curso fundamentos rf parte 1
DESCRIPTION
sistemas de comunicacion rfTRANSCRIPT

º
INGENIERÍA EN ELECTRÓNICA Y COMUNICACIONES.
CURSO: FUNDAMENTOS DE SISTEMAS ELECTRÓNICOS DE RADIOCOMUNICACIÓN.
INTEGRANTES: Jeny Mendoza ZapataAdrian Flores Rivera
Oscar Delgado de la RosaOscar Perez
INSTRUCTOR: M.I. Francisco Gerardo Hernández Rivera.
TEMARIO DEL CURSOPARTE 1

º
Índice.
1. Introducción a las telecomunicaciones.
2. Análisis en el tiempo y frecuencia de señales electromagnéticas.
3. Parámetros básicos de sistemas de radiofrecuencia.
4. Modulaciones y demodulaciones analógicas.
5. Modulaciones y demodulaciones digitales.
6. Pruebas de transmisores, receptores y conectores.
7. Resumen Sistemas de Comunicaciones Electrónicas Tomasi
8. Sugerencias de equipamiento para laboratorio de pruebas de RF.

º
1. Introducción a las telecomunicaciones.
1.1 Introducción.
Aunque los sistemas de telecomunicación inalámbrica evolucionan de manera verti-
ginosa, los principios físicos y técnicas básicas de uso que rigen su funcionamiento
han sido únicamente optimizados, y al menos su servidor ve a la radiofrecuencia
como una opción para la comunicación a distancia que no dejará de estar presente
en la vida moderna del ser humano. La gran cantidad de avances en el procesa-
miento digital de señal, la caída en el costo de los componentes electrónicos y ma-
nufactura de circuitos impresos, así como la optimización en el uso de la energía
eléctrica utilizada por dispositivos de telecomunicación, han permitido llenar nuestro
entorno de una gran cantidad de dispositivos que de manera automática forman re-
des inalámbricas configurados por diversos protocolos, frecuencias, cobertura y
aplicaciones. La infraestructura necesaria para enlazar los dispositivos de comuni-
cación y cómputo móvil es parte del plan estratégico de desarrollo de todos los paí-
ses. Aunado a la creciente ola de dispositivos inalámbricos que se suman al IoT (In-
ternet of Things) es necesario que el ingeniero de la actualidad tenga los fundamen-
tos mínimos necesarios para entender al menos de manera general la interacción
entre los sistemas de telecomunicación inalámbricos.
1.2 Elementos de un sistema de transmisión de radiofrecuencia.

º
1.2.1 Diagrama general de sistema de transmisión de Shannon.
Figura 1. Diagrama a bloques simplificado de un sistema de comunicaciones.
Fuente de información: Dispositivo que envía mensaje o secuencia de mensajes que deben ser recibidos por el destino. Generalmente son funciones de tiempo f(x,t) o f(L,R,t) como el audio monoaural o estéreo. O bien pueden tener coordenadas espaciales y temporales como el video f(x,y,L,R,t).
Transmisor: Dispositivo que manipula el mensaje de manera tal que produce una señal apta para su transmisión a través del canal.
Canal: Se le define así al medio físico utilizado para transmitir el mensaje al receptor.
Receptor: Dispositivo que manipula la señal enviada a través del canal de manera inversa al transmisor para poder reconstruir el mensaje.
Destino de información: Persona o equipo para el que está designado el mensaje.
Fuente de ruido: Señal aleatoria que se suma algebraicamente a la señal del mensaje transmitido generando la probabilidad de crear errores en el receptor al reconstruir el mensaje.

º
1.2.2 Diagrama general de radiotransmisor analógico directo.
Figura 2. Diagrama a bloques de un radiotransmisor análogo.
Acondicionador de señal: etapa que acondiciona la variable de entrada a los valores de voltaje y corriente que el transmisor requiere para hacer una correcta modulación.
Oscilador: Circuito electrónico que inyecta una señal senoidal de alta estabilidad que será manipulada por el modulador y/o el sintetizador. Esta señal, generalmente de mucha mayor frecuencia en relación a la señal de banda base, se le conoce como portadora.
Sintetizador: Circuito electrónico que puede ser configurado para generar múltiples frecuencias senoidales en base a la señal del oscilador. Es decir, en base al oscilador, genera portadoras de diversas frecuencias.
Modulador: Etapa del transmisor en la cual se manipula una o varias características de la señal senoidal en relación directa con el mensaje acondicionado. En base al mensaje, se modifica la amplitud, frecuencia, y/o fase de la señal portadora proveniente del oscilador y/o sintetizador.
Amplificador de potencia: Etapa que inyecta tanto voltaje como corriente a la portadora modulada para poder transmitirla exitosamente a la distancia requerida por la aplicación.
Red de acoplamiento: Conjunto de elementos eléctricos activos y/o pasivos insertados con el objetivo de transferir la máxima potencia del amplificador de potencia a la antena de transmisión.
Antena: Elemento pasivo que irradia la potencia del transmisor en forma de ondas electromagnéticas.

º
1.2.3 Diagrama general de radiotransmisor digital.
Como podemos observar en el siguiente diagrama, la cantidad de etapas se ha incrementado considerablemente, por lo que nos limitaremos a explicar las etapas agregadas.
Figura 3. Diagrama a bloques de un radiotransmisor digital.
CODEC: Circuito integrado que codifica y decodifica el mensaje para optimizar su transmisión. El mismo dispositivo es utilizado tanto en el transmisor como en el receptor.Cifrado: Proceso digital que aplica un código o chip que reemplaza el mensaje original por una secuencia pseudoaleatoria de datos que sólo puede ser traducida por el receptor que posea el mismo código o chip en su dispositivo de radiocomunicación.Modulador IF: Dado que las tecnologías actuales utilizan portadoras de muy alta frecuencia y están integrados a sistemas con microprocesadores, intervienen factores relacionados al procesamiento de señal digital. El modulador IF manipula la portadora de acuerdo a los límites del sistema digital, uno de ellos siendo el Teorema de Nyquist.Preamplificador IF: Una vez hecha la modulación de frecuencia intermedia (IF) se vuelve a acondicionar la señal resultante en niveles análogos y/o digitales para volverla a procesar.Upconverter: Esta etapa es básicamente un multiplicador de frecuencia que recorre el ancho de banda de IF al ancho de banda en el que va a ser transmitida la señal.

º
1.3 Elementos de un sistema de recepción de radiofrecuencia.
1.3.1 Diagrama general de radiocomunicaciones analógicas.
1.3.2 Diagrama general de radiocomunicaciones digitales.
Downconverter: Etapa que detecta altas frecuencias y genera frecuencias proporcional-mente menores a las de entrada, ajustándolas a un ancho de banda aún mayor que el de banda base, pero lo suficientemente bajo para ser demodulado, decifrado y decodificado por el sistema de procesamiento digital del receptor.

º
1.4 Términos y definiciones comunes.
Comunicaciones Electrónicas: Transmisión (Tx), Recepción (Rx) y procesamiento de información usando circuitos o medios electrónicos.BW: El ancho de banda es el rango de frecuencias senoidales en el cual trabaja una aplicación.Banda base: lo constituye el ancho de banda de frecuencias senoidales necesario para procesar el mensaje a transmitir.Modulación: Manipulación de las características de la señal de la portadora. Estas son amplitud, frecuencia y fase.Amplitud: Se refiere a la magnitud física que tiene la señal. En telecomunicaciones está dada en voltios y amperes para señales eléctricas, o bien Voltios/metro o Am-peres/metro para señales electromagnéticas.Frecuencia: Se refiere a la rapidez con la que la amplitud varía respecto al tiempo, aplicado a señales periódicas.Fase: Cuando se transmiten señales a la misma frecuencia, comúnmente existen diferencias en los tiempos de estas señales. Dado que las señales transmitidas son periódicas, esas diferencias de tiempo se repiten y es común expresarlas a través de un ángulo, respecto a un solo ciclo.

º
2. Análisis en el tiempo y frecuencia de señales electromagnéticas.
2.1 Señales comúnmente utilizadas.
2.1.1 Señal senoidal. Señal básica en las telecomunicaciones, dado que po-see la mayor inmunidad al ruido y a los sistemas físicos, ya que solo pue-de ser amplificada, atenuada y/o desfasada.
(a)Señal senoidal.
f (t )=A sen(2π f ( t)+ϕ )
(b)Señal senoidal rectificada.
f (t )=¿ A sen (2π f ( t )+ϕ)∨¿¿

º
2.1.2 Armónicos. Señales senoidales que son múltiplo o submúltiplo de la fre-cuencia de la señal original.
2.1.3 Escalón unitario. Señal que representa el inicio de un conjunto de seña-les o de un sistema. Es un modelo matemático de un interruptor, dado que esta señal es la que activa o desactiva el resto de las señales.
f (t)=μ ( t−500 )Dónde:
μ (t−t 0 )={0 t<t 0
1t ≥t 0

º
2.1.4 Delta de dirac. Representa un impulso de corta duración. Se le utiliza para modelar señales esporádicas (spurious). O bién picos de voltaje, co-rriente o electrómagnéticos que pueden dañar los equipos.
δ ( t−t0 )={1 t=t 0
0 t ≠ t 0
f ( t )=δ (t−50 )
2.1.5 Tren de impulsos. Representa el muestreo finito de una señal analógica que será integrada al sistema digital, generalmente de banda base.
f ( t )=f (nT )=∑n=0
N
δ (t−nT )∗g(t )
Señal senoidal muestreada a con una frecuencia de muestreo F s=20Hz ..
2.2 Números Complejos.

º
2.2.1 Teorema de Euler.
De la series de Taylor tenemos las siguientes ecuaciones:
sin θ=θ1
1 !− θ3
3 !+ θ
5
5 !−…
cosθ=θ0−θ2
2 !+ θ
3
4 !−…
ex=1+ x1 !
+ x2
2 !+ x
3
3 !+…,−∞<x<∞
Recordamos que el número imaginario o está definido de la siguiente manera:
2√−1=i
Dado que i está definida dentro del SI y la ingeniería eléctrica como símbolo de corriente eléctrica, hacemos la sustitución i=j:
2√−1= j
De aquí deducimos que:j2=−¿1j3=− jj 4=¿ 1j5= jj6=−¿1j7=− jj8=1j 9= j
Como evidentemente existe un patrón, establecemos θ= j θ, es decir, hacemos nuestro ángulo complejo, que es sustituido en las series de Taylor para funciones seno y coseno:
sin jθ= jθ1
1!−− j θ3
3 !+ jθ
5
5!−− j θ7
7 !…
sin jθ= jθ1
1!+ jθ
3
3 !+ j θ
5
5 !+ jθ
7
7 !+…

º
sin jθ= j( θ1
1!+ θ
3
3 !+ θ
5
5 !+ θ
7
7 !+…)
cos jθ= j θ0− j2θ2
2 !+ j
4θ4
4 !− j6θ6
4 !+…
cos jθ=θ0+ θ2
2 !+ θ
4
4 !+ θ
6
4 !+…
Adaptando el ángulo complejo a la serie exponencial de Taylor obtenemos:
e jƟ=1+ jθ1 !
+ θ2
2!+ j θ
3
3 !+…,−∞<x<∞
Por lo que:
e iθ=cosθ+i sen θ
Repitiendo, dado que i está definida dentro del SI y la ingeniería eléctrica como símbolo de corriente eléctrica, hacemos la sustitución i=j:
e± jθ=cosθ± j senθ
A esta fórmula se le conoce como IDENTIDAD DE EULER. Dentro de sus muchas ventajas, nos permite simplificar e integrar funciones trigonométricas y exponenciales que explican los fenómenos de transmisión de radiofrecuencia, así como fenómenos eléctricos que involucran señales senoidales.
2.1.3 El fasor.
Para entender de manera sencilla el comportamiento de las señales eléctricas que viajan a través de líneas de transmisión de cable conductor o las señales electromagnéticas que viajan por el espacio vacío, se utiliza el concepto de fasor:

º
“Representación abreviada de señal senoidal compleja mediante un vector con un extremo fijo al origen y el otro extremo girando alrededor de un plano Real-Imaginario definido como diagrama de Argand o plano complejo.”
(a) Concepto general. (b)Plano complejo o diagrama de Argand.
Las características de los fasores son en gran medida idénticas a la de los vectores utilizados para representar diversos fenómenos físicos, con la diferencia en la adición del uso de cantidades complejas:
Componente real: Componente imaginaria:
Forma Rectangular: Forma Trigonométrica:
Forma Polar: Fasor de Impedancia:
Valor de ángulo de fase:
Magnitud de fasor:
Una de las ventajas de los números complejos es la facilidad para las operaciones matemáticas, utilizando únicamente leyes de exponentes para multiplicación y división.

º
Asimismo, en la adición y substracción, se suman algebraicamente las componentes reales e imaginarias respectivamente.
z1± z2=(x¿¿1±x2)+ j( y¿¿1± y2)¿¿
Recordando que:cos (θ−90 ° )=senθ
sen (θ+90 ° )=cosθ
Al incluir la parte compleja a la representación de la señal eléctrica o electromagnética a transmitir, obtenemos una representación gráfica sencilla de su comportamiento.
Amcosϕ=Amcos (ѡt+0 ° )=Am e j0 °=Am (cos0 °+ j sen0 ° )=1+ j0

º
Amcosϕ=Amcos (ѡt+45 ° )=Ame j45 °=Am (cos 45 °+ j sen 45 ° )=0.707+ j 0.707
Amcosϕ=Amcos (ѡt+120° )=Am e j120°=Am (cos 120°+ j sen120 ° )=−0.5+ j 0.866

º
Amcosϕ=Amcos (ѡt+210° )=Am e j210°=Am ( cos210 °+ j sen210 ° )=−0.866− j0.5
Amcosϕ=Amcos (ѡt+210° )=Am e j210°=Am ( cos210 °+ j sen210 ° )=−0.866− j0.5

º
Las señales eléctricas que viajan a través de las líneas de transmisión así como las señales electromagnéticas que son irradiadas a través de la antena, son las siguientes:
Líneas de transmisión.
Voltaje:
Vmcos ϕ=Vmcos (ѡt+θ )=Vme jθ=Vm ( cosθ+ j senθ )VCorriente:
ℑcosϕ=ℑcos (ѡt+θ )=ℑe jθ=ℑ (cosθ+ j senθ ) AAntenas.
Campo Eléctrico:
Emcos ϕ=Emcos (ѡt+θ )=Eme jθ=Em (cos θ+ j sen θ ) ¿¿)
Campo Magnético:
Hmcos ϕ=Hmcos (ѡt+θ )=Hm e jθ=Hm (cosθ+ j senθ )(A /m)

º
2.2 Impedancia. Tanto los elementos eléctricos como los electromagnéticos reaccionan a la fre-cuencia de la señal inyectada, produciendo un cambio en la amplitud y fase de la misma. Dado que en nuestro caso inyectamos señal senoidal, las propieda-des inductivas y capacitivas derivan e integran las señales que se les aplican, siendo los efectos más notorios la atenuación de la señal inyectada y el desfasa-miento entre corriente y voltaje de la señal transmitida y/o recibida.
2.2.3 Resistencia. Ya sea en DC o AC, la resistencia eléctrica tiene un efecto de atenuación en la señal que fluye a través de ella. La ley de ohm esta-blece que para ciertos materiales (materiales óhmicos) la relación entre el voltaje aplicado y la corriente que fluye a través de ellos es proporcional.
X R=R
2.2.4 Conductancia. Matemáticamente se define como la inversa de la resis-tencia, y es utilizada como parte de los modelos matemáticos que definen de manera más exacta diversos componentes pasivos.
2.2.5 Reactancia Inductiva. La oposición al flujo de la corriente alterna a tra-vés de un inductor aumenta si la frecuencia de la señal se incrementa, el número imaginario asignado a la reactancia inductiva nos indica que la corriente se atrasa 90° respecto al voltaje senoidal aplicado.
X L= jωL= j2 πf

º
2.2.6 Reactancia Capacitiva. La oposición al paso de la corriente alterna dis-minuye conforme la frecuencia de la señal inyectada aumenta. El número imaginario asignado a la reactancia capacitiva nos indica que la corriente se adelanta 90° respecto al voltaje aplicado.
X L=− j 1ωC
=− j 12 πfC
2.2.7 Impedancia. Así se le define a la sumatoria total de resistencia y reac-tancia inductiva y capacitiva del circuito eléctrico RL, RC o RLC. La co-rriente y el voltaje inyectados sufrirán un desfasamiento y atenuación de acuerdo a la configuración de los elementos eléctricos. De manera más general, se le define como la oposición, atenuación y desfasamiento de la corriente alterna.
Z=R± jX
Dónde:
Z = Impedancia del sistema. Aunque el fasor de impedancia es una cantidad compleja, es común encontrar en las hojas de dispositivos mencionar solamente la magnitud de la mis-ma.R = Parte resistiva de impedancia.X = Parte reactiva o imaginaria.
A partir de estas definiciones, obtenemos la siguiente tabla:
Elemento eléc-trico
Resistor
R
1kΩ
Inductor
L
1mH
CapacitorC
1µF
v(t) v (t )=i(t)RLd i(t)dt
1C∫t0
t
i (t )dt+vC( t0)
i(t)

º
i (t )= v (t )R
1L∫t0
t
v (t )dt+iL (t 0) Cd v (t )dt
ReactanciaX R=R + j2 πfL − j
12πfC
2.3 Respuesta en frecuencia.
Dado que los sistemas de telecomunicación comparten los medios físicos a través de los cuales las señales son transmitidas, es muy difícil hacer una distinción en el tiempo de las diferentes señales que viajan a través del espacio o bien los conductores. Por esta razón es necesario aplicar esquemas teóricos y prácticos para que los sistemas de telecomuni-cación puedan manipular señales de forma eficiente.
2.3.1 Las ecuaciones de Maxwell están definidas de la siguiente manera:
2.3.2 Constante de propagación.
La ecuación o constante de propagación establece lo siguiente para ciertos mate-riales:
γ=√ jѡμ(σ+ jѡε)=α+ jβ
Dónde:
γ = Constante de propagación.2πf=ѡ = frecuencia angular.μ = permitividad magnética.ε = permitividad dieléctrica.

º
3. Parámetros básicos de sistemas de radiofrecuencia.
3.1 Estado de Ocupación del Espectro en México
A efecto de contar con un panorama general que nos permita contextualizar la manera en que es utilizado el espectro radioeléctrico en México, se presenta en esta sección un estudio de ocupación de los rangos de frecuencias VHF, UHF, SHF y EHF, el cual abarca desde los 30 MHz hasta los 300 GHz.El presente estudio hace énfasis en aquellas bandas que han sido identificadas como IMT, en virtud de la relevancia que éstas tienen para la implementación y desarrollo de servicios móviles de banda ancha.
“I. Espectro de uso libre: son aquellas bandas de frecuencias que pueden ser utilizadas por el público en general sin necesidad de concesión, permiso o registro;
II. Espectro para usos determinados: son aquellas bandas de frecuencias otorgadas mediante concesión y que pueden ser utilizadas para los servicios que autorice la Secretaría en el título correspondiente;
III. Espectro para uso oficial: Son aquellas bandas de frecuencia destinadas para el uso exclusivo de la administración pública federal, gobiernos estatales y municipales, organismos autónomos constitucionales y concesionarios de servicios públicos, en éste último caso, cuando sean necesarias para la operación y seguridad del servicio de que se trate, otorgadas mediante asignación directa.
IV. Espectro para usos experimentales: son aquellas bandas de frecuencias que podrá otorgar la Secretaría, mediante concesión directa e intransferible, para comprobar la viabilidad técnica y económica de tecnologías en desarrollo tanto en el país como en el extranjero, para fines científicos o para pruebas temporales de equipo.
V. Espectro reservado: son aquellas bandas de frecuencias no asignadas ni concesionadas por la Secretaría.”
3.2 Rango VHF (30-300MHz)
Rango de frecuencias VHF (Very High Frequency), también conocido como banda de ondas métricas.Las atribuciones que encontramos en este rango de frecuencias son diversas, aunque por lo reducido del mismo (270 MHz), no podrá compararse con la diversidad de atribuciones que encontraremos en rangos más altos.

º
Atribuciones encontradas en VHFCOMPONENTE SERVICIOS DE
RADIOCOMUNICACIÓN52
Terrenal FIJO, MÓVIL, MÓVIL MARÍTIMO, MÓVILAERONÁUTICO EN RUTA (R), RADIODIFUSIÓN yAFICIONADOSFijo, Móvil, Móvil salvo móvil aeronáutico yAficionados
Satelital MÓVIL POR SATÉLITE y AFICIONADOS POR SATÉLITEMóvil por satélite
Otros RADIOASTRONOMÍA, RADIONAVEGACIÓNAERONÁUTICA, METEOROLOGÍA POR SATÉLITE,INVESTIGACIÓN ESPACIAL, RADIOLOCALIZACIÓN,RADIONAVEGACIÓN POR SATÉLITE y OPERACIONESESPACIALESRadioastronomía, Radiolocalización y Operacionesespaciales
3.3 Resumen de ocupación en VHF
º
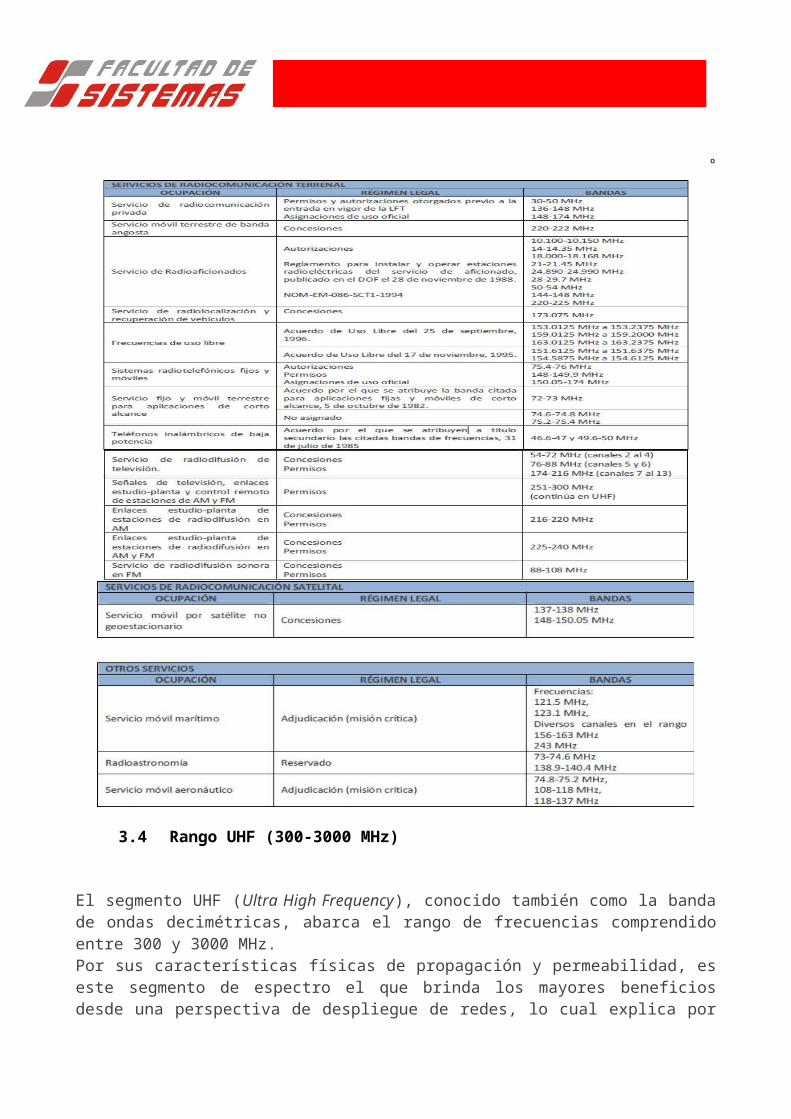
3.4 Rango UHF (300-3000 MHz)
El segmento UHF (Ultra High Frequency), conocido también como la banda de ondas decimétricas, abarca el rango de frecuencias comprendido entre 300 y 3000 MHz.Por sus características físicas de propagación y permeabilidad, es este segmento de espectro el que brinda los mayores beneficios desde una perspectiva de despliegue de redes, lo cual explica por qué la mayoría de los servicios comerciales de radiocomunicación en la actualidad se concentren en este segmento de espectro. Esto enfatiza la necesidad de una adecuada planeación y optima administración del espectro en esta banda.
Atribuciones encontradas en UHF
COMPONENTE SERVICIOS DE RADIOCOMUNICACIÓN52
Terrenal FIJO, MÓVIL, MÓVIL salvo móvil aeronáutico, MÓVILAERONÁUTICO (R), RADIODIFUSIÓN,RADIOLOCALIZACIÓN, RADIONAVEGACIÓN.Aficionados, Fijo, Móvil, Móvil salvo móvilAeronáutico, Radiolocalización.
Satelital MÓVIL POR SATÉLITEMóvil por satélite, Móvil por satélite salvo móvilaeronáutico por satélite (Tierra-espacio)
Otros AYUDAS A LA METEOROLOGÍA, EXPLORACIÓN DE LATIERRA POR SATÉLITE, INVESTIGACIÓN ESPACIAL,FRECUENCIAS PATRÓN Y SEÑALES HORARIAS PORSATÉLITE, METEOROLOGÍA POR SATÉLITE,OPERACIONES ESPACIALES, RADIOASTRONOMÍA,RADIO DETERMINACIÓN POR SATÉLITE,RADIONAVEGACIÓN AERONÁUTICA,RADIONAVEGACIÓN POR SATÉLITE.Operaciones espaciales, Exploración de la
Bandas no identificadas como IMT en UHF

º
Resumen de ocupación en UHF
3.5 Bandas identificadas como IMT en UHF

º
a. Banda 450-470 MHzAtribución
Banda Atribución CNAF Instrumentos Bilaterales
450-470 MHz FIJOMÓVIL
Arreglo administrativo con los EUA, existe unacuerdo para el uso de las frecuencias 463.45MHz, 463.475 MHz, 468.45 MHz y 468.475 MHzpara propósitos especiales.
Uso y ocupación actualActualmente esta banda es intensamente utilizada a nivel nacional para la provisión de servicios de radiocomunicación privada de entidades gubernamentales, empresas paraestatales y empresas privadas mediante la instalación de estaciones base, repetidores, equipos móviles y portátiles.Actualmente se tienen registrados más de 9000 sistemas de radiocomunicación privadaLa gran concentración de sistemas de radiocomunicación privada en el segmento 450-470 MHz, queda claramente ilustrada en la siguiente gráfica, en la que se muestra la ocupación de la banda en donde han sido otorgados permisos y autorizaciones para estos sistemas, misma que va de los 400 a los 520 MHz.
b. Banda 698-960 MHzAtribución
3.6 Infraestructura de Estaciones de Televisión

º
3.6.1 Infraestructura de Estaciones de FM
3.6.2 Infraestructura de Estaciones de AM
En el caso de la Televisión, al igual que en los radios, a cada canal le corresponde una determinada frecuencia, estas frecuencias cubren los canales desde el 2 hasta el 13 en VHF.
A su vez, para el caso de televisión la banda VHF se encuentra dividida en tres sub-bandas: sub-banda I que corresponde a los canales del 2 al 4; sub-banda II que incluye a los canales 5 y 6; y sub-banda III que incluye los canales del 7 al 13 (esta sub-banda tambien es conocida como Banda Alta de Televisión).
3.7 Frecuencia de Canales de Television en VHF para México
Sistema M 525 líneas
Sistema N 625 líneas
Canal
Video
(MHz)
Audio
(MHz)
255.25
59.75
361.25
65.75
467.25
71.75
577.25
81.75
683.25
87.75
7175.25
179.75

º
8181.25
185.75
9187.25
191.75
10193.25
197.75
11 19 20
9.25
3.75
12205.25
209.75
13211.25
215.75
3.7.1 Frecuencia de Canales de Television en UHF para México
Sistema M 525
líneasSistem
a N 625
líneas
Canal
Video (
MHz)
Au
dio (
MHz)
14
47
1.25
47
5.75
15
47
7.25
48
1.75
16
48
3.25
48
7.75
17
48
9.25
49
3.75
1 4 4
8
95.25
99.75
19
50
1.25
50
5.75
20
50
7.25
51
1.75
21
51
3.60
51
7.75
22
51
9.25
52
3.75
23
52
5.25
52
9.75
24
53
1.25
53
5.75
25
53
54
7.25
1.75
26
54
3.25
54
7.75
27
54
9.25
55
3.75
28
55
5.25
55
9.75
29
56
1.25
56
5.75
30
56
7.25
57
1.75
31
57
3.25
57
7.75
32
57
9.
58
3.

º
25
75
33
58
5.25
58
9.75
34
59
1.25
59
5.75
35
59
7.25
60
1.75
36
60
3.25
60
7.75
37
60
9.25
61
3.75
38
61
5.25
61
9.75
39
62
1.25
62
5.75
40
62
7.25
63
1.75
41
63
3.25
63
7.75
42
63
9.25
64
3.75
4 6 6
3
45.25
49.75
44
65
1.25
65
5.75
45
65
7.25
66
1.75
46
66
3.25
66
7.75
47
66
9.25
67
3.75
48
67
5.25
67
9.75
49
68
1.25
68
5.75
50
68
7.25
69
1.75
51
69
3.25
69
7.75
52
69
9.25
70
3.75
53
70
5.2
70
9.7
5 5
54
71
1.25
71
5.75
55
71
7.25
72
1.75
56
72
3.25
72
7.75
57
72
9.25
73
3.75
58
73
5.25
73
9.75
59
74
1.25
74
5.75
60
74
7.25
75
1.75
61
75
3.25
75
7.75
62
75
9.25
76
3.75
63
76
5.25
76
9.75
64
77
77
º
1.25
5.75
65
77
7.25
78
1.75
66
78
3.25
78
7.75
67
78
9.25
79
3.75
68
79
5.25
79
9.75
69
80
1.25
80
5.75
70
80
7.25
81
1.75
71
81
3.25
81
7.75
72
81
9.25
82
3.75
73
82
5.25
82
9.75
74
83
1.25
83
5.75
75
83
7.25
84
1.75
76
84
3.25
84
7.75
77
84
9.2
85
3.7
5 5
78
85
5.25
85
9.75
79
86
1.25
86
5.75
80
86
7.25
87
1.75
81
87
3.25
87
7.75
82
87
9.25
88
3.75
83
88
5.25
88
9.75
4. Modulaciones y demodulaciones analógicas.

º
Objetivo.
Mostrar, mediante el uso de la transformada de Fourier continua, y la aplicación de la Transformada rápida de Fourier, los diferentes espectros de señales de la señal de AM DSBFC, así como los diferentes parámetros a medir de la señal.
Como recordamos, la señal de AM está dada por la siguiente ecuación.
S ( t )=Ac∗[1+Ka∗m (t ) ]∗cos (2π∗fc∗t)
Donde:
Ac = Amplitud de la portadoraK = Sensibilidad de la amplitud moduladora.
m(t) = Señal senoidal moduladora. = cos (2 π∗fc∗t)fc = frecuencia de la señal portadora.fm = frecuencia de la señal moduladora.
Y su porcentaje de modulación esta expresado por:
m=VmVpM%=Vm
Vp.100
Donde:
m = K o Sensibilidad de la amplitud moduladora. M = porcentaje de modulación.Vm = voltaje pico de señal moduladora.Vp = voltaje pico de señal portadora.
A su vez observamos que dependiendo de la amplitud de la señal moduladora, el mensaje puede ser más o menos difícil de demodular, de acuerdo al porcentaje de modulación:
Porcentaje de modulación > 100%

º
Porcentaje de modulación < 100%

º
Porcentaje de modulación = 100%
A continuación se anexa el programa en labview para obtener las señales anteriores:

º
Obtener el espectro de frecuencia de la señal modulada en AM.
S (t )=Ac∗[1+Ka∗m (t ) ]∗cos (2π∗fc∗t)Donde:
Ac = Amplitud de la portadoraK = Sensibilidad de la amplitud moduladora.m(t) = Señal senoidal moduladora. = cos (2 π∗fm∗t )fc = frecuencia de la señal portadora.
fm = frecuencia de la señal moduladora.
Así que nos queda de la forma:
S(t) = Ac * [1 + Ka * cos 2 * π * fm * t ] * cos(2 * π * fc * t)S(t) = Ac * cos (2 * π * fc * t ) + Ka * cos (2 * π * fm * t) * cos (2 * π * fc * t )
Asi como: ωm=2∗π∗fm ωc=2∗π∗fc
S(t) = Ac * cos ( ωc * t ) + Ka * cos ( ωm * t) * cos (2 ωc * t )
Aplico identidad trigonométrica: cosA∗cosB=12[cos ( A−B )+cos ( A+B )]
S(t) = Ac * cos ( ωc * t ) + (1/2) Ka Ac[ cos ( (ωm – ωc)t ) + cos ((ωm + ωc)t ) ]
F{ S(t) } = Ac * F{ cos ( ωc * t ) } + (1/2) Ka Ac F{ cos ( (ωm – ωc)t ) } + (1/2) Ka Ac F{ cos ( (ωm + ωc)t ) }
∞ ∞ ∞ F{ S(t) } = Ac ∫-∞ cos ( ωc * t ) e-jωt dt + (1/2) Ka Ac { ∫-∞ cos (ωm-ωc) e-jωt dt + ∫-∞ cos (ωm+ωc) e-jωt dt }

º
F{ ω } = (Ac *π) δ [ cos (ω - ωc) + cos (ω + ωc)]
+ (1/2) Ka Ac δ [ cos ( ω –( ωm - ωc) ) + cos (ω +( ωm - ωc)) ] + (1/2) Ka Ac δ [ cos ( ω –( ωm + ωc) ) + cos (ω +( ωm + ωc)) ]
Ahora bien, descrito gráficamente, se ve de la siguiente manera:
Aquí podemos ver como las señales senoidales son sólo una componente con un tiempo infinitesimalmente corto al verlos en el espectro de frecuencia, de ahí la necesidad de expresar la función en forma de la delta de dirac δ(t). También observamos que en AM tenemos la frecuencia de la portadora como componente central (ωc), así como las componentes producto de la frecuencia moduladora (ωm), considerando que el porcentaje de modulación es del 100%, la máxima amplitud de las bandas laterales(ω+(ωm+ωc)), será del 50% para cada una.
Obtenga el espectro de frecuencia de la siguiente señal AM:
Fc = 10 cos (2 π 200 t) = 400 π tFm = 5 cos (2 π 10 t) = 20 π t
S (t )=Ac∗[1+Ka∗m (t ) ]∗cos (2π∗fc∗t)Donde:
Ac = 10 VKa = 1/5m(t) = 5 cos(2 π 10 t)fc = 10Hz
fm = 200Hz
Así que nos queda de la forma:
S(t)= Ac * [1 + Ka * m(t) ] * cos(2 * π * fc * t) S(t)= 10 * [1 + 1/5 * 5 cos(2 π 10 t )] * cos(2 π 200 t) S(t) = Ac * cos ( ωc * t ) + (1/2) Ka Ac Am[ cos ( (ωm – ωc)t ) + cos ((ωm + ωc)t ) ]
S(t) = Ac * cos (2 π 200 t ) + (1/2) 10 (1/5)(5)[ cos ( (2 π 10 t – 2 π 200 )t ) + cos ((2 π 10 t + 2 π 200)t ) ]
Siguiendo el desarrollo anterior, nos queda una fórmula general a la cual le sustituimos valores de la siguiente forma:
F{ ω } = 10 π δ[ (ω- ωc) +(ω+ ωc) ] + 5 π δ [ cos (ω –( ωm - ωc) ) + cos (ω +( ωm - ωc))]+ 5 π δ [ cos (ω –( ωm + ωc) ) + cos (ω +( ωm + ωc))]
Sustituyendo valores nos queda:
F{ ω } = 10 π δ[ (ω- 400 π) +(ω+400 π) ] + 5 π δ [ cos (ω –( 20π - 400π) ) + cos (ω +( 20π - 400π))]+ 5 π δ [ cos (ω –( 20π + 400π) ) + cos (ω +( 20π + 400π))]
El espectro de frecuencia es el siguiente:

º
De forma práctica las señales de AM vistas en un osciloscopio Tektronix TDS2012 son las siguientes.
Vm= 5cos2π1000Vc= 0.1cos2π20000
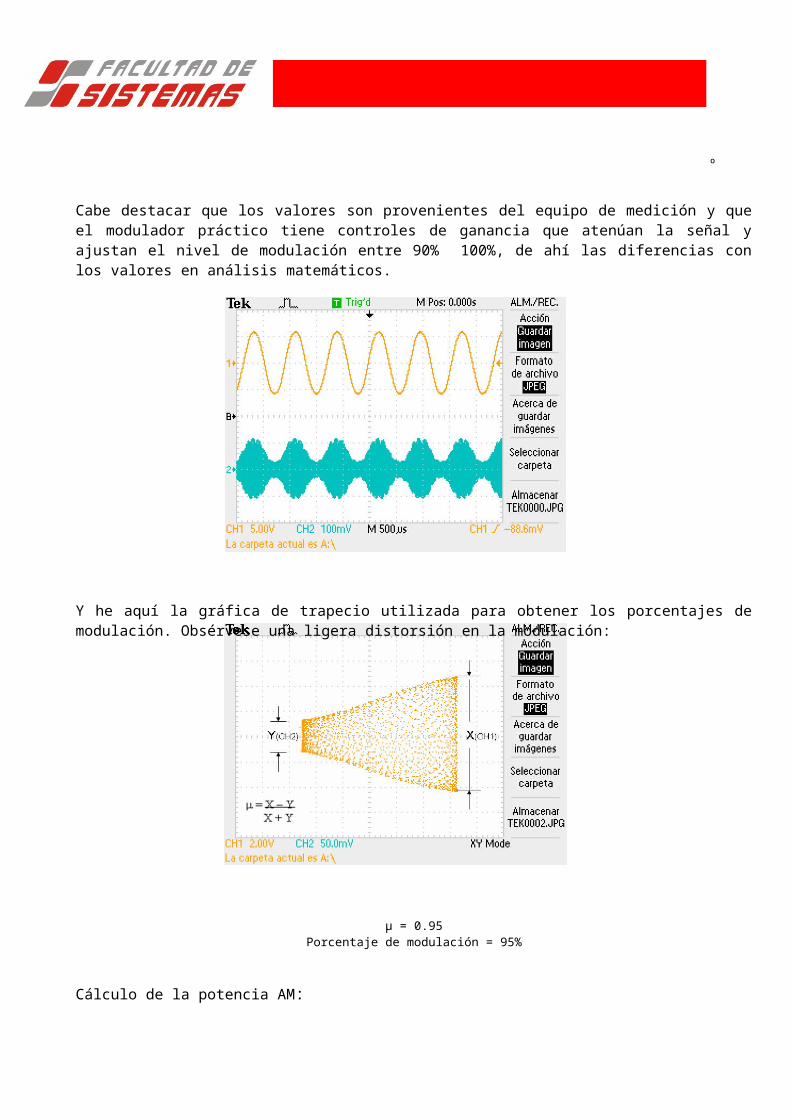
Cabe destacar que los valores son provenientes del equipo de medición y que el modulador práctico tiene controles de ganancia que atenúan la señal y ajustan el nivel de modulación entre 90% 100%, de ahí las diferencias con los valores en análisis matemáticos.
Y he aquí la gráfica de trapecio utilizada para obtener los porcentajes de modulación. Obsérvese una ligera distorsión en la modulación:

º
μ = 0.95 Porcentaje de modulación = 95%
Cálculo de la potencia AM:Portadora=10 sen (2π 1000 t )Mod=10 sen (2π 200 t )
Primer caso: μ=1
Pc= (1/2)Vc2 = 102/2 = 50W %en el ejercicio viene que 100w, pero sería con una amplitud de portadora de 20V
Pbli = Pbls = (1/8) μ2 Vc2 = 102/8 =100/8 = 12.5WSegundo caso: μ=0.5
Pc= (1/2)Vc2 = 102/2 = 50W %en el ejercicio viene que 100w, pero sería con una amplitud de portadora de 20V
Pbli = Pbls = (1/8) Vc2 =(0.52)102/8 = 0.25(100)/8 = 3.125W
Segundo caso: μ=0.2
Pc= (1/2)Vc2 = 102/2 = 50W %en el ejercicio viene que 100w, pero sería con una amplitud de portadora de 20V
Pbli = Pbls = (1/8) Vc2 = (0.22) 102/8 = 0.04(100/8) = 0.5 W %cercano al 1% que se menciona en los libros y apuntes del curso
CONCLUSIONES
En esta ocasión, se hicieron diversos análisis matemáticos de la señal de AM, específicamente del tipo DSBFC, que dada la relativa simplicidad de los resultados obtenidos en sus análisis de tiempo, de frecuencia, simulado mediante MATLAB, y medido en osciloscopio, nos dan como conclusión que el diseño de circuitos que generen o transmitan y a su vez reciban este tipo de señal, serán de una complejidad mediana o baja, sacrificando a su vez la eficiencia en el consumo de energía. El concepto que se debe recordar para poder entender el análisis de frecuencia es el de la delta de dirác, ya que al haber analizado solamente 2 componentes senoidales, resulta sencillo graficar en el tiempo, así como transformar las funciones en F{ω},o pero no tan sencillo de entender o graficar en el dominio de la frecuencia.
5. Modulaciones y demodulaciones digitales.
Objetivo
Analizar matemáticamente la modulación angular (PM y FM) por medio del análisis en el tiempo, en el dominio de la frecuencia, para así entender sus parámetros más importantes, para así estar preparados para entrar a las técnicas de modulación modernas.

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora vs señal portadora
º
Así como podemos modificar la amplitud de la portadora para transmitir y recibir información, así también podemos modificar la frecuencia y el ángulo de fase de la misma para cumplir el mismo propósito. La modulación angular puede ser ya sea PM o modulación por fase, o bien FM o modulación de frecuencia.
De forma general una señal modulada en ángulo está expresada de la siguiente forma:
s ( t )=Ac cos [θi (t )]
Donde:
i(t) = función de fase y frecuencia de portadora.Ac = Amplitud de portadora.
La PM o modulación por fase consiste en variar el ángulo (t) se varía linealmente con la señal del mensaje m(t). Está expresada en la siguiente ecuación:
s ( t )=Ac cos [2 π∗fc∗t+kp∗m ( t )]
Ac = Amplitud de la portadoraAm = Amplitud de la moduladoram(t) = Señal senoidal moduladora = Am∗cos(2π∗fm∗t)fc = frecuencia de la señal portadora.i(t) = 2 pfct+kp∗m(t) = función de fase. kp = sensibilidad de fase del modulador rad/volt
A continuación podemos observar una señal senoidal modulada en fase, variando el coeficiente de sensibilidad.

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora vs señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora vs señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora vs señal portadora
º
6. Figura 1. Modulación por fase, con Kp = 1 Hz/v
7. Figura 2. Modulación por fase, con Kp = 5Hz/V

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal portadora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
0
1
tiempo
volta
je
señal moduladora vs señal portadora
º
Figura 3. Modulación por fase, con Kp = 8Hz/V
Como hemos observado la salida modulada en fase es altamente sensible a la constante Kp, no hace falta aumentarla mucho para distorsionar la señal. Cabe señalar que la modulación PM es de corte un tanto teórico, ya que es simple de entender, pero su aplicación práctica en un circuito electrónico es compleja debido a que las dos señales deben tener una diferencia de fase de 0°. Entonces, se implementa la modulación en frecuencia o FM que modifica la frecuencia de la señal portadora de acuerdo a la frecuencia instantánea de la señal con el mensaje, independiente del ángulo de fase que tenga el mensaje en ese momento.
Frecuencia instantánea:
fi (t )=12π (d θi (t )
dt )=fc+kf m(t )
m ( t )=Am∗cos (2π∗fm∗t )
fi(t) = (1/2π) (d i(t) / dt) = fc + kf * Am * cos (2 * π * fm * t)
Δf = kf Am = Máxima desviación de frecuencia proporcional a la amplitud de la señal moduladora e independiente de la frecuencia de modulación.
Entonces integramos esa frecuencia instantánea para obtener la función en un ciclo:
i(t) = 2π ∫fc dt + Δf 2π ∫ cos (2 * π * fm * t) dt
i(t) = 2πfct + 2π Δf / 2π fm sen (2 * π * fm * t)
i(t) = 2πfct + Δf / fm sen (2 * π * fm * t)
β=∆ ffm
= índice de modulación
i(t) = 2πfct + sen (2 * π * fm * t) = 2πfct + (kf Am / fm )sen (2 * π * fm * t)
Así, la modulación en frecuencia está dada por la siguiente ecuación:

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal moduladora
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal portadora
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal FM vs señal moduladora
Frec. 5Hz
Frec. instantanea 5Hz
50 Hz
50Hz
5Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal moduladora
Frec. 5Hz
Frec. instantanea 5Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal portadora
50 Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal FM vs señal moduladora
50Hz
5Hz
º
S ( t )=Ac∗cos[2π fc t+(kf Amfm )sen (2 π fm t )]
Donde:
Ac = Amplitud de la portadoraAm = Amplitud de la moduladoram(t) = Señal senoidal moduladora = Am * cos( 2 * π * fm * t )fc = frecuencia de la señal portadora.fm = frecuencia de la señal portadora.kp = sensibilidad de fase del modulador rad / voltkf = sensibilidad de fase del modulador Hz / voltΔf = kf Am = Máxima desviación de frecuencia proporcional a la amplitud de la señal moduladora e independiente de la frecuencia de modulación.
β=∆ ffm
= índice de modulación
A continuación se muestra un ejemplo de modulación FM, variando el índice de modulación :
Figura 4. Modulación por frecuencia, con

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal moduladora
Frec. 5Hz
Frec. instantanea 5Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal portadora
50 Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal FM vs señal moduladora
50Hz
5Hz
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal moduladora
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal portadora
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-1
-0.5
0
0.5
1
tiempo
volta
je
señal FM vs señal moduladora
Frec. 5Hz
Frec. instantanea 5Hz
50 Hz
50Hz
5Hz
º
Figura 5. Modulación por frecuencia, con
Figura 6. Modulación por frecuencia, con
Ejemplo.Obtener la desviación de frecuencia y el índice de modulación para una onda
moduladorasenoidal con amplitud igual a 5 v y frecuencia de 1Khz aplicada a un modulador de frecuencia, si la sensibilidad del modulador es 40 Hz/volt y la frecuencia portadora es de 100Khz.

º
m(t) = Am * cos (2 * π * fm * t) = 5 cos( 2π 100 kHz t )kf = 40Hz/VΔf = kf Am = 40Hz/V*5V = 200Hz200 / 1k = 0.2
El índice de modulación es una referencia para determinar que tanto ancho de banda utiliza la señal moduladora.
Sientonces tenemos FM de banda angosta
Ya que las ecuaciones resultantes tienen un espectro de frecuencia muy similar a la señal AM DSBFC:
S ( t ) AM−DSBFC=Ac cos (2π fc t )+(Ac Ka Am2
)¿
Demostremos:
S ( t )FM=Ac∗cos [2π fc t+(Kf Amfm )sen (2π fm t )]
Si
cos [sen( 2 π fm t ) ] = 1 ya que cos 0 = 1sen [sen( 2 π fm t ) ] = sen(2pfmt) ya que sen 2 π t varia de 0 a 1 multiplicado por
Entonces usamos identidades:
cos (A+B )=cosA cosB−sen A sen B
senA senB=12[cos ( A−B )−cos ( A+B )]
cos 2πfct cos [ (kf Am / fm )sen (2 * π * fm * t) ] – sen 2πfct sen [ (kf Am / fm )sen (2 * π * fm * t) ]
= cos 2πfct – (½) [ cos (2πfct - (kf Am / fm )sen (2 * π * fm * t)) – cos (2πfct + (kf Am / fm )sen (2 * π * fm * t)) ]
= cos 2πfct + (½) [ cos (2πfct + (kf Am / fm )sen (2 * π * fm * t)) – cos (2πfct - (kf Am / fm )sen (2 * π * fm * t))]
Sientonces tenemos FM de banda ancha
S ( t )FM=Ac∗cos [2π fc t+(Kf Amfm )sen (2π fm t )]
Aplicamos identidades:
cos (A+B )=cosA cosB−sen A sen B
cos 2πfct cos [ (kf Am / fm )sen (2 * π * fm * t) ] – sen 2πfct sen [ (kf Am / fm )sen (2 * π * fm * t) ]
=Ac [cos 2πfct cos [ (kf Am / fm )sen (2 * π * fm * t) ] – sen 2πfct sen [ (kf Am / fm )sen (2 * π * fm * t) ] ]

º
SI ( t ) = Ac cos [ (kf Am / fm )sen (2 * π * fm * t) ]
SQ ( t ) = Ac sen [ (kf Am / fm )sen (2 * π * fm * t) ]
Entonces recordando que Ae± jθ=A [cosθ± jsenθ ]
S ( t )=Ac e jβsen(2 π fm t )=Ac ¿
Dado que S(t) es una función periódica, podemos expresarla en la forma de la serie compleja de Fourier:
S ( t )= ∑n=−∞
∞
Cn ejωnt
¿ ∑n=−∞
∞
Cn ej (2 π fm )nt
Cn=1T
∫−T /2
T /2
f (t)e− jωnt
Cn=1Tm
∫−Tm/2
Tm/2
s(t )e− j2π fmt dt
Cn=AcTm
∫−Tm/2
Tm/2
e jβ sen(2π fmt )e− j2π fm tdt
Cn=Ac fm ∫−fm/2
fm/2
e jβsen(2 π fm t )e− j2π fmt dt
S ( t )=∑❑
∞
Cnejωnt=¿ ∑
n=−∞
∞
Cn¿
Entonces:
Cn=Ac fm ∫−fm/2
fm/2
e jβsen(2 π fm t )e− jn2 π fm tdt
Cn=Ac fm ∫−fm/2
fm/2
e j (βsen( 2π fmt ) )− jn2 πfmtdt
hacemos x = 2π fm t dx = 2π fm dt fm = 1/(2π) Ac=1

º
Cn=
Ac2π
∫– π
π
e j( βsen(2 π fm t )−n2πfmt ) 2πfmdt
Cn=1
2π∫−π
π
e j (βsenx−nx)dx
Cn=1
2π∫−π
π
e j (βsenx /−nx )dx=Jn(β )
O bién:Cn=AcJ n(β)
A esta ecuación se le conoce comofunción de Bessel
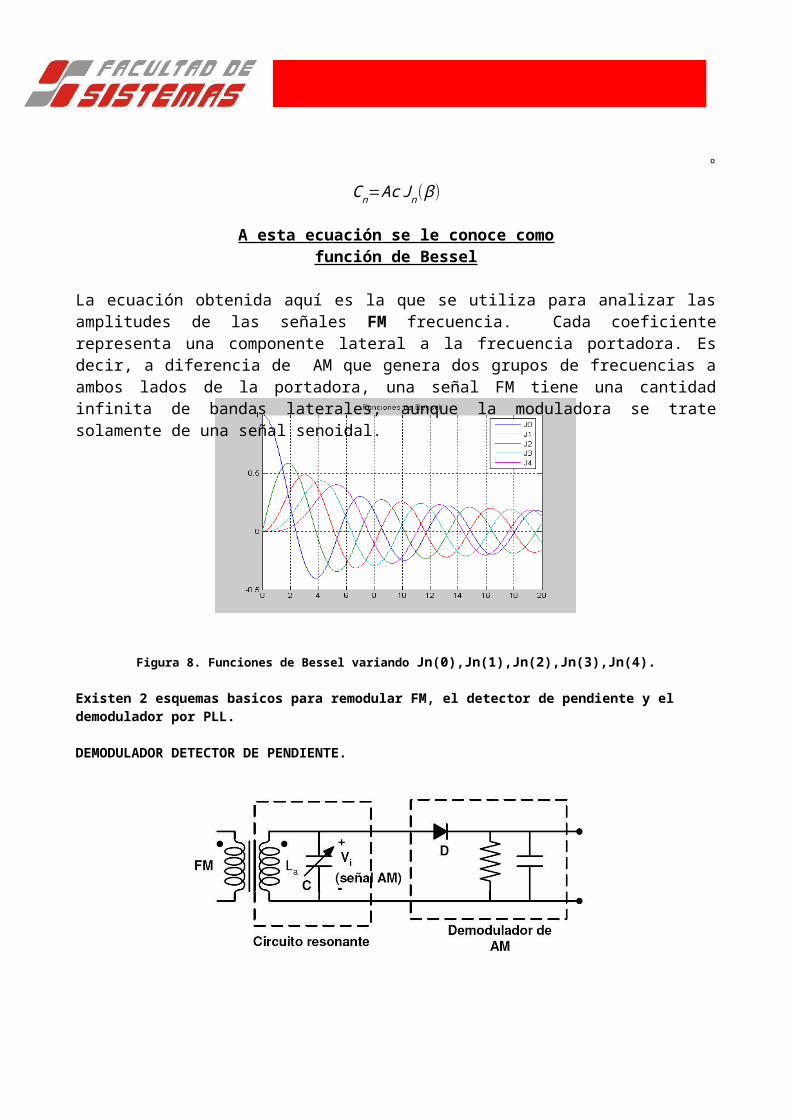
La ecuación obtenida aquí es la que se utiliza para analizar las amplitudes de las señales FM frecuencia. Cada coeficiente representa una componente lateral a la frecuencia portadora. Es decir, a diferencia de AM que genera dos grupos de frecuencias a ambos lados de la portadora, una señal FM tiene una cantidad infinita de bandas laterales, aunque la moduladora se trate solamente de una señal senoidal.
Figura 8. Funciones de Bessel variando Jn(0),Jn(1),Jn(2),Jn(3),Jn(4).
Existen 2 esquemas basicos para remodular FM, el detector de pendiente y el demodulador por PLL.
DEMODULADOR DETECTOR DE PENDIENTE.

º
Figura 9. Detector de pendiente.
Este esquema implementa un filtro pasabanda sintonizado a la frecuencia de la portadora en el centro y como ancho de banda la desviación de frecuencia o Δf antes mencionada, lo que hará que ese valor FM ¡también varíe en amplitud tal como en AM! Para posteriormente ser pasado por un detector de envolvente y un filtro pasabanda.Como también varía en amplitud, ahora la ecuación de señal de FM a la salida del filtro LC (v1) tiene que expresar esta envolvente, que se le conoce como envolvente compleja.
S ( t )=Ac∗cos [2 π fc t+(kf Amfm )sen (2π fm t )]
V ( t )=Ac∗[ωc t+Bsenωmt ]
Expresamos la señal de FM en términos complejos.
S ( t )=Ac∗cos [2 π fc t+(kf Amfm )sen (2π fm t )]
V ( t )=Ac∗[ωc t+Bsenωmt ]
V ( t )=Ac∗cos [ωc t+θ ( t )]
V ( t )=Ac e± jωct
Ahora le agregamos la señal producto del filtro pasabandas.
V (t )=Ac∗g (t )∗e± jωct
Siendo g(t) la modulación en amplitud producto del filtro:
V(t) = Ac * g(t) cos ωc t + j g(t) sen ωc t
Teniendo que:
V(t) = Ac * x(t) + j y(t)
Siendo:
x ( t ) = parte real de señal demodulada
y ( t ) = parte imaginaria de señal demodulada
Como podemos observar, la implementación de este esquema es bastante simple utilizando simulink

º
Figura 10. Detector de pendiente.
A continuación vemos las señales involucradas en el proceso, resultado del diagrama hecho en simulink.
Señal portadora
Señal modulada en frecuencia
Señal a la salida del filtro LC detector de pendiente.
º
Figura 11. Señales del detector de pendiente.
S ( t )=Ac∗cos [2 πfct+(kf Amfm ) sen (2πfmt )]
Cn=Ac2π
∫−π
π
e j (βsen ( 2π fmt )−n2π fm t)2π fm t dt
La señal FM para un solo tono está representada en la siguiente ecuación, considerando que es un solo tono y una señal impar:
Si obtenemos su representación en serie compleja de Fourier nos que da de la siguiente forma:
Lo que nos da a entender que se compone de una cantidad infinita de frecuencias laterales, cuyas amplitudes están determinadas por la ecuación de Bessel.La potencia promedio de la portadora es:
Ps=Ac
2
2∑−∞
∞
J n2 (β )=
Ac2
2
Dado que para simplificar el uso de FM, esta debe ser de banda angosta, y en ese caso, J0()=0 y J1()=1, y a partir de ahí Jn()=0.
Existen dos formas para determinar el ancho de banda necesario para transmitir una señal, la regla de Carlson y las tablas de coeficientes de Bessel.
Regla de Carlson.
Es una fórmula empírica empleada para determinar el ancho de banda necesario para transmitir FM de banda angosta.
BT ≈ 2Δf [ 1 + (1/β) ] = 2(Δf + fm)
Ya que para que se cumpla la regla |Jn(β) | > 0.01
Ejemplo.
Si el valor máximo de Δf es de 75KHz y la frecuencia de modulación es de 15KHz, cual es la razón de desviación.
Δf / fm = índice de modulación = 75KHz / 15KHz = 5
Entonces: BT = 2* 75KHz * [1+ (1/5) ] = 150KHz * 1.2 = 180KHz

º
Usando tablas, como = 5: J0 J1 J2 J3 J4 J5 J6 J7 J8
Sabemos que tenemos 8 pares de bandas laterales asi que son:
15KHz por cada múltiplo de la señal moduladora x 8, que son los grados de la ecuación de Bessel a la que llega el indice de modulacion 5 x 2bandas por cada Jn = 240KHz
Modulación Indirecta.
Uno de los problemas prácticos al diseñar sistemas de comunicación radica en la inestabilidad de los circuitos osciladores de alta frecuencia, es decir que debido a factores como temperatura, campos eléctricos o campos magnéticos, tienden a variar en su amplitud y frecuencia, haciendo que su espectro de frecuencia se recorra sin control. Para evitar este problema en la modulación en frecuencia, se utiliza la modulación indirecta, que consiste en hacer la modulación en frecuencias bajas, y luego inyectar esta señal resultante en un multiplicador de frecuencia, es decir, un circuito electrónico que aumentará de forma lineal todas las frecuencias moduladoras y portadora, sin afectar el índice de modulación ni la desviación de frecuencia. En caso de producirse un corrimiento de frecuencia a la salida de este oscilador, en el receptor sólo habrá que hacer cambios en el filtro de salida es decir, un ligero ajuste en el circuito sintonizador.
Figura 12. Diagrama de bloques del modulador FM indirecto.
Discriminador de frecuencia.
Es un circuito que combina dos filtro LC pasa banda, uno para cada frecuencia de corte, ademas de 2 detectores de envolvente y filtros pasabaja, para recuperar la señal del mensaje con un mínimo de pérdidas y distorsión de la señal, además que la señal es recuperada con un nivel de voltaje sin componente de directa, pudiendo ser fácilmente adaptada a una red amplificadora. Además es una solución muy económica para demodular FM.

º
CONCLUSIONES
El estudio de la modulación en fase presenta un nuevo grado de complejidad, dado que tanto su modulación como demodulación requiere circuitería de mayor dificultad de implementar. Además, las herramientas matemáticas requeridas para el correcto entendimiento de esta técnica de modulación involucran muchos temas avanzados de cálculo, circuitos eléctricos y análisis de señal. Para poder hacer este tema más comprensible, ha sido necesario implementar algoritmos desarrollados en MATLAB y Simulink para analizar el comportamiento de las ecuaciones al variar sus parámetros, acelerando el aprendizaje. Esta materia da la pauta para adaptarnos a ritmo de trabajo de los estudios de posgrado.
6. Pruebas de transmisores, receptores y conectores.
6.1 Transmisión FM
Objetivo. Utilizar los conocimientos obtenidos durante el curso para realizar la transmisión FM del SDR USRP N210 al GNU radio.
A continuación se muestra el programa en labview a utilizar en el USRP N210 para la transmisión FM:

º
También se muestra el programa que se utilizó para la recepción FM en el GNU radio:

º
6.2 Recepción FM
Objetivo. Utilizar los conocimientos obtenidos durante el curso para realizar la recepción FM, o bien la
transmisión del GNU radio al USRP N210.

º
En las imágenes anteriores se muestran el diagrama de bloques y panel principal del programa realizado para la recepción FM del USRP N210.
Además a continuación también se anexa el programa utilizado para la transmisión FM desde el GNU radio.

º
Conclusiones
Al realizar esta práctica nos dimos cuenta que es más fácil programar el USRP N210 que el GNU radio, ya que, además de estar más familiarizados con el labview, este programa tiene más sopor-te. El software del GNU radio es más complicado ya que se maneja en Linux y no se encuentran tutoriales, es decir casi no hay soporte de este programa, lo que nos lleva a batallar más con la programación ya que el fabricante dio por hecho que ya todos sabían programar este equipo.
7. Resumen Sistemas de Comunicaciones Electrónicas Tomasi

º
CAPITULO 1.
1. Introducción a las comunicaciones electrónicas
Se le llama comunicación electrónica a la transmisión, recepción y procesamiento de información utilizando circuitos electrónicos, en donde la información es el conocimiento, la sabiduría o la realidad en forma analógica (continua) o digital (discreta).Además toda la información debe de convertirse a energía electromagnética antes de que pueda propagarse por un sistema de comunicaciones.
1.1 Diagrama de bloques de un sistema de comunicaciones
El transmisor convierte la información de la fuente a una forma más adecuada para su transmisión, el medio de transmisión proporciona un medio de conexión entre el transmisor y el receptor, y el receptor convierte la información recibida a su forma original y la transfiere a su destino.
La diferencia entre el primer diagrama de bloques y el segundo es que uno solo puede transmitir en una sola dirección y el segundo en ambas direcciones.
1.2 Modulación y Demodulación
Modular significa cambiar, variar o regular, entonces la información de la fuente de frecuencia relativamente baja es la señal de modulación, mientras que la señal de

º
información de la frecuencia relativamente alta, sobre la cual se actúa (modulada) será la portadora. Por lo tanto a la señal resultante se le llamará onda modulada.En los sistemas de comunicaciones analógicas, la modulación es el proceso que va a variar alguna propiedad de una portadora analógica según su información original (se realizará en el transmisor) y la demodulación es la que convertirá una portadora a su información original (se llevará a cabo en el receptor).
La señal de banda base será la encargada de modular la portadora principal.
La traslación de frecuencia es el proceso que permite convertir una frecuencia sencilla o banda de frecuencias a otra ubicación del espectro de la frecuencia total.
Las dos razones del porque es necesario modular en un sistema de comunicaciones analógicas son:
- Es muy difícil radiar señales a frecuencias bajas por la atmósfera de la Tierra en energía electromagnética.
- Las señales de información ocupan la misma banda de frecuencia por lo que si se transmitieran en su forma original se interferirían.
2. El espectro electromagnético
Un sistema de comunicaciones electrónica tiene como propósito comunicar información entre dos o más estaciones. Esto se lleva a cabo convirtiendo la señal original en energía electromagnética, una vez hecho esto se transmite está energía a los destinos deseados y finalmente se vuelve a convertir a su forma original.
2.1 Frecuencias de transmisión
El espectro de la frecuencia electromagnética está dividido en bandas y cada una de éstas tiene un nombre y límites.
2.2 Clasificación de transmisores
Los transmisores de radio se clasifican de acuerdo al ancho de banda, tipo de modulación y el tipo de información inteligente que llevan. Por otro lado las clasificaciones de emisiones se identifican por 3 símbolos que contienen una combinación de letras y números (el primer símbolo es la letra que designa el tipo de modulación de la portadora, el segundo identifica el tipo de emisión y el tercero es una letra que describe la información que se transmite).

º
3. Ancho de banda y capacidad de información
En un sistema de comunicaciones existen dos grandes limitaciones: el ruido y el ancho de banda. El ancho de banda es la banda de paso mínima que se requiere para propagar la información de la fuente a través del sistema y debe ser lo suficientemente grande o ancha para que pasen todas las frecuencias significativas.La capacidad de información se trata de una medida de cuanta información de la fuente puede transportarse por el sistema en un período de tiempo, por lo tanto depende del ancho de banda y el tiempo de transmisión.
4. Modos de transmisión- Simplex (SX) o solo de un sentido. Con esta operación la transmisión solo pue-
de existir en una sola dirección, es decir se recibe o se transmite.- Half-duplex (HDX) o sistemas con alternativa de dos sentidos. Con esta opera-
ción se puede transmitir en ambas direcciones pero no al mismo tiempo.- Full-duplex (FDX) o línea simultanea de doble sentido. Con esta operación se
puede transmitir en ambos sentidos y al mismo tiempo pero entre las dos mis-mas ubicaciones.
- Full/Full-duplex (F/FDX). Con esta operación se recibe y transmite simultanea-mente pero no hay necesidad de que sean entre las dos mismas ubicaciones.
5. Arreglo de circuitos

º
Se le llama arreglo de circuitos a las configuraciones que se le pueden hacer a los circuitos de comunicaciones electrónicos y pueden incluir transmisión de dos y cuatros hilos.
5.1 Transmisión de 2 hilos
Esta transmisión contiene dos cables (uno para la señal y otro para la tierra física) o una configuración de circuito que equivale a dos cables. Los cables son capaces de realizar una transmisión en ambos sentidos pero el transmisor y el receptor no lo pueden hacer, para que se pueda realizar éstos tienen que ser conmutados.La transmisión half-duplex y full-duplex se pueden realizar si se utiliza alguna técnica de modulación para combinar las dos señales para que no interfieran la una con la otra.
5.2 Transmisión a cuatro hilos
Este tipo de transmisión consiste en cuatro cables ( dos para cada dirección, uno de tierra física y otro de señal) o una configuración de circuito equivalente a cuatro hilos. Visto de otra manera este tipo de transmisión es igual a dos circuitos de dos hilos y están hechos para las transmisiones full-duplex.
Una de las ventajas de este tipo de transmisión sobre el de dos hilos es que es menos ruidoso y produce más aislamiento entre las direcciones de transmisión cuando se utiliza una operación.
5.3 Híbridos y supresores de eco
º
Un híbrido es cuando un circuito de dos hilos se conecta a uno de cuatro para lograr el afecto de la interface. Se utiliza para igualar impedancias y proporcionar aislamiento entre las dos direcciones del flujo de señales.
La bobina híbrida compensa las variaciones de impedancia en la porción de dos hilos, los amplificadores y atenuadores varían el voltaje de la señal según los requerimientos y los ecualizadores compensan los deterioros en la línea de transmisión que afecta la respuesta a la frecuencia de la señal transmitida.
6. Análisis de señales
Se utiliza para analizar y predecir el funcionamiento del circuito basándose en la distribución de potencia y en la composición de frecuencia de la señal de información.
6.1 Señales senoidales
Es el análisis matemático de la frecuencia, longitud de onda y voltaje de una señal.
v (t )=V sen (2πft+θ ) ó v (t )=V cos (2 πft+θ )i (t )=I sen (2 πft+θ ) ó i (t )=I cos (2πft+θ )
en dondev (t)= onda de voltaje que varía senoidalmente con el tiempo. i (t)= onda de corriente que varía senoidalmente con el tiempo.V = voltaje pico (volts).f= frecuencia (Hertz).Θ= fase (radianes).I= corriente pico (amperes)2πf= ω velocidad angular (radianes por segundo).
Como el senθ= cos (θ-90°) por lo tanto:v (t )=V sen (2πft+θ )=V cos (2πft+θ−90 °)v (t )=V cos (2 πft+θ )=Vsen (2πft+θ+90° )

º
Estas fórmulas son utilizadas cuando la onda es periódica, ya que se pueden analizar en el dominio del tiempo o la frecuencia.
6.1 Ondas periódicas no senoidales (complejas)
Toda onda repetitiva formada por más de una onda senoidal o cosenoidal relacionadas armónicamente es una onda compleja y para analizarlas se utilizan las series de Fourier.
Las series de Fourier cambian una señal del dominio del tiempo a una del dominio de la frecuencia.
La simetría de la onda describe la simetría de una forma de onda en el dominio del tiempo, en donde el eje horizontal representara el tiempo y el vertical la amplitud.
-simetría par. Una forma de onda con voltaje periódico simétrica en el eje vertical (amplitud).
-simetría impar. Si una forma de onda de voltaje periódico es simétrica sobre una línea a la mitad de los ejes vertical y horizontal negativos y pasa por el origen de la coordenada.
6.2 Series de Fourier para una forma de onda rectangular

º
El ciclo de trabajo (DC) para la forma de onda es la relación del tiempo activo del pulso al periódo de la forma de onda.
DC=τ /T DC (% )=( τT ) x100
En donde:
DC= ciclo de trabajo como decimalDC(%)=ciclo de trabajo como porcentajeτ=¿ ancho del pulso de la onda rectangular (segundos)T= periodo de la onda rectangular (segundos)
Las siguientes características se cumplen en todas las formas de onda rectangulares re-petitivas:
1. La componente de cd es igual a la amplitud del pulso por el ciclo de trabajo.2. Hay componentes de 0 V en la frecuencia 1/ hertz y en todos los múltiplos enteros de esa frecuencia que cumplan con T _ n, siendo n _ cualquier entero impar.3. La envolvente de la frecuencia en función del tiempo, de las componentes del espectro, tiene la forma de una onda senoidal amortiguada en la que todas las componentes espec-trales en lóbulos de número impar son positivas, y todas las componentes espectrales en los lóbulos pares son negativas.
6.3 Espectros de potencia y energía
En la sección anterior se usaron las series de Fourier para comprender mejor la representación de una señal compleja en el dominio de la frecuencia y del tiempo. Sin embargo, hay otra aplicación importante de la serie de Fourier. El objetivo de un canal de comunicaciones es transferir energía electromagnética de una fuente a un destino. Así, la relación entre la cantidad de energía transmitida y la recibida es una consideración importante. La potencia eléctrica es la rapidez con la cual se disipa, se entrega o se usa la
energía, y es una función del cuadrado del voltaje o de la corriente (P=E2
R ) o(P=I 2×R ).
Para las relaciones de potencia, la ecuación de Fourier, f(t), se reemplaza por [ f (t )]2.

º
En la fig. 1-22 se puede ver que la potencia de un pulso se dispersa dentro de un espectro de frecuencias relativamente ancho. Por consiguiente, si el ancho de banda de un canal de comunicaciones tiene la suficiente anchura para pasar sólo las frecuencias del lóbulo primario, transferirá al receptor la mayor parte de la energía que contiene el pulso.
6.4 Transformadas de Fourier discreta y rápida
Muchas formas de onda que se manejan en los sistemas normales de comunicaciones no se pueden definir en forma satisfactoria con ecuaciones matemáticas. En consecuencia se desarrolló, en 1965, un nuevo algoritmo, llamado transformada rápida de Fourier (FFT, de fast Fourier transform), por Cooley y Tukey. Con la FFT, el tiempo de cómputo es proporcional a n log2 n, y no a n2 . Hoy se cuenta con la FFT en forma de subrutina, en muchas bibliotecas de subrutinas científicas en los grandes centros de cómputo.
6.5 Efectos de limitación de banda sobre las señales
Todos los canales de comunicaciones tienen un ancho de banda limitado y, en consecuencia, un efecto limitador sobre las señales que se propagan por ellos. Se puede considerar que un canal de comunicaciones es un filtro ideal de fase lineal con ancho de banda finito. En los sistemas de comunicaciones, la limitación de banda reduce la capacidad de información del sistema y si se impone demasiada limitación, se puede eliminar la señal de información de la forma de onda compuesta.

º
7. Mezclado
El mezclado es el proceso de combinar dos o más señales, y es un proceso esencial en comunicaciones electrónicas. En esencia hay dos formas en las que se pueden combinar o mezclar las señales: lineal y no lineal
7.1 Suma lineal.
La suma lineal se presenta cuando se combinan dos o más señales en un dispositivo lineal, como puede ser una red pasiva o un amplificador de señal pequeña. Las señales se combinan de tal manera que no se producen nuevas frecuencias, y la forma de onda combinada no es más que la suma lineal de las señales individuales
7.2 Mezclado no lineal.
El mezclado no lineal sucede cuando se combinan dos o más señales en un dispositivo no lineal, como por ejemplo un diodo o un amplificador de señal grande. En el mezclado no lineal, las señales de entrada se combinan en forma no lineal y producen componentes adicionales de frecuencia.

º
8. Ruido eléctrico
Se define al ruido eléctrico como cualquier energía eléctrica indeseable que queda entre la banda de paso de la señal. Se puede clasificar al ruido en dos categorías: correlacionado y no correlacionado. La correlación implica una relación entre la señal y el ruido. Por consiguiente, el ruido correlacionado sólo existe cuando hay una señal. Por otra parte, el ruido no correlacionado está presente siempre, haya o no una señal.
8.1 Ruido no correlacionado
Ruido externo. El ruido externo es el que se genera fuera del dispositivo o circuito. Hay tres causas principales del ruido externo: atmosféricas, extraterrestres y generadas por el hombre.
Ruido atmosférico. El ruido atmosférico se origina en perturbaciones eléctricas naturales que se generan dentro de la atmósfera terrestre. Al ruido atmosférico se le suele llamar electricidad estática, parecido al de las frituras, que se oye con frecuencia en una bocina cuando no tiene señal. La fuente de la mayor parte de la electricidad estática se encuentra en las condiciones eléctricas naturales, como por ejemplo los rayos. A veces, la electricidad estática está en forma de pulsos que dispersan energía dentro de una amplia gama de frecuencias. Sin embargo, la magnitud de esta energía es inversamente proporcional a su frecuencia. Por consiguiente, el ruido atmosférico es relativamente insignificante a frecuencias mayores de más o menos 30 MHz.
Ruido extraterrestre. El ruido extraterrestre consiste en señales eléctricas que se originan fuera de la atmósfera de la Tierra y, en consecuencia, a veces se le llama ruido de espacio profundo. El ruido extraterrestre se origina en la Vía Láctea, en otras galaxias y en el Sol. También se subdivide en dos categorías: solar y cósmico.
Ruido causado por el hombre. Las fuentes principales de este ruido son los mecanismos que producen chispas, como por ejemplo los conmutadores de los motores eléctricos, los sistemas de encendido automotriz, el equipo generador y conmutador de energía eléctrica y las lámparas fluorescentes.
Ruido interno. El ruido interno es la interferencia eléctrica generada dentro de un dispositivo o circuito. Hay tres clases principales de ruido generado internamente: de disparo, de tiempo de tránsito y térmico.
Ruido de disparo. Este ruido se debe a la llegada aleatoria de portadoras (agujeros y electrones) al elemento de salida de un dispositivo electrónico, como por ejemplo un diodo, un transistor de efecto de campo o un transistor bipolar.
Ruido de tiempo de tránsito. Cualquier modificación a una corriente de portadores, cuando pasan de la entrada a la salida de un dispositivo (como por ejemplo, desde el emisor al colector de un transistor) produce una variación irregular y aleatoria, que se clasifica como ruido de tiempo de tránsito.

º
Ruido térmico. Este ruido se asocia con el movimiento rápido y aleatorio de los electrones dentro de un conductor, producido por la agitación térmica. Este movimiento fue observado por primera vez por Robert Brown, botánico inglés.
8.2 Ruido correlacionado
El ruido correlacionado es aquel que se relaciona mutuamente (se correlaciona) con la señal, y no puede estar en un circuito a menos que haya una señal de entrada. Dicho en términos sencillos: ¡no hay señal, no hay ruido! El ruido correlacionado se produce por amplificación no lineal, e incluye la distorsión armónica y de intermodulación, ya que las dos son formas de distorsión no lineal.
Distorsión armónica. Hay distorsión armónica cuando se producen las armónicas no deseadas de una señal, debido a una amplificación no lineal (mezclado). Las armónicas son múltiplos enteros de la señal original de entrada. Esta señal original es la primera armónica, y se llama frecuencia fundamental.
Distorsión por intermodulación. Es la generación de frecuencias indeseables de suma y diferencia, cuando se amplifican dos o más señales en un dispositivo no lineal, que puede ser un amplificador de señal grande.
Ruido impulsivoEl ruido impulsivo se caracteriza por tener picos de gran amplitud y corta duración dentro del espectro total del ruido. Como indica el nombre, el ruido impulsivo consiste en ráfagas repentinas de pulsos de forma irregular, que por lo general duran entre algunos microsegundos y una fracción de milisegundo, dependiendo de su amplitud y su origen. La importancia de los pulsos repentinos en las comunicaciones de voz suele ser más molesto que destructor, porque los pulsos producen un ruido corto, de explosión o de crepitación. Sin embargo, en los circuitos de datos este ruido impulsivo puede ser devastador.
InterferenciaLa interferencia es una forma de ruido externo y, como el nombre indica, significa “perturbar o estorbar”. Se produce interferencia eléctrica cuando las señales de información de una fuente producen frecuencias que caen fuera de su ancho de banda asignado, e interfieren con otras señales de otra fuente. La mayor parte de la interferencia se produce cuando las armónicas o las frecuencias de producto cruzado de una fuente llegan a la banda de paso de un canal vecino.

º
CAPITULO 2. Generación de señales
1. Osciladores
La definición de oscilar es vibrar o cambiar de uno a otro estado. Un oscilador es un dispositivo que genera una forma de onda repetitiva. Una oscilación eléctrica es un cambio repetitivo de voltaje o de corriente en una forma de onda. Existen dos tipos de osciladores, A) oscilador autosostenido, autónomo o de funcionamiento libre. B) osciladores no autosostenidos, con disparo de inicio u osciladores monoestables. En esencia, un oscilador convierte un voltaje de cd en la entrada a un voltaje de salida de ca. La forma de la onda de salida puede ser una senoidal, una onda cuadrada, una onda en diente de sierra, siempre y cuando se repita a intervalos periódicos.
1.1Osciladores retroalimentados
Un oscilador retroalimentado genera una señal de salida de ca, de la cual se regresa una pequeña parte a la entrada, donde se amplifica. La señal amplificada de la entrada aparece en la salida, y el proceso se repite. Hay cuatro requisitos para que trabaje un oscilador retroalimentado: Amplificación, Retroalimentación positiva, Componentes que determinan la frecuencia y una Fuente de poder. Modelo eléctrico de un circuito (amplificado) oscilador retroalimentado.
1.2Osciladores no sintonizados
El oscilador de puente de Wien es un oscilador RC no sintonizado de corrimiento de fase, que usa retroalimentación tanto positiva como negativa. Es un circuito oscilador relativamente estable, de baja frecuencia, que se sintoniza con facilidad, y se suele usar en generadores de señal para producir frecuencias de 5 Hz a 1 MHz. La red de adelanto-atraso y el divisor resistivo de voltaje forman un puente de Wien (de donde procede el nombre de oscilador con puente de Wien).

º
1.3Osciladores sintonizados
Los osciladores LC son circuitos osciladores que usan circuitos tanque LC para establecer la frecuencia. El funcionamiento de un circuito tanque implica intercambio de energía entre cinética y potencial. Una vez que se inyecta corriente en el circuito (momento t1), se intercambia energía entre el inductor y el capacitor, y se produce un voltaje correspondiente de salida (tiempos t2 a t4). La frecuencia de funcionamiento de un circuito tanque LC no es más que la frecuencia de resonancia de la red LC en paralelo, y el ancho de banda es una función de la Q del circuito.Entre los osciladores LC están el de a) Hartley, b) Colpitts.
1.4Estabilidad de la frecuencia
La estabilidad de frecuencia es la capacidad de un oscilador para permanecer en una frecuencia fija, y es muy importante en los sistemas de comunicaciones. La estabilidad a corto plazo se afecta principalmente debido a fluctuaciones en los voltajes de operación de cd, mientras que la estabilidad a largo plazo es una función del envejecimiento de los componentes y de cambios en la temperatura y la humedad del ambiente. En general, la estabilidad de frecuencia se caracteriza como un porcentaje de cambio en la frecuencia (tolerancia) respecto al valor deseado.
1.5Osciladores de cristal
Los osciladores de cristal son circuitos osciladores de retroalimentación en los que se sustituye el circuito tanque LC con un cristal, como componente para determinar la frecuencia. Pueden producir frecuencias precisas y estables para contadores de frecuencia, sistemas de navegación electrónica, radiotransmisores y radiorreceptores, televisiones, grabadoras de video (VCR), relojes para sistemas de cómputo y muchas otras aplicaciones. La cristalografía es el estudio de la forma, estructura, propiedades y clasificaciones de los cristales. Las dimensiones físicas de un cristal, en especial su espesor y el lugar y la forma de cortarlo, determinan sus propiedades eléctricas y mecánicas.

º
2. Osciladores de integración a gran escala
Los osciladores de circuito integrado tienen una excelente estabilidad de frecuencia y un amplio margen de sintonía, y por ser fáciles de usar. Los generadores de forma de onda y los generadores de funciones se usan en forma extensa en equipos de comunicaciones y de telemetría, así como en laboratorios, para equipos de prueba y calibración. Hoy, es posible fabricar generadores de forma de onda con circuito integrado que tienen un desempeño comparable a los generadores discretos complejos, con sólo una fracción de su costo. Los generadores LSI (con integración en gran escala) que se consiguen hoy incluyen generadores de funciones, temporizadores, relojes programables, osciladores controlados por voltaje, osciladores de precisión y generadores de forma de onda.
2.1Generación de forma de onda con circuito integrado
Un generador de forma de onda es un circuito oscilador que genera formas de onda bien definidas y estables, que se pueden modular o barrer externamente sobre un intervalo determinado de frecuencia. Un generador de onda típico está formado por cuatro secciones básicas: 1) un oscilador, que genera la forma de onda periódica básica, 2) un conformador de onda, 3) un modulador opcional de AM y 4) un amplificador separador de salida para aislar el oscilador de la carga y proporcionar la corriente necesaria.
3. Circuito de fase cerrada
El circuito de fase cerrada (PLL) se usa en forma extensa dentro de las comunicaciones electrónicas para realizar la modulación, demodulación, generación de frecuencias y parasíntesis de frecuencias.Un PLL es un sistema de control de retroalimentación de circuito cerrado en donde la señal de retroalimentación es una frecuencia en lugar de un simple voltaje el circuito básico del circuito de fase cerrada se muestra la figura 2-21 consiste de cuatro bloques principales un comparador de fase un filtro de pasa bajas un amplificador de baja ganancia y un oscilador de voltaje.

º
Parámetros clave de los PLL que indica que indican su rango útil de frecuenciasEl rango de bloqueo se define como el rango de frecuencias que se encuentra en la vecindad de la frecuencia natural del VCO (f) sobre el cual el PLL puede mantener un bloqueo con una señal de entradaEl rango de captura se define como la banda de frecuencia en la vecindad (f) en donde el pelele puede establecer o adquirir bloqueo enlace con una señal de entrada.Un oscilador de voltaje controlado (VCO) es un oscilador más específicamente un multivibrador operando libremente con una frecuencia de oscilación estable que depende de un voltaje de polarización externo la salida de un beso es una frecuencia y su entrada es una señal polarizada o de control que puede ser un voltaje de corriente directa o de corriente alterna.Un comparador de fase también llamado detector de fase es un dispositivo no lineal con dos señales de entrada: una frecuencia generada externamente (fi) y la frecuencia de salida del VCO (fo), la salida de un comparador de fase es el producto de las dos señales de la frecuencia f1 y f2 por lo tanto contiene sus frecuencias de suma y diferencia (f1± f2).El comparador de fase produce un voltaje de salida que es proporcional a la diferencia en fase entre Vo y Vi.
θe=θo−θiΘe = error de fase (radianes)Θo = fase de voltaje para la señal de entrada VCO (radianes)Θi = fase de voltaje para la señal de entrada externa (radianes)El voltaje de salida del comparador es lineal para los errores de fase entre 0° y 180°.
Kd=V salida
θe=
2viπ
Kd = función de transferencia o ganancia (volts por radianes)Vsalida = voltaje de salida para el comparador (volts)Θe = error de fase (radianes)La ganancia de lazo para un PLL es simplemente el producto las ganancias individuales o funciones de transferencia alrededor del lazo
3.1Circuito integrado de lazo de fase cerrada de precisión
El xr 215 es un sistema de lazo de fase cerrada monolítico ultra estable diseñado para una amplia variedad de aplicaciones dentro de los sistemas de comunicación analógica y digital es especialmente deseable para la demodulación de fm o fsk síntesis de frecuencias y aplicaciones para filtros de rastreo

º
4. Sintetizadores de frecuencia
Un sintetizador de frecuencia se utiliza para generar muchas frecuencias de salida a través de la suma resta multiplicación y división de un número más pequeño de fuentes fijas de frecuencias.
El sintetizador ideal de frecuencias puede generar cientos o hasta miles de frecuencias distintas con un oscilador de cristal simple los sintetizadores de frecuencia se utilizan extensamente en equipos de prueba y medición y equipo para la generación de tonos para marcar unidades de control remoto sistemas de comunicación de canales múltiples y sintetizadores de música.
Esencialmente hay dos métodos para la síntesis de frecuencias directa e indirecta con la síntesis de frecuencias directa se generan frecuencia de salida múltiples al mezclar las salidas desde dos o más fuentes de frecuencias controladas por cristal o al dividir o multiplicar la frecuencia de salida desde un oscilador de cristal simple con la síntesis de frecuencia indirecta un divisor/multiplicador controlado por retroalimentación como el PLL se utiliza para generar frecuencia de salida múltiples la síntesis de frecuencias indirecta es más lenta y más susceptible al ruido sin embargo este es menos costosa y requiere filtros menos complicados y muy pocos en cantidad que la síntesis de frecuencias directa.

º