an adaptive neuro-fuzzy system for … adaptive neuro-fuzzy system for automatic image segmentation...
TRANSCRIPT
IJDW Volume 4 • Number 1 • January-June 2012 • pp. 33-40
AN ADAPTIVE NEURO-FUZZY SYSTEM FOR AUTOMATIC IMAGESEGMENTATION AND EDGE DETECTIONShweta Lawanya Rao1 and C.L. Chandrakar2
1SSCET, Bhilai, E-mail: [email protected], Bhilai, E-mail: [email protected]
Abstract: An autoadaptive neuro-fuzzy segmentation and edge detection architecture is presented. The systemconsist of a multilayer perceptron (MLP)-like network that performs image segmentation by adaptivethresholding of the input image using labels automatically pre-selected by a fuzzy clustering technique. Theproposed architecture is feedforward, but unlike the conventional MLP the learning is unsupervised. Theoutput status of the network is described as a fuzzy set. Fuzzy entropy is used as a measure of the error of thesegmentation system as well as a criterion for determining potential edge pixels. The proposed system iscapable to perform automatic multilevel segmentation of images, based solely on information contained bythe image itself. No a priori assumptions whatsoever are made about the image (type, features, contents,stochastic model, etc.). Such an “universal” algorithm is most useful for applications that are supposed towork with different (and possibly initially unknown) types of images. The proposed system can be readilyemployed, “as is”, or as a basic building block by a more sophisticated and/or application-specific imagesegmentation algorithm. By monitoring the fuzzy entropy relaxation process, the system is able to detectedge pixels.
Keyword: Adaptive thresholding, fuzzy entropy, image segmentation, neuro-fuzzy system, self-organizingsystem.
1. INTRODUCTION
IMAGE segmentation is the technique ofdecomposing an image into meaningful parts, orobjects. It results in a segmented image, where eachobject is labeled in a way that facilitates thedescription of the original image so that it can beinterpreted by the system that handles the image. Ingeneral,the classification of an image’s pixels asbelonging to one of the “objects” (i.e., classes)composing the image is based on some commonfeature(s), or resemblance to some pattern. In orderto determine which are the features that can lead toa successful classification, some a priori knowledgeor/and assumptions about the image are usuallyrequired. It is due to this fact that the best results areobtained by segmentation algorithms “tailored” forspecific applications (but which will perform poorlyon applications other than the one they weredesigned for).
The majority of the segmentation algorithmsproduce two level, or “object and background”segmentation. While such a result is appropriate for
some of the ‘classical’ image processing applicationssuch as the automatic image analysis of documentsor industrial parts, it is not satisfactory forapplications dealing with more complex scenes,where several objects have to be detected.
In this paper, we propose a system capable toperform multilevel segmentation of images in anautomatic/unsupervised way. No a prioriassumptions whatsoever are made about the image(type, features, contents, stochastic model, etc.). Suchan “universal” algorithm is most useful forapplications that are supposed to work with different(and possibly initially unknown) types of images(e.g., searching for images on the Internet or in thephoto archive of a magazine). The proposed systemcan be readily employed, “as is”, or as a basicbuilding block by a more sophisticated imagesegmentation algorithm (that incorporatesadditional “knowledge” into different parts of thesystem). The proposed neuro-fuzzy segmentationsystem is self organizing. It consists of a multilayerperceptron (MLP)-like network that performs image
34 Shweta Lawanya Rao and C.L. Chandrakar
segmentation by adaptive thresholding of the inputimage using labels automatically pre-selected by afuzzy clustering technique. The proposed archi-tecture is feed forward, but unlike the conventionalMLP, the learning is unsupervised. The output statusof the network is described as a fuzzy set. Fuzzyentropy is used as a measure of the error of thesegmentation system. Because this measure handlesonly one aspect of the quality of the segmentation,and because no satisfactory quality measures wereproposed in the literature, the results are analyzedmainly by visual inspection and comparison withresults obtained by other algorithms.
One of the main roadblocks toward fullautomation of the segmentation system is theproblem of automatically choosing the correctnumber of labels. This parameter, of crucialimportance to most labeling methods, is usually veryhard to determine automatically, and in most casesit is left as a parameter which has to be provided bythe user. Some methods of employing cluster validitymeasures to solve this problem were tested, andsome preliminary results are presented in this paper.
2. METHODOLOGY
Overview of the Proposed System: The proposedsystem consists of a multilayer neural network thatperforms adaptive, ultilevel thresholding of theimage using labels automatically preselected by afuzzy clustering technique. The learning techniqueemployed is self-supervised allowing, therefore,automatic adaptation of the NN. The output statusof the network is described as a fuzzy partition.Fuzzy entropy is used as a measure of the error ofthe system as well as a criterion for determiningpotential edge pixels. Given an input image, thesystem is forced to evolve toward a minimum fuzzyentropy state in order to obtain image segmentation.Pixels most affected by the consecutive trainingiterations (due to the amount of their contributionto the fuzzy entropy of the system) are labelled asedge pixels.
2.1 System Description
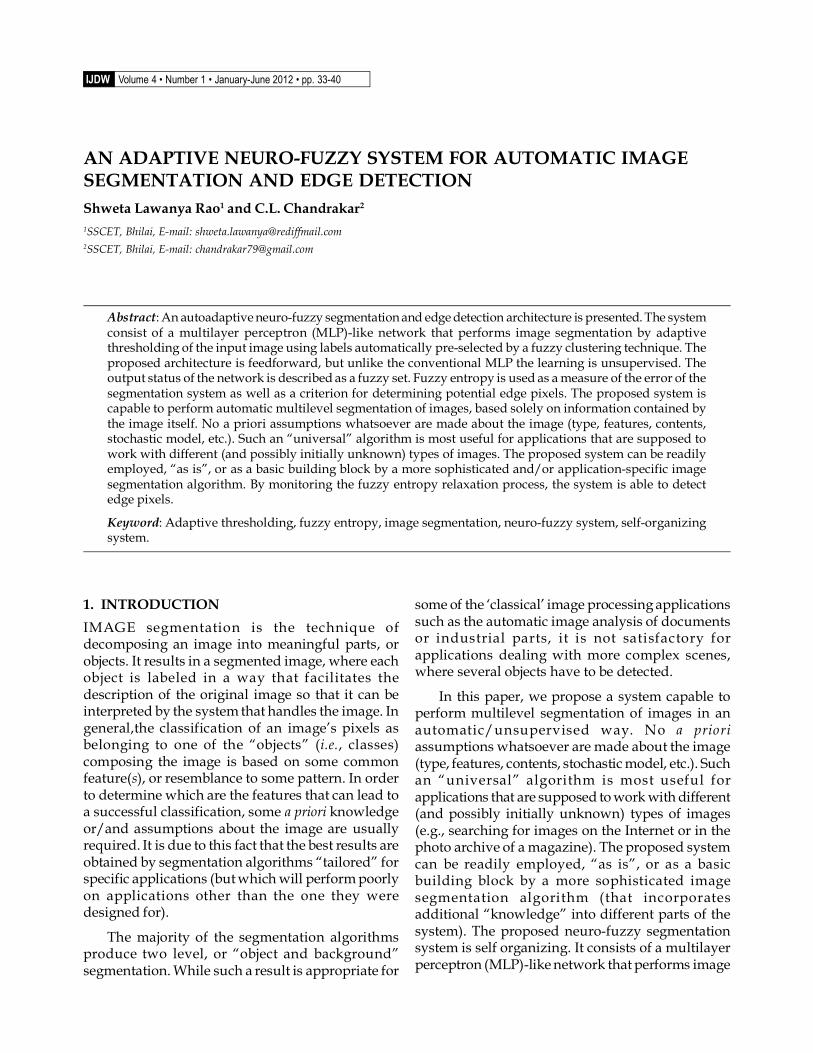
A general flowchart of the proposed algorithm isdepicted in Figure 1. First, labels are found byapplying the FCM algorithm to the image histogram.Then, the information about the labels is employedto build the network’s activation and error functions.The input to a neuron in the input layer is normalizedbetween [0-1], proportionally to the gray value of
the correspondent pixel. The image information isfirst propagated forward using (11) to get the outputstatus of the network. The output value of eachneuron lies in the interval [0-1]. Then, the outputerror is calculated and then back-propagated toupdate the weights [(14)]. Training continues eitheruntil a minimum error or until a maximum numberof iterations is reached. The output of the system atthis stage constitutes the segmented image.Integrating (summing) the thresholded (binarized)differences between the output at consecutive epochsyields the edge image.
Input Image
Calculate histogram
FCM
ClusterValidity
Error function defliation
NN adaptivethresolding
FuzzyEntropycalculation
Segmented ImageEdge image
Integrate
cut(n)-cut(n-1) 0
Figure 1: General Flowchart
Viewed as a system, the proposed algorithmconsists of three main processing blocks:
The (fuzzy) error function definition block (A),
The adaptive thresholding block (B) and
The optional edge detection block (C).
(1) Error Function Definition (Block A): Thepurpose of this stage is to provide the objective error
An Adaptive Neuro-Fuzzy System for Automatic Image Segmentation and Edge Detection 35
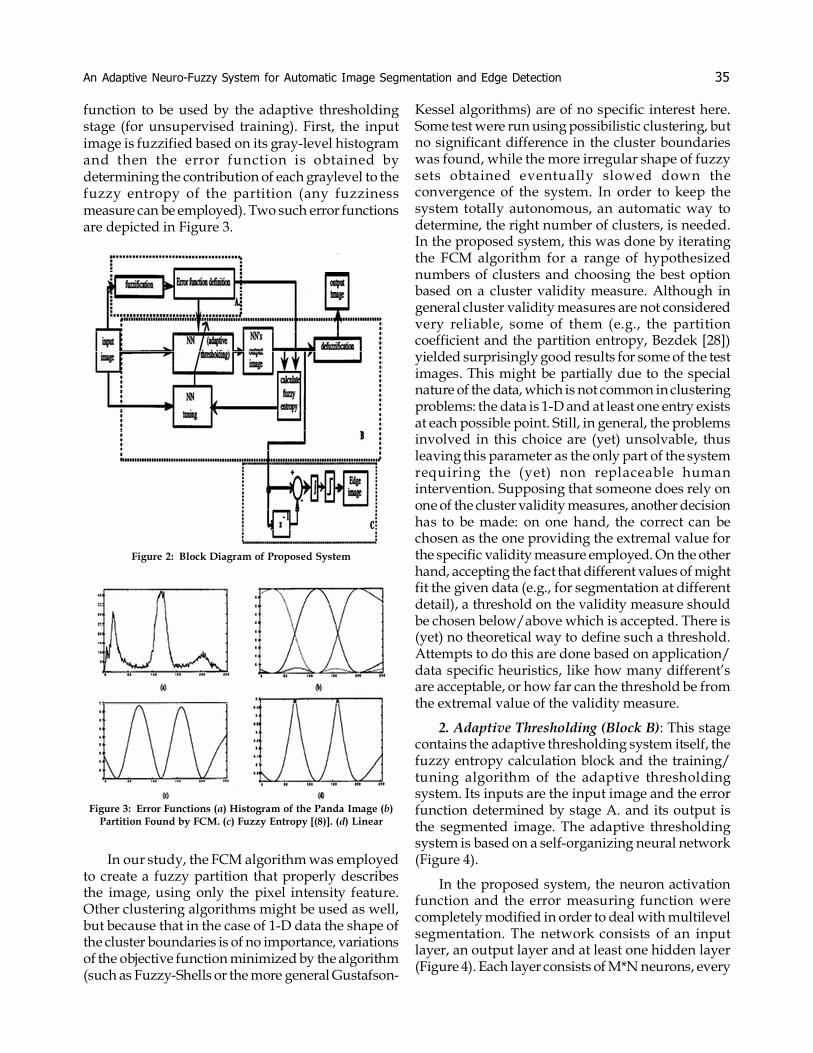
function to be used by the adaptive thresholdingstage (for unsupervised training). First, the inputimage is fuzzified based on its gray-level histogramand then the error function is obtained bydetermining the contribution of each graylevel to thefuzzy entropy of the partition (any fuzzinessmeasure can be employed). Two such error functionsare depicted in Figure 3.
Kessel algorithms) are of no specific interest here.Some test were run using possibilistic clustering, butno significant difference in the cluster boundarieswas found, while the more irregular shape of fuzzysets obtained eventually slowed down theconvergence of the system. In order to keep thesystem totally autonomous, an automatic way todetermine, the right number of clusters, is needed.In the proposed system, this was done by iteratingthe FCM algorithm for a range of hypothesizednumbers of clusters and choosing the best optionbased on a cluster validity measure. Although ingeneral cluster validity measures are not consideredvery reliable, some of them (e.g., the partitioncoefficient and the partition entropy, Bezdek [28])yielded surprisingly good results for some of the testimages. This might be partially due to the specialnature of the data, which is not common in clusteringproblems: the data is 1-D and at least one entry existsat each possible point. Still, in general, the problemsinvolved in this choice are (yet) unsolvable, thusleaving this parameter as the only part of the systemrequiring the (yet) non replaceable humanintervention. Supposing that someone does rely onone of the cluster validity measures, another decisionhas to be made: on one hand, the correct can bechosen as the one providing the extremal value forthe specific validity measure employed. On the otherhand, accepting the fact that different values of mightfit the given data (e.g., for segmentation at differentdetail), a threshold on the validity measure shouldbe chosen below/above which is accepted. There is(yet) no theoretical way to define such a threshold.Attempts to do this are done based on application/data specific heuristics, like how many different’sare acceptable, or how far can the threshold be fromthe extremal value of the validity measure.
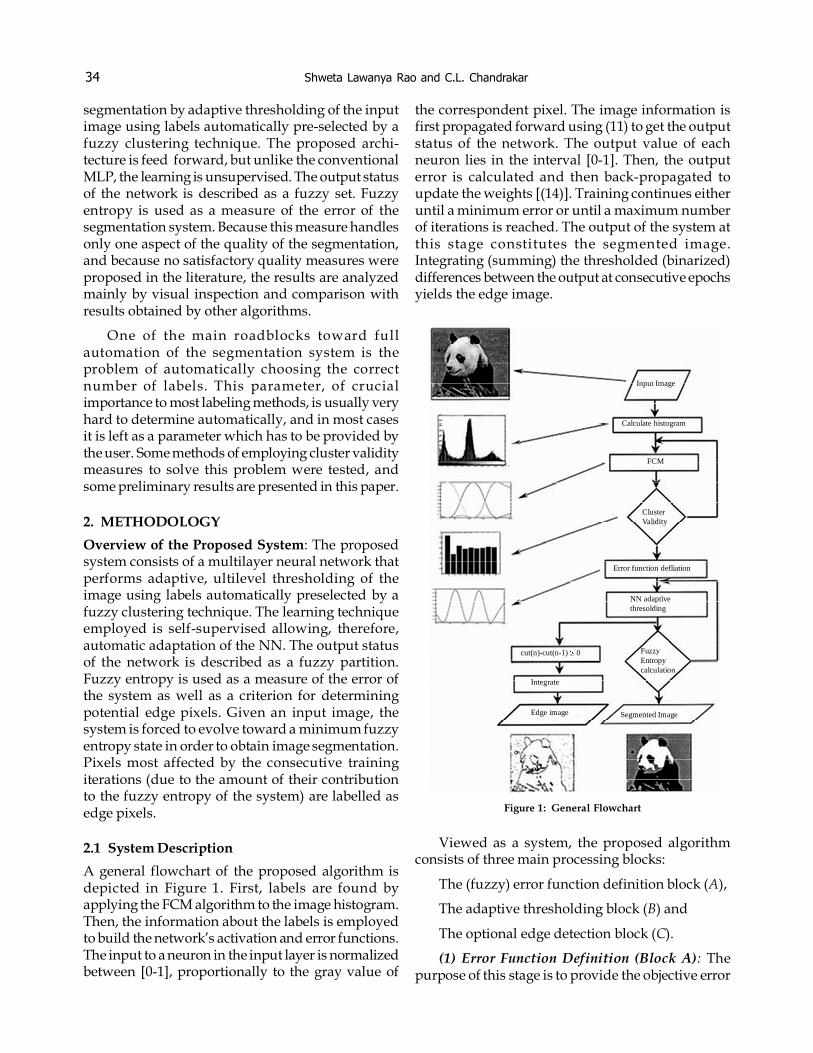
2. Adaptive Thresholding (Block B): This stagecontains the adaptive thresholding system itself, thefuzzy entropy calculation block and the training/tuning algorithm of the adaptive thresholdingsystem. Its inputs are the input image and the errorfunction determined by stage A. and its output isthe segmented image. The adaptive thresholdingsystem is based on a self-organizing neural network(Figure 4).
In the proposed system, the neuron activationfunction and the error measuring function werecompletely modified in order to deal with multilevelsegmentation. The network consists of an inputlayer, an output layer and at least one hidden layer(Figure 4). Each layer consists of M*N neurons, every
Figure 2: Block Diagram of Proposed System
Figure 3: Error Functions (a) Histogram of the Panda Image (b)Partition Found by FCM. (c) Fuzzy Entropy [(8)]. (d) Linear
In our study, the FCM algorithm was employedto create a fuzzy partition that properly describesthe image, using only the pixel intensity feature.Other clustering algorithms might be used as well,but because that in the case of 1-D data the shape ofthe cluster boundaries is of no importance, variationsof the objective function minimized by the algorithm(such as Fuzzy-Shells or the more general Gustafson-
36 Shweta Lawanya Rao and C.L. Chandrakar
neuron corresponding to an image pixel. Eachneuron in one layer is only connected to thecorresponding neuron in the previous layer and theneurons in its d-th order neighborhood (Figure 5).
0
211 1( )/
2
( ) [ ( * )1
( * )]
k
k kk kx
k
k
y yf x y X u x y d
e
u x y d
(11)
where
u step functions;
k thresholds;yk target level of each signoid, will constitute
the system’s labels;
0 steepness parameter;d size of the neighborhood, as defined in the
Previous sectionThe thresholds and the target values are obtained
from the error function, as the graylevels with themaximal and with minimal levels of fuzzinessrespectively. Because the range of the neuron inputlevels depends on the number of neurons in theprevious layer to which it is connected (the size ofthe neighborhood), the threshold values are adaptedto reflect this dependency (by multiplying them by,the number of input links).
4. Training: The back-propagation algorithm isemployed fortraining. The weights are updated asfollows:
output layer
other layers
ji
j j
ji
k ikj ik
k k j
oEo
o Iw
o oEu o
o I I
where
Ii total input to the ith neuron;wji weight of link from neuron i in one layer to
neuron j in the next layer;oi output of the ith neuron in the previous
layer;E error in the network’s output (relative to the
desired target image);learning rate
Fuzziness measure/Error function: The errorfunction defined at the first stage of the system isevaluated for the image output at each trainingepoch. As discussed before, the aim of the networkis to reduce the degree of fuzziness of the inputimage.
Figure 5: Neighborhood of a Pixel (a) First Order Neighborhood;(b) Second Order Neighborhood; (c) Sequence of Neighborhoods
Figure 4: Network Architecture
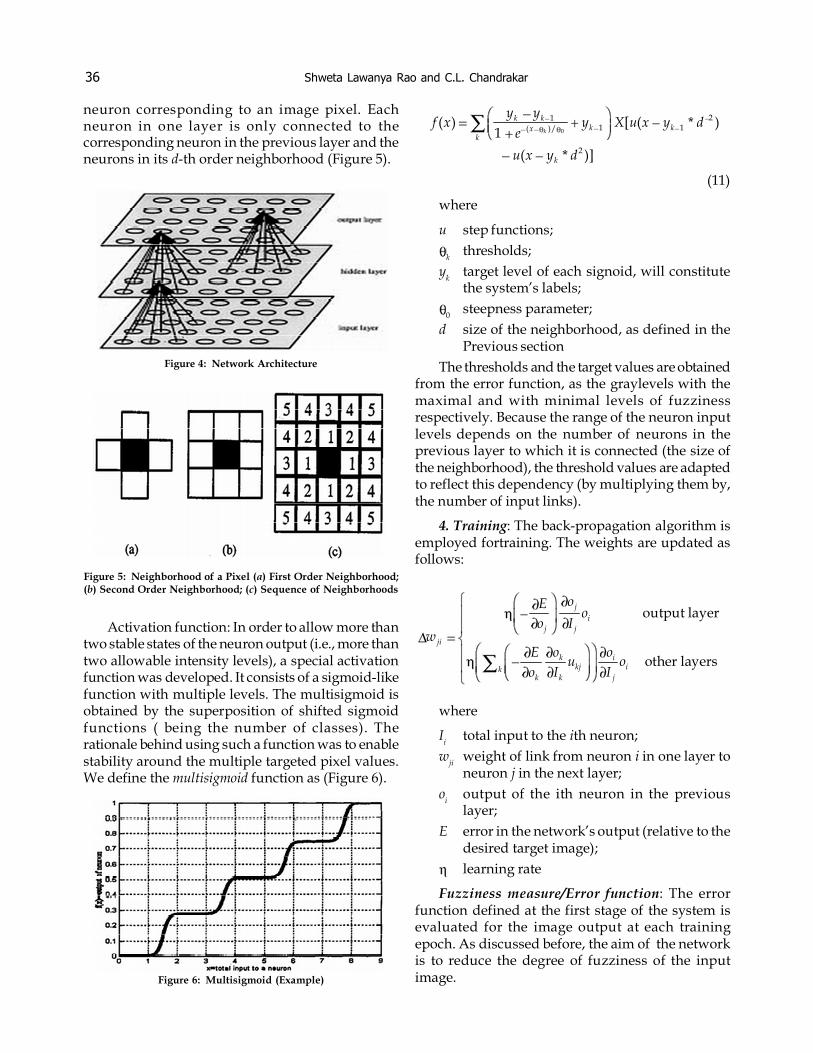
Activation function: In order to allow more thantwo stable states of the neuron output (i.e., more thantwo allowable intensity levels), a special activationfunction was developed. It consists of a sigmoid-likefunction with multiple levels. The multisigmoid isobtained by the superposition of shifted sigmoidfunctions ( being the number of classes). Therationale behind using such a function was to enablestability around the multiple targeted pixel values.We define the multisigmoid function as (Figure 6).
Figure 6: Multisigmoid (Example)

An Adaptive Neuro-Fuzzy System for Automatic Image Segmentation and Edge Detection 37
Defuzzification: As it should be understoodfrom the descriptions of the neural network, it is“working” directly on the graylevel values, and noton their fuzzy membership values, as would be thecase in a usual fuzzy image processing algorithm.
In other words, the network does not change thefuzzy membership values of the pixels in order toreduce the error. Instead, it changes the initial pixelvalues to values that will decrease the amount offuzziness, according to the initial fuzzy partition.Thus, the output of the neural network is initiallyobtained in terms of graylevels, which are then“fuzzyfied” in order to determine the error. In theideal case when the network converges with no errorat all, the outputs have only values who'smembership values are “1” or “0,” defuzzificationis not necessary. When the network does notconverge completely (whether stopped intentionallyor not), the fuzzification of the output image doesnot result in merely crisp membership values. Theinformation about the membership values of thepixels might be useful for further processing,depending on the application at hand. If crisplabeling is required, a defuzzification stage must beadded. For display purposes, the simplestdefuzzification method is thresholding the fuzzypartition, so that each pixel is uniquely assigned tothe class in which it has the highest membershipvalue. After being assigned to a single class, thepixels can be labeled either with the value of theprototype of their class, or with the value of theprototype weighted by the membership values ofthe pixels in their class (thus preserving some of the“fuzzy” information).
Edge Detection (Block C)
The edge detection subsystem was added during theresearch in order to investigate the possibility toexploit the fuzzy entropy information for otherapplications. This subsystem is based on theassumption that the edge pixels have the mostambiguous values in the image, i.e., they give thelargest contribution to the fuzzy entropy of theoutput image at each iteration. Thus,these pixels arethose that undergo the greatest changes during thetraining/tuning of the system. Here, the edge imageis obtained by monitoring the changes that take placein the pixels’values between two consecutiveiterations and integrating these changes over thewhole training period.
3. EXPECTED OUTPUT
Segmentation Output-
The comparison between the segmented imageobtained by means of the proposed system and someother algorithms is shown in Figure 7. Figure 7(c).shows the results of hard-thresholding the imageusing the thresholds determined by the FCMalgorithm. Figures 7(d)(f) show the results producedby three algorithms available in the Khorosenvironment. It can be observedthat the proposedsystem produces much smoother results (less "noisy"regions), which is a desirable feature, even at theprice of loosing some information. The regiongrowing algorithm used here, which might not bethe best one of it's kind, produced a clearly inferiorresult in this case, because it gives different labels toseparated (nonconvex) regions even if they are ofthe same kind. Note that due to the good behavior(well defined clusters) of the example, the resultsobtained by using the FCM algorithm (Figure 7(c))and the (Hard) -Means algorithm are almost thesame (only a few pixels differ).
(a) Original Image (b) Proposed Algorithm
(c) Histogram clustering (PCM) (d) Histogram clustering (median cut)
(f) Region growing(e) Histogram clustering (K-Means)
Figure 7: Segmentation Results and Comparison
3 × 3 5 × 5 7 × 7
Figure 8: Effects of Increasing the Size of the Neighborhood
Figure 9: Noise Immunity

38 Shweta Lawanya Rao and C.L. Chandrakar
Figure 8 shows the effects of increasing the sizeof the neighborhood. It can be seen that as theneighborhood is increased, better smoothing isobtained, but more detailed information is lost. As aconclusion, when dealing with noisy images the useof a larger neighborhood size is desirable. Otherwise,smallerneighborhoods should be used to obtainmore detail. Other parameters,like the type of errorfunction used (partition entropy,linear index offuzziness, etc.) and the steepness factor of themultisigmoid activation function did not show anysignificant influence on the outcome of thesegmentation algorithm (they do influence the rateof convergence. The proposed system was found tobe robust to some real life ‘complications’ like theaddition of noise, and changing illuminationconditions. For example, Figure 9 shows thesegmentation results of some quite heavily noisedversions of the Panda image. Figure 10 shows adarkened version of the Panda image, its Histogramand the segmented image.
4. CONCLUSION
An adaptive system for the automatic segmentationof intensity level images was presented in this paper.In order to achieve the ability to robustly performacross the wide diversity of images encountered inreal world applications, resemblance to the humanvisual system was sought during the design of thesystem. The “heart” of the proposed system, theneural network that performs the adaptivethresholding, is biologically inspired (beyond thesimple modeling of artificial neurons): Thepyramidal averaging effect, which is a result of itsspecial architecture, is a known feature of the humanvisual system; also, the learning process based onthe minimization of the fuzzy entropy function is akind of relaxation process, which is typical ofphysical systems. The FCM algorithm, used todetermine the thresholds and the error function, wasdesigned based on human heuristics of what a“good” partition should be like. Although our aimwas to concentrate on the research of the conceptsdescribed above rather than to achieve optimalsegmentation results, the results we obtained arecomparable with those of other known methods andsometimes/from certain points of view might evenoutperform them. In addition, the proposed systemhas the advantage that it does not require any humanexpert intervention, nor any a priori informationabout the input image.
In this study, minimization of an image’s fuzzyentropy was employed as the target of an MLPneural network’s training, thus transforming it intoan unsupervised training scheme. Obtaining imagesegmentation by means of reducing the (fuzzy)entropy of the image can be argued “philoso-phically” considering both the physical and theinformation theory significance of “entropy”. Thesegmentation process may be regarded as one that
Figure 10: Invariance with Illumination Conditions
Edge Detection Results
The edge detection subsystem was found to performpoorly compared to some of the better edge detectionalgorithms existing today, sometimes even worsethan the classical, gradient type edge detectors(Prewitt, Sobel, etc.). Yet, the results are good enoughto prove the point that the process of fuzzy entropyminimization does provide information about the‘edginess’ of the pixels in an image, in addition tothe segmentation. Furthermore, the algorithmproposed here has the advantage of being totallyautomatic. Also, some typical post-processing (likeedge linking) might enhance its performance. Figure11 shows the results of the edge detection subsystemapplied to the Panda image.,compared to the resultsof the (thresholded) Sobel operator and of theoptimal Difference Recursive Filter (DRF) for edgedetection algorithm. This filter, proposed by Shenand Castan [33], is an optimal smoothing filter(symmetric exponential filter of infinitely largewindow size) based on a one step model (a step edgeand the white noise) and the multi-edge model.
Figure 11: Edge Detection Results (a) Original Image (b)Proposed Algorithm (c) DRF (d) Sobel (Thresholded)

An Adaptive Neuro-Fuzzy System for Automatic Image Segmentation and Edge Detection 39
reduces the uncertainty in the image (about thebelonging of pixels to objects), as well as one thatresults in gain of information (about the structure ofthe image). In addition to using fuzzy entropy as ameasure of the error of the segmentation system, thisreasoning also led to its use as a criterion fordetermining potential edge pixels (here it might beinteresting to mention the fact that the segmentationand edge detection operations are complementaryaspects of the object extraction problem). It wasfound that some of the “classical” cluster validitymeasures can be relied upon in some cases (e.g.,industrial applications) to automatically choose thenumber of clusters (segments) that appear in theimage. The system provided good results whentested on noisy images (different types of noise withlow SNR were tested) and under changingillumination conditions. Convergence of theadaptive thresholding system was not provenanalytically, but it was found experimentally in allthe (over 100) test cases. The research issues/directions that might provide the greatest benefit are:
• Experimenting with clustering algorithmsother than the FCM algorithm, in order tofind one that can detect ‘small’ clusters (theFCM algorithm tends to form partitionswhere the number of data points in all theclusters is similar). Figure 12. No captionneeded.
• Working with more features at the differentprocessing stages (data fusion). The labelchoosing system (i.e., the clusteringalgorithm) can be easily adapted to deal withmore features, but in the case of the neuralnetwork the implementation of this task isless trivial. In this latter case, some changesto the network architecture are probablyrequired (like linking multiple weights inparallel between the neurons, one for eachfeature), besides adapting the activation andthe error functions. Of most importance arethe inclusions of color information (RGB,HUV, etc.) and of local features (gradientvalue, mean local value, etc.).
• Conduct multi-resolution analysis (look forsegments at different resolutions) eitherselecting an optimal global or local windowsizes or by integrating the results obtainedat different resolutions.
• Further research on validity andconvergence of the segmentation system,especially in difficult real-life images suchas Figure 12.
REFERENCES
[1] B. Jahne, “Digital Image Processing”, 2nd ed. NewYork: Springer-Verlag, 1993.
[2] K. Jain, “Fundamentals of Digital Image Processing”.Upper SaddleRiver, NJ: Prentice Hall, 1989.
[3] A. Rosenfeld and A. Kak, “Digital Picture Processing”.New York: Academic,1982, Vol. 2.
[4] N.R. Pal and S.K. Pal, “A Review on ImageSegmentation Techniques”, Pattern Recog., 26, pp.1277-1294, 1993.
[5] B. Kosko, “Neural Networks for Signal Processing”.Upper SaddleRiver, NJ: Prentice-Hall, 1992.
[6] B.J. Krose and P. van der Smagt, “An Introduction toNeural Networks, 5th ed. Amsterdam, TheNetherlands: Univ. of Amsterdam, 1993.
[7] T. Kohonen, Self-Organization and AssociativeMemory. New York:Springer-Verlag, 1989.
[8] R.O. Duda and P.E. Hart, “Pattern Classification andScene Analysis. New York: Wiley, 1973.
[9] A. Ghosh, N.R. Pal, and S.K. Pal, “Self-organizationfor Object Extractionusing a Multilayer NeuralNetwork and Fuzziness Measures”, IEEETrans. FuzzySyst., 1, pp. 54-69, Feb. 1993.
[10] A. Ghosh, “Use of Fuzziness Measures in LayeredNetworks for Object Extraction: A Generalization”,Fuzzy Sets Syst., 72, pp. 331-348, 1995.
[11] L.O. Hall, A. Bensaid, L. Clarke, R. Velthuizen, M.Silbiger, and J. Bezdek, “A Comparison of NeuralNetwork and Fuzzy Clustering Techniques inSegmenting Magnetic Resonance Images of theBrain”, IEEE Trans. Neural Networks, 3, pp. 672-682,Sept. 1992.
[12] J.C. Bezdek, L.O. Hall, and L.P. Clarke, “Review ofMR Image Segmentation Techniques Using PatternRecognition”, Med. Phys., 20, pp. 1033-1048, 1993.
[13] N. Pal, J. Bezdek, and E. Tsao, “Generalized ClusteringNetworks and Kohonen’s Self-organizing Ccheme”,IEEE Trans. Neural Networks, 4, pp. 549-557, July 1993.262 IEEE Transactions on Fuzzy Systems, 10(2), April2002.
[14] G. Carpenter and S. Grossberg, “A Massively ParallelArchitecture for a Self-organizing Neural PatternRecognition Machine”, Comp. Vision Graph. ImageProcess, 37, pp. 54-115, 1987.
Figure 12: No Caption Neede
40 Shweta Lawanya Rao and C.L. Chandrakar
[15] S. Hidemoto and J. Toriwaki, “AutomaticSegmentation of Head MRI Images by KnowledgeGuided Thresholding”, Comp. Med. Imag. Graph., 15,pp. 233-240, 1991.
[16] S.G. Romaniuk and L.O. Hall, “Dynamic NeuralNetworks with the Use of Divide and Conquer”, Proc.IEEE Int. Joint Conf. Neural Networks, 1, pp. 658-663,1992.
[17] H.R. Tizhoosh, “Fuzzy Image Processing”. Berlin,Germany: Springer-Verlag, 1997. in German.
[18] J.C. Bezdek and S.K. Pal, Eds., “Fuzzy Models forPattern Recognition”. New York: IEEE Press, 1992.
[19] A.M. Bensaid, L.O. Hall, and J.C. Bezdek et al.,“Validity-guided (Re)Clustering with Applications toImage Segmentation”, IEEE Trans. Fuzzy Syst., 4, pp.113-123, 1996.
[20] Y.A. Tolias and S.M. Panas, “Image Segmentation bya Fuzzy Clustering Algorithm Using AdaptiveSpatially Constrained Membership Functions”, IEEETrans. Syst., Man, Cybern. A, 28, pp. 359-369, May 1998.
[21] R. Krishnapuram and J.M. Keller, “A PossibilisticApproach to Clustering”, IEEE Trans. Fuzzy Syst., 1,pp. 98-110, May 1993.
[22] S. Di Zenzo, L. Cinque, and S. Levialdi, “ImageThresholding Using Fuzzy Entropies”, IEEE Trans.Syst., Man, Cybern. Part B, 28, pp. 15-23, Feb. 1998.
[23] N.R. Pal and S.K. Pal, “Object-backgroundSegmentation Using New Definitions of Entropy”, inProc. Inst. Elec. Eng., 136, 1989, pp. 284-295.
[24] H.D. Cheng, C.H. Chen, H.H. Chiu, and H. Xu,“Fuzzy Homogeneity Approach to MultilevelThresholding”, IEEE Trans. Image Processing, 7, pp.1084-1086, July 1998.
[25] J.C. Bezdek, E.C.K. Tsao, and N.R. Pal, “FuzzyKohonen Clustering Networks”, in Proc. Int. Conf.Fuzzy Systems, San Diego, CA, 1992, pp. 1035-1043.
[26] J.P. Davis, T.M. Warms, and W.R. Winters, “A NeuralNet Implementation of the Fuzzy c-means ClusteringAlgorithm”, Proc. IEEE Int. Joint Conf. Neural Networks,pp. A-953, 1991.
[27] J.S. Lin, K.S. Cheng, and C.W. Mao, “MultispectralMagnetic Resonance Images Segmentation UsingFuzzy Hopfield Neural Network”, Int. J. Bio. Med.Comp., 42, pp. 205-214, 1996.
[28] J.C. Bezdek, “Pattern Recognition with FuzzyObjective Function Algorithms”. New York: PlenumPress, 1981.
[29] A. De Luca and S. Termini, “A Definition of NonProbabilistic Entropy in the Setting of Fuzzy SetTheory”, Inform. Control, 20, pp. 301-312, 1972.
[30] B. Kosko, “Fuzzy Entropy and Conditioning”, Inform.Sci., 40, pp. 165-174, 1986.
[31] R.R. Yager, “On the Measure of Fuzziness andNegation Part I: Membership in the Unit Interval”,Int. J. Gen. Syst., 5, pp. 221-229, 1979.
[32] R.P. Lippmann, “An Introduction to Computing withNeural Nets”, IEEE ASSP Mag., pp. 4-22, 1987.
[33] J. Shen and S. Castan, “Edge Detection Based on Multi-edge Models”, in Proc. SPIE, Cannes, France, 1987, pp.46-53.
[34] V. Boskovitz and H. Guterman, “Neuro-fuzzy Systemfor Adaptive Multilevel Image Segmentation”, Proc.19th IEEE Conf. EE Engineers Israel, pp. 208-211, 1996.
[35] “Self-tuning Object Extraction for Online Monitoringof Biotechnological Processes”, in Proc. Int. Conf. FuzzyLogic Application, Zichron- Yaakov, Israel, 1997, pp.174-182.
[36] “Edge Detection and Image Segmentation: Two Sidesof the Same Coin”, Proc. 6th IEEE Int. Conf. FuzzySystems, pp. 1063-1068, 1997.