chapter 4 –hydrostatics - · pdf file1 lecturenotes ttk 4190 guidance and control of...
TRANSCRIPT

1 Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Chapter 4 – Hydrostatics
4.1RestoringForcesforUnderwaterVehicles4.2RestoringForcesforSurfaceVessels4.3LoadConditionsandNaturalPeriods4.4BallastSystems
Archimedes(287-212BC)derivedthebasiclawsoffluidstaticswhicharethefundamentalsofhydrostaticstoday.
Inhydrostaticterminology,thegravitationalandbuoyancyforcesarecalledrestoringforces,andtheyareequivalenttothespringforcesinamass-damper-springsystem.

2
M!! " C!!"! " D!!"! " g!"" " go # # " #wind " #wave
M ! MRB "MA - system inertia matrix (including added mass)C!!" ! CRB!!" " CA!!" - Coriolis-centripetal matrix (including added mass)D!!" - damping matrixg!"" - vector of gravitational/buoyancy forces and momentsgo - vector used for pretrimming (ballast control)# - vector of control inputs#wind - vector of wind loads#wave - vector of wave loads
6-DOFequationsofmotion
Chapter 4 – Hydrostatics
BallastcontrolGravitational/buoyancyterms
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Inthederivationoftherestoringforcesandmomentswewilldistinguishbetweentwocases:
• Section4.1Underwatervehicles(ROVs,AUVsandsubmarines)• Section4.2Surfacevessels(ships,semi-submersiblesandhigh-speedcraft)
3
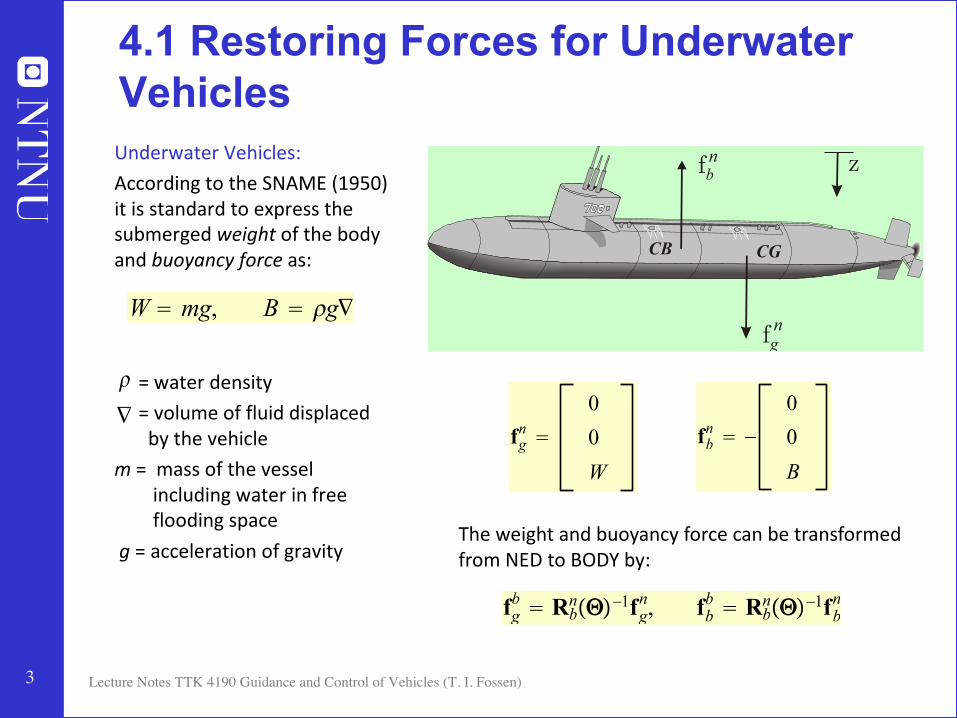
UnderwaterVehicles:AccordingtotheSNAME(1950)itisstandardtoexpressthesubmergedweight ofthebodyandbuoyancyforce as:
=waterdensity=volumeoffluiddisplacedbythevehicle
m =massofthevesselincludingwaterinfreefloodingspace
g =accelerationofgravity
z
fg
CGCB
fb
n
n
4.1 Restoring Forces for Underwater Vehicles
W ! mg, B ! !g!
fgn !
00W
fbn ! !
00B
TheweightandbuoyancyforcecanbetransformedfromNEDtoBODYby:
fgb ! Rbn!!"!1fg
n, fbb ! Rbn!!"!1fb
n
!
!
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
4
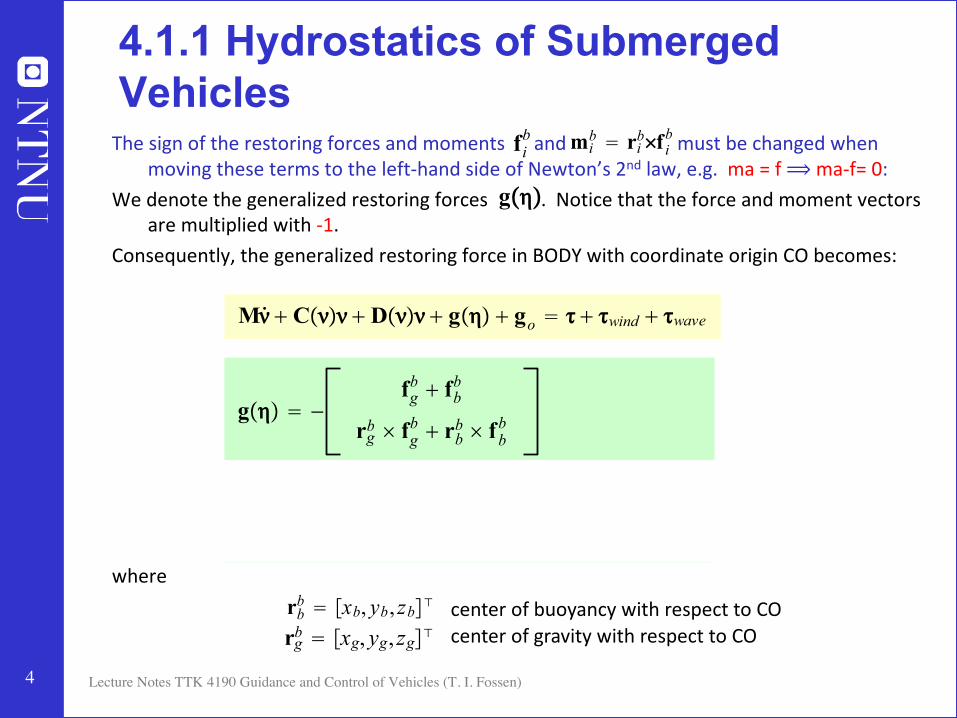
Thesignoftherestoringforcesandmomentsandmustbechangedwhenmovingthesetermstotheleft-handsideofNewton’s2nd law,e.g.ma=f⟹ma-f=0:
Wedenotethegeneralizedrestoringforces . Noticethattheforceandmomentvectorsaremultipliedwith-1.
Consequently,thegeneralizedrestoringforceinBODYwithcoordinateoriginCObecomes:
where
4.1.1 Hydrostatics of Submerged Vehicles
g!!" ! !fgb " fb
b
rgb ! fgb " rbb ! fb
b
! !Rbn!""!1!fg
n " fbn"
rgb ! Rbn!""!1fgn " rbb ! Rbn!""!1fb
n #
mib ! rib!f ibfi
b
g!!"
rbb ! !xb, yb, zb"! centerofbuoyancywithrespecttoCOcenterofgravitywithrespecttoCOrgb ! !xg, yg,zg"!
M!! " C!!"! " D!!"! " g!"" " go # # " #wind " #wave #
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

5
MainResult:UnderwaterVehicles:
The6-DOFgravityandbuoyancyforcesandmomentsaboutCOaregivenby:
4.1.1 Hydrostatics of Submerged Vehicles
g!!" !
!W ! B" sin!! !W ! B" cos! sin"! !W ! B" cos! cos"! !ygW ! ybB" cos ! cos" " !zgW ! zbB" cos! sin"
!zgW ! zbB" sin ! " !xgW ! xbB" cos! cos"
! !xgW ! xbB" cos ! sin" ! !ygW ! ybB" sin!
z
fg
CGCB
fb
n
n
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Copyright © Bjarne Stenberg/NTNU

6
Example4.1:NeutrallyBuoyantUnderwaterVehicles:LetthedistancebetweenthecenterofgravityCGandthecenterofbuoyancyCB bedefinedbythevector:
ForneutrallybuoyantvehiclesW=B,andthissimplifiesto:
AnevensimplerrepresentationisobtainedforvehicleswheretheCGandCB arelocatedverticallyonthez-axis,thatisxb =xg andyg =yb.Thisyields:
4.1.1 Hydrostatics of Submerged Vehicles
BG ! !BGx, BGy, BGz"! ! !xg ! xb, yg ! yb, zg ! zb"!
g!!" !
000
!BGyW cos! cos" "BGzW cos! sin"BGzW sin! "BGxW cos! cos"!BGxW cos ! sin" !BGyW sin !
g!!" ! 0, 0, 0, BGzW cos!sin", BGzW sin!, 0!
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

7
Forsurfacevessels,therestoringforceswilldependonthecraft'smetacentricheight,thelocationoftheCG andtheCB aswellastheshapeandsizeofthewaterplane.LetAwp denotethewaterplaneareaand:
GMT =transversemetacentricheight(m)GML =longitudinalmetacentricheight(m)
ThemetacentricheightGMi wherei={T,L}isthedistancebetweenthemetacenterMiandCG.
4.2 Restoring Forces for Surface Vessels
Definition4.1(Metacenter):ThetheoreticalpointMi atwhichanimaginaryverticallinethroughtheCBintersectsanotherimaginaryverticallinethroughanewCBcreatedwhenthebodyisdisplaced,ortilted,inthewater.
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

8
isthewaterplaneareaofthevesselasafunctionoftheheaveposition
Forafloatingvesselatrest,buoyancyandweightareinbalancesuchthat:
z=displacementinheavez=0 istheequilibriumposition
Thehydrostaticforceinheaveisrecognizedasthedifferenceofthegravitationalandbuoyancyforces:
4.2.1 Hydrostatics of Floating Vessels
mg ! !g!
Z ! mg ! !g!" " ""!z""! !!g""!z" #
wherethechangeindisplacedwateris:
!!!z" ! "0
z Awp!""d"
Awp!!"
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
B moves to B1 when the hullis rotated a roll angle f.G is fixed (rigid body).

9
Forconventionalrigsandshipswithbox-shapedwallsitcanbeassumedthat:
Thisexpressionisconstantforsmallperturbationsinz.Hence,therestoringforceZ willbelinear inz,thatis:
4.2.1 Hydrostatics of Floating Vessels
Z ! "!gAwp!0"Zzz
Awp!!" ! Awp!0"
Z
zAwp!z"
This is physically equivalent to a spring with stiffness Zz ! !!gAwp!0" and position z.
!frb ! Rbn!!"!1
00
!"g "0
z Awp!#"d#
TherestoringforcesandmomentsdecomposedinBODY:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
10
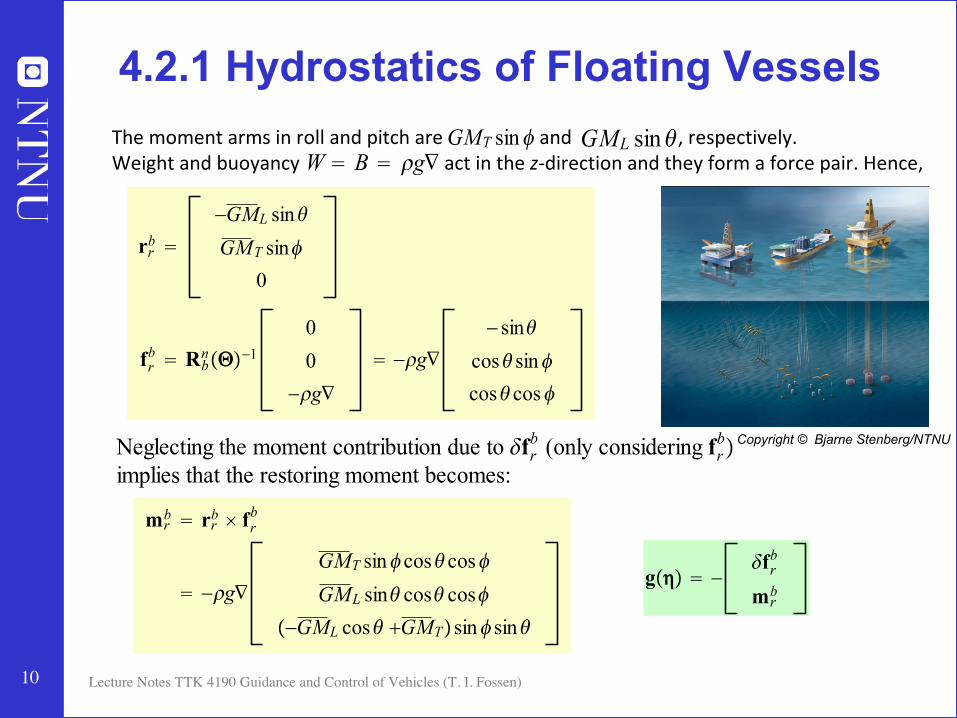
Themomentarmsinrollandpitchare and,respectively.Weightandbuoyancyactinthe z-directionandtheyformaforcepair.Hence,
4.2.1 Hydrostatics of Floating VesselsGMT sin! GML sin !
W ! B ! !g!
rrb !
!GML sin !GMT sin"
0
frb ! Rbn!!"!1
00
!#g"! !#g"
! sin!cos ! sin"cos ! cos"
#
#
Neglecting the moment contribution due to !frb (only considering fr
b!implies that the restoring moment becomes:
mrb ! rrb ! fr
b
! !"g"GMT sin#cos $cos#GML sin$ cos$ cos#
!!GML cos $ "GMT"sin#sin $ #
g!!" ! !!frb
mrb
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Copyright © Bjarne Stenberg/NTNU

11
4.2.1 Hydrostatics of Floating Vessels
g!!" !
!!g "0
zAwp!""d" sin #
!g "0
z Awp!""d" cos # sin$
!g "0
z Awp!""d" cos #cos$
!g#GMT sin$cos #cos$!g#GML sin# cos# cos$
!g#!!GML cos # "GMT" sin$ sin#
MainResult:SurfaceVessels:
6-DOFgeneralizedgravityandbuoyancyforces:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

12
Linear(SmallAngle)TheoryforBoxed-ShapedVesselsAssumesthat aresmallsuchthat:
4.2.2 Linear (Small Angle) Theory for Boxed-Shaped Vessels
g!!" ! G!
g!!" !
"!gAwp!0" z"
!gAwp!0" z#
!gAwp!0" z
!g#GMT #
!g#GML "
!g#!"GML!GMT" #"
!
00
!gAwp!0"z
!g#GMT#
!g#GML"
0
sin! ! !, cos! ! 1sin" ! ", cos" ! 1
!0
z Awp!!"d! " Awp!0"z
!, ", z
G ! diag!0, 0, !gAwp"0#, !g!GMT, !g!GML, 0$
M!" #N! #G$ % & # go #w
Linearkinetics:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

13
4.2.2 Linear (Small Angle) Theory for Boxed-Shaped VesselsThediagonalGmatrixisbasedontheassumptionofyz-symmetry(fore-aftsymmetry).IntheasymmetricalcaseG takestheform(noticethetwoadditionalcouplingtermsG35 =G53):
where
G ! G! !
0 0 0 0 0 00 0 0 0 0 00 0 !Zz 0 !Z! 00 0 0 !K" 0 00 0 !Mz 0 !M! 00 0 0 0 0 0
" 0
! Zz ! !gAwp!0"
! Z" ! !g " "AwpxdA
! Mz ! !Z"
! K# ! !g#!zg ! zg" " !g " "Awpy2dA ! !g#GMT
! M" ! !g#!zg ! zb" " !g " "Awpx2dA ! !g#GML
#
#
#
#
#
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
ThecouplingtermsdependonthelocationofCO

14
4.2.3 Computation of Metacenter Height for Surface Vessels
MetacenterM,centerofgravityG andcenterofbuoyancyB forasubmergedandafloatingvessel.ThereferenceisthekeellineK.
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

15
Forsmallrollandpitchanglesthetransverseandlongitudinalradiusofcurvaturecanbeapproximatedby:
wherethemomentsofareaaboutthewaterplanearedefinedas:
4.2.3 Computation of Metacenter Height for Surface Vessels
GMT ! BMT ! BG, GML ! BML ! BG
K
M
B
G
BMT ! IT! , BML ! IL
!
IL ! ! !Awpx2dA, IT ! ! !
Awpy2dA
ForconventionalshipsanupperboundontheseintegralscanbefoundbyconsideringarectangularwaterplaneareaAwp=BL whereB andL arethebeamandlengthofthehullupperboundedby:
IL ! 112 L
3B, IT ! 112 B
3L
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
ThemetacenterheightM canbecomputedbyusingbasichydrostatics:

16
Definition4.2(MetacenterStability):Afloatingvesselissaidtobe:
Transversemetacentrically stable ifGMT≥GMT,min >0
Longitudinalmetacentrically stable if GML≥GML,min >0
Thelongitudinalstabilityrequirementiseasytosatisfyforshipssincethepitchingmotionisquitelimited.ThiscorrespondstoalargeGMLvalue.
Thelateralrequirement,however,isanimportantdesigncriterionusedtoprescribesufficientstabilityinrolltoavoidthatthevesseldoesnotrollaround. Thevesselmustalsohavedamagestability(stabilitymargins)incaseofaccidents.
Typically,inroll GMT,min >0.5m whileinpitch GML,min ismuchlarger(morethan100.0m)
Atrade-offbetweenstabilityandcomfortshouldbemadesincealargestabilitymarginwillresultinlargerestoringforceswhichcanbequiteuncomfortableforpassengers(themechanicalequivalentisastiffspring).
4.2.3 Computation of Metacenter Height for Surface Vessels
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

17
Theloadcondition willdeterminetheheave,rollandpitchperiodsofamarinecraft.Theloadconditionvariesovertime(duetoloading,offloading,fuelburning,watertanks,etc.)
Inalinearsystem,thenaturalperiodswillbeindependentonthecoordinateoriginiftheyarecomputedusingthe6-DOFcoupledequationsofmotion.Thisisduetothefactthattheeigenvaluesofalinearsystemdonotchangewhenapplyingasimilaritytransformation!
1-DOFDecoupledAnalysis(NaturalPeriods)ThedecouplednaturalperiodsshouldbecomputedinCFusingthedecoupledequationsofmotion.Ifnot,theresultscanbeverywrongsincetheeigenvaluesofthedecoupledequationsdependonthecoordinateoriginasopposedtothe6-DOFcoupledsystem
4.3 Load Conditions and Natural Periods
!heave !C33
m " A33!!heave", Theave ! 2"
!heave
!roll !C44
Ix " A44!!roll", Troll ! 2"
!roll
!pitch !C55
Iy " A55!!pitch", Tpitch ! 2"
!pitch
#
#
#
Mustbesolvedbyiterationsinceaddedmassisafunctionoffrequency.Thisgivesanimplicitequationforfrequency.
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
18
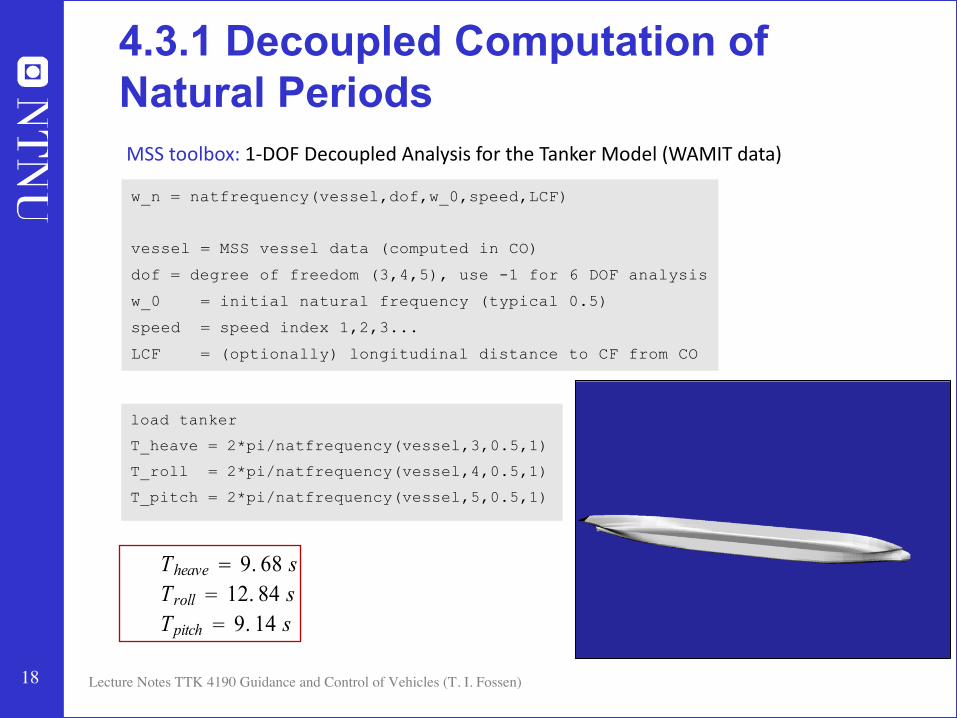
4.3.1 Decoupled Computation of Natural PeriodsMSStoolbox:1-DOFDecoupledAnalysisfortheTankerModel(WAMITdata)
Theave ! 9. 68 sTroll ! 12. 84 sTpitch ! 9. 14 s
w_n ! natfrequency(vessel,dof,w_0,speed,LCF)
vessel ! MSS vessel data (computed in CO)
dof ! degree of freedom (3,4,5), use -1 for 6 DOF analysis
w_0 ! initial natural frequency (typical 0.5)
speed ! speed index 1,2,3...
LCF ! (optionally) longitudinal distance to CF from CO
load tanker
T_heave ! 2*pi/natfrequency(vessel,3,0.5,1)
T_roll ! 2*pi/natfrequency(vessel,4,0.5,1)
T_pitch ! 2*pi/natfrequency(vessel,5,0.5,1)
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

19
6-DOFCoupledAnalysis(NaturalPeriods)Inthe6-DOFcoupledcaseafrequency-dependentmodalanalysiscanbeusedtocomputethenaturalfrequencies:
Assumethatthefloatingvesselcarriesoutharmonicoscillations
Then
Theundamped system()representsafrequency-dependenteigenvalueproblem:
4.3.2 Computation of Natural Periods in a 6-DOF Coupled System
Theeigenvalues mustbecomputedforallfrequencies
! ! cos!!t"i, i ! #1,1,1,1,1,1$! #
! ! "2 #
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
M!!"!" ! D!!"!# ! G! " 0 # M!!" ! MRB " A!!"D!!" ! B!!" " BV!!" " Kd
G ! C " Kp
# # #
!G ! !2M"!# ! j!D"!#$a ! 0 #
D!!" ! 0
|G !! iM!""| ! 0 #
20
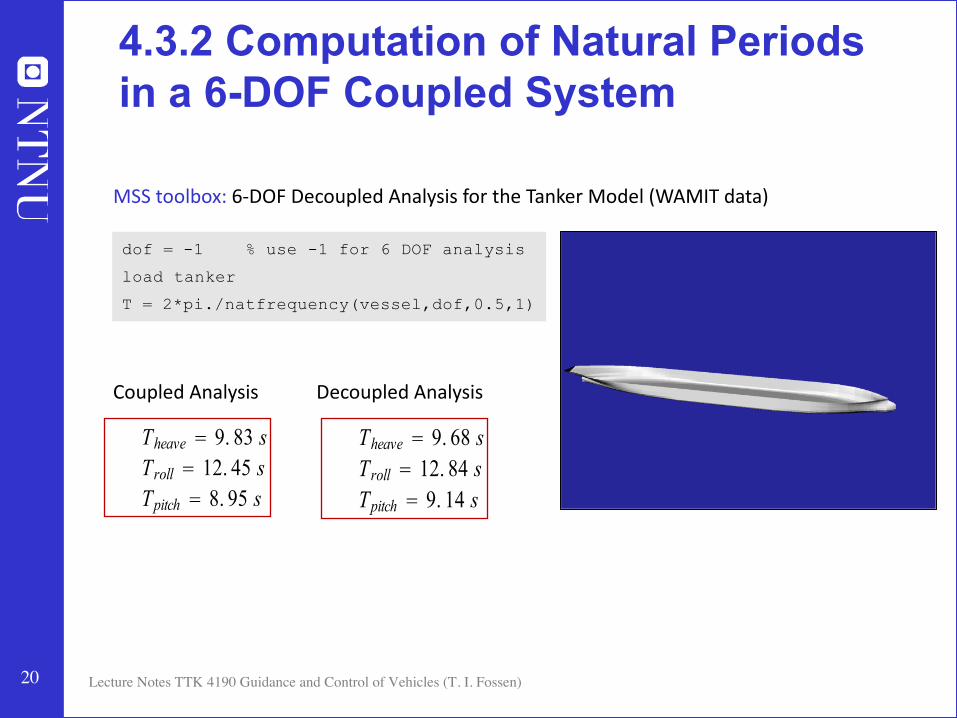
4.3.2 Computation of Natural Periods in a 6-DOF Coupled System
MSStoolbox:6-DOFDecoupledAnalysisfortheTankerModel(WAMITdata)
Theave ! 9. 68 sTroll ! 12. 84 sTpitch ! 9. 14 s
dof ! -1 % use -1 for 6 DOF analysis
load tanker
T ! 2*pi./natfrequency(vessel,dof,0.5,1)
Theave ! 9. 83 sTroll ! 12. 45 sTpitch ! 8. 95 s
CoupledAnalysisDecoupledAnalysis
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

21
4.3.2 Computation of Natural Periods in a 6-DOF Coupled System
MSStoolbox:
Theave ! 2! m " A33!"heave"#gAwp!0"
Troll ! 2! Ix " A44!"roll"#g!GMT
Tpitch ! 2! Ix " A55!"pitch"#g!GML
#
#
#
loadcond(vessel)
R55 ! R66 ! 0.25LppR44 ! 0.37B
Offshorevessels:
R55 ! R66 ! 0.27LppR44 ! 0.35BTankers:
Ix ! mR442
Iy ! mR552
Iz ! mR662
# # #
Therollperiodclearlydependontheloadcondition—thatis,addedmomentofinertiaA44,massm radiusofgyrationR44 andmetacentricheightGMT
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Radiusofgyration
Whathappensifyouincreasethemass?

22
Damped Harmonic Oscillator (Linear 2nd-order ODE without Forcing)
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Relative damping ratio
Solution:
1) Will a ship oscillate with ω0when excited by regular waves?
2) Will the ship oscillate at different frequencies in 6 DOF?
Natural frequency (undamped angular frequency)
For ships we add waves as forcing

23
Forced Harmonic Oscillator
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Comments: Resonance at ω/ω0 = 1.0
Marin craft oscillates at ω and not ω0 in all DOF when sufficient excited (fully developed sea with peak frequency ω)
Before “fully excited” the craft can oscillate with different frequencies in all DOF
Steady-state variation of amplitude with relative frequency ω/ω0 and damping ζ of a forced harmonic oscillator.
Phase:
Impedance:

24
4.3.2 Computation of Natural Periods in a 6-DOF Coupled SystemManyshipsareequippedliquidtankslikeballast andanti-rolltanks.Apartiallyfilledtankisknownasaslacktankandinthesetankstheliquidcanmoveandendangertheshipstability.
Thereductionofmetacentric heightGMT causedbytheliquidsinslacktanksisknownasthefree-surface-effect.
Themassoftheliquidorthelocationofthetanksplaynorole,onlythemomentofinertiaofthesurfaceaffectsstability.
The effectivemetacentric heightcorrectedforslacktanksfilledwithseawateris
Free-surface-correction(FSC)forNtanks
Rectangulartankwithlengthl inthex-directionandwidthb inthey-direction
GMT,eff ! GMT ! FSC #
FSC ! !r!1
N!m ir #
ir ! lb3
12 #
ir isthemomentofinertiaofthewatersurface
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

25
4.3.2 Computation of Natural Periods in a 6-DOF Coupled SystemThemetacentric heightGMT isreducedonboardashipifapayloadwithmassmp isliftedupandsuspendedattheendofaropeoflengthh.
The effectivemetacentric heightis
wherem isthemassofthevessel.
GMT,eff ! GMT ! hmpm #
Thedestabilizingeffectappearsimmediatelyafterraisingtheloadsufficientlytoletitmovefreely
p
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
26
M !! " C!!"! " D!!"! " g!"" " go # # " #wind " #wavew
#
Afloatingorsubmergedvesselcanbepretrimmed bypumpingwaterbetweentheballasttanksofthevessel.Thisimpliesthatthevesselcanbetrimmedinheave,pitchandroll:
4.4 Ballast Systems
z ! zd, ! ! !d, " ! "d 3modeswithrestoringforceandmoments
Steady-statesolution:
XX X
!d ! !!,!,!,zd,!d, "d,!"!where
Theballastvectorgo iscomputedbyusinghydrostaticanalyses(steady-statecondition).
mainequationforballastcomputationsg!!d" ! go " w #
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

27
Consideramarinecraftwithn ballasttanksofvolumesVi≤Vi,max (i=1,…,n)
Foreachballasttankthewatervolumeisgivenbytheintegral
4.4 Ballast Systems
Vi!hi" ! !o
hi Ai!h"dh " Aihi, (Ai!h" ! constant)
Zballast ! !i!1n Wi ! !g!i!1
n Vi
ThegravitationalforceinheaveduetoWi is:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Copyright © Bjarne Stenberg/NTNU
28
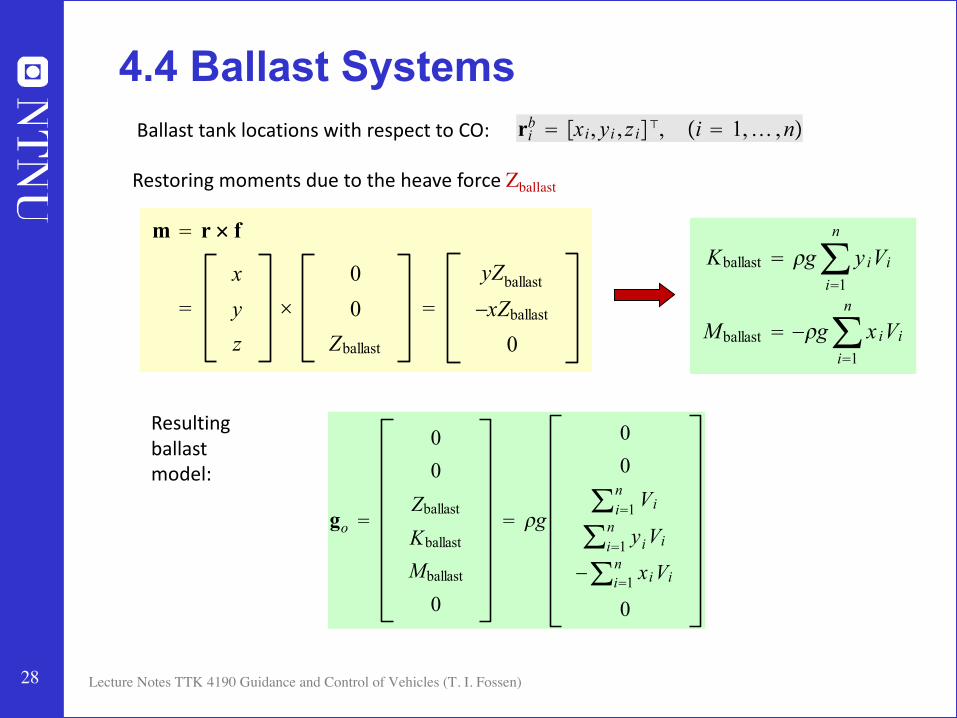
4.4 Ballast Systems
RestoringmomentsduetotheheaveforceZballast
rib ! !xi, yi , zi"!, #i ! 1," ,n$BallasttanklocationswithrespecttoCO:
Kballast ! !g!i!1
n
y iVi
Mballast ! "!g!i!1
n
x iVi
#
#
m ! r ! f
!
xyz
!
00
Zballast
!
yZballast
!xZballast
0
#
go !
00
ZballastKballastMballast
0
! !g
00
! i!1n Vi
!i!1n yiVi
"!i!1n xiVi0
Resultingballastmodel:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

29
G!3,4,5"!d!3,4,5" ! go!3,4,5" " 0
#
!Zz 0 !Z!0 !K" 0
!Mz 0 !M!
zd"d!d
! #g
!"i"1n Vi
!"i"1n yiVi
"i"1n xiVi
" 0
#
Trimmingisusuallydoneundertheassumptionsthatandaresmallsuch:
4.4.1 Conditions for Manual Pretrimming
Reduced-ordersystem(heave,roll,andpitch):
!d !d
g!!d" ! G!d
Steady-statecondition: Thisisasetoflinear
equationswherethevolumesVi canbefoundbyassumingthatw=0(zerodisturbances)
G!3,4,5" !
!Zz 0 !Z!0 !K" 0
!Mz 0 !M!
go!3,4,5" ! !g
!"i!1n Vi
!"i!1n yiVi
"i!1n xiVi
!d!3,4,5" ! #zd,!d,"d $!
w!3,4,5" ! #w3,w4,w5$!
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

30
Assumethatthedisturbancesinheave,roll,andpitchhavezeromeans.Consequently:
and
4.4.1 Conditions for Manual Pretrimming
!Zz 0 !Z!0 !K" 0
!Mz 0 !M!
zd"d!d
!
#g"i!1n Vi " w3
#g"i!1n yiVi " w4
!#g"i!1n xiVi " w5
! ! H!y ! H"!HH""!1y
ThewatervolumesVi isfoundbyusingthepseudo-inverse:
!g1 ! 1 1y1 ! yn!1 yn!x1 ! !xn!1 !xn
V1V2"
Vn
!
!Zzzd ! Z""d!K##d!Mzzd ! M""d
H! ! y"
#
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
w!3,4,5" ! #w3,w4,w5$! ! 0
Courtesy to SeaLaunch

31
Example4.3(Semi-SubmersibleBallastControl) Considerasemi-submersiblewith4ballasttankslocatedatInaddition,yz-symmetryimpliesthat
4.4.1 Conditions for Manual Pretrimming
P P
PP
P P
V1 V2
V4 V3
xb
yb
O
p1
p2
p3+
+
+
r1b ! !!x,!y", r2b ! !x, !y",r3b ! !x, y",r4b ! !!x,y"Z! ! Mz ! 0
H ! !g1 1 1 1!y !y y yx !x !x x
y !
!Zzzd!K""d!M##d
!
!gAwp!0"zd!g"GMT"d!g"GML#d
! "
V1V2V3V4
! 14!g
1 ! 1y 1x
1 ! 1y ! 1x1 1
y ! 1x1 1
y1x
!gAwp!0"zd!g"GMT"d!g"GML#d
! ! H!y ! H"!HH""!1y
Inputs: zd ,!d," d
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

32
4.4.2 Automatic Pretrimming using Feedback from z, φ and θInthemanualpretrimming caseitwasassumedthatw{3,4,5}=0.Thisassumptioncanberelaxedbyusingfeedback.
Theclosed-loopdynamicsofaPIDcontrolledwaterpumpcanbedescribedbya1st-ordermodelwithamplitudesaturation:
Tj (s) isapositivetimeconstantpj (m³/s)isthevolumetricflowratepumpjpdj isthepumpset-point.
Thewaterpumpcapacityisdifferentforpositiveandnegativeflowdirections:
Tjp! j " pj # sat!pdj"
sat!pdj" !
pj,max" pj # pj,max"
pdj pj,max! " pdj " pj,max"
pj,max! pdj $ pj,max!
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)

33
Example4.4(Semi-SubmersibleBallastControl,Continues):Thewaterflowmodelcorrespondingtothefigureis:
4.4.2 Automatic Pretrimming using Feedback from z, φ and θ
V! 1 " !p1V! 2 " !p3V! 3 " p2 # p3V! 4 " p1 ! p2
Tp! " p ! sat!pd"#! ! Lp
# #
! "
V1V2V3V4
, p "
p1p2p3
, L "
!1 0 00 0 !10 1 11 !1 0
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Copyright © Bjarne Stenberg/NTNU

34
4.4.2 Automatic Pretrimming using Feedback from z, φ and θFeedbackcontrolsystem:
Hpid!s" ! diag#h1,pid!s", h2,pid!s", . . . ,hm,pid!s"$
Tp! " p ! sat!pd"#! ! Lp
# #
Equilibriumequation:
Dynamics:
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
G!3,4,5"!!3,4,5" ! go!3,4,5"#"$ " w!3,4,5" #
pd ! Hpid!s"G#3,4,5$ !d#3,4,5$ ! !#3,4,5$ #
Courtesy to SeaLaunch

35
Anexampleofahighlysophisticatedpretrimming systemistheSeaLaunch trimand heelcorrectionsystem (THCS):
4.4.2 Automatic Pretrimming using Feedback from z, φ and θSeaLaunch:
Thissystemisdesignedsuchthattheplatformmaintainsconstantrollandpitchanglesduringchangesinweight.Themostcriticaloperationiswhentherocketistransportedfromthegarageononesideoftheplatformtothelaunchpad.Duringthisoperationthewaterpumpsoperateattheirmaximumcapacitytocounteracttheshiftinweight.
Afeedbacksystemcontrolsthepumpstomaintainthecorrectwaterlevelineachofthelegsduringtransportationoftherocket
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Courtesy to SeaLaunch
http://www.sea-launch.com
36
4.4.2 Automatic Pretrimming using Feedback from z, φ and θSeaLaunch Trim and Heel Correction System (THCS)
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Courtesy to SeaLaunch

37
4.4.2 Automatic Pretrimming using Feedback from z, φ and θ
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Courtesy to SeaLaunch

38
SMMarine Segment
4.4.2 Automatic Pretrimming using Feedback from z, φ and θ
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Courtesy to SeaLaunch

39
0 187.5 375 562.5 750 937.5 1125 1312.5 150021.5
10.5
00.5
11.5
22.5
33.5
44.5
55.5
6
Roll and pitch during launch time (secs)
roll
and
pitc
h (d
eg)
420 430 440 450 460 4702
0
2
4
6
Measured pitch during launch
time (secs)
Pitc
h ang
le (d
eg)
4.21
0.95
A 1< >jp
470420 jp20 10 0 10 20 30
2
0
2
4
6
Calculated pitch motionstime (secs)
pitch
angl
e (de
g)
4.326
0.202
Z 4< >l
180p
.
29.77515 Z 1< >l
roll
pitch
4.4.2 Automatic Pretrimming using Feedback from z, φ and θRollandpitchanglesduringlift-off
CNN10th October 1999
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)
Courtesy to SeaLaunch