advances in surface penetrating technologies for …web.eecs.umich.edu/~aey/phd/marbles.pdf ·...
TRANSCRIPT

Advances in Surface PenetratingTechnologies for Imaging, Detection,
and Classification
FinalDefense
Jay A. Marble
Committee: Alfred Hero (co-chair)Andrew Yagle (co-chair)Eric MichielssenMahta Moghaddam

Surface Penetrating TechnologiesProblem Statement
l General Problem – Objects of interest in an unknown, inhomogeneous media.
l The ultimate goal is to detect and identify the objects of interest while ignoring the clutter.
l The scope of the problem rangesfrom initial object imaging,to detection, to final classification.
l Classification also includes thescheduling of confirmation sensors.
Free Space
Inner Region 1Inner Region 2
OuterSurface
InnerSurface
Objectof Interest
Objectof
InterestClutter
Clutter
Clutter
Clutter
Clutter
Free Space
Inner Region 1Inner Region 2
OuterSurface
InnerSurface
Objectof Interest
Objectof
InterestClutter
Clutter
Clutter
Clutter
Clutter
SpecializedConfirmation Sensor
LargeAreaScanner
TransmitReceivePair

l Landmine/UXO Detectionl Ground Penetrating Radar imaging.l Detect and discriminate between landmines and
various clutter objects.l Sensor scheduling of confirmation sensors.
l See-Through-Wall Radar Imagingl Provide authorities with accurate information
concerning building interiors.l This can include: hidden weapons, building layouts,
suspicious person tracking, methamphetamine labs.l Sensor scheduling for adaptive imaging.
Applications

NOT Landmine
Landmine
Discriminate between landmines andother objects using multiple sensors.
ApplicationsLandmine Detection/Classification

ApplicationsSee-Through-Wall Imaging
l Problems of InterestLayout Mapping of Inner WallsCache DetectionSuspicious Person Tracking
l Technical ChallengesInhomogeneous Medium
Causes multipath scattering - ghostsUnknown phase delays through
wall - blurring.Walls may be metal reinforced.
E&M Penetration difficult.Requires higher frequencies,which attenuate faster.

l Non-statistical MethodsSNR EnhancementRadar and Metal Detectors for
Landmine Detection
l Statistical Methods Landmine Scanning Sensors Sensor Scheduling of Landmine
Confirmation Sensors
l Imaging Sensor Scheduling of STW Radar Near Real Time STW and Landmine
Radar Imaging – 2D and 3D
Contribution Areas

Non-statistical Methodsof Signal-to-Noise Ratio Enhancement

l SNR Enhancement of GPR Signalsl Hyperbola Flattening Transforml Makes use of the un-imaged point spread function of
radar echoes from landmines.
l Metal Detector Signal Processingl Electromagnetic Induction (EMI) Sensorsl Utilize a dipole response model to identify basis functions. l Form subspace filters to enhance SNR and identify
object depth and rudimentary shape.
l Vision System Methodsl Generate a focused image of the landmine.l Draw a bounding box around the object to
extract size and depth info.
Non-statistical Methods

Radar SNR Enhancement
Plastic Landmine (VS1.6)SurfaceTop ofMine at 6”SoilStratum
l Deeply buried plastic landmines face a low signal-to-noise ratio (SNR).
l Strata in the ground can create large radar returns that lead to false alarms.
l The Hyperbolic Flattening Transform seeks to exploit all the “energy” of the hyperbolic signature.
The Hyperbola Flattening Transform
Depth into G
round
Vehicle Motion

Simulation Simulation
Original Hyperbola 45° RotationSimulation Simulation
Radar SNR EnhancementHyperbola Flattening Transform
Remapping:1/yy
12
2
2
2
=−ax
dy 1=xy 1=
yx
The Hyperbola Flattening Transform converts a hyperbolicsignature into a straight line at 45°.

Application to Simulated Data
The RADON transform creates “projections” bysumming along lines.
Projections are orientedfor 0° to 180°.
Radon Transform of the “flattened” hyperbola has a
strong maximum at 45°corresponding to the “energy” contained in the hyperbola.

Transform Location ofHyperbolic Signature
Application to Real Data

VS1.6
Along Track
The HFT will now beapplied as a detector.
A small kernel is movedthroughout the scene. Ateach location, the HFT isapplied.,
At each point the HFT is run for several values of the “a” parameter. Themaximum result is placedinto a detection image.
Original Image
Application to Real Data

VS1.6
The HFT is applied to alllocations in the scene. The detection image shownhere is the result.
Bright pixels correspond to hyperbolas. Hyperbolicsignatures have been contrast enhanced, whilenon-hyperbolas are suppressed.Along Track
Hyperbola Detection Image
Application to Real Data

VS1.6
Along Track
Pixels that break a certainthreshold are shown.These pixels reveal thelocations of the “most hyperbola-like” signalsin the scene.
The region corresponding to the VS1.6 has been enhanced by the HFTdetector.
Hyperbola-like Regions
Application to Real Data
l Marble,J., Yagle,A., “The Hyperbola Flattening Transform,” SPIE: Detection and Remediation Technologies for Mines and Minelike Targets IX, April 2004,Orlando, FL.
l Marble,J., Yagle,A., “Measuring Landmine Size and Burial Depth with Ground Penetrating Radar,” SPIE: Detection and Remediation Technologies for Mines and Minelike Targets IX, April 2004, Orlando, FL.
l Marble,J.,Yagle,A., Wakefield,G, “Physics Derived Basis Pursuit in BuriedObject Identification using EMI Sensors,” SPIE: Detection and RemediationTechnologies for Mines and Minelike Targets X, March 2005, Orlando, FL.
Non-statisticalContributions

Statistical Methodsof Landmine Detection
and Classification

l Multimodal Landmine Detectionl Scanning Sensor Algorithml Joint Probability Densities of Two Sensors l Maximum A Posteriori (MAP) Detection/Classification
l Single Confirmation Sensor Schedulingl Information Gain Metric – Rényi Divergencel Deploy Sensor that Provides Greatest Information Gain
l Multiple Confirmation Sensor Schedulingl Collaboration with GATech and Doron Blattl Develop an optimal policy for deploying multiple
sensors. l Reinforcement learning method used for training.
Statistical Methods

Scanning Sensor Observations
GPR Sensor
EMI Sensor
CurrentScanLine
PlatformMotion
Sensor Arrays
GPREMI Platform
Motion
Sensor Arrays
GPREMI
Platform

Location of Objects
100 200 300 400 500 600 700 800 900 1000
10
20
DeepMidShallow
GPR Sensor
100 200 300 400 500 600 700 800 900 1000
10
20
EMI Sensor
100 200 300 400 500 600 700 800 900 1000
10
20
EMI Acquired “Image”
GPR Acquired “Image”
Ground Truth Markings
Metal Landmines OnlySoil Type: Clay
Multimodal Landmine Detection
X =1,10
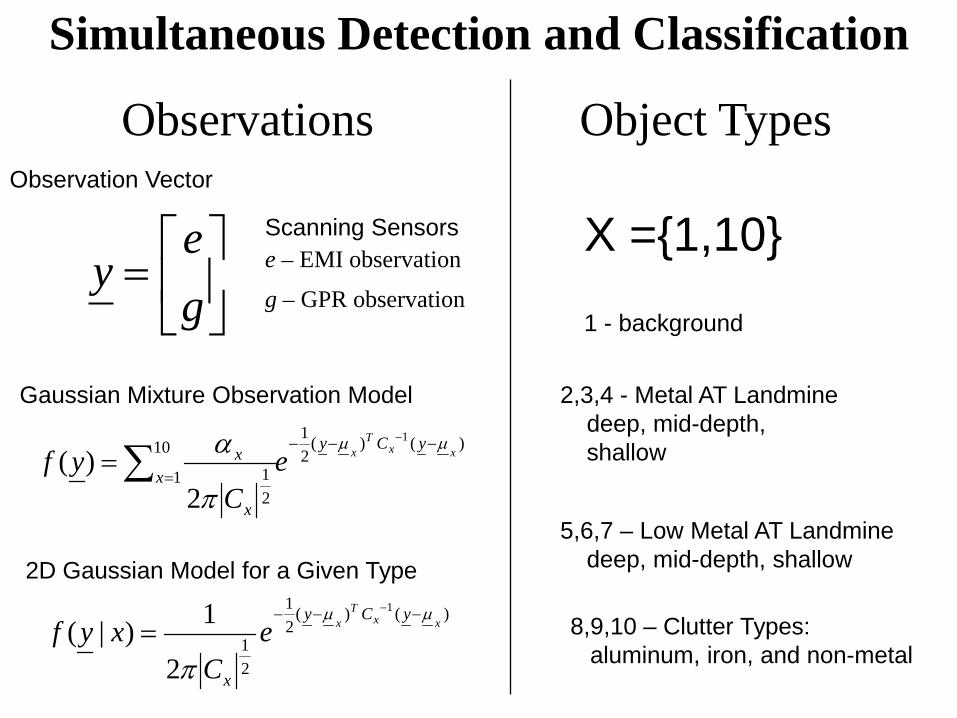
2,3,4 - Metal AT Landminedeep, mid-depth,shallow
5,6,7 – Low Metal AT Landminedeep, mid-depth, shallow
1 - background
8,9,10 – Clutter Types:aluminum, iron, and non-metal
Observations
=
ge
yScanning Sensors
)()(21
10
121
1
2)( xx
Tx yCy
x
x
x eC
yfµµ
π
α −−−
=
−
∑=
Object Types
)()(21
21
1
2
1)|( xxT
x yCy
x
eC
xyfµµ
π
−−− −
=
e – EMI observation
g – GPR observation
Gaussian Mixture Observation Model
Observation Vector
2D Gaussian Model for a Given Type
Simultaneous Detection and Classification

l Supervised Learningl
l From available data the joint PDF of eachobject type is determined.
l Bayes Rule
l
l From the learned distribution we use Bayes rule to translateto the posterior distribution.
l Maximum A Posteriori Detection/Classification
)()(21
21
1
2
1)|( xxT
x yCy
x
eC
xyfµµ
π
−−− −
=
)]|([maxargˆ yxfx x=
)()()|(
)|(yf
xfxyfyxf =
Note: This approach is the same as multiple hypothesis testing on every pixel.
Simultaneous Detection and Classification

• Metal Landmine Composite PDF• The statistics of metal landmines
are favorable for good detectionperformance.
• A similar PDF could be generated for plastic landmines. However,the situation is much less favorable.
• Background pixel PDF showsdecorrelation between EMIand GPR pixel values.
• This decorrelation makes sensor fusion very useful for false-alarmelimination.
EMI Pixel Value
GP
R P
ixel
Val
ue
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
MetalLandmines
Background“Noise”
Shallow AT
Mid-depth ATDeep AT
Joint Probability Densities
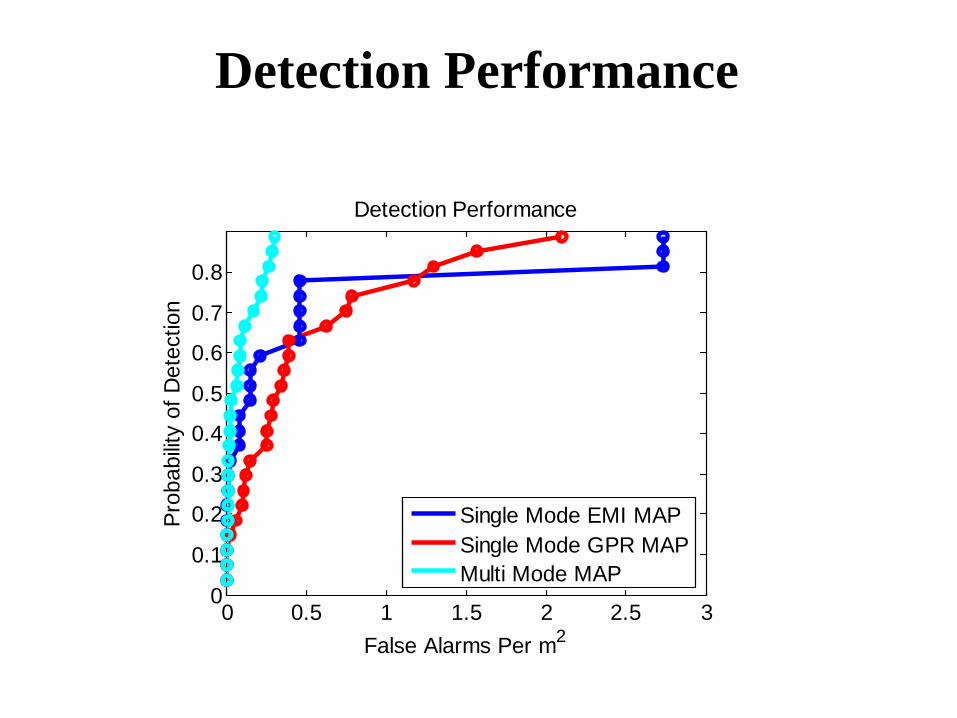
Detection Performance
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
False Alarms Per m2
Prob
abilit
y of
Det
ectio
n
Detection Performance
Single Mode EMI MAPSingle Mode GPR MAPMulti Mode MAP

Sensor Scheduling
PlatformMotion
Sensor Arrays
GPREMI Platform
Motion
Sensor Arrays
GPREMI
Platform ScanningSensors
DeployableConfirmationSensor
Other AvailableConfirmation Sensors
Possible Confirmation Sensors:
• E&M: Nuclear Quadrupole Resonance, Magnetometer, Broadband EMI
• Nuclear: X-ray Backscatter, Neutron Excitation
• Other: Chemical “Sniffer”, Acoustic Vibrometer, Mechanical Prodder

l Multiple Landmine Responsesl Four Generic Landmine Classes:
l Environment Impacts Response: Soil Permittivity and Conductivityl Object Depth Impacts Response
l Multiple Landmine Technologiesl Non-exhaustive List: Metal Detectors, RADAR , Magnetometers,
Radiometers, Seismic/Acoustic Vibrometers, Chemical Sensors, Quadrapole Resonance, Touch Probes…
l Each sensor responds differently to landmine types and is impacteddifferently by depth and environment.
l Some sensors are practical in a “scanning” context while other are only practical as “confirmation” sensors.
l Low-metal Anti-Tank l High-metal Anti-Tank
l Low-metal Anti-Personnell High-metal Anti-Personnel
Sensor SchedulingMotivation

Location of Objects 2
200 400 600 800 1000 1200 1400 1600 1800
5
10
15
Location of Objects
200 400 600 800 1000 1200 1400 1600 1800
5
10
15
deep deepmid
shallowmid
shallow
aluminumiron
non-metalmetal mines plastic mines Clutter
Scanning Sensor SimulationsSimulated scanning sensors are used to make the scanning process
realistic. It also gives experimental control over all system parameters and environmental parameters.
Clutter objects (iron, aluminum, and non-metal) have been introduced to study false alarm rejection capabilities of algorithms.

EMI Sensor Simulation
200 400 600 800 1000 1200 1400 1600 1800
5
10
15
GPR Sensor Simulation
200 400 600 800 1000 1200 1400 1600 1800
5
10
15
Sensor N
umber
Sensor N
umber
VehicleMotion
Sample Number
Sample Number
Metal Detector
Ground Penetrating Radar
Scanning Sensor Simulations

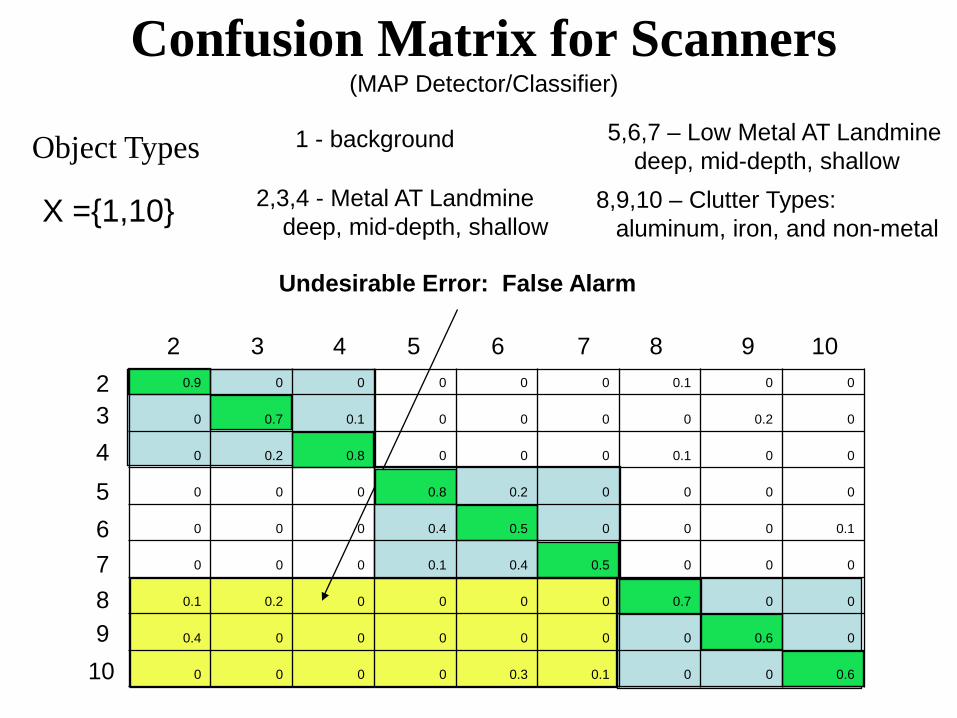
Confusion Matrix for Scanners(MAP Detector/Classifier)
X =1,10 2,3,4 - Metal AT Landminedeep, mid-depth, shallow
5,6,7 – Low Metal AT Landminedeep, mid-depth, shallow
1 - background
8,9,10 – Clutter Types:aluminum, iron, and non-metal
Object Types
2
56789
10
43
2 5 6 7 8 9 10430.9 0 0 0 0 0 0.1 0 0
0 0.7 0.1 0 0 0 0 0.2 0
0 0.2 0.8 0 0 0 0.1 0 0
0 0 0 0.8 0.2 0 0 0 0
0 0 0 0.4 0.5 0 0 0 0.1
0 0 0 0.1 0.4 0.5 0 0 0
0.1 0.2 0 0 0 0 0.7 0 0
0.4 0 0 0 0 0 0 0.6 0
0 0 0 0 0.3 0.1 0 0 0.6
Each Row Should Sum to One

2
56789
10
43
2 5 6 7 8 9 1043
X =1,10 2,3,4 - Metal AT Landminedeep, mid-depth, shallow
5,6,7 – Low Metal AT Landminedeep, mid-depth, shallow
1 - background
8,9,10 – Clutter Types:aluminum, iron, and non-metal
Object Types
Catastrophic Error: Missed Landmine
0.9 0 0 0 0 0 0.1 0 0
0 0.7 0.1 0 0 0 0 0.2 0
0 0.2 0.8 0 0 0 0.1 0 0
0 0 0 0.8 0.2 0 0 0 0
0 0 0 0.4 0.5 0 0 0 0.1
0 0 0 0.1 0.4 0.5 0 0 0
0.1 0.2 0 0 0 0 0.7 0 0
0.4 0 0 0 0 0 0 0.6 0
0 0 0 0 0.3 0.1 0 0 0.6
Confusion Matrix for Scanners(MAP Detector/Classifier)
2
56789
10
43
2 5 6 7 8 9 1043
X =1,10 2,3,4 - Metal AT Landminedeep, mid-depth, shallow
5,6,7 – Low Metal AT Landminedeep, mid-depth, shallow
1 - background
8,9,10 – Clutter Types:aluminum, iron, and non-metal
Object Types
Undesirable Error: False Alarm
0.9 0 0 0 0 0 0.1 0 0
0 0.7 0.1 0 0 0 0 0.2 0
0 0.2 0.8 0 0 0 0.1 0 0
0 0 0 0.8 0.2 0 0 0 0
0 0 0 0.4 0.5 0 0 0 0.1
0 0 0 0.1 0.4 0.5 0 0 0
0.1 0.2 0 0 0 0 0.7 0 0
0.4 0 0 0 0 0 0 0.6 0
0 0 0 0 0.3 0.1 0 0 0.6
Confusion Matrix for Scanners(MAP Detector/Classifier)

l Sensor Modelsl
l ya is the observation to be made by deploying Sensor aagainst Object x.
l Performance Predictions
l Let:
l From the sensor response distributions we use Baye’s Rule to translate to the expected posterior distribution for eachobject type.
l Rényi Information Gain in Discrete Form
( )2,~)|( aaa xyf σµΝ
−
= ∑ −
xa axpyxpa )|()|(ln
11maxargˆ 1 αα
α
∑=
xa
a
xyfxpxyfaxp)|()()|()|(
Confirmation Sensor Scheduling
Note: y implies allpreviously obtainedobservations.

Confirmation Sensor Statistics Assignments
1 2 3 4 5 6 7 8 9 10
0.01 4.5 5.5 6.5 1.5 1.6 1.7 4.5 9.0 1.5
0 8 8 8 2 2 2 6 6 0.5
0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25
0 9 9 9 4.5 4.5 4.5 1.5 1.5 0.75
0.75 9 6 3 9 6 3 3 3 3
0 9 9 9 9 9 9 3 3 4.5
2
56
43
1
Average for Each Object Type
2 0.5 0.5 0.5 2 2 2 0.5 0.5 2
3 1 1 1 2 2 2 1 1 3
0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25 0.25
1.25 1.25 1.25 1.25 2.25 2.25 2.25 3.25 3.25 4.25
0..75 2.25 1.25 0.75 2.25 1.25 0.75 0.75 0.75 0.75
1.25 3.25 2.25 1.25 3.25 2.25 1.25 1.25 1.25 1.25
2
56
43
1Variance for Each Object Type
Confirmation Sensor Scheduling

-100 -80 -60 -40 -20 0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Information Gain Metric - Rényi Divergence
( )dxxfxfa
ffD aa )()(ln1
1)||( 01
101−∫−
=
Original Measurement
Prediction AfterNext Measurement
PDF ofState
Confirmation Sensor Scheduling
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
Sensor 6
Sensor 2
Sensor 5EMI
GPR
EMI
GPR
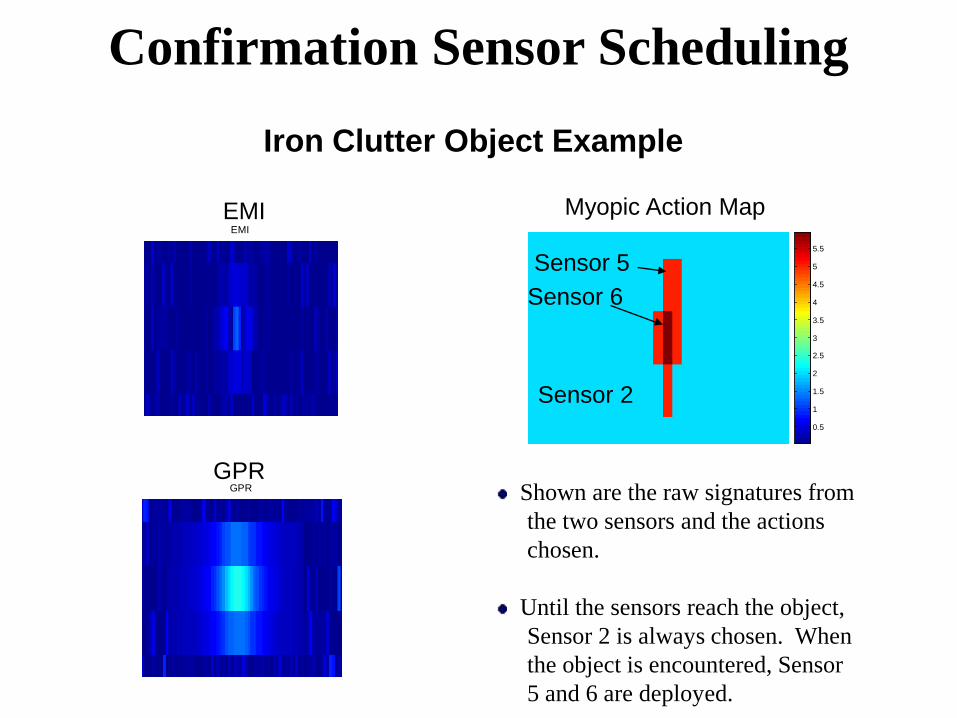
Myopic Action Map
Iron Clutter Object Example
Shown are the raw signatures fromthe two sensors and the actions chosen.
Until the sensors reach the object, Sensor 2 is always chosen. Whenthe object is encountered, Sensor5 and 6 are deployed.
Confirmation Sensor Scheduling

1 2 3 4 5 6 7 8 9 100
0.5
1
Type
Pro
babi
lity
1 2 3 4 5 6 7 8 9 100
0.5
1
Type
Pro
babi
lity
1 2 3 4 5 6 7 8 9 100
0.5
1
Type
Pro
babi
lity
Initial Scanning Mode Confirmation
Active Sensing estimates the amount of “information gain” achievable from each of the 6 confirmation sensors. Information gain is a measureof the decreased entropy of the state PDF after making an observation.
Clutter objects (iron, aluminum, and non-metal) have been introduced to study false alarm rejection capabilities of algorithms.
Confirmation Sensor SchedulingIron Clutter Object Example

Confusion Matrix after Confirmation
2
56789
10
43
2 5 6 7 8 9 1043
1 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0
0 0 0 0.7 0.3 0 0 0 0
0 0 0 0.2 0.8 0 0 0 0
0 0 0 0 0.2 0.8 0 0 0
0 0.1 0 0 0 0 0.9 0 0
0.1 0 0 0 0 0 0 0.9 0
0 0 0 0 0 0.2 0 0 0.8
X =1,10 2,3,4 - Metal AT Landminedeep, mid-depth, shallow
5,6,7 – Low Metal AT Landminedeep, mid-depth, shallow
1 - backgroundObject Types
Each Row Should Sum to One

• Sensors under development at Georgia Tech (Waymond Scott)• Data set used is the GATech “Three Sensor Dataset” (Feb.2004)
• Includes metal detector, radar, and seismic vibrometer.• Collection performed on three scenarios of mine/clutter arrangements.• Data used to guide sensor statistical simulations at U.Mich.
EMI SeismicGPR
Sensors from the Three Sensor Dataset
Downloadable Demo
Multiple Confirmation Sensor Scheduling

Optimal Policy
1D
1D
12D
123D
123D
1D
1D
1D1 – EMI
2 – GPR3 – SeismicD – Make Decision
Cltr1 – Hollow MetalCltr2 – Hollow Non-metalCltr3 – Non-hollow Non-metal
ResonanceLowLowMediumMediumMediumHighMediumMedium
Seismic
RCSLowHighHighHighMediumHighMediumHigh
DepthLowLowLowLowMediumHighMediumHigh
GPR
SizeLowLowLowMediumMediumHighHighHighSensor
ConductivityLowLowLowHighHighMediumHighHigh
EMI
DescriptionBkgCltr-3Cltr-2Cltr-1P-APP-ATM-APM-AT
Feature87654321
Object Type
Medium High
Medium Medium Medium
Low
High
Low
Low
Medium
Low
Assumptions: AT Mines Buried Deep, AP Mines Buried Very Shallow, et.al.

Always deploy three sensors
Always deploy best of two sensors: GPR + Seismic
Always deploy best single sensor: EMI
Suboptimal SM using best fixed sensor allocation
+ Optimal SM using weighted classifierreduction
Optimal sensor scheduling improves detection performance while reducing average dwell time.
Performance Comparison (Pc vs E[N])
+
+
++
+
+
+ Suboptimal SM using unweighted classifier
StatisticalContributions
l Marble,J., Blatt,D., Hero,A., ``Confirmation Sensor Scheduling using aReinforcement Learning Approach,'' SPIE: Detection and RemediationTechnologies for Mines and Minelike Targets XI, March 2006, Orlando, FL.
l Marble,J., Yagle,A., Hero,A, ``Sensor Management for Landmine Detection,''SPIE: Detection and Remediation Technologies for Mines and Minelike TargetsX, March 2005, Orlando, FL.
l Marble,J., Yagle,A., Hero,A, ``Multimodal, Adaptive Landmine Detection Using EMI and GPR,'' SPIE: Detection and Remediation Technologies for Mines and Minelike Targets X, March 2005, Orlando, FL.

ImagingSee-Through-Wall Radar
and Volumetric Landmine Imaging

l I.R.I.S. Adaptive Imagingl Iterative Redeployment of Imaging and Sensingl Adaptively build a large scene out of small aperture
radar measurements.l Use sensor scheduling to redeploy small aperture radar.
l Phase Delay Estimation and Correctionl Two methods proposed for homogeneous external walls.l The magic parameter: l Autofocus techniques required in real world system.
l Near Real Time Imaging of Large Scenesl 2D for STW and 3D for Landminel Matrix Implementation of Wavenumber Migrationl Development of a Forward Operator by “Reverse
Engineering” the Adjoint Operator
Imaging
2ετ

l SRI Sidelooking Radar
l Monostatic SARl Fully Polarimetric: HH, VV, HV
l Frequenciesl 800-2400 MHzl 301 Frequency Steps
l Antenna Height 7.5m
SRI International Building 409Menlo Park, CA
See-Through-Wall Radar Imaging

SRI International Building 409Menlo Park, CA
l SRI Sidelooking Radar
l Monostatic SARl Fully Polarimetric: HH, VV, HV
l Frequenciesl 800-2400 MHzl 301 Frequency Steps
l Antenna Height 7.5m
Azimuth, m
Ran
ge,
m
Wavefront Reconstruction
-20 -10 0 10 20
5
10
15
20
25
30
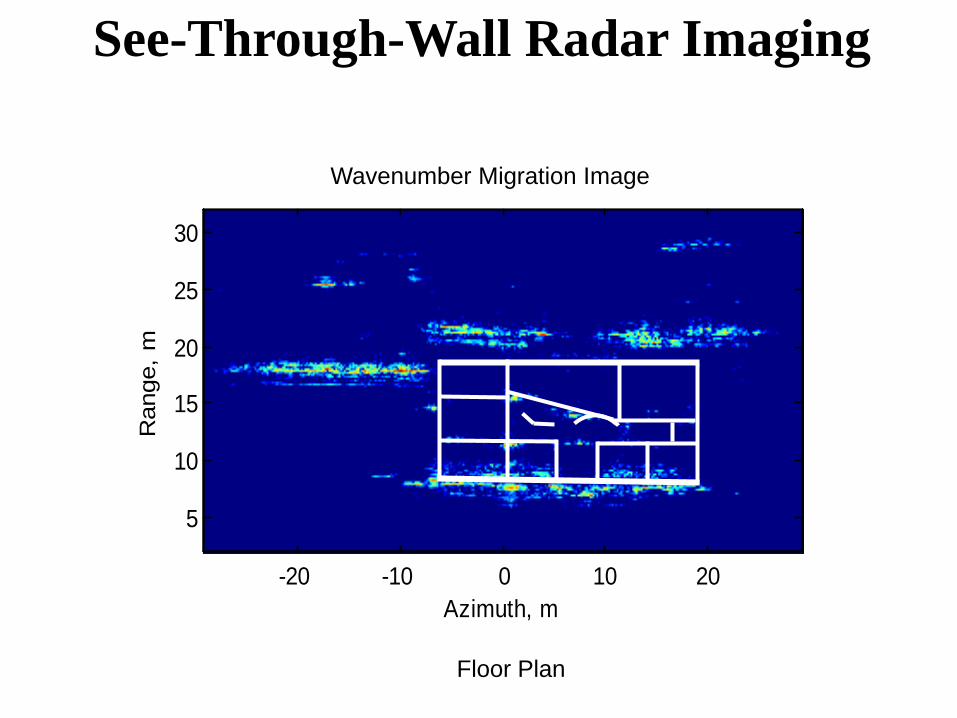
Wavenumber Migration Image
See-Through-Wall Radar Imaging
Synthetic Aperture, m
Rad
ial R
ange
, m
Filtered SAR Data
-20 -10 0 10 20
5
10
15
20
25
30
Raw Data


Azimuth, m
Ran
ge,
mWavefront Reconstruction
-20 -10 0 10 20
5
10
15
20
25
30
Wavenumber Migration Image
See-Through-Wall Radar Imaging
Azimuth, m
Ran
ge,
mWavefront Reconstruction
-20 -10 0 10 20
5
10
15
20
25
30
Wavenumber Migration Image
See-Through-Wall Radar Imaging
Floor Plan

Electric Field Energy Mapping
Down Range [m]
Cros
s Ra
nge
[m]
-25 -20 -15 -10 -5
-10
-5
0
5
10
Virtual Transmitter
Predict Information Gain(Energy or Resolution MAP)
Low Confidence Region
Uncertainty Map
Sensor IlluminationElements of the I.R.I.S. Strategy
Iterative Redeployment of Illumination and Sensing

ISAR Image
-4 -2 0 2 4
-4
-2
0
2
4
10 m
10 m10 m
10 m
Total Aperture: 40m
Observation
Dow
n R
ange
[m]
Cross Range [m]-5 0 5
-5
0
5
1
23 4
5
6
78
9
10
1112
Table
Chair
Sink
WeaponsCache
Empty Space Interior
Standard Scene
Total Aperture: 12*1m = 12m
l IRIS Simulation for Proof of Conceptl Bandwidth: 4-5GHzl Number Frequencies: 512l Aperture per side: 10ml Full Synthetic Array: 512 elementsl Subaperture Array: 50 elements
Full ISAR Image Adaptive IRIS Image
IRIS Simulation

IRIS “Modules”l Uncertainty Map – Inside Building
l The Ting Methodl The Yuan&Lin (inspired) Method
l Sensor Information Map – Outside Buildingl KL Divergence Metric (Max Info Gain)l Energy Method (Max SNR)
l Virtual Transmitterl Currently using “Enhanced Geometrical Optics”
l A high frequency approximation.l Mathematically simple and fastl Valid (and possibly only choice) at higher frequenciesl Not valid at corners
l Other Methods – Numerically Intensel All require 10 samples per (shortest) wavelengthl MoM, FEM, FDTD
l The Observationsl Simulated – Currently using Enhanced Geometrical Opticsl Real Data – Always best.
l Imagingl Sparse Reconstruction Based on Wavenumber Migrationl Other’s can be substituted based on performance characteristics.
Both Used in automated IRIS
Both Used

dtexerfx
t
t∫=−=
0
22)(π
Ting,M, Hero,A.O., “Sparse Image Reconstruction Using a Sparse Prior,” IEEE International Conference on Image Processing, Atlanta, GA, Oct. 8-11, 2006.
(Ting&Hero)
Confidence
Entropy
)(log)1()(log)( 22 pppppS −−−=
)|0( zIPp ==
Final uncertainty mapping (Map #1)
Uncertainty Map

Uncertainty Map
l Uncertainty Map shows pixels that are likely to be “empty”.
l Regions of the image that have not been viewed by the sensor are accounted forby the second Uncertainty Map. This second map isinspired by Yuan&Lin (JASA 2005).
l Note: Pixels are DirectionalMeaning that radar imagesare composed of directionalscatterers.
Most Uncertain
Region
First Iteration Map #1
Fifth Iteration Map #2

X
Dow
n R
ange [
m]
Cross Range [m]-5 0 5
-10
-5
0
5
10
Kullback Leibler Divergence – Information Gain
Virtual Transmitters
1 23
-Electric Field From Transmitter k.Observation Location
4 4.2 4.4 4.6 4.8 51
2
3
4
5
6
7
8
9 x 10-3E1 Electric Field Magnitude
Frequency [GHz]
Fiel
d St
reng
th
4 4.2 4.4 4.6 4.8 50
0.002
0.004
0.006
0.008
0.01
0.012E2 Electric Field Magnitude
Frequency [GHz]
Fiel
d St
reng
th
4 4.2 4.4 4.6 4.8 50
0.002
0.004
0.006
0.008
0.01E3 Electric Field Magnitude
Frequency [GHz]
Fiel
d St
reng
th
Div Map= Div(E1,E3)+ Div(E1,E2)
ReferenceField
HorizontalPerturbationField
VerticalPerturbationField
Div(Ek, Ej ) = log( )
Sensor Information Map

Rx
Tx
ObjectAir AirWall
Rs
Rt χ
χ’Rr
Virtual Transmitter
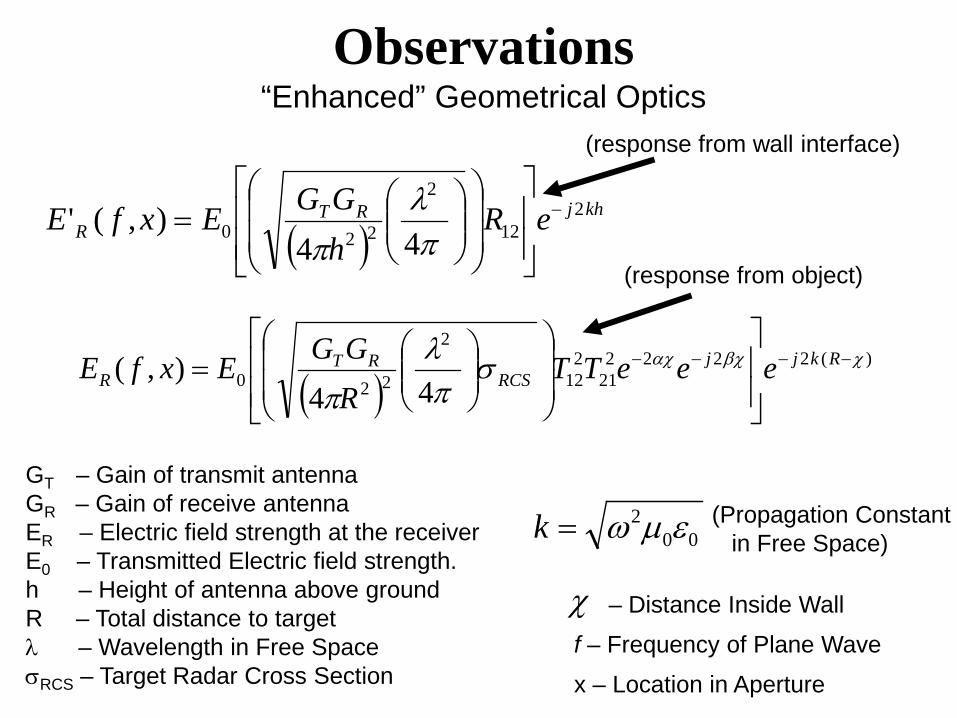
“Enhanced” Geometrical Optics
Observations

( )( ))(
2112223
2
0 4),( χβχαχσ
πλ −+−−−
= ts RRjkj
RCSts
RTR eeeTT
RRGGExfE
( )( )χβχαχ
πλ −−−−
= rRjkj
r
RTR eeeTT
RGGExfE 21122
2
0 ''4
),('
(Direct Path from Transmitter)
(response from object)
GT – Gain of transmit antennaGR – Gain of receive antennaER – Electric field strength at the receiver E0 – Transmitted Electric field strength.h – Height of antenna above groundd – Depth of target below the surfaceλ – Wavelength in Free SpaceσRCS – Target Radar Cross Section
002 εµω=k (Propagation Constant
in Free Space)
– Distance Inside Wallχ
x – Location in Aperture
f – Frequency of Plane Wave
Virtual Transmitter“Enhanced” Geometrical Optics
( ))(2222
212
12
2
220 44),( χβχαχσ
πλ
π−−−−
= Rkjj
RCSRT
R eeeTTRGGExfE
( )khjRT
R eRhGGExfE 2
12
2
220 44),(' −
=
πλ
π
(response from wall interface)
(response from object)
GT – Gain of transmit antennaGR – Gain of receive antennaER – Electric field strength at the receiver E0 – Transmitted Electric field strength.h – Height of antenna above groundR – Total distance to targetλ – Wavelength in Free SpaceσRCS – Target Radar Cross Section
002 εµω=k (Propagation Constant
in Free Space)
– Distance Inside Wallχ
x – Location in Aperture
f – Frequency of Plane Wave
Observations“Enhanced” Geometrical Optics

21
22
2
1121
−+=
ωεσµεωα
21
22
2
1121
++=
ωεσµεωβ
r
rR
ε
ε11
11
12
+
−
=
r
Tε+
=1
221
r
T
ε11
212
+=
rεµεωβ ≈Slightly
Conducting Media
Approximation
Fresnel Reflection andTransmission Coefficients
Attenuation and PropagationConstants in Conducting Media
“Enhanced” Geometrical Optics
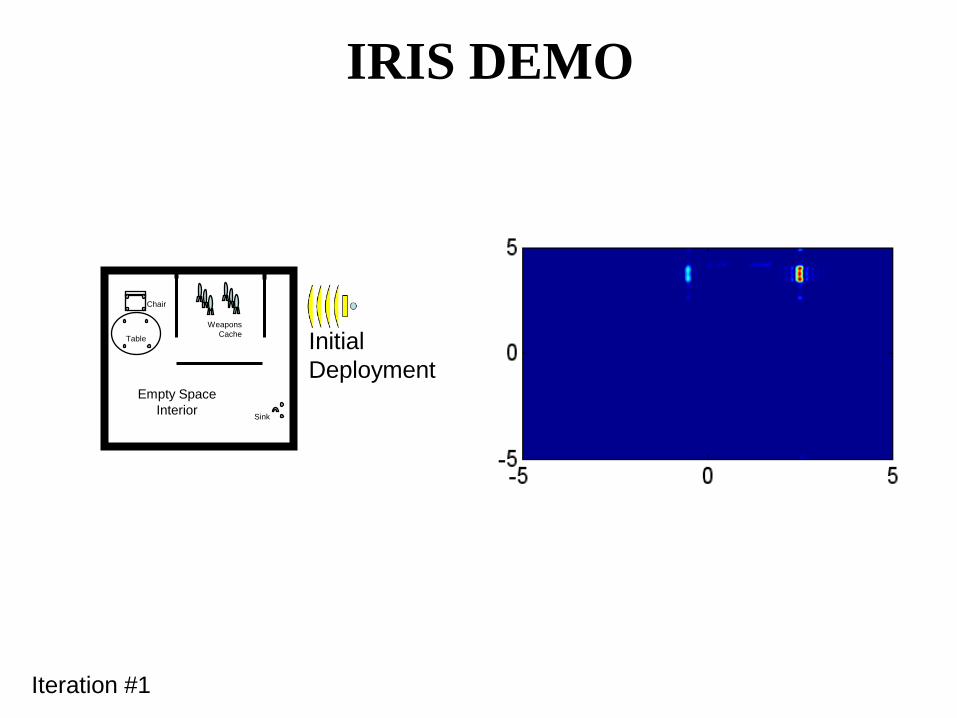
Table
Chair
Sink
WeaponsCache
Empty Space Interior
InitialDeployment
IRIS DEMO
Iteration #1

Iteration #2
IRIS DEMO

Iteration #3
IRIS DEMO

Iteration #4
IRIS DEMO

Iteration #5
IRIS DEMO

Iteration #6
IRIS DEMO

Iteration #7
IRIS DEMO

Iteration #8
IRIS DEMO

Iteration #9
IRIS DEMO
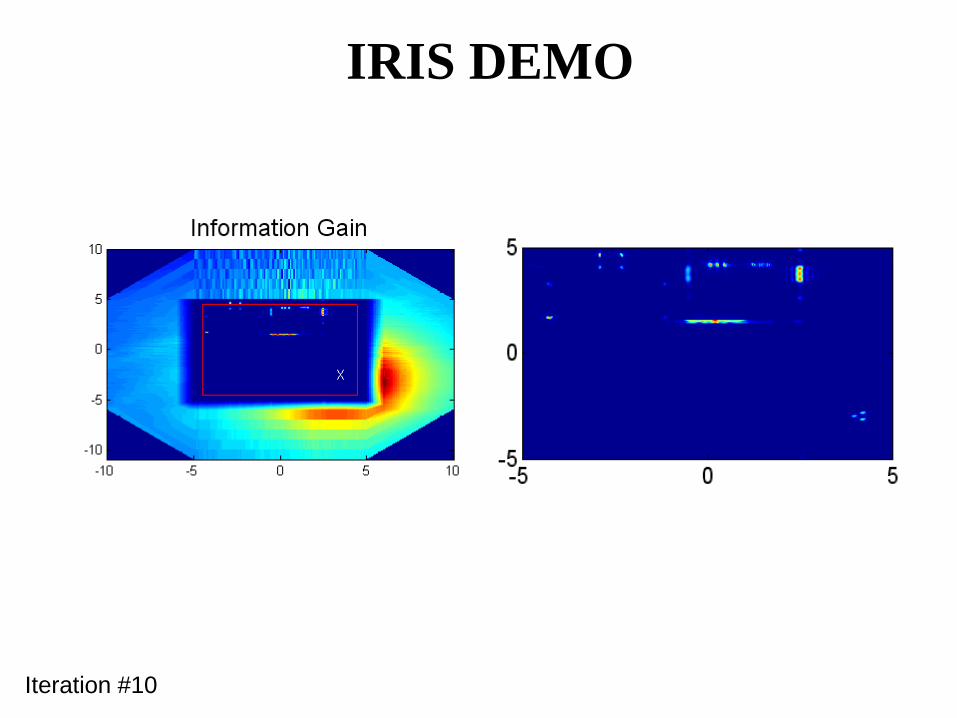
Iteration #10
IRIS DEMO

Iteration #11
IRIS DEMO

Iteration #12
IRIS DEMO

0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1D
etec
tion
Prob
abilit
y
Total Aperture [m]
CONVERGENCE
IRIS DEMO
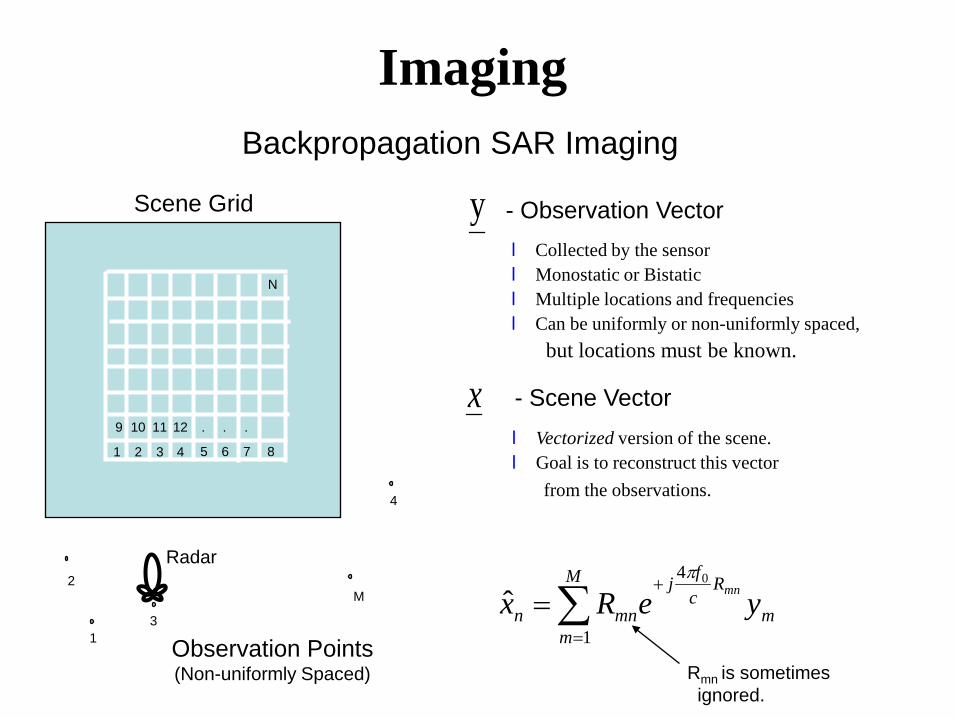
Backpropagation SAR Imaging
Scene Grid
1 2
N
3 4 5 6 7 8
9 10 11 12 . . .
y
x
- Observation Vector
- Scene Vector
l Collected by the sensorl Monostatic or Bistaticl Multiple locations and frequenciesl Can be uniformly or non-uniformly spaced,
but locations must be known.
l Vectorized version of the scene.l Goal is to reconstruct this vector
from the observations.
1
2
3
4
M
Radar
Observation Points(Non-uniformly Spaced)
∑=
+=
M
mm
Rcfj
mnn yeRx mn
1
4 0
ˆπ
Rmn is sometimesignored.
Imaging

l Looping (Desktop PC -2.2GHz, 2.0GBytes, 1-64bit - processor)l MATLAB 11 min 16 secl ANSI C: 1 min 1 sec
l Small Image (100 x 100 pixels) for discussion
l MATLAB (Matrix Multiplication – 1 processor)l Desktop PC (2.2GHz, 2.0GBytes, 1-64bit - processor) : OUT OF MEMORYl Lab PC (3.5GHz, 3.5GBytes, 1 processors): OUT OF MEMORYl Lab PC Linux (3.5GHz, 4GBytes, 1 processor): 1.7 sec l HPC (Linux Networx Evolocity II – 1 node): 2.7 sec
l MATLAB ( Matrix Multiplication Multithreading – 2 processors)l MAC (2GHz, 2GBytes, 2 processors) 1.05 secl Linux (3.5GHz, 4GBytes, 2 processors) 0.95 sec
100 pix
100 pix
l MATLAB ( FFT Acceleration)
l Wavenumber Migration (Multithreading - 2 processors) 0.09 sec
35x
1.8x
10x
Imaging
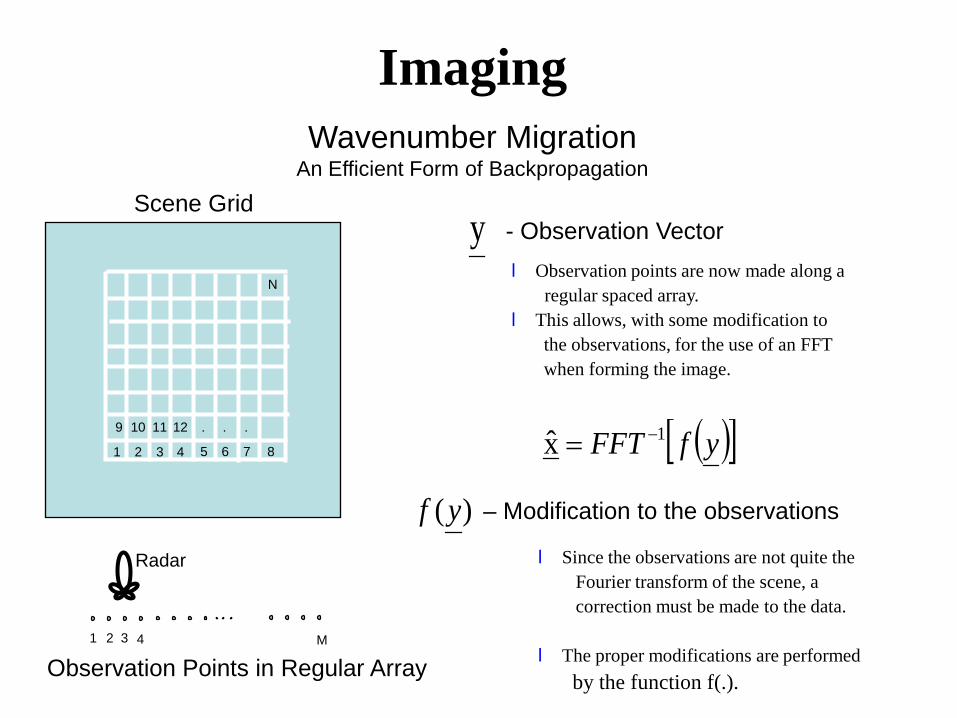
Wavenumber MigrationAn Efficient Form of Backpropagation
Scene Grid
1 2
N
3 4 5 6 7 8
9 10 11 12 . . .
y - Observation Vectorl Observation points are now made along a
regular spaced array.l This allows, with some modification to
the observations, for the use of an FFT when forming the image.
1 2 3 4 M
Radar
Observation Points in Regular Array
– Modification to the observations
l Since the observations are not quite theFourier transform of the scene, a correction must be made to the data.
l The proper modifications are performedby the function f(.).
( )[ ]yfFFT 1x −=
)(yf
Imaging

Azimuth
FFT
After Azimuth FFT
-60 -40 -20 0 20 40 60
30
40
50
60
70
80
After 2D Phase Compensation
-60 -40 -20 0 20 40 60
30
40
50
60
70
80
(Kx,Kz) Domain after Stolt Interpolation
-60 -40 -20 0 20 40 60
20
30
40
50
60
70
80
Focused Image
-1.5 -1 -0.5 0 0.5 1 1.5
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
2D
Phase
Comp
Stolt
Interp
2D
FFT
After Azimuth FFT
-60 -40 -20 0 20 40 60
30
40
50
60
70
80
After 2D Phase Compensation
-60 -40 -20 0 20 40 60
30
40
50
60
70
80
(Kx,Kz) Domain after Stolt Interpolation
-60 -40 -20 0 20 40 60
20
30
40
50
60
70
80
Mechanics ofWavenumber
Migration
Place in Ω-k
Format
2D Phase Comp.
StoltInterp.
2DFFT
PointSpreadFunction
FocusedPoint
R(kx,Ω) D(kx,kz)R(kx,Ω)F(kx,,Ω)
Imaging
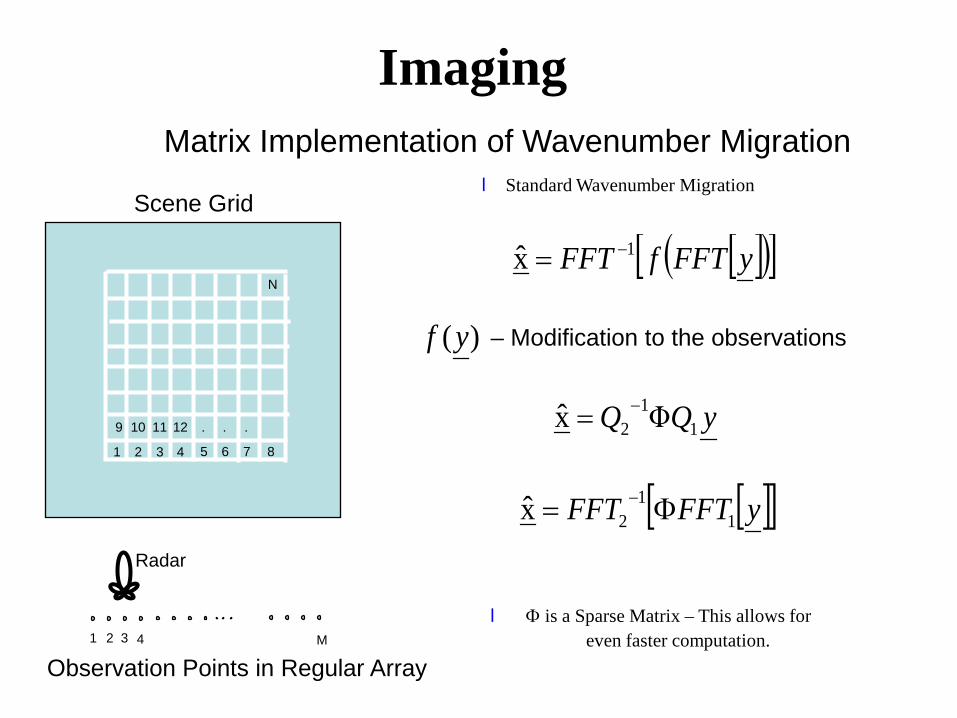
Scene Grid
1 2
N
3 4 5 6 7 8
9 10 11 12 . . .
1 2 3 4 M
Radar
Observation Points in Regular Array
– Modification to the observations
l Φ is a Sparse Matrix – This allows for even faster computation.
[ ]( )[ ]yFFTfFFT 1x −=
)(yf
Matrix Implementation of Wavenumber Migration
Imaging
l Standard Wavenumber Migration
yQQ 11
2 Φx −=
[ ][ ]yFFTFFT 11
2x Φ= −

SparsityModel
• Radar imagery often has a significant number of zero pixels.
• We want to make use of this fact to produce better reconstructions.
• A Sparsity Model for an image is proposed as an exponential distribution of pixel amplitudes combined with a discrete probability of zero.
Sparse Reconstruction
Image Pixel Amplitude
• This sparsity constraint cannot be implemented like the standardLagrange Multipliers.
0aexxfX ωδω +−= )()1()( || xa−
Imaging
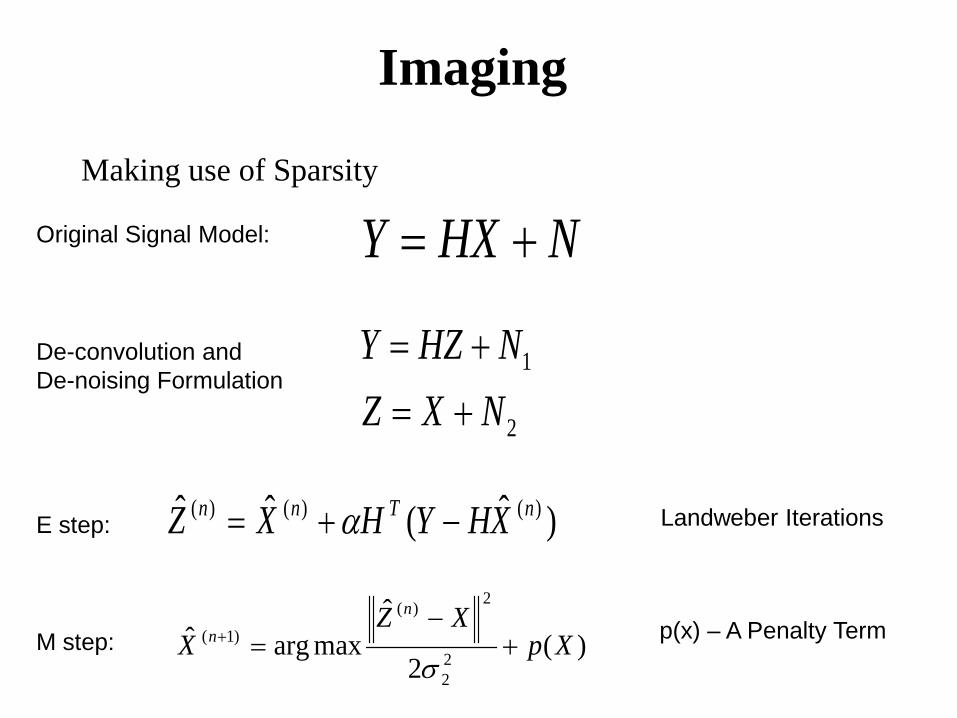
De-convolution andDe-noising Formulation
NHXY +=
2
1
NXZNHZY
+=+=
)ˆ(ˆˆ )()()( nTnn XHYHXZ −+= α
Original Signal Model:
E step: Landweber Iterations
Making use of Sparsity
)(2
ˆmaxargˆ
22
2)(
)1( XpXZ
Xn
n +−
=+
σM step: p(x) – A Penalty Term
Imaging

Pixel-wise Soft Threshold
M Step
)(2
ˆmaxargˆ
22
2)(
)1( XpXZ
Xn
n +−
=+
σM step:
Implementing a Sparsity Constraint
Soft Thresholding Implementation*
*M. Figueiredo and R. Novak, “An EM Algorithm forWavelet-based Image Restoration,” IEEE Trans. ImageProcessing, vol. 12, pp. 906-916, 2003.
)()1( ˆ nn ZX =+ ^
(Applied to Amplitude)
XXp λ=)(l1 penalty function
l0 penalty functionNumber of Non-zeropixels
Sparse Prior InformationAverage Number of Zero PixelsStatistical Distribution of Non-zero Pixels
M step:
Imaging

Forward Wavenumber Migration
Reverse Wavenumber Migration
Azimuth
FFT
2D
Phase
Comp
Stolt
Interp
2D
FFT
Place in Ω-k
Format
Phase Comp.
StoltInterp.
FFT-1
Azimuth
FFT
2D
Phase
Comp
Stolt
Interp
2D
FFTFFT InverseStolt
Phase(un)comp
Place inx-k
Format
ObservationDomain
ObservationDomain
ImageDomain
ImageDomain
)ˆ(ˆˆ )()()( nTnn XHYHXZ −+= α
(Imaging)
Efficient Landweber Iterations
(Un-imaging)
Imaging Un-Imaging
Imaging

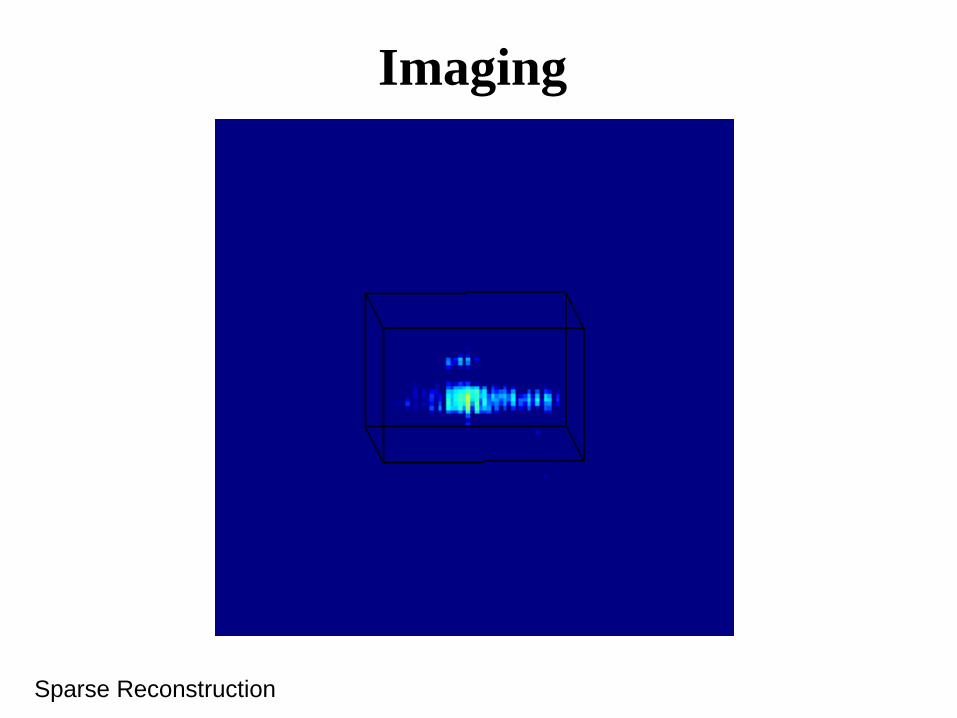
Sparse Reconstruction
-30 -20 -10 0 10 20 30-15
-10
-5
0
5
10
15
Imaging

3D Landmine Imaging
GPR Radar System
Dep
th [m
]
Along Track [m]
Sample Signature
-5 0 5
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Depth: 2”
Dep
th [m
]
Along Track [m]
Sample Signature
-2 -1.5 -1 -0.5 0 0.5 1 1.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Real WorldBounding Box
Want to determine:Object depth and sizeIn Three DimensionsIn Near Real Time
Diameter: 13”Height: 6”
Imaging

Imaging
Raw GPR Data

Imaging
Wavenumber Migration
Imaging
Sparse Reconstruction

ImagingContributions
l Marble,J.A., Hero,A.O., ``Iterative Redeployment of Illuminatiion andSensing (IRIS): Application to STW-SAR Imaging,'' in Proc. of the 25th Army Science Conference, Orlando, FL, Nov. 2006.
l Marble,J.A., Hero,A.O., ``Phase Distortion Correction for See-Through-The-Wall Imaging Radar,'' ICIP: International Conference on Image Processing 2006, Atlanta, GA, Oct. 2006.
l Marble,J., Hero,A, ``See Through The Wall Detection and Classification ofScattering Primitives,'' SPIE: Detection and Remediation Technologies forMines and Minelike Targets XI, March 2006, Orlando, FL.
l Landmine Detection/Classification l SNR enhancement of both GPR and EMI signals.l Sensor Scheduling of Confirmation Sensors
l I.R.I.S. Numerical Simulationl Iterative Redeployment of Imaging and Sensingl Adaptively build a large scene out of small aperture
radar measurements.l Use sensor scheduling to redeploy small aperture radar.
l Fast Imaging of Large Scenesl 2D for STW and 3D for Landminel Matrix Implementation of Wavenumber Migrationl Fast Adjoint Operator based on “Reverse
Wavenumber Migration”
ConclusionsMajor Contributions of this Thesis