an info-gap approach to modelling risk and uncertainty in bio-surveillance having imperfect...
Post on 21-Dec-2015
213 views
TRANSCRIPT

An Info-gap Approach to Modelling Risk and Uncertainty in Bio-surveillance having Imperfect Detection rates
Prof. David R. Fox

Acknowledgements:
• Prof. Yakov Ben-Haim (Technion, Israel)
• Prof. Colin Thompson (University of Melbourne)

Risk versus Uncertainty
1. risk = hazard x exposure or
risk = likelihood x consequence
2. Duckworth (1998):• is a qualitative term • cannot be measured • is not synonymous with probability • “to ‘take a risk’ is to allow or cause exposure to the
danger”
3. is the chance, within a specified time frame, of an adverse event with specific (negative) consequences
Risk
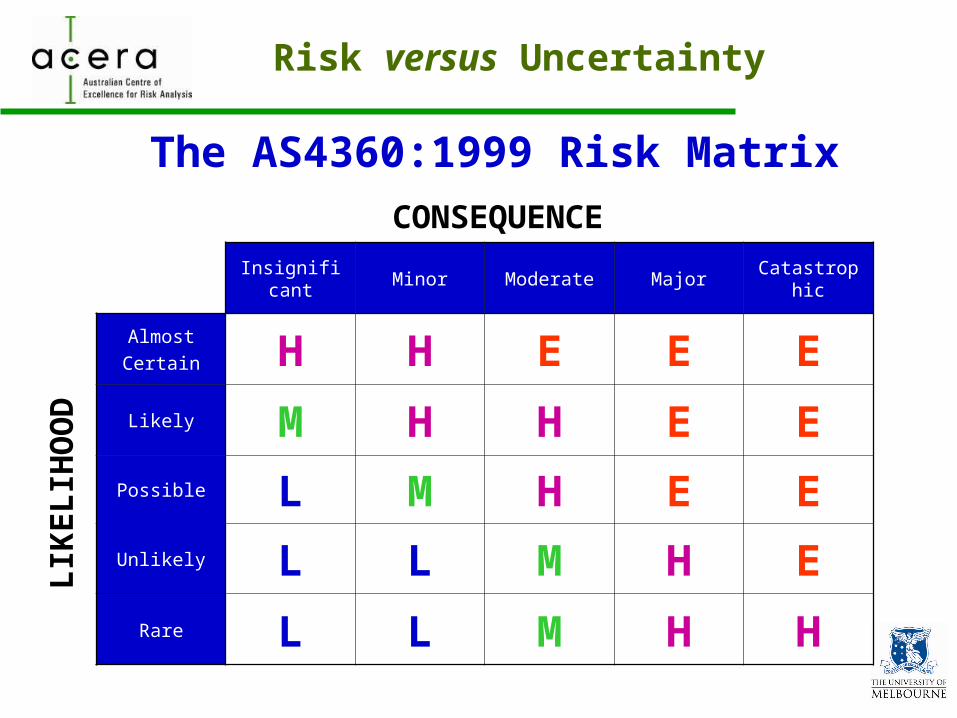
Insignificant Minor Moderate Major Catastrophic
Almost
Certain H H E E E
Likely M H H E E
Possible L M H E E
Unlikely L L M H E
Rare L L M H H
The AS4360:1999 Risk Matrix
CONSEQUENCE
LIK
EL
IHO
OD
Risk versus Uncertainty

• Development and adoption of a ‘standard’ risk metric seems a long way off (never?);
• Bayesian methods are becoming increasingly popular, although acceptance may be hampered by biases and lack of understanding;
• More attention needs to be given to appropriate statistical modelling. In particular:
- model choice- Parameter estimation- Distributional assumptions- ‘Outlier’ detection and treatment- robust alternatives (GLMs, GAMs, smoothers etc).
Risk

Uncertainty
• Severe uncertainty → almost no knowledge about likelihood
• Arises from:
- Ignorance
- Incomplete understanding
- Changing conditions
- Surprises
• Is ignorance probabilistic?
Ignorance is not probabilistic – it is an info-gap

Shackle-Popper Indeterminism
Intelligence
• What people know, influences how they behave
Discovery
• What will be discovered tomorrow cannot be known today
Indeterminism
• Tomorrow’s behaviour cannot be modelled completely today

Knightian Uncertainty
Frank Knight • Nov 7 1885 – Apr 15 1972• Economist• Author (Risk, Uncertainty and Profit)
Knightian Uncertainty
• Differentiates between risk and uncertainty
→ unknown outcomes and known probability distributions
• Different to situations where pdf of a random outcome is known

Dealing with Uncertainties
Strategies
• Worst-case
• Max-Min (utility)
• Min-Max (loss)
• Maximize expected utility
• Pareto optimization
• “Expert” opinion
• Bayesian approaches
• Info-Gap
Info-Gap Theory (Ben-Haim 2006)
• Is a quantitative, non-probabilistic approach to modelling true Knightian uncertainty;
• Seeks to optimize robustness / immunity to failure or opportunity of windfall;
• Contrasts with classical decision theory which typically seeks to maximize expected utility;
An info-gap is the difference between what is known and what needs to be known in order to make a reliable and responsible decision.
Components of an Info-Gap Model
1. Uncertainty Model
• Consists of nominal values of unknowns and an horizon of uncertainty
2. Performance requirement
• Inequalities expressed in terms of unknowns
2. Robustness Criterion
• Is the largest for which the performance requirements in (2) are met realisations of unknowns in the uncertainty model (1)
• ‘Unknowns’ can be probabilities of adverse outcome
0

Robustness and Opportuneness
Uncertainty
Pernicious
Propitious
Robustness and Opportuneness
Robustness (immunity to failure)
is the greatest horizon of uncertainty at which failure cannot occur
Opportuneness (immunity to windfall gain )
is the least level of uncertainty which guarantees sweeping success
Note: robustness/opportuneness requires optimisation but not of the performance criterion.

Robust satisficing vs direct optimization
Alternatives to optimization:
• Pareto improvement – an alternative ‘solution’ which leaves one individual better off without making anyone else worse off.
• Pareto optimal – when no further Pareto improvements can be made
• Principle of good enough – where quick and simple preferred to elaborate
• Satisficing (Herbert Simon, 1955) – to achieve some minimum level of performance without necessarily optimizing it.

Robust satisficing
Decision is preferred over if robustness of is > robustness of
at the same level of reward; i.e
> if , ,
where is reward required.
c c
c
q q q q
q q q r q r
r
c
Thus, if is the set of all feasible decision vectors ,
a robust-satisficing decision is one which maximizes
robustness on and satisfices performance at .
i.e
= arg max
c
cq
q
r
q r
c
,
Note: usually (although not necessarily) dependes on
c
c c
q r
q r r
Robust satisficing
Fractional Error Models
• Best estimate of uncertain function U(x) is U(x)
-Although fractional error of this estimate is unknown
• The unbounded family of nested sets of functions is a fractional-error info-gap model:
~
, : ; 0U u u x u x u x u x

IG Models : Basic Axioms
All IG models obey 2 basic axioms:
1. Nesting
2. Contraction
, is nested if <
, ,
U u
U u U u
0, is a singleton set containing
its center point 0,
U u
U u u
i.e when horizon of uncertainty is zero, the estimate is correctu

An IG application to bio-surveillance
• Thompson (unpublished) examined the general sampling problem associated with inspecting a random sample of n items (containers, flights, people, etc.) from a finite population of N using an info-gap approach.
• The info-gap formulation of the problem permitted the identification of a sample size n such that probability of adverse outcome did not exceed a nominal threshold, when severe uncertainty about this probability existed.
• Implicit in this formulation was the assumption that the detection probability (ie. the probability of detecting a weapon, adverse event, anomalous behaviour etc.) once having observed or inspected the relevant item / event / behaviour was unity.

Surveillance with Imperfect Detection
I – the event that an object is inspected;
W – the event that an object is a security threat (eg. the object is a weapon, the person is a terrorist, the behaviour is indicative of malicious intent);
D – the event that the security breach is identified / detected.
Furthermore, we assume that only inspected objects are classified as either belonging
to D orD . We thus have I D D and hence
P I P D P D

Surveillance with Imperfect Detection
Arguably, the more important probability is
P W D
and not P W
Define: detection efficiency = P DW P W
nP I
N

Surveillance with Imperfect Detection
Can show (see paper), that:
1 1
, ,1 1
P W D p
For 100% inspections:
11, ,
1P W D p
Furthermore:
, , 1, , 0< 1p p
Surveillance with Imperfect Detection
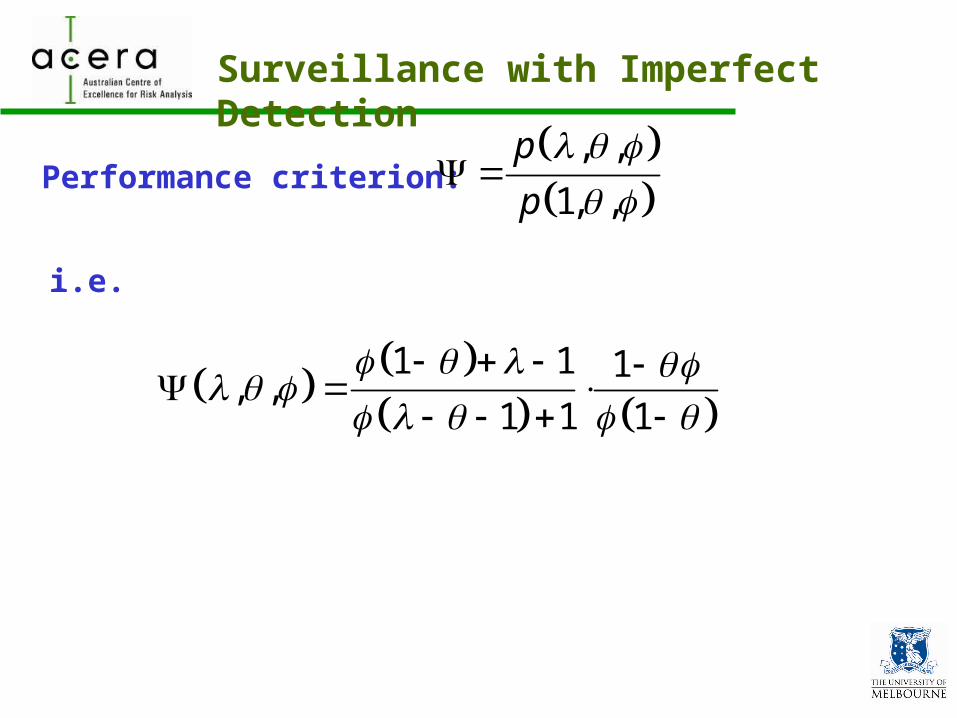
Performance criterion:
, ,
1, ,
p
p
1 1 1
, ,1 1 1
i.e.

Surveillance with Imperfect Detection
Fractional error model:
, : max 0, 1 min 1, 1
, , , 0 max 0, 1 min 1, 1
U
Robustness function:
, , ,
, max : min , ,d dU

Surveillance with Imperfect Detection
Example
• Dept. of Homeland Security intelligence → attack on aircraft imminent
• Nature / mode of attack unknown
• All estimates (detection prob., prob. of attack etc.) subject to extreme uncertainty.
Let , with 0.7 and 0.05

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
lambda=0.4lambda=0.5lambda=0.6lambda=0.7lambda=0.8lambda=0.85lambda=0.9lambda=0.975min performance requirement
lambda=0.4lambda=0.5lambda=0.6lambda=0.7lambda=0.8lambda=0.85lambda=0.9lambda=0.975min performance requirement
Robustness
Per
form
ance
Surveillance with Imperfect Detection
0.4
0.5
0.6
0.7
0.8 0.85
0.9
0.975
Surveillance with Imperfect Detection
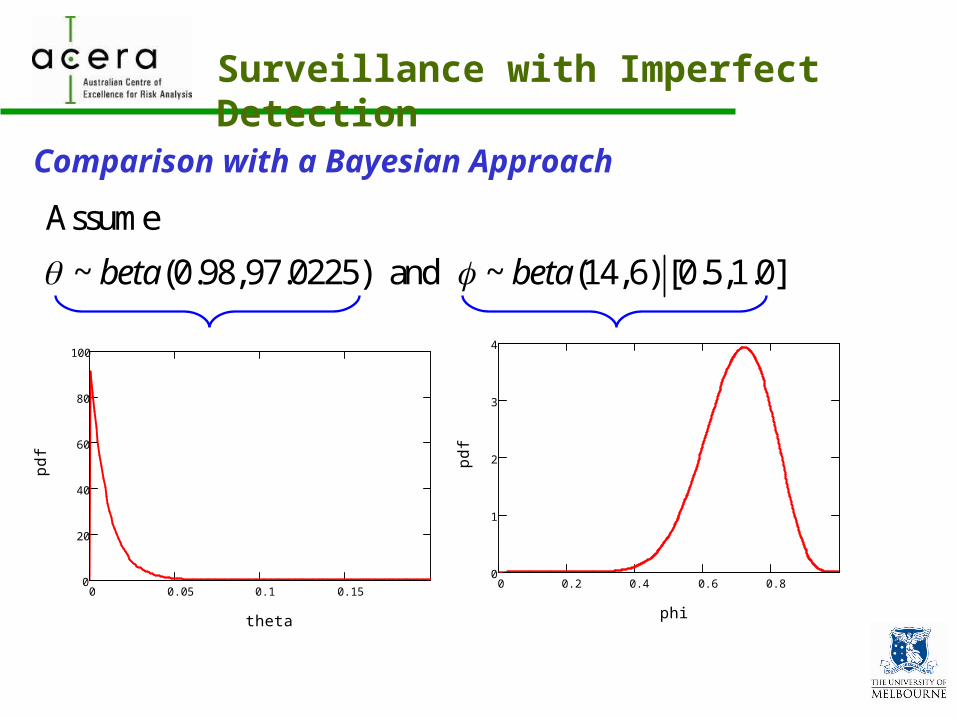
Comparison with a Bayesian Approach
Assume
~ (0.98,97.0225) and ~ (14,6) [0.5,1.0]beta beta
0 0.2 0.4 0.6 0.80
1
2
3
4
phi
0 0.05 0.1 0.150
20
40
60
80
100
theta

psi
Probability
1.000.950.900.850.800.750.700.650.60
1.0
0.8
0.6
0.4
0.2
0.0
0.8
0.783
0.827
0.86
0.88
0.91
Surveillance with Imperfect Detection