chapter 2 transient stability of smib system...
TRANSCRIPT

48
CHAPTER 2
TRANSIENT STABILITY OF SMIB SYSTEM USING
NONLINEAR CONTROL TECHNIQUE
2.1 INTRODUCTION
Electrical power systems play a vital role in modern human life and
any disturbances in their normal functioning cause interruptions to both the
component and system level. A large power system is very complex and
consists of various components such as power generating units which are
connected to each other and with distributed loads through very long
transmission lines, transformers and capacitors. The power system is a highly
nonlinear in nature. One of the most important aspects in electric system
operation is the stability of power systems. The property of the system to
return to an acceptable working condition following a transient is called the
transient stability and it is a critical issue in power systems. Typically systems
are lightly damped and are prone to heavy sustained oscillations after a
transient. Moreover, their nonlinear nature makes them difficult to control.
Control of power swing oscillations is an important control problem.
An important factor, which decides the capacity of a transmission
line to transfer the electrical power across the network, is the reactance of the
transmission line which decides the stability margin of the power system.
Many power electronic devices have been invented for increasing the capacity
and stability margin of the power systems. The concept of Flexible AC
Transmission System (FACTS) realized by Ghandhari et al (2001), Banaei &

49
Gholizadeh (2011) relies on the use of power electronic devices, and offers
greater control of power flow, secure loading and damping of power system
oscillations. These devices can be classified into two categories, one is shunt
devices in which the injected current is controlled, and the other is series
devices in which the inserted voltages are controlled. Static Var Compensator
(SVC) is an example of shunt devices, while series devices include Unified
Power Flow Controller (UPFC), Controllable Series Capacitor (CSC)
(Hemeida et al 2010).
Conventionally linear controllers are used to stabilize the power
system. In linear controllers, initially, the system is linearised about an
equilibrium point. Then design the controller for the linear system. In that
case the corresponding linear controller may not be adequate to stabilize the
system. There are two basic limitations of linearization. Firstly, it can only
predict the local behaviour of the nonlinear systems. And it cannot predict the
non local behaviour far from the operating point. Secondly the dynamics of
the nonlinear systems are much richer than the dynamics of a linear system.
Since there are nonlinear phenomena that can take place only in the presence
of nonlinearities like finite escape time, multiple isolated equilibrium point,
limit cycles, harmonic oscillations, chaos, etc. which cannot be described and
predicted by linear models.
Recently the application of nonlinear control theory like excitation
control, feedback linearization and passivity based control techniques has
been investigated for improving the transient stability of a power system.
Nonlinear control using turbine control, excitation control law, and feedback
linearization were applied to the single as well as multi machine systems, as
proposed by Lu & Sun (1989), King et al (1994), Ortega et al (1998),
Li (2006). However, those methods were fragile as it relies on nonlinearity
cancellation, and the issue of robustness remains unanswered, and this
50
motivates for investigation of energy based control of nonlinear systems. This
work addresses the problem of transient stabilization of the Single Machine
Infinite Bus (SMIB) system using Controllable Series Capacitor (CSC).
The organization of the chapter is as follows: Section 2.2 describes
the overview of the proposed method for enhancing the stability of the
system. Section 2.3 discusses the control strategy and section 2.4 discusses
the Immersion and Invariance techniques. The controller synthesis for the
development of control law is described in section 2.5. The improvement in
the stability of the system is illustrated in section 2.6 followed by conclusion
in section 2.7.
2.2 PROBLEM DEFINITION
The stability problem arises from the fact that for the system under
normal conditions, the average electrical speed of the generators must remain
the same anywhere in the system. This is termed as synchronous operation of
a system. Any small or large disturbances can affect the synchronous
operation (Hadi Saddat 2002). Recently the application of nonlinear control
techniques with Flexible AC Transmission Systems (FACTS) has been
investigated for improving transient stability of power systems. FACTS
technology is often most economic alternative for solving transmission
loading problems. It provides a mechanism to make the best use of existing
transmission. FACTS devices are capable of acting sufficiently to improve all
forms of stability as well as steady state conditions. Advancements in power
electronics has revolutionized the design and engineering concepts of the
FACTS devices. FACTS devices are highly effective in both controlling
power flow and in improving stability. This work uses a nonlinear control
technique called Immersion and Invariance (I&I) which uses CSC as an
actuator, which is connected in series with the transmission line. The control
system consisting of two subsystems, namely the second order nonlinear

51
swing equation of the SMIB system, and a first order system representing the
CSC have been explained by Manjarekar et al (2008). Astolfi & Ortega
(2003) proposed the Immersion and Invariance control strategy to achieve the
control objective. The SMIB stabilization is achieved using energy shaping
and damping assignment for the system.
2.3 CONTROL STRATEGY
The SMIB system with CSC proposed by Manjarekar et al (2008)
is shown in Figure 2.1. In practice, an infinite bus is a large power system
with a large inertia. Such a system does not exhibit significant oscillations on
the occurrence of transients and is considered as a reference bus to assess the
performance of a synchronous generator connected to it. The infinite bus is
denoted by bus 2 and the generator internal bus is connected to the infinite
bus through the transient reactance . The controllable series capacitor is
represented by variable capacitor .
Figure 2.1 SMIB system with CSC
where
is the rotor angle
E denotes the constant voltage behind the transient reactance of the
generator.
is direct axis transient reactance of the generator
VE21 djx'
cjx
G
52
The proposed work develops a nonlinear control law to
asymptotically stabilize SMIB system based on immersion and invariance
control strategy. The actuator used is a controllable series capacitor. The
control system considered has two subsystems, the second order nonlinear
swing equation of the SMIB system, and a first order system representing the
CSC. The control synthesis is based on two important nonlinear tools:
immersion (system) and invariance (manifold). The control objective is to
approximate the complete third order system with a second order dynamics,
for which an asymptotically stabilizing control law is proposed. The proposed
control law includes the damping factor which quickly damps out the power
system oscillations caused by interruptions. During an unstable condition, the
declining rate of the power system oscillation is determined by the damping
factor in the power system. The SMIB system stabilization is achieved using
energy shaping and damping of electromechanical oscillations in the system.
Let D be the damping constant (D > 0)
M be the moment of inertia constant (M > 0) and
P be the mechanical power input
Here the effect of saliency of the rotor is neglected. Also is
constant and is assumed to be zero. Let the effective line reactance between
bus1 and bus 2 be denoted by and the few assumptions are considered as
given in Equation (2.1).
The region of operation is
(2.1)
where are small numbers.

53
2.3.1 System Model
First the SMIB system described by Manjarekar et al (2008) using
the swing equation model is given in Equations (2.2) and (2.3).
(2.2)
The actuator is represented by using a first order equation of the form
(2.3)
where Tcsc is the time constant of the actuator, is the line reactance at the
desired equilibrium point and u is the input to the actuator. The state variables
of the system are defined as
And is a state vector T
The open loop operating equilibrium is denoted by The
complete control system can be represented using Equations (2.4) and (2.5),
(2.4)
54
or equivalently,
(2.5)
where for a given
2.3.2 Control Objective
In Equation (2.1), denotes the known operating equilibrium
point, and the control objective is stated as to design a control law u in order
to make the system represented in Equation (2.4) to be asymptotically
stable at .
2.4 IMMERSION AND INVARIANCE METHOD
The concept of invariance has been widely used in control theory.
For stabilization and for analysis of slow adaption systems slow and fast
invariant manifolds are used. Recently Astolfi & Ortega (2003) have
discovered that the notion of invariant manifolds is crucial in the design of
stabilizing control laws for classes of nonlinear systems. In this work
Immersion and Invariance (I&I) method is employed to design stabilizing and
adaptive control laws.
Main features of immersion and invariance method are:
Invariance: Invariant subspaces, invariant distributions play a
fundamental role in the design.

55
Immersion: To project the system under consideration into a
system with prescribed properties.
Immerse a generic non linear system into a linear and
controllable one by means of static and dynamic state
feedback system.
Does not require the knowledge of construction of a
Lyapunov function.
In the controller design, the complete third order system is
immersed in a reduced order target dynamics which is of order two. Astolfi &
Ortega (2003), Manjarekar et al (2008), Ghandhari et al (2001), Hoseynpoor
et al (2011) explained that the restriction of the full order system dynamics
coincides with the target dynamics by constructing manifold.
2.5 CONTROLLER DESIGN USING I&I
The state space model of the system is given in Equation (2.6)
(2.6)
where and are smooth functions, with state and control
, with an equilibrium point to be stabilized. Let p < n and
assume the following mappings,
Such that the following conditions hold as given in Equations (2.7),
(2.8), (2.9), (2.10), (2.11) and (2.12).

56
The system (Target System H1)
(2.7)
With state has an asymptotically stable equilibrium at
and
Immersion condition (H2) for all
(2.8)
Implicit manifold (H3)
The following set identity holds
(2.9)
Manifold attractivity and trajectory boundedness (H4)
All trajectories of the system
(2.10)
(2.11)
are bounded and satisfy
(2.12)
where and . Then x is an asymptotically stable
equilibrium of the closed loop system

57
The Equation (2.6) interpreted as theorem 1 for a given system and
for the target dynamics of the system as given in Equation (2.7), the manifold
M can be rendered as invariant and attractive.
2.6 CONTROLLER SYNTHESIS USING I&I
The control synthesis is based on two important nonlinear tools:
system (immersion) and manifold (invariance). The complete third order
system is immersed in a reduced order target dynamics of order two. The
target system is asymptotically stable. An invariant manifold is constructed
such that the restriction of the full order system dynamics coincides with the
target dynamics.
2.6.1 Target System
However, due to poor damping of open loop system, the transient
response is not satisfactory. Selection of the target dynamics in which the
closed loop system is immersed is a nontrivial task as described by
Hoseynpoor et al (2011). The first step in control synthesis is defined as two
dimensional dynamical system as follows:
Let be the state of the dynamical system
where denotes the potential energy of the system and is possibly
nonlinear damping function. The target system given in Equation (2.13) is a

58
simple pendulum system with a stable equilibrium with the
energy function as given in Equation (2.14),
(2.14)
2.6.2 Immersion Condition
After defining desired target dynamics, the immersion condition as
in Equation (2.8) becomes changed as shown in Equation (2.15)
Next, choose and in order to satisfy (2.15). The first
row of the equation is already satisfied. Then the second row of (2.15)
becomes
By choosing , and for some
> 0, Then Equation (2.15a) becomes

59
Equation (2.15b) indicates that is a function of both and .
To make bounded in a domain of operation and to ensure the stability
at equilibrium, the assumptions are considered as given in Equations (2.16)
and (2.17),
(2.16)
With the assumption given in Equation (2.17), it is realized that
bounded for all . So, the third row of Equation (2.15) becomes
By substituting for and in (2.18), is given in
Equation (2.19).
Thus and are obtained.
2.6.3 Implicit Manifold
The manifold is implicitly described by Equation (2.20)

60
with
where denotes
2.6.4 Manifold Attractivity and Trajectory Boundedness
Off-the manifold coordinate is and having the Equation (2. 21)
(2.22)
is asymptotically stable when the equilibrium of closed loop system when
2.6.5 Control Law
The control law is found,

61
Finally the boundedness of the trajectories of the closed loop
system referred in Equation (2.5) with the control law as given in Equation
(2.23) and the off-the-manifold coordinate z are established. It is found that
the assumption as given in Equation (2.17), is bounded for all , and
hence the closed loop system with control law is asymptotically stable at
2.7 SIMULATION RESULTS
The performance of the controller is assessed for the following two
different transient conditions:
A short circuit fault occurs on the far end of the transmission
line at time t = 20 sec for a duration of about 0.1 sec.
An open circuit fault occurs on one of two parallel transmission
lines at time t = 60 sec for a duration of about 0.1 sec.
The standard simulation parameters considered are (Ghandhari et al
2001), M .

62
, and are considered as tuning parameters. Line reactances are assumed
as constant parameters for the system. To assesses the performance of the
control law, the short circuit fault (L-G) occurs at the far end of the
transmission line at t = 20 sec for a duration of 0.1 sec and an open circuit
fault occurs on one of the two transmission lines at time t = 60 sec for a
duration of about 0.1 sec.
For the short circuit fault, the magnitude of the oscillations is
greater as compared to the open circuit fault. The open loop performances for
rotor angle and rotor angular speed are presented for both the transients as
shown in Figure 2.2. Therefore, additional damping term in the target
dynamics improves the transient performance. Closed loop performances
without damping coefficient assessed for various values of and are shown
in Figure 2.3 to Figure 2.5.
The tuning parameter decides the shape of the energy function of
the closed loop system and decides the rate at which the closed loop system
trajectories reach the desired trajectories. Figure 2.3 shows simulation results
for and . In this case as compared to open loop response the
amplitude of oscillations in rotor angle and rotor angular velocity are very
small. Similarly as in open loop response the oscillations are greater during
short circuit fault than the open circuit fault. But unlike the open loop
response, the line reactance of the system varies with the same magnitude for
both the faults.

63
Figure 2.2 Open loop response

64
Figure 2.3 Closed loop response with and
In the second case, by assuming and , the effect of
increase in is realized. The simulation result plotted in Figure 2.4 shows
improvement in the closed loop response with less magnitude, however, it is
oscillatory in nature. The swing angle experiences rapid oscillations as
compared to the first case, and is further reflected in the response of the
angular velocity. From the plot it has been observed that, increase in
introduces oscillations in the load angle and in the angular velocity.
65
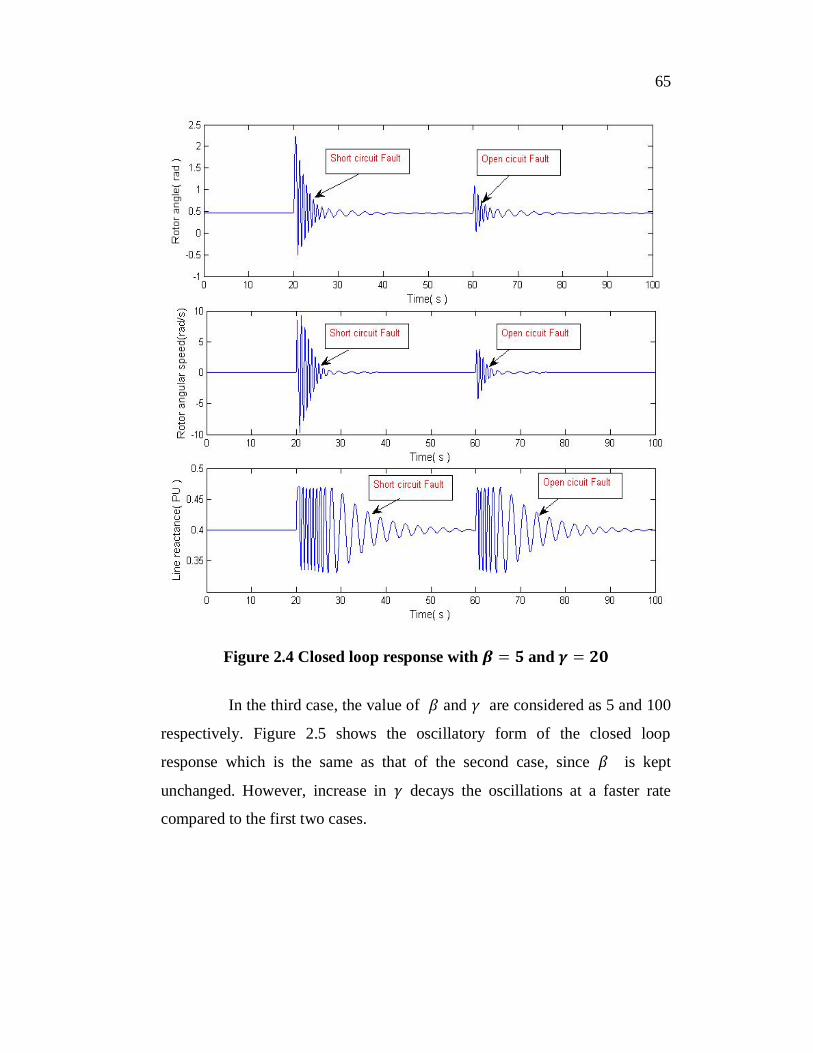
Figure 2.4 Closed loop response with and
In the third case, the value of and are considered as 5 and 100
respectively. Figure 2.5 shows the oscillatory form of the closed loop
response which is the same as that of the second case, since is kept
unchanged. However, increase in decays the oscillations at a faster rate
compared to the first two cases.

66
Figure 2.5 Closed loop response with and
Figure 2.6 shows the closed loop performance for = 30 and
= 50. It has been observed that, there is an improvement in the closed loop
response with fewer oscillations compared to first three cases for both short
circuit and open circuit faults.

67
Figure 2.6 Closed loop response with and
The closed loop performance of the controller without damping
coefficient for various values of and produce the rapid oscillations,
but faster decay of oscillations are not obtained as explained by Manjarekar et
al (2008). Hence, to obtain faster decay of oscillations, the control law with
damping coefficient is considered and the corresponding closed loop

68
performances are shown in Figure 2.7, Figure 2.8 and Figure 2.9 respectively.
From Figure 2.7 for = 5, and = 2.7, it is found that the closed
loop response of the system has reduced oscillations with less magnitude as
compared to closed loop performance without damping coefficient.
Figure 2.7 Closed loop response with and

69
Figure 2.8 Closed loop response with and

70
Figure 2.9 Closed loop response with and

71
From Figure 2.8 and Figure 2.9, it has been observed that the
oscillatory form of the closed loop performance remains the same as that of
the Figure 2.7, since the has not been changed. However, oscillations
decay much faster as compared to previous cases. The tuning parameter
tunes the system, so that the faster decay of oscillations is achieved in rotor
angle and angular velocity, so the transient stability has been improved.
2.8 SUMMARY
In this research work a nonlinear control law is designed to
asymptotically stabilize the SMIB system at equilibrium point based on
immersion and invariance control strategy. The SMIB system is described as
a swing equation model. And the CSC, which is used as an actuator is
described as a first order model. A simple pendulum system with a suitable
energy function was chosen as the target dynamics. The manifold is chosen in
such a way that the closed loop system is restricted to the target dynamics.
The control law has been synthesized in order to render the manifold
invariant. As evident from the graphs, it is clear that the proposed control law
exhibits improved transient performance and reduces the oscillations quickly
compared to existing control law without damping assignment suggested by
Manjarekar et al (2008). Thus the described control technique with damping
assignment exhibits faster decay of oscillations in rotor angle and angular
velocity for various values of tuning parameters.