chapter 7 reasoning in uncertain situations
DESCRIPTION
Chapter 7 Reasoning in Uncertain Situations. Xiu-jun GONG (Ph. D) School of Computer Science and Technology, Tianjin University [email protected] http:// cs.tju.edu.cn/faculties/gongxj/course/ai /. Outline. Introduction Certainty Factor Bayesian Reasoning - PowerPoint PPT PresentationTRANSCRIPT

Chapter 7 Reasoning in Uncertain
Situations
Xiu-jun GONG (Ph. D)School of Computer Science and Technology, Tianjin
University
http://cs.tju.edu.cn/faculties/gongxj/course/ai/

Outline
Introduction
Certainty Factor
Bayesian Reasoning
Dempster-Shafer Theory of Evidence
Summary

Uncertain agent
environmentagent
sensors
actuators
??
??
?
model

Types of Uncertainty Uncertainty in prior knowledge
E.g., some causes of a disease are unknown and are not represented in the background knowledge of a medical-assistant agent
Uncertainty in actions Actions are represented with relatively short lists of
preconditions, while these lists are in fact arbitrary long. It is not efficient (or even possible) to list all the possibilities.
Uncertainty in perception E.g., sensors do not return exact or complete
information about the world; a robot never knows exactly its position.

Sources of uncertainty Epistemic uncertainty : subjective
uncertainty Aleatory uncertainty : Objective
uncertainty
What we call uncertainty is a summary of all that is not explicitly taken into account in the agent’s knowledge base.

Questions How to represent uncertainty in
knowledge?
How to perform inferences with uncertain knowledge?
Which action to choose under uncertainty?
Uncertainty Approaches in AI Quantitative
Probability Theory & Fuzzy logic Certainty Factors Bayesian Inference Dempster-Shafer evidence theory
Qualitative Logical Approaches
Reasoning by cases Non-monotonic reasoning
Hybrid approaches

Certainty Factors Certainty factors express belief in an event
Fact or hypothesis Based upon evidence
Experts assessment Composite number that can be used to
Guide reasoning Cause a current goal to be deemed
unpromising and pruned from search space Rank hypotheses after all evidence has been
considered

Certainty Factors for Evidence Certainty Factor cf(E) is a measure of how
confident we are in E Range from –1 to +1
cf=-1 very uncertain cf=+1 very certain cf=0 neutral
Certainty factors are relative measures Do not translate to measure of absolute
belief

CF for rules Certainty factors combine belief and
disbelief into a single number based on some evidence MB(H,E)-measure of belief in H given evidence
E MD(H,E)-measure of disbelief in H given
evidence E Strength of belief or disbelief in H depends
on the kind of evidence E observed cf(H,E)= MB(H,E) – MD(H,E)

Belief Positive CF implies evidence supports
hypothesis since MB > MD CF of 1 means evidence definitely
supports the hypothesis CF of 0 means either there is no evidence
or that the belief is cancelled out by the disbelief
Negative CF implies that the evidence favours negation of hypothesis since MB < MD

Stanford CF Algebra There are rules to combine CFs of several
evidences CF (E1 and E2) = MIN { CF(E1) , CF(E2) } CF (E1 or E2) = MAX { CF(E1) , CF(E2) }
cf(shep is a dog)=0.7 cf(shep has wings)=-0.5
cf(Shep is a dog and has wings) = min(0.7, -0.5)= -0.5cf(Shep is a dog or has wings) = max(0.7, -0.5)= 0.7

CF Inference Known CF(E) and CF(H,E), solve for CF(H)
otherwise
ECFifECFEHCFHCF
0
0)()(*),()( )0),(max{*),()( ECFEHCFHCF
Ex1: CF(cold , fever)=0.6, CF(fever)=0.7
then CF (cold)=0.6 * 0.7 =0.42
Ex2: CF(cold , fever)=0.6 , CF(fever)= - 0.8
then CF (cold)=0

CF Conjunctive RulesIF <evidence1>AND <evidence2>..AND <evidencen>THEN
<hypothesis H> {cf}
cf(H, E1 E2 … En) = min[cf(E1),cf(E2)…cf(En)] x cf

CF: Disjunctive RulesIF <evidence1>OR <evidence2>..OR <evidencen>THEN
<hypothesis H> {cf}
cf(H, E1 E2 … En) = max[cf(E1),cf(E2)…cf(En)] x cf

Bayesian Network
Visit Asia
Tuberculosis
Tuberculosisor Cancer
XRay Result Dyspnea
BronchitisLung Cancer
Smoking
Patient Information
Medical Difficulties
Diagnostic Tests
Medical DifficultiesTub or Can
True
True
False
False
Bronchitis
Present
Absent
Present
Absent
Present
0.90
0.70
0.80
0.10
Absent
0.l0
0.30
0.20
0.90
Dyspnea
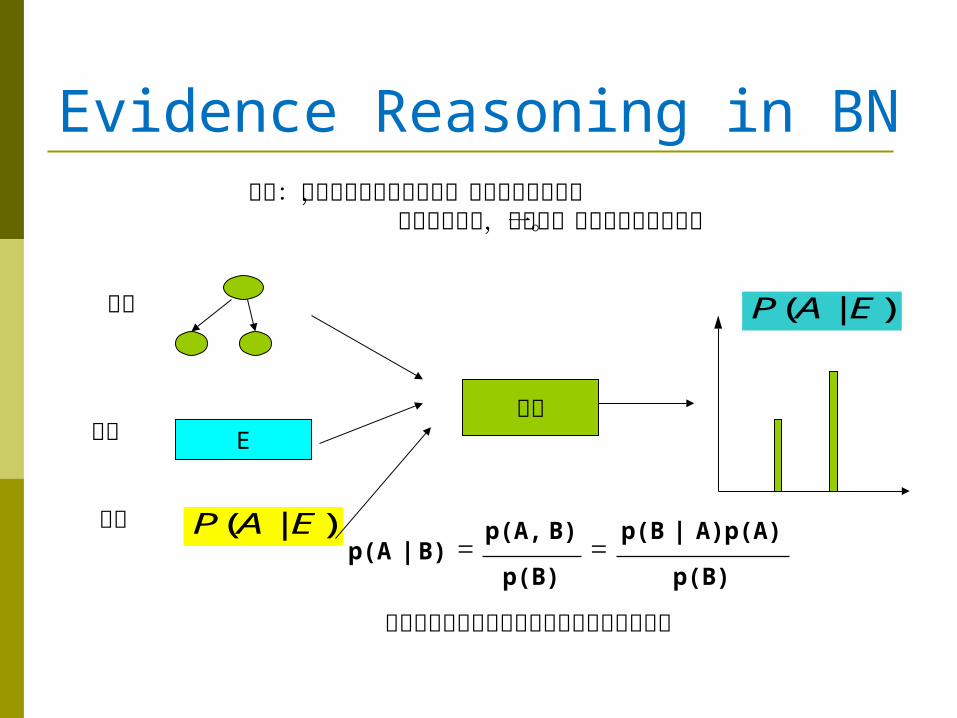
Evidence Reasoning in BN目的:通过联合概率分布公式,在给定的网络结构 和已知证据下,计算某一事件的发生的概率。
E
)|( EAP
网络
证据
查询
推理
)|( EAP
贝叶斯推理可以在反复使用贝叶斯规则而获得
p(B)
A)p(A)|p(B
p(B)
B)p(A,B)|p(A
Inference Methods Exact reasoning
网络的拓扑结构是推理复杂性的主要原因; 当前的一些精确算法是有效地,能够解决现实中的大
部分问题 由于对知识的认知程度,精确推理还存在一些问题
Approximate reasoning 证据的低似然性和函数关系 是近似推理中复杂性的主
要原因

Dempster-Shafer Theory The D-S theory is a mathematical theory of
evidence based on belief functions and plausible reasoning
Why we need D–S theory Ignorance: toss a coin for probability
No information for the coin: 0.5 head, 0.5 tail Known that the coin is fair: 0.5 head, 0.5 tail
Ignorance: toss a coin for probability No information for the coin: B(H)=0, B(T)=0. Known that the coin is fair: B(H)=0.5, B(T)=0.5.
Probabilities on a set which is related to a set of situations

Components of DST
Basic probability assignment (m)
Belief and Plausibility measures
Let X be the universal set: the set of all states under consideration. 2X is the power set of X

Rules of Combination to combine two independent sets of mass
assignments m1,m2:
Where K is a measure of the amount of conflict between the two mass sets
Discussion on D-S Many of the criticisms of D-S have rejected the
theory on the basis of the Dempster rule of combination.
There are many ways to combine evidence in D-S. The critical concern for the selection of a
combination operation is the nature of conflict and how it is handled by a particular combination rule.

Summary Most of situations are uncertainty in
nature
Certainty Factor
Bayesian Reasoning
Dempster-Shafer Theory of Evidence