chaîne de mesure - lpsclpsc.in2p3.fr/jmdeconto/fichiers/chaine_mesure s4.pdf · la compensation...
TRANSCRIPT

Jean-Marie De Conto
IUT1 Grenoble – Mesures Physiques
Chaîne de mesure
1

La chaîne d’acquisition
Extraction de l’information: capteur - Physique
Conversion en signal utile: conditionneur- Electronique
Traitement analogique du signal: filtrage et amplification (d’instrumentation)
Sélection – Multiplexage
Numérisation, traitement et exploitation
2

Plan du cours 1/2
3
Description générale de la chaîne de mesure : Le capteur, le conditionneur, le filtrage,
l’échantillonnage et la conversion A/N
Les problèmes posés lors de la conception de la chaîne
Linéarité de la chaîne de mesure. Grandeurs d’influence et métrologie associée.
Résolution. Bruit.
Rapidité et bande passante : circuits du premier et du second ordre
Problématique générale : la transformation de Laplace (généralisation de l’impédance
complexe)
Le filtrage sur quelques exemples. Passe-bas du premier ou nième ordre. Passe bande et passe haut
sur quelques exemples.
Le capteur. Revue de quelques capteurs (sera supprimé du cours de S1). Ordres de grandeurs des
signaux de sortie : courant/tension ou charge par exemple
Le conditionneur : pont de Wheastone avec impédance quelconque en courant ou tension. Calcul
général de la tension de déséquilibre (pas de détails sur les divers types de pont type Sauty ou
Nernst)
Circuits de conditionnement à AO. Linéarisation.
Un exemple commenté : électrocardiogramme. Circuits constitutifs.

Plan du cours 2/2
4
La compensation des grandeurs d’influence. Exemple avec une jauge d’extensométrie. Mesure de température avec 3 fils.
L’amplificateur d’instrumentation. Réjection de mode commun
Les offsets en courant et tension, autozéro
Les perturbations électromagnétiques : le problème de masses et de la terre, blindage magnétique et électromagnétique. La connexion du blindage coaxial. Piste de garde sur un exemple.
Taux de réjection du mode commun en cas d’asymétrie des voies
Signaux rapides et ligne de transmission
Echantillonnage. Théorème de Shannon. Les divers échantillonneurs-bloqueurs
Conversion analogique numérique et numérique analogique.
Le filtrage numérique
Elément de traitement de signal des signaux numérisés. Exemples.

Généralités
5

Grandeurs caractéristiques: vocabulaire, notions
intuitives
Grandeur à mesurer: mesurande m
Valeur obtenue: mesure M
Etendue de mesure (EM)
Incertitude um
Incertitude relative à l’étendue
Résolution Ex: convertisseur A/N 12bits
Nombre de valeurs distinctes associables au mesurande dans l’étendue de mesure
prèsCuà
CCCTTex
mmEM
o
ooo
1
600100700 :
m
minmax
minmax
minmaxmm
um
p
min
minmax
M
MM
Mm
6

Grandeurs d’entrée et de sortie, sensibilité
Exemple: sonde PT100
𝑅 𝑇 = 𝑅0 ∙ 1 + 𝛼𝑇
𝑉𝑚 =𝑅0∙ 1+𝛼𝑇
𝑟+𝑅0∙ 1+𝛼𝑇∙ 𝑉𝑔
T est la grandeur d’entrée
Vm est la grandeur de sortie Vm
Vg
Vm pour Vg=1 volt
r
R(T)
7

Sensibilité (sur cet exemple)
La sensibilité est la dérivée de la grandeur de sortie par rapport à celle d’entrée
𝑉𝑚 =𝑅0∙ 1+𝛼𝑇
𝑟+𝑅0∙ 1+𝛼𝑇∙ 𝑉𝑔
→ 𝑆 =𝛼𝑅0𝑟 ∙ 𝑉𝑔
𝑟 + 𝑅0 ∙ 1 + 𝛼𝑇 2
Constante si le système est linéaire
𝑆 =𝑑𝑉𝑚𝑑𝑇
8

Remarque
9
La sensibilité est faible: le capteur prélève toujours une
énergie infime (sinon il perturbe la mesure). La mesure doit
donc être effectuée avec soin. La mesure est sensible aux
parasites et le montage du capteur doit également être
effectué avec soin.

La chaîne de mesure linéaire
10
Quand la grandeur de sortie varie linéairement avec celle d’entrée.
De manière nominale (avec un gain nominal et un décalage de zéro nominal –offset-)
𝑦𝑛 = 𝐺𝑛 ∙ 𝑥 + 𝑦0𝑛
Dans la réalité on n’est jamais dans les conditions nominales:
𝑦 = 𝐺 ∙ 𝑥 + 𝑦0
Soit parce qu’une grandeur externe influe sur ces paramètres (ex: température: on parle de grandeur d’influence)
Soit parce que ces paramètres varient avec ce que l’on mesure (exemple gain versus fréquence)
Soit parce que l’on n’a pas exactement les valeurs nominales (fluctuations, instabilités) incertitudes

Variations: exemples 1/2
11
𝑦𝑛 = 𝐺𝑛 ∙ 𝑥 + 𝑦0𝑛
Exemple de la température (grandeur d’influence)
𝐺 = 𝐺𝑛 ∙ 1 + 𝛼∆𝑇
𝑦0 = 𝑦0 + 𝛽 ∆𝑇
Erreur commise:
∆𝑦 = 𝐺𝑛 ∙ 𝛼∆𝑇 ∙ 𝑥 + 𝛽∆𝑇 = 𝐺𝑛 ∙ 𝛼 ∙ 𝑥 + 𝛽 ∙ ∆𝑇

Variation (2/2) et Bilan des incertitudes
12
Exemple de la fréquence:
Passe-bas du premier ordre: 𝐺 𝑓 =𝐺0
1+𝑓2
𝑓𝑐2
fc est la fréquence de coupure (à 3dB pour le premier ordre)
Incertitudes sur les caractéristiques de la chaîne:
𝑦𝑛 = 𝐺𝑛 ∙ 𝑥 + 𝑦0𝑛
𝑢𝑦2 = 𝐺𝑛
2 ∙ 𝑢𝑥2 +𝑥2 ∙ 𝑢𝐺
2 + 𝑢𝑦02

Erreur de linéarité
G: gain
y0: décalage de zéro (“offset”)
Erreur de linéarité Écart maximal entre la mesure et la droite
de régression, ramené à la pleine échelle
0yGxy
0
10
20
30
40
50
0 5 10 15 20
C
y = 2,9284 + 2,0002x R= 0,99996
C
minmax
max,)(
yy
yL
L
Nota: linéarité obligatoire???
Linéarisation: courbe d’étalonnage 13

Rapidité, bande passante
14

Systèmes linéaires du premier et du second ordre
Système linéaires
Systèmes régis par une équation différentielle du type (à coefficients
constants réels)
)()()()()()(
)()(2121
22
11tststete
tste
tste
15
)()()()(
)()()(
2
2
tetCsdt
tdsB
dt
tsdA
tetBsdt
tdsA

Exemple: mesure de température
16
T: température à mesurer
Tcap: température du capteur
𝑚𝑐 ∙ 𝑑𝑇𝑐𝑎𝑝 = 𝑑𝑄 = 𝐾 𝑇 − 𝑇𝑐𝑎𝑝 ∙ 𝑑𝑡
𝑚𝑐 ∙𝑑𝑇𝑐𝑎𝑝
𝑑𝑡+ 𝐾𝑇𝑐𝑎𝑝 = 𝐾𝑇
Question1: temps de réponse à une variation brusque de T (rapidité)?
Question2: température du capteur quand T varie sinusoïdalement, selon la fréquence de T (aspect bande passante)?
NB: K=coefficient d’échange, c=capacité calorifique, m=masse capteur

Cas de la transition brusque de T=0 à T=T1
17
𝑚𝑐 ∙𝑑𝑇𝑐𝑎𝑝
𝑑𝑡+ 𝐾𝑇𝑐𝑎𝑝 = 𝐾𝑇1
A pour solution
𝑇𝑐𝑎𝑝 = 𝐶 ∙ 𝑒−𝑡𝜏 + 𝑇1
𝜏 = 𝑚𝑐/𝐾 homogène à un temps
Preuve: le vérifier ou voir le cours de maths de S1
Pour t=0 il faut Tcap=0 (transition brusque) donc C=-T1
𝑇𝑐𝑎𝑝 = 𝑇1 ∙ 1 − 𝑒−𝑡𝜏

Evolution de la température
18
Température normalisée à T1=1
Echelle des temps en unités de la constante de temps
Temps requis pour que la température soit stable à 𝜀 près:
1 − 𝑒−𝑡𝜏 = 1 − 𝜀 → 𝑡 = −τ ∙ ln(ε)
Ex: 𝜀 = 0.05 → 𝑡 = 3𝜏

Cas où T varie sinusoïdalement
19
𝑚𝑐 ∙𝑑𝑇𝑐𝑎𝑝
𝑑𝑡+ 𝐾𝑇𝑐𝑎𝑝 = 𝐾 ∙ 𝑇1 ∙ cos 𝜔𝑡
Equation du type
On travaille avec les grandeurs complexes
)()()(
tetBsdt
tdsA
)(
tj
tj
Ses
Eee
A
B
EGE
BAB
E
BjA
ESESeBjA
c
c
j
).(
1
1)(
2
2222
Gain en continu: 𝐺0 = 1/𝐵
Gain à 𝜔 = 𝜔𝑐 : 𝐺 𝜔𝑐 = 𝐺0/ 2
Fréquence de coupure à 3dB: 𝑓𝑐 =𝐵
2𝜋𝐴

𝐺(𝜔) normalisé à B=1 et exprimé en fonction de 𝜔
𝜔𝑐=
𝑓
𝑓𝑐
w/wc
Gain: 3dB/octave
20
Gain constant à 5% près à partir du régime continu si
1
1 + 𝑓/𝑓𝑐2= 0.95
→𝑓
𝑓𝑐= 0.32
→ 𝑓𝑚𝑎𝑥 = 0.32 ∙ 𝑓𝑐
𝑓𝑐 =𝐵
2𝜋𝐴=
𝐾
2𝜋𝑚𝑐

21

Second ordre )()()()(
)()()(
2
2
tetCsdt
tdsB
dt
tsdA
tetBsdt
tdsA
−𝐴𝜔2 + 𝑗𝐵𝜔 + C ∙ 𝑒𝑗𝜑 ∙ 𝑆 = 𝐸
𝐺 =𝑆
𝐸=
1
−𝐴𝜔2 + 𝑗𝐵𝜔 + C ∙ 𝑒𝑗𝜑=
𝑒𝑗𝜑
1 −𝜔2
𝜔𝑐2 + 𝑗 ∙ Q ∙
𝜔𝜔𝑐
∙1
𝐶
𝜔𝑐 =𝐶
𝐴 est la pulsation de coupure (mais pas à 3 dB!!!)
𝑄 =𝐵
𝐴𝐶 est le facteur de qualité
On pose parfois 𝜁 =𝑄
2
𝐺0 =1
𝐶 est le gain en régime continu
𝐺 =𝐺0
1 −𝜔2
𝜔𝑐2
2
+ 𝑄2 𝜔𝜔𝑐
2
𝜑 = −arctan Q ∙𝜔
𝜔𝑐∙
1
1 −𝜔2
𝜔𝑐2

𝜁de 0.1 à 1
w/wc
GAIN

Capteurs et conditionnement
Revue de quelques capteurs
Conditionnement (ponts, amplificateurs opérationnels)
24

Capteurs capacitifs
Capacité d’un condensateur plan
Cylindrique
Modification de la permittivité Température
Hygrométrie
Niveau de liquide isolant
Modification de la géométrie Pression (microphone)
Pression de fluide – membrane
Déformation de solide (jauge extensométrique)
120
0
/ln2
rr
LC
e
SC
r
r
Figure 8.7 p114 capteurs
Exemple de capteur de pression avec conversion par variation de capacité (Doc. VEGA).
25

Capteurs résistifs
Résistances métalliques Ex: platine (-200+1000oC)
Thermistances Agglomérés d’oxydes métalliques
Jauges d’extensométrie Métalliques (K=2..4) A semi-conducteurs (K=+-
50..+-200)
320 1)( CTBTATRTR
00
11exp)(
TTBRTR
L
LK
R
R
26

•Sous ampoule de verre
•Protection
•Inertie thermique: dizaines de secondes à plusieurs minute
•En couche mince
27

Du réseau simple à la haute technologie
28

Capteurs inductifs (inductance variable)
29
Détecteur de position Sytème simple mais non-linéaire
Détecteur de position constitué de deux capteurs travaillant en opposition Système dit push-pull, qui linéarise le système précédent
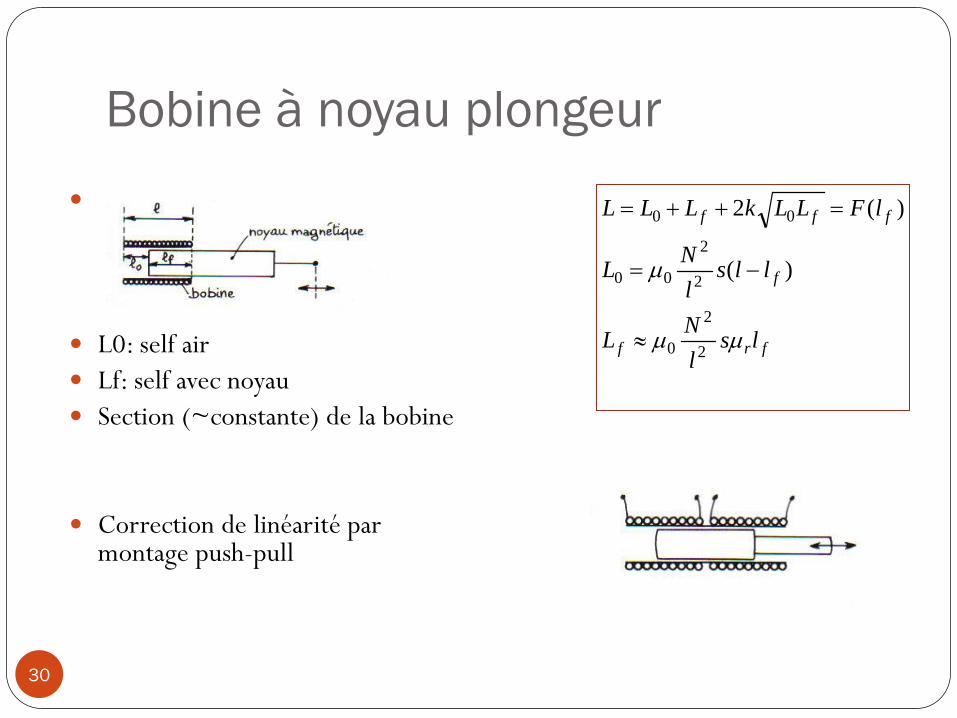
Bobine à noyau plongeur
L0: self air
Lf: self avec noyau
Section (~constante) de la bobine
Correction de linéarité par montage push-pull
frf
f
fff
lsl
NL
llsl
NL
lFLLkLLL
2
2
0
2
2
00
00
)(
)(2
30

Mesure d’intensité en régime impulsionnel
n1.i1 = n2.i2 + n1.i10
La précision sur la mesure de i1 est d’autant meilleure que le courant magnétisant i10 est faible.
La diminution du courant magnétisant est obtenue par: une faible résistance de l’enroulement secondaire
un excellent couplage magnétique de l’enroulement secondaire (qualité du bobinage)
l’emploi d’un circuit magnétique à très forte perméabilité
Si secondaire ouvert n1.i1 = n1.i10. flux très important, pertes considérables dans le circuit magnétique et destruction
tension importante et dangereuse aux bornes du secondaire
Mesures en continu: capteur à effet HALL
31

Exemple: Mesure de forme d’impulsion dans
un accélérateur (Bergoz)
Pourquoi 50 ohms? 32

Effet Hall
Un champ magnétique appliqué sur un conducteur ou un
semi-conducteur d’épaisseur « e » crée une différence de
potentiel entre les bords du conducteur (q: charge
élémentaire, n densité électronique en électrons/m3)
33 qn
Kh
1
8
3
Be
I
qnV e
hall
1

Exemples: gaussmètres
34

Gaussmètres, suite
De quelques centièmes de gauss à quelques teslas.
Sondes axiales ou radiales
Calibration avec chambre de zéro
Zone active: de 1 à quelques mm2
Linéarité au %
Pour des mesures de précision ou absolues: sondes NMR ou
RMN
35

Application: mesure de courant continu, non interceptive Un circuit magnétique constitué de ferrite permet de canaliser le flux crée par le conducteur parcouru par
le courant I . Un générateur de courant constant fournit le courant Io. Une tension Vh proportionnelle au courant Io et à l'induction produite par le courant I apparait . Cette tension est amplifiée pour fournir un courant i dans les N spires du bobinage secondaire, de façon à produire un flux opposé à celui crée par I.
A l'équilibre: B = 0 et I = N * i
36

Le montage potentiométrique 1/3
Attention aux grandeurs qui interviennent
Résistance générateur et entrée appareil
Capacités parasites (dont entrée appareil)
Conditionnement très simple
Figure ash p57
cd
cs
cs
csdsc
dcsm
RR
RRR
Re
RRRRRRR
RRev
111 )()(
Inconvénient: sensible aux parasites et aux dérives du générateur

Le montage potentiométrique 2/3
Si le capteur est linéaire et R1 fixe, le conditionnement n’est pas linéaire
Si le capteur est linéaire et que R1 est un capteur tel que R1+Rc=cte alors
le conditionnement est linéaire (montage “PUSH PULL”).
Si le capteur n’est pas linéaire on peut linéariser autour d’une valeur m0 du
mesurande en choisissant R1 telle que
𝑑2𝑣𝑚𝑑𝑚2
𝑚=𝑚0
= 0
Figure ash p57 cd
cs
cs
csdsc
dcsm
RR
RRR
Re
RRRRRRR
RRev
111 )()(

Montage potentiométrique (3/3) (linéarisation série)
39
Exemple d’une thermistance: 𝑅 = 𝑅0 ∙ 𝑒𝑎
𝑇 avec R0=20 kΩ et
a=944K 𝑣𝑠𝑒𝑠
=𝑅
𝑟 + 𝑅
Dérivée seconde par rapport à T nulle pour 𝑟 =𝑅(𝑇0)∙ 𝑎−2𝑇0
𝑎+2𝑇0=
169𝑘Ω. On prend T0=273 k
A gauche: 20 kΩ A droite: 169 kΩ

Les ponts de mesure: objectifs
Annuler la tension résiduelle
la tension mesurée n’est pas nulle pour m=0
La composante permanente est grande par rapport à ses variations
Résoudre le problème des capacités parasites: mesures différentielles
Fournir des moyens de compenser les grandeurs d’influence.
Compenser les dérives d’alimentation

Ash page 54
Cinq types de
conditionnement

Sensibilité d’un pont
Dépend du choix des impédances du pont
c
mccdtcap
c
mcdt
ccap
Z
v
m
ZSSS
Z
vS
m
ZS
Figure c ash p54

Equilibrage du pont
Mesure d’une tension de déséquilibre
On néglige l’effet des impédances d’entrée des appareils de mesure
Une des impédances est le capteurs
Les autres servent à équilibrer, à linéariser ou compenser les grandeurs d’influence
V
Vg Vd
Vmes Z2
Z3
Z4
Z1
dgmes
d
g
VVV
ZZ
ZVV
ZZ
ZVV
43
3
21
1
324143
3
21
1 00 ZZZZZZ
Z
ZZ
ZVmes
Cas de résistances pures: Pont de Wheastone

Pont de Wheastone déséquilibré (courant ou tension).
Se généralise à des impédances quelconques
Principe du pont De une à quatre résistances peuvent varier
am ERRRR
RRRRv
))(( 4321
4132
am I
RRRR
RRRRv
4321
4132
RRR
RRi
02
0
4
21
1
0
0
a
m
E
R
RR
Rv
4
41
1
0
a
m
I
R
RRv

Divers types de ponts
Mesures capacitives
Pont de Sauty (capacité
air)
Pont de Nernst

Divers types de ponts
Mesures inductives
Pont de Maxwell
Pont de Hay

Une impédance complexe c’est quoi?
En haute fréquence, il n’y a pas de résistance, de capacité ou d’inductance
pure
Il y a toujours, notamment, une capacité parasite
On peut MODELISER une capacité ou une inductance
Figure ash page 83

Exemple déjà vu: capteurs résistifs
Montage 4 fils
Exemple: mesure d’une résistance en platine pour mesure de température
Mesure assez grossière
Inadapté pour de petites variations de température, donc de résistance
La solution: montage en pont (déséquilibré)
Montage 4 fils

Cas de deux résistances variables
Exemple: jauges extensométriques
Deux déformations égales et de signe opposé (push pull)
Elimination de la variation de la résistance des fils de liaison Rl qui est commune –et disparaît dans la différence-
202
101
043
RRR
RRR
RRR
4
21
1
0
210
12 am
E
R
RRR
RRv
4
21
1)(
0
21
12
a
m
I
R
RRRRv
Possibilité de compenser. Exemple:
202
am
E
R
RvRRR

Montage 3 fils
élimination de la résistance des fils de liaison
l
l
RRR
RR
2
1
4
21
1
0
210
12 am
E
R
RRR
RRv
40
am
E
R
Rv

Enfin: Système à quatre résistances variables
Exemple: capteur de pression constitué de 4 jauges
extensométriques montées en pont sur un diaphragme
104
103
02
01
RRR
RRR
RRR
RRR
am
am
IRv
ou
ER
Rv
0
Push pull + compensation d’une grandeur d’influence

Linéarisation du pont
am
am
a
ER
Rv
EvIRRIR
R
EI
0
00
0
2
)(
2
am
aadroit
aampli
agauche
ER
Rv
R
ERRE
RI
R
ERRv
R
EI
0
00
0
2
)(2
1
)(

Conditionnement de signal : linéarisation
Résoud le problème précédent
0
0
21
1
4
c
cc
csm
R
RR
REv
ref
s
c
cc
cs
ref
m
ml
ref
lmmml
ref
lm
ref
yx
E
Eb
R
RR
RE
E
bv
avv
E
vvbavbvavv
E
vv
E
VVv
21
21
1
41
0
0
0
0
s
ref
sref
E
Eb
EE
2
à nelproportion

Thermocouples: lois physiques
Effet Peltier: à la jonction de deux conducteurs A et B différents mais à même température apparaît une fem
Effet Thomson: entre deux points M et N à température différente au sein d’un même métal homogène apparaît une fem
𝑢𝑇 = 𝐶𝑇 ∙ 𝑑𝑇𝑇𝑁
𝑇𝑀
Thermocouple: effet Seebeck = Peltier+thomson
Obtention d’une tension qui dépend de la différence de température
Besoin de compenser la température de soudure froide 54

55

56

Pour tout savoir: consultez le catalogue!
Les plus: le prix, pas de pièces mobiles, grande gamme, assez rapide,
bonne répétabilité
Les moins: faible sensibilité (50V/oC environ). Basse fem et donc
sensible au bruit. Sensibilité limitée environ au demi degré
Non linéaires mais la courbe est connue
Compensables facilement
57

58

59

Capteurs générant un courant: photodiode
Hamamatsu
Silicon Photodiode Silicon PIN Photodiode Silicon Photodiode Array With Preamp / Cooler Silicon APD - Avalanche APD Modules X-ray Detector Two-color Detector
Silicon Photodiode: Featuring high sensitivity and low dark current, these photodiodes are specifically designed for precision photometry in a wide range of fields. PIN Photodiodes: Deliver a wide bandwidth with a low bias, making them ideal for high-speed photometry as well as optical communications.
Diode PIN, avalanche??? 60

Photodiode (HP)
dd SIIII 00
I0: Courant inverse
Φ: puissance incidente
61

Montages de base Augmenter Rm (base): réduit le bruit mais aussi la rapidité
C2 compense Cp1 (R1Cp1=R2C2) – Montage rapide
Le courant d’entrée et la dérive thermique doivent rester faibles pour le second
montage.
(rapide)
)(classique
r
rm
IRRv
IR
RRv
210
1
20 1

Montages photovoltaïques A réponse linéaire
Mesure de Icc
Logarithmique
Mesure de Vco en circuit ouvert
(log) V
(linéaire)
co
1
20
0
1R
Rv
IRv ccm

Applications/exemples
Mesure de rayons X ou béta
Convertisseur lumière fréquence
http://www.sales.hamamatsu.com/en/products/solid-state-division/si-photodiode-series/si-photodiode/applications.php
Montage photovoltaïque
64

Conditionneur du capteur source de courant
Convertisseur courant-tension à ampli-op.
Circuit idéalisé (de principe)
Objectif: Faire R élevée Coût Bruit Encombrement Montage en T
iRv + -
R
i
3
212
3
21 11
R
RiRR
R
RRiv
Inconvénient: Offset et bruit
de fond accrus en sortie
Ampli
Courant polarisation<<courant à mesurer
Anneau de garde

Conditionneur du capteur source de charge
Cas simplifié Le condensateur accumule la charge
Cas réel il faut assurer la circulation du courant de polarisationrésistance Les câbles de liaison ont une influence considérable
HF: v est divisé par Ccable
BF: v est divisé par Rcable Ne pas modifier les câbles!
C
Qv
Cp
iiZv
0
0 Q)(I nintégratio
haut passe
RCp
RCp
C
pQv
1
)(0

Amplification
67

Amplification en sortie de pont
L’amplificateur à utiliser:
amplificateur différentiel
Tension de mode commun
Tension différentielle
2
2
2
2
1
21
12
dmc
dmc
mc
d
vvv
vvv
vvv
vvv

Principe de l’amplificateur différentiel
Amplificateur: non parfaitement
symétrique
Tension différentielle d’entrée
Tension de mode commun d’entrée
2
12
12
120
iimci
iidi
ii
vvv
vvv
vGvGv

Bilan
Tension de sortie
Gain différentiel
Gain de mode commun
Taux de réjection du mode commun (Common Mode Rejection Ratio) en dB
Ex: CMRR=105↔100 dB
GG
GG
G
G
GGG
GGG
vGGvGG
v
mc
dr
mc
d
mcidi
2
1
2
20
Le CMRR décroît avec la fréquence, mais aussi selon les liaisons avec la source de signal

Les impédances d’entrée de l’amplificateur
Entre bornes d’entrée: impédance d’entrée différentielle Zid
Entre borne et masse de l’amplificateur: impédance de mode commun Zmc
Grande résistance, capacité faible: fréquence de coupure BASSE

Sources de déséquibre entre voies (exemple)
Déséquilibre série: l’impédance des câbles de liaison
introduit une différence sur la tension différentielle
aux bornes de l’ampli
2,1
11
2
22
2
ZZ
vZZ
Zv
vZZ
Zv
mc
mc
mci
mc
mci
mcmc
dmcmc
ddi vZ
Zvv
Z
ZZvv
21
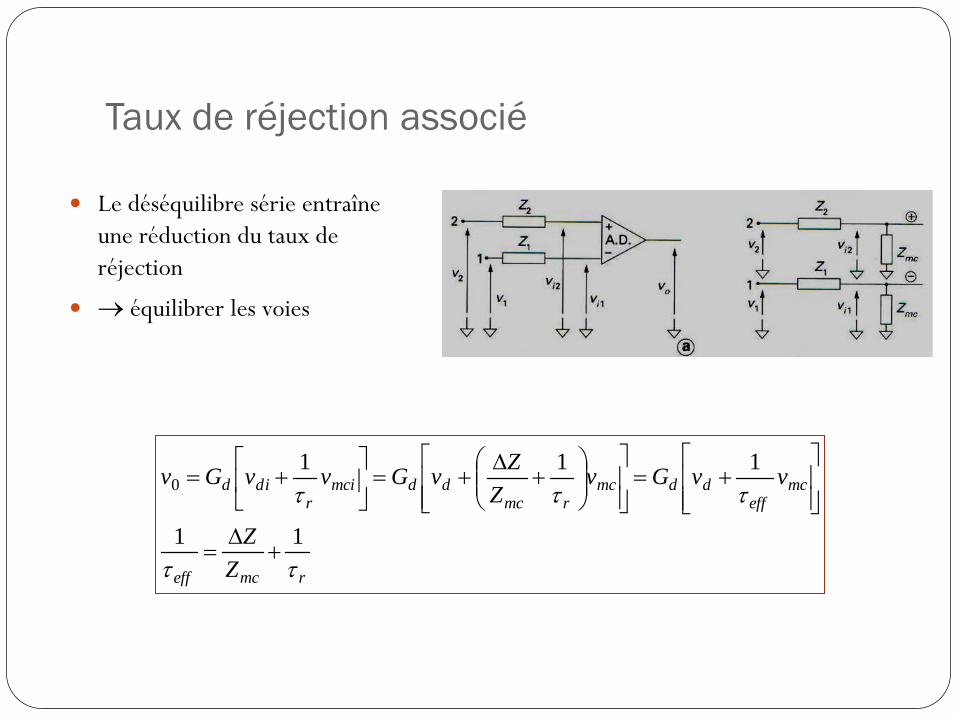
Taux de réjection associé
Le déséquilibre série entraîne
une réduction du taux de
réjection
équilibrer les voies
rmceff
mceff
ddmcrmc
ddmcir
did
Z
Z
vvGvZ
ZvGvvGv
11
1110