บทที่ - spudspace.spu.ac.th/bitstream/123456789/4797/11/51ee108.pdfm 3 บทท 2...
TRANSCRIPT

1
บทท1
บทน ำ
ในปจจบนเทคโนโลยทางดานอตสาหกรรม ไดมการพฒนาล าหนาไปอยางรวดเรวโรงงานอตสาหกรรมสวนใหญ มกมการน ามอเตอรมาใชในการขบเคลอนเครองจกรกล ในรปแบบตางๆและโครงงานนกเปนสวนหนงทไดน ามอเตอรมาประยกตดดแปลงเปนรถจกรยานยนตไฟฟาขนาดเลก ขบเคลอนดวยมอเตอรไฟฟา ซงตนทนในการผลตนนจะถกกวารถจกรยานยนตทมขนาดและความเรวเทาๆกนสามารถชวยลดมลภาวะทางอากาศ และยงชวยใหประหยดเชอเพลงทเปนน ามนทมราคาไมแนนอนในปจจบน
1.1 ควำมส ำคญของปญหำ
1. ลดปญหามลภาวะทางอากาศ 2. ลดปญหามลภาวะทางเสยงจากเครองยนต 3. ลดปญหาการเกดภาวะโลกรอน 4. ลดปญหาการใชน ามนเชอเพลงทมราคาเพมขนในปจจบน 5. เพอเปนทางเลอกใหมแทนการใชน ามนเชอเพลง
1.2 วตถประสงคของโครงงำน
1. เพอศกษาโครงสรางและกลไกการบงคบควบคมรถจกรยานยนตไฟฟาไฟฟา 2. เพอศกษาการท างานของมอเตอรไฟฟากระแสตรง 3. เพอศกษาการท างานของาารดแวรของรถจกรยานยนตไฟฟา 4. เพอออกแบบและสรางวงจรควบคมการท างาน

2
1.3 โครงสรำงของโครงงำน
ภาพท 1.1 โครงสรางของโครงงาน
1.4 ขอบเขตของโครงงำน
1. สรางรถจกรยานยนตไฟฟา ทมขนาดตวถงรถ ยาว 150 ซม. กวาง 60 ซม. สง 94 ซม. 2. สรางวงจรควบคมขบเคลอนดวยลอหลงใชมอเตอรไฟฟากระแสตรง 36 โวลต 750 วตตแบตเตอรขนาด 12 โวลต 20 แอมแปรจ านวน 3 ชด 3. ระบบเบรก ใชเบรกแบบดมทลอหนาและเบรกดวยพลงงานกลบคนทลอหลง 4. สามารถท าความเรวไดไมนอยกวา 40 กโลเมตรตอชวโมง 5. น าหนกของผขบขไดสงสด 70 กโลกรมโดยไมรวมน าหนกของตวรถ
1.5 ประโยชนทไดรบจำกโครงงำน
1. ไดทกษะการออกแบบวงจรควบคมรถจกรยานยนตไฟฟา ทไมกอใหเกดมลภาวะเปนพษ 2. เพอประยกตใหการใชงานมอเตอรไฟฟากระแสตรงกบอปกรณอน 3. เพอเปนแนวทางในการพฒนาการปรบปรงรถจกรยานยนตไฟฟาไฟฟาในเชงพาณชย 4. เพอสงเสรมการลดมลภาวะทางอากาศและประหยดพลงงานเชอเพลง 5. เพอใชในการขบขหรอเปนพาหนะในการเดนทาง
วงจรควบคม วงจรชอปเปอร
แบตเตอร 36โวลต
20 แอมแปร
มอเตอรไฟฟา

3
บทท 2
ทฤษฎทเกยวของ
2.1 คณลกษณะพนฐำนของมอเตอรไฟฟำกระแสตรง
วงจรเทยบเคยงของมอเตอรไฟฟากระแสตรงแบบกระตนแยก มลกษณะดงภาพท 2.1
Va
ia Lm
Rm
Lf
Rf
if
+
-
M
ω
Td
+
-
B
ภาพท 2.1 วงจรเทยบเคยงของมอเตอรไฟฟากระแสตรงแบบกระตนแยก เมอมอเตอรถกกระตนดวยกระแสทฟวส ( i
f) และกระแสทอารเมเจอร ( i
a) ภายใน
วงจรอารเมเจอรขอมอเตอรท าใหเกดแรงดนแรงดนตานกลบ (Back Emf) และแรงบดทโหลด ณ ระดบความเรวคงท i
fของมอเตอรไฟฟากระแสตรงแบบกระตนแยกไมไดขนอยกบ i
aนนคอหมายถงการ
เปลยนแปลงใด ๆของ ia ไมมผลกระทบตอ i
f นอกจากน i
f ยงมคามากกวา i
a น มากๆ
จากภาพท 2.1 เราสามารถหาคากระแสทฟวสชวขณะ

4
ไดสมการ
𝑉𝑓 = 𝑅𝑓𝐼𝑓 + 𝐿𝑓𝑑𝑡
𝑑𝑡 (2.1)
หาคากระแสอารเมเจอรชวขณะไดจากสมการ 𝑉𝑎 = 𝑅𝑎𝐼𝑎 + 𝐿𝑎
𝑑𝑖𝑎
𝑑𝑡+ 𝑒𝑔 (2.2)
แรงดนตานกลบ ( ge ) ของมอเตอรซงรยกวา แรงดนความเรว (Speed Voltage) มคาเปน g v fe K i (2.3) แรงบดทอารเมเจอร (Torque Developed ; Td ) มคาเปน
d t f aK i i (2.4) d มคาเทากบแรงบดทสงไปยงโหลด ดงน
d L
dJ B
dt
(2.5)
เมอ = ความเรวเชงมมหรอความเรวมอเตอร มหนวยเปนเรเดยลตอวนาท (rad/s) หรอ รอบตอนาท (rpm)
B = คาคงทของแรงเสยดทานมหนวยเปน N.m / เรเดยลตอวนาท (rad/s)
vK = คาคงทของแรงดน มหนวยเปนโวลตตอแอมแปร-เรเดยลตอวนาท (V/A-rad/s)
tK = vK = คาคงทของแรงบด
aL = อนดกแตนชของวงจรอารเมเจอร มหนวยเปนเานร (H)
fL = อนดกแตนซของวงจรฟลด มหนวยเปนเานร (H)
aR = ความตานทานของวงจรอารเมเจอร มหนวยเปน (Ω)
fR = ความตานทานของวงจรฟลด มหนวยเปน (Ω) ขณะสภาวะคงท (Steady State) คาอนพนธเวลา (Time Derivatives; dt) จากสมการเหลาน
เปนศนยเปนผลใหปรมาณตาง ๆ ทปรากฏในสมการขางบนนคาเฉลยทสภาวะคงท ดงนคอ
f f fV R I (2.6)
g a fE K I (2.7)
5
a a a gV R I E
a a v gR I K I (2.8)
d t f aK I I
dB (2.9) ก าลงไฟฟาทอารเมเจอร (Developed Power; dP ) มคาเปน
d dP (2.10)
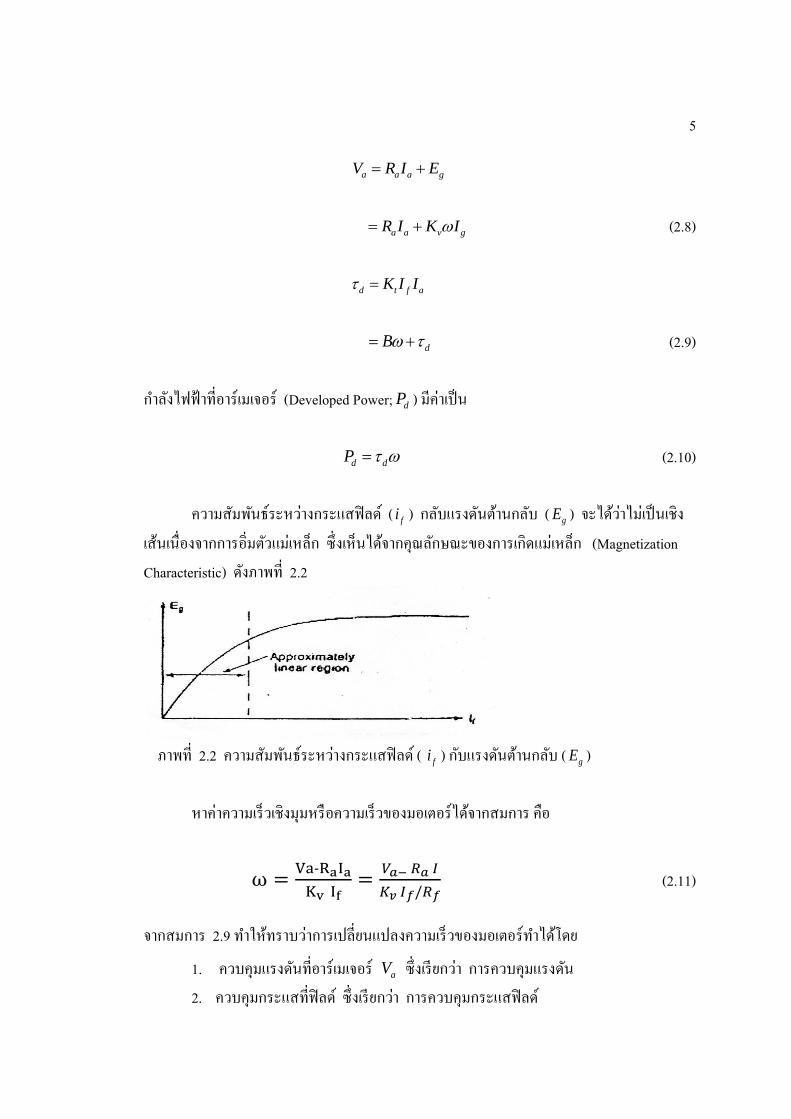
ความสมพนธระหวางกระแสฟลด ( fi ) กลบแรงดนตานกลบ ( gE ) จะไดวาไมเปนเชงเสนเนองจากการอมตวแมเหลก ซงเหนไดจากคณลกษณะของการเกดแมเหลก (Magnetization Characteristic) ดงภาพท 2.2
ภาพท 2.2 ความสมพนธระหวางกระแสฟลด ( fi ) กบแรงดนตานกลบ ( gE )
หาคาความเรวเชงมมหรอความเรวของมอเตอรไดจากสมการ คอ
ω =Va-RaIa
Kv If=
𝑉𝑎− 𝑅𝑎 𝐼
𝐾𝑣 𝐼𝑓/𝑅𝑓 (2.11)
จากสมการ 2.9 ท าใหทราบวาการเปลยนแปลงความเรวของมอเตอรท าไดโดย
1. ควบคมแรงดนทอารเมเจอร aV ซงเรยกวา การควบคมแรงดน 2. ควบคมกระแสทฟลด ซงเรยกวา การควบคมกระแสฟลด

6
3. ควบคมกระแสทอารเมเจอร ( aI ) ขณะ ( fI ) มคาคงท ความเรวซงสอดคลองกบคาพกดของ aV คาพกดของ fI และคาพกดของ aI จะเรยกวา
ความเรวฐาน (Base Speed) หรอความเรวพกด ส าหรบคณลกษณะของมอเตอรไฟฟากระแสตรงแบบกระตนแยกน เมอมการน าสมการ 2.9 มารวม พจารณาท าใหทราบวา : กรณความเรวของมอเตอรต ากวาความเรว หรอฐานเรงความเรวใหถงความเรวฐาน คา aI จะคงท ดงนน เมอความเรวของมอเตอรต ากวาความเรวฐาน จงขนอยกบการปรบคาของแรงดนอารเมเจอร ( aV ) เพอใหไดแรงบดคงท กรณความเรวของมอเตอรสงกวาความเรวฐาน คาแรงดนอารเมเจอร ( aV ) จะคงท ดงนน ความเรวของมอเตอรจงขนอยกบการปรบคาของ fI (เพอใหได dP คงท)
2.2 ทฤษฎพนฐำนของวงจรควบคม
วงจรควบคมนจะเปนวงจรทใชเปลยนแปลงแรงดนกระแสตรงจากแหลงจายไฟฟากระแสตรงทมแรงดนระดบหนงไปเปนอกระดบหนง การน าไปใชงานสวนมากจะเปลยนแรงดนเพอจายใหกบอารเมเจอรของมอเตอรกระแสตรง เพอชวยในการเรมเดนและควบคมความเรวของมอเตอร และยงสามารถใชเปนแหลงจายไฟฟากระแสตรงทเปลยนแปลงแรงดนไดสะดวก หลกการเบองตนของวงจรควบคม สามารถพจารณาจากวงจรพนฐานในวงจรประกอบดวยแหลงจายไฟฟากระแสตรง, สวทซ, โหลดเปนความตานทานของวงจร ทใชงานจรงจะใชเพาเวอรทรานซสเตอร, เอสซอาร มอสเฟส และไอจบท ท าหนาทเปนสวทซ แตในโครงงานนจะใช ไอจบท เปนสวทซซงตอบสนองความถไดสงเมอปดสวทซ แรงดนทโหลดจะเทากบแรงดนทแหลงจาย เมอเปดสวทซ แรงดนทโหลดจะเทากบศนย และแรงดนเฉลยทโหลดจะเปลยนแปลงตามระยะเวลาทปดสวทซและเปดสวทซ จง เรยกวธนวา “ชอปเปอร” หรอ D.C -to- D.C. ถาชวงระยะเวลาทสวทซเปด-ปดเปลยนแปลงแตกตางกน กจะท าใหแรงดนทโหลด ( 0V ) และกระแสทโหลดเปลยนแปลง ซงจะมคาแรงดนเฉลยและจะมความสมพนธกบแรงดนไฟฟาของแหลงจาย ดงน onT = ระยะเวลาทสวทซปด offT = ระยะเวลาทสวทซเปด

7
T = ระยะเวลาในหนงไซเคล = onT + offT
0 0
1 t
saveV V
T (2.12)
0
onTs tV
T
ons
TV
T
0 saveV K V (2.13)
ซงคา on
on off
TK
T T
อตตราสวนระยะเวลาเปดและเวลาปด
= Duty Cycle
2
. .0
1 onT
r m s sV V t dtT
(2.14)
sV k (2.15)
ลกษณะการเปด-ปดสวทซในวงจรควบคม สามารถแบงออกได 3 ลกษณะคอ
1) onT เปลยนแปลง offT และ เปลยนแปลง แต T คงทจะเรยกการท างานลกษณะนวา “วธการเปลยนแปลงความกวางของพลส” (Pulse Modulation) แรงดนทโหลดจะมคาลดลงเมอ onT ลดลง 2) onT คงท และ offT เปลยนแปลง แต T เปลยนแปลงจะ เรยกการท างานลกษณะนวา “วธการเปลยนแปลงความถ” (Frequency Modulation) แรงดนทโหลดจะมคาลดลงเมอ offT มากขน

8
3) ลกษณะการท างานของการเปลยนแปลงความกวางของพลสและเปลยนแปลงความถ ซงแบงได 2 กรณ คอ onT เปลยนแปลง offT และ คงท แต T เปลยนแปลงและ onT เปลยนแปลง offT และ เปลยนแปลง และ T เปลยนแปลง เมอพจารณาจากวงจรแลวนนจะเหนวาจะมแรงดนเอาทพททเปนภาพ Wave Form ทจะเปนแรงดนไฟฟากระแสตรงไดอยางไรวธแกกคอ สวทซทใชจะตองใชกบสญญาณทมความถสงๆจงจะมองไมออกวาเปน Wave Form
2.3 ไอจบท (IGBT) ยอมำจำก Insulate Gate Bipolar Transistor [1]
ภาพท 2.3 สญลกษณของไอจบททง 2 แบบ ไอจบทคอนขางจะเปนอปกรณทใหมอยแตพอจะมใชกนบางในปจจบนและมจ าหนายกนหลากหลายเบอรดวยกนในปจจบนจงมสญลกษณอยหลายรปแบบดวยกนซงขนอยกบผผลตวาจะมการก าหนดสญลกษณ ใดๆเปนสญลกษณประจ าสนคาทผลตขน สวนมากจะมอย 2 แบบดงภาพท2.3 ซงเปนสญลกษณและชอเรยกขาตางๆของ ไอจบทชนดเอนแชนเนลจากภาพท 2.3(ก) จะเหนวามสญลกษณคลายกบมอสเฟสมากๆ เพยงแตสญลกษณจะมลกศรเพมขนมาตรงขาเดรน ลกษณะของลกศรจะชเขาหาตวหรอชเขาหาชนของซลคอนภายในตวไอจบทสวนสญลกษณของภาพท 2.3 (ข) จะเหมอนกบสญลกษณของทรานซสเตอร แตตรงขาเกต (หรอ) ขาเบสของทรานซสเตอร จะเพมขดขนมาอกหนงขด เพอใหเหนวาขดทเพมมานนไมไดตอถงกนโดยตรงกบขาทตอออกมาใชภายนอก

9
ภาพท 2.4 ภาพหนาตดโครงสรางพนฐานของไอจบท
โครงสรางของไอจบทชนดเอนแชนเนลแสดงเปนภาพตดขวางได ดงภาพท 2.4 โครงสรางสวนมากจะมลกษณะเหมอนมอสเฟสจะแตกตางกนตรงทไอจบท จะมชน P+ หรอชนองเจทตง จะตออยระหวางขาเดรนซงในทนมอสเฟสจะไมม และจากการทขาเกทถกกนดวยชนของซลคอนออกไซด (SiO2)เปนผลท าใหความตานทานอนพตทขาเกตมคาสงมากเหมอนกบเพาเวอรมอสเฟส โดยทวไปจะมคาอยชวง10กกะโอหม
ภาพท 2.5 (ก)กราฟแสดงคณสมบตระหวางกระแสและแรงดนของไอจบท (ข)กราฟแสดงลกษณะสมบตการถายโอนของไอจบท จากผลดงกลาวท าใหลกษณะของกราฟแสดงคณสมบตของกระแสและแรงดนของไอจบท มลกษณะคลายกบระหวางขาเกต และ ขาซอรสมากกวา การควบคมกระแสทขานจะเหมอนกบตวทรานซสเตอร ซงกราฟแสดงแสดงคณสมบตของกระแสและแรงดนของไอจบทแสดงดงภาพท 2.5

10
(ก)และภาพท 2.5(ข) เปนกราฟคณสมบตการถายโอนกระแสและแรงดน กราฟของทรานซสเตอร แตการควบคมกระแสเดรนจะอาศยการควบคมแรงดน จากภาพกราฟแสดงใหเหนวาสวนใหญของเสนกราฟกจะมคณลกษณะเปนเสนตรงแตจะเรมโคงกตอเมอกระแสเดรนต าๆ นนกคอจดทแรงดนระหวางขาเกต และ ขาซอรส ต าลงเขาใกลแรงดนจดเรมเปลยนสภาวะการท างานท (จด Threshold Voltage: VGS (th))โดยถาแรงดนระหวางเกตและซอรสนต ากวาแรงดนทจด VGS (th) แลวไอจบท จะอยในสภาวะหยดน ากระแส หรอ คทออฟ ในกรณของไอจบทชนดพแชนเนลนนคณสมบตจะคลายกบเอนแชนเนลแตโครงสรางและสญลกษณมลกษณะตรงกน ขามกบเอนแชนเนล
2.3.1 สภำวะน ำกระแส
ภาพท 2.6 ทศทางการไหลของอเลกตรอนและโาลในขณะน ากระแส ขาเดรนเมอไดรบแรงดนไบอสตรงคอ เปนบวกเมอเทยบกบซอรสและแรงดนระหวางเกต กบซอรสมคาเกนVGS(th) ประจไฟฟาบวกทเกดจากแรงดนทขาเกตจะดงเอาอเลกตรอนคอกระแสอเลกตรอน ทไหลจากขาซอรสผานบรเวณใตเกตมายงบรเวณรอยเลอน n- จะรวมกบโาลจะทเปนพาหนะขางนอยทถกฉดมาจากชนอนเจทตง p+ เพราะทรอยตอ J1 ไดรบแรงดนไบอสตรง ท าใหไอจบท อยในสภาวะน ากระแสเกดการไหลของกระแสไฟฟาจากเดรนไปยงซอรสได การรวมกนของโาลและอเลกตรอนภายในบรเวณ n- เรยกวา การมอดเลตสภาพการน ากระแสผลการมอดเลตนจะท าใหความตานทานของบรเวณ n- มคาต าลงเปนการเพมความสามารถในการขบผานกระแสไดสงขน ซงมลกษณะเหมอนเพาเวอรทรานซสเตอร ผลของความตานทานทลดลงท าใหแรงดนตกครอมทสภาวะน ากระแสลดต าลงดวย การสญเสยก าลงงานขณะน ากระแสจงลดลงดวยทศทางการไหลของอเลกตรอนและโาล

11
2.3.2 สภำวะหยดน ำกระแส
เมอแรงดนระหวางขา เกต และ ซอรสลดลงต ากวาแรงดน VGS(th) จะท าใหมแรงดนทไม
เพยงพอส าหรบการแปรสภาพชนบอด p เปน n ไดท าใหบรเวณ n-ไมตรงกบบรเวณซอรส n+ไอจบ
ท จงจะอยในสภาวะหยดน ากระแส และในสภาวะนรอยตอ J2 ทไดรบแรงดนไบอสกลบจะท าให
เกดกระแสรวไหลเพยงเลกนอยเทานนและ นอกจากนยงท าใหเกดบรเวณปลอดพาหะ ขนทรอยตอ
J2 ดวยบรเวณปลอดพาหะนจะมการขยายบรเวณกวางขนจนเกนเขามายงบรเวณ n- มากกวาทจะ
ขยายไปยงบรเวณชนบอด p เพราะชนบอด p มความหนาแนนของสารทโดปบรเวณรอยเลอย n-
มากเพยงพอกจะท าใหเกดการขยายของบรเวณปลอดพาหะทไมสามารถแตะกบชนอนเจทตง p-ได
ชนบฟเฟอร n+(Buffer Layer) กไมจ าเปนทจะตองท าใหเกดขน หรอไมจ าเปนทจะตองโดปสาเพม
ทงนเพราะการแตะกนของบรเวณทงสองจะท าใหเกดการพงทลายทางดานไบอสตรงส าหรบไอจบ
ททไมการโดปสารในชนบฟเฟอร n+ นจะเรยกวาไอจบท แบบสมมาตรซงจะมอตราการทนแรงดน
ยอนกลบ (VRM หรอ BVSDS) เหมาะส าหรบการน าไปประยกตใชในวงจรไฟฟากระแสสลบ การ
ลดบรเวณความหนาของ n- ลงแตยงคงความสามารถของอตราทนแรงดนไบอสตรงไว สามารถ
ท าไดโดยเพมของชนบฟเฟอร n+ เขาไปเพอปองกนการแตะกนของบรเวณปลอดพาหะกบบรเวณ
อนเจทตง p+ซงจะเรยกไอจบทชนดนวาไอจบทแบบไมสมมาตร และจากการลดความหนาแนนท า
ใหแรงดนตกครอมขณะน ากระแสลดต าลง เปนผลใหการสญเสยก าลงงานลดนอยลงดวยแตขอเสย
ของการเพมของชนบฟเฟอรn+กคอ จะลดความสามารถของอตราทนแรงดนดานยอนกลบใหเหลอ
นอยลงเพยงไมกสบโวลต นนทงนเมอไอจบทไดรบแรงดนไบอสกลบทขาเดรน รอยตอ J1 ซงทง
สองขางมความหนาแนนในการโดปของสารมาก จะไมสามารถทนแรงดนดานยอนกลบไดสง
ดงนนไอจบท ชนดนไมเหมาะสมทจะน ามาใชในวงจรไฟฟากระแสสลบ
2.3.3 กำรแลตชในไอจบท
นอกจากนโาลสวนใหญทรวมกบอเลกตรอนภายใตบรเวณ n- แลวยงมกระแสโาลบางสวนทไหลขามบรเวณ n- เขาสบรเวณชนบอด p โดยตรงผลของกระแสโาลนท าใหเกดแรงดนตกตรอมความตานทานขางเคยง ดงภาพท 2.6 ถาแรงดนนมคามากพอคอประมาณ 0.7 โวลต จะท าใหรอยตอ J3 ไดรบไบอสตรง เปนผลใหอเลกตรอนจากบรเวณซอรสn+ ถกฉดเขามาในชนบอด p ถาดจากภาพท 2.8(ค) จะหมายถงขาเบสและอมตเตอรของทรานซสเตอรเอนพเอนจะไดรบ

12
แรงดนไบอสตรงจะสงผลใหไทรสเตอรซงแฝงอยภายในโครงสรางของไอจบทจะอยในสภาวะแลตช การน ากระแส ท าใหทขาเกตไมสามารถควบคมปรมาณกระแสเดรนไดอกตอไป แตการควบคมของกระแสเดรนนจะขนอยกบตวตานทานทน ามาตอในวงจรภายนอกถาหากมการแลตชเกดขนในวงจรเปนเวลานาน อาจท าใหไอจบทเสยหายไดเพราะมการสญเสยก าลงงานเกนคาพกดกระแสททนได สวนใหญหรอมาตรฐานคมอการผลต มกจะมการบอกคากระแสเดรนสงสดทสามารถไหลผานไอจบท ไดโดยยงไมเกดการแลตชขน (IDM) แตเนองจากกระแสเดรนถกก าหนดหรอควบคม โดยตรงจากแรงดนระหวางขาเกต และ ซอรส บางครงคมอบอกแรงดนทสงสดระหวางขาเกตและซอรสสงสด การแลตชทกลาวถงขางตนเรยกวาการแลตชในหมดสแตตกเพราะเกดขนเมอกระแสทไหลในสภาวะการน ากระแสมคาเกน IDM แตลกษณะการแลตชนกสามารถเกดขนได เรยกวาโหมดไดนามก ซงจะเกดขนเมอมการเปลยนการท างานจากสภาวะน ากระแส ไปเขาสสภาวะหยดน ากระแสไดดวยในบางครงการแลตชนเกดขนไดแมวากระแสเดรนขณะน ากระแสยงมคาต ากวาคา IDM กตามยงสงผลทเกดขนท าใหบรเวณปลอดพาหะทมการขยายบรเวณของชนบอด p โดยเฉพาะจะขยายเขาสบรเวณ n- มากกวา เพราะมความหนาแนนของการโดปสารทต ากวา การขยายบรเวณของปลอดพาหะอยางรวดเรว จะท าใหโาลทคางอยบรเวณ n- ขณะน ากระแสและยงไมไดรวมกบอเลกตรอนหลดรอดจากการขดขวางของบรเวณปลอดพาหะ เขาไปสะสมอยในบรเวณรอยตอ J2 เปนการเพมกระแสทไหลผานตวตานทานขางเคยงใหสงขนท าใหไทรสเตอรภายในไอจบทเกดการแลตชขนได เมอเกดการแลตชขนนนแรงดนตกครอมขาซอรสและเดรนขณะน ากระแสจะมคาต ากวาระดบปกตนอกจากนการแลตชยงสามารถเกดขนไดอก
2.3.4 กำรปองกนกำรแลตช การหลกเลยงการแลตชของไอจบท สามารถท าไดทงผผลตและผใชงานเองโดยจะมอยสองวธดงน วธแรกอาจท าไดโดยลดความกวางของบรเวณซอรส n+ ลงนนคอลดคา Ls ลงนนเอง วธทสองเปนการแบงระดบความหนาแนนในการโดปสารของบรเวณบอด p ดงในภาพท 2.7
ภาพท 2.7 โครงสรางทปรบปรงเพอปองกนการแลตชในไอจบท

13
จะเหนวาบรเวณบอด p ภายใตเกตจะโดปดวยความหนาแนนในระดบปกต 1016 cm3 และมความหนาแนนนอยกวาของบรเวณซอรส n+แตสวนอนทเหลอของบรเวณบอด p จะโดปดวยสวนความหนาแนนทมมากกวาคอ 1019 cm3 รวมถงความหนากจะมมากกวาดวยการท าเชนนจะท าใหเพมความสามารถในการน ากระแสใหสงขน เปนการชวยลดความตานทานขางเคยงใหนอยลงดวย ส าหรบผใชงานกสามารถปองกนการแลตชในโหมดสแตตกได โดยออกแบบไมใหกระแสทไหลในโหลดไหลเกนคากระแส IDM และปองกนการแลตชในโหมดไดนามกได โดยหนวงเวลาขณะหยดน ากระแสใหยาวขน เพอใหโาลทยงคางอยในบรเวณ n- มเวลาพอทจะรวมกบอเลกตรอน เปนการลดกระแสทไหลผาน คาความตานทานขางเคยงใหนอยลงเผอใหไดการหนวงเวลาขณะหยดน ากระแสใหยาวนานขน ท าไดโดยการเพมความตานทานภายนอกอนกรมเขากบขาเกตของไอจบท
2.3.5 วงจรสมมลของไอจบท
ภาพท 2.8 (ก)แสดงโครงสรางทมทรานซสเตอรและมอสเฟสฝงอยภายใน (ข)วงจรสมมลส าหรบการท างานสภาพปกตของไอจบท (ค)วงจรสมมลทแสดงสวนของไทรสเตอรทแฝงอยในไอจบท
วงจรสมมลของไอจบทแสดงไวในภาพท 2.8 โดยในภาพ(ก)นนจะเหนวาในบรเวณบอด p ชนบรเวณ n- และชน องเจกตง p+ จะคลายกบทรานซสเตอรชนดเอนพเอน โดยแทนไดดวยขาคอลเลกเตอร เบส และอมตเตอร ตามล าดบและบรเวณภายใตเกตกจะแทนไดดวยมอสเฟสซงจะม

14
ความตานทานบรเวณ n- เชอมขาเบสของทรานซสเตอรพเอนพเขากบขาเดรนของมอสเฟส ซงเมอเขยนวงจรสมมลออกมาจะไดวงจรดงภาพท 2.8(ข) จากภาพท 2.8(ข)จะเหนวาเปนวงจรดารลงตนโดยมมอสเฟสเปนตวขบทรานซสเตอรพเอนพ แตมจดพเศษทแตกตางจากวงจรทวไป คอกระแสเดรนสวนใหญจะไหลจากอมตเตอรมายงเบส ผานความตานทานบรเวณรอยเลอน และผานขาเดรนของมอสเฟสมาจบลงทขาซอรส จะมกระแสสวนนอยเทานนทไหลจากอมตเตอรมายงคอลเลกเตอรและขาซอรส ส าหรบวงจรในภาพท 2.8(ค) จะแสดงใหเหนวาภายในไอจบท จะมไทรสเตอรแฝงอยดวยโดยดไดจากทรานซสเตอรชนดเอนพเอนและพเอนพตอเขาดวยกนในลกษณะทมการปอนกลบ จะเหนไดชดเจนถงเหตทท าใหเกดการแลตชของไอจบทถากระแสสวนนอยทไหลผานจากอมตเตอรมายงคอลเลกเตอรของทรานซสเตอรพเอนพแลวผานความตานทานขางเคยงของรอยตอแลวนนกจะท าใหเกดแรงดนตกครอมความตาน ทานสงกวา 0.7 โวลต ทรานซสเตอรเอนพเอนจะน ากระแส สงผลใหเกดการแลตชขนใน ไอจบท ส าหรบแรงดนตกครอมขาเดรนและ ซอรสของ ไอจบท ขณะน ากระแส 𝑉𝑑𝑠(𝑜𝑛) สามารถเขยนสมการ ไดดงน 𝑉𝑑𝑠(𝑜𝑛) = 𝑉𝑗1 + 𝑉𝑑𝑟𝑖𝑓𝑡 + IDRchannel (2.1) เมอ Vj1 เปนแรงดนไบอสตรงทตกครอมรอยตอพเอน จงมคาคอนขางจะคงทและ จะมการเปลยนแปลงบางกเลกนอย เพราะมความสมพนธโดยตรงในลกษณะเอกซโปเนนเซยลกบกระแส ท าใหมคาอยระหวาง 0.7-1 โวลต Vdrift เปนแรงดนทตกครอมความตานทานบรเวณรอยเลอนซงความตานทานนมคาคอนขางคงท เมอเปรยบเทยบกบคาแรงดนในมอสเฟสแลวจะมคานอยกวาเพราะผลของการมอดเลตสภาพน าทเกดขนในไอจบท Rchannel เปนคาความตานทานในยาน 1- 1,000 โอหม มคาคอนขางคงท IDRchannel เปนแรงดนตกครอมมอสเฟส ดงนนจงสรปไดวา 𝑉𝑑𝑠(𝑜𝑛)จะมคาสงมากขนตามคากระแสเดรนทสงขนโดยทวไป ไอจบท จะสามารถท างานไดในอณหภมรอยตอสงสดถง 150 องศาเซลเซยล และผลของการเปลยนแปลงอณหภมจากคาอณหภมหองไปถงคาสงสดน กจะสงผลใหเกดการเปลยนแปลงของคา 𝑉𝑑𝑠(𝑜𝑛) เพยงเลกนอยเทานน เพราะไอจบท มคา 𝑉𝑑𝑠(𝑜𝑛) เปนผลรวมระหวางแรงดนตกครอมมอสเฟสทมสมประสทธทางอณหภมเปนบวก(อณหภมสงขนแรงดนตกครอมความตานทานบรเวณลอยเลอนจะสงขนตาม) กบแรงดนตกครอมความตานทานบรเวณรอยเลอนทมสมประสทธของอณหภม

15
2.3.6 ลกษณะกำรสวตช ลกษณะของสญญาณกระแสและแรงดนในชวงเวลาทเกดการน ากระแสและหยดน ากระแส แสดงไวในภาพท 2.9
ภาพท 2.9 (ก)ลกษณะของกระแสและแรงดนขณะน ากระแส (ข)ลกษณะของกระแสและแรงดนขณะหยดน ากระแส
โดยชวงเวลาในการน ากระแสของไอจบทจะแสดงไวในภาพท 2.9(ก) ซงะมลกษณะของการน ากระแสจะคลายกบการน ากระแสของมอสเฟส คอจะมเวลากอนการน ากระแส (td(on)) จะนบตงแตเวลาทแรงดนระหวางเกตกบซอรสอยในชวง VGG-จนถง VGS(th)ความจรงแลวการปอนแรงดนนจะมลกษณะการเปลยนแปลงทนททนใดจากคา VGG- เปน VGG+ แตมลกษณะเปนเอกซ
16
โปเนนเซยล เหตทเปนเชนนนคอเนองมาจากผลการชารจประจของตวเกบประจระหวางขาเกตและขาซอรส และ เกทกบเดรนภายในไอจบท แรงดนทขาเดรนจะยงคงทในชวงเวลาขาขน (tri) หรอในชวงเวลาทกระแสเดรนยงไมถงคากระแสท างานน (Io) หลงจากกระแสเดรนกจะคงทแตแรงดนจะจะตกลงสคา VSD(on) โดยจะแบงชวงเวลาลงเปนสองชวง คอชวง tfv1 เปนชวงทท างานอยในยานความตานทานสงๆ สวน tfv2 ชวงทท างานอยในชวงความตานทานต า ในภาพท 2.9(ข) จะเปนภาพแสดงลกษณะกระแสและแรงดนในชวงเวลาทไอจบทหยดน ากระแส จะเหนไดวากระแสเดรนยงคงทอยตลอดชวงเวลาทแรงดนทขาเดรนเพมขนและมชวงเวลาลงของกระแสทขาเดรนทแตกตางชดเจนสองชวงโดยชวงแรก tfi1 จะเปนชวงหยดน ากระแสของมอสเฟสภายในไอจบท แตและชวง tfi2 จะเปนชวงหยดน ากระแสของทรานซสเตอรพเอนพ ซงจะชากวามอสเฟส ท าใหชวงเวลานนานกวาชวงแรกและมการสญเสยก าลงงานมากในชวงน
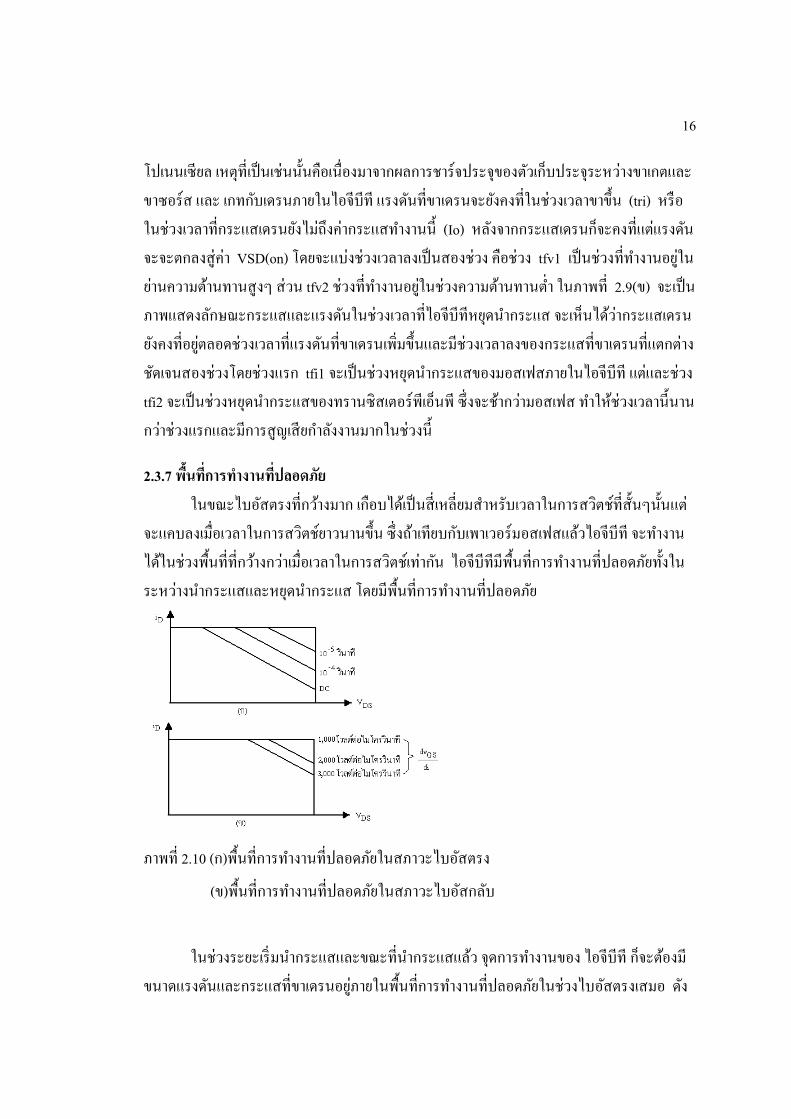
2.3.7 พนทกำรท ำงำนทปลอดภย ในขณะไบอสตรงทกวางมาก เกอบไดเปนสเหลยมส าหรบเวลาในการสวตชทสนๆนนแตจะแคบลงเมอเวลาในการสวตชยาวนานขน ซงถาเทยบกบเพาเวอรมอสเฟสแลวไอจบท จะท างานไดในชวงพนททกวางกวาเมอเวลาในการสวตชเทากน ไอจบทมพนทการท างานทปลอดภยทงในระหวางน ากระแสและหยดน ากระแส โดยมพนทการท างานทปลอดภย
ภาพท 2.10 (ก)พนทการท างานทปลอดภยในสภาวะไบอสตรง
(ข)พนทการท างานทปลอดภยในสภาวะไบอสกลบ
ในชวงระยะเรมน ากระแสและขณะทน ากระแสแลว จดการท างานของ ไอจบท กจะตองมขนาดแรงดนและกระแสทขาเดรนอยภายในพนทการท างานทปลอดภยในชวงไบอสตรงเสมอ ดง

17
ภาพท 2.10(ก)หากไมเชนนนแลวจะท าใหเกดการเสยหายเกดขนกบไอจบทจากรปพนทการท างานทปลอดภยของไอจบทนแสดงถงขดจ ากดของกระแสเดรน , อตราทนแรงดนไหลตรงและอณหภมรอยตอของ ไอจบท ตามล าดบส าหรบการท างานทปลอดภยในชวงของการไบอสกลบ จะแตกตางจากในชวงไบอสตรงโดยในรปนจะแสดงคาจ ากดของคาอตราการเปลยนแปลงแรงดนทขาเดรนตอเวลา (dvDS/dt) ซงจะเกดขนในชวงระหวางหยดน ากระแสแทนขดจ ากดทางดานอณหภมทรอยตอ และ จะมพนทแคบลงถา ( dvDS/dt) มคาสงมากขนสวนเหตผลทถกจ ากดโดยคานเพราะไมตองการใหเกดการแลตชขนท ไอจบทคา (dvDS/dt) นจะมผลโดยตรงกบชวงเวลาหยดน ากระแสของไอจบทหมายความวาถามอตราการเปลยนแปลงเรวจะท าใหชวงเวลาหยดน ากระแสนอยแตกยงถอวาโชคดทขดจ ากด dvDS/dt ของ ไอจบท มคาสงมาก เมอเทยบกบอปกรณไทรสเตอรตวอนๆดงนนความจ าเปนในการใชวงจรสนบเบอรเพอปองกนการแลตชกไมมความจ าเปนตองใช และการควบคมคา dvDS/dt ทเกดขนยงท าไดงายขนดวยการออกแบบวงจรขบเกตทมคาความตานทานทตอกบขาเกตและคา VGG-ทเหมาะสม
2.3.8 DC-DC CONVERTER
Io
load VoVin
s
Vo
Vin
0 on t
ภาพท 2.11 หลกการของ DC-DC Chopper
ดซ ชอปเปอรเปนวงจรทท าหนาทเปลยนแปลงแรงดนไฟฟาดซ จากแหลงจายไฟฟาทมคาคงทใหไดแรดนเอาทพทดซทสามารถปรบคาไดตามตองการ โดยใชหลกการ ON และ OFF อเลกทรอนกสสวตซ หรอ ดซชอปเปอรโดยทวไปจะน าไปใชในงานตอไปนรถยนตทขบเคลอนดวยพลงงานไฟฟาจากแบตเตอรกระแสตรงและภายในโครงงานนไดน ามาใชในการขบเครองรถจกรยานยนตไฟฟาดวยพลงงานไฟฟาจากแบตเตอรกระแสตรงเชนเดยวกน

18
Regulator ประสทธภาพสง เปนตน การ ON และ OFF อเลกทรอนกส สวตซมวธการ 2 แบบคอ การ ON และ OFF อเลกทรอนกสมวธการ 2 แบบคอ 1. แบบ Constant –Freqency เปนวงจรชอปเปอรทควบคมให Time Period (T) คงท แลวปรบเวลา ON time (Ton) การควบคมในลกษณะนเรยกวา Pulse - Width – Modulation (PWM) 2. แบบ Variable – Frequency เปนวงจร ชอปเปอรทปรบ Time Period โดยการปรบ ON Time หรอ OFF Time (T –T on) การควบคมแบบนเรยกวา Frequency – Modulation แตเนองจากการควบคมในลกษณะนความถมการเปลยนแปลงในยานกวางท าใหยากในการ Filter
2.3.9 อเลกทรอนกสสวตซทใชในวงจรมอย 2 แบบคอ
1. แบบทท าใหกระแสหยดไหลดวยการบบบงคบ(Forced Commutation) คอ เอสซอาร จะน ามาใชงานในความถต า
2 . แบบทท าใหกระแสไหลใดดวยตวเอง (Self Commutation) คอ เพาเวอร
ทรานซสเตอร มอสเฟส จทโอ และ ไอจบท จะน ามาใชในงานความถสง
2.4 กำรขบเคลอนมอเตอรไฟฟำกระแสตรงดวยชอปเปอรในสองควอตแดนซ [2]
มอเตอรแบบ Regenerative ทศทางของแรงดนเปนบวก แตทศทางของกระแสจะกลบเปนทศทางจากเดมทศทางกระแสเปนลบ ในสภาวะน มอเตอรจะเปลยนสภาวะเปนเครองก าเนดไฟฟา ก าลงงานของมอเตอรจะไหลยอนกลบไปทแหลงจายไฟฟาและถกลดวงจรกระแสตรงโดยใชไอจบทแรงบดมทศทางสวนทางกลบทางเดมท าใหความเรวรอบของมอเตอรจะลดลงอยารวดเรว
2.4.1 วงจรชอปเปอรแบบ 2 ควอตแดนซ การควบคมวงจรชอปเปอรจะท างานในควอตแดนซท 1 เมอแรงดนอารเมเจอรและกระแส
อารเมเจอรเปนบวก ในการเบรกนนวงจรชอปเปอรจะท างานในควอตแดนซท 2 แสดงในภาพท 2.12(ก) ก าลงเปนทนยมใชกนมากในการเบรกมอเตอร วงจรไอจบท แบบ 2 ควอตแดนซจะแสดงในภาพท 2.12(ข)
การควบคมก าลง ทรานซสเตอร 1Q และ ไดโอด 2D จะท างานเมอ 1Q ท างาน แรงดน
แหลงจาย sV จะไหลไปทมอเตอร เมอ 1Q ไมท างานกระแสในอารเมเจอรจะไหลวนเวยนผาน
ไดโอด 2D

19
V
I
M
Q1D1
Q2
D2
+
-
VS
ภาพท 2.12 วงจรขบเคลอนมอเตอรแบบสองควอตแดนซ
ภาพแสดงวงจรการขบเคลอนมอเตอรแบบสองควอตแดนซ และการควบคมก าลง ทรานซสเตอร 1Q และ ไดโอด 2D จะท างานเมอ 1Q ท างาน แรงดนแหลงจาย sV จะไหลไปทมอเตอร เมอ 1Q ไมท างานกระแสในอารเมเจอรจะไหลวนเวยนผานไดโอด 2D
2.4.2 กำรควบคมกำรเดนหนำของมอเตอร
M
Q1
D1
Q2 D2
+
-
VS
I
ภาพท 2.12(ก) ภาพแสดงการเดนหนาของมอเตอร
การควบคมการเดนหนา ไอจบท 1Q จะท างาน 2Q จะหยด างาน เมอ 1Q ท างานแรงดนจาก
แหลงจายจะปรากฏทจดตอของมอเตอรและกระแสอารเมเจอรจะเพมขนเมอ 1Q หยดท างาน 2Q
จะท างาน คอการท างานในควอตแดนซท 2 คอการเบรก

20
สมการแรงเคลอนไฟฟาเฉลยของการเดนหนา
a sV kV (2.16) โดยท k = Duty Cycle
sV = แรงดนทแหลงจาย
V
IM
Q1D1
Q2D2
+
-
VSI
ภาพท 2.12(ข) ภาพแสดงการเบรกของมอเตอร
การเบรคแบบ Regenerative ทรานซสเตอร 2Q และไดโอ 1D จะท างานเมอ 2Q ท างานมอเตอรจะเปรยบเสมอเครองก าเนด และกระแสอารเมเจอรจะเพมขน คนพลงงานใหกบแหลงจายโดยกระแสจะไหลผานไดโอด 1D ในอตสาหกรรมทวไปจะนยมใช4 ควอตแดนซ ดงแสดงในภาพท 2.12 (ข) สมการแรงเคลอนไฟฟาเฉลยของการเบรกมอเตอร
1CH sV k V (2.17)
1a CH a CHP I V I V k (2.18)
g v aE K I (2.19)
1CH a a s a aV R I k V R I (2.20)

21
2.5 ฟงกชนกำรถำยโอนแบบลปเปดของมอเตอรไฟฟำกระแสตรงแบบกระตนแยก [3]
ความเรวของมอเตอรไฟฟากระแสตรง จะเปลยนแปลงไดนนตองขนอยกบชนดของโหลด การรกษาความเรวคงทของมอเตอร แรงดนอารเมเจอรจะตอเนองโดยปรบคา Duty Cycle ของ Dc Chopper ในทางปฏบตการควบคมจะนยมใชกนมากในการขบเคลอนมอเตอร ในงานอตสาหกรรมจะใชการควบคมแบบปดวงจรระบบควบคมการปดวงจรจะมผลท าใหในการปรบความแมนย าใหมการตอบสนองอยางรวดเรวและลดการรบกวนของสญญาณและระบบนจะเสถยร สภาวะคงตวของขบเคลอนกระแสตรงซงไดกลาวมาแลวขางตน ความส าคญในการเลอกชนดของการขบเคลอนนนอาจไมเพยงพอเมอเทยบกบวธการแบบปดวงจรความเขาใจเกยวกบพฤตกรรมการเคลอนท โดยปกตแลวจะแสดงไดจากทรานเฟอรฟงกชนซงส าคญมาก
ในวงจรคอนเวอรเตอรแบบแยกการขบมอเตอรไฟฟากระแสตรง แบบวงจรเปด ความเรวมอเตอรสามารถปรบไดโดยใชแรงดนอางอง rV สมมตใหก าลงไฟฟาเปน 2K แรงดนของมอเตอรจะเปนไปตามสมการ ra vKV 2 (2.21) โดยท aV แรงดนทขวอารเมเจอร
2K ก าลงไฟฟา
rv แรงดนอางอง
สมมตมอเตอรมกระแสฟลด fI กระแสไหลกลบคงท vK จะเปนไปตามสมการ
fvg IKe (2.22)
fv
amamg
amama IK
dt
diLiRe
dt
diLiRv (2.23)
aftd iIKT (2.24)
Laftd TB
dt
dJiIKT
(2.25)
ชวงเวลาคงตวสามารถวเคราะหวงจรไดโดยใชสมการ Laplace’s Transforms สมการ (2.17), (2.27),และ(2.29) sVKsV ra 2 (2.26)
fvamama IKsIsLsIRsV (2.27)

22
sTsBssJsIIKsT Laftd (2.28) จากสมการ(2.28)
mm
fva
aRsL
sIKsVsI
(2.29)
1
am
fva
sR
sIKsV
(2.30)
เมอ mmm RL เปนคาเวลาคงตวของกระแสอารเมเจอรมอเตอร สมการ(2.32) ความเรวของมอเตอรจะมผลตอคาน
BsJ
sTsTs Ld
(2.31)
1
m
Ld
sB
sTsT
(2.32)
เมอ BJ
m เปนคาเวลาคงตวทางกลของมอเตอร สมการ(2.30), (2.34)และ(2.36)สมการใชเขยน
วงจร Open-Loop บลอกไดอะแกรม เราจะพบปญหาอย 2 ขอ ในการควบคมแรงดน rV และโหลดทอรค LT ในการตอบสนองของสภาวะคงตวนนตองไดรบการตอบสนองจาก rV และ LT ดวย การตอบสนองตองท าเปนล าดบขนโดยใชแรงดนอางองโดยไดรบจาก 2T ถง 0 จากภาพท (2-9) เราสามารถรบการตอบสนองความเรวไดจากแรงดนอางอง
BRIKss
BRIKK
sV
s
mfvmama
mfv
r
22
2
1
(2.33)
การตอบสนองการเปลยนแปลงของโหลด LT สามารถรบคาไดจาก rV ถง 0
BRIKss
sB
sT
s
mfvmama
a
L
22 1
11
(2.34)

23
เทอมสดทายของสมการความสมพนธของการเปลยนแปลงความเรว จะควบคมท
แรงดน rV และการเปลยนแปลงของโหลด LT สามารถใชสมการท (2.37) และ (2.38) ตามล าดบ แลวแทน 0S
r
fvm
fvV
IKBR
IKK
2
2 (2.35)
L
fvm
fvT
IKBR
IKK
2
2 (2.36)
มอเตอรไฟฟากระแสตรง จะใชกนอยางกวางขวางโดยการเปลยนคาความเรวคงทของมอเตอรโดยใชการปรบคาตางๆตามทไดกลาวมา
Va(s)
TL(s)
Td(s)
Eg(s)
Ia(s)Vr(s)K2
-
-
KvIf( )s
1
( 1)m aR s
1
( 1)mB s
KvIf
ภาพท 2.13 บลอกไดอะแกรมฟงกชนการถายโอนของมอเตอรไฟฟากระแสตรงแบบเปดวงจร

24
บทท 3
กำรออกแบบวงจรกำรขบเคลอนมอเตอรไฟฟำกระแสตรงแบบ2 ควอตแดนซ
3.1 กำรออกแบบโครงงำน
การออกแบบโครงงานการขบเคลอนมอเตอรไฟฟากระแสตรงแบบ 2 ควอตแดนซแบงออกเปน 3 สวนดงน
- วงจรก าเนดสญญาณพ.ดบเบลย.เอม. (P.W.M.) - วงจรการเลอนเฟส (Phase shift) - วงจรขบเกท ไอจบท (Gate driver circuit)
3.2 วงจรขบเคลอนมอเตอรไฟฟำกระแสตรงแบบ 2 ควอตแดนซ
4 Dead-Time3 Feedback6 RT5 CT14 (+)13 (-)1 (+)2 (-)
(C) 9
(E) 8(Ref Out) 127
Gnd
12V
VR 10 k
15 K
50k
VCC 12V
1 K ¼ W
120
0.01 F
MC3
4060
A
3
3
Gate DriveShift PhasePWM
MC14049UB
HEF4801B
VR 10kΩ
VR 10kΩ
0.01µF
0.01µF
CD4050BE
HEF4801B
M
VCC 12 V
100
100 k
87
5
+
TLP250
VCC 36 V
VCC 12 V
100
100 k
87
5
TLP2502
22W
2W
2W
2W
ภาพท 3.1 แสดงวงจรการขบเคลอนของมอเตอรไฟฟากระแสตรงแบบ 2 ควอตแดนซ
หลกการท างานของวงจรขบเคลอนมอเตอรแบบสองควอตแดนซจะประกอบไปดวยวงจรหลกๆสามวงจรคอ วงจรก าเนดสญญาณ พ.ดบเบลย.เอม.คอ สญญาณสเหลยมทสามารถปรบความกวางของสญญาณเพอใชในการควบคมความเรวของมอเตอร วงจรเลอนเฟสมหนาทในการปรบขอบขาขนของสญญาณพลสใหมการหนวงเวลาในการเกดของแตละควอตแดนซเพอปองกนการชนกนของสญญาณพลสในแตละควอตแดนซ อาจท าใหเกดความเสยหายกบไอจบท วงจรไดร

25
มอเตอรจะประกอบดวยอปกรณส าคญคอ ทแอลพ 250 ท าหนาทในการทรคขาเกทของไอจบทใหเรมน ากระแสผานจากขาเดรนไปซอรสดงนนจงมกระแสไหลผานไปยงมอเตอร
3.3 กำรออกแบบวงจรกำรขบเคลอนมอเตอรไฟฟำกระแสตรง
จากหลกการพนฐานของวงจร ชอปเปอรดงทกลาวมาแลวนน จะน ามาสรางชดขบเคลอนมอเตอรโดยในทนเราจะเลอกการขบเคลอนแบบ 2 ควอตแดนช ทแสดงในหวขอทผานมา โดยม
จดประสงคใหมอเตอรเคลอนทในทศทางเดยวการควบคมแรงดนเฉลยในวงจรอารเมเจอรจะใชวธ
พ.ดบเบลย.เอม. (P.W.M.) พกดของขนาดมอเตอรทตองการขบเคลอนทม ขนาดไมเกน 750 วตต
แรงดน 36 โวลต โดยโครงสรางชดขบเคลอนมอเตอรแบบ 2 ควอดแดนช จะมรายละเอยดดงน
3.4 กำรสรำงวงจรก ำเนดสญญำณพ.ดบเบลย.เอม. (P.W.M.)
วงจรก าเนดสญญาณ พ.ดบเบลย.เอม. (P.W.M.) นจะเลอกใชไอซเบอร MC34060 AD น ซงมวงจรก าเนดสญญาณฟนเลอยและวงจรเปรยบเทยบอยภายใน การก าหนดคาพารามเตอรในการก าเนดความถก าหนดไดดงน ocsf เทากบ ความถของสญญาณพลล ,T TR C เทากบ คาพารามเตอรของวงจรก าเนดสญญาณพลล
1.1T
ocs T
Rf C
(3.1)
3.4.1 กำรค ำนวณหำคำ TC และ TR
วงจรก าเนดสญญาณสญญาณ พ.ดบเบลย.เอม. (P.W.M.) น ไดเลอกใชความถท 10 กโลเารท เหตผลในการเลอกความถในยานน เพอตองการใหกระแสของมอเตอรมรปเปลนอยลง เราจงสามารถเลอกยานความถใหมคามากกวาน แตผลตามมาจะมสญญาณรบกวนมาก จากคมอของ MC 34060A จะหาคาของ TC และ ความตานทาน TR

26
ค านวณหาคา R จากสตร
1.1T
ocs T
Rf C
(3.2)
พจารณา = 0.01 ไมโครฟารด
3 6
1.111
10 10 0.01 10TR
กโลโอหม
4 Dead-Time3 Feedback6 RT5 CT14 (+)13 (-)1 (+)2 (-)
(C) 9
(E) 8(Ref Out) 127
Gnd
VR 10 k
15 K
50k
VCC 12V
1 K ¼ W
0.01 F
MC3
4060
A
Vcc 12 V
Output(P.W.M)
ภาพท 3.2 แสดงวงจรการสรางสญญาณ พ.ดบเบลย.เอม. (P.W.M.) โดยใช IC MC34060AD แสดงภาพวงจรการสรางสญญาณ พ.ดบเบลย.เอม. (P.W.M.) โดยใช ไอซเบอรจากMC34060AD คาความกวางของสญญาณเอาทพท จะถกควบคมจากระดบแรงดนไฟฟากระแสตรง ทปอนเขาทางอนพท ทขา 4 ในชวงระดบแรงดน 0-15 โวลต คาความถของสญญาณเอาทพทจะถกก าหนดทคา TC และ TR ตามภาพท 3.2

27
3.4.2 สญญำณ Pulse Width Modulation (P.W.M)
ภาพท 3.3 แสดงรปคลนสญญาณ อาทพทของ Pulse Width Modulation (P.W.M.)
เปนตวก าเนดสญญาณความถและควบคมความกวางของสญญาณ ตามคาค าสงทผานใหวงจร ก าหนดใหค าสงเทากบคา sV ซงเปนระดบแรงดนไฟฟากระแสตรงนน เมอเปรยบเทยบกบสญญาณรปฟนเลอยททถกสรางขนภายในวงจร พ.ดบเบลย.เอม. หนาทส าคญของวงจรพ.ดบเบลย.เอม.คอสรางสญญาณรปฟนเลอยและ เปรยบเทยบสญญาณฟนเลอยกบระดบแรงดน sV จากภาพท 3.3 นแสดงใหเหนถงการเปรยบเทยบสญญาณทงสอง ไดสญญาณเอาทพทเปนภาพพลส ทสามารถเปลยนแปลงคา ดวตไซเคลตามผลการเปรยบเทยบสญญาณเอาทพทน จะน าไปผานวงจรขบเกทของไอจบท เพอควบคมการเปด-ปดตอไป สวนสญญาณ Dead Time Control ทเหนในรปเปนสญญาณอนพทอกขาหนง MC34060AD มไวใชในกรณทตองการควบคม Dead Time โดยคณสมบตเดยวกบขา sV
3.4.3 กำรก ำหนดยำนควำมถของวงจร พ.ดบเบลย.เอม. (P.W.M.)
หลกเกณฑในการก าหนดขนาดความถใหวงจร ชอปเปอร มดงน - คณสมบตของไอจบททน ามาใชในการเปด - ปดวงจรในทนเลอกใช ไอจบท ของบรษท International Rectifier (IR) เบอร IRGPH40U อตราทนแรงดนสงสดจะเทากบ 600 โวลต การตอบสนองความถ 1-10 กโลเารท อตราทนกระแสตอเนองท คอลเลคเตอร40 แอมแปรทอณหภม 25 องศาเซลเซยส - ความตอเนองของกระแสอารเมเจอร ในขณะทมการเปด-ปด ถาความถของการเปด-ปด
นอยเกนไป จะเกดความไมตอเนองของกระแส ท าใหมผลกบคาแรงบดทมอเตอรสรางขน
28
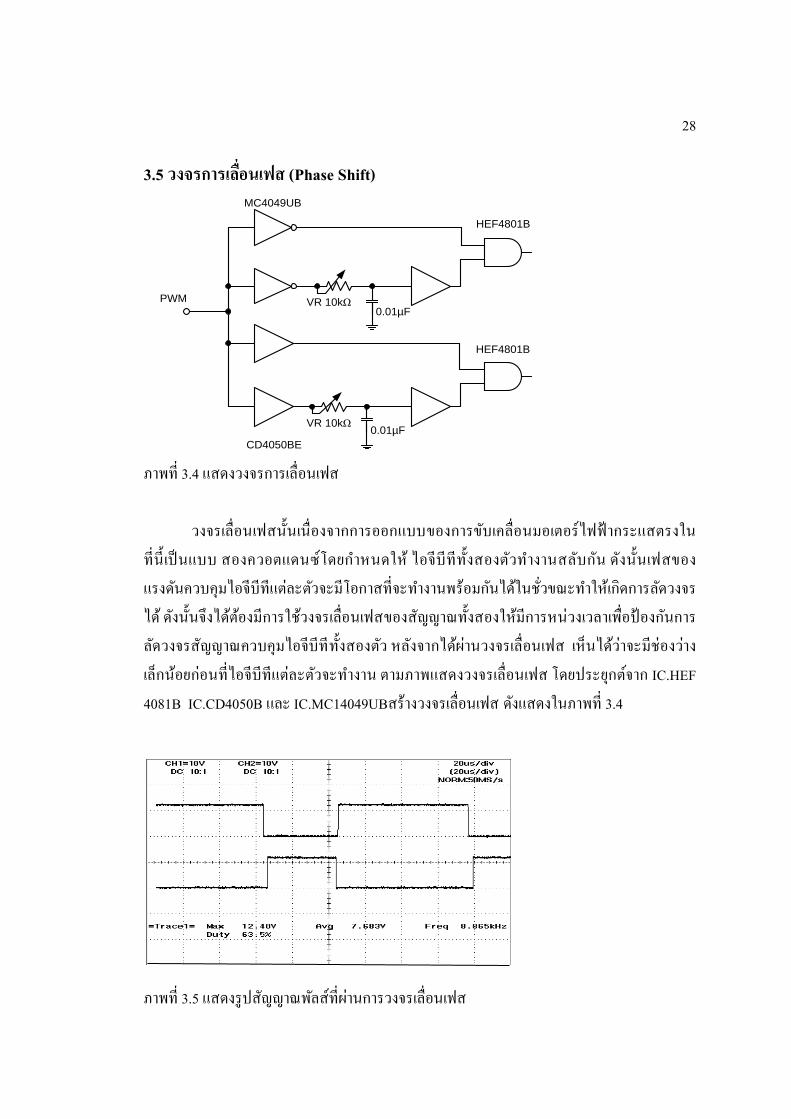
3.5 วงจรกำรเลอนเฟส (Phase Shift)
PWM
MC4049UB
HEF4801B
VR 10kΩ
VR 10kΩ
0.01µF
0.01µF
CD4050BE
HEF4801B
ภาพท 3.4 แสดงวงจรการเลอนเฟส
วงจรเลอนเฟสนนเนองจากการออกแบบของการขบเคลอนมอเตอรไฟฟากระแสตรงใน
ทนเปนแบบ สองควอตแดนซโดยก าหนดให ไอจบทท งสองตวท างานสลบกน ดงนนเฟสของแรงดนควบคมไอจบทแตละตวจะมโอกาสทจะท างานพรอมกนไดในชวขณะท าใหเกดการลดวงจรได ดงนนจงไดตองมการใชวงจรเลอนเฟสของสญญาณทงสองใหมการหนวงเวลาเพอปองกนการลดวงจรสญญาณควบคมไอจบททงสองตว หลงจากไดผานวงจรเลอนเฟส เหนไดวาจะมชองวางเลกนอยกอนทไอจบทแตละตวจะท างาน ตามภาพแสดงวงจรเลอนเฟส โดยประยกตจาก IC.HEF 4081B IC.CD4050B และ IC.MC14049UBสรางวงจรเลอนเฟส ดงแสดงในภาพท 3.4
ภาพท 3.5 แสดงรปสญญาณพลสทผานการวงจรเลอนเฟส

29
ภาพแสดงรปสญญาณพลสทผานการเลอนเฟสโดยเอาทพทจะแสดงในภาพคอภาพสญญาณสองควอตแคนซ โดยการปรบเลอนเฟสใหมการท างานหนวงเวลาอยท 2 µs เนองมาจากคณสมบต ของไอจบทในแตละตวจะเรมท างานเมอหลงจากมสญญาณทรกทขาเกทแลวนบจากนนเปนเวลาไปอก 2 µs ไอจบทจงจะเรมน ากระแสดงนนจงตองมการเลอนเฟสเพอไมใหไอจบทอกตวหนงท างานในขณะทอกตวหนงท างานอยเพอไมใหเกดความเสยหายแกวงจร ดงภาพท 3.5
3.6 วงจรขบเกท ไอจบท (Gate driver circuit)
M
Vdd 12 V
100
100 k
87
5
TLP250
Vm 36 V
Vee 12 V100
100 k
87
5
TLP2502
2
-
+F
ast D
ioe
d 1
Fa
st D
ioe
d 2
D+
D-
3
3
ภาพท 3.6 แสดงวงจรขบเกทไอจบท เปนวงจรทท าหนาทขยายสญญาณ พ.ดบเบลย.เอม. (P.W.M.) เพอใชในการควบคมการท างานของไอจบท (IGBT) (Insulated - Gate Bipolar Transistor)ในทนใชเบอร IGBT 40 U 600V จะเหนวาเพม Fast Diode เปนอปกรณในการคนพลงงานกลบ Revcovery ในแตละตวของ State ของตวไอจบทดงแสดงในภาพท 3.6

30
บทท4
กำรค ำนวณคำสมประสทธของรถจกรยำนยนตไฟฟำ
การทรถไฟฟานนเคลอนทไดนนตองอาศยก าลงของมอเตอร ทสงผานระบบสงก าลงมาทลอเพอใชในการขบเคลอน ขณะทรถไฟฟาเคลอนทนนจะมแรงตานการเคลอนทโดยจะมทศทางทสวนทางกบแรงขบเคลอน ทดวยความเรวคงทเชน 40 กโลเมตร/ชวโมง เราสามารถทจะหาคาแรงขบเคลอนไดโดยอาศยกฎขอท 1 ของนวตนจะไดวา แรงขบเคลอน=แรงตานทงหมด (4.1) โดยทถาแรงในการขบเคลอนมากกวาแรงตานทงหมดรถไฟฟาจะมอตราเรวมากขน อาจท าไดโดยการกดปมบงคบการเรงเพอเพมกระแสไฟฟาใหกบมอเตอรจะท าใหแรงขบเคลอนทลอมากขน และถาแรงขบเคลอนนอยกวาแรงตานทงหมดรถไฟฟาจะมอตราเรวทลดลงในขณะทอตราเรวลดลงนน แรงตานทงหมดจะลดลงดวยจนในทสดจนแรงขบเคลอนจะเทากบแรงตานทงหมดของรถไฟฟาจะวงดวยอตราเรวคงทตอไป ซงแรงตานเหลานนไดแก แรงตานการหมดลอ (Rolling Resistance) แรงตานอากาศ (Air Resistance) แรงตานทางชน (Gradient Resistance) นอกจากนนในขณะเรงมอเตอร ก าลงบางสวนตองสญเสยไปเพอเอาชนะความเฉอยของรถไฟฟา เรยกวา แรงตานเฉอย(Inertia Resistance)
4.1 แรงตำนกำรหมนของลอ
ก าลงจากมอเตอรทลอขบเคลอน จะถกใชไปเพอเอาชนะแรงตานการหมนของลอ การหาแรงตานการหมนของลออาจท าไดโดยการออกแรงดนรถไฟฟาใหเคลอนทไปดวยอตราเรวคงทคาหนงแรงทใชในการดนรถไฟฟาจะมคามากหรอนอยขนอยกบสงตอไปน

31
ตารางท 4.1 แสดงความสมพนธระหวางสภาพถนน และคาสมประสทธ Kr[4]
สภำพถนน คำสมประสทธ สภาพด 0.01-0.016
ถนนเปนกรวด 0.015-0.020 ถนนไมอดกนเรยบ 0.020-0.030
ถนนเปนหน 0.016-0.07 ถนนเปนทราย 0.15-0.3
4.2 แรงตำนทำงอำกำศ
ก าลงจากมอเตอรทใชในการขบเคลอนทลอสวนมากตองใชไปเพอเอาชนะแรงตานอากาศโดยเฉพาะอยางยงทอตราเรวสงๆ แรงตานอากาศจะเกดขนเมอรถจกรยานยนตไฟฟามการเคลอนทและจะมากหรอนอยขนอยกบรปทรง อตราพนทหนาตดของรถจกรยานยนตไฟฟา สตรทใชในการค านวณเพอหาแรงตานอากาศ
Ra = Ka.A.V2 (4.2)
เมอ Ra = แรงตานอากาศ, Ka = สมประสทธแรงตานอากาศ(0.031)
A = ทหนาตดของรถไฟฟา,
V = อตราเรวรถไฟฟา,km/h เนองจากพนทหนาตดของรถจกรยานยนตไฟฟานนไมเปนสเหลยม คอ มสวนเวาโคงตามความสวยงามของรถการออกแบบจงท าใหไมสามารถหาพนทหนาตดของรถจกรยานยนตไฟฟาไดอยางถกตองดงนนจงท าไดโดยวธประมาณ
A = 0.78Ba.Ha (4.3)
เมอ A = พนทหนาตดรถไฟฟา,𝑚2
Ba = ความกวางของรถไฟฟา,m
Ha = ความสงของรถไฟฟา,m

32
4.3 แรงตำนทำนทำงชน
ในขณะทรถไฟฟาวงขนทางชน ก าลงของมอเตอรบางสวนตองถกใชไปเพอเอาชนะแรงตานทางชน ท าใหมอเตอรตองท างานหนกมากขนกวาวงบนทางระดบ แตในทางกลบกบรถไฟฟาวงในทางลาดมอเตอร จะท างานเบาขนเพราะมแรงเสรม เนองจากน าหนกรถไฟฟาท าใหรถไฟฟาเคลอนทไดเอง แรงตานทางชนเกดมากนอยขนอยกบ
1 น าหนกของรถไฟฟา 2 ความชนของถนน
สามารถหาแรงตานทางชนสตร Rg = W sin θ (4.4) เมอ Rg = แรงตานทางชน,N W = น าหนกของรถไฟฟา,N
sin θ = ความชน
4.4 แรงตำนรวม
ในหวขอนจะกลาวถงแรงตานรวมคอแรงตานในการขบเคลอนและถาแรงขบเคลอนนอยกวาแรงตานทงหมดรถจกรยานยนตไฟฟาจะไมสามารถขบเคลอนได
Rt = Rr + Ra + Rg (กรณคดรวมแรงตานทางชน) (4.5) Rt = Rr + Ra (กรณทางเรยบ) (4.6)
4.5 ก ำลงไฟฟำทใชในกำรขบเคลอน
ค านวณหาก าลงไฟฟาทใชในการขบเคลอน เพอใหไดความเรวท 40 กโลเมตรตอชวโมง
ตามความตองการเนองจากรถวงดวยอตราเรงคงท โดยแรงขบเคลอนทลอ F = หาไดจาก Rt ก าลงขบเคลอนทลอหาไดจาก
Pw = 𝐹𝑉
3.6 (4.7)

33
โดยท Pw = ก าลงเคลอนทลอ W
F = แรงขบเคลอน N V = ความเรวทใช km/h
4.6 ทอรคและก ำลงทสงได
ในการสรางรถจกรยานยนตไฟฟาตองค านงถงทอรคของมอเตอรเพอใหสามารถรบโหลดตามการออกแบบรถจกรยานยนตไฟฟา
Te = 60 𝑃𝑚
2𝜋𝑁 (4.8)
โดยท Tm = ทอรค Pm = ก าลงของมอเตอร
N = จ านวนรอบตอวนาท
4.7 ค ำนวณหำขนำดแบตเตอรทใช
รถจกรยานยนตไฟฟาตองใชพลงงานจากแบตเตอรในการขบเคลอนจงตองค านวณใหไดคากระแสทมอเตอรตองการเพอประสทธภาพการท างานของมอเตอรทสมบรณ
Ia = 𝑃𝑒
𝐶𝑎 (4.9)
เมอ Ia = กระแสทใช Pe = ก าลงมอเตอร
Ca = เซลลแบตเตอร
4.8 กำรค ำนวณและกำรออกแบบ
ในการสรางรถจกรยานยนตไฟฟานนตองมการออกแบบเพอใหไดขอบเขตของโครงสราง
ตางทสวยงานและ มความส าคญในทางวศวกรรมทเหมาะสม
น าหนกรถ 45 kg รศมลอ 0 .19 m
34
พนทหนาตดรถ 0.94 x 0.6 m2
สมประสทธในการตานอากาศ 0.031 คดทความเรวประมาณ 40 km/h
4.9 กำรค ำนวณหำแรงตำนทงหมดจำก
การขบเคลอนรถจกรยานยนตไฟฟานนกลาวถงแรงตานรวมคอแรงตานในการขบเคลอน
และถาแรงขบเคลอนนอยกวาแรงตานทงหมดรถจกรยานยนตไฟฟาจะไมสามารถขบเคลอนได
Rt = Rr + Ra + Rg (4.10) โดยท Rt = แรงตานทานทงหมด
Rr = แรงตานการหมนของลอ Ra = แรงตานทานอากาศ
Rg = แรงตานทานความชน
แรงตำนกำรหมนของลอหำไดจำก
Rr = Kr x W (4.11)
โดยท Kr = สมประสทธแรงตานการหมนของลอ(0.015) V = ความเรว km/ h W = น าหนกรถ ∴ Rr = 0.015 x 150 x 9.81 = 22.07 kN
แรงตำนทำนอำกำศหำไดจำก
Ra = Ka.A.v2 (4.12)
โดยท Ka = สมประสทธแรงตานทานอากาศ(0.031) A = พนทหนาตดรถ m2
V2 = ความเรว
∴ Ra = 0.031 x 0.564 x 402 = 27.97 kN

35
แรงตำนทำนควำมชน
Rg = mg sin θ (4.13) โดยท m = น าหนก kg g = คาโนมถวง sin θ = มมความชน 15 องศา ∴ Rg = 150 x 9.81 sin 15 = 380.85 kN
คำควำมตำนทำนรวมทงหมดมคำเทำกบ
Rt = 22.07 + 27.97 + 380.85 = 430.89 kN (กรณทางชน) (4.14) Rt = 22.07 + 27.97 = 50.04 kN (กรณทางเรยบ) (4.15) เลอก Rt = 50.04 kN (กรณทางเรยบ) เพราะโครงงานนออกแบบใหใชส าหรบทางเรยบ)
4.10 ค ำนวณหำก ำลงไฟฟำทใชในกำรขบเคลอน
ค านวณหาก าลงไฟฟาทใชในการขบเคลอน เพอใหไดความเรวท 40 กโลเมตรตอชวโมง
ตามความตองการเนองจากรถวงดวยอตราเรงคงท สมการ
โดยทแรงขบเคลอนทลอ F = หาไดจาก Rt ก าลงขบเคลอนทลอหาไดจาก
Pw = FV
3.6 (4.16)
โดยท Pw = ก าลงเคลอนทลอ W F = คาความตานทาน V = ความเรวทใช km/h
Pw = 50.04x40
3.6 = 556 W

36
4.11 ค ำนวณหำสมรรถนะของรถ
ก าลงมอเตอรหาไดจาก Pm =
100𝑥𝑃𝑤
ประสทธภาพ (4.17)
โดยท Pm = ก าลงมอเตอร Pw = ก าลงขบขทลอ ประสทธภาพ = คดท 90 %
Pm = 100𝑥556
90 = 617.77 W
มอเตอรขนาด เลอกใช 750 W
4.12 ขบเคลอนรถไฟฟำใหไดควำมเรวทเรำตองกำร
N = (𝑣)(1000)
(2𝜋𝑟)(60) (4.18)
V = ความเรวรถไฟฟา km / h r = รศมลอรถรวมยาง 0.19 m เมอตองการใหรถวงทความเรว (V) 60 km / h
N = (60)(1000)
(2𝜋)(0.19)(60)
= 837.65 r.p.m
4.13 ค ำนวณหำกระแสมอเตอรทใช
P = VI (4.19) เมอแรงดน (V) = 36 โวลท(V)
I = 𝑃
𝑉 (4.20)
I = 750
36 = 20.83 A

37
4.15 กำรวงมอเตอรและโครงสรำงของรถจกรยำนยนต
ภาพท 4.1 (ก) แสดงการออกแบบวางมอเตอรโดยใชโซเปนตวสงก าลง
ภาพแสดงการตดตงมอเตอรไวทลอหลงโดยใชโซเปนตวสงก าลงจากเฟองหนาตดกบตว
มอเตอรไปยงเฟองหลงซงตดกบลอหลงของรถจกรยานยนตไฟฟา ขนาดเฟองเปน 1:3 คอ เฟอง
หนา 11 ฟน และขนาดเฟองหลง 33 ฟน ดงแสดงในภาพท 4.1(ก)
ภาพท 4.1(ข) ภาพแสดงการแปลงคาความตานทานขนาด 10 kΩ เขากบแานลของรถจกรยานยนต
จากภาพนจะเปนการดดแปลงตวตานทานปรบคาไดแบบโวลตลมไปตดตงบรเวณทจบ
ดานขวาตอสายออกจากกลองควบคมดงแสดงในภาพท 4.1(ข)

38
บทท 5
กำรทดลองและผลกำรทดลอง
จากทไดออกแบบตวขบเคลอนมอเตอรไฟฟากระแสตรงแบบ 2 ควอตแดนซแลวนนในบทนจะน าตวควบคม และตวขบเคลอนมอเตอรมาท าการทดลองควบคมมอเตอรไฟฟากระแสตรง ขนาด 750 วตต 36 โวลต การทดลองการควบคมมอเตอรไฟฟากระแสตรงแบบกระตนแยกจะทดลองกบมอเตอรไฟฟากระแสตรง ดงนรายละเอยดของอปกรณทใชทดลองน
5.1 มอเตอรทใชท ำกำรทดลอง
5.1.1 มอเตอรไฟฟำกระแสตรงแบบกระตนแยก (Seprated Excited D.C. Motor) ขนาดของมอเตอรไฟฟากระแสตรงทใชในการทดลอง มพกดตามตารางท 5.1
ตารางท 5.1 แสดงขนาดของมอเตอรไฟฟากระแสตรงทใชในการทดสอบการขบเคลอน
5.1.2 แบตเตอรกระแสตรง (battery) - แบตเตอรไฟฟากระแสตรง (D.C. 36 โวลต ใชส าหรบขบมอเตอร) - ขบเคลอนวงจรสรางสนามแมเหลก
5.2 กำรทดลองวงจรขบเคลอนมอเตอร
การทดลองน มจดประสงคเพอตรวจสอบสญญาณเอาทพทของวงจรขบเคลอนมอเตอรไฟฟากระแสตรง แบบชอปเปอร โดยการควบคมแรงดนของวงจรอารเมเจอร 5.2.1 ตอวงจรตามภาพท 3.1 น าตววงจรขบมอเตอรไฟฟากระแสตรงมาตอเชอมเขากบมอเตอรไฟฟากระแสตรงแบบกระตนแยก ซงภายในของตวขบเคลอนมอเตอรไฟฟากระแสตรง
แรงดนพกด 36 โวลต(V) กระแสพกด 20.83 แอมแปร(A) ความเรวรอบ 2500 ความเรวรอบ(rpm) ก าลงไฟฟา 750 กโลวตต(kw)

39
แบบชอปเปอรจะประกอบดวยตวก าเนดสญญาณ พ.ดบเบลย.เอม (P.W.M), ตวขบเกทและวงจร ชอปเปอร และวงจรสรางสนามแมเหลกตามพกดของมอเตอร 5.2.2 ปรบแรงดนของแหลงจายแรงดนของวงจรอารเมเจอรและวงจรสรางสนามแมเหลกตามพกดของมอเตอร 5.2.3 การควบคมทอารเมเจอร (Armature Control) เปนการควบคมความเรวอยในชวงพกดโดยจะใชแรงดนทขดลวดสนามคงท เมอปรบต าแหนงเปรยบเทยบของอารเมเจอรไปท 25เปอรเซนต 50 เปอรเซนต และ 75 เปอรเซนต จะเหนวามอเตอรจะเปนความเรวขน 5.2.4 การควบคมทขดลวดสนาม(Field Control)เปนการควบคมความเรวสงกวาพกดโดยใหแรงดนทอารเมเจอรคงทเมอปรบตามต าแหนงเปรยบเทยบของขดลวดสนามไปท25เปอรเซนต 50 เปอรเซนต และ 75 เปอรเซนต เทานน คอความเรวมอเตอรจะสงขน 5.2.5 แสดงรปสญญาณแรงดนทอารเมเจอรและกระแส ซงในรปสญญาณของแรงดนจะเหนไดวามการกระเพอมของสญญาณ(Overshoot)อยบางเลกนอยซงเปนผลมาจากสภาวะชวขณะ(Transient)
5.3 ผลกำรทดลอง
การทดลองของโครงงานน พกดแรงดนของมอเตอรจะอยท 36 โวลต กระแสตรง ตารางท 5.3 บนทกผลการทดลอง
จากการทดลอง ทดสอบดวตไซเคลตงแต 25, 50 และ 75 เปอรเซนต
Duty Cycle Voltages
25 % 9.18 V
50 % 16.97 V
75 % 27.08 V
จากตารางผลการทดลองจะเหนไดวาเมอความกวางของพลสเพมขน แรงดนทตกครอมทขดลวดอารเมเจอรกจะเพมขนตามไปดวยเปนผลท าใหความเรวรอบของมอเตอร(Speed)จะเพมขนตามล าดบไปจนถงความเรวพกดของมอเตอร ณ แรงดนทจายให

40
กำรทดลองวดสญญำณดวตไซเคลเทยบกบแรงดนทจำยใหมอเตอร
การทดลองปรบดวตไซเคลท 25 เปอรเซนต
ภาพท 5.1 สญญาณแรงดนและสญญาณกระแสทความกวางของพลสท 25 เปอรเซนต
ภาพแสดงสญญาณการปรบภาพสญญาณแรงดนทขวของอารเมเจอรเมอจายแรงดนไฟฟากระแสตรงใหกบมอเตอรจากในภาพนเปนการปรบดวตไซเคลท 25 เปอรเซนตจะเหนวามการเกดกระเพอมของสญญาณ (Overshoot) ทสงมากๆเนองจากในการขบมอเตอรนมโหลดของมอเตอรอยดวยจงมการเกดกระเพอมของสญญาณสง เปนอกเทาของรปพลสของสญญาณชอปเปอรสญญาณทกระเพอมนถามมากอาจท าใหเกดความเสยหายกบวงจรได ดงแสดงในภาพท 5.1
ภาพท 5.2 รปคลนแรงดนเอาทพททความกวางของพลสท 25 เปอรเซนตจะเหนการเกด Over shoot
ภาพขยายของสญญาณ (Overshoot) ทเกดจากการปรบดวตไซเคลท 25 เปอรเซนต จะเหนวามการเกดแรงดนพงเกนเปนสองเทาของแรงดนทใชงานอยเนองจากการปดของสวตชของไอจบทใน

41
ชวขณะผออกแบบจงตองค านงถงรายละเอยดในจดนเพอใชในการออกแบบไอจบททเหมาะสมมาใชงานทสามารถทนแรงดนพงเกนไดจะไมท าใหไอจบทเสยหาย ดงจะแสดงไวในภาพท 5.2
การทดลองปรบดวตไซเคลท 50 เปอรเซนต
ภาพท 5.3 รปคลนแรงดนเอาทพททความกวางของพลสท 50 เปอรเซนต ภาพแสดงสญญาณการปรบภาพสญญาณแรงดนทขวของอารเมเจอรเมอจายแรงดนไฟฟากระแสตรงใหกบมอเตอรจากในภาพนเปนการปรบดวตไซเคลท 50 เปอรเซนต จะเหนวาสญญาณพลสมความกวางเพมขนและในทางเดยวกนกจะมการเกดแรงดนพงเกน (Overshoot) ทสงมากๆเนองจาก ในการขบมอเตอรนมโหลดของมอเตอรอยดวย จงมการกระเพอมของสญญาณสงเปนสองเทาของรปพลสของสญญาณชอปเปอรสญญาณพงเกนนถามมากอาจท าใหเกดความเสยหายกบวงจรได ดงแสดงในภาพท 5.3
ภาพท 5.4 รปคลนแรงดนเอาทพททความกวางของพลสท 50 เปอรเซนตจะเหนการเกด Overshoot ภาพขยายของสญญาณ(Overshoot) ทการปรบดวตไซเคลท 50 เปอรเซนต จะเหนวามการ
เกดแรงดนพงเกนเปนสองเทาของแรงดนทใชงานอยเนองจากการปดของสวตชของไอจบทในชวขณะผออกแบบจงตองค านงถงรายละเอยดในจดนเพอใชในการออกแบบไอจบททเหมาะสมกบ

42
การน ามาใชงานทสามารถทนแรงดนพงเกนนไดจะไมท าใหเกดความเสยหายแกอปกรณไอจบท ดงแสดงในภาพท 5.4
การทดลองปรบดวตไซเคลท 75 เปอรเซนต
ภาพท 5.5.สญญาณแรงดนและสญญาณกระแสทความกวางของพลสท 75 เปอรเซนต ภาพแสดงสญญาณการปรบภาพสญญาณแรงดนทขวของอารเมเจอรเมอจายแรงดนไฟฟากระแสตรงใหกบมอเตอรจากในภาพนเปนการปรบ ดวตไซเคลท 75 เปอรเซนตจะเหนวาสญญาณพลสมความกวางเพมขนและในทางเดยวกนกจะมการเกดกระเพอมของสญญาณ (Overshoot) ทสงมากๆตามเนองจากในการขบมอเตอรน มโหลดของมอเตอรซงเปนขวดลวดดวยจงท าใหมการเกดกระเพอมของสญญาณสงเปนอกเทาของรปพลสของสญญาณชอปเปอรสญญาณทกระเพอมนถามมากอาจท าใหเกดความเสยหายกบวงจรได ดงแสดงในภาพท 5.5
ภาพท 5.6 สญญาณแรงดนและสญญาณกระแสทความกวางของพลสท 75 เปอรเซนตจะเหนการ
เกด Overshoot

43
ภาพขยายของสญญาณ (Overshoot) ทการปรบดวตไซเคลท 75 เปอรเซนตจะเหนวามการเกดแรงดนพงเกนของสญญาณชวขณะ (Tran Sient) แตจะสงเกตไดวาแรงดนพงเกนนจะมนอยกวาการปรบดวตไซเคลท 50 เปอรเซนตเนองจากมอเตอรหมนดวยความเรวรอบสงจงท าใหสภาวะแรงดนพงเกนชวขณะนนมนอยกวาการปรบดวตไซเคลทคานอยๆแรงดนพงเกนชวขณะนหาไดจาก 𝑑𝑣
𝑑𝑡 และ 𝑑𝑖
𝑑𝑡 จะเปนการเปรยบเทยบของแรงดนกบเวลาและกระแสกบเวลาเพอหาเวลาในการเกด
ของสญญาณพงเกนกอนเขาสสภาวะคงตววาเกดใชเวลานานเทาใด

44
บทท6
สรปและขอเสนอแนะ
จากการท าโครงรถจกรยานยนตไฟฟานไดน ามอเตอรไฟฟากระแสตรงมาตดต ง ในโครงสรางรถจกรยานยนตใหเหมาะสมส าหรบตดตงมอเตอรดซ 36 โวลตส าหรบขบเคลอนการตดตงมอเตอรไวทลอหลงโดยใชโซเปนตวสงก าลงจากเฟองหนาตดกบตวมอเตอรไปยงเฟองหลงซงตดกบลอหลงของรถจกรยานยนตไฟฟา ขนาดเฟองเปน 1:3 คอ เฟองหนา 11 ฟน และขนาดเฟองหลง 33 ฟน โดยใชวงจร ชอปเปอร 2 ควอตแดนซ มาเปนวงจรควบคม ออกแบบชดวงจรควบคม โดยใชไอซเบอร MC34060AD ในการสรางสญญาณ PWM และชดวงจรเลอนเฟสสญญาณโดยใชไอซเบอร HEF4081b, MC14049ub และ CD4050be และในสวนของการขบมอเตอรใช TLP 250 และ IGBT เบอร IRG4PC40Uสามารถปรบ ดวตไซเคลไดตงแต 1 เปอรเซนต ถง 99 เปอรเซนต เพอปอนใหกบไอจบทซงท าหนาทเปนตวสวตชชง ใหแกวงจร ทใชในการควบคมการไหลของกระแสเขาสมอเตอร ถาดวตไซเคลมคานอย กระแสจะไหลนอย มอเตอรจะหมดชา ท าความเรวนอย แตถาดวตไซเคลมคามาก กระแสกไหลมาก มอเตอรจะหมดไดเรว ท าใหความเรวมมากขน ซงรถจกรยานยนตไฟฟาน สามารถวงดวย น าหนกรถจกยานยนตกบน าหนกคน ไมเกน 150 กโลกรม จากการทผท าโครงงานนไดท าการขบข ในการขบขนนไมควรปรบระดบความเรวแบบเฉยบพลน เพราะจะเกดแรงดนพงเกนสงมาก อาจท าให IGBT เสยหาย จงตองคอยๆปรบทละนอย เพอปองกนการเกดแรงดนพงเกนสง รถวงท าความเรวไดประมาณ 40 กโลเมตรตอชวโมง จากการทดสอบโดยขบขแบบตอเนอง แบตเตอรสามารถใชงานไดประมาณ 45 นาทถาตองการใหยนระยะเวลาการใชงานของแบตเตอรสามารถออกแบบทวางแบตเตอรใหบรรจไดมากกวาน เนองจากมอเตอรทใชงานอย ยงมปญหาในจงหวะการขบขนทางลาดชน ฉะนนตองการใหจกรยานยนตมก าลงขบมากขนควรใชมอเตอรทมก าลงขบมากกวา 750 วตต ตวโครงรถนนยงมน าหนกมากเกนไป คอ ประมาณ 45 กโลกรม ควรออกแบบใหรถมน าหนกลดลง

45
เอกสำรอำงอง [1] Mhammad H.Rashid , Power Electronics circuit , Devices , and Application , Pentice
Hall , 1993
[2] มงคล ทองสงคราม.,2543. อเลกทรอนกสก าลง. พมพครงท 4 . กรงเทพ:ว เจ พรนตง
[3] OGATA , MODERN CONTROL ENGINEERING Pentice – Hall , 1990

46
ภำคผนวก
Data Sheet