evolutionary algorithms 3.differential evolution
TRANSCRIPT
Evolutionary Algorithms
3.Differential Evolution
Outline
Preface
Basic Differential Evolution
Difference Vectors
Mutation
Crossover
Selection
General Differential Evolution Algorithm
Control Parameters
Geometrical Illustration
DE/x/y/z 2
Agenda Variations to Basic Differential Evolution
Hybrid Differential Evolution Strategies
Population-Based Differential Evolution
Self-Adaptive Differential Evolution
Differential Evolution for Discrete-Valued Problems
Constraint Handling Approaches
Comparison with other algorithms
Applications 3
Preface Price and Storn in 1995 Chebychev Polynomial fitting
Problem
3rd place at the First International Contest on evolutionary
Computation (1stICEO) 1996, the best genetic type of
algorithm for solving the real-valued test function suite.
stochastic, population-based search strategy
Main characteristics Guide search with distance and direction information from the current
population
original DE strategies for continuous-valued landscapes 4
Basic Differential Evolution
mutation is applied first to generate a trial vector, which is then used within the crossover operator to produce one offspring,
mutation step sizes are not sampled from a prior known probability distribution function.
mutation step sizes are influenced by differences between individuals of the current population 5
Difference Vectors
Position of individuals and fitness
Over time, as the search progresses, the distances between individuals become
smaller
The magnitude of the initial distances between individuals is influenced by the
size of the population
Distances between individuals are a very good indication of the diversity of
the current population
Use difference vector to determine the step size
total number of differential perturbations
nv is the number of differentials used
ns is the population size6
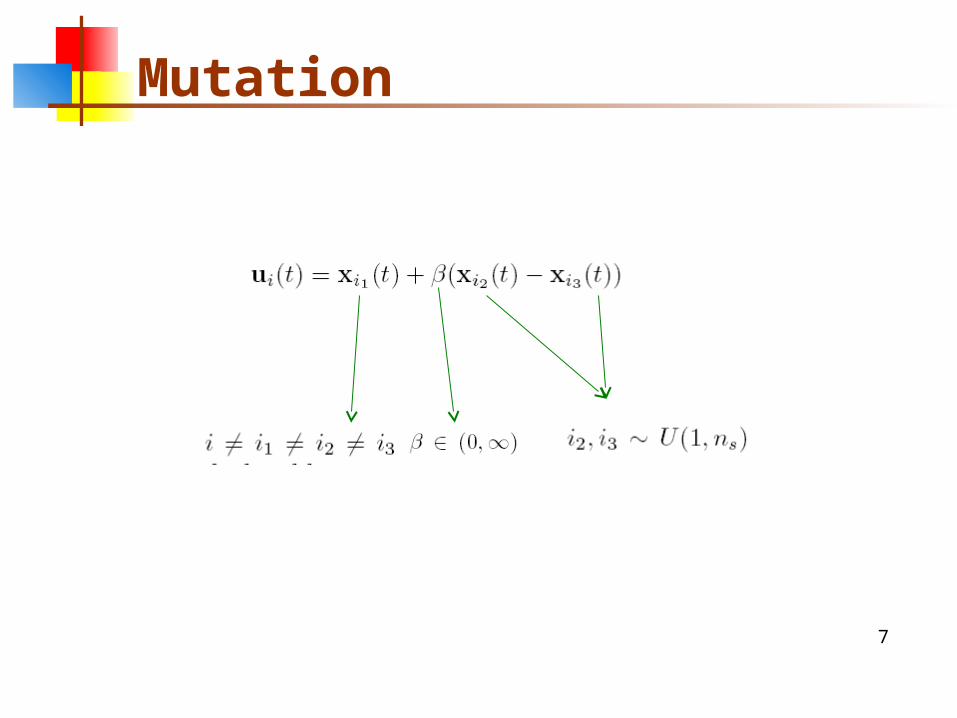
Mutation
7
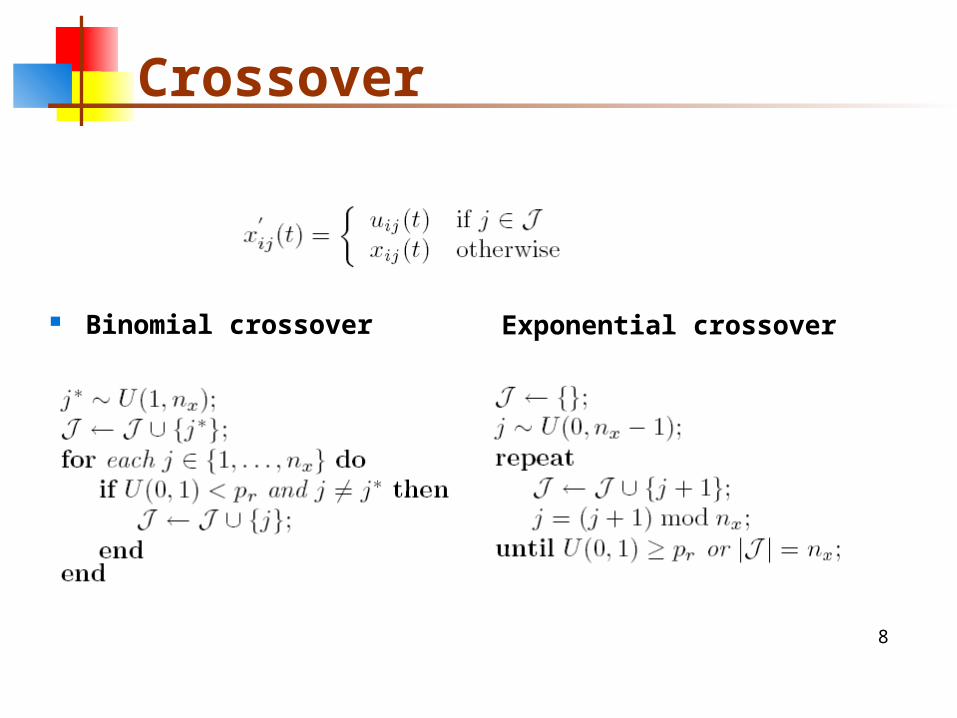
Crossover
Binomial crossover Exponential crossover
8
Selection
Random Selection To select the individuals from which difference vectors are
calculated. The target vector is either randomly selected or the best
individual is selected
Deterministic Selection To construct the population for the next generation, the
offspring replaces the parent if the fitness of the offspring is better than its parent; otherwise the parent survives to the next generation.
This ensures that the average fitness of the population does not deteriorate.
9
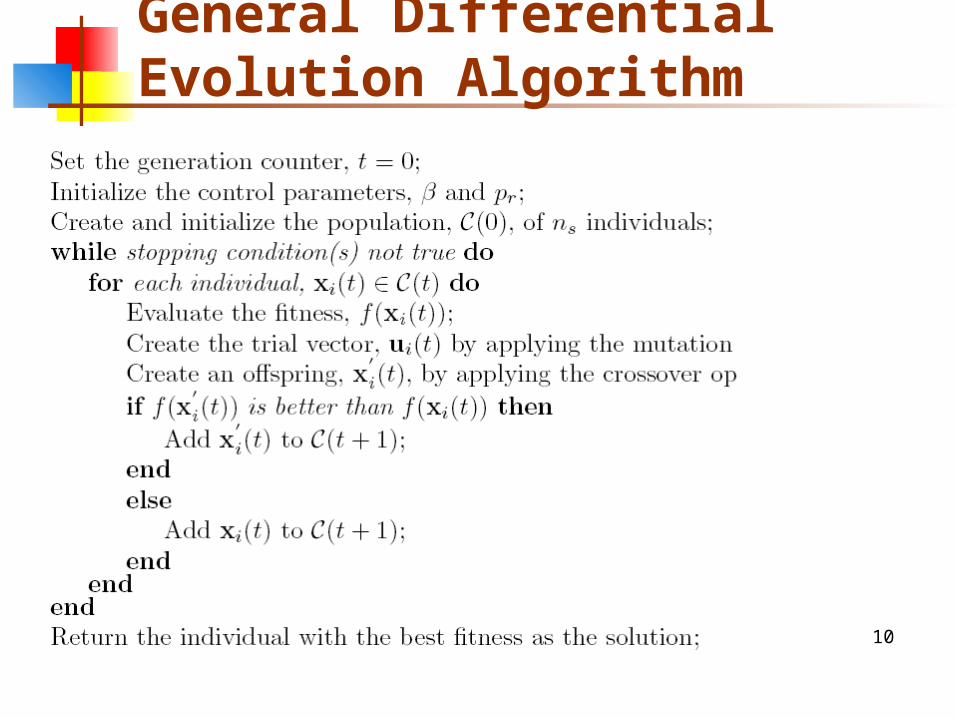
General Differential Evolution Algorithm
10
11
Control Parameters
population size,ns
scale factor, β
probability of recombination,Pr
12
population size
The size of the population has a direct influence on the exploration ability of DE algorithms.
The more individuals there are in the population, the more differential vectors are available, and the more directions can be explored
The computational complexity per generation increases with the size of the population.
Empirical studies provide the guideline that ns ≈ 10nx13
scale factor
The scaling factor, β (0,∞), ∈ controls the amplification of the differential variations, (xi2−xi3 ).
The smaller the value of β, the smaller the mutation step sizes
Smaller step sizes can be used to explore local areas. slower convergence
Larger values for β facilitate exploration, but may cause the algorithm to overshoot optima
As the population size increases, the scaling factor should decrease. 14
Recombination probability
This parameter controls the number of elements of the parent, xi(t), that will change.
The higher the probability of recombination, the more variation is introduced in the new population, thereby increasing diversity and increasing exploration.
Increasing pr often results in faster convergence, while decreasing pr increases search robustness
15
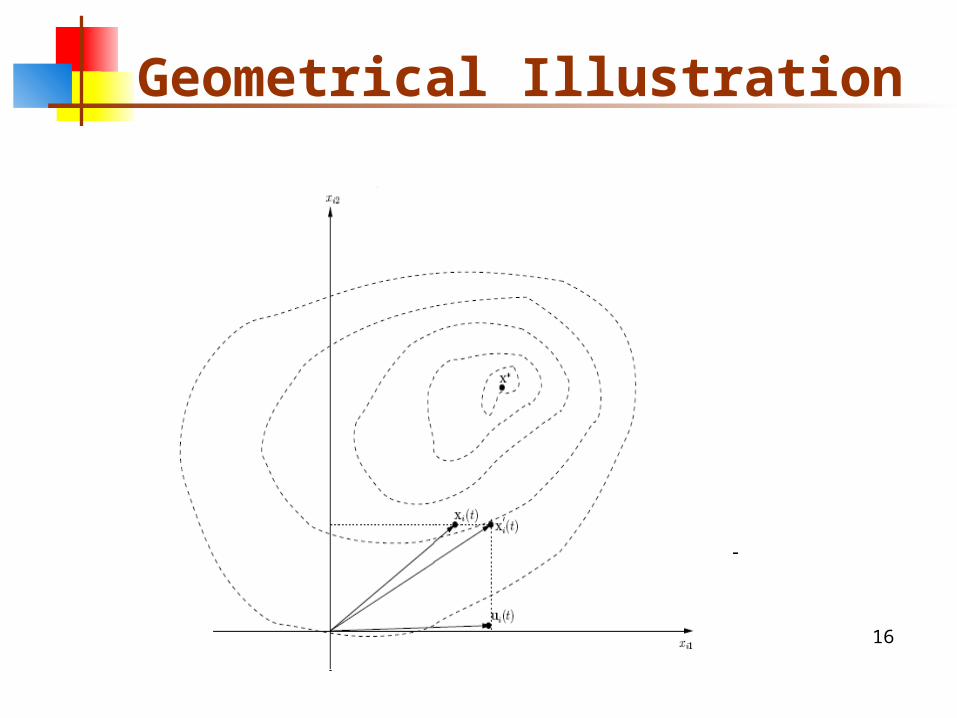
Geometrical Illustration
16
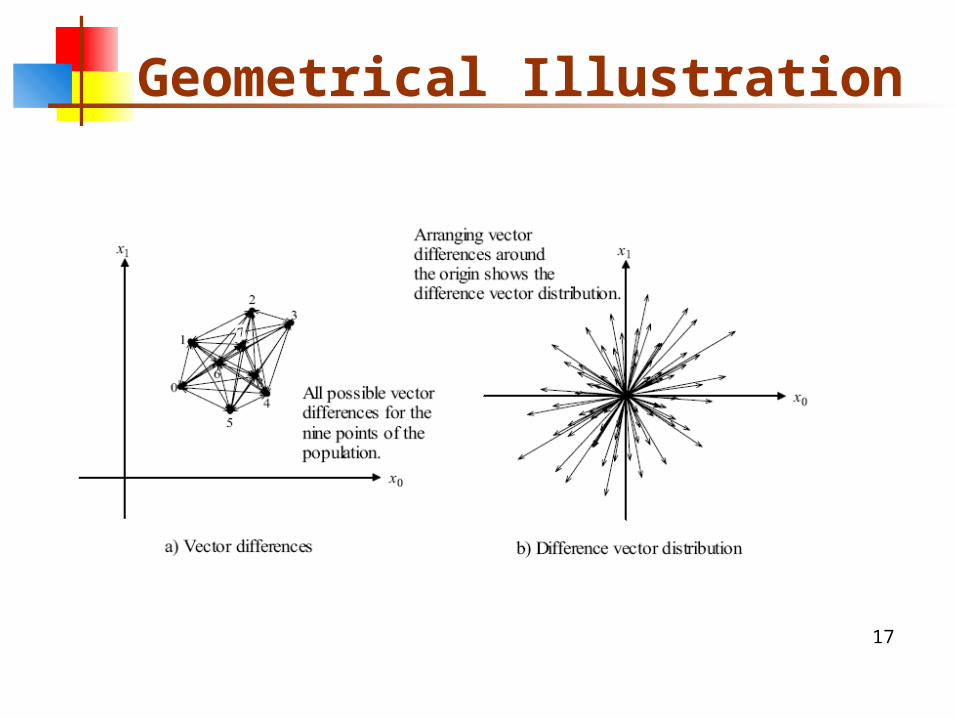
Geometrical Illustration
17
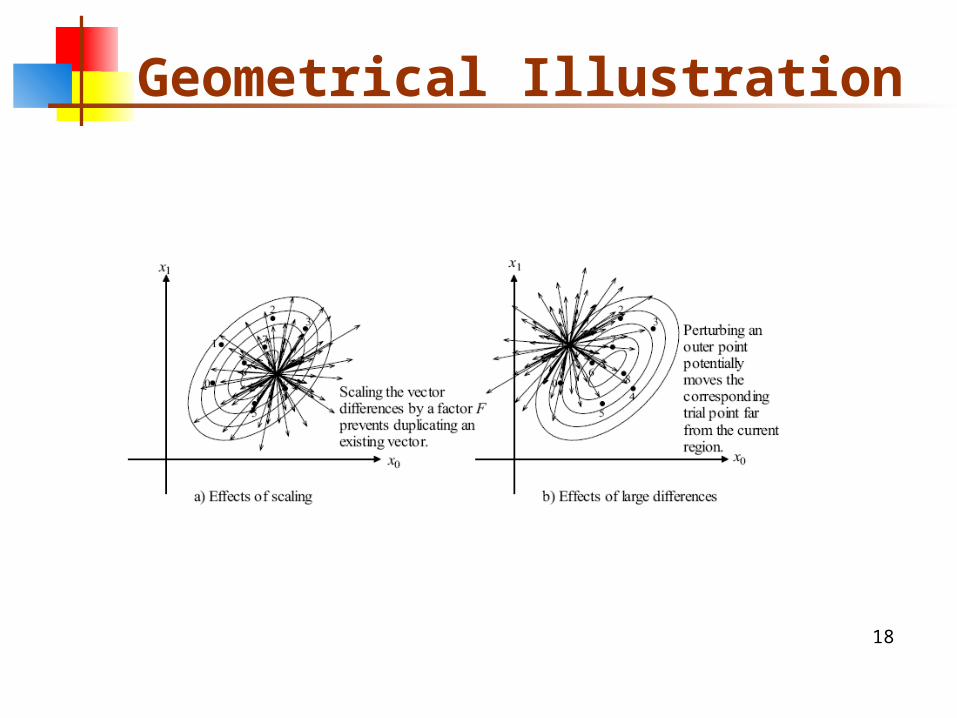
Geometrical Illustration
18
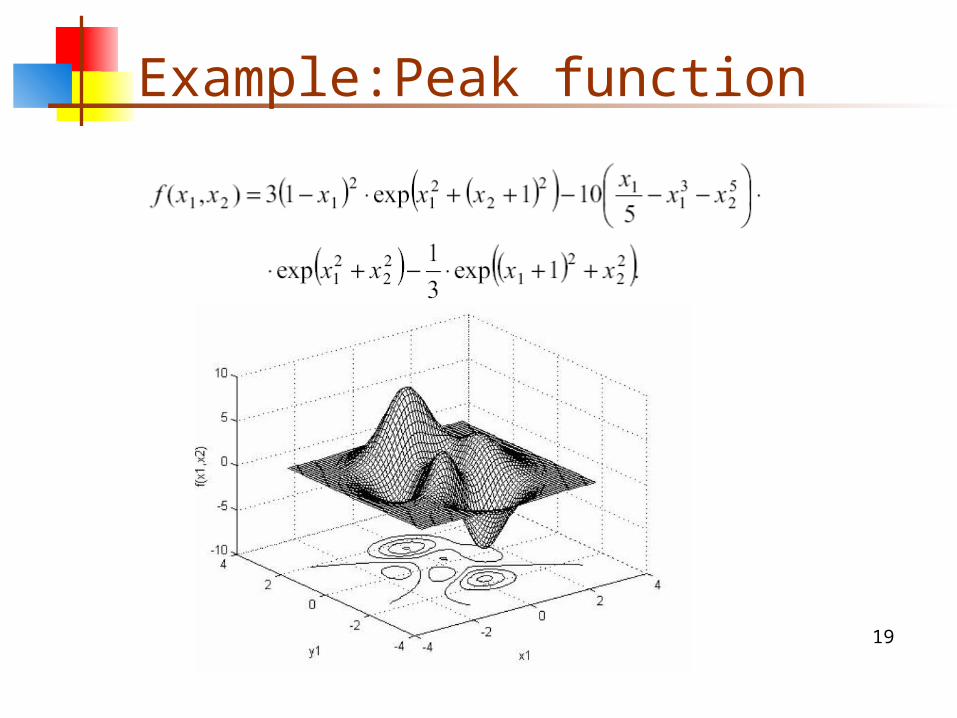
Example:Peak function
19

Geometrical Illustration
Generation 1: DE’s population and difference vector distributions
20
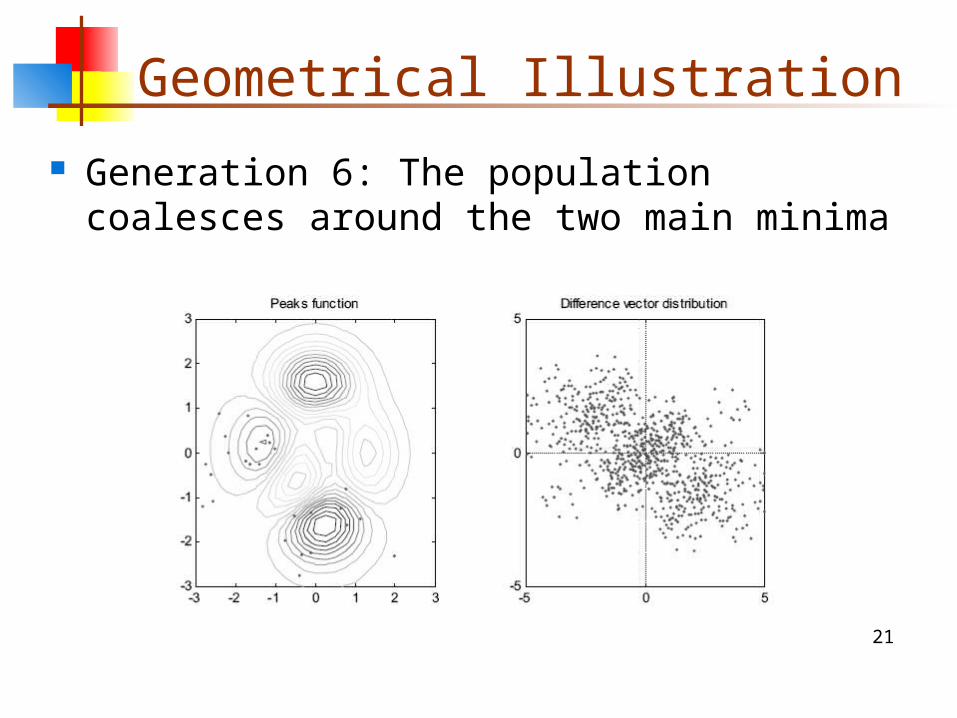
Geometrical Illustration
Generation 6: The population coalesces around the two main minima
21
Geometrical Illustration
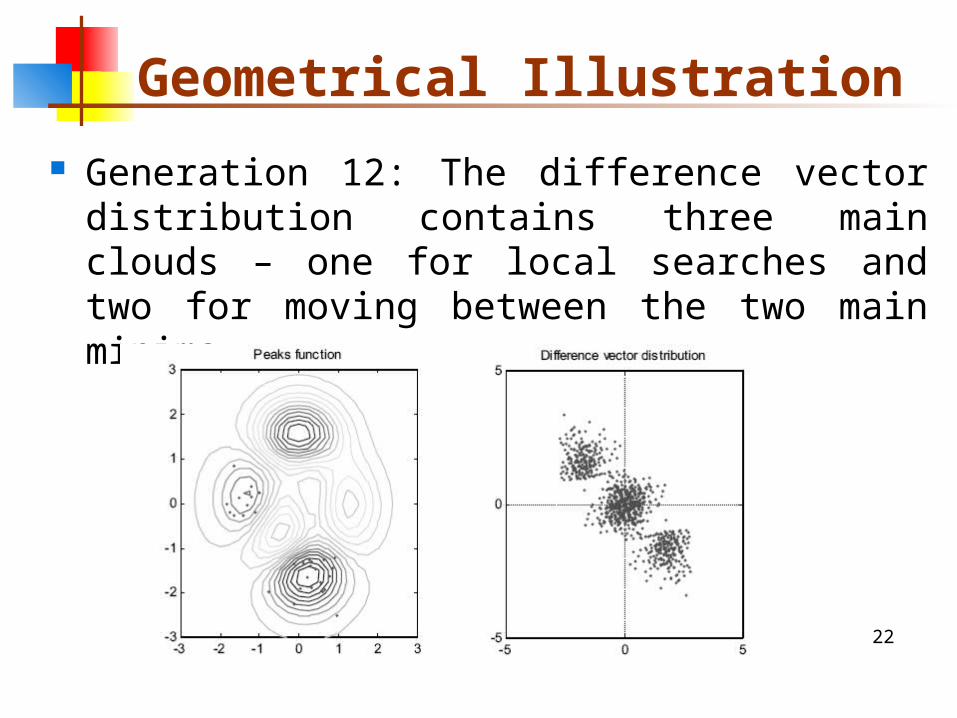
Generation 12: The difference vector distribution contains three main clouds – one for local searches and two for moving between the two main minima.
22
Geometrical Illustration
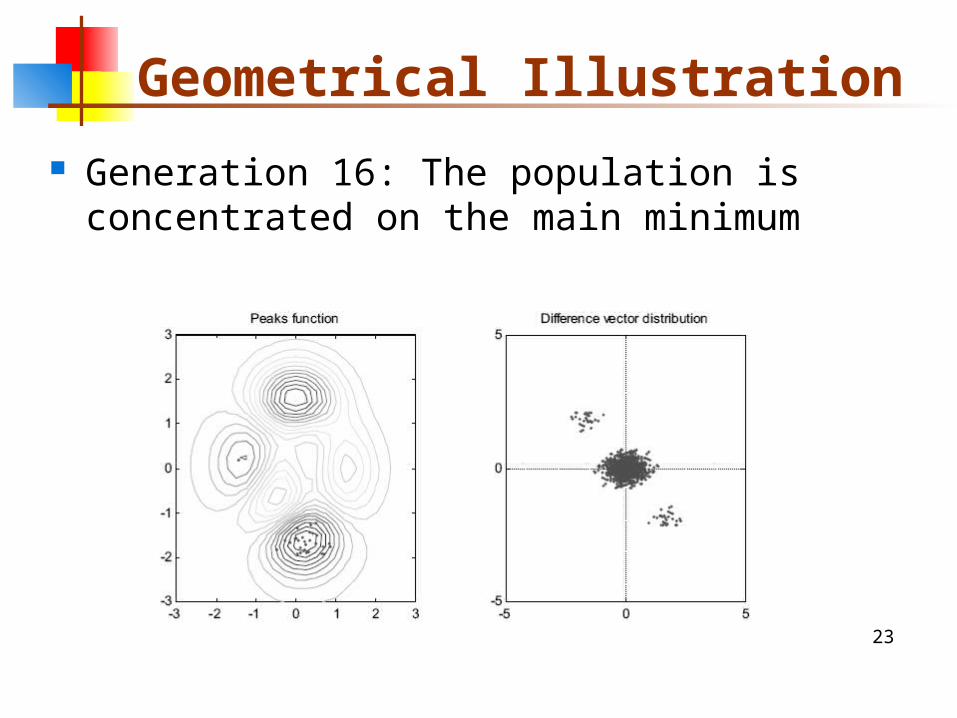
Generation 16: The population is concentrated on the main minimum
23
Geometrical Illustration
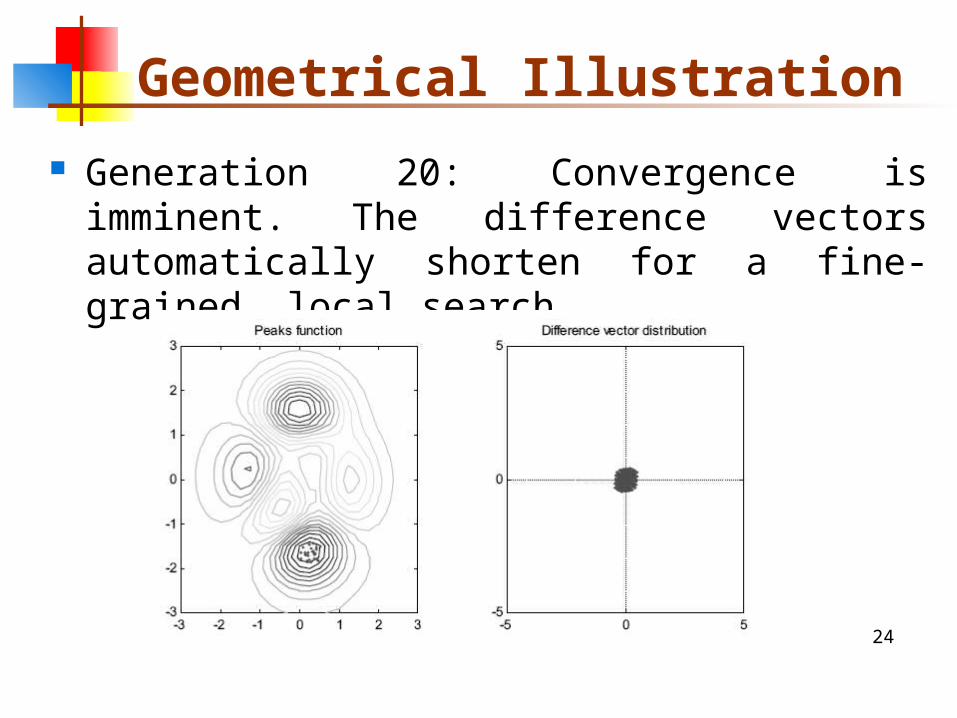
Generation 20: Convergence is imminent. The difference vectors automatically shorten for a fine-grained, local search.
24
Geometrical Illustration
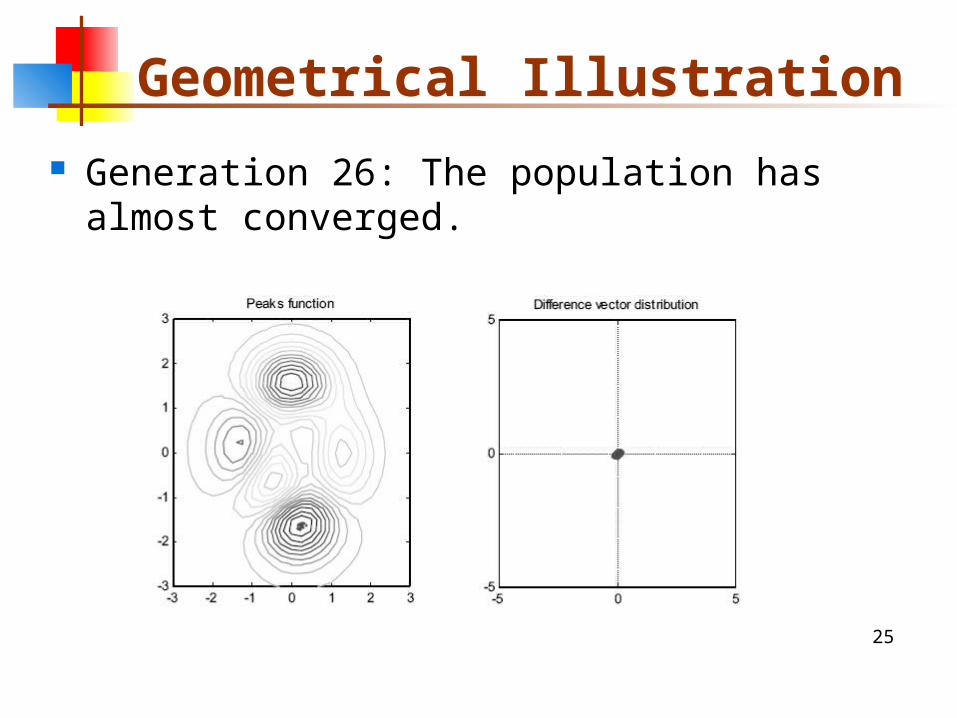
Generation 26: The population has almost converged.
25
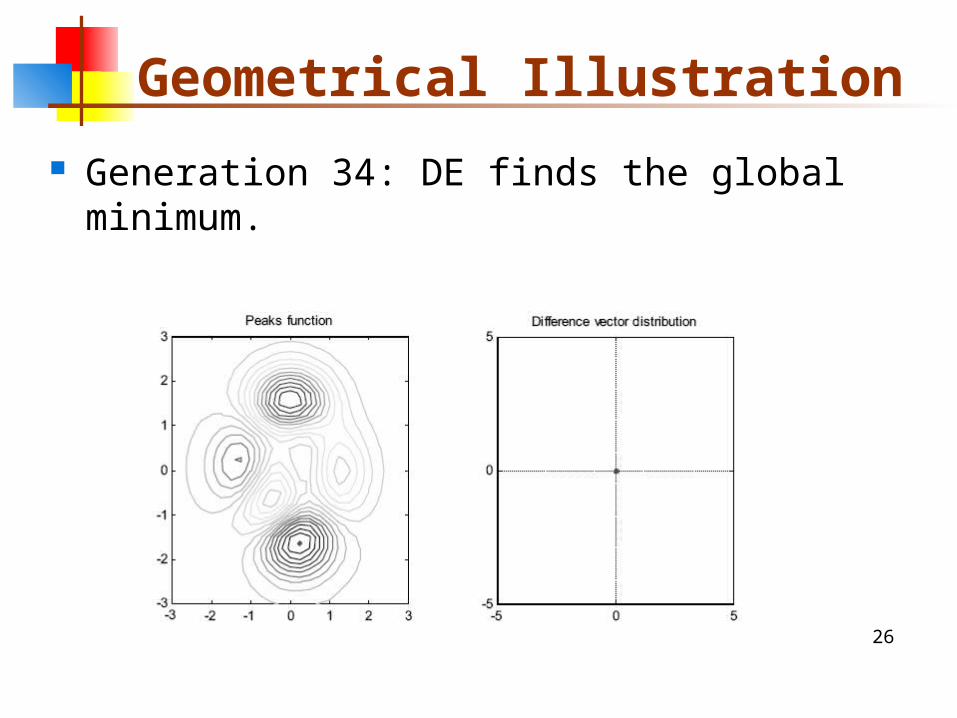
Geometrical Illustration
Generation 34: DE finds the global minimum.
26
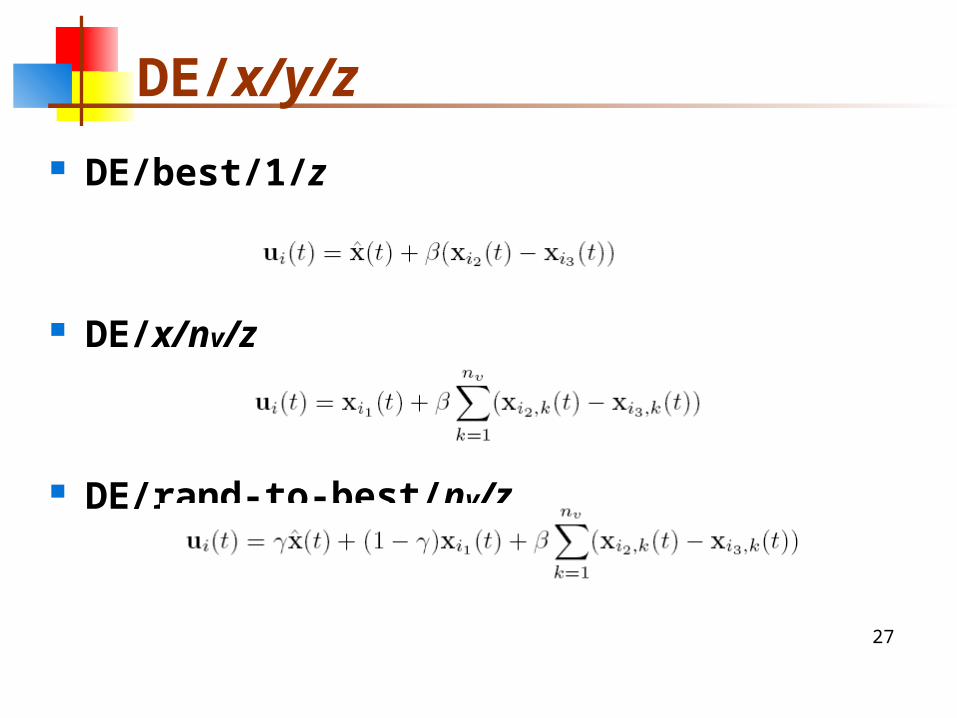
DE/x/y/z
DE/best/1/z
DE/x/nv/z
DE/rand-to-best/nv/z
27
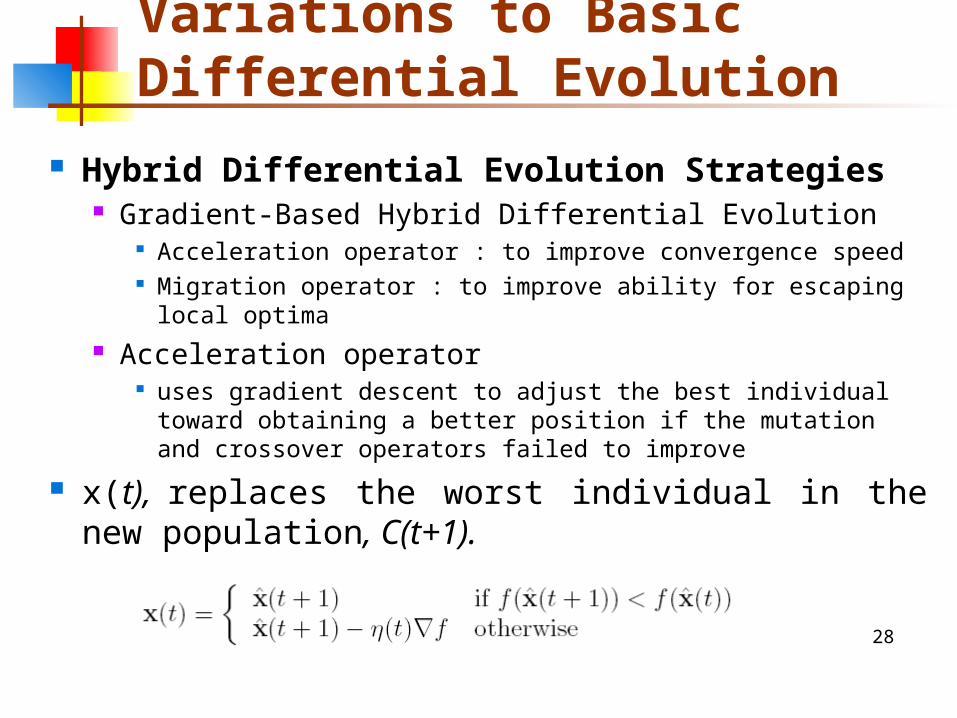
Variations to Basic Differential Evolution
Hybrid Differential Evolution Strategies Gradient-Based Hybrid Differential Evolution
Acceleration operator : to improve convergence speed Migration operator : to improve ability for escaping local optima
Acceleration operator uses gradient descent to adjust the best individual toward obtaining a
better position if the mutation and crossover operators failed to improve
x(t), replaces the worst individual in the new population, C(t+1).
28
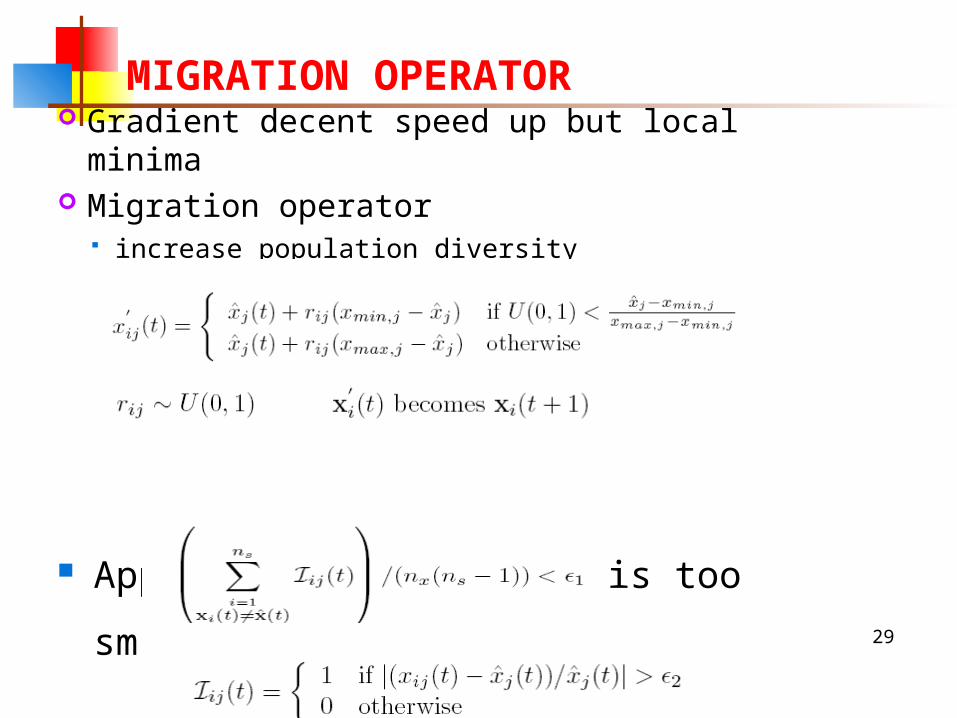
MIGRATION OPERATOR Gradient decent speed up but local minima Migration operator
increase population diversity Generate new individual from best individuals
Applied when diversity is too small i.e.:
29
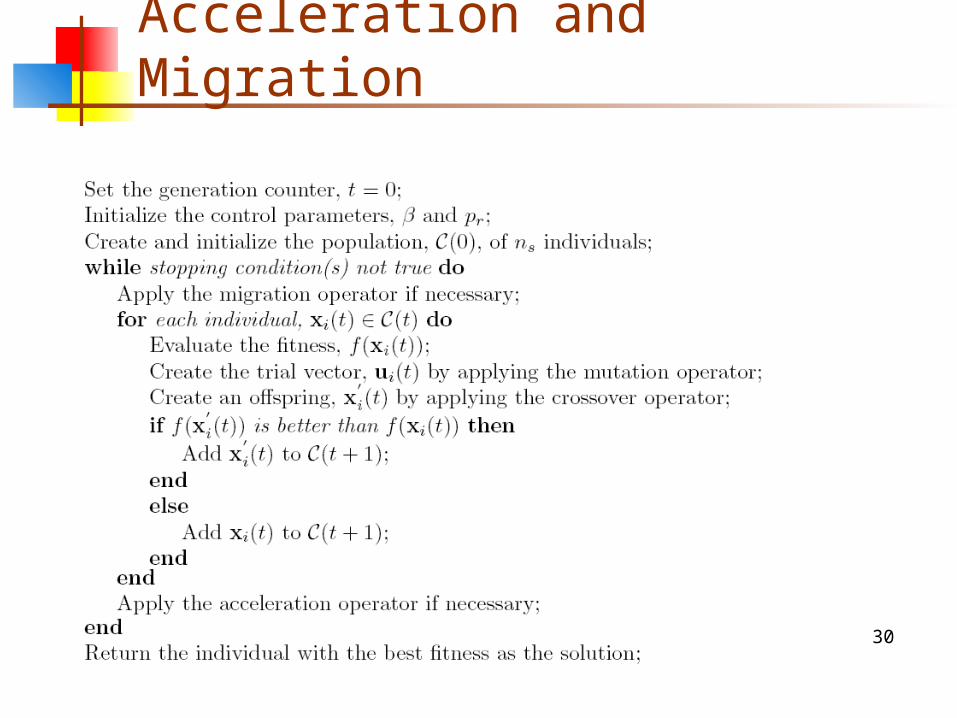
Hybrid Differential Evolution with Acceleration and Migration
30
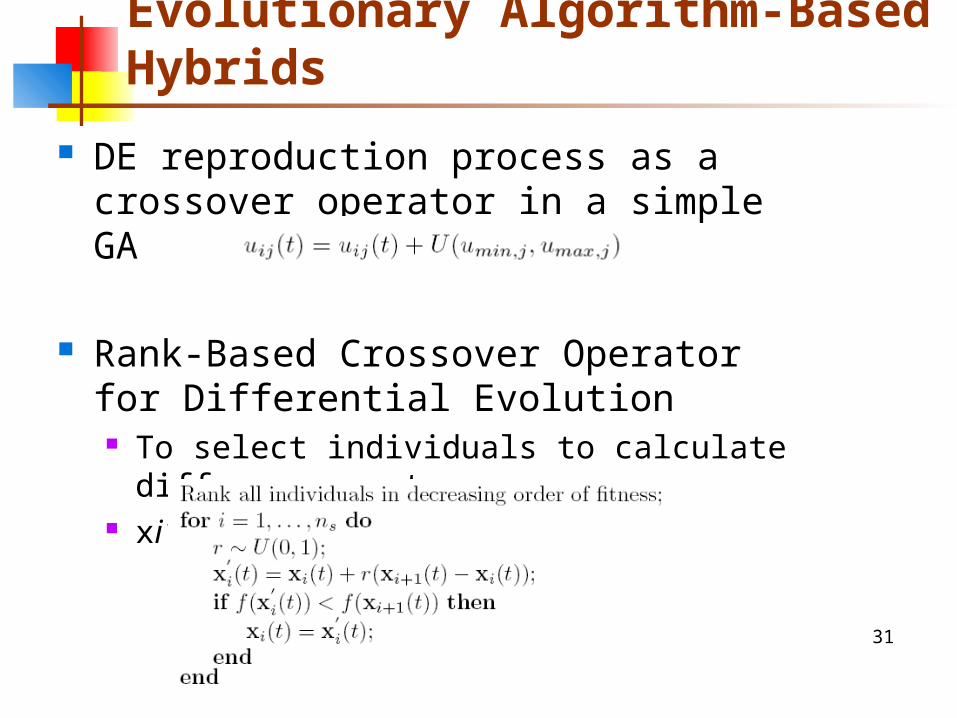
Evolutionary Algorithm-Based Hybrids
DE reproduction process as a crossover operator in a simple GA
Rank-Based Crossover Operator for Differential Evolution To select individuals to calculate difference vectors xi1 (t) precedes xi2 (t) if f(xi1(t)) > f(xi2(t)).
31
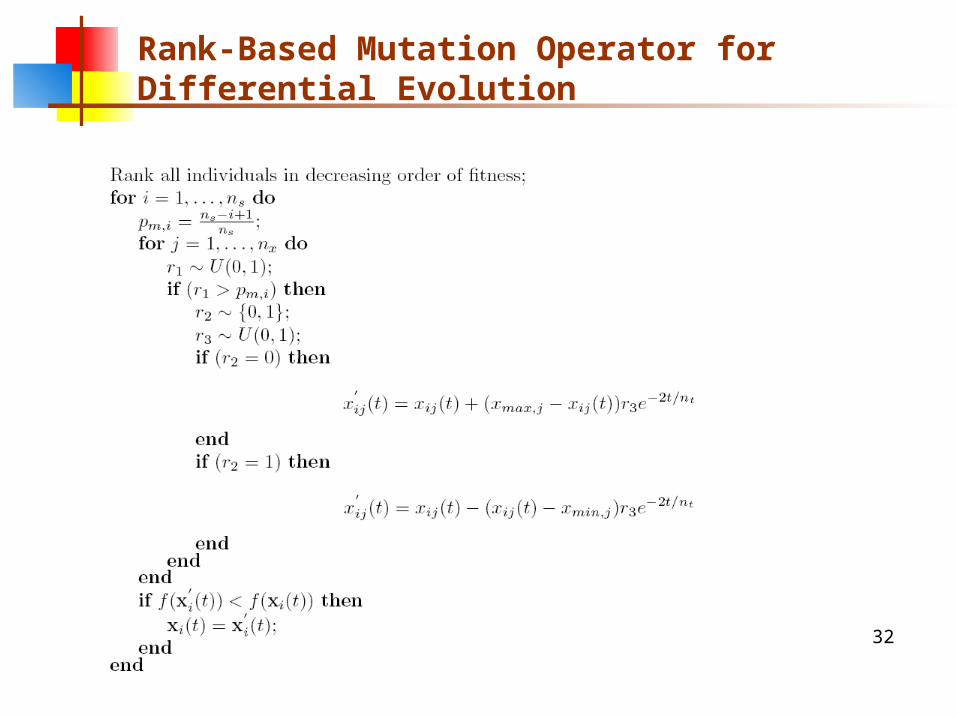
Rank-Based Mutation Operator for Differential Evolution
32
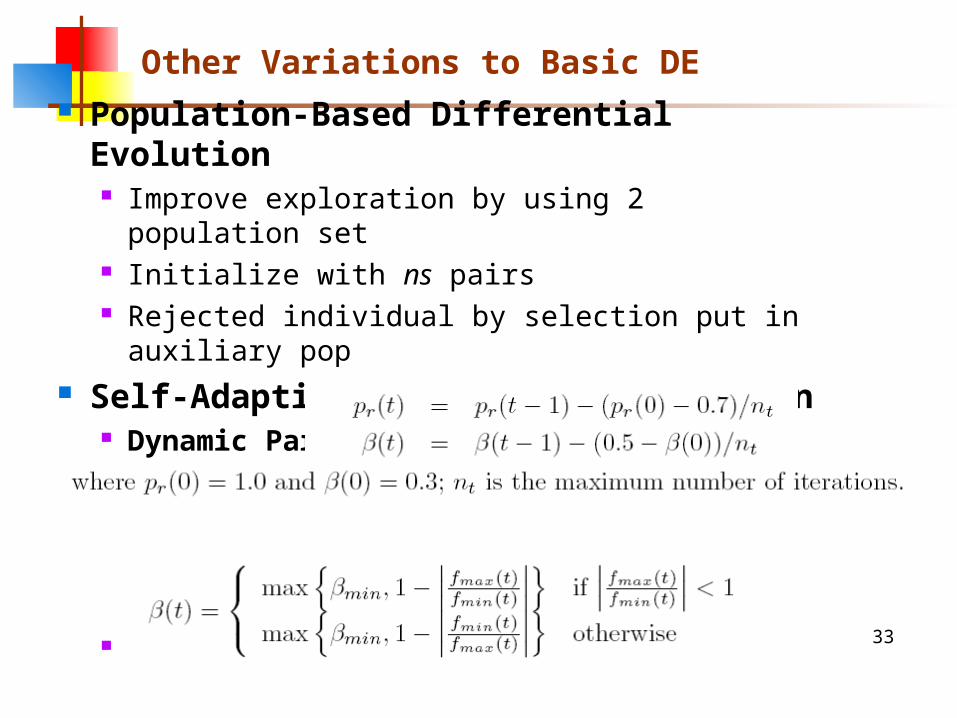
Other Variations to Basic DE
Population-Based Differential Evolution Improve exploration by using 2 population set Initialize with ns pairs Rejected individual by selection put in auxiliary pop
Self-Adaptive Differential Evolution Dynamic Parameters
Self-Adaptive Parameters
33
Differential Evolution for Discrete-Valued Problems
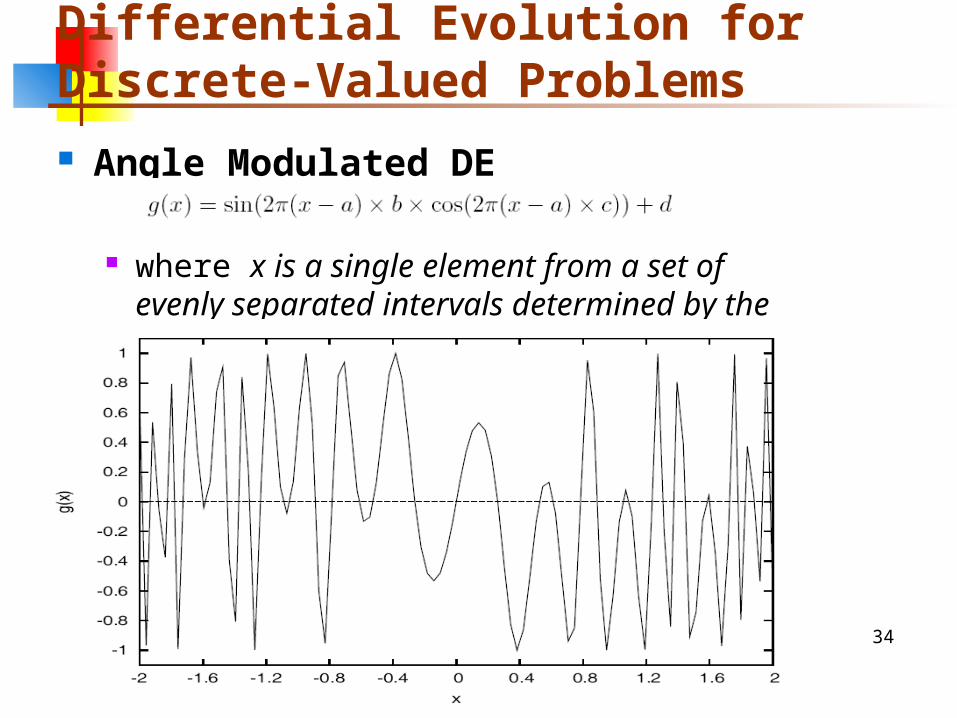
Angle Modulated DE
where x is a single element from a set of evenly separated intervals determined by the required number of bits that need to be generated
34
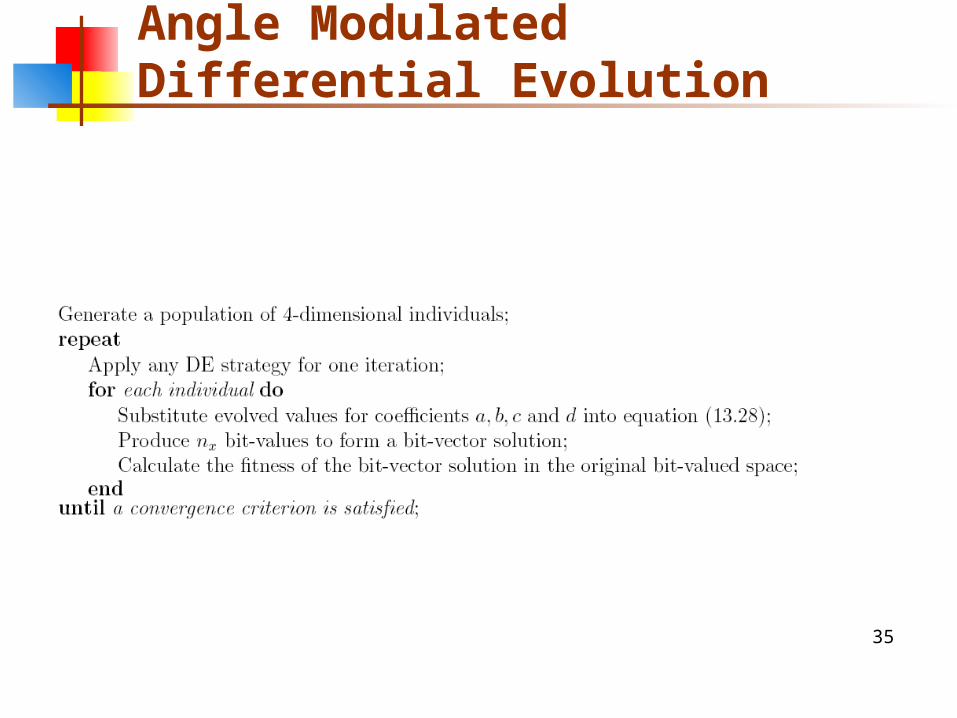
Angle Modulated Differential Evolution
35
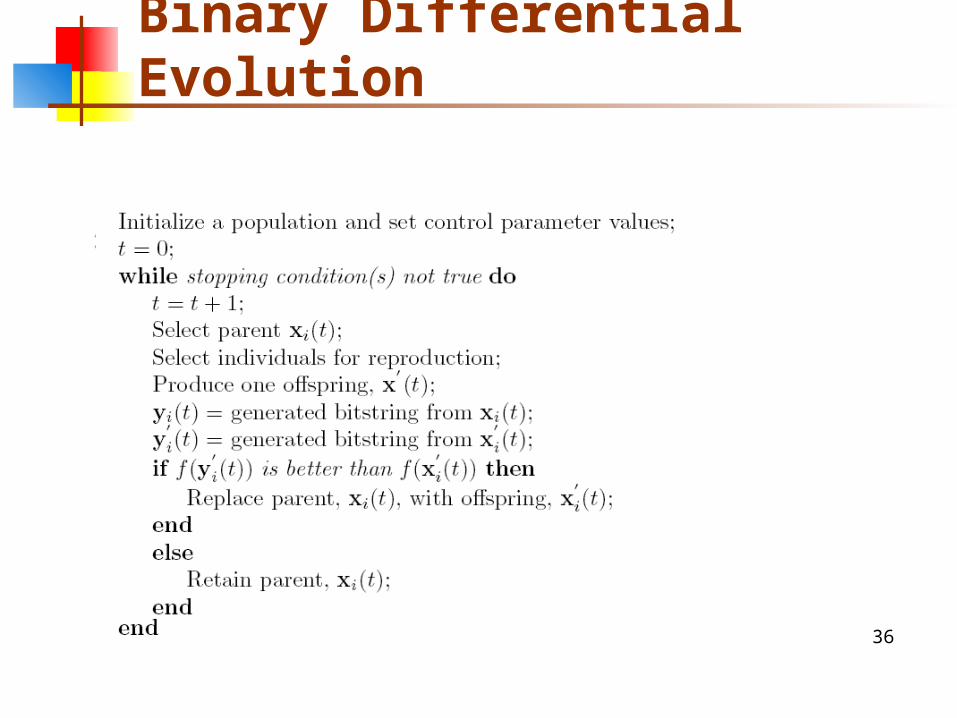
Binary Differential Evolution
36
Constraint Handling Approaches
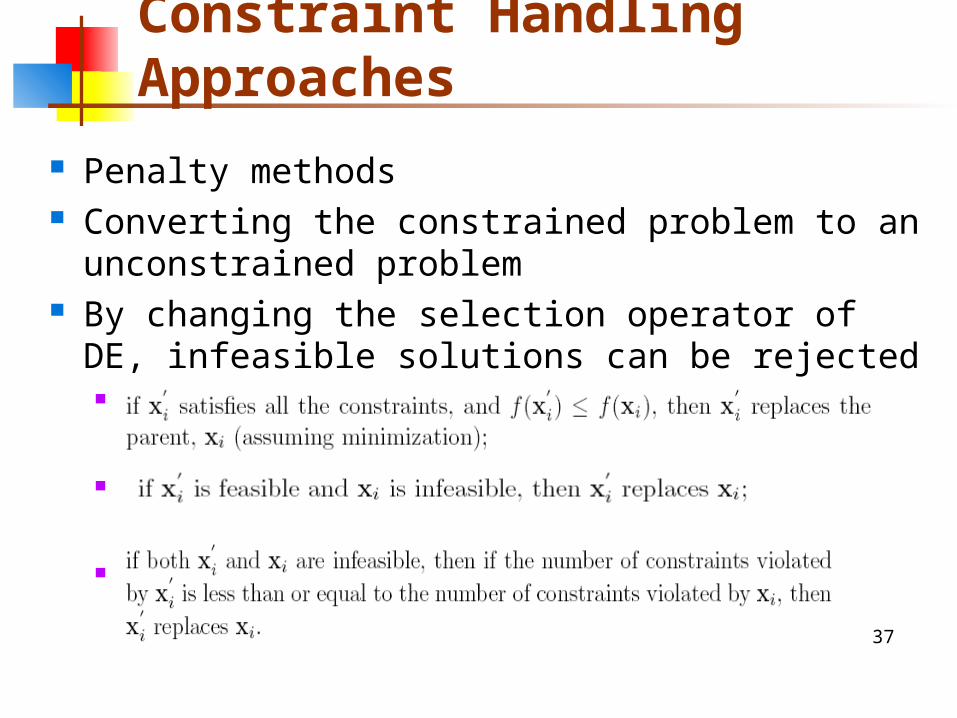
Penalty methods Converting the constrained problem to an unconstrained
problem By changing the selection operator of DE, infeasible
solutions can be rejected
37
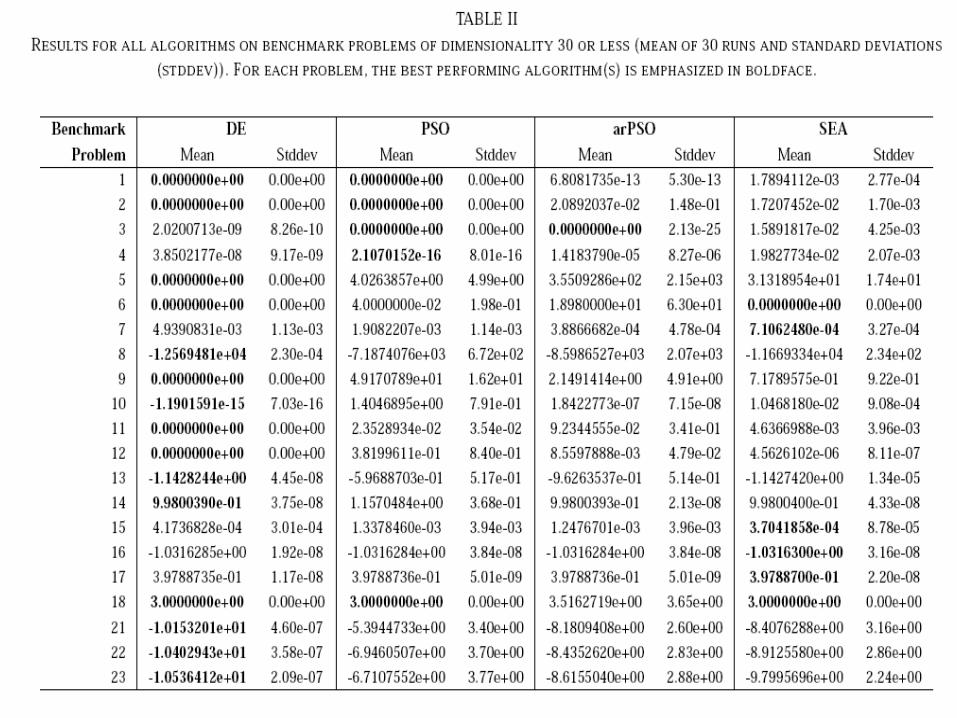
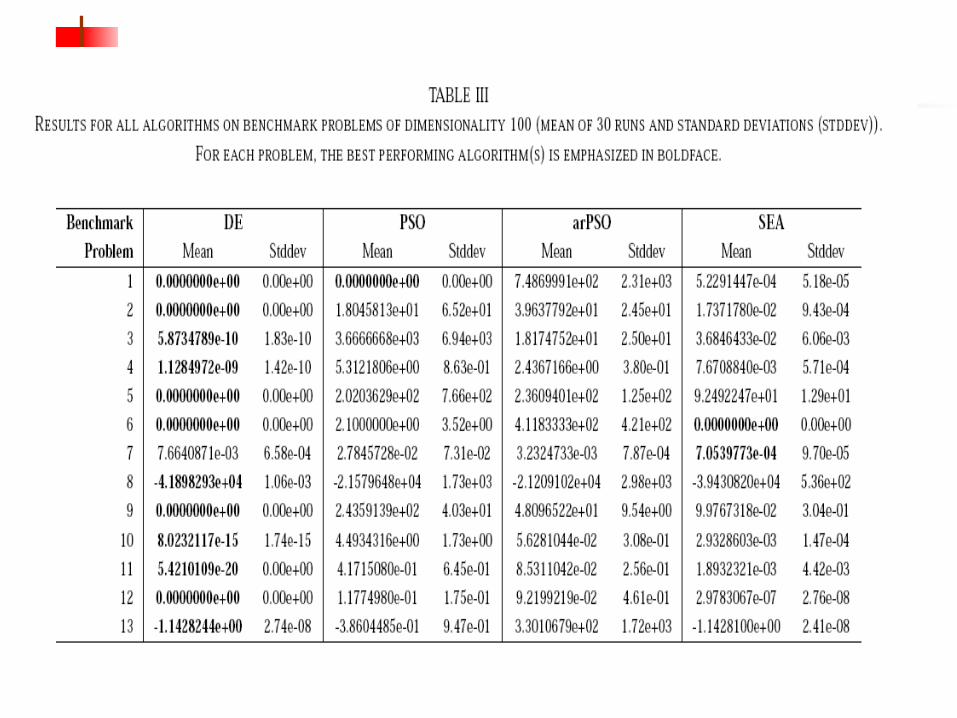
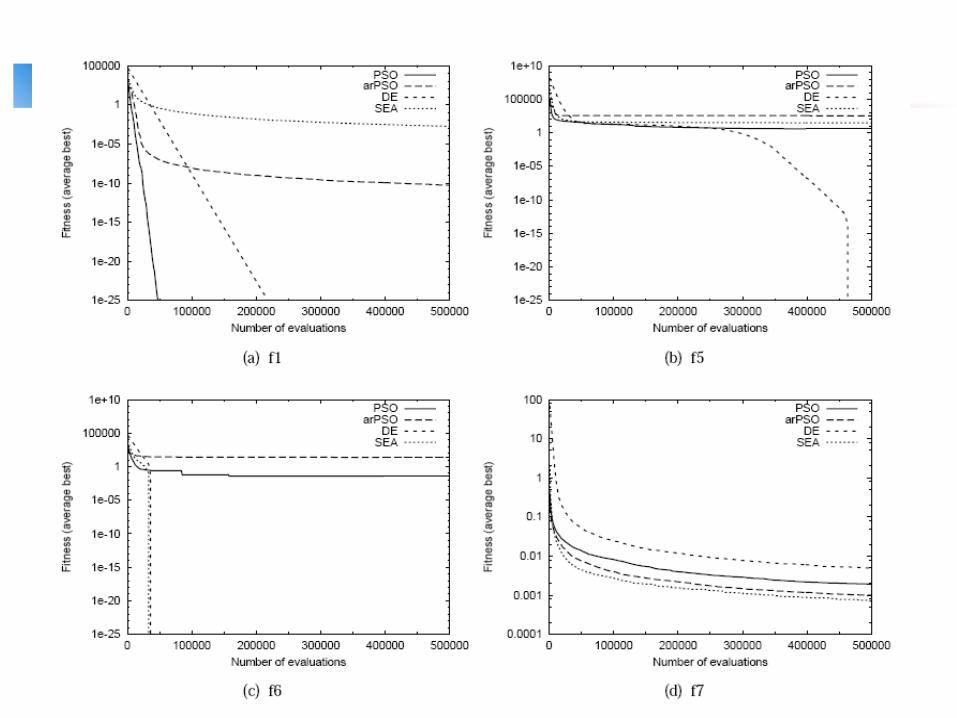
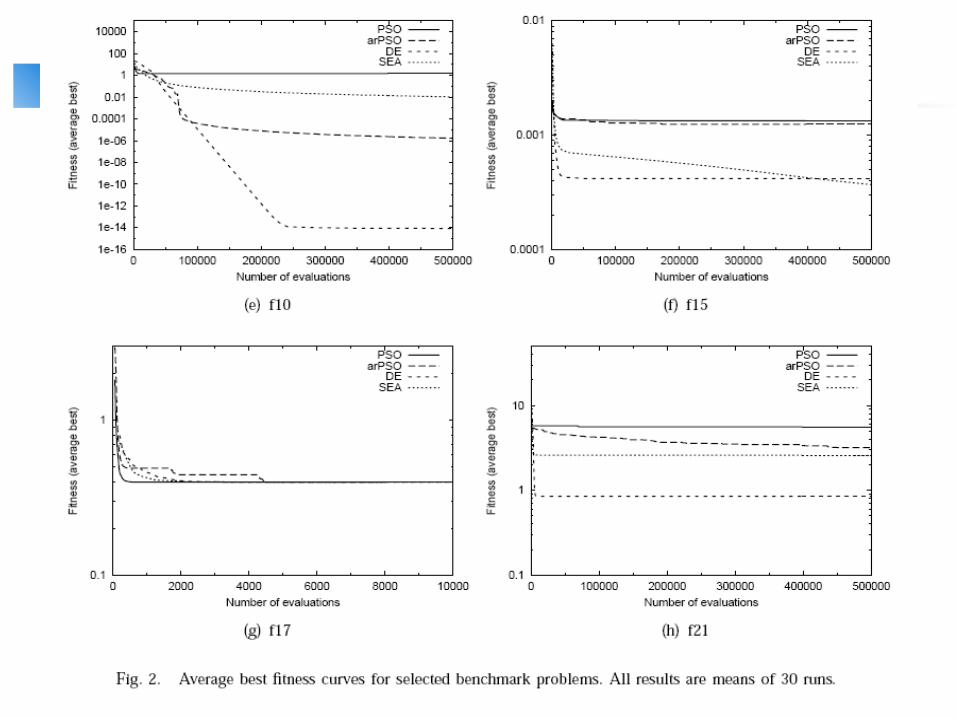
Comparison with GA and PSO
38
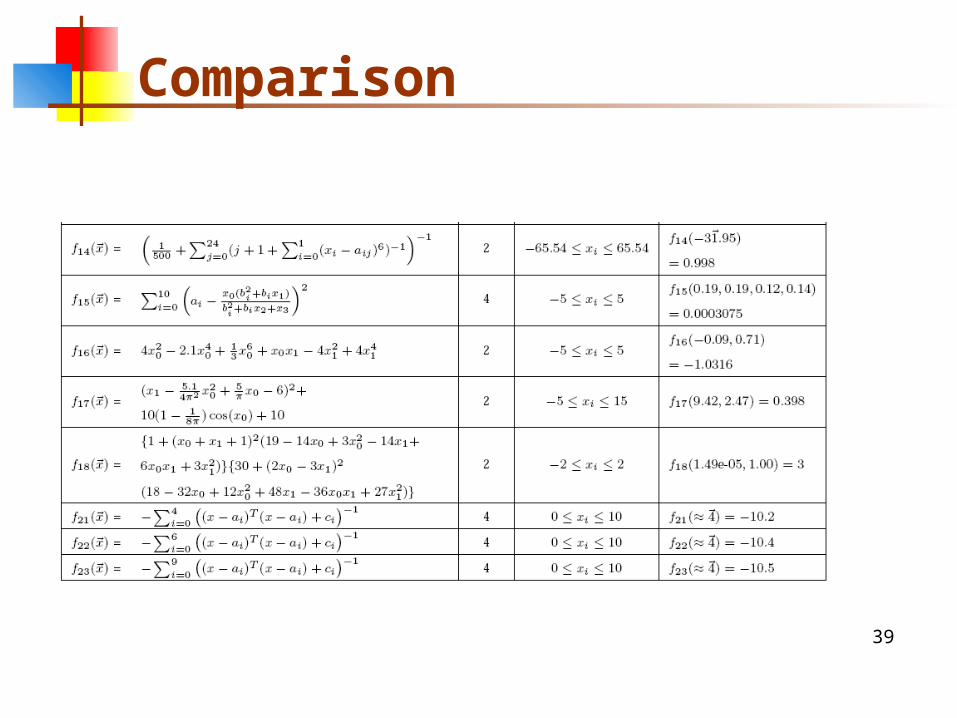
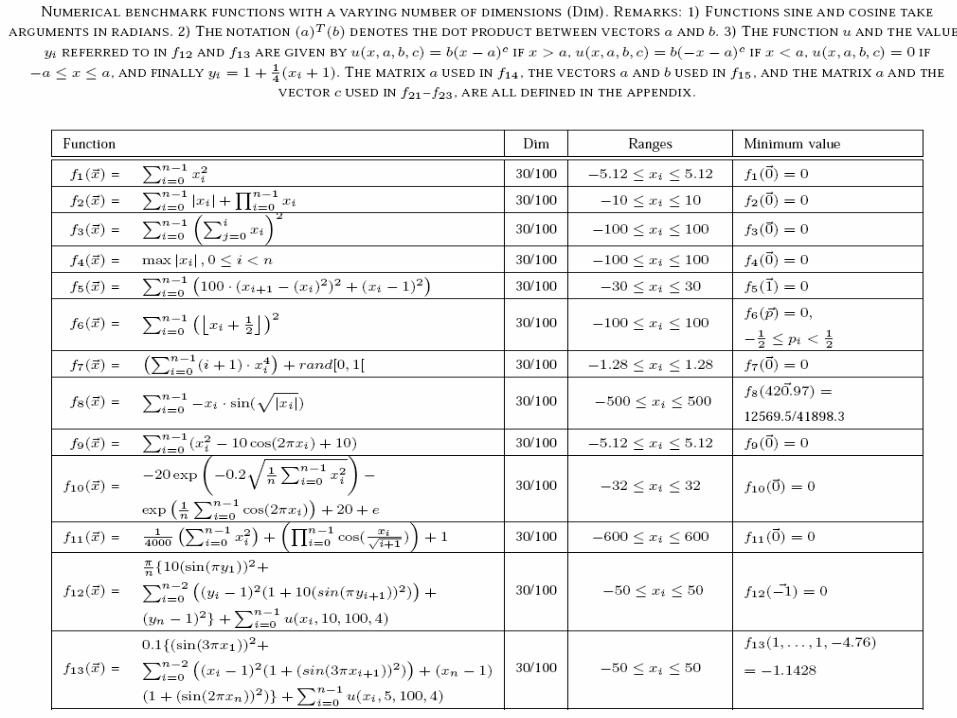
Comparison
39
40
41
42
43
Applications 1) General Optimization Framework "Mystic" by Mike McKerns, Caltech. 2) Multiprocessor synthesis. 3) Neural network learning. 4) Chrystallographic characterization. 5) Synthesis of modulators. 6) Heat transfer parameter estimation in a trickle bed reactor. 7) Scenario-Integrated Optimization of Dynamic Systems. 8) Optimal Design of Shell-and-Tube Heat Exchangers. 9) Optimization of an Alkylation Reaction. 10) Optimization of Thermal Cracker Operation. 11) Optimization of Non-Linear Chemical Processes. 12) Optimum planning of cropping patterns. 13) Optimization of Water Pumping System . 14) Optimal Design of Gas Transmission Network . 15) Differential Evolution for Multi-Objective Optimization 16) Physiochemistry of Carbon Materials. 17) Radio Network Design. 18) Reflectivity Curve Simulation.
44
Commercial soft 1) Built in optimizer in MATHEMATICA's
function Nminimize (since version 4.2). 2) MATLAB's GA toolbox contains a variant of
DE. 3) Digital Filter Design. 4) Diffraction grating design. 5) Electricity market simulation. 6) Auto2Fit. 7) LMS Virtual Lab Optimization. 8) Optimization of optical systems. 9) Finite Element Design.
45
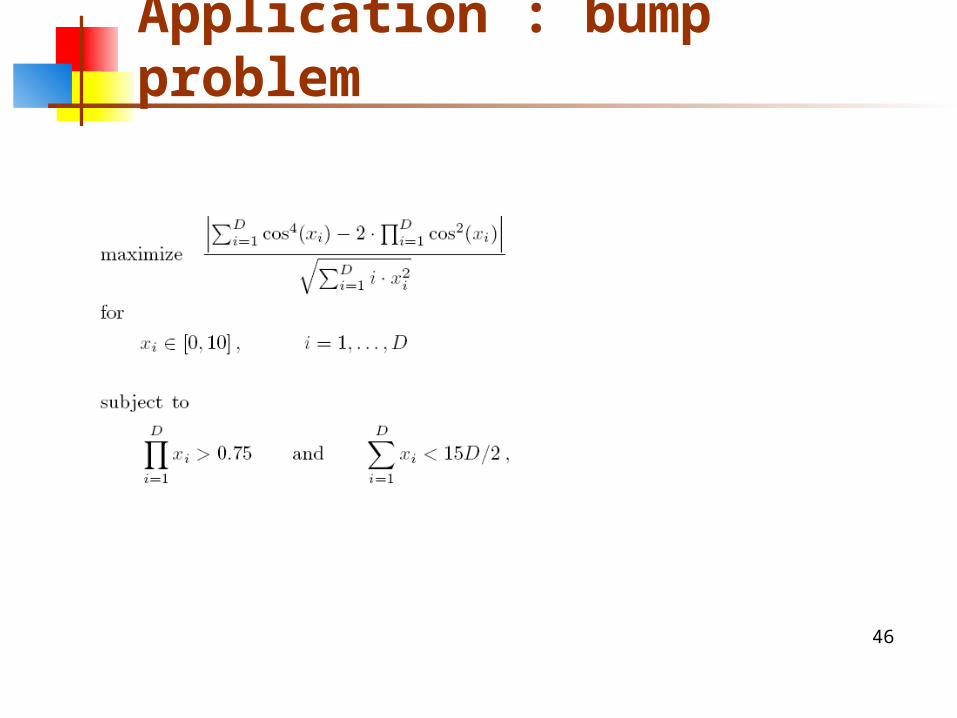
Application : bump problem
46
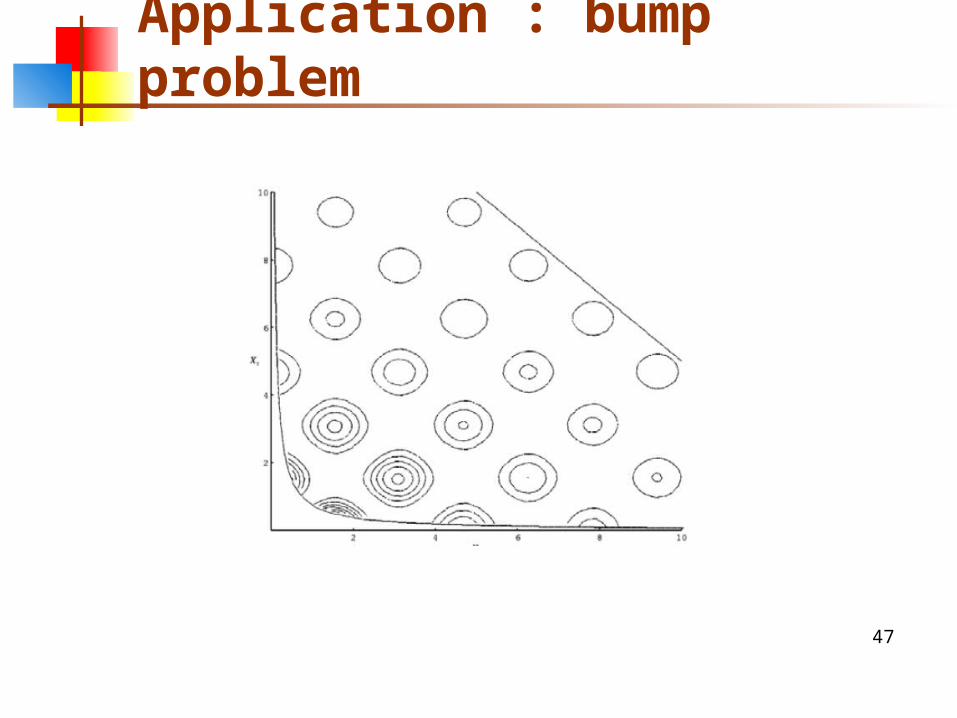
Application : bump problem
47
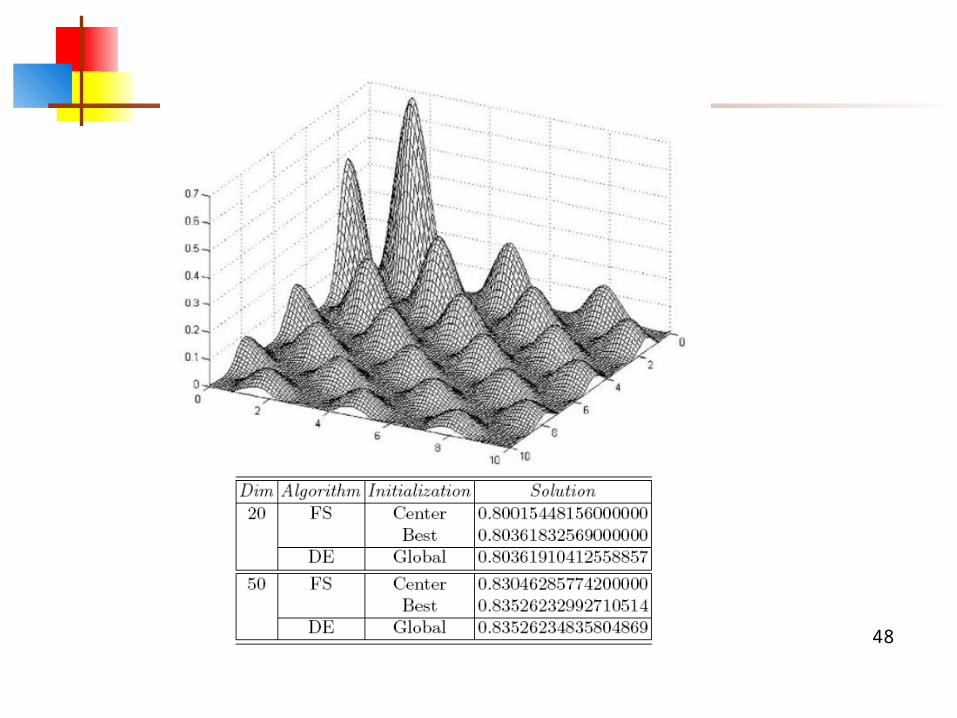
48
References
[1] http://www.icsi.berkeley.edu/~storn/code.html [2] Andries P. Engelbrecht ,(2007),Computational Intelligence: An
Introduction, 2nd Edition., ISBN: 978-0-470-03561-0. [3] Price, K.; Storn, R.M.; Lampinen, J.A. (2005). Differential
Evolution: A Practical Approach to Global Optimization. Springer. ISBN 978-3-540-20950-8. http://www.springer.com/computer/theoretical+computer+science/foundations+of+computations/book/978-3-540-20950-8.
[4] Feoktistov, V. (2006). Differential Evolution: In Search of Solutions. Springer. ISBN 978-0-387-36895-5. http://www.springer.com/mathematics/book/978-0-387-36895-5.
[5] J. Vesterstrom and R. Thomson, A comparative study of differential evolution, particle swarm optimization, and evolutionary algorithms on numerical benchmark problems, Proc. of IEEE Congress on Evolutionary Computation, 2004,pp. 1980–1987.
49
Thanks for your attention
50
51
Homework
Experiments:
1. Implement BDE for 3-CNF problem