chapter 8 rtl t hiroot locus techniques - sejongdasan.sejong.ac.kr/~kwgwak/postings/automatic...
TRANSCRIPT

Chapter 8
R t L T h iRoot Locus Techniques

Introduction
S t f d t bilit d t i d b l d l l
Typical closed-loop feedback control system
)1()( +ssG)3()( +
=ssH
System performance and stability determined by closed-loop poles
)2()(
+=
sssG
)4()(
+=
ssH
)3()1( ++ ssK sKGsT )()( =
Open-loop TF Closed-loop TF
)4()3(
)2()1()()(
++
++
=ss
sssKsHsKG
Zeros -1, -3 KsKsKsssKsHsKG
sT
3)48()6()4)(1(
)()(1)(
23 +++++++
=
+=
•Location of poles easily found•Variation of gain K do not affect the
•Location of poles need to factor the denominator difficult
•variation of gain K do change the location of
Poles 0, -2, -4
Easy way to know the CL pole locations w/o solving higher-order characteristic equation of CLTF for various gain K?
f g fflocation of any poles poles
various gain K?Root locus
• graphical representation of the closed-loop poles as a function of system parameters• Can be used to design system parameters of the high order systems to yield a desired system
specifications• Estimating closed-loop poles’ location when gain K is varied using open-loop poles• Represent the poles of T(s) as K varies

Vector representation of complex numbers
Vector Representation of Complex Numbers
Vector representation of complex numbers
Magnitude M and angle as θ∠Mθ
ωσ js +=Complex number
Magnitude M and angle , as θ∠Mθ
jF +++ )()()(Comple f nction hen ωσ js +)()(F ωσ jaassF ++=+= )()()(Complex function when ωσ js +=
Complex function F(s) has a zero at -a
)()( assF +=
)( as +a complex number can be represented by avector drawn from the zero of the function to thepoint s
)()(Ex) 25)7()(
jsssF
+→+=

Complicated functionm
)(
)()(
1
1
i
n
j
ii
ps
zssF
+∏
+∏=
=
= ∏ : productM: number of zerosN: number of poles
where
Value of F(s) at any point s
Each complex factor vector magnitude & angle
Magnitude of F(s)
i
n
j
i
m
i
ps
zs
lengthspolelengthszeroM
+∏
+∏=
∏∏
=
=
=
1
1
j=1
izs + Magnitude of the vector drawn from to the point s
ips + Magnitude of the vector drawn from to the point sipiz
whereip g p
Angle of F(s) at any point s ∑∑ −=nm
polestoangleszerostoanglesθ
∑∑==
+∠−+∠=n
ji
m
ii pszs
11)()(
Measured from the positive real axispositive real axis

Ex) Find F(s) at the point s = -3 + j4
)2()1()(
++
=ssssF Magnitude
217.017520
414342
21
==+−+−
+−=
++
=∏∏
=jj
jss
slengthpolelengthzeroM
ooo 010491266116
)( −=∠ ∑∑ polestoangleszerostoanglessF
θθθ
Angle
o
ooo
3.114
0.1049.1266.116201
−=
−−=−−= −==−= ppz θθθ
oo 6.11642tan90 1 =⎟⎠⎞
⎜⎝⎛+ −
4 ⎠⎝
444 111 ⎟⎞
⎜⎛
⎟⎞
⎜⎛
⎟⎞
⎜⎛
or
o34.1141
4tan3
4tan2
4tan)( 111 −=⎟⎠⎞
⎜⎝⎛−
−⎟⎠⎞
⎜⎝⎛−
−⎟⎠⎞
⎜⎝⎛−
=∠ −−−sF

Subject tracking camera system
Properties of Root LocusKnob에해당
Subject tracking camera system
Equivalent closed loop TF Closed loop poles function of gain K
241010 2
2,1KP −±−
=
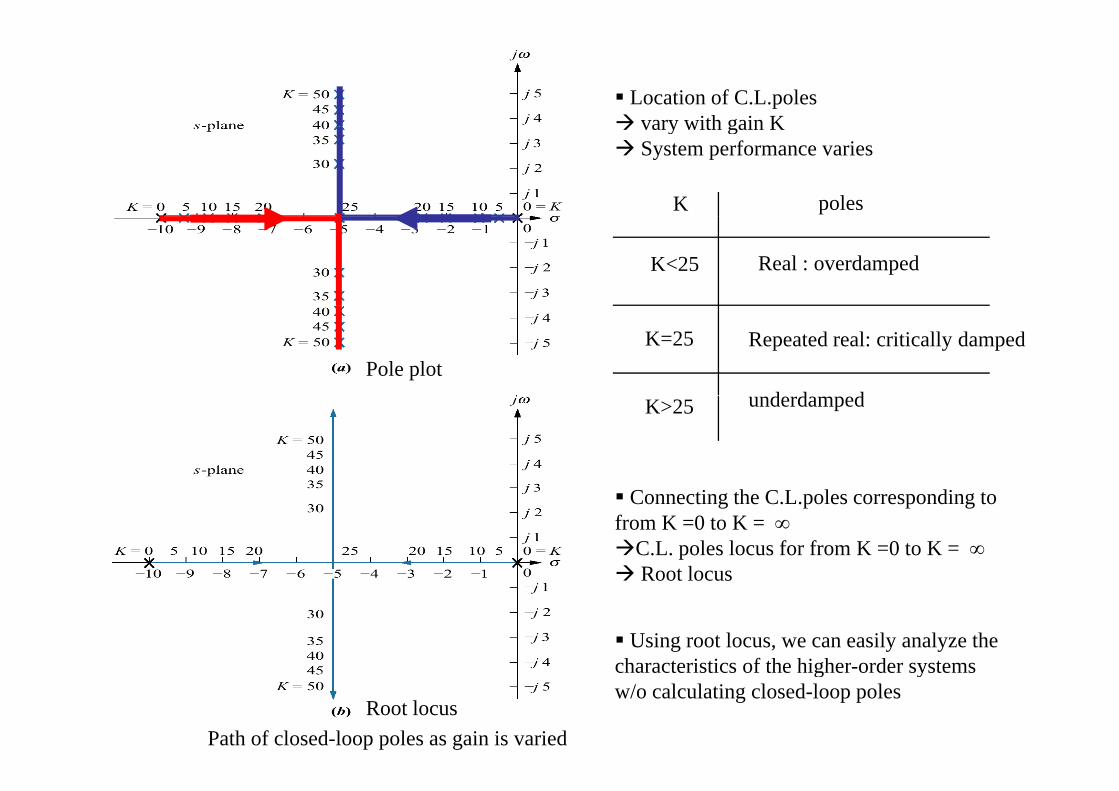
Location of C.L.polesvary with gain K
polesK
vary with gain KSystem performance varies
K<25 Real : overdamped
Pole plotK=25 Repeated real: critically damped
d d dK>25 underdamped
Connecting the C.L.poles corresponding to from K =0 to K = ∞
C.L. poles locus for from K =0 to K = ∞Root locusRoot locus
Using root locus, we can easily analyze the characteristics of the higher order systems
Root locusPath of closed-loop poles as gain is varied
characteristics of the higher-order systems w/o calculating closed-loop poles

Properties of Root Locus
Higher-order systems difficult to calculate the closed-loop pole location for various gain K’s.Using root locus, without solving denominator polynomial of closed loop TF, it is possible to
have rapid sketch of closed-loop poles location change for various gain K’s(root locus)
)()(1)()(
sHsKGsKGsT
+=C.L.T.F.
(root locus)
)()(1 sHsKG+
Characteristic equation (i.e. C.L. poles = the values that satisfy the characteristic equation
0)()(1 =+ sHsKGo180)12(11)()( +∠=−= ksHsKG L,3,2,1,0 ±±±=k
o180)12()()(∠ kHKG
1)()( =sHsKG
o180)12()()( +=∠ ksHsKG
1Any complex number s that
f h d)()(
1sHsG
K =
Angle condition ⇒ determines the root locus
satisfies these conditions⇒ closed-loop poles!
Angle condition ⇒ determines the root locusMagnitude condition ⇒ Determines the specific position corresponding to
specific value of K on the root locus

Ex)
)4)(3()()( ++=
ssKsHsKG )4)(3()( ssKsT ++=
Open-loop TF Closed-loop TF
)2)(1()()(
++=
sssHsKG
)122()73()1()( 2 KsKsK
sT+++++
=
jbIf a pole is a closed-loop pole for some value of gain K
t ti f djbas +=
)()(o180)12()()(∠ kHKGjbas += must satisfy and
Consider as the first test point 321 js +−=
1)()( =sHsKGo180)12()()( +=∠ ksHsKG
)()(∠ ∑∑ ltltlHKG
321 js +−=
o
oooo
55.70
43.1089057.7131.56
)()(
4321
11
−=
−−+=−−+=
−=∠ ∑∑θθθθ
polestoangleszerostoanglessHsKG
o180≠321 js +−= is not a closed-loop pole
What about )2/2(22 js +−= o180)()( 22 =∠ sHsKG
is a closed-loop pole for some value of gain K2
)2/2(22 js +−=
33.0)12.2)(22.1(
22)22.1(
2/222/21
2/22/21
4321
)()(1
22
22
22
==++
+−=
++++
=∏∏
==jj
jj
ssss
lengthzerolengthpole
sHsGK
is a closed-loop pole (i.e. is a point on the root locus) when K= 0.33)2/2(22 js +−=
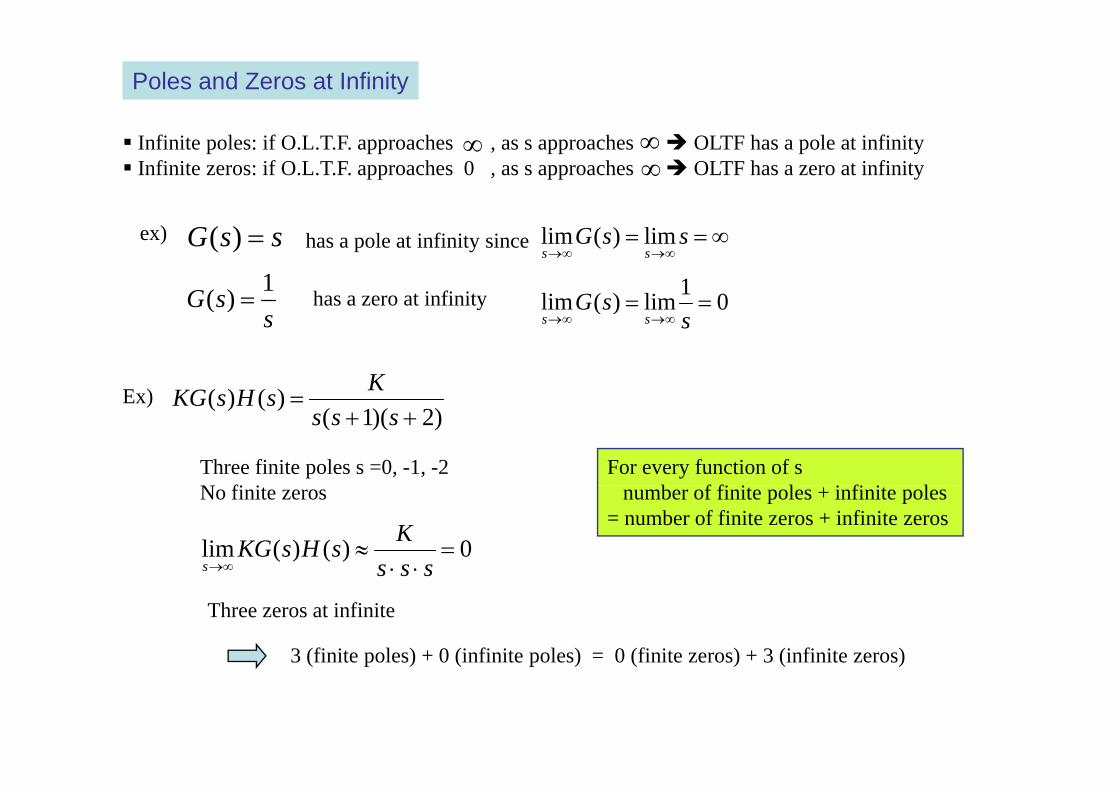
Poles and Zeros at Infinity
Infinite poles: if O.L.T.F. approaches , as s approaches OLTF has a pole at infinityInfinite zeros: if O.L.T.F. approaches 0 , as s approaches OLTF has a zero at infinity
∞ ∞∞
ssG =)(
sG 1)( =
has a pole at infinity since
has a zero at infinity
∞==∞→∞→
ssGsslim)(lim
01lim)(lim ==sG
ex)
ssG )( y
)()( KsHsKG
0lim)(lim ==∞→∞→ s
sGss
Ex)
For every function of sb f fi i l i fi i l
)2)(1()()(
++=
ssssHsKG
Three finite poles s =0, -1, -2N fi i
Ex)
number of finite poles + infinite poles = number of finite zeros + infinite zeros
No finite zeros
0)()(lim =⋅⋅
≈∞→ sss
KsHsKGs sss
Three zeros at infinite
3 (finite poles) + 0 (infinite poles) = 0 (finite zeros) + 3 (infinite zeros)( p ) ( p ) ( ) ( )

Sketching the Root Locus
1 Mark open loop poles with x’s and open loop zeros with o’sK=0~ 변할때 root locus가어떻게변하는지본다.∞
Shows how location of the CL poles move as K varies from 0 to ∞
1. Mark open loop poles with x s and open loop zeros with o s
K>0일때, 실수축상에서 Test point의오른쪽에있는 pole과 zero의수의합이홀수이면2. Draw root loci on the real-axis to the left of an odd number of real poles plus zeros
그점은 root loucs상에있다
3 Root locusstarts at (finite and infinite) open-loop poles
and
(i.e. K = 0)o180)12()()( +=∠ ksHsKGSatisfying the angle condition
3. Root locus
4 Draw the asymptote of root locus
andends at (finite and infinite) open-loop zeros
(i.e. K = )∞4. Draw the asymptote of root locus
a. Real-axis intercept or center of asymptote
zerosfinitepolesfinite −= ∑∑σ
zerosfinitepolesfinitea ## −σ
k 180)12( +=
o
θ 3210 ±±±=kb. 양의실수축과이루는각도
Note.Number of branches of the root locus = number of closed loop poles = system order
zerosfinitepolesfinitea ## −θ 3,2,1,0 ±±±k
- Number of branches of the root locus = number of closed-loop poles = system order(Branch: path that one pole traverse)
- The root locus is symmetrical about the real axis

)4)(3()()( ++=
ssKsHsKG
Open-loop TF
)2)(1()()(
++=
sssHsKG
Root locus starts at -1 and -2 meet between -1 and -2meet between -1 and -2break out into complex planereturn to real axis somewhere between -3 and -4ends at -3 and -4ends at 3 and 4

ex 8.2)Ends at zero t i fi it
1 Mark OL poles and zeros
at infinity
1. Mark OL poles and zeros2. Draw loci on real axis to the left of odd number3. Start at poles and end at zeros4. Draw asymptote
34
14)3()4210(
−=−−−−−
=aσ314 −
##180)12(
−+
=zerosfinitepolesfinite
kaθ
o 3/ππ
23/5103/
======
kforkforkfor
πππ
3/5π
Ends at zero at infinity
23/5 == kforπ
# of asymptotes = # finite poles - #finite zeros = 3# f b h # f CL l d 4# of branches = # of CL poles = system order = 4
Ends at zero at infinity
The root locus is symmetrical about the real axisCheck!
# infinite zeros (3) + #finite zero (1) = #finite poles (4)

Refining the Sketch(breakaway from real axis and move into the complex plane)
A. Real-axis Breakaway and Break-in Point
1σ−
2σ: Breakaway point: Break-in Point
As K increases2
Break-in and Breakaway angle :n
o180
n: # of CL poles arriving at or departing fromn: # of CL poles arriving at or departing from the BA or BI on the real axis
Two poles 90o at BATwo zeros 90o at BITwo zeros 90 at BI
Determine the location of BA and BI pointOn the real axis between open-loop poles, gain K is maximum at BA pointp p p g pOn the real axis between open-loop zeros, gain K is minimum at BI point
0=ddK
1
=σsds
σ is an either BA or BI point where
0)()(1 =+ sHsKGQ)()(1
sHsGK −= ( )
where
Characteristic equation

Ex))23(
)158()2)(1()5)(3()()( 2
2
+++−
=++−−
=ssssK
ssssKsHsKG
)())((
)158()23(
2
2
+++
−=ssssK
)158( +− ss
)82)(23()158)(32( 22 ++++ ssssssdK
)612611(
)158()82)(23()158)(32(
2
22
−−
+−−++−+−+
−===
σσσσ ss ss
ssssssdsdK
823451
0)158(
)612611(22 =
+−=
σσσσ
A d i82.3,45.1−=σ BA and BI point

B. j -Axis Crossingsω
A point on the root locus that separates the stable operation of the system from the
bl iunstable operation
A pole on j -axis at a certain gain KωA pole on j axis at a certain gain Kω
How to find the value of and K?ω
Method I) Substitute s = j directly into characteristic equationω
ωσ js +=(A pole on j -axisω0
)
Method II) Use Routh table A row of entire zeros of Routh table pole on j -axis possible ω

Ex) find the frequency and gain K for which the root locus crosses the imaginary axis.
KsKssssKsT
3)8(147)3()( 234 +++++
+=
C.L.T.F.
Method I) Characteristic equation:
)(
Method I)03)8(147 234 =+++++ KsKsss
q
S b tit t j i t h t i ti tiωAs j is a pole of closed-loop system, it must satisfy characteristic equationω
03))(8()(14)(7)( 234 =+++++ KjKjjj ωωωω
234
Substitute s = j into characteristic equationω
03))(8(147 234 =+++−− KjKj ωωωω
0314 24 =+− KωωReal part
0)8(7 3 =++− ωω KImaginary part
Solve for and Kω59.1±=ω
65.9=KRoot locus crosses j -axis at at a gain of
ω 59.1js ±=65.9=K

Method II) Use Routh tableKsKsss
sKsT3)8(147
)3()( 234 ++++++
=
No sign changes from s4 to s2
2 LHP l2 LHP poles2 remaining, but even polynomials of s2
requires symmetric poles2 poles should be on j -axis ω
Only s1 row can make all zero row 0720652 =+−− KK
p jω
65.9=KAssuming K>0, then
Form even polynomial using s2 row22 07.20235.8021)90( 22 =+=+− sKsK
59.1js ±=59.1j65.9=K
Root locus crosses j -axis at at a gain of
6590 <≤ KSystem is stable for
ω 59.1js ±=
59.1j−65.9=K
0=K0=K65.9=K
65.90 <≤ KSystem is stable for 59.1j65.9K

C. Angles of Departure and Arrival
Root locus starts at open-loop poles (ex. p1) and ends at finite and infinite open-loop zeros (ex. z2)For more accurate root locus, need to know the root locus departure angle from the complex poles
arrival angle to the complex zeros
If a complex number s1 is on root-locus and close ( ) to a complex pole p1, i.e. is one of the closed-loop poles, it must satisfy angle condition
ε
11
180)12(
)()(
+=
−=∠ ∑∑ok
polestoangleszerostoanglessHsKG
Test point
z2
541362
)(θθθθθθ −−−++=
ps1p1
if t t k th d t l f l lif want to know the departure angle from a complex pole p1
o180)12(543621 +−−−++= kθθθθθθ

C. Angles of Departure and Arrival
Root locus starts at open-loop poles (ex. p1) and ends at finite and infinite open-loop zeros (ex. z2)For more accurate root locus, need to know the root locus departure angle from the complex poles
arrival angle to the complex zeros
If a complex number s1 is on root-locus and close ( ) to a complex pole p1, i.e. is one of the closed-loop poles, it must satisfy angle condition
ε
11
180)12(
)()(
+=
−=∠ ∑∑ok
polestoangleszerostoanglessHsKGTest point
s1
541362
)(θθθθθθ −−−++=
if t t k th d t l f l l
1
if want to know the departure angle from a complex pole p1
o180)12(543621 +−−−++= kθθθθθθ
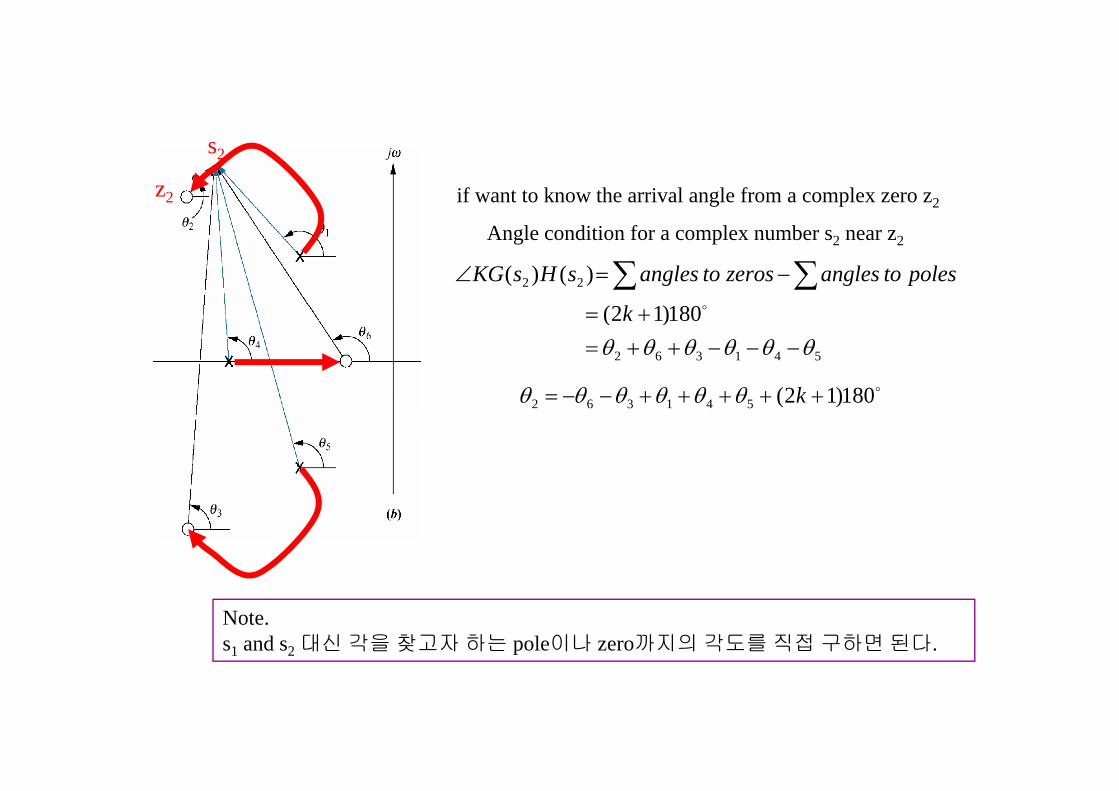
if want to know the arrival angle from a complex zero z2z2
s2
Angle condition for a complex number s2 near z2
22
180)12(
)()( −=∠ ∑∑ok
polestoangleszerostoanglessHsKG
o180)12( +++++= kθθθθθθ
541362
180)12(θθθθθθ −−−++=
+= ok
180)12(541362 +++++−−= kθθθθθθ
Note. s1 and s2대신각을찾고자하는 pole이나 zero까지의각도를직접구하면된다.

Ex) find the angle of departure from the complex poles and sketch the root locus
Open loop poles at -3, -1±j1
Departure angle from -1+j1
o180)12(4213 +=−−− kθθθθ
oo
o
1801tan901tan
180)12(
11
4231
⎟⎞
⎜⎛
⎟⎞
⎜⎛
+−−−=
−−
kθθθθ
o
o
41086.251
1802
tan901
tan
−=
−⎟⎠
⎜⎝
−−⎟⎠
⎜⎝
=
4.108=

D. Plotting and Calibrating the Root Locus
How to find exact point at which root locus satisfies certain conditions and the gain at that point?How to find exact point at which root locus satisfies certain conditions and the gain at that point?
Ex) Find exact point at which root locus crosses the 0.45 damping line and the gain at that point)3(K
Method I)
)4)(2)(1()3()()(+++
+=
sssssKsHsKG
θζ cos=
θ
θζ cos=
o25.63)45.0(cos 1 == −θ
On the line only a point with radius r = 0 747 satisfies angle condition450ζOn the line, only a point with radius r = 0.747 satisfies angle conditiono180)12()()( +=∠ ksHsKG
54312 θθθθθ −−−−=
45.0=ζ
lengthspolelengthszerosHsG
ps
zssHsG
i
n
j
i
m
i
∏∏
=⇒+∏
+∏=
=
= )()()(
)()()(
1
1
At that point, the corresponding gain 71.1)()(
1==
∏∏
==B
EDCAlengthzerolengthpole
sHsGK

Ex) Find exact point at which root locus crosses the 0.358 damping line and the gain at that pointMethod II)
)6)(4)(1(1)(
+++=
ssssG
2222
23
))((1
))((1
124101
)(1)(
)()(
ssssGsG
sRsC
ζ==
+++=
+=
2223
2222
)716.0()716.0(1
)716.0)(()2)((
nnnn
nnnn
sss
ssssss
αωωαωαω
ωωαωζωα
+++++=
++++++
o02.69)358.0(cos 1 == −θ
3580=ζ
⎪
⎪⎨
⎧
=+
=+
24716.0
10716.02nn
n
ωαω
αω8133.2=nω
3580=ζ 627200721 js ±=
358.0ζ
⎪⎩ =12
nαω358.0=ζ
CL pole pair on =0.358 damping lineζ180 69 02o
627.20072.1 jsd ±−=
θθABC
627.20072.11 2 jjs nn ±−=−±−= ζωζω ×××180-69.02o
-4 -1 0-6×
1θ2θ3θ
o180321 =−−− θθθCBAlengthzerolengthpole
sHsGK =
∏∏
==)()(
1

Comments
To be stableTo be stable⇒All C.L. poles must be in LHP
If#O.L. poles - #finite zeros ⇒ There is a vlue of the gain K beyond
3≥which root roci enter the RHP(i..e system becomes unstable)

Nonminimum-Phase SystemsSkip!
Minimum phase system: all the poles and zeros lie in LHP
Nonminimum phase system: at least one pole or zero lies in RHPNonminimum phase system: at least one pole or zero lies in RHP
)1()1()(
+−
=Tss
sTKsG a0&1)( >= aTsH)1( +Tss )( a
)1()1()(
+−
−∠=∠Tss
sTKsG a Phase shift ⇒ this is why it is called nonminimum phase
)12(180
180)1()1()(
o
o
+±=
++−
∠=
kTss
sTK a oo 02180)1()1(
=⋅±=+−
∠ kTss
sTK a
)12(180 +±= k
Locus Not on here!

Generalized Root Locus
So far, root locus as a function of the forward-path gain KHow to draw root locus for variations of other parameters? Ex) root locus for variations of the value of open loop pole p1?
10))(2(
10)()(1pss
sHsKG++
= gain K was a multiplying factor of the function but P1 is not.
Denominator of C.L.T.F. for a root locus for gain K variation )()(1 sHsKG+g
10)()( ==sKGsT
)()(1 1 sHsGp+
)()(
For a root locus for p1 variation, we need a CLTF denominator
)2(10210
102)2()()(1)(
12
112
++++=
++++=
+=
spss
pspssHsKGsT
Isolating p1 )2(102 1 ++++ spss
)2(102
102
+++= sp
ss
102)2(1 2
1
+++
+ss
sp
102)2()()( 2
1
+++
=ss
spsHsKGPath of closed loop poles
P1 is now a multiplying factor of the open loop transfer function
102)2()()( 2 ++
+=
ssssHsG
Path of closed loop poles as p1 is increased

Summary of the Steps for Constructing Root Loci
1. Convert into a form in which system parameter is a multiplying factor2. Locate the open-loop poles and zeros on the s-plane3. The branches start from open-loop poles and end at finite or infinite zerosp p p4. Draw the root locus on the real axis5. Determine the asymptotes of root locus6. Find the breakaway and break-in points7 D t i th l f d t / i l f /t l l /7. Determine the angle of departure/arrival from/to a complex pole/zero8. Find the points where the root loci may cross the imaginary axis9. Locate the closed-loop poles on the root locus and determine the corresponding gain K by
use of the magnitude conditiong

Root Locus for Positive-Feedback System
)()()()( sKGsT =
)()(1)(
sHsKG−
Positive feedback system
0)()(1 =− sHsKGA closed-loop pole s exist when
ksHsKG o36011)()( ∠== 3,2,1,0 ±±±=k
Angle condition for a root locus of positive feedback system kHKG o360)()(Angle condition for a root locus of positive feedback system ksHsKG 360)()( =
Rules for sketching root locusRead by yourself…