cs 326a: motion planning criticality-based motion planning: target finding
Post on 20-Dec-2015
225 views
TRANSCRIPT

CS 326A: Motion Planning
Criticality-Based Motion Planning: Target Finding

Trapezoidal decomposition


Criticality-Based Planning
Define a property P Decompose the configuration space into
“regular” regions (cells) over which P is constant.
Use this decomposition for planning Issues:
- What is P? It depends on the problem- How to use the decomposition?
Approach is practical only in low-dimensional spaces:- Complexity of the arrangement of cells- Sensitivity to floating point errors

Topics of this class and the next one
Target finding Information (or belief) state/space
Assembly planning Path space

6
Example
robot’s visibilityregion
hidingregion 1
cleared region
2 3
4 5 6
robot

7
Problem
A target is hiding in an environment cluttered with obstacles
A robot or multiple robots with vision sensor must find the target
Compute a motion strategy with minimal number of robot(s)

8
Assumptions
Target is unpredictable and can move arbitrarily fast
Environment is polygonal Both the target and robots are
modeled as points A robot finds the target when the
straight line joining them intersects no obstacles (omni-directional vision)

9
Animated Target-Finding Strategy

10
Does a solution always exist
for a single robot?
Hard to test:No “hole” in the workspace
Easy to test: “Hole” in the workspace
No !

11
Effect of Geometry on the Number of Robots
Two robotsare needed

12
Effect of Number n of EdgesMinimal number of robots N = (log n)

13
Effect of Number h of Holes
N=Θ( h)

14
Information State
Example of an information state = (x,y,a=1,b=1,c=0) An initial state is of the form (x,y,a=1,b=1,...,u=1) A goal state is any state of the form (x,y,a=0,b=0,...,
u=0)
(x,y)
a = 0 or 1
c = 0 or 1
b = 0 or 1
0 cleared region1 contaminated region
visibility region
obstacle edgefree edge

15
Critical Line
a=0b=1
(x,y,a=0,b=1)
Information state is unchanged(x,y,a=0,b=1)
a=0b=1
a=0b=0
(x,y,a=0,b=0)Critical line
contaminated area
cleared area

16
Grid-Based Discretization
Ignores critical lines Visits many “equivalent” states Many information states per grid point Potentially very inefficient

17
Discretization into Conservative Cells
In each conservative cell, the “topology” of the visibilityregion remains constant, i.e., the robot keeps seeing the same obstacle edges

18
Discretization into Conservative Cells
In each conservative cell, the “topology” of the visibilityregion remains constant, i.e., the robot keeps seeing the same obstacle edges

19
Discretization into Conservative Cells
In each conservative cell, the “topology” of the visibilityregion remains constant, i.e., the robot keeps seeing the same obstacle edges

20

21
Search Graph {Nodes} = {Conservative Cells} X {Information
States}
Node (c,i) is connected to (c’,i’) iff:• Cells c and c’ share an edge (i.e., are adjacent)• Moving from c, with state i, into c’ yields state i’
Initial node (c,i) is such that:• c is the cell where the robot is initially located• i = (1, 1, …, 1)
Goal node is any node where the information state is (0, 0, …, 0)
Size is exponential in the number of edges

22
Example
A
B C D
E
(C,a=1,b=1)
(D,a=1)(B,b=1)
a b

23
A
B C D
E
(C,a=1,b=1)
(D,a=1)(B,b=1)
(E,a=1)(C,a=1,b=0)
Example

24
A
B C D
E
(C,a=1,b=1)
(D,a=1)(B,b=1)
(E,a=1)(C,a=1,b=0)
(B,b=0) (D,a=1)
Example

25
A
C D
E
(C,a=1,b=1)
(D,a=1)(B,b=1)
(E,a=1)(C,a=1,b=0)
(B,b=0) (D,a=1)Much smaller search tree than with grid-based discretization !
B
Example

26
Visible
Cleared
Contaminated
Example of Target-Finding Strategy
27
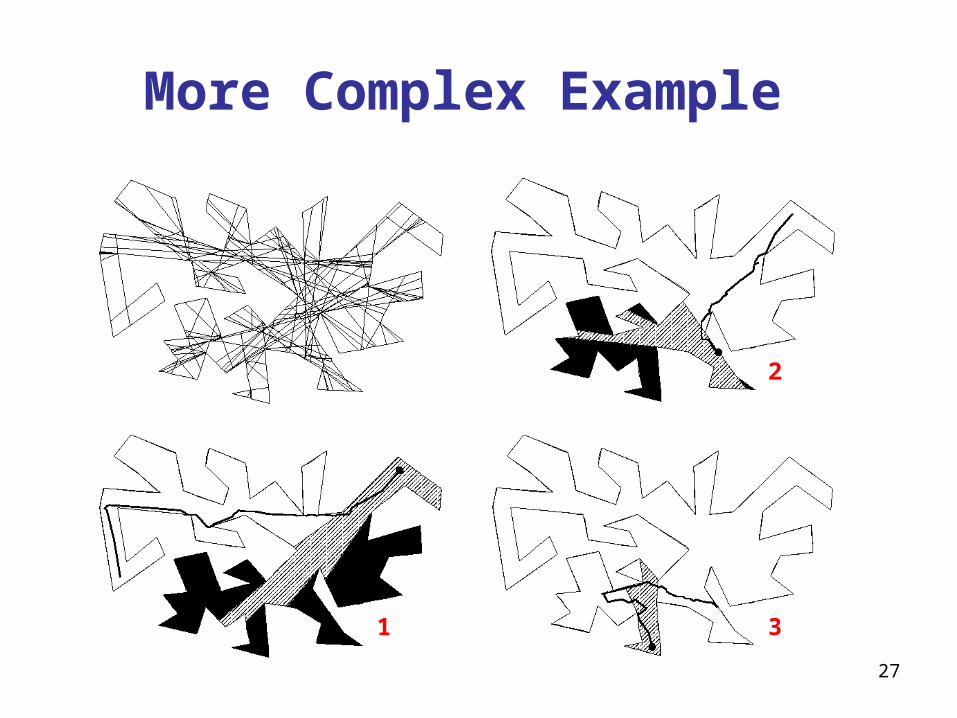
More Complex Example
1
2
3

28
Example with Recontaminations
654
321

29
Example with Linear Number of
RecontaminationsRecontaminated area
43
21

30
Example with Two Robots(Greedy algorithm)

31
Example with Two Robots

32
Example with Three Robots

33
Robot with Cone of Vision

34
Other Topics
Dimensioned targets and robots, three-dimensional environments
Non-guaranteed strategies Concurrent model construction and
target finding Planning the escape strategy of the
target