Ćwiczenie nr 1 odpowiedzi czasowe układów...
TRANSCRIPT

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
Ćwiczenie nr 1Odpowiedzi czasowe układów dynamicznych
1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie studentów z metodą wyznaczania odpowiedzi skokowych oraz impulsowych podstawowych obiektów regulacji.
2. Wprowadzenie
Jeżeli dowolny proces, lub układ sterowania, znajduje się w stanie równowagi (o zerowych warunkach początkowych) i na jego wejście wprowadzi się jedno z wymuszeń podanych w Tablicy 1, to uzyskany przebieg sygnału wyjściowego tego procesu (układu) nazywa się charakterystyką dynamiczną czasową. Jeżeli wymuszenie miało przebieg zgodny z funkcją impulsową, to otrzymana odpowiedź nazywana jest charakterystyka dynamiczna impulsową. Jeżeli wymuszenie miało przebieg zgodny z funkcją skokową, to otrzymana charakterystyka dynamiczna czasowa nazywana jest odpowiedzią skokową. W praktyce najczęściej stosuje się charakterystyki skokowe. Charakterystyki impulsowe w wielu przypadkach są trudne do technicznego wykonania, mają bardziej znaczenie teoretyczne. Wymuszenia liniowo- lub parabolicznie- narastające stosuje się m. innymi do: identyfikacji właściwości dynamicznych procesów, testów, zapisu przebiegu wartości zadanej itp.
Z definicji charakterystyki dynamicznej czasowej wynika, że jest to odpowiedź układu, otrzymana dla zerowych warunków początkowych, na jedno z wymuszeń przedstawionych w tablicy 1. Określenie "obliczanie odpowiedzi układu" nawiązuje do sensu fizycznego zadania matematycznego, które jest rozwiązaniem równania różniczkowego dla określonych warunkówpoczątkowych. Te ogólnie określone "warunki początkowe" definiowały początkowy stan równowagi układu.
W ogólnym przypadku, dowolny jednowymiarowy układ liniowy, może być
rozpatrywany jako proces, zamknięty układ regulacji lub każdy inny dowolny układ, można
� �opisać transmitancją operatorową ( ) o pierwszej postaci kanonicznej w sposób:
G ( s)=bm s
m+bm− 1 sm− 1+ ...+b1 s+b0
an sn+an− 1 s
n− 1+...+a1s+a
0
,n≥m (1.1)
� �Wobec tego odpowiedź układu, tj. transformata sygnału wyjściowego ( ) wynosi
(1.2) a oryginał tego sygnału przedstawia się w sposób:
(1.3)
�W celu obliczenia odpowiedzi określonego układu w funkcji czasu (t) - oryginału funkcji,
�konieczna jest znajomość: wymuszenia (t), transmitancji operatorowej G(s) oraz warunków
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
y (t )=L−1 [X (s )⋅G (s ) ] .
Y ( s)=X (s )⋅G (s )

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
�początkowych, w których znajduje się układ w chwili wprowadzania wymuszenia (t). Transmitancje
operatorowe typowych obiektów regulacji znajdują się w Tabeli 2.
3. Obliczanie odpowiedzi skokowej
Rozpatrzona zostanie postać ogólna odpowiedzi układ o transmitancji (1.1), otrzymana dla wymuszenia skokowego:
(1.4)
(1.5)
oraz zerowych warunków początkowych.
Zgodnie z zależnością (1.2) otrzyma się:
(1.6)
� � � �Gdyby transmitancja operatorowa ( ) miała postać funkcji elementarnej, to przebieg ( )
można byłoby odczytać bezpośrednio z tablic transformat.
Y ( s)=xst( A0
s−s0
+A1
s−s1
+A2
s−s2
+...+Ak
s−sk+
B1
s−sk+1+
B2
(s− sk+1)2+...+
Bm
(s− sk+m)m+...)= L (s)
M ( s)
(1.7)
�Najbardziej ogólny przypadek dotyczy równania charakterystycznego, które posiada
� �pierwiastków jednokrotnych (zarówno rzeczywistych jak i zespolonych sprężonych) oraz −
pierwiastków wielokrotnych. Wówczas zależność (1.6) może być zapisana w sposób:
y (t )=xst (A0e−s0 t+A1 e−s1 t+A2 e− s2 t+...+Ak e−sk t+B1 e−sk+1⋅t+B2 t e−sk+1⋅t+ ...+Bm tm e−sk+1⋅ t+...)
(1.9)4. Odpowiedź impulsowa
Dla przypadku ogólnego, charakterystykę impulsową układu, otrzymuje się dla wymuszenia:
(1.10)
(1.11)
oraz zerowych warunków początkowych.Zgodnie z zależnością (1.2) otrzyma się:
(1.12)
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
x ( t )=xst 1(t ) ,
X (s)=1,
X (s)=xst
s,
Y ( s)=xst
s
bm sm+bm−1 s
m−1+...+b1 s+b0an s
n+a(n−1) sn− 1+...+a
1s+a
0
, n≥m
x ( t )=δ (t ) ,
Y ( s)=bm s
m+bm−1 sm−1+...+b1 s+b0
an sn+a(n−1) s
n−1+...+a1s+a
0
,n≥m

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
gdzie:
� �( ) - licznik transformaty Y(s)
�( ) - mianownik transformaty Y(s)
W celu wyznaczenia oryginału funkcji(1.12) należy postępować analogicznie jak w przypadku
odpowiedzi skokowej .
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Tabela 1. Zestawienie typowych sygnałów wymuszających
:

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Tabela 1: Zestawienie równań oraz charakterystyk skokowych członów dynamicznych [2]

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
5. Przebieg ćwiczeniaStudent ma za zadanie wyznaczyć odpowiedzi skokowe i impulsowe dla:
• Element o właściwościach proporcjonalnych (k=5)• Element o właściwościach całkujących idealnych (T=5)• Element o właściwościach całkujących rzeczywistych (k=2, T=5)• Element o właściwościach różniczkujących rzeczywistych (k=5, T=2)• Element o właściwościach inercyjnych I-go rzędu (k=6, T=3)• Element o właściwościach inercyjnych II-go rzędu (k=8, T1=1, T2=4)• Element o właściwościach oscylacyjnych (k=5, T=2, ξ=0 ξ =0.2 ξ =0.6 ξ =1) (Cztery
przypadki)• Element o właściwościach opóźniających (k=2, τ =5)
Dodatkowo:• Wyznaczyć odpowiedź skokową układu złożonego z dowolnej kombinacji trzech wyżej
wymienionych elementów. 6. Przykładowy sposób realizacji zadania
Chronologicznie:-pierwszym krokiem ćwiczenia jest utworzenie nowego katalogu w lokalizacji pulpit,
katalog proszę nazwać swoim imieniem i nazwiskiem,-następnie należy utworzyć kolejny katalog we wcześniej utworzonym katalogu, o
nazwie „Ćwiczenie nr 1”,-uruchomić program Scilab,-uruchomić moduł Xcos poprzez wpisanie komendy „xcos” w konsoli programu Scilab,
Komentarz: Powoduje to uruchomienie dwóch okien: przeglądarki palet (biblioteka
wszystkich możliwych bloków używanych w symulacji), okno projektu (okno w którym dodaje
się i łączy ze sobą bloki z przeglądarki palet w celu uzyskania wymaganego algorytmu).
-zapisać pusty projekt xcos we wcześniej utworzonym folderze pod dowolną nazwą,-następnie z biblioteki „Systemy czasu ciągłego” należy wprowadzić bloczek CLR
(reprezentuje on transmitancje operatorową G(s)) i wprowadzić go do przestrzeni roboczej (rys1) poprzez „przeciągnięcie bloku”.
-następnie z biblioteki „źródła” należy wprowadzić blok STEP_FUNCTION (wymuszenie skokowe) oraz Clock_c (umożliwi to wizualizacje przebiegów funkcji).
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Kolory następnych przebiegów
Rysunek 1: Schemat przedstawiający zasadę generowania oraz wizualizacji
sygnału

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
-z biblioteki „sinks” należy wprowadzić blok CSCOPE a z biblioteki „powszechnie
stosowany” blok funkcję MUX. Należy połączyć układ jak na rys. 3,
-dwukrotnie klikając lewym przyciskiem myszy należy wejść w ustawienia bloku CLR, w
liczniku funkcji (ang. Numerator) wprowadzamy wartość 1, natomiast w mianowniku (ang.
denominator) wprowadzamy wartość 1*s+1. Za modelowany został w ten sposób obiekt
inercyjny pierwszego rzędu o wzmocnieniu k=1 oraz inercji T=1(rysunek 3).
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Rysunek 3: Schemat przedstawiający odpowiedź skokową
Rysunek 2: Przestrzeń robocza; po lewej przeglądarka palet, po prawej pole robocze
Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
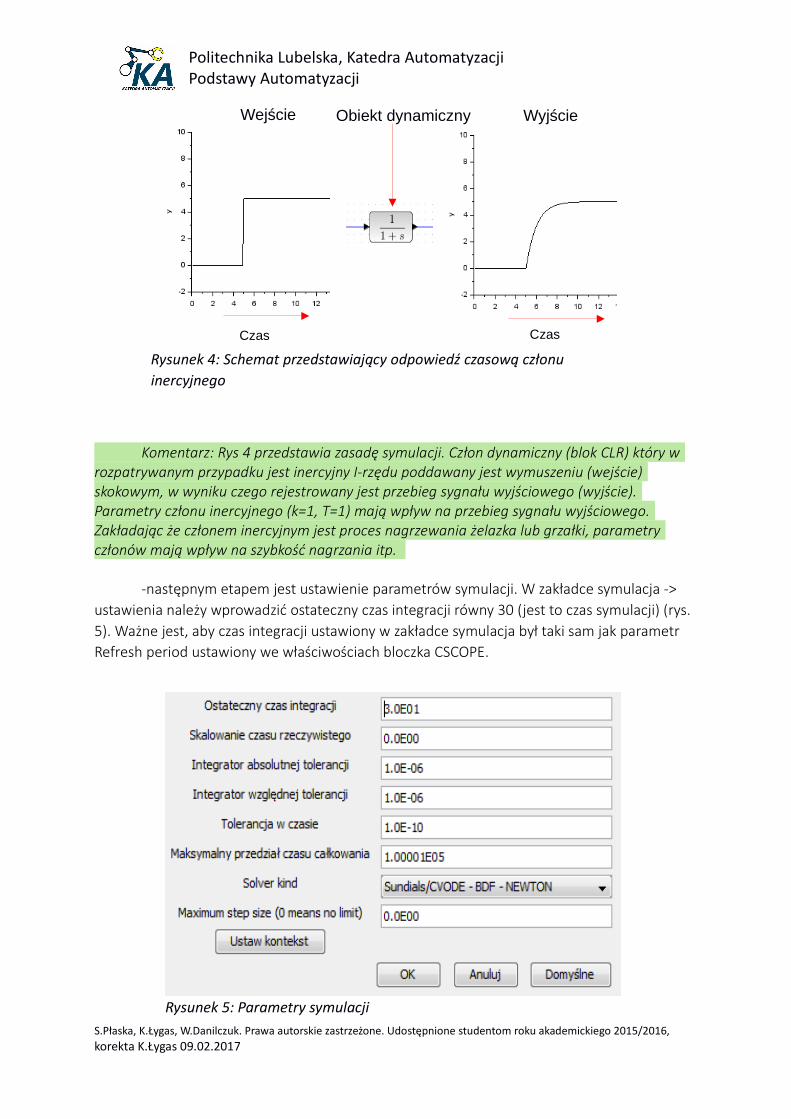
Komentarz: Rys 4 przedstawia zasadę symulacji. Człon dynamiczny (blok CLR) który w
rozpatrywanym przypadku jest inercyjny I-rzędu poddawany jest wymuszeniu (wejście)
skokowym, w wyniku czego rejestrowany jest przebieg sygnału wyjściowego (wyjście).
Parametry członu inercyjnego (k=1, T=1) mają wpływ na przebieg sygnału wyjściowego.
Zakładając że członem inercyjnym jest proces nagrzewania żelazka lub grzałki, parametry
członów mają wpływ na szybkość nagrzania itp.
-następnym etapem jest ustawienie parametrów symulacji. W zakładce symulacja ->
ustawienia należy wprowadzić ostateczny czas integracji równy 30 (jest to czas symulacji) (rys.
5). Ważne jest, aby czas integracji ustawiony w zakładce symulacja był taki sam jak parametr
Refresh period ustawiony we właściwościach bloczka CSCOPE.
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Rysunek 4: Schemat przedstawiający odpowiedź czasową członu
inercyjnego
Wejście WyjścieObiekt dynamiczny
Czas Czas
Rysunek 5: Parametry symulacji

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
-po naciśnięciu przycisku start symulacja zostanie uruchomiana i wygenerowany zostanie
przebieg przedstawiający odpowiedź skokową za modelowanego układu (rys. 4).
-następnie należy wygenerować wymuszenie (wejście) impulsowe, w tym celu należy
dodać dwa bloki funkcji skokowej przesunięte od siebie o małą wartość czasu (np. 0.001
sekundy), oraz człon sumacyjny (o parametrze odejmowania)
- celem ćwiczenia jest przeprowadzenie symulacji odpowiedzi skokowych oraz impulsowych
określonych członów dynamicznych, w tym celu najlepiej z wizualizować wszystkie przebiegi w
jednym bloku CMSCOPE, w tym celu należy utworzyć model jak przedstawiono na rys 7.
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Rysunek 6: przedstawienie wygenerowania sygnału impulsowego
Człon sumujący
Odejmowanie

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
przebieg przedstawiający odpowiedź skokową za modelowanego układu (rys. 8).
Wynik symulacji przedstawiono na rys 8.
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017
Rysunek 8: Wynik symulacji; wykres górny: odpowiedź skokowa (zielony- wymuszenie
(wejście), czarny- odpowiedź układu (wyjście); odpowiedź impulsowa (czerwony-
wymuszenie (wejście)), zielony - odpowiedź układu (wyjście))
Odpowiedź skokowa
Odpowiedź impulsowa
Czas

Politechnika Lubelska, Katedra Automatyzacji
Podstawy Automatyzacji
Komentarz: Uzyskane wykresy przedstawiają odpowiedź skokową oraz impulsową
członu inercyjnego pierwszego rzędu. Przykładem może być proces nagrzewania grzałki, gdzie
sygnał wymuszający skokowy (wejście) przedstawia załączenie zasilania grzałki np. w jednostce
Voltów, zaś odpowiedzią układu jest zmiana temperatury grzałki (wyjście / odpowiedź
skokowa) . Po upływie pewnej ilości czasu temperatura przestaje się zmieniać. Parametry
członu inercyjnego takie jak k (wzmocnienie) oraz T (stała czasowa) określają relację pomiędzy
wartością zadaną napięcia a uzyskaną temperaturą (k), oraz czas nagrzewania (T).
7. Sprawozdanie i pytania kontrolneSprawozdanie powinno zawierać:
-cel ćwiczenia,- przebieg ćwiczenia (odpowiedź skokową i impulsową wszystkich elementów z
punktu 5.) -dla wszystkich uzyskanych przebiegów (przypadków) należy podać związek
przyczynowo skutkowy (jak w komentarzu powyżej), wyjaśniając zrozumienie relacji,
8. Pytania Kontrolne:1. Definicja charakterystyki dynamicznej czasowej. 2. Różnica miedzy charakterystyką skokową a impulsową.3. Narysować przebieg charakterystyki skokowej wybranego elementu. Opisać
osie. 4. Narysować przebiegi typowych wymuszeń oraz zapisać ich funkcję.5. Wyjaśnić działanie następujących bloków: STEP_FUNCTION, CSCOPE,
CMSCOPE, BIGSOM_f.
5 Literatura
1. Marek Żelazny „Podstawy Automatyki”
2. Janusz Kowal „Podstawy Automatyki”
S.Płaska, K.Łygas, W.Danilczuk. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016,
korekta K.Łygas 09.02.2017