chapter 10 stability and frequency...
TRANSCRIPT

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 1
Chapter 10Stability and Frequency
Compensation
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 2
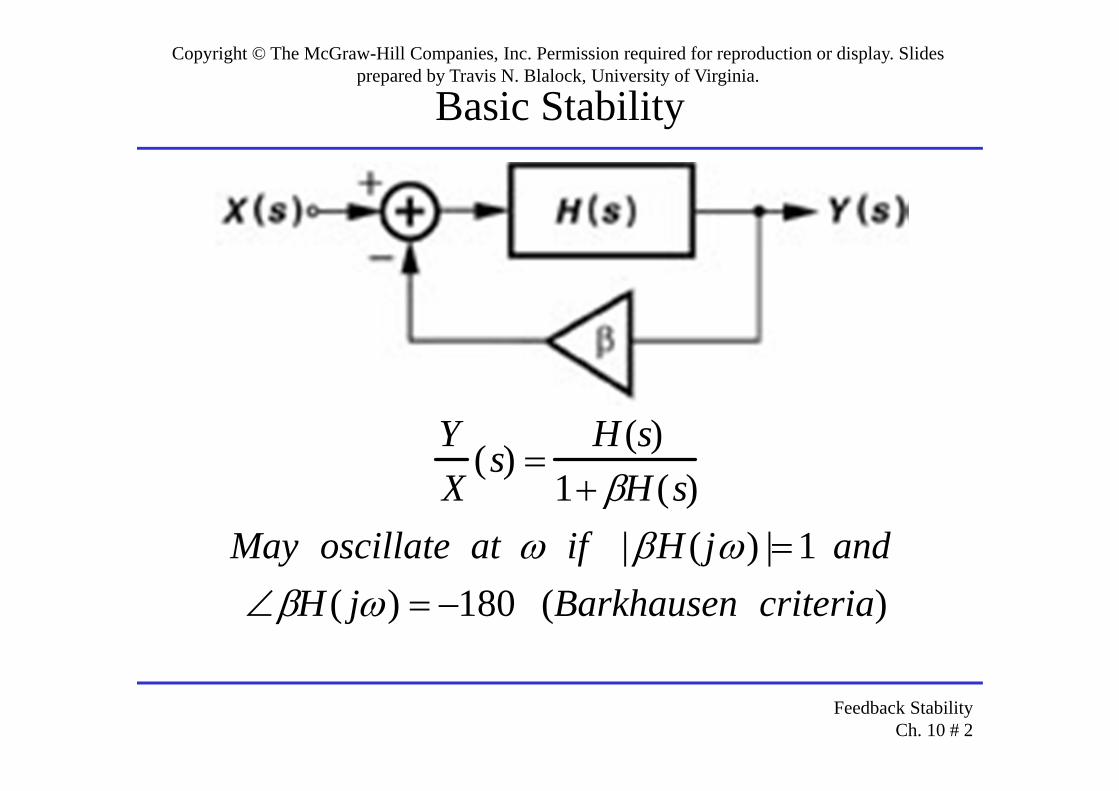
Basic Stability
YX
(s) H (s)
1 H (s)May oscillate at if |H ( j) |1 and H ( j) 180 (Barkhausen criteria)
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 3
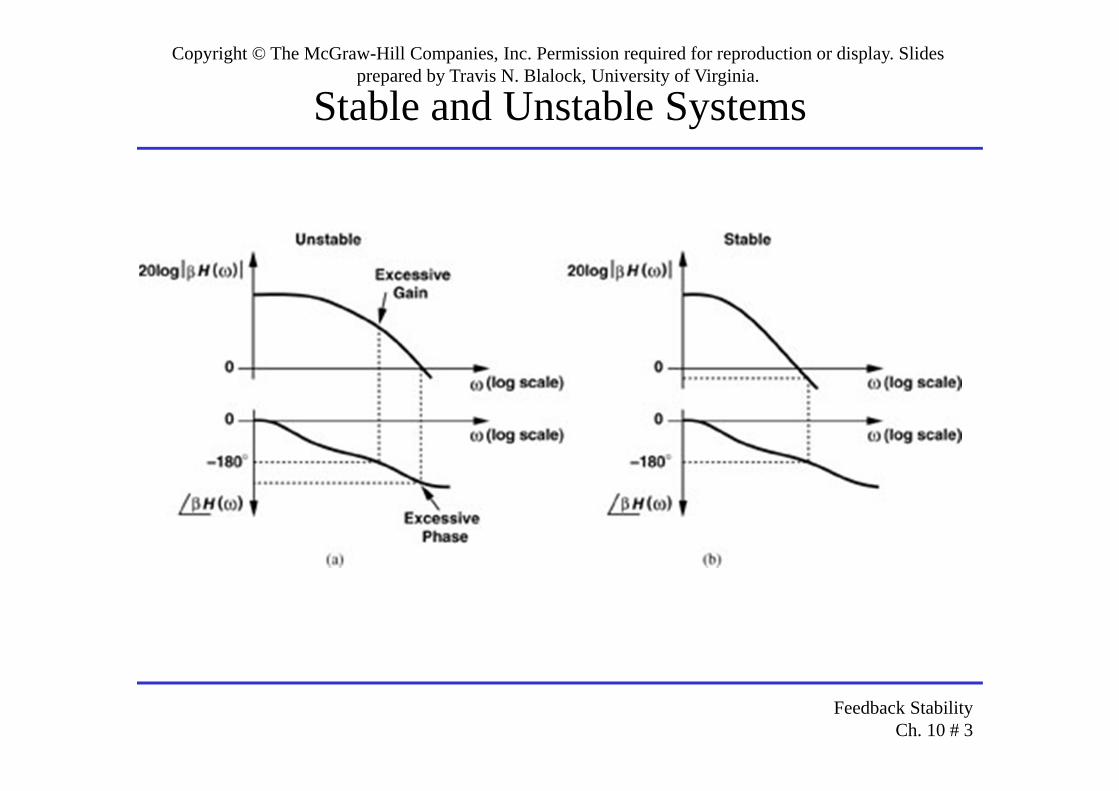
Stable and Unstable Systems

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 4
Stability and Complex Poles
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 5
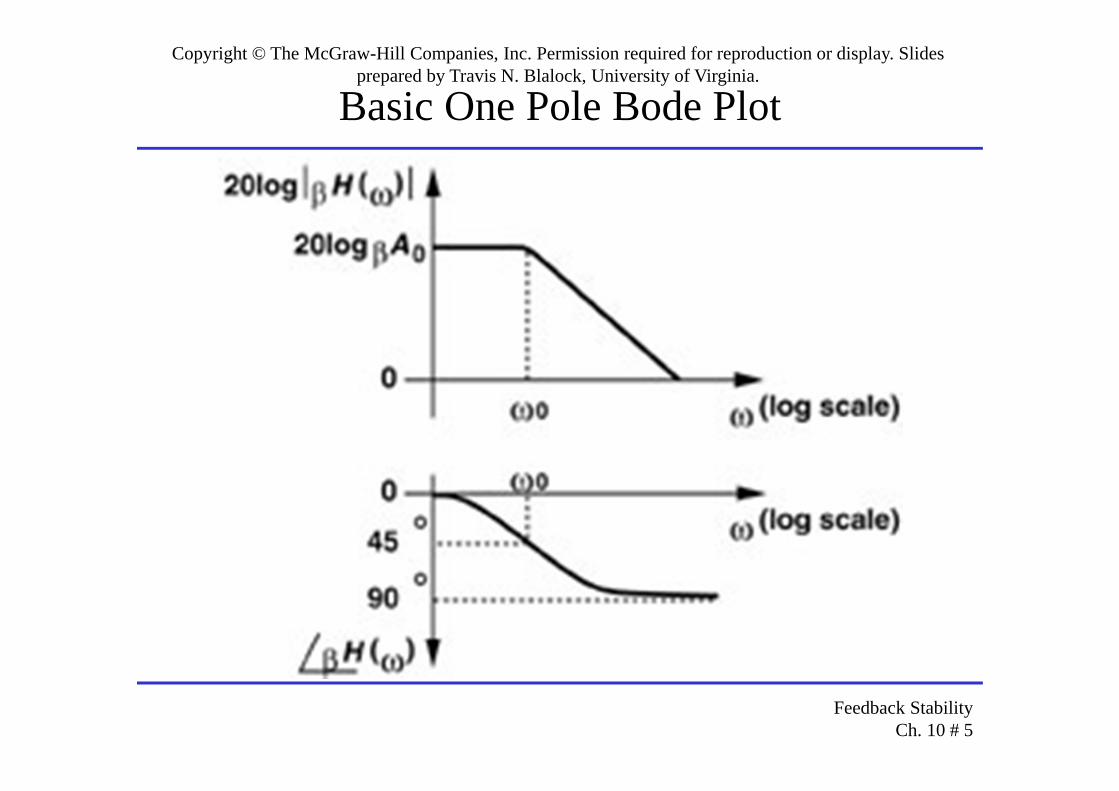
Basic One Pole Bode Plot
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 6
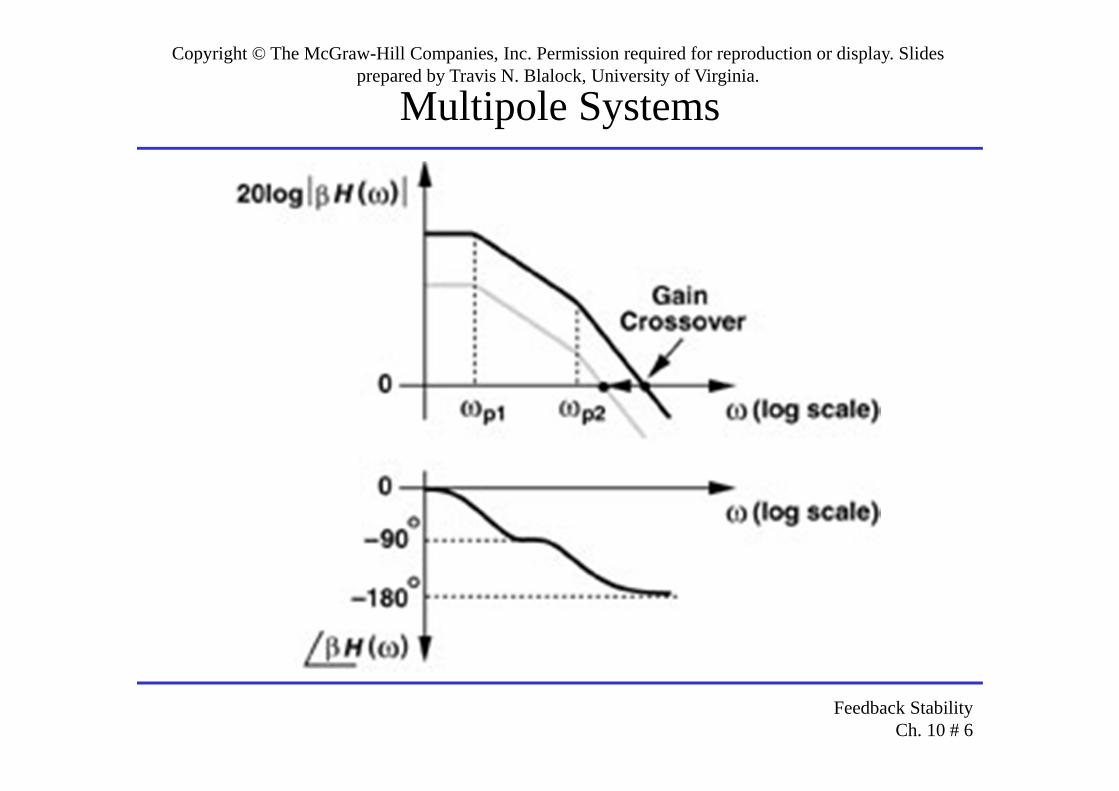
Multipole Systems

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 7
Phase Margin
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 8
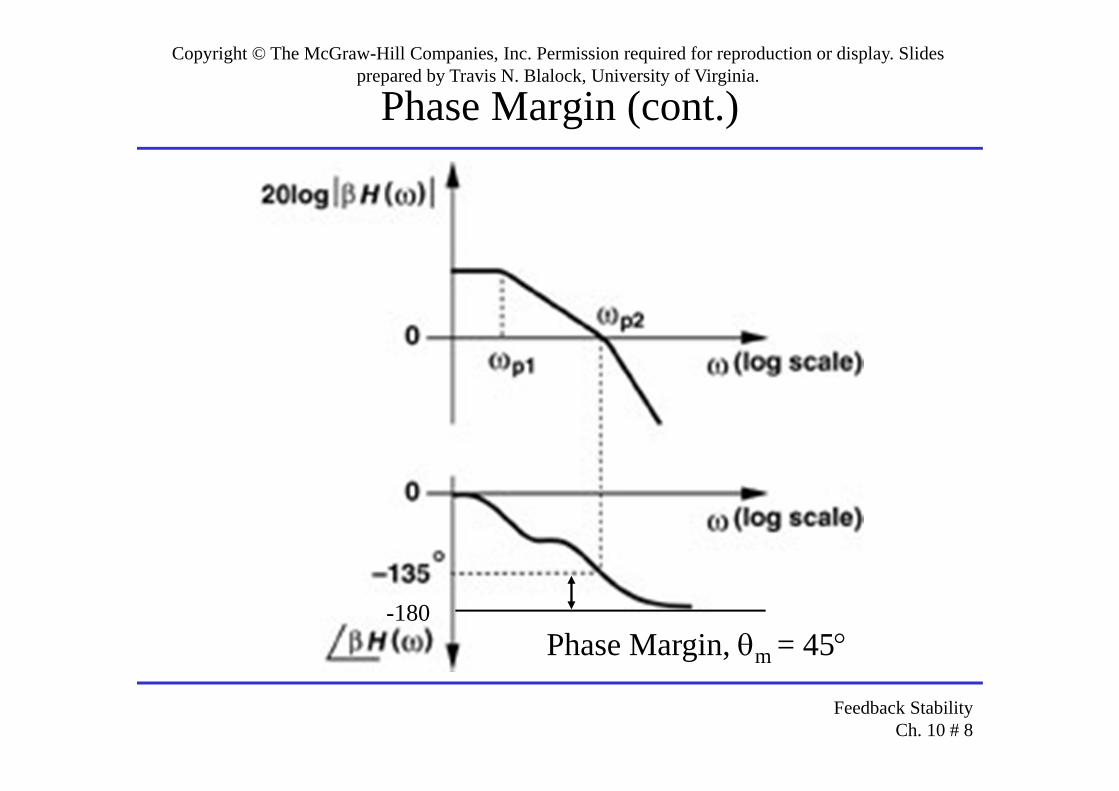
Phase Margin (cont.)
-180Phase Margin, m = 45
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 9
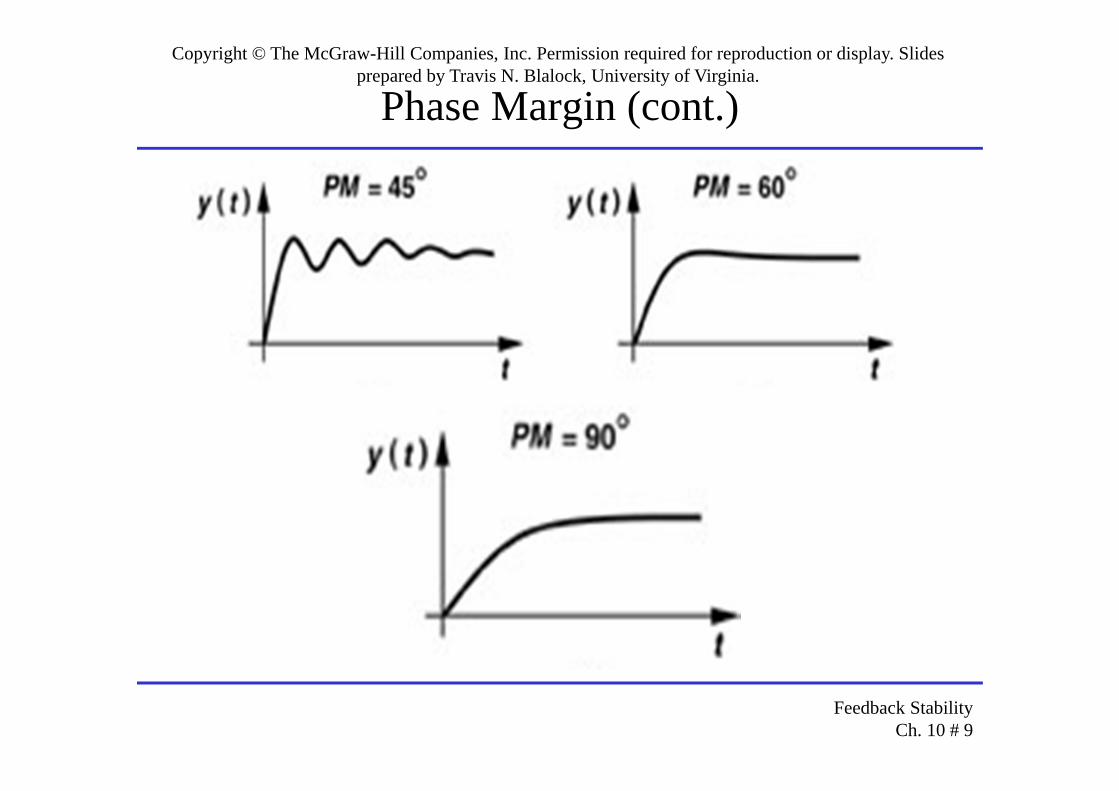
Phase Margin (cont.)
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 10
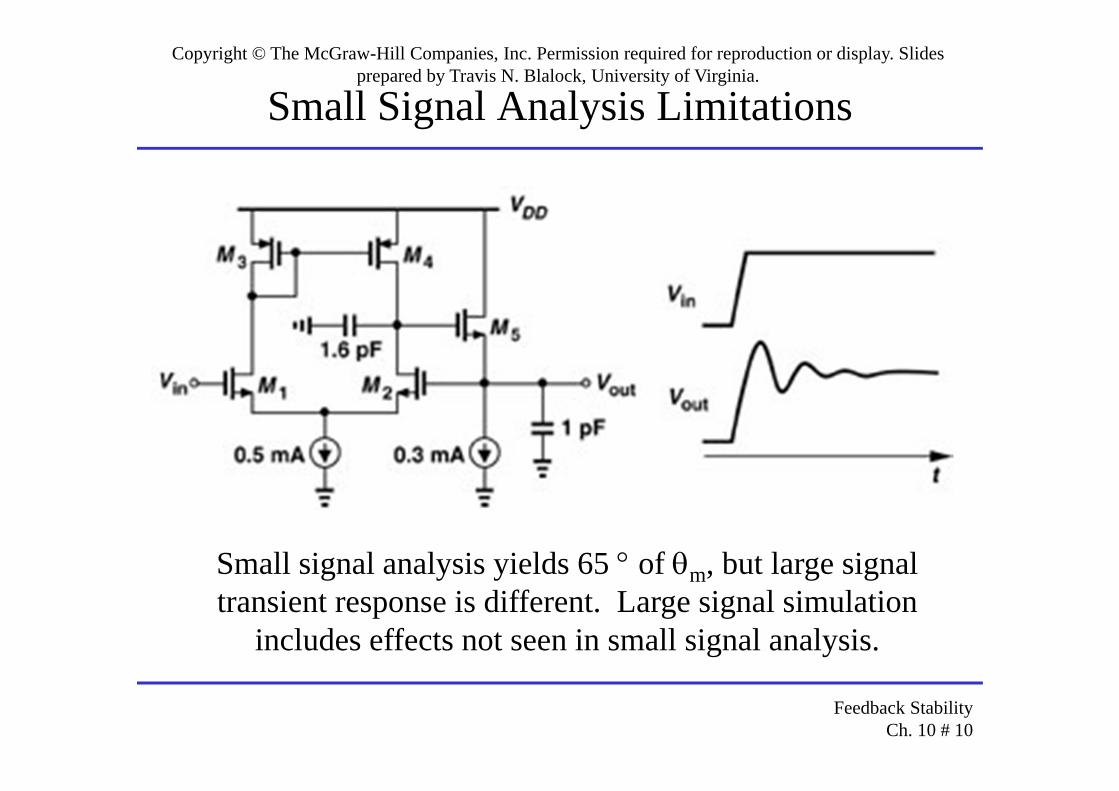
Small Signal Analysis Limitations
Small signal analysis yields 65 of m, but large signal transient response is different. Large signal simulation
includes effects not seen in small signal analysis.

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 11
Frequency Compensation
Compensation is the manipulation of gain and/or pole positions to improve phase margin.

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 12
Compensation (cont.)

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 13
Single Ended Single Stage Amp
Dominant Pole at Output
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 14
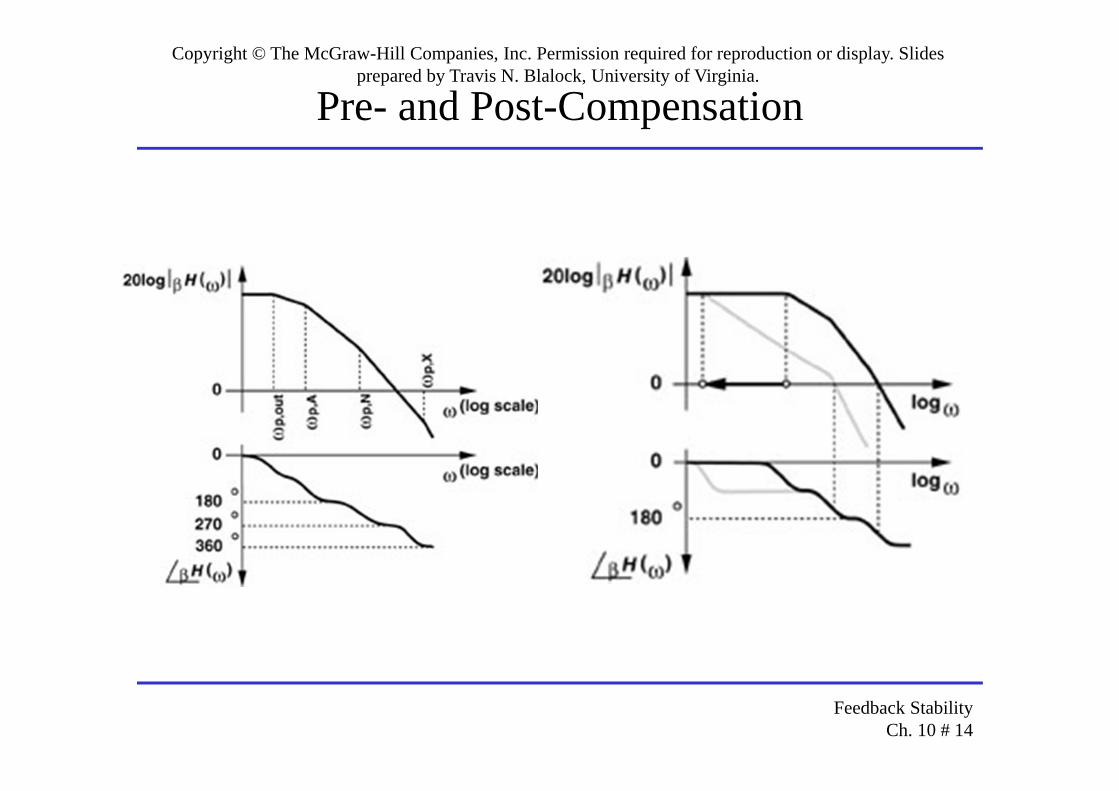
Pre- and Post-Compensation

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 15
Compensation (cont.)

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 16
Compensation Example
Given T0 5000V /V, fp1 2MHz, fp2 25MHz, fp3 50MHzDesire m 70, find f0db and new f p1
70 180 tan1( f0dbf p1
) tan1( f0dbf p2
) tan1( f0dbf p 2
)
70 90 tan1( f0dbf p 2
) tan1( f0dbf p2
), assume 90 from f p1
f0db 6MHzf0db T0 f p1 f p1 f0db /T0 1.2KHz
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 17
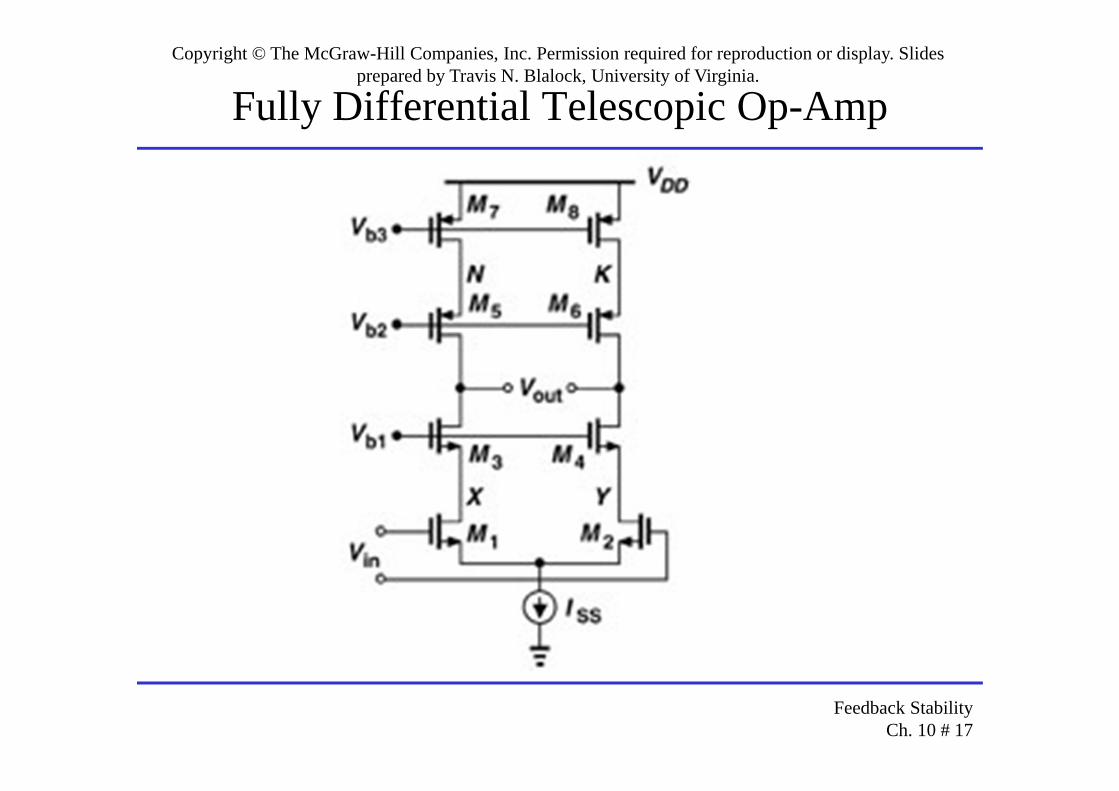
Fully Differential Telescopic Op-Amp
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 18
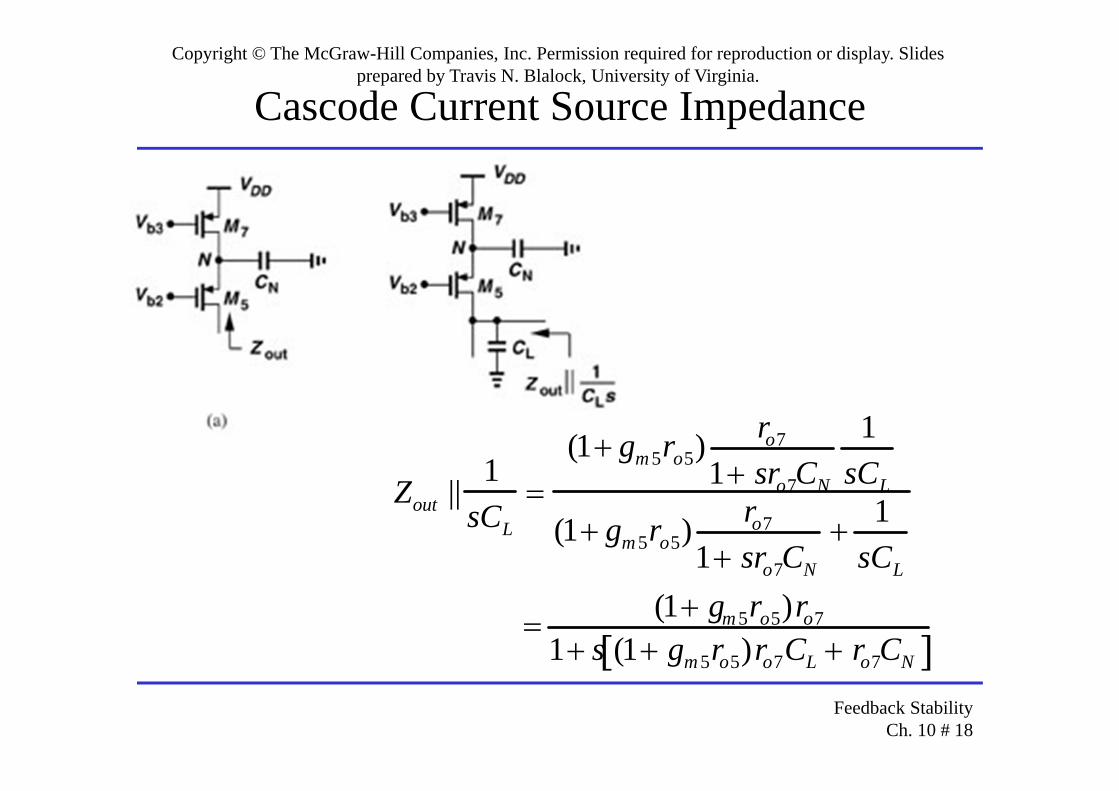
Cascode Current Source Impedance
Zout ||1
sCL
(1 gm 5ro5)
ro7
1 sro7CN
1sCL
(1 gm 5ro5)ro7
1 sro7CN
1sCL
(1 gm 5ro5)ro7
1 s (1 gm 5ro5)ro7CL ro7CN
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 19
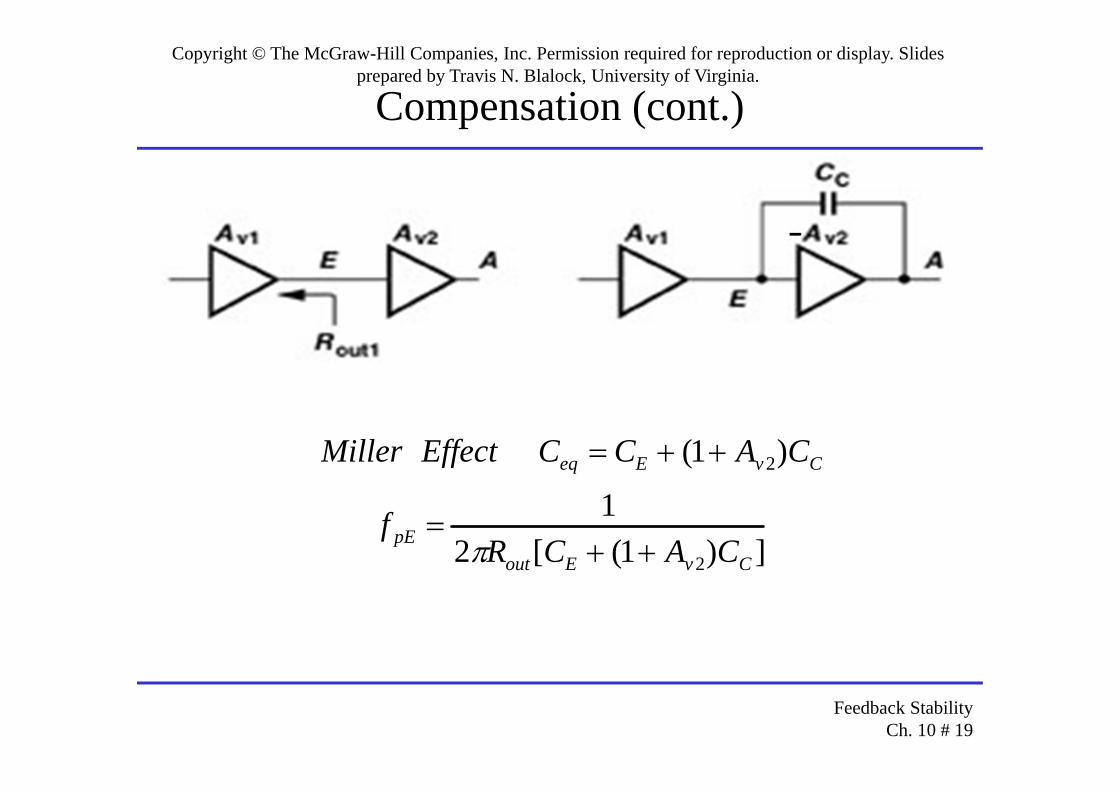
Compensation (cont.)
Miller Effect Ceq CE (1 Av2)CC
f pE 1
2Rout[CE (1 Av2)CC ]
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 20
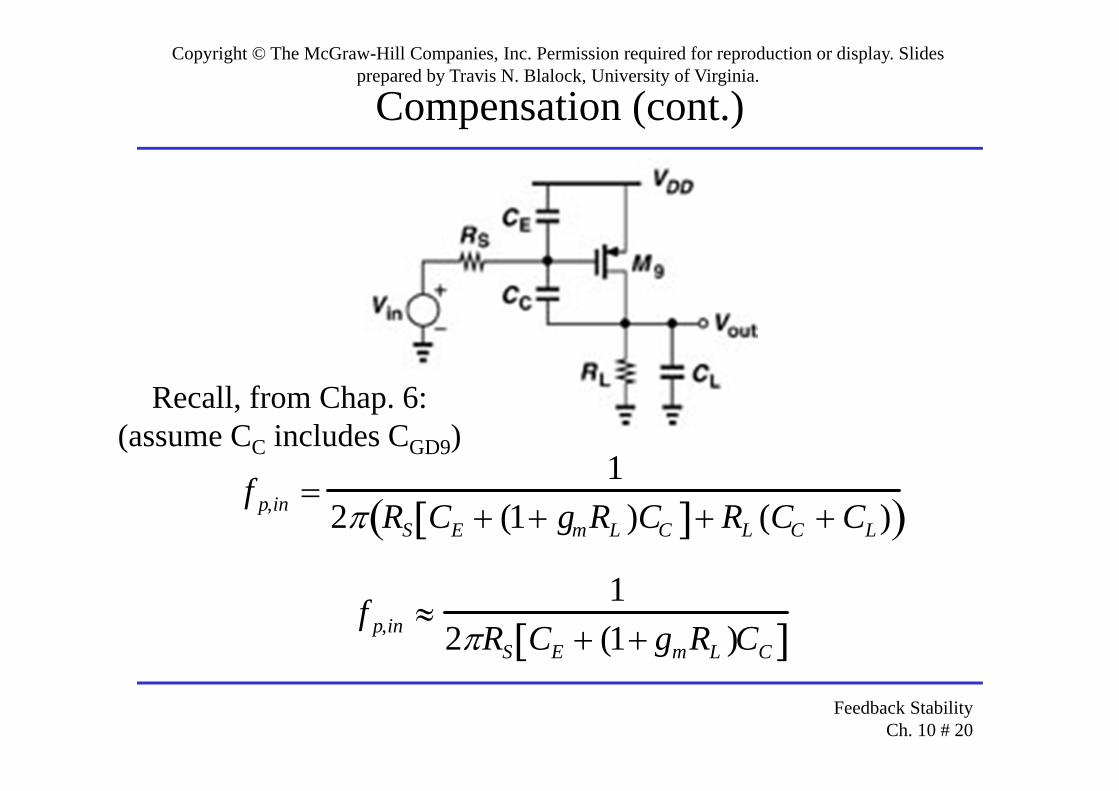
Compensation (cont.)
f p,in 1
2 RS CE (1 gmRL )CC RL (CC CL)
Recall, from Chap. 6:(assume CC includes CGD9)
f p,in 1
2RS CE (1 gmRL )CC

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 21
Compensation (cont.)
f p,out RSgm 9RLCC RLCC
2RS RL(CECC CCCL )
gm 9
2 (CE CL )
f p,out RS (1 gm 9RL )CC RSCE RL(CC CL)
2RS RL(CECC CECL CC CL)
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 22
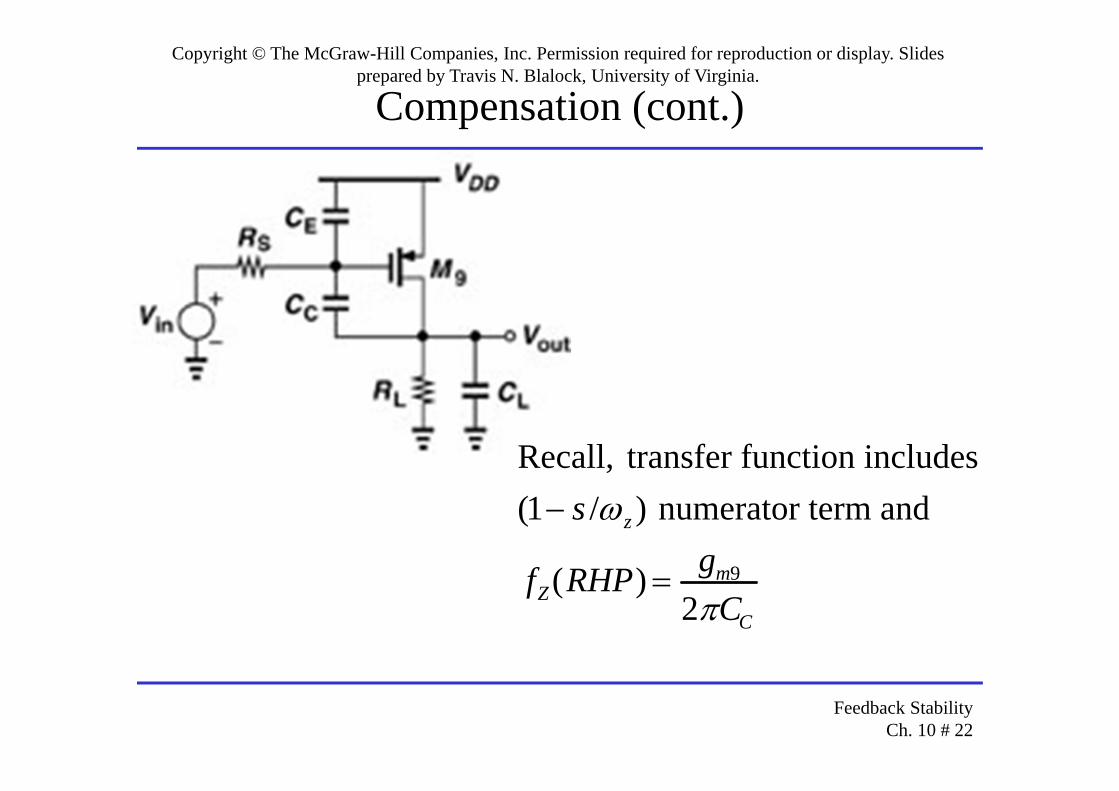
Compensation (cont.)
Recall, transfer function includes(1 s /z ) numerator term and
fZ(RHP) gm9
2CC

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 23
Phase and Magnitude of RHP Zero

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 24
RHP Zero Removal
fZ gm 9
2CC (1/gm 9 RZ )

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 25
RHP Zero Removal (cont.)
fZ 12CC (1/ gm 9 RZ )
Could set R z =1/gm9, or cancel other non - dominant pole
1CC (1/gm 9 RZ )
gm9
CL CE
RZ CL CE CC
gm 9CC
CL CC
gm 9CC

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 26
Miller Compensation (cont.)
Temp. and Process Tracking
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 27
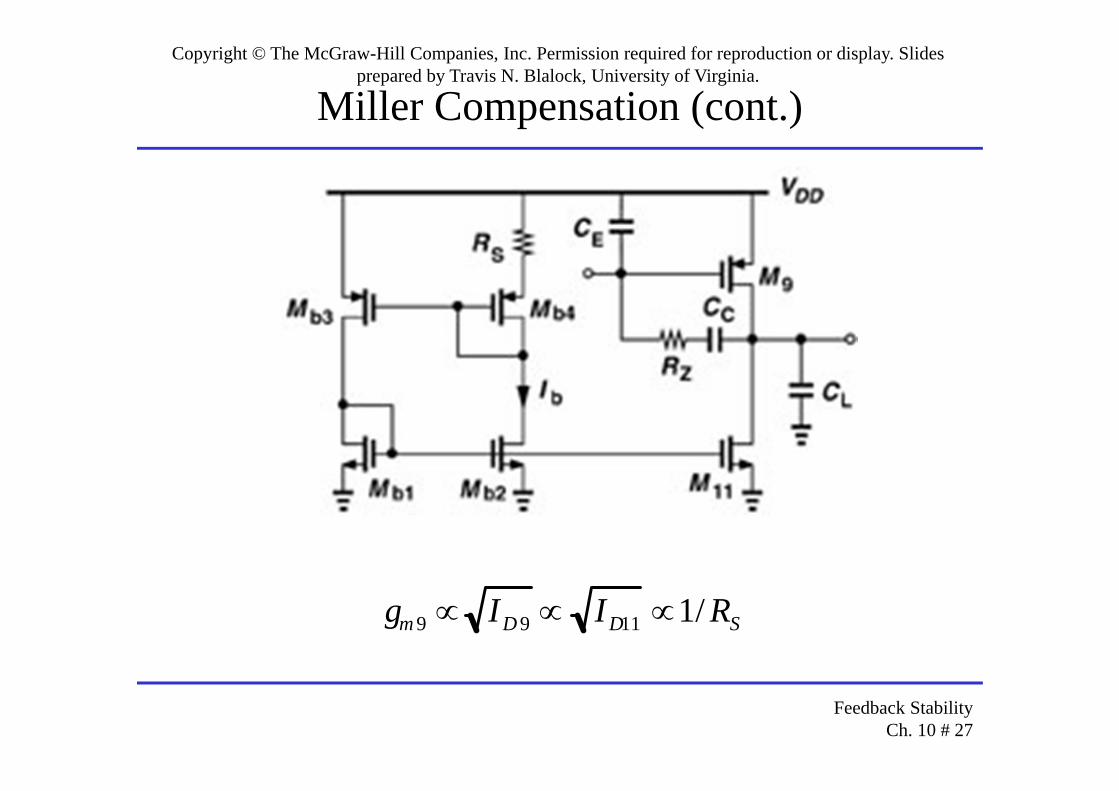
Miller Compensation (cont.)
gm 9 ID 9 ID11 1/ RS

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 28
Load Capacitance Effects

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 29
Other Compensation Techniques (cont.)
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 30
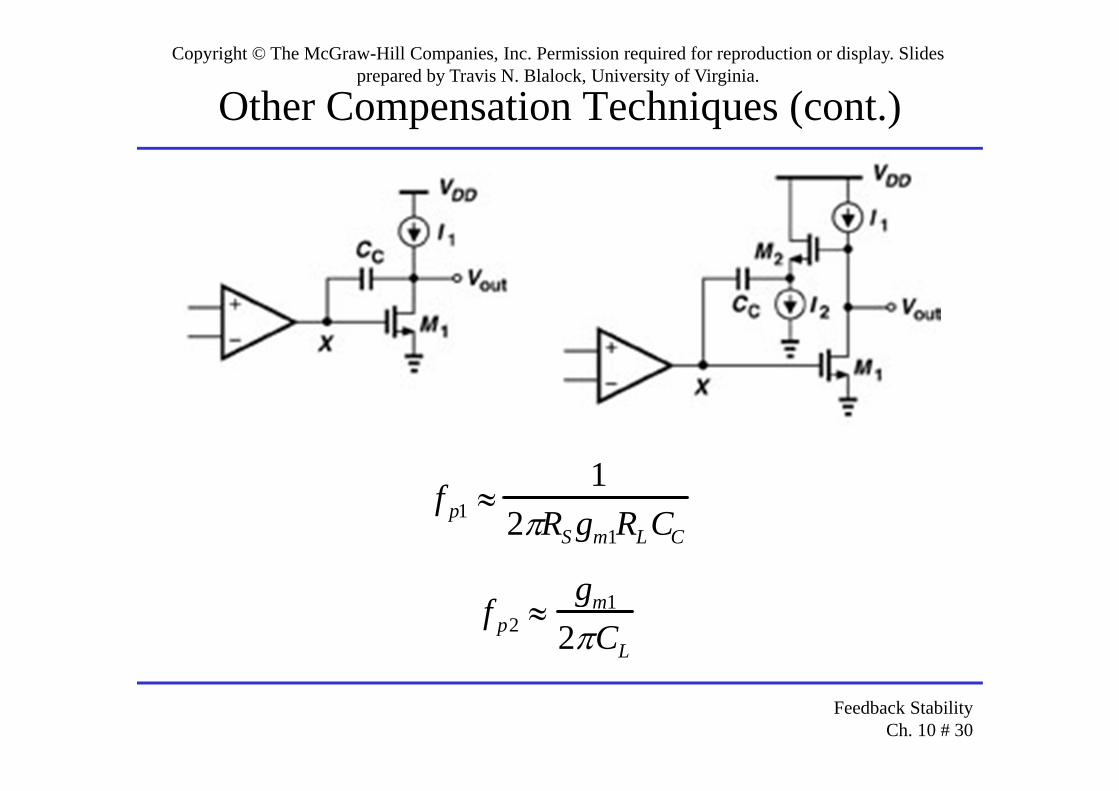
Other Compensation Techniques (cont.)
f p1 1
2RS gm1RLCC
f p2 gm1
2CL

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 31
Other Compensation Techniques (cont.)

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 32
Other Compensation Techniques (cont.)
f p1 1
2RS gm1RLCC
f p2 gm1gm 2RS
2CL

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 33
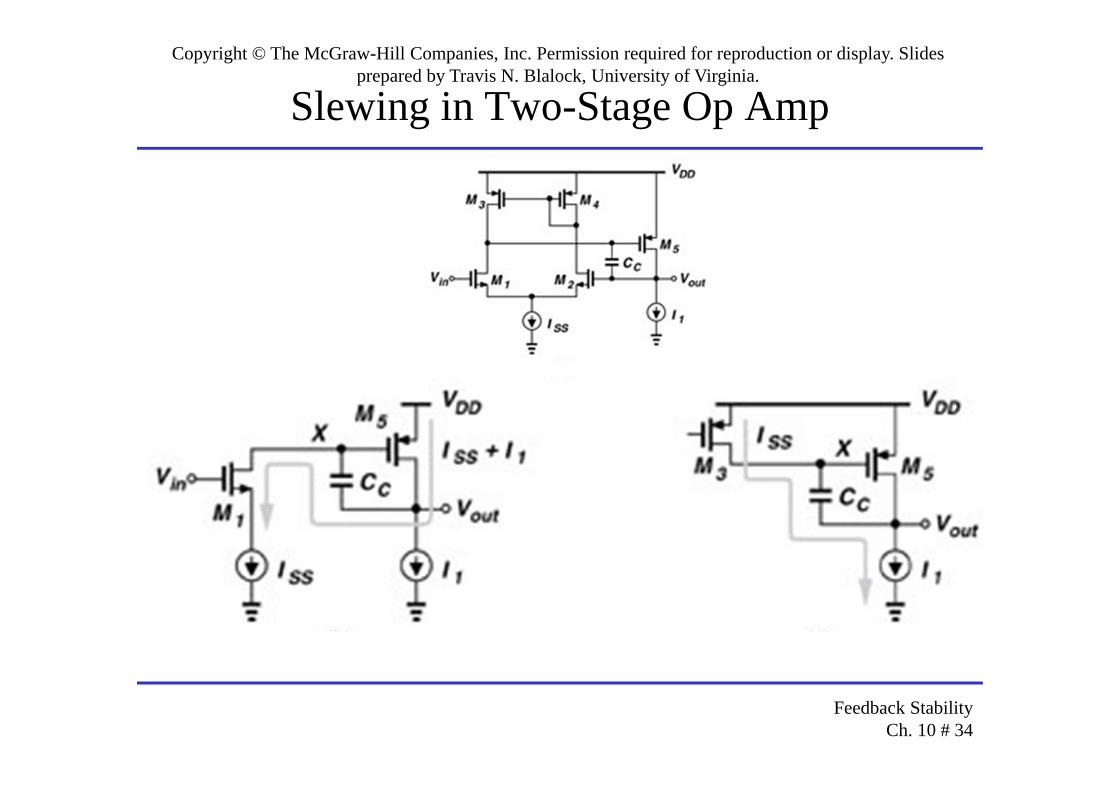
Slewing in Two-Stage Op Amps
Basic Two-Stage Op Amp
Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 34
Slewing in Two-Stage Op Amp

Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Slides prepared by Travis N. Blalock, University of Virginia.
Feedback StabilityCh. 10 # 35
Slewing with Common-Gate Compensation