autoware: ros-based oss for urban self-driving mobility 2017 autoware.pdf · ros-based oss for...
TRANSCRIPT

AutowareROS-based OSS for Urban Self-driving Mobility
Shinpei KatoAssociate Professor, The University of Tokyo
Visiting Associate Professor, Nagoya University
Founder and CTO, Tier IV Inc.
https://github.com/CPFL/Autoware




Velodyne HDL-64e (3D LiDAR)
Point Grey Ladybug 5 (Camera)
IBEO LUX 8L (3D LiDAR)
Velodyne HDL-32e (3D LiDAR)
JAVAD RTK-GNSS (GNSS/GPS)
Point Grey Grasshopper3 (Camera)
Velodyne VLP-16 (3D LiDAR)

TorqueSensor
Gas PedalPositionSensor
ShiftPositionSensor
BrakeStrokeSensor
OilPressureSensor
…
Emergency Button
EPSECU Hybrid ECU
Skid ControlECU
OtherECUs
Control Box Status Monitor
CAN0CAN1
CAN I/F
OBDIIConnector
Direct signals to ECUs
bypassing CAN.
Computing Unit
Reconnected wires.
Car interior monitors.
Accessories.
CAN
Cameras3D LiDARs GNSS/GPS

NVIDIA DRIVE PX2


Aisan Technology’s Minivan (ZMP RoboCar)

Public road demonstration

Yamaha Motor’s Golf Cart

Yamaha Motor’s Baggy


31 miles along the El Camino Real in
the Bay Area along 140 traffic signals
and crosswalks during regular traffic
over a period of an hour-and-a-half.

Sensing Computing
Detection
Localization
Prediction
Perception
Decision
Planning
Motion
Mission
Intelligence State
LiDARs
Cameras
IMU
GPS
Actuation
YMC
ZMP
TMC
AS
Data Socket System Util

points_localizer
{lidar0,1,2,…}/points_raw
points_concat
dead_rekoner gnss_localizer
gnss_pose
map_manager
points_map_region points_map_updatedruntime_manager
static_pose
nmea_sentence
delta_poselocalizer_velocity
can_velocity imu_raw
current_pose
vel_pose_
connector current_velocity
Packages Example (Localization)
points_filtered
tf
manual_posetf

Aisan Technology (Partner Company)


High-Definition 3D Mapping

High-Definition 3D Mapping



3D map data Sensor scan data
Matching
Localization
Normal Transform Distributions (NDT) for Localization


Normal Transform Distributions (NDT) for Mapping


Euclidean Clustering for Detection

Convolutional Neural Networks (CNN) for Detection

Convolutional Neural Networks (CNN) for Detection
SSD Yolo2

Convolutional Neural Networks (CNN) for Detection
Depth Image
Height Image
Intensity Image
CNN Segments

Camera-LiDAR Calibration and Sensor Fusion
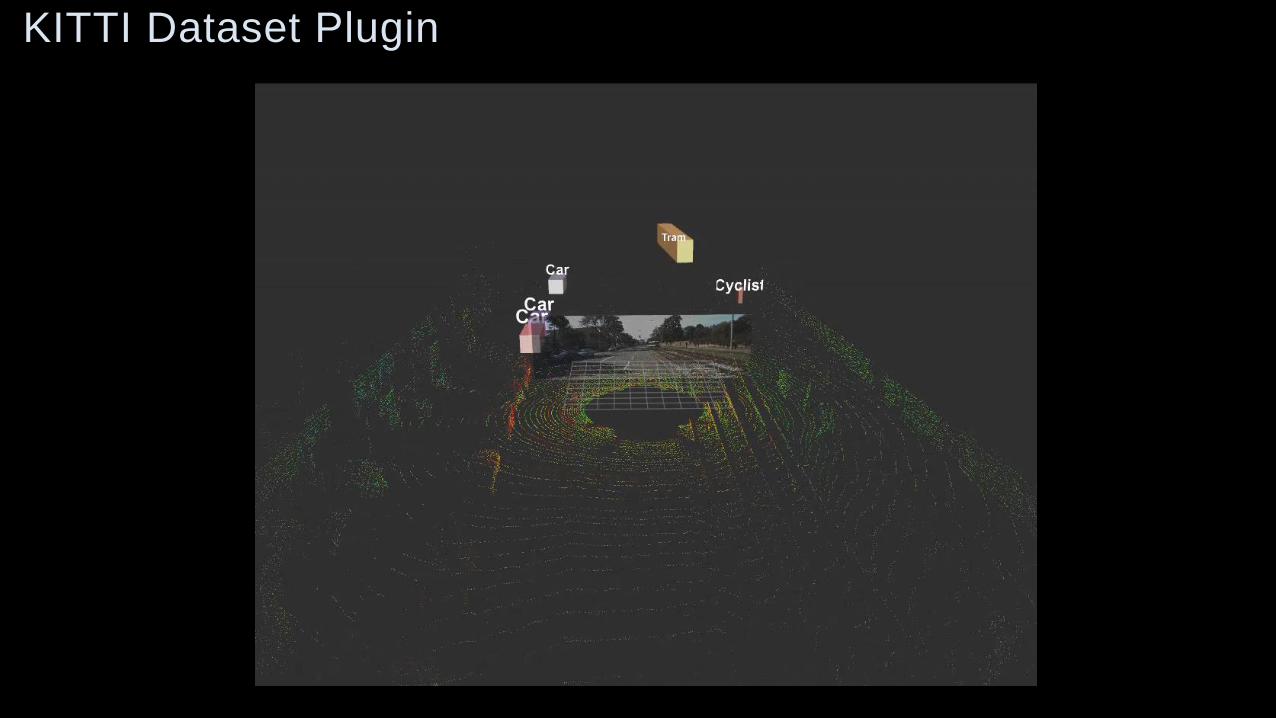
KITTI Dataset Plugin
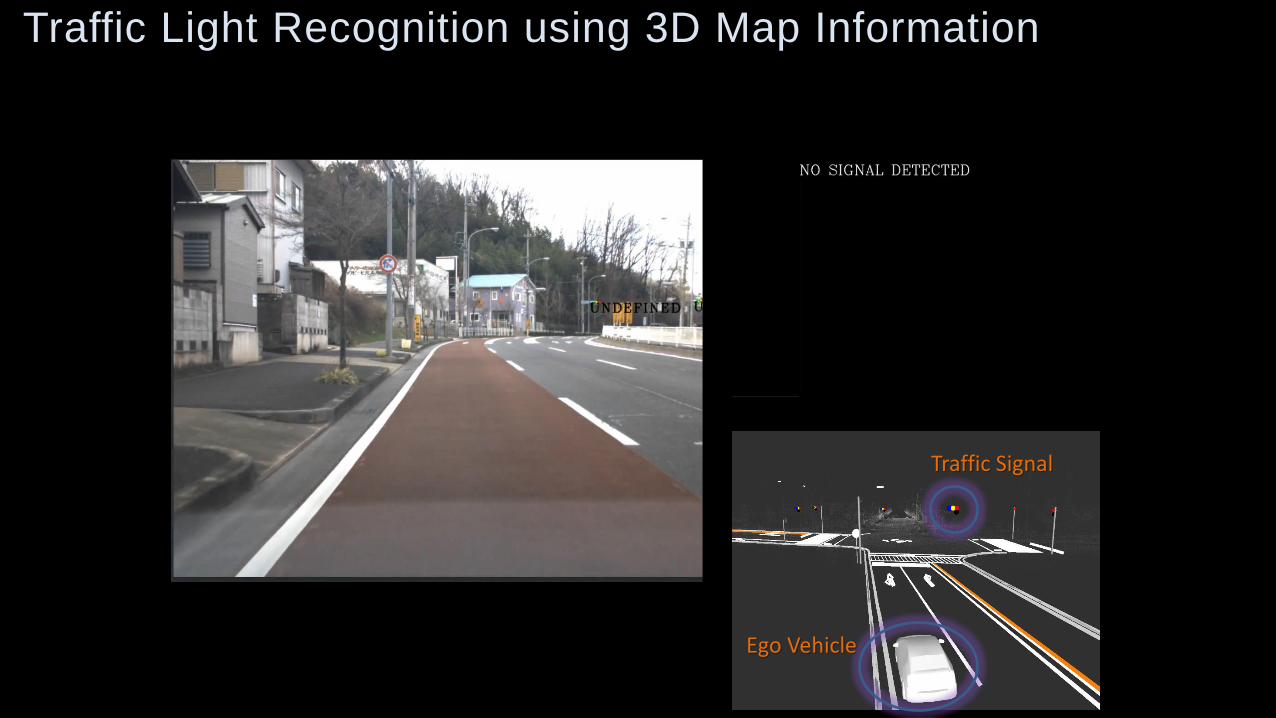
Traffic Signal
Ego Vehicle
Traffic Light Recognition using 3D Map Information


A* Search for Path Planning (Trajectory Generation)

State Lattice for Path Planning (Trajectory Generation)

Pure Pursuit for Path (Waypoints) Following

Task Trace Tool (Ftrace)

DNN Prediction
Driving School Teacher
Driving School Teacher (details)b
Automanhttps://www.automan.ai
Brake
or
Not to Brake?

NVIDIA – AutonomouStuff – Tier IV
Sensing Computing
Detection
Localization
Prediction
Perception
Decision
Planning
Motion
Mission
Intelligence State
LiDARs
Cameras
IMU
GPS
Actuation
YMC
ZMP
TMC
AS
Data Socket System Util
NVIDIA Drive PX2

NVIDIA – AutonomouStuff – Tier IV

https://github.com/CPFL/Autoware

ROSBAG STOREhttps://rosbag.tier4.jp
