contact and symplectic geometry of monge-ampère … · contact and symplectic geometry of...
TRANSCRIPT
Contact and Symplectic Geometry of
Monge-Ampere Equations: Introduction
and Examples
Vladimir Rubtsov,ITEP,Moscow and LAREMA, Universite d’Angers
Workshop "Geometry and Fluids"Clay Mathematical Institute,
Oxford University UK, April 07, 2014
Plan
Introduction
Effective forms and Monge-Ampere operators
Symplectic Transformations of MAOSolutions of symplectic MAE
Monge-Ampere and Geometric StructuresClassification of SMAE on R2
SMAE in 3D
Bibliography:
Figure: Cambridge University Press, 2007
Basic object
Figure: Monge and Ampere
A∂2f
∂q21
+ 2B∂2f
∂q1∂q2
+ C∂2f
∂q22
+ D(∂2f
∂q21
· ∂2f
∂q22
− (∂f
∂q1∂q2
)2)
+ E = 0
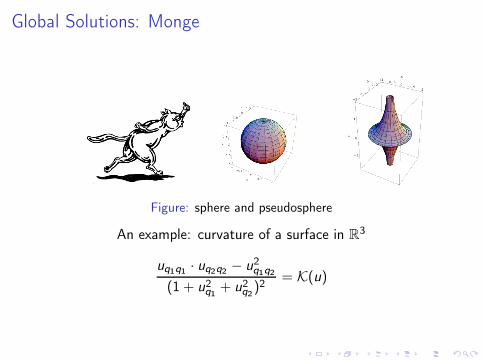
Global Solutions: Monge
Figure: sphere and pseudosphere
An example: curvature of a surface in R3
uq1q1· uq2q2
− u2q1q2
(1 + u2q1
+ u2q2)2
= K(u)
Main idea
Let F : Rn → (i)Rn be a vector-function and its graph is asubspace in T ∗(Rn) = Rn ⊕ (i)Rn.
Main idea
Let F : Rn → (i)Rn be a vector-function and its graph is asubspace in T ∗(Rn) = Rn ⊕ (i)Rn.
The tangent space to the graph at the point (x ,F (x)) is thegraph of (dF )x - the differential of F at the point x .
Main idea
Let F : Rn → (i)Rn be a vector-function and its graph is asubspace in T ∗(Rn) = Rn ⊕ (i)Rn.
The tangent space to the graph at the point (x ,F (x)) is thegraph of (dF )x - the differential of F at the point x .
This graph is a Lagrangian subspace in T ∗(Rn) iff (dF )x is asymmetric endomorphism . The matrix || ∂Fi
∂xj|| is symmetric
∀x iff the differential form∑
i Fidxi ∈ Λ1(Rn) is closed or,equivalently, exact:
Fi =∂f
∂xi=⇒ F = ∇f .
Main idea
Let F : Rn → (i)Rn be a vector-function and its graph is asubspace in T ∗(Rn) = Rn ⊕ (i)Rn.
The tangent space to the graph at the point (x ,F (x)) is thegraph of (dF )x - the differential of F at the point x .
This graph is a Lagrangian subspace in T ∗(Rn) iff (dF )x is asymmetric endomorphism . The matrix || ∂Fi
∂xj|| is symmetric
∀x iff the differential form∑
i Fidxi ∈ Λ1(Rn) is closed or,equivalently, exact:
Fi =∂f
∂xi=⇒ F = ∇f .
The projection of the graph of ∇f on (Rn)x is given in
coordinates by ∇2(f ) = det || ∂2fi∂x2
j
|| .
Symplectic Linear Algebra Digression
Let (V ,Ω) be a symplectic 2n-dimensional vector space over Rand Λ∗(V ∗) the space of exteriors forms on V . LetΓ : V → V ∗ be the isomorphism determined by Ω and letXΩ ∈ Λ2(V ) be the unique bivector such that Γ∗(XΩ) = Ω.
Symplectic Linear Algebra Digression
Let (V ,Ω) be a symplectic 2n-dimensional vector space over Rand Λ∗(V ∗) the space of exteriors forms on V . LetΓ : V → V ∗ be the isomorphism determined by Ω and letXΩ ∈ Λ2(V ) be the unique bivector such that Γ∗(XΩ) = Ω.
We introduce the operators ⊤ : Λk(V ∗) → Λk+2(V ∗),ω 7→ ω ∧ Ω and ⊥ : Λk(V ∗) → Λk−2(V ∗), ω 7→ iXΩ
(ω). Theyhave the followings properties:

Symplectic Linear Algebra Digression
Let (V ,Ω) be a symplectic 2n-dimensional vector space over Rand Λ∗(V ∗) the space of exteriors forms on V . LetΓ : V → V ∗ be the isomorphism determined by Ω and letXΩ ∈ Λ2(V ) be the unique bivector such that Γ∗(XΩ) = Ω.
We introduce the operators ⊤ : Λk(V ∗) → Λk+2(V ∗),ω 7→ ω ∧ Ω and ⊥ : Λk(V ∗) → Λk−2(V ∗), ω 7→ iXΩ
(ω). Theyhave the followings properties:
[⊥,⊤](ω) = (n − k)ω , ∀ω ∈ Λk(V ∗);
⊥ : Λk(V ∗) → Λk−2(V ∗) is into for k ≥ n + 1;
⊤ : Λk(V ∗) → Λk+2(V ∗) is into for k ≤ n − 1.
Symplectic Linear Algebra Digression
Let (V ,Ω) be a symplectic 2n-dimensional vector space over Rand Λ∗(V ∗) the space of exteriors forms on V . LetΓ : V → V ∗ be the isomorphism determined by Ω and letXΩ ∈ Λ2(V ) be the unique bivector such that Γ∗(XΩ) = Ω.
We introduce the operators ⊤ : Λk(V ∗) → Λk+2(V ∗),ω 7→ ω ∧ Ω and ⊥ : Λk(V ∗) → Λk−2(V ∗), ω 7→ iXΩ
(ω). Theyhave the followings properties:
[⊥,⊤](ω) = (n − k)ω , ∀ω ∈ Λk(V ∗);
⊥ : Λk(V ∗) → Λk−2(V ∗) is into for k ≥ n + 1;
⊤ : Λk(V ∗) → Λk+2(V ∗) is into for k ≤ n − 1.
A k-form ω is effective if ⊥ω = 0 and we will denote byΛkε (V
∗) the vector space of effective k-forms on V . Whenk = n, ω is effective if and only if ω ∧ Ω = 0.
Hodge-Lepage-Lychagin theorem
Figure: Hodge and Lychagin
The next theorem plays the fundamental role played by the effectiveforms in the theory of Monge-Ampere operators :
Theorem (Hodge-Lepage-Lychagin)
Every form ω ∈ Λk(V ∗) can be uniquely decomposed into the
finite sum
ω = ω0 +⊤ω1 +⊤2ω2 + . . . ,
where all ωi are effective forms.
Hodge-Lepage-Lychagin theorem
Figure: Hodge and Lychagin
The next theorem plays the fundamental role played by the effectiveforms in the theory of Monge-Ampere operators :
Theorem (Hodge-Lepage-Lychagin)
Every form ω ∈ Λk(V ∗) can be uniquely decomposed into the
finite sum
ω = ω0 +⊤ω1 +⊤2ω2 + . . . ,
where all ωi are effective forms.
If two effective k-forms vanish on the same k-dimensional
isotropic vector subspaces in (V ,Ω), they are proportional.
MAO definition
Let M be an n-dimensional smooth manifold. Denote by J1M
the space of 1-jets of smooth functions on M and byj1(f ) : M → J1M, x 7→ [f ]1x the natural section associatedwith a smooth function f on M.
MAO definition
Let M be an n-dimensional smooth manifold. Denote by J1M
the space of 1-jets of smooth functions on M and byj1(f ) : M → J1M, x 7→ [f ]1x the natural section associatedwith a smooth function f on M.
The Monge-Ampere operator
∆ω : C∞(M) → Ωn(M)
associated with a differential n-form ω ∈ Ωn(J1M) is thedifferential operator
∆ω(f ) = j1(f )∗(ω).
Contact Structure
A contact structures is some analogue of symplectic structure onodd-dimensional manifold. A differential 1-form U on a smoothmanifold M is called nondegenerate if the following conditionshold:
The map P : a ∋ M 7→ ker Ua ⊂ TaM is a 1-codimensionaldistribution;
Contact Structure
A contact structures is some analogue of symplectic structure onodd-dimensional manifold. A differential 1-form U on a smoothmanifold M is called nondegenerate if the following conditionshold:
The map P : a ∋ M 7→ ker Ua ⊂ TaM is a 1-codimensionaldistribution;
A restriction of dU to the hyperplane P(a) is a symplecticstructure on P(a) for any a ∈ M .
Contact Structure
A contact structures is some analogue of symplectic structure onodd-dimensional manifold. A differential 1-form U on a smoothmanifold M is called nondegenerate if the following conditionshold:
The map P : a ∋ M 7→ ker Ua ⊂ TaM is a 1-codimensionaldistribution;
A restriction of dU to the hyperplane P(a) is a symplecticstructure on P(a) for any a ∈ M .
The last condition means that if a vector Xa ∈ P(a) andXa⌋
(
dU|P(a)
)
= 0, then Xa = 0. In other words, a differential1-form U is nondegenerate if the distribution P has nocharacteristic symmetries.
Example: Cartan form
The Cartan form U = du − pdx on R3 is a nondegenerate1-form.
Example: Cartan form
The Cartan form U = du − pdx on R3 is a nondegenerate1-form.
Figure: Contact structure in R3
Generalized Solutions
Let U be the contact 1-form on J1M and X1 be the Reeb’svector field. Denote by C (x) the kernel of Ux for x ∈ J1M.
Generalized Solutions
Let U be the contact 1-form on J1M and X1 be the Reeb’svector field. Denote by C (x) the kernel of Ux for x ∈ J1M.
(C (x), dUx ) is a 2n-dimensional symplectic vector space and
TxJ1M = C (x)⊕ RX1x .
Generalized Solutions
Let U be the contact 1-form on J1M and X1 be the Reeb’svector field. Denote by C (x) the kernel of Ux for x ∈ J1M.
(C (x), dUx ) is a 2n-dimensional symplectic vector space and
TxJ1M = C (x)⊕ RX1x .
A generalized solution of the equation ∆ω = 0 is a legendriansubmanifold Ln of (J1M,U) such that ω|L = 0. Note that TxL
is a lagrangian subspace of (C (x), dUx ) in each point x ∈ L,and that L is locally the graph of a section j1(f ), where f is aregular solution of the equation ∆ω(f ) = 0, if and only if theprojection π : J1M → M is a local diffeomorphism on L.
Effective Forms - MAO Correspondence
Denote by Ω∗(C ∗) the space of differential forms vanishing onX1. In each point x , (Ωk(C ∗))x can be naturally identifiedwith Λk(C (x)∗).
Effective Forms - MAO Correspondence
Denote by Ω∗(C ∗) the space of differential forms vanishing onX1. In each point x , (Ωk(C ∗))x can be naturally identifiedwith Λk(C (x)∗).
Let Ω∗ε(C
∗) be the space of forms which are effective on(C (x), dUx ) in each point x ∈ J1M.
Effective Forms - MAO Correspondence
Denote by Ω∗(C ∗) the space of differential forms vanishing onX1. In each point x , (Ωk(C ∗))x can be naturally identifiedwith Λk(C (x)∗).
Let Ω∗ε(C
∗) be the space of forms which are effective on(C (x), dUx ) in each point x ∈ J1M.
The first part of the Hodge-Lepage-Lychagin theorem meansthat
Ω∗ε(C
∗) = Ω∗(J1M)/IC ,
where IC is the Cartan ideal generated by U and dU.
Effective Forms - MAO Correspondence
Denote by Ω∗(C ∗) the space of differential forms vanishing onX1. In each point x , (Ωk(C ∗))x can be naturally identifiedwith Λk(C (x)∗).
Let Ω∗ε(C
∗) be the space of forms which are effective on(C (x), dUx ) in each point x ∈ J1M.
The first part of the Hodge-Lepage-Lychagin theorem meansthat
Ω∗ε(C
∗) = Ω∗(J1M)/IC ,
where IC is the Cartan ideal generated by U and dU.
The second part means that two differential n-forms ω and θon J1M determine the same Monge-Ampere operator if andonly if ω − θ ∈ IC .
Contact Groupe Action
Ct(M), the pseudo-group of contact diffeomorphisms on J1M,naturally acts on the set of Monge-Ampere operators in thefollowing way
Contact Groupe Action
Ct(M), the pseudo-group of contact diffeomorphisms on J1M,naturally acts on the set of Monge-Ampere operators in thefollowing way
F (∆ω) = ∆F∗(ω),
and the corresponding infinitesimal action is
X (∆ω) = ∆LX (ω).
Symplectic MAO-1
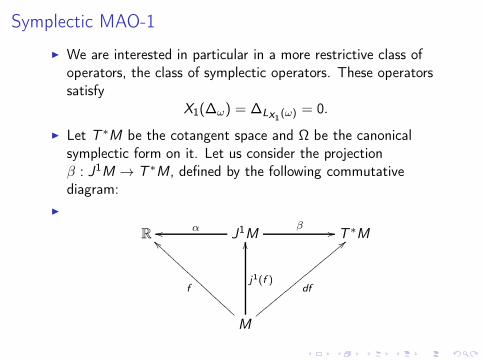
We are interested in particular in a more restrictive class ofoperators, the class of symplectic operators. These operatorssatisfy
X1(∆ω) = ∆LX1(ω) = 0.
Symplectic MAO-1
We are interested in particular in a more restrictive class ofoperators, the class of symplectic operators. These operatorssatisfy
X1(∆ω) = ∆LX1(ω) = 0.
Let T ∗M be the cotangent space and Ω be the canonicalsymplectic form on it. Let us consider the projectionβ : J1M → T ∗M, defined by the following commutativediagram:
Symplectic MAO-1
We are interested in particular in a more restrictive class ofoperators, the class of symplectic operators. These operatorssatisfy
X1(∆ω) = ∆LX1(ω) = 0.
Let T ∗M be the cotangent space and Ω be the canonicalsymplectic form on it. Let us consider the projectionβ : J1M → T ∗M, defined by the following commutativediagram:
R J1Mαoo β // T ∗M
M
f
``BBBBBBBBBBBBBBBBB
j1(f )
OO
df
<<zzzzzzzzzzzzzzzzzz
Symplectic MAO-2
We can naturally identify the space ω ∈ Ω∗ε(C
∗) : LX1ω = 0
with the space of effective forms on (T ∗M,Ω) using thisprojection β. Then, the group acting on these forms is thegroup of symplectomorphisms of T ∗M.
Symplectic MAO-2
We can naturally identify the space ω ∈ Ω∗ε(C
∗) : LX1ω = 0
with the space of effective forms on (T ∗M,Ω) using thisprojection β. Then, the group acting on these forms is thegroup of symplectomorphisms of T ∗M.
DefinitionA Monge-Ampere structure on a 2n-dimensional manifold X is a
pair of differential form (Ω, ω) ∈ Ω2(X )× Ωn(X ) such that Ω is
symplectic and ω is Ω-effective i.e. Ω ∧ ω = 0.
Symplectic MAO-2
We can naturally identify the space ω ∈ Ω∗ε(C
∗) : LX1ω = 0
with the space of effective forms on (T ∗M,Ω) using thisprojection β. Then, the group acting on these forms is thegroup of symplectomorphisms of T ∗M.
DefinitionA Monge-Ampere structure on a 2n-dimensional manifold X is a
pair of differential form (Ω, ω) ∈ Ω2(X )× Ωn(X ) such that Ω is
symplectic and ω is Ω-effective i.e. Ω ∧ ω = 0.
When we locally identify the symplectic manifold (X ,Ω) with(T ∗Rn,Ω0), we can associate to the pair (Ω, ω) a symplecticMonge-Ampere equation ∆ω = 0.
Symplectic MAO-2
We can naturally identify the space ω ∈ Ω∗ε(C
∗) : LX1ω = 0
with the space of effective forms on (T ∗M,Ω) using thisprojection β. Then, the group acting on these forms is thegroup of symplectomorphisms of T ∗M.
DefinitionA Monge-Ampere structure on a 2n-dimensional manifold X is a
pair of differential form (Ω, ω) ∈ Ω2(X )× Ωn(X ) such that Ω is
symplectic and ω is Ω-effective i.e. Ω ∧ ω = 0.
When we locally identify the symplectic manifold (X ,Ω) with(T ∗Rn,Ω0), we can associate to the pair (Ω, ω) a symplecticMonge-Ampere equation ∆ω = 0.
Conversely, any symplectic Monge-Ampere equation ∆ω = 0on a manifold M is associated with Monge-Ampere structure(Ω, ω) on T ∗M.
Correspondence: Forms -Symplectic MAO
Let M be a smooth n−dimensional manifold and ω is a differentialn-form on T ∗M. A (symplectic) Monge-Ampere operator∆ω : C∞(M) → Ωn(M) is the differential operator defined by
∆ω(f ) = (df )∗(ω),
where df : M → T ∗M is the natural section associated to f .
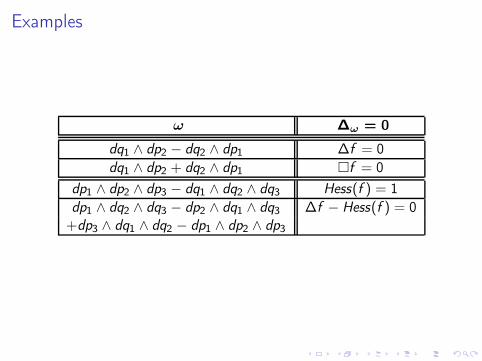
Examples
ω ∆ω = 0
dq1 ∧ dp2 − dq2 ∧ dp1 ∆f = 0
dq1 ∧ dp2 + dq2 ∧ dp1 f = 0
dp1 ∧ dp2 ∧ dp3 − dq1 ∧ dq2 ∧ dq3 Hess(f ) = 1
dp1 ∧ dq2 ∧ dq3 − dp2 ∧ dq1 ∧ dq3 ∆f − Hess(f ) = 0+dp3 ∧ dq1 ∧ dq2 − dp1 ∧ dp2 ∧ dp3
Generic types of singularities for Generalized solutions ofMAE
Figure: Lagrangian singularities (Wave fronts, foldings etc.)
Symplectic Monge-Ampere Equations: Solutions
A generalized solution of a MAE ∆ω = 0 is a lagrangiansubmanifold of (T ∗M,Ω) which is an integral manifold for theMA differential form ω:
ω|L = 0.
Symplectic Monge-Ampere Equations: Solutions
A generalized solution of a MAE ∆ω = 0 is a lagrangiansubmanifold of (T ∗M,Ω) which is an integral manifold for theMA differential form ω:
ω|L = 0.
A generalized solution (generically) locally is the graph of an1-forme df for a regular solution f .
Generalized solution
Rn
T Rn
π
L
*
df
dg
dh
Figure: Generalized solution of a MAE
Symplectic Equivalence-1
Two SMAE ∆ω1= 0 and ∆ω2
= 0 are locally equivalent iffthere is exist a local symplectomorphismF : (T ∗M,Ω) → (T ∗M,Ω) such that
F ∗ω1 = ω2.
Symplectic Equivalence-1
Two SMAE ∆ω1= 0 and ∆ω2
= 0 are locally equivalent iffthere is exist a local symplectomorphismF : (T ∗M,Ω) → (T ∗M,Ω) such that
F ∗ω1 = ω2.
L is a generalized solution of ∆F∗ω1= 0 iff F (L) is a
generalized solution of ∆ω = 0.
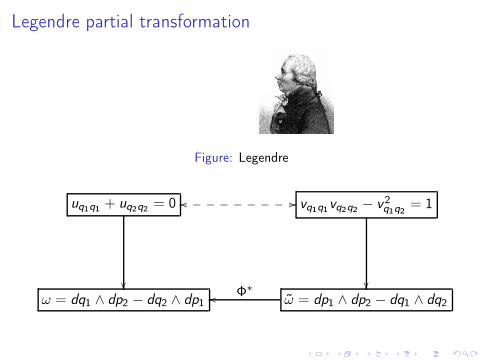
Legendre partial transformation
Figure: Legendre
uq1q1+ uq2q2
= 0 oo //_________
vq1q1vq2q2
− v2q1q2
= 1
ω = dq1 ∧ dp2 − dq2 ∧ dp1 ω = dp1 ∧ dp2 − dq1 ∧ dq2
Φ∗oo
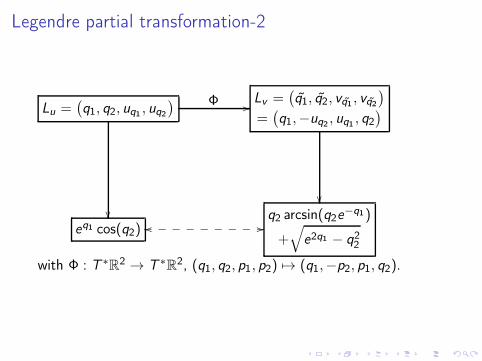
Legendre partial transformation-2
Lu =(
q1, q2, uq1, uq2
) Φ //
Lv =(
q1, q2, vq1, vq2
)
=(
q1,−uq2, uq1
, q2
)
eq1 cos(q2) oo //_________q2 arcsin(q2e
−q1)
+√
e2q1 − q22
with Φ : T ∗R2 → T ∗R2, (q1, q2, p1, p2) 7→ (q1,−p2, p1, q2).
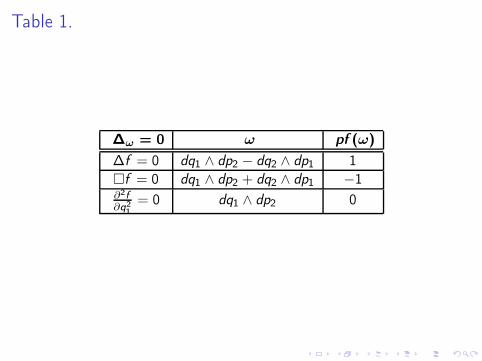
Table 1.
∆ω = 0 ω pf (ω)
∆f = 0 dq1 ∧ dp2 − dq2 ∧ dp1 1
f = 0 dq1 ∧ dp2 + dq2 ∧ dp1 −1∂2f∂q2
1
= 0 dq1 ∧ dp2 0
Geometric Structures on T∗R2.
Let (Ω, ω) be a Monge-Ampere structure on X = R4. The field ofendomorphisms Aω : X → TX ⊗ T ∗X is defined by
ω(·, ·) = Ω(Aω·, ·).
REMARK The tensor
Jω =Aω
√
|pf (ω)|
gives
an almost-complex structure on X if pf (ω) > 0.
Geometric Structures on T∗R2.
Let (Ω, ω) be a Monge-Ampere structure on X = R4. The field ofendomorphisms Aω : X → TX ⊗ T ∗X is defined by
ω(·, ·) = Ω(Aω·, ·).
REMARK The tensor
Jω =Aω
√
|pf (ω)|
gives
an almost-complex structure on X if pf (ω) > 0.
an almost-product structure on X if pf (ω) < 0.
THEOREM (Lychagin-R.)
Let ω ∈ Ω2ε(R
4) be an effective non-degenerate 2-form on (R4,Ω).
The following assertions are equivalent:
THEOREM (Lychagin-R.)
Let ω ∈ Ω2ε(R
4) be an effective non-degenerate 2-form on (R4,Ω).
The following assertions are equivalent:
The equation ∆ω = 0 is locally equivalent to one of two linearequations: ∆f = 0 ou f = 0;
THEOREM (Lychagin-R.)
Let ω ∈ Ω2ε(R
4) be an effective non-degenerate 2-form on (R4,Ω).
The following assertions are equivalent:
The equation ∆ω = 0 is locally equivalent to one of two linearequations: ∆f = 0 ou f = 0;
The tensor Jω is integrable;
THEOREM (Lychagin-R.)
Let ω ∈ Ω2ε(R
4) be an effective non-degenerate 2-form on (R4,Ω).
The following assertions are equivalent:
The equation ∆ω = 0 is locally equivalent to one of two linearequations: ∆f = 0 ou f = 0;
The tensor Jω is integrable;
the normalized form ω√|pf (ω)|
is closed.
Courant Bracket
T−tangent bundle of M and T ∗− cotangent bundle.
(X + ξ,Y + η) =1
2(ξ(Y ) + η(X )),
-natural indefinite interior product on T ⊕ T ∗.The Courant bracket on sections of T ⊕ T ∗ is
[X + ξ,Y + η] = [X ,Y ] + LXη − LY ξ − 1
2d(ιXη − ιY ξ).
Generalized Complex Geometry
Figure: Hitchin
DEFINITION [Hitchin]: An almost generalized complex structureis a bundle map J : T ⊕ T ∗ → T ⊕ T ∗ with
J2 = −1,
and(J·, ·) = −(·, J·).
An almost generalized complex structure is integrable if the spacesof sections of its two eigenspaces are closed under the Courantbracket.
2D SMAE and Generalized Complex Geometry
DEFINITION A Monge-Ampere equation ∆ω = 0 has adivergent type if the corresponded form can be chosen closed :ω′ = ω + µΩ.
2D SMAE and Generalized Complex Geometry
DEFINITION A Monge-Ampere equation ∆ω = 0 has adivergent type if the corresponded form can be chosen closed :ω′ = ω + µΩ.
PROPOSITION (B.Banos)Let ∆ω = 0 be a Monge-Ampere divergent type equation onR2 with closed ω (which might be non-effective). Thegeneralized almost-complex structure defined by
Jω =
(
Aω Ω−1
−Ω(1 + A2ω·, ·) −A∗
ω
)
is integrable.
Hitchin pairs (after M.Crainic)
A Hitchin pair is a pair of bivectors π and Π, Π− non-degenerate,satisfying
[Π,Π] = [π, π]
[Π, π] = 0.(1)
PROPOSITION There is a 1-1 correspondence betweenGeneralized complex structure
J =
(
A πA
σ −A∗
)
with σ non degenerate and Hitchin pairs of bivector (π,Π). In thiscorrespondence
σ = Π−1
A = π Π−1
πA = −(1 + A2)Π
Hitchin pair of bivectors in 4D
Π is non-degenerate ⇒ two 2-forms ω and Ω, not necessarily closedand ω(·, ·) = Ω(A·, ·).A generalized lagrangian surface: closed under A, or equivalently,bilagrangian: ω|L = Ω|L = 0.Locally, L is defined by two functions u and v satisfying a first ordersystem:
Jacobi systems
a + b ∂u∂x
+ c ∂u∂y
+ d ∂v∂x
+ e ∂v∂y
+ f det Ju,v = 0
A + B ∂u∂x
+ C ∂u∂y
+ D ∂v∂x
+ E ∂v∂y
+ E det Ju,v = 0
Ju,v =
(
∂u∂x
∂u∂y
∂v∂x
∂v∂y
)
Such a system generalizes both MAE and Cauchy-Riemann systemsand is called a Jacobi system.
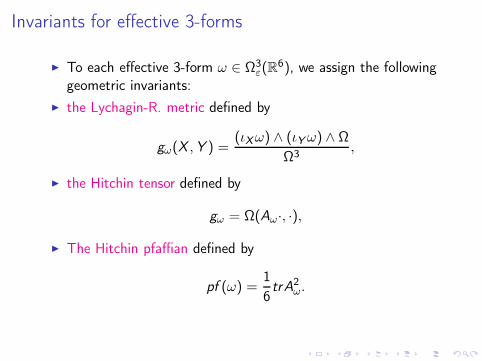
Invariants for effective 3-forms
To each effective 3-form ω ∈ Ω3ε(R
6), we assign the followinggeometric invariants:
Invariants for effective 3-forms
To each effective 3-form ω ∈ Ω3ε(R
6), we assign the followinggeometric invariants:
the Lychagin-R. metric defined by
gω(X ,Y ) =(ιXω) ∧ (ιYω) ∧ Ω
Ω3,
Invariants for effective 3-forms
To each effective 3-form ω ∈ Ω3ε(R
6), we assign the followinggeometric invariants:
the Lychagin-R. metric defined by
gω(X ,Y ) =(ιXω) ∧ (ιYω) ∧ Ω
Ω3,
the Hitchin tensor defined by
gω = Ω(Aω·, ·),
Invariants for effective 3-forms
To each effective 3-form ω ∈ Ω3ε(R
6), we assign the followinggeometric invariants:
the Lychagin-R. metric defined by
gω(X ,Y ) =(ιXω) ∧ (ιYω) ∧ Ω
Ω3,
the Hitchin tensor defined by
gω = Ω(Aω·, ·),
The Hitchin pfaffian defined by
pf (ω) =1
6trA2
ω.
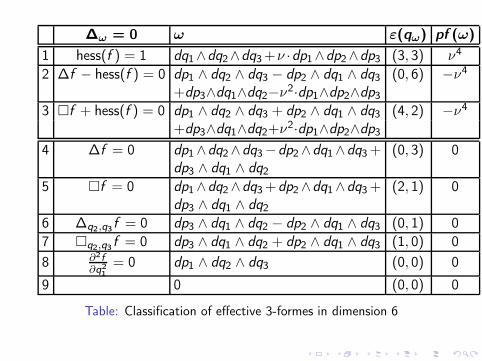
∆ω = 0 ω ε(qω) pf (ω)
1 hess(f ) = 1 dq1∧dq2∧dq3+ν ·dp1∧dp2∧dp3 (3, 3) ν4
2 ∆f − hess(f ) = 0 dp1 ∧ dq2 ∧ dq3 − dp2 ∧ dq1 ∧ dq3 (0, 6) −ν4
+dp3∧dq1∧dq2−ν2·dp1∧dp2∧dp3
3 f + hess(f ) = 0 dp1 ∧ dq2 ∧ dq3 + dp2 ∧ dq1 ∧ dq3 (4, 2) −ν4
+dp3∧dq1∧dq2+ν2·dp1∧dp2∧dp3
4 ∆f = 0 dp1∧dq2∧dq3−dp2∧dq1∧dq3+dp3 ∧ dq1 ∧ dq2
(0, 3) 0
5 f = 0 dp1∧dq2∧dq3+dp2∧dq1∧dq3+dp3 ∧ dq1 ∧ dq2
(2, 1) 0
6 ∆q2,q3f = 0 dp3 ∧ dq1 ∧ dq2 − dp2 ∧ dq1 ∧ dq3 (0, 1) 0
7 q2,q3f = 0 dp3 ∧ dq1 ∧ dq2 + dp2 ∧ dq1 ∧ dq3 (1, 0) 0
8 ∂2f∂q2
1
= 0 dp1 ∧ dq2 ∧ dq3 (0, 0) 0
9 0 (0, 0) 0
Table: Classification of effective 3-formes in dimension 6
3D Generalized Calabi-Yau structures
A generalized almost Calabi-Yau structure on a6D-manifold X is a 5-uple (g ,Ω,A, α, β) where
g is a (pseudo) metric on X ,
3D Generalized Calabi-Yau structures
A generalized almost Calabi-Yau structure on a6D-manifold X is a 5-uple (g ,Ω,A, α, β) where
g is a (pseudo) metric on X , Ω is a symplectic on X ,
A generalized Calabi-Yau structure (g ,Ω,K , α, β) is integrableif α and β are closed.
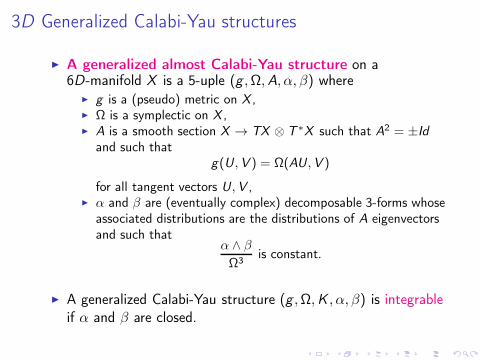
3D Generalized Calabi-Yau structures
A generalized almost Calabi-Yau structure on a6D-manifold X is a 5-uple (g ,Ω,A, α, β) where
g is a (pseudo) metric on X , Ω is a symplectic on X , A is a smooth section X → TX ⊗ T ∗X such that A2 = ±Id
and such thatg(U ,V ) = Ω(AU ,V )
for all tangent vectors U ,V ,
A generalized Calabi-Yau structure (g ,Ω,K , α, β) is integrableif α and β are closed.
3D Generalized Calabi-Yau structures
A generalized almost Calabi-Yau structure on a6D-manifold X is a 5-uple (g ,Ω,A, α, β) where
g is a (pseudo) metric on X , Ω is a symplectic on X , A is a smooth section X → TX ⊗ T ∗X such that A2 = ±Id
and such thatg(U ,V ) = Ω(AU ,V )
for all tangent vectors U ,V , α and β are (eventually complex) decomposable 3-forms whose
associated distributions are the distributions of A eigenvectorsand such that
α ∧ β
Ω3is constant.
A generalized Calabi-Yau structure (g ,Ω,K , α, β) is integrableif α and β are closed.
Generalized CY and MA
Each nondegenerate Monge-Ampere structure (Ω, ω0) defines ageneralized almost Calabi-Yau structure (qω ,Ω,Aω, α, β) with
ω =ω0
4
√
|λ(ω0)|.
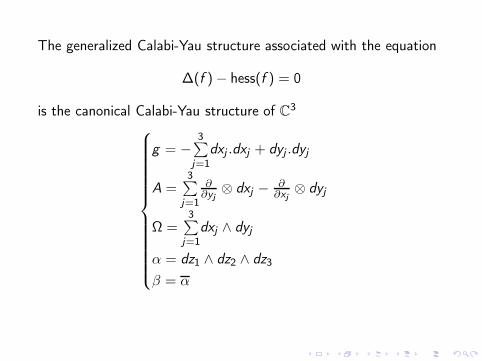
The generalized Calabi-Yau structure associated with the equation
∆(f )− hess(f ) = 0
is the canonical Calabi-Yau structure of C3
g = −3∑
j=1
dxj .dxj + dyj .dyj
A =3∑
j=1
∂∂yj
⊗ dxj − ∂∂xj
⊗ dyj
Ω =3∑
j=1
dxj ∧ dyj
α = dz1 ∧ dz2 ∧ dz3
β = α
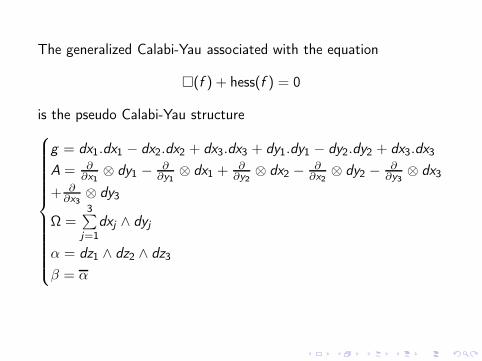
The generalized Calabi-Yau associated with the equation
(f ) + hess(f ) = 0
is the pseudo Calabi-Yau structure
g = dx1.dx1 − dx2.dx2 + dx3.dx3 + dy1.dy1 − dy2.dy2 + dx3.dx3
A = ∂∂x1
⊗ dy1 − ∂∂y1
⊗ dx1 +∂∂y2
⊗ dx2 − ∂∂x2
⊗ dy2 − ∂∂y3
⊗ dx3
+ ∂∂x3
⊗ dy3
Ω =3∑
j=1
dxj ∧ dyj
α = dz1 ∧ dz2 ∧ dz3
β = α
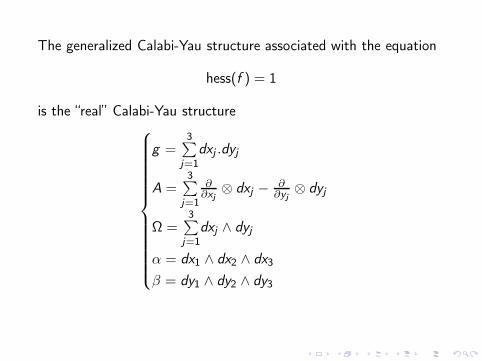
The generalized Calabi-Yau structure associated with the equation
hess(f ) = 1
is the “real” Calabi-Yau structure
g =3∑
j=1
dxj .dyj
A =3∑
j=1
∂∂xj
⊗ dxj − ∂∂yj
⊗ dyj
Ω =3∑
j=1
dxj ∧ dyj
α = dx1 ∧ dx2 ∧ dx3
β = dy1 ∧ dy2 ∧ dy3
THEOREM A SMAE ∆ω = 0 on R3 associated to aneffective non-degenerated form ω is locally equivalent to on ofthree following equations:
THEOREM A SMAE ∆ω = 0 on R3 associated to aneffective non-degenerated form ω is locally equivalent to on ofthree following equations:
hess(f ) = 1
∆f − hess(f ) = 0
f + hess(f ) = 0
THEOREM A SMAE ∆ω = 0 on R3 associated to aneffective non-degenerated form ω is locally equivalent to on ofthree following equations:
hess(f ) = 1
∆f − hess(f ) = 0
f + hess(f ) = 0
iff the correspondingly defined generalized Calabi-Yau structureis integrable and locally flat.