contraintes deformations
DESCRIPTION
CONTRAINTES DEFORMATIONSTRANSCRIPT
Mécanique des Milieux Mécanique des Milieux ContinusContinus
I Milieux DéformablesII Forces de ContactIII Contraintes IV Loi Fondamentale de la DynamiqueV DéformationsVI Relation Contraintes - Déformation
J.C. Charmet © 2002

II Milieux Déformables Milieux Déformables
I-1 Forces Externes et Équilibre MécaniqueI-2 Comportement d’une StructureI-3 Raideur et Rigidité

I-1I-1 Forces Externes : Forces Externes : Équilibre MécaniqueÉquilibre Mécanique
FF
0
FÉquilibre des Forces
0
MÉquilibre des Moments
F
l
F
F
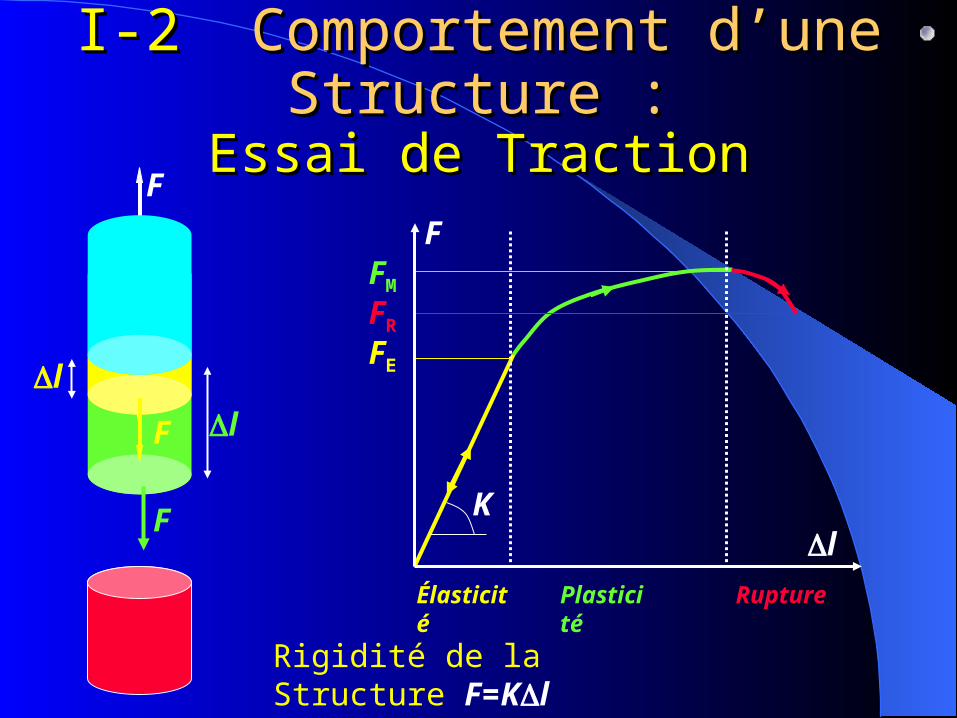
I-2I-2 Comportement d’une Structure : Comportement d’une Structure :Essai de TractionEssai de Traction
FR
FM
Élasticité Plasticité Rupture
FE
F
l
l
F
Rigidité de la Structure F=Kl
K

I-3I-3 Raideur et Rigidité : Raideur et Rigidité : Géométrie de la Structure et Comportement du MatériauGéométrie de la Structure et Comportement du Matériau
Rigidité de la Structure F=Kl
F ~ S <= Expérience
SK ~
lK
1~
F
l
l
l
F1
F2
l
F1 F2
S2l S1
F
l2F
l1
Sl2
l1 S
l
lE
S
F
l1
l1
l2
l2
Acier
Plastique
Raideur du Matériau
Contrainte Déformation
=> l ~ l
IIII Forces de Contact Forces de Contact
II-1 Forces Internes : Action et RéactionII-2 Forces Internes : Répartition HomogèneII-3 Forces Internes : Répartition non HomogèneII-4 Vecteur Contrainte : État Local
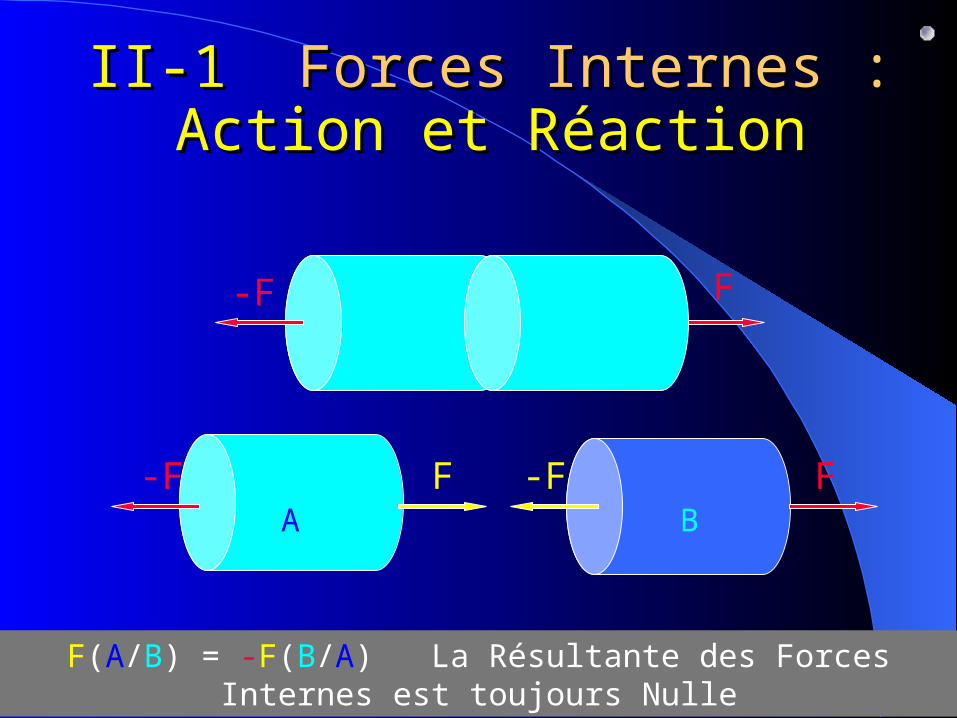
II-1II-1 Forces Internes : Forces Internes :Action et RéactionAction et Réaction
-FF-F F
F-F
A B
F(A/B) = -F(B/A) La Résultante des Forces Internes est toujours Nulle

II-2II-2 Forces Internes : Forces Internes :Répartition HomogèneRépartition Homogène
Le Vecteur Contrainte T Force par unité de Surface [MPa]
est indépendant du point dans la section S
TF F
S
FT
F

II-3II-3 Forces Internes : Forces Internes : Répartition non HomogèneRépartition non Homogène
Le Vecteur Contrainte T dépenddu point M dans la section S
TF F
S
dSMTF )( M

II-4II-4 Vecteur Contrainte : Vecteur Contrainte : État localÉtat local
T dépend : du point M dans la section S : de l’orientation n de la section S
T
F F
S
dSnMTF ),(
M
TF
M
n
n
Fn

IIIIII Contraintes Contraintes
III-1 Tenseur des ContraintesIII-2 Représentation des Contraintes

III-1III-1 Tenseur des Contraintes Tenseur des Contraintes
III-1.1 Repère local : Traction, CisaillementIII-1.2 Tenseur des Contraintes : DéfinitionIII-1.3 Tenseur des Contraintes : SymétrieIII-1.4 Contraintes Principales et Axes PropresIII-1.5 Sollicitations PrincipalesIII-1.6 Invariants du Tenseur des ContraintesIII-1.7 Sphérique et Déviateur des Contraintes

III-1.1 Tenseur des Contraintes : Tenseur des Contraintes :Repère LocalRepère Local
T(M,n)T
Mnn
rn
n, r, T coplanaires
r
n
t
nn = T n Traction > 0 Compression <0
rn = T r Cisaillement
Trièdre local direct n, r, t
tn = T t = 0
Facette de centre Facette de centre MM et et de normale de normale nn

x3
x2
x1
x3
x2
III-1.2 Tenseur des Contraintes : Tenseur des Contraintes : Équilibre local des ForcesÉquilibre local des Forces
dS1
x1T1
x1
x2
x3T3
x3
x1
x2
T2
-T2
-T3
T(n)
n-T1
dS2
dS3
dS
332211)( dSTdSTdSTdSnT
3
2
1
333231
232221
131211
321
)(
n
n
n
nT
nTTT
nMnMT
)(),(
Ti=ijnj

x3
x2
x1
dx1
dx3
dx2
III-1.3 Tenseur des Contraintes : Tenseur des Contraintes : Équilibre local des MomentsÉquilibre local des Moments
23
3231
21
13
12
21 dx2 dx3 dx1= 12 dx3 dx1 dx2
31 dx3 dx2 dx1= 13 dx2 dx1 dx3
32 dx3 dx1 dx2= 23 dx1 dx2 dx3
11 12 13
21 22 23
31 32 33
ij =ji
Le Tenseur des Contraintes est Symétrique
)(M

MN
T
M
III-1.4 Tenseur des Contraintes : Tenseur des Contraintes : Contraintes Principales et Axes PropresContraintes Principales et Axes Propres
I
II
III
X3
X2
X1
x3
x2
x1
n
t
)(M 11 12 13
21 22 23
31 32 33
)(M
nt
NT
A
tAT
nA NAA t
N
tAT
NAn t
AMAM t)()( il = aij jk akl

III-1.5 Tenseur des Contraintes : Tenseur des Contraintes : Sollicitations Principales Traction - CompressionSollicitations Principales Traction - Compression
TriaxialeUniaxiale 1
2
3
Biaxiale 1
2
1 =2 =
1 =2 = 3 = -p
Hydrostatique
p
-p
-p
-p
1
1
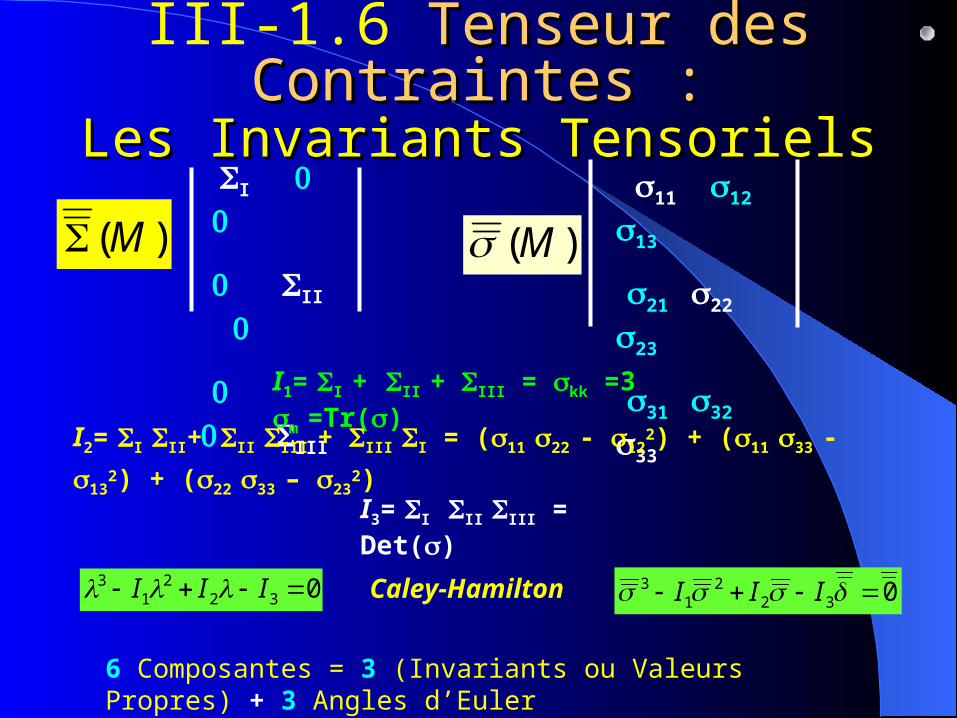
III-1.6 Tenseur des Contraintes : Tenseur des Contraintes : Les Invariants TensorielsLes Invariants Tensoriels
I
II
III
)(M )(M 11 12 13
21 22 23
31 32 33
I1= I + II + III = kk =3 m =Tr()
I2= I II+ II III + III I = (11 22 - 122) + (11 33 - 13
2) + (22 33 – 232)
I3= I II III = Det()
0322
13 III 032
21
3 IIICaley-Hamilton
6 Composantes = 3 (Invariants ou Valeurs Propres) + 3 Angles d’Euler

III-1.7 Tenseur des Contraintes : Tenseur des Contraintes : Sphérique et DéviateurSphérique et Déviateur
m
m
m
Sphérique S Tr(S)= Tr()
dmDSM )(
6 Composantes = m + d + µ +3 Angles d’Euler
11- m 12 13
21 22 - m 23
31 32 33 - m
+
Déviateur D Tr(D)= 0
m Contrainte Normale Moyenne (Traction ou Compression)
)(Tr3
1 m
1
m
DSM )(
+d
)DTr(3
1 22 d
d Contrainte Déviatorique Moyenne (Cisaillement)
(µ)
(µ)
(µ)
Tenseur des Directions Tr()=0 et Tr()=3

III-2III-2 Représentation des Contraintes Représentation des Contraintes
III-2.1 Contraintes OctaédriquesIII-2.2 Espace des ContraintesIII-2.3 Critères de Plasticité et de RuptureIII-2.4 Ellipsoïde des ContraintesIII-2.5 Cercle de Mohr PrincipalIII-2.6 Cercles de Mohr III-2.7 Cisaillement Simple

nn
III-2.1 Représentation des Contraintes : Représentation des Contraintes : Contraintes OctaédriquesContraintes Octaédriques
DSM )(
m Contrainte Normale Moyenne (Traction ou Compression)
Sphérique S Tr(S)= Tr()
)(Tr3
1Sm
1
m
Déviateur D Tr(D)= 0
)DTr(3
1 22 d
D
D
D
+
d Contrainte Déviatorique Moyenne (Cisaillement)
x1
x2
x3
m
T
r
1
1
1
3
1
n
n
nn = mmnn DSnDnnSnTn )(Tr3
1)(Tr
3
1
2222222 )()(2)()( mmnnnr nDnnDSnnSnnDSnTT
2222 )(Tr3
1)(Tr2)(Tr
3
1dmm DDS
nr = d
nrd

I
II
III
O
0 MHHO
)(M 1
2
3
III-2.2 Représentation des Contraintes : Représentation des Contraintes : Espace des ContraintesEspace des Contraintes
2
1
3
M
1
1
1
3
1
3
2
1
MO
DSM )(
=
+
HSphérique
Déviateur
d
m
m
m
MH
3
2
1
)(Tr 22
DMH
3m
m
m
m
HO
)(Tr 22
SHO
3

3P
Limite Plastique enCisaillement P sur
Limite de Rupture R
en Traction sur R
II
I
III
O
III-2.3 Représentation des Contraintes : Représentation des Contraintes : Critères de Plasticité et de RuptureCritères de Plasticité et de Rupture
1
d3
d3
R
Point R 1 (R) = R et d (R) < P
d (P) = P et 1 (P) < R
M(M)
P
Point P

III-2.4 Représentation des Contraintes : Représentation des Contraintes : Ellipsoïde des ContraintesEllipsoïde des Contraintes
1T1
2
T2
T3
3
1
2
3
n1
n2
n3
T1
T2 =T3
12
3
3
2
2
2
2
1
1
TTT
n T
n
n
Tn
Lorsque n appartient à un plan principal, T appartient au même plan

r
t
Facette de normale x2
x3
x1
x2
r
n
t
r
n
t
III-2.5 Représentation des Contraintes : Représentation des Contraintes : Cercle de Mohr PrincipalCercle de Mohr Principal
1
2
3
)(MFacette de normale x1
x1
x2
x3
T nn= 1
nr= 0
T nn= 2
nr= 0
1
x1
2
x2
C
R
T
nr
nn
nn
nr
n
nn = T n = n n = OC+Rcos2nr = T r = n r = -Rsin2
R=
OC=
221
221
Facette de normale nx3
x1
x2
n
T
Facettes contenant la direction principale x3
de normale au plan x1 x2
O
nr
nn

Facette dont la normale n appartient à un plan principal (x1 x2)
III-2.6 Représentation des Contraintes : Représentation des Contraintes : Cercles de MohrCercles de Mohr
tr
n
1
2
3
)(Mx1
x2
x3
nn
nr
3 12
Tnr
nn
Facette dont la normale n n’appartient pas à un plan principalx2
x3
n
t
rx1
nn
nr
1
3 2nr nn
T
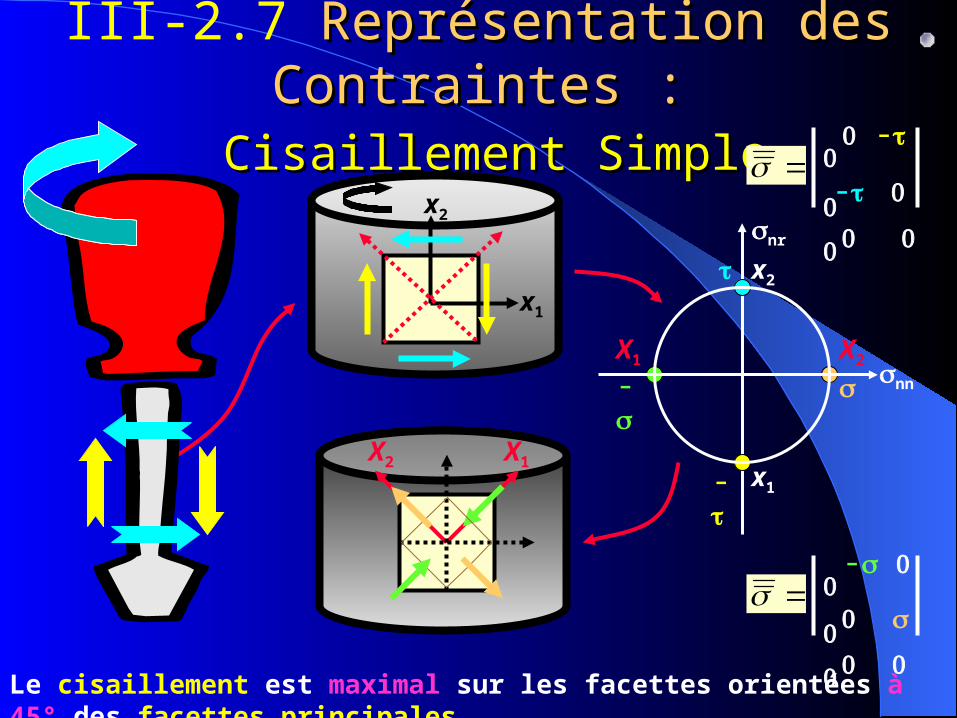
III-2.7 Représentation des Contraintes : Représentation des Contraintes : Cisaillement SimpleCisaillement Simple
X1X2
x1
x2
-
-
Le cisaillement est maximal sur les facettes orientées à 45° des facettes principales
-
X1
-X2
nr
nn
x1-
x2

IVIV Loi Fondamentale de la Loi Fondamentale de la DynamiqueDynamique
IV-1 Conditions aux Limites IV-2 Bilan des Forces : Équilibre Dynamique IV-2 Équation de l’Équilibre Dynamique IV-3 Exemple : Prisme pesant IV-4 Application : Optimisation en Compression

IV-1IV-1 Loi Fondamentale de la Dynamique : Loi Fondamentale de la Dynamique : Conditions aux LimitesConditions aux Limites
Au Point M de la Surface : n Normale Extérieure f Force Extérieure Appliquée (/ unité de surface)
Mf
nx3
x1
x2
x1
)()( MfnM
f1
f2 f3
11 12 13
21 22 23
31 32 33
00
1
= =>
11 12 f1
21 22 f2
f1 f2 f3
La normale n à une surface libre de charge est direction principale à valeur propre = 0
0f = 0 0
=>
11 12 0
21 22 0
0 0 0
f
n
11
12
x222
21
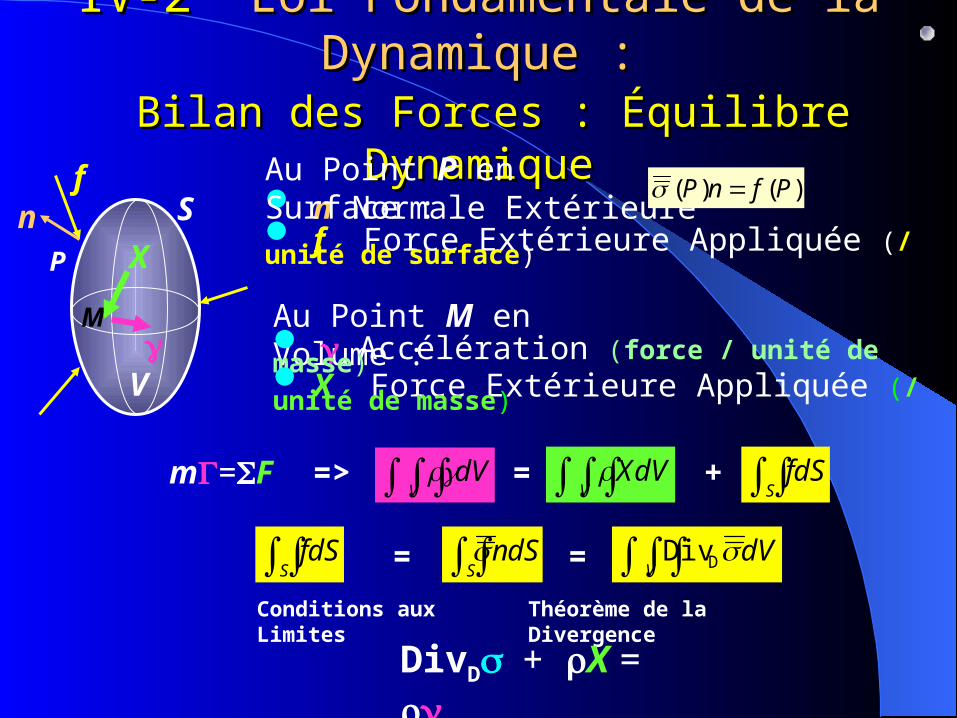
IV-2IV-2 Loi Fondamentale de la Dynamique : Loi Fondamentale de la Dynamique : Bilan des Forces : Équilibre DynamiqueBilan des Forces : Équilibre Dynamique
n Normale Extérieure f Force Extérieure Appliquée (/ unité de surface)
Au Point M en Volume : M Accélération (force / unité de masse) X Force Extérieure Appliquée (/ unité de masse)
X
Au Point P en Surface :
P
fn
V
S)()( PfnP
m=F => dVV
= +dVX
V
S dSf
S dSnS dSf
= dV
V DDiv=
Conditions aux Limites Théorème de la Divergence
DivD+ X =

IV-3IV-3 Loi Fondamentale de la Dynamique : Loi Fondamentale de la Dynamique : Équilibre Dynamique : Équilibre Dynamique : DivD
dx3dx1
x2
x1
x3
dx2
m=F projection des Forces sur l’axe x1
11 11+ dx111
x1
+(11+ dx111
x1
- 11) dx2 dx3
13
13+ dx313
x3 +( - 13) dx1 dx213+ dx3
13
x312
12+ dx212
x2
+( - 12) dx1 dx312+ dx2
12
x2
1 dx1 dx2 dx3
1
X1 dx1 dx2 dx3=
X1
11
x1
12
x2
13
x3+ + =+X1 1
DivD =
11
x1
12
x2
13
x3+ +
21
x1
22
x2
23
x3+ +
31
x1
32
x2
33
x3+ +
DivD+ X = ij
xj+ =Xi i
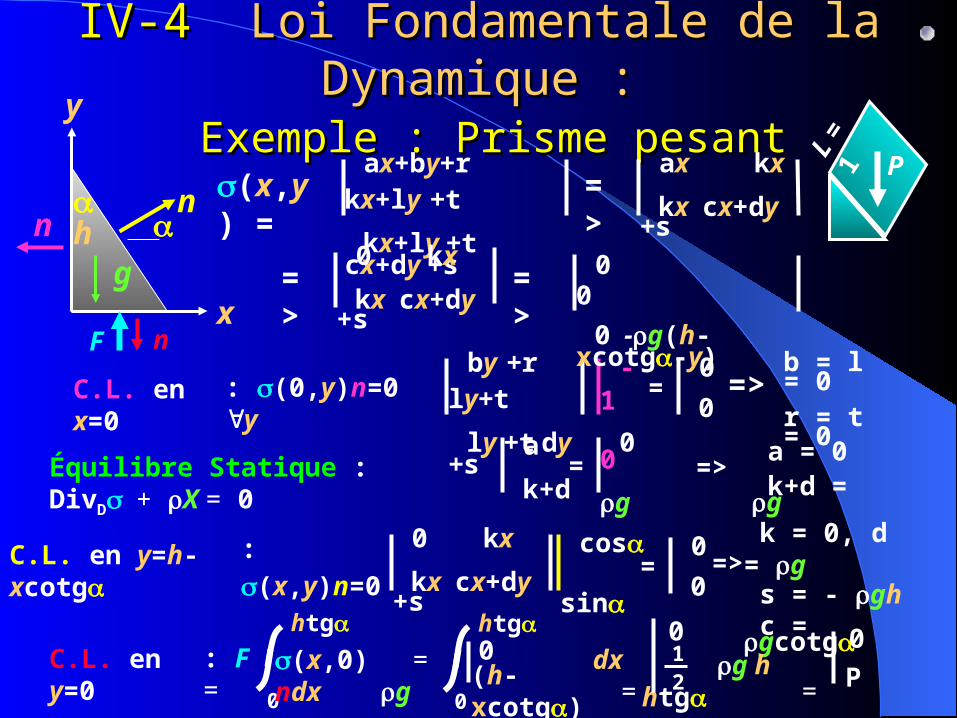
IV-4IV-4 Loi Fondamentale de la Dynamique : Loi Fondamentale de la Dynamique : Exemple : Prisme pesantExemple : Prisme pesant
: (x,y)n=0
ax+by+r kx+ly +t
kx+ly +t cx+dy +s
(x,y ) =
x
y
g
hn
C.L. en x=0 by +r ly+t
ly +t dy +s
-1
0=
0
0
n
C.L. en y=h-xcotg cos
sin=
0
0
ax kx
kx cx+dy +s=>
Équilibre Statique : DivD+ X = 0
a
k+d
0
g= a = 0
k+d = g =>
0 kx
kx cx+dy +s=> 0 0
0 -g(h-xcotg-y)
=>
0 kx
kx cx+dy +s
k = 0, d = g s = - gh c = gcotg
=>
C.L. en y=0
F
: (0,y)n=0 yb = l = 0r = t = 0=>
P
L =
1
= g
0
htg
(h-xcotg) dx0
P
0 = g h htg 1
2
0 =: F =
0
htg
(x,0)ndx
n
P
P = ghl
l
h
1
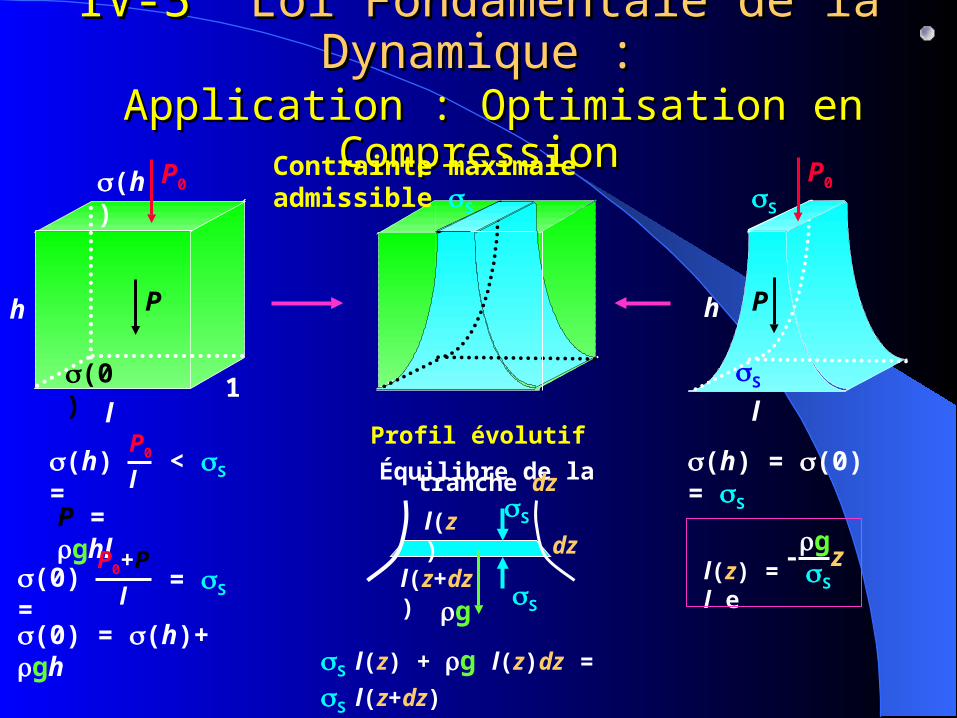
IV-5IV-5 Loi Fondamentale de la Dynamique : Loi Fondamentale de la Dynamique : Application : Optimisation en CompressionApplication : Optimisation en Compression
Profil évolutif
S
S
P0(h)
(h) =P0
l
(0)
(0) =P0+P
l
< S
(0) = (h)+ gh
Contrainte maximale admissible S
= S
S l(z) + g l(z)dz = S l(z+dz)
P0
P
l
h
S
S
(h) = (0) = S
l(z) = l egS
z-l(z+dz)
dzl(z)
g
Équilibre de la tranche dz

VV Déformations Déformations
V-1 ‘Ut Tensio sic Vis’V-2 Tenseur des DéformationsV-3 Représentation des Déformations

V-1V-1 ‘Ut Tensio sic Vis’ ‘Ut Tensio sic Vis’
V-1.1 Robert Hooke V-1.2 Translation, Rotation et Déformation V-1.3 Conservation de la Masse V-1.4 Champ de déplacement V-1.5 Exemple : le Glissement Simple V-1.6 Les Grandes Déformations V-1.7 Petites Déformations et Superposition V-1.8 Séparer Rotation et Déformation V-1.9 Continuité et Compatibilité des Déformations

V-1.1V-1.1 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Robert Hooke
l
Pour supporter un chargement un milieu matériel doit se déformer
A l’échelle macroscopique
l+l
A l’échelle microscopique
Extension l
lGlissement
l+l
l
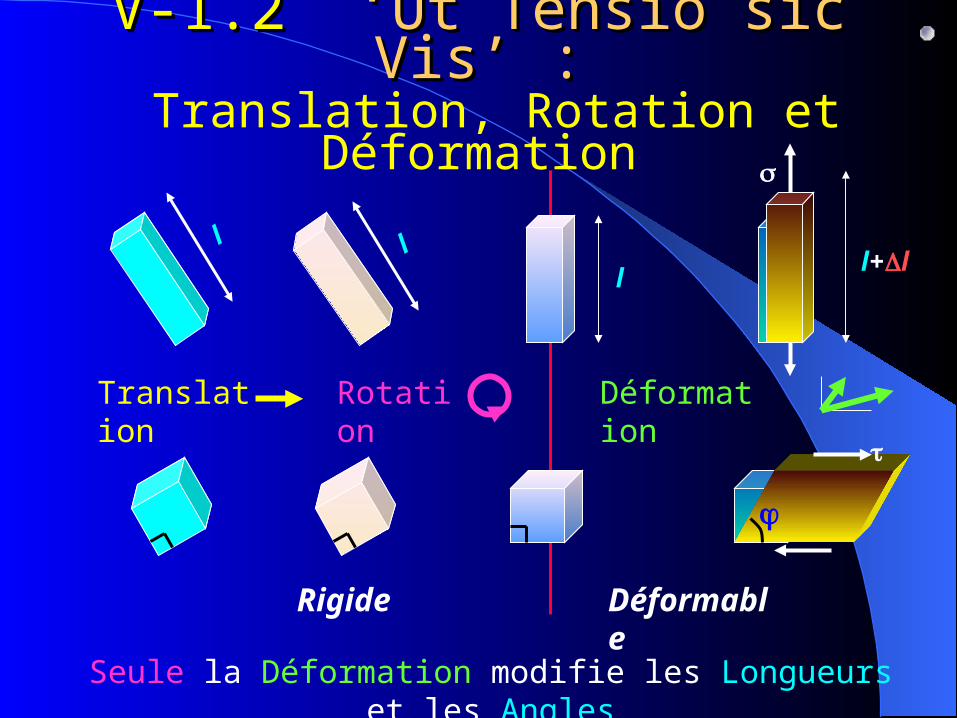
V-1.2V-1.2 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Translation, Rotation et Déformation
Seule la Déformation modifie les Longueurs et les Angles
Rigide Déformable
l
Translation
l
Rotation
l
Déformation
l+l

V-1.3V-1.3 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Conservation de la Masse
dvdV
x = F (X)
xX
Xx
dX
dx
dx = GradF(X) dX = dX
=
x1
X1
x1
X2
x1
X3
x2
X1
x2
X2
x2
X3x3
X1
x3
X2
x3
X3
=
dvdV
m m m = dV = dv
=

V-1.4V-1.4 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Champ de Déplacement
dX
dx
Xx
dx = dXx = F (X)
X x
u(X)
u(X+dX)
u u = x - X
du
= ( - ) = (X) Gdu dX dX
=
u1
X1
u1
X2
u1
X3
u2
X1
u2
X2
u2
X3u3
X1
u3
X2
u3
X3
G
Tenseur Gradient de Déplacement
u(X+dX) = u(X) + (X)G dX
Translation + Rotation Déformation

V-1.5V-1.5 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Exemple : Glissement Simple
x
y
=1
= G+ +=1
X
X =X00
x = X
u = G X
x
x =X00
=000
u
Y
Y =0Y0
y
y =YY0
=Y00
u
u
u

V-1.6V-1.6 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Les Grandes Déformations
x
y
1 2 30
1
2
3 =½ 1
00
2G
1=
0 0
½
G
G 1
G 2
G = +½ 1
½
=
Les Grandes Déformations ne sont pas Additives
=( ) G+ x = X X xX
1=
0 0
½
G =½ 1
00
2G

V-1.6V-1.6 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Petites Déformations et SuperpositionPetites Déformations et Superposition
Principe de Superposition : les Petites Déformations sont Additives
=( ) +G’’ x = ’’x’ x’ =( ) + G’ G’’+ ( )X = X X+(G’’ G’+ +G’’G’)
+=( ) G’ x’ = ’X X
Xx’ x
+=( )G’’ x = ’’x’ x’
u’ = G’X
u’u’’
u’’ = G’’x’
=( ) G+ x = X X
u
u = G X
G G’’ + G’ + G’’G’==>
G G’’ + G’Gij < 1% =>
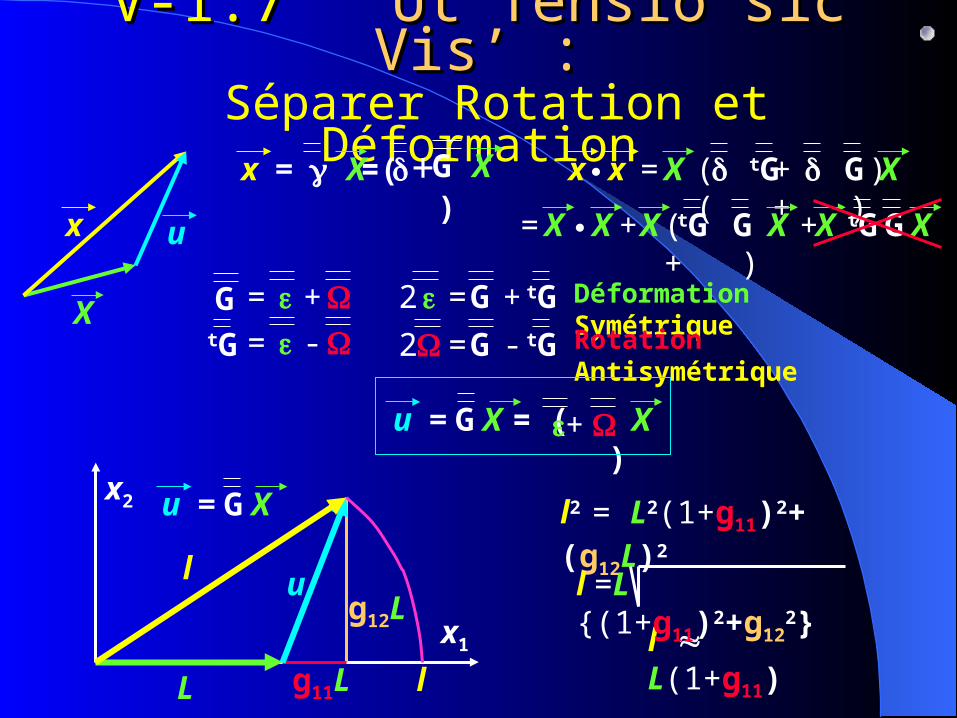
V-1.7V-1.7 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Séparer Rotation et Déformation
x1
x2
X
x
+=( ) G x = X X x x = X ( + )( + )GtG X
= X( + )tG G X X X GtG X X++
g11L
g12L
L
u
u = G X
l
l2 = L2(1+g11)2+(g12L)2
l L(1+g11)
G = +tG = -
tG Déformation Symétrique=2 G +Rotation Antisymétrique=2 G - tG
u
X u = G X = ( )+
l =L {(1+g11)2+g122}
l

V-1.8V-1.8 ‘Ut Tensio sic Vis’ : ‘Ut Tensio sic Vis’ : Continuité et Compatibilité des Déformations
=>
soit RotD = 0G
= ( ) dX du = G dX +
Continuité => du intégrable
Vecteur tourbillon dX = dX=RotD -RotD =tGrad RotG = Grad =>
d = Grad dX intégrable si RotD(Grad ) = 0
Inc( )= RotD(RotG ) = RotG(RotD ) = 0
[Inc( )]rl= rmilkj = 0 km
ij
xx 2
Avec DivDInc()=0

V-2V-2 Tenseur des Déformations Tenseur des Déformations
V-2.1 Repère local : Extension, DistorsionV-2.2 Tenseur des Déformations : DéfinitionV-2.3 Déformations Principales et Axes PropresV-2.4 Invariants du Tenseur des DéformationsV-2.5 Sphérique et Déviateur des DéformationsV-2.6 Changement de Volume et de Forme

V-2.1 Tenseur des Déformations : Tenseur des Déformations : Repère local
ll
rl
l, r, u coplanaires
r
t
ll = u l Extension > 0 Contraction < 0
rl = u r Distorsion
Trièdre local direct l, r, t
tl = u t = 0
M
l
Au point Au point MM segment segment unitaire direction unitaire direction ll
u(M,l)(M,l ) =u l(M)

V-2.2 Tenseur des Déformations : Tenseur des Déformations : DéfinitionDéfinition
332211)( lulululu
3
2
1
333231
232221
131211
321
)(
l
l
l
lu
luuu
(M,l ) =u l(M)
Le Tenseur des Déformations est Symétrique
u1
x2ij =ji
x1
u(l)
l2
l1
l3
l
x1
x3
x2M
u2
u3
u1l1
l1u2l2
l2
u3l3
l3
1
1
1

ML
U
V-2.3 Tenseur des Déformations : Tenseur des Déformations : Déformations Principales et Axes PropresDéformations Principales et Axes Propres
I
II
III
X3
X2
X1
x3
x2
x1
u
)(M 11 12 13
21 22 23
31 32 33
)(M
lu
LU
A
uAU
lA
LAA t
L
uAU
LAl t
AMAM t)()( il = aij jk akl
lM

V-2.4 Tenseur des Déformations : Tenseur des Déformations : Les Invariants TensorielsLes Invariants Tensoriels I
II
III
)(M )(M 11 12 13
21 22 23
31 32 33
I1= I + II + III = kk =3 m =Tr()
I2= I II+ II III + III I = (11 22 - 122) + (11 33 - 13
2) + (22 33 – 232)
I3= I II III = Det()
0322
13 III 032
21
3 IIICaley-Hamilton
6 Composantes = 3 (Invariants ou Valeurs Propres) + 3 Angles d’Euler

V-2.5 Tenseur des Déformations : Tenseur des Déformations : Sphérique et DéviateurSphérique et Déviateur
m
m
m
Sphérique S Tr(S)= Tr()
dmDSM )(
6 Composantes = m + d + µ +3 Angles d’Euler
11- m 12 13
21 22 - m 23
31 32 33 - m
+
Déviateur D Tr(D)= 0
m Déformation Normale Moyenne (Extension ou Contraction)
)(Tr3
1 m
1
m
DSM )(
+ d
)DTr(3
1 22 d
d Déformation Déviatorique Moyenne (Distorsion)
(µ)
(µ)
(µ)
Tenseur des Directions Tr()=0 et Tr()=3

1dx1
2dx2
3dx3
dx1
dx3
dx2
dV= dx1 dx2 dx3
V-2.6 Tenseur des Déformations : Tenseur des Déformations : Changement de Volume et de FormeChangement de Volume et de Forme
x1
x2
x3
1
2
3
dv=(1+1) dx1 (1+2)dx2 (1+3)dx3
dv
dVdv
Changement de Volume
à Forme Constante
Changement de Forme
à Volume Constant
Sphérique S Déviateur D
Variation Relative de Volumedv- dV
dV = 1 + 2 + 3 = Tr() = Div u

V-3V-3 Représentation des Déformations Représentation des Déformations
V-3.1 Déformations OctaédriquesV-3.2 Ellipsoïde des DéformationsV-3.3 Cercle de Mohr PrincipalV-3.4 Cercle de Mohr et DéformationV-3.5 Cercles de Mohr V-3.6 Glissement Pur et Glissement Simple
ll
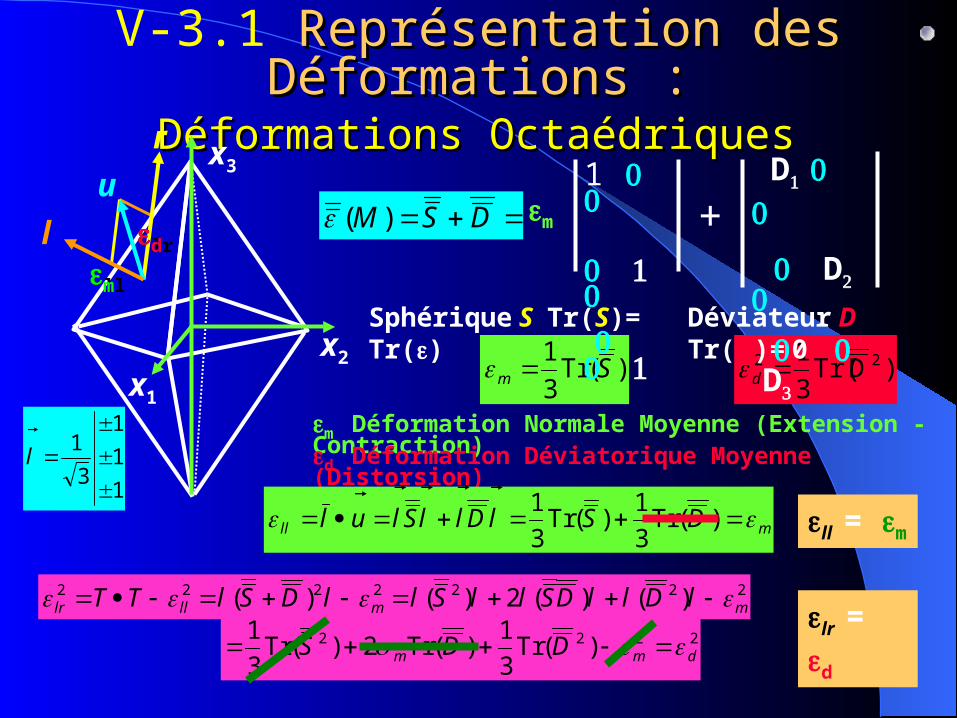
V-3.1 Représentation des Déformations : Représentation des Déformations : Déformations OctaédriquesDéformations Octaédriques
DSM )(
)(Tr3
1Sm
m Déformation Normale Moyenne (Extension - Contraction)
Sphérique S Tr(S)= Tr()
1
m
)DTr(3
1 22 d
Déviateur D Tr(D)= 0
D
D
D
+
d Déformation Déviatorique Moyenne (Distorsion)
x1
x2
x3
m
u
r
1
1
1
3
1
l
l
ll = mmll DSlDllSlul )(Tr3
1)(Tr
3
1
2222222 )()(2)()( mmlllr lDllDSllSllDSlTT
2222 )(Tr3
1)(Tr2)(Tr
3
1dmm DDS
lr = d
lrd
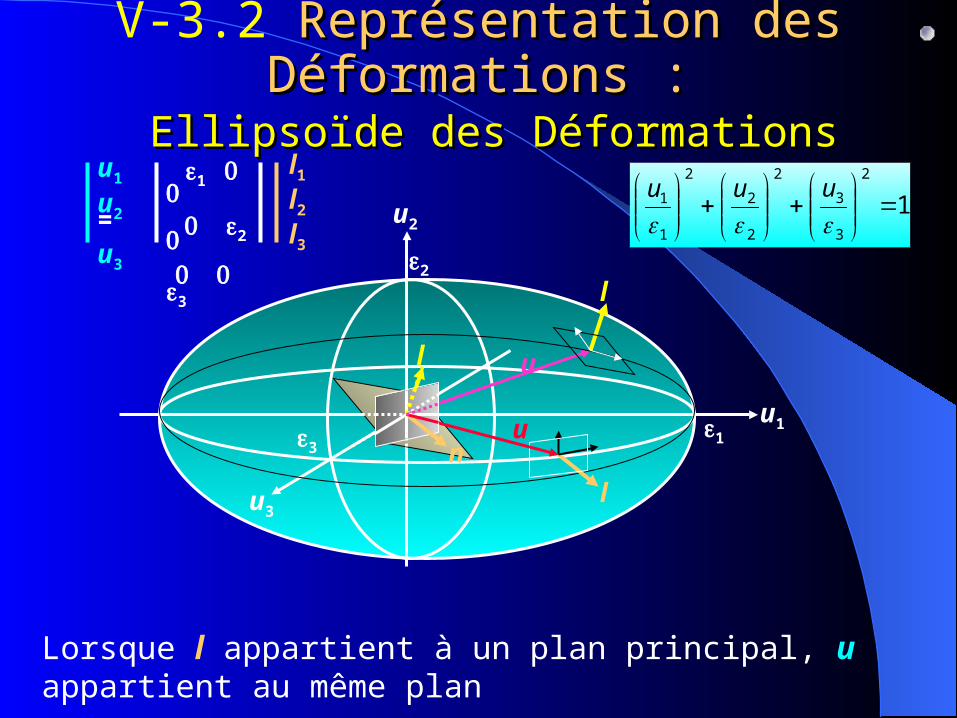
V-3.2 Représentation des Déformations : Représentation des Déformations : Ellipsoïde des DéformationsEllipsoïde des Déformations
1u1
2
u2
u3
3
1
2
3
l1
l2
l3
u1
u2 =u3
12
3
3
2
2
2
2
1
1
uuu
l u
l
l
un
Lorsque l appartient à un plan principal, u appartient au même plan

r
t
Direction x2
x3
x1
x2
r
l
t
r
l
t
V-3.3 Représentation des Déformations : Représentation des Déformations : Cercle de Mohr PrincipalCercle de Mohr Principal
1
2
3
)(MDirection x1
x1
x2
x3
ll= 1
lr= 0
u ll= 2
lr= 0
1
x1
2
x2
C
R
u
lr
ll
ll
lr
l
ll = u l = l l = OC+Rcos2lr = u r = l r = -Rsin2
R=
OC=
221
221
Direction lx3
x1
x2
l
u
Directions à la direction principale x3
au plan x1 x2
O
lr
ll

V-3.4 Représentation des Déformations : Représentation des Déformations : Cercle de Mohr et DéformationCercle de Mohr et Déformation
X u
ll
lr 1
2
X x
C
u
u
x
u
xX
ll
lr
1 2
ll
lr
1
2
1
ll
lr
2
X
x
x = X + u
x1
x2
1
2
3
=
Plan principal x1 x2
2

Direction l appartenant à un plan principal (x1 x2)
V-3.5 Représentation des Déformations : Représentation des Déformations : Cercles de MohrCercles de Mohr
tr
l
)(M 1
2
3
x1
x2
x3
ll
lr
3 12
ulr
ll
Direction l n’appartenant pas à un plan principalx2
x3
l
t
rx1
ll
lr
1
3 2lr ll
u

V-3.6 Représentation des Déformations : Représentation des Déformations : Glissement Pur et Glissement SimpleGlissement Pur et Glissement Simple
x1
x2
La distorsion est maximale sur les directions orientées à 45° des directions principales
Le glissement est le double de la distorsion = 2
-
lr
llX1
X2
X2
-X1
x2-
x1
X1
X2
-
x1
x2x2
x1
-
X1
X2
2
G
La rotation = -

VIVI Relation Contraintes - Déformation Relation Contraintes - Déformation
VI-1 Contraintes et DéformationsVI-2 Lois de ComportementVI-3 et Nominales et NaturellesVI-4 Le Travail de Déformation
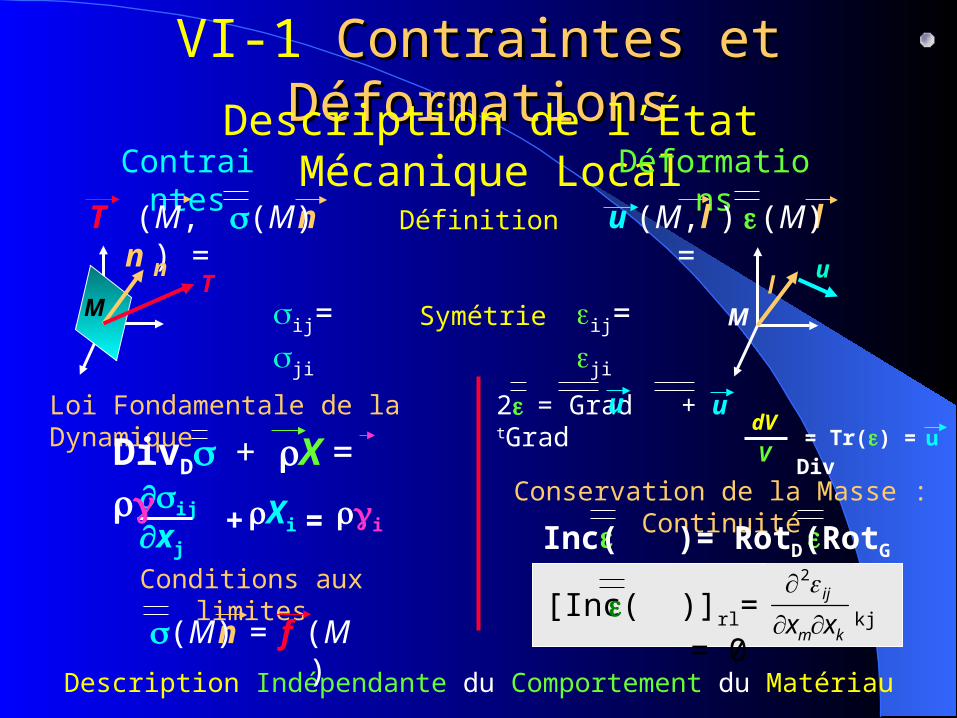
VI-1 Contraintes et Déformations Contraintes et DéformationsDescription de l’État Mécanique Local
Description Indépendante du Comportement du Matériau
Symétrieij= ji ij= ji
Conservation de la Masse : Continuité
Inc( )= RotD(RotG ) = 0
[Inc( )]rl= rmilkj = 0 km
ij
xx 2
Conditions aux limites
Loi Fondamentale de la Dynamique
ij
xj+ =Xi i
(M) f n(M) =
DivD+ X =
Contraintes Déformations
Définition (M,l ) =u l(M)(M, n ) =T n(M)
TM
n
Ml
u
dV
V = Tr() = Div u
2= Grad + tGraduu

VI-2 Lois de Comportement Lois de ComportementÉquation d’État du Matériau
Description du Comportement du Matériau
Élasticité Plasticité Rupture
Viscosité
Déformations Contraintesddt
, , ddt, }= 0F{
Solution du Problème
=>
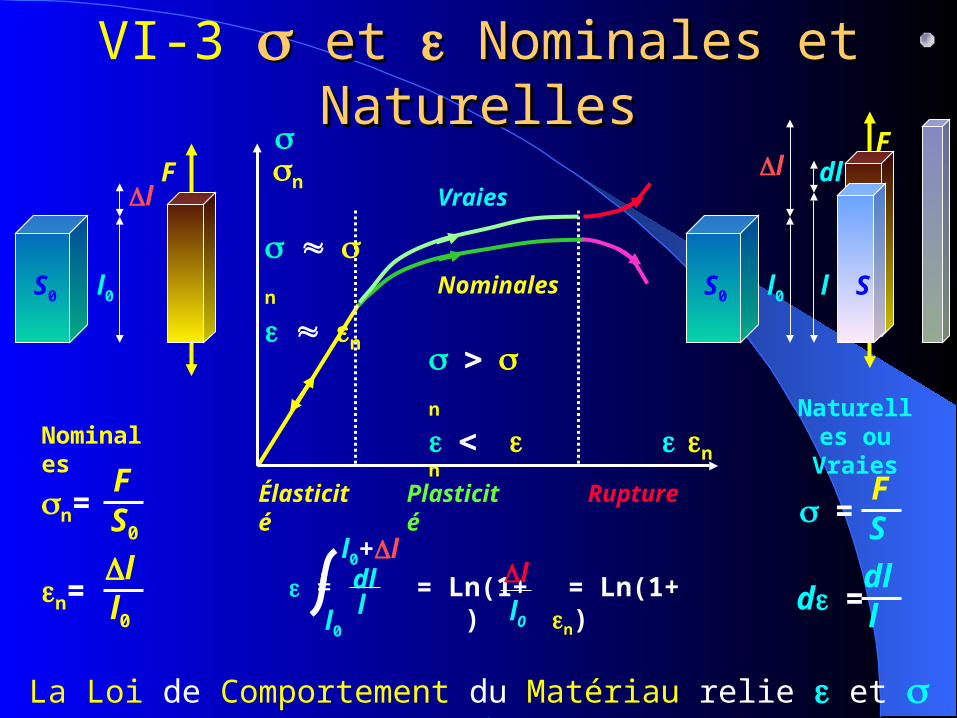
VI-3 et et Nominales et Naturelles Nominales et Naturelles
La Loi de Comportement du Matériau relie et Vraies
Élasticité Plasticité Rupture
lF
l0S0 Nominales
Vraies
n
n
l0S0
Nominales
n=FS0
n=ll0
lF
dl
l S
Naturelles ou Vraies
=FS
d=dll
=l0
l0+ldll
= Ln(1+ )l
l0
= Ln(1+ n)
n
nn
n

VI-4VI-4 Le Travail de Déformation Le Travail de Déformation
VI-4.1 Travail des Forces ExternesVI-4.2 Champs admissibles et Travaux virtuelsVI-4.3 Relation avec la ThermodynamiqueVI-4.4 Réversibilités Thermique et Mécanique

VI-4.1 Le Travail de Déformation : Le Travail de Déformation : Travail des Forces ExternesTravail des Forces Externes
n Normale Extérieure f Force Extérieure Appliquée (/ unité de surface)
Forces de Volume : - Force d’Inertie
X Force Extérieure Appliquée (/ unité de masse)
X
Forces de Surface : f
n
V
S )()( MfnM
= dVuV
+ dVuXV
+
SdSuf
u
+ => Champ de déplacement u
dVWV
= V
dV))(( Tr + V
dVuDDiv
=dVWV dVuX
V
)( DDiv +
VdV)( Tr + V
dV)( Tr
W = Tr()
S
dSuf
VdVu)(
Div=
Équilibre Dynamique Anti Symétrie

VI-4.2 Le Travail de Déformation : Le Travail de Déformation : Champs admissibles et Travaux virtuelsChamps admissibles et Travaux virtuels
Dynamiquement admissible*+* X* *DivD =n = f**
Loi de Comportement
Inc( )0*=F{ }
**
*X* f** * Virtuels
f
Solution réelle
X
Cinématiquement admissible’u’ Continu dérivable
Inc( ) =0’
u’ ’’ Virtuels
=F{ }
’ ’Loi de Comportement
n f’et DivD’+ X
W = Tr()
* ’
u’=*= W = Tr()
Récupérable (Élasticité)
Dissipé (Viscosité Rupture)
Bloqué (Plasticité){

VI-4.3 Le Travail de Déformation : Le Travail de Déformation : Relation avec la ThermodynamiqueRelation avec la Thermodynamique
1er principe
VEdV V
WdV= VQdV+
SdSnq-
E = Tr()+Q-Divq
2ème principe VSdV V
dVT
Q
SdSn
T
q
- 0+
)( TrW VS
dVqdSnq
Div et
E densité volumique d’énergie interneF densité volumique d’énergie libreS densité volumique d’entropieW densité volumique de travail reçuQ densité volumique de chaleur reçue
V
Sq flux de chaleur sortant
n
TF=E-TS
et VS
dVT
qdSn
T
q
Div 2
1
T
Tqq
TT
q GradDivDiv
)()(
)()(
TSF
ESTqQST
Tr
TrDiv
et
1 = Tr() – (F+ST)
2 = –( GradT)qT
intrinsèque
thermiqueIncréments de dissipation volumique = 1 + 2 0
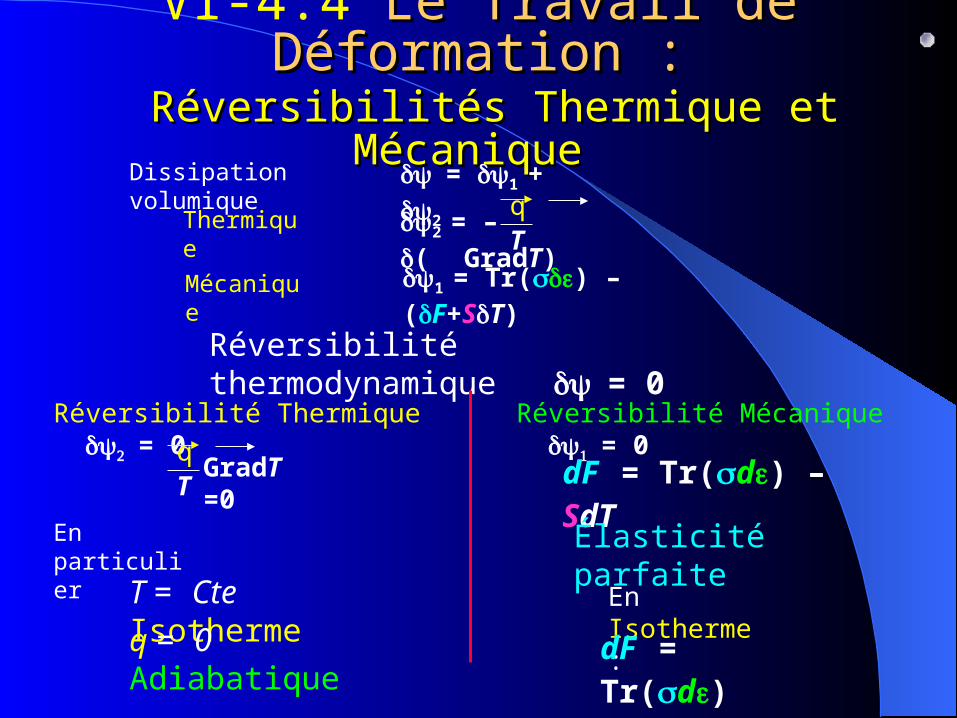
VI-4.4 Le Travail de Déformation : Le Travail de Déformation : Réversibilités Thermique et MécaniqueRéversibilités Thermique et Mécanique
1 = Tr() – (F+ST)
2 = –( GradT)qT
Mécanique
Thermique
Dissipation volumique = 1 + 2
Réversibilité thermodynamique = 0
Réversibilité Thermique = 0
GradT =0qT
En particulier
T = Cte Isotherme
q = 0 Adiabatique
Réversibilité Mécanique = 0
dF = Tr(d) – SdT
En Isotherme :
Élasticité parfaite
dF = Tr(d)