applied numerical methods partial differential...
TRANSCRIPT
Applied Numerical Methods
Partial Differential Equations
Abu Hasan Abdullah
October 22, 2008
Abu Hasan Abdullah « 2008
Equation for Conic Section
• General equation for a conic section is
ax2 + bxy + cy2 + dx + ey + f = 0 (1)
where, if
b2− 4ac > 0 conic is hyperbola
b2− 4ac = 0 conic is parabola
b2− 4ac < 0 conic is ellipse
Abu Hasan Abdullah « 2008 1
Classification of PDE
Conic Section Analog
• PDEs are normally classified according to their mathematical form. In someexceptional cases they are classified according to particular physical problembeing modeled.
• Consider a 2nd order PDE of f involving independent variables x and y, writtenin similar fashion to Eq. (1) as
A∂2f
∂x2+ B
∂2f
∂x∂y+ C
∂2f
∂y2+ D
∂f
∂x+ E
∂f
∂y+ F = 0 (2)
where A, B, C, D, E and F can be functions of x, y and f
Abu Hasan Abdullah « 2008 2
Classification of PDE
Conic Section Analog
• In engineering, PDEs occur in a few common forms where A, B, and C inEq.(2) are constants. In such cases they are classified as follows
B2− 4AC > 0 hyperbolic
B2− 4AC = 0 parabolic
B2− 4AC < 0 elliptic
Abu Hasan Abdullah « 2008 3
Classification of PDE
Conic Section Analog
• In general, a PDE can have both boundary conditions (BC) and initial values(IV)
– PDEs in which only BC are specified are termed steady-state equations– PDEs in which only IV are specified are termed transient equations– PDEs in which both BC and IV are specified are termed mixed equations
Abu Hasan Abdullah « 2008 4
Classification of PDE
Impact on Solution
• Classification of PDE leads to definition of hyperbolic, parabolic and ellipticequations
• Each type of equation has a different mathematical behaviour and this reflectsdifferent physical behaviour of flow fields
• Thus, different method should be used for solving equations associated withdifferent classification
Abu Hasan Abdullah « 2008 5
Classic Examples of PDE
Navier-Stokes Equations
Navier-Stokes equations are PDEs governing the fluid motion and as derived, theyare of the closed-form mathematical expression.
Conservation of Mass
Dρ
Dt+ ρ∇ · V = 0 (3)
Abu Hasan Abdullah « 2008 6
Classic Examples of PDE
Navier-Stokes Equations
Conservation of Momentum
ρDu
Dt= −
∂p
∂x+
∂τxx
∂x+
∂τyx
∂y+
∂τzx
∂z+ ρfx (4a)
ρDv
Dt= −
∂p
∂y+
∂τxy
∂x+
∂τyy
∂y+
∂τzy
∂z+ ρfy (4b)
ρDw
Dt= −
∂p
∂z+
∂τxz
∂x+
∂τyz
∂y+
∂τzz
∂z+ ρfz (4c)
Abu Hasan Abdullah « 2008 7
Classic Examples of PDE
Navier-Stokes Equations
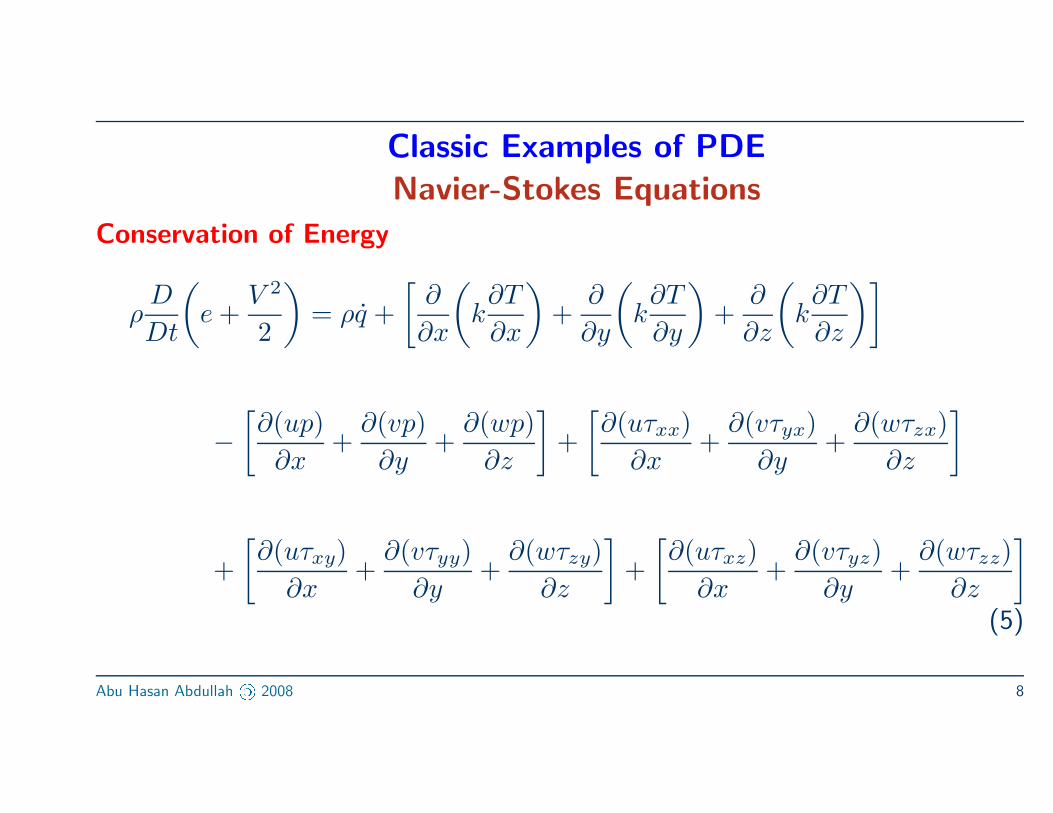
Conservation of Energy
ρD
Dt
(
e +V 2
2
)
= ρq̇ +
[∂
∂x
(
k∂T
∂x
)
+∂
∂y
(
k∂T
∂y
)
+∂
∂z
(
k∂T
∂z
)]
−
[∂(up)
∂x+
∂(vp)
∂y+
∂(wp)
∂z
]
+
[∂(uτxx)
∂x+
∂(vτyx)
∂y+
∂(wτzx)
∂z
]
+
[∂(uτxy)
∂x+
∂(vτyy)
∂y+
∂(wτzy)
∂z
]
+
[∂(uτxz)
∂x+
∂(vτyz)
∂y+
∂(wτzz)
∂z
]
(5)
Abu Hasan Abdullah « 2008 8
Classic Examples of PDE
Hyperbolic Navier-Stokes Equations
• Consider a hyperbolic equation of two independent variables x and y
• CFD computation of flow fields governed by hyperbolic equations is set up asmarching solutions. Algorithm is designed to start with the given initial values(IV), say the y-axis and sequentially calculate the flow field, step by step,marching in the x-direction
• Examples:
– Steady inviscid supersonic flows– Unsteady, inviscid flows
Abu Hasan Abdullah « 2008 9
Classic Examples of PDE
Parabolic Navier-Stokes Equations
• CFD computation of flow fields governed by parabolic equations is set up asmarching solutions. Algorithm is designed to start with the given initial values(IV), line ac and sequentially calculate the flow field, step by step, marchingin the x-direction between curves ab and cd
• Examples:
– Steady boundary-layer flows– “Parabolized” viscous flows– Unsteady thermal conduction
Abu Hasan Abdullah « 2008 10
Classic Examples of PDE
Elliptic Navier-Stokes Equations
• No limited regions of influence or domains of dependence. Solution at apoint is influenced by the entire closed boundary and must be carried outsimultaneously with the solution at all other points in the domain
• Also known as jury problems because the solution within the domain dependson the total boundary domain and BC must be applied over entire boundaryabcd
• Examples:
– Steady, subsonic, inviscid flow– Incompressible inviscid flow
Abu Hasan Abdullah « 2008 11
Coordinate Transformation
• Cartesian coordinate system (x, y, z) most widely used
• Polar coordinate system very helpful in a variety of engineering problems
• Other non-standard coordinate system is also possible to cater for differentphysical orientations of the problem
• This calls for transformation of coordinate system from one form (in mostcases the cartesian) into another (polar, skewed, etc.)
Abu Hasan Abdullah « 2008 12
Discretization
“Process by which a closed-form mathematical expression is approximatedby analogous (but different) expressions which prescribe values at only afinite number of discrete points or volumes in the domain”
Abu Hasan Abdullah « 2008 13
Numerical Solution of PDE
• Very few analytical solutions of PDE are available. Numerical solutions
employing various numerical methods are used to overcome this limitation
• Problems governed by PDE may be classified into two categories
1. equilibrium problems (steady-state)2. marching problems (transient)
Abu Hasan Abdullah « 2008 14
Numerical Solution of PDE
Equilibrium Problems
• Equilibrium or steady-state or jury problems are those in which a solution of agiven PDE is desired in a closed domain subject to a prescribed set of boundaryconditions
• They are boundary value problems
• Examples: steady-state temperature distributions, incompressible inviscid flows,and equilibrium stress distributions in solids
• Mathematically, they are governed by elliptic PDE
Abu Hasan Abdullah « 2008 15
Numerical Solution of PDE
Marching Problems
• Marching or propagation problems are transient or transient-like problemswhere the solution of a PDE is required on an open domain subject to a set ofinitial conditions and a set of boundary conditions
• They are initial value or initial boundary value problems
• Solution must be computed by marching outward from initial data surfacewhile satisfying the boundary conditions
• Mathematically, they are governed by either hyperbolic or parabolic PDE
Abu Hasan Abdullah « 2008 16
Numerical Solution of PDE
Discretization Schemes
• Various procedures using numerical methods are available
1. finite difference2. finite element3. finite volume
FINITE DIFFERENCE will be outlined
Abu Hasan Abdullah « 2008 17
Numerical Solution of PDE
Finite Difference Method (FDM)• Physical region of problem divided into a grid of nodes, whose shape is much
influenced by nature of physical problem being solved
– structured grid reflects some type of consistent geometrical regularity– unstructured grid where grid points are located in a very irregular fashion
Coordinate transformation may take place here
• Governing PDEs transformed into corresponding coordinate system that bestfit chosen physical grid pattern, then expressed in finite difference form i.e. inthis sense, the original PDEs have been discretized!
• Finite difference form of the governing PDE applied at each of nodes, whosefunctional values are related to those nearby
Abu Hasan Abdullah « 2008 18
Numerical Solution of PDE
Finite Difference Method (FDM)
• As a consequence of this application, a system of linear algebraic equations
developed which can be solved for unknown function values after proper BCand/or IV applied
Abu Hasan Abdullah « 2008 19
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Partial derivative in PDE is replaced with suitable algebraic difference quotient
i.e. finite difference
• Most common finite-difference representations of derivatives are based onTaylor’s series expansions
• If ui,j denotes x-component velocity at point (i, j), then ui+1,j at point(i + 1, j) is given by expanding Taylor series about point (i, j)
ui+1,j = ui,j +
(∂u
∂x
)
i,j
∆x +
(∂2u
∂x2
)
i,j
(∆x)2
2!+
(∂3u
∂x3
)
i,j
(∆x)3
3!+ . . . (6)
Abu Hasan Abdullah « 2008 20
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Solving Eq. (6) for (∂u/∂x)i,j
(∂u
∂x
)
i,j
=ui+1,j − ui,j
∆x︸ ︷︷ ︸finite difference
−
(∂2u
∂x2
)
i,j
(∆x)
2!−
(∂3u
∂x3
)
i,j
(∆x)2
3!− . . .
︸ ︷︷ ︸truncation error
(7)
or
(∂u
∂x
)
i,j
=ui+1,j − ui,j
∆x+ O(∆x) (8)
Abu Hasan Abdullah « 2008 21
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• If we approximate the partial derivative to first-order accuracy
(∂u
∂x
)
ij
≈ui+1,j − ui,j
∆x(9)
then the truncation error in Eq. (7) is being neglected
Abu Hasan Abdullah « 2008 22
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Now, ui−1,j at point (i − 1, j) may be similarly obtained by expanding Taylorseries about point (i, j)
ui−1,j = ui,j +
(∂u
∂x
)
i,j
(−∆x) +
(∂2u
∂x2
)
i,j
(−∆x)2
2!+
(∂3u
∂x3
)
i,j
(−∆x)3
3!+ . . .
= ui,j −
(∂u
∂x
)
i,j
∆x +
(∂2u
∂x2
)
i,j
(∆x)2
2!−
(∂3u
∂x3
)
i,j
(∆x)3
3!+ . . .
(10)
Abu Hasan Abdullah « 2008 23
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Solving Eq. (10) for (∂u/∂x)i,j
(∂u
∂x
)
i,j
=ui,j − ui−1,j
∆x+ O(∆x) (11)
Abu Hasan Abdullah « 2008 24
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• In most applications in CFD, first-order accuracy as in Eq. (11) is not sufficient.Second-order accuracy central differences are normally used.
• A finite difference quotient of second-order accuracy is constructed bysubtracting Eq. (10) from Eq. (6)
ui+1,j − ui−1,j = 2
(∂u
∂x
)
i,j
∆x + 2
(∂3u
∂x3
)
i,j
(∆x)3
3!+ . . . (12)
Abu Hasan Abdullah « 2008 25

Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Second-order central first difference with respect to x is obtained by writingEq. (12) as
(∂u
∂x
)
i,j
=ui+1,j − ui−1,j
2∆x+ O(∆x)2 (13)
• Second-order central first difference with respect to y is obtained, throughsimilar construction, and written as
(∂u
∂y
)
i,j
=ui,j+1 − ui,j−1
2∆y+ O(∆y)2 (14)
Abu Hasan Abdullah « 2008 26
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Second-order central second difference with respect to x is
(∂2u
∂x2
)
i,j
=ui+1,j − 2ui,j + ui−1,j
(∆x)2+ O(∆x)2 (15)
• Second-order central second difference with respect to y is
(∂2u
∂y2
)
i,j
=ui,j+1 − 2ui,j + ui,j−1
(∆y)2+ O(∆y)2 (16)
Abu Hasan Abdullah « 2008 27
Numerical Solution of PDE
FDM: Difference Quotients of Derivatives
• Second-order central difference for mixed derivative is
(∂2u
∂x∂y
)
i,j
=ui+1,j+1 − ui+1,j−1 − ui−1,j+1 + ui−1,j−1
4∆x∆y+ O[(∆x)2, (∆y)2]
(17)
Abu Hasan Abdullah « 2008 28
Using Finite Difference Method to Solve PDE
Steps
1. Physical region of problem divided into a grid of nodes, whose shape is muchinfluenced by nature of physical problem being solved, Figure 1;
• structured grid reflects some type of consistent geometrical regularity• unstructured grid where grid points are located in a very irregular fashion
2. Governing PDEs transformed into corresponding coordinate system that bestfit chosen physical grid pattern, then expressed in finite difference form i.e. inthis sense, the original PDEs have been discretized!. Coordinate transformation
may take place here
Abu Hasan Abdullah « 2008 29
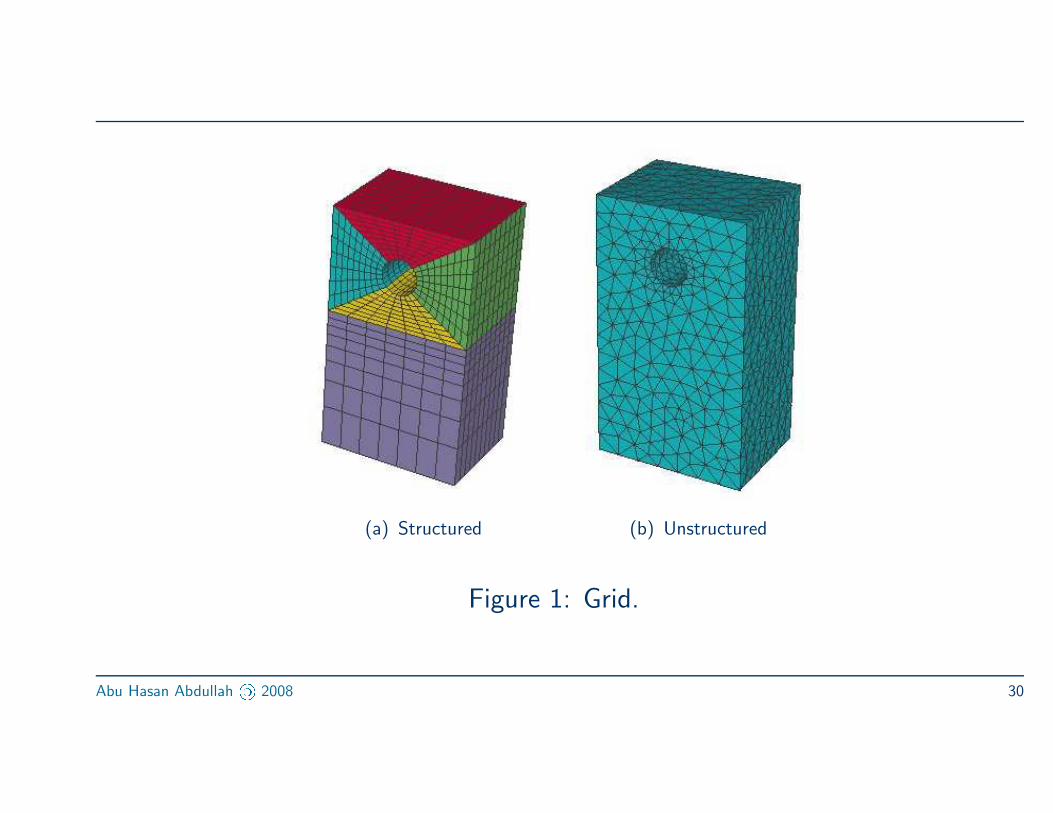
(a) Structured (b) Unstructured
Figure 1: Grid.
Abu Hasan Abdullah « 2008 30
Using Finite Difference Method to Solve PDE
Steps
3. For example take the PDE governing transient temperature distribution in onespatial dimension
∂T
∂t− α
∂2T
∂x2= 0 (18)
which can be expressed as a central difference
PDE︷ ︸︸ ︷
∂T
∂t− α
∂2T
∂x2= 0 ≈
T n+1i − T n
i
∆t− α
(T ni+1 − 2T n
i + T ni−1)
(∆x)2︸ ︷︷ ︸
difference equation
(19)
Abu Hasan Abdullah « 2008 31
Using Finite Difference Method to Solve PDE
Steps
4. The finite difference form of the governing PDE is then applied at each ofnodes, whose functional values are related to those nearby
5. As a consequence of this application, a system of linear algebraic equations
developed which can be solved for unknown function values after proper BCand/or IV applied
Abu Hasan Abdullah « 2008 32
Using Finite Difference Method to Solve PDE
Coordinate Transformation
• Cartesian coordinate system (x, y, z) most widely used
• Polar coordinate system very helpful in a variety of engineering problems
• Other non-standard coordinate system is also possible to cater for differentphysical orientations of the problem
• This calls for transformation of coordinate system from one form (in mostcases the cartesian) into another (polar, skewed, etc.)
• We will cover this in greater details in the next chapter
Abu Hasan Abdullah « 2008 33
Using Finite Difference Method to Solve PDE
Solution Techniques
• Difference equations formed from the discretization of PDE may be solvedusing one of these two techniques
1. explicit approach2. implicit approach
• We will use the parabolic 1-D heat conduction equation of Eq. (18)
∂T
∂t= α
∂2T
∂x2
to show differences in the two approaches
Abu Hasan Abdullah « 2008 34
Using Finite Difference Method to Solve PDE
Explicit Solution Technique
• Discretize Eq. (18) into a difference equation
T n+1i − T n
i
∆t= α
(
T ni+1 − 2T n
i + T ni−1
)
(∆x)2(20)
and re-arrange
T n+1i = T n
i + α∆t
(∆x)2
(
T ni+1 − 2T n
i + T ni−1
)
(21)
where n is the time level
Abu Hasan Abdullah « 2008 35
Using Finite Difference Method to Solve PDE
Explicit Solution Technique
• In Eq. (21)
LHS = unknown properties at time level n + 1
RHS = known properties at time level n
• Eq. (21) allows direct calculation of T n+1i which is sequentially applied to all
grid points, i = 1, 2, . . . in the problem domain. This is an explicit approach
• Thus, in an explicit approach each difference equation contains only ONEunknown which can be explictly solved in a straightforward manner
Abu Hasan Abdullah « 2008 36
Using Finite Difference Method to Solve PDE
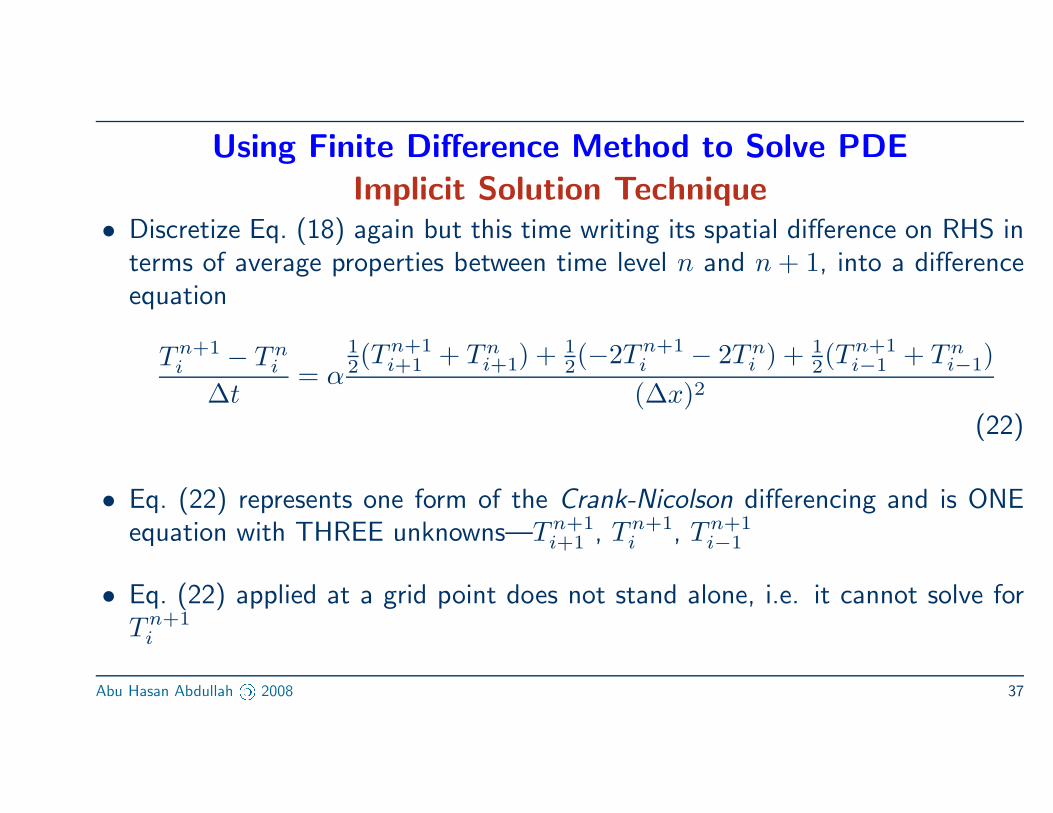
Implicit Solution Technique• Discretize Eq. (18) again but this time writing its spatial difference on RHS in
terms of average properties between time level n and n + 1, into a differenceequation
T n+1i − T n
i
∆t= α
12(T
n+1i+1 + T n
i+1) + 12(−2T n+1
i − 2T ni ) + 1
2(Tn+1i−1 + T n
i−1)
(∆x)2
(22)
• Eq. (22) represents one form of the Crank-Nicolson differencing and is ONEequation with THREE unknowns—T n+1
i+1 , T n+1i , T n+1
i−1
• Eq. (22) applied at a grid point does not stand alone, i.e. it cannot solve forT n+1
i
Abu Hasan Abdullah « 2008 37
Using Finite Difference Method to Solve PDE
Implicit Solution Technique
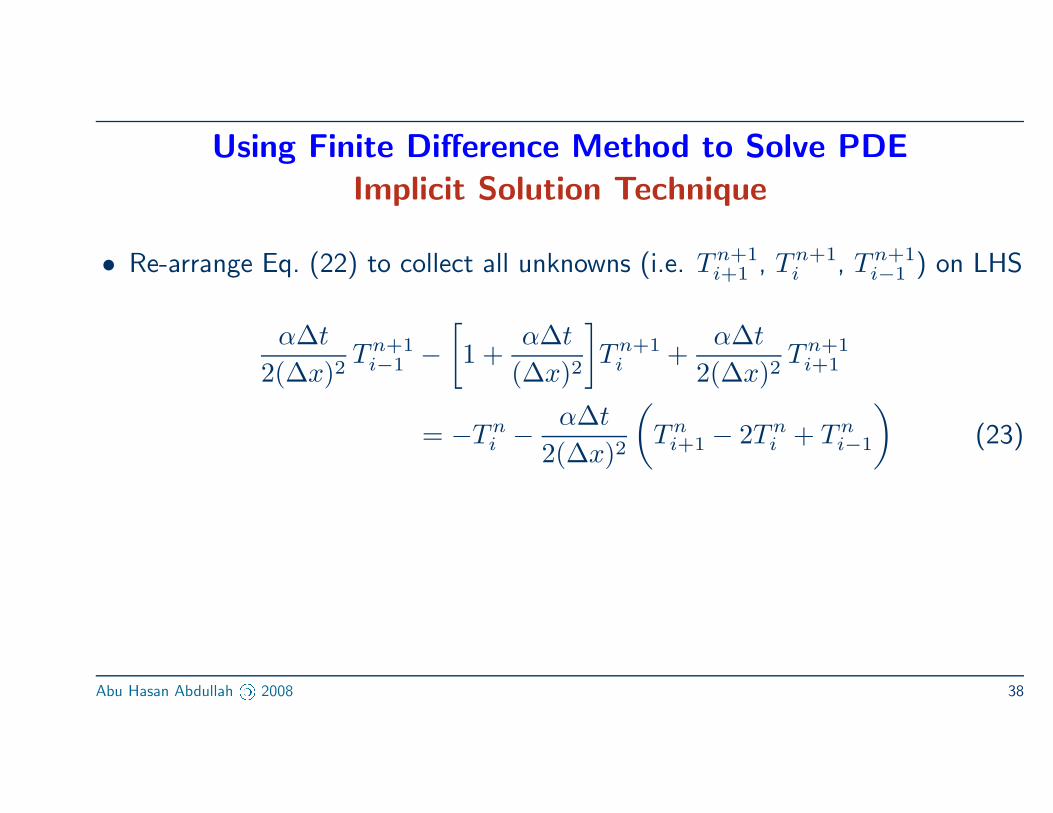
• Re-arrange Eq. (22) to collect all unknowns (i.e. T n+1i+1 , T n+1
i , T n+1i−1 ) on LHS
α∆t
2(∆x)2T n+1
i−1 −
[
1 +α∆t
(∆x)2
]
T n+1i +
α∆t
2(∆x)2T n+1
i+1
= −T ni −
α∆t
2(∆x)2
(
T ni+1 − 2T n
i + T ni−1
)
(23)
Abu Hasan Abdullah « 2008 38
Using Finite Difference Method to Solve PDE
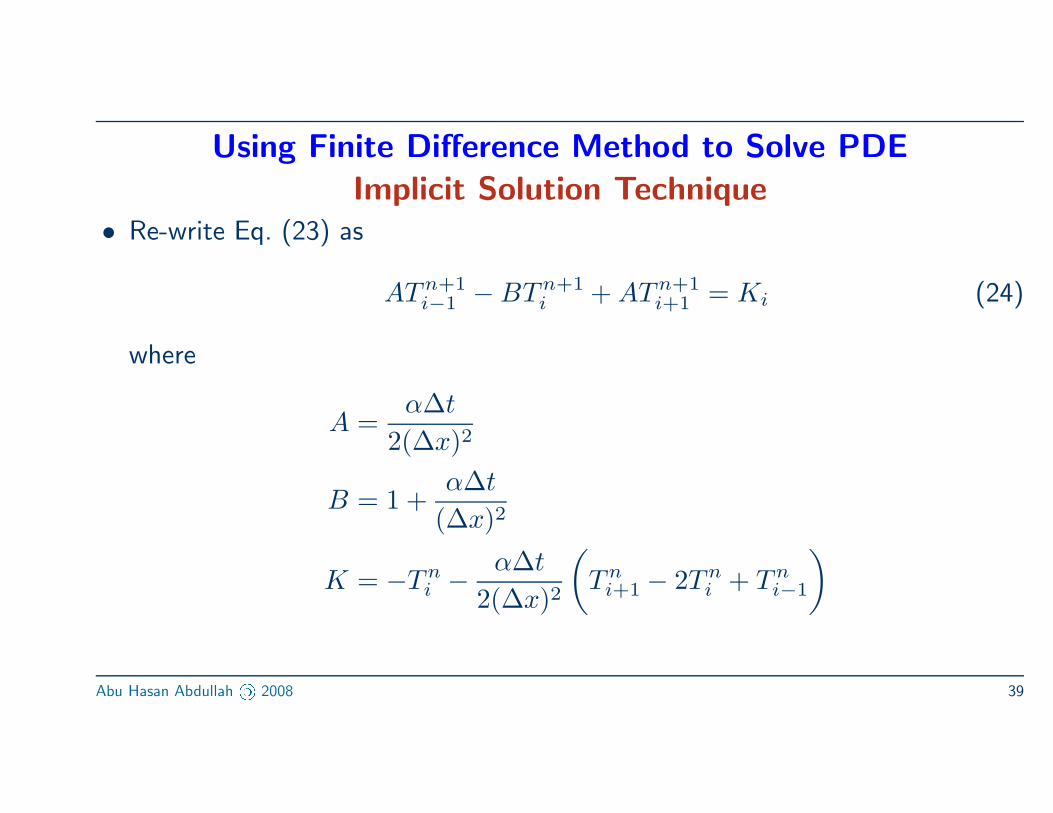
Implicit Solution Technique• Re-write Eq. (23) as
AT n+1i−1 − BT n+1
i + AT n+1i+1 = Ki (24)
where
A =α∆t
2(∆x)2
B = 1 +α∆t
(∆x)2
K = −T ni −
α∆t
2(∆x)2
(
T ni+1 − 2T n
i + T ni−1
)
Abu Hasan Abdullah « 2008 39
Figure 2: An implicit finite-difference module.
Abu Hasan Abdullah « 2008 40
Using Finite Difference Method to Solve PDE
Implicit Solution Technique
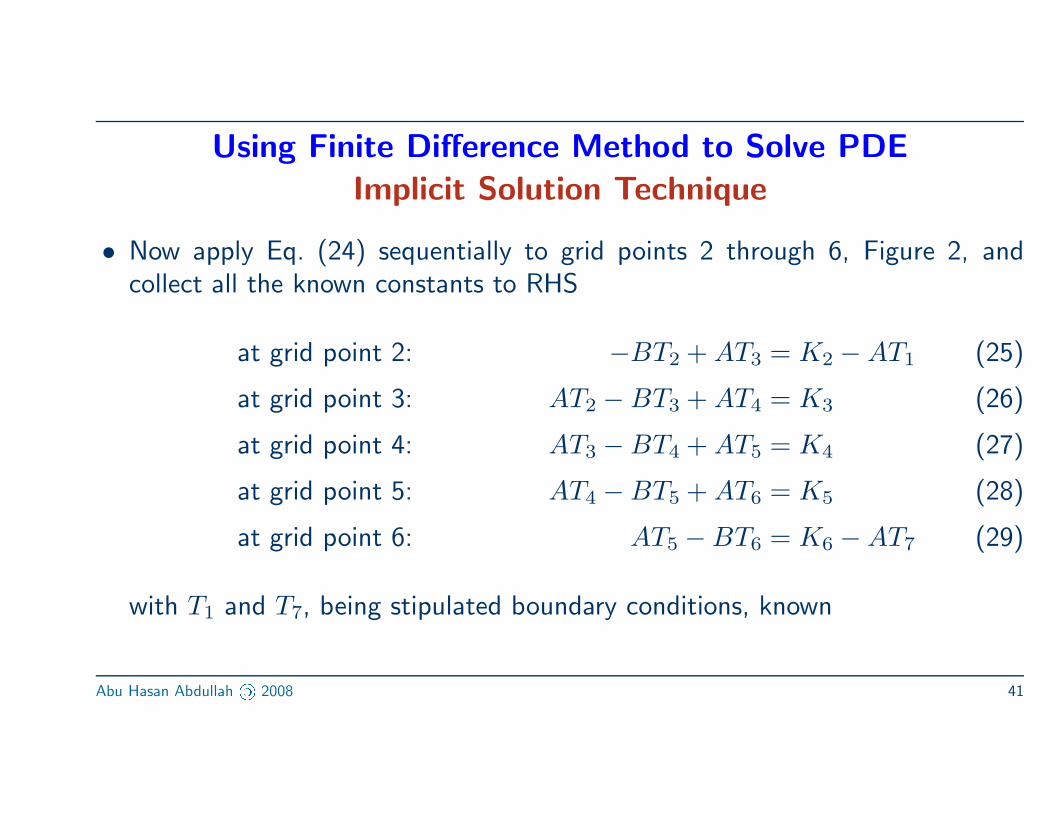
• Now apply Eq. (24) sequentially to grid points 2 through 6, Figure 2, andcollect all the known constants to RHS
at grid point 2: −BT2 + AT3 = K2 − AT1 (25)
at grid point 3: AT2 − BT3 + AT4 = K3 (26)
at grid point 4: AT3 − BT4 + AT5 = K4 (27)
at grid point 5: AT4 − BT5 + AT6 = K5 (28)
at grid point 6: AT5 − BT6 = K6 − AT7 (29)
with T1 and T7, being stipulated boundary conditions, known
Abu Hasan Abdullah « 2008 41
Using Finite Difference Method to Solve PDE
Implicit Solution Technique
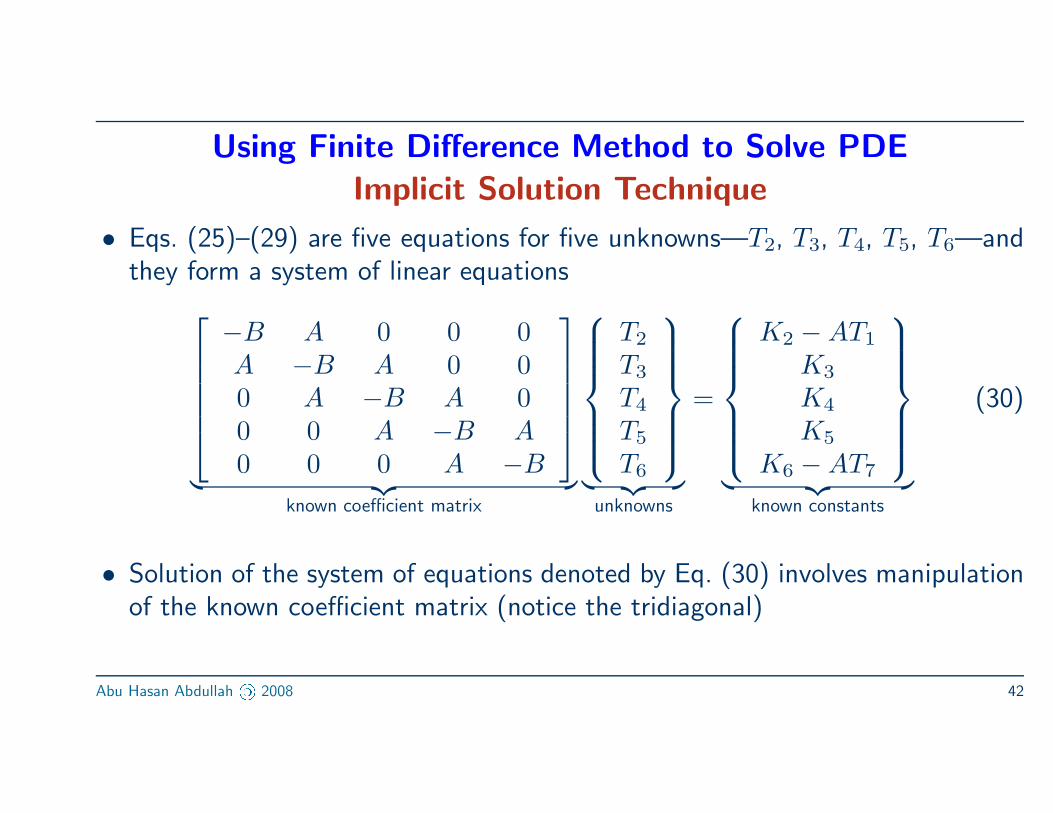
• Eqs. (25)–(29) are five equations for five unknowns—T2, T3, T4, T5, T6—andthey form a system of linear equations
−B A 0 0 0A −B A 0 00 A −B A 00 0 A −B A0 0 0 A −B
︸ ︷︷ ︸known coefficient matrix
T2
T3
T4
T5
T6
︸ ︷︷ ︸unknowns
=
K2 − AT1
K3
K4
K5
K6 − AT7
︸ ︷︷ ︸known constants
(30)
• Solution of the system of equations denoted by Eq. (30) involves manipulationof the known coefficient matrix (notice the tridiagonal)
Abu Hasan Abdullah « 2008 42
Homeworks
Read through Chapter 4 of Computational Fluid Dynamics (1995), Anderson,
J.D. and discuss briefly the meaning of
1. structured grids
2. unstructured grids
3. first-order-accurate finite-difference expression
4. second-order-accurate finite-difference expression
5. truncation error and its influence on your CFD calculation
Abu Hasan Abdullah « 2008 43
HomeworksUsing central-difference approximations, find the solution of the wave equation, represented by a
second-order hyperbolic equation:
∂2φ
∂x=
∂2φ
∂t2, 0 ≤ x ≤ 1
subject to the boundary conditions
φ(0, t) = 0 t > 0
φ(1, t) = 0 t > 0
and initial conditions
φ(x, 0) = sin πx 0 ≤ x ≤ 1
∂φ
∂t(x, 0) = 0 0 ≤ x ≤ 1
Abu Hasan Abdullah « 2008 44
Figure 3: 2-D finite difference discretization
Abu Hasan Abdullah « 2008 45