) and 102 mm depth (Lz). The sound source used to drive the
oscillations was a 100-Watt compression driver typically used on emergency vehicles
(Southern Vehicle Products, D-60). The driver was mounted in the upper right-hand
corner of the cavity (x/Lx ≈ 0.9, y/Ly = 1, z/Lz ≈ 0.5), flush with the inner cavity wall and
facing downwards. The corner is the most efficient location for exciting a rectangular
cavity because it is always a pressure anti-node for any mode. A Kulite pressure
transducer (XCQ-062-15D) was mounted in the forward upper-left corner, as shown in
Fig. 4. The transducer signal was high-pass filtered at 500 Hz and low-pass filtered at 50
kHz. The Kulite measured the pressure fluctuations at the antinode, and provided a
reference signal for phase-locking the pressure-sensitive paint data to the resonant
oscillations.
The cavity was mounted with the x-dimension horizontal and the y-dimension
vertical, with the speaker on the upper surface as shown in Fig. 4. The back surface of
the cavity was a removable lid painted with polymer/ceramic PSP and bathophen
ruthenium luminophore. Pressure-sensitive paint measurements were made with a
Photometrics 14-bit CCD camera and an ISSI LM2 pulsed LED array (λ ≈ 470 nm) for
illumination. A 590-nm long-pass colored-glass filter was mounted on the camera to
separate the excitation light from the paint luminescence. A camera shutter speed of 185

148
ms was selected in order to acquire sufficient luminescence from the paint. Since the
acoustic pressure field is unsteady, phase-locking techniques were required to record
time-resolved pressure-sensitive paint data. The pulsing of the LED array was
synchronized with the pressure fluctuations measured by the Kulite pressure transducer
through the gating function on a triggered oscilloscope. A variable delay was added to
the oscilloscope’s TTL pulse with a Berkeley Nucleonics BNC-555 pulse/delay
generator. Phase-locked time histories were recorded by varying the delay throughout
the oscillation cycle. Thus, this system makes phase-averaged measurements of the
unsteady pressure field. The excitation pulse width was typically 1.0% of the oscillation
period, and each delay step was 8.3% of the period. Thus, there were 12 time steps
evenly spaced throughout the complete oscillation cycle.
Figure 8.5: Experimental setup for acoustic PSP measurements.

149
8.4 Data Reduction
Data reduction techniques were developed in order to successfully resolve acoustic-
level pressures. The fidelity of pressure-sensitive paint measurements is primarily
limited by shot noise in the CCD camera. Furthermore, the temperature sensitivity of
PSP is a source of significant bias errors in most paint measurements. These two factors
combined account for most of the errors in paint measurements.134 Another potential
source of error in pressure-sensitive paint measurements is any misalignment of the test
object between the reference and test condition images. Particularly when low-level
pressures are being measured, image misalignment errors can be substantial. These
sources of error were reduced through use of the data acquisition and reduction
techniques discussed as follows.
8.4.1 Shot Noise
Random errors in the paint’s intensity signal are primarily attributable to shot noise in
the CCD sensor. Shot noise is related to the electrical noise generated when the sensor
converts the photons to an electrical signal, and in the digitization of that signal. Since
shot noise is a random error, it may be reduced through averaging.135 The error decreases
with the square root of the number of samples acquired. Image averaging is a
straightforward technique for reducing shot noise, but offers diminishing returns as the
number of samples increases. In the current tests, 100 images were averaged to compile
a wind-on image. The reference image was also an average of 100 images. Thus, the
random shot noise for both the wind-on and reference images was reduced by an order of
magnitude by averaging.
8.4.2 Temperature Effects
In aerodynamic testing in wind tunnels, temperature variations can be a significant
source of error for pressure-sensitive paint measurements. If there is an unknown
temperature change between the reference and test condition images, the temperature
effect will produce a bias of unknown magnitude in the pressure data. Researchers have
compensated for the temperature effect by using a temperature-sensitive paint to correct

150
the luminescent data.136 An alternative technique is to use a bi-luminophore paint, which
allows acquisition of the pressure and temperature data simultaneously without having to
repaint the model.137,138
The maximum temperature fluctuation induced by sound pressure fluctuation is given
by129
00
1 PT TP
γγ
′−′ = . 8.8
Thus, for a ±500-Pa pressure fluctuation at atmospheric pressure (101.3 kPa) and
temperature (298 K), the maximum temperature fluctuation will be ±0.42 K. The
temperature sensitivity of polymer/ceramic pressure-sensitive paint is given as 1.24%
change in intensity per degree Kelvin.41 Despite these factors, temperature-induced
errors are negligible in the current set of experiments. The painted acrylic surface has a
fairly large heat capacity, making the temperature oscillations in the paint layer several
orders of magnitude less than the maximum fluctuation in the test gas. McGraw et al.120
made a similar argument for their paint tests, and showed experimentally that temperature
gradients induced by high-amplitude acoustic fields could be safely neglected.
Furthermore, Sakaue121 showed a temperature gradient of less than 0.01 K across the
entire painted surface of the cavity, even when driving at high sound pressure levels (172
dB). This represents an error in sound pressure of about 7 Pa. Thus, temperature
gradients and fluctuations are considered negligible, and explicit temperature-correction
schemes are unnecessary for the subject work.
8.4.3 Image Misalignment
Any slight displacement of the cavity between the speaker-on and reference images
can cause substantial errors, particularly if there are significant spatial inhomogenaities in
the paint layer. Image registration techniques are one attempt at mitigating this issue.139
A more effective and straightforward correction, however, is to limit or eliminate the
model motion. In these tests, the cavity was securely fixed to the table with rubber
mounts and clamps. The rubber provided a certain amount of damping and traction to
prevent motion of the box induced by speaker vibrations. Furthermore, it was important
151
to minimize the vibrations in the lab. Data quality was significantly enhanced when
images were acquired in a quiet, vibration-free environment.
8.4.4 Data Reduction Procedure
A total of 200 images were acquired for each phase-locked position within the
oscillation cycle. The images were acquired in 20 sets of 10 images, each set consisting
of 5 speaker-on and 5 speaker-off conditions. Each image was normalized by the average
intensity value of the painted surface. The 100 speaker-on images were averaged
together, as were the 100 speaker-off images. An intensity ratio was calculated by
dividing the speaker-off averaged image by the speaker-on averaged image. This scheme
was repeated for all 12 phase delays to compile a time history throughout the oscillation
cycle. The intensity images were then converted to pressure through an in situ calibration
from the Kulite pressure transducer. The pressure data was then spatially filtered with a
two-dimensional low-pass spatial filter with a frequency cutoff of 3 wavelengths per
dimension. This filter is useful in this application because sinusoidal fluctuations are
anticipated in the resonance cavity, and any higher spatial frequencies will be due only to
non-linear effects and should not exceed the third harmonic. After spatial filtering, a
temporal low-pass filter was applied to the pressure time-history at each pixel location.
The filter was a 3rd order Chebyshev-II filter with the stop-band 20-dB down and a cutoff
frequency of 5 kHz.
8.5 Results
The (1,1,0) mode within the cavity was excited by a corner-mounted loudspeaker and
the paint response was recorded. The pressure-sensitive paint results are then compared
with linear acoustic theory as well as measured data from a conventional piezoresistive
pressure transducer.
8.5.1 Linear Modal Theory
Despite the fact that the acoustic pressures in the resonance cavity are so high that
nonlinear effects are anticipated, linear modal theory can serve as a useful comparison to

152
the experimental data. The following development of the modal theory is after the
derivation of Pierce.129 Linear modal theory for an enclosed cavity assumes that the
walls are rigid, with infinite impedance (perfect reflectivity). The pressure time-history
within the resonance cavity may be expressed as
( ) ( ) ( ), , i n tp t n e ω−=x xΨ 8.9
where ( )nω is the oscillation frequency and ( ), nxΨ is an eigenfunction that satisfies
the Helmholtz equation
( ) ( )2 2 , 0k n n⎡ ⎤+ =⎣ ⎦ x∇ Ψ 8.10
within the volume of the cavity. The boundary condition
( ) out, 0n • =n∇Ψ x 8.11
is satisfied at the walls of the resonance cavity. The dimensions of the box on each
coordinate axis are given by Lx, Ly, and Lz. Thus, the spatial variation of pressure is given
by the eigenvalue problem, with the eigenvalues given by
( ) ( )2 2 2k n n cω= 8.12
where c RTγ= is the speed of sound. A solution for the Helmholtz equation may be
found by breaking the eigenfunction up by separation of variables:
( ) ( ) ( ) ( ), t X x Y y Z z=xΨ 8.13
When equation 8.13 is inserted into the Helmholtz equation we obtain
( ) ( ) ( ) 2 0
X x Y y Z zk
X Y Z′′ ′′ ′′
+ + + = 8.14
which may be broken up into three ordinary differential equations
( ) ( )( ) ( )( ) ( )
2
2
2
0
0
0
x
y
z
X x k X x
Y y k Y y
Z z k Z z
′′ + =
′′ + =
′′ + =
8.15
with the three separation constants kx, ky, and kz being related to the eigenvalues by
2 2 2 2x y zk k k k= + + 8.16

153
The boundary condition at 0x = dictates that the solution for equation 8.15a be of the
form cos xk x . The second boundary condition at xx L= requires that sin 0x xk L = ,
which gives x x xk n Lπ= . Therefore, the solution of the x-component differential
equation (8.15a) is given by
( ) ( )cos x xX x A n x Lπ= 8.17
where A is an arbitrary constant. The solutions to the y- and z-component differential
equations follow the same reasoning. Thus, a solution for the eigenfunction is
( ), , , cos cos cosyx zx y z
x y z
n yn x n zn n n A
L L Lππ π⎛ ⎞⎛ ⎞ ⎛ ⎞
= ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎝ ⎠xΨ 8.18
The corresponding eigenvalues for this eigenfunction are
( )22 2
2 2, , yx zx y z
x y z
nn nk n n n
L L Lπ
⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞⎢ ⎥= + +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦ 8.19
Thus, the complete pressure-time history inside the resonance cavity is given by
( ) ( ), , , cos cos cosy i n tx z
x y z
n yn x n zp x y z t A e
L L Lωππ π −⎛ ⎞⎛ ⎞ ⎛ ⎞
= ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎝ ⎠ 8.20
with the frequency being specified by the speed of sound, the box dimensions, and the
mode numbers nx, ny, and nz as
( )22 2
yx z
x y z
nn nn c
L L Lω π
⎛ ⎞⎛ ⎞ ⎛ ⎞= + +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎝ ⎠
8.21
The dimensions of the subject cavity were Lx = 0.216 m, Ly = 0.169 m, and
Lz = 0.102 m and the experiments were performed at room temperature (24.1°C). With
these parameters, Eq. 8.21 indicates that the resonant frequency should be 1298 Hz for
the (1,1,0) mode. Equation 8.20 yields the pressure distribution inside the cavity volume.
The calculated surface-pressure field on the cavity wall is shown in Figure 8.6, with the
amplitude scaled to match the experimental data. The nodal lines in the pressure field are
along the central axes of the x- and y- coordinates (x is horizontal and y is vertical in the
figure).

154
(a)
(b)
Figure 8.6: Analytical solution for the (1,1,0) mode shape in a rectangular cavity, ω = 1298 Hz. Pressure is expressed in (a) Pascals and (b) pressure ratio.

155
8.5.2 Pressure-Sensitive Paint Results
The frequency of the driving signal was adjusted such that a maximum pressure
amplitude was obtained near the resonant frequency for the (1,1,0) mode. The tuned
driving frequency was 1286 Hz, which is within 1% of the predicted resonance
frequency. Figure 8.7 shows pressure-sensitive paint data for the (1,1,0) mode shape at
an SPL of 145.4 dB. This pressure map represents one phase-averaged point within the
oscillation period, at the condition when the anti-node pressure is nearly maximum. The
pressure distribution compares favorably with the general distribution from linear theory
shown in Figure 8.6. There are some minor differences between the paint data and the
theoretical solution: the nodal lines are slightly curved, and the pressure in the center of
the resonance cavity is slightly lower than ambient pressure. Furthermore, the maximum
amplitudes in the left corners are slightly greater than the pressure amplitudes in the right
corners. These differences may be attributed to nonlinear effects at the high sound
pressure levels of these tests (145.4 dB).
Figure 8.8 and Figure 8.9 show the spatial pressure distribution at all twelve time
steps, with each step separated by 30° phase within the oscillation cycle. Figure 8.8 (a)
and Figure 8.9 (a) show the antinode pressures at their maxima and minima. Figure 8.8
(d) and Figure 8.9 (d), however, show a nearly uniform pressure across the cavity, as
expected. The uniform pressure distribution at these time steps confirms the isothermal
assumption.
One sample time-history from the paint data at a single point is shown in Figure 8.10.
The signal from the Kulite pressure transducer is compared with the analytical solution
and the pressure-sensitive paint data points. The paint data results from averaging the
signal in a 10-pixel square window in the bottom, left corner of the cavity (x/Lx ≈ 0,
y/Ly ≈ 0). The error bars on the PSP data are estimated from the standard deviation of
the 100-sample average, yielding a mean error of ± 12.5 Pa. The paint data is in good
agreement with both the Kulite data and the analytical solution. The pressure time-
history within the cavity is slightly nonlinear, as evidenced by the slight differences
between the Kulite transducer measurement and the linear theory. These slight

156
nonlinearities are to be expected at the moderately high pressure levels at which the
cavity was driven.
(a)
(b)
Figure 8.7: Pressure-sensitive paint data for the (1,1,0) mode shape at 145.4 dB and ω = 1286 Hz. Pressure is expressed in (a) Pascals and (b) pressure ratio.

157
(a) 0°
(b) 30°
(c) 60°
(d) 90°
(e) 120°
(f) 150°
Figure 8.8: Time-sequence of PSP data for the (1,1,0) mode shape in phase steps of 30° (64.8 μs) from (a) 0° to (f) 150°.

158
(a) 180°
(b) 210°
(c) 240°
(d) 270°
(e) 300°
(f) 330°
Figure 8.9: A continuation of the time-sequence of PSP data for the (1,1,0) mode shape in phase steps of 30° (64.8 μs) from (a) 180° to (f) 330°.

159
Figure 8.10: Pressure time-history comparison between pressure-sensitive paint, Kulite pressure transducer measurements, and linear theory.
A cross-section of the paint data along the left vertical edge (x/Lx = 0) of the cavity is
shown in Figure 8.11. Each curve represents a separate time step, spaced equally
throughout the period of 777 μs. The node is clearly visible at the midpoint of the wall
(y/Ly = 0.5), where the pressure fluctuations are nearly zero. There is some distortion
visible in the spatial waveform, but the data largely resembles the linear numerical results
of Vanhille and Campos-Pozuelo.132 A pressure plot of the phase-averaged RMS
pressure fluctuations is shown in Figure 8.12. This plot also indicates the node locations
across the end wall of the resonance cavity, taking into account the entire cycle of the
pressure fluctuation. This plot is a concise representation of the large volume of data
generated by the pressure-sensitive paint measurements.

160
Figure 8.11: Vertical cross-section of the pressure-sensitive paint data at x/Lx = 0 at twelve time steps equally spaced throughout the period.
Figure 8.12: RMS pressure data (Pa) as measured by PSP for the (1,1,0) mode shape.
161
8.5.3 Discussion
The level of the pressure amplitudes measured in these experiments is on the order of
500 Pa. It is estimated that this pressure-sensitive paint system and data reduction
methodology are capable of reliably resolving pressure amplitudes as low as 50 Pa (125
dB). This SPL is about 4.6 dB higher than the theoretical minimum detectable level
presented in Table 8.1 for a 14-bit camera with the polymer/ceramic paint. A unique
characteristic of porous paint formulations can be employed to improve the pressure
sensitivity. Figure 8.4 shows that the slope of the calibration curve near vacuum
conditions is approximately 3.7 times higher than the slope at atmospheric conditions. If
the mean pressure can be reduced, then the higher sensitivity of the paint formulation at
these pressures can be advantageously exploited. A second alternative is to alter the test
gas within the resonance cavity. If an inert gas such as nitrogen or argon at atmospheric
pressure is injected with trace amounts of oxygen, then the resulting gas mixture
approximates air at low mean pressures as sensed by the paint.
One significant advantage of the current test is that the pressure field is repeatable.
This allows for phase-averaging techniques to be employed. If a transient pressure field
must be measured, then other techniques and instrumentation can be utilized. A high-
speed CCD camera may be used, although the lower signal-to-noise ratio of these
cameras will establish a higher minimum-detectable-level. Alternatively, a point
measurement could be acquired with a laser-scanning system for illumination and a
photomultiplier tube for detection. This type of system offers much higher light
intensity, which improves the signal-to-noise ratio for real-time measurements.
A hallmark of the polymer/ceramic paint utilized in these tests is that it is a very
bright paint formulation. The titanium dioxide particles present in the paint not only
enhance the response time, but also serve as reflective particles that make the paint much
brighter than most other formulations. This allows for a very short shutter exposure time
(185 ms), which decreases thermal noise in the image. The total amount of light
integrated by the camera was 185 ms: 100 images were acquired at 185-ms each, but the
excitation light was pulsed such that the paint was illuminated for 1% of the exposure
time. This contrasts with the 4-seconds of light required for Brown’s tests of a NACA

162
0012 airfoil in a low-speed wind tunnel.135 He found that RMS error was adequately
reduced by averaging 8 wind-on images, with a 500 ms exposure for each image. The
total pressure gradient over the airfoil surface was about 4 kPa. The significant limiting
error source in his tests was a temperature change as the wind tunnel cooled down after
the run. In the current acoustic PSP tests, which are not hindered by temperature
problems, the resolved pressure is on the order of 1 kPa and the total integrated light is
185 ms.
The power of the image averaging methodology is shown by comparing Figure 8.13
with Figure 8.14. The first figure is an intensity ratio with no image averaging applied –
it is the ratio of a single speaker-off image to a single speaker-on image. Figure 8.14
represents a ratio of the 100-average speaker-off image to the 100-average speaker-on
image. The same intensity scale has been applied to both figures. Notice that the un-
averaged image has absolutely no useful data. The 100-image averaged data, however,
shows the general expected pressure field of the (1,1,0) mode shape. The unfiltered data
in Figure 8.14 compares favorably with the analytical solution shown in Figure 8.6.
Figure 8.13: Acoustic box image; no image averaging or spatial filtering.

163
Figure 8.14: Average of 100 speaker-on images divided by average of 100 speaker-off images, no filtering.
The two different spatial filtering techniques are compared in Figure 8.15 and Figure
8.7. The PSP data shown in Figure 8.15 is filtered with the 3-pixel radius moving
window. This filtering technique significantly reduces the spatial noise present in Figure
8.14. Even with the spatial averaging, there is still a substantial amount of noise. This is
typical of low-level pressure measurements, since the magnitude of the pressure
fluctuations is so small and the signal-to-noise ratio is low. When filtered with the 2D
FIR spatial filter, the pressure field improves significantly, as shown in Figure 8.7.
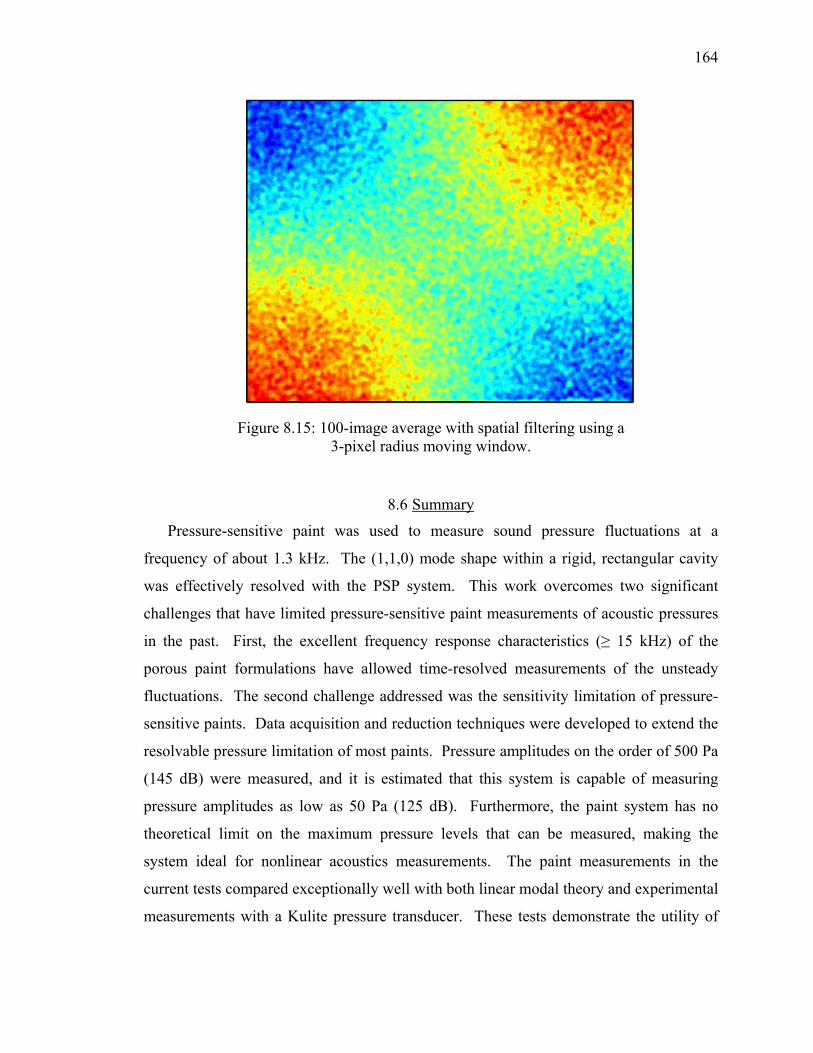
164
Figure 8.15: 100-image average with spatial filtering using a 3-pixel radius moving window.
8.6 Summary
Pressure-sensitive paint was used to measure sound pressure fluctuations at a
frequency of about 1.3 kHz. The (1,1,0) mode shape within a rigid, rectangular cavity
was effectively resolved with the PSP system. This work overcomes two significant
challenges that have limited pressure-sensitive paint measurements of acoustic pressures
in the past. First, the excellent frequency response characteristics (≥ 15 kHz) of the
porous paint formulations have allowed time-resolved measurements of the unsteady
fluctuations. The second challenge addressed was the sensitivity limitation of pressure-
sensitive paints. Data acquisition and reduction techniques were developed to extend the
resolvable pressure limitation of most paints. Pressure amplitudes on the order of 500 Pa
(145 dB) were measured, and it is estimated that this system is capable of measuring
pressure amplitudes as low as 50 Pa (125 dB). Furthermore, the paint system has no
theoretical limit on the maximum pressure levels that can be measured, making the
system ideal for nonlinear acoustics measurements. The paint measurements in the
current tests compared exceptionally well with both linear modal theory and experimental
measurements with a Kulite pressure transducer. These tests demonstrate the utility of

165
pressure-sensitive paint for making acoustics measurements. The pressure-sensitive paint
data provides a complete time-history of the pressure at over 137,000 pixel locations
across the 365-cm2 area of the cavity. As such, the paint system is a distributed array of
nano-scale optical microphones. The pressure-sensitive paint system described in this
work may be applied to tests where high spatial resolution is required, such as nonlinear
acoustics, ultrasonic measurements, and acoustics in MEMS devices.

166
CHAPTER 9: CHARACTERIZATION OF THE HARTMANN OSCILLATOR
The Hartmann tube is a device that generates high-intensity sound through the
oscillation of a shock wave. Shock oscillations are created by the flow of an
underexpanded jet interacting with a resonance cavity. Recent interest in the Hartmann
tube has focused on using the high-intensity sound for flow-control applications. In this
work, pressure-sensitive paint (PSP) was used to characterize the unsteady flowfield of
the Hartmann tube. PSP effectively resolved the shock oscillations at 12 kHz.
Furthermore, PSP was used to measure propagating acoustic waves emanating from the
Hartmann tube. This work provides new insight into the relationship between the
unsteady fluid dynamics and acoustics of the Hartmann tube – including the nature of the
shock oscillations, unsteady flow interaction with the resonance cavity, and directionality
of the radiated sound.
9.1 Introduction
The Hartmann tube is a device that generates large-amplitude sound waves through
the oscillation of a shock wave. Julius Hartmann discovered this phenomenon as he
moved a pitot probe throughout an underexpanded jet, and first reported his results in
1919.140 Hartmann observed that the pressure measured by the pitot probe fluctuated
cyclically at certain locations in the jet of air, which he referred to as “intervals of
instability”. Hartmann’s later experiments with schlieren imaging141-147 revealed that the
sound generation is due to oscillation of the shock wave. The operating principle of the
Hartmann tube is depicted in Figure 9.1, with flow coming from a jet nozzle on the left
and flowing into a typical resonance cavity on the right. The oscillation cycle is
characterized by two primary phases indicated in the diagram, (a) filling of the resonance
cavity, and (b) discharge of flow from the cavity. When the exhausting flow from the

167
cavity meets the oncoming flow from the jet, the two jets disperse radially, as shown in
Figure 9.1(b). The motion of the external shock wave is driven by the periodic nature of
the flow entering and exiting the resonance cavity. The shock position and range of
motion are dependent upon the axial location of the resonance cavity with respect to the
shock-cell structure of the impinging jet, shown for a typical underexpanded jet in Figure
9.2. According to Powell and Smith,148 the maximum range of shock motion is limited to
within one cell of the shock structure. Thus, both the frequency and amplitude of the
shock oscillations are dependent upon the location of the resonance cavity along the axis
of the underexpanded jet. In addition, Thompson has shown that the oscillation
frequency depends on wave propagation within the resonance cavity.149 Thus, the length
of the resonance cavity also has an influence on the oscillation frequency. Finally, the
diameter of the resonance cavity has been shown to have an influence on the intensity of
the radiated sound from the Hartmann tube. Brun and Boucher found that a resonance
cavity diameter from 1.33 to 2.5 times the nozzle diameter produced the highest intensity
sound.150 This is due to the characteristic broadening of an underexpanded jet, and the
need to accommodate the maximum width of the jet within the resonance cavity, without
frictional losses associated with the cavity walls. These three factors – length, depth, and
location of the resonance cavity – can be tailored to maximize the power output and tune
the frequency of the Hartmann tube to arbitrary values over a wide range.
(a)
(b)
Figure 9.1: Conceptual drawing showing the operating mechanism of the Hartmann tube (a) Filling of resonance cavity and (b) cavity discharge (after Brocher et al.151).

168
Figure 9.2: Schlieren image of underexpanded open jet, showing the shock-cell structure.
Several researchers have made modifications to improve the performance of
Hartmann’s original design. Savory experimented with various pads and rings
surrounding the jet to enhance the acoustic power output.152 He also suggested the use of
a stem along the axis of the jet to stabilize the flow. This modification, which Hartmann
and Trudsø also implemented,153 allowed the tube to oscillate even when the jet was
operating in the high-subsonic region. Brun and Boucher,150 and Kurkin154 implemented
a horn-shaped cavity around the Hartmann tube to amplify and direct the propagating
acoustic waves. The size and shape of these cavities were tailored such that acoustic
waves were reflected in phase with the generating waves to amplify the power output. As
such, the horn shapes are wavelength-dependent and must be tailored for one specific
operating frequency of the Hartmann tube. Sprenger,155 Brocher and Aridssone,156 and
Kawahashi et al.,157 introduced a variation on the Hartmann tube by creating stepped or
conical shaped resonance cavities. The change in area inside the resonance cavity serves
to strengthen the propagating shock wave within the cavity. The main intent of changing
the cavity area in these investigations was to increase the heating characteristics of the
tube so that it could be used as an igniter.
Despite being an invention from the early 20th century, the Hartmann tube is
experiencing a resurgent interest in development for flow control applications. The high-
amplitude acoustic fluctuations generated by the Hartmann tube and the high-bandwidth
tunable frequency characteristics have made the Hartmann tube an ideal candidate for an
effective flow control device. Both Raman et al.4 and Kastner and Samimy5,158 have

169
developed the Hartmann tube for flow control applications. Their work has involved
making variable-frequency actuators, characterizing the frequency response and acoustic
output of these devices, and modifying the geometry to improve sound intensity. In
particular, researchers have seen a directivity pattern of the flow field4 that can be
exploited for flow control applications. Some computational work has been done to
explore the fluid mechanics of the directivity pattern.4 There is a need for experimental
data to validate the computational work and provide further insight into the Hartmann
tube flow field.
There is a significant volume of literature regarding the theoretical151,159-161 and
experimental characterization of the Hartmann tube flow field. These measurements,
however, have been limited to qualitative schlieren imaging, or point-wise pressure
measurements. A quantitative and full-field measurement technique is needed to
characterize the flow field to provide information for design of Hartmann tubes as flow
control devices. Porous pressure-sensitive paint, recently developed for unsteady global
pressure measurements, is an ideal tool for characterizing the Hartmann tube flow.
The purposes of this work were three-fold. First, the dynamic response
characteristics of porous pressure-sensitive paint will be demonstrated. Porous paints are
known to have exceptionally fast response characteristics, and the Hartmann tube is a
good high-frequency flowfield to demonstrate the capabilities of porous PSP. Second,
the sensitivity of PSP will be extended such that large-amplitude, propagating acoustic
waves can be measured. Third, both PSP and schlieren imaging techniques will be used
to characterize the unsteady fluid dynamics and acoustics of the Hartmann tube. For flow
control applications, it is important to be able to tailor and direct the injected flow. The
impact of resonance cavity geometry on the fluid dynamics and radiated sound field will
be evaluated.
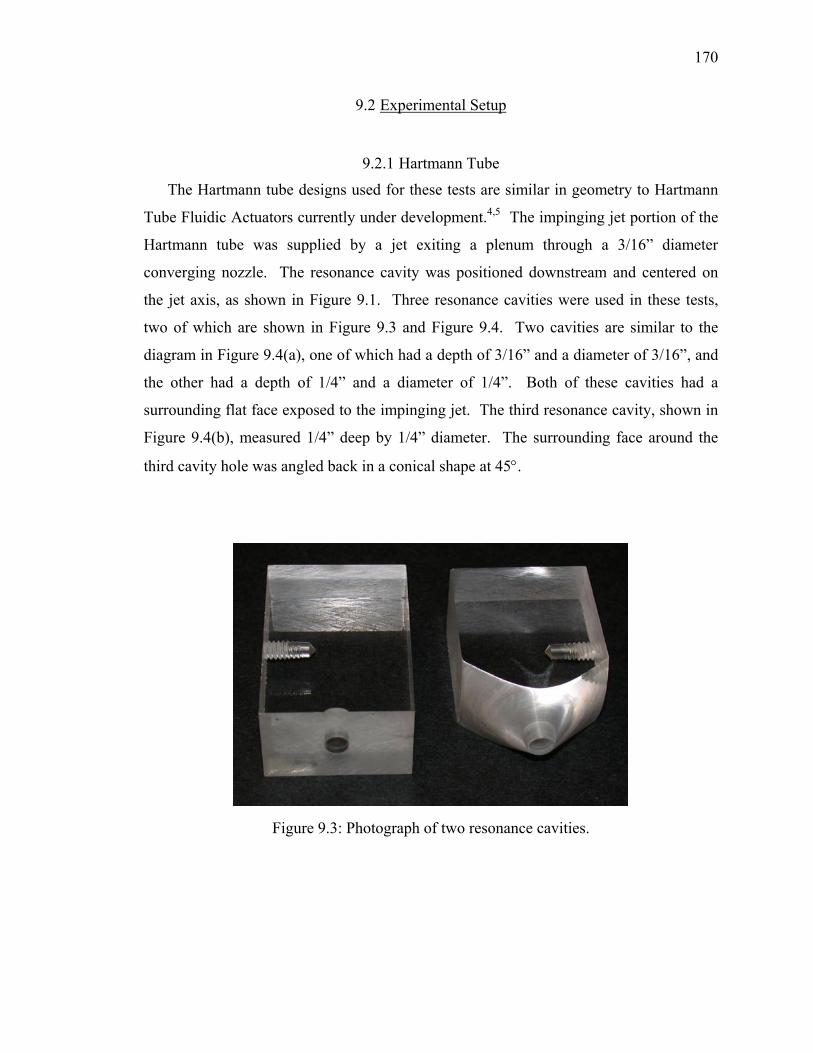
170
9.2 Experimental Setup
9.2.1 Hartmann Tube
The Hartmann tube designs used for these tests are similar in geometry to Hartmann
Tube Fluidic Actuators currently under development.4,5 The impinging jet portion of the
Hartmann tube was supplied by a jet exiting a plenum through a 3/16” diameter
converging nozzle. The resonance cavity was positioned downstream and centered on
the jet axis, as shown in Figure 9.1. Three resonance cavities were used in these tests,
two of which are shown in Figure 9.3 and Figure 9.4. Two cavities are similar to the
diagram in Figure 9.4(a), one of which had a depth of 3/16” and a diameter of 3/16”, and
the other had a depth of 1/4” and a diameter of 1/4”. Both of these cavities had a
surrounding flat face exposed to the impinging jet. The third resonance cavity, shown in
Figure 9.4(b), measured 1/4” deep by 1/4” diameter. The surrounding face around the
third cavity hole was angled back in a conical shape at 45°.
Figure 9.3: Photograph of two resonance cavities.

171
(a)
(b)
Figure 9.4: Geometries for the (a) flat face and (b) 45° angled face resonance cavities. All dimensions are in inches, and the cavity shapes are made from 1” thick acrylic.
9.2.2 Pressure-Sensitive Paint
The experimental setup of the Hartmann tube with PSP instrumentation is shown in
Figure 9.5. Polymer/ceramic was used as the porous binder for the PSP in these tests.
The paint binder was prepared in a manner similar to Scroggin’s procedure,54,55 and
Tris(Bathophenanthroline) Ruthenium Dichloride, (C24H16N2)3RuCl2 from GFS
Chemicals, served as the luminophore. The paint was applied to a 0.020” thick
aluminum sheet by air brush. For measurement of the Hartmann tube flow, the paint
sample was positioned on the edge of the jet, as shown in Figure 9.5. The paint sample
was originally positioned on the centerline of the jet; however the presence of the paint
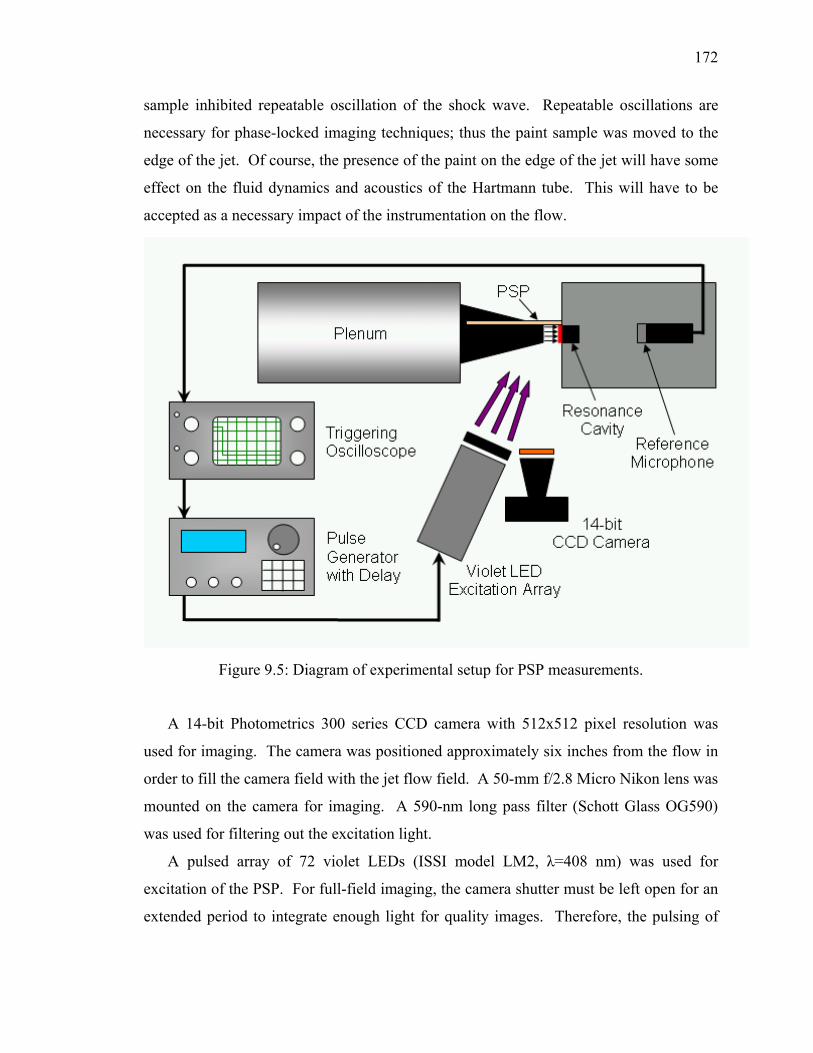
172
sample inhibited repeatable oscillation of the shock wave. Repeatable oscillations are
necessary for phase-locked imaging techniques; thus the paint sample was moved to the
edge of the jet. Of course, the presence of the paint on the edge of the jet will have some
effect on the fluid dynamics and acoustics of the Hartmann tube. This will have to be
accepted as a necessary impact of the instrumentation on the flow.
Figure 9.5: Diagram of experimental setup for PSP measurements.
A 14-bit Photometrics 300 series CCD camera with 512x512 pixel resolution was
used for imaging. The camera was positioned approximately six inches from the flow in
order to fill the camera field with the jet flow field. A 50-mm f/2.8 Micro Nikon lens was
mounted on the camera for imaging. A 590-nm long pass filter (Schott Glass OG590)
was used for filtering out the excitation light.
A pulsed array of 72 violet LEDs (ISSI model LM2, λ=408 nm) was used for
excitation of the PSP. For full-field imaging, the camera shutter must be left open for an
extended period to integrate enough light for quality images. Therefore, the pulsing of

173
the excitation light was phase-locked with the oscillation of the shock wave in order to
capture one point in the oscillation cycle. The strobe rate was synchronized with the
signal of a miniature electret microphone. The microphone signal was passed to an
oscilloscope with a gate function. The gate function produced a TTL pulse with a width
corresponding to the time the scope was triggered on. Thus, the oscilloscope was used to
generate a once-per-cycle TTL pulse. This TTL signal from the oscilloscope was sent to
the external trigger input of a pulse/delay generator (BNC 555-2). The pulse generator,
with variable pulse width and delay, directly strobed the LED array at any arbitrary
phase-locked point in the oscillation cycle. The pulse width of the excitation light was
set at 1 μs, which was less than 1.2% of the oscillation period. Images throughout the
oscillation period were acquired, with a delay of 4 μs between data points. The camera
exposure time for these experiments was on the order of 400 ms.
9.2.3 Schlieren Imaging
A schlieren imaging setup was used to visualize the flowfield of the Hartmann tube.
The experimental setup involved the use of a single-pass schlieren system. The
illumination source was a strobe light, a General Radio company model 1538-A
Strobotac. The flash rate of the strobe light was phase-locked to the Hartmann tube
oscillations in the same manner as used for PSP. A neutral density filter was placed in
front of the strobe light to control the light intensity passing through the flow and
reaching the camera. A 6-inch diameter front-surface concave mirror with a focal length
of 5 feet was used to pass the light through the flowfield. A knife-edge was placed at the
focal point of the mirror to improve the image contrast. The flowfield was then imaged
with a digital video camera.
9.3 PSP Data Reduction
Initially, a dark image was subtracted from all of the data images to remove the dark
current on the CCD and any effects of stray light. The wind-off reference image was
subsequently divided by the particular wind-on image for each phase delay. The intensity
ratio was then converted to pressure through an a priori Stern-Volmer calibration, and in

174
some cases the calibration curve was shifted to match the indicated pressure in the data
set to a known value. Application of spatial filtering, using a 3 pixel by 3 pixel window
size, reduced the spatial noise in the data.
9.4 Results and Discussion
9.4.1 Flat-Face 3/16” Cavity
Initial tests were conducted with the 3/16” resonance cavity with flat face. It was
found that the smaller diameter resonance cavity (3/16”, equal to the jet nozzle diameter)
produced higher-frequency oscillations than the larger cavity (1/4”, 1.3 times the jet
nozzle diameter). The larger cavity, however, produced higher-intensity sound, agreeing
with the results of Brun and Boucher.150 Therefore, the 3/16” resonance cavity, which
produced oscillations at 12 kHz, was used to demonstrate the fast response characteristics
of porous PSP.
The results of the pressure-sensitive paint tests from the Hartmann tube with 3/16”
cavity are shown in Figure 9.6. The nozzle is shown in black on the left side of the
image, with the flow moving from left to right. The resonance cavity is shown in blue on
the right side of the image. The PSP data is shown in the gap between the nozzle and the
cavity. The series of eight images represent eight equally spaced time steps of 10 μs
within the oscillation period of the Hartmann tube. The nozzle pressure ratio (P0/Patm)
was 2.73, which generated flow oscillations at a frequency of 12.0 kHz.
The PSP clearly resolves the pressure field of the oscillating shock wave at each point
within the cycle. Notice the pressure wave near the wall around the resonance cavity.
This pressure wave also oscillates in phase with the shock oscillation, and appears to
interact with the adjacent wall. This fluid-structure interaction will be investigated
further with the 1/4” resonance cavities.

175
Figure 9.6: PSP image sequence depicting shock oscillation, with 10 μs time steps between each image.
psia

176
9.4.2 Flat-Face 1/4” Cavity
PSP and schlieren results from tests with the flat-faced cavity are shown in Figure 9.7
and Figure 9.8, respectively, with the jet flowing from left to right. The nozzle pressure
ratio was 2.47, producing an oscillation frequency of 9.1 kHz. Upon initial inspection, it
is clear that PSP resolves the position of the shock wave at various points in the cycle.
The series of six images in Figure 9.7 are equally spaced with 24 μs time steps, and
represent the entire oscillation period. Likewise, the images in Figure 9.8 are equally
spaced with 16 μs time steps, and also cover the entire period of cavity filling and
exhaust. Exhaust of flow from the resonance cavity is shown in Figure 9.7 (a) through
(c) and Figure 9.8 (a) through (d). Filling of the cavity is shown in Figure 9.7 (d) through
(f) and Figure 9.8 (e) through (h). Several key features of the flow may be noticed. First,
the beginning of the exhaust phase produces quite a sudden movement in shock location,
as seen in the difference between Figure 9.8 (a) and (b). This impulsive shock movement
initiates a strong outward-moving pressure pulse, as seen in the near-field images of
Figure 9.7 (b) through (d). Another interesting feature is that the exhausting flow from
the resonance cavity appears to have an effect on the pressure distribution around the
shock, even altering the shape of the shock itself. There is a certain backwards curvature
to the edges of the shock during the exhaust phase, as can be seen in Figure 9.7 (a). This
curvature is most likely due to the radial interaction of the escaping flow with the
oncoming jet. Furthermore, the interaction of the exhausting flow from the cavity with
the oncoming jet creates regions of high vorticity. In particular, a region of high vorticity
may be seen in the upper portion of Figure 9.8 (c). These vortical structures are then
convected radially away from the resonance cavity, as shown in Figure 9.8 (c) through
(h). These regions or vorticity are similar to the observations of Kastner and Samimy5
with their Hartmann Tube Fluidic Actuator. It should be noted that the propagation speed
of the pressure-pulse is much faster than the speed at which the vortical structures are
convected outward.

177
(a)
(b)
(c)
(d)
(e)
(f)
psia
Figure 9.7: PSP image sequence showing shock wave oscillation for the flat resonance cavity with 24 μs time steps.

178
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 9.8: Schlieren image sequence showing shock wave oscillation for the flat resonance cavity with 16 μs time steps.

179
Further results from the same flow conditions can be seen in the PSP images of
Figure 9.9 and the schlieren images of Figure 9.10. Both sets of images have equal time
delays of 16 μs. One significant feature shown in Figure 9.9 is the outward propagation
of the acoustic wave. The black arrows in each figure mark the approximate leading edge
of the propagating acoustic wave. The pressure fluctuation associated with this wave is
about 0.8 psi from peak-to-peak. This highlights the capability of porous PSP to make
acoustics measurements. The PSP data also indicates that the pressure wave is initiated
by the impulsive outward movement of the shock wave, which may be considered similar
to a vibrating piston. The fluid dynamics in the near-field of the shock oscillation may
also have an impact on the radiation pattern of the emitted sound waves. The schlieren
images of Figure 9.10 agree well with the PSP results, and with the historical results of
Hartmann and Trolle.142,145 Both image sequences begin at approximately the same
phase in the oscillation cycle, at the initiation of the acoustic pressure pulse. The
schlieren images also demonstrate how the acoustic wave rapidly propagates away to the
far-field, compared with the relatively slow convection of the vortical regions away from
the resonance cavity. Approximately three vortical regions, generated by three
successive cycles, can be seen moving up and down the front face of the resonance cavity
in Figure 9.10 (c).

180
(a) (b)
(c)
(d) (e)
(f)
psia
Figure 9.9: PSP image sequence showing acoustic wave propagation for the flat resonance cavity with 16 μs time steps.

181
(a) (b) (c)
(d) (e) (f)
Figure 9.10: Schlieren image sequence showing acoustic wave propagation for the flat resonance cavity with 16 μs time steps.

182
When the Hartmann tube was driven at 9.1 kHz, and phase-locked PSP images were
taken at 4-μs intervals, a total of approximately 28 images were compiled to represent the
entire oscillation cycle. These twenty-eight phase-averaged samples can be reconstructed
to generate an average time history at any point in the measurement area. A typical
pressure time-history of one point is shown in Figure 9.11. Note that the four waveforms
visible are simply a concatenation of the one phase-averaged time-history. This was done
for visualization purposes, and the exact repeatability is only due to the concatenation
process. Notice the steep, rapid rise and decay times of the pressure pulse. This data
sample represents a rich source of information – essentially, a phase-averaged time-
history is available at every spatial point in the image. If the entire 512x512 CCD image
plane is utilized, over 260,000 reconstructed time-histories are available. The volume of
this information is limited primarily by the spatial resolution of the imaging system. This
large volume of data can be reduced to a manageable level by determining the root-mean-
square (RMS) pressure fluctuations for each point in the image plane. Pressure-sensitive
paint inherently measures absolute pressures (rather than dynamic pressures normally
used for determining RMS pressures). Therefore, a mean value of pressure over the
entire time history for each point was subtracted from each location. Once the dynamic
pressure was determined, the RMS pressure fluctuations were calculated by
( ) ( )2
1
1, ,N
rms ii
P x y P x yN =
= ∑ , 9.1
where Pi(x,y) the pressure at a spatial location (x,y), i is the sample within the time
history, and N is the total number of samples in the time history. The RMS pressure
levels throughout the near-field of the flat-face resonance cavity are shown in Figure
9.12. The high pressure-fluctuation levels between the nozzle and resonance cavity are
due to the shock oscillations. Also significant is the circular region of higher RMS
pressures above the shock oscillation region. These pressure fluctuations are most likely
due to the vortical regions created by interaction of exhausting flow with the incoming
jet. From the RMS pressure values, the sound pressure level (SPL) at each point was
calculated by
( ) ( ){ }10, 20log ,rms refSPL x y P x y P= , 9.2

183
where Pref is a reference pressure of 20 μPa. Sound pressure levels throughout the
measurement region are shown in Figure 9.13. The logarithmic scale of SPL data
provides a more useful representation of the pressure fluctuation directivity, since the
fluctuations range over several orders of magnitude. Clearly visible in Figure 9.13 is the
directivity of the near-field flow back towards the jet nozzle. The pressure fluctuations
across the measurement region range from over 170 dB near the oscillating shock wave,
to about 155 dB in peripheral regions. The sound pressure level for the point indicated in
Figure 9.11 is 162 dB. These sound pressure levels are similar to the results obtained by
Raman, et al.4 Pressure fluctuations on this scale are quite suitable for flow control
applications.
Figure 9.11: Reconstructed time history from phase-averaged PSP data for the flat resonance cavity.
Measurement Location

184
Figure 9.12: RMS pressure levels (psi) in the near field of the shock oscillation for the flat resonance cavity.
Figure 9.13: Sound pressure levels (dB, ref. 20 μPa) for the flat resonance cavity.

185
9.4.3 Angled-Face 1/4” Cavity
In order to investigate the effect of the resonance cavity geometry on the near-field
fluid dynamics and far-field acoustics, a 45° angled cavity was made to compare with the
flat-faced cavity. The flow conditions for the angled cavity were tailored such that the
oscillation frequency was matched to that of the flat-faced cavity. Thus, the nozzle
pressure ratio was adjusted slightly to 2.66, producing an oscillation frequency of 9.1
kHz. The small change in pressure required to match the frequency may be due to the
manufacturing tolerances involved in making two resonance cavities of the same
dimensions. The oscillation frequency is quite sensitive to the cavity dimensions,
particularly the depth and distance from the nozzle. The PSP sample used with the
angled cavity is a different shape than the flat-faced cavity, but made from the same batch
of paint.
PSP and schlieren results showing the shock oscillation for the angled cavity are
represented in Figure 9.14 and Figure 9.15, respectively, with the jet flowing from left to
right. As in the flat cavity results, the cavity exhaust phase is shown in Figure 9.14 (a)
through (c) and Figure 9.15 (a) through (d). The cavity filling portion of the cycle is
shown in Figure 9.14 (d) through (f) and Figure 9.15 (e) through (h). As in the flat cavity
results, the shock position is resolved by PSP at various phase-averaged points within the
cycle. Similar regions of vorticity are also visible in the schlieren images of Figure 9.15.
Closer examination of these results, however, reveals key differences. In Figure 9.14 (a),
near the beginning of the exhaust phase, the behavior of the collision of the two jets may
be observed. (Recall the characteristic behavior of the colliding jets shown in Figure 9.1
and described by Brocher et al.151). At this point in the oscillation cycle, the main jet
from the nozzle appears to be deflected normal to the axis of the jet. The jet exhausting
from the cavity, however, appears to be inclined back towards the cavity. At later points
in the cycle (Figure 9.14 (c), for example), the exhausting jet also turns in a direction
normal to the jet axis. Then, again, as the exhaust phase nears completion, the flow
exiting the cavity is redirected back towards the angled cavity. Time-sequence
animations of the data reveal that the position of the exhausting jet is bi-stable, and the
movement between the two states is quite rapid. The results of this exhausting jet

186
oscillation can be seen in the bi-stable flow pattern moving away from the cavity in the
lower portion of Figure 9.15 (b) and (c). This behavior may be explained by reasoning
that the main jet overpowers the exhausting jet at the beginning and end of the exhaust
phase, causing the exhaust flow to be directed back and away from the cavity. During
certain periods within the oscillation cycle, the exhausting jet may actually be attached to
the cavity face. The phenomenon of wall-attachment, called the Coanda effect,34,35 is the
tendency of a free jet to be drawn towards an adjacent wall. If this is the case, then wall
attachment may be capitalized upon to direct flow from the resonance cavity in a
particular direction. It is clear from this data that the geometry of the angled cavity has a
significant impact on the near-field fluid dynamics, when compared to the flow around
the flat-faced cavity.
Measurements of the propagating acoustic waves are shown in Figure 9.16 and Figure
9.17 for PSP and schlieren imaging, respectively. Arrows on the PSP images indicate the
approximate edge of the acoustic wave front. The initiation of the acoustic wave is not
clearly visible in the PSP results, because the near-field fluid dynamics dominates the
pressure field. As the acoustic wave moves out into the far field, however, it is clearly
discernable. The magnitude of the acoustic wave tends to be higher on the nozzle side,
compared to the resonance cavity side. The schlieren images in Figure 9.17 also clearly
show the propagating acoustic wave. Another interesting feature, shown in Figure 9.17
(e) and (f), is the presence of a weaker secondary wave propagating behind the initial
wave front. It is not known whether this wave is a reflection, or if it is generated by the
fluid dynamics of the Hartmann tube.

187
(a)
(b)
(c)
(d)
(e)
(f)
psia
Figure 9.14: PSP image sequence showing shock wave oscillation for the angled resonance cavity with 20 μs time steps.

188
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 9.15: Schlieren image sequence showing shock wave oscillation for the angled resonance cavity with 16 μs time steps.

189
(a) (b) (c)
(d) (e) (f)
psia
Figure 9.16: PSP image sequence showing acoustic wave propagation for the angled resonance cavity with 12 μs time steps.

190
(a)
(b)
(c)
(d)
(e)
(f)
Figure 9.17: Schlieren image sequence showing acoustic wave propagation for the angled resonance cavity with 16 μs time steps.

191
Root-mean-square pressure values were calculated from Eq. 9.1, and are shown in
Figure 9.18. The RMS pressures clearly indicate the region of shock oscillation, as well
as the directions of the deflected jet and exhausting flow. It is interesting to note that the
bi-stable characteristics of the exhausting jet are shown by the two-lobed directional
pattern of the flow. Sound pressure levels, as calculated by Eq. 9.2, are shown in Figure
9.19. Despite the presence of noise in this data set, there are several interesting features
that may be observed. The direction of the fluid dynamic near-field is clearly inclined
back towards the resonance cavity. This is in agreement with the bi-stable directional
tendency of the exhaust flow. The acoustic directionality in the far field, however, is
stronger on the nozzle side. This indicates that the geometry and near-field fluid
dynamics influence the propagation characteristics of acoustic waves in the far field.
Thus, the propagating acoustic waves have directivity in a different direction than the
near-field fluid dynamics. This behavior is important to consider when designing a
Hartmann tube for flow control purposes.
Figure 9.18: RMS pressure values (psi) in the near field of the shock oscillation for the angled resonance cavity.

192
Figure 9.19: Sound-pressure levels (dB, ref. 20 μPa) for the angled resonance cavity.
9.5 Summary
This work has demonstrated the utility of pressure-sensitive paint for resolving the
pressure field of the Hartmann tube. PSP was able to measure the location and strength
of a shock wave oscillating at a rate of 12 kHz, as well as the propagating acoustic waves
emanating from the Hartmann tube. The global pressure data obtained with PSP has
provided unique insight into the fluid dynamics and acoustics of the Hartmann tube. It
has been found that the exterior shape of the resonance cavity has a significant impact on
the directivity of the propagating acoustic waves, as well as on the near-field fluid
dynamics. It has been shown that the propagation characteristics of the acoustic wave are
different than the near-field fluid dynamics. In flow control applications, either the
acoustics or the fluid-dynamics may be employed for control authority, and care should
be taken to differentiate between the two phenomena.

193
CHAPTER 10: CONCLUSIONS AND RECOMMENDATIONS
10.1 Conclusions
The work has presented two key accomplishments: the study and design of fluidic
oscillators for flow control applications, and the development and application of porous
pressure-sensitive paint for unsteady flowfields. Development work on the fluidic
oscillator began with an investigation of the internal fluid dynamics of the feedback-free
class of oscillators. This study demonstrated that two jets within a mixing chamber
collide to form an oscillating shear layer driven by pairs of counter-rotating vortices.
This oscillatory vortical growth drives the external oscillations of the fluidic device. It
was shown that the fluidic oscillator can operate over a wide range of unequal flow rates
through the internal nozzles. Flow visualization studies at low flow rates revealed a
complex, woven structure of bifurcating jets that rotates in an ensemble motion.
Frequency studies revealed a peculiar mode-hopping behavior at these low flow rates,
where the operating frequency would make a series of jumps. The cause of this mode
hopping is not yet fully understood, but three-dimensional effects are an important factor.
The observed mode-hopping phenomenon is sensitive to the scale of the device, aspect
ratio, inlet geometry, and gas species. Scaling studies revealed that the oscillation rate
could be varied over a wide range of over two orders of magnitude by properly scaling
the device. These studies also determined that the contour of the inlet geometry is critical
for proper operation of the oscillator.
Beyond the basic studies of the oscillator’s fluid dynamics, the devices were
developed for practical flow control applications. A micro-scale version with a jet exit of
350 μm was characterized with PSP measurements and frequency surveys. This micro
fluidic oscillator possessed two different operating regimes that exhibited different

194
external flowfield characteristics. Internal jet transition from laminar to turbulent flow is
the likely mechanism for this observed change. Furthermore, the micro device issued a
very high frequency jet (> 20 kHz) at very low flow rates (~ 1 L/min).
In subsequent work, a miniature fluidic oscillator with a 3 kHz oscillation rate was
coupled with a low-frequency (200 Hz) solenoid valve to create dual-frequency injection.
This new actuator concept can simultaneously provide high-frequency content for mixing
enhancement, and powerful low-frequency content for forcing at the characteristic
frequency of a flowfield. The dual-frequency oscillator can be modulated across a wide
range of supply pressures, carrier frequencies, and duty cycles. In general, the low-
frequency carrier signal could be modified independently of the high-frequency
component of the flowfield.
A second novel actuator concept was developed to address the coupling of frequency
to flow rate in traditional fluidic oscillators. A hybrid oscillator was developed, where
the jet flow was modulated by a piezoelectric bender. This new oscillator successfully
decouples the oscillation frequency from the supply pressure, thereby enhancing the
utility of this device as a closed-loop flow control actuator. The piezo bender serves as a
destabilizing device, causing a wall-attached jet to separate and switch to an opposing
wall in a cyclical fashion. Current design iterations of the piezo-fluidic oscillator have
continuous frequency coverage up to 250 Hz, and discontinuous coverage to over 1.2
kHz. Furthermore, a sonic jet can be modulated by the piezo-fluidic device at low
frequencies at a modulation index of nearly 100%.
Miniature fluidic oscillators of the type investigated in the first few chapters were
applied to a practical flow control application. The oscillators were used to suppress
cavity resonance tones induced by jet-cavity interaction in transonic flow. Blowing from
the fluidic oscillator successfully suppressed the cavity tone by 17.0 dB, while steady
blowing at the same mass flow rate suppressed the tone by only 1.6 dB.
The work in the second part of this dissertation focused on the continued
development of pressure-sensitive paint. This work was an essential prerequisite for the
fluid-dynamic studies of the fluidic oscillator, since the PSP was used extensively as a
diagnostic tool. This work focused on understanding the frequency response limits of

195
various paint formulations. It also provides demonstrations of the paint applied to
unsteady flowfields with high frequency content.
A model was developed for the quenching kinetics of pressure-sensitive paint, and the
full implications on the unsteady response were presented. Two fast-responding paint
formulations – Polymer/ceramic and Fast FIB – were evaluated experimentally and
compared to the model predictions. Both the model and experiments demonstrated that a
pressure-sensitive paint layer responds faster to a decrease in pressure than an increase of
the same magnitude. The model shows excellent agreement with experimental results
obtained with a fluidic oscillator. Ultimately, it was found that these nonlinear effects
only become significant when the characteristic time scale of the flowfield is faster than
the response time of the paint. The polymer/ceramic PSP exhibited no roll-off in
frequency response at 1.59 kHz, indicating that the time constant is less than 630 μs.
Experimental results from Fast FIB, on the other hand, indicated a time constant of
approximately 1.6 ms.
The excellent response characteristics of the polymer/ceramic PSP were highlighted
by the demonstration of the paint for various applications. Polymer/ceramic PSP
resolved the (1,1,0) acoustic mode shape in a rectangular resonance cavity driven by a
speaker at 145 dB. Data acquisition and reduction techniques were developed to enable
measurement of the low-level unsteady pressures. The pressure-sensitive paint results
compared favorably to the analytical solution for the same geometry. A theoretical
minimum-detectable level was also established for the paint system, and a practical
minimum-detectable level was estimated to be 125 dB.
The polymer/ceramic formulation also recorded the 12-kHz oscillating shock wave
generated by a Hartmann oscillator, as well as the propagating acoustic waves. The
Hartmann tube application demonstrated the usefulness of PSP for complex flowfields by
revealing differences in the flow structures between the various cases studied. These
tests showed that there are significant differences between the acoustic near field and the
fluid dynamics generated by the Hartmann tube, which has a bearing on the use of
Hartmann tubes for flow control applications.

196
10.2 Recommendations
In addition to solving several basic and applied problems, this work has also revealed
new questions and opportunities for investigation. The mode-hopping behavior of the
fluidic oscillators at low flow rates is an intriguing effect that demands further study.
Three-dimensional flow visualization techniques are required for an extensive assessment
of the source of the mode-hopping behavior.
Other experimental methods such as particle image velocimetry (PIV) should be used
to investigate the internal fluid dynamics of the oscillator. PIV would reveal greater
insight into the dynamic vortical growth and decay that drives the oscillations. This data
would also serve as a good complement to the pressure-sensitive paint data acquired in
this work.
Further development work must be done with the new piezo-fluidic oscillator in order
to achieve the design goals of 100% modulation of a sonic jet at 1 kHz. These design
improvements will involve the creation of a more compact geometry and the selection of
piezo benders with a higher natural resonance frequency. Another design is also being
constructed that incorporates dual piezoelectric transducers positioned along the
converging region of the power nozzle. Both the piezo-fluidic and dual-frequency fluidic
oscillators will be applied to practical flow control problems such as jet thrust vectoring
and enhancement of mixing.
Further work with pressure-sensitive paints should focus on developing new sensing
techniques that will enhance the sensitivity for PSP in acoustic tests. The porous
pressure-sensitive paint formulations may also be applied to other nonlinear acoustic
problems such as shock waves used in thermoacoustic refrigeration. The effects of
temperature remain a significant issue when applying PSP to various tests, and new paint
formulations should be developed to further reduce or offset the temperature sensitivity.

LIST OF REFERENCES
197
LIST OF REFERENCES
1. Glezer, A. and Amitay, M., "Synthetic jets," Annual Review of Fluid Mechanics, Vol. 34, 2002, pp. 503-529.
2. Wiltse, J. M. and Glezer, A., "Direct excitation of small-scale motions in free shear flows," Physics of Fluids, Vol. 10, No. 8, 1998, pp. 2026-2036.
3. Wiltse, J. M. and Glezer, A., "Manipulation of free shear flows using piezoelectric actuators," Journal of Fluid Mechanics, Vol. 249, 1993, pp. 261-285.
4. Raman, G., Khanafseh, S., Cain, A. B., and Kerschen, E., "Development of high bandwidth powered resonance tube actuators with feedback control," Journal of Sound and Vibration, Vol. 269, No. 3-5, 2004, pp. 1031-1062.
5. Kastner, J. and Samimy, M., "Development and characterization of Hartmann tube fluidic actuators for high-speed flow control," AIAA Journal, Vol. 40, No. 10, 2002, pp. 1926-1934.
6. Gregory, J. W. and Sullivan, J. P., "Characterization of Hartmann Tube Flow with Porous Pressure-Sensitive Paint," AIAA 2003-3713, 33rd Fluid Dynamics Conference, American Institute of Aeronautics and Astronautics, Orlando, FL, 2003.
7. Roth, J. R., Sherman, D. M., and Wilkinson, S. P., "Electrohydrodynamic flow control with a glow-discharge surface plasma," AIAA Journal, Vol. 38, No. 7, 2000, pp. 1166-1172.
8. Stepaniuk, V., Sheverev, V., Otugen, V., Tarau, C., Raman, G., and Soukhomlinov, V., "Sound Attenuation by Glow Discharge Plasma," AIAA Journal, Vol. 42, No. 3, 2004, pp. 545-550.
9. Artana, G., D'Adamo, J., Leger, L., Moreau, E., and Touchard, G., "Flow control with electrohydrodynamic actuators," AIAA Journal, Vol. 40, No. 9, 2002, pp. 1773-1779.
10. Enloe, C. L., McLaughlin, T. E., VanDyken, R. D., Kachner, K. D., Jumper, E. J., and Corke, T. C., "Mechanisms and Responses of a Single Dielectric Barrier Plasma Actuator: Plasma Morphology," AIAA Journal, Vol. 42, No. 3, 2004, pp. 589-594.

198
11. Enloe, C. L., McLaughlin, T. E., VanDyken, R. D., Kachner, K. D., Jumper, E. J., Corke, T. C., Post, M., and Haddad, O., "Mechanisms and Responses of a Single Dielectric Barrier Plasma Actuator: Geometric Effects," AIAA Journal, Vol. 42, No. 3, 2004, pp. 595-604.
12. Magill, J. C. and McManus, K. R., "Exploring the feasibility of pulsed jet separation control for aircraft configurations," Journal of Aircraft, Vol. 38, No. 1, 2001, pp. 48-56.
13. M'Closkey, R. T., King, J. M., Cortelezzi, L., and Karagozian, A. R., "The actively controlled jet in crossflow," Journal of Fluid Mechanics, No. 452, 2002, pp. 325-335.
14. Chiekh, M. B., Bera, J. C., Michard, M., Comte-Bellot, G., and Sunyach, M., "Control of a plane jet by fluidic wall pulsing," AIAA Journal, Vol. 41, No. 5, 2003, pp. 972-975.
15. Rao, N. M., Feng, J., Burdisso, R. A., and Ng, W. F., "Experimental demonstration of active flow control to reduce unsteady stator-rotor interaction," AIAA Journal, Vol. 39, No. 3, 2001, pp. 458-464.
16. Saric, W. S. and Reed, H. L., "Effect of Suction and Weak Mass Injection on Boundary-Layer Transition," AIAA Journal, Vol. 24, No. 3, 1986, pp. 383-389.
17. Raghu, S. and Raman, G., "Miniature Fluidic Devices for Flow Control," FEDSM 99-7526, Proceedings of the ASME Fluids Engineering Division Summer Meeting, 1999.
18. Morris, N. M., An Introduction to Fluid Logic, McGraw-Hill, London, 1973, pp. 58-66.
19. Kirshner, J. M. and Katz, S., Design Theory of Fluidic Components, Academic Press, New York, 1975.
20. Raber, R. A. and Shinn, J. N., "Fluid Amplifier State of the Art, Vol. I: Research and Development - Fluid Amplifiers and Logic," NASA, Contractor Report CR-101, Oct. 1964.
21. Raber, R. A. and Shinn, J. N., "Fluid Amplifier State of the Art, Vol. II: Bibliography," NASA, Contractor Report CR-102, Oct. 1964.
22. Spyropoulos, C. E., "A Sonic Oscillator," Proceedings of the Fluid Amplification Symposium, Vol. III, Harry Diamond Laboratories, Washington, D.C., 1964, pp. 27-51.
23. Viets, H., "Flip-flop jet nozzle," AIAA Journal, Vol. 13, No. 10, 1975, pp. 1375-1379.

199
24. Stouffer, R. D., "Liquid Oscillator Device", U.S. Patent 4,508,267, Issued April 2, 1985.
25. Bowles Fluidics Corporation, http://www.bowlesfluidics.com/about/index.html, 2003, Accessed 5-29-2004.
26. Beale, R. B. and Lawler, M. T., "Development of a wall-attachment fluidic oscillator applied to volume flow metering," Flow: Its measurement and control in science and industry., Vol. 1, ISA, Pittsburgh, PA, USA, 1974, pp. 989-996.
27. Beale, Robert Bonine, "The Design of a Liquid Fluidic Reaction Jet System," M.S. Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, 1969.
28. Wang, H., Beck, S. B. M., Priestman, G. H., and Boucher, R. F., "Fluidic pressure pulse transmitting flowmeter," Chemical Engineering Research & Design, Transactions of the Institute of Chemical Engineers, Part A, Vol. 75, No. A4, 1997, pp. 381-391.
29. Raman, G., Raghu, S., and Bencic, T. J., "Cavity Resonance Suppression Using Miniature Fluidic Oscillators," AIAA 99-1900 (Also NASA/TM-1999-209074), 5th Aeroacoustics Conference, American Institute of Aeronautics and Astronautics, Seattle, WA, 1999.
30. Raman, G., Hailye, M., and Rice, E. J., "Flip-flop jet nozzle extended to supersonic flows," AIAA Journal, Vol. 31, No. 6, 1993, pp. 1028-1035.
31. Raman, G., "Using controlled unsteady fluid mass addition to enhance jet mixing," AIAA Journal, Vol. 35, No. 4, 1997, pp. 647-656.
32. Raman, G. and Cornelius, D., "Jet mixing control using excitation from miniature oscillating jets," AIAA Journal, Vol. 33, No. 2, 1995, pp. 365-368.
33. Raman, G., Packiarajan, S., Papadopoulos, G., Weissman, C., and Raghu, S., "Jet thrust vectoring using a miniature fluidic oscillator," FEDSM 2001-18057, Proceedings of the ASME Fluids Engineering Division Summer Meeting, Vol. 1, American Society of Mechanical Engineers, New Orleans, LA, 2001, pp. 903-913.
34. Coanda, Henri, "Device for Deflecting a Stream of Elastic Fluid Projected into an Elastic Fluid", United States Patent 2,052,869, Issued September 1, 1936.
35. Metral, A., "Sur un Phenomene de Deviation des Vienes Fluides et Ses Applications (Effet Coanda)," Proceedings of the 5th International Congress for Applied Mechanics, Cambridge, MA, 1939.
36. Raghu, Surya, "Feedback-Free Fluidic Oscillator and Method", U.S. Patent 6,253,782, Issued July 3, 2001.

200
37. Raman, G., Rice, E. J., and Cornelius, D. M., "Evaluation of flip-flop jet nozzles for use as practical excitation devices," Journal of Fluids Engineering, Transactions of the ASME, Vol. 116, No. 3, 1994, pp. 508-515.
38. Sakaue, H., Gregory, J. W., Sullivan, J. P., and Raghu, S., "Porous Pressure-Sensitive Paint for Characterizing Unsteady Flowfields," AIAA Journal, Vol. 40, No. 6, 2002, pp. 1094-1098.
39. Gregory, J. W., Sakaue, H., Sullivan, J. P., and Raghu, S., "Characterization of Miniature Fluidic Oscillator Flowfields Using Porous Pressure Sensitive Paint," FEDSM 2001-18058, post-deadline paper, Proceedings of the ASME Fluids Engineering Division Summer Meeting, New Orleans, LA, 2001.
40. Gregory, J. W., Sakaue, H., and Sullivan, J. P., "Fluidic Oscillator as a Dynamic Calibration Tool," AIAA 2002-2701, 22nd Aerodynamic Measurement Technology and Ground Testing Conference, American Institute of Aeronautics and Astronautics, St. Louis, MO, 2002.
41. Gregory, James W., "Unsteady Pressure Measurements in a Turbocharger Compressor Using Porous Pressure-Sensitive Paint," M.S. Thesis, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 2002.
42. Peterson, J. I. and Fitzgerald, R. V., "New Technique of Surface Flow Visualization Based on Oxygen Quenching of Fluorescence," Review of Scientific Instruments, Vol. 51, No. 5, 1980, pp. 670-671.
43. Kavandi, J., Callis, J., Gouterman, M., Khalil, G., Wright, D., Green, E., Burns, D., and McLachlan, B., "Luminescent barometry in wind tunnels," Review of Scientific Instruments, Vol. 61, No. 11, 1990, pp. 3340-3347.
44. Bell, J. H., Schairer, E. T., Hand, L. A., and Mehta, R. D., "Surface pressure measurements using luminescent coatings," Annual Review of Fluid Mechanics, Vol. 33, 2001, pp. 155-206.
45. Liu, T., Campbell, B. T., Burns, S. P., and Sullivan, J. P., "Temperature- and pressure-sensitive luminescent paints in aerodynamics," Applied Mechanics Reviews, Vol. 50, No. 4, 1997, pp. 227-246.
46. Liu, T. and Sullivan, J. P., Pressure and Temperature Sensitive Paints, Springer, New York, 2004.
47. Sakaue, Hirotaka, "Anodized Aluminum Pressure Sensitive Paint for Usteady Aerodynamic Applications," Ph.D. Dissertation, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 2003.

201
48. Asai, K., Iijima, Y., Kanda, H., and Kunimasu, T., "Novel Pressure-Sensitive Coating Based on Anodic Porous Alumina," 30th Fluid Dynamics Conference, Okayama, Japan (in Japanese), 1998.
49. Asai, K., Amao, Y., Iijima, Y., Okura, I., and Nishide, H., "Novel Pressure-Sensitive Paint for Cryogenic and Unsteady Wind Tunnel Testing," AIAA 2000-2527, 21st Aerodynamic Measurement Technology and Ground Testing Conference, American Institute of Aeronautics and Astronautics, Denver, CO, 2000.
50. Teduka, N., Kameda, M., Amao, Y., and Asai, K., "Experimental Investigation on the Time Response of Pressure-Sensitive Paint," Proceedings of the 31st JSASS Annual Meeting, 2000, pp. 218-221 (in Japanese).
51. Sakaue, H. and Sullivan, J. P., "Time response of anodized aluminum pressure-sensitive paint," AIAA Journal, Vol. 39, No. 10, 2001, pp. 1944-1949.
52. Sakaue, H., Sullivan, J. P., Asai, K., Iijima, Y., and Kunimasu, T., "Anodized aluminum pressure sensitive paint in a cryogenic wind tunnel," Proceedings of the 45th International Instrumentation Symposium, May 2-6 1999, Instrumentation in the Aerospace Industry : Proceedings of the International Symposium, Instrument Society of America, Albuquerque, NM, United States, 1999, pp. 337-346.
53. Baron, A. E., Danielson, J. D. S., Gouterman, M., Wan, J. R., Callis, J. B., and McLachlan, B., "Submillisecond response times of oxygen-quenched luminescent coatings," Review of Scientific Instruments, Vol. 64, No. 12, 1993, pp. 3394-3402.
54. Scroggin, A. M., Slamovich, E. B., Crafton, J. W., Lachendro, N., and Sullivan, J. P., "Porous polymer/ceramic composites for luminescence-based temperature and pressure measurement," Materials Research Society Symposium - Proceedings, Vol. 560, 1999, pp. 347-352.
55. Scroggin, Aaron M., "Processing and Optimization of Doped Polymer/Ceramic Composite Films for Luminescence-Based Pressure and Temperature Measurement in Aerodynamic Applications," M.S. Thesis, School of Materials Engineering, Purdue University, West Lafayette, IN, 1999.
56. Asai, K., Nakakita, K., Kameda, M., and Teduka, K., "Recent topics in fast-responding pressure-sensitive paint technology at National Aerospace Laboratory," ICIASF 2001 Record, 19th International Congress on Instrumentation in Aerospace Simulation Facilities, IEEE, Cleveland, OH, USA, 2001, pp. 25-36.
57. Gutmark, E. J. and Grinstein, F. F., "Flow control with noncircular jets," Annual Review of Fluid Mechanics, Vol. 31, 1999, pp. 239-272.
58. White, F. M., Fluid Mechanics, 5th ed., McGraw-Hill, Boston, 2003.

202
59. John, J. E. A., Gas Dynamics, 2nd ed., Prentice-Hall, Englewood Cliffs, NJ, 1984, pp. 416.
60. Sakaue, Hirotaka, "Anodized Aluminum Pressure Sensitive Paint for Usteady Aerodynamic Applications," Ph.D. Dissertation, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 2003.
61. Huang, C. Y., Sakaue, H., Gregory, J. W., and Sullivan, J. P., "Molecular Sensors for MEMS," AIAA 2002-0256, 40th Aerospace Sciences Meeting, American Institute of Aeronautics and Astronautics, Reno, NV, 2002.
62. Miller, D. N., Yagle, P. J., Bender, E. E., Smith, B. R., and Vermeulen, P. J., "A Computational Investigation of Pulsed Injection into a Confined, Expanding Crossflow," AIAA 2001-3026, 31st Fluid Dynamics Conference and Exhibit, American Institute of Aeronautics and Astronautics, Anaheim, CA, 2001.
63. Yagle, P. J., Miller, D. N., Bender, E. E., Smith, B. R., and Vermeulen, P. J., "A Computational Investigation of Pulsed Ejection," AIAA 2002-3278, 1st Flow Control Conference, American Institute of Aeronautics and Astronautics, St. Louis, MO, 2002.
64. Miller, W. V., "Experimental Feasibility Study of an Analog Electrical-to-Fluidic Transducer," IEEE Transactions on Industrial Electronics and Control Instrumentation, Vol. IECI-16, No. 1, 1969, pp. 50-58.
65. Tesar, V., "The Guided Jet Principle," Fluidics Quarterly, Vol. 3, No. 4, 1971, pp. 77-99.
66. Taft, C. K. and Herrick, B. M., "A Proportional Electro-Fluidic Pneumatic Valve Design," 20th Anniversary of Fluidics Symposium, American Society of Mechanical Engineers, New York, 1980, pp. 1-7.
67. Taft, C. K. and Herrick, B. M., "A Proportional Piezoelectric Electro-Fluidic Pneumatic Valve Design," Journal of Dynamic Systems, Measurement, and Control, Vol. 103, No. 4, 1981, pp. 361-365.
68. Chen, R. and Lucas, G. G., "Investigation into the use of piezo-fluidic combined units as fuel injectors for natural gas engines," Proceedings of the 1996 International Fall Fuels & Lubricants Meeting & Exposition, Oct 14-17 1996, SAE Special Publications, Vol. 1208, SAE, Warrendale, PA, USA, San Antonio, TX, USA, 1996, pp. 123-134.
69. Chen, R., "Piezo-fluidic gaseous fuel MPI system for natural gas fuelled IC engines," JSME International Journal, Series B: Fluids and Thermal Engineering, Vol. 44, No. 1, 2001, pp. 158-165.
203
70. Rockwell, D. and Naudascher, E., "Self-Sustained Oscillations of Impinging Free Shear Layers," Annual Review of Fluid Mechanics, Vol. 11, 1979, pp. 67-94.
71. Heller, H. H. and Bliss, D. B., "The Physical Mechanism of Flow-Induced Pressure Fluctuations in Cavities and Concepts for their Suppression," AIAA 75-491, 2nd Aeroacoustics Conference, American Institute of Aeronautics and Astronautics, Hampton, VA, 1975.
72. Komerath, N. M., Ahuja, K. K., and Chambers, F. W., "Prediction and Measurement of Flows over Cavities - A Survey," AIAA 1987-0166, 25th Aerospace Sciences Meeting, American Institute of Aeronautics and Astronautics, Reno, NV, 1987.
73. Colonius, T., "An Overview of Simulation, Modeling, and Active Control of Flow/Acoustic Resonance in Open Cavities," AIAA 2001-0076, 39th Aerospace Sciences Meeting and Exhibit, American Institute of Aeronautics and Astronautics, Reno, NV, 2001.
74. Stanek, M. J., Raman, G., Kibens, V., Ross, J. A., Odedra, J., and Peto, J. W., "Control of Cavity Resonance Through Very High Frequency Forcing," AIAA 2000-1905, 21st Aeroacoustics Conference, American Institute of Aeronautics and Astronautics, Lahaina, HI, 2000.
75. Cattafesta, L. N., III, Williams, D. R., Rowley, C. W., and Alvi, F. S., "Review of Active Control of Flow-Induced Cavity Resonance," AIAA 2003-3567, 33rd Fluid Dynamics Conference and Exhibit, American Institute of Aeronautics and Astronautics, Orlando, FL, 2003.
76. Raman, G., Mills, A., and Kibens, V., "Development of Powered Resonance-Tube Actuators for Aircraft Flow Control Applications," Journal of Aircraft, Vol. 41, No. 6, 2004, pp. 1306-1314.
77. Raman, G. and Raghu, S., "Cavity Resonance Suppression Using Miniature Fluidic Oscillators," AIAA Journal, Vol. 42, No. 12, 2004, pp. 2608-2612.
78. Raman, G., Envia, E., and Bencic, T. J., "Jet-Cavity Interaction Tones," AIAA Journal, Vol. 40, No. 8, 2002, pp. 1503-1511.
79. Mclachlan, B. G., Kavandi, J. L., Callis, J. B., Gouterman, M., Green, E., Khalil, G., and Burns, D., "Surface Pressure Field-Mapping Using Luminescent Coatings," Experiments in Fluids, Vol. 14, No. 1-2, 1993, pp. 33-41.
80. Masuda, T., Isobe, E., Higashimura, T., and Takada, K., "Poly[1-(Trimethylsilyl)-1-Propyne] - A New High Polymer Synthesized with Transition-Metal Catalysts and Characterized by Extremely High Gas-Permeability," Journal of the American Chemical Society, Vol. 105, No. 25, 1983, pp. 7473-7474.

204
81. Asai, K., Amao, Y., Iijima, Y., Okura, I., and Nishide, H., "Novel pressure-sensitive paint for cryogenic and unsteady wind-tunnel testing," Journal of Thermophysics and Heat Transfer, Vol. 16, No. 1, 2002, pp. 109-115.
82. Puklin, E., Carlson, B., Gouin, S., Costin, C., Green, E., Ponomarev, S., Tanji, H., and Gouterman, M., "Ideality of pressure-sensitive paint. I. Platinum tetra(pentafluorophenyl)porphine in fluoroacrylic polymer," Journal of Applied Polymer Science, Vol. 77, No. 13, 2000, pp. 2795-2804.
83. Kameda, M., Tezuka, N., Hangai, T., Asai, K., Nakakita, K., and Amao, Y., "Adsorptive pressure-sensitive coatings on porous anodized aluminium," Measurement Science & Technology, Vol. 15, No. 3, 2004, pp. 489-500.
84. Gregory, J. W., Sullivan, J. P., Raman, G., and Raghu, S., "Characterization of a Micro Fluidic Oscillator for Flow Control," AIAA 2004-2692, 2nd Flow Control Conference, American Institute of Aeronautics and Astronautics, Portland, OR, 2004.
85. Gregory, J. W., "Porous Pressure-Sensitive Paint for Measurement of Unsteady Pressures in Turbomachinery," AIAA 2004-0294, 42nd Aerospace Sciences Meeting, American Institute of Aeronautics and Astronautics, Reno, NV, 2004.
86. Maccallum, J. R. and Rudkin, A. L., "Novel Technique for Measuring the Diffusion Constant of Oxygen in Polymer-Films," European Polymer Journal, Vol. 14, No. 9, 1978, pp. 655-656.
87. Cox, M. E. and Dunn, B., "Oxygen Diffusion in Poly(Dimethyl Siloxane) Using Fluorescence Quenching .1. Measurement Technique and Analysis," Journal of Polymer Science Part A-Polymer Chemistry, Vol. 24, No. 4, 1986, pp. 621-636.
88. Carraway, E. R., Demas, J. N., and DeGraff, B. A., "Photophysics and Oxygen Quenching of Transition-Metal Complexes on Fumed Silica," Langmuir, Vol. 7, No. 12, 1991, pp. 2991-2998.
89. Mills, A. and Chang, Q., "Modeled Diffusion-Controlled Response and Recovery Behavior of A Naked Optical Film Sensor with A Hyperbolic-Type Response to Analyte Concentration," Analyst, Vol. 117, No. 9, 1992, pp. 1461-1466.
90. Yekta, A., Masoumi, Z., and Winnik, M. A., "Luminescence measurements of oxygen permeation and oxygen diffusion in thin polymer films," Canadian Journal of Chemistry-Revue Canadienne de Chimie, Vol. 73, No. 11, 1995, pp. 2021-2029.
91. Masoumi, Z., Stoeva, V., Yekta, A., Pang, Z., Manners, I., and Winnik, M. A., "Luminescence quenching method for probing the diffusivity of molecular oxygen in highly permeable media," Chemical Physics Letters, Vol. 261, No. 4-5, 1996, pp. 551-557.
205
92. Vasil'ev, V. V. and Borisov, S. M., "Optical oxygen sensors based on phosphorescent water-soluble platinum metals porphyrins immobilized in perfluorinated ion-exchange membrane," Sensors and Actuators B-Chemical, Vol. 82, No. 2-3, 2002, pp. 272-276.
93. Ruffolo, R., Evans, C. E. B., Liu, X. H., Ni, Y. Z., Pang, Z., Park, P., McWilliams, A. R., Gu, X. J., Lu, X., Yekta, A., Winnik, M. A., and Manners, I., "Phosphorescent oxygen sensors utilizing sulfur-nitrogen-phosphorus polymer matrixes: Synthesis, characterization, and evaluation of poly(thionylphosphazene)-b-poly(tetrahydrofuran) block copolymers," Analytical Chemistry, Vol. 72, No. 8, 2000, pp. 1894-1904.
94. Lu, X. and Winnik, M. A., "Luminescence quenching in polymer/filler nanocomposite films used in oxygen sensors," Chemistry of Materials, Vol. 13, No. 10, 2001, pp. 3449-3463.
95. Jayarajah, C. N., Yekta, A., Manners, I., and Winnik, M. A., "Oxygen diffusion and permeability in alkylaminothionylphosphazene films intended for phosphorescence barometry applications," Macromolecules, Vol. 33, No. 15, 2000, pp. 5693-5701.
96. Kneas, K. A., Demas, J. N., Nguyen, B., Lockhart, A., Xu, W. Y., and DeGraff, B. A., "Method for measuring oxygen diffusion coefficients of polymer films by luminescence quenching," Analytical Chemistry, Vol. 74, No. 5, 2002, pp. 1111-1118.
97. Liu, T., Teduka, N., Kameda, M., and Asai, K., "Diffusion timescale of porous pressure-sensitive paint," AIAA Journal, Vol. 39, No. 12, 2001, pp. 2400-2402.
98. Schairer, E. T., "Optimum thickness of pressure-sensitive paint for unsteady measurements," AIAA Journal, Vol. 40, No. 11, 2002, pp. 2312-2318.
99. Carroll, B. F., Abbitt, J. D., Lukas, E. W., and Morris, M. J., "Step response of pressure-sensitive paints," AIAA Journal, Vol. 34, No. 3, 1996, pp. 521-526.
100. Winslow, N. A., Carroll, B. F., and Kurdila, A. J., "Model development and analysis of the dynamics of pressure-sensitive paints," AIAA Journal, Vol. 39, No. 4, 2001, pp. 660-666.
101. Drouillard II, T. F. and Linne, M. A., "Luminescence Lifetime Response of Pressure-Sensitive Paint to a Pressure Transient," AIAA Journal, Vol. 43, No. 5, 2005, pp. 1100-1108.
102. Bird, R. B., Stewart, W. E., and Lightfoot, E. N., Transport Phenomena, Wiley, New York, 1960, pp. Chapter 16: Diffusivity and the Mechanisms of Mass Transport.

206
103. Stern, O. and Volmer, M., "Uber die Abklingungszeit der Fluoreszenz," Physikalische Zeitschrift, Vol. 20, No. 8, 1919, pp. 183-188.
104. Egami, Y., Iijima, Y., and Asai, K., "Hysteresis of Pressure-Sensitive Paint in Cryogenic Wind Tunnels," Proceedings of the 34th Fluid Dynamics Conference, Kochi University, Kochi, Japan (in Japanese), 2002.
105. Teduka, N., Kameda, M., Asai, K., Amao, Y., and Nakakita, K., "Adsorptive Pressure-Sensitive Coatings for Unsteady Flow Measurements," Transactions of the Japan Society of Mechanical Engineers.Series B., Vol. 68, No. 669, 2002, pp. 1391-1399.
106. Sakaue, Hirotaka, "Porous pressure sensitive paints for aerodynamic applications," M.S. Thesis, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 1999.
107. Jasra, R. V., Choudary, N. V., and Bhat, S. G. T., "Correlation of sorption behavior of nitrogen, oxygen, and argon with cation locations in zeolite X," Industrial & Engineering Chemistry Research, Vol. 35, No. 11, 1996, pp. 4221-4229.
108. Crawford, G. P., Steele, L. M., Ondris-Crawford, R., Iannacchione, G. S., Yeager, C. J., Doane, J. W., and Finotello, D., "Characterization of the cylindrical cavities of Anapore and Nuclepore membranes," Journal of Chemical Physics, Vol. 96, No. 10, 1992, pp. 7788-7796.
109. deBoer, J. H., The Dynamical Character of Adsorption, 2nd ed., Clarendon Press, Oxford, 1968, pp. 30-32.
110. Fonov, S. D., Engler, R. H., Klein, C., Mihailov, S. V., Mosharov, V. E., Kulesh, V. P., Radchenko, V. N., and Schairer, E., "Pressure sensitive paint for oscillating pressure fields measurements," ICIASF '99 Record: 18th International Conference on Instrumentation in Aerospace Simulation Facilities, Institute of Electrical and Electronics Engineers Inc., Piscataway, NJ, USA, Toulouse Cedex, France, 1999, pp. 24-1.
111. Asai, K., "Status of Pressure Sensitive Paint Technology at National Aerospace Laboratory," ICIASF 1999 Record, 18th International Congress on Instrumentation in Aerospace Simulation Facilities, IEEE, Toulouse, France, 1999.
112. Jordan, J. D., Weaver, W. L., Trump, D. D., Sarka, B., Goss, L. P., Navarra, K. R., and Neal Watkins, A., "Extending PSP technology for the investigation of HCF-related phenomena," Proceedings of the 45th International Instrumentation Symposium, May 2-6 1999, Instrumentation in the Aerospace Industry : Proceedings of the International Symposium, Instrument Society of America, Albuquerque, NM, United States, 1999, pp. 327-336.

207
113. Boerrigter, H. L. and Charbonnier, J. M., "Design and calibration of an unsteady pressure measurement system," ICIASF'97 Record. International Congress on Instrumentation in Aerospace Simulation Facilities, IEEE, Pacific Grove, CA, USA, 1997, pp. 185-194.
114. Davis, P. A. and Zasimowich, R. F., "High Frequency Dynamic Pressure Calibration Technique," Instrumentation in the Aerospace Industry: Proceedings of the 31st International Instrumentation Symposium, Vol. 31, ISA, Research Triangle Park, NC, USA, San Diego, CA, USA, 1985, pp. 59-91.
115. Sakamura, Y., Suzuki, T., Matsumoto, M., Masuya, G., and Ikeda, Y., "Optical measurements of high-frequency pressure fluctuations using a pressure-sensitive paint and Cassegrain optics," Measurement Science & Technology, Vol. 13, No. 10, 2002, pp. 1591-1598.
116. Bilaniuk, N., "Optical Microphone Transduction Techniques," Applied Acoustics, Vol. 50, No. 1, 1997, pp. 35-63.
117. Garthe, D., "Fiber- and integrated-optical microphones based on intensity modulation by beam deflection at a moving membrane," Sensors and Actuators A - Physical, Vol. A37 - A38, 1993, pp. 484-488.
118. Hu, A. and Cuomo, F. W., "Theoretical and experimental study of a fiber optic microphone," Journal of the Acoustical Society of America, Vol. 91, No. 5, 1992, pp. 3049-3056.
119. Vinogradova, E. L., Kapustina, O. A., Reshetov, V. N., Svet, V. D., and Yakovenko, G. N., "Characteristics of an optical microphone using a nematic liquid crystal," Soviet Physics - Acoustics, Vol. 31, No. 1, 1985, pp. 10-12.
120. McGraw, C. M., Shroff, H., Khalil, G., and Callis, J. B., "The phosphorescence microphone: A device for testing oxygen sensors and films," Review of Scientific Instruments, Vol. 74, No. 12, 2003, pp. 5260-5266.
121. Sakaue, Hirotaka, "Anodized Aluminum Pressure Sensitive Paint for Unsteady Aerodynamic Applications," Ph.D. Dissertation, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 2003.
122. Galaitsis, A. G., "Visualization of the Time-Average Pressure Distribution in a Rectangular Resonant Cavity," Journal of the Acoustical Society of America, Vol. 52, No. 5, part 2, 1972, pp. 1569-1571.
123. Chinnery, P. A., Humphrey, V. F., and Beckett, C., "The schlieren image of two-dimensional ultrasonic fields and cavity resonances," Journal of the Acoustical Society of America, Vol. 101, No. 1, 1997, pp. 250-256.

208
124. Smith, D. L., "Experimental Techniques for Acoustic Modal Analysis of Cavities," Inter-noise, 1976, pp. 129-132.
125. Nieter, J. J. and Singh, R., "Acoustic modal analysis experiment," Journal of the Acoustical Society of America, Vol. 72, No. 2, 1982, pp. 319-326.
126. Kung, C.-H. and Singh, R., "Experimental modal analysis technique for three-dimensional acoustic cavities," Journal of the Acoustical Society of America, Vol. 77, No. 2, 1985, pp. 731-738.
127. Knittel, J. D. and Oswald, L. J., "An Experimental Technique for Acoustic Modal Analysis in Three-Dimensional Cavities," SAE paper 870974, Society of Automotive Engineers, 1987, pp. 205-217.
128. Whear, F. R. and Morrey, D., "A technique for experimental acoustic modal analysis," Proceedings of the Institution of Mechanical Engineers.Part C, Journal of Mechanical Engineering Science, Vol. 210, No. c2, 1996, pp. 143-151.
129. Pierce, A. D., Acoustics - An Introduction to Its Physical Principles and Applications, Acoustical Society of America, Woodbury, NY, 1989, pp. 284-287.
130. Wanis, S., Sercovich, A., and Komerath, N. M., "Acoustic Shaping in Microgravity: Higher Order Surface Shapes," AIAA 99-0954, 37th Aerospace Sciences Meeting and Exhibit, American Institute of Aeronautics and Astronautics, Reno, NV, 1999.
131. Coppens, A. B. and Sanders, J. V., "Finite-amplitude standing waves within real cavities," Journal of the Acoustical Society of America, Vol. 58, No. 6, 1975, pp. 1133-1140.
132. Vanhille, C. and Campos-Pozuelo, C., "Numerical simulation of two-dimensional nonlinear standing acoustic waves," Journal of the Acoustical Society of America, Vol. 116, No. 1, 2004, pp. 194-200.
133. Gregory, J. W. and Sullivan, J. P., "The Effect of Quenching Kinetics on the Unsteady Response of Pressure-Sensitive Paint," AIAA Journal, 2005.
134. Liu, T., Guille, M., and Sullivan, J., "Accuracy of Pressure-Sensitive Paint," AIAA Journal, Vol. 39, No. 1, 2001, pp. 103-112.
135. Brown, Owen Clayton, "Low-Speed Pressure Measurements using a Luminescent Coating System," Ph.D. Dissertation, Department of Aeronautics and Astronautics, Stanford University, Stanford, CA, 2000.
136. Woodmansee, M. A. and Dutton, J. C., "Treating temperature-sensitivity effects of pressure-sensitive paint measurements," Experiments in Fluids, Vol. 24, 1998, pp. 163-174.

209
137. Klein, C., Engler, R. H., Fonov, S. D., and Trinks, O., "Pressure sensitive paint measurements on a wing model in a low-speed wind tunnel," ICIASF '99: 18th International Conference on Instrumentation in Aerospace Simulation Facilities, Jun 14-Jun 17 1999, ICIASF Record, International Congress on Instrumentation in Aerospace Simulation Facilities, Institute of Electrical and Electronics Engineers Inc., Piscataway, NJ, USA, Toulouse Cedex, France, 1999, pp. 22-1.
138. Subramanian, C. S., Amer, T. R., Oglesby, D. M., and Burkett, J., "New self-referencing pressure-sensitive-paint measurement," AIAA Journal, Vol. 40, No. 3, 2002, pp. 582-584.
139. Bell, J. H. and Mclachlan, B. G., "Image Registration for Pressure-Sensitive Paint Applications," Experiments in Fluids, Vol. 22, 1996, pp. 78-86.
140. Hartmann, J., "Om en ny Metode til Frembringelse af Lydsvingninger," Kongelige Danske Videnskabernes Selskab Matematisk-Fysiske Meddelelser, Vol. 1, No. 13, 1919.
141. Hartmann, J., "On a New Method for the Generation of Sound Waves," Physical Review, Vol. 20, 1922, pp. 719-727.
142. Hartmann, J. and Trolle, B., "New Investigation on the Air Jet Generator for Acoustic Waves," Kongelige Danske Videnskabernes Selskab Matematisk-Fysiske Meddelelser, Vol. 7, No. 6, 1926.
143. Hartmann, J. and Trolle, B., "A New Acoustic Generator. The Air-Jet-Generator," Journal of Scientific Instruments, Vol. 4, No. 4, 1927, pp. 101-111.
144. Hartmann, J. and Trolle, B., "Modus Operandi of the Air-Jet Pulsator," Kongelige Danske Videnskabernes Selskab Matematisk-Fysiske Meddelelser, Vol. 10, No. 4, 1930.
145. Hartmann, J., "On the Production of Acoustic Waves by means of an Air-jet of a Velocity exceeding that of Sound," The London, Edinburgh and Dublin Philosophical Magazine and Journal of Science, ser.7, Vol. 11, 1931, pp. 926-948, plates VII-XI.
146. Hartmann, J., "Construction, Performance, and Design of the Acoustic Air-Jet Generator," Journal of Scientific Instruments, Vol. 16, 1939, pp. 140-149.
147. Hartmann, J. and Lazarus, F., "The Radiation of the Acoustic Air-Jet Generator derived from direct Observation of the Amplitude of the Aerial Vibrations in the Oscillator," The London, Edinburgh and Dublin Philosophical Magazine and Journal of Science, ser.7, Vol. 29, 1940, pp. 140-147, plates VI-VIII.

210
148. Powell, A. and Smith, T. J. B., "Experiments Concerning the Hartmann Whistle," University of California, Los Angeles, UCLA Report 64-42, Los Angeles, CA, 1964.
149. Thompson, P. A., "Jet driven resonance tube," AIAA Journal, Vol. 2, No. 7, 1964, pp. 1230-1233.
150. Brun, E. and Boucher, R. M. G., "Research on acoustic air-jet generator: new development," Journal of the Acoustical Society of America, Vol. 29, No. 5, 1957, pp. 573-583.
151. Brocher, E., Maresca, C., and Bournay, M. H., "Fluid dynamics of the resonance tube," Journal of Fluid Mechanics, Vol. 43, No. pt.2, 1970, pp. 369-384.
152. Savory, L. E., "Experiments with Hartmann acoustic generator," Engineering, Vol. 170, No. 4411, 1950, pp. 136-138.
153. Hartmann, J. and Trudso, E., "Synchronization of Air-Jet Generators with an Appendix on the Stem Generator," Kongelige Danske Videnskabernes Selskab Matematisk-Fysiske Meddelelser, Vol. 26, No. 10, 1951.
154. Kurkin, V. P., "Sound Generated by a Gas Jet Siren," Soviet Physics - Acoustics, Vol. 7, No. 4, 1962, pp. 357-359.
155. Sprenger, H., "Ueber thermische Effeckte in Resonanzrohen," Mitteilungen aus dem Institut fuer Aerodynamik, Federal Institute of Technology, Zurich, Vol. 21, 1954, pp. 18-35.
156. Brocher, E. and Aridssone, J.-P., "Heating Characteristics of a New Type of Hartmann-Sprenger Tube," International Journal of Heat and Fluid Flow, Vol. 4, No. 2, 1983, pp. 97-102.
157. Kawahashi, M., Bobone, R., and Brocher, E., "Oscillation modes in single-step Hartmann-Sprenger tubes," Journal of the Acoustical Society of America, Vol. 75, No. 3, 1984, pp. 780-784.
158. Samimy, M., Kastner, J., and Debiasi, M., "Control of a High-Speed Impinging Jet using a Hartmann-Tube based Fluidic Actuator," AIAA 2002-2822, 1st AIAA Flow Control Conference, American Institute of Aeronautics and Astronautics, St. Louis, MO, 2002.
159. Gravitt, J. C., "Frequency response of acoustic air-jet generator," Journal of the Acoustical Society of America, Vol. 31, No. 11, 1959, pp. 1516-1518.
160. Morch, K. A., "Theory for mode of operation of Hartmann air jet generator," Journal of Fluid Mechanics, Vol. 20, No. Part 1, 1964, pp. 141-159.

211
161. Kawahashi, M. and Suzuki, M., "Generative mechanism of air column oscillations in a Hartmann-Sprenger tube excited by an air jet issuing from a convergent nozzle," Zeitschrift fur Angewandte Mathematik und Physik, Vol. 30, No. 5, 1979, pp. 797-810.
162. Smith, C. R., Sabatino, D. R., and Praisner, T. J., "Temperature sensing with thermochromic liquid crystals," Experiments in Fluids, Vol. 30, No. 2, 2001, pp. 190-201.
163. Jones, T. V., "The Use of Liquid Crystals in Aerodynamic and Heat Transfer Testing," Proceedings of the Fourth International Symposium on Transport Phenomena in Heat and Mass Transfer, 1992, pp. 1199-1230.
164. Hollingsworth, D. K., Boehman, A. L., Smith, E. G., and Moffat, R. J., "Measurement of temperature and heat transfer coefficient distributions in a complex flow using liquid crystal thermography and true-color image processing," Collected Papers in Heat Transfer 1989: Presented at the Winter Meeting of the ASME, Dec 10-15 1989, American Society of Mechanical Engineers, Heat Transfer Division, (Publication) HTD, Vol. 123, Publ by ASME, New York, NY, USA, San Francisco, CA, USA, 1989, pp. 35-42.
165. Campbell, B. T., Liu, T., and Sullivan, J. P., "Temperature Sensitive Fluorescent Paint Systems," AIAA 94-2483, 18th AIAA Aerospace Ground Testing Conference, American Institute of Aeronautics and Astronautics, Colorado Springs, CO, 1994.
166. Allison, S. W. and Gillies, G. T., "Remote thermometry with thermographic phosphors: instrumentation and applications," Review of Scientific Instruments, Vol. 68, No. 7, 1997, pp. 2615-2650.
167. Baughn, J. W., Byerley, A. R., Butler, R. J., and Rivir, R. B., "Experimental investigation of heat transfer, transition and separation on turbine blades at low Reynolds number and high turbulence intensity," Proceedings of the 1995 ASME International Mechanical Engineering Congress & Exposition, Nov 12-17 1995, American Society of Mechanical Engineers (Paper), ASME, New York, NY, USA, San Francisco, CA, USA, 1995, pp. 14.
168. Batchelder, K. A. and Moffat, R. J., "Surface flow visualization using the thermal wakes of small heated spots," Experiments in Fluids, Vol. 25, No. 2, 1998, pp. 104-107.
169. Rivir, R. B., Baughn, J. W., Townsend, J. L., Butler, R. J., and Byerley, A. R., "Thermal Tuft Fluid Flow Investigation Apparatus with a Color Alterable Thermally Responsive Liquid Crystal Layer", U.S. Patent 5,963,292, Issued October 5, 1999.

212
170. Byerley, A. R., Stormer, O., Baughn, J. W., Simon, T. W., and Van Treuren, K., "A 'cool' thermal tuft for detecting surface flow direction," Transactions of the ASME.Journal of Heat Transfer, Vol. 124, No. 4, 2002, pp. 594.
171. Butler, R. J., Byerley, A. R., Van Treuven, K., and Baughn, J. W., "The effect of turbulence intensity and length scale on low-pressure turbine blade aerodynamics," International Journal of Heat and Fluid Flow, Vol. 22, No. 2, 2001, pp. 123-133.
172. Byerley, A. R., Stormer, O., Baughn, J. W., Simon, T. W., Van Treuren, K. W., and List, J., "Using Gurney flaps to control laminar separation on linear cascade blades," Transactions of the ASME.The Journal of Turbomachinery, Vol. 125, No. 1, 2003, pp. 114-120.
173. Campbell, B. T., Crafton, J. W., Witte, G. R., and Sullivan, J. P., "Laser Spot Heating / Temperature-Sensitive Paint Heat Transfer Measurements," AIAA 98-2501, 20th AIAA Advanced Measurement Technology and Ground Testing Conference, American Institute of Aeronautics and Astronautics, Albuquerque, NM, 1998.
174. Campbell, B. T., "Aerodynamic Losses and Surface Heat Transfer in a Strut / Endwall Intersection Flow," Ph.D. Thesis, School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN, 1999.
175. Johnson, S. M., TPSX Material Properties Database, Web Edition Version 4.1, http://tpsx.arc.nasa.gov, 2003, NASA Ames Research Center, Moffett Field, CA, Accessed 4-23-2004.
176. Maya Simulation, The Thermal Wizard, http://www.mayahtt.com/tmwiz/, 1999, Maya Heat Transfer Technologies, Ltd., Montreal, Quebec, Accessed 4-23-2004.
177. Incropera, F. P. and DeWitt, D. P., Fundamentals of Heat and Mass Transfer, 4th ed., John Wiley & Sons, New York, 1996.
178. Fox, R. W. and McDonald, A. T., Introduction to Fluid Mechanics, 5th ed., John Wiley & Sons, New York, 1999.

APPENDICES

213
Appendix A: Flow Visualization with Laser-Induced Thermal Tufts
The laser-induced thermal tuft is a new flow visualization technique for simulating
traditional tufts with a thermal plume. A laser is used to heat a point of interest on a
wind-tunnel model, causing downstream convection of thermal energy from the heated
spot. A temperature-sensitive coating is used to visualize the thermal plume. This
technique can be used to indicate flow direction, locate regions of separated flow, and
detect laminar/turbulent transition. One primary advantage of thermal tufts is that the
measurement technique is less intrusive than traditional tufts. In addition, thermal tufts
may be generated at any optically-accessible point during a test, whereas string tufts must
be applied to specified locations before a test. This enables greater experimental
efficiency, which is particularly important in large-scale ground-testing facilities. This
work extends and develops the thermal tuft concept by employing temperature-sensitive
paint, as well as the previously used thermochromic liquid crystals. The effect of various
substrate materials on tuft quality is evaluated. Calibrations of tuft length dependency on
Reynolds number and laser power are made. Furthermore, a computational model is
developed to simulate the tuft shape and structure. Finally, a new variation of the
technique is presented, based on thermal ablation of the substrate material.
Nomenclature AR = tuft aspect ratio
Cp = specific heat (J/kg/K)
k = thermal conductivity (W/m/K)
l = tuft length (mm)
Rex = Reynolds number, based on distance from nozzle
T = temperature (K)
V = velocity (m/s)
w = tuft width (mm)
x = distance from nozzle to tuft (m)
μ = dynamic viscosity (kg/m/s)
ρ = density (kg/m3)

214
Introduction and Background
Thermal tufts are a relatively new flow-visualization technique, based on the
downstream convection of heat from a locally-heated spot. A traversable laser is used to
heat any optically-accessible point on the model. Temperature-sensitive coatings are
used to detect the thermal plume, while the orientation and shape of the plumes indicate
flow direction and speed. A typical example of a laser-induced thermal tuft is shown in
Figure A.1. Scientific-grade CCD cameras, or even consumer-grade digital cameras may
be used to visualize the flowfield. The technique is unique in that the tufts can be
positioned at any point on a model during a wind-tunnel run, without having to stop the
tunnel for model modification. This allows the experimentalist to maximize productivity
and enables detailed study of regions of interest in the flow. A second significant
advantage of thermal tufts over traditional tufts is the lack of flow interference. The
thermal tuft technique is relatively non-intrusive because the only model modification
required is the application of a thin layer of a temperature-sensitive coating. A diagram
representing the thermal tuft technique is shown in Figure A.2.
Figure A.1: Typical example of a laser-induced thermal tuft, indicating flow from left to right.
The key element of the thermal tuft technique is the sensing layer that coats the
model. The sensing layer can be comprised of thermochromic liquid crystals (TLC),
temperature-sensitive paint (TSP), or thermographic phosphors. Thermochromic liquid
crystals are a temperature-sensitive coating that changes color over a specific temperature
range. The typical progression in colors is from red to green to blue as temperature
increases. The color change may be recorded with any color camera, including
consumer-grade digital cameras. TLCs have commonly been used in aerodynamic

215
applications for measurement of surface temperature and heat transfer properties.162-164
Temperature-sensitive paint is another optical method for measuring surface temperature,
but this technique is based on a change in intensity of the emitted light from the
paint.45,165 An illumination source is required to excite the paint, and a scientific-grade
CCD camera is required to record the change in light level. The intensity of the TSP is
inversely proportional to the surface temperature. A third measurement technique is
thermographic phosphors.166 The experimental methods of the phosphor technique are
similar to temperature-sensitive paint techniques, involving a change of intensity. The
chemical sensor in phosphors produces phosphorescent emission, rather than the
luminescent emission of organic compounds used with TSP.
Figure A.2: Diagram of the thermal tuft concept.
The thermal tuft flow visualization technique was originally proposed in a paper by
Baughn et al. in 1995.167 In this work, they briefly described the laser-induced thermal
tuft method, and used the technique to detect boundary layer separation on a turbine
blade. Several years later, Batchelder and Moffat168 employed the thermal tuft technique
for visualization of flow direction about a cylinder. In this work, however, a laser was
not used to induce the thermal tufts. Instead, an array of heated pins contacted the
surface to generate the tufts on thermochromic liquid crystals. A complete description of

216
the laser-induced thermal tuft technique is in the U.S. Patent awarded to Rivir et al. in
1999.169 Byerley et al.170 created a new variation on the technique by generating cooled
thermal tufts, rather than heated spots. To accomplish this, they affixed reflective spots
on a model and heated the entire model with infrared heaters. Each reflective spot was
cool relative to the rest of the model, and a plume of cooler air created a tuft with a
temperature gradient opposite of the heated-spot technique. In addition to the
aforementioned applications, Butler et al.171 and Byerley et al.172 used the technique to
detect the location and size of a separation bubble on a turbine blade. In Byerley’s
work,172 they defined an eccentricity parameter to quantify the size and shape of the
thermal tuft.
At the time the work presented in this appendix was completed (2000), the authors
were unaware of the existence or prior development of the thermal tuft flow visualization
technique. The authors independently developed this method, based on their expertise in
thermal coatings. The idea in this case came from experiments using a laser spot with
temperature-sensitive paint for heat transfer measurements.173,174 This work builds upon
prior development in the following ways. Various substrate materials are evaluated for
their effect on the size and shape of the thermal tuft. Both flow velocity and incident
laser power affect the characteristics of the thermal tuft, and these effects are
characterized. For a constant laser power, this effectively allows velocity measurement
based on tuft length. A computational model was developed and is presented as a tool for
characterizing the effect of various parameters on tuft geometry. Furthermore,
temperature-sensitive paint is demonstrated as an alternative to thermochromic liquid
crystals as the sensing layer. The final contribution of this work is the demonstration of a
new variation of the thermal tuft technique based on ablation and downstream transport
of molten substrate.
Experimental Setup
A compressible nozzle facility was used to demonstrate the thermal tuft technique, as
shown in the experimental setup diagram in Figure A.3. A solid-state IR laser was used
to heat a spot in the flowfield. The IR laser has a wavelength of 1064 nm and a

217
maximum power output of approximately 277 mW. A variable neutral-density filter
wheel positioned at the laser output controlled the laser power. A Newport laser power
meter (818-SL) was used to measure the output power of the IR laser when attenuated
with the neutral density filter. The compressible nozzle was comprised of a 1.9 cm (3/4”)
jet nozzle, supplied with air from a plenum chamber. The plenum was supplied with
shop air and instrumented with a pressure transducer and thermocouple. The test sample
was placed at a 5° angle with respect to the axis of the nozzle exit. The shallow angle to
the freestream was used, rather than an angle of 0°, to generate longer tufts. Furthermore,
a jet impinging on a plate at a slight angle creates a spread of angular flow across the
surface, providing a more interesting flowfield for flow visualization.
Figure A.3: Diagram of the thermal tuft experimental setup.
The test specimen was a small sample of a temperature-sensing layer – either
temperature-sensitive paint (TSP) or thermochromic liquid crystals (TLC). The
temperature-sensitive paint formulation was composed of the Europium (III)
Thenoyltrifluoro-acetonate, 3-Hydrate (EuTTA) compound. The EuTTA compound was
chosen because it makes for a very bright paint. The EuTTA was mixed in equal parts of
paint thinner and a binder of model airplane dope. The paint was then applied to the

218
substrate by either spraying or brushing. If the TSP was brushed directly on the substrate,
a binder was unnecessary. The temperature-sensitive paint was applied to a heat-
absorbing layer, either black or gray tape in this case. For TSP measurements, an
ultraviolet light source excited the paint, and the tufts were imaged with a 12-bit
scientific-grade CCD camera. A set of optical filters were mounted on the camera lens to
remove the ultraviolet and IR light from the image. The filter set was comprised of a
590-nm long-pass filter for elimination of UV and a 1000-nm short-pass filter for IR.
The thermochromic liquid crystals used in these experiments were in sheet form,
Hallcrest model BM/R29C4W/C11/FA. Table A.1 indicates the color ranges of the
liquid crystals, corresponding to a 4°C bandwidth. This particular liquid crystal sheet
was composed of a black painted background, a layer of liquid crystals, and a 0.125 mm
thick Mylar sheet on top. The sheet has an adhesive backing, which was used to affix the
liquid crystals to an insulating substrate layer. A consumer-grade color digital camera
was used for imaging the thermal tufts, and ambient lighting was used for illumination.
Table A.1: Liquid crystal sheet temperature range.
Color Change Temperature (K) Black to Red 302 Red to Green 303 Green to Blue 306 Blue to Black 323
Results and Discussion
The quality of the thermal tufts is dependent on many parameters. When considering
the concept of the technique (shown pictorially in Figure A.2), the three most dominant
parameters are laser power, flow velocity, and substrate material. The substrate material
affects how much thermal energy is absorbed from the incident IR laser energy. The
radiative heat transfer will depend on the absorptivity of the substrate. The thermal
conductivity of the substrate also dictates the extent of radial conduction of thermal
energy away from the heated spot. An ideal substrate will absorb a large amount of
thermal energy, but conduct little radial heat away from the spot. This will produce a
heated spot with the highest temperature possible, while minimizing the radius of the

219
heated area on the surface. A small heated area will yield a tuft with a smaller radius and
larger aspect ratio (length / width). Similarly, the temperature of the heated spot should
increase with the incident laser power. The velocity of the freestream will have an effect
on the thermal boundary layer, transporting the heat downstream. The boundary layer
characteristics, whether laminar or turbulent, will also have an effect on the downstream
transport and dissipation of heat energy.
The following sections summarize the results from the development of the thermal
tuft technique. Several different substrate materials are evaluated, and qualitative
assessments are made on tuft quality. The responses of the tuft length and width to the
velocity and laser power parameters are characterized. A few experimental observations
are presented, demonstrating the utility of the thermal tuft technique. Furthermore, a
computational model is presented, that allows for evaluation of parameters such as laser
power, flow velocity and direction, etc. In the penultimate section, the thermal tuft
technique is extended to temperature-sensitive paint measurements. Finally, ablative
tufts are demonstrated as a new variation on the thermal tuft technique. The ultimate goal
of these experiments is to understand the mechanisms behind the generation of thermal
tufts, and to evaluate the relevant parameters to optimize the tuft shape.
Selection of Substrate Material
The choice of the substrate material has a significant affect on the quality and size of
the tuft that is generated by the infrared laser. Therefore, a comparison of the tufts
generated with various insulating layers gives an indication of the best material to select
for future experiments. The materials selected for this study are balsa wood on aluminum
sheet backing (oriented with-grain and cross-grain), corrugated cardboard, heavy paper (a
manila file folder), acrylic, plywood (oriented with-grain and cross-grain), a thin
aluminum sheet, and a thick aluminum plate. These materials were chosen due to their
availability, thermal conductivity characteristics, and their potential for use in a wind
tunnel environment. The thermal properties of each of these materials are listed in Table
A.2.175-177 The flow velocity for the substrate material comparisons was 4.9 m/s, and the
laser power was 277 mW.

220
Table A.2: Summary of substrate material thermal properties.
k (W/m/K) ρ (kg/m3) Cp (J/kg/K) Balsa Wood (across grain)175 0.0502 130 2300
Cardboard176 0.064 - - Plywood177 0.12 545 1215
Acrylic175 0.15 1200 1300 Manila Folder (paper)177 0.18 930 1340
Thin Aluminum Sheet (2024-T4)175 118 2780 837 Thick Aluminum Plate (2024-T6)175 177 2770 875
A qualitative comparison between the tufts on each substrate material can be made by
evaluating the images in Figure A.4. The best substrate material appears to be cardboard,
as shown in Figure A.4(b). Other noteworthy substrate materials are balsa wood (a) and
plywood (e and f). Not surprisingly, the substrate materials that provide the highest-
quality tufts are also materials that are inherently good insulators. The low thermal
conductivity of these materials mitigates the radial conduction of thermal energy away
from the laser-heated spot. Notice that both the aluminum sheet and the aluminum plate
produce poor results. This is unfortunate, since many models used in ground testing are
manufactured from metal such as aluminum or stainless steel. One potential solution is
to apply a supplementary insulating layer between the model and the thermochromic
liquid crystals. From a practical standpoint, balsa wood is one of the easiest insulating
materials to apply to a wind tunnel model. For this reason, balsa was used for subsequent
experiments studying the variation of laser power and flow velocity. One important
caveat regarding these results is worth mentioning. Due to limitations in the
experimental facility, it was difficult to position the substrate material in the exact same
position relative to the jet nozzle for each experiment. Thus, there may be a variation in
boundary layer characteristics between the various tests depicted in Figure A.4. The
general trends should be considered reliable, however.

221
Flow Direction
(a) Balsa, with-grain
(b) Corrugated cardboard
(c) Manila folder
(d) Acrylic
(e) Plywood, cross-grain
(f) Plywood, with-grain
(g) Thick aluminum plate
(h) Thin aluminum sheet
Figure A.4: Images of thermal tufts generated with various insulating substrate layers.
One interesting phenomenon is seen in the results for the plywood insulating material
(and also the balsa wood, to a lesser extent). The orientation of the wood grain clearly
affects the shape of the tuft. When Figure A.4(e) is compared with Figure A.4(f) for
plywood, it can be seen that the cross-grain orientation makes the tuft somewhat thicker
in the direction normal to the freestream. This increase in thickness is most likely due to
the anisotropic properties of wood. Thermal conductivity is greater in the grain direction
than the cross-grain direction. Thus, the cross-grain orientation of the wood enlarges the
width of the tuft. Since wider tufts are generally undesirable, the wood grain should be
oriented in a direction parallel to the freestream. A better solution is to use an insulating
material with isotropic thermal properties.

222
Thermal Tuft Response to Velocity Variation
The length of the thermal tufts will vary with respect to the freestream velocity, or
more appropriately, Reynolds number. The tuft geometry can be characterized by
measuring the length and width of the tuft, as shown in Figure A.5. The length (l) is
defined as the distance from the laser spot to the furthest location in the tail of the thermal
tuft. Width (w) is defined as the radius of the tuft, from the laser spot at the center to the
edge. The aspect ratio of the tuft is defined as
lARw
= , A.1
which is similar to the definition proposed by Byerley et al.172 The Reynolds number
associated with a particular flow velocity is calculated by
xVxRe ρμ
= , A.2
where μ is 1.846x10-5 kg/m/s, ρ is 1.152 kg/m3, and x (distance from the nozzle) is
8.34x10-3 m. The velocity for these experiments ranged from 10 up to 60 m/s. The laser
power was a constant 277 mW, with an ambient temperature of 300 K.
Figure A.5: Definition of length (l) and width (w) dimensions on a thermal tuft.
In this analysis, the tuft direction and length were subjectively determined using an
image-processing program. The accuracy of this method is relatively low, but it is
sufficient as an initial proof of concept. One possible improvement to the process would
be to develop an algorithm that determines the laser spot location, and automatically
dimensions the tuft.

223
The uncertainty in velocity measurements ranged from 0.015 to 5.6%, calculated
using the traditional uncertainty formulation found in Appendix F of Fox and
McDonald.178 The uncertainty in the tuft length is less rigorously quantified however.
Each image was analyzed twice to determine repeatability. Analysis shows that an error
of plus or minus 5 pixels in length is typical, corresponding to a measurement error of
plus or minus 0.4 mm. For long tufts at low speed, the edge of the tuft is fairly blurred,
making it difficult to accurately determine the edge. For short tufts (corresponding to
sharp temperature gradients), the edge of the tuft is more well-defined. Analysis of the
images produces data relating the effect of velocity on tuft length and width. This data is
plotted in Figure A.6, along with error bars for velocity and tuft length. This graph
shows that the tuft length decreases as the velocity increases and begins to flatten out at
velocities above about 40 m/s (Reynolds numbers of 20,000). A second order
polynomial curve fit appears to accurately represent the data (although an exponential fit
may fall within the error bars as well). There is not necessarily any physical significance
to the second order fit; rather the polynomial seems to follow the data trend well. The
tuft width is approximately linear and varies much less with velocity than the length,
indicating that this flow visualization technique is much more useful for low-speed flows.
The tuft length curve and tuft width curve should asymptotically approach one another as
speed increases. As the flow rate increases, the air convected from the heated laser spot
has less contact time with the liquid crystals downstream. Therefore, the effect of the
heated spot is not felt as far downstream at high speeds. In the limiting case, the velocity
is too high to cause the crystals to react at all, and the spot size becomes a function of
conduction only. In this case, the tuft length and width would be approximately equal
(AR = 1).
Thermal Tuft Response to Laser Power Variation
Similar experiments for evaluating the effect of incident laser power on the tuft length
reveal an increase in tuft length with laser power. A neutral-density filter wheel was used
at the laser output to attenuate the incident laser energy reaching the surface. The
incident energy was measured at each setting with a laser power meter. The flow

224
velocity was 4.9 m/s, and the ambient temperature was 299 K. The tuft length was
measured in the manner defined by Figure A.5.
Figure A.6: Response of tuft geometry to variation in Reynolds number. Velocity varies from 10 to 60 m/s and laser power is 277 mW.
Results from the laser power variation tests are shown in Figure A.7. Estimated error
in length measurements is the same as the previous case (plus or minus 0.4 mm), and the
accuracy of the power measurements is specified by the manufacturer as ± 3%. One
interesting feature of these results is that the highest laser power produces the longest
tufts with the highest aspect ratio. This is an intuitive result, since the high laser power
will create a large temperature difference between the model surface and the freestream.
Once can expect this temperature gradient to be advected further downstream.
A logarithmic fit is applied to both curves, but in two separate regions. There is a
discontinuity in the slope of the log fit at approximately 100 mW laser power. This
discontinuity is most likely due to melting of the Mylar layer that encapsulates the liquid
crystals, which was observed to occur at 100 mW power. When the Mylar layer melts,
the absorptivity characteristics of the layer must change, affecting the amount of thermal

225
energy imparted to the liquid crystals by the laser. Also, the melted Mylar layer may
introduce small disturbances in the boundary layer, which could affect the length of the
thermal tuft. The quality of the logarithmic fit is a striking feature of the relationship
between tuft length and incident laser power.
Figure A.7: Response of tuft geometry to variation in laser power. Velocity is held constant at 4.9 m/s.
Experimental Observations
Natural Convection The effects of natural convection are a potential source of error that must be
considered when making measurements with thermal tufts. This becomes an issue when
the model or surface being tested is mounted vertically, such that buoyancy forces are no
longer negligible. In the experiments presented in this work, the temperature-sensing
specimen was always mounted in the vertical orientation. An example of a thermal tuft
due to natural convection is shown in Figure A.8. This image represents a case with
quiescent flow conditions. The thermal boundary layer develops because of the

226
buoyancy of the less dense air in the heated region. Byerley, et al.170 have pointed out
that thermal tufts are particularly useful in vertical applications because the
experimentalist does not have to worry about dripping oil from other flow visualization
techniques. While this is true, the experimentalist must be aware of the effects of natural
convection. It was found that natural convection became negligible when the flow
velocity exceeded ~1 m/s. Even in higher-speed flows, however, regions of separated
flow may have very low local flow velocity and natural convection may dominate the
shape of a tuft.
Figure A.8: Thermal tuft at zero flow velocity, demonstrating the effect of natural convection.
Location of Reattachment
It is possible to use the thermal tuft technique to determine the location of separation
and reattachment regions in a flow. In one test, the heated laser spot was placed in a flow
reattachment region. This produced a tuft that actually propagates in two separate flow
directions, as shown in Figure A.9. By traversing the laser and observing the tuft(s), it is
possible to locate the reattachment point accurately. Separation and reattachment in fluid
dynamics are often unsteady phenomena. The thermal tuft technique, however, is
inherently a steady-state flow visualization method. The liquid crystals do not respond
quickly enough to indicate unsteady fluctuations in the flow. This is one limitation of the
thermal tuft method, as compared to traditional string tufts. This should be considered
when making measurements in separated flows or other unsteady flowfields.

227
Figure A.9: Thermal tuft at a flow reattachment point, indicating flow in opposite directions.
Computational Model
Physical Phenomena
The dominant heat transfer and fluid dynamics phenomena involved in the generation
of thermal tufts are shown in the schematic in Figure A.2. The incident radiation of the
laser beam is used to heat a small volume of the test sample. The amount of heat
absorbed by the test sample is dependent upon the absorptivity of the liquid crystal
sample. Heat is transferred away from the high-temperature region through two primary
methods. The undesirable heat transfer mechanism is due to conduction from the heated
spot in a radial direction through the liquid crystals and insulating layer. The size of the
heated spot depends on the flow speed of the freestream. As the freestream speed
increases, there is greater convection from the liquid crystal sheet, and the extent of the
conduction diminishes. A large conduction ring has an adverse effect on the aspect ratio
of the tuft. The desirable heat transport mechanism is convection of heat to the
freestream. This heat energy is then advected downstream and transfers back to the
liquid crystal sample by convection. The liquid crystals downstream of the heated spot
respond to the elevated temperature by changing color. This generates the color streak in
the liquid crystals that corresponds with the flow direction. This three-dimensional
system is difficult to model analytically, but can be effectively modeled numerically, as
discussed in the following section.

228
Icepak / FLUENT
To complement the experimental results and verify the analysis, a numerical model is
implemented using the Icepak computer program. Icepak is a FLUENT module
specifically designed for electronic component modeling. The goal of the numerical
simulation is to model the experimental setup to a reasonable degree of accuracy, and to
extract useful heat transfer information from the results. At this stage, the goal is not to
produce an accurate tuft length to compare with experimental tufts.
The computational domain (defined as a cabinet in Icepak) measures 25 cm by 16 cm
by 25 cm and is open on every face to ambient conditions (T=299 K). A circular fan with
diameter of 1.9 cm is used to model the nozzle. The fan induces no swirl, and produces a
constant volumetric flow rate of 0.09025 m3/s. This corresponds to a freestream velocity
of 10 m/s. Three plates model the composite test surface, each plate being 24 cm by 14
cm. The composite consists of a 0.125 mm thick Mylar surface coat attached to a 1.040
mm thick slab of balsa wood. A 0.533 mm thick 2024-T6 aluminum backing plate is the
third material. The composite surface is placed at the centerline of the fan to accurately
model the experimental conditions. The thermal properties of the materials are presented
in Table A.3.175,176 The conductivity of balsa wood is for a cross grain orientation. The
material is modeled as an isotropic substance, though it is truly anisotropic.
Table A.3: Thermal properties of backing materials.
k (W/m/K) ρ (kg/m3) Cp (J/kg/K) Balsa Wood (across grain)175 0.0502 130 2300
Mylar176 0.19 1100 2010 Thick Aluminum Plate (2024-T6)175 177 2770 875
The laser spot is modeled by a source on the Mylar surface, 12.7 mm downstream and
at the centerline of the fan. The source is 0.5 mm in diameter and produces 277 mW of
power. This power corresponds to the experimentally measured laser output. In the
experiment, not all of the power emitted by the laser is absorbed by test surface. In this
model however, it is assumed that all of the laser power is absorbed and converted to
thermal energy. This will affect the tuft length, but the general heat transfer
characteristics remain the same. The computational mesh has 150038 elements and

229
155984 nodes. The solution converged in about 200 iterations. The default convergence
criterion was used and an under relaxed solution technique was employed.
The numerically generated thermal tuft is shown in Figure A.10(a). The temperature
range in Figure A.10 corresponds to the temperature range of the thermochromic liquid
crystals. The computational tuft is very similar in form to the tufts produced
experimentally. There is a ring around the laser spot where conduction dominates and a
downstream streak produced by convection. The convection mechanism is described in
detail in the physical phenomena section. The tuft length is not relevant since the laser
power used to produce it is not replicated in experiment. The amount of laser power
absorbed by the liquid crystal layer in the experiments must be determined before the
numerical data can be directly compared to the experimental data.
Figure A.10(b) shows the effect of the heated spot on the air temperature, with the
view being a cross-section of the plate. The composite structure of the model can be seen
in the cross-section. It is clear that the air temperature above the laser spot is heated
locally above 50ºC. This hot air is then advected downstream, producing the streak in the
liquid crystals. The resolution in the wall-normal direction above the spot is low because
the grid in this region is coarse. A course grid in this region was chosen to reduce the
computational time required for convergence.
(a) Top view (b) Side view
Figure A.10: Numerical simulation of a thermal tuft with thermochromic liquid crystals and a balsa wood substrate with flow from left to right.
Temperature-Sensitive Paint Results
Temperature-sensitive paint (TSP) was evaluated as an alternative to thermochromic
liquid crystals (TLC). The primary advantage of TSP over TLC is expanded bandwidth.
The temperature range of liquid crystals is typically limited to about 5°C. Temperature-

230
sensitive paint, however, has a much higher bandwidth – often spanning over several
hundred degrees. The enhanced bandwidth characteristics allow the experimentalist to
record both the very high-temperature region at the laser spot, as well as the temperature
at the end of the tuft which is just above ambient. Another advantage of TSP is the fact
that an arbitrary temperature range is available. Thermochromic liquid crystals must be
tailor-made for a specific temperature range, but TSP allows for a flexible temperature
range when used with thermal tufts. The disadvantages of the TSP technique are that a
scientific-grade CCD camera is required, an ultraviolet light source is required for paint
excitation, and both wind-on and wind-off images must be acquired in order to compute
an intensity ratio of the image pair.
The temperature-sensitive paint experiments largely parallel the development with the
thermochromic liquid crystals. Thus, only example results will be shown to demonstrate
the concept. Typical TSP results of a thermal tuft are shown in Figure A.11. For this
test, the TSP was applied directly to a section of gray tape. The tape served as a layer
designed to absorb thermal energy from the incident laser light. The gray tape was
mounted over an air gap, an alternative to the insulating layers evaluated earlier. The air
gap was used because its thermal conductivity is very low (0.02624 W/m/K).176
Although an air gap produces excellent tufts, the use of this as an insulator on a typical
model in a wind tunnel facility is impractical. Notice that the aspect ratio of the tuft is
excellent – due in part to the use of an air gap insulator, and the high bandwidth of TSP.
Tufts with high aspect ratio were obtained with other insulating layers, even aluminum
sheeting. This indicates that the large bandwidth of temperature-sensitive paint is highly
advantageous.
Figure A.11: Temperature-sensitive paint results.
231
A New Concept: Thermally Ablative Tufts
As testing progressed with temperature-sensitive paint on gray tape, one interesting
variation was discovered. When high power from the incident laser was used, the tape
often melted in the region of the laser spot. This was also observed with the
thermochromic liquid crystals, when laser energy over 100 mW melted the Mylar layer.
The interesting feature with the TSP and gray tape, however, is that the molten tape
would often be transported downstream of the laser spot. As the molten tape moved
downstream, it would permanently change the intensity characteristics of the
temperature-sensitive paint by removing or covering the TSP dye. This effectively
created a permanent tuft that indicates flow direction. The downstream transport of
molten tape would often take several minutes to complete. Thus, this is a steady flow
visualization technique.
The most valuable aspect of this thermal ablation is the high aspect ratio of the tufts
that it generates. The width of the tuft is on the order of the laser spot diameter (less than
1 mm), but the transport length is approximately 10 to 20 diameters long, depending on
flow velocity. One striking example of the ablative tuft technique is shown in Figure
A.12. The laser spot was traversed to eight independent, equally-spaced locations along
the TSP surface. The line of laser spots was perpendicular to the axis of the impinging
jet. The spread of the jet impinging on the plate is clearly visible. Also striking is the
varying length of the ablative tufts, representing regions of varying velocity. Since
thermal ablation is involved, and the intensity characteristics of the paint are changed, the
ablative tufts produce a permanent change in the paint layer. The thermally ablative tuft
may have application to wind tunnel tests where a permanent record of flow velocity and
direction is desired, which can be examined and recorded closely after a run has been
completed.

232
Figure A.12: Thermally ablative tufts with temperature-sensitive paint with impinging flow from left to right.
Summary
This work has demonstrated the utility of thermal tufts as a flow visualization
technique. Various substrate materials were qualitatively evaluated for suitability;
cardboard, balsa, and plywood provided the best results since they are materials with low
thermal conductivity. The variation of tuft length with laser power and flow velocity was
characterized, with the tufts demonstrating a logarithmic relationship between laser
power and tuft length. The thermal tuft technique was applied to the visualization of
natural convection and flow separation / reattachment phenomena. Furthermore, a
computational model was developed that may be used to evaluate the tuft response to
parameters such as laser power, substrate material, substrate thickness, flow velocity, or
angle of attack. The thermal tuft technique was also extended to temperature-sensitive
paints, which provided better visualization results due to the high bandwidth of TSP.
Finally, a new variation of the thermal tuft technique was developed, based on the
ablation and downstream transport of molten substrate material. Thus, the laser-induced
thermal tuft technique is an excellent alternative to traditional flow visualization
techniques in ground-testing environments.

233
Appendix B: PSP Measurements with a High-Speed Camera
Most measurements with pressure-sensitive paint for unsteady flowfields involve
phase-locking techniques. This requires that the flowfield be repeatable and eliminates
the possibility of measuring one-time pressure transients. The alternative is to use a high-
speed camera with a frame rate fast enough to capture the unsteady phenomenon.
Modern high-speed cameras, however, typically do not have the bit-depth resolution
necessary for quality pressure-sensitive paint measurements. Colleagues in Japan at the
Tohoku University Department of Aeronautics and Space Engineering have a newly
developed 10-bit CCD camera with a 1-MHz frame rate, specially manufactured by
Shimadzu. This camera was used to record the real-time fluctuations of the fluidic
oscillator flowfield with pressure-sensitive paint. These tests serve as a proof-of-concept
that high-speed imaging can be effectively used for unsteady PSP measurements, as well
as a validation of the phase-locking technique for repeatable unsteady flowfields.
The test case involved a square-wave fluidic oscillator, the same device that is
characterized in Figure 7.14 and Figure 7.15. The fluidic oscillator was supplied with
nitrogen gas, producing an oscillation frequency of 1.04 kHz. Polymer/ceramic PSP was
used as the paint specimen, which was illuminated by two, large Hamamatsu LED arrays.
The imaging device was the Shimadzu high-speed camera, with a Hamamatsu A4539
image intensifier installed. The frame rate on the camera was 16 kHz, the camera gain
was set at 10x, and the image intensifier gain was set at 4.0. Each video frame had an
exposure time of half the sampling period. A Nikon 105-mm f/2.8 macro lens with a
Kenko 1.5x teleconverter was used for imaging. A Melles Griot long-pass filter with a
590-nm cutoff was used to filter out the excitation light. Signal-to-noise ratio is the
significant limiting factor on the data quality of these tests. Thus, these parameters and
equipment installation were established such that the light captured by the camera could
be maximized.
The resulting data from the high-speed camera tests is very noisy, despite the efforts
to maximize the signal-to-noise ratio. One example image from the fluidic oscillator
measurements is shown in Figure B.1. The structure of the jet is discernable, but the
random noise is significant. Spatial filtering can be employed to reduce the visible

234
structure of the noise in the same manner as used in the acoustic tests. Figure B.2 shows
the same data as Figure B.1, but with a circular disk filter with a radius of five pixels.
This filtering significantly reduces the noise level, but the edges of the jet remain fairly
jagged with many lingering artifacts of the high noise level.
The camera used in these tests offered very high-speed frame rates, but also had a
primary shortcoming. The gain of the camera was not constant in time. This variation in
gain is shown in Figure B.3. There are two sources of fluctuations in the camera gain.
The first is a ±3% variation due to power line source noise (50 Hz in Japan). The other,
more significant noise source is a 10% drop in gain on every 13th frame. Unfortunately,
these are inherent characteristics of the camera, and compensation methods must be
developed.
A series of PSP images recorded by the high-speed camera is shown in Figure B.4.
Here, the delay between images is 125 μs, and a spatial disk filter with 10-pixel radius
was used. A very fast switching time between the two extremes is observed in the bi-
modal jet distribution at ~ 1 kHz. These results compare favorably with the phase-
averaged PSP data presented in Figure 7.14 and Figure 7.15, yielding credibility to the
phase-averaging technique.
Figure B.1: Unfiltered PSP data from the high-speed camera.

235
Figure B.2: Filtered PSP data from the high-speed camera, with a disk radius of 5 pixels.
Figure B.3: Variation in the camera gain.
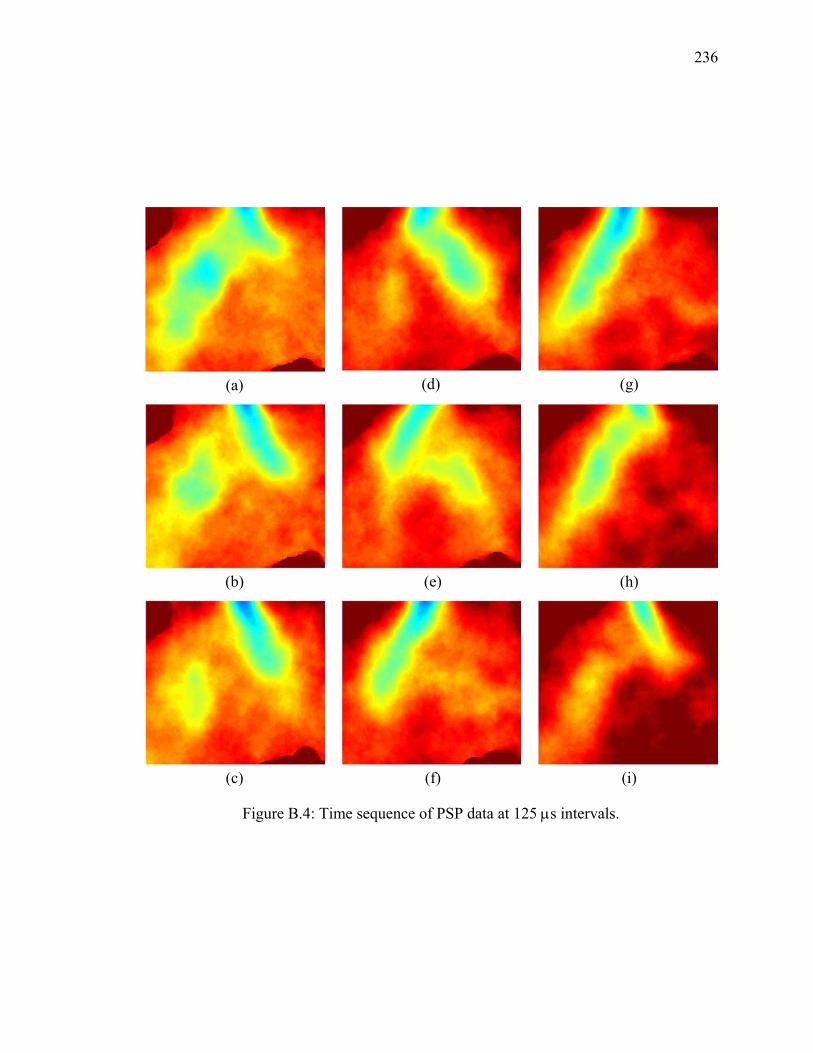
236
(a)
(d)
(g)
(b)
(e)
(h)
(c)
(f)
(i)
Figure B.4: Time sequence of PSP data at 125 μs intervals.

VITA

237
VITA
Jim Gregory received his Bachelor of Aerospace Engineering with highest honors in
1999 from the Georgia Institute of Technology. He received his M.S. in Aeronautics and
Astronautics in 2002 from Purdue University with a thesis entitled Unsteady Pressure
Measurements in a Turbocharger Compressor Using Porous Pressure-Sensitive Paint.
He won first place in the 2004 AIAA National Student Paper Competition with a paper
based on his Master’s thesis. He was also a recipient of the AIAA Orville and Wilbur
Wright Graduate Award in 2004. In August of 2005, he completed his Ph.D. work at
Purdue University under the direction of Prof. John Sullivan. His doctoral work was
funded by a NASA Graduate Student Researchers Program Fellowship through NASA
Glenn Research Center.
Dr. Gregory’s research interests include unsteady measurements with pressure-
sensitive paint, and development of flow control actuators such as the fluidic oscillator.
His short-term career goal is to pursue this research in a faculty position in aerospace
engineering at a prominent research university. In autumn of 2005 he will be a policy
fellow at the National Academies in Washington, DC through the Christine Mirzayan
Science & Technology Policy Graduate Fellowship Program. Dr. Gregory’s lifetime
forwarding e-mail address is [email protected].