capitulo4 tcmi conducao multirp 2009 - faculdade de … · a equação da condução de calor, que...
TRANSCRIPT
79
4. Condução de Calor Multidimensional em Regime Permanente
A equação da condução de calor, que é o processo de transferência de energia que
ocorre na fronteira de um sistema em repouso devido a um gradiente de temperatura, tem sido
deduzida em muitos livros. Essa equação genérica é da forma:
( , )( , ) ( , ) pT r tq r t q r t C
tρ ∂′′′−∇ + =
∂i (4.1)
na qual o primeiro termo do membro do lado esquerdo da equação representa a taxa de calor
entrando através da superfície do sistema, o segundo termo representa a taxa de geração por
unidade de volume e o termo do lado direito da equação representa a taxa de armazenamento
de energia dentro do sistema.
No caso de meios ou materiais em que a condutividade térmica independe da direção
(meios isotrópicos), o vetor fluxo de calor pode ser definido na seguinte forma (Lei de
Fourier):
q k T= − ∇ (4.2)
em que k é a condutividade térmica que pode ser uma função da temperatura, ( )k k T= .
A expressão para os componentes do fluxo de calor, em sistemas de coordenadas
curvilíneas ortogonais ( )1 2 3, ,x x x , é da forma
1 ; 1,2,3ii i
Tq k ih x∂
= − =∂
(4.3)
na qual ih são fatores de escalas que aparecem em transformações de coordenadas de um
sistemas de coordenadas para outro, em que se conheçam as relações,
( )1 2 3, , ; 1,2,3i ix x u u u i= = com ( )1 2 3, ,u u u sendo a tripla de coordenadas no novo sistema.
Os fatores de escalas são definidos na forma
23
2
1
ji
j i
xh
u=
∂⎛ ⎞= ⎜ ⎟∂⎝ ⎠∑ (4.4)
Nos sistemas de coordenadas cartesianas, cilíndricas e esféricas têm-se os dados na
Tabela 4.1

80
Tabela 4.1 – Sistemas de coordenadas ortogonais e fatores de escalas
Coordenadas Cartesianas Cilíndricas Esféricas 1u x r r
2u y θ θ
3u z z φ
1x x r.cos(θ ) r.cos(θ )sen(φ )
2x y r.sen(θ ) r.sen(θ )sen(φ )
3x z z r.cos(φ )
1h 1 1 1
2h 1 r ( )r sen φ⋅
3h 1 1 r
No sistema de coordenadas cartesianas ( ), ,x y z , os fluxos de calor ficam, então,
definidos como
1Tq kx
∂= −
∂ (4.5a)
2Tq ky
∂= −
∂ (4.5b)
3Tq kz
∂= −
∂ (4.5c)
Para coordenadas cilíndricas ( ), ,r zθ resulta:
rTq kr
∂= −
∂ (4.6a)
Tq krθ θ∂
= −∂
(4.6b)
zTq kz
∂= −
∂ (4.6c)
Para coordenadas esféricas ( ), ,r θ φ resulta:
rTq kr
∂= −
∂ (4.7a)
( )Tq k
rsenθ φ θ∂
= −∂
(4.7b)
Tq krφ φ∂
= −∂
(4.7c)

81
A partir das Equações (4.1) e (4.3) pode-se obter
( ) ( ) ( )2 3 1 1 3 2 1 2 3
1 2 3 1 2 3
1p
h h q h h q h h q Tq Ch h h x x x t
ρ⎡ ⎤∂ ∂ ∂ ∂′′′+ + + =⎢ ⎥∂ ∂ ∂ ∂⎣ ⎦
num domínio , 0tΩ > (4.8)
Substituindo os fluxos de calor dos sistemas de coordenadas (equações (4.5) a (4.7))
obtêm-se as equações para os sistemas de coordenadas cartesianas, cilíndricas e esféricas
como a seguir.
- Sistema de coordenadas retangulares:
( , , , ) pT T T Tk k k q x y z t C
x x y y z z tρ
⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞ ′′′+ + + =⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠ (4.9)
- Sistema de coordenadas cilíndricas:
2
1 1 ( , , , ) pT T T Tkr k k q r z t C
r r r r z z tθ ρ
θ θ∂ ∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ′′′+ + + =⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(4.10)
- Sistema de coordenadas esféricas:
( ) ( ) ( )22 2 2 2
1 1 1
( , , , ) p
T T Tkr k ksenr r r r sen r sen
Tq r t Ct
φφ θ θ φ φ φ
θ φ ρ
⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞+ + +⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠∂′′′+ =∂
(4.11)
As condições de contorno em problemas de condução podem ser escritas na seguinte
forma genérica, para uma superfície iS normal a um eixo de coordenadas ix
i
i i iì S
Tk T fn
γ∂+ =
∂∓ sobre , 0iS t > (4.12)
Assume-se que o domínio Ω tem um número de superfícies contínuas , 1, 2, ,iS i s= … em
número, tal que cada superfície iS coincide com a superfície do sistema de coordenadas
ortogonal escolhido. As combinações 0, 1i ik γ= = ou 1, 0i iδ γ= = recuperam as condições
de contorno de primeiro ou de segundo tipos respectivamente. O sinal mais ou menos depende
se a normal a iS está apontando no sentido positivo ou negativo da direção ix
respectivamente.

82
A condição inicial geralmente é da forma:
( ) ( ),T r t F r= para 0t = no domínio Ω (4.13)
Os métodos de solução da equação de condução podem ser analíticos exatos, métodos
analíticos aproximados ou métodos numéricos dependendo da complexidade do problema a
ser analisado. Os métodos analíticos englobam os métodos de Separação de Variáveis,
Técnica de Transformada Integral, Técnica de Transformada de Laplace, por exemplo. Os
métodos analíticos aproximados incluem o Método Integral, Método de Rayleigh-Ritz,
Método de Galerkin, entre outros. Os métodos numéricos clássicos são: Método de Diferença
Finita, Método de Volume Finito e Método de Elemento Finito. Um método numérico
também usado é o método de Monte-Carlo. Alguns destes métodos serão descritos a seguir.
4.1 Soluções Analíticas
O método analítico clássico em problemas de condução de calor homogêneos é o
método de separação de variáveis. O procedimento de separação de variáveis pode ser
aplicado também ao caso dos problemas em regime permanente sem geração de calor quando
apenas uma das condições de contorno seja não homogênea. Se várias condições de contorno
são não homogêneas é possível separar o problema original em um conjunto de problemas em
que cada um dos subproblemas tenha apenas uma condição de contorno não homogênea.
Considere, por exemplo, o problema de condução multidimensional homogêneo em regime
permanente com condição de contorno não homogênea definido a seguir:
( )2 0T r∇ = num domínio Ω (4.14a)
i i iì
Tk hT fn∂
+ =∂
sobre iS (4.14b)
O problema definido por (4.14) pode ser separado em um conjunto de problemas mais
simples de forma que apenas uma condição de contorno permaneça não homogênea. Cada
subproblema será governado pelas seguintes equações
( )2 0jT r∇ = num domínio Ω (4.15a)
ji i j ij i
ì
Tk hT f
nδ
∂+ =
∂ sobre iS (4.15b)

83
nas quais
1, 2, ,1, 2, ,
1 se 0 se ij
i sj s
i ji j
δ
==
=⎧= ⎨ ≠⎩
……
A solução para a distribuição de temperatura será a superposição das soluções dos problemas
mais simples na forma
( ) ( )1
s
jj
T r T r=
=∑ (4.16)
Considere o seguinte caso de condução num paralelepípedo
0 , 0 , 0x a y b z c≤ ≤ ≤ ≤ ≤ ≤ com as condições de contorno definidas a seguir
2 2 2
2 2 2 0T T Tx y z
∂ ∂ ∂+ + =
∂ ∂ ∂ em 0 , 0 , 0x a y b z c< < < < < < (4.17a)
0T T= em 0x = ; T T∞= em x a= (4.17b, c)
1Tk qy
∂ ′′− =∂
em 0y = ; 1 1Tk hT hTy ∞
∂+ =
∂ em y b= (4.17d, e)
2Tk qz
∂ ′′− =∂
em 0z = ; 2 2Tk h T h Tz ∞
∂+ =
∂ em z c= (4.17f, g)
Como todas as condições de contorno são não homogêneas, inicialmente, faz a
seguinte mudança de variável T Tθ ∞= − , que homogeneíza três condições de contorno
resultando 2 2 2
2 2 2 0x y zθ θ θ∂ ∂ ∂+ + =
∂ ∂ ∂ em 0 , 0 , 0x a y b z c< < < < < < (4.18a)
0θ θ= em 0x = ; 0θ = em x a= (4.18b, c)
1k qyθ∂ ′′− =∂
em 0y = ; 1 0hy kθ θ∂+ =
∂ em y b= (4.18d, e)
2k qzθ∂ ′′− =∂
em 0z = ; 2 0hz kθ θ∂+ =
∂ em z c= (4.18f, g)
Agora propõe-se a separação do problema (4.18) em três problemas mais simples,
cada um deles com apenas uma condição de contorno não homogênea, pela seguinte
superposição:
( ) ( ) ( ) ( )1 2 3, , , , , , , ,x y z x y z x y z x y zθ θ θ θ= + + (4.19)
84
Pode-se obter os seguintes três problemas:
Problema 1 2 2 2
1 1 12 2 2 0
x y zθ θ θ∂ ∂ ∂
+ + =∂ ∂ ∂
em 0 , 0 , 0x a y b z c< < < < < < (4.20a)
1 0θ θ= em 0x = ; 1 0θ = em x a= (4.20b, c)
1 0yθ∂
=∂
em 0y = ; 1 11 0h
y kθ θ∂+ =
∂ em y b= (4.20d, e)
1 0zθ∂
=∂
em 0z = ; 1 21 0h
z kθ θ∂
+ =∂
em z c= (4.20f, g)
Problema 2 2 2 2
2 2 22 2 2 0
x y zθ θ θ∂ ∂ ∂
+ + =∂ ∂ ∂
em 0 , 0 , 0x a y b z c< < < < < < (4.21a)
2 0θ = em 0x = ; 2 0θ = em x a= (4.21b, c)
21k q
yθ∂ ′′− =∂
em 0y = ; 2 12 0h
y kθ θ∂
+ =∂
em y b= (4.21d, e)
2 0zθ∂
=∂
em 0z = ; 2 22 0h
z kθ θ∂
+ =∂
em z c= (4.21f, g)
Problema 3 2 2 2
3 3 32 2 2 0
x y zθ θ θ∂ ∂ ∂
+ + =∂ ∂ ∂
em 0 , 0 , 0x a y b z c< < < < < < (4.22a)
3 0θ = em 0x = ; 3 0θ = em x a= (4.22b, c)
3 0yθ∂
=∂
em 0y = ; 3 13 0h
y kθ θ∂
+ =∂
em y b= (4.22d, e)
32k q
zθ∂ ′′− =∂
em 0z = ; 3 23 0h
z kθ θ∂
+ =∂
em z c= (4.22f, g)
A solução de cada um dos três problemas por separação de variáveis fica na forma
( ) ( ) ( ) ( ), ,x y z X x Y y Z zθ = (4.23)
que substituída em qualquer das três equações (4.20a) ou (4.21a) ou (4.22a) resulta após
algumas manipulações 2 2 2
2 2 2
1 1 1 0d X d Y d ZX dx Y dy Z dz
+ + = (4.24)

85
Para o problema 1 propões-se a seguinte separação: 2
2 2 22
1 d XX dx
β γ η= = + , 2
22
1 d YY dy
γ= − e 2
22
1 d ZZ dz
η= − (4.25)
As equações separadas se tornam, então, 2
22 0d X X
dxβ− = (4.26a)
0X = em x a= (4.26b) 2
22 0d Y Y
dyγ+ = (4.27a)
0dYdy
= em 0y = (4.27b)
1 0dY H Ydy
+ = em y b= (4.27c)
22
2 0d Z Zdz
η+ = (4.28a)
0dZdz
= em 0z = (4.28b)
2 0dZ H Zdz
+ = em z c= (4.28c)
Para o problema 2 propõe-se a seguinte separação: 2
22
1 d XX dx
β= − , 2
2 2 22
1 d YY dy
γ β η= + = + e 2
22
1 d ZZ dz
η= − (4.29)
As equações separadas se tornam, então, 2
22 0d X X
dxβ+ = (4.30a)
0X = em 0x = (4.30b)
0X = em x a= (4.30c) 2
22 0d Y Y
dyγ− = (4.31a)
1 0dY H Ydy
+ = em y b= (4.31b)
22
2 0d Z Zdz
η+ = (4.32a)
0dZdz
= em 0z = (4.32b)

86
2 0dZ H Zdz
+ = em z c= (4.32c)
Para o problema 3 propõe-se a seguinte separação: 2
22
1 d XX dx
β= − , 2
22
1 d YY dy
γ= − e 2
2 2 22
1 d ZZ dz
η β γ= = + (4.33)
As equações separadas se tornam, então, 2
22 0d X X
dxβ+ = (4.34a)
0X = em 0x = (4.34b)
0X = em x a= (4.34c) 2
22 0d Y Y
dyγ+ = (4.35a)
0dYdy
= em 0y = (4.35b)
1 0dY H Ydy
+ = em y b= (4.35c)
22
2 0d Z Zdz
η− = (4.36a)
2 0dZ H Zdz
+ = em z c= (4.36b)
O Problema 1 requer a solução das equações (4.26), (4.27) e (4.28). A solução das
equações (4.27) e (4.28) correspondem ao caso 4 da Tabela 4.2, portanto, são da forma
( ) ( ), cosn nY y yγ γ= ; ( ) 1n ntg b Hγ γ = (4.37a)
( ) ( ), cosp pZ z zη η= ; ( ) 2p ptg c Hη η = (4.37b)
Para completar a solução do Problema 1, falta resolver a equação (4.26). A solução da
Equação (4.26a) que satisfaz a condição (4.26b) é do tipo
( ) ( ),m mX x senh a xβ β⎡ ⎤= −⎣ ⎦ (4.37c)
em que 2 2 2 2m np n pβ β γ η= = + (4.38)
Desta forma a solução do Problema 1 fica na forma
( ) ( ) ( ) ( )11 1
, , cos cosnp np n pn p
x y z c senh a x y zθ β γ η∞ ∞
= =
⎡ ⎤= −⎣ ⎦∑∑ (4.39)

87
Aplicando a condição de contorno em 0x = resulta
( ) ( ) ( )01 1
cos cosnp np n pn p
c senh a y zθ β γ η∞ ∞
= =
=∑∑ (4.40)
Tabela 4.2 – Solução, Norma e Autovalores da Equação 2
22 0d X X
dxβ+ = em 0 x L< < para
as condições de contorno mostradas na Tabela.
No. Condições
de Contorno
x = 0
Condições
de Contorno
x = L
Autofunções.
( ),mX xβ
Inverso da norma
( )1/ mN β
Autovalores
são as raízes
positivas de
1 1 0dX H X
dx− + = 2 0dX H X
dx+ =
1
cosm m
m
xH sen x
β ββ
++
( ) ( )2 2
2 12 21 12 2
2
2
mm
m
H HL H H
H
ββ
β
⎛ ⎞+⎜ ⎟+ + +⎜ ⎟+⎝ ⎠
( )1 22
1 2
m
m
m
tg LH H
H H
β
ββ
=
+
−
2 1 0dX H X
dx− + = 0dX
dx= ( )cos m L xβ − ( )
( )2 2
1
2 21 1
2 m
m
H
L H H
β
β
+
+ +
1m mtg L Hβ β =
3 1 0dX H X
dx− + = 0X = ( )msen L xβ − ( )
( )2 2
1
2 21 1
2 m
m
H
L H H
β
β
+
+ +
1m mctg L Hβ β = −
4 0dXdx
= 2 0dX H Xdx
+ = cos mxβ ( )( )
2 22
2 22 2
2 m
m
H
L H H
β
β
+
+ +
2m mtg L Hβ β =
5 0dXdx
= 0dXdx
= * cos mxβ m
m
2 para 0
1 para 0
L
L
β
β
≠
=
0msen Lβ =
6 0dXdx
= 0X = cos mxβ 2L
cos 0mLβ =
7 0X = 2 0dX H X
dx+ = msen xβ ( )
( )2 2
2
2 22 2
2 m
m
H
L H H
β
β
+
+ +
2m mctg L Hβ β = −
8 0X = 0dXdx
= msen xβ 2L
cos 0mLβ =
9 0X = 0X = msen xβ 2L
0msen Lβ =
Operando ambos os lados da equação (4.40) por ( )0
cosb
i y dyγ∫ e ( )0
cosc
q z dzη∫ e utilizando
a condição de ortogonalidade das autofunções resulta

88
( ) ( ) ( )0pn
np np n pn p
sen csen bc senh a N N
ηγθ β
γ η= (4.41)
da qual se obtém
( ) ( )( )0
1pnnp
n p np n p
sen csen bc
senh a N N
ηγθ
γ η β= (4.42)
que substituída em (4.59) leva a forma da solução para o Problema 1 na forma
( ) ( ) ( ) ( )( ) ( ) ( )1 0
1 1, , cos cosp npn
n pn p n p n p np
sen c senh a xsen bx y z y z
N N senh a
η βγθ θ γ η
γ η β
∞ ∞
= =
⎡ ⎤−⎣ ⎦= ∑∑ (4.43)
As normas na equação (4.43) correspondem ao caso 4 da Tabela 4.2 e, portanto, são
( )( )
2 21
2 2 21 1
21 n
n n
H
N b H H
γ
γ
+=
+ +;
( )( )
2 22
2 22 2
21 p
p p
H
N c H H
η
η
+=
+ + (4.44)
O Problema 2 requer a solução das equações 4.30 a 4.34. A solução do problema
(4.30) corresponde ao caso 9 da Tabela 4.2 é da forma
( ) ( ),m mX x sen xβ β= ; ( ) 0msen aβ = (4.45)
A solução da equação (4.31a) que satisfaz (4.31b) pode ser encontrada e é do tipo
( ) ( ) ( )1, coshn n n nY y b y H senh b yγ γ γ γ⎡ ⎤ ⎡ ⎤= − + −⎣ ⎦ ⎣ ⎦ (4.46)
na qual 2 2 2 2n mp m pγ γ β η= = + (4.47)
A solução da equação (4.32a) corresponde ao caso 4 da Tabela 4.2 e já foi mostrada na
Equação (4.37b).
A solução do Problema 2 fica na forma genérica
( ) ( )( )( )
( )21 1 1
cosh, , cos
mp mp
mp m pm p mp
b yx y z c sen x z
H senh b y
γ γθ β η
γ
∞ ∞
= =
⎧ ⎫⎡ ⎤− +⎪ ⎣ ⎦ ⎪= ⎨ ⎬⎡ ⎤−⎪ ⎪⎣ ⎦⎩ ⎭
∑∑ (4.48)
da qual se obtém
( ) ( )( )
( )( )
22
1 1 1
h, ,cos
cos
mp mp
mp m pm p mp mp
sen b yx y zk k c sen x z
y H h b y
γ γθβ η
γ γ
∞ ∞
= =
⎧ ⎫⎡ ⎤− +∂ ⎪ ⎣ ⎦ ⎪− = ⎨ ⎬∂ ⎡ ⎤+ −⎪ ⎪⎣ ⎦⎩ ⎭∑∑ (4.49)

89
Aplicando a condição de contorno (4.21d) resulta
( ) ( ) ( ){ } ( )21 1
1 1
h cos cosmp m mp mp mp mp pm p
q k c sen x sen b H h b zβ γ γ γ γ η∞ ∞
= =
′′ = +∑∑ (4.50)
Operando ambos os lados da equação (4.50) por ( )0
a
msen x dxβ∫ e ( )0
cosc
q z dzη∫ e utilizando
a condição de ortogonalidade das autofunções resulta para a constante
( ) ( )( ) ( )
12
1
1 cos 1h cos
pmmp
m m p p mp mp mp mp
sen caqck N N sen b H h b
ηββ η γ γ γ γ
⎡ ⎤−′′ ⎣ ⎦=+
(4.51)
que substituída em (4.48) leva a forma final da solução do Problema 2
( )( ) ( )
( )( )( )
( )
( ) ( )11
2 21 1 1
coshcos
1 cos, ,
h cos
mp mp
m p
mppm
m p m m p p mp mp mp mp
b ysen x z
H senh b ysen caqx y zk N N sen b H h b
γ γβ η
γηβθ
β η γ γ γ γ
∞ ∞
= =
⎧ ⎫⎡ ⎤− +⎪ ⎣ ⎦ ⎪⎨ ⎬
⎡ ⎤+ −⎡ ⎤− ⎪ ⎪′′ ⎣ ⎦⎣ ⎦ ⎩ ⎭=+∑∑
(4.52)
A norma mN corresponde ao caso 9 da Tabela 4.2. A norma pN corresponde ao caso
4 da Tabela 4.2. Assim tem-se
1 2
mN a= ;
( )( )
2 22
2 22 2
21 p
p p
H
N c H H
η
η
+=
+ + (4.53)
O Problema 3 é similar ao Problema 2, exceto a direção da condição de contorno não
homogênea. Analogamente, então, tem-se a solução de (4.36a) e (4.36b) na forma
( ) ( ) ( )2, cosh hp p p pZ z c z H sen c zη η η η⎡ ⎤ ⎡ ⎤= − + −⎣ ⎦ ⎣ ⎦ (4.54)
na qual 2 2 2 2p mn m nη η β γ= = + (4.55)
A solução para 3θ , então, será da forma
( )( ) ( )
( ) ( )( )( )
( ) ( )12
3 21 1 1
coshcos
1 cos, ,
h cos
mn mnm n
mnm n
m n m m n n mn mn mn mn
c zsen x y
H senh c za sen bqx y zk N N sen c H h c
η ηβ γ
ηβ γθ
β γ η η η η
∞ ∞
= =
⎧ ⎫⎡ ⎤− +⎪ ⎣ ⎦ ⎪⎨ ⎬
⎡ ⎤+ −⎡ ⎤− ⎪ ⎪′′ ⎣ ⎦⎣ ⎦ ⎩ ⎭=+∑∑
(4.56)
90
4.2 Métodos aproximados
Os métodos aproximados servem para estimativas de soluções quando alguma
complicação dificulta uma solução analítica. Hoje, com o grande desenvolvimento de
métodos numéricos e disponibilidade de computadores, talvez, os métodos aproximados
sejam menos utilizados. Entre os vários métodos aproximados tem-se o método integral,
método de análise de escala e métodos gráficos.
4.4.1 Método integral
Considere o problema de encontrar a máxima temperatura na seção transversal de um
condutor elétrico de dimensões L por H, cujo contorno esteja à temperatura T∞ , e com geração
interna q′′′ . Este problema é governado pela seguinte equação, supondo condutividade
térmica constante, 2 2
2 2
T T qx y k
′′′∂ ∂+ = −
∂ ∂ (4.57)
com as condições de contorno
T T∞= em / 2x L= ± (4.58a, b)
T T∞= em / 2y H= ± (4.58c, d)
A temperatura máxima para este problema ocorre na posição ( )0, 0x y= = que é o
ponto mais distante de todos os contornos. A chave do método integral é a escolha de um
perfil de temperatura que satisfaça as condições de contorno e que quando substituído na
equação integrada permita estimativa de parâmetros de interesse no problema. Definindo o
excesso de temperatura como T Tθ ∞= − . Um perfil razoável para ( ),T x y pode ser da forma
( )2 2
max, 1 1/ 2 / 2x yT x y T
L Hθ∞
⎡ ⎤ ⎡ ⎤⎛ ⎞ ⎛ ⎞= + − −⎢ ⎥ ⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
(4.59)
que satisfaz as condições de contorno e no qual maxθ é a incógnita. Integrando a equação
(4.57) tem-se
2 2/ 2 / 2
2 2/ 2 / 2
L H
L H
T T qdxdy HLx y k− −
′′′⎛ ⎞∂ ∂+ = −⎜ ⎟∂ ∂⎝ ⎠
∫ ∫ (4.60)
91
Derivando a equação (4.59) em relação a x e y duas vezes obtém-se 22
max2 2
8 1 4T yx L H
θ ⎡ ⎤∂ ⎛ ⎞= − −⎢ ⎥⎜ ⎟∂ ⎝ ⎠⎢ ⎥⎣ ⎦ (4.61a)
22max
2 2
8 1 4T xy H L
θ ⎡ ⎤∂ ⎛ ⎞= − −⎢ ⎥⎜ ⎟∂ ⎝ ⎠⎢ ⎥⎣ ⎦ (4.61b)
Substituindo (4.61a, b) em (4.60) e integrando o lado esquerdo resulta 2 2
max163
H L q HLHL k
θ′′′⎛ ⎞+
− = −⎜ ⎟⎝ ⎠
(4.62)
da qual se obtém a temperatura máxima como 2 2
max 2 2
316
q L Hk H L
θ′′′
=+
(4.63)
A máxima diferença de temperatura aumenta proporcionalmente com a razão /q k′′′ e com o
quadrado do menor dos dois lados. A fórmula (4.63) aproxima-se da solução exata quando a
seção transversal é plana ( ) ou H L H L>> << . Ela é menos precisa no caso de uma seção
quadrada, quando ela superestima a máxima diferença de temperatura em cerca de 27 %.
4.4.2 Método de análise de escala
O primeiro termo na equação (4.57) representa a curvatura da distribuição de
temperatura na direção x. A curvatura representa a mudança na inclinação /T x∂ ∂ , a ordem
de grandeza derivada segunda pode ser avaliada como
2/ 2 0
2 / 2 0x L x
T TT x x
x L= =
∂ ∂⎛ ⎞ ⎛ ⎞−⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠∂ −
∼ (4.64)
O símbolo ∼ significa da mesma ordem de grandeza. Por simetria, ( ) 0/ 0
xT x
=∂ ∂ = . O
gradiente de temperatura deve ser proporcional à diferença máxima de temperatura; desta
forma,
max
/ 2 / 2x L
Tx L
θ
=
∂⎛ ⎞ −⎜ ⎟∂⎝ ⎠∼ (4.65)
e conseqüentemente,

92
( )
2max
22 / 2T
x Lθ∂
−∂
∼ (4.66)
Por um argumento semelhante pode-se concluir que
( )
2max
22 / 2T
y Hθ∂
−∂
∼ (4.67)
Substituindo (4.66) e (4.67) em (4.57) resultará
( ) ( )max max
2 2/ 2 / 2qkL H
θ θ ′′′+ ∼ (4.68)
da qual se obtém a diferença máxima de temperatura como 2 2
max 2 24q L Hk L H
θ′′′
+∼ (4.69)
A análise de escala levou a um resultado que é cerca de 33 % maior do que o resultado
da análise integral (Eq. (4.63)). A análise de escala produz um resultado compacto e barato
que concorda com a solução exata dentro de um fator de grandeza de ordem 1 com a solução
exata do problema.
4.4.3 Método gráfico
O método gráfico é ilustrado na Figura 4.1. Suponha o caso de uma região retangular
com as faces esquerda e direita isoladas termicamente. Suponha que o topo esteja numa
temperatura mais alta do que o fundo. As linhas horizontais serão linhas isotérmicas, normais
a estas linhas têm-se as linhas de fluxo, que serão as linhas verticais. A taxa total de calor que
entra na parede superior é suposta ser composta de n mini-correntes de igual dimensão, cada
obtida como
( )1,2, ,iqq i nn
= = … (4.70)
Cada mini-corrente escoa através de um tubo de calor, isto é, o espaço entre duas linhas de
fluxo adjacentes.
93
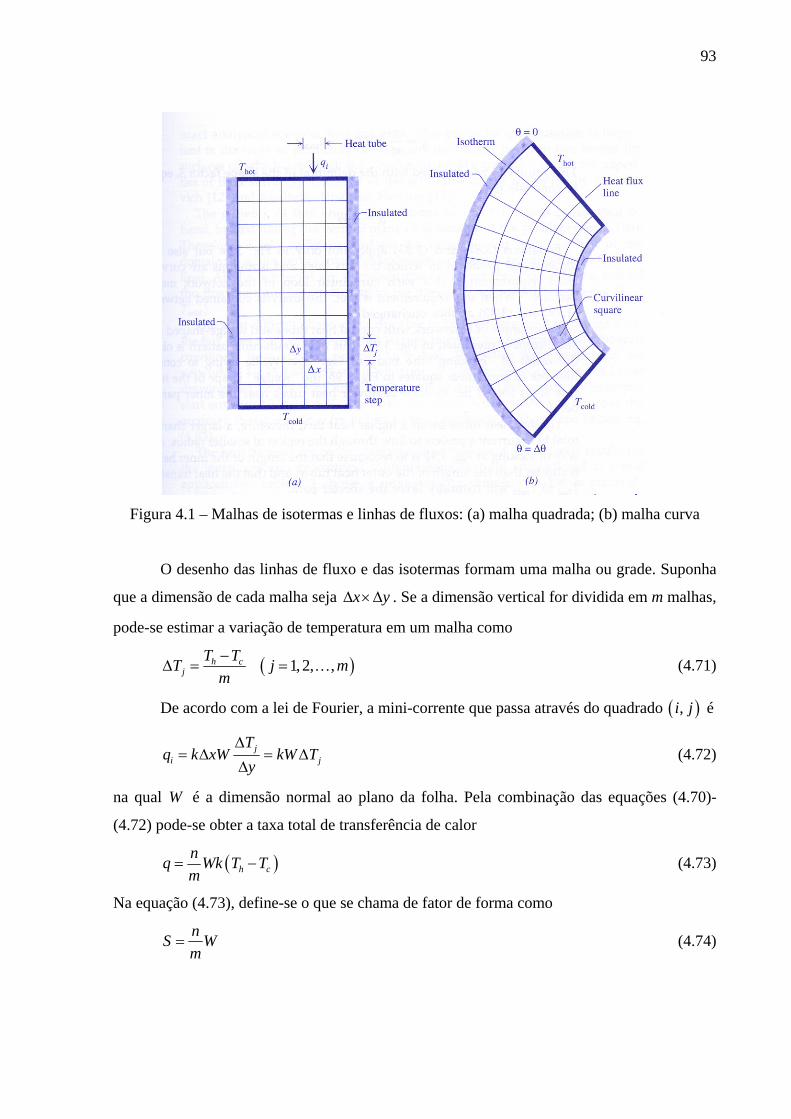
Figura 4.1 – Malhas de isotermas e linhas de fluxos: (a) malha quadrada; (b) malha curva
O desenho das linhas de fluxo e das isotermas formam uma malha ou grade. Suponha
que a dimensão de cada malha seja x yΔ ×Δ . Se a dimensão vertical for dividida em m malhas,
pode-se estimar a variação de temperatura em um malha como
( )1,2, ,h cj
T TT j mm−
Δ = = … (4.71)
De acordo com a lei de Fourier, a mini-corrente que passa através do quadrado ( ),i j é
ji j
Tq k xW kW T
yΔ
= Δ = ΔΔ
(4.72)
na qual W é a dimensão normal ao plano da folha. Pela combinação das equações (4.70)-
(4.72) pode-se obter a taxa total de transferência de calor
( )h cnq Wk T Tm
= − (4.73)
Na equação (4.73), define-se o que se chama de fator de forma como
nS Wm
= (4.74)
94
Este procedimento que resultou na Eq. (4.73) se aplica mesmo no caso das linhas
isotermas e de fluxo serem curvas. Existem nos livros de transferência de calor fatores de
forma para várias configurações.
4.3 Métodos numéricos
Atualmente, com o desenvolvimento e maior disponibilização de computadores, os
métodos mais comumente usados para se resolver a equação de condução multidimensional
são métodos numéricos, em que um meio continuo é substituído por subdomínios que formam
uma malha ou conjunto de pontos. Os pontos são nós (nódulos) na intersecção das linhas da
malha ou grade. Em condução de calor, o método numérico mais comumente usado é o
método de diferença finita. Com o uso de métodos numéricos, muitas das simplificações para
se obter soluções analíticas não necessitam serem feitas.
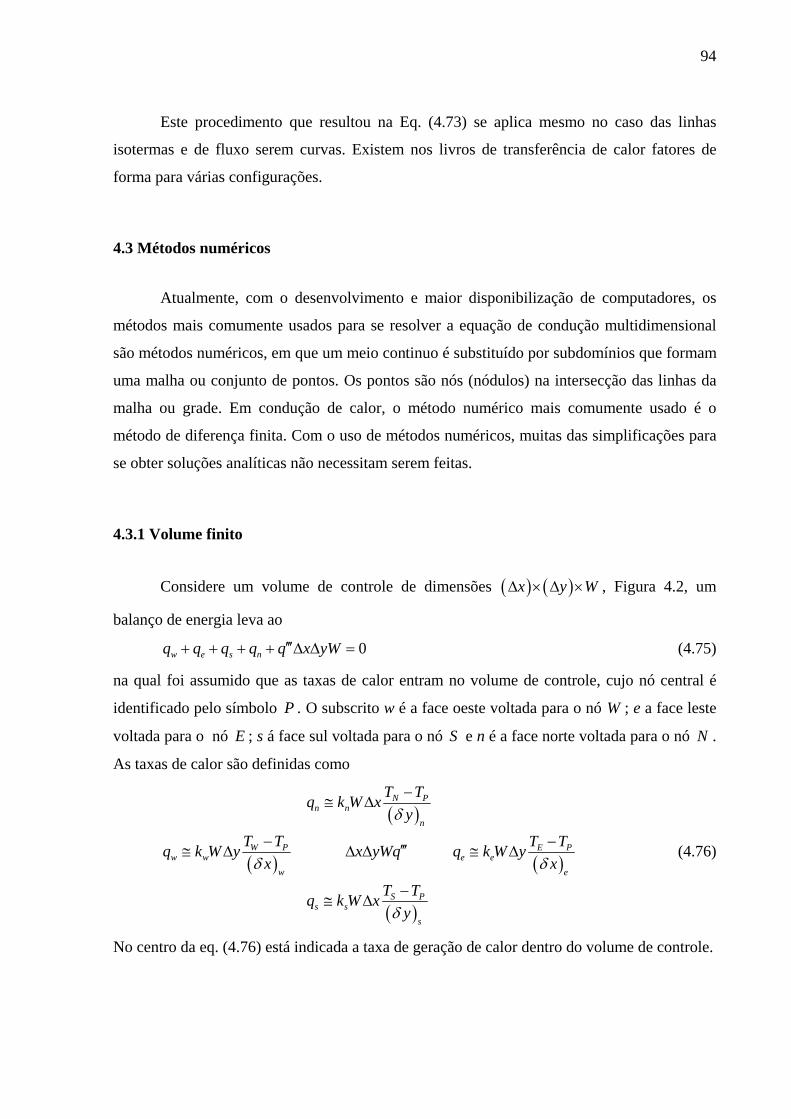
4.3.1 Volume finito
Considere um volume de controle de dimensões ( ) ( )x y WΔ × Δ × , Figura 4.2, um
balanço de energia leva ao
0w e s nq q q q q x yW′′′+ + + + Δ Δ = (4.75)
na qual foi assumido que as taxas de calor entram no volume de controle, cujo nó central é
identificado pelo símbolo P . O subscrito w é a face oeste voltada para o nó W ; e a face leste
voltada para o nó E ; s á face sul voltada para o nó S e n é a face norte voltada para o nó N .
As taxas de calor são definidas como
( )
( ) ( )
( )
N Pn n
n
W P E Pw w e e
w e
S Ps s
s
T Tq k W xy
T T T Tq k W y x yWq q k W yx x
T Tq k W xy
δ
δ δ
δ
−≅ Δ
− −′′′≅ Δ Δ Δ ≅ Δ
−≅ Δ
(4.76)
No centro da eq. (4.76) está indicada a taxa de geração de calor dentro do volume de controle.
95
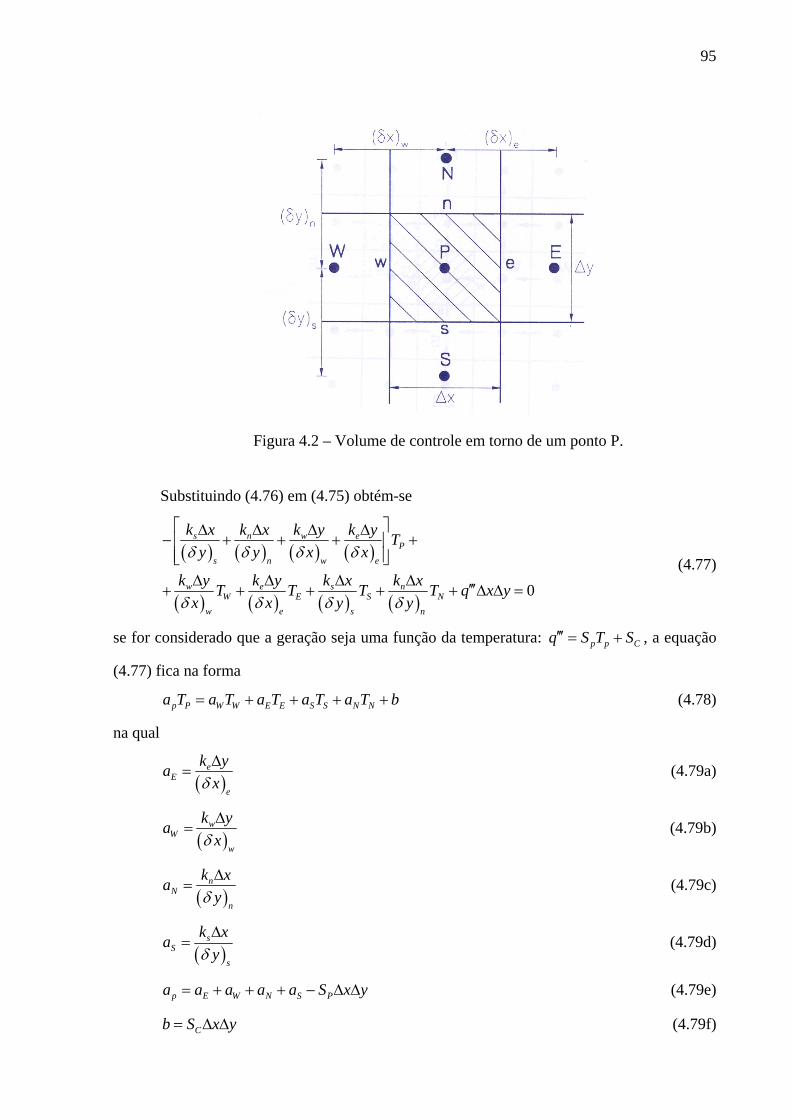
Figura 4.2 – Volume de controle em torno de um ponto P.
Substituindo (4.76) em (4.75) obtém-se
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )0
s n w eP
s n w e
w e s nW E S N
w e s n
k x k x k y k y Ty y x x
k y k y k x k xT T T T q x yx x y y
δ δ δ δ
δ δ δ δ
⎡ ⎤Δ Δ Δ Δ− + + + +⎢ ⎥⎢ ⎥⎣ ⎦
Δ Δ Δ Δ ′′′+ + + + + Δ Δ =
(4.77)
se for considerado que a geração seja uma função da temperatura: p p Cq S T S′′′ = + , a equação
(4.77) fica na forma
p P W W E E S S N Na T a T a T a T a T b= + + + + (4.78)
na qual
( )e
Ee
k yaxδΔ
= (4.79a)
( )w
Ww
k yaxδΔ
= (4.79b)
( )n
Nn
k xayδΔ
= (4.79c)
( )s
Ss
k xayδΔ
= (4.79d)
p E W N S Pa a a a a S x y= + + + − Δ Δ (4.79e)
Cb S x y= Δ Δ (4.79f)

96
A equação (4.78) se escrita numa forma matricial sugere um arranjo pentadiagonal,
que pode ser resolvida por técnicas numéricas bem conhecidas.
No caso de um problema tridimensional, a coordenada z também será discretizada e
existirão fluxos nas faces t (topo) e b (fundo), equação (4.78) e os coeficientes ficam na forma
p P W W E E S S N N T T B Ba T a T a T a T a T a T a T b= + + + + + + (4.80)
na qual
( )e
Ee
k y zaxδ
Δ Δ= (4.81a)
( )w
Ww
k y zaxδΔ Δ
= (4.81b)
( )n
Nn
k x zayδΔ Δ
= (4.81c)
( )s
Ss
k x zayδ
Δ Δ= (4.81d)
( )t
Tt
k x yazδ
Δ Δ= (4.81e)
( )b
Bb
k x yazδ
Δ Δ= (4.81f)
p E W N S T B Pa a a a a a a S x y z= + + + + + − Δ Δ Δ (4.81g)
Cb S x y z= Δ Δ Δ (4.81h)
No caso de problemas tridimensionais, a equação (4.80) sugere um arranjo
heptadiagonal.
4.3.2 Diferença finita
No caso em que se usa o método clássico de diferenças finitas pode-se ter as três
seguintes aproximações para o gradiente de temperatura num ponto ,i j , Figura 4.3,
( ) ( )1, 1,2
T i j T i jT Tx x x
+ − −∂ Δ≈ =
∂ Δ Δ (4.82a)
( ) ( ), 1,T i j T i jT Tx x x
− −∂ Δ≈ =
∂ Δ Δ (4.82b)

97
( ) ( )1, ,T i j T i jT Tx x x
+ −∂ Δ≈ =
∂ Δ Δ (4.82c)
Figura 4.3 – Nomenclatura para discretização por diferença finita.
As equações (4.82a), (4.82b) e (4.82c) são conhecidos como diferenças centrais,
diferenças para trás e diferenças para frente respectivamente. Derivadas segundas podem ser
aproximadas como
( ) ( ) ( ) ( )( )
( ) ( ) ( )( )
2
2
1, , , 1,
1, 2 , 1, =
k T i j T i j T i j T i jTkx x x
k T i j T i j T i j
x
⎡ ⎤+ − − + −∂ ∂⎛ ⎞ ⎣ ⎦≈ =⎜ ⎟∂ ∂⎝ ⎠ Δ
⎡ ⎤+ − + −⎣ ⎦Δ
(4.83)
Analogamente, tem-se
( ) ( ) ( ) ( )( )
( ) ( ) ( )( )
2
2
, 1 , , , 1
, 1 2 , , 1 =
k T i j T i j T i j T i jTky y y
k T i j T i j T i j
y
⎡ ⎤+ − − + −⎛ ⎞∂ ∂ ⎣ ⎦≈ =⎜ ⎟∂ ∂ Δ⎝ ⎠
⎡ ⎤+ − + −⎣ ⎦Δ
(4.84)
Desta forma a equação de condução em regime permanente discretizada em diferenças
finitas fica na forma
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )2 2 2 2 2 2
, 1 1, 2 , 2 , 1, , 10
T i j T i j T i j T i j T i j T i j qky x x y x y
− − + + ′′′+ − − + + + =
Δ Δ Δ Δ Δ Δ (4.85)
que numa forma mais compacta fica como
, 1 1, , 1, , 1 ,i j i j i j i j i j i jaT bT cT bT aT d− − + ++ + + + = (4.86)
na qual

98
( )21ay
= −Δ
(4.87a)
( )21bx
= −Δ
(4.87b)
( ) ( )2 22 2cx y
= +Δ Δ
(4.87c)
,i jqdk′′′
= (4.87d)
4.3.3 Elemento finito
O método de elementos finitos, ilustrado na Figura 4.4, também tem sido usado para
se resolver a equação de condução, devido sua versatilidade para discretizção de domínios
complexos
( ) 0k T q′′′∇ ∇ + =i (4.88)
Multiplicando a equação (4.88) por uma função de ponderação W e integrando no domínio de
um elemento, após uma integração por partes obtém-se
0
0e e
e e e
e e e
W k Td Wq d
W k Td Wk T nd Wq d
TW k Td Wk d Wq dn
Ω Ω
Ω Γ Ω
Ω Γ Ω
′′′∇ ∇ Ω+ Ω =
′′′− ∇ ∇ Ω+ ∇ Γ+ Ω =
∂ ′′′∇ ∇ Ω = Γ + Ω∂
∫ ∫∫ ∫ ∫
∫ ∫ ∫
i
i i
i
(4.89)
Agora, interpola-se a temperatura dentro de um elemento na forma:
{ }eT N T= (4.90)
na qual
1
2
T
Ne
NN
N
N
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
; { }1
2e
Ne
TT
T
T
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
(4.91a, b)
em que iN e iT são funções de interpolação conhecidas e associadas ao nó i de um elemento e
os valores nodais da temperatura respectivamente num elemento. Tomando caso do método
de Galerkin, em que

99
W N= (4.92)
e substituindo (4.90) e (4.92) em (4.89) resultará
{ } { } { } { }e e e
e TN k N d T N k d N q dnΩ Γ Ω
∂ ′′′∇ ∇ Ω = Γ + Ω∂∫ ∫ ∫i (4.93)
Figura 4.4 – Malhas de elementos finitos: (a) elementos triangulares; (b) elementos
quadrilaterais.
A equação (4.93) pode ser escrita numa forma matricial como
{ } { }e e eK T Q⎡ ⎤ =⎣ ⎦ (4.94)
No caso de um problema bidimensional os elementos da matriz eK⎡ ⎤⎣ ⎦ e do vetor fonte são
definidos por
ije
j je i iN NN NK k dxdyx x y yΩ
∂ ∂⎛ ⎞∂ ∂= +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠∫ (4.95)
e e
ei i i
TQ N k d N q dxdynΓ Ω
∂ ′′′= Γ +∂∫ ∫ (4.96)

100
O primeiro termo do lado direito da Eq. (4.96) será avaliado somente nos elementos
que tenha um contorno coincidindo com o contorno externo do domínio com fluxo de calor
especificado. Se o domínio for discretizado em um número de elementos Nelem, considerando
a contribuição de todos os elementos, resultará a forma matricial,
[ ]{ } { }K T Q= (4.97)
na qual, agora, a matriz [ ]K e o vetor { }Q conterão a contribuição de todos os elementos:
[ ]1
Neleme
eK K
=
⎡ ⎤= ⎣ ⎦∑ ; { } { }1
Neleme
eQ Q
=
= ∑ (4.98)
O vetor { }T conterá as temperaturas de todos os pontos do domínio.
A solução da equação (4.97) é feita após introdução dos valores conhecidos de
temperatura em alguma parte do contorno do domínio, por técnicas numéricas apropriadas
para solução de sistemas lineares esparsos.
No caso de condução num meio anisotrópico, a equação de condução ficaria na forma:
0iji j
Tk qx x⎛ ⎞∂ ∂ ′′′+ =⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
(4.99)
Em tal caso, a matriz eK⎡ ⎤⎣ ⎦ será definida na forma para um problema tridimensional:
11 12 22
13 23
33
e
e
N N N NN N N Nk k kx x x y y x y y
N N N NN N N NK k k dxdydzx z z x y z z y
NNkz z
αβ
β β β βα α α α
β β β βα α α α
βα
Ω
⎡ ⎤∂ ∂ ∂ ∂⎛ ⎞∂ ∂ ∂ ∂+ + + +⎢ ⎥⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎢ ⎥
⎢ ⎥∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂⎢ ⎥= + + + + +⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥⎝ ⎠ ⎝ ⎠⎢ ⎥∂∂⎢ ⎥+⎢ ⎥∂ ∂⎣ ⎦
∫ (4.100)
O vetor do termo fonte ficará na forma
11 12 13 1
21 22 23 2
31 32 33 3
e e
e
T T Tk k k nx y z
T T TQ N k k k n d N q dxdydzx y z
T T Tk k k nx y z
α α αΓ Ω
⎡ ⎤⎛ ⎞∂ ∂ ∂+ + +⎢ ⎥⎜ ⎟∂ ∂ ∂⎝ ⎠⎢ ⎥
⎢ ⎥⎛ ⎞∂ ∂ ∂⎢ ⎥ ′′′= + + + + Γ +⎜ ⎟∂ ∂ ∂⎢ ⎥⎝ ⎠⎢ ⎥⎛ ⎞∂ ∂ ∂⎢ ⎥+ + +⎜ ⎟⎢ ⎥∂ ∂ ∂⎝ ⎠⎣ ⎦
∫ ∫ (4.101)
Portanto, pode-se ver a vantagem de usar o método de elementos finitos neste
problema mais complexo.
101
4.4 Resolução das Equações Geradas pelo Método de Diferenças Finitas
Qualquer que seja o método numérico empregado para solução de uma equação
diferencial parcial, o resultado final é a obtenção de um sistema algébrico de equações que
pode ser escrito na seguinte forma genérica:
AT B= (4.102)
na qual A é a matriz de coeficientes que depende da geometria, das propriedades do material,
etc. T é o vetor de incógnitas das temperaturas em pontos do domínio que depende do
método de discretização. B é o vetor de termos fontes, etc.
Existem vários métodos de solução: diretos e iterativos que podem ser encontrados na
literatura.
4.4.1 Método de Inversão de Matriz
Trata-se de um método direto, mas nem sempre pode ser aplicado, por exemplo,
quando a matriz A depende de T , o que torna o problema não linear. Em essência o método
consiste em multiplicar pela esquerda a Eq. (4.102) pela inversa de A , ou seja, por 1A− 1 1 1 1A AT A B IT A B T A B− − − −= ⇔ = ⇔ = (4.103)
A solução para T pode também ser escrita na forma:
T C= (4.104)
em que 1C A B−= (4.105)
4.4.2 Método de Iterativo de Gauss-Seidel
11 1
1 11 2 3
i n( k ) ( k ) ( k ) ( k )
i i i ij j ij j iij j i
Dado T fazer T T ( b a T a T ) / a , k , , ,....−
− −
= = += + − − =∑ ∑o (4.106).
Nesta equação o termo
11
1 1
i n( k ) ( k )
ij j ij jj j i
a T a T−
−
= = ++∑ ∑ (4.107).
pode ser simplesmente implementado como
1 1 11 2 1 1
1
n( k ) (k) ( k ) ( k ) ( k ) ( k ) ( k ) ( k )
ij j i i n nj
ˆ ˆa T , onde T (T ,T T ,T T ,T )− − −− −
==∑ T (4.108)

102
Portanto, basta manter o vetor T atualizado e utilizar esta informação assim que se torne
disponível. Abaixo apresenta-se o algoritmo baseado na equação (4.106)
Algoritmo - Método iterativo de Gauss-Seidel Escolha um vetor inicial T(0), aproximante de T Defina o número máximo de iterações, iMax for k = 1:iMax T(k-1) = T(k) for i = 1:n Calcule o resíduo: r(k)(i) = b(i) – A(i,:)T(k)(:) T(k)(i) = T(k-1)(i) + r(i)/A(i,i) end for Calcule ||r(k)|| Calcule ||T(k) – T(k-1)|| Teste o critério de convergência, continue se necessário end for