controller - electrical and computer engineering · sensor data actuation communication conclusion....
TRANSCRIPT

CONTROLLER

AGENDA• Hyperloop
• Competition
• Team
• Printed Circuit Board
• Sensor Data
• Actuation
• Communication
• Conclusion
• Questions
2
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

INTRODUCTION• Celeste Bean
• Connor Buckland
• Ben Hartl
• Cameron McCarthy
• Connor Mulcahey
3
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

HYPERLOOP• Cities < 700 miles apart
• Max speed of 760 mph
4
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

HYPERLOOP• Depressurized steel tube
• Magnetic levitation
5
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

COMPETITION• Organized by Elon Musk and SpaceX
• Design and build a proof of concept pod
• Compete in Summer 2016 on 1-mile long track
6
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

COMPETITION
7
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

DESIGN WEEKEND• 1200 original applicants
• 1 of 120 teams invited to Design Weekend at Texas A&M
8
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

DESIGN WEEKEND• 1 of 30 teams admitted to the final stage of the competition
• Few teams with a Computer Engineering Team
9
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

UCSB TEAM
10
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

UCSB TEAM• 23 undergraduate students
• Computer Engineering
• Computer Science
• Mechanical Engineering
• Electrical Engineering
• Physics
• Economics
11
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

UCSB TEAM• $50,000 budget raised from donors, crowd funding, and UCSB
12
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

UCSB TEAM• Length: 14’ (4.3m); Width: 3’5” (1.0m); Height: 3’4” (1.0m)
13
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

PRINTED CIRCUIT BOARD
14
• 8.1” x 8.1” printed circuit board
• (2) ARM Cortex-M4
microcontrollers
• 430 components
• Designed for flexibility
• Sensor Data
• Telemetry & communication
• Actuation
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

SENSOR DATA
15
• Must report:
• 3D position, velocity, and acceleration
• Roll, pitch, and yaw
• Temperature
• Pressure
• Power consumption
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

NAVIGATION SYSTEM
16
• Find position, velocity, and acceleration
• The tube has reflective strips every 100’
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

NAVIGATION SYSTEM
17
• Photoelectric sensor detects strips
• 2 inertial accelerometer determine position between strips
• Velocity compared to hard-coded profile for safety
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion
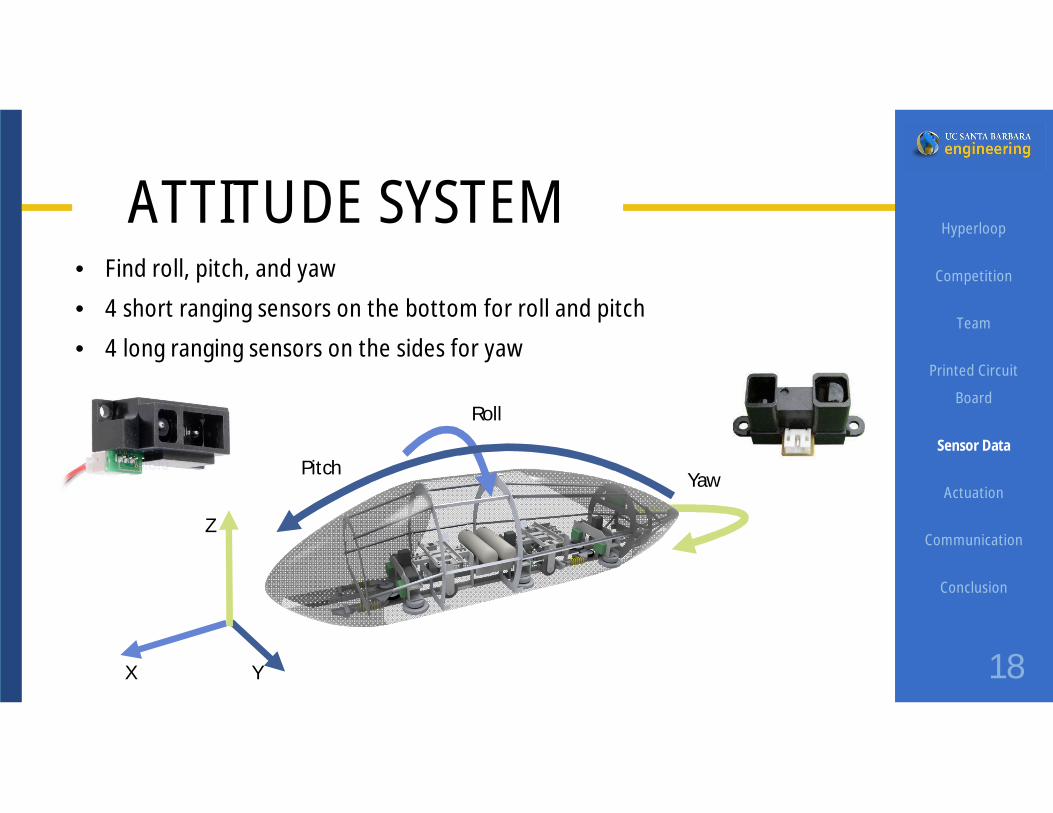
ATTITUDE SYSTEM
18
• Find roll, pitch, and yaw
• 4 short ranging sensors on the bottom for roll and pitch
• 4 long ranging sensors on the sides for yaw
X Y
Z
Pitch
Roll
Yaw
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

SENSOR LOCATIONS
19
• Photoelectric sensors (2) – navigation• Long ranging sensors (4) – data acquisition• Short ranging sensors (4) – stability• System Circuit Board
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion
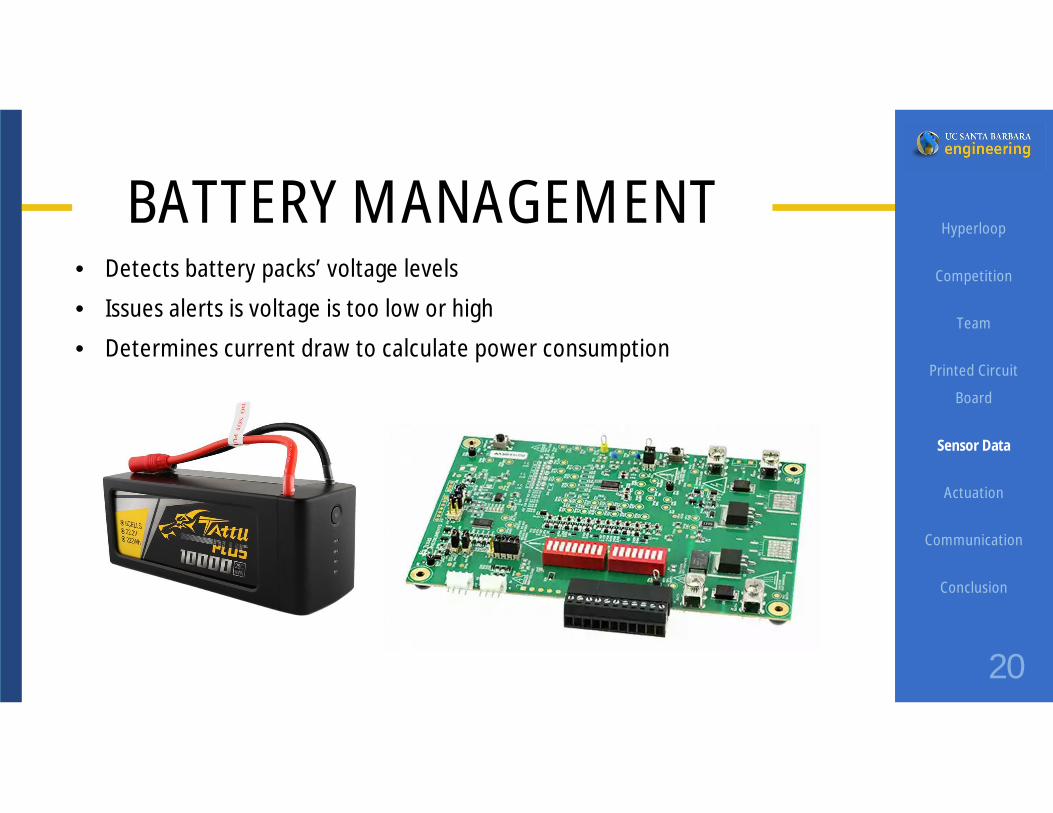
BATTERY MANAGEMENT
20
• Detects battery packs’ voltage levels
• Issues alerts is voltage is too low or high
• Determines current draw to calculate power consumption
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

MAGNETIC LEVITATION
21
• Controls 6 Arx Pax H3.0 magnetic levitation engines
• Interface with motors via ASi BAC motor controller
• Programmable via ASi BACDoor software
• Motor speed controlled using analog 0 – 5 V signal
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

TRANSIT ACTUATION
22
• Raises and lowers the pod to various heights to levitate or rest upon wheels
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

TRANSIT ACTUATION
23
• Motor activates service propulsion wheel to move pod through tube
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion
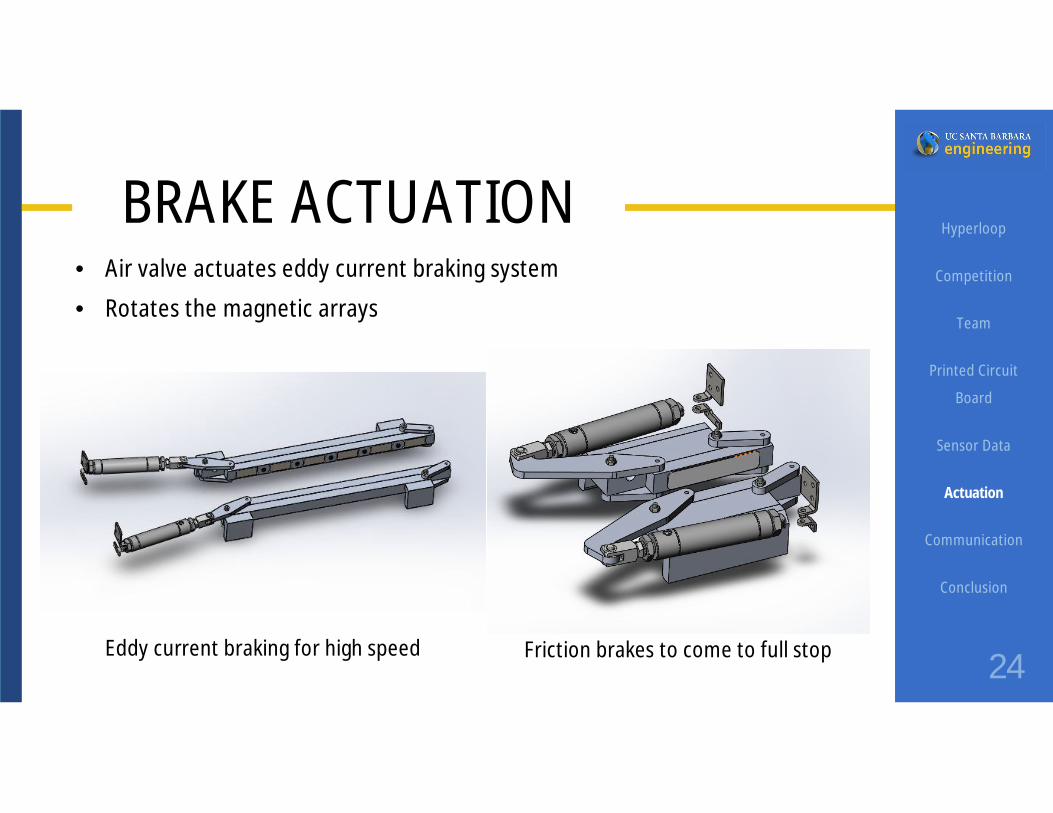
BRAKE ACTUATION
24
• Air valve actuates eddy current braking system
• Rotates the magnetic arrays
Eddy current braking for high speed Friction brakes to come to full stop
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

BRAKE ACTUATION
25
• Air valve actuates secondary friction brakes
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

EMERGENCY PROTOCOL
26
• Emergency state activated by:
• Emergency pod stop command
• Large deviations in velocity profile
• Protocol
• Engage eddy current brakes
• Engage frictional brakes at lower speeds
• Disengage brakes once pod stop completed
• Disengage magnetic levitation engines
• Use linear actuator to activate service propulsion wheels
• Engage service propulsion motor until tube exit completed
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion
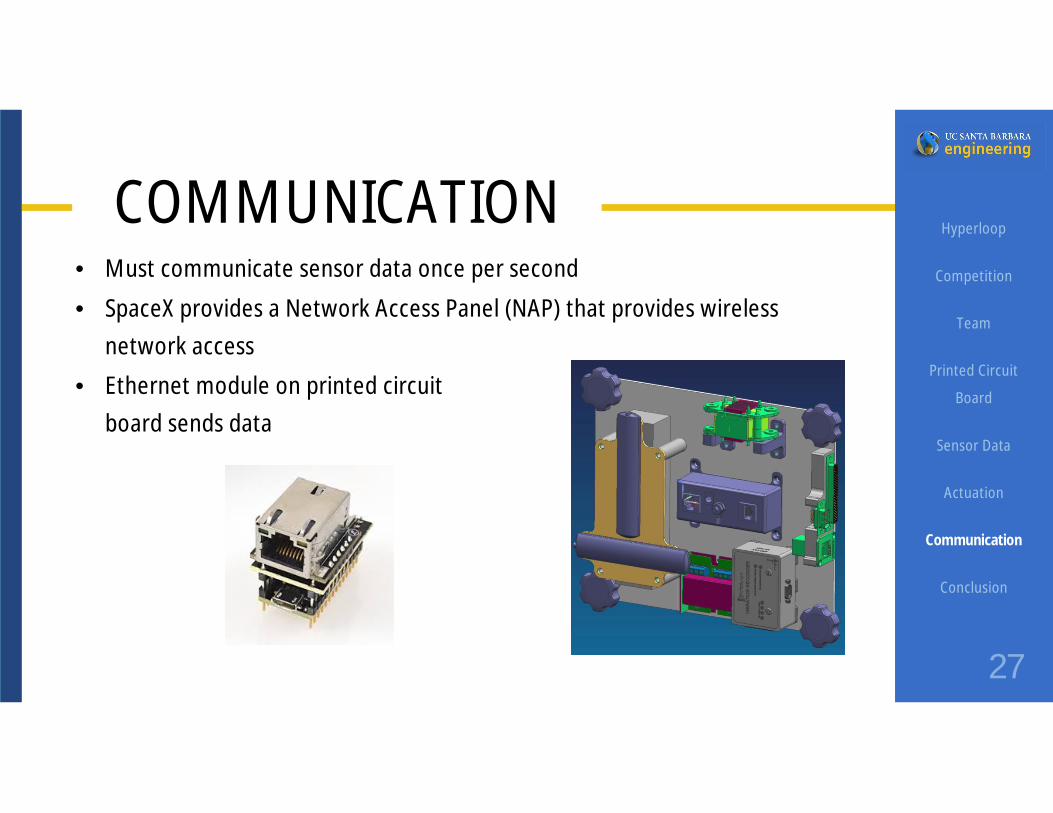
COMMUNICATION
27
• Must communicate sensor data once per second
• SpaceX provides a Network Access Panel (NAP) that provides wireless
network access
• Ethernet module on printed circuit
board sends data
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

NETWORKING APPLICATION
28
• Developed secure
application level
protocol
• Displays and logs
sensor data
• Sends control
messages
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

CODE ARCHITECTURE
29
• Managed a git repository for version control
• Ensures that code remains clean
• Avoids merge conflicts
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion

CONCLUSION
30
• Thank you to Dr. John Johnson and Will Miller
• Thank you to Elon Musk and SpaceX
• Thank you to our generous sponsors
Jonathan Siegel Tilt Contributors
Hyperloop
Competition
Team
Printed Circuit
Board
Sensor Data
Actuation
Communication
Conclusion