chaos enhanced differential evolution in the task of evolutionary
TRANSCRIPT

Research ArticleChaos Enhanced Differential Evolution in the Task ofEvolutionary Control of Selected Set of Discrete Chaotic Systems
Roman Senkerik1 Ivan Zelinka2 Michal Pluhacek1
Donald Davendra2 and Zuzana Oplatkovaacute Kominkova1
1 Faculty of Applied InformaticsTomas Bata University in Zlin Namestı TG Masaryka 5555 760 01 Zlin Czech Republic2 Faculty of Electrical Engineering and Computer Science VSB-Technical University of Ostrava 17 Listopadu 15Poruba 708 33 Ostrava Czech Republic
Correspondence should be addressed to Roman Senkerik senkerikfaiutbcz
Received 6 March 2014 Accepted 7 July 2014 Published 26 August 2014
Academic Editor Gerhard-WilhelmWeber
Copyright copy 2014 Roman Senkerik et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Evolutionary technique differential evolution (DE) is used for the evolutionary tuning of controller parameters for the stabilizationof set of different chaotic systems The novelty of the approach is that the selected controlled discrete dissipative chaotic systemis used also as the chaotic pseudorandom number generator to drive the mutation and crossover process in the DE The idea wasto utilize the hidden chaotic dynamics in pseudorandom sequences given by chaotic map to help differential evolution algorithmsearch for the best controller settings for the very same chaotic systemThe optimizations were performed for three different chaoticsystems two types of case studies and developed cost functions
1 Introduction
In many engineering applications one of the most innatetasks is the controlling of highly nonlinear dynamical systemsin order to either eliminate or synchronize the chaosThe firstpioneering approach to control chaotic dynamics by meansof a simple analytical linearization method was introducedin 1990s by Ott et al (ie OGY method) [1] Subsequentlythe rapid development ofmethods for stabilizing of nonlinearchaotic dynamics has arisen and many advanced techniqueshave been applied for chaos control and chaos synchroniza-tion including methods from the artificial intelligence field
During recent years usage of new intelligent systems inengineering technology modeling computing and simula-tions has attracted the attention of researchers worldwideThe most current methods are mostly based on soft comput-ing which is a discipline tightly bound to computers repre-senting a set of methods of special algorithms belonging tothe artificial intelligence paradigmThemost popular of thesemethods are neural networks evolutionary algorithms (EAs)fuzzy logic and tools for symbolic regression like geneticprogramming Currently EAs are known as a powerful set
of tools for almost any difficult and complex optimizationproblem
The interest about the interconnection between evolu-tionary techniques and control of chaotic systems is rapidlyspreadingThe initial research was conducted in [2] whereas[3 4] was more concerned with the tuning of parametersinside the chaos control technique based on the Pyragasmethod extended delay feedback control (ETDAS) [5]When compared to the aforementioned research later works[6 7] show a possibility as to how to generate the entire con-trol law (not only how to optimize several parameters) for thepurpose of stabilization of a chaotic system Such approachalso may overcome the possible sensitivity to initial con-ditions which may lead to stability issues The synthesis ofcontrol is inspired by the Pyragasrsquo delayed feedback controltechnique [8 9] This method is very advantageous for theevolutionary computation due to its amount of easy accessi-ble control parameters which can be easily tuned by meansof EAs
Other approaches utilizing the EAs for stabilizing chaoticdynamics have mostly applied the particle swarm opti-mization (PSO) algorithm [10] and multi-interval gradient
Hindawi Publishing Corporatione Scientific World JournalVolume 2014 Article ID 836484 12 pageshttpdxdoiorg1011552014836484
2 The Scientific World Journal
method [11] orminimum entropy control technique [12] EAshave been also frequently used in the task of synchronizationof chaos [13ndash15] In [16] an EA for optimizing local control ofchaos based on a Lyapunov approach is presented
Evolutionary techniques were also used for the synthesisof new complex discrete type structureswith chaotic behavior[17] as well as the synthesis (identification) of a mathematicalmodel of chaotic system based on the measured data [18]
Another example of interconnection between determin-istic chaos and EAs represents the research focused on theembedding of chaotic dynamics into the EAs Recent researchin chaos driven heuristics has been fueled with the predispo-sition that unlike stochastic approaches a chaotic approachis able to bypass local optima stagnationThis one clause is ofdeep importance to EAs A chaotic approach generally usesthe chaoticmap in the place of a pseudorandomnumber gen-erator [19] This causes the heuristic to map unique regionssince the chaotic map iterates to new regionsThe task is thento select a very good chaotic map as the pseudorandomnumber generator
The initial concept of embedding chaotic dynamics intoEAs is given in [20] Later the initial study [21]was focused onthe simple embedding of chaotic systems in the form of chaospseudorandom number generator (CPRNG) for differentialevolution (DE) [22] and self-organizing migrating algorithm(SOMA) [23] in the task of optimal PID tuning Also thePSO algorithm with elements of chaos was introduced as theCPSO [24] This field of research was later extended withthe successful experiments with chaos driven DE [25] in realdomain as well as in combinatorial problems domain [26 27]
At the same time the chaos embedded PSO with inertiaweigh strategy was closely investigated [28] followed by theintroduction of a PSO strategy driven alternately by twochaotic systems [29] and novel chaotic multiple choice PSO(chaos MC-PSO) strategy [30] Recently the chaotic fireflyalgorithm was also introduced [31]
Finally the last example represents the research focusingon the EAs and the edge of chaos An unconventional ap-proach of the edge of chaos and its application to discrete sys-tems and evolutionary algorithms in terms of stagnationavoidance is presented in [32]
The organization of this paper is as follows firstly usedevolutionary technique which is DE is described and is fol-lowed by the description of the ChaosDE conceptThereafterthe problemdesign and appropriate corresponding cost func-tions are investigated and proposed Results and conclusionfollow afterwards
2 Motivation
This paper extends the research of evolutionary chaos con-trol optimization by means of ChaosDE algorithm [33ndash35]Recent studies have shown that differential evolution [22]is one of the most potent heuristics and it has been usedfor a number of optimization tasks [36ndash38] have exploredDE for combinatorial problems [39 40] have hybridized DEwhereas [41ndash43] have developed self-adaptive DE variants
In this paper the DErand1bin strategy driven by differ-ent chaotic maps (systems) was utilized to solve the issue of
evolutionary optimization of chaos control for the very samechaotic system used as a CPRNG in the particular case studyThus the idea was to utilize the hidden chaotic dynamics inpseudorandom sequences given by chaoticmap to help differ-ential evolution algorithm search for the best controller set-tings for the very same chaotic system Since the very positivecontribution of the chaotic dynamics to the performance ofDE in the task of evolutionary chaos control optimizationwasproven in comparison with original canonical DE within theinitial study [44] this paper is not primarily focused on theperformance comparisons with different heuristic But thisresearch extends the initial work with the aforementionedidea and with the several case studies combining differentchaotic systems and different utilized cost functions
3 Used Heuristic Differential Evolution (DE)
DE is a simple and powerful population-based optimizationmethod that works either on real-number-coded individualsor with small modifications on discrete type individuals [2245 46] DE is quite robust fast and effective with globaloptimization abilityThis global optimization ability has beenproven in many interdisciplinary researches It works welleven with noisy and time-dependent objective functionsThecanonical basic principle is as follows
For each individual 119894119866
in the current generation G DEgenerates a new trial individual 1015840
119894119866by adding the weighted
difference between two randomly selected individuals 1199031119866
and 1199032119866
to a randomly selected third individual 1199033119866
Theresulting individual 1015840
119894119866is crossed over with the original
individual 119894119866Thefitness of the resulting individual referred
to as a perturbed vector 119894119866+1
is then compared with thefitness of
119894119866 If the fitness of
119894119866+1is greater than the
fitness of 119894119866 then
119894119866is replaced with
119894119866+1 otherwise
119894119866
remains in the population as 119894119866+1
Please refer to (1) for notation of crossover and to [22] for
the detailed description of used DERand1Bin strategy and allother DE strategies
119906119894119866+1= 1199091199031119866+ 119865 sdot (119909
1199032119866minus 1199091199033119866) (1)
4 Concept of ChaosDE
This section contains the description of discrete dissipativechaotic maps which can be used as the chaotic pseudoran-dom generators for DE as well as the main principle of theChaosDE concept In this research direct output iterations ofthe chaoticmapswere used for the generation of real numbersin the process of crossover based on the user definedCR valueand for the generation of the integer values used for selectionof individuals
41 Chaotic Pseudorandom Number Generator The generalidea of ChaosDE and CPRNG is to replace the default PRNGwith the discrete chaotic map As the discrete chaotic mapis a set of equations with a static start position we created arandom start position of the map in order to have differentstart position for different experiments (runs of EAs) This
The Scientific World Journal 3
random position is initialized with the default PRNG as aone-off randomizer Once the start position of the chaoticmap has been obtained the map generates the next sequenceusing its current position
The first possible way is to generate and store a long datasequence (approximately 50ndash500 thousands numbers) duringthe evolutionary process initialization and keep the pointer tothe actual used value in the memory In case of the using upof the whole sequence the new one will be generated with thelast known value as the new initial one
The second approach is that the chaotic map is notreinitialized during the experiment and any long data seriesis not stored thus it is imperative to keep the current state ofthe map in memory to obtain the new output values
As two different types of numbers are required inChaosDE real and integers the use of modulo operators isused to obtain values between the specified ranges as givenin the following equations (2)
rndreal = mod (abs (rndChaos) 10)
rndint = mod (abs (rndChaos) 10) times Range + 1(2)
where abs refers to the absolute portion of the chaotic mapgenerated number rndChaos mod is the modulo operatorand Range specifies the value (inclusive) till where thenumber is to be scaled
42 Selected Chaotic Systems This subsection contains themathematical and graphical description of the three selecteddiscrete dissipative systems which served both as forCPRNGs and also as the examples of systems to be evolution-ary controlled
421 Burgers Map The Burgers mapping is a discretizationof a pair of coupled differential equations which were used byBurgers to illustrate the relevance of the concept of bifurca-tion to the study of hydrodynamics flowsThemap equationsare given in (3) with control parameters 119886 = 075 and 119887 = 175as suggested in [47]
119883119899+1= 119886119883119899minus 119884
2
119899
119884119899+1= 119887119884119899+ 119883119899119884119899
(3)
422 Delayed Logistic The delayed logistic is a simple two-dimensional discrete system similar to the one-dimensionallogistic equation The map equations are given in (4) Theparameter used in this work is 119860 = 227 as also suggestedin [47]
119883119899+1= 119860119883
119899(1 minus 119884
119899)
119884119899+1= 119883119899
(4)
423 Lozi Map The Lozi map is a simple discrete two-dimensional chaoticmapThemap equations are given in (5)The parameters used in this work are as follows 119886 = 17 and119887 = 05 as suggested in [47] For these values the systemexhibits typical chaotic behavior and with this parameter
10
05
00
minus05
minus10
minus25 minus20 minus15 minus10 minus05 00
y
x
Figure 1 119909 119910 plot of the Burgers map
setting it is used in most research papers and other literaturesources [48]
119883119899+1= 1 minus 119886
1003816
1003816
1003816
1003816
119883119899
1003816
1003816
1003816
1003816
+ 119887119884119899
119884119899+1= 119883119899
(5)
43 Graphical Examples Three chaotic maps were selectedfor the CPRNG concept The 119909 119910 plots of the selected mapsare depicted in Figure 1 (Burgers map) Figure 4 (delayedlogistic map) and Figure 7 (Lozi map) The chaotic behaviorof the chaotic maps represented by the examples of directoutput iterations is depicted in Figures 2 5 and 8 Finallythe illustrative histograms of the distribution of real numberstransferred into the range ⟨0-1⟩ generated by means ofchaotic maps are in Figures 3 6 and 9
5 Design of Cost Functions forChaotic System Stabilization
Theproposal of the basic cost function (CFSimple) is in generalbased on the simplest CF which could be used problem-free only for the stabilization of p-1 orbit The idea was tominimize the area created by the difference between therequired state and the real system output on the wholesimulation interval 120591
119894(6) This CF design is very convenient
for the evolutionary searching process due to the relativelyfavorable CF surface Nevertheless this simple approachhas one big disadvantage which is the including of initialchaotic transient behavior of not stabilized system into thecost function value As a result of this the very tiny changeof control method setting for extremely sensitive chaoticsystem (given by the very small change of CF value) can be
4 The Scientific World Journal
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(a)
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(b)
Figure 2 Iterations of the Burgers map (variable 119909) (a) iterations of the Burgers map (variable 119909) point-plot (b)
Value
500
1000
1500
Freq
uenc
y
02 04 06 08 10
Figure 3 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated bymeans of the chaotic Burgers map5000 samples
02
00
04
06
08
10
0200 04 06 08 10
y
x
Figure 4 119909 119910 plot of the delayed logistic map
suppressed by the aforementioned inclusion of initial chaotictransient behavior Consider
CFSimple =
120591119894
sum
119905=0
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(6)
where TS is target state and AS is actual stateDifferent type of universal cost function without any se-
lection rules is purely based on searching for the desired sta-bilized periodic orbit and thereafter calculation of the differ-ence between desired and found actual periodic orbit on theshort time interval 120591
119904(20 iterations) from the point where
the first minimal value of difference between desired andactual system output is found (ie floating window for min-imization see Figure 10)
Such a design of universal CF should secure the successfulstabilization of either p-1 orbit (stable state) or any higherperiodic orbit anywise phase shifted Furthermore due to CFvalues converging towards zero this CF also allows the useof decision rules avoiding very time demanding simulationsThis rule stops EA immediately when the first individual withgood parameter structure is reached thus the value of CF islower than the acceptable (CFacc) one Based on the numerousexperiments typically CFacc = 0001 at time interval 120591
119904= 20
iterations thus the difference between desired and actualoutput has the value of 00005 per iteration that is successfulstabilization for the used control technique The CFUNI hasthe following form
CFUNI = 1199011198901198991 +1205912
sum
119905=1205911
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(7)
where 1205911is the first min value of the difference between
TS and AS and 1205912is the end of optimization interval (120591
1+
120591119904) 119901119890119899
1= 0 if 120591
119894minus 1205912ge 120591119904 119901119890119899
1= 10 lowast (120591
119894minus 1205912) if 120591119894minus 1205912lt 120591119904
(ie late stabilization)The issue of pure searching for periodic orbits causes very
chaotic erratic and discrete type CF surfaces
The Scientific World Journal 5
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(a)
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(b)
Figure 5 Iterations of the delayed logistic (variable 119909) (a) iterations of the delayed logistic (variable 119909) point-plot (b)
200
400
600
800
1000
1200
1400
Value
Freq
uenc
y
02 04 06 08 10
Figure 6 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic delayedlogistic map 5000 samples
6 Experimental Design
This research encompasses six case studies Six different setsof discrete chaotic systems as CPRNGsto be controlled andtwo different cost functions were combined in the followingform
(i) case study 1 Burgers map as CPRNGcontrolledsystem with CFSimple
(ii) case study 2 Burgers map as CPRNGcontrolledsystem with CFUNI
(iii) case study 3 delayed logistic map as CPRNGcon-trolled system with CFSimple
(iv) case study 4 delayed logistic map as CPRNGcon-trolled system with CFUNI
(v) case study 5 Lozi map as CPRNGcontrolled systemwith CFSimple
(vi) case study 6 Lozi map as CPRNGcontrolled systemwith CFUNI
This work is focused on the utilization of the chaos drivenDE for tuning of parameters for ETDAS control method
100500minus05minus10
y
x
10
05
00
minus05
minus10
x
Figure 7 119909 119910 plot of the Lozi map
to stabilize desired unstable periodic orbits (UPO) In thedescribed research desired UPO was p-1 (stable state) Theoriginal controlmethod ETDAS in the discrete form suitablefor discrete chaotic maps has the following form
119865119899= 119870 [(1 minus 119877) 119878119899minus119898
minus 119909119899]
119878119899= 119909119899+ 119877119878119899minus119898
(8)
where119870 and119877 are adjustable constants119865 is the perturbation119878 is given by a delay equation utilizing previous states ofthe system and 119898 is the period of 119898-periodic orbit to bestabilized The perturbation 119865
119899in (8) may have arbitrarily
large value which can cause the divergence of the systemTherefore 119865
119899should have a value betweenmdash119865max and 119865max
The ranges of all evolutionary estimated parameters are givenin Table 1
6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

2 The Scientific World Journal
method [11] orminimum entropy control technique [12] EAshave been also frequently used in the task of synchronizationof chaos [13ndash15] In [16] an EA for optimizing local control ofchaos based on a Lyapunov approach is presented
Evolutionary techniques were also used for the synthesisof new complex discrete type structureswith chaotic behavior[17] as well as the synthesis (identification) of a mathematicalmodel of chaotic system based on the measured data [18]
Another example of interconnection between determin-istic chaos and EAs represents the research focused on theembedding of chaotic dynamics into the EAs Recent researchin chaos driven heuristics has been fueled with the predispo-sition that unlike stochastic approaches a chaotic approachis able to bypass local optima stagnationThis one clause is ofdeep importance to EAs A chaotic approach generally usesthe chaoticmap in the place of a pseudorandomnumber gen-erator [19] This causes the heuristic to map unique regionssince the chaotic map iterates to new regionsThe task is thento select a very good chaotic map as the pseudorandomnumber generator
The initial concept of embedding chaotic dynamics intoEAs is given in [20] Later the initial study [21]was focused onthe simple embedding of chaotic systems in the form of chaospseudorandom number generator (CPRNG) for differentialevolution (DE) [22] and self-organizing migrating algorithm(SOMA) [23] in the task of optimal PID tuning Also thePSO algorithm with elements of chaos was introduced as theCPSO [24] This field of research was later extended withthe successful experiments with chaos driven DE [25] in realdomain as well as in combinatorial problems domain [26 27]
At the same time the chaos embedded PSO with inertiaweigh strategy was closely investigated [28] followed by theintroduction of a PSO strategy driven alternately by twochaotic systems [29] and novel chaotic multiple choice PSO(chaos MC-PSO) strategy [30] Recently the chaotic fireflyalgorithm was also introduced [31]
Finally the last example represents the research focusingon the EAs and the edge of chaos An unconventional ap-proach of the edge of chaos and its application to discrete sys-tems and evolutionary algorithms in terms of stagnationavoidance is presented in [32]
The organization of this paper is as follows firstly usedevolutionary technique which is DE is described and is fol-lowed by the description of the ChaosDE conceptThereafterthe problemdesign and appropriate corresponding cost func-tions are investigated and proposed Results and conclusionfollow afterwards
2 Motivation
This paper extends the research of evolutionary chaos con-trol optimization by means of ChaosDE algorithm [33ndash35]Recent studies have shown that differential evolution [22]is one of the most potent heuristics and it has been usedfor a number of optimization tasks [36ndash38] have exploredDE for combinatorial problems [39 40] have hybridized DEwhereas [41ndash43] have developed self-adaptive DE variants
In this paper the DErand1bin strategy driven by differ-ent chaotic maps (systems) was utilized to solve the issue of
evolutionary optimization of chaos control for the very samechaotic system used as a CPRNG in the particular case studyThus the idea was to utilize the hidden chaotic dynamics inpseudorandom sequences given by chaoticmap to help differ-ential evolution algorithm search for the best controller set-tings for the very same chaotic system Since the very positivecontribution of the chaotic dynamics to the performance ofDE in the task of evolutionary chaos control optimizationwasproven in comparison with original canonical DE within theinitial study [44] this paper is not primarily focused on theperformance comparisons with different heuristic But thisresearch extends the initial work with the aforementionedidea and with the several case studies combining differentchaotic systems and different utilized cost functions
3 Used Heuristic Differential Evolution (DE)
DE is a simple and powerful population-based optimizationmethod that works either on real-number-coded individualsor with small modifications on discrete type individuals [2245 46] DE is quite robust fast and effective with globaloptimization abilityThis global optimization ability has beenproven in many interdisciplinary researches It works welleven with noisy and time-dependent objective functionsThecanonical basic principle is as follows
For each individual 119894119866
in the current generation G DEgenerates a new trial individual 1015840
119894119866by adding the weighted
difference between two randomly selected individuals 1199031119866
and 1199032119866
to a randomly selected third individual 1199033119866
Theresulting individual 1015840
119894119866is crossed over with the original
individual 119894119866Thefitness of the resulting individual referred
to as a perturbed vector 119894119866+1
is then compared with thefitness of
119894119866 If the fitness of
119894119866+1is greater than the
fitness of 119894119866 then
119894119866is replaced with
119894119866+1 otherwise
119894119866
remains in the population as 119894119866+1
Please refer to (1) for notation of crossover and to [22] for
the detailed description of used DERand1Bin strategy and allother DE strategies
119906119894119866+1= 1199091199031119866+ 119865 sdot (119909
1199032119866minus 1199091199033119866) (1)
4 Concept of ChaosDE
This section contains the description of discrete dissipativechaotic maps which can be used as the chaotic pseudoran-dom generators for DE as well as the main principle of theChaosDE concept In this research direct output iterations ofthe chaoticmapswere used for the generation of real numbersin the process of crossover based on the user definedCR valueand for the generation of the integer values used for selectionof individuals
41 Chaotic Pseudorandom Number Generator The generalidea of ChaosDE and CPRNG is to replace the default PRNGwith the discrete chaotic map As the discrete chaotic mapis a set of equations with a static start position we created arandom start position of the map in order to have differentstart position for different experiments (runs of EAs) This
The Scientific World Journal 3
random position is initialized with the default PRNG as aone-off randomizer Once the start position of the chaoticmap has been obtained the map generates the next sequenceusing its current position
The first possible way is to generate and store a long datasequence (approximately 50ndash500 thousands numbers) duringthe evolutionary process initialization and keep the pointer tothe actual used value in the memory In case of the using upof the whole sequence the new one will be generated with thelast known value as the new initial one
The second approach is that the chaotic map is notreinitialized during the experiment and any long data seriesis not stored thus it is imperative to keep the current state ofthe map in memory to obtain the new output values
As two different types of numbers are required inChaosDE real and integers the use of modulo operators isused to obtain values between the specified ranges as givenin the following equations (2)
rndreal = mod (abs (rndChaos) 10)
rndint = mod (abs (rndChaos) 10) times Range + 1(2)
where abs refers to the absolute portion of the chaotic mapgenerated number rndChaos mod is the modulo operatorand Range specifies the value (inclusive) till where thenumber is to be scaled
42 Selected Chaotic Systems This subsection contains themathematical and graphical description of the three selecteddiscrete dissipative systems which served both as forCPRNGs and also as the examples of systems to be evolution-ary controlled
421 Burgers Map The Burgers mapping is a discretizationof a pair of coupled differential equations which were used byBurgers to illustrate the relevance of the concept of bifurca-tion to the study of hydrodynamics flowsThemap equationsare given in (3) with control parameters 119886 = 075 and 119887 = 175as suggested in [47]
119883119899+1= 119886119883119899minus 119884
2
119899
119884119899+1= 119887119884119899+ 119883119899119884119899
(3)
422 Delayed Logistic The delayed logistic is a simple two-dimensional discrete system similar to the one-dimensionallogistic equation The map equations are given in (4) Theparameter used in this work is 119860 = 227 as also suggestedin [47]
119883119899+1= 119860119883
119899(1 minus 119884
119899)
119884119899+1= 119883119899
(4)
423 Lozi Map The Lozi map is a simple discrete two-dimensional chaoticmapThemap equations are given in (5)The parameters used in this work are as follows 119886 = 17 and119887 = 05 as suggested in [47] For these values the systemexhibits typical chaotic behavior and with this parameter
10
05
00
minus05
minus10
minus25 minus20 minus15 minus10 minus05 00
y
x
Figure 1 119909 119910 plot of the Burgers map
setting it is used in most research papers and other literaturesources [48]
119883119899+1= 1 minus 119886
1003816
1003816
1003816
1003816
119883119899
1003816
1003816
1003816
1003816
+ 119887119884119899
119884119899+1= 119883119899
(5)
43 Graphical Examples Three chaotic maps were selectedfor the CPRNG concept The 119909 119910 plots of the selected mapsare depicted in Figure 1 (Burgers map) Figure 4 (delayedlogistic map) and Figure 7 (Lozi map) The chaotic behaviorof the chaotic maps represented by the examples of directoutput iterations is depicted in Figures 2 5 and 8 Finallythe illustrative histograms of the distribution of real numberstransferred into the range ⟨0-1⟩ generated by means ofchaotic maps are in Figures 3 6 and 9
5 Design of Cost Functions forChaotic System Stabilization
Theproposal of the basic cost function (CFSimple) is in generalbased on the simplest CF which could be used problem-free only for the stabilization of p-1 orbit The idea was tominimize the area created by the difference between therequired state and the real system output on the wholesimulation interval 120591
119894(6) This CF design is very convenient
for the evolutionary searching process due to the relativelyfavorable CF surface Nevertheless this simple approachhas one big disadvantage which is the including of initialchaotic transient behavior of not stabilized system into thecost function value As a result of this the very tiny changeof control method setting for extremely sensitive chaoticsystem (given by the very small change of CF value) can be
4 The Scientific World Journal
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(a)
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(b)
Figure 2 Iterations of the Burgers map (variable 119909) (a) iterations of the Burgers map (variable 119909) point-plot (b)
Value
500
1000
1500
Freq
uenc
y
02 04 06 08 10
Figure 3 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated bymeans of the chaotic Burgers map5000 samples
02
00
04
06
08
10
0200 04 06 08 10
y
x
Figure 4 119909 119910 plot of the delayed logistic map
suppressed by the aforementioned inclusion of initial chaotictransient behavior Consider
CFSimple =
120591119894
sum
119905=0
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(6)
where TS is target state and AS is actual stateDifferent type of universal cost function without any se-
lection rules is purely based on searching for the desired sta-bilized periodic orbit and thereafter calculation of the differ-ence between desired and found actual periodic orbit on theshort time interval 120591
119904(20 iterations) from the point where
the first minimal value of difference between desired andactual system output is found (ie floating window for min-imization see Figure 10)
Such a design of universal CF should secure the successfulstabilization of either p-1 orbit (stable state) or any higherperiodic orbit anywise phase shifted Furthermore due to CFvalues converging towards zero this CF also allows the useof decision rules avoiding very time demanding simulationsThis rule stops EA immediately when the first individual withgood parameter structure is reached thus the value of CF islower than the acceptable (CFacc) one Based on the numerousexperiments typically CFacc = 0001 at time interval 120591
119904= 20
iterations thus the difference between desired and actualoutput has the value of 00005 per iteration that is successfulstabilization for the used control technique The CFUNI hasthe following form
CFUNI = 1199011198901198991 +1205912
sum
119905=1205911
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(7)
where 1205911is the first min value of the difference between
TS and AS and 1205912is the end of optimization interval (120591
1+
120591119904) 119901119890119899
1= 0 if 120591
119894minus 1205912ge 120591119904 119901119890119899
1= 10 lowast (120591
119894minus 1205912) if 120591119894minus 1205912lt 120591119904
(ie late stabilization)The issue of pure searching for periodic orbits causes very
chaotic erratic and discrete type CF surfaces
The Scientific World Journal 5
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(a)
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(b)
Figure 5 Iterations of the delayed logistic (variable 119909) (a) iterations of the delayed logistic (variable 119909) point-plot (b)
200
400
600
800
1000
1200
1400
Value
Freq
uenc
y
02 04 06 08 10
Figure 6 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic delayedlogistic map 5000 samples
6 Experimental Design
This research encompasses six case studies Six different setsof discrete chaotic systems as CPRNGsto be controlled andtwo different cost functions were combined in the followingform
(i) case study 1 Burgers map as CPRNGcontrolledsystem with CFSimple
(ii) case study 2 Burgers map as CPRNGcontrolledsystem with CFUNI
(iii) case study 3 delayed logistic map as CPRNGcon-trolled system with CFSimple
(iv) case study 4 delayed logistic map as CPRNGcon-trolled system with CFUNI
(v) case study 5 Lozi map as CPRNGcontrolled systemwith CFSimple
(vi) case study 6 Lozi map as CPRNGcontrolled systemwith CFUNI
This work is focused on the utilization of the chaos drivenDE for tuning of parameters for ETDAS control method
100500minus05minus10
y
x
10
05
00
minus05
minus10
x
Figure 7 119909 119910 plot of the Lozi map
to stabilize desired unstable periodic orbits (UPO) In thedescribed research desired UPO was p-1 (stable state) Theoriginal controlmethod ETDAS in the discrete form suitablefor discrete chaotic maps has the following form
119865119899= 119870 [(1 minus 119877) 119878119899minus119898
minus 119909119899]
119878119899= 119909119899+ 119877119878119899minus119898
(8)
where119870 and119877 are adjustable constants119865 is the perturbation119878 is given by a delay equation utilizing previous states ofthe system and 119898 is the period of 119898-periodic orbit to bestabilized The perturbation 119865
119899in (8) may have arbitrarily
large value which can cause the divergence of the systemTherefore 119865
119899should have a value betweenmdash119865max and 119865max
The ranges of all evolutionary estimated parameters are givenin Table 1
6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

The Scientific World Journal 3
random position is initialized with the default PRNG as aone-off randomizer Once the start position of the chaoticmap has been obtained the map generates the next sequenceusing its current position
The first possible way is to generate and store a long datasequence (approximately 50ndash500 thousands numbers) duringthe evolutionary process initialization and keep the pointer tothe actual used value in the memory In case of the using upof the whole sequence the new one will be generated with thelast known value as the new initial one
The second approach is that the chaotic map is notreinitialized during the experiment and any long data seriesis not stored thus it is imperative to keep the current state ofthe map in memory to obtain the new output values
As two different types of numbers are required inChaosDE real and integers the use of modulo operators isused to obtain values between the specified ranges as givenin the following equations (2)
rndreal = mod (abs (rndChaos) 10)
rndint = mod (abs (rndChaos) 10) times Range + 1(2)
where abs refers to the absolute portion of the chaotic mapgenerated number rndChaos mod is the modulo operatorand Range specifies the value (inclusive) till where thenumber is to be scaled
42 Selected Chaotic Systems This subsection contains themathematical and graphical description of the three selecteddiscrete dissipative systems which served both as forCPRNGs and also as the examples of systems to be evolution-ary controlled
421 Burgers Map The Burgers mapping is a discretizationof a pair of coupled differential equations which were used byBurgers to illustrate the relevance of the concept of bifurca-tion to the study of hydrodynamics flowsThemap equationsare given in (3) with control parameters 119886 = 075 and 119887 = 175as suggested in [47]
119883119899+1= 119886119883119899minus 119884
2
119899
119884119899+1= 119887119884119899+ 119883119899119884119899
(3)
422 Delayed Logistic The delayed logistic is a simple two-dimensional discrete system similar to the one-dimensionallogistic equation The map equations are given in (4) Theparameter used in this work is 119860 = 227 as also suggestedin [47]
119883119899+1= 119860119883
119899(1 minus 119884
119899)
119884119899+1= 119883119899
(4)
423 Lozi Map The Lozi map is a simple discrete two-dimensional chaoticmapThemap equations are given in (5)The parameters used in this work are as follows 119886 = 17 and119887 = 05 as suggested in [47] For these values the systemexhibits typical chaotic behavior and with this parameter
10
05
00
minus05
minus10
minus25 minus20 minus15 minus10 minus05 00
y
x
Figure 1 119909 119910 plot of the Burgers map
setting it is used in most research papers and other literaturesources [48]
119883119899+1= 1 minus 119886
1003816
1003816
1003816
1003816
119883119899
1003816
1003816
1003816
1003816
+ 119887119884119899
119884119899+1= 119883119899
(5)
43 Graphical Examples Three chaotic maps were selectedfor the CPRNG concept The 119909 119910 plots of the selected mapsare depicted in Figure 1 (Burgers map) Figure 4 (delayedlogistic map) and Figure 7 (Lozi map) The chaotic behaviorof the chaotic maps represented by the examples of directoutput iterations is depicted in Figures 2 5 and 8 Finallythe illustrative histograms of the distribution of real numberstransferred into the range ⟨0-1⟩ generated by means ofchaotic maps are in Figures 3 6 and 9
5 Design of Cost Functions forChaotic System Stabilization
Theproposal of the basic cost function (CFSimple) is in generalbased on the simplest CF which could be used problem-free only for the stabilization of p-1 orbit The idea was tominimize the area created by the difference between therequired state and the real system output on the wholesimulation interval 120591
119894(6) This CF design is very convenient
for the evolutionary searching process due to the relativelyfavorable CF surface Nevertheless this simple approachhas one big disadvantage which is the including of initialchaotic transient behavior of not stabilized system into thecost function value As a result of this the very tiny changeof control method setting for extremely sensitive chaoticsystem (given by the very small change of CF value) can be
4 The Scientific World Journal
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(a)
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(b)
Figure 2 Iterations of the Burgers map (variable 119909) (a) iterations of the Burgers map (variable 119909) point-plot (b)
Value
500
1000
1500
Freq
uenc
y
02 04 06 08 10
Figure 3 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated bymeans of the chaotic Burgers map5000 samples
02
00
04
06
08
10
0200 04 06 08 10
y
x
Figure 4 119909 119910 plot of the delayed logistic map
suppressed by the aforementioned inclusion of initial chaotictransient behavior Consider
CFSimple =
120591119894
sum
119905=0
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(6)
where TS is target state and AS is actual stateDifferent type of universal cost function without any se-
lection rules is purely based on searching for the desired sta-bilized periodic orbit and thereafter calculation of the differ-ence between desired and found actual periodic orbit on theshort time interval 120591
119904(20 iterations) from the point where
the first minimal value of difference between desired andactual system output is found (ie floating window for min-imization see Figure 10)
Such a design of universal CF should secure the successfulstabilization of either p-1 orbit (stable state) or any higherperiodic orbit anywise phase shifted Furthermore due to CFvalues converging towards zero this CF also allows the useof decision rules avoiding very time demanding simulationsThis rule stops EA immediately when the first individual withgood parameter structure is reached thus the value of CF islower than the acceptable (CFacc) one Based on the numerousexperiments typically CFacc = 0001 at time interval 120591
119904= 20
iterations thus the difference between desired and actualoutput has the value of 00005 per iteration that is successfulstabilization for the used control technique The CFUNI hasthe following form
CFUNI = 1199011198901198991 +1205912
sum
119905=1205911
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(7)
where 1205911is the first min value of the difference between
TS and AS and 1205912is the end of optimization interval (120591
1+
120591119904) 119901119890119899
1= 0 if 120591
119894minus 1205912ge 120591119904 119901119890119899
1= 10 lowast (120591
119894minus 1205912) if 120591119894minus 1205912lt 120591119904
(ie late stabilization)The issue of pure searching for periodic orbits causes very
chaotic erratic and discrete type CF surfaces
The Scientific World Journal 5
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(a)
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(b)
Figure 5 Iterations of the delayed logistic (variable 119909) (a) iterations of the delayed logistic (variable 119909) point-plot (b)
200
400
600
800
1000
1200
1400
Value
Freq
uenc
y
02 04 06 08 10
Figure 6 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic delayedlogistic map 5000 samples
6 Experimental Design
This research encompasses six case studies Six different setsof discrete chaotic systems as CPRNGsto be controlled andtwo different cost functions were combined in the followingform
(i) case study 1 Burgers map as CPRNGcontrolledsystem with CFSimple
(ii) case study 2 Burgers map as CPRNGcontrolledsystem with CFUNI
(iii) case study 3 delayed logistic map as CPRNGcon-trolled system with CFSimple
(iv) case study 4 delayed logistic map as CPRNGcon-trolled system with CFUNI
(v) case study 5 Lozi map as CPRNGcontrolled systemwith CFSimple
(vi) case study 6 Lozi map as CPRNGcontrolled systemwith CFUNI
This work is focused on the utilization of the chaos drivenDE for tuning of parameters for ETDAS control method
100500minus05minus10
y
x
10
05
00
minus05
minus10
x
Figure 7 119909 119910 plot of the Lozi map
to stabilize desired unstable periodic orbits (UPO) In thedescribed research desired UPO was p-1 (stable state) Theoriginal controlmethod ETDAS in the discrete form suitablefor discrete chaotic maps has the following form
119865119899= 119870 [(1 minus 119877) 119878119899minus119898
minus 119909119899]
119878119899= 119909119899+ 119877119878119899minus119898
(8)
where119870 and119877 are adjustable constants119865 is the perturbation119878 is given by a delay equation utilizing previous states ofthe system and 119898 is the period of 119898-periodic orbit to bestabilized The perturbation 119865
119899in (8) may have arbitrarily
large value which can cause the divergence of the systemTherefore 119865
119899should have a value betweenmdash119865max and 119865max
The ranges of all evolutionary estimated parameters are givenin Table 1
6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

4 The Scientific World Journal
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(a)
0 50 100 150 200
00
Iteration
minus05
minus10
minus15
minus20
x
(b)
Figure 2 Iterations of the Burgers map (variable 119909) (a) iterations of the Burgers map (variable 119909) point-plot (b)
Value
500
1000
1500
Freq
uenc
y
02 04 06 08 10
Figure 3 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated bymeans of the chaotic Burgers map5000 samples
02
00
04
06
08
10
0200 04 06 08 10
y
x
Figure 4 119909 119910 plot of the delayed logistic map
suppressed by the aforementioned inclusion of initial chaotictransient behavior Consider
CFSimple =
120591119894
sum
119905=0
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(6)
where TS is target state and AS is actual stateDifferent type of universal cost function without any se-
lection rules is purely based on searching for the desired sta-bilized periodic orbit and thereafter calculation of the differ-ence between desired and found actual periodic orbit on theshort time interval 120591
119904(20 iterations) from the point where
the first minimal value of difference between desired andactual system output is found (ie floating window for min-imization see Figure 10)
Such a design of universal CF should secure the successfulstabilization of either p-1 orbit (stable state) or any higherperiodic orbit anywise phase shifted Furthermore due to CFvalues converging towards zero this CF also allows the useof decision rules avoiding very time demanding simulationsThis rule stops EA immediately when the first individual withgood parameter structure is reached thus the value of CF islower than the acceptable (CFacc) one Based on the numerousexperiments typically CFacc = 0001 at time interval 120591
119904= 20
iterations thus the difference between desired and actualoutput has the value of 00005 per iteration that is successfulstabilization for the used control technique The CFUNI hasthe following form
CFUNI = 1199011198901198991 +1205912
sum
119905=1205911
1003816
1003816
1003816
1003816
TS119905minus AS119905
1003816
1003816
1003816
1003816
(7)
where 1205911is the first min value of the difference between
TS and AS and 1205912is the end of optimization interval (120591
1+
120591119904) 119901119890119899
1= 0 if 120591
119894minus 1205912ge 120591119904 119901119890119899
1= 10 lowast (120591
119894minus 1205912) if 120591119894minus 1205912lt 120591119904
(ie late stabilization)The issue of pure searching for periodic orbits causes very
chaotic erratic and discrete type CF surfaces
The Scientific World Journal 5
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(a)
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(b)
Figure 5 Iterations of the delayed logistic (variable 119909) (a) iterations of the delayed logistic (variable 119909) point-plot (b)
200
400
600
800
1000
1200
1400
Value
Freq
uenc
y
02 04 06 08 10
Figure 6 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic delayedlogistic map 5000 samples
6 Experimental Design
This research encompasses six case studies Six different setsof discrete chaotic systems as CPRNGsto be controlled andtwo different cost functions were combined in the followingform
(i) case study 1 Burgers map as CPRNGcontrolledsystem with CFSimple
(ii) case study 2 Burgers map as CPRNGcontrolledsystem with CFUNI
(iii) case study 3 delayed logistic map as CPRNGcon-trolled system with CFSimple
(iv) case study 4 delayed logistic map as CPRNGcon-trolled system with CFUNI
(v) case study 5 Lozi map as CPRNGcontrolled systemwith CFSimple
(vi) case study 6 Lozi map as CPRNGcontrolled systemwith CFUNI
This work is focused on the utilization of the chaos drivenDE for tuning of parameters for ETDAS control method
100500minus05minus10
y
x
10
05
00
minus05
minus10
x
Figure 7 119909 119910 plot of the Lozi map
to stabilize desired unstable periodic orbits (UPO) In thedescribed research desired UPO was p-1 (stable state) Theoriginal controlmethod ETDAS in the discrete form suitablefor discrete chaotic maps has the following form
119865119899= 119870 [(1 minus 119877) 119878119899minus119898
minus 119909119899]
119878119899= 119909119899+ 119877119878119899minus119898
(8)
where119870 and119877 are adjustable constants119865 is the perturbation119878 is given by a delay equation utilizing previous states ofthe system and 119898 is the period of 119898-periodic orbit to bestabilized The perturbation 119865
119899in (8) may have arbitrarily
large value which can cause the divergence of the systemTherefore 119865
119899should have a value betweenmdash119865max and 119865max
The ranges of all evolutionary estimated parameters are givenin Table 1
6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
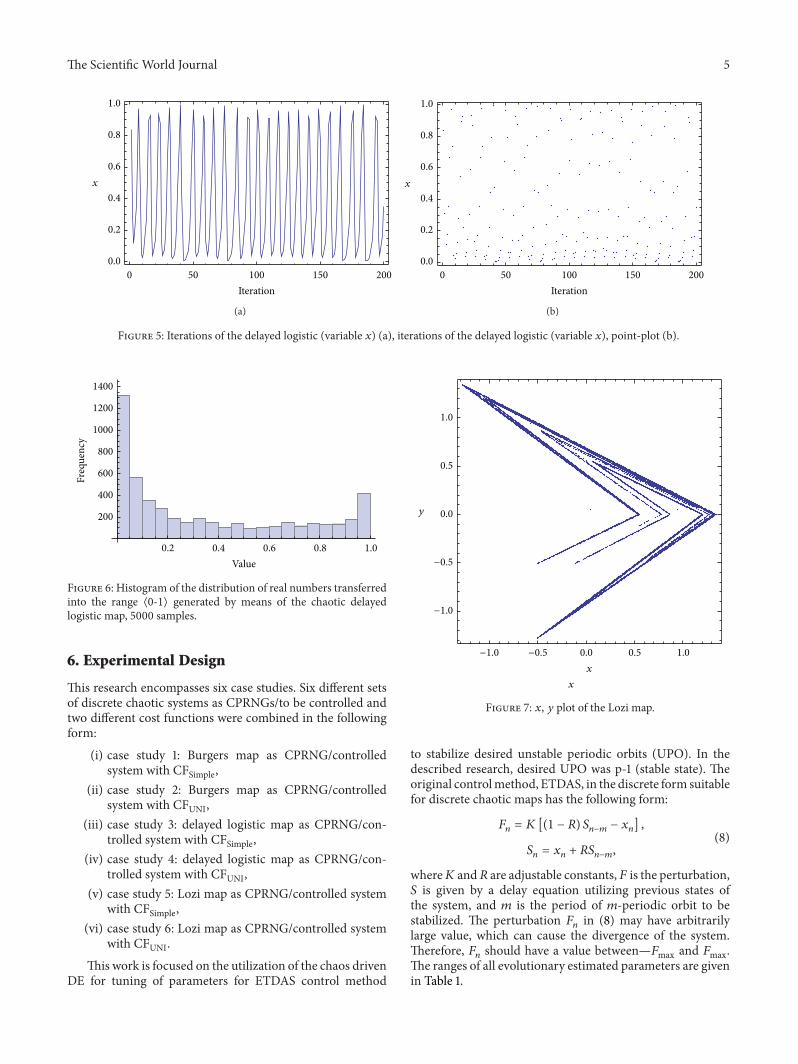
The Scientific World Journal 5
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(a)
0 50 100 150 20000
02
04
06
08
10
Iteration
x
(b)
Figure 5 Iterations of the delayed logistic (variable 119909) (a) iterations of the delayed logistic (variable 119909) point-plot (b)
200
400
600
800
1000
1200
1400
Value
Freq
uenc
y
02 04 06 08 10
Figure 6 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic delayedlogistic map 5000 samples
6 Experimental Design
This research encompasses six case studies Six different setsof discrete chaotic systems as CPRNGsto be controlled andtwo different cost functions were combined in the followingform
(i) case study 1 Burgers map as CPRNGcontrolledsystem with CFSimple
(ii) case study 2 Burgers map as CPRNGcontrolledsystem with CFUNI
(iii) case study 3 delayed logistic map as CPRNGcon-trolled system with CFSimple
(iv) case study 4 delayed logistic map as CPRNGcon-trolled system with CFUNI
(v) case study 5 Lozi map as CPRNGcontrolled systemwith CFSimple
(vi) case study 6 Lozi map as CPRNGcontrolled systemwith CFUNI
This work is focused on the utilization of the chaos drivenDE for tuning of parameters for ETDAS control method
100500minus05minus10
y
x
10
05
00
minus05
minus10
x
Figure 7 119909 119910 plot of the Lozi map
to stabilize desired unstable periodic orbits (UPO) In thedescribed research desired UPO was p-1 (stable state) Theoriginal controlmethod ETDAS in the discrete form suitablefor discrete chaotic maps has the following form
119865119899= 119870 [(1 minus 119877) 119878119899minus119898
minus 119909119899]
119878119899= 119909119899+ 119877119878119899minus119898
(8)
where119870 and119877 are adjustable constants119865 is the perturbation119878 is given by a delay equation utilizing previous states ofthe system and 119898 is the period of 119898-periodic orbit to bestabilized The perturbation 119865
119899in (8) may have arbitrarily
large value which can cause the divergence of the systemTherefore 119865
119899should have a value betweenmdash119865max and 119865max
The ranges of all evolutionary estimated parameters are givenin Table 1
6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

6 The Scientific World Journal
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(a)
0 50 100 150 200Iteration
10
05
00
minus05
minus10
x
(b)
Figure 8 Iterations of the Lozi map (variable 119909) (a) iterations of the Lozi map (variable 119909) point-plot (b)
100
200
300
400
Value
Freq
uenc
y
02 04 06 08 10
Figure 9 Histogram of the distribution of real numbers transferredinto the range ⟨0-1⟩ generated by means of the chaotic Lozi map5000 samples
x
1205911 1205912 = 1205911 + 120591s
Iteration
15
10
05
00
minus05
minus10
0 50 100 150 200
Figure 10 ldquoFloating windowrdquo for minimization
Within the research a total number of 50 simulationswith ChaosDE were carried out for each case study The pa-rameter settings for ChaosDE were obtained analyticallybased on numerous experiments and simulations (see
Table 1 Estimated parameters
Parameter Min Max119870 minus2 2119877 0 099119865max 0 09
Table 2 DE settings
Parameter ValuePopulation size 25119865 08Cr 08Generations 250Max cost function evaluations (CFE) 6250
Table 2) Experiments were performed in an environmentof Wolfram Mathematica PRNG operations therefore usedthe built-in Mathematica software pseudorandom numbergenerator All experiments used different initialization thatis different initial population was generated in each run ofchaos driven DE
7 Results
All simulations were successful and have given new optimalsettings for ETDAS control method securing the fast sta-bilization of the chaotic system at required behaviour (p-1orbit) Tables 4 5 6 7 8 and 9 contain the simple statisticaloverview of optimizationsimulation results aswell as the bestfounded individual solutions of parameters setup for ETDAScontrol method corresponding final CF value also the IstabValue representing the number of iterations required forstabilization on desired UPO and further the average errorbetween desired output value and real systemoutput from thelast 20 iterations
Graphical simulation outputs of the best individual solu-tions for particular case studies are depicted in Figures 11 13and 15 whereas Figures 12 14 and 16 show the simulation
The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

The Scientific World Journal 7
0 20 40 60 80 100Iteration
05
00
minus05
minus10
x
Burgers map-CFSimple-best solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-best solution
(b)
Figure 11 Simulation of the best individual solution ChaosDE and Burgers map case study 1CFSimple (a) case study 2 CFUNI (b)
0 20 40 60 80 100
05
00
minus05
minus10
x
Iteration
Burgers map-CFSimple-all solution
(a)
0 20 40 60 80 100
05
00
minus05
minus10
minus15
minus20
x
Iteration
Burgers map-CFUNI-all solution
(b)
Figure 12 Simulation of all the 50 independent runs of EA ChaosDE and Burgers map case study 2 CFSimple (a) case study 1 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-best solution
(b)
Figure 13 Simulation of the best individual solution ChaosDE and delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

8 The Scientific World Journal
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
07
06
05
04
Delayed logistic-CFUNI-all solution
(b)
Figure 14 Simulation of all the 50 independent runs of EA ChaosDE and Delayed logistic case study 3 CFSimple (a) case study 4 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-best solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-best solution
(b)
Figure 15 Simulation of the best individual solution ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFSimple-all solution
(a)
0 10 20 30 40 50Iteration
x
08
06
04
02
Lozi map-CFUNI-all solution
(b)
Figure 16 Simulation of the all 50 independent runs of EA ChaosDE and Lozi map case study 5 CFSimple (a) case study 6 CFUNI (b)
The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

The Scientific World Journal 9
Table 3 The values for p-1 UPO
Chaotic system Values of p-1 UPO of unperturbed systemBurgers map 119909
119865= minus07499
Delayed logistic map 119909119865= 0559471
Lozi map 119909119865= 0454545
Table 4 Simple CF statistics joined case studies 1 and 2 Burgersmap as CPRNGcontrolled system
Statistical dataCase study 1CFsimple
Case study 2CFUNI
CF value CF valueMin 216199 105 sdot 10minus6
Max 216199 00103Average 216199 667 sdot 10minus4
Median 216199 532 sdot 10minus7
Std dev 558 sdot 10minus11 189 sdot 10minus3
Average full stab (iteration) 45 35
output of all 50 runs of ChaosDE thus confirming therobustness of this approach For the illustrative purposesall graphical simulations outputs are depicted only for thevariable 119909 of the chaotic systems
The values for desired p-1 UPOs (fixed points) of unper-turbed chaotic systems based on themathematical analysis ofthe systems are given in Table 3
From the results presented in the Tables 4ndash9 it followsthat the CF-simple is very convenient for evolutionaryprocess which means that repeated runs of EA are givingidentical optimal results (ie very close to the possible globalextreme) This is graphically confirmed in Figures 12 14 and16 which show all 50 simulations All the runs are basicallymerged into one line
On the other hand the disadvantage of including of initialchaotic transient behavior of not stabilized system into thecost function value and subsequent resulting very tiny changeof control method setting for extremely sensitive chaotic sys-tem is causing suppression of stabilization speed and numer-ical precision
Results obtained in the cases utilizing the CFUNI lendweight to the argument that the technique of pure searchingfor periodic orbits is advantageous for faster andmore precisestabilization of chaotic system
8 Conclusions
Based on obtained results it may be claimed that the pre-sented ChaosDE driven by selected discrete dissipativechaotic systems has given satisfactory results in the chaoscontrol optimization issue
The results show that the embedding of the chaotic dy-namics in the form of chaotic pseudorandom number gen-erator into the differential evolution algorithm may help toimprove the performance and robustness of theDEChaosDEis able to obtain optimal solutions securing the very fast andprecise stabilization for both convenient CF surface in case of
Table 5 Characteristics of the best solution joined case studies 1and 2 Burgers map as CPRNGcontrolled system
ParameterCase study 1CFsimple
Case study 2CFUNI
Value Value119870 122847 0732498119865max 09 048495119877 0574997 0811742CF value 216199 105 sdot 10minus6
Istab Value 45 25Average error per iteration 586 sdot 10minus5 121 sdot 10minus8
Table 6 Simple CF statistics joined case studies 3 and 4 delayedlogistic as CPRNGcontrolled system
Statistical dataCase study 3
CFsimple
Case study 4CFUNI
CF value CF valueMin 0199798 23 sdot 10minus15
Max 0199798 27 sdot 10minus15
Average 0199798 244222 sdot 10minus15
Median 0199798 240551 sdot 10minus15
Std dev 511 sdot 10minus16 904629 sdot 10minus17
Average full stab (iteration) 10 75
Table 7 Characteristics of the best solution joined case studies 3and 4 delayed logistic as CPRNGcontrolled system
ParameterCase study 3
CFsimple
Case study 4CFUNI
Value Value119870 129837 131355119865max 0394579 0336294119877 001 0010219CF value 0199798 23 sdot 10minus15
Istab Value 10 8Average error per iteration 222 sdot 10minus17 0
Table 8 Simple CF statistics joined case studies 5 and 6 Lozi mapas CPRNGcontrolled system
Statistical dataCase study 5
CFsimple
Case study 6CFUNI
CF value CF valueMin 0520639 35331 sdot 10minus15
Max 0520639 40551 sdot 10minus15
Average 0520639 38063 sdot 10minus15
Median 0520639 36352 sdot 10minus16
Std dev 241 sdot 10minus15 119 sdot 10minus16
Average full stab (iteration) 32 11
the CF-simple as well as for the very chaotic and nonlinearCF surface in case of the CF-universal
When comparing both the CF designs the CF-simpleis very convenient for evolutionary process (ie repeated
10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

10 The Scientific World Journal
Table 9 Characteristics of the best solution joined case studies 5and 6 Lozi map as CPRNGcontrolled system
ParameterCase study 5
CFsimple
Case study 6CFUNI
Value Value119870 minus111259 minus0859989119865max 09 0643099119877 0289232 0065669CF value 0520639 35331 sdot 10minus15
Istab Value 21 9Average error per iteration 721 sdot 10minus15 0
runs are giving identical optimal results) but it has manylimitations
The second universal CF design brings the possibility ofusing it problem free for any desired behavior of arbitrarychaotic systems but at the cost of the highly chaotic CFsurface Nevertheless the embedding of the chaotic dynamicsinto the evolutionary algorithms helped to deal with such anissue
The primary aim of this work was not to develop any newpseudorandom number generator which should normallypass many statistical tests but to show that through embed-ding the hidden chaotic dynamics into the evolutionaryprocess in the form of chaotic pseudorandom number gen-erators may help to obtain better results and avoid problemsconnected with evolutionary computation such as prematureconvergence and stagnation in local extremes
Future plans include testing of different chaotic systemseither manually or evolutionary tuning of parameters ofchaotic maps further complex comparisons with differentheuristics and obtaining a large number of results to performstatistical tests
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Grant Agency of the CzechRepublic GACR P1031308195S partially supported byGrant of SGS nos SP2014159 and SP2014170 VSB-TechnicalUniversity of Ostrava Czech Republic and by the Develop-ment of Human Resources in Research and Developmentof Latest Soft Computing Methods and Their Applicationin Practice Project Registry no CZ1072300200072funded by Operational Programme Education for Compet-itiveness and cofinanced by ESF and state budget of theCzech Republic it was further supported by the EuropeanRegional Development Fund under the Project CEBIA-Tech no CZ1052100030089 and by the Internal GrantAgency of Tomas Bata University under the Project noIGAFAI2014010
References
[1] E Ott C Grebogi and J A Yorke ldquoControlling chaosrdquo PhysicalReview Letters vol 64 no 11 pp 1196ndash1199 1990
[2] I Zelinka ldquoReal-time deterministic chaos control by means ofselected evolutionary techniquesrdquo Engineering Applications ofArtificial Intelligence vol 22 no 2 pp 283ndash297 2009
[3] I Zelinka R Senkerik and E Navratil ldquoInvestigation on evo-lutionary optimization of chaos controlrdquo Chaos Solitons andFractals vol 40 no 1 pp 111ndash129 2009
[4] R Senkerik I ZelinkaDDavendra andZOplatkova ldquoUtiliza-tion of SOMA and differential evolution for robust stabilizationof chaotic Logistic equationrdquo Computers amp Mathematics withApplications vol 60 no 4 pp 1026ndash1037 2010
[5] K Pyragas ldquoControl of chaos via extended delay feedbackrdquoPhysics Letters A vol 206 no 5-6 pp 323ndash330 1995
[6] W Just ldquoPrinciples of time delayed feedback controlrdquo inHand-book of Chaos Control H G Schuster Ed Wiley- Vch 1999
[7] R Senkerik Z Oplatkova I Zelinka and D Davendra ldquoSyn-thesis of feedback controller for three selected chaotic systemsby means of evolutionary techniques analytic programmingrdquoMathematical and Computer Modelling vol 57 no 1-2 pp 57ndash67 2013
[8] Z Kominkova Oplatkova R Senkerik I Zelinka and MPluhacek ldquoAnalytic programming in the task of evolutionarysynthesis of a controller for high order oscillations stabilizationof discrete chaotic systemsrdquo Computers and Mathematics withApplications vol 66 no 2 pp 177ndash189 2013
[9] K Pyragas ldquoContinuous control of chaos by self-controllingfeedbackrdquo Physics Letters A vol 170 no 6 pp 421ndash428 1992
[10] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Wash USA December1995
[11] MAbedini R Vatankhah andNAssadian ldquoStabilizing chaoticsystem on periodic orbits using multi-interval and modernoptimal control strategiesrdquo Communications in Nonlinear Sci-ence and Numerical Simulation vol 17 no 10 pp 3832ndash38422012
[12] M Sadeghpour H Salarieh G Vossoughi and A AlastyldquoMulti-variable control of chaos using PSO-based minimumentropy controlrdquo Communications in Nonlinear Science andNumerical Simulation vol 16 no 6 pp 2397ndash2404 2011
[13] L D S Coelho and R B Grebogi ldquoChaotic synchronizationusing PID control combinedwith population based incrementallearning algorithmrdquo Expert Systems with Applications vol 37no 7 pp 5347ndash5352 2010
[14] M J Shirazi R Vatankhah M Boroushaki H Salarieh andA Alasty ldquoApplication of particle swarm optimization in chaossynchronization in noisy environment in presence of unknownparameter uncertaintyrdquo Communications in Nonlinear Scienceand Numerical Simulation vol 17 no 2 pp 742ndash753 2012
[15] I Zelinka and A Raidl ldquoEvolutionary synchronization ofchaotic systemsrdquo in Evolutionary Algorithms and Chaotic Sys-tems I Zelinka S Celikovsky H Richter and G Chen Edsvol 267 pp 385ndash407 Springer Berlin Germany 2010
[16] H Richter and K J Reinschke ldquoOptimization of local controlof chaos by an evolutionary algorithmrdquo Physica D NonlinearPhenomena vol 144 no 3-4 pp 309ndash334 2000
[17] I Zelinka G Chen and S Celikovsky ldquoChaos synthesis bymeans of evolutionary algorithmsrdquo International Journal of
The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

The Scientific World Journal 11
Bifurcation and Chaos in Applied Sciences and Engineering vol18 no 4 pp 911ndash942 2008
[18] I Zelinka M Chadli D Davendra R Senkerik and R JasekldquoAn investigation on evolutionary reconstruction of continuouschaotic systemsrdquoMathematical andComputerModelling vol 57no 1-2 pp 2ndash15 2013
[19] I Aydin M Karakose and E Akin ldquoChaotic-based hybridnegative selection algorithm and its applications in fault andanomaly detectionrdquo Expert Systems with Applications vol 37no 7 pp 5285ndash5294 2010
[20] R Caponetto L Fortuna S Fazzino andMGXibilia ldquoChaoticsequences to improve the performance of evolutionary algo-rithmsrdquo IEEE Transactions on Evolutionary Computation vol7 no 3 pp 289ndash304 2003
[21] D Davendra I Zelinka and R Senkerik ldquoChaos driven evo-lutionary algorithms for the task of PID controlrdquo ComputersandMathematics with Applications vol 60 no 4 pp 1088ndash11042010
[22] K V Price R M Storn and J A Lampinen DifferentialEvolutionmdasha Practical Approach to Global Optimization Natu-ral Computing Series Springer Berlin Germany 2005
[23] I Zelinka ldquoSOMAmdashself-organizing migrating algorithmrdquo inNew Optimization Techniques in Engineering vol 141 of Studiesin Fuzziness and Soft Computing pp 167ndash217 Springer BerlinGermany 2004
[24] L D S Coelho and V C Mariani ldquoA novel chaotic particleswarm optimization approach using Henon map and implicitfiltering local search for economic load dispatchrdquo Chaos Soli-tons amp Fractals vol 39 no 2 pp 510ndash518 2009
[25] R Senkerik D Davendra I Zelinka M Pluhacek and ZOplatkova ldquoAninvestigation on the chaos driven differentialevolution an initial studyrdquo in Proceedings of the 5th Inter-national Conference on Bioinspired Optimization Methods andTheir Applications (BIOMA rsquo12) pp 185ndash194 2012
[26] D Davendra I Zelinka R Senkerik and M Bialic-DavendraldquoChaos driven evolutionary algorithm for the traveling sales-man problemrdquo in Traveling Salesman Problem Theory andApplications D Davendra Ed InTech 2010
[27] DDavendraM Bialic-Davendra andR Senkerik ldquoSchedulingthe lot-streaming flowshop scheduling problemwith setup timewith the chaos-induced enhanced differential evolutionrdquo inProceedings of the IEEE Symposium on Differential Evolution(SDE rsquo13) pp 119ndash126 Singapore April 2013
[28] M Pluhacek R Senkerik D Davendra Z KominkovaOplatkova and I Zelinka ldquoOn the behavior and performanceof chaos driven PSO algorithm with inertia weightrdquo Computersand Mathematics with Applications vol 66 no 2 pp 122ndash1342013
[29] M Pluhacek R Senkerik I Zelinka and D Davendra ldquoChaosPSO algorithm driven alternately by two different chaoticmapsmdashan initial studyrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo13) pp 2444ndash2449 June 2013
[30] M Pluhacek R Senkerik and I Zelinka ldquoMultiple choicestrategy based PSO algorithm with chaotic decision makingmdashapreliminary studyrdquo in International Joint Conference SOCOrsquo13-CISISrsquo13-ICEUTErsquo13 A Herrero B Baruque F Klett et al Edsvol 239 of Advances in Intelligent Systems and Computing pp21ndash30 2014
[31] L D S Coelho and V C Mariani ldquoFirefly algorithm approachbased on chaotic Tinkerbell map applied to multivariable PIDcontroller tuningrdquo Computers and Mathematics with Applica-tions vol 64 no 8 pp 2371ndash2382 2012
[32] D Davendra ldquoEvolutionary algorithms and the edge of chaosrdquoin Evolutionary Algorithms and Chaotic Systems I Zelinka SCelikovsky H Richter and G Chen Eds vol 267 pp 145ndash161Springer Berlin Germany 2010
[33] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoEvolutionary control of chaotic Lozimap by means of chaos driven differential evolutionrdquo in AETA2013 Recent Advances in Electrical Engineering and RelatedSciences I Zelinka V H Duy and J Cha Eds vol 282 ofLecture Notes in Electrical Engineering pp 371ndash380 SpringerBerlin Germany 2014
[34] R Senkerik I Zelinka M Pluhacek and Z KominkovaOplatkova ldquoEvolutionary control of chaotic burgers map bymeans of chaos enhanced differential evolutionrdquo InternationalJournal of Mathematics and Computers in Simulation vol 8 pp39ndash45 2014
[35] R Senkerik M Pluhacek I Zelinka D Davendra ZOplatkova and R Jasek ldquoChaos driven differential evolutionin the task of evolutionary control of delayed logistic chaoticsystemrdquo in Proceedings of the 7th Global Conference on PowerControl and Optimization (PCO rsquo13) 2013
[36] M F Tasgetiren P N Suganthan and Q K Pan ldquoAn ensembleof discrete differential evolution algorithms for solving thegeneralized traveling salesman problemrdquo Applied Mathematicsand Computation vol 215 no 9 pp 3356ndash3368 2010
[37] G C Onwubolu and D Davendra Eds Differential EvolutionA handbook for Permutation-based Combinatorial Optimiza-tion vol 175 of Studies in Computational Intelligence SpringerBerlin Germany 2009
[38] L Wang H Qu T Chen and F P Yan ldquoAn effective hybridself-adapting differential evolution algorithm for the jointreplenishment and location-inventory problem in a three-levelsupply chainrdquoThe Scientific World Journal vol 2013 Article ID270249 11 pages 2013
[39] S Das A Abraham U K Chakraborty and A Konar ldquoDiffer-ential evolution using a neighborhood-based mutation opera-torrdquo IEEETransactions on EvolutionaryComputation vol 13 no3 pp 526ndash553 2009
[40] T J Choi CW Ahn and J An ldquoAn adaptive cauchy differentialevolution algorithm for global numerical optimizationrdquo TheScientific World Journal vol 2013 Article ID 969734 12 pages2013
[41] A K Qin V L Huang and P N Suganthan ldquoDifferential evo-lution algorithm with strategy adaptation for global numericaloptimizationrdquo IEEE Transactions on Evolutionary Computationvol 13 no 2 pp 398ndash417 2009
[42] J Zhang and A C Sanderson ldquoJADE self-adaptive differentialevolution with fast and reliable convergence performancerdquo inProceeding of the 2007 IEEE Congress on Evolutionary Compu-tation (CEC rsquo07) pp 2251ndash2258 Singapore September 2007
[43] J Zhang and A C Sanderson ldquoSelf-adaptive multi-objectivedifferential evolution with direction information provided byarchived inferior solutionsrdquo in Proceedings of the IEEE Congresson Evolutionary Computation (CEC rsquo08) pp 2801ndash2810 HongKong China June 2008
[44] R Senkerik D Davendra I Zelinka and Z Oplatkova ldquoChaosdriven differential evolution in the task of chaos control opti-mizationrdquo in Proceedings of the IEEE Congress on EvolutionaryComputation (CEC rsquo10) July 2010
[45] R Storn and K Price ldquoDifferential evolutionmdasha simple andefficient heuristic for global optimization over continuous
12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

12 The Scientific World Journal
spacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[46] K V Price ldquoAn introduction to differential evolutionrdquo in NewIdeas in Optimization D Corne M Dorigo and F Glover EdsMcGraw-Hill 1999
[47] J C Sprott Chaos and Time-Series Analysis Oxford UniversityPress New York NY USA 2003
[48] M A Aziz-Alaoui C Robert and C Grebogi ldquoDynamics of aHenon-Lozi-type maprdquo Chaos Solitons amp Fractals vol 12 no12 pp 2323ndash2341 2001
Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014

Submit your manuscripts athttpwwwhindawicom
Computer Games Technology
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Distributed Sensor Networks
International Journal of
Advances in
FuzzySystems
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014
International Journal of
ReconfigurableComputing
Hindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
Artificial Intelligence
HindawithinspPublishingthinspCorporationhttpwwwhindawicom Volumethinsp2014
Advances inSoftware EngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation
httpwwwhindawicom Volume 2014
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
ArtificialNeural Systems
Advances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational Intelligence and Neuroscience
Industrial EngineeringJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Human-ComputerInteraction
Advances in
Computer EngineeringAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014