bauhaus university weimar, chair of computing in civil ... · pdf file1 distributed adaptive...
TRANSCRIPT

1
Distributed adaptive diagnosis of sensor faults using structural response data
Kosmas Dragos* and Kay Smarsly
Bauhaus University Weimar, Chair of Computing in Civil Engineering, Coudraystr. 7,
99423 Weimar, Germany
Email: [email protected]
Keywords: Structural health monitoring; Wireless sensor networks, Fault diagnosis;
Nonlinearity; Distributed systems; Analytical redundancy
Abstract
The reliability and consistency of wireless structural health monitoring systems can be
compromised by sensor faults, leading to miscalibrations, corrupted data, or even data loss.
Several research approaches towards fault diagnosis, referred to as “analytical
redundancy”, have been proposed that analyze the correlations between different sensor
outputs. In wireless structural health monitoring (SHM), most analytical redundancy
approaches require centralized data storage on a server for data analysis, while other
approaches exploit the on-board computing capabilities of wireless sensor nodes, analyzing
the raw sensor data directly on board. However, using raw sensor data poses an operational
constraint due to the limited power resources of wireless sensor nodes. In this paper, a new
distributed autonomous approach towards sensor fault diagnosis based on processed
structural response data is presented. The inherent correlations among Fourier amplitudes
of acceleration response data, at peaks corresponding to the eigenfrequencies of the
structure, are used for diagnosis of abnormal sensor outputs at a given structural condition.
Representing an entirely data-driven analytical redundancy approach that does not require
any a priori knowledge of the monitored structure or of the SHM system, artificial neural
networks (ANN) are embedded into the sensor nodes enabling cooperative fault diagnosis
in a fully decentralized manner. The distributed analytical redundancy approach is

2
implemented into a wireless SHM system and validated in laboratory experiments,
demonstrating the ability of wireless sensor nodes to self-diagnose sensor faults accurately
and efficiently with minimal data traffic. Besides enabling distributed autonomous fault
diagnosis, the embedded ANNs are able to adapt to the actual condition of the structure,
thus ensuring accurate and efficient fault diagnosis even in case of structural changes.
1. Introduction
Civil engineering structures are exposed to various external impacts, leading to ageing and
structural degradation. To ensure structural integrity, structural health monitoring systems
are deployed for assessing the condition of civil engineering structures. Structural health
monitoring (SHM) is a structural assessment method that uses data obtained by sensors
installed in the structure to detect abnormal changes in the structural condition. In the field
of SHM, wireless sensor networks have attracted significant attention due to the labor-
efficient and cost-effective installation of wireless sensor nodes. Moreover, exploiting the
collocation of processing power with sensing modules, embedded computing is
increasingly utilized to perform a variety of SHM tasks (Dragos & Smarsly, 2015). For
example, in the field of damage detection, Lynch et al. (2004) have proposed
autoregressive models with exogenous inputs (AR-ARX). The use of multi-threaded
software for the execution of simultaneous monitoring tasks on-board the sensor nodes has
been proposed by Wang et al. (2007). A model updating algorithm based on the principles
of simulated annealing has been presented by Zimmerman and Lynch (2007). Zimmerman
et al. (2008) have proposed embedded software to implement several output-only system
identification methods, while Cho et al. (2008) have introduced an embedded computing
approach for calculating cable forces of cable-stayed bridges. Wang et al. (2006) and Kane

3
et al. (2014) have implemented linear quadratic regulation algorithms using various sensor
nodes. Dragos and Smarsly (2015a, b) have presented an embedded modeling approach for
decentralized condition assessment of civil engineering structures. Smarsly and Law
(2013) have presented a resource-efficient approach towards distributed networking in
wireless SHM systems, based on the real-time assembling of powerful software agents that
migrate to the wireless sensor nodes in order to analyze potential anomalies on demand.
To ensure reliable and consistent monitoring, wireless SHM systems must operate
dependably and accurately. However, the dependability and accuracy of wireless sensor
networks can be affected by sensor faults that may be caused, e.g., by malfunctioning
hardware, radio interference, harsh weather conditions, or environmental impacts. A sensor
fault can be defined as a defect of a sensor that leads to an error, and an error is the
manifestation of a fault that may result in the failure of the SHM system. Failures are
visible in the sensor output and vary according to the type of sensor fault. Fault types can
be classified in five categories: bias, drift, complete failure, gain, and precision degradation
(Qin and Li, 1999; Kullaa, 2010). Bias is the deviation by a constant value between sensor
output and actual structural output. Drift is the incrementing deviation between sensor
outputs and actual structural outputs. In case of complete failure, the sensor outputs consist
of a constant or noise regardless of changes in the actual structural output. Gain is the
scaling of the sensor outputs by a constant, while in precision degradation the sensor
outputs are contaminated with a white noise function. To avoid miscalibrations, corrupted
data and even data loss during monitoring, sensor faults must be accurately and efficiently
diagnosed in real time.
Fault diagnosis, in general, includes the following tasks (Patton 1990), where this study
4
focuses particular attention on the first two tasks:
Fault detection: Recognizes an adverse operation of the system
Fault isolation: Discriminates the exact location of the fault
Fault identification: Determines the type (or nature) of the fault
Fault accommodation: Compensates for the effects of the fault
Lots of research has been conducted since the middle of the last century in the field of fault
diagnosis (Moore and Channon, 1956; von Neumann, 1956; Willsky, 1976). Particularly in
the past 30 years, a number of fault diagnosis techniques have been developed that are
based on mathematical models (Isermann, 1984; Frank, 1990; Patton et al, 2000). First and
foremost, mathematics and computer science has provided the foundation for fault
diagnosis in many engineering disciplines, such as avionics (Hitt and Mulcare, 2001) or
mechanical engineering (Benedettini et al., 2009). Classical approaches towards fault
diagnosis are limit or trend checking of sensor outputs. In addition, model-based methods
(e.g., based on parameter estimation, parity equations, or state observers) are increasingly
applied that, using dynamic process models, advantageously use both sensor inputs and
sensor outputs (Isermann, 2005).
In SHM, fault diagnosis is typically based on analyses of residuals between expected and
actual sensor outputs, which are usually structural response data, e.g. acceleration response
data (Smarsly and Petryna, 2014). Since structural response is governed by the geometrical
and mechanical properties of the structure, there is inherent correlation among the outputs
of sensors installed at different locations in the structure (Kraemer and Fritzen, 2007).
Therefore, fault diagnosis through the correlation between sensor outputs can be derived

5
either from installing redundant sensors, whose outputs are compared to the outputs of
existing sensors (“physical redundancy”), or from exploiting the redundant information
contained in the output of existing sensors (“analytical redundancy”). The type of models
used to derive this correlation depends on the level of knowledge of the structure. If the
properties of a structure are known, physics-based models, for example finite element
models, can be used in combination with data from neighboring sensor nodes to calculate
expected outputs of a sensor. Without a priori knowledge, analytical redundancy can be
implemented on wireless sensor nodes based on purely data-driven models, such as
artificial neural networks (ANNs). ANNs are a class of algorithms that are inspired by
biological nervous systems (e.g. the human brain). Using parallel computing principles,
ANNs are able to solve tasks that can hardly be solved through deterministic algorithms,
and can therefore be applied to approximate nonlinear problems, including sensor fault
diagnosis (Smarsly, 2014).
Several approaches towards sensor fault detection based on ANNs have been proposed.
For example, Venkatasubramanian et al. (1990) have tested various neural network
topologies for detecting process failures, such as sensor faults. Obst (2009) has presented a
distributed recurrent neural network with local communication to detect sensor faults.
Basirat and Khan (2009) have introduced a neural network approach to distinguish faulty
sensor data from non-faulty sensor data. Yuen & Lam (2006) have presented a method to
develop ANN designs for damage detection in structural health monitoring. Smarsly &
Law (2014) have proposed the use of ANNs for sensor fault detection in SHM systems by
utilizing the analytical redundancy in the correlations between sensor outputs, mapping the
characteristics of the structure as well as the correlations of the installed sensors.
Specifically, expected sensor outputs, representing non-faulty sensor operation, are

6
computed for each sensor and compared to the actual sensor outputs, the residuals being
used for indicating sensor faults.
Most fault diagnosis approaches in SHM require data transmission to a centralized server,
on which the data is analyzed with respect to sensor faults. In wireless SHM systems,
wireless transmission has proven to be particularly power consuming; hence, several
embedded computing approaches have been proposed based on on-board data processing
algorithms designed to reduce the data traffic (Lei et al., 2010). Embedded algorithms have
also been used to enhance the decentralization of sensor fault diagnosis. However, using
raw sensor outputs in the time domain for fault diagnosis still causes considerable data
traffic. Little attention has been paid to exploiting on-board data processing explicitly to
reduce the data traffic required for decentralized fault diagnosis (Jahr et al., 2015).
In this paper, a distributed approach towards autonomous sensor fault diagnosis is
presented based on a methodology using the correlation among processed structural
response data collected from different sensors. More precisely, acceleration response data
is processed on board the sensor nodes, via the fast Fourier transform. Fault detection is
then based on the inherent correlation between the Fourier amplitudes of peaks indicative
of resonant response (at the eigenfrequencies of the structure) at a given structural
condition, while fault isolation is implicit in the methodology because single (isolated)
sensors are observed. The expected amplitudes of the sensor nodes are predicted by ANNs.
Residuals between expected and actual amplitudes (from the transformed acceleration
response data) are indicative of sensor faults, which are autonomously detected and
isolated by the wireless sensor nodes in a fully decentralized manner. The methodology is
implemented into a prototype wireless SHM system and validated through laboratory tests

7
on a frame structure. The ANN properties, case-specifically depending on the monitored
structure, are determined based on performance and prediction accuracy criteria. The
laboratory tests are devised to validate the accuracy and efficiency of the distributed
analytical redundancy approach and the ability of the ANNs to adapt to changes in the
structural condition.
The remainder of this paper is organized in three sections: First, the methodology for the
proposed fault diagnosis approach is described, the mathematical background is
illuminated, and the implementation into a fault-tolerant wireless SHM system is
presented. Second, validation tests of the fault diagnosis approach are presented. Finally,
the proposed approach is discussed, and an outlook on potential future research is
provided.
2. Methodology for distributed autonomous fault diagnosis in wireless SHM systems
The sensor fault diagnosis approach is based on the correlations among acceleration
response data transformed from the time domain into the frequency domain, which is
represented in terms of amplitudes and frequencies. Using the amplitudes of correlated
sensor nodes at non-faulty sensor operation, the expected amplitudes of each sensor node
at the eigenfrequencies of the structure are predicted and compared to the actual
amplitudes. In this section, the mathematical background of the proposed methodology is
presented, followed by the design principles developed for the implementation of the
methodology into a fault-tolerant wireless SHM system prototype.

8
2.1 Signal processing
Signal processing is a common analysis tool employed in several engineering disciplines,
such as acoustics and structural dynamics, which investigate periodic mathematical
functions (Smith, 1999). Structural response data is collected in the form of signals. The
methods employed for processing the signals are categorized into two groups: time domain
methods and frequency domain methods. Time domain methods are applied directly on the
signal, which has typically the form of data points sampled at a specified time step.
Frequency domain methods analyze the signal with respect to the frequency content and
express the signal in terms of frequencies and amplitudes, e.g. using the fast Fourier
transform (FFT) (Cooley and Tukey, 1965). Frequency domain methods provide insights
into the frequency content of the signal, from which helpful conclusions can be drawn in
several applications of signal processing. Therefore, it is common to perform preliminary
frequency domain analysis even if time domain methods are selected for signal processing.
2.1.1 Correlation among Fourier amplitudes
In signal processing, spectral density represents the amount of energy carried by a signal.
Considering a continuous function f(t), the spectral density S is defined as
dttfS2
(1)
Assuming that the Fourier transform of signal f(t) exists, and according to Parseval’s
theorem, the relationship between the spectral density and the FT is obtained as follows.

9
222lim FSdFdttfT
E
(2)
In Eq. 2, E denotes the expected value and ω is the natural frequency expressed in rad/s.
From Eq. 2, Eq. 3 shows the relation between the spectral density function and the
correlation function at a given time lag.
RdeRdtetfetfS iT
T
titi
T
Elim (3)
In Eq. 3, R(ω) is the autocorrelation function of signal f(t) and τ is the time lag, while the
overbar denotes complex conjugate. From the equations given above, it can be concluded
that the spectral density is directly related to the autocorrelation of a signal. It is reasonable
to assume that Eq. 3 holds for any pair of signals f(t) and g(t). For two different signals, the
cross spectral density is related to the cross correlation function between the two signals.
Figure 1 illustrates the relationship between the correlation function of two different
signals of acceleration response data sets. Alternatively, the spectral density function is
calculated from Eq. 4 by first obtaining the Fourier spectra of signals f(t) and g(t), as
shown in Figure 2.
GFSdtetgGdtetfF titi 22 (4)

10
Figure 1. Spectral density function derived from the correlation function of two structural
response data sets
Figure 2. Spectral density function derived from the Fourier transforms of structural
response data sets

11
It is obvious that the obtained spectral density function is identical in both cases.
Therefore, it can be concluded that the existing correlation between the two acceleration
response data sets can be extended into the corresponding frequency spectra of the
acceleration response data sets. In some system identification methods, this correlation
among modal peaks is used for the extraction of structural mode shapes (e.g. Brincker et
al., 2000). Another conclusion drawn from Figure 1 and Figure 2 is that the correlation
between the two data sets is stronger at the highest peak of the frequency spectrum, which
typically corresponds to the fundamental eigenfrequency of the structure.
2.1.2 Non-linear relationship among Fourier amplitudes
Drawing from the theory of structural dynamics, the ratios between the elements of each
mode shape vector are constant regardless of the excitation, therefore the Fourier
amplitudes at peaks corresponding to mode shapes are linearly interconnected to each
other. While such an assumption is valid for theoretical approaches, in practice, due to
several measurement factors, the linearity of the aforementioned relationship between the
Fourier amplitudes is usually compromised. Two measurement factors that compromise
the accuracy of the response data sets, and therefore the linear relationship among Fourier
amplitudes, are the quantization error and the noise floor of the sensor (Olney and
Morgenthal, 2015).
If the bandwidth or the amplitude of the excitation is limited, the Fourier peaks correspond
to an “operating deflection shape” (ODS), i.e. the deflection of the structure at particular
frequencies (Richardson and McHargue, 1993). The ODS of a structure depends on the
excitation and may approximate the mode shape of the structure; however, the relationship

12
between the Fourier amplitudes of an ODS collected from different sensors is not constant.
As shown in Figure 3, for an arbitrary structure subjected to N different excitation
scenarios, the relationships between the Fourier amplitudes Ak,n (k = 1,2,…,i,…,j+2 and
n = 1,2,..,N) of the responses at different locations deviates considerably from linearity.
Figure 3. Relationships between Fourier amplitudes of structural responses at different
locations of the structure for N excitation scenarios
2.2 Correlation of Fourier amplitudes for fault diagnosis
Sensor fault types, as mentioned previously, can be classified into five categories: bias,
drift, complete failure, gain, and precision degradation. The fault types are illustrated in
Figure 4.

13
Figure 4. Basic fault types
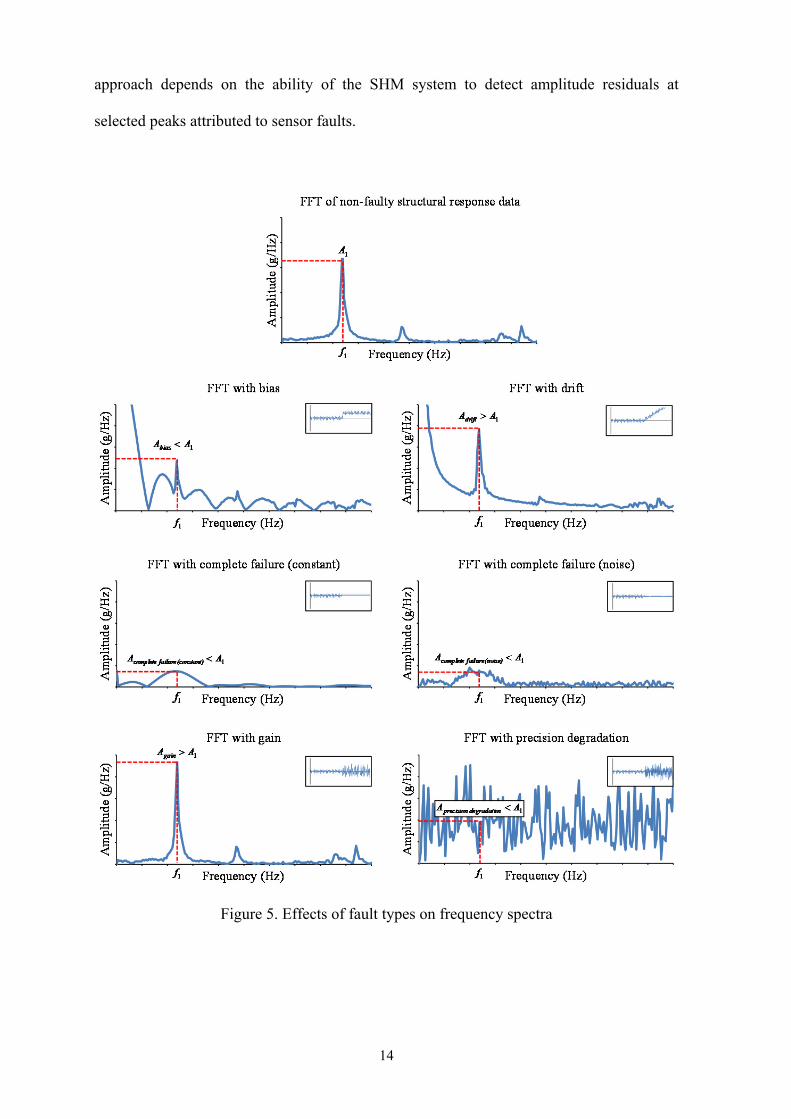
In general, all fault types have an effect on the frequency spectrum. Figure 5 shows how
the frequency spectrum of a response data set is affected if the faults shown in Figure 4
occur. While the impact of each fault on the general shape of the spectrum is obvious, it
should be noted that the dependability and accuracy of the fault diagnosis approach
described in this paper depends on the effect of the fault on the amplitudes of the selected
peaks. It is not uncommon that sensor faults introduce spurious components into the
frequency spectrum and contaminate the overall frequency content of the signal. However,
if the effect on the amplitude at the selected peaks is low, the difference between the
expected (i.e. predicted) Fourier amplitude and the actual Fourier amplitude could be small
and the fault could be therefore undetectable. Hence, the efficiency of the fault diagnosis
btftf ˆ
Bias
Sens
or o
utpu
t
Time
btf ˆ
(constant) failure Complete
Sens
or o
utpu
t
Time
0,ˆ
Gain Rbtfbtf
Sens
or o
utpu
t
Time
tbtftf ˆ
Drift
Sen
sor
outp
ut
Time
2,0~,ˆ
(noise)failureComplete
Ntwtwtf
Sens
or o
utpu
t
Time
2,0~,ˆ
ndegradatioPrecision
Ntwtwtftf
Sen
sor
outp
ut
Time
14
approach depends on the ability of the SHM system to detect amplitude residuals at
selected peaks attributed to sensor faults.
Figure 5. Effects of fault types on frequency spectra

15
2.3 Implementation of the fault diagnosis methodology
The distributed analytical redundancy approach is implemented into a fault-tolerant
wireless SHM system prototype. The SHM system is composed of (i) wireless sensor
nodes installed in the monitored structure, (ii) a base station, and (iii) a server with data
storage and data analysis capabilities. The prototype SHM system supports the following
monitoring tasks, as shown in Figure 6: 1) data acquisition, 2) data processing, 3) fault
diagnosis, 4) data transmission, 5) data storage, and 6) data analysis. Data acquisition and
data processing are performed on-board the sensor nodes by transforming the acceleration
response data of the structure from the time domain into the frequency domain using a
Cooley-Tukey fast Fourier transform algorithm. A peak detection algorithm is executed to
identify the highest peak and the corresponding frequency (fundamental eigenfrequency of
the structure). Fault diagnosis is performed by the wireless sensor nodes in a distributed-
collaborative manner. The results of the fault diagnosis are wirelessly communicated
through the base station to the host computer for decision making. The data is eventually
analyzed, using various software tools on the host computer.
Figure 6. Monitoring tasks supported by the fault-tolerant wireless SHM system

16
2.3.1 Distributed adaptive fault diagnosis
The following discussion focuses on the “fault diagnosis” monitoring task and the
embedded software designed for distributed autonomous fault diagnosis. Representing a
distinct advantage of the analytical redundancy approach, no prior knowledge about the
characteristics of the monitored structure is required for performing fault diagnosis,
because an entirely data-driven approach is proposed. To this end, machine learning
algorithms that implement ANNs (Fiesler and Beale, 1997) are employed for the prediction
of the expected Fourier amplitudes of the sensor nodes, taken as the basis for fault
diagnosis.
The ANNs embedded into each sensor node comprise several neurons structured in three
layers (Figure 7). Figure 7 shows the topology of an ANN embedded into sensor node j. In
the input layer of the ANN, the actual Fourier amplitudes of k correlated sensor nodes of
the wireless SHM system are entered upon wireless receipt from the adjacent sensor nodes
1…k (“inputs”). The output layer contains one neuron that predicts the expected Fourier
amplitude of sensor node j (“output”). To account for the nonlinear relationship between
the inputs and the output, drawing from ANN theory, the hidden layer of m neurons is
devised to link the input layer with the output layer. The connections between the neurons,
the “synapses”, are used for data exchange between the neurons. The training of the ANNs
is achieved by adjusting the weights of the synapses until a set of input Fourier amplitudes,
taken from training data obtained in preliminary laboratory tests, results in the desired
Fourier amplitude of sensor node j. Finally, the properties of the ANN are determined.
ANN properties essentially encompass the network topology (such as the number of
neurons per layer) and the neuron behavior (such as the functions used to link the output of

17
one neuron to the input of the subsequent neuron).
Figure 7. Artificial neural network embedded into sensor node j
The size of the implemented ANN needs to be kept as small as possible to preserve the
limited computational resources of the sensor nodes. Hence, in each ANN only a limited
number of sensor nodes are considered. In large SHM systems, the sensor nodes are
divided in clusters, and one ANN is implemented in each cluster, thus maintaining a
reduced size for the ANNs.
2.3.2 Embedded software architecture
To implement the fault diagnosis methodology, software is written in Java programming
language, exploiting the merits of object-orientation and platform independence. The
software consists of two packages, the sensornode package (executed on the sensor
nodes) and the basestation package (executed on the host computer). Every package
includes several Java classes, used as “blueprints”, from which individual Java objects are
created, representing the real-world objects relevant to SHM.

18
As illustrated in the class diagram shown in Figure 8, the package sensornode contains
Java classes designed for data acquisition, data processing, fault diagnosis (i.e. training and
operating the ANNs), and data communication (AccelerationSampler, FFT,
Sample, NetworkTraining, Communication, and MainNode). In addition,
several classes are imported into the package from an external library, the SNIPE library,
that supports the implementation of artificial neural networks (Kriesel, 2010). The entry
point of the overall SHM application, which starts the operation of the sensor nodes, is the
startApp() method in the MainNode class. In the MainNode class, instances of the
AccelerationSampler class, of the FFT class, of the NetworkTraining class, of
the Communication class, and of the SNIPE neural network classes are created to
autonomously perform the monitoring tasks, including fault diagnosis. Specifically, the
AccelerationSampler class is designed for measuring the acceleration of the
monitored structure. The measured values are stored in an array on the sensor nodes. The
FFT class performs an FFT according to the Cooley-Tukey algorithm to transform the
measured accelerations from the time domain into the frequency domain, followed by a
peak detection algorithm to provide insights into potential structural changes. The
information relevant to fault diagnosis, i.e. the Fourier amplitudes and the
eigenfrequencies, is packaged in the Sample class. The Sample class, in addition to the
amplitudes and the eigenfrequencies, also includes the address of the specific sensor node
as well as a Boolean value that indicates a sensor fault.
The basestation package, illustrated in Figure 9, handles the tasks of the host
computer; it includes the classes DatabaseHandler, MainBase, and Sample. The
MainBase class is designed to manage radio connections between the base station and the
sensor nodes; it also receives data sent by the sensor nodes and communicates with objects

19
of the DatabaseHandler class. The DatabaseHandler class establishes a
connection to a MySQL database installed on the host computer, automatically creates
database tables and inserts the data relevant to fault diagnosis, i.e. the results of the fault
diagnosis from each sensor node, into the database.
Figure 8. Class diagram of package “sensornode”
Figure 9. Class diagram of package “basestation”
3 Validation tests
Validation tests are devised to showcase the ability of the proposed approach to diagnose
sensor faults reliably and accurately as well as to demonstrate the adaptability of the
approach to changes in the structural condition. First, the properties of the ANN are

20
defined. Then, the fault diagnosis approach is applied and validated for two structural
conditions, initial and changed.
3.1 Hardware used
The sensor nodes and the base station used in this study are of type “Oracle Sun SPOT”
(Oracle Corp., 2009, 2010). Each sensor node includes a main board, a battery, and an
exchangeable application board. The outer dimensions of each sensor node are
41 mm × 70 mm × 23 mm (length × width × height), and the weight of each sensor node is
54 g. The main board features a Java-programmable 400 MHz ARM main processor, 1 MB
RAM, 8 MB flash memory and an IEEE 802.15.4 radio transceiver. The application board
includes a digital output accelerometer, an ambient light sensor, a temperature sensor, and
eight tricolor LEDs. The integrated accelerometer is of type MMA7455L with a selectable
measurement range between ± 2 g and ± 8 g.
3.2 Experimental setup
The wireless SHM system implemented to validate the proposed fault diagnosis approach
is installed on a test structure. The test structure is a 4-story frame structure consisting of
steel plates of 25 cm × 50 cm × 0.8 mm (length × width × thickness). The plates rest on steel
threaded rods with a story height of 23 cm. At the bottom of the structure, the rods are
fixed into a solid block of 40 cm × 60 cm × 30 cm. Figure 10 shows the instrumentation of
the test structure. The base station is connected to a server placed next to the structure.
Since this approach is based on output-only data processing techniques, the excitation of
the structure is performed by deflecting the top story from the equilibrium position without

21
measuring the excitation force.
Figure 10. Laboratory test set-up
3.3 Determination of the artificial neural network properties
The determination of suitable ANN properties is conducted in preliminary laboratory tests
that are executed prior to the actual validation tests. Since the ANNs embedded into the
sensor nodes are able to adapt to the condition of the monitored structure (i.e. on the
laboratory test structure), the ANN properties for the fault diagnosis approach are case-
specific, thus depending on the characteristics of the monitored structure and on the SHM
system setup. Different topologies and different neuron behaviors are implemented for test
purposes. The criteria employed for the definition of the ANN properties are related to the
performance of the ANN, i.e. the time needed to produce the output, and to the prediction
accuracy, i.e. the residuals between the expected Fourier amplitude and the actual Fourier
500.0
±0.00
+230
+460
+690
+920
-300
Elevationview
450.0
D1
D3
D2
Plan view
250.0
45.0
27.0
M5 steel threaded rodwith nut and washer
Steel plate(500x250x0.8)
M5 threadedplug (socket)
M5 planted part of M5steel rod (varies fordifferent columns)
M5 nut
M5 washer
4.50.7
Detail D1
Detail D2
Detail D3

22
amplitude.
The prediction accuracy is expressed through the root mean square errors εRMS between the
expected Fourier amplitude (Fexpected) and the actual Fourier amplitude (Factual) at the
fundamental eigenfrequency (ω1), calculated and averaged for all iterations (N), as shown
in Eq. 5.
N
FFN
iiactual,iexpected,
RMS
1
21
21
(5)
Using the test setup shown in Figure 10, data of three correlated sensor nodes is deployed
to feed the ANN of one sensor node; hence, each ANN has three input neurons and,
reflecting the expected Fourier amplitude to be predicted, one output neuron is required.
Between the input layers and the output layer, various numbers of hidden layers as well as
various hidden neurons per layer are tested. Interlayer connections, allowing only synapses
between neurons in adjacent layers, as well as supralayer connections, allowing synapses
between neurons in distant layers, are considered. As for the neuron behaviors, two
different training algorithms, the backpropagation algorithm and the resilient
backpropagation algorithm are tested (Rumelhart et al. 1986, Riedmiller & Braun 1993).
By exciting the test structure, a total of 100 acceleration response data sets is collected and
transformed into the frequency domain by the sensor nodes. The Fourier amplitude
corresponding to the fundamental eigenfrequency of the structure is computed on board the
sensor nodes, and both values (amplitude and frequency) are transmitted, through the base
station, to the database for storage. Following the general practice of neural network

23
applications, each data set is divided into three subsets, a training set, a validation set, and
a test set, which allows stopping the training process as soon as overfitting starts to occur.
The training set is used for adjusting the weights of the ANNs. The validation set is used to
monitor the training process, i.e., when the network begins to overfit the data, the error on
the validation set typically begins to rise. Thus, the network weights are saved at the
minimum error. The test set, being independent from the training set and the validation set,
is used to test the final solution to confirm the predictive power of the ANNs.
The results of the determination of the ANN properties are summarized in Table 1. In
general, all ANN topologies and neuron behaviors tested are capable of predicting Fourier
amplitudes for fault detection. The smallest root mean square errors, representing the best
results and thus the best prediction accuracy, are obtained with interlayer-connected
topologies and backpropagation (0.063 ≤ εRMS ≤ 0.144). Using topologies with supralayer
connections or the resilient backpropagation training algorithm leads to root mean square
errors between 0.132 and 0.208. Considering a reasonable trade-off based on the
performance criterion and the prediction accuracy criterion, a 3-2-1 interlayer-connected
ANN topology with backpropagation is determined to be ideal for the test structure used in
this study, thus being embedded into each sensor node for the validation tests.

24
Table 1. Prediction accuracy of the wireless SHM system
Neuron behavior Topology Neurons per sensor node
Computing time (s)
εRMS (-)
Interlayer, backpropagation
3-1 4 6.6 0.149 3-2-1 6 13.0 0.096 3-3-1 7 17.2 0.144 3-5-1 9 25.0 0.081 3-7-1 11 32.2 0.063 3-2-2-1 8 21.0 0.092 3-5-5-1 14 46.6 0.137
Interlayer and supralayer, backpropagation
3-3-1 7 15.2 0.147 3-5-1 9 22.6 0.132 3-2-2-1 8 19.4 0.137
Interlayer, resilient backpropagation
3-3-1 7 113.0 0.153 3-5-1 9 172.4 0.143 3-2-2-1 8 120.6 0.208
3.4 Operation of the SHM system
Implementing the ANNs with the previously determined properties into the fault-tolerant
wireless SHM system prototype, two validation tests are performed to validate the
efficiency and accuracy of the fault diagnosis approach. In the first validation test, sensor
faults are simulated to be detected by the SHM system. Since the embedded ANNs are
capable of adapting to the condition of the monitored structure, the second validation test is
devised to showcase the ability of the fault-tolerant SHM system to adapt to changes in the
condition of the monitored structure. Therefore, in the second validation test, the structural
condition is changed by introducing damage, and the same sensor faults as in the first test
are simulated to be detected once the SHM system has adapted to the changed condition.
3.4.1 Fault diagnosis at initial structural condition
The first validation test (test 1) is performed in the initial, i.e. undamaged, condition of the

25
structure. The simulation of two of the most common fault types, gain and complete
failure, is exemplarily shown in the following. Fixation issues, not uncommon in structural
health monitoring, are the most frequent sources of gain. Faulty sensors with gain are often
found to have sustained a partial loss of connectivity to the structure, which results in loss
of sensor orientation and in scaling of the collected response data. In this study, gain is
simulated by rotating the sensor node by an angle of 45o (Figure 11). Furthermore,
complete failure is manifested through either a constant value or noise in the sensor output
instead of the actual response. In this study, complete failure is simulated by substituting
the sensor outputs with random values.
A total of 30 acceleration response data sets, each containing 1024 data points, is collected.
Similar to the procedure towards determining the optimum ANN properties, fault diagnosis
is performed based on the root mean square error between the expected and actual Fourier
amplitudes, as shown in Eq. 5, which reflects the prediction accuracy of the approach.
Figure 11. Simulation of bias sensor fault type at sensor node B

26
To validate the distributed autonomous fault diagnosis, the test structure is excited by
deflecting the top story from the equilibrium position and by letting the structure to vibrate
freely. Upon collecting a preliminary response data set, the peak detection algorithm
embedded in each sensor node is executed to verify that the eigenfrequency used for
training of the ANNs has not been changed (i.e. no structural change has occurred). Once
the 30 response data sets are collected, the embedded ANN of sensor node B predicts the
expected Fourier amplitude of the sensor node using the Fourier amplitudes requested from
sensor nodes A, C, and D as input data. The actual Fourier amplitude of sensor node B is
computed via the embedded FFT algorithm. The residuals between the expected Fourier
amplitude and the actual Fourier amplitude are calculated and averaged over the 30 data
sets to extract the root mean square error. The fault detection is realized by comparing the
residuals to a fault threshold with εRMS < indicating non-faulty sensor operation. The
fault threshold is defined using the results from the test above as benchmarks and set to
τ = 0.15 derived from good engineering judgment. The results for both simulated sensor
fault types are summarized in Table 2.
Table 2. Distributed autonomous detection of sensor faults.
Root mean square error No fault Simulated fault
Gain Complete failureεRMS 0.102 0.264 0.372
As can be seen from Table 2, if no fault occurs in the SHM system, the root mean square
error is εRMS = 0.102 corresponding to the test set of the data set . A root mean square error
εRMS = 0.264 corresponds to the simulated gain fault, while in the case of complete failure,
the respective root mean square error is εRMS = 0.372. The increased values of εRMS indicate
the presence of faults as well as the efficient detection of sensor faults. Figure 12 shows

27
how the amplitudes of the peaks corresponding to the fundamental eigenfrequency are
affected by the faults considered in this study.
Figure 12. Comparison of frequency spectra between non-faulty operation (left), bias fault
(middle), and precision degradation fault (right).
3.4.2 Fault diagnosis at changed structural condition
An important ability of the analytical redundancy approach is to adapt to changes in the
structural condition. Hence, the second validation test is conducted after damage is
introduced to the structure, considering a change in the structural condition affecting the
simulated sensor faults. The damage is introduced by loosening the column-to-plate
connections on one side of the structure, as shown in Figure 13.
050
100150200250
0 20 40
Am
plitu
de (
g/H
z)
Frequency (Hz)
FFT with non-faulty response data
050
100150200250
0 20 40A
mpl
itude
(g/
Hz)
Frequency (Hz)
FFT with gain
050
100150200250
0 20 40
Am
plit
ude
(g/H
z)
Frequency (Hz)
FFT with complete failure (noise)

28
Figure 13. Damage introduced to the test structure
The same fault types as in the validation test 1 are considered. The structure is deflected at
the top story and left to vibrate freely. A preliminary response data set is collected and the
peak detection algorithm is executed to investigate whether a change in the frequency of
the highest peak has occurred; structural changes are followed by a shift of the peaks in the
Fourier spectrum, and once this shift is identified by the SHM system, a beacon signal is
sent to the server to request the retraining of the ANNs. Upon completion of the ANN
retraining (adaptation), 30 response data sets are collected and the same procedure as in
validation test 1 is followed. The expected Fourier amplitude of node B is predicted by the
ANN using the amplitudes of nodes A, C, and D as input data. The actual amplitude of
node B is then computed by the embedded FFT algorithm and the residual between the
expected and actual Fourier amplitudes is calculated and averaged for the 30 data sets,
being adapted to the changed (damaged) structural condition.

29
4. Summary and conclusions
Efficient and accurate sensor fault diagnosis is paramount for ensuring the reliability and
consistency of structural health monitoring (SHM) systems. To date, most fault diagnosis
approaches are based on the centralized storage of data on a server, where the data is
analyzed in order to detect and isolate sensor faults. However, centralized fault diagnosis
requires considerable data transfer, which in the case of wireless SHM systems is highly
power consuming. Approaches towards decentralized fault diagnosis for wireless SHM
system may eliminate the need for centralized collection of data, but the embedded
algorithms used rely on the wireless communication of raw data, thus still posing a non-
negligible operational constraint due to the limited power resources of wireless sensor
nodes. The exploitation of the embedded computing capabilities of wireless sensor nodes
in terms of on-board data processing for fault diagnosis has received little attention. In this
paper, a distributed approach towards autonomous fault diagnosis has been presented using
the concept of analytical redundancy. Abnormal sensor outputs are detected based on the
inherent correlations among the Fourier amplitudes of structural response data from
different sensors at peaks corresponding to the eigenfrequencies of the structure. The
approach proposed in this study is entirely data-driven requiring no a priori knowledge of
the structure or of the SHM system. Fault diagnosis is performed by calculating the
deviation between the actual Fourier amplitudes of measured acceleration response data
and the expected Fourier amplitudes predicted from the sensor outputs of correlated sensor
nodes. The expected Fourier amplitudes of each sensor node are predicted by embedded
artificial neural networks taking into account the actual condition of the monitored
structure. By communicating only the Fourier amplitude at selected peaks, fault diagnosis
is performed with minimal data traffic, thus preserving the limited power resources of

30
wireless sensor nodes.
The distributed analytical redundancy approach has been validated through laboratory tests
on a 4-story frame structure. The fault diagnosis methodology has been implemented into a
wireless SHM system, which has been installed on the frame structure. Suitable properties,
i.e. topology and neuron behavior, of the ANN for implementing the proposed approach
into the laboratory test structure have been determined based on the performance and the
prediction accuracy of the ANN output. Based on the aforementioned criteria, a 3-2-1
ANN topology (3 input layers, 2 hidden layers, one output layer) and backpropagation
neuron behavior has been identified as the ideal topology for the wireless SHM system
employed in the present study. The selected ANN topology has been embedded into the
sensor nodes, and two validation tests have been performed. Test 1 has been conducted in
the initial structural condition with non-faulty sensors, while test 2 has been conducted
with faulty sensors and after inducing structural changes (i.e. damage). The results of the
validation tests clearly demonstrate the ability of the proposed approach to diagnose sensor
faults efficiently and accurately, as well as the ability of the ANNs to adapt to structural
changes. It is clear that the efficiency and accuracy of the fault diagnosis depends on the
impact of the fault on the amplitudes of the selected peaks of the Fourier spectrum.
Therefore, future research will focus on investigating the applicability limits of the
proposed approach with respect to different sensor fault types, which have different impact
on the frequency content of the structural response.
Acknowledgements
The authors would like to gratefully acknowledge the support offered by the German

31
Research Foundation (DFG) under grant GRK 1462 (“Evaluation of Coupled Numerical
and Experimental Partial Models in Structural Engineering”). The financial support is
gratefully acknowledged. The authors would like to extend their gratitude to Mrs. Katrin
Jahr, who has developed parts of this work at the Chair of Computing in Civil Engineering
at Bauhaus University Weimar. Any opinions, findings, conclusions or recommendations
expressed in this paper are those of the authors and do not necessarily reflect the views of
DFG.
References
Basirat, A. H. and Khan, A. I. (2009). “Graph neuron and hierarchical graph neuron, novel
approaches toward real time pattern recognition in wireless sensor networks”. In: Proc. of
the 2009 International Conference on Wireless Communications and Mobile Computing.
Leipzig, Germany, 21/06/2009.
Benedettini, O., Baines, T. S., Lightfoot, H. and Greenough, R. M. (2009). “State-of-the-
art in integrated vehicle health management”. Journal of Aerospace Engineering, Vol. 223,
No. 2, pp. 157-170.
Bisby, L. A. (2014). “An introduction to structural health monitoring”. ISIS Educational
Module 5, Queen’s University ,Toronto, ON, Canada, 2014.
Brincker, R., Andersen, P. and Zhang, L. (2000). “Modal identification from ambient
responses using frequency domain decomposition”. In: Proc. of the 18th International
Modal Analysis Conference (IMAC), San Antonio, TX, USA, 07/02/2000.

32
Cho, S., Yun, C. B., Lynch, J. P., Zimmerman, A., Spencer, Jr. B. and Nagayama, T.
(2008). “Smart wireless sensor technology for structural health monitoring”. Steel
Structures, Vol. 8, No. 4, pp. 267-275.
Cooley, J. W. and Tukey, J. W. (1965). “An algorithm for the machine calculation of
complex Fourier series”. Mathematics of Computation, Vol. 19, No. 90, pp. 297-301.
Doebling, S., Farrar, C., Prime, M. and Shevitz, D. (1996). “Damage identification and
health monitoring of structural and mechanical systems from changes in their vibration
characteristics: a literature review”. Technical report No: LA-13070-MS, Los Alamos
National Lab., NM, USA, 1996.
Dragos, K. and Smarsly, K. (2015). “A comparative review of wireless sensor nodes for
structural health monitoring”. In: Proc. of the 7th International Conference on Structural
Health Monitoring of Intelligent Infrastructure. Turin, Italy, 01/07/2015.
Frank, P. M. (1990). “Fault diagnosis in dynamic systems using analytical and knowledge-
based redundancy”. Automatica, Vol. 26, pp. 459-474.
Fiesler, E. and Beale, R. (1997). “Handbook of neural computation”. Oxford University
Press, Oxford, UK, 1997.
Hitt, E. F. and Mulcare, D. (2001). “Fault-Tolerant Avionics”. The Avionics Handbook, C.
R. Spitzer (eds.), Taylor & Francis Group, London, UK, 2001.
Isermann, R. (2005). “Model-based fault-detection and diagnosis – status and

33
applications”. Annual Reviews in Control, Vol. 29, No. 1, pp. 71-85.
Isermann, R. (1984). “Process fault-detection based on modelling and estimation methods
– a survey”. Automatica, Vol. 20, pp. 387-404.
Jahr, K., Schlich, R., Dragos, K. and Smarsly, K. (2015). “Decentralized autonomous fault
detection in wireless structural health monitoring systems using structural response data”.
In Proc. of the 20th International Conference on the Applications of Computer Science and
Mathematics in Architecture and Civil Engineering (IKM). Weimar, Germany, 22/07/2015.
Kane, M., Zhu, D., Hirose, M., Dong, X., Winter, B., Häckel, M., Lynch, J. P., Wang, Y.
and Swartz, A. (2014). “Development of an extensible dual-core wireless sensing node for
cyber-physical systems”. In: Proc. of SPIE, Sensors and Smart Structures Technologies for
Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 09/03/2014.
Kraemer, P. and Fritzen, C.-P. (2007). “Sensor Fault Identification Using Autoregressive
Models and the Mutual Information Concept”. Key Engineering Materials, Vol. 347, pp.
387-392.
Kriesel, D. (2007). “A brief introduction to neural networks”. Available at:
http://www.dkriesel.com.
Kullaa, J. (2010). “Detection, identification, and quantification of sensor fault”. In: Proc.
of 24th International Conference on Noise and Vibration engineering (ISMA2010),
Leuven, Belgium, 20/09/2010.
Lei, Y., Shen, W. A., Song, Y. and Wang, Y. (2010). “Intelligent wireless sensors with
application to the identification of structural modal parameters and steel cable forces: from
the lab to the field”. Advances in Civil Engineering, Vol. 2010, pp.1-10.

34
Lynch, J. P., Sundararajan, A., Law, K. H., Sohn, H. and Farrar, C. R. (2004). “Design of a
wireless active sensing unit for structural health monitoring”. In: Proc. of SPIE’s 11th
Annual Int. Symposium on Smart Structures and Materials, San Diego, CA, USA,
14/03/2004.
Mehrotra, K., Mohan, C. K. and Ranka, S. (1997). “Elements of artificial neural
networks”. MIT press, Cambridge, MA, USA, 1997.
Moore, E. F. and Shannon, C. E. (1956). “Reliable circuits using less reliable relays”.
Journal of the Franklin Institute, Vol. 262, No. 3, pp. 191-208.
Obst, O. (2009). “Distributed fault detection using a recurrent neural network”. In:
Proceedings of the 2009 International Conference on Information Processing in Sensor
Networks. Washington, DC, USA, 13/04/2009.
Olney, P. and Morgenthal, G. (2015). “Simulating sensor attributes to quantify the utility
of monitoring systems”. In: Proc. of the 7th International Conference on Structural Health
Monitoring of Intelligent Infrastructure, Turin, Italy, 01/07/2015.
Oracle Corp. (2009). “Sun SPOT Theory of Operation, 1.5.0”. Sun Labs, Santa Clara, CA,
USA, 2009.
Oracle Corp. (2010). “Sun SPOT eDEMO Technical Datasheet, 8th edition”. Sun Labs,
Santa Clara, CA, USA, 2010.

35
Qin, S. J. and Li, W. (1999). “Detection, identification, and reconstruction of faulty sensors
with maximized sensitivity”. Journal of American Institute of Chemical Engineers, Vol.
45, No. 9, pp. 1963-1976.
Richardson, M. H. and McHargue, P. L. (1993). “Operating deflection shapes from time
versus frequency domain measurements”. In: Proc. of IMAC-XI, International Modal
Analysis Conference and Exposition. Kissimmee, Orlando, FL, USA, 01/02/1993.
Patton, R. J. (1990). “Fault detection and diagnosis in aerospace systems using analytical
redundancy”. In: Proc. of the IEE Colloquium Condition Monitoring and Fault Tolerance.
London, UK, 11/06/1990.
Patton, R. J., Frank, P. M. and Clark, P. N. (2000). “Issues of fault diagnosis for dynamic
systems”. Springer Publishing, Berlin, Germany, 2000.
Rajakarunakaran, S., Venkumar, P., Devaraj, D. and Rao, K. (2008). “Artificial neural
network approach for fault detection in rotary system”. Applied Soft Computing, Vol. 8,
No. 1, pp. 740-748.
Riedmiller, M. and Braun, H. (1993). “A direct adaptive method for faster backpropagation
learning: The RPROP algorithm”. In: Proc. of the IEEE International Conference on
Neural Networks, San Francisco, CA, 28/03/1993.
Rumelhart, D. E., Hinton, G. E. and Williams, R. J. (1986). “Learning representations by
back-propagating errors”. Nature, Vol. 323, pp. 533-536.

36
Salawu, O.S. (1997). “Detection of structural damage through changes in frequency: a
review”. Engineering structures, Vol. 19, No. 9, pp. 718-723.
Smarsly, K. (2014). “Fault diagnosis of wireless structural health monitoring systems
based on online learning neural approximators”. In: Proc. of the International Scientific
Conference of the Moscow State University of Civil Engineering (MGSU). Moscow,
Russia, 11/12/2014.
Smarsly, K. and Law, K. H. (2013). “A migration-based approach towards resource-
efficient wireless structural health monitoring”. Advanced Engineering Informatics, Vol.
27, No. 4, pp. 625-635.
Smarsly, K. and Petryna, Y. (2014). “A Decentralized Approach towards Autonomous
Fault Detection in Wireless Structural Health Monitoring Systems”. In: Proc. of the 7th
European Workshop on Structural Health Monitoring. Nantes, France, 08/07/2014.
Smarsly, K. and Law, K. H. (2014). “Decentralized fault detection and isolation in wireless
structural health monitoring systems using analytical redundancy”. Advances in
Engineering Software, Vol. 73, pp. 1-10.
Smith, S. W. (1999). “The Scientist and Engineer's Guide to Digital Signal Processing
(second edition)”. California Technical Publishing, San Diego, CA, USA, 1999.
Venkatasubramanian, V., Vaidyanathan, R. and Yamamoto, Y. (1990). “Process fault
detection and diagnosis using neural networks – 1. Steady-state processes”. Computers &
Chemical Engineering, Vol. 14, No. 7, pp. 699-712.
Von Neumann, J. (1956). “Probabilistic logics and the synthesis of reliable organisms from
unreliable components”. Automata Studies, Princeton, NJ, USA, Shannon, C. E.,

37
McCarthy, J., pp. 329-378.
Wang, Y., Lynch, J. P. and Law, K. H. (2007). “A wireless structural health monitoring
system with multithreaded sensing devices: Design and validation”. Structure and
Infrastructure Engineering, Vol. 3, No. 2, pp. 103-120.
Willsky, A. S. (1976). “A survey of design methods for failure detection systems”.
Automatica, Vol. 12, pp. 601-611.
Yuen, K.-V. and Lam, H.-F. (2006). “On the complexity of artificial neural networks for
smart structures monitoring”. Engineering Structures, Vol. 28, No. 7, pp. 977-984.
Zimmerman, A., Shiraishi, M., Schwartz, A. and Lynch, J. P. (2008). “Automated modal
parameter estimation by parallel processing within wireless monitoring systems”. ASCE
Journal of Infrastructure Systems, Vol. 14, No. 1, pp. 102-113.