contribution aux modèles des perturbations
TRANSCRIPT
HAL Id: tel-01629435https://tel.archives-ouvertes.fr/tel-01629435
Submitted on 6 Nov 2017
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Contribution aux modèles des perturbationsélectromagnétiques émises par les convertisseurs de
l’électronique de puissanceJad Taki
To cite this version:Jad Taki. Contribution aux modèles des perturbations électromagnétiques émises par les convertisseursde l’électronique de puissance. Autre. Université Paris Saclay (COmUE), 2017. Français. NNT :2017SACLC036. tel-01629435
NNT : 2017SACLC036
THESE DE DOCTORAT DE
L’UNIVERSITE PARIS-SACLAY
PREPAREE A
CENTRALESUPELEC
Ecole Doctorale n° 575 Physique et ingénierie : Electrons, Photons, Sciences du vivant
Spécialité de doctorat : Génie électrique
Par
M. Jad TAKI
Contribution aux modèles des perturbations électromagnétiques émises par les convertisseurs de l’électronique de puissance
Thèse présentée et soutenue à Gif-Sur-Yvette, le 05 Octobre 2017
Composition du Jury :
M. Philippe DESSANTE, Professeur, CentraleSupélec Président
Mme Françoise PALADIAN, Professeur, Institut Pascal Rapporteur
M. Fabrice DUVAL, Enseignant – Chercheur, CESI Mont-Saint-Aignan Rapporteur
M. Alain JAAFARI, Professeur, ECAM-EPMI, Examinateur
M. Mohamed BENSETTI, Professeur, CentraleSupélec Examinateur
M. Daniel SADARNAC, Professeur, CentraleSupélec Directeur de thèse
M. David BOUDIKIAN, Responsable laboratoire CEM, Valéo Invité

1
2
Table des matières
Table des matières .................................................................................................................................. 2
Table des figures ...................................................................................................................................... 6
Contexte et problématiques ................................................................................................................. 12
1. Introduction ................................................................................................................................... 14
2. Une petite histoire du début de la CEM ........................................................................................ 15
A. Evolution des perturbations ...................................................................................................... 15
B. Emergence des réglementations ............................................................................................... 16
3. Mécanismes de la CEM .................................................................................................................. 18
4. Positionnement de nos travaux. ................................................................................................... 19
Chapitre I : Modélisation des composants passifs ................................................................................ 24
I.1 Composants passifs .......................................................................................................................... 26
I.2 Différentes technologies .................................................................................................................. 27
I.2.1 Résistances ................................................................................................................................ 27
I.2.1.1 Résistance en carbone ........................................................................................................ 27
I.2.1.2 Résistance à fil bobiné ........................................................................................................ 28
I.2.1.3 Résistance film .................................................................................................................... 29
I.2.2 Condensateurs ........................................................................................................................... 30
I.2.2.1 Condensateurs électrolytiques ........................................................................................... 31
I.2.2.2 Condensateurs films ........................................................................................................... 32
I.2.2.3 Condensateurs céramiques ................................................................................................ 32
I.2.3 Bobines ...................................................................................................................................... 33
I.2.3.1 Matériaux magnétiques dédiés à l’électronique de puissance .......................................... 34
I.2.3.2 Bobinages ........................................................................................................................... 35
I.3 Modélisation ..................................................................................................................................... 36
I.3.1 Modèles Analytiques ................................................................................................................. 36
I.3.1.1 Solénoïde ............................................................................................................................ 36
3
I.3.1.2 Condensateur multicouches ............................................................................................... 45
I.3.2 Modèles basés sur la mesure .................................................................................................... 48
I.3.2.1 Utilisation d’un analyseur de réseau .................................................................................. 48
I.3.2.2 Détermination des paramètres du modèle ........................................................................ 52
I.4 Application sur un filtre .................................................................................................................... 63
I.5 Conclusion ........................................................................................................................................ 65
Chapitre II : Modélisation des composants actifs ................................................................................. 68
II.1 Composants actifs .......................................................................................................................... 70
II.2 Modélisation .................................................................................................................................... 72
II.2.1 Modélisation dans le domaine temporel ................................................................................. 74
II.2.1.1 Modèle de résistance variable .......................................................................................... 76
II.2.1.2 Modèle de résistance variable avec des éléments parasites ............................................ 77
II.2.1.3 Modèle complet du MOSFET ............................................................................................. 78
II.2.1.4 Modèle basé sur la mesure ............................................................................................... 79
II.2.2 Modélisation dans le domaine fréquentiel .............................................................................. 92
II.2.2.1 Forme d’onde carrée ......................................................................................................... 93
II.2.2.2 Forme d’onde trapézoïdale ............................................................................................... 93
II.2.2.3 Forme d’onde trapézoïdale non régulière ........................................................................ 94
II.2.2.3 Forme d’onde trapézoïdale non régulière avec oscillations ............................................. 94
II.3 Comparaison des modèles .............................................................................................................. 95
II.3.1 Comparaison des formes d’ondes temporelles ....................................................................... 98
II.3.2 Comparaison des spectres fréquentiels des perturbations ................................................... 100
II.3.3 Comparaison des temps de simulations ................................................................................ 103
II.4 Conclusion……………………………………………………………………………………………………………..…………………104
Chapitre III : Modélisation du PCB ....................................................................................................... 106
III.1 Introduction ............................................................................................................................. 108
III.2 Modélisation ............................................................................................................................ 108
III.2.1 Méthode PEEC ................................................................................................................. 111
4
III.2.2 Méthode des moments MoM ......................................................................................... 116
III.2.3 Calcul de l’inductance et la résistance interne du plan de masse ................................... 121
III.2.4 Validation ........................................................................................................................ 123
III.3 Conclusion………………………………………………………………………………………………………………….127
Chapitre IV : Optimisation du routage et de l’emplacement des composants ................................... 130
IV.1 Introduction ............................................................................................................................. 132
IV.2 Choix de l’algorithme évolutionnaire ........................................................................................... 132
IV.3 Optimisation du routage .............................................................................................................. 133
IV.3.1 Règles générales et hypothèses ............................................................................................ 135
IV.3.2 Cas 1 : Liaisons à deux pistes ................................................................................................. 135
IV.3.3 Cas 2 : Liaisons à cinq pistes .................................................................................................. 143
IV.4 Optimisation de l’emplacement des composants ....................................................................... 146
IV.5 Conclusion ............................................................................................................................... 151
Conclusions et Perspectives ................................................................................................................ 154
1. Conclusions générales ................................................................................................................. 156
2. Perspectives ................................................................................................................................. 157
Références ........................................................................................................................................... 160
ANNEXES .............................................................................................................................................. 166
Annexe A – Relation entre les paramètres S et les impédances ......................................................... 166
ANNEXE B : Algorithme d’évolution différentielle dédiée à la caractérisation des modèles des
composants passifs.............................................................................................................................. 170
B.1. Algorithme d’évolution différentielle....................................................................................... 170
B.2 Application aux modèles de composants passifs ...................................................................... 171

5
6
Table des figures
Figure 1: Approche ascendante, bottom-up .......................................................................................... 21
Figure 1.1: Constitution d'une résistance à couche de carbone [21] .................................................... 28
Figure 1.2: Résistance à fil bobtiné [23] ................................................................................................ 29
Figure 1.3: Résistance film métallique [24] ........................................................................................... 29
Figure 1.4: Coupe d’un condensateur électrolytique aluminium [26] .................................................. 31
Figure 1.5: Coupe sur un condensateur film [28] .................................................................................. 32
Figure 1.6: La partie interne d'un condensateur céramique [31] ......................................................... 33
Figure 1.7: Différents types de bobinage [36] ....................................................................................... 34
Figure 1.8: Solénoïde bobinée sur un noyau magnétique [36] ............................................................. 36
Figure 1.9: Modèle d'un solénoïde à trois spires .................................................................................. 37
Figure 1.10: Section de deux spires sur un noyau magnétique ............................................................ 39
Figure 1.11: Abaque de la perméabilité effective du solénoïde[43] ..................................................... 41
Figure 1.12: Chemin du champ électrique entre deux conducteurs ..................................................... 42
Figure 1.13: Solénoïde réalisé au laboratoire ....................................................................................... 43
Figure 1.14: Comparaison entre le module de l'impédance du modèle du solénoïde et le module
mesuré ................................................................................................................................................... 44
Figure 1.15: Comparaison entre la phase de l'impédance du modèle du solénoïde et la phase
mesurée ................................................................................................................................................. 44
Figure 1.16: Coupe sur un condensateur film multicouche [48] ........................................................... 45
Figure 1.17: Condensateur céramique à N couches .............................................................................. 46
Figure 1.18: Comparaison entre le module de l'impédance du modèle et le module mesuré ............ 47
Figure 1.19: Comparaison entre la phase du modèle et la phase mesurée .......................................... 47
Figure 1.20: Méthodologie de caractérisation [79] ............................................................................... 48
Figure 1.21: Kit de calibrage avec pistes ............................................................................................... 49
Figure 1.22: Incertitude sur les impédances mesurées [51] ................................................................. 49
Figure 1.23: Configuration de mesure du coefficient de réflexion ....................................................... 50
Figure 1.24: Configuration de mesure du coefficient de transmission – Composant série .................. 51
Figure 1.25: Configuration de mesure du coefficient de transmission - Composant parallèle............. 52
Figure 1.26: Modèle équivalent d'une résistance ................................................................................. 53
Figure 1.27: Comparaison entre le module de l'impédance mesuré de la résistance et celui du modèle
............................................................................................................................................................... 54
Figure 1.28: Comparaison entre la phase de l'impédance mesurée de la résistance et celle du modèle
............................................................................................................................................................... 54
7
Figure 1.29: Modèle de la résistance .................................................................................................... 54
Figure 1.30: Modèle équivalent du condensateur ................................................................................ 55
Figure 1.31: Modèle équivalent simplifié du condensateur ................................................................. 55
Figure 1.32: Modèle 1 d'ESR dont la valeur diminue avec la fréquence ............................................... 56
Figure 1.33: Modèle 2 d'ESR dont la valeur diminue avec la fréquence ............................................... 57
Figure 1.34: Modèle d'ESR dont la valeur augmente avec la fréquence............................................... 57
Figure 1.35: Modèle du condensateur 15 nF ........................................................................................ 58
Figure 1.36: Comparaison entre le module de l'impédance du condensateur céramique mesuré et
celui du modèle ..................................................................................................................................... 58
Figure 1.37: Comparaison entre le module de l'impédance du condensateur électrolytique mesuré et
celui du modèle ..................................................................................................................................... 59
Figure 1.38: Modèle équivalent de la bobine ....................................................................................... 60
Figure 1.39: Modèle de la cellule qui représente une résonance de la bobine .................................... 61
Figure 1.40: Comparaison entre le module de l'impédance mesurée de la bobine et celui du modèle
............................................................................................................................................................... 62
Figure 1.41: Comparaison entre la phase de l'impédance mesurée de la bobine et celui du modèle . 62
Figure 1.42: Modèle de la bobine ......................................................................................................... 63
Figure 1.43: Modèle d'un filtre LC ......................................................................................................... 64
Figure 1.44: Schéma de la réponse du filtre LC ..................................................................................... 64
Figure 1.45: Comparaison de la réponse du filtre des modèles analytiques et des modèles basés sur la
mesure ................................................................................................................................................... 65
Figure 2.1: Symbole du MOSFET ........................................................................................................... 72
Figure 2.2: Variation des tensions et courants du MOSFET .................................................................. 73
Figure 2.3: Modèle MOSFET RDSon/off ...................................................................................................... 76
Figure 2.4:Variation de la capacité CDS en fonction de la tension VDS ................................................... 77
Figure 2.5: Modèle MOSFET RDSon/off, avec des éléments parasites ...................................................... 77
Figure 2.6: Modèle MOSFET complet .................................................................................................... 78
Figure 2.7: Keysight B1500A SMU ......................................................................................................... 80
Figure 2.8: Caractéristique statique du MOSFET................................................................................... 80
Figure 2.9: Schéma de base d'un té de polarisation ............................................................................. 82
Figure 2.10: Modèle MOSFET – cas mesure DS avec GS en CC ............................................................. 84
Figure 2.11: Module de l'impédance entre le drain et la source en fonction de la fréquence ............. 84
Figure 2.12: Phase de l'impédance entre le drain et la source en fonction de la fréquence ................ 85
Figure 2.13: Schéma équivalent du modèle de l'impédance mesurée pour le cas 1 ............................ 85
8
Figure 2.14: Schémas équivalents correspondant au cas 1 pour les trois systèmes, résistifs, inductifs
et capacitifs ........................................................................................................................................... 86
Figure 2.15: Capacité Coss en fonction de la tension VDS ........................................................................ 87
Figure 2.16: Modèle MOSFET - cas mesure DS avec GD en CC ............................................................. 87
Figure 2.17 :Modèle MOSFET - cas mesure GS avec DS en CC .............................................................. 89
Figure 2.18: Variation de la capacité CDS en fonction de la tension VDS ................................................ 91
Figure 2.19: Variation de la capacité CDG en fonction de la tension VDS ............................................ 91
Figure 2.20: Source de perturbation équivalente dans le domaine temporel - forme d'onde carrée . 93
Figure 2.21: Source de perturbation équivalente dans le domaine temporel - forme d'onde
trapézoïdale ........................................................................................................................................... 93
Figure 2.22: Source de perturbation équivalente dans le domaine temporel - forme d'onde
trapézoïdale non régulière .................................................................................................................... 94
Figure 2.23: Source de perturbation équivalente dans le domaine temporel - forme d'onde
trapézoïdale non régulière avec oscillations ......................................................................................... 94
Figure 2.24: Oscillation amortie de période T ....................................................................................... 95
Figure 2.25: Convertisseur hacheur abaisseur de tension (Buck) ......................................................... 96
Figure 2.26: Schéma d'une diode........................................................................................................... 97
Figure 2.27: Caractéristique statistique de la diode du MOSFET - Mesure et modèle ......................... 97
Figure 2.28: Modèle électrique du RSIL (Schwarzbeck NNBM 8124) .................................................... 97
Figure 2.29: Tension VDS aux bornes du MOSFET -Modèle RDSon/off ....................................................... 98
Figure 2.30: Comparaison de la tension aux bornes du MOSFET pendant l’ouverture pour différents
modèles ................................................................................................................................................. 99
Figure 2.31: Comparaison de la tension aux bornes du MOSFET pendant la fermeture pour différents
modèles ............................................................................................................................................... 100
Figure 2.32: Topologie de la mesure des perturbations conduites..................................................... 101
Figure 2.33: Banc de mesure des perturbations conduites ................................................................ 101
Figure 2.34: Enveloppes des spectres des perturbations – Modèles temporels ................................ 102
Figure 2.35: Enveloppes des spectres des perturbations - Modèles fréquentiels .............................. 103
Figure 3.1: Une piste de PCB au-dessus d'un plan de masse [78] ....................................................... 109
Figure 3.2: Schéma électrique équivalent d'une ligne de transmission .............................................. 109
Figure 3.3: Piste divisée en N sous-pistes pour la méthode PEEC ....................................................... 112
Figure 3.4: Deux conducteurs dans l'espace ....................................................................................... 114
Figure 3.5: Conducteur virtuel créé par deux conducteurs ................................................................ 115
Figure 3.6: Distribution de charge dans une piste .............................................................................. 116
Figure 3.7: Image d'une charge ponctuelle au-dessus d’un diélectrique ........................................... 118
9
Figure 3.8: Image d'une charge ponctuelle sur la surface d’un diélectrique ...................................... 119
Figure 3.9: Variation de la constante diélectrique de différents matériaux en fonction de la fréquence
[70] ...................................................................................................................................................... 121
Figure 3.10: Modèle représentant la variation de la résistance et l'inductance avec la fréquence ... 123
Figure 3.11: Variation de la résistance linéique de la piste en fonction de la fréquence ................... 124
Figure 3.12 : Variation de la résistance linéique du plan de masse en fonction de la fréquence....... 124
Figure 3.13: Variation de l’inductance interne linéique de la piste en fonction de la fréquence ....... 125
Figure 3.14: Variation de l’inductance interne linéique du plan de masse en fonction de la fréquence
............................................................................................................................................................. 125
Figure 3.15: Comparaison entre les perturbations du Buck dans 3 cas différents ............................. 127
Figure 4.1: Organigramme de l'algorithme d'optimisation ................................................................. 135
Figure 4.2: Liaison à deux pistes entre deux composants ................................................................... 136
Figure 4.3: Exemple de maillage du circuit.......................................................................................... 136
Figure 4.4: Placement des composants sur la carte ............................................................................ 137
Figure 4.5: Routage par défaut de l'optimisation du cas 1 ................................................................. 139
Figure 4.6: Un exemple du balayage horizontal pour modéliser les pistes ........................................ 140
Figure 4.7: Modèle électrique d'un groupe de segments de pistes .................................................... 141
Figure 4.8: Comparaison des routages de la première optimisation .................................................. 142
Figure 4.9: Comparaison des spectres de la première optimisation ................................................... 143
Figure 4.10: Variation de la fonction objectif au cours des itérations ................................................ 145
Figure 4.11: Comparaison des routages de la deuxième optimisation ............................................... 145
Figure 4.12: Comparaison des spectres de la deuxième optimisation................................................ 146
Figure 13: Variation de la fonction objectif pour l’optimisation de l’emplacement des composants 148
Figure 4.14: Emplacement par défaut des composants ...................................................................... 149
Figure 4.15: Emplacement optimal des composants .......................................................................... 149
Figure 4.16: Comparaison des spectres de l’optimisation des emplacements de composants ......... 150
Figure A.1: Tensions et courants dans un quadripôle ......................................................................... 166
Figure A.2: Quadripôle représenté avec ces ondes incidentes et réfléchies ...................................... 167
10

11
12
Contexte et problématiques

13
14
1. Introduction
Le concept du « plus électrique » réapparait périodiquement dans différents domaines. Une des
premières occurrences concerne l'électrification du transport ferroviaire. Plus récemment, dans les
années 90, de nombreux actionneurs hydrauliques ont été remplacés par leurs équivalents
électriques dans les voitures. De nos jours, cette même mutation se fait dans les avions. Le véhicule
totalement électrique est envisagé sérieusement pour l’avenir. La souplesse apportée par
l’électricité, le rendement élevé ainsi que les fonctionnalités supplémentaires sont déterminants
dans les choix stratégiques, notamment à l'heure de la transition énergétique.
Ce développement massif depuis une vingtaine d'années dans les systèmes autonomes aboutit
maintenant à une recherche de maturité technologique: assurer le fonctionnement n’est plus la
seule contrainte à ce stade là, mais le garantir et assurer la sécurité des biens et des équipements
deviennent un enjeu important. En effet, plusieurs organes de base des systèmes automobiles et
aéronautiques comme la direction ou les commandes de vol sont devenus électriques et de ce fait
garantir le bon fonctionnement de ces organes sensibles devient une priorité absolue. La notion de
sûreté de fonctionnement est un critère indispensable à prendre en considération lors de la
conception des dispositifs électriques. Or, la conversion d'énergie à haut rendement via l’utilisation
de convertisseurs d’électronique de puissance est utilisée dans la quasi-totalité des dispositifs
utilisant l’énergie électrique. L’objectif recherché est de modifier la source électrique pour l’adapter
aux exigences du récepteur. Cette utilisation des convertisseurs de puissance génère en contre partie
des perturbations électromagnétiques liées aux variations rapides de tension et de courant.
Malgré l’apparition de nouveaux composants de puissance qui permettent d’avoir une meilleure
gestion d’énergie, un meilleur rendement avec un coût raisonnable, il reste néanmoins la contrainte
des niveaux d’interférences électromagnétiques élevées générées par ces composants. Pour cette
raison, il devient nécessaire d’intégrer la problématique de la compatibilité électromagnétique (CEM)
dans le but de réduire les perturbations électromagnétique et cela dès la phase de conception.
La problématique CEM ne date pas d’aujourd’hui. Depuis un certain temps, des dysfonctionnements
des systèmes électriques ont abouti à des conséquences graves dans leurs environnements et la CEM
était un des suspects de ces défauts.
En 1996, le vol TWA 800 de New York à Paris s’est soldé par une explosion au-dessus de l’océan, peu
après le décollage. Après une longue enquête qui a impliqué la récupération et la reconstruction de
grandes parties de l’avion, il a été conclu que la cause la plus probable de l’explosion a été une
étincelle dans le réservoir de carburant central. Cette étincelle a probablement été la conséquence
directe d’une surtension transitoire [1].
15
En 2007, les résultats d’une étude menée par des chercheurs de l’Université d’Amsterdam [2] ont
documenté près de 50 incidents d’interférence électromagnétique qui viennent de l’utilisation des
téléphones portables dans les hôpitaux dont 75% ont été classés comme importants ou dangereux.
Une autre étude, publiée en 2008 par des chercheurs d’Amsterdam, a montré que les interférences
électromagnétiques des dispositifs d’identification de radiofréquences (RFID) ont le potentiel
d’arrêter le fonctionnement des équipements médicaux de soins intensifs.
Ce ne sont malheureusement pas des cas isolés. Les problèmes de CEM se traduisent par de
nombreux incidents chaque année. Ces incidents ont poussé les concepteurs à définir des normes
(CISPR25, ISO 7637…..) [3] qui limitent les niveaux de perturbation maximale qu’un produit pourra
émettre (émission électromagnétique) et la perturbation minimale que ce produit devra supporter
(susceptibilité électromagnétique). La CEM est généralement définie comme un état qui existe
lorsque tous les appareils dans un système sont capables de fonctionner sans erreur dans leur
environnement électromagnétique.
Le but des normes est de démontrer d’une manière rigoureuse et reproductible la conformité d’un
dispositif. Les essais effectués sur un dispositif prennent en compte la plupart des phénomènes de
perturbations rencontrés et permettent ainsi de valider l'aptitude d'un dispositif ou d'un système à
fonctionner d’une manière satisfaisante dans un environnement électromagnétique prédéterminé,
en fonction des niveaux de sévérité appliqués.
2. Une petite histoire du début de la CEM
A. Evolution des perturbations
On pourra dire que l’interférence et sa correction ont surgi avec les expériences de Marconi
(inspirées de celles de Hertz qui validaient la théorie de Maxwell) en 1895 [4]. En 1901 [4], il a réalisé
la première transmission transatlantique par un réseau de fils de cuivre. Les seuls récepteurs
d’importance à ce moment-là étaient des récepteurs radio. Ceux-ci étaient peu nombreux et
largement séparés, de sorte que la correction d’un problème d’interférence était relativement
simple. Toutefois, des articles techniques concernant les interférences radio ont commencé à
apparaître dans diverses revues techniques autour de 1920 [5][6][7][8][9]. Les récepteurs radio et les
antennes étaient plutôt rudimentaires et étaient sensibles à des interférences, soit à partir de
sources externes, soit à partir de l’intérieur même de ces systèmes (oscillations auto-induites). Les
améliorations dans la conception ont résolu une large partie de ces problèmes. Les interférences
radio des appareils électriques tels que les moteurs électriques, les chemins de fer électriques et les
feux électriques sont apparus comme un problème majeur vers 1930.
16
Pendant la seconde guerre mondiale, l’utilisation des appareils électroniques, principalement les
radios, les dispositifs de navigation et les radars, s’est accélérée. Les évènements d’interférences
entre les radios et les dispositifs de navigations sur les avions ont commencé à augmenter. Celles-ci
sont généralement faciles à corriger en réaffectant les fréquences de transmission dans un spectre
peu utilisé ou en déplaçant les câbles loin des sources d’émission pour éviter que ces câbles ne
reçoivent ces émissions. Étant donné que la densité de l’électronique était considérablement
inférieure à ce qu’elle est aujourd’hui, ces solutions pouvaient être facilement mises en œuvre pour
chaque cas séparé afin de résoudre tout problème d’interférence électromagnétique (IEM).
Cependant, l’augmentation des problèmes d’interférences la plus importante est apparue avec les
composants électroniques de haute densité, tels que le transistor bipolaire dans les années 1950, les
circuits intégrés (CI) dans les années 1960, et la puce du microprocesseur dans les années 1970. Le
spectre de fréquence est devenu plus encombré avec l’augmentation de la demande pour la
transmission de la voix et des données. La nécessité de planifier l’utilisation du spectre de fréquence
s’est donc imposée et reste un enjeu majeur aujourd’hui encore.
La problématique CEM s’est donc révélée incontournable suite à l’introduction du traitement de
signal numérique et du calcul numérique. Au début des années 1960 [10][11], les ordinateurs
numériques utilisaient des tubes à vide comme composants de commutation. Dans les années 1970,
le circuit intégré a permis la création des ordinateurs qui consomment beaucoup moins d’énergie et
demandent beaucoup moins d’espace physique. Vers la fin des années 1970, la tendance à remplacer
le traitement de signal analogique par le traitement de signal numérique a commencé à accélérer.
Presque toutes les fonctions électroniques ont été implémentées numériquement grâce à
l’augmentation de la vitesse de commutation et la miniaturisation des circuits intégrés. La mise en
œuvre des différentes tâches allant du calcul au traitement de texte en passant par la commande
numérique se généralise et continue jusqu’à aujourd’hui. Cela signifie que la densité des sources de
bruits riches en contenu spectral (formes d’ondes commutées) devient de plus en plus grande. Par
conséquent, l’occurrence des problèmes d’interférences électromagnétiques est croissante.
B. Emergence des réglementations
En raison de l’augmentation des occurrences d’interférences entre les câbles et les communications
radio, la Commission Fédérale de Communication (Federal Commuinication Commission – FCC) aux
États-Unis a publié un règlement en 1979 qui exigeait que les émissions électromagnétiques de tous
les « dispositifs numériques » soient en-dessous de certaines limites [12]. Le but de cette règle était
d’essayer de limiter la « pollution électromagnétique » de l’environnement afin d’éviter, ou au moins
réduire, le nombre d’évènements d’IEM. Vu qu’aucun « appareil numérique » ne pouvait être vendu
17
si ses émissions électromagnétiques répondaient aux limites imposées par la FCC, le sujet de la CEM
a généré un vif intérêt parmi les fabricants du domaine électronique.
Cela ne laisse pas entendre que les États-Unis étaient les premiers à imposer des limites pour
« nettoyer l’environnement électromagnétique ». Les pays européens ont imposé des exigences
similaires sur les appareils numériques bien avant que la FCC n’ait publié ses règles. En 1933 [13], une
réunion de la Commission Électrotechnique Internationale à Paris a recommandé la formation d’un
Comité International Spécial des Perturbations Radioélectriques (CISPR) pour faire face aux
problèmes d’IEM. Ce comité a permis de définir les normes limitant les perturbations
électromagnétiques des équipements électriques et électroniques. Il a aussi produit un document
détaillant les équipements de mesure pour déterminer les émissions IEM potentielles. Le CISPR s’est
réuni de nouveau après la seconde guerre mondiale à Londres en 1946. Les réunions suivantes ont
abouti à diverses publications techniques, qui traitent des techniques de mesures ainsi que des
limites d’émissions recommandées.
Un autre aspect de la réglementation concerne la susceptibilité. Des signaux perturbateurs sont
volontairement injectés dans l’équipement, qui doit alors fonctionner correctement en présence de
ces signaux. Même si un produit électronique est conforme aux exigences d’émission, il peut causer
des interférences ou être sensible aux émissions d’un autre dispositif électronique à proximité. Les
exigences en émission tendent à limiter la pollution électromagnétique. Les exigences de
susceptibilité visent à assurer un fonctionnement correct de tous les équipements.
18
3. Mécanismes de la CEM
La CEM met en jeu une trilogie (source – couplage –victime). La source (ou émetteur) produit la
perturbation, qui transite par un chemin de couplage vers la victime (ou récepteur) ; l’énergie
d’émission se traduit par un comportement souhaitable ou non.
Une interférence se crée quand l’énergie reçue engendre un comportement indésirable au niveau du
récepteur. Le transfert de l'énergie électromagnétique se produit souvent par les modes de couplage
involontaires. Cependant, l’interférence n’est pas systématique car le transfert d’énergie involontaire
provoque des interférences uniquement si l’énergie reçue est d’une amplitude suffisante au niveau
du récepteur pour l’amener à se comporter d’une manière indésirable. Ainsi, la quantification des
interactions électromagnétiques est un axe de travail primordial en CEM.
L’interaction peut être d’origine intentionnelle (exemple : transmission radio) ou non intentionnelle
(exemple : couplage inductif entre deux circuits proches). Dans les deux cas, afin de limiter les
interférences, trois leviers sont à la disposition de l’ingénieur CEM :
réduire l’émission à sa source ;
minimiser le couplage ou rendre le chemin de couplage aussi inefficace que possible ;
rendre le récepteur moins sensible à l’émission.
Ces dernières années, dans le domaine de l’électronique de puissance, la technologie des
composants de commutation n’a cessé d’évoluer dans le but d’atteindre des fréquences de
commutation de plus en plus importante. L’augmentation de cette fréquence de commutation
permet en effet de réduire la taille des systèmes (en particulier la bobine) et par voie de
conséquence, une minimisation du poids qui s’avère fort avantageux dans le cas de systèmes
embarqués. Cette évolution technologique a fait apparaître en contrepartie des problèmes de pertes
par commutation, et engendre également des problèmes de CEM liés aux variations rapides des
grandeurs électriques.
Du point de vue de la CEM, ralentir la vitesse de commutation pourra être un moyen efficace pour
réduire la perturbation à la source. Or, cela n’est pas toujours possible. Dans ce cas, si la source de
perturbation ne peut être modifiée, le chemin des perturbations pourra être limité : un filtre haute
fréquence limitera les perturbations conduites et un blindage peut être utilisé pour protéger des
perturbations rayonnées. En général, le blindage est coûteux et sa performance réelle est
conditionnée par d’autres éléments et loin d’être idéale.
Dans le cas d’un convertisseur à découpage, la notion d’émission de perturbation est évidente. Il
convient d’introduire aussi la notion de susceptibilité. Le convertisseur est soumis à des
perturbations dans son environnement (exemples : d’autres convertisseurs ou des machines
19
électriques à balais) et il doit conserver un comportement acceptable malgré la proximité de ces
perturbations.
4. Positionnement de nos travaux.
Pour être conforme aux normes qui deviennent de plus en plus sévères et éviter le
dysfonctionnement des systèmes, il est nécessaire de prédire le comportement CEM d’un système et
cela dès la phase de conception. Les premiers pas de la CEM dans la conception électronique ne
consistaient qu’à valider un dimensionnement électronique en confrontant le produit aux différents
tests qu’il devait réussir. Même si cette démarche empirique a rapidement été facilitée par des règles
de conception établies par les électroniciens, elle n’en demeure pas moins lourde et coûteuse à
mettre en œuvre. Le besoin de moyens d’essais certifiant est une limite évidente à cette démarche
purement empirique. Plus généralement, les coûts de prototypage et, en cas de non-conformité, de
redimensionnement du produit, constituent un risque rédhibitoire pour l’industrie. Ainsi, il est
nécessaire d’introduire les problématiques CEM dès la phase de conception. Pour atteindre cet
objectif, il est nécessaire de disposer de méthodologies de conception mais également de modèles
pouvant prédire les phénomènes mis en jeu. Ces modèles de composants doivent permettre de
caractériser le comportement des systèmes en prenant en compte les aspects CEM en conduit et en
rayonné. La modélisation permet de prédire les perturbations générées par les dispositifs électriques
sans avoir à effectuer un ensemble de mesures et de les refaire à chaque fois que le produit
nécessite une modification pour le rendre conforme à la norme.
Les différents travaux initiés dans le domaine de la CEM des composants de puissance ont pour but
de développer des modèles de composants d’électronique de puissance et de développer des
méthodologies de caractérisation. Parmi ces travaux, on peut citer F. Lafon [51] qui a développé des
démarches de modélisation concernant les modèles des composants passifs basés sur la mesure ainsi
que les modèles du PCB. D’autre part, B. Revol [76] a travaillé sur la prédiction du niveau d’émission
conduite par simulation dans le but de prédire le filtrage CEM nécessaire et optimum pour le système
et minimiser le nombre de prototypes dans la phase du développement. Ces travaux se sont
concentrés sur le développement des modèles rapides et flexible à la variation de paramètres afin
d’éviter les longues simulations temporelles des logiciels type circuits tel que SABER. Afin de prédire
les perturbations CEM, il a utilisé des modèles matricielles rapides, efficaces pour les algorithmes
d’optimisations mais avec une perte de précision comme compromis. Dans les travaux de K.
Moustefauoui-Kasri [71], le problème de la pollution électromagnétique conduite d’une alimentation
à découpage pour application Radar est étudié. Ces travaux ont porté sur le développement des
modèles fréquentiels pour la prédiction des perturbations conduites en mode différentiel et en mode
commun engendrée par le SEPIC de l’application. Les modèles utilisés étaient souvent des modèles
20
fréquentiels rapides à simuler et qui sont basés sur la mesure. Dans [77] , T. De Oliveira a travaillé
pour sa part sur l’optimisation du routage dans un filtre CEM afin d’avoir une meilleure efficacité du
filtre. Il a utilisé la simulation numérique sur un logiciel commercial (InCa3D) de manière à pouvoir
calculer l’ensemble des phénomènes électromagnétiques parasites. Dans ces travaux le couplage
inter-composants n’a pas été considéré.
Mes travaux de thèse développés au GeePs constituent une complémentarité à ces travaux. Ils se
sont articulés autour du développement de modèles CEM de composants de puissance en conduit
pour la prédiction et la minimisation des perturbations électromagnétiques générées par les
dispositifs électriques.
Ces modèles sont généralement génériques pour permettre leurs intégrations dans des simulateurs
électriques (SPICE, PORTUNUS, SIMPLORER…) ou électromagnétiques (COMSOL, Maxwell, CST
Microwave, HFSS,…). Dans la bibliographie, les paramètres électriques des modèles peuvent être
obtenus par modélisation numérique, par des mesures ou à travers des formulations analytiques.
Dans certains cas, il est même avantageux d’utiliser les trois méthodes de manière complémentaire.
Pour ma part, l’ensemble des modèles développés sont issus de formulations analytiques et/ou à
partir de la mesure. Le temps de simulation est un paramètre important, un compromis doit être
trouvé entre la précision de l’analyse et la finesse du modèle choisi surtout lorsqu’il s’agit de traiter
des problèmes avec une large dispersion des constantes de temps. Pour cette raison, Nous avons
proposé des modèles avec plusieurs niveaux de complexité. Ce niveau de complexité dépendra
fortement de la bande de fréquence et de l’objectif recherché par la simulation.
Le domaine visé par ces travaux est le secteur automobile, un secteur contenant un nombre
important de dispositifs électroniques parmi ses équipements. La compacité, l’efficacité et la
complexité des équipements automobiles sont des critères de plus en plus contraints par les attentes
des clients, les exigences des normes ou encore les questions environnementales. Ces contraintes
influent sur la conception de l’ensemble des équipements automobiles. Les équipements
électroniques de ce secteur doivent être conformes à la norme CISPR 25 ou/et différents cahiers des
charges imposés par les constructeurs.
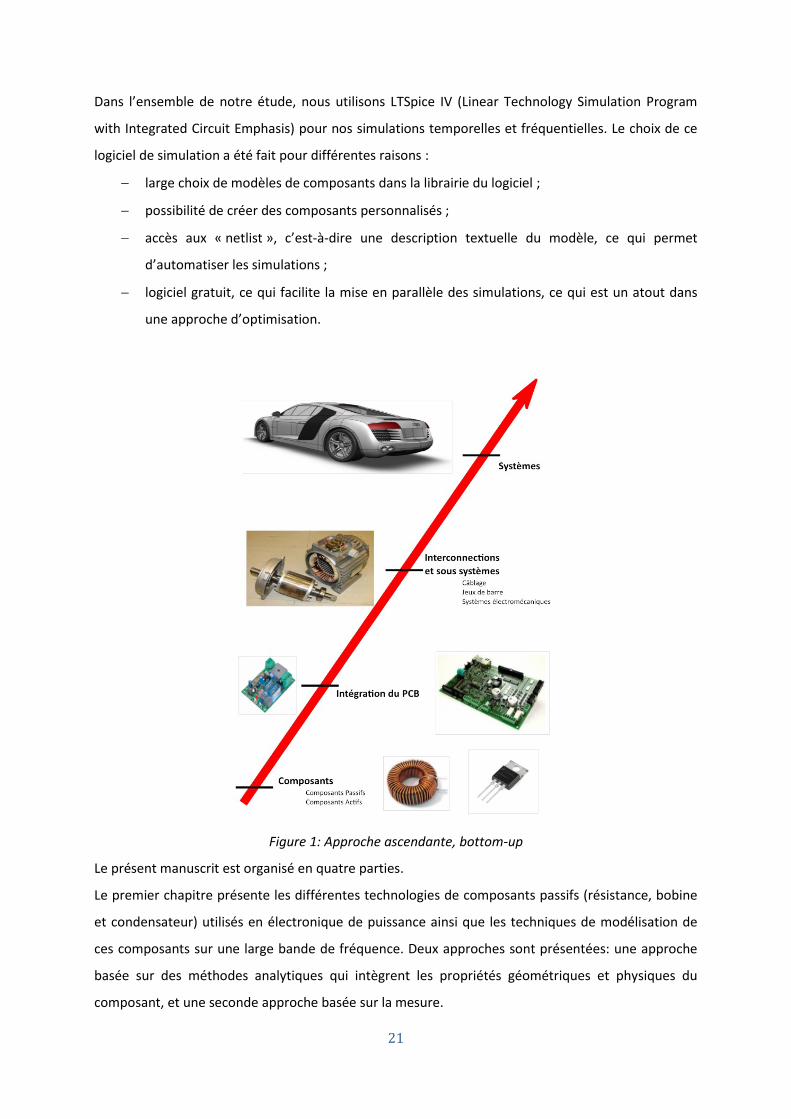
Afin d'anticiper les problèmes CEM et réduire les délais de développement, il devient nécessaire de
prédire par simulation les perturbations générées par les convertisseurs de puissance en utilisant des
modèles de composants, c’est ce qu’on appelle la CEM des systèmes. L’approche mise en place dans
ces travaux de thèse pour la prédiction de ces perturbations est appelé approche ascendante dite
« bottom-up ». Cette technique permet d’assembler les modèles CEM de chaque composant de
façon à constituer le modèle complet du système, comme illustré sur la Figure 1. La validation de
cette méthode dépend de la précision des modèles développés.
21
Dans l’ensemble de notre étude, nous utilisons LTSpice IV (Linear Technology Simulation Program
with Integrated Circuit Emphasis) pour nos simulations temporelles et fréquentielles. Le choix de ce
logiciel de simulation a été fait pour différentes raisons :
large choix de modèles de composants dans la librairie du logiciel ;
possibilité de créer des composants personnalisés ;
accès aux « netlist », c’est-à-dire une description textuelle du modèle, ce qui permet
d’automatiser les simulations ;
logiciel gratuit, ce qui facilite la mise en parallèle des simulations, ce qui est un atout dans
une approche d’optimisation.
Figure 1: Approche ascendante, bottom-up
Le présent manuscrit est organisé en quatre parties.
Le premier chapitre présente les différentes technologies de composants passifs (résistance, bobine
et condensateur) utilisés en électronique de puissance ainsi que les techniques de modélisation de
ces composants sur une large bande de fréquence. Deux approches sont présentées: une approche
basée sur des méthodes analytiques qui intègrent les propriétés géométriques et physiques du
composant, et une seconde approche basée sur la mesure.

22
Le chapitre suivant traite une approche pour la modélisation d’un composant actif, le transistor
MOSFET. Le choix du MOSFET parmi les autres composants actifs a été fait grâce à ses
caractéristiques de commutations rapides ainsi qu’il est le mieux adapté aux applications de faibles
puissances (comme dans l’automobile). L’approche proposée dans ce manuscrit est basée sur deux
étapes, statique puis dynamique.
Le troisième chapitre porte sur la modélisation du PCB dans le but de déterminer son modèle
électrique équivalent. L’approche développée est hybride utilisant des modèles analytiques et
numériques.
Le dernier chapitre de ce manuscrit est lié au caractère prédictif de la modélisation établie. Dès lors
qu’un modèle paramétré permet de prédire le comportement physique d’un système, il ouvre la voie
à l’utilisation des méthodes d’optimisation. Dans cette partie, on utilisera les modèles développés
dans les deux chapitres précédents pour les intégrer dans un processus d’optimisation.
L’optimisation aura pour but d’améliorer le routage du PCB d’un point de vue CEM.

23
24
Chapitre I
Modélisation des composants
passifs

25
26
I.1 Composants passifs
Les composants passifs classiques que sont les résistances, les condensateurs, les bobines et les
transformateurs ne sont jamais idéaux [19]. En réalité, le comportement de chaque composant peut
être considéré comme la combinaison d’effets résistifs, capacitifs et inductifs. Leur raccordement,
entre eux ou vers d’autres éléments, introduit par ailleurs certaines imperfections. L’ensemble des
défauts peut conduire au dysfonctionnement des dispositifs mettant en œuvre ces composants.
En outre, ces effets dépendent de la fréquence d’utilisation ou de la fréquence de perturbation
considérée. Les matériaux et les technologies des composants affectent les caractéristiques,
notamment fréquentielles de ces composants.
Il est nécessaire de disposer de modèles permettant de rendre compte au mieux du comportement
fréquentiel des composants passifs en vue de prévoir les performances des convertisseurs de
l’électronique de puissance.
Quelle que soit la complexité des modèles choisis, ils doivent s’appuyer sur la physique pour espérer
représenter la réalité à un niveau de détail suffisant.
Dans ce chapitre, plusieurs modèles de composants passifs (bobine, condensateur, résistance) sous
forme de circuits électriques équivalents seront développés et analysés. Ces modèles visent à
représenter les composants dans des domaines où les modèles basses-fréquences ne sont plus
valides. Ils offrent par ailleurs une interprétation qui reste physique, comme nous le verrons dans ce
chapitre.
Tous les composants passifs possèdent des éléments parasites qui impactent fortement le
comportement de l’impédance en fonction de la fréquence et peuvent faire apparaître des
résonances. Les effets parasites peuvent être classés en trois catégories :
1. Effets résistifs
2. Effets inductifs
3. Effets capacitifs
Les effets résistifs proviennent de la résistance au passage d’un courant dans les matériaux utilisés.
Ces effets dépendent des caractéristiques géométriques et physiques de ces matériaux. Ils peuvent
être considérés comme invariants dans un certain domaine de fréquence ou, au contraire,
dépendent de la fréquence, notamment en raison des effets de peau et de proximité.
Les effets inductifs apparaissent dès lors qu’un circuit est traversé par un courant, lequel crée un
champ et un flux magnétiques par la boucle formée par ce circuit. La notion même et la valeur d’une
inductance dépendent de ce flux magnétique généré et de son environnement.
27
Les effets capacitifs apparaissent lorsque deux surfaces conductrices ne sont pas portées au même
potentiel. La capacité apparente dépend de la géométrie des surfaces, de leur position relative ainsi
que du type du matériau (permittivité électrique du diélectrique) qui les sépare.
Ces dernières années, les concepteurs en ont recours de plus en plus à la simulation pour prédire les
perturbations CEM et réduire les délais de conception de leurs produits. Si l’on parvient à modéliser
les composants de notre système, on pourra dès lors envisager de modéliser une carte de puissance
d’un point de vue CEM. La limite d’une telle approche réside dans la validité des résultats des
simulations de nos systèmes qui dépendent alors de la validité de nos modèles.
L’objet de ce chapitre est d’évaluer les différentes méthodes de modélisation des composants passifs
sur une plage de fréquence étendue. Les méthodes peuvent être numériques, analytiques ou basées
sur la mesure. Les méthodes numériques demandent un temps important pour la simulation. Nous
nous sommes donc concentrer sur les méthodes analytiques et basées sur la mesure. Les modèles de
composants doivent être compatibles avec des simulateurs électriques de type Spice afin de
représenter le comportement électromagnétique conduit d’un système complet. La fréquence est le
critère à considérer lors de la détermination des éléments du modèle électrique équivalent.
I.2 Différentes technologies
Pour les trois types de composants passifs, à savoir les résistances, les condensateurs et les bobines,
nous allons présenter les technologies habituellement dédiées à l’électronique de puissance.
I.2.1 Résistances
La résistance est un composant passif commun mais « boudé » en électronique de puissance car
étant le siège de pertes énergétiques [20]. Elle est essentiellement utilisée dans les snubbers, les
filtres et dans l’électronique de commande des convertisseurs. Elle se présente généralement sous
trois formes différentes : la résistance en carbone, la résistance à fil bobiné et la résistance film.
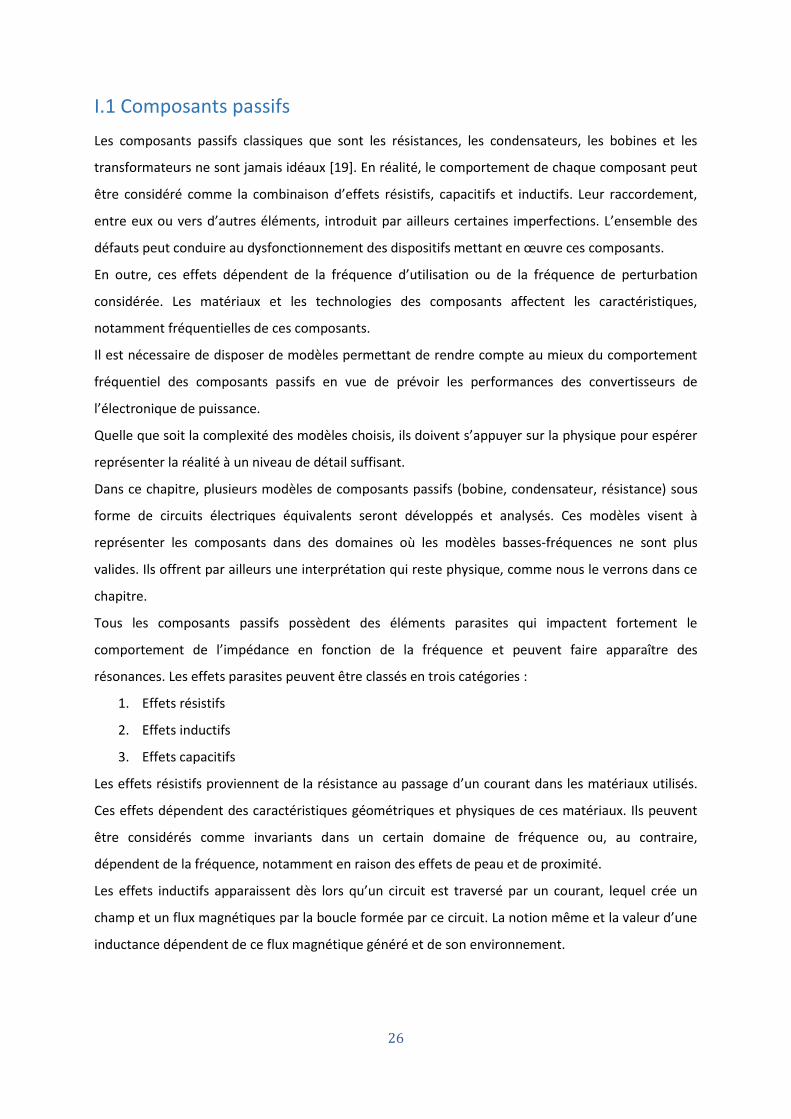
I.2.1.1 Résistance en carbone
La technologie la plus commune met en œuvre de fines particules de carbone (généralement
graphite) qui sont mélangées avec un matériau non conducteur. Cela mène à un court cylindre de
carbone raccordé aux deux électrodes métalliques comme illustré à la Figure 1.1.
Les résistances en carbone sont les plus courantes en raison de leur facilité de fabrication et de leur
faible coût. Elles ne sont généralement pas conçues pour supporter des courants importants. Un fort
courant pourrait faire chauffer le composant jusqu’à le dégrader de manière irréversible.
28
Figure 1.1: Constitution d'une résistance à couche de carbone [21]
Le grand avantage de cette technologie de résistance est son aptitude à résister à de fortes
impulsions énergétiques [22]: lorsqu’un courant traverse la résistance, c’est le volume complet du
composant qui est conducteur réalisant ainsi une inertie thermique relativement importante.
Cependant, les propriétés sont moins bonnes en termes de coefficient de température, bruit et
dépendance de la tension.
Il y a cinquante ans, les résistances en carbone ont été largement utilisées en électronique. En raison
de la faible stabilité de la valeur de la résistance, ce type de résistance ne convient pas pour toutes
les applications modernes qui demandent une grande précision. Par exemple, la valeur de la
résistance peut varier jusqu’à 5% après un an de non utilisation. Avec une utilisation intensive, cette
variation peut atteindre 15%. La raison de cette instabilité est inhérente à la conception de la
résistance.
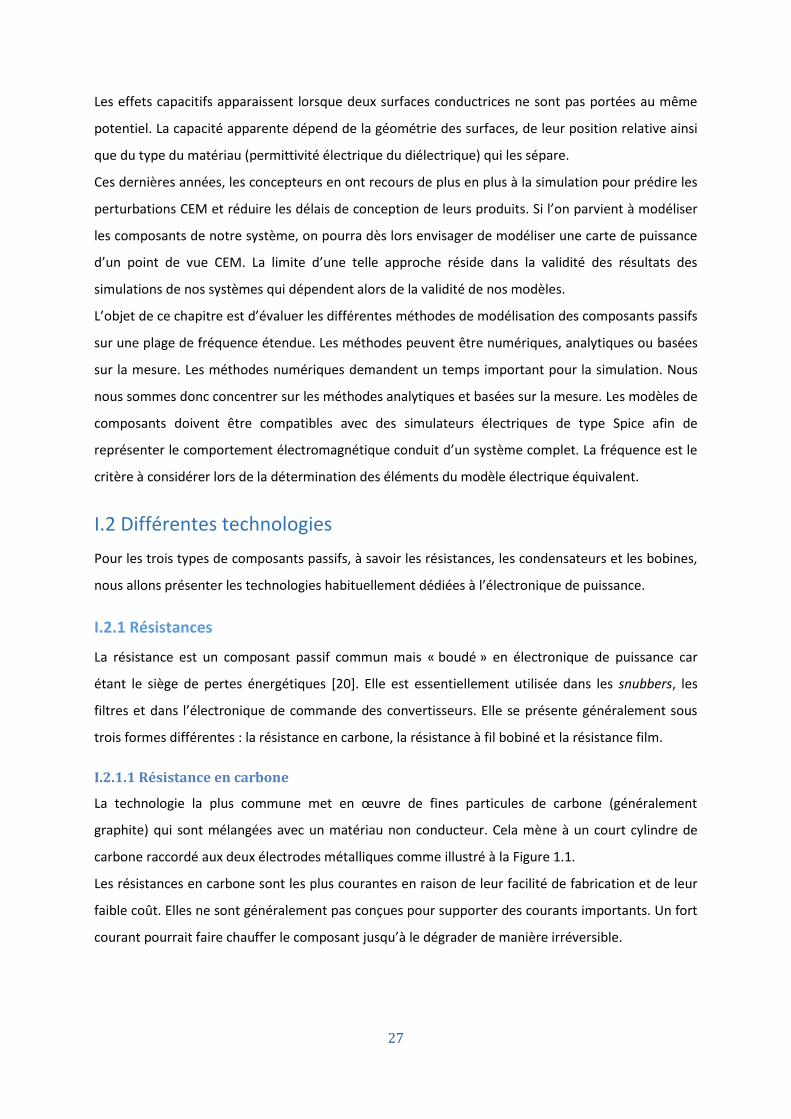
I.2.1.2 Résistance à fil bobiné
Avant l’invention de la radio, la quasi-totalité des résistances étaient des fils bobinés. Cette
technologie (Figure 1.2) est constituée d’un fil résistif qui est enroulé étroitement autour d’un tube
creux constitué d’un matériau non-conducteur et thermo-dissipatif (généralement en porcelaine).
Cet ensemble est recouvert d’un émail qui protège le fil et empêche l’oxydation et les changements
dus à la température et à l’humidité atmosphérique.
Bien que coûteuses et plus difficiles à fabriquer que les résistances de carbone, les résistances à fil
bobiné sont capables de supporter de forts courants [22] dans des applications telles que les
émetteurs radio puissants. Les résistances à fil bobinés peuvent être fabriquées avec des tolérances
beaucoup plus serrées que les résistances en carbone, lesquelles ont typiquement des tolérances de
5 à 10%. Malheureusement, en raison du fil enroulé, ce type de résistance est associé à des effets
inductifs non négligeables.
29
Figure 1.2: Résistance à fil bobtiné [23]
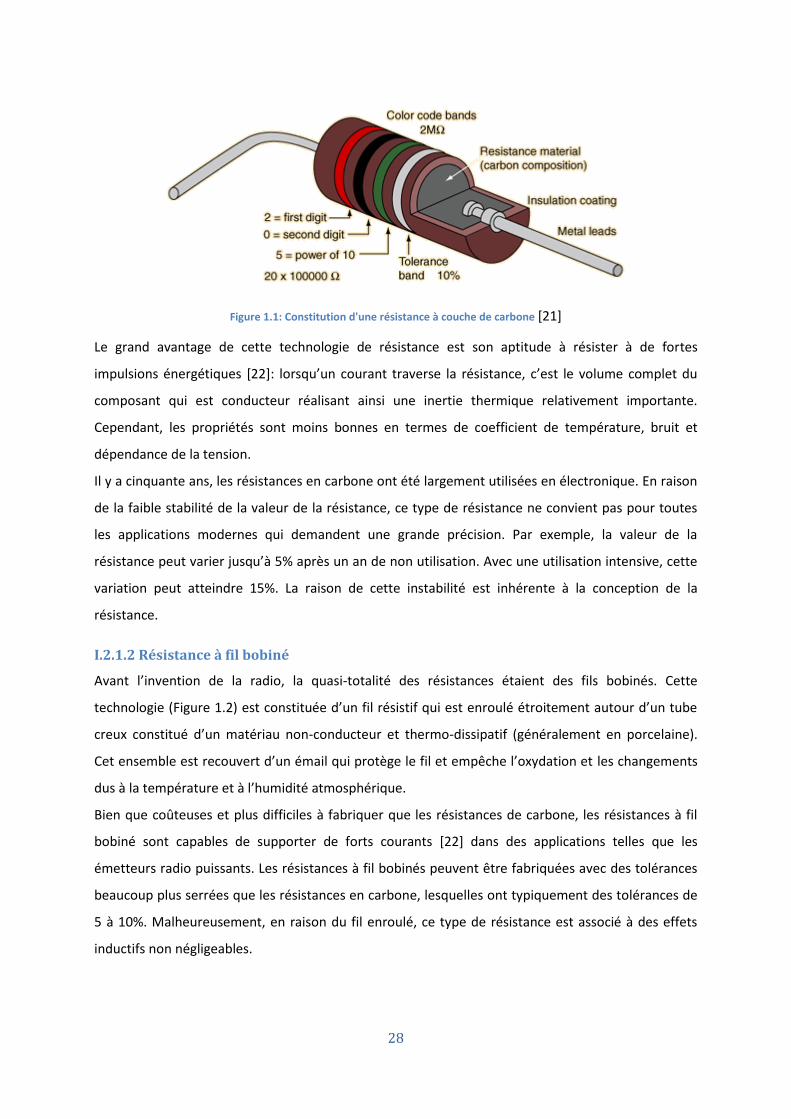
I.2.1.3 Résistance film
Ce type de résistance présenté dans la Figure 1.3 est réalisé par dépôt d’un film métallique mince sur
un substrat isolé. Les connexions sont raccordées aux extrémités du film métallique. Le film
serpentant à la surface du substrat, un effet inductif est observé, cependant bien moindre que dans
le cas d’un fil bobiné. Ces résistances peuvent être fabriquées avec des valeurs très précises.
Figure 1.3: Résistance film métallique [24]
La terminologie « résistance film » fait référence à différentes technologies : les résistances film
carbone, les résistances film métalliques et les résistances film à oxyde métallique [22].
Les résistances à film de carbone sont de faible puissance et sont les plus souvent utilisées. Elles
comportent un noyau en céramique solide revêtu d’un film de carbone ayant des propriétés de
résistance électrique. Le film est en forme d’hélice pour créer un long et étroit chemin résistif. Le
matériau résistif est composé d’argile de carbone, tandis que les conducteurs sont en cuivre étamé.
Un film mince de carbone est déposé sur une petite tige en céramique lors de la fabrication. Les
résistances film de carbone ont été les plus populaires pour les applications de faible puissance selon
un critère de sécurité, compte tenu de leur rayonnement thermique et de leur retard à la
combustion. Elles peuvent supporter aussi des tensions élevées. On retrouve ce type de résistance
dans les alimentations haute tension, radar, rayons X et laser..
Les résistances à film métalliques sont fabriquées à partir de bâtonnets de céramique revêtue de
métal tel qu’un alliage de nickel. Elles sont bien supérieures aux résistances à film de carbone selon
des critères de thermique, de CEM, de linéarité et de précision. Toutefois, ces résistances sont plus
coûteuses que les résistances à film de carbone. Pour ces raisons, les résistances à film métalliques

30
sont utilisées dans les applications où un coefficient de température faible et un bruit faible sont
requis ; par exemple dans les filtres actifs.
Les résistances à film d’oxyde métallique sont similaires aux résistances film métalliques, mais
incorporent un noyau en céramique stable, revêtu d’un oxyde métallique tel que l’oxyde d’étain. Ceci
conduit à une température de fonctionnement supérieure et une plus grande stabilité et une
meilleure fiabilité. Elles sont de petites tailles et peuvent résister à quelques watts étant donné que
l’oxyde métallique ne brûle pas. Par contre, lors du montage de ces résistances, la plus grande
attention est nécessaire car elles émettent de la chaleur. Elles sont utilisées dans des applications
avec des exigences d’endurance élevées.
I.2.2 Condensateurs
Les condensateurs sont indispensables à la réalisation d’un convertisseur. On les retrouve
notamment dans les filtres d’entrée et de sortie, parfois dans le cœur de conversion. Ils sont
également indispensables dans les convertisseurs à résonance et à commutations douces. Un
condensateur est un composant passif qui stocke l’énergie sous forme d’un champ électrique [25].
Dans sa conception la plus simple, un condensateur est constitué de deux plaques conductrices
séparées par un matériau isolant appelé diélectrique. La capacité est directement proportionnelle
aux surfaces des plaques, et est inversement proportionnelle à la distance entre les plaques. La
capacité dépend aussi de la constante diélectrique du matériau séparant les plaques.
La réactance de la capacité est donné en régime sinusoïdal par :
(1.1)
où Xc est la réactance de la capacité, la pulsation angulaire, f la fréquence et C la capacité.
Il existe différents types de condensateurs aux propriétés bien différentes. Il est nécessaire de
comprendre la relation entre propriétés et technologies pour concevoir et dimensionner
correctement un convertisseur. L’existence d’un diélectrique implique des pertes non négligeables ;
cela est généralement modélisé sous la forme d’une « résistance série équivalente » nommée ESR.
L’ESR correspond à l'un des principaux paramètres à considérer lors du choix d’une technologie :
outre les pertes, elle fixe grandement les comportements fréquentiels d’utilisation d’un
condensateur. L’ESR dépend par ailleurs beaucoup de la fréquence et de la température. Un autre
paramètre déterminant pour les caractéristiques fréquentielles est « l’inductance série équivalente »
(ESL-equivalent series inductance) : ce paramètre forme avec la capacité une résonance à 10 kHz avec
certains condensateurs électrolytiques, jusqu’à 100 MHz ou plus avec des puces de type céramique
montées en surface (CMS).
31
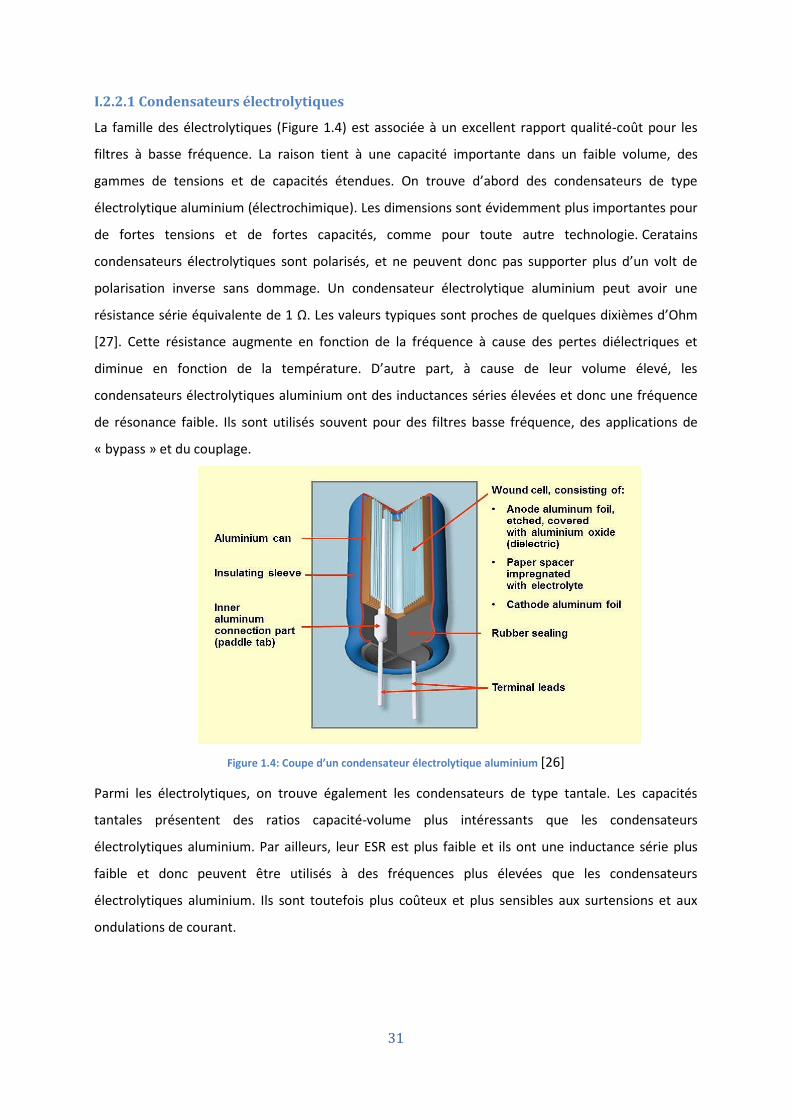
I.2.2.1 Condensateurs électrolytiques
La famille des électrolytiques (Figure 1.4) est associée à un excellent rapport qualité-coût pour les
filtres à basse fréquence. La raison tient à une capacité importante dans un faible volume, des
gammes de tensions et de capacités étendues. On trouve d’abord des condensateurs de type
électrolytique aluminium (électrochimique). Les dimensions sont évidemment plus importantes pour
de fortes tensions et de fortes capacités, comme pour toute autre technologie. Ceratains
condensateurs électrolytiques sont polarisés, et ne peuvent donc pas supporter plus d’un volt de
polarisation inverse sans dommage. Un condensateur électrolytique aluminium peut avoir une
résistance série équivalente de 1 Ω. Les valeurs typiques sont proches de quelques dixièmes d’Ohm
[27]. Cette résistance augmente en fonction de la fréquence à cause des pertes diélectriques et
diminue en fonction de la température. D’autre part, à cause de leur volume élevé, les
condensateurs électrolytiques aluminium ont des inductances séries élevées et donc une fréquence
de résonance faible. Ils sont utilisés souvent pour des filtres basse fréquence, des applications de
« bypass » et du couplage.
Figure 1.4: Coupe d’un condensateur électrolytique aluminium [26]
Parmi les électrolytiques, on trouve également les condensateurs de type tantale. Les capacités
tantales présentent des ratios capacité-volume plus intéressants que les condensateurs
électrolytiques aluminium. Par ailleurs, leur ESR est plus faible et ils ont une inductance série plus
faible et donc peuvent être utilisés à des fréquences plus élevées que les condensateurs
électrolytiques aluminium. Ils sont toutefois plus coûteux et plus sensibles aux surtensions et aux
ondulations de courant.
32
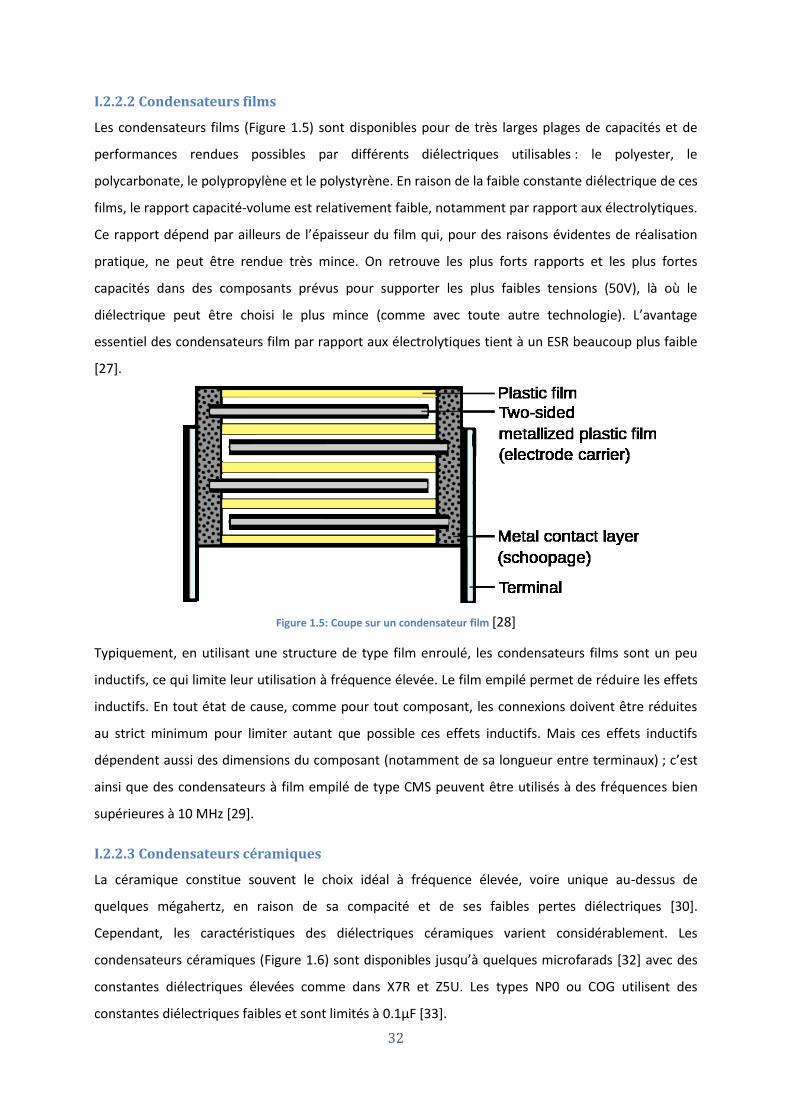
I.2.2.2 Condensateurs films
Les condensateurs films (Figure 1.5) sont disponibles pour de très larges plages de capacités et de
performances rendues possibles par différents diélectriques utilisables : le polyester, le
polycarbonate, le polypropylène et le polystyrène. En raison de la faible constante diélectrique de ces
films, le rapport capacité-volume est relativement faible, notamment par rapport aux électrolytiques.
Ce rapport dépend par ailleurs de l’épaisseur du film qui, pour des raisons évidentes de réalisation
pratique, ne peut être rendue très mince. On retrouve les plus forts rapports et les plus fortes
capacités dans des composants prévus pour supporter les plus faibles tensions (50V), là où le
diélectrique peut être choisi le plus mince (comme avec toute autre technologie). L’avantage
essentiel des condensateurs film par rapport aux électrolytiques tient à un ESR beaucoup plus faible
[27].
Figure 1.5: Coupe sur un condensateur film [28]
Typiquement, en utilisant une structure de type film enroulé, les condensateurs films sont un peu
inductifs, ce qui limite leur utilisation à fréquence élevée. Le film empilé permet de réduire les effets
inductifs. En tout état de cause, comme pour tout composant, les connexions doivent être réduites
au strict minimum pour limiter autant que possible ces effets inductifs. Mais ces effets inductifs
dépendent aussi des dimensions du composant (notamment de sa longueur entre terminaux) ; c’est
ainsi que des condensateurs à film empilé de type CMS peuvent être utilisés à des fréquences bien
supérieures à 10 MHz [29].
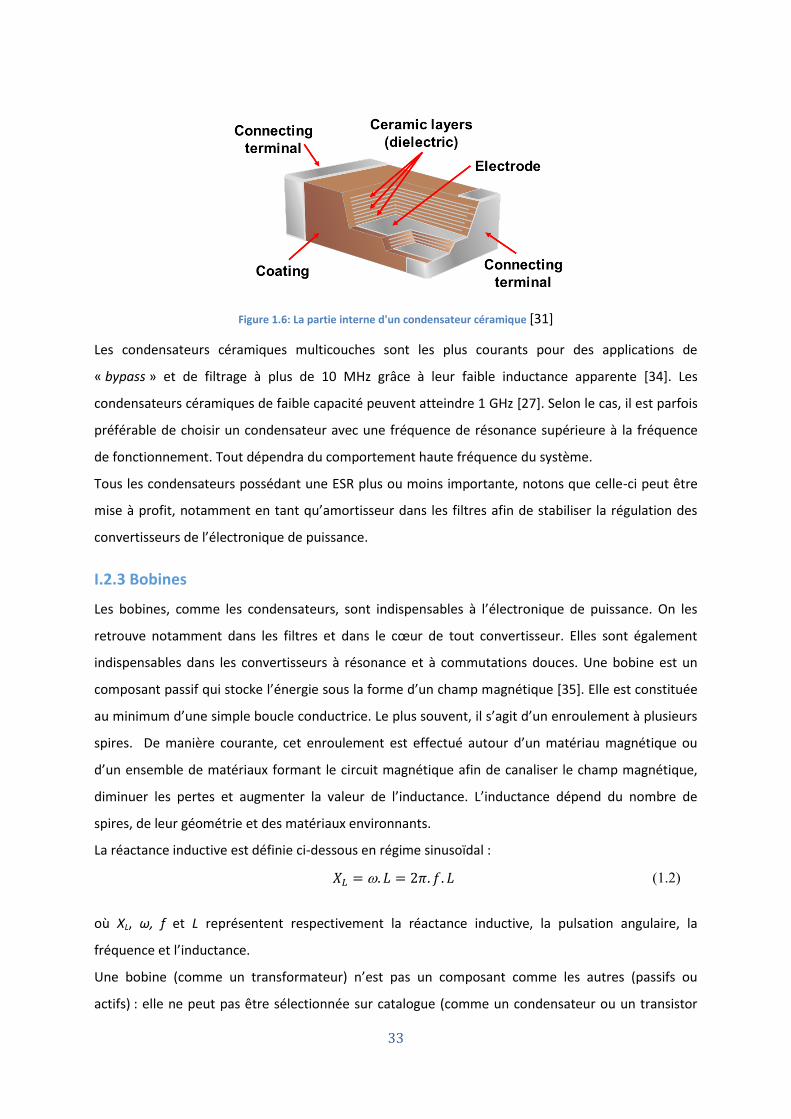
I.2.2.3 Condensateurs céramiques
La céramique constitue souvent le choix idéal à fréquence élevée, voire unique au-dessus de
quelques mégahertz, en raison de sa compacité et de ses faibles pertes diélectriques [30].
Cependant, les caractéristiques des diélectriques céramiques varient considérablement. Les
condensateurs céramiques (Figure 1.6) sont disponibles jusqu’à quelques microfarads [32] avec des
constantes diélectriques élevées comme dans X7R et Z5U. Les types NP0 ou COG utilisent des
constantes diélectriques faibles et sont limités à 0.1µF [33].
33
Figure 1.6: La partie interne d'un condensateur céramique [31]
Les condensateurs céramiques multicouches sont les plus courants pour des applications de
« bypass » et de filtrage à plus de 10 MHz grâce à leur faible inductance apparente [34]. Les
condensateurs céramiques de faible capacité peuvent atteindre 1 GHz [27]. Selon le cas, il est parfois
préférable de choisir un condensateur avec une fréquence de résonance supérieure à la fréquence
de fonctionnement. Tout dépendra du comportement haute fréquence du système.
Tous les condensateurs possédant une ESR plus ou moins importante, notons que celle-ci peut être
mise à profit, notamment en tant qu’amortisseur dans les filtres afin de stabiliser la régulation des
convertisseurs de l’électronique de puissance.
I.2.3 Bobines
Les bobines, comme les condensateurs, sont indispensables à l’électronique de puissance. On les
retrouve notamment dans les filtres et dans le cœur de tout convertisseur. Elles sont également
indispensables dans les convertisseurs à résonance et à commutations douces. Une bobine est un
composant passif qui stocke l’énergie sous la forme d’un champ magnétique [35]. Elle est constituée
au minimum d’une simple boucle conductrice. Le plus souvent, il s’agit d’un enroulement à plusieurs
spires. De manière courante, cet enroulement est effectué autour d’un matériau magnétique ou
d’un ensemble de matériaux formant le circuit magnétique afin de canaliser le champ magnétique,
diminuer les pertes et augmenter la valeur de l’inductance. L’inductance dépend du nombre de
spires, de leur géométrie et des matériaux environnants.
La réactance inductive est définie ci-dessous en régime sinusoïdal :
(1.2)
où XL, ω, f et L représentent respectivement la réactance inductive, la pulsation angulaire, la
fréquence et l’inductance.
Une bobine (comme un transformateur) n’est pas un composant comme les autres (passifs ou
actifs) : elle ne peut pas être sélectionnée sur catalogue (comme un condensateur ou un transistor

34
par exemple). Les inductances sont souvent dimensionnées sur mesure pour de meilleures
performances, en particulier pour des puissances importantes. Ce dimensionnent tient à un trop
grand nombre de paramètres à prendre en compte : la valeur de l’inductance, ses plages d’utilisation
(courant, tension, fréquence), la présence éventuelle d’une composante continue de courant, les
formes d’ondes, l’échauffement et le rayonnement acceptables… Seuls existent des catalogues de
circuits magnétiques (différents matériaux, formes, dimensions…) et de conducteurs électriques
(différents fils, diamètres, isolement…). Une inductance (comme un transformateur) se conçoit donc
en même temps que le convertisseur dans lequel il est prévu de l’implanter. Quelle que soit
l’application de cette inductance, les principaux critères de choix pour le circuit magnétique et le
type de bobinage sont les suivants :
pertes énergétiques et échauffement (tout matériau magnétique et tout conducteur
électrique, comme tout composant, en est le siège) ;
facilité de réalisation et fuites magnétiques (à titre d’exemple, le bobinage d’un tore à faible
perméabilité est coûteux tandis qu’un entrefer provoque des fuites) ;
linéarité et invariance du matériau magnétique (tout matériau magnétique est notamment
saturable ; sa perméabilité n’est donc pas constante et varie avec la température ; ce qui
peut être évité avec l’inductance « à air »).
a. Torique b. Bâtonnet
Figure 1.7: Différents types de bobinage [36]
I.2.3.1 Matériaux magnétiques dédiés à l’électronique de puissance
En règle générale, les matériaux possédant les plus fortes inductions à saturation, donc ceux qui
permettent de minimiser la section du circuit magnétique et le nombre de spires et ainsi d’alléger
une inductance (ou un transformateur), sont malheureusement ceux qui s’échauffent le plus lorsque
la fréquence s’élève. Les matériaux magnétiques peuvent donc être classés suivant leur gamme de
fréquence préférentielle (suivant le meilleur compromis entre pertes et saturation) [37] :
le Fer-Silicium est l’alliage traditionnel des applications à très basse fréquence (limite basse
de l’électronique de puissance)
le Fer-Nickel : circuit coupé avec entrefer; induction à saturation variable suivant le
pourcentage de nickel ;

35
les matériaux amorphes à base de fer : forte induction à saturation mais peu performants en
électronique de puissance à cause des pertes importantes à fréquence élevée ;
les matériaux amorphes à base de cobalt : tore uniquement ; de 50 à 300 kHz environ ;
les matériaux nanocristallins : tore uniquement, induction à saturation élevée, applications à
fréquence assez élevée : 50 à 300 kHz ;
les ferrites Manganèse-Zinc sont les matériaux les plus courants en électronique de
puissance : toutes formes moulés disponibles ; de 20 kHz à 1 MHz environ mais induction à
saturation faible ;
les ferrites Nickel-Zinc : prennent le relai au-delà 1 MHz mais induction à saturation encore
plus faible.
Tout dimensionnement d’inductance doit éviter la saturation du circuit qui se traduirait par un pic de
courant destructeur. Cela se traduit par un volume du circuit magnétique pratiquement
proportionnel à sa perméabilité. La réalisation d’une inductance nécessite donc un circuit
magnétique à faible perméabilité. Une façon de procéder consiste à utiliser un circuit coupé avec
entrefer, ce qui exclut pratiquement les matériaux amorphes et nanocristallins ; ne subsistent en
général que les ferrites. Une autre façon de procéder consiste à utiliser un matériau (non évoqué
plus haut) dit « à faible perméabilité ». Il en existe de toutes sortes, obtenus par moulage d’un
quelconque matériau magnétique sous forme de poudre (fer-nickel, ferrite, fer-carbonyle…) avec un
liant neutre magnétiquement dans des proportions pouvant être quelconques. Tous les matériaux à
faible perméabilité commercialisés se présentent uniquement sous forme de tore pour éviter les
fuites magnétiques (une faible perméabilité implique que le matériau est peu perméable au passage
d’un flux et donc il y a une possibilité de fuites).
I.2.3.2 Bobinages
L’effet de peau s’applique à un conducteur unique dans l’espace ; ce n’est jamais le cas. L’effet de
proximité est provoqué par le champ magnétique créé par un ensemble de conducteurs sur chacun
de ces conducteurs. Un conducteur peut être par exemple une spire de bobinage. L’effet de
proximité se traduit par une répartition très inégale du courant dans la section des conducteurs,
donc par des pertes et un échauffement devenant excessifs à fréquence élevée. Il existe au moins
trois procédés pour limiter l’effet de proximité :
utiliser du fil de Litz : s’il est correctement divisé (diamètre des brins assez faible) et toronné
(chaque toron constitué de trois ou quatre fils ; trois ou quatre torons), alors les courants se
répartissent assez bien dans chaque brin et entre brins ; cela n’évite pas l’effet de proximité
entre brins et entre spires mais repousse sensiblement la fréquence limite d’utilisation [38] ;
utiliser des conducteurs plats de faible épaisseur ;
36
imbriquer les enroulements parcourus par des courants de sens contraires : très efficace
pour les transformateurs, évidemment sans objet pour les inductances.
I.3 Modélisation
Afin de pouvoir résoudre les problèmes CEM et prédire les perturbations électromagnétiques dans
une carte de puissance, il est important de disposer notamment des modèles haute fréquence des
composants passifs. Ces modèles de composants doivent être valides dans la plage de fréquences
150 kHz – 108 MHz afin de couvrir l’ensemble de la norme des émissions conduites CISPR25.
La modélisation commence par le choix d’un modèle électrique équivalent de notre composant, puis
la détermination des paramètres du modèle afin que ce dernier corresponde à un comportement
physique mesurable ou vérifiable. Ces modèles de composants doivent être compatibles avec des
simulateurs électriques de type SPICE. Les modèles développés dans ces travaux sont de deux types :
des modèles analytiques, basés sur les propriétés géométriques et physiques du composant
mais limités par leur domaine de validité comme nous le verrons dans ce chapitre ;
des modèles basés sur la mesure et précis dans une large bande de fréquence.
I.3.1 Modèles Analytiques
Les modèles analytiques sont des modèles entièrement décrits à l’aide d’équations mathématiques
exactes. Ils sont basés sur la connaissance des propriétés physiques et géométriques du composant
en question. Dans le cadre de nos travaux de thèse, ce type de modèle a été développé pour deux
catégories de composants différents : le solénoïde et le condensateur céramique multicouches qu’on
trouve souvent dans les filtres passifs. Nous détaillons ici l’établissement de ces modèles.
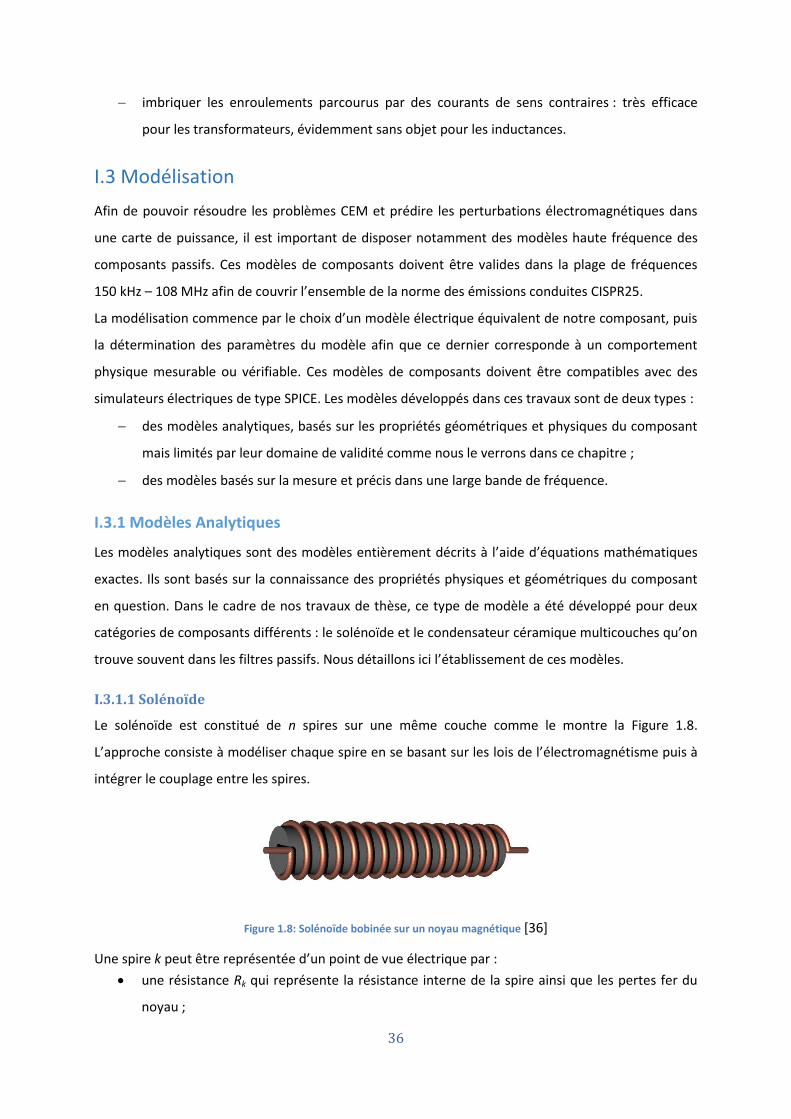
I.3.1.1 Solénoïde
Le solénoïde est constitué de n spires sur une même couche comme le montre la Figure 1.8.
L’approche consiste à modéliser chaque spire en se basant sur les lois de l’électromagnétisme puis à
intégrer le couplage entre les spires.
Figure 1.8: Solénoïde bobinée sur un noyau magnétique [36]
Une spire k peut être représentée d’un point de vue électrique par :
une résistance Rk qui représente la résistance interne de la spire ainsi que les pertes fer du
noyau ;
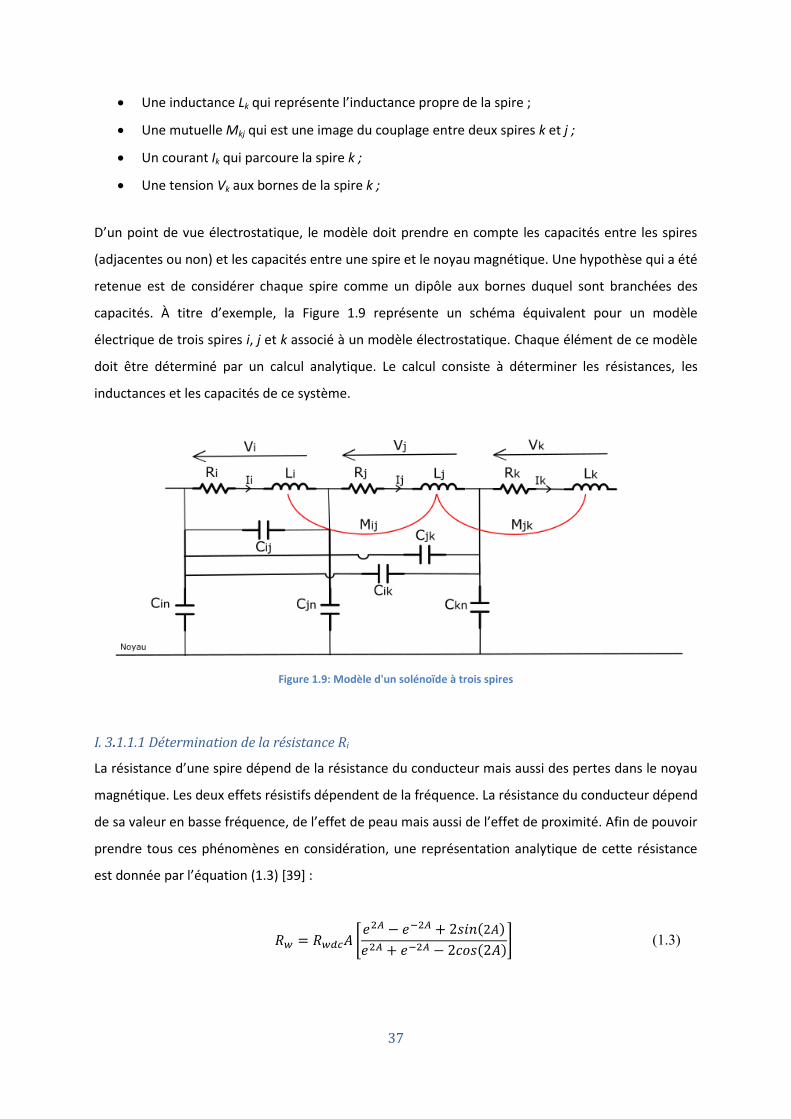
37
Une inductance Lk qui représente l’inductance propre de la spire ;
Une mutuelle Mkj qui est une image du couplage entre deux spires k et j ;
Un courant Ik qui parcoure la spire k ;
Une tension Vk aux bornes de la spire k ;
D’un point de vue électrostatique, le modèle doit prendre en compte les capacités entre les spires
(adjacentes ou non) et les capacités entre une spire et le noyau magnétique. Une hypothèse qui a été
retenue est de considérer chaque spire comme un dipôle aux bornes duquel sont branchées des
capacités. À titre d’exemple, la Figure 1.9 représente un schéma équivalent pour un modèle
électrique de trois spires i, j et k associé à un modèle électrostatique. Chaque élément de ce modèle
doit être déterminé par un calcul analytique. Le calcul consiste à déterminer les résistances, les
inductances et les capacités de ce système.
Figure 1.9: Modèle d'un solénoïde à trois spires
I. 3.1.1.1 Détermination de la résistance Ri
La résistance d’une spire dépend de la résistance du conducteur mais aussi des pertes dans le noyau
magnétique. Les deux effets résistifs dépendent de la fréquence. La résistance du conducteur dépend
de sa valeur en basse fréquence, de l’effet de peau mais aussi de l’effet de proximité. Afin de pouvoir
prendre tous ces phénomènes en considération, une représentation analytique de cette résistance
est donnée par l’équation (1.3) [39] :
(1.3)
38
La variable Rwdc représente la résistance du conducteur en basse fréquence. Pour une spire de section
circulaire, A est une variable donnée par l’expression (1.4) [39] :
(1.4)
où d est le diamètre du cuivre, δ l’épaisseur de peau et t la distance entre deux spires adjacentes.
L’expression de la résistance Rwdc dépend quant à elle de la longueur de la spire lspire ainsi que de la
section du conducteur Scond :
(1.5)
où ρw est la résistivité électrique du conducteur et Ray est le rayon de la spire. L’épaisseur de peau
dans notre conducteur est donnée par l’expression (1.6) [39] :
(1.6)
D’autre part, les pertes dans le noyau magnétique dépendent de la fréquence et peuvent être
modélisées en faisant appel aux notions de perméabilité et de permittivité complexes de ce même
noyau. La perméabilité complexe reflète les pertes par hystérésis dans le noyau magnétique :
(1.7)
où est la perméabilité complexe du noyau, µ0 celle de l’air, et
respectivement les parties
réelle et imaginaire de la perméabilité relative et la perméabilité relative complexe.
Les pertes diélectriques du noyau sont reliées à la permittivité électrique qui est aussi une fonction
de la fréquence :
(1.8)
où est la permittivité complexe du noyau, ε0 celle de l’air, et
respectivement les parties
réelle et imaginaire de la permittivité relative et la permittivité relative complexe.
En utilisant les définitions précédentes, il est possible de déterminer la résistance équivalente
justifiée par les pertes dans le noyau présentée dans (1.9) [39] :
(1.9)
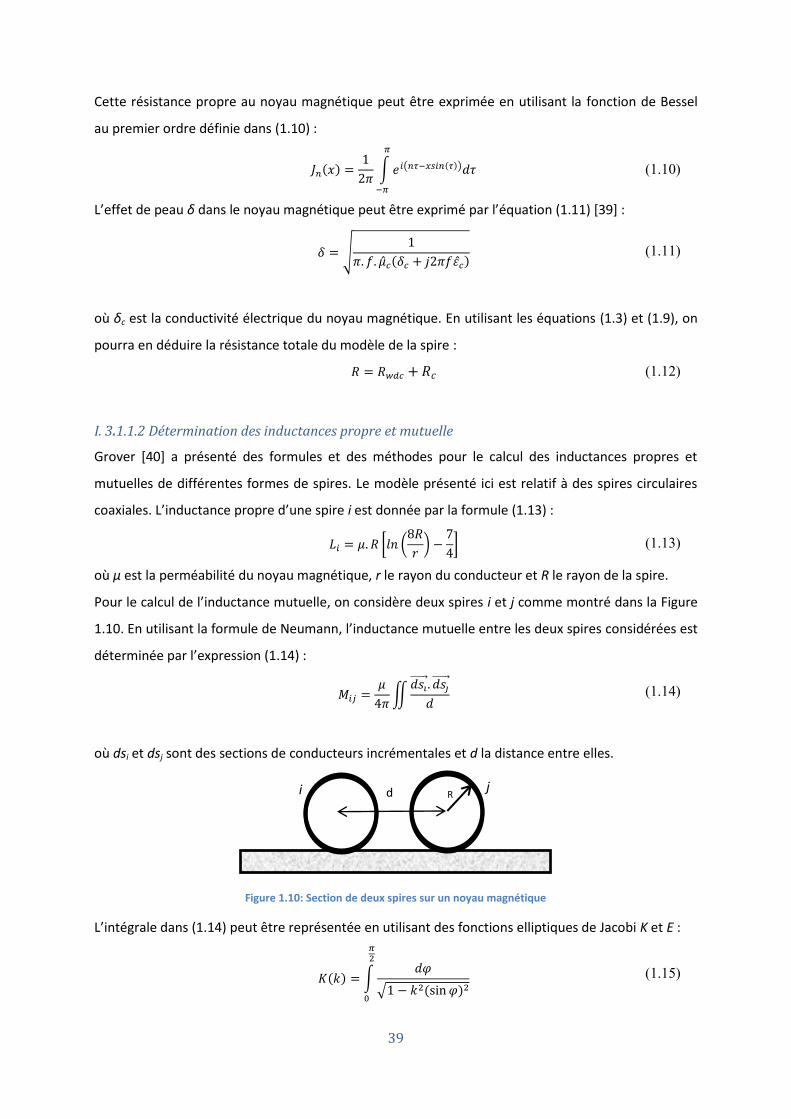
39
Cette résistance propre au noyau magnétique peut être exprimée en utilisant la fonction de Bessel
au premier ordre définie dans (1.10) :
(1.10)
L’effet de peau δ dans le noyau magnétique peut être exprimé par l’équation (1.11) [39] :
(1.11)
où δc est la conductivité électrique du noyau magnétique. En utilisant les équations (1.3) et (1.9), on
pourra en déduire la résistance totale du modèle de la spire :
(1.12)
I. 3.1.1.2 Détermination des inductances propre et mutuelle
Grover [40] a présenté des formules et des méthodes pour le calcul des inductances propres et
mutuelles de différentes formes de spires. Le modèle présenté ici est relatif à des spires circulaires
coaxiales. L’inductance propre d’une spire i est donnée par la formule (1.13) :
(1.13)
où µ est la perméabilité du noyau magnétique, r le rayon du conducteur et R le rayon de la spire.
Pour le calcul de l’inductance mutuelle, on considère deux spires i et j comme montré dans la Figure
1.10. En utilisant la formule de Neumann, l’inductance mutuelle entre les deux spires considérées est
déterminée par l’expression (1.14) :
(1.14)
où dsi et dsj sont des sections de conducteurs incrémentales et d la distance entre elles.
Figure 1.10: Section de deux spires sur un noyau magnétique
L’intégrale dans (1.14) peut être représentée en utilisant des fonctions elliptiques de Jacobi K et E :
(1.15)
R
d i j

40
(1.16)
À partir de ces fonctions elliptiques, l’inductance mutuelle entre les spires i et j peut être
déterminée [41] :
(1.17)
où a, b et β sont déterminés par :
(1.18)
(1.19)
(1.20)
Afin de modéliser la partie électromagnétique d’un solénoïde de n spires, il est nécessaire de
déterminer l’inductance propre de chaque spire et les inductances mutuelles entre la spire
considérée et toutes les autres spires du système. En connaissant toutes les inductances du modèle,
on pourra en déduire l’inductance totale du solénoïde [42] :
(1.21)
Cette information donne une image satisfaisante du comportement du solénoïde aux fréquences
inférieures à la première fréquence de résonance, pour lesquelles les capacités parasites sont
négligeables.
En se basant sur les équations (1.13) et (1.14), on constate que les inductances propres et mutuelles
dépendent de la perméabilité du noyau magnétique. Dans le cas d’un solénoïde bobiné sur un
barreau rectiligne, le champ magnétique circule en dehors du noyau et ferme son circuit à travers
l’air. Cela affecte la perméabilité effective du noyau. Le champ magnétique étant présent dans deux
milieux de perméabilités relatives différentes, la perméabilité du milieu équivalent doit prendre en
considération les deux milieux et la géométrie du composant. On parle alors de « perméabilité
effective ». Pour déterminer la valeur de cette perméabilité effective, l’abaque [43] de la Figure 1.11
a été utilisé.

41
Figure 1.11: Abaque de la perméabilité effective du solénoïde[43]
²Cet abaque permet de déterminer la perméabilité relative en fonction de la longueur du noyau et de
son diamètre. Il est paramétré par la perméabilité relative du noyau. L’influence du remplissage du
solénoïde a un effet important sur la valeur de la perméabilité effective. En effet, si Lr est la longueur
du solénoïde et lc la longueur totale du bobinage, (1.22) donne la relation entre la perméabilité
effective du solénoïde bobine µe’ et celle de l’abaque µe [44][45].
(1.22)
I. 3.1.1.3 Détermination des capacités
Dans un solénoïde, un couplage capacitif est présent entre les spires, mais aussi entre chaque spire
et le noyau magnétique. L’impédance de la capacité est inversement proportionnelle à la fréquence.
En basse fréquence, cette impédance peut être négligée par rapport à l’inductance dont l’impédance
est directement proportionnelle à la fréquence. Afin de modéliser le solénoïde en haute fréquence, il
est important de déterminer la valeur de ces capacités.
Dans [46], A. Massarini a proposé une méthode pour calculer ces capacités en se basant sur les lignes
du champ électrique. Considérant deux conducteurs comme dans la Figure 1.12 , le champ électrique
entre ces conducteurs est présent dans l’isolant (dCttc) ainsi que dans l’air (dCg) entourant les
conducteurs.
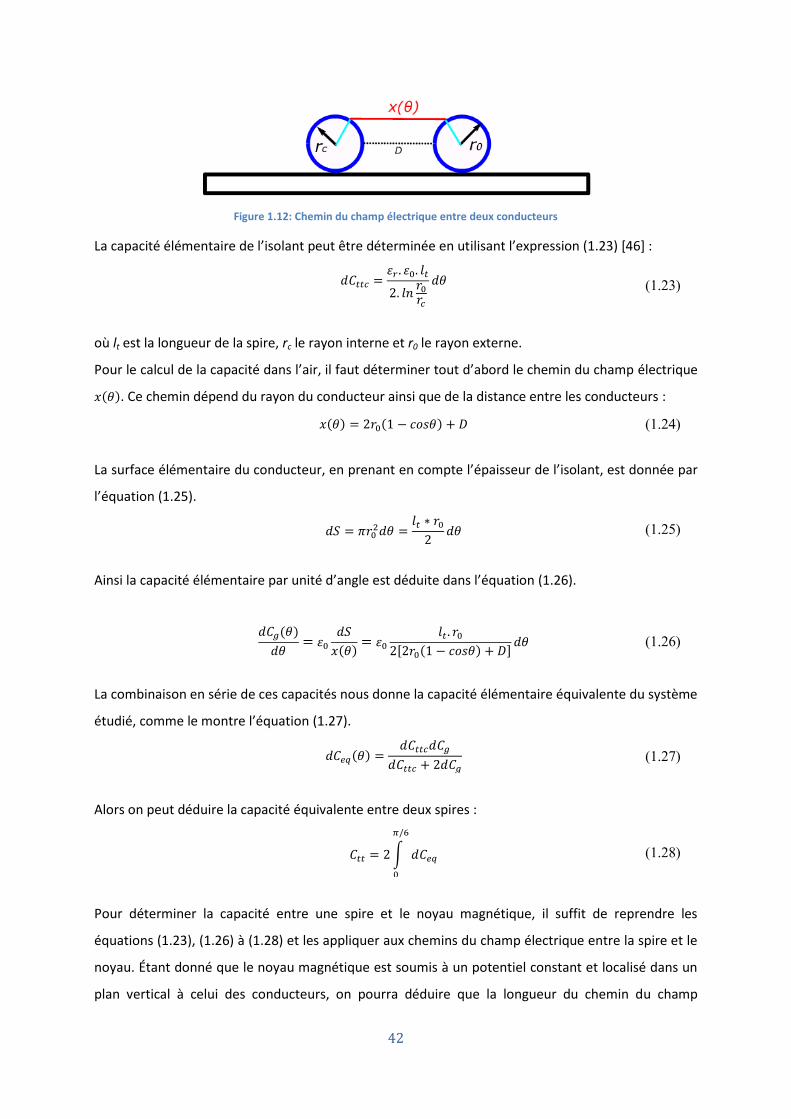
42
Figure 1.12: Chemin du champ électrique entre deux conducteurs
La capacité élémentaire de l’isolant peut être déterminée en utilisant l’expression (1.23) [46] :
(1.23)
où lt est la longueur de la spire, rc le rayon interne et r0 le rayon externe.
Pour le calcul de la capacité dans l’air, il faut déterminer tout d’abord le chemin du champ électrique
. Ce chemin dépend du rayon du conducteur ainsi que de la distance entre les conducteurs :
(1.24)
La surface élémentaire du conducteur, en prenant en compte l’épaisseur de l’isolant, est donnée par
l’équation (1.25).
(1.25)
Ainsi la capacité élémentaire par unité d’angle est déduite dans l’équation (1.26).
(1.26)
La combinaison en série de ces capacités nous donne la capacité élémentaire équivalente du système
étudié, comme le montre l’équation (1.27).
(1.27)
Alors on peut déduire la capacité équivalente entre deux spires :
(1.28)
Pour déterminer la capacité entre une spire et le noyau magnétique, il suffit de reprendre les
équations (1.23), (1.26) à (1.28) et les appliquer aux chemins du champ électrique entre la spire et le
noyau. Étant donné que le noyau magnétique est soumis à un potentiel constant et localisé dans un
plan vertical à celui des conducteurs, on pourra déduire que la longueur du chemin du champ
43
électrique dans l’air entre une spire et un noyau est la moitié de celle entre deux spires. En
conclusion, vu que la capacité est inversement proportionnelle au chemin, on obtiendra l’équation
(1.29).
(1.29)
En utilisant (1.28) et (1.29), on pourra calculer toutes les capacités parasites du système qu’il s’agisse
des capacités entre spires ou bien des capacités entre spire et noyau.
I. 3.1.1.4 Validation Expérimentale
Afin de valider notre modèle, on a réalisé au laboratoire un solénoïde de 31 spires afin de pouvoir
comparer l’impédance de notre modèle à celle de la réalité. La Figure 1.13 montre un solénoïde
réalisé au sein de notre laboratoire.
Figure 1.13: Solénoïde réalisé au laboratoire
Le solénoïde en question est composé d’une seule couche de conducteur sur un noyau en ferrite. Les
caractéristiques géométriques et physiques sont présentées dans le tableau ci-dessous :
Tableau 1: Caractéristiques du solénoïde
Variable Symbole Valeur Unité
Rayon du solenoid (noyau) R 15 mm
Rayon du conducteur r 0,25 mm
Distance entre 2 spires adjointes e 0,54 mm
Nombre de tours n 31 -
Perméabilité relative effective du
noyau µreff 4,3 -
Afin de mesurer l’impédance du solénoïde, un analyseur de réseau est utilisé [47]. L’utilisation de cet
appareil est expliquée dans la partie suivante. Les Figure 1.14 et Figure 1.15 comparent le module et
la phase d’impédance du modèle aux valeurs mesurées.
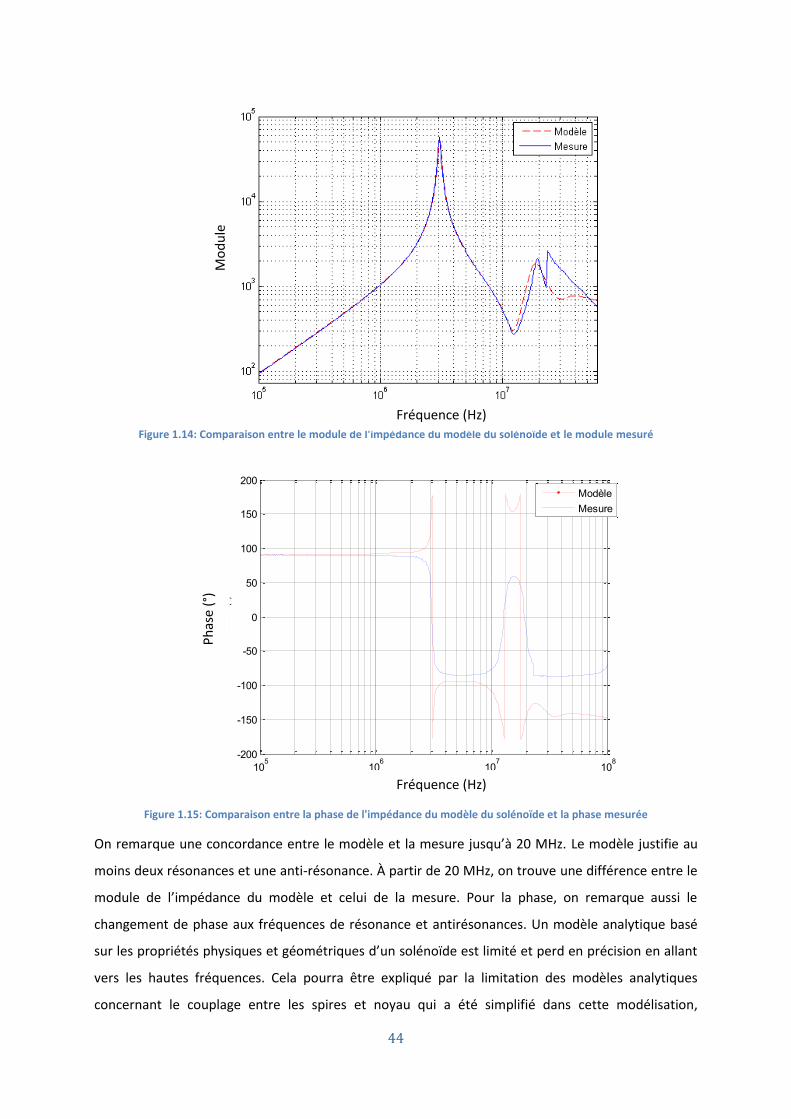
44
Figure 1.14: Comparaison entre le module de l'impédance du modèle du solénoïde et le module mesuré
Figure 1.15: Comparaison entre la phase de l'impédance du modèle du solénoïde et la phase mesurée
On remarque une concordance entre le modèle et la mesure jusqu’à 20 MHz. Le modèle justifie au
moins deux résonances et une anti-résonance. À partir de 20 MHz, on trouve une différence entre le
module de l’impédance du modèle et celui de la mesure. Pour la phase, on remarque aussi le
changement de phase aux fréquences de résonance et antirésonances. Un modèle analytique basé
sur les propriétés physiques et géométriques d’un solénoïde est limité et perd en précision en allant
vers les hautes fréquences. Cela pourra être expliqué par la limitation des modèles analytiques
concernant le couplage entre les spires et noyau qui a été simplifié dans cette modélisation,
105
106
107
108
-200
-150
-100
-50
0
50
100
150
200
Fréquence (Hz)
Phase (
°)
Modèle
Mesure
Mo
du
le
Fréquence (Hz)
Ph
ase
(°)
Fréquence (Hz)
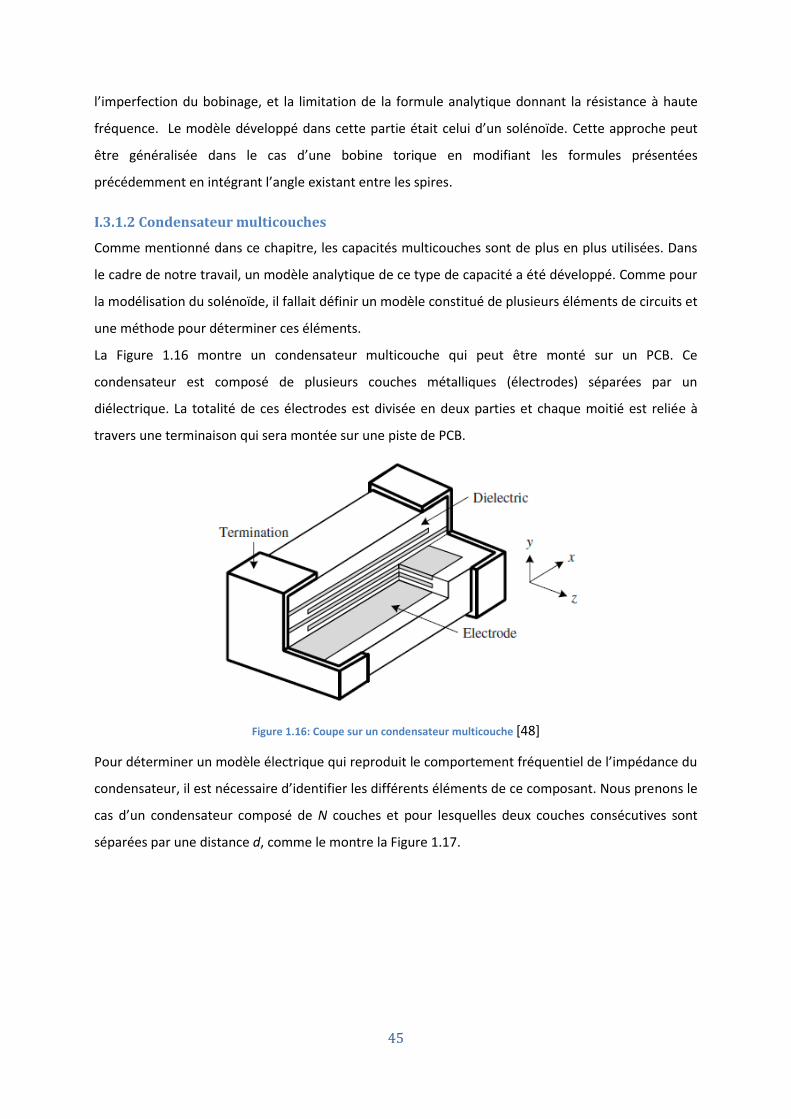
45
l’imperfection du bobinage, et la limitation de la formule analytique donnant la résistance à haute
fréquence. Le modèle développé dans cette partie était celui d’un solénoïde. Cette approche peut
être généralisée dans le cas d’une bobine torique en modifiant les formules présentées
précédemment en intégrant l’angle existant entre les spires.
I.3.1.2 Condensateur multicouches
Comme mentionné dans ce chapitre, les capacités multicouches sont de plus en plus utilisées. Dans
le cadre de notre travail, un modèle analytique de ce type de capacité a été développé. Comme pour
la modélisation du solénoïde, il fallait définir un modèle constitué de plusieurs éléments de circuits et
une méthode pour déterminer ces éléments.
La Figure 1.16 montre un condensateur multicouche qui peut être monté sur un PCB. Ce
condensateur est composé de plusieurs couches métalliques (électrodes) séparées par un
diélectrique. La totalité de ces électrodes est divisée en deux parties et chaque moitié est reliée à
travers une terminaison qui sera montée sur une piste de PCB.
Figure 1.16: Coupe sur un condensateur multicouche [48]
Pour déterminer un modèle électrique qui reproduit le comportement fréquentiel de l’impédance du
condensateur, il est nécessaire d’identifier les différents éléments de ce composant. Nous prenons le
cas d’un condensateur composé de N couches et pour lesquelles deux couches consécutives sont
séparées par une distance d, comme le montre la Figure 1.17.
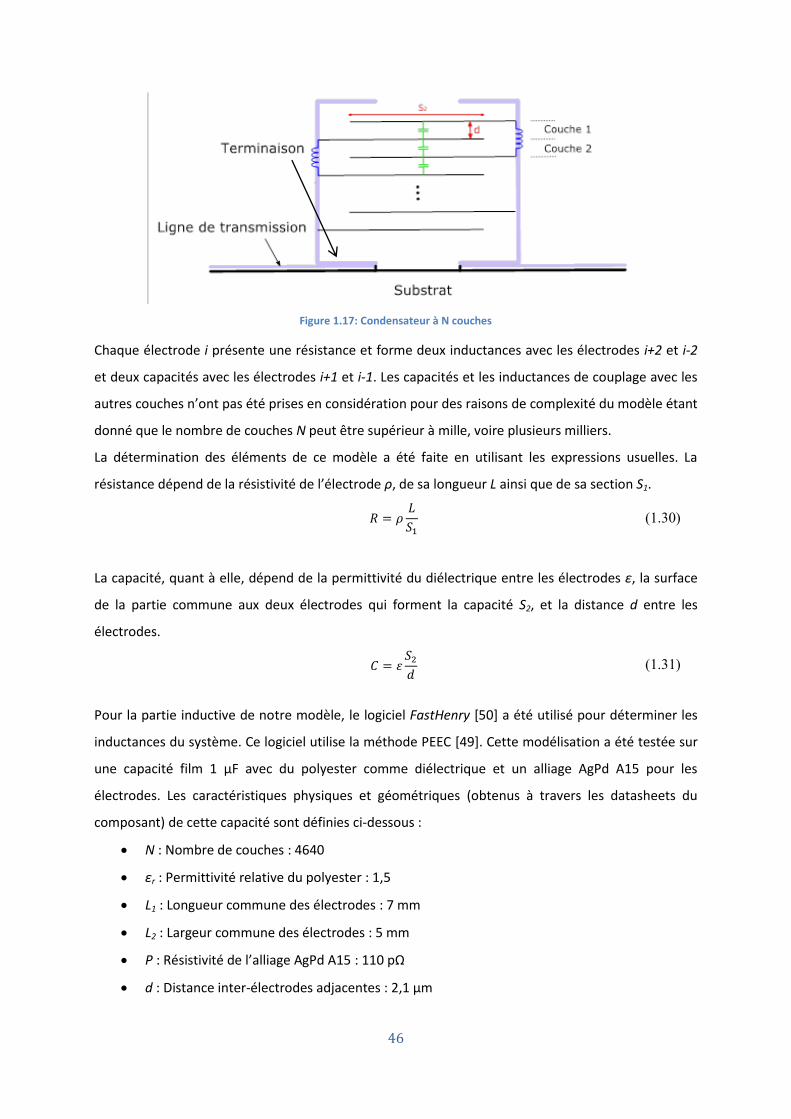
46
Figure 1.17: Condensateur à N couches
Chaque électrode i présente une résistance et forme deux inductances avec les électrodes i+2 et i-2
et deux capacités avec les électrodes i+1 et i-1. Les capacités et les inductances de couplage avec les
autres couches n’ont pas été prises en considération pour des raisons de complexité du modèle étant
donné que le nombre de couches N peut être supérieur à mille, voire plusieurs milliers.
La détermination des éléments de ce modèle a été faite en utilisant les expressions usuelles. La
résistance dépend de la résistivité de l’électrode ρ, de sa longueur L ainsi que de sa section S1.
(1.30)
La capacité, quant à elle, dépend de la permittivité du diélectrique entre les électrodes ε, la surface
de la partie commune aux deux électrodes qui forment la capacité S2, et la distance d entre les
électrodes.
(1.31)
Pour la partie inductive de notre modèle, le logiciel FastHenry [50] a été utilisé pour déterminer les
inductances du système. Ce logiciel utilise la méthode PEEC [49]. Cette modélisation a été testée sur
une capacité film 1 µF avec du polyester comme diélectrique et un alliage AgPd A15 pour les
électrodes. Les caractéristiques physiques et géométriques (obtenus à travers les datasheets du
composant) de cette capacité sont définies ci-dessous :
N : Nombre de couches : 4640
εr : Permittivité relative du polyester : 1,5
L1 : Longueur commune des électrodes : 7 mm
L2 : Largeur commune des électrodes : 5 mm
Ρ : Résistivité de l’alliage AgPd A15 : 110 pΩ
d : Distance inter-électrodes adjacentes : 2,1 µm
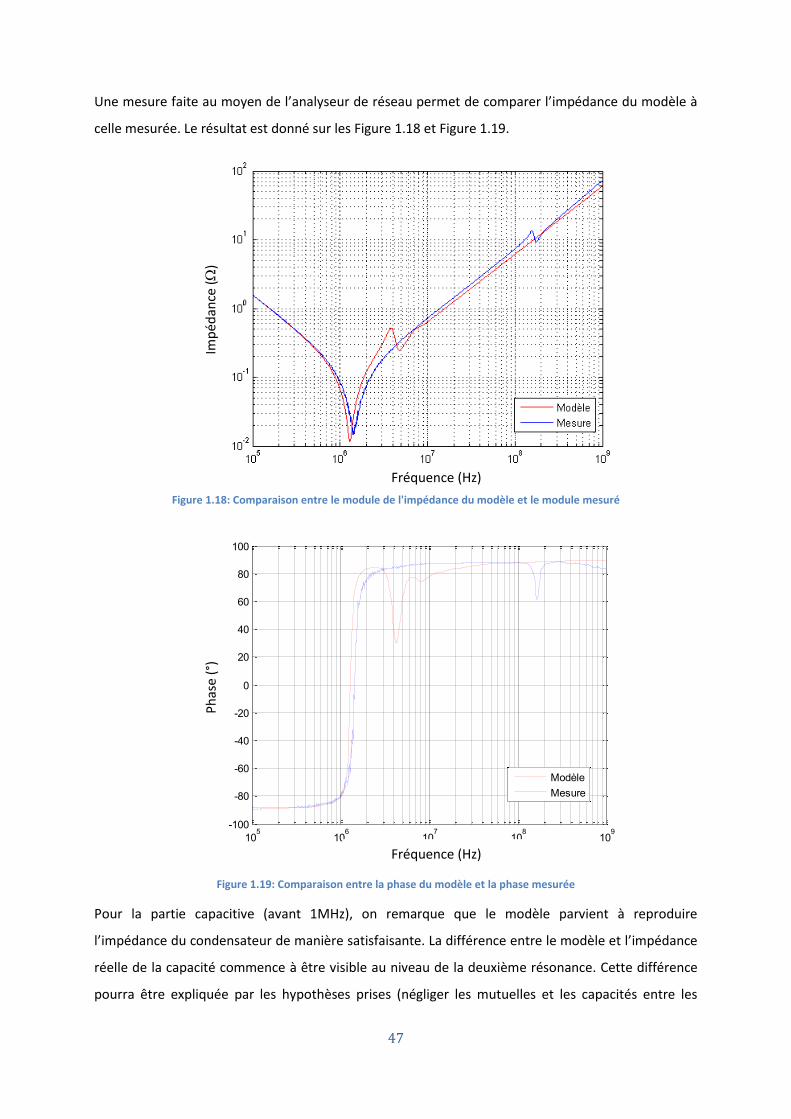
47
Une mesure faite au moyen de l’analyseur de réseau permet de comparer l’impédance du modèle à
celle mesurée. Le résultat est donné sur les Figure 1.18 et Figure 1.19.
Figure 1.18: Comparaison entre le module de l'impédance du modèle et le module mesuré
Figure 1.19: Comparaison entre la phase du modèle et la phase mesurée
Pour la partie capacitive (avant 1MHz), on remarque que le modèle parvient à reproduire
l’impédance du condensateur de manière satisfaisante. La différence entre le modèle et l’impédance
réelle de la capacité commence à être visible au niveau de la deuxième résonance. Cette différence
pourra être expliquée par les hypothèses prises (négliger les mutuelles et les capacités entre les
105
106
107
108
109
-100
-80
-60
-40
-20
0
20
40
60
80
100
Fréquence (Hz)
Phase (
°)
Modèle
Mesure
Imp
édan
ce (
)
Fréquence (Hz)
Ph
ase
(°)
Fréquence (Hz)
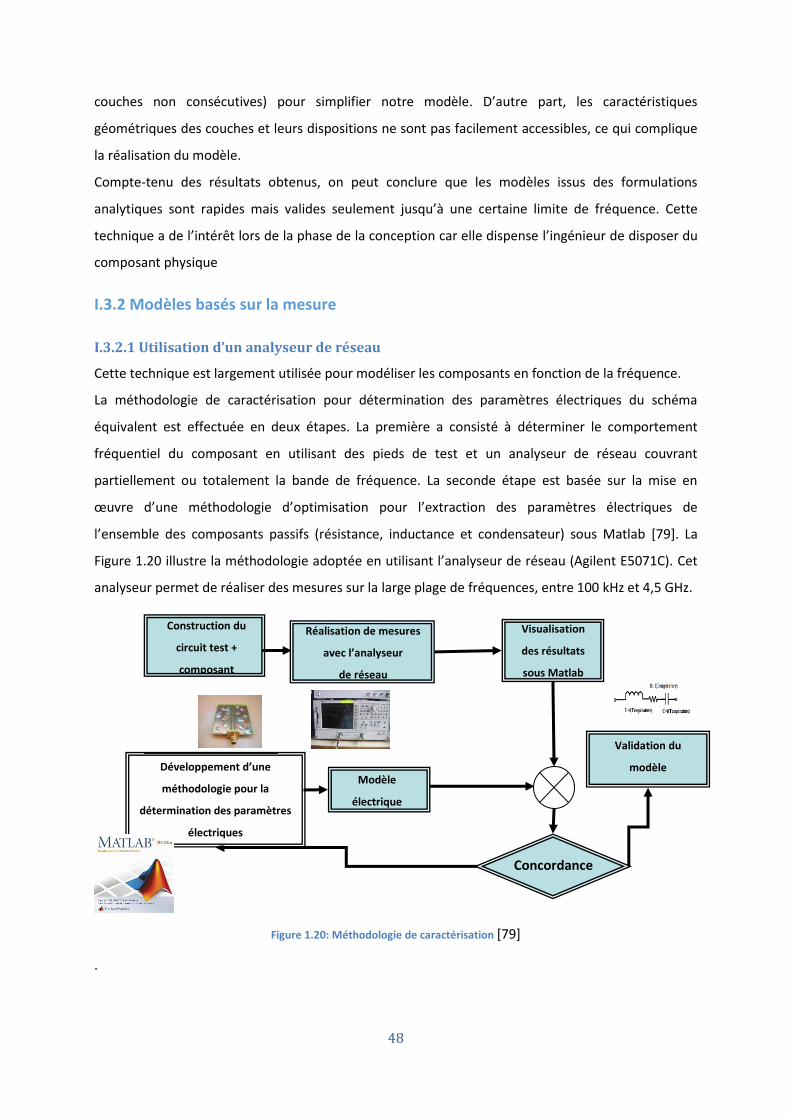
48
couches non consécutives) pour simplifier notre modèle. D’autre part, les caractéristiques
géométriques des couches et leurs dispositions ne sont pas facilement accessibles, ce qui complique
la réalisation du modèle.
Compte-tenu des résultats obtenus, on peut conclure que les modèles issus des formulations
analytiques sont rapides mais valides seulement jusqu’à une certaine limite de fréquence. Cette
technique a de l’intérêt lors de la phase de la conception car elle dispense l’ingénieur de disposer du
composant physique
I.3.2 Modèles basés sur la mesure
I.3.2.1 Utilisation d’un analyseur de réseau
Cette technique est largement utilisée pour modéliser les composants en fonction de la fréquence.
La méthodologie de caractérisation pour détermination des paramètres électriques du schéma
équivalent est effectuée en deux étapes. La première a consisté à déterminer le comportement
fréquentiel du composant en utilisant des pieds de test et un analyseur de réseau couvrant
partiellement ou totalement la bande de fréquence. La seconde étape est basée sur la mise en
œuvre d’une méthodologie d’optimisation pour l’extraction des paramètres électriques de
l’ensemble des composants passifs (résistance, inductance et condensateur) sous Matlab [79]. La
Figure 1.20 illustre la méthodologie adoptée en utilisant l’analyseur de réseau (Agilent E5071C). Cet
analyseur permet de réaliser des mesures sur la large plage de fréquences, entre 100 kHz et 4,5 GHz.
Figure 1.20: Méthodologie de caractérisation [79]
.
Validation du
modèle
Réalisation de mesures
avec l’analyseur
de réseau
Modèle
électrique
Visualisation
des résultats
sous Matlab
Concordance
Construction du
circuit test +
composant
Développement d’une
méthodologie pour la
détermination des paramètres
électriques
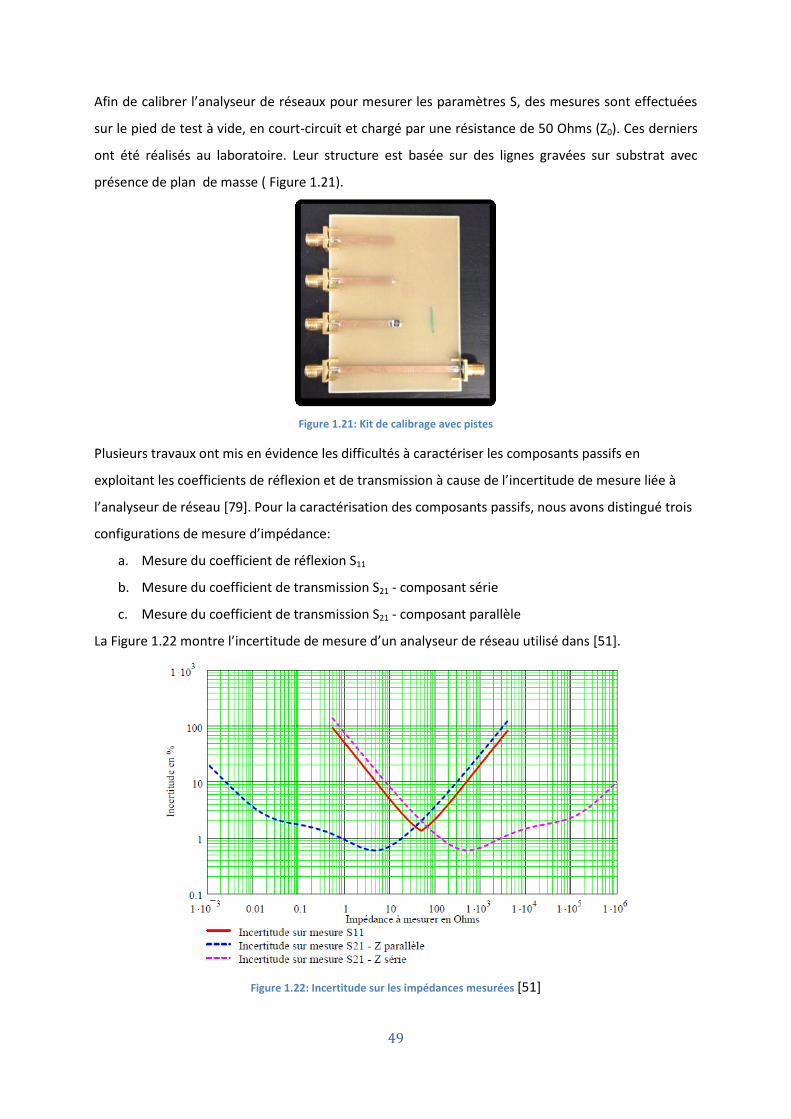
49
Afin de calibrer l’analyseur de réseaux pour mesurer les paramètres S, des mesures sont effectuées
sur le pied de test à vide, en court-circuit et chargé par une résistance de 50 Ohms (Z0). Ces derniers
ont été réalisés au laboratoire. Leur structure est basée sur des lignes gravées sur substrat avec
présence de plan de masse ( Figure 1.21).
Figure 1.21: Kit de calibrage avec pistes
Plusieurs travaux ont mis en évidence les difficultés à caractériser les composants passifs en
exploitant les coefficients de réflexion et de transmission à cause de l’incertitude de mesure liée à
l’analyseur de réseau [79]. Pour la caractérisation des composants passifs, nous avons distingué trois
configurations de mesure d’impédance:
a. Mesure du coefficient de réflexion S11
b. Mesure du coefficient de transmission S21 - composant série
c. Mesure du coefficient de transmission S21 - composant parallèle
La Figure 1.22 montre l’incertitude de mesure d’un analyseur de réseau utilisé dans [51].
Figure 1.22: Incertitude sur les impédances mesurées [51]

50
Nous allons présenter les cas d’usage de chacune des méthodes. Le choix de la méthode dépend de
la précision de la mesure par rapport à l’impédance du composant :
La mesure du coefficient de réflexion S11 minimise l’imprécision pour des impédances
proches de 50 Ω
La mesure du coefficient de transmission S21 (composant série) minimise l’imprécision pour
des impédances inférieures à 50 Ω
La mesure du coefficient de transmission S21 (composant parallèle) minimise
l’imprécision pour des impédances supérieures à 50 Ω
Connaissant l’impédance des composants passifs et leurs variations fréquentielles, il nous faut donc
au moins deux mesures pour avoir l’impédance sur toute la plage de fréquence concernée. En
effectuant les mesures de coefficient de transmission dans les deux cas, nous pourrons couvrir une
plage d’impédance suffisante. Plus précisément, on identifiera (avec un script) les fréquences
correspondantes aux impédances inférieures à 50 Ω dans la mesure du coefficient de transmission
(composant série), les fréquences correspondantes aux impédances supérieures à 50 Ω dans la
mesure du coefficient de transmission (composant parallèle) et on les combine afin d’avoir une
mesure précise qui couvre toute la plage de fréquence étudiée.
I.3.2.1.1 Mesure du coefficient de réflexion S11
Cette configuration n’implique l’utilisation que d’une seule voie de l’analyseur de réseau. L’analyseur
envoie un signal vers le composant qui se réfléchit et revient sur la même borne. La comparaison
entre le signal envoyé et réfléchi permet de calculer le coefficient de réflexion S11. La Figure 1.23
présente un circuit équivalent de cette configuration de mesure.
Figure 1.23: Configuration de mesure du coefficient de réflexion
L’impédance peut être obtenue en utilisant le coefficient de réflexion par la relation suivante (voir
Annexe A) :
(1.32)
Avec Z0 l’impédance caractéristique de l’analyseur de réseau (50 Ω) et Z l’impédance à mesurer.

51
En utilisant la relation (1.32), on pourra remarquer que pour des impédances Z très petites ou très
élevées, le coefficient de réflexion S11 converge vers une constante (-1 ou 1) ce qui confirme les
résultats de la Figure 1.22. Une petite variation de S11 pour un de ces derniers cas peut aboutir à une
grosse variation d’impédance. Il est préférable d’éviter ce risque qui peut arriver suite au bruit de
l’appareil ou de l’environnement. Pour cette raison, ce type de mesure n’est précis que pour des
impédances proches de Z0 et donc 50 Ω.
Dans le cas des composants de faible ou de forte impédance, la méthodologie basée sur la méthode
d’extraction du paramètre de réflexion S11 n’est plus valide. En effet, on s’est rendu rapidement à
l’évidence qu’entre les valeurs relevées et les valeurs théoriques, il existe des écarts importants. Pour
surmonter cette difficulté, deux types de mesures de coefficient de transmission sont proposées. Le
choix de la technique de la mesure dépend du composant.
I.3.2.1.2 Mesure du coefficient de transmission S21 – composant série
Cette configuration utilise les deux voies de l’analyseur de réseau, une pour la source du signal et
l’autre pour la réception du signal. Le composant est mis en série avec les deux voies de l’analyseur.
La Figure 1.24 présente le circuit équivalent correspondant à la configuration concernée.
Figure 1.24: Configuration de mesure du coefficient de transmission – Composant série
Comme le cas précédent, nous pourrons utiliser les paramètres S pour en déduire l’impédance du
composant en fonction de la fréquence :
(1.33)
S21 converge vers 1 pour les valeurs très petites de Z et pour les mêmes raisons déjà expliquées
auparavant, ce type de mesure n’est précis que pour des impédances supérieures à Z0.
I.3.2.1.3 Mesure du coefficient de transmission S21 – composant parallèle
Dans cette configuration, le composant est placé en parallèle comme montre la Figure 1.25.
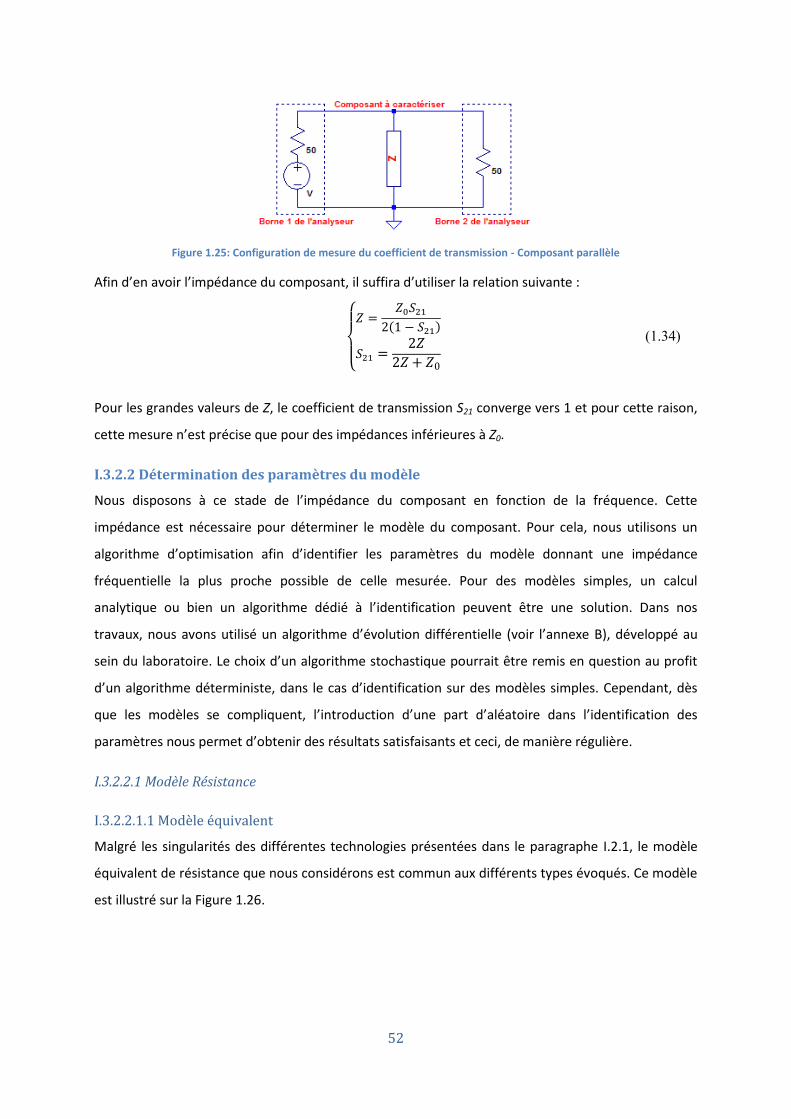
52
Figure 1.25: Configuration de mesure du coefficient de transmission - Composant parallèle
Afin d’en avoir l’impédance du composant, il suffira d’utiliser la relation suivante :
(1.34)
Pour les grandes valeurs de Z, le coefficient de transmission S21 converge vers 1 et pour cette raison,
cette mesure n’est précise que pour des impédances inférieures à Z0.
I.3.2.2 Détermination des paramètres du modèle
Nous disposons à ce stade de l’impédance du composant en fonction de la fréquence. Cette
impédance est nécessaire pour déterminer le modèle du composant. Pour cela, nous utilisons un
algorithme d’optimisation afin d’identifier les paramètres du modèle donnant une impédance
fréquentielle la plus proche possible de celle mesurée. Pour des modèles simples, un calcul
analytique ou bien un algorithme dédié à l’identification peuvent être une solution. Dans nos
travaux, nous avons utilisé un algorithme d’évolution différentielle (voir l’annexe B), développé au
sein du laboratoire. Le choix d’un algorithme stochastique pourrait être remis en question au profit
d’un algorithme déterministe, dans le cas d’identification sur des modèles simples. Cependant, dès
que les modèles se compliquent, l’introduction d’une part d’aléatoire dans l’identification des
paramètres nous permet d’obtenir des résultats satisfaisants et ceci, de manière régulière.
I.3.2.2.1 Modèle Résistance
I.3.2.2.1.1 Modèle équivalent
Malgré les singularités des différentes technologies présentées dans le paragraphe I.2.1, le modèle
équivalent de résistance que nous considérons est commun aux différents types évoqués. Ce modèle
est illustré sur la Figure 1.26.

53
Figure 1.26: Modèle équivalent d'une résistance
Le modèle est construit autour d’une résistance R qui doit être proche de la résistance nominale.
L’inductance série équivalente Llead ainsi que les capacités Clead (liées aux connectiques) et Cleakage
(capacité de fuite) permettent de compléter le modèle. Vu que les deux capacités en question sont
en parallèle, on peut simplifier le modèle équivalent en les remplaçant par une capacité équivalente :
(1.35)
En calculant l’impédance équivalente de ce modèle, on obtient la relation dans (1.37) :
(1.36)
Pour certaines résistances, le comportement capacitif pourra être masqué. Cela peut être justifié en
comparant les fréquences de résonance du couplage résistif-capacitif et celui du couplage résistif-
inductif. La fréquence du premier couplage est donnée par (1.38) tandis que celle du deuxième est
présentée dans (1.39)
(1.37)
(1.38)
Si fR-C est strictement plus petit que fR-L, on aura un comportement capacitif non masqué, sinon, la
résistance se comporte comme une résistance à basse fréquence et comme une inductance après la
fréquence de résonance.
I.3.2.2.1.2 Exemple de modélisation
Nous considérons un unique modèle commun à toutes les technologies et nous détaillons dans ce
paragraphe l’exemple de l’établissement d’un modèle haute fréquence, pour une résistance
traversante TE CONNECTIVITY / CGS SBCHE1515RJ, Série SBC, 15 Ohm, 17W, 16V. Les Figure 1.27 et
Figure 1.28 montrent la comparaison entre le module de l’impédance mesurée du composant et
l’impédance du modèle identifiée avec l’algorithme d’évolution différentielle.
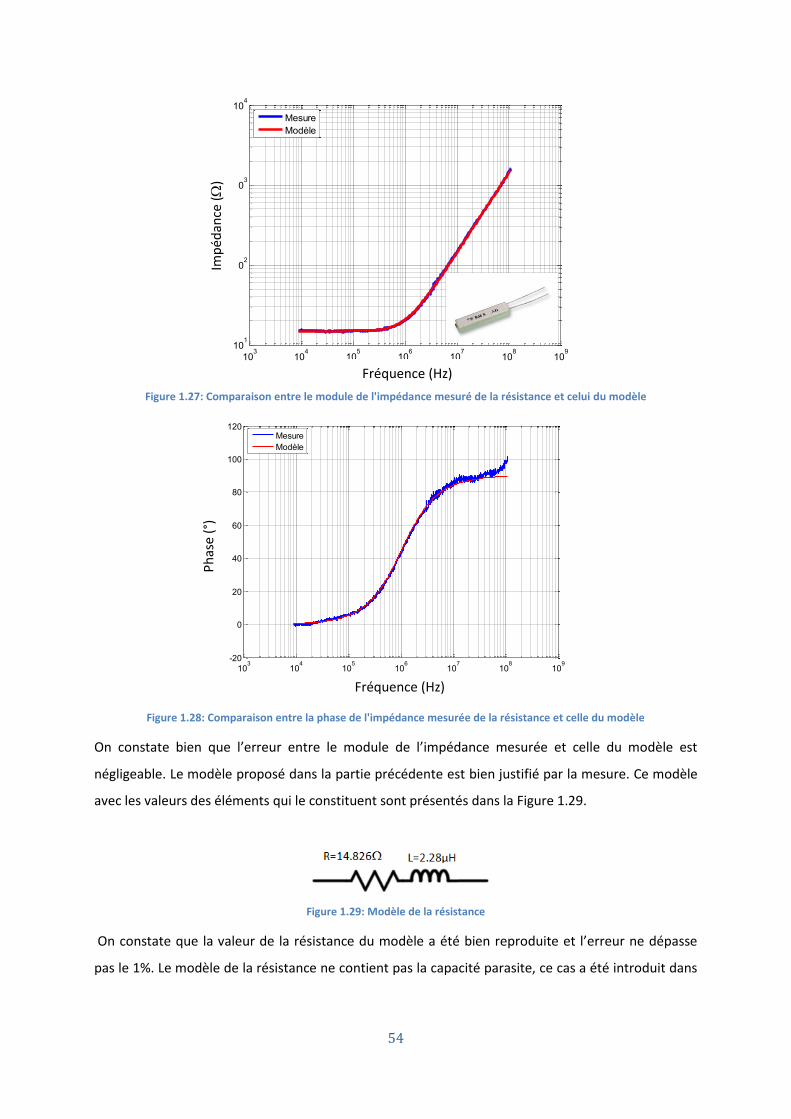
54
Figure 1.27: Comparaison entre le module de l'impédance mesuré de la résistance et celui du modèle
Figure 1.28: Comparaison entre la phase de l'impédance mesurée de la résistance et celle du modèle
On constate bien que l’erreur entre le module de l’impédance mesurée et celle du modèle est
négligeable. Le modèle proposé dans la partie précédente est bien justifié par la mesure. Ce modèle
avec les valeurs des éléments qui le constituent sont présentés dans la Figure 1.29.
Figure 1.29: Modèle de la résistance
On constate que la valeur de la résistance du modèle a été bien reproduite et l’erreur ne dépasse
pas le 1%. Le modèle de la résistance ne contient pas la capacité parasite, ce cas a été introduit dans
103
104
105
106
107
108
109
101
102
103
104
Fréquence [Hz]
Imp
éd
an
ce
[O
hm
]
Mesure
Modèle
103
104
105
106
107
108
109
-20
0
20
40
60
80
100
120
Fréquence (Hz)
Ph
ase
(°)
Mesure
Modèle
Imp
édan
ce (
)
Fréquence (Hz)
Ph
ase
(°)
Fréquence (Hz)

55
la partie précédente. En effet, fR-L est plus petit que fR-C pour cette résistance et pour cela le
comportement capacitif est masqué.
I.3.2.2.2 Modèle du condensateur
I.3.2.2.2.1 Modèle équivalent
Les technologies de condensateurs décrits dans le paragraphe I.2.2 partagent la même configuration
de base : deux terminaisons reliées à une paire de plaques parallèles, qui sont généralement
séparées par un matériau diélectrique. Un circuit équivalent généralisé pour les condensateurs
pourra être construit (Figure 1.30) mais les valeurs des éléments de ce modèle diffèrent selon les
types de condensateurs. Les parties conductrices du composant introduisent une inductance (Llead) et
une capacité (Clead). D’autre part, les plaques du condensateur introduisent elles même une
résistance Rplate. Le diélectrique entre les plaques du condensateur est modélisé par une grande
résistance (Rdielectric) placée en parallèle à la capacité nominale du composant C.
Figure 1.30: Modèle équivalent du condensateur
La capacité des parties conductrices est généralement faible devant la capacité nominale et peut être
négligée. De même, la résistance du diélectrique est très grande et pourra être considérée comme un
circuit ouvert. En éliminant ces deux paramètres, le modèle équivalent pourra être réduit à la
capacité nominale, en série avec la résistance des plaques et l’inductance des parties conductrices. Le
modèle est présenté dans la Figure 1.31.
Figure 1.31: Modèle équivalent simplifié du condensateur
La résistance des plaques Rplate est nommée souvent ESR (Equivalent Serial Resistance) et
l’inductance des parties conductrices Llead est nommée souvent ESL (Equivalent Serial Inductance).
En calculant l’impédance équivalente de ce modèle, on obtient la relation dans (1.39) :
(1.39)

56
Ce modèle du condensateur reflète un comportement variable selon la fréquence :
pour les basses fréquences, ESL se comporte comme un court-circuit et la capacité C comme
un circuit ouvert. Le modèle en totalité se comporte donc comme un circuit ouvert vu que Zeq
va tendre vers l’infini, plus exactement comme un condensateur ;
avec l’augmentation de la fréquence, l’impédance du condensateur diminue, l’impédance
totale également jusqu’à atteindre un minimum où :
(1.40)
Pour cette fréquence particulière ω, le circuit atteint sa résonance et la partie imaginaire et
la phase de l’impédance s’annule ;
au-delà de la fréquence de résonance, l’impédance de l’inductance augmente linéairement ;
l’impédance totale augmente.
La résistance ESR n’a pas une valeur constante pour tous les condensateurs. Ce facteur constitue une
différence entre les diverses technologies. Dans tous les cas, le modèle reste le même que celui de la
Figure 1.31, à l’exception de l’ESR qui est remplacée par un modèle adapté.
Deux cas peuvent se présenter : l’ESR peut augmenter ou diminuer avec la fréquence. Chacun de ces
deux cas amènera à une représentation particulière de l’ESR. La résistance du modèle équivalent
peut être remplacée par le modèle de la Figure 1.32 ou Figure 1.33 si la résistance augmente en
fonction de la fréquence ou celui de la Figure 1.33 si cette résistance diminue en fonction de la
fréquence.
Figure 1.32: Modèle 1 d'ESR dont la valeur diminue avec la fréquence
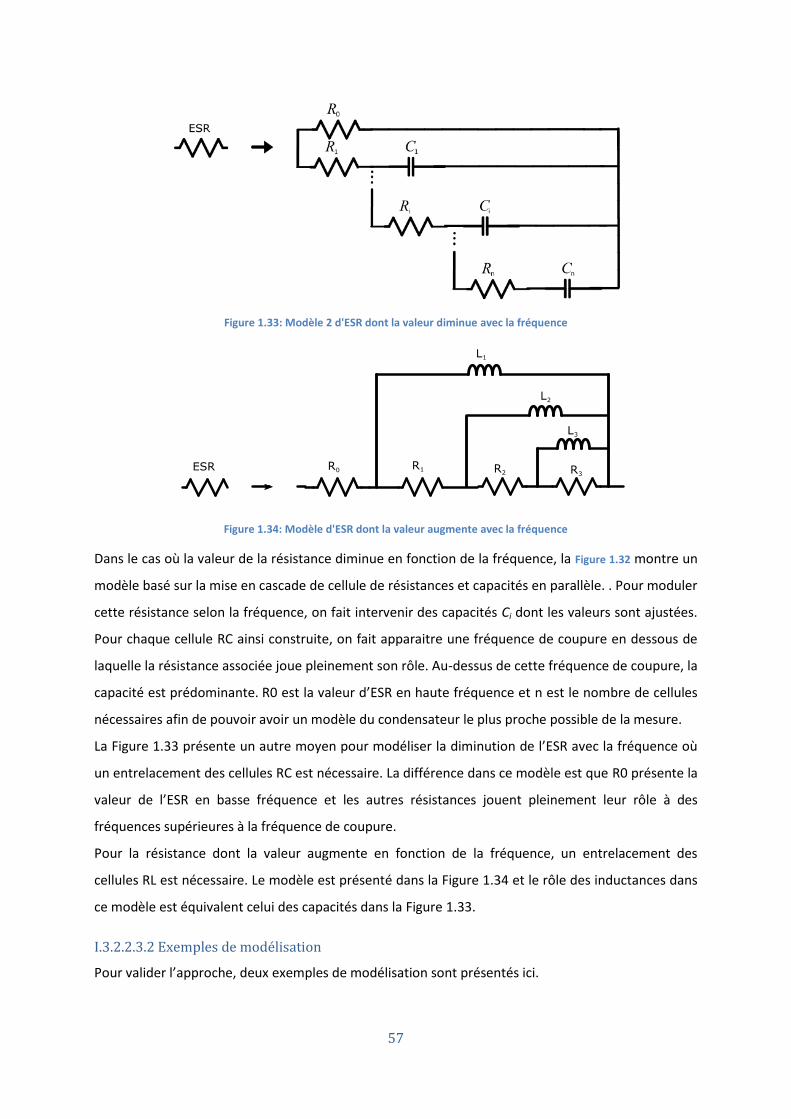
57
Figure 1.33: Modèle 2 d'ESR dont la valeur diminue avec la fréquence
Figure 1.34: Modèle d'ESR dont la valeur augmente avec la fréquence
Dans le cas où la valeur de la résistance diminue en fonction de la fréquence, la Figure 1.32 montre un
modèle basé sur la mise en cascade de cellule de résistances et capacités en parallèle. . Pour moduler
cette résistance selon la fréquence, on fait intervenir des capacités Ci dont les valeurs sont ajustées.
Pour chaque cellule RC ainsi construite, on fait apparaitre une fréquence de coupure en dessous de
laquelle la résistance associée joue pleinement son rôle. Au-dessus de cette fréquence de coupure, la
capacité est prédominante. R0 est la valeur d’ESR en haute fréquence et n est le nombre de cellules
nécessaires afin de pouvoir avoir un modèle du condensateur le plus proche possible de la mesure.
La Figure 1.33 présente un autre moyen pour modéliser la diminution de l’ESR avec la fréquence où
un entrelacement des cellules RC est nécessaire. La différence dans ce modèle est que R0 présente la
valeur de l’ESR en basse fréquence et les autres résistances jouent pleinement leur rôle à des
fréquences supérieures à la fréquence de coupure.
Pour la résistance dont la valeur augmente en fonction de la fréquence, un entrelacement des
cellules RL est nécessaire. Le modèle est présenté dans la Figure 1.34 et le rôle des inductances dans
ce modèle est équivalent celui des capacités dans la Figure 1.33.
I.3.2.2.3.2 Exemples de modélisation
Pour valider l’approche, deux exemples de modélisation sont présentés ici.
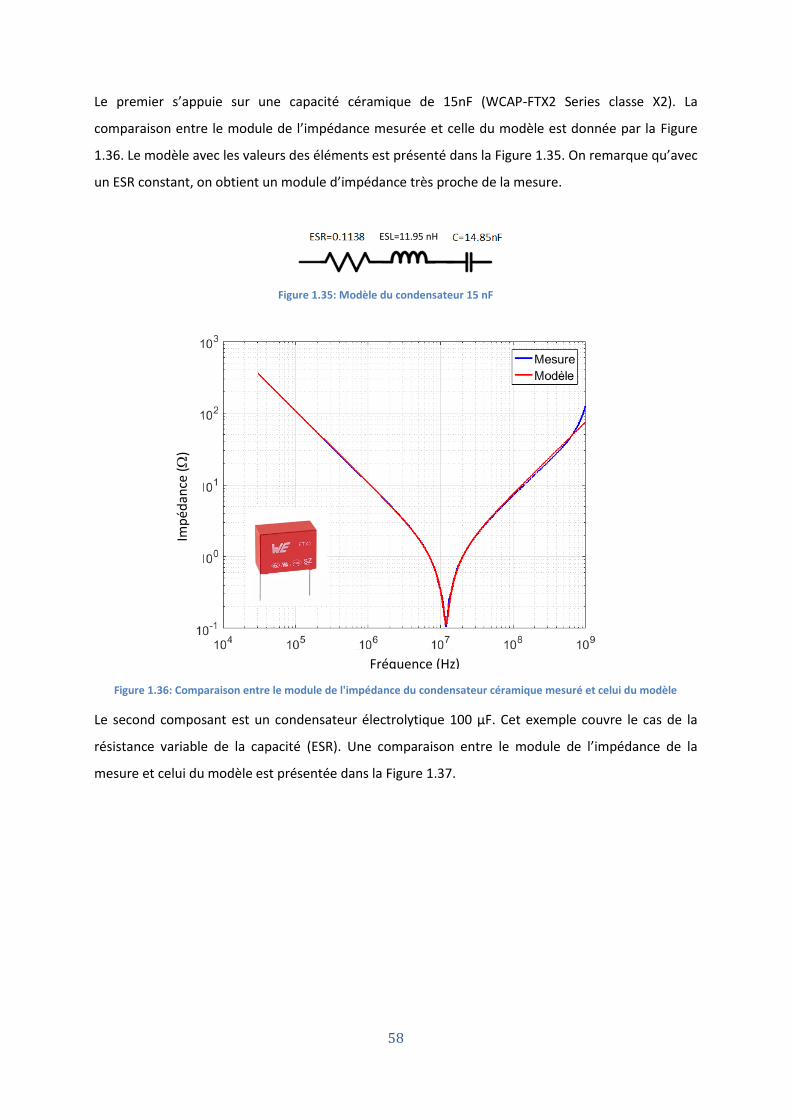
58
Le premier s’appuie sur une capacité céramique de 15nF (WCAP-FTX2 Series classe X2). La
comparaison entre le module de l’impédance mesurée et celle du modèle est donnée par la Figure
1.36. Le modèle avec les valeurs des éléments est présenté dans la Figure 1.35. On remarque qu’avec
un ESR constant, on obtient un module d’impédance très proche de la mesure.
Figure 1.35: Modèle du condensateur 15 nF
Figure 1.36: Comparaison entre le module de l'impédance du condensateur céramique mesuré et celui du modèle
Le second composant est un condensateur électrolytique 100 µF. Cet exemple couvre le cas de la
résistance variable de la capacité (ESR). Une comparaison entre le module de l’impédance de la
mesure et celui du modèle est présentée dans la Figure 1.37.
Imp
édan
ce (
)
Fréquence (Hz)
ESL=11.95 nH
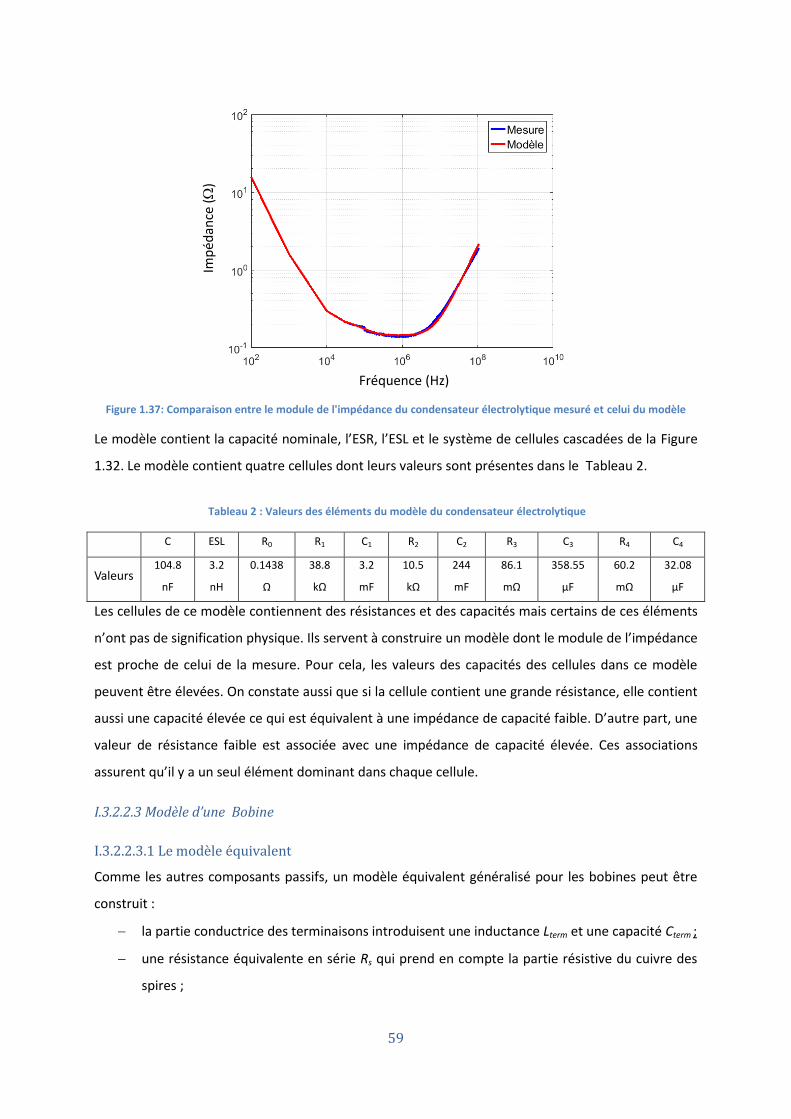
59
Figure 1.37: Comparaison entre le module de l'impédance du condensateur électrolytique mesuré et celui du modèle
Le modèle contient la capacité nominale, l’ESR, l’ESL et le système de cellules cascadées de la Figure
1.32. Le modèle contient quatre cellules dont leurs valeurs sont présentes dans le Tableau 2.
Tableau 2 : Valeurs des éléments du modèle du condensateur électrolytique
C ESL R0 R1 C1 R2 C2 R3 C3 R4 C4
Valeurs 104.8
nF
3.2
nH
0.1438
Ω
38.8
kΩ
3.2
mF
10.5
kΩ
244
mF
86.1
mΩ
358.55
µF
60.2
mΩ
32.08
µF
Les cellules de ce modèle contiennent des résistances et des capacités mais certains de ces éléments
n’ont pas de signification physique. Ils servent à construire un modèle dont le module de l’impédance
est proche de celui de la mesure. Pour cela, les valeurs des capacités des cellules dans ce modèle
peuvent être élevées. On constate aussi que si la cellule contient une grande résistance, elle contient
aussi une capacité élevée ce qui est équivalent à une impédance de capacité faible. D’autre part, une
valeur de résistance faible est associée avec une impédance de capacité élevée. Ces associations
assurent qu’il y a un seul élément dominant dans chaque cellule.
I.3.2.2.3 Modèle d’une Bobine
I.3.2.2.3.1 Le modèle équivalent
Comme les autres composants passifs, un modèle équivalent généralisé pour les bobines peut être
construit :
la partie conductrice des terminaisons introduisent une inductance Lterm et une capacité Cterm ;
une résistance équivalente en série Rs qui prend en compte la partie résistive du cuivre des
spires ;
Imp
édan
ce (
)
Fréquence (Hz)
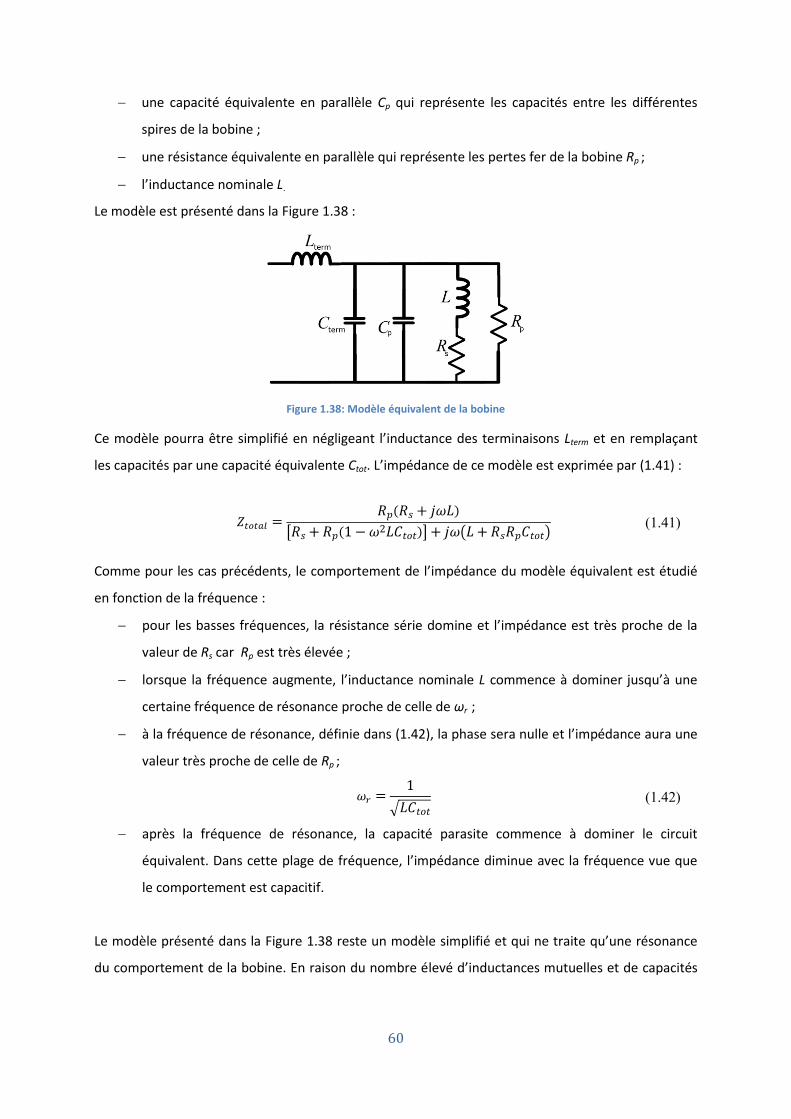
60
une capacité équivalente en parallèle Cp qui représente les capacités entre les différentes
spires de la bobine ;
une résistance équivalente en parallèle qui représente les pertes fer de la bobine Rp ;
l’inductance nominale L.
Le modèle est présenté dans la Figure 1.38 :
Figure 1.38: Modèle équivalent de la bobine
Ce modèle pourra être simplifié en négligeant l’inductance des terminaisons Lterm et en remplaçant
les capacités par une capacité équivalente Ctot. L’impédance de ce modèle est exprimée par (1.41) :
(1.41)
Comme pour les cas précédents, le comportement de l’impédance du modèle équivalent est étudié
en fonction de la fréquence :
pour les basses fréquences, la résistance série domine et l’impédance est très proche de la
valeur de Rs car Rp est très élevée ;
lorsque la fréquence augmente, l’inductance nominale L commence à dominer jusqu’à une
certaine fréquence de résonance proche de celle de ωr ;
à la fréquence de résonance, définie dans (1.42), la phase sera nulle et l’impédance aura une
valeur très proche de celle de Rp ;
(1.42)
après la fréquence de résonance, la capacité parasite commence à dominer le circuit
équivalent. Dans cette plage de fréquence, l’impédance diminue avec la fréquence vue que
le comportement est capacitif.
Le modèle présenté dans la Figure 1.38 reste un modèle simplifié et qui ne traite qu’une résonance
du comportement de la bobine. En raison du nombre élevé d’inductances mutuelles et de capacités
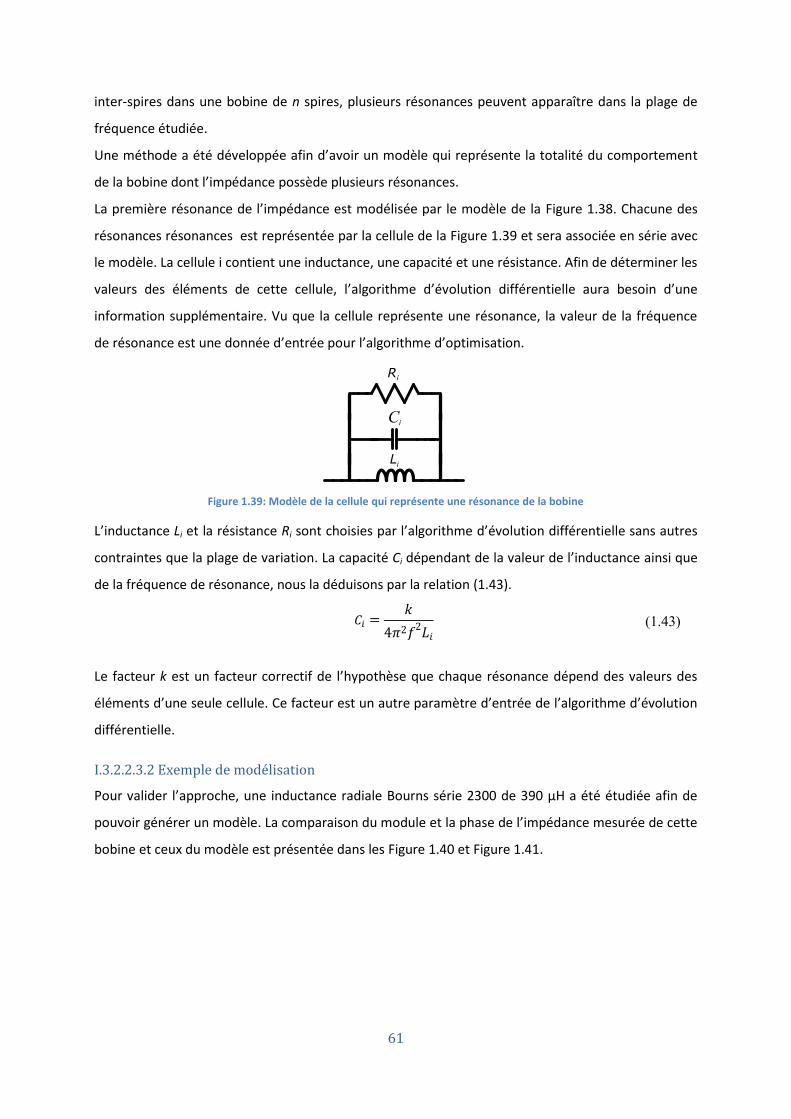
61
inter-spires dans une bobine de n spires, plusieurs résonances peuvent apparaître dans la plage de
fréquence étudiée.
Une méthode a été développée afin d’avoir un modèle qui représente la totalité du comportement
de la bobine dont l’impédance possède plusieurs résonances.
La première résonance de l’impédance est modélisée par le modèle de la Figure 1.38. Chacune des
résonances résonances est représentée par la cellule de la Figure 1.39 et sera associée en série avec
le modèle. La cellule i contient une inductance, une capacité et une résistance. Afin de déterminer les
valeurs des éléments de cette cellule, l’algorithme d’évolution différentielle aura besoin d’une
information supplémentaire. Vu que la cellule représente une résonance, la valeur de la fréquence
de résonance est une donnée d’entrée pour l’algorithme d’optimisation.
Figure 1.39: Modèle de la cellule qui représente une résonance de la bobine
L’inductance Li et la résistance Ri sont choisies par l’algorithme d’évolution différentielle sans autres
contraintes que la plage de variation. La capacité Ci dépendant de la valeur de l’inductance ainsi que
de la fréquence de résonance, nous la déduisons par la relation (1.43).
(1.43)
Le facteur k est un facteur correctif de l’hypothèse que chaque résonance dépend des valeurs des
éléments d’une seule cellule. Ce facteur est un autre paramètre d’entrée de l’algorithme d’évolution
différentielle.
I.3.2.2.3.2 Exemple de modélisation
Pour valider l’approche, une inductance radiale Bourns série 2300 de 390 µH a été étudiée afin de
pouvoir générer un modèle. La comparaison du module et la phase de l’impédance mesurée de cette
bobine et ceux du modèle est présentée dans les Figure 1.40 et Figure 1.41.
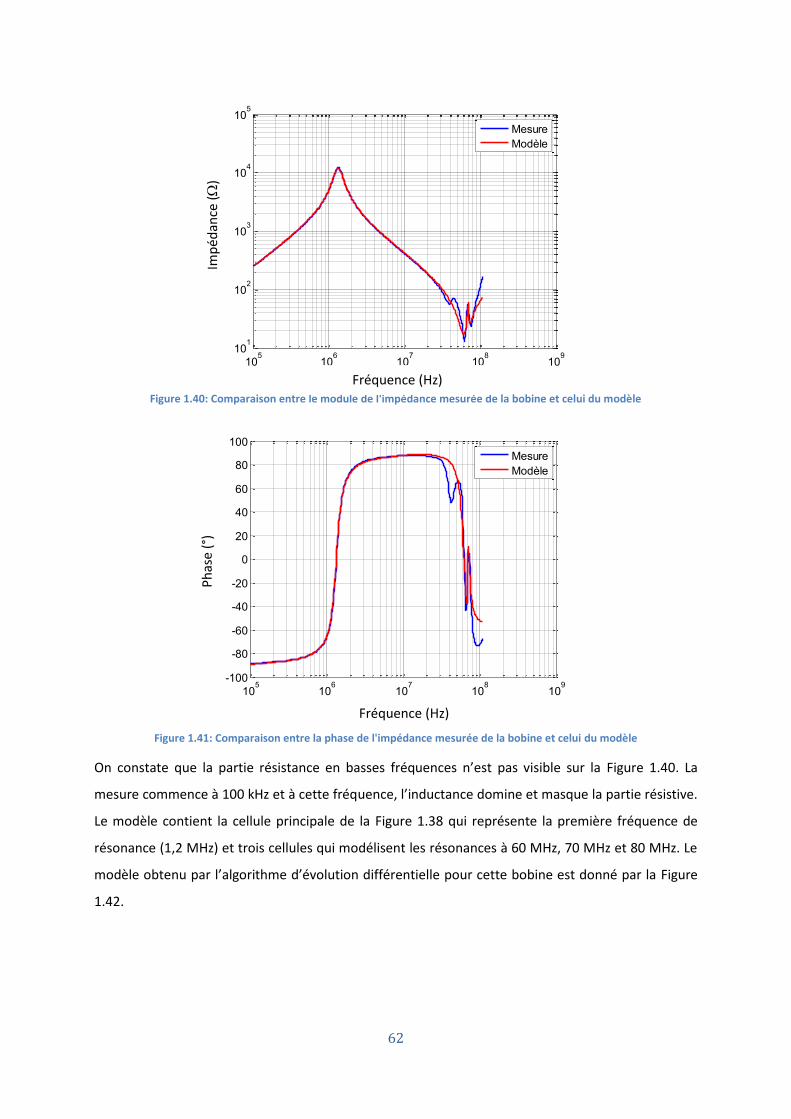
62
Figure 1.40: Comparaison entre le module de l'impédance mesurée de la bobine et celui du modèle
Figure 1.41: Comparaison entre la phase de l'impédance mesurée de la bobine et celui du modèle
On constate que la partie résistance en basses fréquences n’est pas visible sur la Figure 1.40. La
mesure commence à 100 kHz et à cette fréquence, l’inductance domine et masque la partie résistive.
Le modèle contient la cellule principale de la Figure 1.38 qui représente la première fréquence de
résonance (1,2 MHz) et trois cellules qui modélisent les résonances à 60 MHz, 70 MHz et 80 MHz. Le
modèle obtenu par l’algorithme d’évolution différentielle pour cette bobine est donné par la Figure
1.42.
105
106
107
108
109
101
102
103
104
105
Fréquence [Hz]
Imp
éd
an
ce
[O
hm
]
Mesure
Modèle
105
106
107
108
109
-100
-80
-60
-40
-20
0
20
40
60
80
100
Fréquence (Hz)
Ph
ase
(°)
Mesure
Modèle
Imp
édan
ce (
)
Fréquence (Hz)
Ph
ase
(°)
Fréquence (Hz)
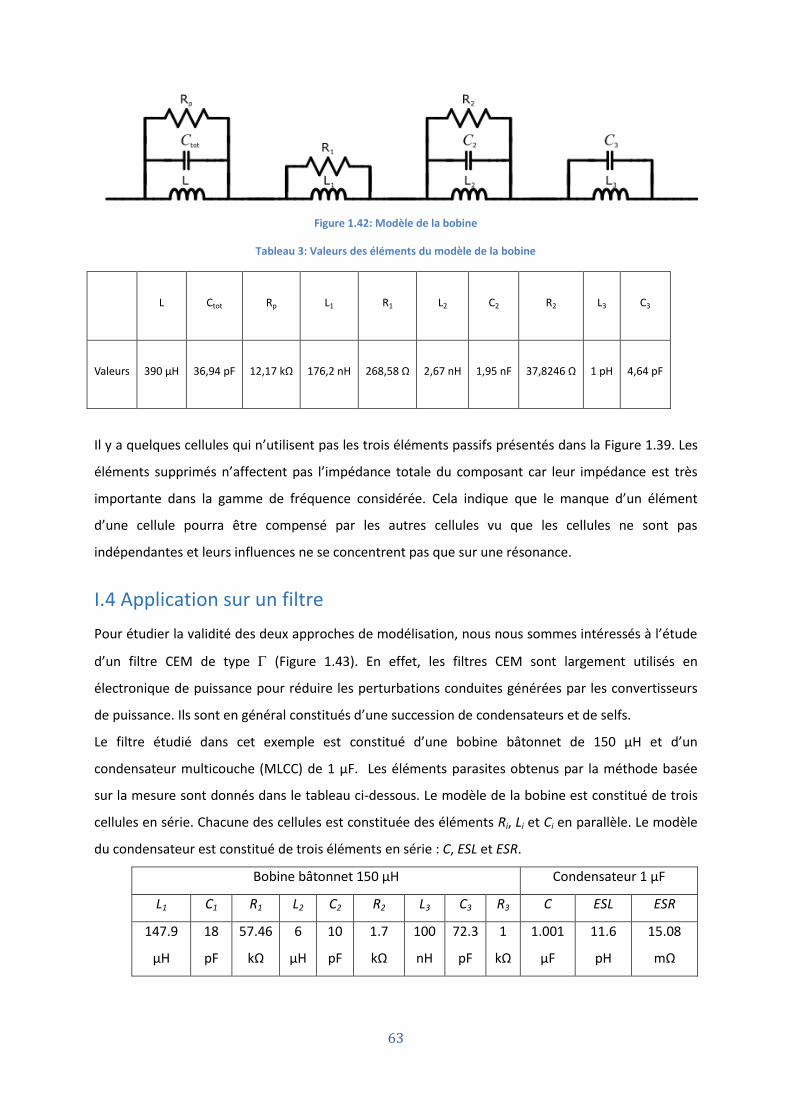
63
Figure 1.42: Modèle de la bobine
Tableau 3: Valeurs des éléments du modèle de la bobine
L Ctot Rp L1 R1 L2 C2 R2 L3 C3
Valeurs 390 µH 36,94 pF 12,17 kΩ 176,2 nH 268,58 Ω 2,67 nH 1,95 nF 37,8246 Ω 1 pH 4,64 pF
Il y a quelques cellules qui n’utilisent pas les trois éléments passifs présentés dans la Figure 1.39. Les
éléments supprimés n’affectent pas l’impédance totale du composant car leur impédance est très
importante dans la gamme de fréquence considérée. Cela indique que le manque d’un élément
d’une cellule pourra être compensé par les autres cellules vu que les cellules ne sont pas
indépendantes et leurs influences ne se concentrent pas que sur une résonance.
I.4 Application sur un filtre
Pour étudier la validité des deux approches de modélisation, nous nous sommes intéressés à l’étude
d’un filtre CEM de type (Figure 1.43). En effet, les filtres CEM sont largement utilisés en
électronique de puissance pour réduire les perturbations conduites générées par les convertisseurs
de puissance. Ils sont en général constitués d’une succession de condensateurs et de selfs.
Le filtre étudié dans cet exemple est constitué d’une bobine bâtonnet de 150 µH et d’un
condensateur multicouche (MLCC) de 1 µF. Les éléments parasites obtenus par la méthode basée
sur la mesure sont donnés dans le tableau ci-dessous. Le modèle de la bobine est constitué de trois
cellules en série. Chacune des cellules est constituée des éléments Ri, Li et Ci en parallèle. Le modèle
du condensateur est constitué de trois éléments en série : C, ESL et ESR.
Bobine bâtonnet 150 µH Condensateur 1 µF
L1 C1 R1 L2 C2 R2 L3 C3 R3 C ESL ESR
147.9
µH
18
pF
57.46
kΩ
6
µH
10
pF
1.7
kΩ
100
nH
72.3
pF
1
kΩ
1.001
µF
11.6
pH
15.08
mΩ
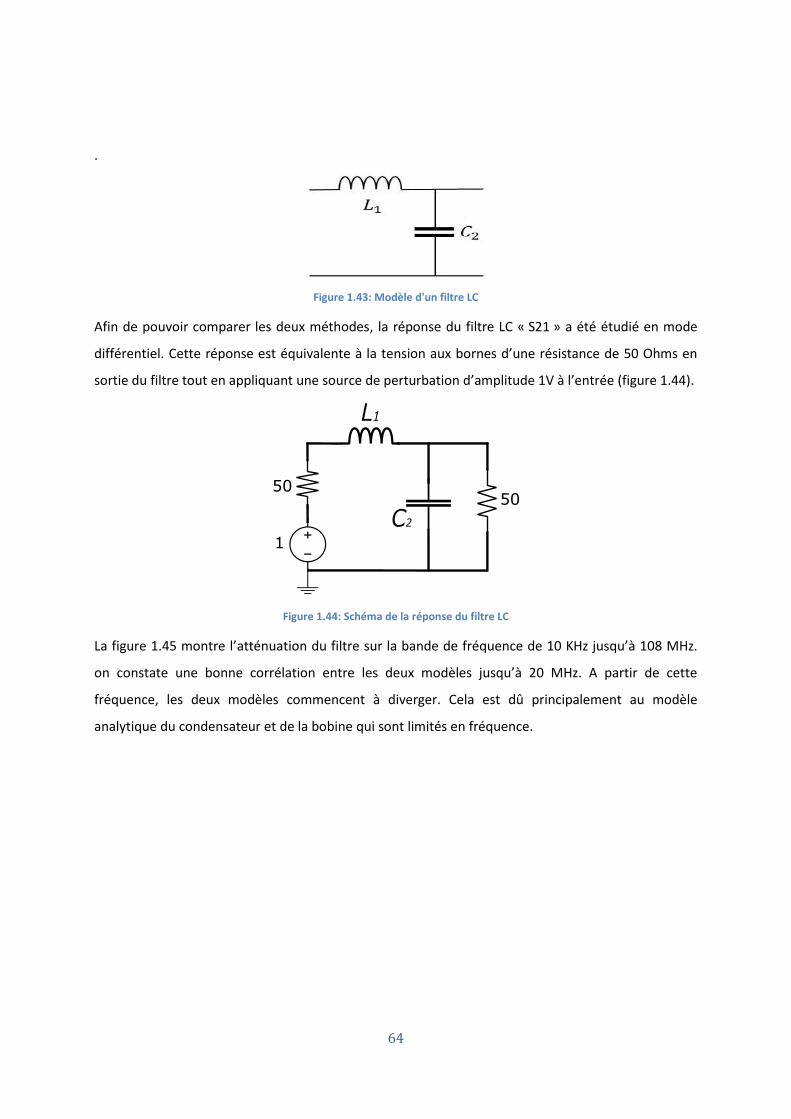
64
.
Figure 1.43: Modèle d'un filtre LC
Afin de pouvoir comparer les deux méthodes, la réponse du filtre LC « S21 » a été étudié en mode
différentiel. Cette réponse est équivalente à la tension aux bornes d’une résistance de 50 Ohms en
sortie du filtre tout en appliquant une source de perturbation d’amplitude 1V à l’entrée (figure 1.44).
Figure 1.44: Schéma de la réponse du filtre LC
La figure 1.45 montre l’atténuation du filtre sur la bande de fréquence de 10 KHz jusqu’à 108 MHz.
on constate une bonne corrélation entre les deux modèles jusqu’à 20 MHz. A partir de cette
fréquence, les deux modèles commencent à diverger. Cela est dû principalement au modèle
analytique du condensateur et de la bobine qui sont limités en fréquence.
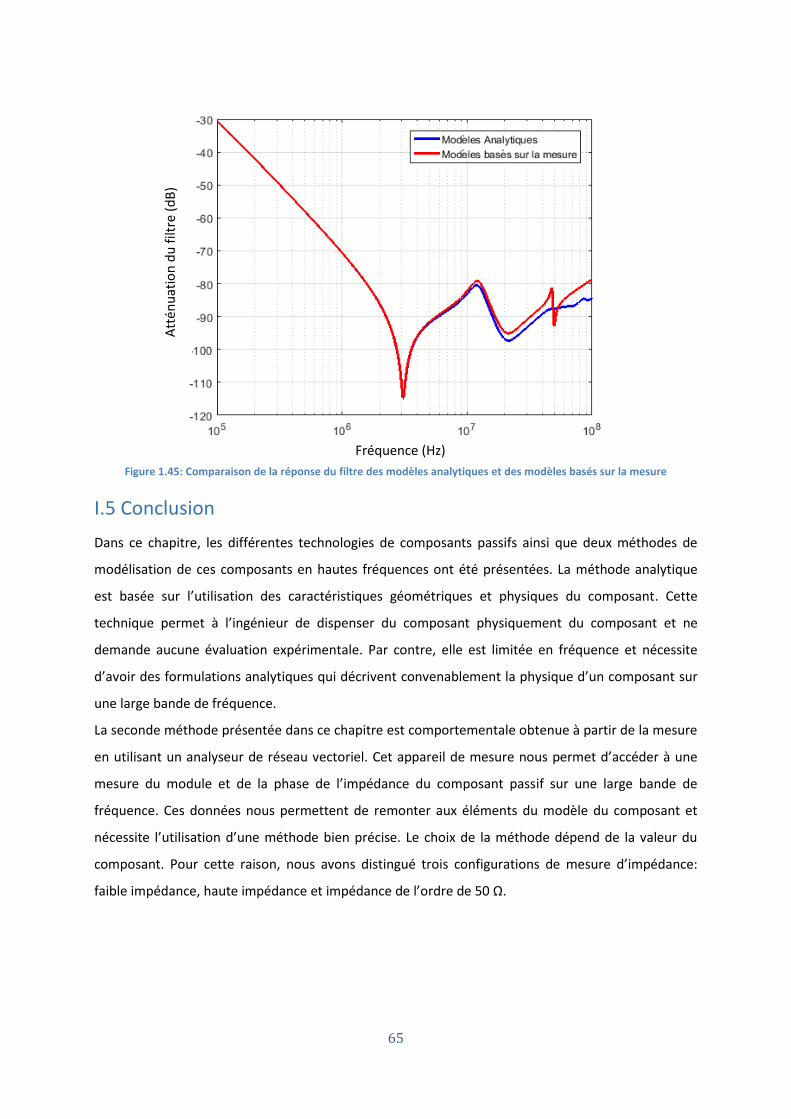
65
Figure 1.45: Comparaison de la réponse du filtre des modèles analytiques et des modèles basés sur la mesure
I.5 Conclusion
Dans ce chapitre, les différentes technologies de composants passifs ainsi que deux méthodes de
modélisation de ces composants en hautes fréquences ont été présentées. La méthode analytique
est basée sur l’utilisation des caractéristiques géométriques et physiques du composant. Cette
technique permet à l’ingénieur de dispenser du composant physiquement du composant et ne
demande aucune évaluation expérimentale. Par contre, elle est limitée en fréquence et nécessite
d’avoir des formulations analytiques qui décrivent convenablement la physique d’un composant sur
une large bande de fréquence.
La seconde méthode présentée dans ce chapitre est comportementale obtenue à partir de la mesure
en utilisant un analyseur de réseau vectoriel. Cet appareil de mesure nous permet d’accéder à une
mesure du module et de la phase de l’impédance du composant passif sur une large bande de
fréquence. Ces données nous permettent de remonter aux éléments du modèle du composant et
nécessite l’utilisation d’une méthode bien précise. Le choix de la méthode dépend de la valeur du
composant. Pour cette raison, nous avons distingué trois configurations de mesure d’impédance:
faible impédance, haute impédance et impédance de l’ordre de 50 Ω.
Att
énu
atio
n d
u f
iltre
(d
B)
Fréquence (Hz)

66

67
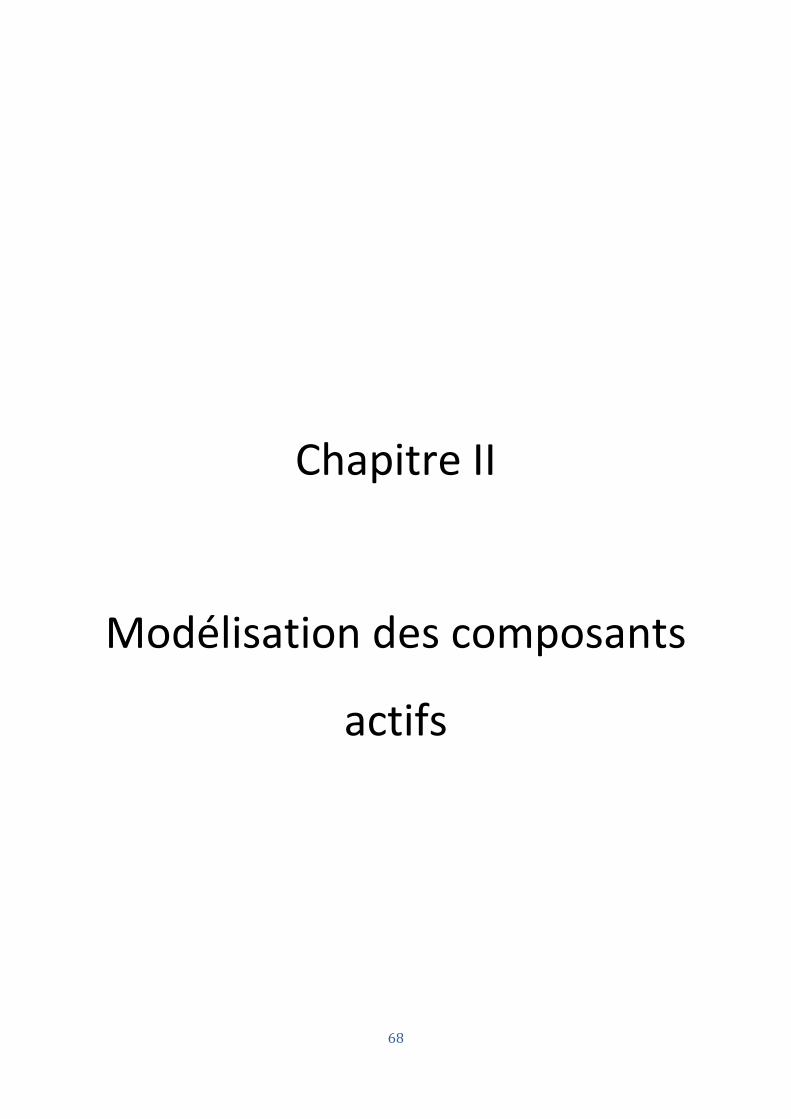
68
Chapitre II
Modélisation des composants
actifs

69

70
II.1 Composants actifs
Les transistors et les diodes sont évidemment indispensables à l’électronique de puissance : les
transistors sont notamment utilisés comme interrupteurs pour assurer le découpage qui est à la base
de tout convertisseur. Les semi-conducteurs sont regroupés sous l’appellation « composants actifs »,
même les diodes qui n’ont pourtant rien d’actif (!), par opposition aux composants passifs que sont
les condensateurs, inductances, transformateurs et résistances. Les semi-conducteurs
commercialisés permettent de construire des convertisseurs allant de la fraction de watt à des
dizaines de mégawatts.
L’invention du transistor à jonction bipolaire en 1947 par Schockley, Bardeen et Brattain [52] a
marqué le point de départ de l’électronique à semi-conducteurs qui a relayé l’utilisation des tubes à
vide. Il a toutefois fallu attendre l’invention du thyristor en 1957 [53] pour que des semi-conducteurs
entrent dans la réalisation de convertisseurs au sens où on l’entend actuellement dans le cadre de
« l’électronique de puissance » (des alimentations continues et autres convertisseurs conçus autour
de tubes n’utilisant pas le découpage existaient antérieurement). L’électronique de puissance était
née.
Les applications du thyristor se sont multipliées rapidement, pour toutes puissances. Cependant, le
thyristor présente au moins un grave inconvénient : il ne peut pas être bloqué par une action simple,
par la gâchette par exemple ; seul, un lourd « circuit d’extinction » ramenant périodiquement le
courant à zéro permet de bloquer le thyristor (comme une diode). De longues recherches visant à
simplifier la commande du thyristor n’ont abouti que dans les années 80 par la commercialisation
des GTO (Gate Turn-off Thyristors), lesquels ont rapidement été abandonnés car l’impulsion de
courant dans la gâchette nécessaire au blocage était du même ordre de grandeur que le courant à
bloquer !
Les premiers transistors bipolaires « de puissance », c’est-à-dire capables de commuter au moins des
centaines d’ampères sous des centaines de volts, ont été commercialisés dans les années 70.
D’emblée, ils se sont avérés beaucoup plus pratiques d’emploi : ils peuvent être commandés par
l’application d’un courant adéquat dans la base, tant pour la mise en conduction que pour le blocage.
En outre, ils sont capables de découper à plusieurs dizaines de kHz, c’est-à-dire à une fréquence
largement supérieure à celle des convertisseurs à thyristors (50 à 500 Hz environ, notamment pour
une contrainte de « temps de repos » et de « recouvrement inverse » des thyristors). Il est alors
devenu évident que le choix d’une fréquence de découpage élevée pouvait se traduire par des
convertisseurs beaucoup plus petits, moins lourds, moins coûteux et plus performants (rapidité de
réponse, rendement…).

71
Cependant, les transistors bipolaires souffrent également d’un inconvénient inhérent à leur principe :
ils se commandent par un courant à injecter dans la base, et ce courant doit atteindre environ le
dixième, voire le cinquième, du courant commuté ; c’est beaucoup pour des convertisseurs de
puissance élevée et cela nécessite pratiquement une véritable électronique de puissance pour
commander le transistor. C’est pourquoi, la commercialisation des premiers MOSFET [54] dans les
années 80 et celle des premiers IGBT [55] dans les années 90 ont marqué l’arrêt de mort du
transistor bipolaire. Il n’a pas totalement disparu mais les gammes disponibles de courant et de
tension se sont beaucoup réduites pour ne couvrir que des applications spécifiques.
Le MOSFET (Metal Oxyde Silicium Field Effect Transistor) se commande par une tension sans que, en
théorie, il soit nécessaire d’appliquer un courant à la grille (Oxyde = isolant entre Metal de la grille et
Silicium du corps du transistor). D’emblée, le MOSFET s’est avéré capable de commuter à 100 kHz ;
actuellement, il est possible d’atteindre 500 à 700 kHz sans prendre trop de précaution dans des
convertisseurs de quelques centaines de watts. Dés les années 85-90, des techniques de
« commutation douce » ont permis de pousser la fréquence jusqu’à 2 MHz pour 2 kW environ. Les
convertisseurs ont alors littéralement « fondu ». Le MOSFET, par contre, ne permet pas la réalisation
de convertisseurs dépassant la dizaine de kW environ.
L’IGBT (Insulated Gate Bipolar Transistor) associe les deux technologies (grille isolée pour une
commande en tension et transistor bipolaire pour l’aspect « forte puissance »). Très pratique
d’emploi par sa commande en tension et continuant à évoluer depuis sa création vers des puissances
de plus en plus fortes, après avoir complètement supplanté le transistor bipolaire, il remplace de plus
en plus le thyristor qui se limite dans ses derniers retranchements, à savoir le domaine de la très
forte puissance (des dizaines de MW) ; et pourtant l’IGBT est bien moins rapide que le transistor
bipolaire (5 à 20 kHz contre 20 à 50 kHz, selon la puissance).
Actuellement, le MOSFET est utilisé autant que possible, donc en dessous de la vingtaine de kW ; à
puissance plus forte, de 10 kW à quelques MW environ, c’est l’IGBT qui s’impose ; au-delà, il reste
« encore » le thyristor. Récemment, est apparu le transistor GaN (basé sur du Nitrure de Gallium).
Son potentiel semble énorme, notamment en terme de fréquence : 10 MHz. Certains composants
passifs pourraient alors se révéler inadaptés ; c’est notamment le cas de la plupart des matériaux
magnétiques. Le GaN peut en particulier mener aux inductances et transformateurs « à air » ; avec
de nouvelles contraintes pour la CEM.
Les concepteurs ont recours de plus en plus à la simulation pour prédire les perturbations CEM dès la
phase de conception afin de réduire ces délais ainsi que les coûts. Pour cette raison, il est important
d’avoir un modèle du composant actif qui sera valable dans la plage de fréquence étudiée vu que ce
composant est la source principale des perturbations électromagnétiques. Dans ce chapitre, nous
présenterons différents types de modèles d’un composant actif – le MOSFET - qui varient en degré
72
de liberté et donc en précision. Ces modèles peuvent représenter simplement le composant par une
résistance variable mais peuvent aussi intégrer toutes les variations des éléments du modèle en
fonction de la tension et de la fréquence. Certains de ces modèles (comme celui de la librairie LTspice
IV et celui du constructeur) peuvent être suffisants pour nos applications dans le cas où les
constructeurs mettent à disposition ces modèles ce qui n’est pas toujours le cas. Pour cette raison,
nous avons développé un modèle qui se base sur la mesure. Il est suffisamment précis pour prendre
en considération beaucoup de phénomènes physiques et peut être réalisé sans être dépendant de
nature confidentielle des données constructeur.
II.2 Modélisation
Les évolutions successives des technologies ont amené les composants semi-conducteurs à des
performances toujours plus élevées, visant en premier lieu à améliorer les caractéristiques
électriques nominales des composants (courant, tension, fréquences de commutation). Par ailleurs,
de nouvelles applications incitent à la réduction des volumes et des masses des systèmes,
notamment dans le domaine des transports où ces critères sont cruciaux (aéronautique, automobile,
etc.)
La compacité visée implique naturellement une gestion plus fine des contraintes thermiques et
électromagnétiques.
Cette tendance (le downsizing) incite donc les concepteurs à faire des efforts toujours plus
importants pour prévoir le comportement des composants dans leur environnement. Ainsi, la
modélisation est une étape inévitable du dimensionnement d’un convertisseur pour une application
donnée. Nous nous sommes concentrés dans nos études sur le MOSFET, un composant
fréquemment utilisé dans les applications embarquées car il est le seul à autoriser des fréquences de
découpage élevées.
Commençons par une petite description du MOSFET. Ce transistor est un interrupteur commandé en
tension. Il est composé de trois bornes comme montre la Figure 2.1 : la grille, le drain et la source.
Figure 2.1: Symbole du MOSFET
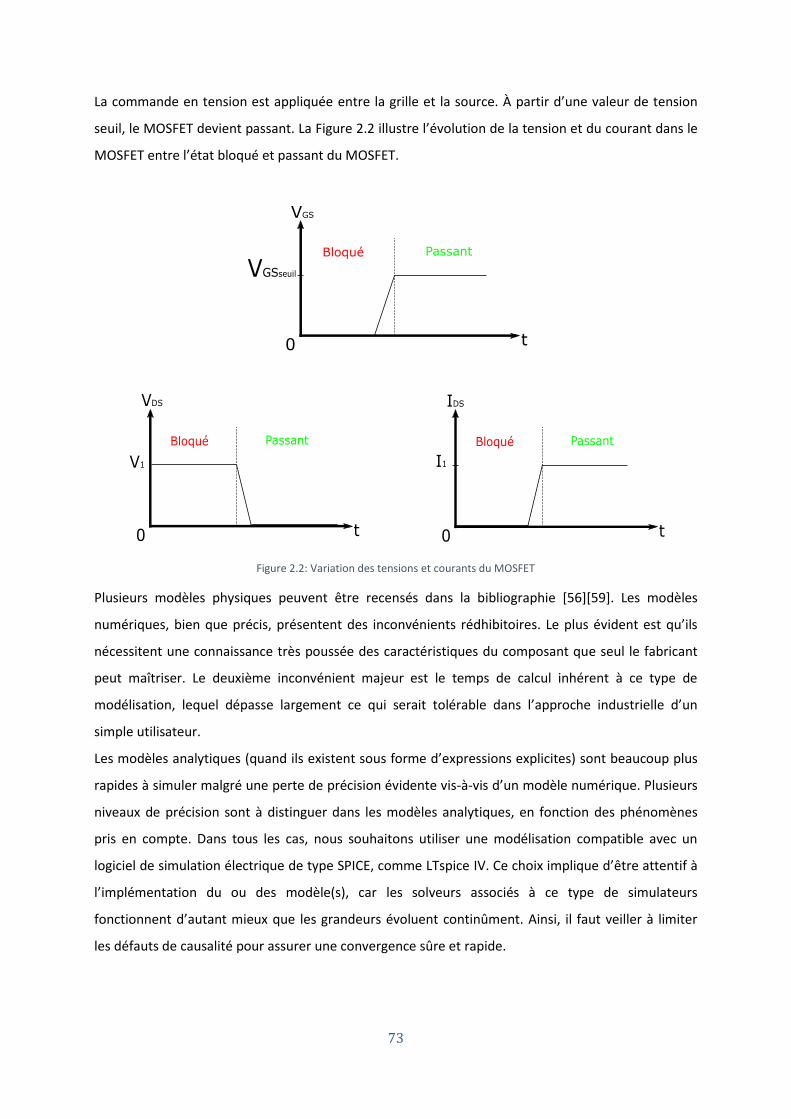
73
La commande en tension est appliquée entre la grille et la source. À partir d’une valeur de tension
seuil, le MOSFET devient passant. La Figure 2.2 illustre l’évolution de la tension et du courant dans le
MOSFET entre l’état bloqué et passant du MOSFET.
Figure 2.2: Variation des tensions et courants du MOSFET
Plusieurs modèles physiques peuvent être recensés dans la bibliographie [56][59]. Les modèles
numériques, bien que précis, présentent des inconvénients rédhibitoires. Le plus évident est qu’ils
nécessitent une connaissance très poussée des caractéristiques du composant que seul le fabricant
peut maîtriser. Le deuxième inconvénient majeur est le temps de calcul inhérent à ce type de
modélisation, lequel dépasse largement ce qui serait tolérable dans l’approche industrielle d’un
simple utilisateur.
Les modèles analytiques (quand ils existent sous forme d’expressions explicites) sont beaucoup plus
rapides à simuler malgré une perte de précision évidente vis-à-vis d’un modèle numérique. Plusieurs
niveaux de précision sont à distinguer dans les modèles analytiques, en fonction des phénomènes
pris en compte. Dans tous les cas, nous souhaitons utiliser une modélisation compatible avec un
logiciel de simulation électrique de type SPICE, comme LTspice IV. Ce choix implique d’être attentif à
l’implémentation du ou des modèle(s), car les solveurs associés à ce type de simulateurs
fonctionnent d’autant mieux que les grandeurs évoluent continûment. Ainsi, il faut veiller à limiter
les défauts de causalité pour assurer une convergence sûre et rapide.
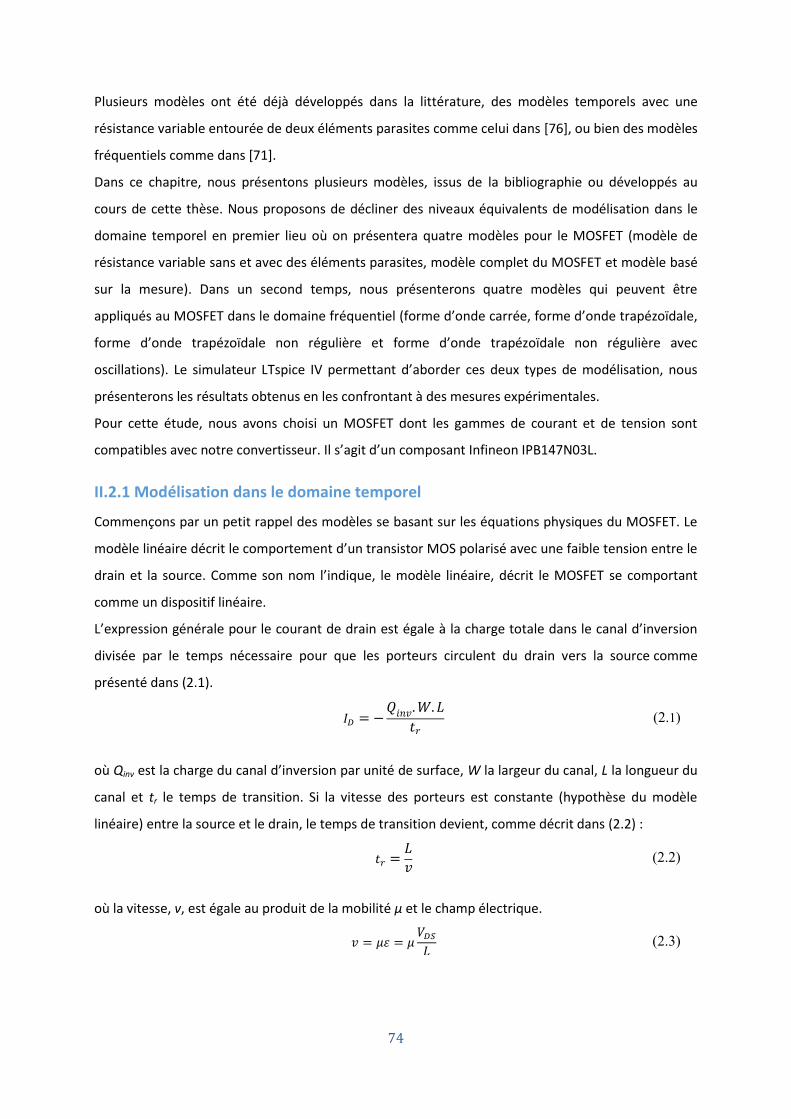
74
Plusieurs modèles ont été déjà développés dans la littérature, des modèles temporels avec une
résistance variable entourée de deux éléments parasites comme celui dans [76], ou bien des modèles
fréquentiels comme dans [71].
Dans ce chapitre, nous présentons plusieurs modèles, issus de la bibliographie ou développés au
cours de cette thèse. Nous proposons de décliner des niveaux équivalents de modélisation dans le
domaine temporel en premier lieu où on présentera quatre modèles pour le MOSFET (modèle de
résistance variable sans et avec des éléments parasites, modèle complet du MOSFET et modèle basé
sur la mesure). Dans un second temps, nous présenterons quatre modèles qui peuvent être
appliqués au MOSFET dans le domaine fréquentiel (forme d’onde carrée, forme d’onde trapézoïdale,
forme d’onde trapézoïdale non régulière et forme d’onde trapézoïdale non régulière avec
oscillations). Le simulateur LTspice IV permettant d’aborder ces deux types de modélisation, nous
présenterons les résultats obtenus en les confrontant à des mesures expérimentales.
Pour cette étude, nous avons choisi un MOSFET dont les gammes de courant et de tension sont
compatibles avec notre convertisseur. Il s’agit d’un composant Infineon IPB147N03L.
II.2.1 Modélisation dans le domaine temporel
Commençons par un petit rappel des modèles se basant sur les équations physiques du MOSFET. Le
modèle linéaire décrit le comportement d’un transistor MOS polarisé avec une faible tension entre le
drain et la source. Comme son nom l’indique, le modèle linéaire, décrit le MOSFET se comportant
comme un dispositif linéaire.
L’expression générale pour le courant de drain est égale à la charge totale dans le canal d’inversion
divisée par le temps nécessaire pour que les porteurs circulent du drain vers la source comme
présenté dans (2.1).
(2.1)
où Qinv est la charge du canal d’inversion par unité de surface, W la largeur du canal, L la longueur du
canal et tr le temps de transition. Si la vitesse des porteurs est constante (hypothèse du modèle
linéaire) entre la source et le drain, le temps de transition devient, comme décrit dans (2.2) :
(2.2)
où la vitesse, v, est égale au produit de la mobilité µ et le champ électrique.
(2.3)

75
La vitesse constante implique également un champ électrique constant de sorte que le champ soit
égal à la tension entre le drain et la source divisée par la longueur du canal. (2.4) présente donc la
nouvelle expression pour le courant de drain :
(2.4)
On pourra assumer maintenant que la densité de charge dans le canal d’inversion est aussi
constante. En fait, elle dépend de la capacité d’oxyde de grille Cox, la tension entre la grille et la
source VGS et la tension seuil de polarisation Vth :
(2.5)
Cette charge d’inversion est nulle si la tension entre la grille et la source est inférieure à la tension de
seuil. En replaçant l’expression de (2.5) dans (2.4), le courant de drain devient :
(2.6)
D’autre part, le modèle quadratique utilise les mêmes hypothèses que le modèle linéaire tout en
permettant à la charge du canal d’inversion de varier entre la source et le drain. Le courant est relié
aussi à la tension locale du canal VC. Considérons une petite section dans le composant de largeur dy
et de tension VC+VS, (2.6) devient en remplaçant la tension VDS par la tension du canal :
(2.7)
En intégrant les deux côtés de l’équation et en faisant varier y entre 0 et L et VC entre 0 et VDS, (2.7)
devient :
(2.8)
Vu que le courant ID est constant dans la section choisie, le courant de drain devient dans la zone
linéaire :
(2.9)
Le courant de drain commence par augmenter linéairement avec la tension VDS pour arriver à un
courant maximal. Selon (2.9), le courant pourrait même diminuer après et finit par devenir négatif.
Cependant, une diode PN entre le drain et le substrat du MOSFET bloque ce phénomène et le
courant atteint sa valeur maximale et la maintient pour des valeurs de tensions VDS plus élevées. Ce
courant maximal est le courant de saturation et qui est équivalent à la tension VDS supérieure à VGS -
Vth.

76
(2.10)
Le modèle quadratique explique la caractéristique statique courant-tension du MOSFET. Le courant
de drain varie en fonction de la tension VGS et de la tension VDS mais les mesures montrent qu’il y a
une différence entre ces équations et la réalité. Afin de corriger cette différence, un modèle
empirique est réalisable en multipliant le courant de drain de (2.9) et (2.10) par (1+λVDS) où λ est un
paramètre d’identification qui varie entre 0 et 1. Ce modèle dépend des propriétés physiques et
géométriques qui ne sont pas facilement accessibles. Dans la suite de cette partie, plusieurs modèles
de simulation compatibles avec LTspice IV du MOSFET vont être présentés.
II.2.1.1 Modèle de résistance variable
Le premier modèle évalué s’appuie sur une résistance variable, RDSon/off, définie entre une valeur
élevée pour l’état bloqué du MOSFET et une faible valeur pour l’état passant. Le modèle sera
équivalent à une source discontinue ON/OFF. Etant donné que SPICE ne tolère pas les discontinuités
qui, par ailleurs, ne seraient pas physiques, on doit assurer une évolution de la résistance entre l’état
ON et l’état OFF. Pour cela nous proposons une simple évolution linéaire de la résistance en fonction
de la tension grille-source. Ce modèle est présenté dans la Figure 2.3.
Figure 2.3: Modèle MOSFET RDSon/off
Le MOSFET est un composant actif commandé en tension. Pour cela, la résistance variable dépend de
la tension de commande. La relation entre la valeur de la résistance variable et la tension de
commande est donnée par (2.11) :
(2.11)
où VGS(t) est la tension de commande entre la grille et la source et VGSon est la tension de la
commande qui rend le MOSFET passant.
En se basant sur la datasheet du MOSFET Infineon IPB147N03L, la valeur de RDSoff est de 30 MΩ, une
valeur élevée qui assure que le MOSFET est pratiquement équivalent à un circuit ouvert. Pour la
valeur RDSon, elle modélise la résistance de l’état passant du MOSFET. La valeur de cette résistance
était de 17,4 mΩ pour le MOSFET choisi.
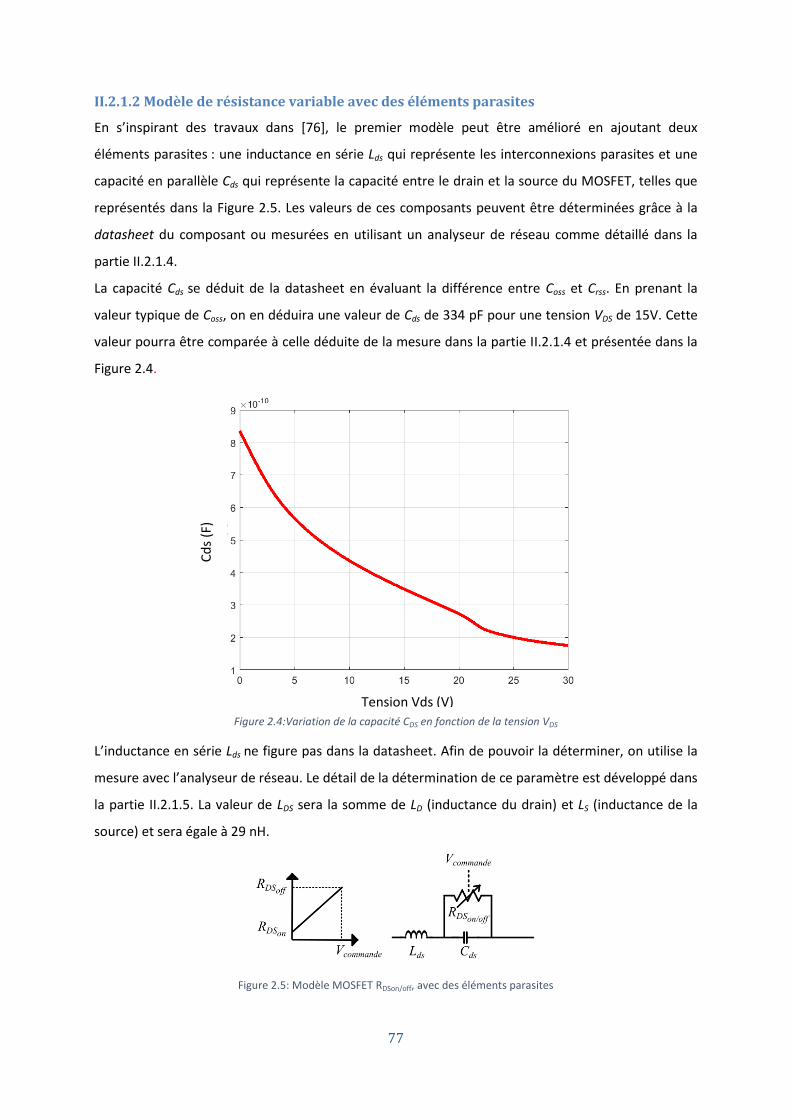
77
II.2.1.2 Modèle de résistance variable avec des éléments parasites
En s’inspirant des travaux dans [76], le premier modèle peut être amélioré en ajoutant deux
éléments parasites : une inductance en série Lds qui représente les interconnexions parasites et une
capacité en parallèle Cds qui représente la capacité entre le drain et la source du MOSFET, telles que
représentés dans la Figure 2.5. Les valeurs de ces composants peuvent être déterminées grâce à la
datasheet du composant ou mesurées en utilisant un analyseur de réseau comme détaillé dans la
partie II.2.1.4.
La capacité Cds se déduit de la datasheet en évaluant la différence entre Coss et Crss. En prenant la
valeur typique de Coss, on en déduira une valeur de Cds de 334 pF pour une tension VDS de 15V. Cette
valeur pourra être comparée à celle déduite de la mesure dans la partie II.2.1.4 et présentée dans la
Figure 2.4.
Figure 2.4:Variation de la capacité CDS en fonction de la tension VDS
L’inductance en série Lds ne figure pas dans la datasheet. Afin de pouvoir la déterminer, on utilise la
mesure avec l’analyseur de réseau. Le détail de la détermination de ce paramètre est développé dans
la partie II.2.1.5. La valeur de LDS sera la somme de LD (inductance du drain) et LS (inductance de la
source) et sera égale à 29 nH.
Figure 2.5: Modèle MOSFET RDSon/off, avec des éléments parasites
Cd
s (F
)
Tension Vds (V)
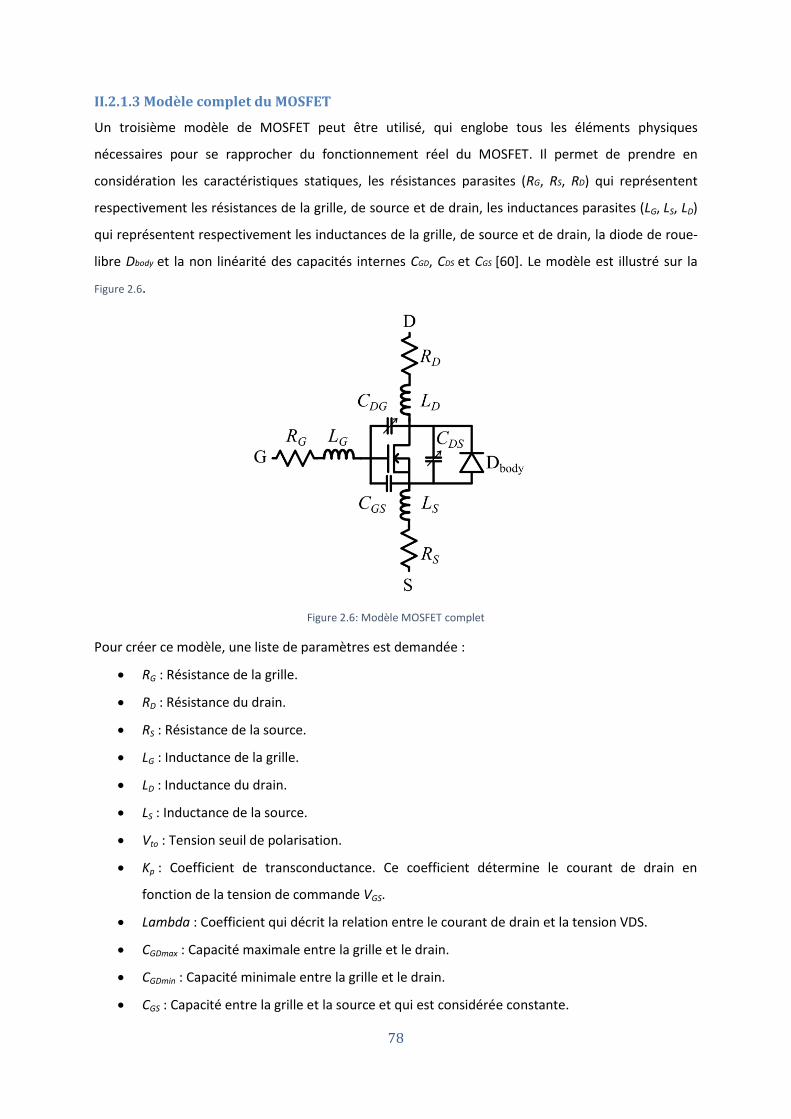
78
II.2.1.3 Modèle complet du MOSFET
Un troisième modèle de MOSFET peut être utilisé, qui englobe tous les éléments physiques
nécessaires pour se rapprocher du fonctionnement réel du MOSFET. Il permet de prendre en
considération les caractéristiques statiques, les résistances parasites (RG, RS, RD) qui représentent
respectivement les résistances de la grille, de source et de drain, les inductances parasites (LG, LS, LD)
qui représentent respectivement les inductances de la grille, de source et de drain, la diode de roue-
libre Dbody et la non linéarité des capacités internes CGD, CDS et CGS [60]. Le modèle est illustré sur la
Figure 2.6.
Figure 2.6: Modèle MOSFET complet
Pour créer ce modèle, une liste de paramètres est demandée :
RG : Résistance de la grille.
RD : Résistance du drain.
RS : Résistance de la source.
LG : Inductance de la grille.
LD : Inductance du drain.
LS : Inductance de la source.
Vto : Tension seuil de polarisation.
Kp : Coefficient de transconductance. Ce coefficient détermine le courant de drain en
fonction de la tension de commande VGS.
Lambda : Coefficient qui décrit la relation entre le courant de drain et la tension VDS.
CGDmax : Capacité maximale entre la grille et le drain.
CGDmin : Capacité minimale entre la grille et le drain.
CGS : Capacité entre la grille et la source et qui est considérée constante.
79
Cjo : Capacité de la diode de roue libre qui représente aussi la capacité entre le drain et la
source.
Is : Courant de saturation de la diode de roue libre.
RB : Résistance de la diode de roue libre.
La datasheet du composant pourra aider à déterminer quelques paramètres du modèle mais afin
d’avoir la totalité du modèle, nous serons parfois amenés à demander quelques paramètres au
constructeur (ce qui pourrait être parfois impossible selon le constructeur).
La capacité entre la grille et le drain dans ce modèle est variable et cette variation dépend aussi du
signe de la tension entre la grille et le drain. Pour des valeurs VGD positives, le modèle présente une
variation de CGD selon la tangente hyperbolique de VGD tandis que pour des valeurs VGD négatives, la
capacité CGD varie selon l’arc tangent de VGD.
Ce modèle est fourni dans certains cas dans des librairies comme celles de LTspice IV ou bien donné
directement par le constructeur sous différents niveaux qui peuvent parfois prendre la température
comme paramètre aussi. Dans ce dernier cas, le modèle peut faire appel à des formulations
analytiques qui s’éloignent de la physique et qui sont implémentées au moyen de sources
comportementales. Dans les deux cas, le manque d’information rend difficile, pour l’utilisateur du
composant discret, de remonter à un niveau de connaissance et de précision suffisant.
II.2.1.4 Modèle basé sur la mesure
Les modèles de la librairie LTspice IV et du fournisseur sont des modèles prédéfinis basés, ou bien sur
des propriétés physiques et géométriques, ou bien sur des données de la datasheet du composant.
Un autre modèle qui se base sur la mesure a été développé pendant les travaux de cette thèse. La
structure du modèle est la même de celle de la Figure 2.6. L’approche de modélisation proposée
consiste à déterminer les paramètres en 2 étapes : la caractéristique statique qui détermine la
variation de la tension aux bornes du MOSFET en fonction du courant et la caractéristique
dynamique qui consiste à déterminer les capacités, les résistances et les inductances des
interconnexions ainsi que la caractéristique de la diode intrinsèque. Les parties qui suivent vont
détailler les méthodes utilisées pour déterminer chacun de ses paramètres.
II.2.1.4.1 Caractéristique statique
La caractéristique statique a été mesurée en utilisant un SMU (Source Measurement Unit) présenté
dans la Figure 2.7. Cette caractéristique donne la relation entre le courant de drain ID et les tensions
VDS pour différentes valeurs de VGS.
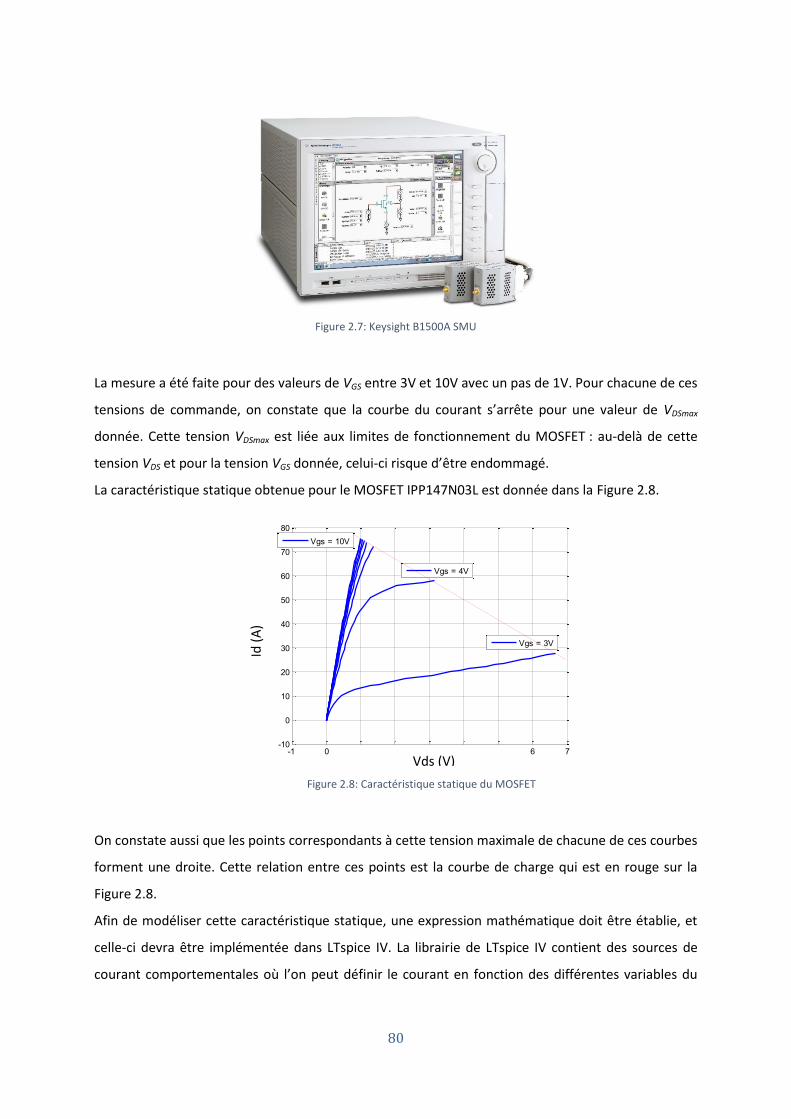
80
Figure 2.7: Keysight B1500A SMU
La mesure a été faite pour des valeurs de VGS entre 3V et 10V avec un pas de 1V. Pour chacune de ces
tensions de commande, on constate que la courbe du courant s’arrête pour une valeur de VDSmax
donnée. Cette tension VDSmax est liée aux limites de fonctionnement du MOSFET : au-delà de cette
tension VDS et pour la tension VGS donnée, celui-ci risque d’être endommagé.
La caractéristique statique obtenue pour le MOSFET IPP147N03L est donnée dans la Figure 2.8.
Figure 2.8: Caractéristique statique du MOSFET
On constate aussi que les points correspondants à cette tension maximale de chacune de ces courbes
forment une droite. Cette relation entre ces points est la courbe de charge qui est en rouge sur la
Figure 2.8.
Afin de modéliser cette caractéristique statique, une expression mathématique doit être établie, et
celle-ci devra être implémentée dans LTspice IV. La librairie de LTspice IV contient des sources de
courant comportementales où l’on peut définir le courant en fonction des différentes variables du
-1 0 1 2 3 4 5 6 7-10
0
10
20
30
40
50
60
70
80
Vds[V]
Id[A
]
Vgs = 3V
Vgs = 4V
Vgs = 10V
Id (
A)
Vds (V)
81
circuit ou selon des expressions analytiques explicites. La modélisation de la caractéristique statique
que nous avons mise en œuvre fait appel à la fonction de Gompertz exprimée dans (2.12) :
(2.12)
où a, b et c sont des constantes.
Le courant du drain est dépendant de la tension VDS, ce que l’on modélise à l’aide d’une fonction arc
tangente. (2.14) donne l’expression du courant de drain modélisé en fonction de VDS et VGS :
(2.13)
Une identification a été réalisée sous le logiciel Matlab en utilisant l’outil « Curve Fitting Toolbox »
pour obtenir un modèle qui donne une caractéristique statique proche de celle de la mesure. Les
valeurs obtenues pour les constantes sont les suivantes :
a=68,41 ;
b=-49,2077 ;
c=-1,1284 ;
d=1,2891 ;
f=1.0336.
II.2.1.4.2 Modèle dynamique
En complément de la caractéristique statique du composant, des éléments parasites peuvent être
identifiés. En effet, chacune des trois connectiques présente naturellement un effet inductif et
résistif qui peuvent influer sur le comportement du composant en haute fréquence. Mais le MOSFET
présente aussi un comportement capacitif à ne pas négliger : du point de vue de la grille, celui-ci est
évident car il est inhérent à la technologie (commande en tension).
Afin de tenir compte de ces éléments parasites, notre démarche consiste à caractériser cette fois
encore le composant, en utilisant un analyseur de réseau. En chaque paire des trois connectiques du
commutateur, nous pouvons identifier un circuit équivalent R-L-C série. Cependant, nous avons
souhaité pouvoir tenir compte de l’évolution des capacités en fonction des tensions qui leurs sont
appliquées.
Pour cela, nous avons utilisé une polarisation extérieure au moyen d’un bias-T. Celui-ci permet
d’imposer une composante continue de tension au composant sous test tout en effectuant la mesure
par ailleurs.
La démarche de caractérisation en utilisant l’analyseur de réseau n’est pas la démarche classique
utilisée. En fait, la datasheet du composant donne la variation en fonction de la tension VDS des
capacités mesurées en utilisant des MFCMU (Multi Frequency Capacitance Measurement Unit). Trois
mesures sont effectuées en utilisant le Agilent B1520A [61]pour avoir ces résultats :
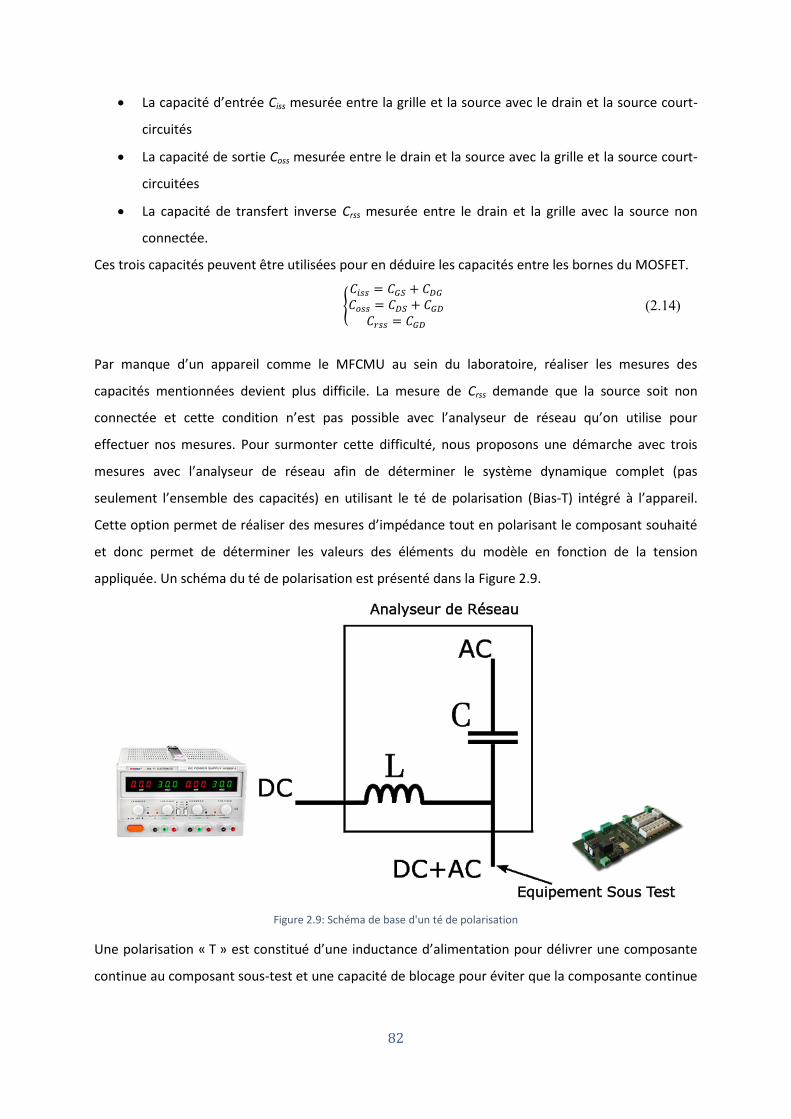
82
La capacité d’entrée Ciss mesurée entre la grille et la source avec le drain et la source court-
circuités
La capacité de sortie Coss mesurée entre le drain et la source avec la grille et la source court-
circuitées
La capacité de transfert inverse Crss mesurée entre le drain et la grille avec la source non
connectée.
Ces trois capacités peuvent être utilisées pour en déduire les capacités entre les bornes du MOSFET.
(2.14)
Par manque d’un appareil comme le MFCMU au sein du laboratoire, réaliser les mesures des
capacités mentionnées devient plus difficile. La mesure de Crss demande que la source soit non
connectée et cette condition n’est pas possible avec l’analyseur de réseau qu’on utilise pour
effectuer nos mesures. Pour surmonter cette difficulté, nous proposons une démarche avec trois
mesures avec l’analyseur de réseau afin de déterminer le système dynamique complet (pas
seulement l’ensemble des capacités) en utilisant le té de polarisation (Bias-T) intégré à l’appareil.
Cette option permet de réaliser des mesures d’impédance tout en polarisant le composant souhaité
et donc permet de déterminer les valeurs des éléments du modèle en fonction de la tension
appliquée. Un schéma du té de polarisation est présenté dans la Figure 2.9.
Figure 2.9: Schéma de base d'un té de polarisation
Une polarisation « T » est constitué d’une inductance d’alimentation pour délivrer une composante
continue au composant sous-test et une capacité de blocage pour éviter que la composante continue

83
circule dans l’analyseur de réseau. En général, le choix des valeurs de L et C est fait afin de respecter
les conditions de (2.15) :
(2.15)
Le côté AC est relié à la source du signal de l’analyseur de réseau, le côté DC à la source de
polarisation externe et la troisième borne est reliée au composant sous-test. Le té de polarisation est
utilisé pour insérer une composante continue dans un signal alternatif. Il est généralement placé à la
terminaison d’un câble coaxial pour transmettre la composante continue à partir d’une source
externe au câble coaxial.
Revenons au choix des mesures à effectuer afin d’avoir les informations nécessaires pour déterminer
le système dynamique. Rappelons que les mesures effectuées par un MFCMU utilisent une
polarisation entre le drain et la source. Les mesures effectuées avec l’analyseur de réseau utilisent
une polarisation entre les deux bornes de l’impédance mesurée. Cela veut dire que la mesure de
l’impédance entre la grille et la source par exemple se fait en fonction de la tension entre la grille et
la source.
1. La première mesure effectuée est la mesure d’impédance entre le drain et la source avec la
grille et source court-circuitées. Avec cette mesure, on pourra en déduire la capacité Coss
mais aussi d’autres informations sur les inductances et résistances du système.
2. La deuxième mesure est celle de l’impédance entre le drain et la source avec la grille et le
drain en court-circuit.
3. La troisième mesure est celle de l’impédance entre la grille et la source avec le drain et la
source en court-circuit.
Analysons chacune de ces mesures et la méthode utilisée pour déterminer la totalité du système
dynamique.
II.2.1.4.2.1 Mesure de l’impédance Drain-Source 1
Cette mesure permet de déduire l’impédance entre le drain et la source en appliquant une tension
VDS tout en court-circuitant la grille et la source. Le montage équivalent est présenté sur la Figure
2.10.

84
Figure 2.10: Modèle MOSFET – cas mesure DS avec GS en CC
La tension VDS varie entre 0 et 25V. Les variations du module et de la phase de l’impédance en fonction de la fréquence sont présentées respectivement dans la Figure 2.11 et Figure 2.12.
Figure 2.11: Module de l'impédance entre le drain et la source en fonction de la fréquence
105
106
107
108
109
10-1
100
101
102
103
104
Fréquence [Hz]
Module
[O
hm
s]
Module de l'impédance en fonction de la fréquence
Vds=0V
Vds=1V
Vds=2V
Vds=3V
Vds=4V
Vds=5V
Vds=6V
Vds=7V
Vds=8V
Vds=9V
Vds=10V
Vds=12V
Vds=14V
Vds=16V
Vds=18V
Vds=20V
Mo
du
le (
)
Fréquence (Hz)
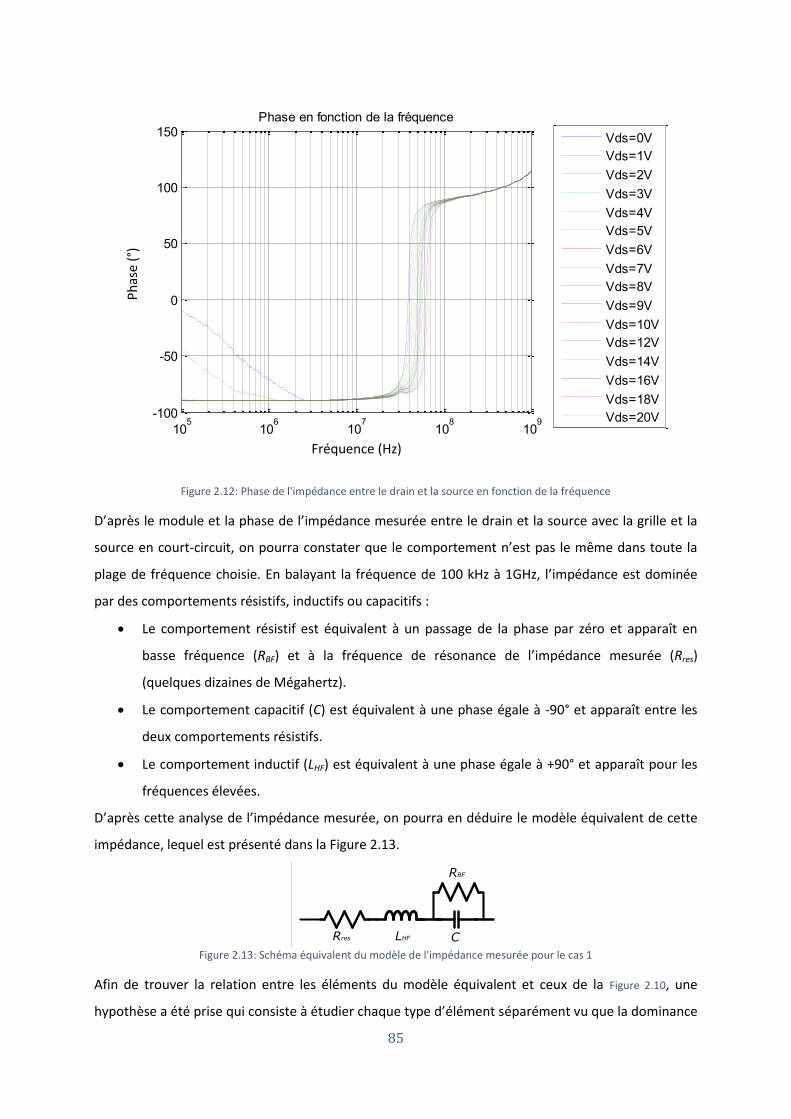
85
Figure 2.12: Phase de l'impédance entre le drain et la source en fonction de la fréquence
D’après le module et la phase de l’impédance mesurée entre le drain et la source avec la grille et la
source en court-circuit, on pourra constater que le comportement n’est pas le même dans toute la
plage de fréquence choisie. En balayant la fréquence de 100 kHz à 1GHz, l’impédance est dominée
par des comportements résistifs, inductifs ou capacitifs :
Le comportement résistif est équivalent à un passage de la phase par zéro et apparaît en
basse fréquence (RBF) et à la fréquence de résonance de l’impédance mesurée (Rres)
(quelques dizaines de Mégahertz).
Le comportement capacitif (C) est équivalent à une phase égale à -90° et apparaît entre les
deux comportements résistifs.
Le comportement inductif (LHF) est équivalent à une phase égale à +90° et apparaît pour les
fréquences élevées.
D’après cette analyse de l’impédance mesurée, on pourra en déduire le modèle équivalent de cette
impédance, lequel est présenté dans la Figure 2.13.
Figure 2.13: Schéma équivalent du modèle de l'impédance mesurée pour le cas 1
Afin de trouver la relation entre les éléments du modèle équivalent et ceux de la Figure 2.10, une
hypothèse a été prise qui consiste à étudier chaque type d’élément séparément vu que la dominance
105
106
107
108
109
-100
-50
0
50
100
150
Fréquence [Hz]
Phase [
°]
Phase en fonction de la fréquence
Vds=0V
Vds=1V
Vds=2V
Vds=3V
Vds=4V
Vds=5V
Vds=6V
Vds=7V
Vds=8V
Vds=9V
Vds=10V
Vds=12V
Vds=14V
Vds=16V
Vds=18V
Vds=20V
Ph
ase
(°)
Fréquence (Hz)
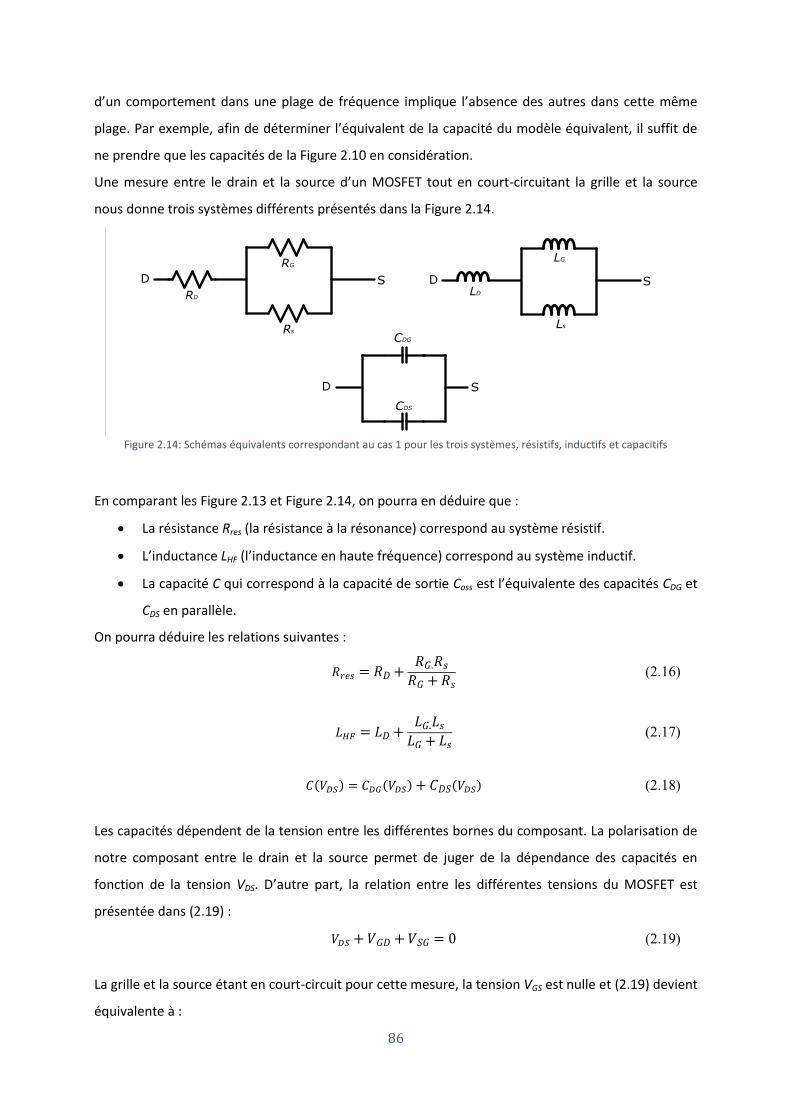
86
d’un comportement dans une plage de fréquence implique l’absence des autres dans cette même
plage. Par exemple, afin de déterminer l’équivalent de la capacité du modèle équivalent, il suffit de
ne prendre que les capacités de la Figure 2.10 en considération.
Une mesure entre le drain et la source d’un MOSFET tout en court-circuitant la grille et la source
nous donne trois systèmes différents présentés dans la Figure 2.14.
Figure 2.14: Schémas équivalents correspondant au cas 1 pour les trois systèmes, résistifs, inductifs et capacitifs
En comparant les Figure 2.13 et Figure 2.14, on pourra en déduire que :
La résistance Rres (la résistance à la résonance) correspond au système résistif.
L’inductance LHF (l’inductance en haute fréquence) correspond au système inductif.
La capacité C qui correspond à la capacité de sortie Coss est l’équivalente des capacités CDG et
CDS en parallèle.
On pourra déduire les relations suivantes :
(2.16)
(2.17)
(2.18)
Les capacités dépendent de la tension entre les différentes bornes du composant. La polarisation de
notre composant entre le drain et la source permet de juger de la dépendance des capacités en
fonction de la tension VDS. D’autre part, la relation entre les différentes tensions du MOSFET est
présentée dans (2.19) :
(2.19)
La grille et la source étant en court-circuit pour cette mesure, la tension VGS est nulle et (2.19) devient
équivalente à :
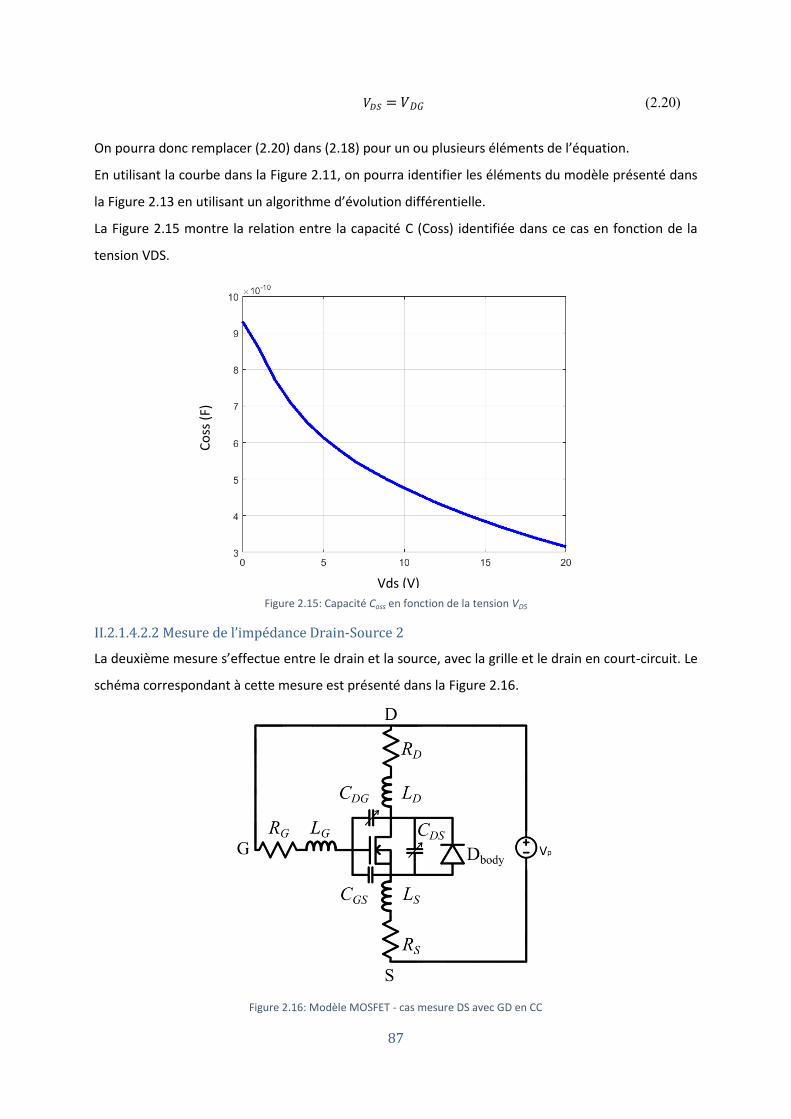
87
(2.20)
On pourra donc remplacer (2.20) dans (2.18) pour un ou plusieurs éléments de l’équation.
En utilisant la courbe dans la Figure 2.11, on pourra identifier les éléments du modèle présenté dans
la Figure 2.13 en utilisant un algorithme d’évolution différentielle.
La Figure 2.15 montre la relation entre la capacité C (Coss) identifiée dans ce cas en fonction de la
tension VDS.
Figure 2.15: Capacité Coss en fonction de la tension VDS
II.2.1.4.2.2 Mesure de l’impédance Drain-Source 2
La deuxième mesure s’effectue entre le drain et la source, avec la grille et le drain en court-circuit. Le
schéma correspondant à cette mesure est présenté dans la Figure 2.16.
Figure 2.16: Modèle MOSFET - cas mesure DS avec GD en CC
Co
ss (
F)
Vds (V)
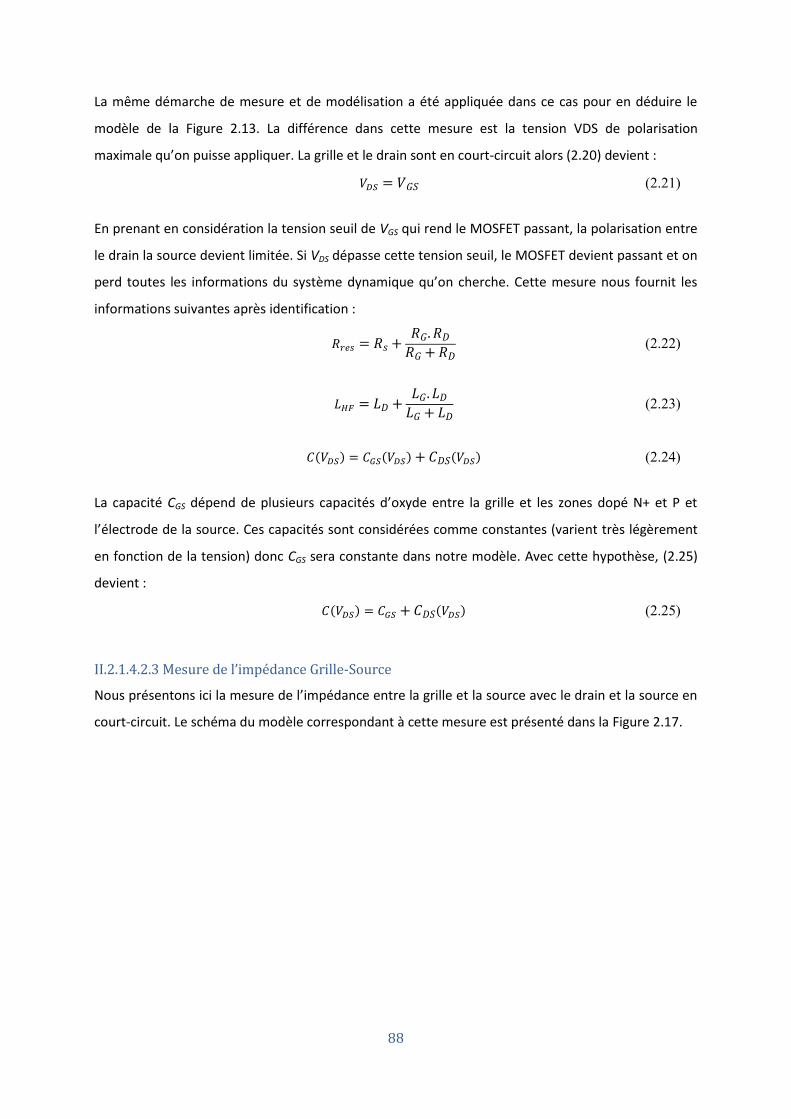
88
La même démarche de mesure et de modélisation a été appliquée dans ce cas pour en déduire le
modèle de la Figure 2.13. La différence dans cette mesure est la tension VDS de polarisation
maximale qu’on puisse appliquer. La grille et le drain sont en court-circuit alors (2.20) devient :
(2.21)
En prenant en considération la tension seuil de VGS qui rend le MOSFET passant, la polarisation entre
le drain la source devient limitée. Si VDS dépasse cette tension seuil, le MOSFET devient passant et on
perd toutes les informations du système dynamique qu’on cherche. Cette mesure nous fournit les
informations suivantes après identification :
(2.22)
(2.23)
(2.24)
La capacité CGS dépend de plusieurs capacités d’oxyde entre la grille et les zones dopé N+ et P et
l’électrode de la source. Ces capacités sont considérées comme constantes (varient très légèrement
en fonction de la tension) donc CGS sera constante dans notre modèle. Avec cette hypothèse, (2.25)
devient :
(2.25)
II.2.1.4.2.3 Mesure de l’impédance Grille-Source
Nous présentons ici la mesure de l’impédance entre la grille et la source avec le drain et la source en
court-circuit. Le schéma du modèle correspondant à cette mesure est présenté dans la Figure 2.17.
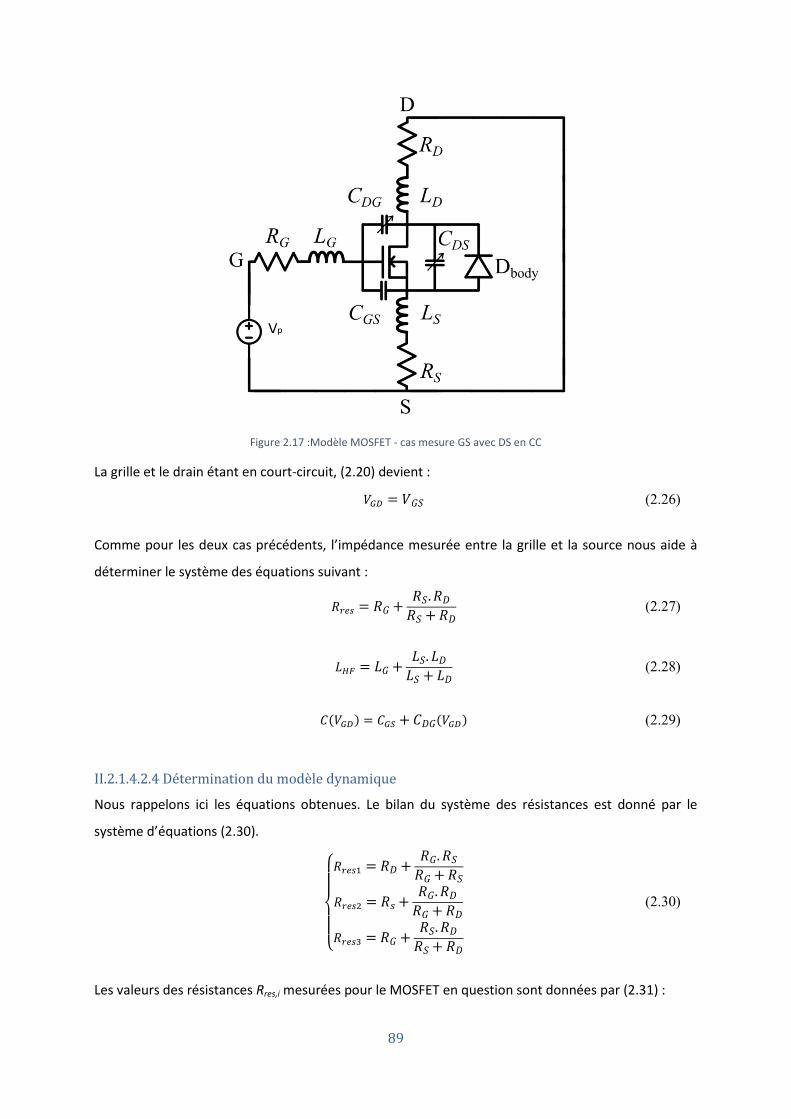
89
Figure 2.17 :Modèle MOSFET - cas mesure GS avec DS en CC
La grille et le drain étant en court-circuit, (2.20) devient :
(2.26)
Comme pour les deux cas précédents, l’impédance mesurée entre la grille et la source nous aide à
déterminer le système des équations suivant :
(2.27)
(2.28)
(2.29)
II.2.1.4.2.4 Détermination du modèle dynamique
Nous rappelons ici les équations obtenues. Le bilan du système des résistances est donné par le
système d’équations (2.30).
(2.30)
Les valeurs des résistances Rres,i mesurées pour le MOSFET en question sont données par (2.31) :

90
(2.31)
Le système des résistances est un système de trois équations à trois inconnues mais il est non
linéaire. Nous parvenons à une résolution rapide de ce système par la fonction « fsolve » de Matlab.
Les résultats obtenus sont présentés dans (2.32) :
(2.32)
La même démarche a été appliquée pour le système des inductances. Les équations (2.33) et (2.34)
présentent les résultats obtenus :
(2.33)
(2.34)
La mesure de la caractéristique statique du MOSFET a été effectuée entre le drain et la source tout
en excitant la commande du composant actif. Cette mesure modélisée par une source de courant
dans (2.13) prend en considération les résistances et inductances du drain et de la source. Pour ne
pas modéliser ces éléments deux fois, seule la grille aura sa résistance et inductance modélisées
séparément.
Le troisième système à déterminer est celui des capacités qui varient en fonction de la tension. Les
mesures nous donnent le système d’équations suivant :
(2.35)
Puisque la capacité CGS est constante en fonction de la tension, la détermination de cette capacité
pourra être réalisée en un point et sera valable sur l’ensemble des polarisations. En prenant comme
valeur nulle les tensions du système (2.35), la détermination de la capacité CGS devient triviale.
(2.36)
Maintenant que CGS est connue, le système des équations peut être résolu afin de déterminer la
capacité CDS en fonction de la tension VDS et la capacité CDG en fonction de la tension VDG ou VDS.
La capacité CGS a été déterminée à 0,846 nF. Par ailleurs les Figure 2.18 et Figure 2.19 montrent
respectivement la variation des capacités CDS et CDG identifiées par (2.35) en fonction de VDS.
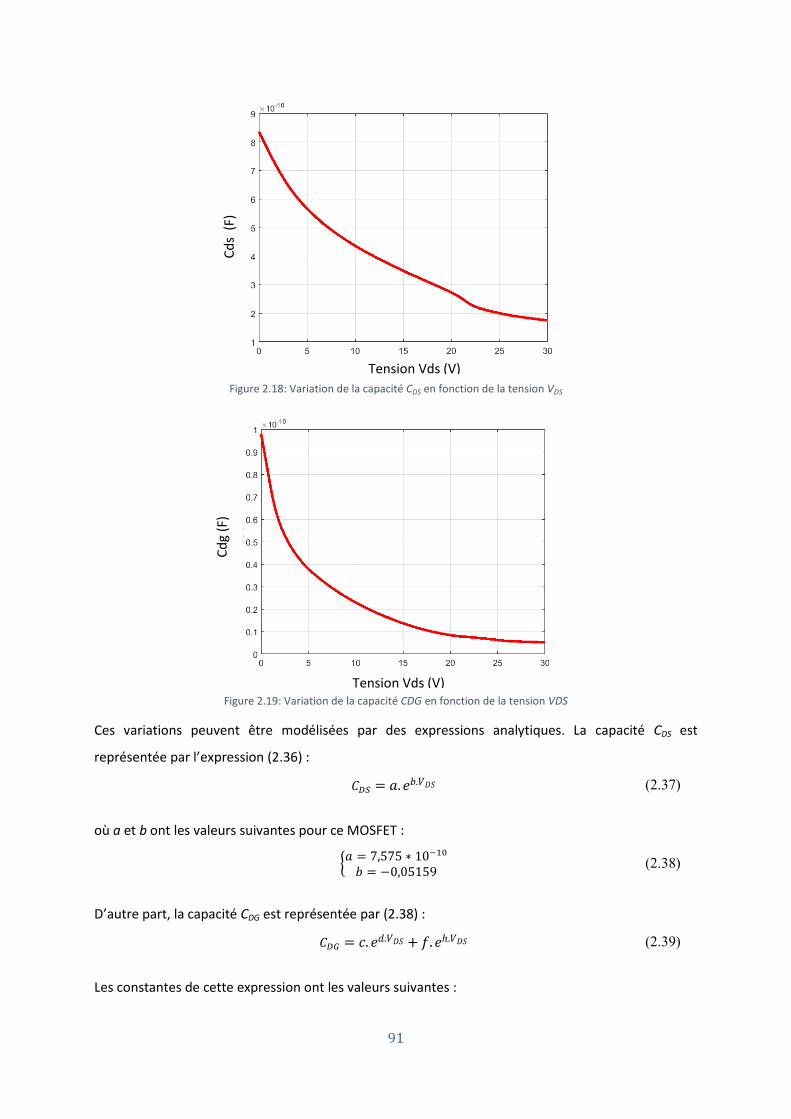
91
Figure 2.18: Variation de la capacité CDS en fonction de la tension VDS
Figure 2.19: Variation de la capacité CDG en fonction de la tension VDS
Ces variations peuvent être modélisées par des expressions analytiques. La capacité CDS est
représentée par l’expression (2.36) :
(2.37)
où a et b ont les valeurs suivantes pour ce MOSFET :
(2.38)
D’autre part, la capacité CDG est représentée par (2.38) :
(2.39)
Les constantes de cette expression ont les valeurs suivantes :
Cd
s (
F)
Tension Vds (V)
Cd
g (F
)
Tension Vds (V)

92
(2.40)
Le logiciel de simulation LTspice IV n’accepte pas une valeur de capacité variable. Afin de pouvoir
modéliser les capacités dans LTspice IV, plusieurs méthodes existent. Nous allons expliquer la
solution choisie pour implémenter cette variation qui est rapide à simuler et ne présente pas de
problème de convergence.
Un condensateur est défini comme un composant qui a une charge dépendante de la tension. Sa
capacité est définie comme la dérivée de cette charge par rapport à la tension.
(2.41)
En intégrant (2.41), on trouvera l’expression de la charge en fonction de la capacité variable :
(2.42)
Et alors (2.36) et (2.38) deviennent :
(2.43)
(2.44)
La modélisation de la capacité par une source de courant comportementale est la solution stable et
rapide qu’on cherchait au problème posé. (2.46) montre la relation entre le courant dans un
condensateur et ces caractéristiques.
(2.45)
Avec la modélisation du système des capacités du composant actif, le modèle se basant sur la
mesure est complet car il contient les caractéristiques statique et dynamique.
II.2.2 Modélisation dans le domaine fréquentiel
La représentation dans le domaine fréquentiel est l’image spectrale des perturbations du domaine
temporel [71]. Pour l’obtenir, nous choisissons d’utiliser la transformée de Laplace. Les quatre
sources équivalentes que nous considérerons seront basées sur une forme d’onde carrée, une forme
d’onde trapézoïdale, une forme d’onde trapézoïdale non régulière et une forme d’onde trapézoïdale
non régulière avec oscillations. Le principe de cette représentation est de remplacer les composants
non-linéaires du circuit (le MOSFET) par des modèles de sources fréquentielles équivalentes (source

93
de tension pour le MOSFET qui représente sa tension VDS et source de courant pour la diode qui
représente le courant qui la traverse). Une simulation temporelle est nécessaire pour établir le
dernier modèle, afin de quantifier les variations de potentiels et de courant que doivent générer ces
sources. Afin de rendre le signal périodique, la transformée de Laplace d’une forme d’onde est
multipliée par le double de la fréquence fondamentale de la forme d’onde.
II.2.2.1 Forme d’onde carrée
La Figure 2.20 représente la forme d’onde carrée (tension ou courant), où A et T sont respectivement
l’amplitude et la période du signal (source de perturbation) et α le rapport cyclique.
Figure 2.20: Source de perturbation équivalente dans le domaine temporel - forme d'onde carrée
La forme d’onde carrée est une source on/off idéale. La transformée de Laplace d’une telle
perturbation est donnée dans (2.46), qui peut être implémentée en utilisant les sources de tension et
de courant comportementales de LTspice III.
(2.46)
II.2.2.2 Forme d’onde trapézoïdale
Pour être plus réaliste, il paraît intéressant de limiter le temps de montée et de descente de la
perturbation dans le domaine temporel. La Figure 2.21 décrit les paramètres de la forme d’onde
trapézoïdale où tmontée et tdescente sont respectivement le temps de montée et de descente du signal. A
est la valeur maximale du signal qui reste constante durant le temps α.T.
Figure 2.21: Source de perturbation équivalente dans le domaine temporel - forme d'onde trapézoïdale
Une onde trapézoïdale est obtenue en utilisant la transformée de Laplace :
(2.47)
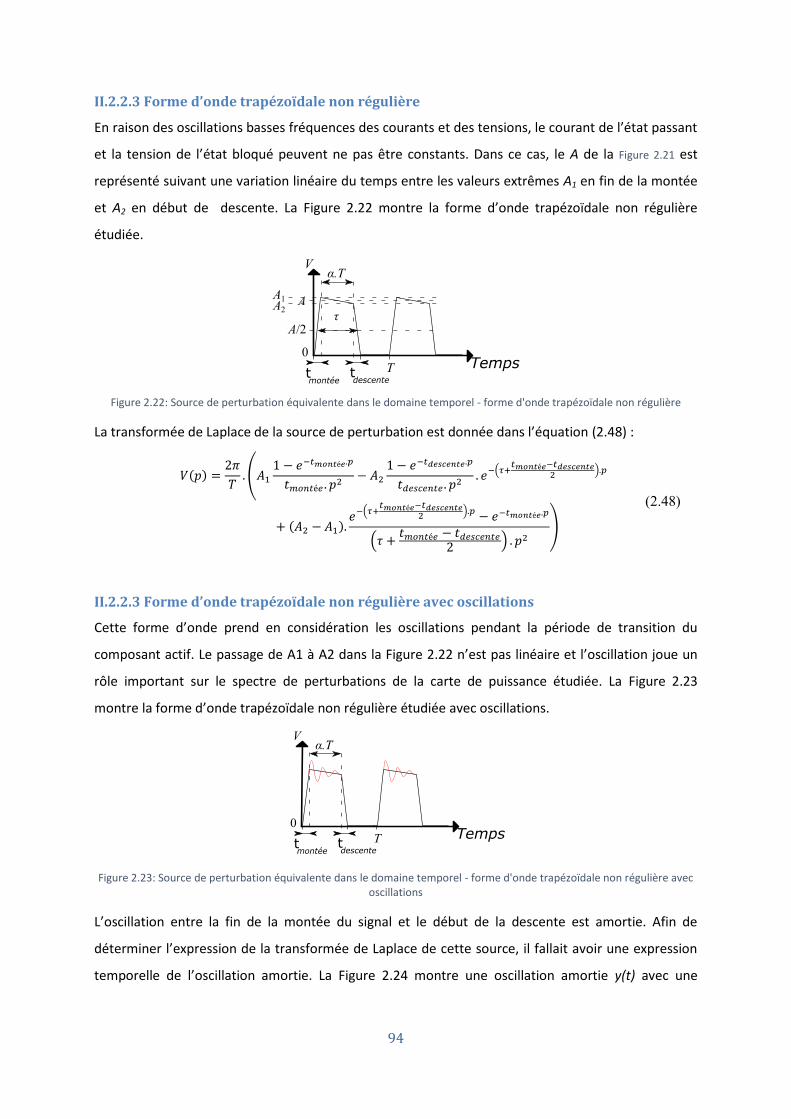
94
II.2.2.3 Forme d’onde trapézoïdale non régulière
En raison des oscillations basses fréquences des courants et des tensions, le courant de l’état passant
et la tension de l’état bloqué peuvent ne pas être constants. Dans ce cas, le A de la Figure 2.21 est
représenté suivant une variation linéaire du temps entre les valeurs extrêmes A1 en fin de la montée
et A2 en début de descente. La Figure 2.22 montre la forme d’onde trapézoïdale non régulière
étudiée.
Figure 2.22: Source de perturbation équivalente dans le domaine temporel - forme d'onde trapézoïdale non régulière
La transformée de Laplace de la source de perturbation est donnée dans l’équation (2.48) :
(2.48)
II.2.2.3 Forme d’onde trapézoïdale non régulière avec oscillations
Cette forme d’onde prend en considération les oscillations pendant la période de transition du
composant actif. Le passage de A1 à A2 dans la Figure 2.22 n’est pas linéaire et l’oscillation joue un
rôle important sur le spectre de perturbations de la carte de puissance étudiée. La Figure 2.23
montre la forme d’onde trapézoïdale non régulière étudiée avec oscillations.
Figure 2.23: Source de perturbation équivalente dans le domaine temporel - forme d'onde trapézoïdale non régulière avec oscillations
L’oscillation entre la fin de la montée du signal et le début de la descente est amortie. Afin de
déterminer l’expression de la transformée de Laplace de cette source, il fallait avoir une expression
temporelle de l’oscillation amortie. La Figure 2.24 montre une oscillation amortie y(t) avec une

95
période T. Afin de pouvoir déterminer l’expression de l’oscillation y(t), il faut identifier plusieurs
paramètres.
Figure 2.24: Oscillation amortie de période T
Le premier paramètre à identifier est le décrément logarithmique δ :
(2.49)
où T est la pseudo-période de l’oscillation, tn le temps correspondant à un maximum ou minimum de
l’oscillation et λ le facteur d’amortissement. Après la détermination de ces paramètres, l’expression
de l’oscillation amortie y(t) sera telle que donnée dans l’équation (2.50) et sa transformée de Laplace
telle que donnée dans l’équation (2.51).
(2.50)
(2.51)
L’expression de (2.48) deviendra :
(2.52)
II.3 Comparaison des modèles
Chacun des modèles présentés dans la partie ci-dessus a des avantages et des inconvénients. Afin de
pouvoir effectuer un choix pertinent du modèle pour une application donnée, on va utiliser un
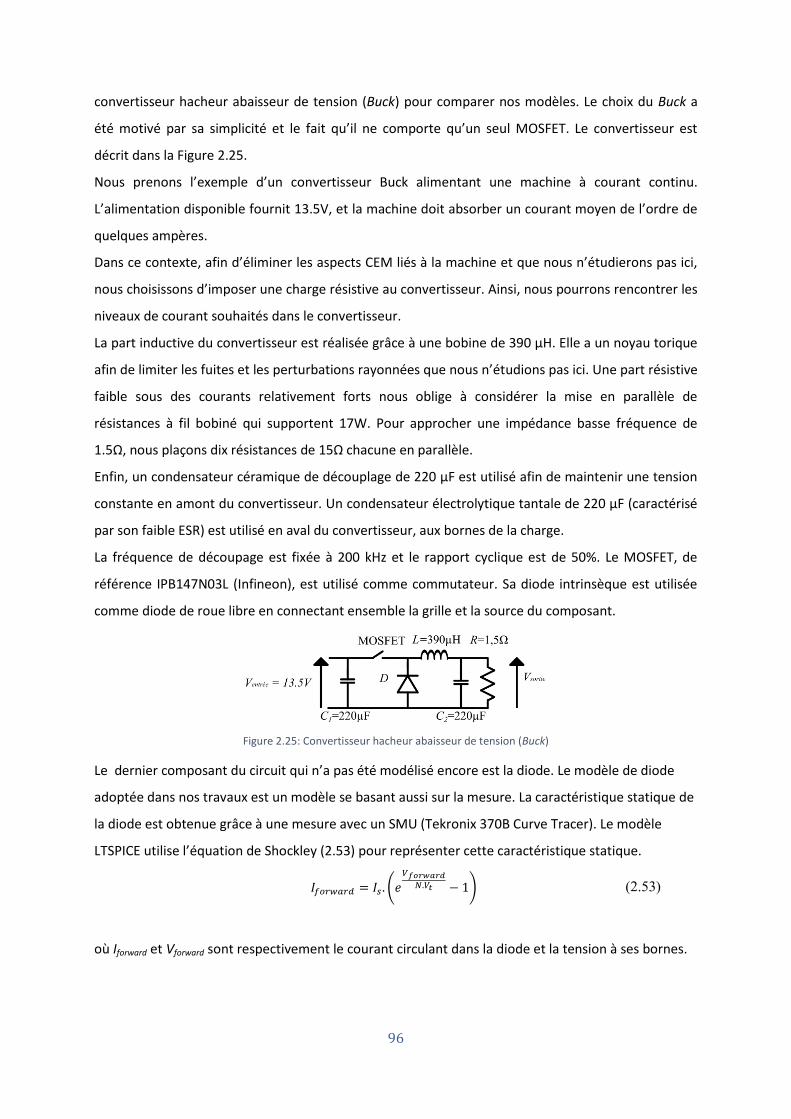
96
convertisseur hacheur abaisseur de tension (Buck) pour comparer nos modèles. Le choix du Buck a
été motivé par sa simplicité et le fait qu’il ne comporte qu’un seul MOSFET. Le convertisseur est
décrit dans la Figure 2.25.
Nous prenons l’exemple d’un convertisseur Buck alimentant une machine à courant continu.
L’alimentation disponible fournit 13.5V, et la machine doit absorber un courant moyen de l’ordre de
quelques ampères.
Dans ce contexte, afin d’éliminer les aspects CEM liés à la machine et que nous n’étudierons pas ici,
nous choisissons d’imposer une charge résistive au convertisseur. Ainsi, nous pourrons rencontrer les
niveaux de courant souhaités dans le convertisseur.
La part inductive du convertisseur est réalisée grâce à une bobine de 390 µH. Elle a un noyau torique
afin de limiter les fuites et les perturbations rayonnées que nous n’étudions pas ici. Une part résistive
faible sous des courants relativement forts nous oblige à considérer la mise en parallèle de
résistances à fil bobiné qui supportent 17W. Pour approcher une impédance basse fréquence de
1.5Ω, nous plaçons dix résistances de 15Ω chacune en parallèle.
Enfin, un condensateur céramique de découplage de 220 µF est utilisé afin de maintenir une tension
constante en amont du convertisseur. Un condensateur électrolytique tantale de 220 µF (caractérisé
par son faible ESR) est utilisé en aval du convertisseur, aux bornes de la charge.
La fréquence de découpage est fixée à 200 kHz et le rapport cyclique est de 50%. Le MOSFET, de
référence IPB147N03L (Infineon), est utilisé comme commutateur. Sa diode intrinsèque est utilisée
comme diode de roue libre en connectant ensemble la grille et la source du composant.
Figure 2.25: Convertisseur hacheur abaisseur de tension (Buck)
Le dernier composant du circuit qui n’a pas été modélisé encore est la diode. Le modèle de diode
adoptée dans nos travaux est un modèle se basant aussi sur la mesure. La caractéristique statique de
la diode est obtenue grâce à une mesure avec un SMU (Tekronix 370B Curve Tracer). Le modèle
LTSPICE utilise l’équation de Shockley (2.53) pour représenter cette caractéristique statique.
(2.53)
où Iforward et Vforward sont respectivement le courant circulant dans la diode et la tension à ses bornes.

97
Figure 2.26: Schéma d'une diode
Is est le courant de saturation, N est le coefficient d’émission et Vt la tension thermique. La Figure
2.27 montre une comparaison entre la mesure et la simulation. Le modèle est obtenu avec Is=1pA,
N=1 et Vt=26mV.
Figure 2.27: Caractéristique statistique de la diode du MOSFET - Mesure et modèle
Afin d’isoler les perturbations CEM conduites émises par un système, deux réseaux stabilisateurs
d’impédance de ligne (RSIL) sont nécessaires. Ils sont placés entre l’alimentation et le reste du circuit.
Les caractéristiques de ces RSIL sont imposées par la norme CISPR 25 (inductance de 5 µH). La Figure
2.28 représente le modèle électrique du RSIL.
Figure 2.28: Modèle électrique du RSIL (Schwarzbeck NNBM 8124)
Le rôle de ces RSIL pourra être résumé par les points suivants :
- Assurer la reproductibilité des mesures en fixant l’impédance de sortie du secteur vue par le
dispositif sous test ;
- Filtrer les perturbations provenant du réseau E.D.F ;
- Filtrer les perturbations émises par le DST de manière à ne pas polluer le secteur ;
Co
urb
e d
e d
iod
e (A
)
Tension (V)
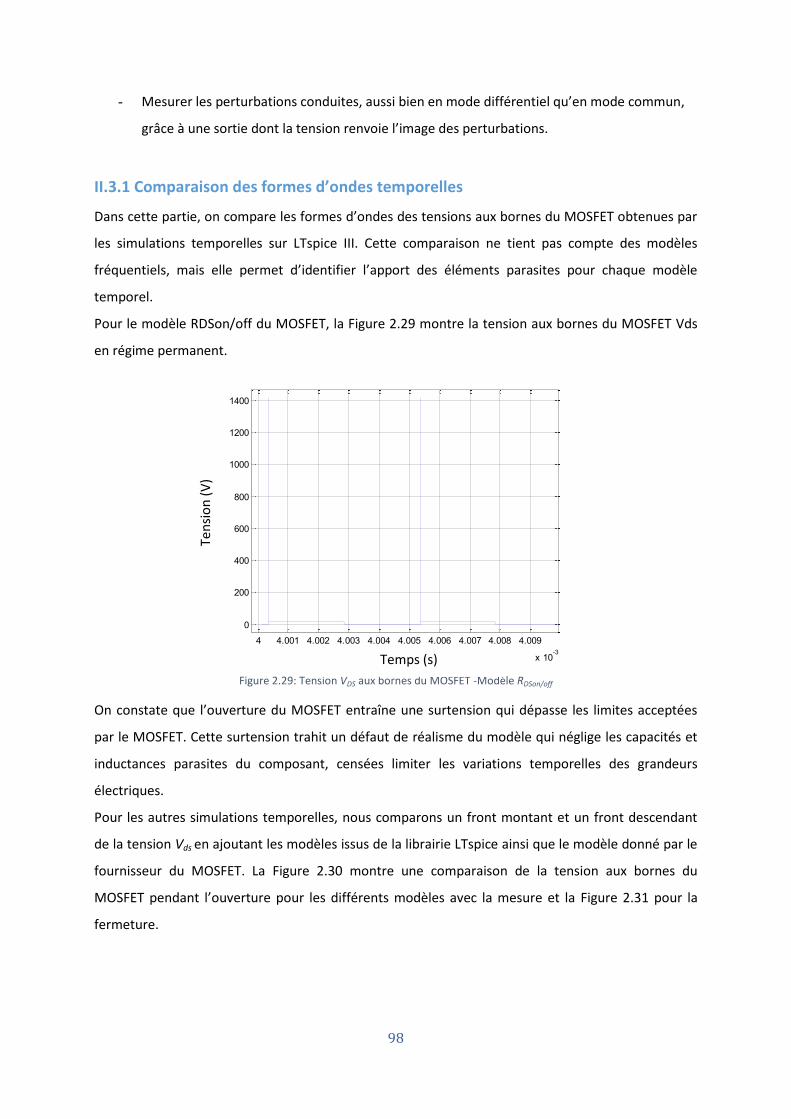
98
- Mesurer les perturbations conduites, aussi bien en mode différentiel qu’en mode commun,
grâce à une sortie dont la tension renvoie l’image des perturbations.
II.3.1 Comparaison des formes d’ondes temporelles
Dans cette partie, on compare les formes d’ondes des tensions aux bornes du MOSFET obtenues par
les simulations temporelles sur LTspice III. Cette comparaison ne tient pas compte des modèles
fréquentiels, mais elle permet d’identifier l’apport des éléments parasites pour chaque modèle
temporel.
Pour le modèle RDSon/off du MOSFET, la Figure 2.29 montre la tension aux bornes du MOSFET Vds
en régime permanent.
Figure 2.29: Tension VDS aux bornes du MOSFET -Modèle RDSon/off
On constate que l’ouverture du MOSFET entraîne une surtension qui dépasse les limites acceptées
par le MOSFET. Cette surtension trahit un défaut de réalisme du modèle qui néglige les capacités et
inductances parasites du composant, censées limiter les variations temporelles des grandeurs
électriques.
Pour les autres simulations temporelles, nous comparons un front montant et un front descendant
de la tension Vds en ajoutant les modèles issus de la librairie LTspice ainsi que le modèle donné par le
fournisseur du MOSFET. La Figure 2.30 montre une comparaison de la tension aux bornes du
MOSFET pendant l’ouverture pour les différents modèles avec la mesure et la Figure 2.31 pour la
fermeture.
4 4.001 4.002 4.003 4.004 4.005 4.006 4.007 4.008 4.009
x 10-3
0
200
400
600
800
1000
1200
1400
Temps [s]
Tensio
n [
V]
Ten
sio
n (
V)
Temps (s)
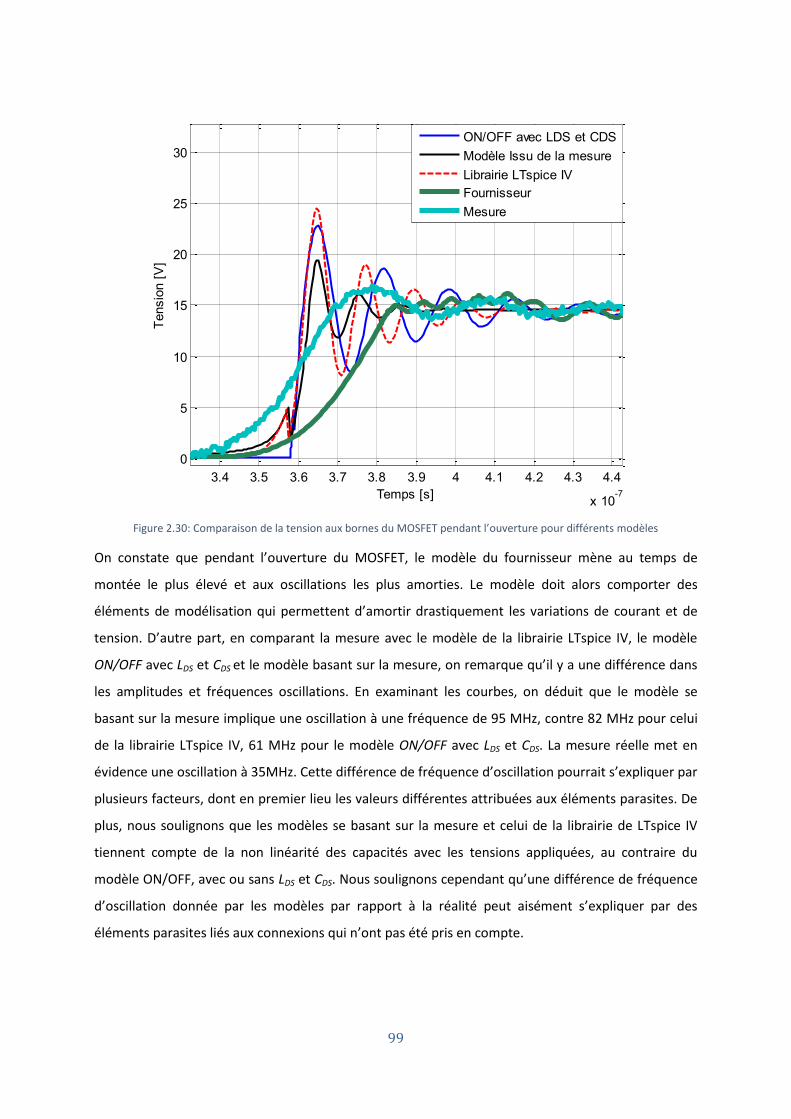
99
Figure 2.30: Comparaison de la tension aux bornes du MOSFET pendant l’ouverture pour différents modèles
On constate que pendant l’ouverture du MOSFET, le modèle du fournisseur mène au temps de
montée le plus élevé et aux oscillations les plus amorties. Le modèle doit alors comporter des
éléments de modélisation qui permettent d’amortir drastiquement les variations de courant et de
tension. D’autre part, en comparant la mesure avec le modèle de la librairie LTspice IV, le modèle
ON/OFF avec LDS et CDS et le modèle basant sur la mesure, on remarque qu’il y a une différence dans
les amplitudes et fréquences oscillations. En examinant les courbes, on déduit que le modèle se
basant sur la mesure implique une oscillation à une fréquence de 95 MHz, contre 82 MHz pour celui
de la librairie LTspice IV, 61 MHz pour le modèle ON/OFF avec LDS et CDS. La mesure réelle met en
évidence une oscillation à 35MHz. Cette différence de fréquence d’oscillation pourrait s’expliquer par
plusieurs facteurs, dont en premier lieu les valeurs différentes attribuées aux éléments parasites. De
plus, nous soulignons que les modèles se basant sur la mesure et celui de la librairie de LTspice IV
tiennent compte de la non linéarité des capacités avec les tensions appliquées, au contraire du
modèle ON/OFF, avec ou sans LDS et CDS. Nous soulignons cependant qu’une différence de fréquence
d’oscillation donnée par les modèles par rapport à la réalité peut aisément s’expliquer par des
éléments parasites liés aux connexions qui n’ont pas été pris en compte.
3.4 3.5 3.6 3.7 3.8 3.9 4 4.1 4.2 4.3 4.4
x 10-7
0
5
10
15
20
25
30
Temps [s]
Tensio
n [
V]
ON/OFF avec LDS et CDS
Modèle Issu de la mesure
Librairie LTspice IV
Fournisseur
Mesure
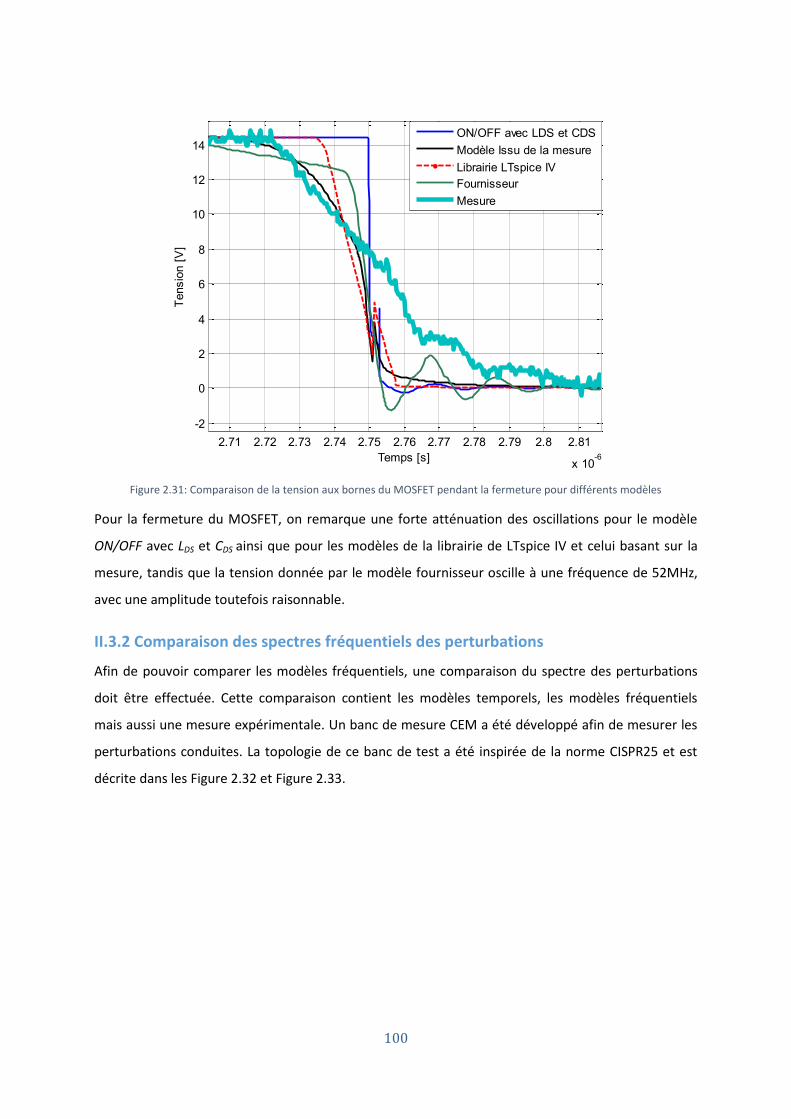
100
Figure 2.31: Comparaison de la tension aux bornes du MOSFET pendant la fermeture pour différents modèles
Pour la fermeture du MOSFET, on remarque une forte atténuation des oscillations pour le modèle
ON/OFF avec LDS et CDS ainsi que pour les modèles de la librairie de LTspice IV et celui basant sur la
mesure, tandis que la tension donnée par le modèle fournisseur oscille à une fréquence de 52MHz,
avec une amplitude toutefois raisonnable.
II.3.2 Comparaison des spectres fréquentiels des perturbations
Afin de pouvoir comparer les modèles fréquentiels, une comparaison du spectre des perturbations
doit être effectuée. Cette comparaison contient les modèles temporels, les modèles fréquentiels
mais aussi une mesure expérimentale. Un banc de mesure CEM a été développé afin de mesurer les
perturbations conduites. La topologie de ce banc de test a été inspirée de la norme CISPR25 et est
décrite dans les Figure 2.32 et Figure 2.33.
2.71 2.72 2.73 2.74 2.75 2.76 2.77 2.78 2.79 2.8 2.81
x 10-6
-2
0
2
4
6
8
10
12
14
Temps [s]
Tensio
n [
V]
ON/OFF avec LDS et CDS
Modèle Issu de la mesure
Librairie LTspice IV
Fournisseur
Mesure
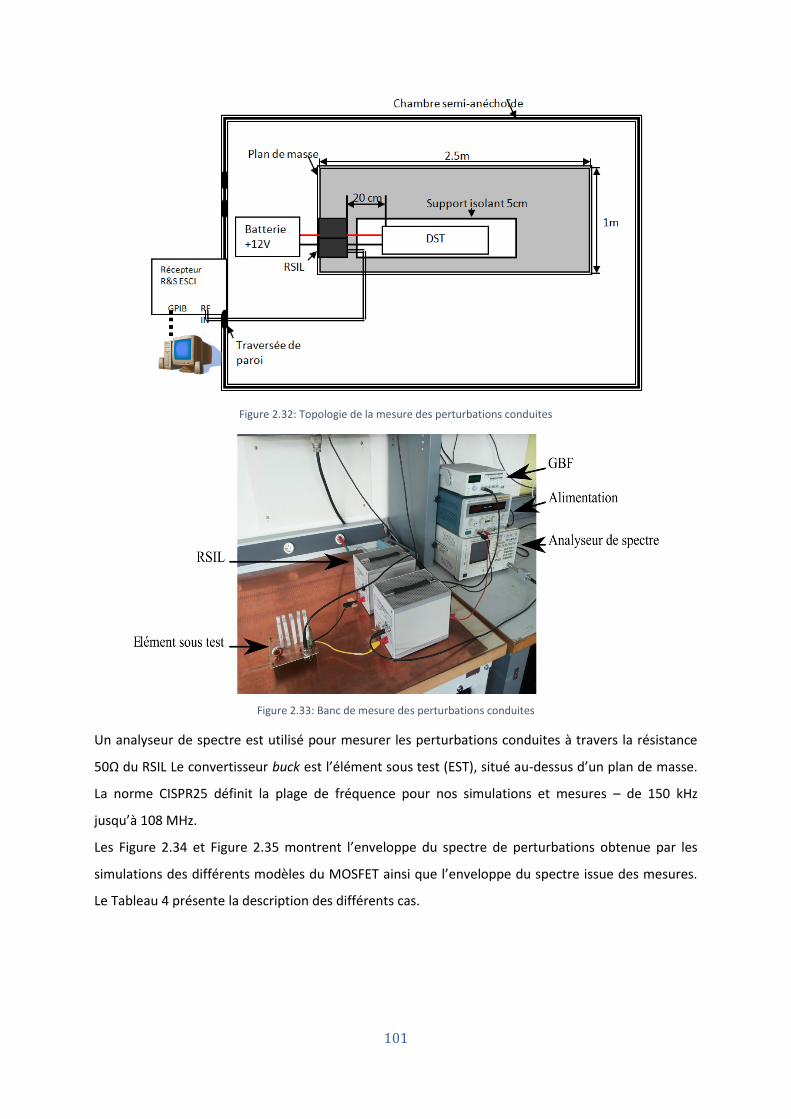
101
Figure 2.32: Topologie de la mesure des perturbations conduites
Figure 2.33: Banc de mesure des perturbations conduites
Un analyseur de spectre est utilisé pour mesurer les perturbations conduites à travers la résistance
50Ω du RSIL Le convertisseur buck est l’élément sous test (EST), situé au-dessus d’un plan de masse.
La norme CISPR25 définit la plage de fréquence pour nos simulations et mesures – de 150 kHz
jusqu’à 108 MHz.
Les Figure 2.34 et Figure 2.35 montrent l’enveloppe du spectre de perturbations obtenue par les
simulations des différents modèles du MOSFET ainsi que l’enveloppe du spectre issue des mesures.
Le Tableau 4 présente la description des différents cas.
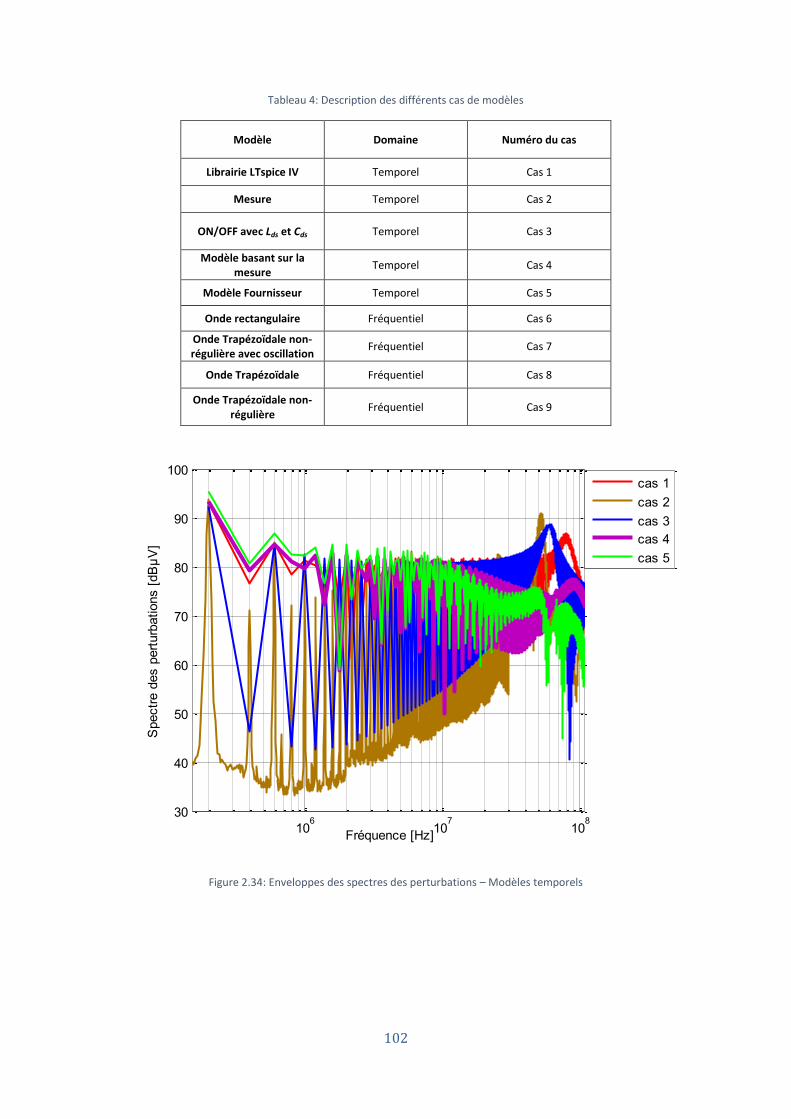
102
Tableau 4: Description des différents cas de modèles
Modèle Domaine Numéro du cas
Librairie LTspice IV Temporel Cas 1
Mesure Temporel Cas 2
ON/OFF avec Lds et Cds Temporel Cas 3
Modèle basant sur la mesure
Temporel Cas 4
Modèle Fournisseur Temporel Cas 5
Onde rectangulaire Fréquentiel Cas 6
Onde Trapézoïdale non-régulière avec oscillation
Fréquentiel Cas 7
Onde Trapézoïdale Fréquentiel Cas 8
Onde Trapézoïdale non-régulière
Fréquentiel Cas 9
Figure 2.34: Enveloppes des spectres des perturbations – Modèles temporels
106
107
108
30
40
50
60
70
80
90
100
Fréquence [Hz]
Spectr
e d
es p
ert
urb
ations [
dB
µV
]
cas 1
cas 2
cas 3
cas 4
cas 5
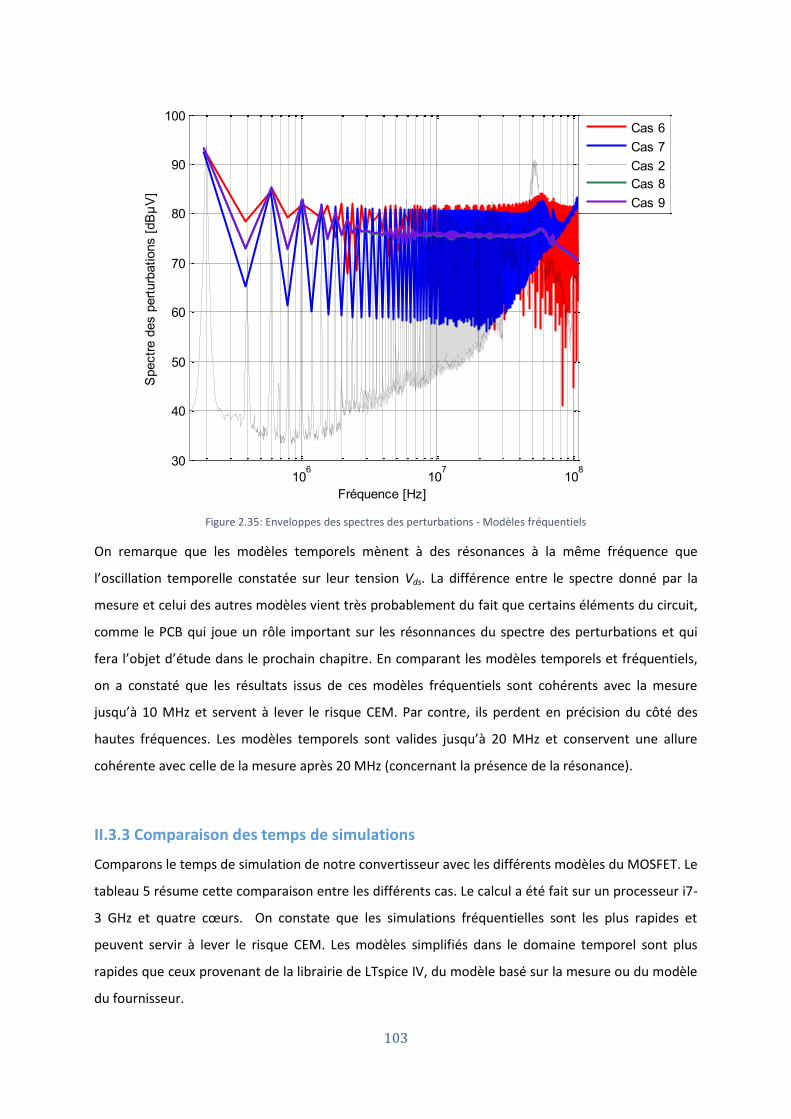
103
Figure 2.35: Enveloppes des spectres des perturbations - Modèles fréquentiels
On remarque que les modèles temporels mènent à des résonances à la même fréquence que
l’oscillation temporelle constatée sur leur tension Vds. La différence entre le spectre donné par la
mesure et celui des autres modèles vient très probablement du fait que certains éléments du circuit,
comme le PCB qui joue un rôle important sur les résonnances du spectre des perturbations et qui
fera l’objet d’étude dans le prochain chapitre. En comparant les modèles temporels et fréquentiels,
on a constaté que les résultats issus de ces modèles fréquentiels sont cohérents avec la mesure
jusqu’à 10 MHz et servent à lever le risque CEM. Par contre, ils perdent en précision du côté des
hautes fréquences. Les modèles temporels sont valides jusqu’à 20 MHz et conservent une allure
cohérente avec celle de la mesure après 20 MHz (concernant la présence de la résonance).
II.3.3 Comparaison des temps de simulations
Comparons le temps de simulation de notre convertisseur avec les différents modèles du MOSFET. Le
tableau 5 résume cette comparaison entre les différents cas. Le calcul a été fait sur un processeur i7-
3 GHz et quatre cœurs. On constate que les simulations fréquentielles sont les plus rapides et
peuvent servir à lever le risque CEM. Les modèles simplifiés dans le domaine temporel sont plus
rapides que ceux provenant de la librairie de LTspice IV, du modèle basé sur la mesure ou du modèle
du fournisseur.
106
107
108
30
40
50
60
70
80
90
100
Fréquence [Hz]
Spectr
e d
es p
ert
urb
ations [
dB
µV
]
Cas 6
Cas 7
Cas 2
Cas 8
Cas 9
104
Tableau 5: Comparaison du temps de simulation des différents modèles
Modèle Domaine Temps de simulations [s]
Onde rectangulaire Fréquentiel 1,1
Onde Trapézoïdale Fréquentiel 1,4
Onde Trapézoïdale non-régulière
Fréquentiel 1,4
Onde Trapézoïdale non-régulière avec oscillation
Fréquentiel 1,42
ON/OFF avec Lds et Cds Temporel 468,6
ON/OFF Temporel 473,8
Librairie LTspice IV Temporel 802,7
Modèle développé Temporel 840
Modèle Fournisseur Temporel 1332,2
II.4 Conclusion
Dans le contexte de l’étude d’une carte de puissance et surtout dans une approche d’optimisation
CEM, le choix du modèle dépendra de l’objectif visé par l’utilisateur. Les modèles fréquentiels sont
rapides et peuvent servir à lever le risque CEM. Par contre, les modèles temporels sont plus précis,
même s’ils restent lents à simuler.
Pour une optimisation engendrant des milliers d’itérations, le temps de simulation est un facteur
important. Pour cette raison, le type de modèle devra être choisi en fonction de la fréquence
maximale visée. Jusqu’à quelques mégahertz, le modèle fréquentiel sera suffisant pour notre
application, au-delà de cette fréquence il faudrait utiliser un modèle temporel, tout en affinant le
modèle par la prise en compte des connectiques, des interactions entre les composants et le
rayonnement du système.

105
106
Chapitre III
Modélisation du PCB
107
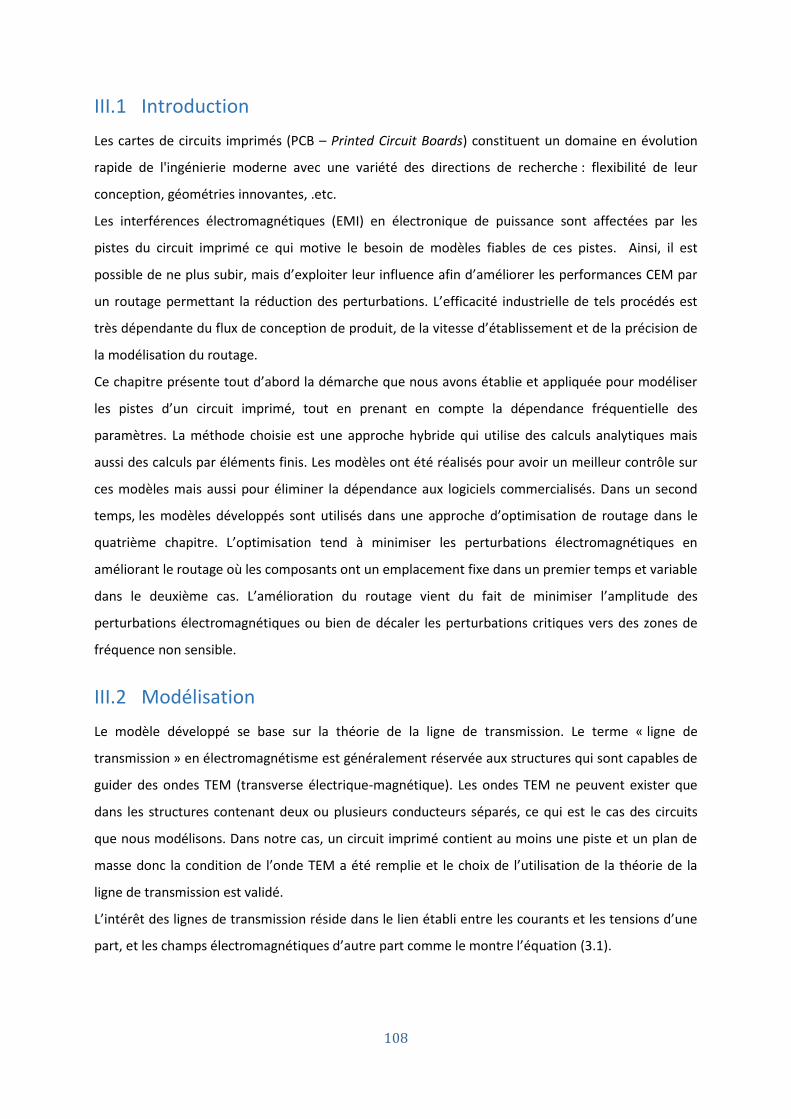
108
III.1 Introduction
Les cartes de circuits imprimés (PCB – Printed Circuit Boards) constituent un domaine en évolution
rapide de l'ingénierie moderne avec une variété des directions de recherche : flexibilité de leur
conception, géométries innovantes, .etc.
Les interférences électromagnétiques (EMI) en électronique de puissance sont affectées par les
pistes du circuit imprimé ce qui motive le besoin de modèles fiables de ces pistes. Ainsi, il est
possible de ne plus subir, mais d’exploiter leur influence afin d’améliorer les performances CEM par
un routage permettant la réduction des perturbations. L’efficacité industrielle de tels procédés est
très dépendante du flux de conception de produit, de la vitesse d’établissement et de la précision de
la modélisation du routage.
Ce chapitre présente tout d’abord la démarche que nous avons établie et appliquée pour modéliser
les pistes d’un circuit imprimé, tout en prenant en compte la dépendance fréquentielle des
paramètres. La méthode choisie est une approche hybride qui utilise des calculs analytiques mais
aussi des calculs par éléments finis. Les modèles ont été réalisés pour avoir un meilleur contrôle sur
ces modèles mais aussi pour éliminer la dépendance aux logiciels commercialisés. Dans un second
temps, les modèles développés sont utilisés dans une approche d’optimisation de routage dans le
quatrième chapitre. L’optimisation tend à minimiser les perturbations électromagnétiques en
améliorant le routage où les composants ont un emplacement fixe dans un premier temps et variable
dans le deuxième cas. L’amélioration du routage vient du fait de minimiser l’amplitude des
perturbations électromagnétiques ou bien de décaler les perturbations critiques vers des zones de
fréquence non sensible.
III.2 Modélisation
Le modèle développé se base sur la théorie de la ligne de transmission. Le terme « ligne de
transmission » en électromagnétisme est généralement réservée aux structures qui sont capables de
guider des ondes TEM (transverse électrique-magnétique). Les ondes TEM ne peuvent exister que
dans les structures contenant deux ou plusieurs conducteurs séparés, ce qui est le cas des circuits
que nous modélisons. Dans notre cas, un circuit imprimé contient au moins une piste et un plan de
masse donc la condition de l’onde TEM a été remplie et le choix de l’utilisation de la théorie de la
ligne de transmission est validé.
L’intérêt des lignes de transmission réside dans le lien établi entre les courants et les tensions d’une
part, et les champs électromagnétiques d’autre part comme le montre l’équation (3.1).
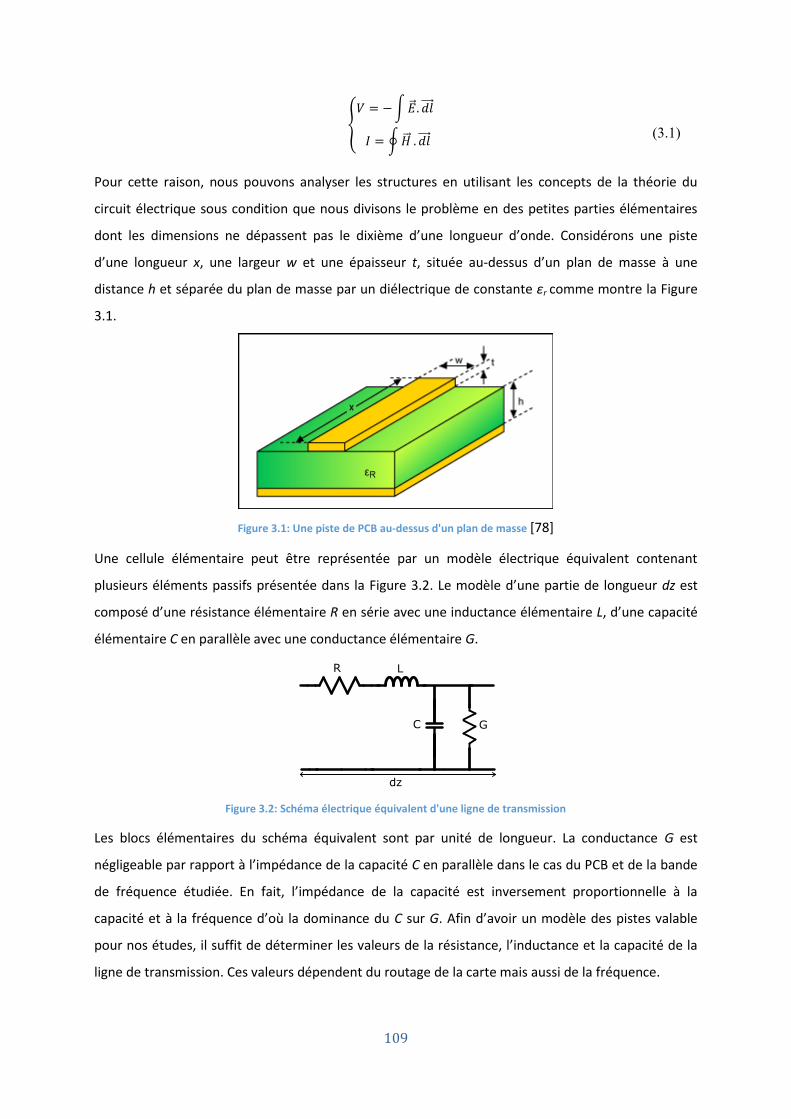
109
(3.1)
Pour cette raison, nous pouvons analyser les structures en utilisant les concepts de la théorie du
circuit électrique sous condition que nous divisons le problème en des petites parties élémentaires
dont les dimensions ne dépassent pas le dixième d’une longueur d’onde. Considérons une piste
d’une longueur x, une largeur w et une épaisseur t, située au-dessus d’un plan de masse à une
distance h et séparée du plan de masse par un diélectrique de constante εr comme montre la Figure
3.1.
Figure 3.1: Une piste de PCB au-dessus d'un plan de masse [78]
Une cellule élémentaire peut être représentée par un modèle électrique équivalent contenant
plusieurs éléments passifs présentée dans la Figure 3.2. Le modèle d’une partie de longueur dz est
composé d’une résistance élémentaire R en série avec une inductance élémentaire L, d’une capacité
élémentaire C en parallèle avec une conductance élémentaire G.
Figure 3.2: Schéma électrique équivalent d'une ligne de transmission
Les blocs élémentaires du schéma équivalent sont par unité de longueur. La conductance G est
négligeable par rapport à l’impédance de la capacité C en parallèle dans le cas du PCB et de la bande
de fréquence étudiée. En fait, l’impédance de la capacité est inversement proportionnelle à la
capacité et à la fréquence d’où la dominance du C sur G. Afin d’avoir un modèle des pistes valable
pour nos études, il suffit de déterminer les valeurs de la résistance, l’inductance et la capacité de la
ligne de transmission. Ces valeurs dépendent du routage de la carte mais aussi de la fréquence.
110
La longueur d’onde λ a été approximée à une dépendance entre la vitesse de la lumière dans l’air c et
la fréquence par la relation suivante (3.2) :
(3.2)
Si la fréquence maximale est de 108 MHz, la longueur d’onde minimale sera de 2,78 m. Une règle de
base est de représenter une piste de longueur qui ne dépasse passe le dixième de la longueur d’onde
minimale par un unique modèle élémentaire. Dans notre cas, le dixième de la longueur d’onde est
équivalent à 27.8 cm et donc toutes nos pistes peuvent être représentées par un unique modèle
élémentaire.
Dans la suite de cette partie, nous allons détailler les méthodes utilisées (PEEC, MoM et formules
analytiques) pour déterminer le modèle de nos pistes.
L’inductance de la piste ne dépend pas seulement de la piste elle-même mais aussi de son
environnement. Cette inductance est divisée en trois parties :
la boucle entre la piste et le plan de masse forment une inductance appelée l’inductance
externe de la piste Lext. Cette inductance ne dépend pas de la fréquence et est équivalente à
l’inductance haute fréquence de la piste ;
les effets de peau et de proximité à l’intérieur de la piste résultent en la création de
l’inductance interne de la piste Lint qui dépend de la fréquence ;
l’inductance interne de la partie du plan de masse qui est parcourue par le courant de retour
Lg et qui dépend aussi de la fréquence.
Ainsi :
(3.3)
Le même raisonnement s’applique à la résistance qui est divisée en deux parties, la résistance de la
piste Rp et celle du plan de masse Rg.
(3.4)
Trois méthodes ont été utilisées pour déterminer les éléments du modèle de la piste. Le choix
d’utiliser plusieurs méthodes a été fait afin d’avoir un modèle flexible et rapide à simuler. Chaque
méthode est censée déterminer d’une façon optimisée une partie du modèle.
1. PEEC (Partial Element Equivalent Circuit) : cette méthode a été utilisée pour déterminer la
variation de la résistance Rp et l’inductance interne Lint de la piste en fonction de la fréquence
2. MoM (Moment Method) : la méthode des moments nous a permis à déterminer l’inductance
externe de la piste Lext, la capacité entre la piste et le plan de masse C mais aussi les
inductances mutuelles entre les pistes et les capacités entre pistes.
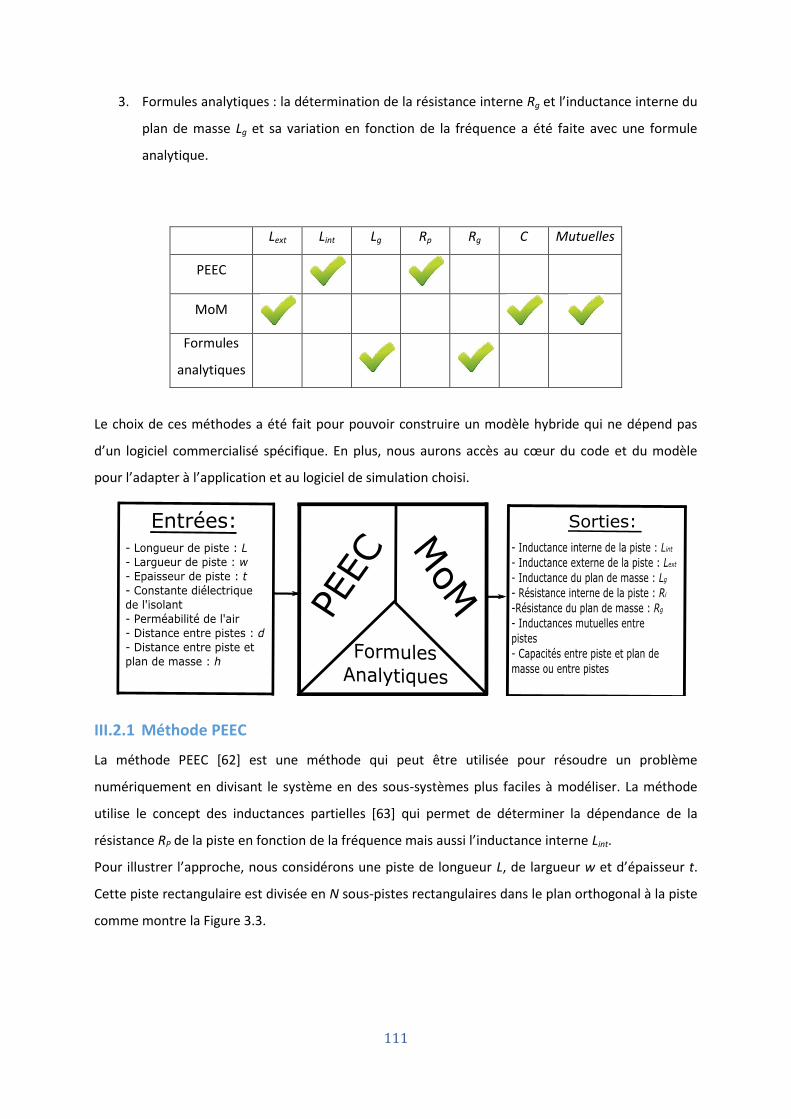
111
3. Formules analytiques : la détermination de la résistance interne Rg et l’inductance interne du
plan de masse Lg et sa variation en fonction de la fréquence a été faite avec une formule
analytique.
Lext Lint Lg Rp Rg C Mutuelles
PEEC
MoM
Formules
analytiques
Le choix de ces méthodes a été fait pour pouvoir construire un modèle hybride qui ne dépend pas
d’un logiciel commercialisé spécifique. En plus, nous aurons accès au cœur du code et du modèle
pour l’adapter à l’application et au logiciel de simulation choisi.
III.2.1 Méthode PEEC
La méthode PEEC [62] est une méthode qui peut être utilisée pour résoudre un problème
numériquement en divisant le système en des sous-systèmes plus faciles à modéliser. La méthode
utilise le concept des inductances partielles [63] qui permet de déterminer la dépendance de la
résistance RP de la piste en fonction de la fréquence mais aussi l’inductance interne Lint.
Pour illustrer l’approche, nous considérons une piste de longueur L, de largueur w et d’épaisseur t.
Cette piste rectangulaire est divisée en N sous-pistes rectangulaires dans le plan orthogonal à la piste
comme montre la Figure 3.3.
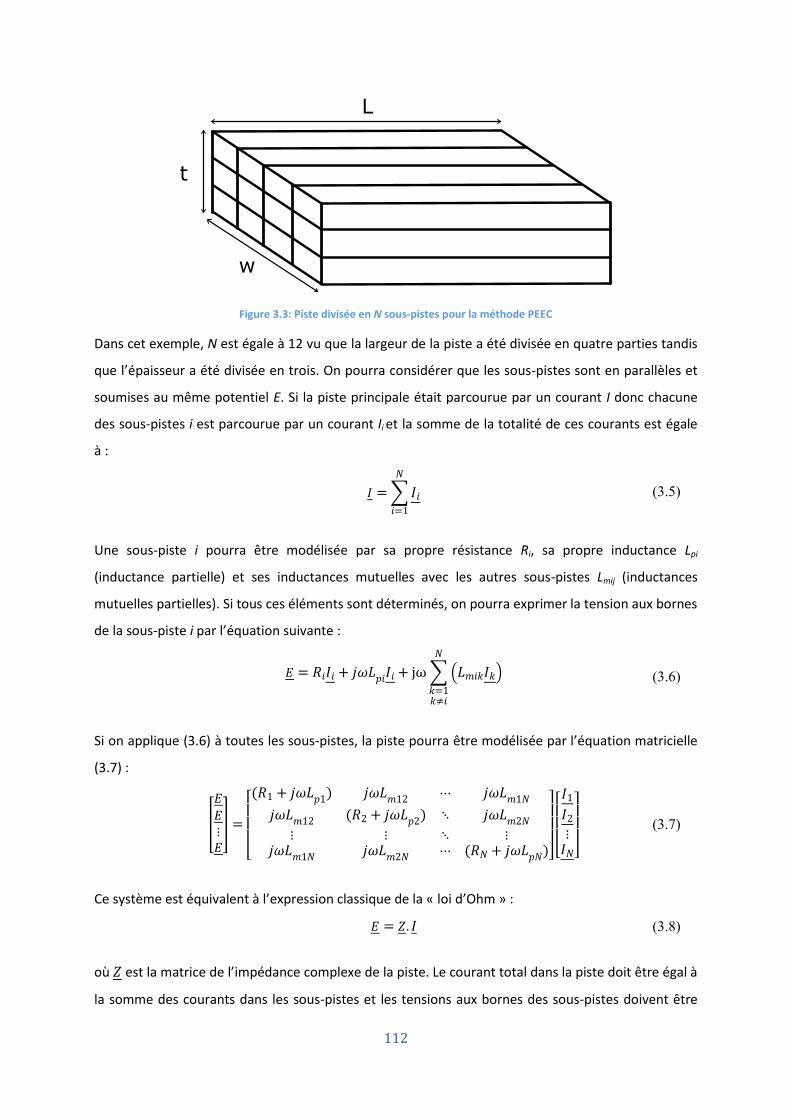
112
Figure 3.3: Piste divisée en N sous-pistes pour la méthode PEEC
Dans cet exemple, N est égale à 12 vu que la largeur de la piste a été divisée en quatre parties tandis
que l’épaisseur a été divisée en trois. On pourra considérer que les sous-pistes sont en parallèles et
soumises au même potentiel E. Si la piste principale était parcourue par un courant I donc chacune
des sous-pistes i est parcourue par un courant Ii et la somme de la totalité de ces courants est égale
à :
(3.5)
Une sous-piste i pourra être modélisée par sa propre résistance Ri, sa propre inductance Lpi
(inductance partielle) et ses inductances mutuelles avec les autres sous-pistes Lmij (inductances
mutuelles partielles). Si tous ces éléments sont déterminés, on pourra exprimer la tension aux bornes
de la sous-piste i par l’équation suivante :
(3.6)
Si on applique (3.6) à toutes les sous-pistes, la piste pourra être modélisée par l’équation matricielle
(3.7) :
(3.7)
Ce système est équivalent à l’expression classique de la « loi d’Ohm » :
(3.8)
où est la matrice de l’impédance complexe de la piste. Le courant total dans la piste doit être égal à
la somme des courants dans les sous-pistes et les tensions aux bornes des sous-pistes doivent être
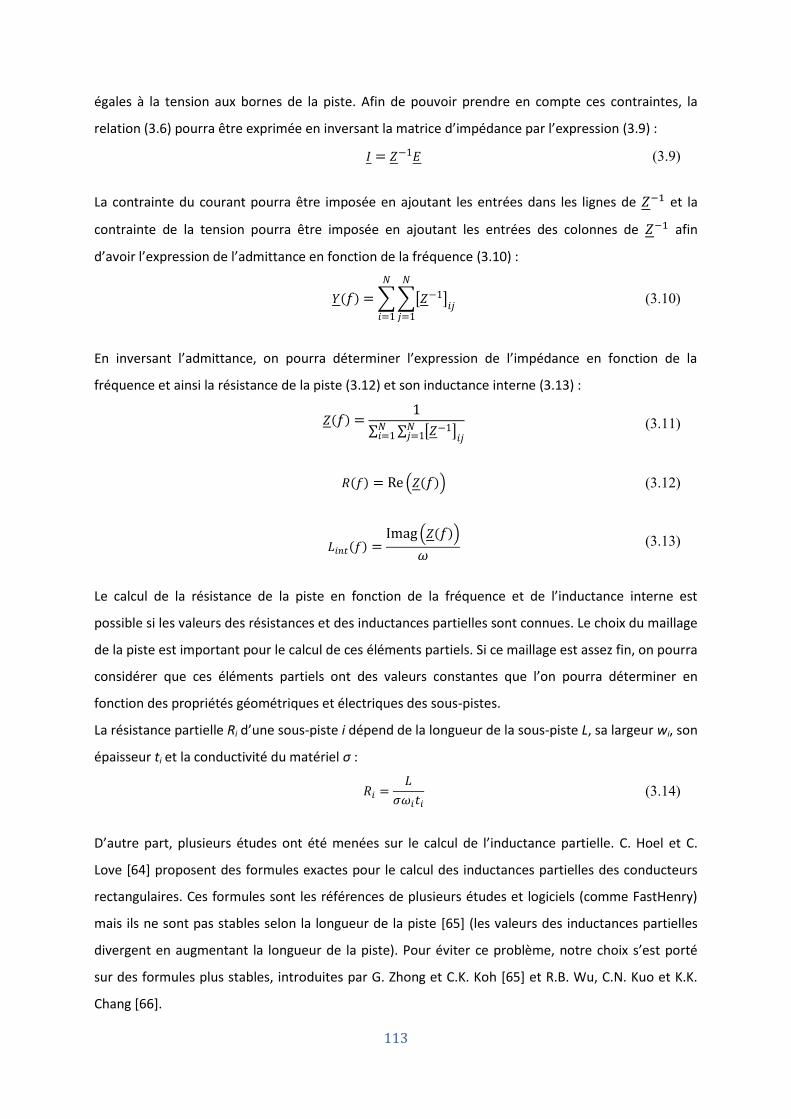
113
égales à la tension aux bornes de la piste. Afin de pouvoir prendre en compte ces contraintes, la
relation (3.6) pourra être exprimée en inversant la matrice d’impédance par l’expression (3.9) :
(3.9)
La contrainte du courant pourra être imposée en ajoutant les entrées dans les lignes de et la
contrainte de la tension pourra être imposée en ajoutant les entrées des colonnes de afin
d’avoir l’expression de l’admittance en fonction de la fréquence (3.10) :
(3.10)
En inversant l’admittance, on pourra déterminer l’expression de l’impédance en fonction de la
fréquence et ainsi la résistance de la piste (3.12) et son inductance interne (3.13) :
(3.11)
(3.12)
(3.13)
Le calcul de la résistance de la piste en fonction de la fréquence et de l’inductance interne est
possible si les valeurs des résistances et des inductances partielles sont connues. Le choix du maillage
de la piste est important pour le calcul de ces éléments partiels. Si ce maillage est assez fin, on pourra
considérer que ces éléments partiels ont des valeurs constantes que l’on pourra déterminer en
fonction des propriétés géométriques et électriques des sous-pistes.
La résistance partielle Ri d’une sous-piste i dépend de la longueur de la sous-piste L, sa largeur wi, son
épaisseur ti et la conductivité du matériel σ :
(3.14)
D’autre part, plusieurs études ont été menées sur le calcul de l’inductance partielle. C. Hoel et C.
Love [64] proposent des formules exactes pour le calcul des inductances partielles des conducteurs
rectangulaires. Ces formules sont les références de plusieurs études et logiciels (comme FastHenry)
mais ils ne sont pas stables selon la longueur de la piste [65] (les valeurs des inductances partielles
divergent en augmentant la longueur de la piste). Pour éviter ce problème, notre choix s’est porté
sur des formules plus stables, introduites par G. Zhong et C.K. Koh [65] et R.B. Wu, C.N. Kuo et K.K.
Chang [66].
114
Considérons deux conducteurs P et Q qui représentent deux sous-pistes de notre système comme
présentés sur la Figure 3.4.
Figure 3.4: Deux conducteurs dans l'espace
Chacun des conducteurs est nommé en fonction de l’indice de ces sommets Pi,j,k et Qi,j,k. Un
conducteur rectangulaire a huit sommets donc trois indices binaires sont nécessaires pour nommer
tous les sommets. Les valeurs de i, j et k varient entre 0 et 1 comme montre la Figure 3.4.
Commençons par le calcul de l’inductance propre partielle du conducteur de longueur L, largueur wi
et épaisseur ti. En effectuant les changements de variables montrés dans (3.15), on pourra calculer
l’inductance propre en question.
(3.15)
En appliquant ces changements de variable, la détermination de l’inductance propre Li devient :

115
(3.16)
La détermination de l’inductance mutuelle est plus compliquée. D’après [64], on pourra calculer
l’inductance mutuelle entre deux conducteurs P et Q comme étant la somme de l’inductance propre
de tous les conducteurs virtuels créés par ces deux conducteurs, au poids et au signe près. Le
conducteur virtuel en question est formé par un sommet Pi0,j0,k0 et un sommet Qi1,j1,k1 comme le
montre la Figure 3.5.
Figure 3.5: Conducteur virtuel créé par deux conducteurs
Deux conducteurs donnent lieu à 64 combinaisons car chacun des conducteurs contient huit
sommets. Si LPi0,j0,k0,Qi1,j1,k1 est l’inductance propre du conducteur virtuel, APi0,j0,k0,Qi1,j1,k1 sa surface, SP la
surface du conducteur P et SQ la surface du conducteur Q alors le calcul de l’inductance mutuelle
entre les conducteurs P et Q sera :
(3.17)
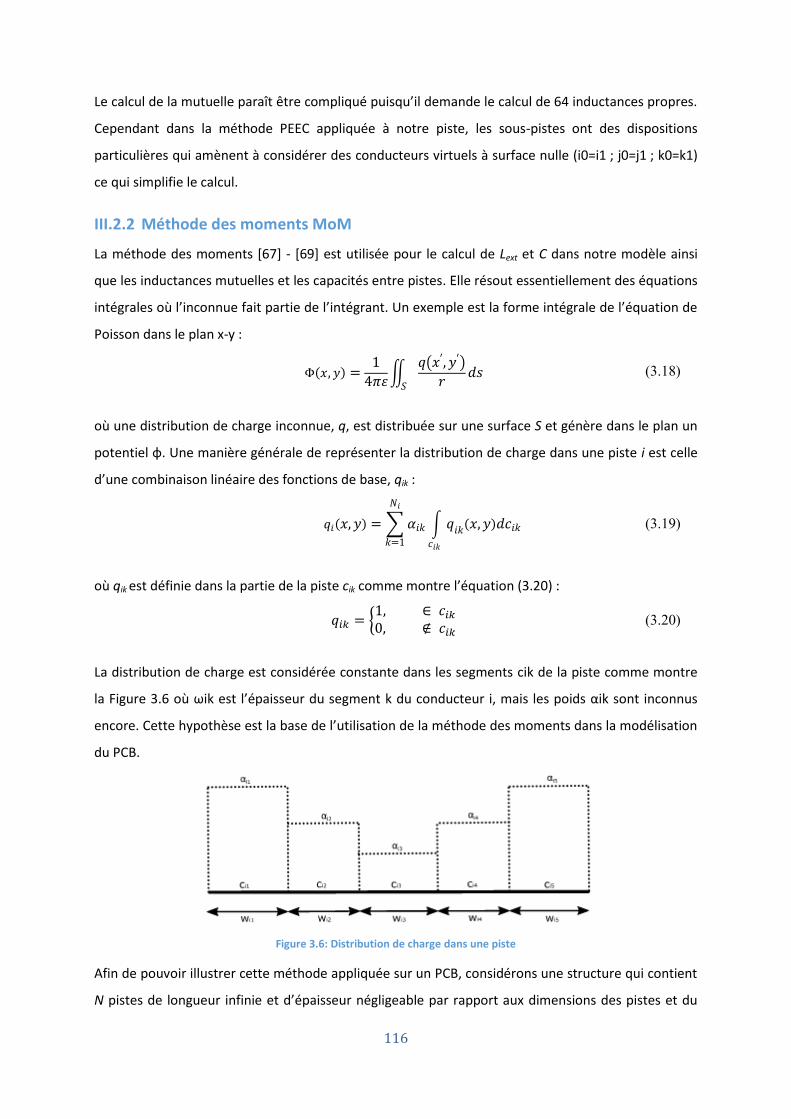
116
Le calcul de la mutuelle paraît être compliqué puisqu’il demande le calcul de 64 inductances propres.
Cependant dans la méthode PEEC appliquée à notre piste, les sous-pistes ont des dispositions
particulières qui amènent à considérer des conducteurs virtuels à surface nulle (i0=i1 ; j0=j1 ; k0=k1)
ce qui simplifie le calcul.
III.2.2 Méthode des moments MoM
La méthode des moments [67] - [69] est utilisée pour le calcul de Lext et C dans notre modèle ainsi
que les inductances mutuelles et les capacités entre pistes. Elle résout essentiellement des équations
intégrales où l’inconnue fait partie de l’intégrant. Un exemple est la forme intégrale de l’équation de
Poisson dans le plan x-y :
(3.18)
où une distribution de charge inconnue, q, est distribuée sur une surface S et génère dans le plan un
potentiel φ. Une manière générale de représenter la distribution de charge dans une piste i est celle
d’une combinaison linéaire des fonctions de base, qik :
(3.19)
où qik est définie dans la partie de la piste cik comme montre l’équation (3.20) :
(3.20)
La distribution de charge est considérée constante dans les segments cik de la piste comme montre
la Figure 3.6 où ωik est l’épaisseur du segment k du conducteur i, mais les poids αik sont inconnus
encore. Cette hypothèse est la base de l’utilisation de la méthode des moments dans la modélisation
du PCB.
Figure 3.6: Distribution de charge dans une piste
Afin de pouvoir illustrer cette méthode appliquée sur un PCB, considérons une structure qui contient
N pistes de longueur infinie et d’épaisseur négligeable par rapport aux dimensions des pistes et du

117
plan de masse. Celui-ci est espacé des pistes par un diélectrique d’épaisseur t et de constante
diélectrique εr. Une piste i est divisée en Ni segments, elle a un potentiel sur un segment j et elle
possède une distribution de charge linéique qij sur le segment j. Afin de déterminer la matrice des
capacités linéiques de la structure, on utilisera la relation entre les distributions de charges, les
capacités et les potentiels présentée dans (3.21) :
(3.21)
La distribution des charges qi de chaque piste peut être déterminée comme montré dans (3.18) et
(3.18). En utilisant ces relations, on pourra en déduire :
(3.22)
Avec ces hypothèses, on pourra dire que le potentiel sur un point de la piste pourra s’exprimer en
fonction de toutes les distributions de charges inconnues dans la structure. Pour cette raison, il
pourra s’écrire comme une combinaison linéaire de ces distributions de charge :
(3.23)
Chacun des coefficients Knk est défini comme étant la contribution du potentiel créé par une fonction
de base (αnk) seule :
(3.24)
En appliquant (3.21) pour toutes les pistes de notre structure, on pourra aboutir au système matriciel
suivant :
(3.25)
Avec :
(3.26)

118
En inversant le système matriciel de (3.25), on obtient :
(3.27)
En utilisant le système des équations introduits dans (3.21), (3.22), (3.25) et (3.26), on pourra en
déduire le calcul du système des capacités de la structure.
(3.28)
Dans l’équation (3.27), on considère que la largeur de tous les segments de pistes de notre structure
est la même et est égale à ω.
Dès lors, le sous-problème à résoudre est la détermination du potentiel d’un segment d’une piste dû
à une distribution de charge constante. En considérant arbitrairement que cette distribution de
charge est égale à 1 C/m2, le calcul devient plus facile.
Afin de déterminer le potentiel dans l’espace dû à une distribution de charge q, on utilise la théorie
des images illustrée sur la Figure 3.7. On considère que la distribution de charge q est à une hauteur
h de la surface du diélectrique et que le facteur de réflexion k est égale à :
(3.29)
Figure 3.7: Image d'une charge ponctuelle au-dessus d’un diélectrique
Dans la Figure 3.7, une charge q émet un champ électrique ψ qui va traverser un milieu non-
homogène, qui se caractérise donc par deux constantes diélectriques différentes. Cette non-
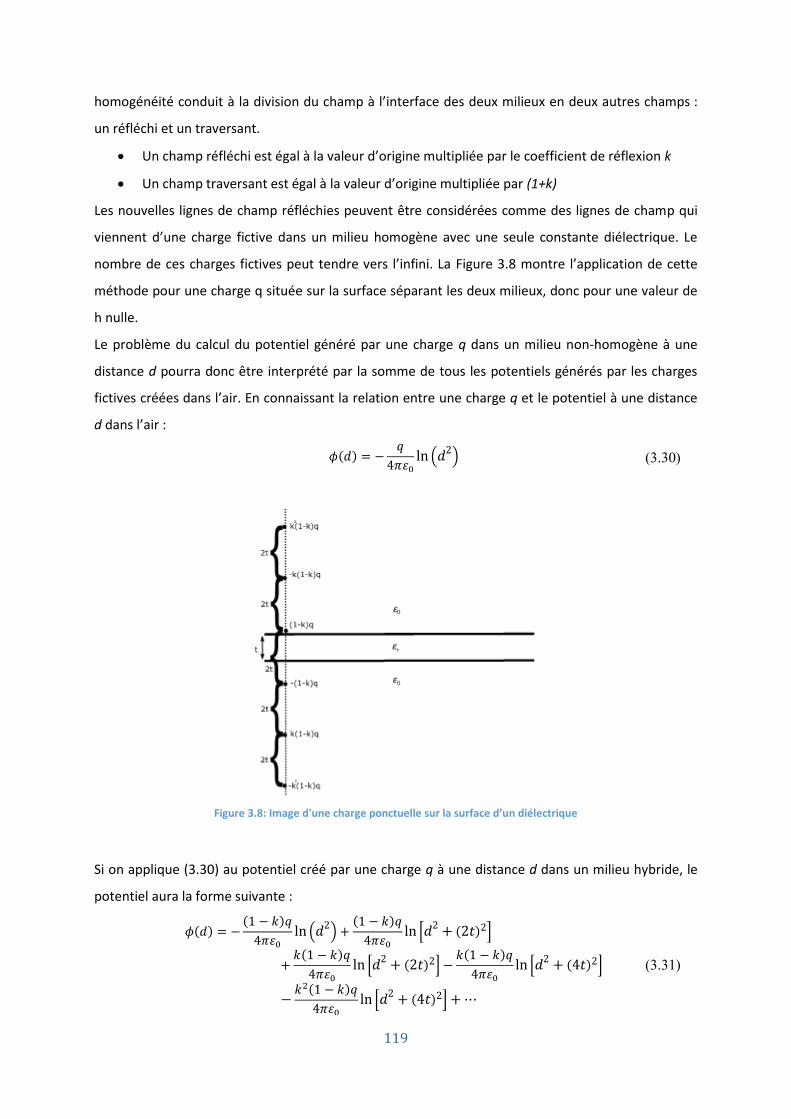
119
homogénéité conduit à la division du champ à l’interface des deux milieux en deux autres champs :
un réfléchi et un traversant.
Un champ réfléchi est égal à la valeur d’origine multipliée par le coefficient de réflexion k
Un champ traversant est égal à la valeur d’origine multipliée par (1+k)
Les nouvelles lignes de champ réfléchies peuvent être considérées comme des lignes de champ qui
viennent d’une charge fictive dans un milieu homogène avec une seule constante diélectrique. Le
nombre de ces charges fictives peut tendre vers l’infini. La Figure 3.8 montre l’application de cette
méthode pour une charge q située sur la surface séparant les deux milieux, donc pour une valeur de
h nulle.
Le problème du calcul du potentiel généré par une charge q dans un milieu non-homogène à une
distance d pourra donc être interprété par la somme de tous les potentiels générés par les charges
fictives créées dans l’air. En connaissant la relation entre une charge q et le potentiel à une distance
d dans l’air :
(3.30)
Figure 3.8: Image d'une charge ponctuelle sur la surface d’un diélectrique
Si on applique (3.30) au potentiel créé par une charge q à une distance d dans un milieu hybride, le
potentiel aura la forme suivante :
(3.31)

120
(3.32)
Où :
(3.33)
Considérons un segment de piste ayant une largeur ωi, on pourra effectuer les changements de
variables dans (3.34) :
(3.34)
Avec les changements de variable de (3.34), on pourra calculer les potentiels propres créés par une
charge placée sur un segment de piste mais aussi ceux créés à une distance d :
(3.35)
(3.36)
En utilisant (3.28), on pourra déduire le système matriciel des capacités de notre structure. Ces
capacités sont constantes car nous faisons l’hypothèse que notre constante diélectrique ne varie pas
beaucoup dans la plage de fréquence étudiée. La Figure 3.9 montre la variation de plusieurs
diélectriques en fonction de la fréquence et le FR-4 était celui utilisé dans nos travaux.
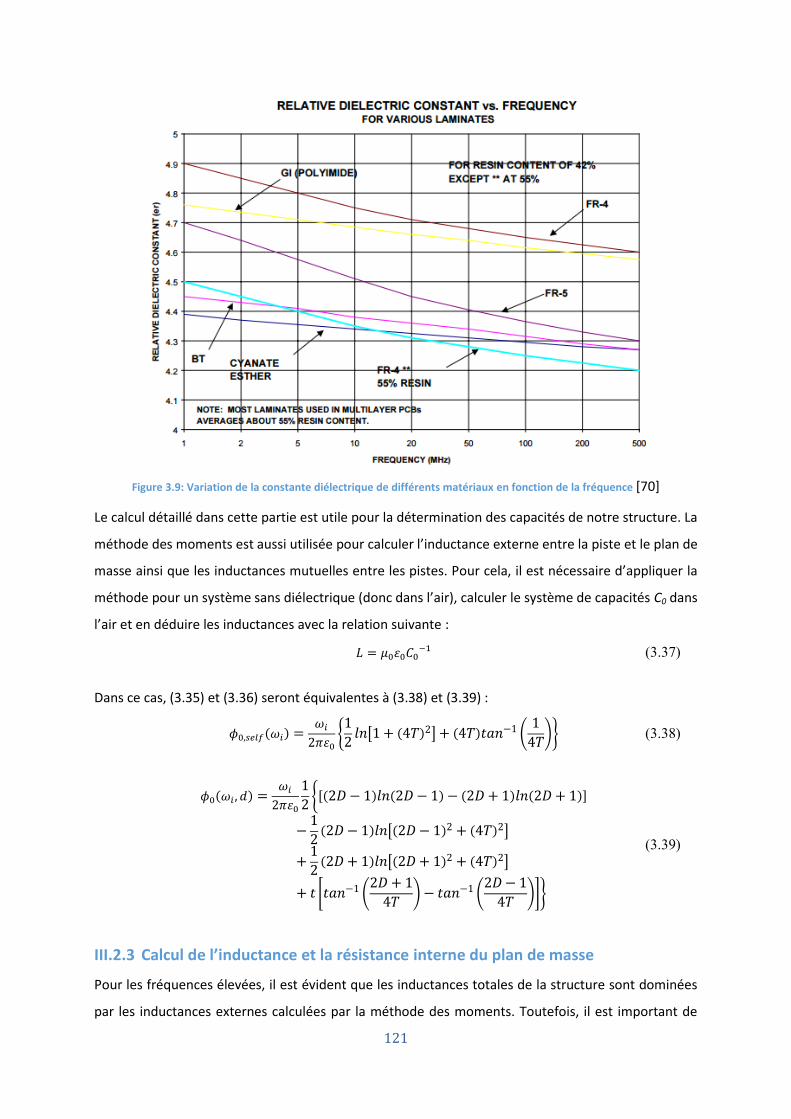
121
Figure 3.9: Variation de la constante diélectrique de différents matériaux en fonction de la fréquence [70]
Le calcul détaillé dans cette partie est utile pour la détermination des capacités de notre structure. La
méthode des moments est aussi utilisée pour calculer l’inductance externe entre la piste et le plan de
masse ainsi que les inductances mutuelles entre les pistes. Pour cela, il est nécessaire d’appliquer la
méthode pour un système sans diélectrique (donc dans l’air), calculer le système de capacités C0 dans
l’air et en déduire les inductances avec la relation suivante :
(3.37)
Dans ce cas, (3.35) et (3.36) seront équivalentes à (3.38) et (3.39) :
(3.38)
(3.39)
III.2.3 Calcul de l’inductance et la résistance interne du plan de masse
Pour les fréquences élevées, il est évident que les inductances totales de la structure sont dominées
par les inductances externes calculées par la méthode des moments. Toutefois, il est important de

122
connaître la contribution des autres inductances à la totalité des inductances de la structure sur
toute la plage de fréquence : pour cette raison, le calcul de l’inductance interne du plan de masse est
nécessaire.
En utilisant les équations de Maxwell et les lois classiques de l’électromagnétisme, C. Holloway [72] a
réussi à développer une formule explicite pour déterminer la valeur de l’inductance interne du plan
de masse en fonction de fréquence. Considérons une piste de longueur l, de largeur ωp, d’épaisseur t
et située à une distance h du plan de masse. L’expression (3.40) détaille la relation entre l’inductance
interne désirée Lg et les caractéristiques physiques et géométriques de la structure.
(3.40)
où Rs est l’impédance surfacique de Leontovich [72] définie dans (3.41) :
(3.41)
avec la conductivité du plan de masse, δ l’épaisseur de peau et f la fréquence. Le calcul dans (3.38)
est valable pour un plan de masse ayant une épaisseur importante par rapport aux dimensions de la
structure. Si l’épaisseur du plan de masse n’est pas trop grande par rapport à l’épaisseur de peau, il
faut remplacer l’impédance surfacique de Leontovich RS dans (3.38) par la Rt qui est une correction
de cette impédance et qui prend en considération l’épaisseur du plan de masse t. L’expression de Rt
est donnée par (3.42).
(3.42)
Le calcul de la résistance interne du plan de masse est réalisé aussi par une formule analytique
explicite qui nous fournit la variation de cette résistance en fonction de la fréquence. R. Faraji-Dana
et Y. Leonard Chow [73] ont développé une formule qui montre la relation entre la résistance interne
du plan de masse Rg et la résistance basse fréquence de la piste RDC montré dans.
(3.43)
Afin de pouvoir utiliser ce modèle dans LTSpiceIV, il faudra avoir un modèle compatible qui
représente la variation de la résistance et de l’inductance en fonction de la fréquence. La Figure 3.10
présente celui pris en compte et les éléments de ce modèle sont déterminés par optimisation au
moyen d’un algorithme d’évolution différentielle. RDC représente la résistance basse fréquence, RPF la
résistance des pertes fer et LHF l’inductance en haute fréquence.
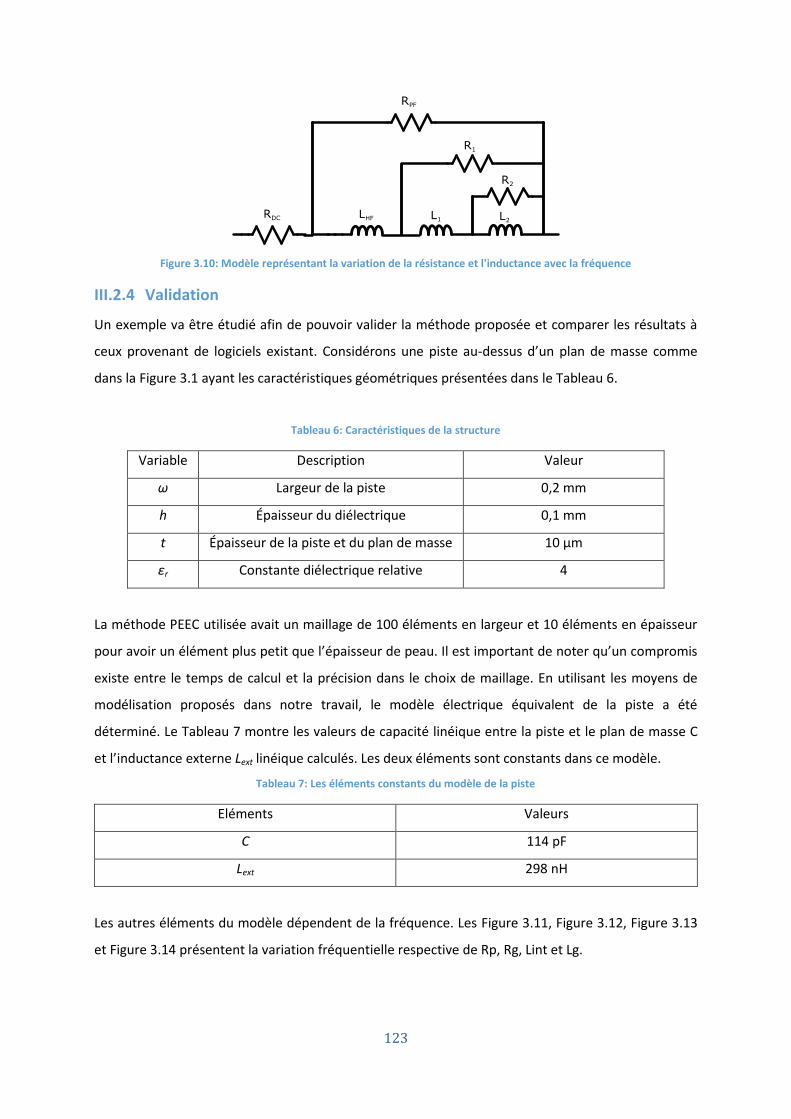
123
Figure 3.10: Modèle représentant la variation de la résistance et l'inductance avec la fréquence
III.2.4 Validation
Un exemple va être étudié afin de pouvoir valider la méthode proposée et comparer les résultats à
ceux provenant de logiciels existant. Considérons une piste au-dessus d’un plan de masse comme
dans la Figure 3.1 ayant les caractéristiques géométriques présentées dans le Tableau 6.
Tableau 6: Caractéristiques de la structure
Variable Description Valeur
ω Largeur de la piste 0,2 mm
h Épaisseur du diélectrique 0,1 mm
t Épaisseur de la piste et du plan de masse 10 µm
εr Constante diélectrique relative 4
La méthode PEEC utilisée avait un maillage de 100 éléments en largeur et 10 éléments en épaisseur
pour avoir un élément plus petit que l’épaisseur de peau. Il est important de noter qu’un compromis
existe entre le temps de calcul et la précision dans le choix de maillage. En utilisant les moyens de
modélisation proposés dans notre travail, le modèle électrique équivalent de la piste a été
déterminé. Le Tableau 7 montre les valeurs de capacité linéique entre la piste et le plan de masse C
et l’inductance externe Lext linéique calculés. Les deux éléments sont constants dans ce modèle.
Tableau 7: Les éléments constants du modèle de la piste
Eléments Valeurs
C 114 pF
Lext 298 nH
Les autres éléments du modèle dépendent de la fréquence. Les Figure 3.11, Figure 3.12, Figure 3.13
et Figure 3.14 présentent la variation fréquentielle respective de Rp, Rg, Lint et Lg.
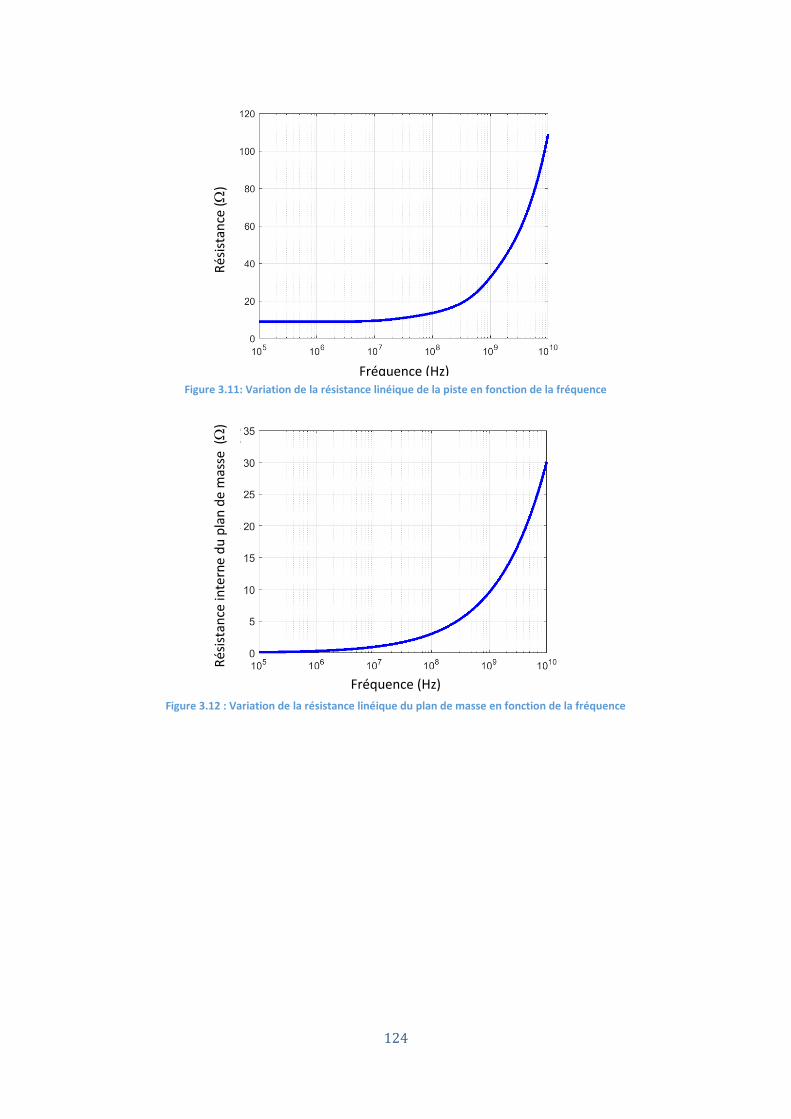
124
Figure 3.11: Variation de la résistance linéique de la piste en fonction de la fréquence
Figure 3.12 : Variation de la résistance linéique du plan de masse en fonction de la fréquence
Rés
ista
nce
(
)
Fréquence (Hz)
Rés
ista
nce
inte
rne
du
pla
n d
e m
asse
(
)
Fréquence (Hz)
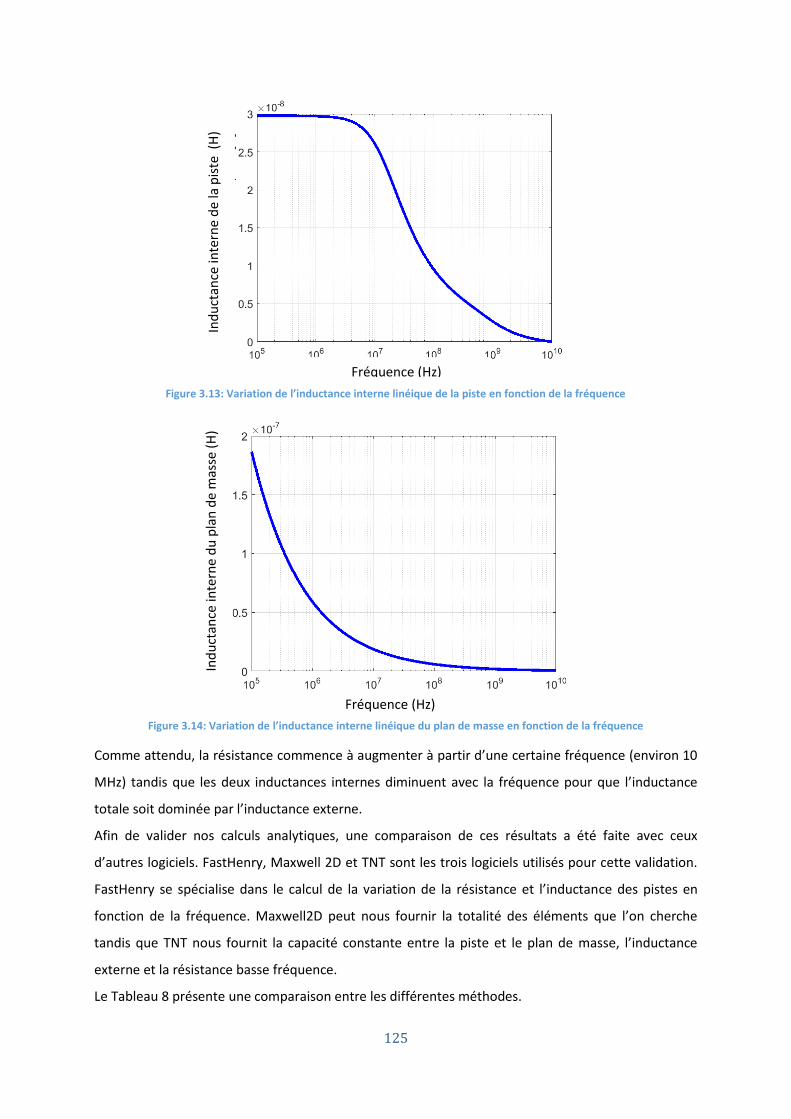
125
Figure 3.13: Variation de l’inductance interne linéique de la piste en fonction de la fréquence
Figure 3.14: Variation de l’inductance interne linéique du plan de masse en fonction de la fréquence
Comme attendu, la résistance commence à augmenter à partir d’une certaine fréquence (environ 10
MHz) tandis que les deux inductances internes diminuent avec la fréquence pour que l’inductance
totale soit dominée par l’inductance externe.
Afin de valider nos calculs analytiques, une comparaison de ces résultats a été faite avec ceux
d’autres logiciels. FastHenry, Maxwell 2D et TNT sont les trois logiciels utilisés pour cette validation.
FastHenry se spécialise dans le calcul de la variation de la résistance et l’inductance des pistes en
fonction de la fréquence. Maxwell2D peut nous fournir la totalité des éléments que l’on cherche
tandis que TNT nous fournit la capacité constante entre la piste et le plan de masse, l’inductance
externe et la résistance basse fréquence.
Le Tableau 8 présente une comparaison entre les différentes méthodes.
Ind
uct
ance
inte
rne
de
la p
iste
(H
)
Fréquence (Hz)
Fréquence (Hz)
Ind
uct
ance
inte
rne
du
pla
n d
e m
asse
(H
)
126
Tableau 8: Comparaison des paramètres du modèle
FastHenry Maxwell 2D
Fréquence [Hz] R [Ω/m] L [nH/m] R [Ω/m] L [nH/m] C [pF/m]
100k 9,8256 437,066667 9,8257 439,05
117,43
1M 10,1323667 409,123333 10,137 410,52
10M 11,6177667 320,982667 11,631 321,58
100M 16,029 302,444 16,072 303,08
1G 43,351 292,528333 43,245 293,13
TNT Méthode Hybride
Fréquence [Hz] R [Ω/m] L [nH/m] C [pF/m] R [Ω/m] L [nH/m] C [pF/m]
100k
8,92857 285,091 116,916
9,029 420,2
114.39
1M 9,2055 386,5
10M 10,3929 342,5
100M 16,735 313,2
1G 43,204 302,5
On constate que les résultats des deux logiciels FastHenry et Maxwell 2D sont très proches et l’erreur
ne dépasse pas 0,5%. D’autre part, les résultats de la méthode hybride proposée dans ce chapitre
sont proches de ceux fournis par les logiciels FastHenry et Maxwell 2D. L’erreur ne dépasse pas 6%
pour l’inductance totale et 2,5% pour la capacité. Pour la résistance, on remarque que l’erreur est
importante pour les basses fréquences (8.1%) mais devient très faible pour les hautes fréquences
(0.094%).
Une autre validation a été faite en comparant les perturbations conduites émises par le Buck dans 3
cas différents :
Simulation circuit sans prendre en compte le PCB ;
Simulation circuit en prenant en compte le PCB ;
Mesure
Les simulations circuit utilisent tous les modèles des composants passifs développés dans cette thèse
ainsi que le modèle du MOSFET basé sur la mesure.
La Figure 3.15 montre une comparaison des amplitudes de ces perturbations en fonction de la
fréquence. Cette figure montre qu’en prenant compte le PCB dans la simulation, un changement
dans les perturbations devient visible à partir de 10 MHz. Avant cette fréquence, l’effet du PCB est
négligeable. D’autre part, la simulation en prenant compte du PCB se rapproche plus de la mesure et
présente une résonance vers 48 MHz tandis que la mesure présente une résonance vers 52 MHz.
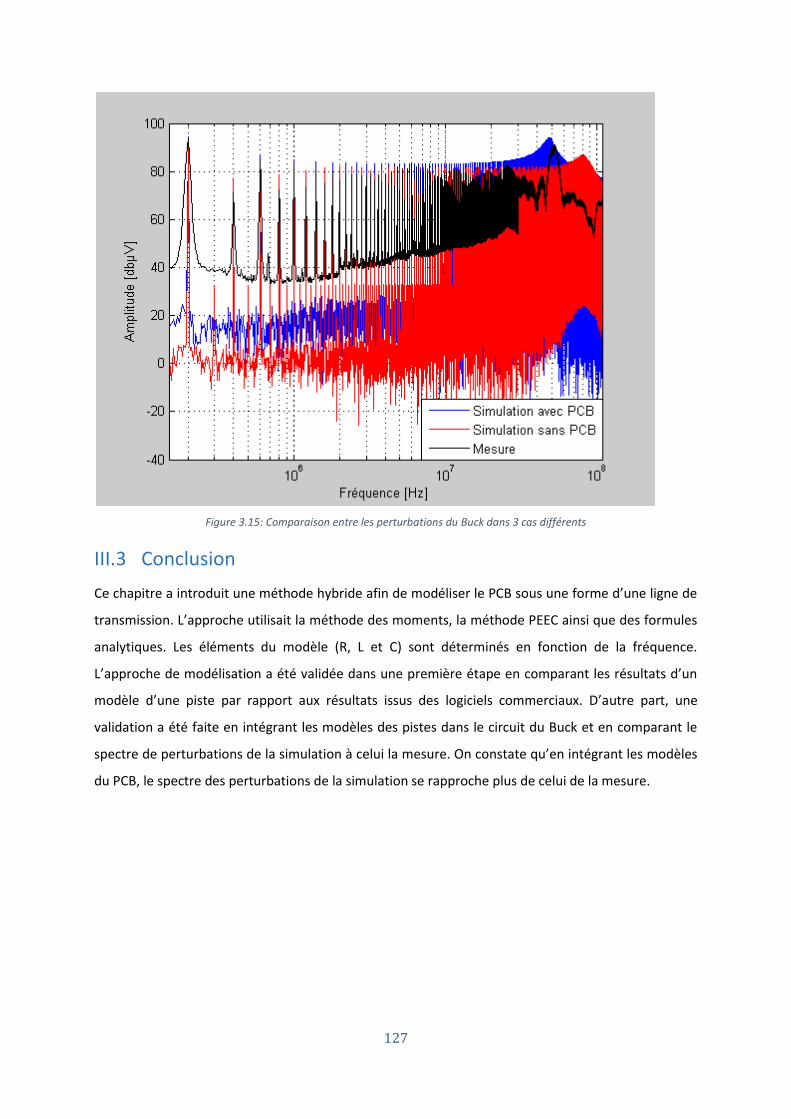
127
Figure 3.15: Comparaison entre les perturbations du Buck dans 3 cas différents
III.3 Conclusion
Ce chapitre a introduit une méthode hybride afin de modéliser le PCB sous une forme d’une ligne de
transmission. L’approche utilisait la méthode des moments, la méthode PEEC ainsi que des formules
analytiques. Les éléments du modèle (R, L et C) sont déterminés en fonction de la fréquence.
L’approche de modélisation a été validée dans une première étape en comparant les résultats d’un
modèle d’une piste par rapport aux résultats issus des logiciels commerciaux. D’autre part, une
validation a été faite en intégrant les modèles des pistes dans le circuit du Buck et en comparant le
spectre de perturbations de la simulation à celui la mesure. On constate qu’en intégrant les modèles
du PCB, le spectre des perturbations de la simulation se rapproche plus de celui de la mesure.

128
129
130
Chapitre IV
Optimisation du routage et de
l’emplacement des
composants

131
132
IV.1 Introduction
La norme CISPR25 impose des niveaux de bruit du spectre de perturbations à ne pas dépasser. Ces
niveaux de bruit sont différents selon la classe. Nous nous placerons dans le cas de la classe 1 mais la
démarche s’applique pour toutes les classes.
Dans le cadre de notre étude, nous nous intéressons aux perturbations émises par notre
convertisseur vers l’alimentation. En pratique, le dimensionnement du convertisseur ne permet que
rarement un respect immédiat de la norme et un filtre d’entrée est alors nécessaire. Il est placé entre
la carte de puissance et sa source, afin de diminuer le niveau des perturbations émises par le
système dans la plage de fréquence couverte par la norme.
Le filtre en question peut générer des problèmes de volume et de coût et pour cette raison, il faut
anticiper son intégration dans le système au plus tôt. Des améliorations qui peuvent diminuer le
niveau de spectre ou bien déplacer les niveaux élevés vers des fréquences non couvertes par la
norme sont envisagées.
Afin d’effectuer ces améliorations, les travaux réalisés se basent sur l’optimisation du routage et de
l’emplacement des composants. Dans les optimisations que nous présenterons, l’objectif sera de
minimiser les perturbations électromagnétiques émises par le convertisseur vers l’alimentation, sous
contrainte géométriques.
Nous allons étudier dans une première approche l’optimisation du routage entre les composants
tout en maintenant la position de ces composants fixée. Deux cas seront étudiés : le premier
considère que les liaisons entre les composants sont composées de deux pistes différentes et le
second considère que ces liaisons sont constituées de plusieurs pistes.
Une seconde approche est ensuite composée où les emplacements des composants seront des
paramètres d’optimisation. Dans ce cas les liaisons entre les composants ne seront que des pistes
simples (une seule piste entre deux bornes).
IV.2 Choix de l’algorithme évolutionnaire
Une optimisation peut être définie par l’adaptation des « paramètres » afin de minimiser un
« objectif » éventuellement par le respect de « contraintes ». On dispose généralement d’un ou
plusieurs modèles qui, en fonction des différents paramètres, nous donne l’objectif et la contrainte.
Nous distinguons deux catégories dans les algorithmes d’optimisations, les algorithmes stochastiques
pour la recherche des solutions globales et les algorithmes déterministes pour la recherche des
solutions locales. Les algorithmes évolutionnaires font partie des algorithmes stochastiques et sont
divisés en deux catégories :
133
les algorithmes à paramètres discrets comme l’algorithme génétique où les paramètres sont
des « 0 » ou « 1 » ;
Les algorithmes à paramètres continus ou mixtes comme les algorithmes à évolution
différentielles.
Les algorithmes évolutionnaires correspondent à une stratégie particulière pour faire évoluer les
paramètres vers la solution optimale. Par analogie avec la théorie de Darwin sur l’évolution et la
notion d’adaptation à l’environnement, chaque paramètre est assimilé à un gène, chaque jeu de
paramètre représente un individu, et le groupe d’individus à un instant donné constitue une
génération. Les algorithmes font ressortir l’optimum en faisant évoluer les générations.
Le classement des individus se fait selon le respect de la contrainte et selon l’objectif atteint par
chacun d’entre eux :
ceux ne respectant pas les contraintes ou qui présentent les objectifs les moins bons ne sont
pas reconduits dans les générations suivantes ;
les meilleures de ceux restants sont reconduits dans la génération suivante ;
la génération suivante est complétée par différents procédés permettant de recouvrir
l’espace de recherche, en particulier le croisement et la mutation :
o le croisement consiste à mélanger les paramètres de deux individus reconduits de la
génération précédente ;
o la mutation consiste à modifier aléatoirement la valeur d’un paramètre d’un
individu ;
Les générations se succèdent et font ressortir le paramètre optimal. L’algorithme s’arrête lorsque la
valeur de l’objectif n’est plus améliorée significativement au fil des générations ou lorsque la
convergence est très lente et que l’utilisateur limite le nombre de génération maximal à évaluer.
Nous avons choisi d’utiliser l’algorithme d’évolution différentielle pour notre cas [75].
IV.3 Optimisation du routage
Dans ce cas d’optimisation, nous fixons l’emplacement des composants et nous essayons d’améliorer
les performances du convertisseur en jouant sur le routage. Ainsi, les paramètres de l’optimisation
sont les coordonnées des pistes du routage tandis que l’objectif à minimiser est relié aux spectres de
perturbations.
Considérons un routage de référence entre les composants du système. Le circuit en question génère
des perturbations électromagnétiques qu’on pourra récupérer au niveau du RSIL. Le spectre de ces
perturbations sera considéré comme le spectre par défaut SPdef qu’on utilisera dans le calcul de la
fonction objectif. En fait, la fonction objectif, donnée par (4.1), sera l’erreur relative pondérée entre
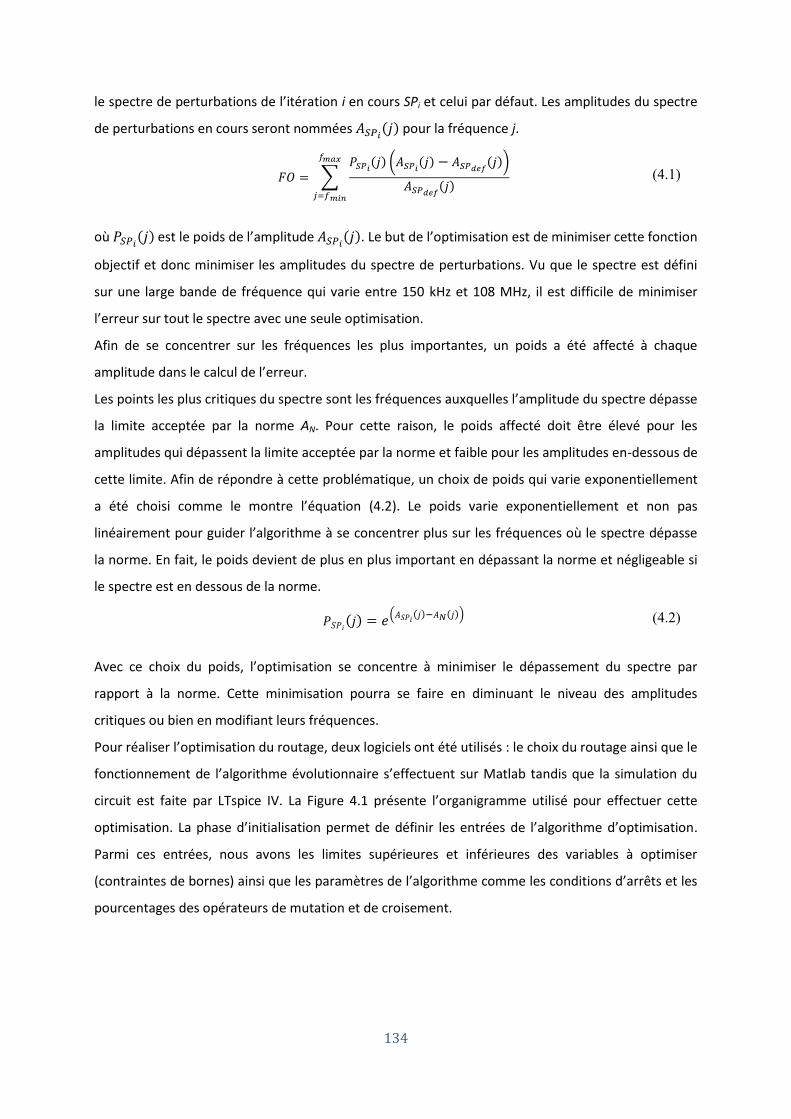
134
le spectre de perturbations de l’itération i en cours SPi et celui par défaut. Les amplitudes du spectre
de perturbations en cours seront nommées pour la fréquence j.
(4.1)
où est le poids de l’amplitude
. Le but de l’optimisation est de minimiser cette fonction
objectif et donc minimiser les amplitudes du spectre de perturbations. Vu que le spectre est défini
sur une large bande de fréquence qui varie entre 150 kHz et 108 MHz, il est difficile de minimiser
l’erreur sur tout le spectre avec une seule optimisation.
Afin de se concentrer sur les fréquences les plus importantes, un poids a été affecté à chaque
amplitude dans le calcul de l’erreur.
Les points les plus critiques du spectre sont les fréquences auxquelles l’amplitude du spectre dépasse
la limite acceptée par la norme AN. Pour cette raison, le poids affecté doit être élevé pour les
amplitudes qui dépassent la limite acceptée par la norme et faible pour les amplitudes en-dessous de
cette limite. Afin de répondre à cette problématique, un choix de poids qui varie exponentiellement
a été choisi comme le montre l’équation (4.2). Le poids varie exponentiellement et non pas
linéairement pour guider l’algorithme à se concentrer plus sur les fréquences où le spectre dépasse
la norme. En fait, le poids devient de plus en plus important en dépassant la norme et négligeable si
le spectre est en dessous de la norme.
(4.2)
Avec ce choix du poids, l’optimisation se concentre à minimiser le dépassement du spectre par
rapport à la norme. Cette minimisation pourra se faire en diminuant le niveau des amplitudes
critiques ou bien en modifiant leurs fréquences.
Pour réaliser l’optimisation du routage, deux logiciels ont été utilisés : le choix du routage ainsi que le
fonctionnement de l’algorithme évolutionnaire s’effectuent sur Matlab tandis que la simulation du
circuit est faite par LTspice IV. La Figure 4.1 présente l’organigramme utilisé pour effectuer cette
optimisation. La phase d’initialisation permet de définir les entrées de l’algorithme d’optimisation.
Parmi ces entrées, nous avons les limites supérieures et inférieures des variables à optimiser
(contraintes de bornes) ainsi que les paramètres de l’algorithme comme les conditions d’arrêts et les
pourcentages des opérateurs de mutation et de croisement.
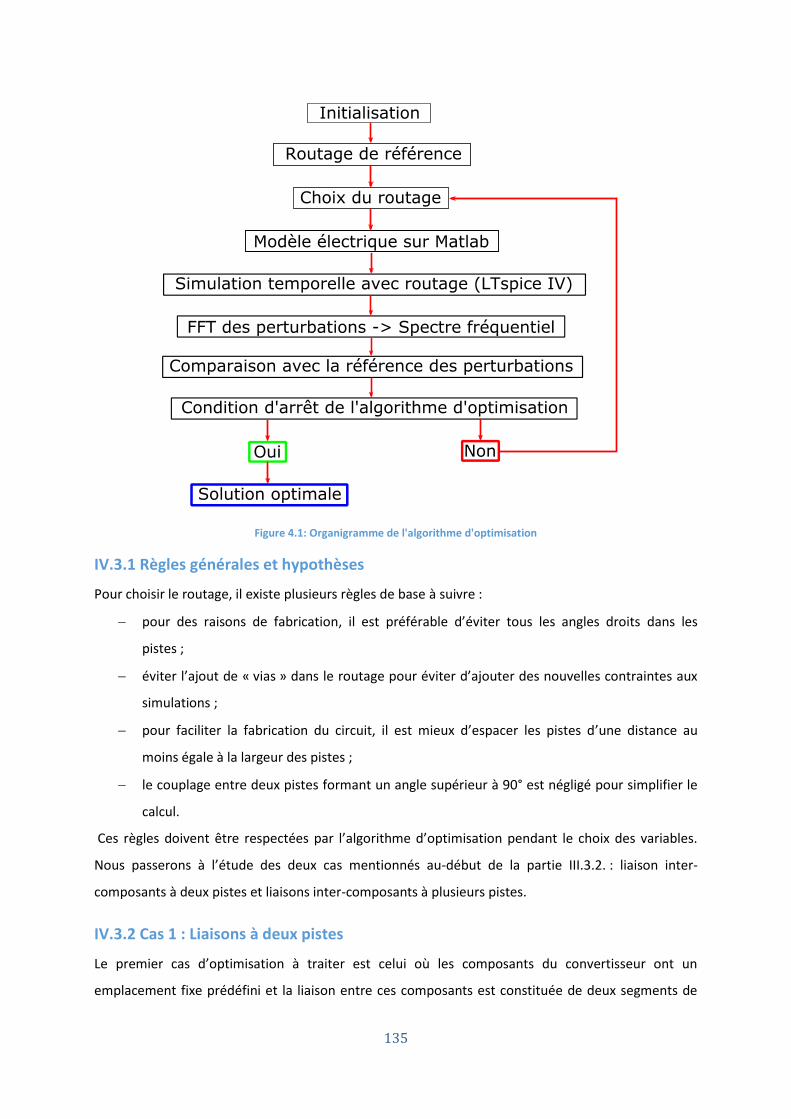
135
Figure 4.1: Organigramme de l'algorithme d'optimisation
IV.3.1 Règles générales et hypothèses
Pour choisir le routage, il existe plusieurs règles de base à suivre :
pour des raisons de fabrication, il est préférable d’éviter tous les angles droits dans les
pistes ;
éviter l’ajout de « vias » dans le routage pour éviter d’ajouter des nouvelles contraintes aux
simulations ;
pour faciliter la fabrication du circuit, il est mieux d’espacer les pistes d’une distance au
moins égale à la largeur des pistes ;
le couplage entre deux pistes formant un angle supérieur à 90° est négligé pour simplifier le
calcul.
Ces règles doivent être respectées par l’algorithme d’optimisation pendant le choix des variables.
Nous passerons à l’étude des deux cas mentionnés au-début de la partie III.3.2. : liaison inter-
composants à deux pistes et liaisons inter-composants à plusieurs pistes.
IV.3.2 Cas 1 : Liaisons à deux pistes
Le premier cas d’optimisation à traiter est celui où les composants du convertisseur ont un
emplacement fixe prédéfini et la liaison entre ces composants est constituée de deux segments de
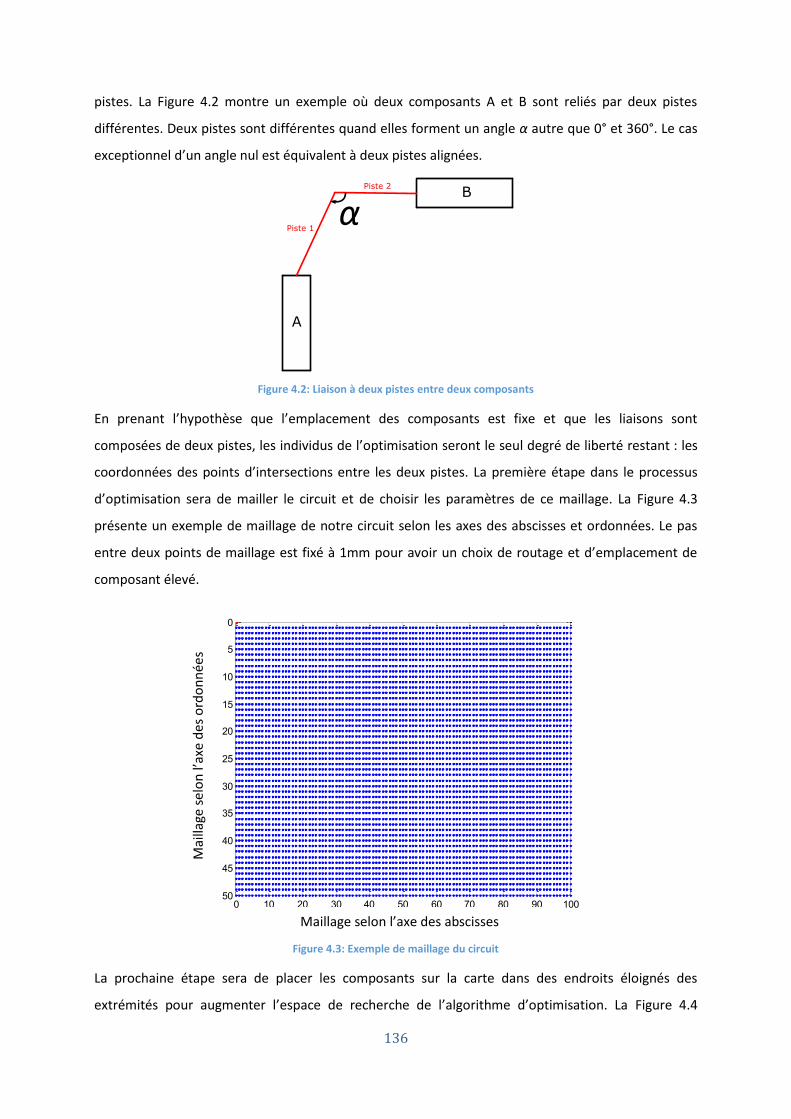
136
pistes. La Figure 4.2 montre un exemple où deux composants A et B sont reliés par deux pistes
différentes. Deux pistes sont différentes quand elles forment un angle α autre que 0° et 360°. Le cas
exceptionnel d’un angle nul est équivalent à deux pistes alignées.
Figure 4.2: Liaison à deux pistes entre deux composants
En prenant l’hypothèse que l’emplacement des composants est fixe et que les liaisons sont
composées de deux pistes, les individus de l’optimisation seront le seul degré de liberté restant : les
coordonnées des points d’intersections entre les deux pistes. La première étape dans le processus
d’optimisation sera de mailler le circuit et de choisir les paramètres de ce maillage. La Figure 4.3
présente un exemple de maillage de notre circuit selon les axes des abscisses et ordonnées. Le pas
entre deux points de maillage est fixé à 1mm pour avoir un choix de routage et d’emplacement de
composant élevé.
Figure 4.3: Exemple de maillage du circuit
La prochaine étape sera de placer les composants sur la carte dans des endroits éloignés des
extrémités pour augmenter l’espace de recherche de l’algorithme d’optimisation. La Figure 4.4
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
45
50
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
sM
ailla
ge s
elo
n l’
axe
des
ord
on
née
s
Maillage selon l’axe des abscisses
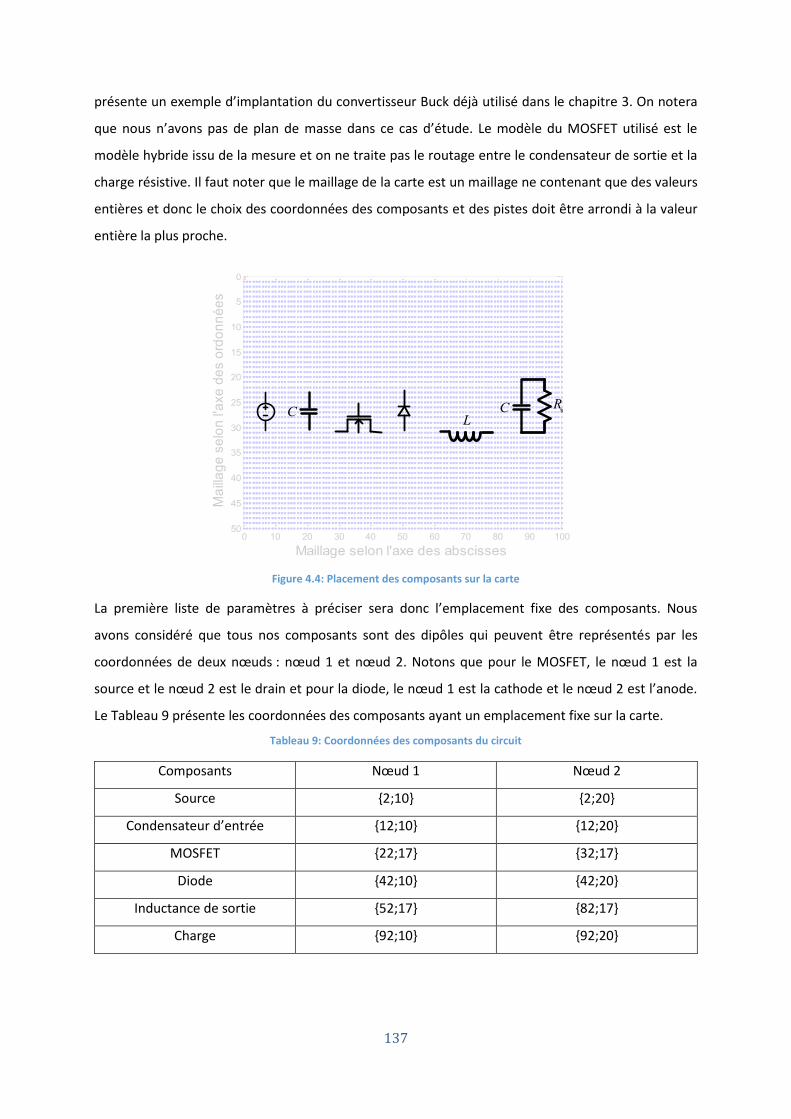
137
présente un exemple d’implantation du convertisseur Buck déjà utilisé dans le chapitre 3. On notera
que nous n’avons pas de plan de masse dans ce cas d’étude. Le modèle du MOSFET utilisé est le
modèle hybride issu de la mesure et on ne traite pas le routage entre le condensateur de sortie et la
charge résistive. Il faut noter que le maillage de la carte est un maillage ne contenant que des valeurs
entières et donc le choix des coordonnées des composants et des pistes doit être arrondi à la valeur
entière la plus proche.
Figure 4.4: Placement des composants sur la carte
La première liste de paramètres à préciser sera donc l’emplacement fixe des composants. Nous
avons considéré que tous nos composants sont des dipôles qui peuvent être représentés par les
coordonnées de deux nœuds : nœud 1 et nœud 2. Notons que pour le MOSFET, le nœud 1 est la
source et le nœud 2 est le drain et pour la diode, le nœud 1 est la cathode et le nœud 2 est l’anode.
Le Tableau 9 présente les coordonnées des composants ayant un emplacement fixe sur la carte.
Tableau 9: Coordonnées des composants du circuit
Composants Nœud 1 Nœud 2
Source 2;10 2;20
Condensateur d’entrée 12;10 12;20
MOSFET 22;17 32;17
Diode 42;10 42;20
Inductance de sortie 52;17 82;17
Charge 92;10 92;20
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
45
50
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
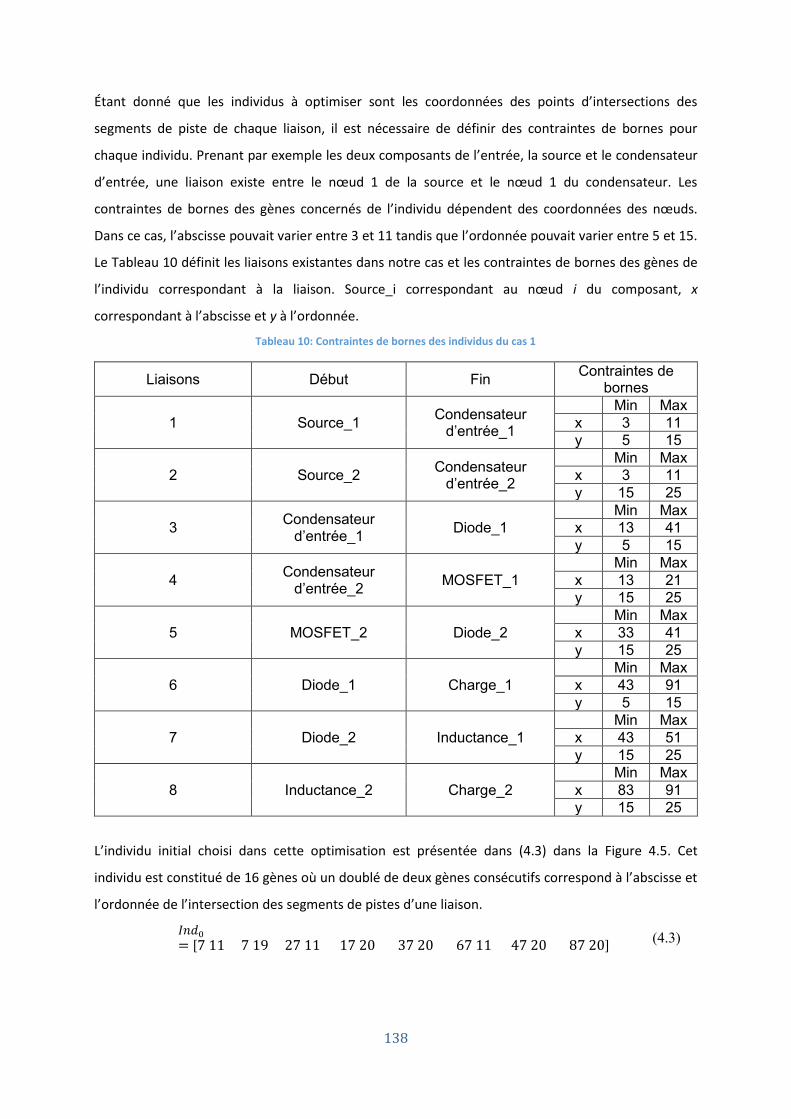
138
Étant donné que les individus à optimiser sont les coordonnées des points d’intersections des
segments de piste de chaque liaison, il est nécessaire de définir des contraintes de bornes pour
chaque individu. Prenant par exemple les deux composants de l’entrée, la source et le condensateur
d’entrée, une liaison existe entre le nœud 1 de la source et le nœud 1 du condensateur. Les
contraintes de bornes des gènes concernés de l’individu dépendent des coordonnées des nœuds.
Dans ce cas, l’abscisse pouvait varier entre 3 et 11 tandis que l’ordonnée pouvait varier entre 5 et 15.
Le Tableau 10 définit les liaisons existantes dans notre cas et les contraintes de bornes des gènes de
l’individu correspondant à la liaison. Source_i correspondant au nœud i du composant, x
correspondant à l’abscisse et y à l’ordonnée.
Tableau 10: Contraintes de bornes des individus du cas 1
Liaisons Début Fin Contraintes de bornes
1 Source_1 Condensateur d’entrée_1
Min Max
x 3 11
y 5 15
2 Source_2 Condensateur d’entrée_2
Min Max
x 3 11
y 15 25
3 Condensateur d’entrée_1
Diode_1
Min Max
x 13 41
y 5 15
4 Condensateur d’entrée_2
MOSFET_1
Min Max
x 13 21
y 15 25
5 MOSFET_2 Diode_2
Min Max
x 33 41
y 15 25
6 Diode_1 Charge_1
Min Max
x 43 91
y 5 15
7 Diode_2 Inductance_1
Min Max
x 43 51
y 15 25
8 Inductance_2 Charge_2
Min Max
x 83 91
y 15 25
L’individu initial choisi dans cette optimisation est présentée dans (4.3) dans la Figure 4.5. Cet
individu est constitué de 16 gènes où un doublé de deux gènes consécutifs correspond à l’abscisse et
l’ordonnée de l’intersection des segments de pistes d’une liaison.
(4.3)
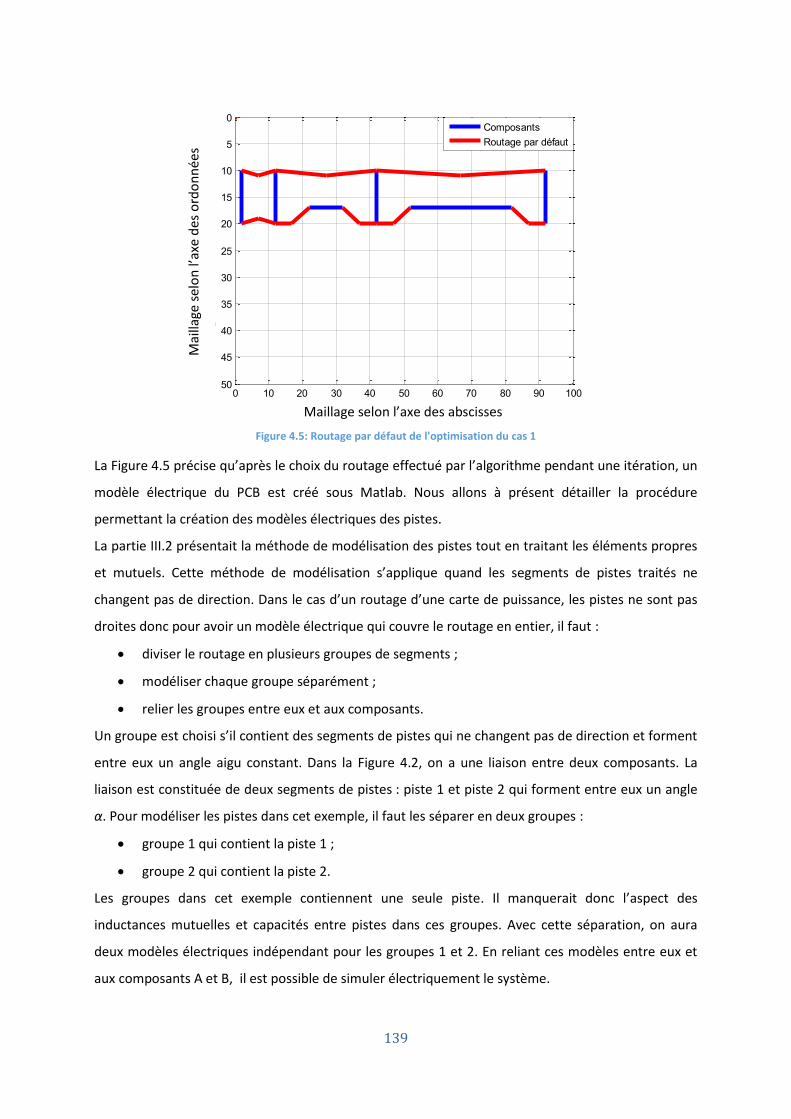
139
Figure 4.5: Routage par défaut de l'optimisation du cas 1
La Figure 4.5 précise qu’après le choix du routage effectué par l’algorithme pendant une itération, un
modèle électrique du PCB est créé sous Matlab. Nous allons à présent détailler la procédure
permettant la création des modèles électriques des pistes.
La partie III.2 présentait la méthode de modélisation des pistes tout en traitant les éléments propres
et mutuels. Cette méthode de modélisation s’applique quand les segments de pistes traités ne
changent pas de direction. Dans le cas d’un routage d’une carte de puissance, les pistes ne sont pas
droites donc pour avoir un modèle électrique qui couvre le routage en entier, il faut :
diviser le routage en plusieurs groupes de segments ;
modéliser chaque groupe séparément ;
relier les groupes entre eux et aux composants.
Un groupe est choisi s’il contient des segments de pistes qui ne changent pas de direction et forment
entre eux un angle aigu constant. Dans la Figure 4.2, on a une liaison entre deux composants. La
liaison est constituée de deux segments de pistes : piste 1 et piste 2 qui forment entre eux un angle
α. Pour modéliser les pistes dans cet exemple, il faut les séparer en deux groupes :
groupe 1 qui contient la piste 1 ;
groupe 2 qui contient la piste 2.
Les groupes dans cet exemple contiennent une seule piste. Il manquerait donc l’aspect des
inductances mutuelles et capacités entre pistes dans ces groupes. Avec cette séparation, on aura
deux modèles électriques indépendant pour les groupes 1 et 2. En reliant ces modèles entre eux et
aux composants A et B, il est possible de simuler électriquement le système.
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
45
50
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
Composants
Routage par défaut
Mai
llage
sel
on
l’ax
e d
es o
rdo
nn
ées
Maillage selon l’axe des abscisses
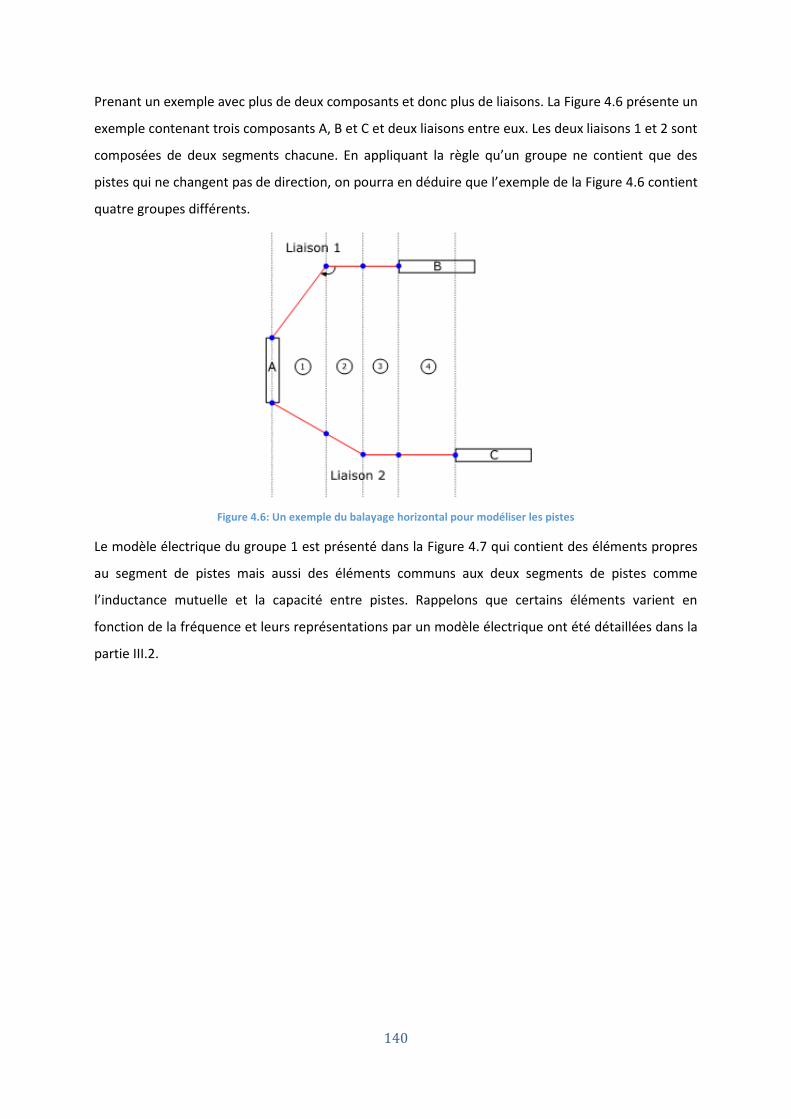
140
Prenant un exemple avec plus de deux composants et donc plus de liaisons. La Figure 4.6 présente un
exemple contenant trois composants A, B et C et deux liaisons entre eux. Les deux liaisons 1 et 2 sont
composées de deux segments chacune. En appliquant la règle qu’un groupe ne contient que des
pistes qui ne changent pas de direction, on pourra en déduire que l’exemple de la Figure 4.6 contient
quatre groupes différents.
Figure 4.6: Un exemple du balayage horizontal pour modéliser les pistes
Le modèle électrique du groupe 1 est présenté dans la Figure 4.7 qui contient des éléments propres
au segment de pistes mais aussi des éléments communs aux deux segments de pistes comme
l’inductance mutuelle et la capacité entre pistes. Rappelons que certains éléments varient en
fonction de la fréquence et leurs représentations par un modèle électrique ont été détaillées dans la
partie III.2.
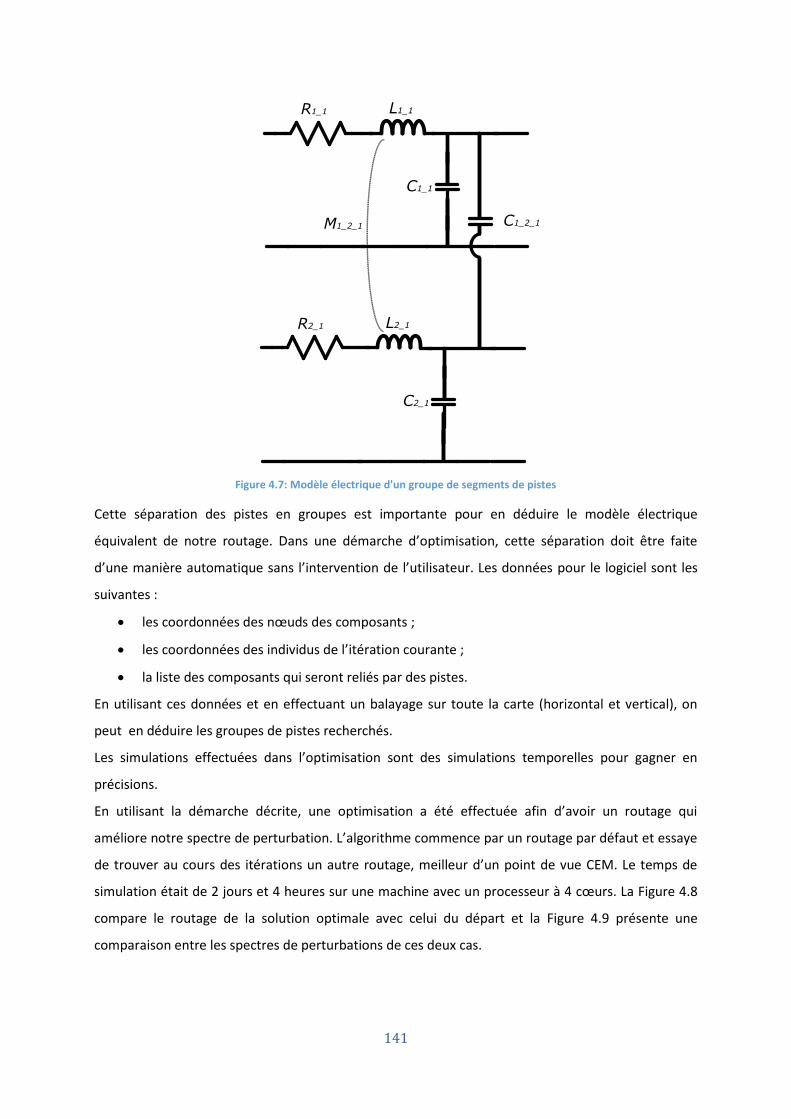
141
Figure 4.7: Modèle électrique d'un groupe de segments de pistes
Cette séparation des pistes en groupes est importante pour en déduire le modèle électrique
équivalent de notre routage. Dans une démarche d’optimisation, cette séparation doit être faite
d’une manière automatique sans l’intervention de l’utilisateur. Les données pour le logiciel sont les
suivantes :
les coordonnées des nœuds des composants ;
les coordonnées des individus de l’itération courante ;
la liste des composants qui seront reliés par des pistes.
En utilisant ces données et en effectuant un balayage sur toute la carte (horizontal et vertical), on
peut en déduire les groupes de pistes recherchés.
Les simulations effectuées dans l’optimisation sont des simulations temporelles pour gagner en
précisions.
En utilisant la démarche décrite, une optimisation a été effectuée afin d’avoir un routage qui
améliore notre spectre de perturbation. L’algorithme commence par un routage par défaut et essaye
de trouver au cours des itérations un autre routage, meilleur d’un point de vue CEM. Le temps de
simulation était de 2 jours et 4 heures sur une machine avec un processeur à 4 cœurs. La Figure 4.8
compare le routage de la solution optimale avec celui du départ et la Figure 4.9 présente une
comparaison entre les spectres de perturbations de ces deux cas.
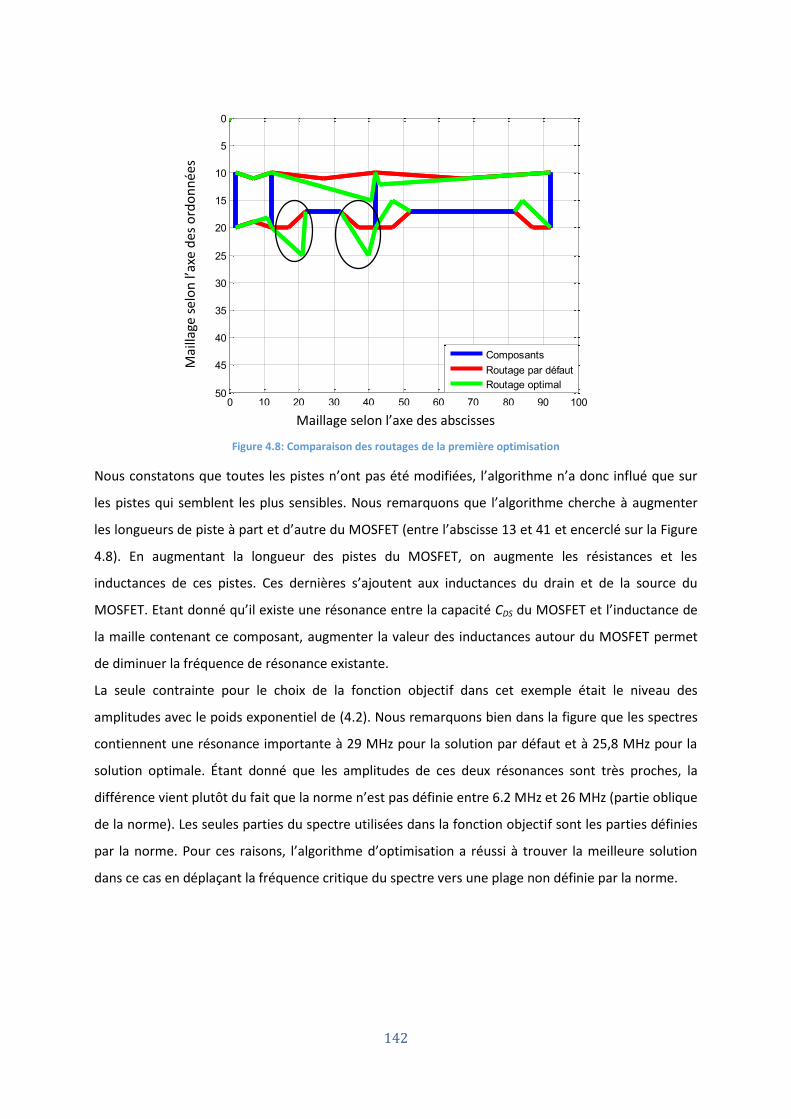
142
Figure 4.8: Comparaison des routages de la première optimisation
Nous constatons que toutes les pistes n’ont pas été modifiées, l’algorithme n’a donc influé que sur
les pistes qui semblent les plus sensibles. Nous remarquons que l’algorithme cherche à augmenter
les longueurs de piste à part et d’autre du MOSFET (entre l’abscisse 13 et 41 et encerclé sur la Figure
4.8). En augmentant la longueur des pistes du MOSFET, on augmente les résistances et les
inductances de ces pistes. Ces dernières s’ajoutent aux inductances du drain et de la source du
MOSFET. Etant donné qu’il existe une résonance entre la capacité CDS du MOSFET et l’inductance de
la maille contenant ce composant, augmenter la valeur des inductances autour du MOSFET permet
de diminuer la fréquence de résonance existante.
La seule contrainte pour le choix de la fonction objectif dans cet exemple était le niveau des
amplitudes avec le poids exponentiel de (4.2). Nous remarquons bien dans la figure que les spectres
contiennent une résonance importante à 29 MHz pour la solution par défaut et à 25,8 MHz pour la
solution optimale. Étant donné que les amplitudes de ces deux résonances sont très proches, la
différence vient plutôt du fait que la norme n’est pas définie entre 6.2 MHz et 26 MHz (partie oblique
de la norme). Les seules parties du spectre utilisées dans la fonction objectif sont les parties définies
par la norme. Pour ces raisons, l’algorithme d’optimisation a réussi à trouver la meilleure solution
dans ce cas en déplaçant la fréquence critique du spectre vers une plage non définie par la norme.
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
45
50
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
Composants
Routage par défaut
Routage optimal
Mai
llage
sel
on
l’ax
e d
es o
rdo
nn
ées
Maillage selon l’axe des abscisses
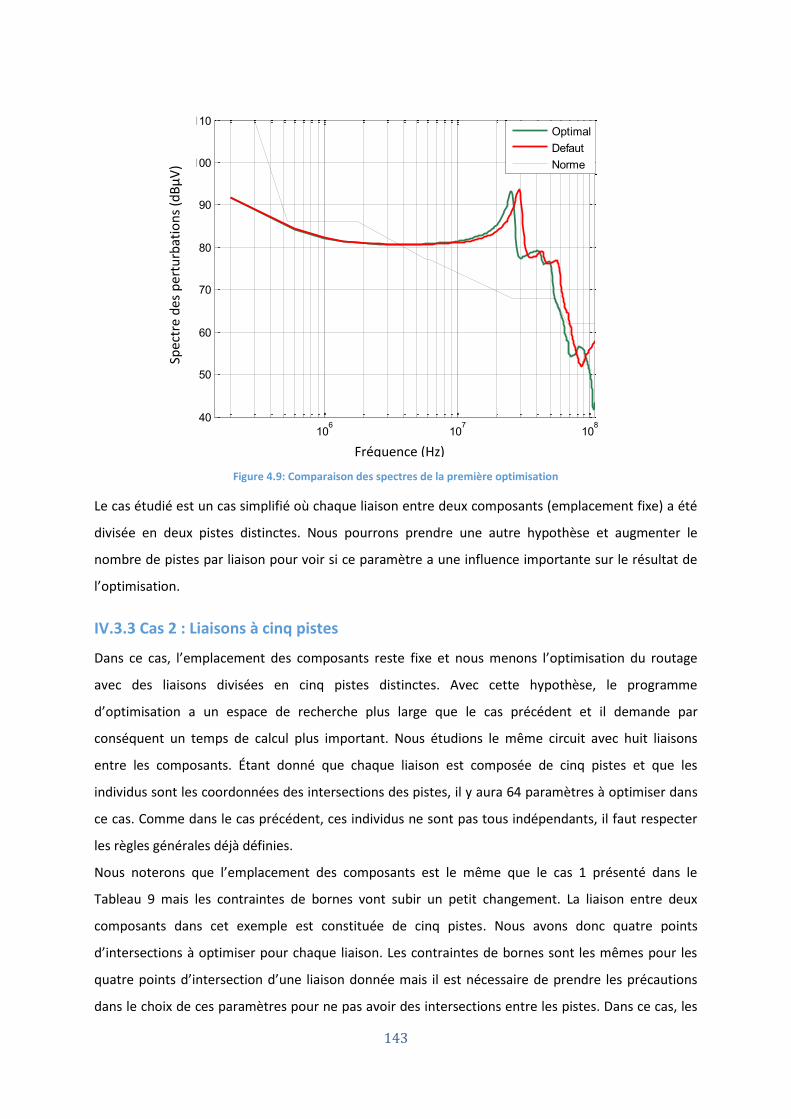
143
Figure 4.9: Comparaison des spectres de la première optimisation
Le cas étudié est un cas simplifié où chaque liaison entre deux composants (emplacement fixe) a été
divisée en deux pistes distinctes. Nous pourrons prendre une autre hypothèse et augmenter le
nombre de pistes par liaison pour voir si ce paramètre a une influence importante sur le résultat de
l’optimisation.
IV.3.3 Cas 2 : Liaisons à cinq pistes
Dans ce cas, l’emplacement des composants reste fixe et nous menons l’optimisation du routage
avec des liaisons divisées en cinq pistes distinctes. Avec cette hypothèse, le programme
d’optimisation a un espace de recherche plus large que le cas précédent et il demande par
conséquent un temps de calcul plus important. Nous étudions le même circuit avec huit liaisons
entre les composants. Étant donné que chaque liaison est composée de cinq pistes et que les
individus sont les coordonnées des intersections des pistes, il y aura 64 paramètres à optimiser dans
ce cas. Comme dans le cas précédent, ces individus ne sont pas tous indépendants, il faut respecter
les règles générales déjà définies.
Nous noterons que l’emplacement des composants est le même que le cas 1 présenté dans le
Tableau 9 mais les contraintes de bornes vont subir un petit changement. La liaison entre deux
composants dans cet exemple est constituée de cinq pistes. Nous avons donc quatre points
d’intersections à optimiser pour chaque liaison. Les contraintes de bornes sont les mêmes pour les
quatre points d’intersection d’une liaison donnée mais il est nécessaire de prendre les précautions
dans le choix de ces paramètres pour ne pas avoir des intersections entre les pistes. Dans ce cas, les
106
107
108
40
50
60
70
80
90
100
110
Fréquence [Hz]
Sp
ectr
e d
es p
ert
urb
atio
ns [d
Bµ
V]
Optimal
Defaut
NormeSp
ectr
e d
es p
ertu
rbat
ion
s (d
Bµ
V)
Fréquence (Hz)
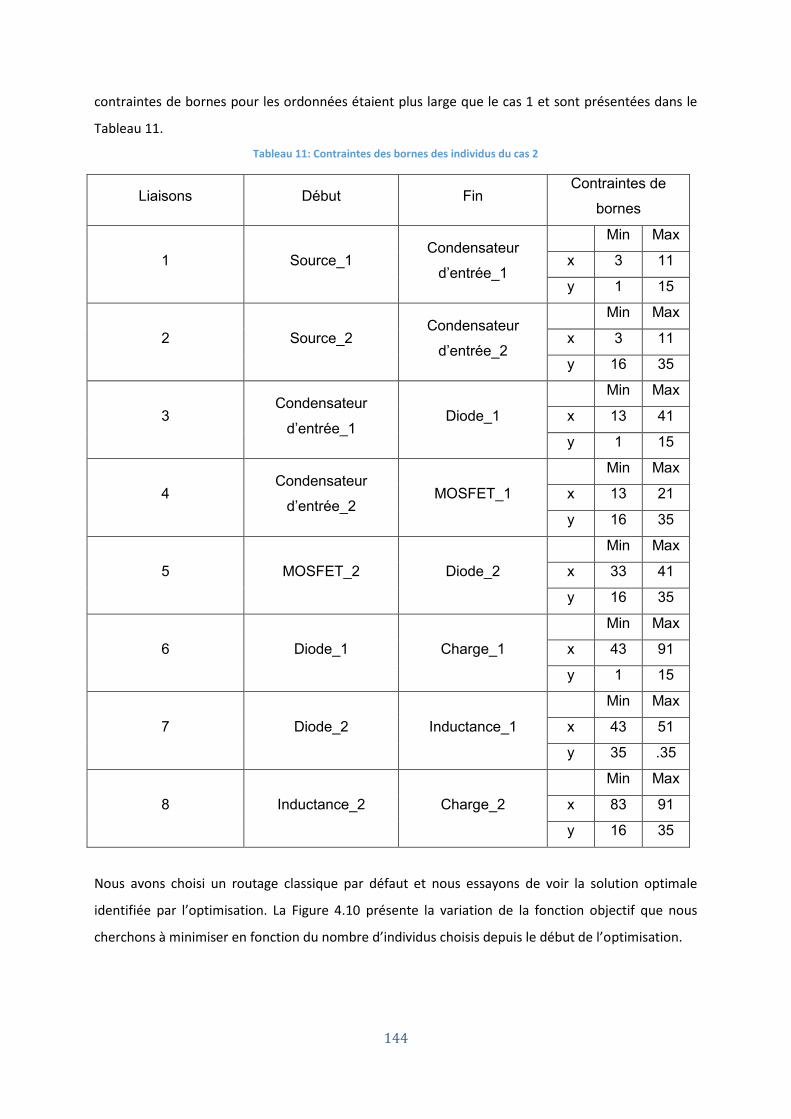
144
contraintes de bornes pour les ordonnées étaient plus large que le cas 1 et sont présentées dans le
Tableau 11.
Tableau 11: Contraintes des bornes des individus du cas 2
Liaisons Début Fin Contraintes de
bornes
1 Source_1 Condensateur
d’entrée_1
Min Max
x 3 11
y 1 15
2 Source_2 Condensateur
d’entrée_2
Min Max
x 3 11
y 16 35
3 Condensateur
d’entrée_1 Diode_1
Min Max
x 13 41
y 1 15
4 Condensateur
d’entrée_2 MOSFET_1
Min Max
x 13 21
y 16 35
5 MOSFET_2 Diode_2
Min Max
x 33 41
y 16 35
6 Diode_1 Charge_1
Min Max
x 43 91
y 1 15
7 Diode_2 Inductance_1
Min Max
x 43 51
y 35 .35
8 Inductance_2 Charge_2
Min Max
x 83 91
y 16 35
Nous avons choisi un routage classique par défaut et nous essayons de voir la solution optimale
identifiée par l’optimisation. La Figure 4.10 présente la variation de la fonction objectif que nous
cherchons à minimiser en fonction du nombre d’individus choisis depuis le début de l’optimisation.
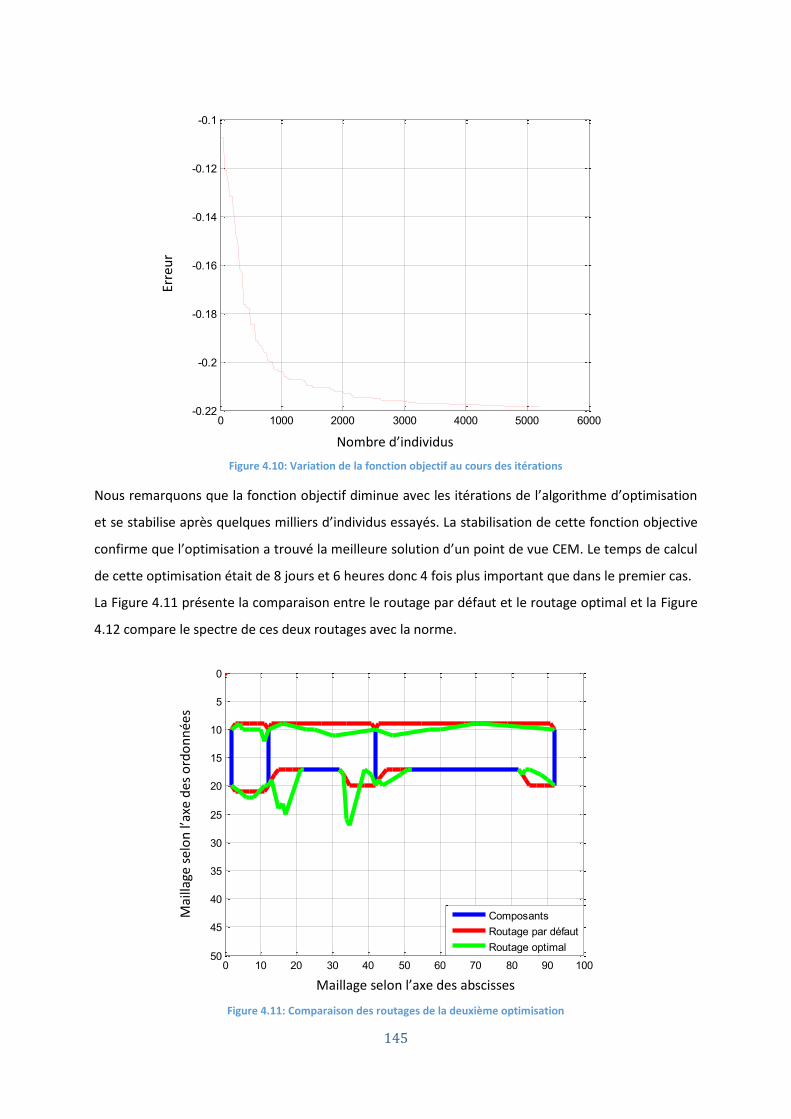
145
Figure 4.10: Variation de la fonction objectif au cours des itérations
Nous remarquons que la fonction objectif diminue avec les itérations de l’algorithme d’optimisation
et se stabilise après quelques milliers d’individus essayés. La stabilisation de cette fonction objective
confirme que l’optimisation a trouvé la meilleure solution d’un point de vue CEM. Le temps de calcul
de cette optimisation était de 8 jours et 6 heures donc 4 fois plus important que dans le premier cas.
La Figure 4.11 présente la comparaison entre le routage par défaut et le routage optimal et la Figure
4.12 compare le spectre de ces deux routages avec la norme.
Figure 4.11: Comparaison des routages de la deuxième optimisation
0 1000 2000 3000 4000 5000 6000-0.22
-0.2
-0.18
-0.16
-0.14
-0.12
-0.1
Nombre d'individus
Err
eu
r
0 10 20 30 40 50 60 70 80 90 100
0
5
10
15
20
25
30
35
40
45
50
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
Composants
Routage par défaut
Routage optimal
Erre
ur
Nombre d’individus
Mai
llage
sel
on
l’ax
e d
es o
rdo
nn
ées
Maillage selon l’axe des abscisses
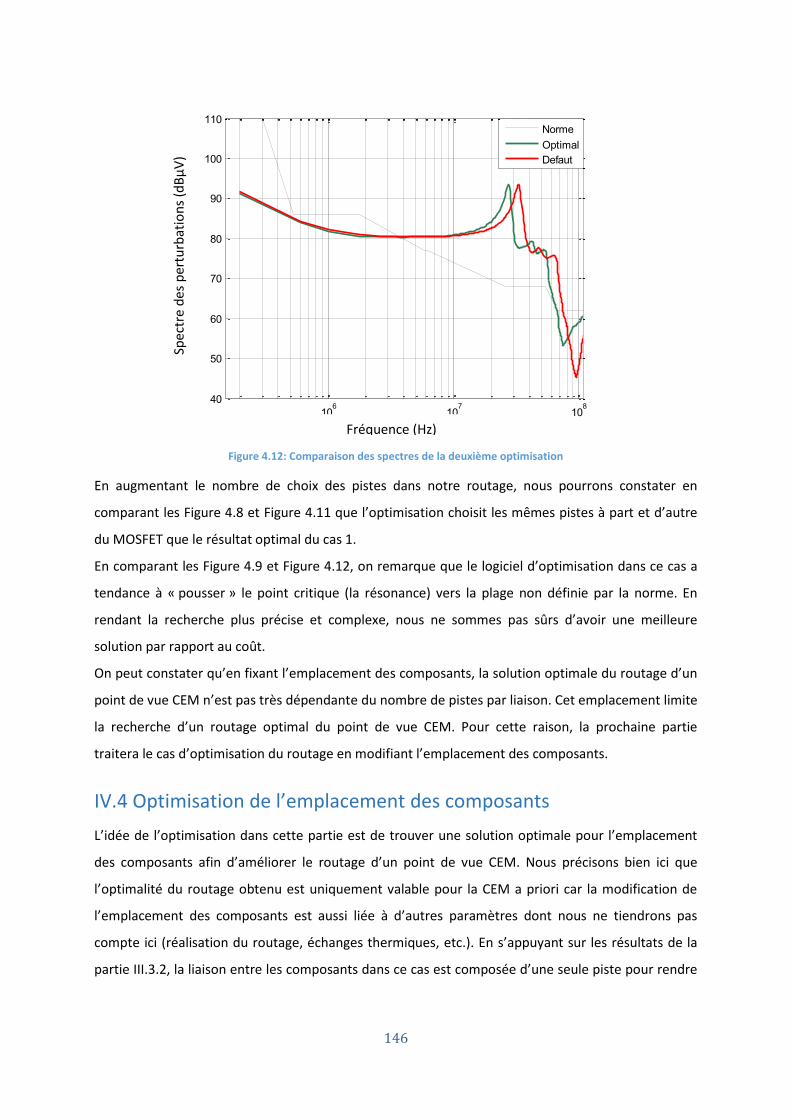
146
Figure 4.12: Comparaison des spectres de la deuxième optimisation
En augmentant le nombre de choix des pistes dans notre routage, nous pourrons constater en
comparant les Figure 4.8 et Figure 4.11 que l’optimisation choisit les mêmes pistes à part et d’autre
du MOSFET que le résultat optimal du cas 1.
En comparant les Figure 4.9 et Figure 4.12, on remarque que le logiciel d’optimisation dans ce cas a
tendance à « pousser » le point critique (la résonance) vers la plage non définie par la norme. En
rendant la recherche plus précise et complexe, nous ne sommes pas sûrs d’avoir une meilleure
solution par rapport au coût.
On peut constater qu’en fixant l’emplacement des composants, la solution optimale du routage d’un
point de vue CEM n’est pas très dépendante du nombre de pistes par liaison. Cet emplacement limite
la recherche d’un routage optimal du point de vue CEM. Pour cette raison, la prochaine partie
traitera le cas d’optimisation du routage en modifiant l’emplacement des composants.
IV.4 Optimisation de l’emplacement des composants
L’idée de l’optimisation dans cette partie est de trouver une solution optimale pour l’emplacement
des composants afin d’améliorer le routage d’un point de vue CEM. Nous précisons bien ici que
l’optimalité du routage obtenu est uniquement valable pour la CEM a priori car la modification de
l’emplacement des composants est aussi liée à d’autres paramètres dont nous ne tiendrons pas
compte ici (réalisation du routage, échanges thermiques, etc.). En s’appuyant sur les résultats de la
partie III.3.2, la liaison entre les composants dans ce cas est composée d’une seule piste pour rendre
106
107
108
40
50
60
70
80
90
100
110
Sp
ectr
e d
es p
ert
urb
atio
ns [d
Bµ
V]
Fréquence [Hz]
Norme
Optimal
Defaut
Spec
tre
des
per
turb
atio
ns
(dB
µV
)
Fréquence (Hz)
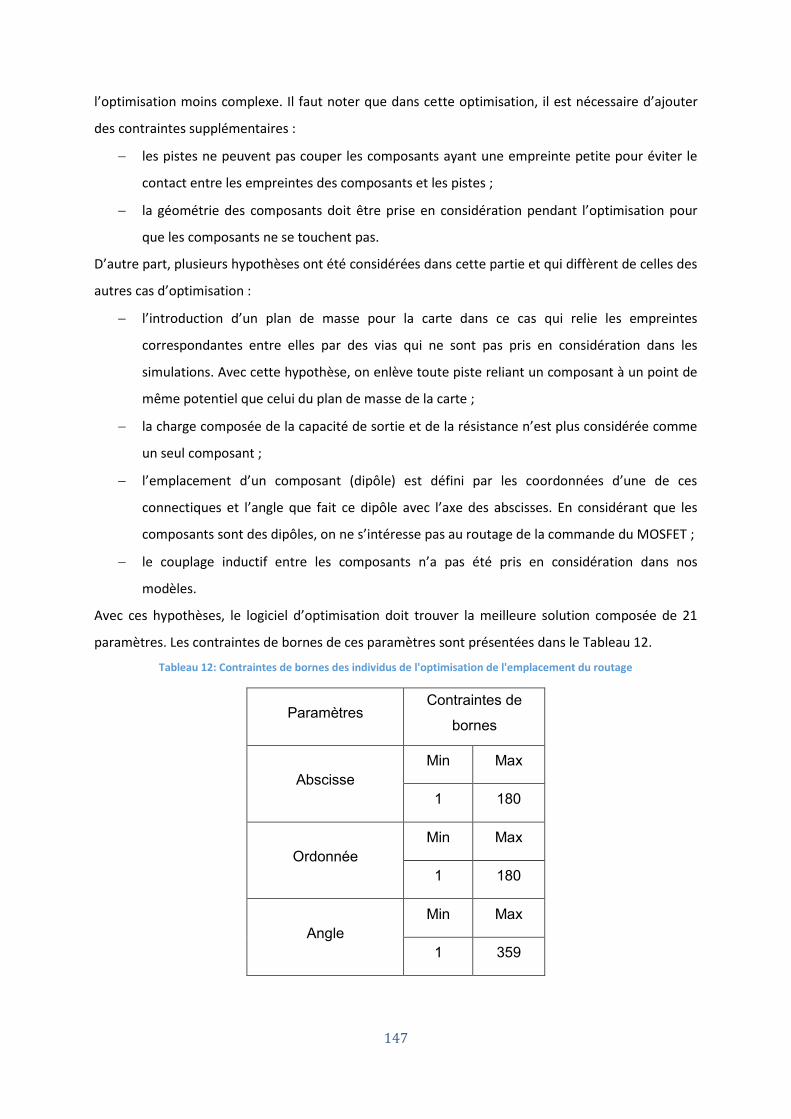
147
l’optimisation moins complexe. Il faut noter que dans cette optimisation, il est nécessaire d’ajouter
des contraintes supplémentaires :
les pistes ne peuvent pas couper les composants ayant une empreinte petite pour éviter le
contact entre les empreintes des composants et les pistes ;
la géométrie des composants doit être prise en considération pendant l’optimisation pour
que les composants ne se touchent pas.
D’autre part, plusieurs hypothèses ont été considérées dans cette partie et qui diffèrent de celles des
autres cas d’optimisation :
l’introduction d’un plan de masse pour la carte dans ce cas qui relie les empreintes
correspondantes entre elles par des vias qui ne sont pas pris en considération dans les
simulations. Avec cette hypothèse, on enlève toute piste reliant un composant à un point de
même potentiel que celui du plan de masse de la carte ;
la charge composée de la capacité de sortie et de la résistance n’est plus considérée comme
un seul composant ;
l’emplacement d’un composant (dipôle) est défini par les coordonnées d’une de ces
connectiques et l’angle que fait ce dipôle avec l’axe des abscisses. En considérant que les
composants sont des dipôles, on ne s’intéresse pas au routage de la commande du MOSFET ;
le couplage inductif entre les composants n’a pas été pris en considération dans nos
modèles.
Avec ces hypothèses, le logiciel d’optimisation doit trouver la meilleure solution composée de 21
paramètres. Les contraintes de bornes de ces paramètres sont présentées dans le Tableau 12.
Tableau 12: Contraintes de bornes des individus de l'optimisation de l'emplacement du routage
Paramètres Contraintes de
bornes
Abscisse
Min Max
1 180
Ordonnée
Min Max
1 180
Angle
Min Max
1 359
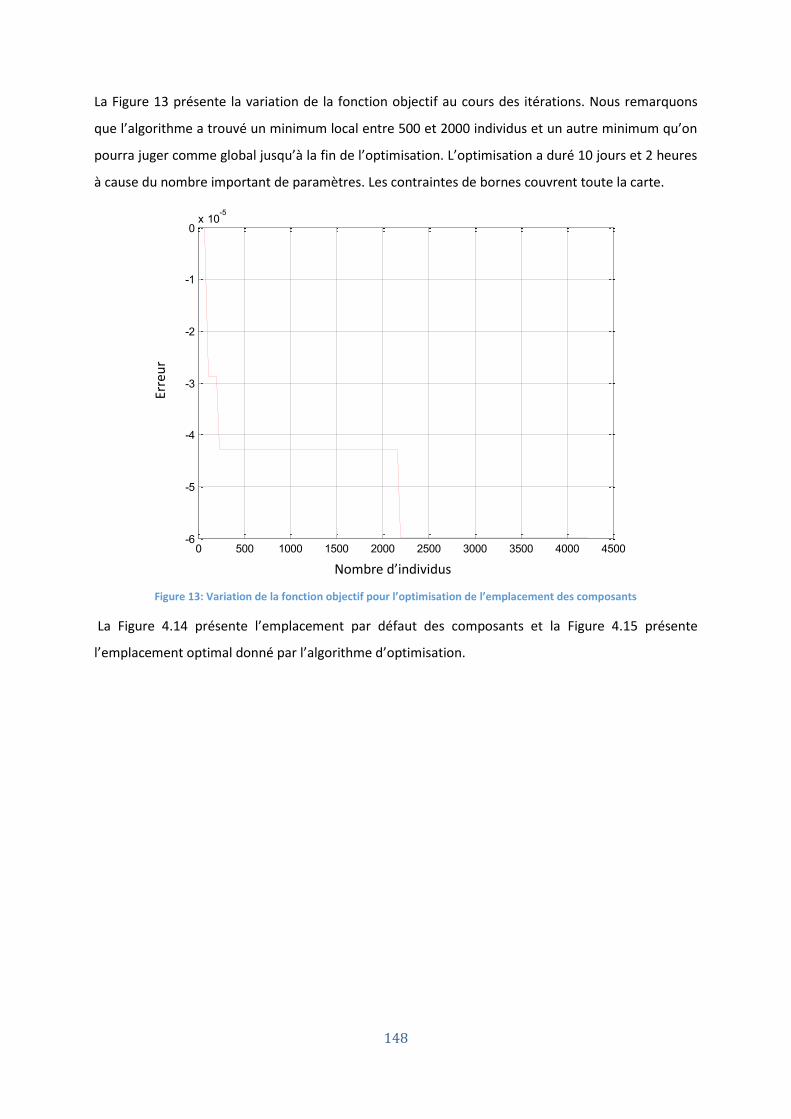
148
La Figure 13 présente la variation de la fonction objectif au cours des itérations. Nous remarquons
que l’algorithme a trouvé un minimum local entre 500 et 2000 individus et un autre minimum qu’on
pourra juger comme global jusqu’à la fin de l’optimisation. L’optimisation a duré 10 jours et 2 heures
à cause du nombre important de paramètres. Les contraintes de bornes couvrent toute la carte.
Figure 13: Variation de la fonction objectif pour l’optimisation de l’emplacement des composants
La Figure 4.14 présente l’emplacement par défaut des composants et la Figure 4.15 présente
l’emplacement optimal donné par l’algorithme d’optimisation.
0 500 1000 1500 2000 2500 3000 3500 4000 4500-6
-5
-4
-3
-2
-1
0x 10
-5
Nombre d'individus
Err
eu
rEr
reu
r
Nombre d’individus
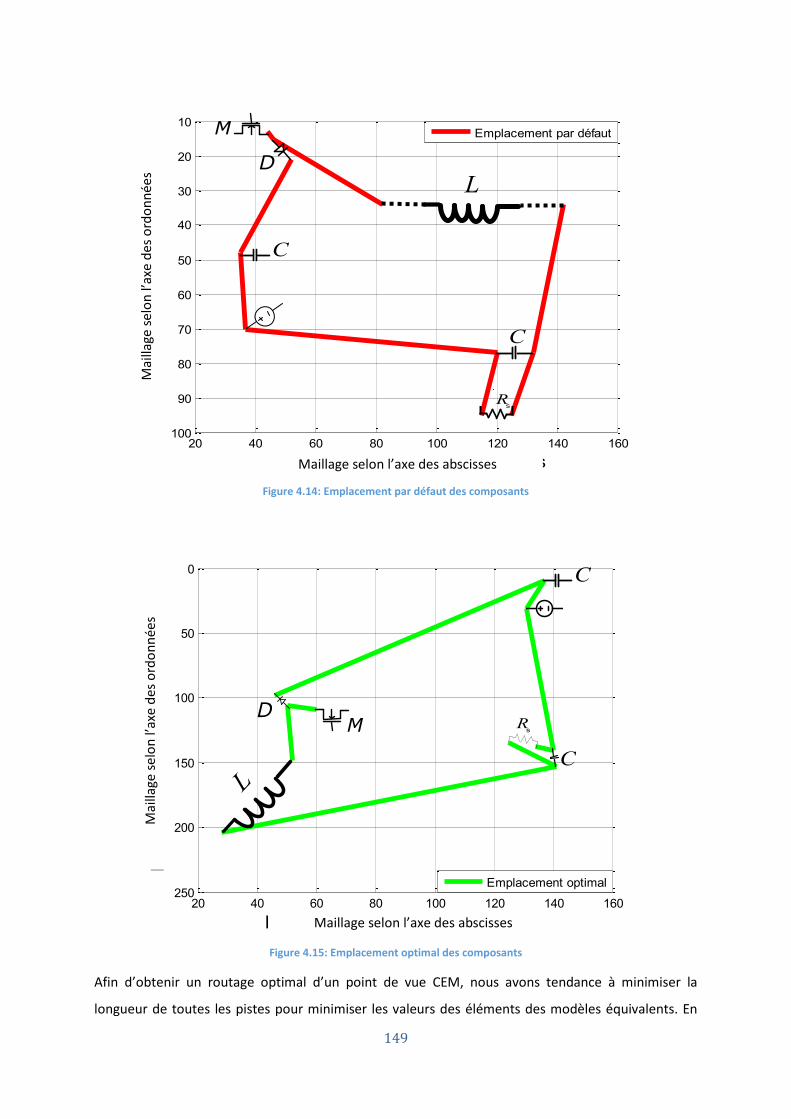
149
Figure 4.14: Emplacement par défaut des composants
Figure 4.15: Emplacement optimal des composants
Afin d’obtenir un routage optimal d’un point de vue CEM, nous avons tendance à minimiser la
longueur de toutes les pistes pour minimiser les valeurs des éléments des modèles équivalents. En
20 40 60 80 100 120 140 160
0
50
100
150
200
250
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
Emplacement optimal
20 40 60 80 100 120 140 160
10
20
30
40
50
60
70
80
90
100
Maillage selon l'axe des abscisses
Ma
illa
ge
se
lon
l'a
xe
de
s o
rdo
nn
ée
s
Emplacement par défaut
Mai
llage
sel
on
l’ax
e d
es o
rdo
nn
ées
Mai
llage
sel
on
l’ax
e d
es o
rdo
nn
ées
Maillage selon l’axe des abscisses
Maillage selon l’axe des abscisses
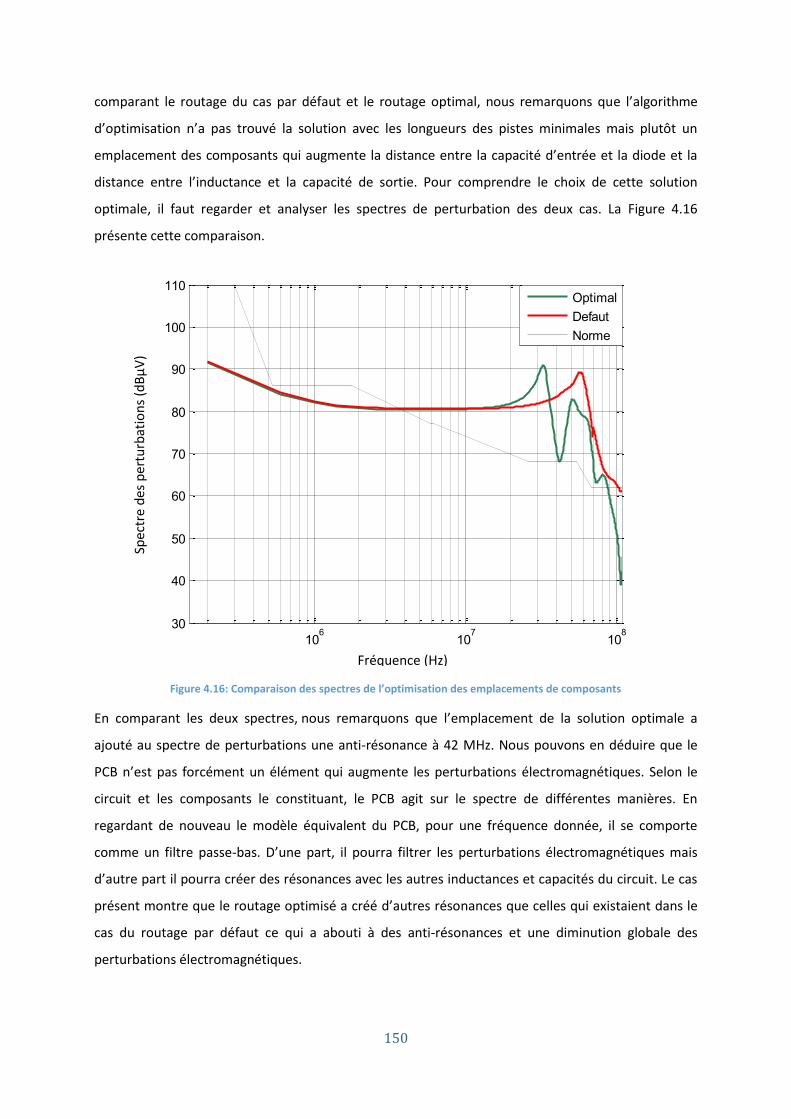
150
comparant le routage du cas par défaut et le routage optimal, nous remarquons que l’algorithme
d’optimisation n’a pas trouvé la solution avec les longueurs des pistes minimales mais plutôt un
emplacement des composants qui augmente la distance entre la capacité d’entrée et la diode et la
distance entre l’inductance et la capacité de sortie. Pour comprendre le choix de cette solution
optimale, il faut regarder et analyser les spectres de perturbation des deux cas. La Figure 4.16
présente cette comparaison.
Figure 4.16: Comparaison des spectres de l’optimisation des emplacements de composants
En comparant les deux spectres, nous remarquons que l’emplacement de la solution optimale a
ajouté au spectre de perturbations une anti-résonance à 42 MHz. Nous pouvons en déduire que le
PCB n’est pas forcément un élément qui augmente les perturbations électromagnétiques. Selon le
circuit et les composants le constituant, le PCB agit sur le spectre de différentes manières. En
regardant de nouveau le modèle équivalent du PCB, pour une fréquence donnée, il se comporte
comme un filtre passe-bas. D’une part, il pourra filtrer les perturbations électromagnétiques mais
d’autre part il pourra créer des résonances avec les autres inductances et capacités du circuit. Le cas
présent montre que le routage optimisé a créé d’autres résonances que celles qui existaient dans le
cas du routage par défaut ce qui a abouti à des anti-résonances et une diminution globale des
perturbations électromagnétiques.
106
107
108
30
40
50
60
70
80
90
100
110
Fréquence [Hz]
Sp
ectr
e d
es p
ert
urb
atio
ns [d
Bµ
V]
Optimal
Defaut
Norme
Spec
tre
des
per
turb
atio
ns
(dB
µV
)
Fréquence (Hz)

151
IV.5 Conclusion
Dans ce dernier chapitre, nous avons présenté une approche d’optimisation de routage et
d’emplacement de composants en utilisant les différents modèles développés dans les chapitres
précédents. Le but recherché par cette optimisation est de minimiser l’amplitude des perturbations
électromagnétiques ou bien de les repousser vers les fréquences non couvertes par la norme. Les
résultats obtenus montrent qu’il est possible d’améliorer de point de vue CEM le comportement du
convertisseur en utilisant un bon routage et un emplacement optimal des composants. A ce stade,
cette approche représente un début d’investigation du routage des cartes d’électronique de
puissance d’un point de vue CEM et nécessite des améliorations telles que la prise en compte du
couplage inter-composants et une réduction du temps de simulation.

152

153
154
Conclusions et Perspectives

155
156
1. Conclusions générales
Avec l'électrification des moyens de transports (automobile et aéronautique), on constate une
intégration croissante l’électronique de puissance dans le but d’améliorer les performances des
dispositifs électriques. Cette amélioration a entrainé en contrepartie l’aggravation des problèmes
CEM en rayonné et en conduit. Généralement, cette problématique CEM n’est pas prise en
considération dans le début du processus de conception et elle intervient un peu tardivement lors de
la phase de prototypage. Cette démarche peut s’avérer coûteuse en temps et sur le plan économique
car elle pourra nécessiter l’utilisation de filtres volumineux, un blindage et même dans certains cas
remettre en cause le design. Pour lever les risques CEM dès la phase de la conception, il serait
intéressant d’intégrer la contrainte CEM dans le processus d’optimisation au même niveau que les
autres contraintes (thermique, mécanique, …). Pour atteindre cet objectif, il est nécessaire de
disposer d’une part de modèles multi-niveaux de composants permettant de refléter le
comportement réel du composant sur une large bande de fréquence et d’autre part de
méthodologies d’analyse permettant de prédire le profil des perturbations.
Les travaux présentés dans ce rapport entrent dans cette optique. Ils ont permis de développer des
approches de caractérisation des composants de puissance sur une large bande de fréquence. Ces
modèles vont servir pour prédire les perturbations générées par les convertisseurs de puissance et
anticiper des solutions pour les réduire. Les différents modèles développés sont compatibles avec
des outils de simulations type Spice. Les travaux ont porté sur quatre axes importants et
complémentaires.
La première partie a été consacrée à la modélisation des composants passifs. Une démarche a été
présentée en utilisant des formulations analytiques qui permettent de réaliser des modèles
électriques équivalents suffisants pour lever le risque CEM. Cette méthode a été utilisée dans le cas
d’un solénoïde et d’un condensateur céramique multicouches. L’avantage de cette méthode est
qu’elle peut être utilisée lors du dimensionnement car elle ne nécessite pas l’utilisation physique du
composant. La deuxième approche de modélisation est basée sur la mesure. Cette technique
nécessite l’utilisation de modèles électriques génériques. A cause de l’incertitude de l’appareil de
mesure, trois techniques de mesure ont été présentées pour la détermination des éléments
électriques du modèle.
La deuxième partie du rapport a été consacrée à la modélisation du MOSFET. Une démarche
originale basée sur la mesure a été développée pour déterminer les éléments parasites du modèle du
MOSFET. Ces éléments sont obtenus à partir de la caractéristique statique et dynamique du
composant. Cette approche a nécessité l’utilisation un T de polarisation pour réaliser les mesures
sous tension. Pour étudier la validité de notre approche, nous avons utilisé le modèle du MOSFET
157
pour prédire les perturbations générées par un convertisseur DC/DCLes résultats obtenus par notre
modèle ont été comparés aux différents résultats obtenus par des modèles fournis par le
constructeur et la librairie LT Spice, mais aussi à la mesure à travers une maquette d’un convertisseur
DC/DC réalisée au laboratoire.
La troisième partie du rapport a été consacrée à la modélisation du PCB ainsi que son optimisation
dans le but de réduire ou/et décaler les perturbations. Pour la partie modélisation, une méthode
hybride utilisant la méthode des moments et la méthode PEEC pour déterminer les éléments du
modèle électrique du PCB a été élaborée. Cette approche a été comparée avec d’autres méthodes
dans le cas d’une piste simple et dans le cas du convertisseur DC/DC.
Le dernier chapitre a été consacré à l’optimisation du routage et à l’emplacement des composants.
En effet, la démarche proposée intègre les modèles des composants et des pistes déjà développés
dans les chapitres précédents. Les premiers résultats ont montré l’importance de point de vue CEM
du PCB et de l’emplacement des composants et surtout des pistes au voisinage de la source de
perturbation.
2. Perspectives
En complémentarité à ces travaux, des améliorations peuvent être envisagées sur les différentes
approches développées. Parmi les points à améliorer, on peut citer :
Amélioration des modèles analytiques pour la caractérisation des bobines en intégrant dans
les formules analytiques avec le taux de remplissage du bobinage, les effets des isolants du
fils, l’influence de la fréquence sur le noyau magnétique, …… .
Généralisation de l’approche analytique dans le cas d’une bobine torique et un
transformateur.
Amélioration du modèle du MOSFET en assurant plus de stabilité lors de la simulation. Des
tests de simulation peuvent être réalisés pour connaître ses limites de convergences et son
domaine de validité dans le domaine temporel. À partir de ces informations, des éléments
passifs peuvent être ajoutés au modèle sans changer son comportement mais dans le but
d’améliorer la stabilité et le temps de calcul. Par exemple, une résistance de 1 MΩ en
parallèle d’un composant est presque l’équivalent d’un circuit ouvert mais, en simulation,
cette résistance aide à la convergence du circuit. Une capacité de quelques dizaines de fF
entre un nœud du circuit et la masse aide la convergence sans avoir un effet sur le
comportement du MOSFET;

158
Rajout du couplage entre les différents types de composants (passifs ou actifs) afin de
comprendre son effet sur le spectre de perturbation. Par exemple, le couplage entre les
bobines et les inductances parasites des condensateurs pourra être étudié ;
Introduction d’autres phénomènes dans la modélisation du PCB. Par exemple, la liaison entre
deux pistes se fait généralement avec un coude. Ce dernier possède un modèle électrique
qui pourra affecter la modélisation du PCB en fonction de la fréquence. Un autre aspect qui
pourra améliorer la modélisation du PCB d’une carte est la prise en compte des modèles de
vias qui interviennent dans les cartes multicouches. Dans les modèles abordés dans ces
travaux, le plan de masse a été considéré de taille infinie par rapport aux dimensions des
pistes. Une amélioration pourra consister à rajouter l’influence des dimensions du plan de
masse. La présence des fentes dans le plan de masse aura aussi un effet sur les modèles du
PCB dans la plage de fréquence concernée. Prendre en considération les imperfections du
plan de masse va affecter le modèle des pistes ;
Amélioration de l’optimisation du routage en ajoutant d’autres aspects physiques.
L’optimisation se basait principalement sur la géométrie de la carte et du routage mais
d’autres aspects physiques peuvent affecter le choix du routage. Parmi eux, nous pourrons
citer l’aspect thermique, l’interaction entre les composants, le champ rayonné …
D’une façon générale, nous nous trouvons régulièrement dans des situations où nous choisissons
entre la précision de nos modèles et le temps de calcul. Des méthodes de réduction d’ordre de nos
simulations peuvent être étudiées pour vérifier si nous aurons un gain de temps sans perdre la
précision de nos calculs.

159
160
Références
[1] E. Scarry, “The Fall of TWA 800: The Possibility of Electromagnetic Interference”, The New York Review of Books, 1998
[2] R. Jan van Lueshout, S. N. van der Veer, R. Hensbroek, J. C. Korevaa, M. B. Vroom and M. J. Schultz, “Interference by new-generation mobile phones on critical care medical equipment”, PubMed Central, 2007
[3] https://webstore.iec.ch/publication/78
[4] C. R. Paul and S. A. Nasar, “Introduction to Electromagnetic Fields”, 2nd ed., McGraw-Hill, New York, 1987
[5] C. R. Paul, “Electromagnetics for Engineers: with Applications to Digital Systems and Electromagnetic Interference”, Wiley, Hoboken, NJ, 2004
[6] B. Keiser, Principles of Electromagnetic Compatibility, 3rd edition, Artech House, Dedham, MA, 1987
[7] N. Violette, D. R. J. White, and M. Violette, Electromagnetic Compatibility Handbook, Van Nostrand-Reinhold, New York, 1987
[8] J. J. Goedbloed, Electromagnetic Compatibility, Prentice-Hall, Englewood Cliffs, NJ, 1992
[9] G. C. Corazza, “Marconi’s history [radiocommunication]”, Proceedings of the IEEE, vol. 86, n°. 7, p. 1307-1311, Juillet 1998
[10] A. Hoyt Taylor, A. Crossley, “The use of ground wires at remote control stations”, Proceedings of the Institute of Radio Engineers, vol. 8, n°. 3, p. 171-190, Juin 1920
[11] L. J. Corbett, “The radio interference problem and the power company”, Journal of the A.I.E.E., vol. 44, n°. 10, p. 1057-1063, Octobre 1925
[12] J. R. Carson, “Signal-to-static interference ratio in radio telephony”, Proceedings of the Institute of Radio Engineers, vol. 11, n°. 3, Juin 1923
[13] A. Russel, “Inductive interference with communication circuits”, Journal of the Institution of Electrical Engineers, vol. 62, n°. 335, p. 941-946, Novembre 1924
[14] R. H. Marriot, “Interference”, Proceedings of the Institute of Radio Engineers, vol. 11, n°. 4, p. 375-388, Août 1923
[15] http://homepage.cs.uri.edu/faculty/wolfe/book/Readings/Reading03.htm
[16] http://www.computerhistory.org/timeline/
[17] A. Wall, “Historical perspective of the FCC rules for digital devices and a look to the future”, International Symposium on Electromagnetic Compatibility, Août 2004
[18] L. Tihanyi, “Electromagnetic compatibility in power electronics”, J. K. Eckert & Company, Inc., Florida, 1995
[19] J. A. Woody, “Modeling of parasitic effects in discrete passive components”, Rome Air Development Center, Air Force Systems Command, NY, Février 1983
[20] L. W. Turner, “Electronics Engineer’s Reference Book”, 4th Edition, Butterworth, 1976
[21] http://hyperphysics.phy-astr.gsu.edu/hbase/electronic/rescarb.html
[22] http://www.physics-and-radio-electronics.com
[23] http://www.resistorguide.com/wirewound-resistor/
[24] http://www.resistorguide.com/metal-film-resistor/
[25] Kemet, “Introduction to capacitor technologies”, Kemet Corporation, 2013
[26] https://en.wikipedia.org/wiki/Electrolytic_capacitor
161
[27] H. W. Ott, “Electromagnetic compatibility engineering”, Wiley, 2009
[28] http://www.globalspec.com/learnmore/electrical_electronic_components/electronic_components/film_capacitors
[29] W. Jung, “Op Amp Applications Handbook”, Analog Devices Inc., 2005
[30] R. C. Buchanan, “Ceramic Materials for Electronics”, 3rd edition, Marcel Dekker Inc, 2004
[31] https://en.wikipedia.org/wiki/Capacitor_types
[32] Q. H. Mazumder, “Introduction to engineering, an assessment and problem solving approach”, Taylor & Francis Group, 2016
[33] R. P. Deshpande, “Capacitors, Technology and Trends”, Tata McGraw Hull Education Private Limited, 2012
[34] S. C. Thierauf, “High-Speed Circuit Board Signal Integrity”, Artech House Inc., 2004
[35] W. K. Chen, “The Electrical Engineering Handbook”, Elsevier Inc., 2005
[36] http://fr.rs-online.com/web/
[37] A. Goldman, “Magnetic Components for Power Electronics”, Springer Science + Business Media, 2002
[38] W. G. Hurkey & W. H. Wölfle, “Transformers and Inductors for Power Electronics, Theory, Design and Applications”, John Wiley & Sons Ltd., 2013
[39] M. K. Kazimierczuk & G. Grandi, “High-Frequency Small-Signal Model of Ferrit Core Inductors”, IEEE Transactions on Magnetics, Vol. 35, n°. 5, p. 4185-4191, Septembre 1999
[40] Grover, F. W., Inductance Calculations, Dover, New York, 1964
[41] A. Carlos, “Mutual Inductance and Inductance Calculations by Maxwell's Method”
[42] A. Massarini, M. K. Kazimierczuk & G. Grandi, “Lumped Parameter Models for Single- and Multiple-Layer Inductors”, 27th Annual IEEE Power Electronics Specialists Conference, Juin 1996
[43] http://www.magneticsgroup.com/pdf/erods.pdf
[44] http://www.amidoncorp.com/product_images/specifications/2-36.pdf
[45] D. DeMaw, “Ferromagnetic Core Design Handbook”, Prentice-Hall, 1981
[46] A. Massarini & M. K. Kazimierczuk, “Self-Capacitance of Inductors”, IEEE Transaction on Power Electronics, Vol. 12, n°. 4, p. 671-676, Juillet 1997
[47] http://www.keysight.com/en/pdx-x202270-pn-E5071C/ena-series-network-analyzer?cc=FR&lc=fre
[48] H. Sun, Z. J. Kim, C. S. Park & T.Y. Yun, “Equivalent-Circuit Modeling for Multilayer Capacitors Based on Couples Transmission-Line Theory”, IEEE Transactions on Components, Packaging and Manufacturing Technology, Vol. 1, n°. 5, p. 731-741, Mai 2011
[49] A. Ruehli, G. Antonini & L. Jiang, “Circuit Oriented Electromagnetic Modeling Using the PEEC Techniques”, Wiley, Janvier 2017
[50] M. Kamon, M.J. Tsuk & J.K. White, “FASTHENRY: a multipole-accelerated 3-D inductance extraction program”, IEEE Transactions on Microwave Theory and Techniques, Vol. 42, n°. 9, p. 1750-1758, Août 2002
[51] F. Lafon, “Développement de techniques et de methodologies pour la prise en compte des contraintes CEM dans la conception d’équipements du domaine automobile. Etude de l’immunité, du composant à l’équipement”, Rennes, 2011
[52] W.F. Brinkman, D.E. Haggan & W.W. Troutman, “A history of the invention of the transistor and where it will lead us”, IEEE Journal of Solid-State Circuits, Vol. 32, n°. 12, p. 1858-1865, Décembre 1997
162
[53] G. L. Arsov & S. Mirčevski, “The Sixth Decade of the Thyristor”, Electronics, Vol. 14, n°. 1, p. 3-7, Juin 2010
[54] Timothy L. Skvarenina, “The Power Electronics Handbook”, CRC Press, 2002
[55] K. Shenai, “The Invention and Demonstration of the IGBT”, IEEE Power Electronics Magazine, Vol. 2, n°. 2, p. 12-16, Juin 2015
[56] S. Veeraraghavan & J.G. Fossum, “A physical short-channel model for the thin-film SOI MOSFET applicable to device and circuit CAD”, IEEE Transactions on Electron Devices, Vol. 35, n°. 11, p. 1866-1875, Novembre 1988
[57] Huang, Liu, Jeng, Ko & Hu, “A physical model for MOSFET output resistance”, IDEM ’92, Décembre 1922
[58] K.A. Bowman, B.L. Austin, J.C. Eble, X. Tang & J.D. Meindl, “A physical alpha-power law MOSFET model”, 1999 International Symposium on Low Power Electronics and Design, Août 1999
[59] E. Robilliart & E. Dubois, “Physical MOSFET's model for analog circuit design: application to current copier based architectures”, 1996 IEEE International Symposium on Circuits and Systems Connecting the World - ISCAS 96, Vol. 4, p. 731-734, 1996
[60] G. Brocard, “Semi-Conductor Components”, The LTspice IV Simulator – Manual, methods and Applications, 1st ed. Würth Elektronik, 2013, pp. 457-465.
[61] http://www.keysight.com/en/pd-2253443-pn-B1500A-A20/multi-frequency-capacitance-measurement-unit-mfcmu?cc=LB&lc=eng
[62] A. Ruehli, “Partial element equivalent circuit (PEEC) method and its application in the frequency and time domain”, 1996 IEEE International Symposium on Electromagnetic Compatibility, Août 1996
[63] G. Dash, “Know The Theory of Partial Inductance to Control Emissions”
[64] C. Hoer & C. Love, “Exact inductance equations for rectangular conductors with applications to more complicated geometries”, Journal of Research of the National Bureau of Standards, vol. 69, n°. 2, p. 127–137, Juin 1965.
[65] G. Zhong and C.K. Koh, “Exact Closed Form Formula for Partial Mutual Inductances of On-Chip Interconnects”, Proceedings of the 2002 IEEE International Conference on Computer Design, 2002
[66] R.B. Wu, C. N. Kuo & K. K. Chang, “Inductance and resistance computations for threedimensional multiconductor interconnect structures”, IEEE Transanctions on Microwave Theory and Techniques, vol. 40, n°. 2, p.263–270, Février 1992
[67] R.P. Clayton, “Analysis of Multiconductor Transmission Lines”, Manhattan, Wiley, 2008
[68] R.F. Harrington, “Field Computation by Moment Methods”, New York, R. F. Harrington, 1968
[69] N.Tidjani, J.C. Le Bunetel, A. Ouchar & Y. Raingeaud, “Electromagnetic Coupling Modeling of Microstrip Lines Used in Switching Power Supplie”s, Journal of Control Science and Engineering, vol.1, p 55-59, 2013
[70] http://www.ipcindia.org.in/html/technical-corner/2015-05.html
[71] K. Mostefauoui-Kasri, “Caractérisation, modélisation CEM de composants pour applications radars”, Université de ROUEN, 2011
[72] C.L. Holloway & G.A. Hufford, “Internal Inductance and Conductor Loss Associated with the Ground Plane of a Microstrip Line”, IEEE Transactions on Electromagnetic Compatibility, Vol. 39, pp. 73-78, 1997
[73] R. Faraji-Dana & Y.L. Chow, “The current distribution and AC resistance of a microstrip structure”, IEEE Transactions on Microwave Theory and Techniques, Vol. 38, n°. 39, pp 1268-1277, Septembre 1990
163
[74] M. Toure, “Étude comparative de logiciel de simulation – Cas du PCB”, stage à l’université de Blaise Pascal, 2015
[75] K. Price, R. M. Storn & J. A. Lampinen, “Differential Evolution: A Practical Approach to Global Optimization”, Springer Berlin Heidelberg, 2014
[76] B. Revol, “ Modélisation et optimisation des performances CEM d’une association variateur de vitesse – machine asynchrone”, Grenoble, 2003
[77] T. De Oliveira, “ Optimisation du routage d’un filtre CEM”, Grenoble, 2006
[78] https://www.maximintegrated.com/en/app-notes/index.mvp/id/5100
[79] M. Bensetti, “ Développement de modèles pour la conception et le contrôle de dispositifs en génie électrique: Applications aux problèmes de CND et de CEM “ , HDR de l'université Paris-Sud, soutenue en Mars 2014.

164

165
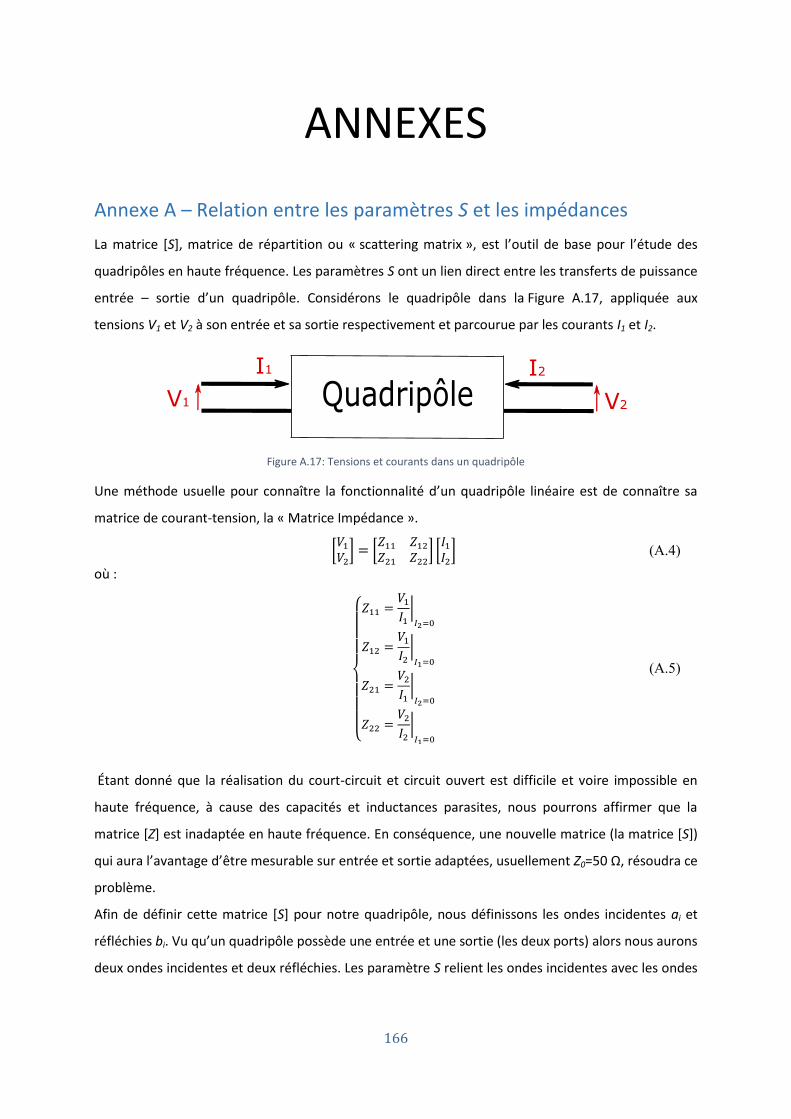
166
ANNEXES
Annexe A – Relation entre les paramètres S et les impédances
La matrice [S], matrice de répartition ou « scattering matrix », est l’outil de base pour l’étude des
quadripôles en haute fréquence. Les paramètres S ont un lien direct entre les transferts de puissance
entrée – sortie d’un quadripôle. Considérons le quadripôle dans la Figure A.17, appliquée aux
tensions V1 et V2 à son entrée et sa sortie respectivement et parcourue par les courants I1 et I2.
Figure A.17: Tensions et courants dans un quadripôle
Une méthode usuelle pour connaître la fonctionnalité d’un quadripôle linéaire est de connaître sa
matrice de courant-tension, la « Matrice Impédance ».
(A.4)
où :
(A.5)
Étant donné que la réalisation du court-circuit et circuit ouvert est difficile et voire impossible en
haute fréquence, à cause des capacités et inductances parasites, nous pourrons affirmer que la
matrice [Z] est inadaptée en haute fréquence. En conséquence, une nouvelle matrice (la matrice [S])
qui aura l’avantage d’être mesurable sur entrée et sortie adaptées, usuellement Z0=50 Ω, résoudra ce
problème.
Afin de définir cette matrice [S] pour notre quadripôle, nous définissons les ondes incidentes ai et
réfléchies bi. Vu qu’un quadripôle possède une entrée et une sortie (les deux ports) alors nous aurons
deux ondes incidentes et deux réfléchies. Les paramètre S relient les ondes incidentes avec les ondes
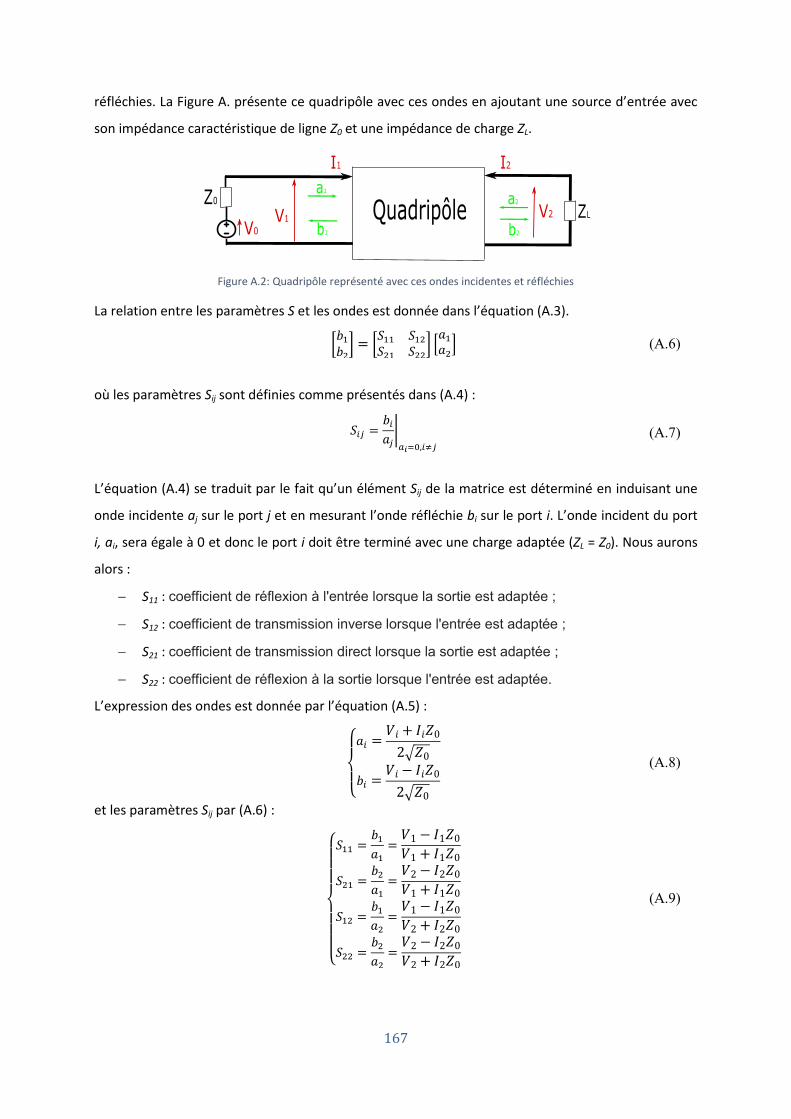
167
réfléchies. La Figure A. présente ce quadripôle avec ces ondes en ajoutant une source d’entrée avec
son impédance caractéristique de ligne Z0 et une impédance de charge ZL.
Figure A.2: Quadripôle représenté avec ces ondes incidentes et réfléchies
La relation entre les paramètres S et les ondes est donnée dans l’équation (A.3).
(A.6)
où les paramètres Sij sont définies comme présentés dans (A.4) :
(A.7)
L’équation (A.4) se traduit par le fait qu’un élément Sij de la matrice est déterminé en induisant une
onde incidente aj sur le port j et en mesurant l’onde réfléchie bi sur le port i. L’onde incident du port
i, ai, sera égale à 0 et donc le port i doit être terminé avec une charge adaptée (ZL = Z0). Nous aurons
alors :
S11 : coefficient de réflexion à l'entrée lorsque la sortie est adaptée ;
S12 : coefficient de transmission inverse lorsque l'entrée est adaptée ;
S21 : coefficient de transmission direct lorsque la sortie est adaptée ;
S22 : coefficient de réflexion à la sortie lorsque l'entrée est adaptée.
L’expression des ondes est donnée par l’équation (A.5) :
(A.8)
et les paramètres Sij par (A.6) :
(A.9)
168
Traitons les cas du I.2.2.1 afin de pouvoir trouver la relation entre les paramètres S et l’impédance Z
du composant à mesurer. Pour le cas de la mesure du coefficient de réflexion S11, en comparant la
Figure 1.23 et la Figure A., on pourra en déduire :
(A.10)
Avec les déductions de (A.7), l’expression de S11 sera présentée dans (A.8).
(A.11)
Pour le cas de la mesure du coefficient de réflexion S21 – composant série, en comparant la Figure
1.24 et la Figure A., on pourra en déduire :
(A.12)
Avec les déductions de (A.9), l’expression de S11 sera présentée dans (A.10).
(A.13)
Pour le cas de la mesure du coefficient de réflexion S21 – composant parallèle, en considérant les
relations de (A.2), nous pourrons en déduire :
(A.14)
D’autre part, une relation entre les paramètres Sij et Zij existent.
(A.15)
En utilisant les relations (A.11) et (A.12), nous trouvons la relation entre S21 et Z.
(A.16)

169
170
ANNEXE B : Algorithme d’évolution différentielle dédiée à la
caractérisation des modèles des composants passifs
B.1. Algorithme d’évolution différentielle
Cet algorithme cherche à minimiser une fonction f(x) sous les contraintes g(x)≤0 où x est en général
un vecteur. Introduisons tout d’abord quelques éléments de vocabulaire :
Population : Une population est constituée d’individu xi
Chromosome : Le composant du vecteur x
Nous faisons évoluer une population initiale par sélection des individus, croisements et mutation. A
chaque itération de la méthode, nous effectuons les opérations suivantes :
Evaluation et tri. Soient X=xi et f(X)=f(xi) une population et son image. On associe à chaque
individu xi son coût f(xi) puis on trie ensuite cette population en terme de coût croissant.
Sélection. On sélectionne les individus ayant le coût le plus faible. Ce sont les premiers
individus de la génération suivante.
Croisement. A partir de la sélection précédente, on détermine une seconde partie de la
nouvelle génération par croisement entre individus. Le croisement s’effectue à partir de 2
individus ou plus choisis au hasard dans la sélection. A l’aide d’une règle mathématique, on
croise ces individus pour produire un ou plusieurs descendants.
Mutation. On applique une règle mathématique sur des individus de la sélection. On
introduit alors une mutation sur un ou plusieurs de ses chromosomes. On engendre ainsi la
dernière partie des individus de la génération suivante.
En général, les règles mathématiques appliqués sont basées sur des processus stochastiques.
Les paramètres les plus importants sont les suivants :
La probabilité du croisement
La probabilité d’une mutation
Le nombre de points de croisement dans un individu
Le nombre maximal d’itérations de l’algorithme
Le critère d’arrêt
Le nombre d’individu dans une génération
Un chromosome est une série de gènes et décrit une certaine qualité du sujet. La probabilité du
croisement pc pour les algorithmes génétiques standard est entre 0.6 et 1. Les points du croisement
sont placés d’une façon aléatoire parmi les gènes du chromosome.
171
La probabilité de la mutation pm est la probabilité que la valeur d’un gène change. La mutation peut
être exécutée sur tous les gènes de tous les chromosomes de la génération sans exception. La
probabilité de cette mutation est moins que 0.1 pour les algorithmes génétiques standards.
Les chromosomes peuvent croiser pour plusieurs gènes. Pour un chromosome, au moins un
croisement va être effectué, mais on pourra exécuter plusieurs et surtout si le chromosome est long.
Le nombre maximal d’itérations est le paramètre qui détermine le nombre de génération pour lequel
l’algorithme va être exécuter. Il est possible que l’algorithme demande un nombre d’itérations infini
(générations) pour générer la solution optimale, donc il est essentiel de mettre un critère d’arrêt
automatique dans un cas pareil.
Le nombre d’individus dans une génération dépend du nombre des optimums locaux. Dans le cas où
on ne pourra pas prédire le nombre d’optimum locaux, il faudra choisir un nombre d’individus dans
une génération élevé mais cela augmente le temps de simulation de l’algorithme. Un compromis
entre le nombre d’individu et la précision des résultats est à faire.
B.2 Application aux modèles de composants passifs
Comme défini dans le paragraphe précédent, il faudra définir un individu pour l’algorithme. Pour la
détermination du modèle équivalent du composant passif, l’individu sera un vecteur comportant les
valeurs des éléments qui constituent le modèle. La fonction objectif sera l’erreur quadratique
relative entre le module de l’impédance de l’individu et l’impédance mesurée :
(B.1)
En minimisant cette erreur, la solution optimale de l’algorithme sera les valeurs des éléments du
modèle qui nous donne une impédance la plus proche possible de la mesure. La fonction objectif
dans ce cas est basée sur l’impédance mais la mesure peut nous donner aussi la phase du composant
qui pourra être utile pour la détermination du modèle.
La phase pourra être un facteur aussi dans la fonction objectif mais son rôle est plus important dans
la détermination du modèle. L’algorithme génétique détermine les valeurs des éléments du
composant passif concerné mais la structure du modèle est déjà prédéfinie. La phase mesurée du
composant pourra nous aider à déterminer cette structure quand le modèle est un peu compliqué.
Une phase de +90° dans une plage de fréquence indique qu’il y a une dominance d’inductance dans
cette plage tandis qu’une phase de -90° indique la dominance capacitive. Un changement entre 90°
et -90° oblige la phase à passer par 0 et ce qui indiquera une résonnance. Une analyse de la phase
aidera à déterminer la structure du modèle et l’algorithme détermine les valeurs des éléments du
modèle.

172

173
Titre : Contribution aux modèles des perturbations électromagnétiques émises par les convertisseurs
de l’électronique de puissance
Mots clés : CEM, émissions conduites, modélisation, électronique de puissance
Résumé : Avec l'électrification des moyens de
transports, en particulier dans les applications
avions et l’automobile, la consommation
électrique est en pleine croissance. Cela conduit
à de nouveaux problèmes dans la phase de
conception. Même si le développement en
électronique de puissance permet d’avoir une
meilleure gestion d’énergie, avoir un meilleur
rendement et avoir une réduction de prix, cela
génère des niveaux d’interférences
électromagnétiques élevées. L’intégration de
l’étude de la CEM dès la phase de conception
pourra aider à prédire le profil des émissions
conduites avant de passer au prototypage et
donc éviter de perdre du temps et du coût de
conception.
Dans ce contexte, nous avons mis en évidence
le besoin de la modélisation de nos composants
d’un point de vue CEM. Ces modèles doivent
être valable dans une plage de fréquence définit
par la norme CISPR 25 dédiée au secteur
automobile. L’approche de la modélisation doit
être applicable sur tous les types de composants
utilisés dans ce domaine tout en étant
indépendants des fournisseurs qui ne donnent
pas toutes les caractéristiques des composants
qu’ils vendent ni des logiciels commercialisés
qui aident à fournir des modèles de nos
composants. Les travaux effectués pourraient se
diviser en plusieurs étapes : la modélisation des
composants passifs, la modélisation des
composants actifs, la modélisation du PCB et
l’optimisation du routage.
Title : Contribution to the models of electromagnetic perturbations emitted by power electronics
converters
Keywords : EMC, conducted emissions, modeling, power electronics
Abstract : With the electrification of the
transportation means, especially in avionics
and automotive applications, power
consumption is growing. This leads to new
problems in the design phase. Even though the
development in power electronics allows for
better energy management, better performance
and lower prices, it generates high levels of
electromagnetic interference. Integrating the
EMC study early in the design phase can help
predict the profile of emissions conducted prior
to prototyping and thus avoid wasting time and
cost of design.
In this context, we have highlighted the need
for modeling our components from an EMC
point of view. These models must be valid in a
frequency range defined by the CISPR 25
standard dedicated to the automotive sector.
The modeling approach should be applicable to
all types of components used in this area while
being independent of suppliers that do not
provide all the features of the components they
sell, or commercial software that helps provide
models of our components. The work could be
divided into several stages: passive component
modeling, active component modeling, PCB
modeling and routing optimization.