controllo diretto della coppia - library.e.abb.com · controllate direttamente tramite la corrente...
TRANSCRIPT

Controllo Diretto della Coppia- la più avanzata tecnologia al mondo per gli azionamenti in c.a.
Guida tecnica n. 1 Guida tecnica n. 1


Indice
1 Introduzione ..............................................................Generalità ....................................................................Scopo di questo manuale ............................................Utilizzo della Guida .....................................................
2 Evoluzione del Controllo Diretto della Coppia .......Cos'è un azionamento a velocità variabile?.................Riepilogo .....................................................................Azionamenti in c.c. .....................................................
Caratteristiche .........................................................Vantaggi ..................................................................Svantaggi ................................................................
Azionamenti in c.a. - Introduzione ...............................Azionamenti in c.a. - Controllo di frequenzacon la tecnologia PWM ...............................................
Caratteristiche .........................................................Vantaggi .................................................................Svantaggi ...............................................................
Azionamenti in c.a. - Controllo vettorialecon la tecnologia PWM ..............................................
Caratteristiche ........................................................Vantaggi .................................................................Svantaggi ...............................................................
Azionamenti in c.a. - Controllo diretto della coppia ....Variabili di controllo ................................................
Confronto degli azionamenti a velocità variabile ........
3 Domande e Risposte ................................................Generalità ...................................................................Prestazioni .................................................................Funzionamento ...........................................................
4 Principi teorici alla base del controllo ...................Come funziona la tecnologia DTC ..............................Anello di controllo della coppia ...................................
Fase 1 Misure di tensione e di corrente .................Fase 2 Modello di motore adattivo .........................Fase 3 Comparatore di flusso e di coppia ..............Fase 4 Selettore impulsi ottimali ............................
Controllo di velocità ....................................................Fase 5 Controllore del riferimento di coppia ...........Fase 6 Controllore di velocità .................................Fase 7 Controllore del riferimento di flusso ............
5 Indice alfabetico .......................................................
5555
66677788
99
1010
10101111121213
15151622
2626272727282829292929
30
Guida tecnica n.1 - Controllo Diretto della Coppia4

5Guida tecnica n.1 - Controllo Diretto della Coppia
Controllo Diretto della Coppia - o DTC - è la tecnologia degliazionamenti in c.a. più avanzata al mondo.
Scopo della presente Guida Tecnica è di descrivere cosa siala tecnologia DTC, perché e come si sia evoluta, i principiteorici alla base del suo successo e le caratteristiche e ivantaggi da essa offerti.
Sforzandosi di essere più pratica possibile, la presente guidarichiede una conoscenza base dei principi di controllo deimotori in c.a.
Si rivolge principalmente a progettisti, compilatori di specifiche,responsabili acquisti, OEM e utenti finali operanti in settoriquali il trattamento acque, l'industria chimica, la carta, lagenerazione di energia, la movimentazione materiali, ilcondizionamento e altri mercati.
Di fatto, chiunque utilizzi gli azionamenti a velocità variabile(Variable Speed Drives, VSD) e desideri trarre vantaggio daquesta tecnologia, troverà molto utile consultare la presenteGuida Tecnica.
La presente guida è stata realizzata per illustrare perché ecome si sia sviluppata la tecnologia DTC.
Per saperne di più in merito all'evoluzione degli azionamentidall'iniziale tecnologia in c.c., attraverso la tecnologia in c.a.fino alla tecnologia DTC, consultare la guida a partire dallaCapitolo 2 (pagina 6).
Per maggiori informazioni sulle prestazioni della tecnologiaDTC e sulle relative modalità di funzionamento e potenzialeapplicativo, si rimanda invece alla Capitolo 3 (pagina 15),Domande e Risposte.
Per una spiegazione dei principi teorici di controllo alla basedella tecnologia DTC, si rimanda a pagina 26.
Capitolo 1 - Introduzione
Scopo diquestomanuale
Generalità
UtilizzodellaGuida

Guida tecnica n.1 - Controllo Diretto della Coppia6
Riepilogo
Cos'è unazionamentoa velocitàvariabile?
Capitolo 2 - Evoluzione del Controllo Diretto della Coppia
Per trovare una risposta a questa domanda occorre innanzitutto comprendere che la funzione di base di un azionamentoa velocità variabile (Variable Speed Drive, VSD) è di controllareil flusso di energia dalla rete al processo.
L'energia viene fornita al processo tramite l'albero motore. Lostato dell'albero motore è descritto da due grandezze fisiche,la coppia e la velocità. Per controllare il flusso di energia occorrequindi, in ultima analisi, controllare queste due grandezze.
Nella pratica è possibile controllare sia l'una che l'altra, e siparlerà quindi, a seconda dei casi, di "controllo della coppia"o di "controllo della velocità". Inoltre, quando un VSD funzionanella modalità a controllo della coppia, quest'ultima dipendedal carico.
Inizialmente, come azionamenti a velocità variabile si utilizzanoi motori in c.c. poiché consentivano di ottenere con facilità lavelocità e la coppia richieste, senza bisogno di ricorrere acomponenti elettronici sofisticati.
L'evoluzione tecnologica degli azionamenti a velocità variabilein c.a. è stata dunque dettata dal desiderio di emulare leeccellenti prestazioni dei motori in c.c., quali la rapida rispostain coppia e la precisione in velocità, utilizzando al contempo imotori in c.a., robusti, economici e praticamente privi dimanutenzione.
In questa sezione prenderemo inconsiderazione l'evoluzione della tecnologiaDTC, con particolare riferimento alle quattropietre miliari degli azionamenti a velocitàvariabile, ovvero:
• Azionamenti per motori in c.c. 7• Azionamenti in c.a., controllo di frequenza, PWM 9• Azionamenti in c.a., controllo vettoriale, PWM 10• Azionamenti in c.a., Controllo Diretto della Coppia 12
Prenderemo in esame ciascuno di questi argomenti, delineandoun quadro d'insieme che consenta di evidenziare le differenzefondamentali tra l'uno e l'altro.

7Guida tecnica n.1 - Controllo Diretto della Coppia
Azionamentiin c.c.
• Orientamento del campo tramite commutatore meccanico• Le variabili di controllo sono la corrente di indotto e di
campo misurate DIRETTAMENTE sul motore• Il controllo della coppia è diretto
In un motore in c.c., il campo magnetico è generato dallacorrente che passa attraverso l'avvolgimento di campo dellostatore. Questo campo è sempre ad angolo retto rispetto alcampo creato dall'avvolgimento dell'indotto. Tale condizione,nota come "orientamento del campo", risulta necessaria pergenerare la coppia massima. Il complesso commutatore-spazzole assicura che questa condizione venga sempremantenuta, indipendentemente dalla posizione del rotore.
Una volta raggiunto l'orientamento del campo, la coppia delmotore in c.c. risulta facilmente controllabile variando la corrented'indotto e mantenendo costante la corrente dimagnetizzazione.
Il vantaggio offerto dagli azionamenti in c.c. è che la velocità ela coppia, i due parametri più importanti per il cliente, vengonocontrollate direttamente tramite la corrente dell'indotto, dove lacoppia corrisponde all'anello di controllo interno, e la velocità aquello esterno (vedere la Figura 1).
• Controllo della coppia preciso e veloce
• Risposta dinamica alle variazioni di velocità
• Semplice da controllare
Inizialmente per il controllo della velocità variabile si utilizzavanogli azionamenti in c.c. poiché garantivano buone prestazioni alvariare della coppia e della velocità, a fronte di un elevato gradodi precisione.
Figura 1: Anello di controllo di un azionamento per motori in c.c.
Evoluzione del Controllo Diretto della Coppia
Caratteristiche
Vantaggi
Azionamento in c.c.
Controllodella
velocità
Controllodella
coppia

Guida tecnica n.1 - Controllo Diretto della Coppia8
CustomerLocation
ApplicationEquipment Supplied
How it Works
Una macchina in c.c. è in grado di produrre una coppia con leseguenti caratteristiche:
• Diretta - la coppia del motore è proporzionale alla corrente diindotto: la coppia può essere quindi controllata direttamentee con precisione.
• Rapida - il controllo di coppia è rapido; il sistema diazionamento può assicurare una risposta in velocità altamentedinamica. La coppia può essere modificata istantaneamente seil motore viene alimentato da una sorgente di tipo idoneo.Gli azionamenti alimentati in tensione sono caratterizzati da unarisposta rapida poiché quest'ultima dipende soltantodalla costante di tempo elettrica del rotore (cioè dall'induttanzatotale e dalla resistenza nel circuito d'indotto).
• Semplice - l'orientamento del campo si ottiene attraverso unsemplice dispositivo meccanico denominato complessocommutatore-spazzole. Di conseguenza, non è necessario un circuitodi controllo elettronico che con la sua complessità contribuirebbe adaccrescere i costi del controllore del motore.
• Ridotta affidabilità del motore• Manutenzione regolare• Costi di acquisto del motore• Necessità di un encoder per la retroazione
I principali inconvenienti di questa tecnologia sono costituitidalla ridotta affidabilità del motore in c.c., dalla necessità diuna manutenzione regolare per spazzole e commutatori soggettia usura, dai costi di acquisto dei motori in c.c., e dalla necessitàdi utilizzare un encoder per la retroazione di velocità e diposizione.
Mentre un azionamento in c.c. produce una coppia facilmentecontrollata da zero alla velocità di riferimento e oltre, lameccanica del motore è molto più complessa e richiede unamanutenzione regolare.
• Ridotte dimensioni• Robusti• Configurazione semplice• Leggeri e compatti• Ridotta manutenzione• Costi ridotti
L'evoluzione tecnologica degli azionamenti in c.a. è stata inparte guidata dal desiderio di eguagliare le prestazioni degliazionamenti in c.c., quali la rapida risposta in coppia e laprecisione in velocità, sfruttando al contempo i vantaggiofferti dai motori standard in c.a.
Svantaggi
Azionamentiin c.a. -Introduzione
Evoluzione del Controllo Diretto della Coppia
9Guida tecnica n.1 - Controllo Diretto della Coppia
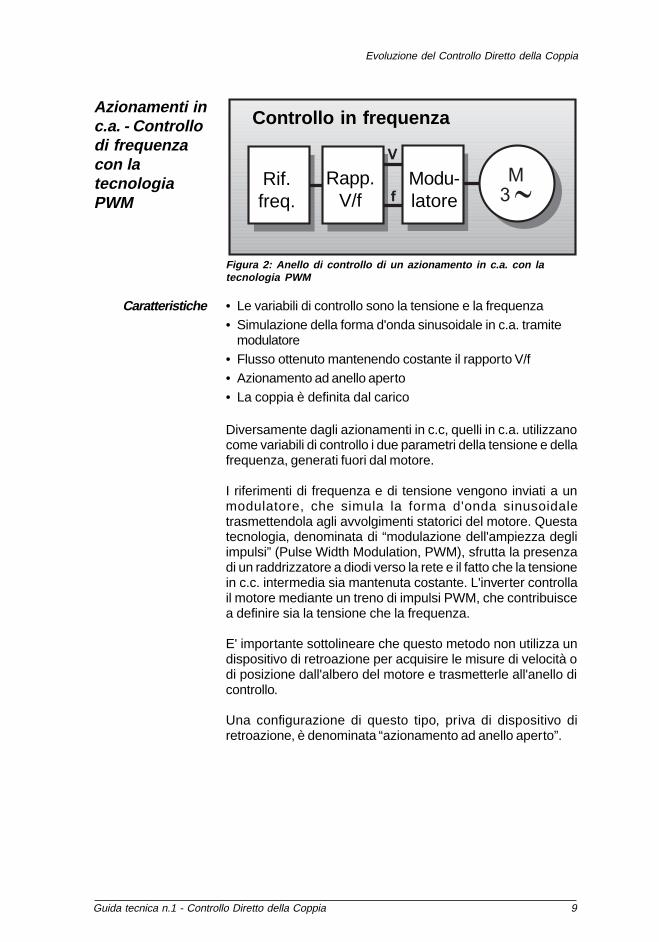
• Le variabili di controllo sono la tensione e la frequenza• Simulazione della forma d'onda sinusoidale in c.a. tramite
modulatore• Flusso ottenuto mantenendo costante il rapporto V/f• Azionamento ad anello aperto• La coppia è definita dal carico
Diversamente dagli azionamenti in c.c, quelli in c.a. utilizzanocome variabili di controllo i due parametri della tensione e dellafrequenza, generati fuori dal motore.
I riferimenti di frequenza e di tensione vengono inviati a unmodulatore, che simula la forma d'onda sinusoidaletrasmettendola agli avvolgimenti statorici del motore. Questatecnologia, denominata di “modulazione dell'ampiezza degliimpulsi” (Pulse Width Modulation, PWM), sfrutta la presenzadi un raddrizzatore a diodi verso la rete e il fatto che la tensionein c.c. intermedia sia mantenuta costante. L'inverter controllail motore mediante un treno di impulsi PWM, che contribuiscea definire sia la tensione che la frequenza.
E' importante sottolineare che questo metodo non utilizza undispositivo di retroazione per acquisire le misure di velocità odi posizione dall'albero del motore e trasmetterle all'anello dicontrollo.
Una configurazione di questo tipo, priva di dispositivo diretroazione, è denominata “azionamento ad anello aperto”.
Figura 2: Anello di controllo di un azionamento in c.a. con latecnologia PWM
Evoluzione del Controllo Diretto della Coppia
Caratteristiche
Azionamenti inc.a. - Controllodi frequenzacon latecnologiaPWM
Controllo in frequenza
Rif.freq.
Rapp.V/f
Modu-latore

Guida tecnica n.1 - Controllo Diretto della Coppia10
• Costi ridotti• Non occorre un dispositivo di retroazione - maggiore semplicità
Non essendovi un dispositivo di retroazione, il principio dicontrollo consente di configurare una soluzione semplice edeconomica per il controllo dei motori a induzione in c.a.
Questo tipo di azionamento è idoneo per le applicazioni chenon richiedono elevati livelli di precisione, ad esempio pompee ventilatori.
• Non utilizza l'orientamento di campo• Lo stato del motore viene ignorato• La coppia non è controllata• Uso di un modulatore che introduce un ritardo
Questa tecnologia, denominata di "controllo scalare", non prevedel'orientamento di campo del motore. Le principali variabili dicontrollo, costituite dalla frequenza e dalla tensione, vengonoapplicate agli avvolgimenti dello statore. Lo stato del rotore vieneignorato - in altri termini, non vi è alcuna retroazione del segnaledi posizione o di velocità. Di conseguenza, la coppia non puòessere controllata con un determinato grado di precisione.
Inoltre, questa tecnologia utilizza un modulatore che di normacontribuisce a rallentare la comunicazione dei segnali ditensione e di frequenza in ingresso e che richiede al motore dirispondere a questo segnale che varia.
Vantaggi
Azionamentiin c.a. -Controllovettoriale conla tecnologiaPWM
Evoluzione del Controllo Diretto della Coppia
Caratteristiche
Svantaggi
Figura 3: Anello di controllo vettoriale di un azionamentoin c.a. con tecnologia PWM
• Controllo dell'orientamento del campo con simulazionedell'azionamento in c.c.
• Simulazione delle caratteristiche elettriche del motore nel“modello del motore”
• Azionamento ad anello chiuso• Controllo INDIRETTO della coppia
Controllo vettoriale
Controllodella
velocità
Controllodella
coppia
Modu-latore

11Guida tecnica n.1 - Controllo Diretto della Coppia
Per simulare le condizioni operative di un motore in c.c. dalpunto di vista magnetico, ovvero per riprodurre il processo diorientamento del campo, il vettore "flusso" dell'azionamentodeve conoscere la posizione angolare del flusso rotoricoall'interno del motore a induzione in c.a.
Negli azionamenti basati sulla tecnologia PWM e di controllovettoriale, l'orientamento del campo si ottiene per via elettronica,e non meccanica, tramite il complesso commutatore-spazzoledel motore in c.c.
Le informazioni relative allo stato del rotore si ottengonomediante retroazione da encoder della velocità e della posizioneangolare del rotore relativamente al campo statorico. Gliazionamenti che utilizzano un encoder di velocità sono definiti“ad anello chiuso”.
Inoltre, le caratteristiche elettriche del motore sono riprodottematematicamente con l'ausilio di un microprocessore prepostoalla rielaborazione dei dati.
Il controllore elettronico del vettore "flusso" crea grandezzeelettriche quali la tensione, la corrente e la frequenza (le variabilicontrollate), e le trasmette al motore a induzione in c.a. tramiteun modulatore. Il controllo della coppia, quindi, è di tipoINDIRETTO.
• Buona risposta alle variazioni della coppia• Preciso controllo della velocità• Coppia massima alla velocità zero• Prestazioni analoghe a quelle di un azionamento in c.c.
Il controllo vettoriale assicura la coppia massima alla velocitàzero, fornendo quindi prestazioni pressoché analoghe a quelledi un azionamento in c.c.
• Necessità di retroazione• Costi elevati• Necessità di un modulatore
Per ottenere un elevato livello di precisione nel controllo dellavelocità e un'ottimale risposta al variare della coppia, si rendenecessario un dispositivo di retroazione. Questo può rivelarsicostoso e contribuire ad accrescere la complessità di untradizionale motore a induzione in c.a., di norma semplice.
Inoltre, occorre utilizzare un modulatore che rallenta lacomunicazione dei segnali di tensione e di frequenza in ingresso,e richiede al motore di rispondere a questo segnale variabile.
Benché il motore sia semplice dal punto di vista meccanico,l'azionamento risulta piuttosto complesso dal punto di vista elettrico.
Evoluzione del Controllo Diretto della Coppia
Vantaggi
Svantaggi

Guida tecnica n.1 - Controllo Diretto della Coppia12
Con la rivoluzionaria tecnologia DTC sviluppata da ABB,l'orientamento del campo si ottiene senza retroazione,utilizzando un'avanzata teoria che si basa su un modellomatematico del motore in c.a. capace di calcolarne la coppiadirettamente senza bisogno di modulazione. Le variabilicontrollate sono il flusso di magnetizzazione e la coppiadel motore .
Con la tecnologia DTC non vi è alcun modulatore né necessitàdi una tachimetrica o di un encoder per la retroazione dellavelocità o della posizione dell'albero motore.
La tecnologia DTC utilizza il più veloce hardware di elaborazionedei segnali digitali che sia disponibile e un modello matematicoavanzato con riferimento alle modalità di funzionamento delmotore stesso.
Il risultato è un azionamento con una risposta in coppiageneralmente dieci volte più veloce di un azionamento in c.a.o in c.c. La precisione dinamica degli azionamenti DTC è ottovolte migliore di ogni altro azionamento in c.a. ad anello apertoed è analoga a quella di un azionamento in c.c. con retroazione.
La tecnologia DTC consente di configurare il primo azionamento“universale” in grado di assicurare prestazioni analoghe a quelledi un azionamento in c.a. o in c.c.
Le sezioni successive della presente guida si soffermano sullecaratteristiche e sui vantaggi della tecnologia DTC.
Azionamentiin c.a. -Controllodiretto dellacoppia
Figura 4: Anello di controllo di un azionamento in c.a. con latecnologia DTC
Evoluzione del Controllo Diretto della Coppia
Variabili dicontrollo
Controllo diretto della coppia
Controllodella
velocità
Controllodella
coppia

13Guida tecnica n.1 - Controllo Diretto della Coppia
Controllodi
velocità
Soffermiamoci ora sui seguenti diagrammi di controllo perevidenziare alcune differenze.
Confrontodegliazionamenti avelocitàvariabile
Evoluzione del Controllo Diretto della Coppia
Figura 1: Anello di controllo diun azionamento in c.c.
Figura 2: Anello di controlloin frequenza
Tabella 1: Confronto delle variabili di controllo
La prima osservazione da fare riguarda l'analogia tra lo schemadi controllo degli azionamenti in c.c. (Figura 1) e quello dellatecnologia DTC (Figura 4).
Entrambi utilizzano i parametri del motore per controllaredirettamente la coppia.
La tecnologia DTC presenta tuttavia maggiori vantaggi qualead esempio il fatto di non utilizzare un dispositivo di retroazione,oltre che tutti i vantaggi tipici dei motori in c.a. (vedere pagina8) e il fatto di non richiedere eccitazione esterna.
Azionamenti in c.c.Controllo
dicoppia
Controllo di frequenza
Rif. difrequenza
RapportoV/f
Modu-latore
Figura 3: Anello di controllovettoriale
Figura 4: Anello di controllodi un azionamento DTC
Controllodi
velocità
Controllodi
coppia
Controllo diretto della coppia DTCControllo vettoriale
Controllodi
velocità
Controllodi
coppia
Modu-latore
Azionamenti inc.a. (PWM)
Controllo direttodella coppia
Azionamenti in c.c.
AZIONAMENTO VARIABILI DI CONTROLLO
Corrente di indotto, I ACorrente di magnetizzazione, I M
Tensione di uscita, UFrequenza di uscita, f
Coppia motore, TFlusso di magnetizzazione,

Guida tecnica n.1 - Controllo Diretto della Coppia14
Evoluzione del Controllo Diretto della Coppia
Come si può vedere dalla Tabella 1, sia gli azionamenti in c.c.che gli azionamenti DTC utilizzano i parametri effettivi delmotore per controllare coppia e velocità. Di conseguenza, leprestazioni dinamiche sono rapide e ottimali. Con la tecnologiaDTC, inoltre, nella maggior parte delle applicazioni nonoccorrono una tachimetrica o un encoder per la retroazionedel segnale di velocità o di posizione.
Dal confronto della tecnologia DTC (Figura 4) con gli altri dueschemi di controllo degli azionamenti in c.a. (Figure 2 e 3) sievidenziano numerose differenze, la principale delle qualiriguarda il fatto che la tecnologia DTC non richiede unmodulatore.
Nel caso degli azionamenti in c.a. basati sulla tecnologia PWM,le variabili di controllo sono la frequenza e la tensione, chedevono passare attraverso diversi stadi prima di essereapplicate al motore. Nel caso degli azionamenti PWM, ilcontrollo viene dunque gestito all'interno del controlloreelettronico, e non all'interno del motore.
15Guida tecnica n.1 - Controllo Diretto della Coppia
Cos'è il controllo diretto della coppia?
Il controllo diretto della coppia (Direct Torque Contro, DTC) è la piùrecente tecnologia applicata agli azionamenti in c.a. sviluppatada ABB, destinata nel prossimo futuro a prendere il posto deitradizionali azionamenti PWM ad anello aperto e chiuso.
Perché è denominato "controllo diretto della coppia"?
Il termine "controllo diretto della coppia" si riferisce al fatto cheil controllo della coppia e della velocità si basano direttamentesullo stato elettromagnetico del motore, analogamente ai motoriin c.c., ma diversamente dalle modalità d'uso della frequenzad'ingresso e della tensione da parte dei tradizionali azionamentiPWM. DTC è la prima tecnologia che “realmente” controlla ledue variabili del motore "coppia" e "flusso".
Qual è il vantaggio di tutto ciò?
Poiché la coppia e il flusso sono i parametri del motore chevengono controllati direttamente, non è necessario utilizzareun modulatore, come nella tecnologia PWM, per controllare lafrequenza e la tensione. Questo, di fatto, contribuisce aeliminare molti problemi, e accelera la risposta dinamicadell'azionamento al variare della coppia. La tecnologia DTCinoltre garantisce un accurato controllo della coppia senza undispositivo di retroazione.
Perché occorre una nuova tecnologia per gliazionamenti in c.a.?
DTC non è semplicemente un'altra tecnologia per gli azionamentiin c.a. L'industria presenta esigenze sempre più complesse el'attuale tecnologia degli azionamenti in c.a. non è in grado disoddisfarle tutte.
Chi ha inventato la tecnologia DTC:
• Una migliore qualità del prodotto che può essere ottenutaanche con un migliore controllo della velocità e un più rapidocontrollo della coppia.
• Tempi di fermo ridotti, ovvero azionamenti che nonpresentino blocchi intempestivi, che non siano resi piùcomplessi da dispositivi di retroazione, e che risultino il piùpossibile immuni da interferenze quali armoniche e radiofrequenze.
• Riduzione del numero di prodotti. Un unico azionamento chesia in grado di soddisfare tutte le esigenze applicative,indipendentemente dal fatto che si tratti di azionamenit in c.a.,in c.c. o di servoazionamenti. Ecco cosa si intende con il termine"azionamento universale".
• Un ambiente di lavoro confortevole, con un azionamentoche generi il minor livello possibile di rumore percettibile.
Generalità
Capitolo 3 - Domande e Risposte

Guida tecnica n.1 - Controllo Diretto della Coppia16
Queste sono solo alcune delle esigenze espresse dall'industria.La tecnologia DTC può offrire soluzioni a tutte queste esigenze,oltre che apportare ulteriori vantaggi a molte applicazionistandard.
Chi ha inventato la tecnologia DTC?
ABB ha condotto attività di ricerca nel campo della tecnologiaDTC fin dal 1988 succesivamente alla pubblicazione della teoriaavvenuta nel 1971 e nel 1985 ad opera dell'ingegnere tedescoBlaschke e del collega Depenbrock. La tecnologia DTC si basasulla teoria del controllo orientato del campo delle macchine ainduzione e sulla teoria dell'autocontrollo diretto. ABB ha dedicatopiù di 100 anni-uomo allo sviluppo di questa tecnologia e allasua industrializzazione.
Quali sono i principali vantaggi della tecnologia DTC rispettoalla tradizionale tecnologia degli azionamenti in c.a.?
La tecnologia DTC offre numerosi vantaggi. L'aspetto più significativoriguarda il fatto che gli azionamenti basati sulla tecnologia DTCpresentano le seguenti eccezionali prestazioni dinamiche, per lo piùsenza necessità di un encoder o tachimetrica per tenere sotto controllola posizione o la velocità dell'albero:
• Risposta in coppia: - Con quale rapidità l'uscitadell'azionamento può raggiungere il valore specificato nelmomento in cui viene applicata una variazione del riferimentodi coppia nominale del 100%?Nel caso della tecnologia DTC, una tipica risposta in coppia vada 1 a 2 ms al di sotto di 40 Hz, rispetto ai 10-20 ms degliazionamenti in c.c. e vettoriali con encoder. Negli azionamentiPWM ad anello aperto (vedere pagina 9), il tempo di risposta èdi norma ben superiore a 100 ms. In effetti, con la sua rispostain coppia, la tecnologia DTC si è spinta fino al limite naturale. Afronte della tensione e della corrente disponibili, il tempo dirisposta non potrebbe essere inferiore. Anche negli azionamenti“senza sensori” di tipo più avanzato, la risposta in coppia è paria centinaia di millisecondi .
• Accurato controllo della coppia alle basse frequenze , unitamentealla coppia di carico massimo alla velocità zero, senza la necessitàdi un dispositivo di retroazione come un encoder o una tachimetrica.Con la tecnologia DTC, la velocità può essere controllata fino afrequenze inferiori a 0,5 Hz assicurando comunque il 100% dellacoppia fino alla velocità zero.
• Ripetibilità della coppia: - Con quale precisionel'azionamento ripete la coppia di uscita a fronte di uno stessosegnale di riferimento in coppia?La tecnologia DTC senza encoder può assicurare una ripetibilitàdell'1-2% della coppia nominale sull'intero campo di velocità. Questovalore è pari a circa la metà degli altri azionamenti in c.a. ad anelloaperto e uguale alla ripetibilità di un azionamento in c.a o in c.c. adanello chiuso.
Prestazioni
Domande e Risposte
17Guida tecnica n.1 - Controllo Diretto della Coppia
• Precisione statica in velocità: - Errore tra il riferimento divelocità e il valore effettivo in presenza di un carico costante.Nel caso della tecnologia DTC, la precisione in velocità è pari al10% dello scorrimento del motore. Con riferimento a un motore da11 kW, questo equivale a una precisione statica in velocità paria 0,3%. In un motore da 110 kW, la precisione in velocità è paria 0,1% senza encoder (anello aperto). Questa precisione soddisfai requisiti di precisione del 95% delle applicazioni industriali basatesull'impiego di azionamenti. Per ottenere lo stesso grado diprecisione con un azionamento in c.c. si rende invece necessariol'impiego di un encoder.
Per contro, negli azionamenti PWM con controllo della frequenza,la precisione statica in velocità è compresa tra 1 e 3%. L'uso diazionamenti standard basati sulla tecnologia DTC consentedunque di ottenere significativi miglioramenti nel processo delcliente.
Un azionamento DTC che utilizza un encoder da 1024 impulsi/giro può raggiungere una precisione in velocità dello 0,01%.
• Precisione dinamica in velocità: - Integrale della variazionedi velocità quando viene applicata la coppia (100%) nominale.La precisione dinamica in velocità della tecnologia DTC adanello aperto è compresa tra 0,3 e 0,4% secondi. Questovalore dipende dalla regolazione del guadagno del regolatore,che può essere tarato in funzione dei requisiti del processo.
Nel caso degli altri azionamenti in c.a. ad anello aperto, laprecisione dinamica è otto volte inferiore, attestandosi inpratica attorno a 3% secondi. Equipaggiando l'azionamentoDTC con un encoder, la precisione dinamica in velocità risultapari a 0,1% secondi, ovvero un valore prossimo alleprestazioni di un servoazionamento.
Quali sono i vantaggi pratici di queste prestazioni?
• Elevata risposta in coppia: - Questo riduce in modoconsiderevole le cadute di velocità durante i transitori delcarico, migliorando il controllo del processo e la qualità delprodotto.
• Controllo della coppia alle basse frequenze: - Questoaspetto è particolarmente importante per le gru e gli ascensori,dove il carico dev'essere avviato e fermato regolarmentesenza strappi. Anche per gli avvolgitori, la tensione può esserecontrollata da zero alla velocità massima. Rispetto agliazionamenti vettoriali PWM, la tecnologia DTC consente diridurre i costi poiché non necessità di tachimetrica.
• Linearità della coppia: - Questo aspetto è importante nelleapplicazioni di precisione quali gli avvolgitori utilizzati nelsettore delle cartiere, dove la precisione e la regolarità dellefunzioni di avvolgimento riveste un'importanza fondamentale.
Domande e Risposte

Guida tecnica n.1 - Controllo Diretto della Coppia18
• Precisione dinamica in velocità: - In caso di improvvisevariazioni del carico, il motore è in grado di tornare a uno statodi stabilità in tempi eccezionalmente rapidi.
Oltre alle eccellenti prestazioni dinamiche, quali sono glialtri vantaggi della tecnologia degli azionamenti DTC?
Vi sono numerosi altri vantaggi. Ad esempio, gli azionamentiDTC non necessitano di tachimetrica o encoder per teneresotto controllo la velocità o la posizione dell'albero del motoreper ottenere una rapidissima risposta in coppia anche da unazionamento in c.a. Questo consente di risparmiare sui costiiniziali.
Domande e Risposte
Tabella 2: Caratteristiche e vantaggi in termini di prestazionidinamiche offerte dalla tecnologia DTC
Risparmio sui costi diinvestimento. Maggioreaffidabilità. Migliorecontrollo del processo.Migliore qualità delprodotto. Verso unazionamento davvero"universale".
Prestazioni simili aquelle della tecnologiain c.c. ma senzatachimetrica. Ridottiguasti meccanici aimacchinari. Riduzionedei tempi di fermo edegli investimenti.
Azionamentoeconomico ad elevateprestazioni; assicura ilcontrollo di posizione euna migliore precisionestatica. Controllo diprecisione con motori inc.a. standard.
Riduzione dei costid'investimento. Migliorecontrollo sul carico.Possibilità di utilizzareun azionamento in c.a. eun motore al posto dellatecnologia in c.c.Utilizzare un motore inc.a. standard significaridurre i requisiti dimanutenzione e i costi.
Consente di controllare lavelocità con unaprecisione superiore allo0,5%. Nel 95% delleapplicazioni non occorreuna tachimetrica.
Azionamento perapplicazioni complesse.Assicura la coppianecessaria in ognimomento. Ripetibilitàdella coppia pari all'1%.Tempo di risposta incoppia inferiore a 5 ms.
Non occorre un frenomeccanico. Transizionedolce tra azionamento efreno. Consente di utilizzarel'azionamento nelleapplicazionitradizionalmente riservateagli azionamenti in c.c.
Prestazioni di livelloanalogo a quelle deiservoazionamenti.
Buona precisione invelocità senzatachimetrica
Eccezionale controllodella coppia senzatachimetrica.
Controllo fino allavelocità zero e controllodi posizione conencoder.
Coppia massima allavelocità zero con osenza tachimetrica/encoder.
CARATTERISTICA RISULTATO BENEFICIO

19Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
Tabella 3: Caratteristiche e benefici della tecnologia DTC
Rapido controllodella tensione sulcollegamento in c.c.
Autoalimentazione inmancanza di rete.
L'azionamento non vain blocco. Riduzione deitempi di fermo. Menointerruzioni nelprocesso = risparmio.
Avvio automatico(Riavviamentodiretto).
Avvio in presenzadell'induttanza residuadel motore. Nessunritardo all'avviamento.
Avvio con motore inmarcia senza attenderela riduzione del flusso.Trasferisce il moto dallalinea all'azionamento.Nessun riavviamento néinterruzioni delprocesso.
Frenatura controllatatra due velocità.
Costi di investimentoridotti. Migliorecontrollo del processo.Nessun ritardo comenella frenatura in c.c.Decelerazione avelocità diverse dazero. Ridotta necessitàdi chopper eresistenza di frenatura.
Flusso di frenatura.
Ottimizzazione delflusso.
Ridotte perdite erumorosità del motore.
Motore controllato almeglio.
Routine diidentificazione/Autotuning.
Sintonizza il motorecon l'azionamento perottimizzare leprestazioni.
Facile e accurata messaa punto. Non occorreregolare parametri.Tempo di avviamentoridotto. Coppia dispunto garantita. Facileretrofit per qualsiasisistema in c.a.
Senza schema dicommutazionepredeterminato deidispositivi dipotenza.
Bassa rumorosità.Nessuna portantefissa, quindirumorosità ridottagrazie allo spettro dirumore “bianco”.
Costi ridotti dellebarriere isolanti per leapplicazioni in cui ilrumore è importante.Sollecitazioni ridotte peringranaggi, pompe eventilatori.
Rapide accelerazioni edecelerazioni senzalimitazioni meccaniche.
Avviamentoautomatico(Riavviamento alvolo).
Sincronizzato con larotazione del motore.
Nessuna interruzionedel processo.Rallentamento dolcedelle macchine.Ripristina il controllo inogni situazione.
Nessun limite intermini di velocità diaccelerazione edecelerazione.
Migliore controllo delprocesso e migliorequalità del prodotto.
BENEFICIOCARATTERISTICA RISULTATO
Guida tecnica n.1 - Controllo Diretto della Coppia20
Inoltre, un azionamento DTC è caratterizzato da un rapido avvio,a prescindere dallo stato elettromagnetico e meccanico del motore.Il motore può essere avviato immediatamente, senza ritardo.
Sembra che gli azionamenti DTC siano i più vantaggiosiper le applicazioni più complesse o che richiedono alteprestazioni. Ma quali sono i vantaggi che la tecnologiaDTC apporta agli azionamenti standard?
Le applicazioni standard riguardano il 70% di tutti gliazionamenti a velocità variabile installati nell'industria. Due delleapplicazioni più diffuse sono quelle di ventilatori e pompe insettori quali il r iscaldamento, la ventilazione e ilcondizionamento aria (HVAC), il trattamento acque e il settorealimentare.
In queste applicazioni, la tecnologia DTC offre una validasoluzione a problemi quali le armoniche e la rumorosità.
Ad esempio, la tecnologia DTC può assicurare il controllo dellostato di generazione della linea di ingresso dell'azionamento,dove un ponte di tipo controllato può sostituire il ponte a diodidi tipo convenzionale.
Questo significa che con il ponte di ingresso controllato basatosulla tecnologia DTC si possono ridurre significativamente learmoniche. Il basso livello di distorsione di corrente checaratterizza il ponte controllato della tecnologia DTC è inferiorea quello delle configurazioni a 6 o 12 impulsi di tipoconvenzionale, a fronte di un fattore di potenza che può arrivarefino a 0.99.
Nelle applicazioni standard, gli azionamenti DTC sono in gradodi tollerare senza problemi il notevole e improvviso aumentodella coppia (carico) causato da rapidi cambiamenti nelprocesso, senza scattare per sovratensione o sovracorrente.
Inoltre, in caso di mancanza di tensione di breve durata,l'azionamento deve restare attivo. La tensione sul collegamentoin c.c. non deve diminuire al di sotto del livello minimo dicontrollo dell'80%. A questo scopo, la tecnologia DTC prevedeun ciclo di controllo di 25 microsecondi.
Qual è l'impatto della tecnologia DTC sul controllo dellepompe?
La tecnologia DTC presenta vantaggi nell'impiego con qualsiasitipo di pompa. Poiché consente di realizzare un azionamentodi tipo universale, con un'unica configurazione di azionamentosi possono controllare tutte le pompe, indipendentemente dallarispettiva tipologia (centrifuga o a coppia costante come lepompe a vite), così come areatori e convogliatori. La tecnologiaDTC consente l'autoregolazione dell'azionamento al variaredelle necessità dell'applicazione.
Domande e Risposte
21Guida tecnica n.1 - Controllo Diretto della Coppia
Ad esempio, nel caso delle pompe a vite, un azionamentobasato sulla tecnologia DTC è in grado di adattarsi per garantireuna coppia di spunto sufficiente per un avvio garantito.
L'autoalimentazione in mancanza di rete contribuisce aottimizzare la disponibilità delle funzioni di pompaggio in casodi mancanza dell'alimentazione di breve durata.
La funzionalità di controllo di coppia intrinseca nella tecnologiaDTC consente di limitare la coppia per evitare sollecitazionimeccaniche sulle pompe e sui condotti.
Qual è l'impatto della tecnologia DTC sul risparmioenergetico?
Una caratteristica della tecnologia DTC che contribuisce aottimizzare il rendimento energetico è la cosiddettaottimizzazione del flusso del motore.
Grazie a questa funzionalità, il rendimento dell'azionamentoglobale (cioè il controllore e il motore) risulta notevolmenteottimizzato nelle applicazioni con ventilatori e pompe.
Ad esempio, a fronte di un carico del 25% si ottiene un'ottimizzazionedel rendimento energetico globale fino al 10%. In presenza di uncarico del 50%, il miglioramento globlale in termini di rendimento puòinvece essere pari al 2%.
E questo influisce direttamente sui costi d'esercizio. Questacaratteristica inoltre contribuisce a ridurre notevolmente la rumorositàdel motore rispetto a quella degli azionamenti PWM tradizionali basatisulla frequenza di commutazione.
La tecnologia DTC è già stata utilizzata in molti impianti?
Sì, in centinaia di migliaia di impianti. Per esempio, uno dei piùgrandi costruttori di bobinatrici ha provato la tecnologia DTC perun avvolgitore in un processo di finissaggio pellicola.
I requisiti:Esatto controllo della coppia nell'avvolgitore al fine di ottenerefilm di qualità più elevata.
La soluzione:Azionamenti DTC ad anello aperto al posto degli azionamenti inc.c. di tipo tradizionale e successivamente in sostituzione diun azionamento vettoriale in c.a. nella stazione del riavvolgitore.
Domande e Risposte
Guida tecnica n.1 - Controllo Diretto della Coppia22
I benefici:Costruzione semplificata della stazione del riavvolgitore e maggioreaffidabilità. Il costo di una tachimetrica montata e del relativo cablaggioè equivalente al costo di un motore in c.a. da 30 kW. Questo significaminori costi di investimento.
Qual è la differenza tra la tecnologia DTC e i metodiPWM tradizionali?
• PWM con controllo di frequenza e PWM vettoriale
Negli azionamenti PWM tradizionali, la tensione e la frequenza diuscita vengono usate come principali variabili di controllo, ma questedevono essere modulate con impulsi in ampiezza prima di essereapplicate al motore.
Questo stadio di modulazione contribuisce ad accrescere il tempodi elaborazione del segnale limitando di conseguenza il livellodella coppia e la risposta in velocità dell'azionamento PWM.
Generalmente, un modulatore PWM richiede un tempo 10 voltesupeiore rispetto alla tecnologia DTC per adeguarsi al nuovo valoreeffettivo.
• Controllo DTC
La tecnologia DTC consente di utilizzare la coppia e il flussostatorico del motore come principali variabili di controllo - edentrambe sono ottenute direttamente dal motore. Pertanto, conla tecnologia DTC non vi è necessità di un modulatore PWMseparato, controllato in frequenza e in tensione. Un altro notevolevantaggio degli azionamenti DTC sta nel fatto che per il 95% ditutte le applicazioni non risulta necessario un dispositivo diretroazione.
Perché la tecnologia DTC non richiede una tachimetrica oun encoder per indicare con precisione la posizionedell'albero del motore?
La risposta a questa domanda va cercata in quattro principalimotivi:
• La precisione del modello del motore (vedere pagina 27).• Le variabili di controllo vengono acquisite direttamente dal
motore (vedere pagina 27).• La rapidità di elaborazione dell'hardware del selettore degli
impulsi ottimali e DSP (vedere pagina 28).• Non occorre un modulatore (vedere pagina 12).
Funzionamento
Domande e Risposte

23Guida tecnica n.1 - Controllo Diretto della Coppia
In un azionamento DTC, le caratteristiche sopra illustrateconsentono di configurare un azionamento in grado di calcolarele tensioni di commutazione ottimali 40.000 volte al secondo.Si tratta quindi di una rapidità sufficiente per controllare i singoliimpulsi di commutazione. In altre parole, si trattadell'azionamento più veloce mai realizzato.
Con cicli che si ripetono ogni 25 microsecondi, viene trasmessaal semiconduttore dell'inverter una sequenza di commutazioneottimale per produrre la coppia richiesta. Questa velocità diaggiornamento è notevolmente inferiore a qualsiasi costantedi tempo nel motore. Di conseguenza, è il motore che diventaora il componente limite, e non l'inverter.
Qual è la differenza tra la tecnologia DTC e gli altriazionamenti sensorless disponibili sul mercato?
Tra la tecnologia DTC e molti degli azionamenti sensorless sulmercato vi sono notevoli differenze. Quella principale riguardatuttavia la capacità della tecnologia DTC di assicurare uncontrollo accurato anche alle basse velocità, fino alla velocitàzero, senza retroazione da encoder. Alle basse frequenze,l'aumento della coppia nominale può avvenire in meno di 1 ms,una caratteristica senza precedenti.
Come è possibile, per la tecnologia DTC, assicurare unlivello di prestazioni tipico dei servoazionamenti?
Questo è dovuto al fatto che ora è il motore a trasformarsi nelfattore limite delle prestazioni, e non il convertitore. La precisionedinamica tipica di un servoazionamento è pari a 0,1%s. Latecnologia DTC può raggiungere questa precisione dinamicatramite retroazione di velocità da una tachimetrica opzionale.
Come è possibile, per la tecnologia DTC, assicurare questimiglioramenti rispetto alla tecnologia tradizionale?
La differenza più sorprendente è data dall'ampia gamma divelocità in cui può operare la tecnologia DTC. Come giàmenzionato, la risposta in coppia è la più rapida disponibile.
Per ottenere un veloce anello in coppia, ABB ha utilizzato la piùrecente tecnologia di elaborazione dei segnali ad alta velocità e hadedicato 100 anni-uomo allo sviluppo del più avanzato modello dimotore che simula con precisione i parametri effettivi del motorenel controllore.
Per comprendere meglio i principi teorici del controllo DTC, vederela pagina 26.
Domande e Risposte
Guida tecnica n.1 - Controllo Diretto della Coppia24
La tecnologia DTC utilizza la logica fuzzy nel suo anellodi controllo?
No. La logica fuzzy viene utilizzata da alcuni azionamenti permantenere la corrente di accelerazione entro i limiti di correntee quindi prevenire il blocco non necessario dell'azionamento.Poiché la tecnologia DTC controlla la coppia direttamente, lacorrente può essere mantenuta entro i limiti in qualsiasicondizione operativa.
Si dice che gli azionamenti che utilizzano la tecnologiaDTC siano esenti da scatti intempestivi. Come si ottienequesto risultato?
Molti costruttori hanno dedicato anni di ricerca e sviluppo alproblema degli scatti intempestivi durante l'accelerazione e ladecelerazione, trovando la questione molto ardua da risolvere.La tecnologia DTC riesce in questo intento controllando la coppiaeffettiva del motore.
La velocità e la precisione dell'azionamento che fannoaffidamento su parametri di controllo calcolati piuttosto chemisurati non potranno mai essere realistiche. Senzaguardare l'albero, non si può avere un quadro reale dellasituazione. E' vero questo nel caso della tecnologia DTC?
La tecnologia DTC fotografa l'intera situazione. Come spiegatoin precedenza, grazie alla sofisticazione del modello di motoree alla capacità di eseguire 40.000 operazioni matematiche alsecondo, la tecnologia DTC conosce precisamente l'esattacondizione dell'albero motore. Non esiste alcun dubbio circa lostato del motore. E questo si riflette nelle eccezionalicaratteristiche di risposta in coppia e di precisione in velocitàillustrate alle pagine 16-17.
Diversamente dagli azionamenti in c.a. di tipo tradizionale, doveil 30% di tutte le commutazioni vanno perse, un azionamentobasato sulla tecnologia DTC sa esattamente dove si troval'albero, e non spreca quindi alcuna commutazione.
La tecnologia DTC è in grado di coprire il 95% di tutte le applicazioniindustriali. Alle eccezioni, per lo più applicazioni che richiedono uncontrollo di velocità estremamente preciso, si può far fronteaggiungendo un dispositivo di retroazione per assicurare il controlload anello chiuso. Si tratta comunque di un dispositivo che può esserepiù semplice dei sensori che si rendono necessari con gliazionamenti ad anello chiuso di tipo convenzionale.
Domande e Risposte
25Guida tecnica n.1 - Controllo Diretto della Coppia
Anche i semiconduttori più rapidi introducono dei tempimorti. Qual è quindi la precisione di autotuning di unazionamento DTC?
L'autotuning viene utilizzato nella routine di identificazione inizialedegli azionamenti DTC (vedere pagina 27). I tempi morti vengonomisurati e quindi considerati dal modello di motore ai fini delcalcolo del flusso effettivo. In un azionamento PWM, invece, ilproblema si colloca nella gamma 20-30 Hz, dove si generaondulazione di coppia.
Qual è la stabilità assicurata da un azionamento DTC inpresenza di carichi lievi e basse velocità?
Gli azionamenti DTC sono caratterizzati da una buona stabilitàfino alla velocità zero e dalla capacità di assicurare una buonaprecisione in coppia e in velocità alle basse velocità e in presenzadi carichi leggeri. Abbiamo definito il grado di precisione comesegue:
Precisione in coppia: In un campo di velocità tra il 2 e il 100%e in un campo di carico tra il 10 e il 100%, la precisione dicoppia è del 2%.
Precisione in velocità: In un campo di velocità tra il 2 e il100% e in un campo di carico tra il 10 e il 100%, la precisione divelocità è pari al 10% dello scorrimento del motore. Loscorrimento del motore nel caso di un motore da 37 kW è dicirca il 2%, il che significa una precisione in velocità dello 0,2%.
Quali sono i limiti della tecnologia DTC?
Se si collegano in parallelo più motori con un inverter controllato conla tecnologia DTC, la configurazione che si ottiene corrisponde aquella di un unico grande motore. Non sono quindi disponibiliinformazioni sullo stato di ogni singolo motore. Se il numero di motorivaria o se la potenza del motore resta al di sotto di 1/8 della potenzanominale, è meglio scegliere la macro di controllo scalare.
La tecnologia DTC può essere utilizzata con qualsiasi tipodi motore a induzione?
Sì, con qualsiasi tipo di motore asincrono a gabbia di scoiattolo.
Domande e Risposte

Guida tecnica n.1 - Controllo Diretto della Coppia26
La figura 5 mostra lo schema a blocchi della tecnologia DTC.
Diagramma a blocchi
La schema a blocchi mostra che la tecnologia DTC presentadue sezioni fondamentali: l'anello di controllo della velocità el'anello di controllo della coppia. Prenderemo ora in considerazioneogni blocco illustrando come si integrano tra loro.
Cominciamo dall'anello di controllo della coppia.
Come funzionala tecnologiaDTC
Figura 5: DTC comprende due blocchi chiave: Controllo della velocità eControllo della Coppia
Capitolo 4 - Principi teorici alla base del controllo
Riferimento diflusso interno
ANELLO DICONTROLLO
DELLA COPPIA
Rete
Riferimento di coppia interno
Coppia effettiva
Flusso effettivo
Comparatore dicoppia
Comparatore diflusso
Selettoreimpulsoottimale
Modello adattivodi motore
Bus in c.c.
Raddrizzatore
Comandiposizioni dicommutazione
Stato dellacoppiaSegnali dicontrolloStato delflusso
Tensione bus in c.c.
Corrente motoreCorrente motore
Trifase
ANELLO DICONTROLLO DELLA
VELOCITA'
Riferimento di coppia
Riferimentodi velocità
Controlloredi velocità
+ compensatoredi accelerazione
Ottimizzazione del flusso
Velocità effettiva
Flusso di frenatura
Controlloreriferimento di coppia
Controlloreriferimento di flusso
Inverter
Posizione di commutazione
27Guida tecnica n.1 - Controllo Diretto della Coppia
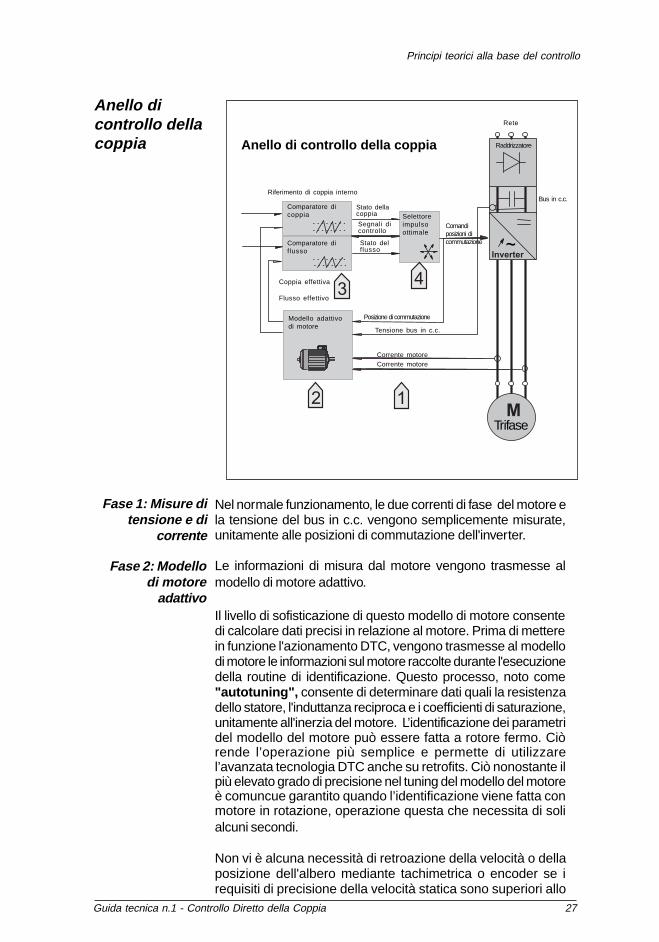
Nel normale funzionamento, le due correnti di fase del motore ela tensione del bus in c.c. vengono semplicemente misurate,unitamente alle posizioni di commutazione dell'inverter.
Le informazioni di misura dal motore vengono trasmesse almodello di motore adattivo.
Il livello di sofisticazione di questo modello di motore consentedi calcolare dati precisi in relazione al motore. Prima di metterein funzione l'azionamento DTC, vengono trasmesse al modellodi motore le informazioni sul motore raccolte durante l'esecuzionedella routine di identificazione. Questo processo, noto come"autotuning", consente di determinare dati quali la resistenzadello statore, l'induttanza reciproca e i coefficienti di saturazione,unitamente all'inerzia del motore. L’identificazione dei parametridel modello del motore può essere fatta a rotore fermo. Ciòrende l’operazione più semplice e permette di utilizzarel’avanzata tecnologia DTC anche su retrofits. Ciò nonostante ilpiù elevato grado di precisione nel tuning del modello del motoreè comuncue garantito quando l’identificazione viene fatta conmotore in rotazione, operazione questa che necessita di solialcuni secondi.
Non vi è alcuna necessità di retroazione della velocità o dellaposizione dell'albero mediante tachimetrica o encoder se irequisiti di precisione della velocità statica sono superiori allo
Anello dicontrollo dellacoppia
Fase 1: Misure ditensione e di
corrente
Fase 2: Modellodi motore
adattivo
Principi teorici alla base del controllo
Rete
Riferimento di coppia interno
Coppia effettiva
Flusso effettivo
Comparatore dicoppia
Comparatore diflusso
Selettoreimpulsoottimale
Modello adattivodi motore
Bus in c.c.
Raddrizzatore
Comandiposizioni dicommutazione
Stato dellacoppia
Segnali dicontrollo
Stato delflusso
Tensione bus in c.c.
Corrente motore
Trifase
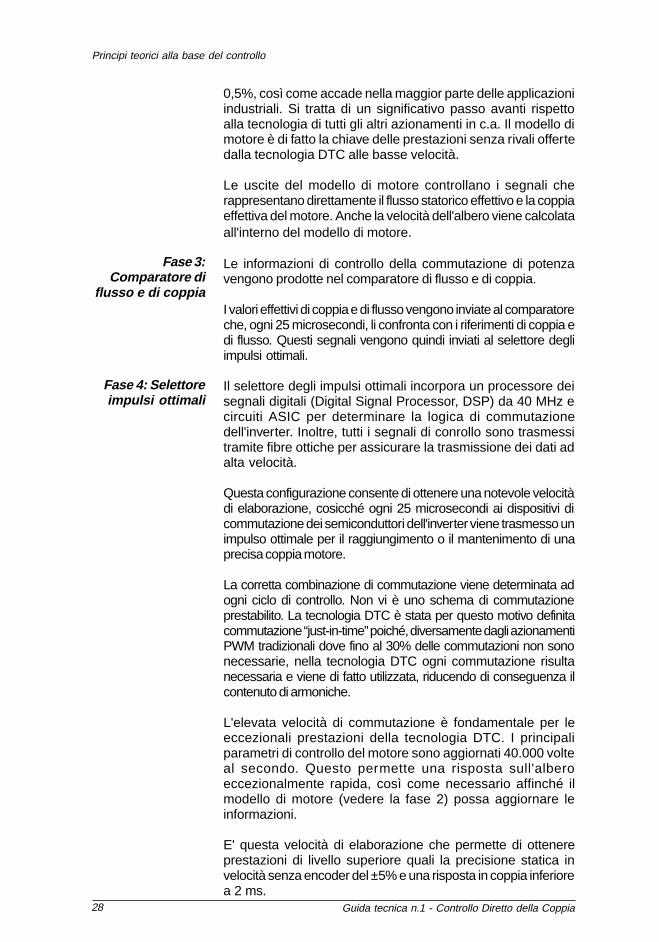
Anello di controllo della coppia
Corrente motore
Posizione di commutazione
Guida tecnica n.1 - Controllo Diretto della Coppia28
0,5%, così come accade nella maggior parte delle applicazioniindustriali. Si tratta di un significativo passo avanti rispettoalla tecnologia di tutti gli altri azionamenti in c.a. Il modello dimotore è di fatto la chiave delle prestazioni senza rivali offertedalla tecnologia DTC alle basse velocità.
Le uscite del modello di motore controllano i segnali cherappresentano direttamente il flusso statorico effettivo e la coppiaeffettiva del motore. Anche la velocità dell'albero viene calcolataall'interno del modello di motore.
Le informazioni di controllo della commutazione di potenzavengono prodotte nel comparatore di flusso e di coppia.
I valori effettivi di coppia e di flusso vengono inviate al comparatoreche, ogni 25 microsecondi, li confronta con i riferimenti di coppia edi flusso. Questi segnali vengono quindi inviati al selettore degliimpulsi ottimali.
Il selettore degli impulsi ottimali incorpora un processore deisegnali digitali (Digital Signal Processor, DSP) da 40 MHz ecircuiti ASIC per determinare la logica di commutazionedell'inverter. Inoltre, tutti i segnali di conrollo sono trasmessitramite fibre ottiche per assicurare la trasmissione dei dati adalta velocità.
Questa configurazione consente di ottenere una notevole velocitàdi elaborazione, cosicché ogni 25 microsecondi ai dispositivi dicommutazione dei semiconduttori dell'inverter viene trasmesso unimpulso ottimale per il raggiungimento o il mantenimento di unaprecisa coppia motore.
La corretta combinazione di commutazione viene determinata adogni ciclo di controllo. Non vi è uno schema di commutazioneprestabilito. La tecnologia DTC è stata per questo motivo definitacommutazione “just-in-time” poiché, diversamente dagli azionamentiPWM tradizionali dove fino al 30% delle commutazioni non sononecessarie, nella tecnologia DTC ogni commutazione risultanecessaria e viene di fatto utilizzata, riducendo di conseguenza ilcontenuto di armoniche.
L'elevata velocità di commutazione è fondamentale per leeccezionali prestazioni della tecnologia DTC. I principaliparametri di controllo del motore sono aggiornati 40.000 volteal secondo. Questo permette una risposta sull'alberoeccezionalmente rapida, così come necessario affinché ilmodello di motore (vedere la fase 2) possa aggiornare leinformazioni.
E' questa velocità di elaborazione che permette di ottenereprestazioni di livello superiore quali la precisione statica invelocità senza encoder del ±5% e una risposta in coppia inferiorea 2 ms.
Fase 4: Selettoreimpulsi ottimali
Fase 3:Comparatore di
flusso e di coppia
Principi teorici alla base del controllo
29Guida tecnica n.1 - Controllo Diretto della Coppia
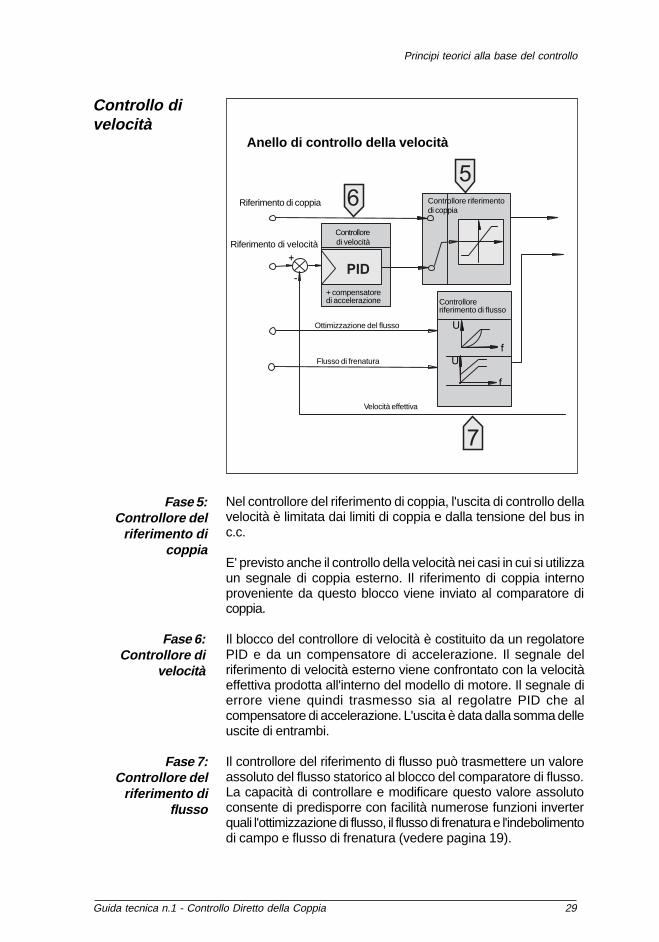
Nel controllore del riferimento di coppia, l'uscita di controllo dellavelocità è limitata dai limiti di coppia e dalla tensione del bus inc.c.
E' previsto anche il controllo della velocità nei casi in cui si utilizzaun segnale di coppia esterno. Il riferimento di coppia internoproveniente da questo blocco viene inviato al comparatore dicoppia.
Il blocco del controllore di velocità è costituito da un regolatorePID e da un compensatore di accelerazione. Il segnale delriferimento di velocità esterno viene confrontato con la velocitàeffettiva prodotta all'interno del modello di motore. Il segnale dierrore viene quindi trasmesso sia al regolatre PID che alcompensatore di accelerazione. L'uscita è data dalla somma delleuscite di entrambi.
Il controllore del riferimento di flusso può trasmettere un valoreassoluto del flusso statorico al blocco del comparatore di flusso.La capacità di controllare e modificare questo valore assolutoconsente di predisporre con facilità numerose funzioni inverterquali l'ottimizzazione di flusso, il flusso di frenatura e l'indebolimentodi campo e flusso di frenatura (vedere pagina 19).
Controllo divelocità
Fase 5:Controllore del
riferimento dicoppia
Fase 6:Controllore di
velocità
Principi teorici alla base del controllo
Fase 7:Controllore del
riferimento diflusso
Anello di controllo della velocità
Riferimento di coppia
Riferimento di velocitàControlloredi velocità
+ compensatoredi accelerazione
Velocità effettiva
Controllore riferimentodi coppia
Controlloreriferimento di flusso
Ottimizzazione del flusso
Flusso di frenatura

Guida tecnica n.1 - Controllo Diretto della Coppia30
Capitolo 5 - Indice alfabetico
Aacqua 5, 20aeratori 20affidabilità 8, 18anello chiuso 10, 11, 15, 16anello di controllo 7, 9, 10, 12, 13,24, 26, 27, 29Anello di controllo della coppia 26Anello di controllo velocità 26armoniche 15, 20ascensori 17ASIC 28assistenza 8aumento di coppia nominale 23autoalimentazione in mancanza direte 19, 21auto-tuning 19, 25, 27avviamento 19, 20avvio 5, 19, 20, 26avvolgimenti di indotto 7avvolgimento statorico 9, 10avvolgitore 17, 21, 22azionamenti a velocità variabile 5,6, 13, 20azionamenti ad anello aperto 9azionamenti ad anello chiuso 10, 11azionamenti in c.a. ad anello aperto 12azionamenti PWM vettoriali 11azionamento a velocità variabile inc.a. 6, 8azionamento alimentato in tensione 8azionamento in c.a. 5, 6, 8, 9, 10,12, 13, 14, 15, 16, 17, 18, 21, 24, 27azionamento in c.a. basato sulla tec-nologia DTC 12, 13azionamento in c.a. con controllo difrequenza 9azionamento in c.a. con controllovettoriale 10azionamento in c.a. PWM 11, 14,21, 22, 24, 28azionamento in c.c. 7, 8, 9, 10, 11,12, 13, 14, 18Azionamento per motori in c.c. 6Bbasse frequenze 16, 17, 23Blaschke 16bobinatrice 21Ccampo statorico 11ciclo di controllo 28coefficiente di saturazione 27collegamenti a fibre ottiche 28Comparatore di coppia 28, 29comparatore di flusso 28, 29compensatore di accelerazione 29complesso commutatore-spazzole 7
condizionamento aria 5, 20controllo della precisione 18controllo dell’isteresi 28controllo di frequenza 6, 9, 13, 22controllo di posizione 18controllo di velocità 6, 7, 24, 26,28, 29Controllo diretto della coppia 5, 6,7, 8, 9, 10, 11, 12, 13, 14, 15, 26controllo orientamento dicampo 16controllo scalare 10, 25controllo vettoriale 6, 10, 11, 13Controllore del riferimento di coppia 29Controllore del riferimento di flusso 29controllore elettronico 11, 14coppia 5, 6, 7, 8, 9, 10, 11, 12, 13,14, 15, 16, 17, 18, 19, 20, 21, 22,23, 24, 25, 26, 28, 29- anello 23- carico massimo alla velocità zero16- controllo 5, 6, 7, 8, 10, 12, 18, 21,26- controllo alle basse frequenze 16- linearità 17- ondulazione 24- ripetibilità 18- risposta 6, 8, 11, 12, 18, 23, 24,28coppia di carico 16, 20coppia dle motore 8, 12, 28Coppia e flusso 28corrente di campo 7corrente di indotto 7corrente di magnetizzazione 7costante di tempo elettrica 8costante di tempo 8, 23costi 8, 10, 11, 18, 19, 21costi di esercizio 21costi iniziali 18DDepenbrock 16dispositivo di retroazione 9, 10, 11,13, 15, 16, 22, 24DSP 22, 28DTC 5, 6, 12, 13, 14, 15, 16, 17,18, 19, 20, 21, 22, 23, 24, 25, 26,27, 28Eelaborazione dei segnali 12, 22, 23elaborazione dei segnali digitali 12encoder 12, 22encoder 8, 11, 12, 14, 18, 22, 23,27, 28Ffattore di potenza 20

31Guida tecnica n.1 - Controllo Diretto della Coppia
resistenza statorica 27retroazione di posizione 8retrofit 19RFI 15riavvio 19riferimento di velocità esterno 29riscaldamento 20risparmio energetico 21risposta dinamica in velocità 8risposta in velocità 7, 8, 22rotore 7, 8, 10, 11rumorosità 15, 19, 20, 21rumorosità del motore 19, 21Sscatto 15, 19, 20, 24schema di commutazione 19, 23,28schema di commutazioneprestabilito 19, 28segnale di coppia esterno 29Selettore impulsi ottimali 28senza sensori 23servoazionamento 18, 23sollecitazione 19, 21stabilità 25statore 7, 9, 10, 11, 22, 27, 28, 29Ttachimetrica 12, 14, 16, 17, 18, 22,23, 27tempo di elaborazione deisegnali 22tensione 8, 9, 10, 11, 14, 15, 16,19, 20, 22, 23, 27, 29tensione bus in c.c. 27, 29tensione del collegamento in c.c. 19,20tensione di uscita 22trasportatori 20tubazioni 21Uunità di generazione linea ingressoazionamento 20universale 12, 15, 18, 20uscita di controllo velocità 29Vvariabili di controllo 10, 13, 15, 22variabili di controllo 9, 11, 12, 14, 22velocità 5, 6, 7, 8, 9, 10, 11, 12, 13,14, 15, 16, 17, 18, 19, 20, 22, 23, 24,25, 26, 27, 28, 29velocità rotorica 11velocità statica del motore 17velocità zero 11, 16, 18, 19, 23, 25ventilatori 10, 19, 20, 21ventilazione 20vettore di flusso 6, 10, 11, 13, 16,21, 22VSD 5, 6
finissaggio pellicola 21flusso di frenatura 19, 29flusso di magnetizzazione delmotore 12flusso rotorico 11flusso statorico 22, 28, 29frenatura 19, 29freno meccanico 18frequenza di ingresso 15frequenza di uscita 22HHVAC 20Iimpulsi di commutazione 23industria alimentare 20industria delle cartiere 17induttanza reciproca 27inerzia 27ingranaggi 19Llogica fuzzy 24Mmanutenzione 6, 8, 18messa in servizio 19Modello di motore 10, 22, 23, 24,27, 28, 29modulatore 9, 10, 11, 12, 14, 22motore a induzione in c.a. 10, 11motore in c.a. 5, 6, 8, 13, 18motore in c.c. 6, 7, 8, 11, 15OOEM 5orientamento del campo 7, 8, 10,11, 12ottimizzazione del flusso delmotore 21ottimizzazione di flusso 19, 21, 29Pperdite in ingresso 20pompa 10, 19, 20, 21ponte a diodi 20ponte di ingresso controllato 20posizione angolare 11posizione rotore 7precisione dinamica in velocità 12,17, 18, 23precisione in velocità 6, 8, 11, 12,15, 17, 18, 23, 24, 25, 27precisione statica 18precisione velocità statica 17, 27Pulse Width Modulation (modulazio-ne ampiezza impulsi, PWM) 9PWM 6, 9, 10, 11, 14, 15, 16, 17,21, 22, 24, 28Rraddrizzatore a diodi 9Regolatore di velocità 29regolatore motore 8regolatore PID 29

ABB Industria S.p.A.Viale Edison 5020099 Sesto S. Giovanni (Mi)Tel: 02 - 26 23 27 32Fax: 02 - 26 23 29 79Internet: http://www.abb.it
3BFE
642
3270
3 R
O10
4IT
30.
7.19
99
ETICHETTAEC
OLO
GIC
A
NORDICA
441
0
14S
tam
pato