a thermodynamic finite-strain model for pseudoelastic shape memory alloys
TRANSCRIPT

International Journal of Plasticity 22 (2006) 1658–1682
www.elsevier.com/locate/ijplas
A thermodynamic finite-strain model forpseudoelastic shape memory alloys
Ch. Muller, O.T. Bruhns *
Institute of Mechanics, Ruhr-Universitat Bochum, Gebaude IA, Raum 3/26,
Universitatsstrasse 150, D-44780 Bochum, Germany
Received 3 July 2005; received in final revised form 21 November 2005Available online 29 March 2006
Abstract
A thermodynamic finite-strain model describing the pseudoelastic response of shape memoryalloys is proposed. The model is based on a self-consistent Eulerian theory of finite deformationsusing the logarithmic rate. Purely elastic material response is derived from a hyperelastic potential.The mass fraction of martensite is introduced as internal state variable to indicate the thermome-chanical state of the phase transforming material. The evolution of martensite is governed by akinetic law which is derived from the Helmholtz free energy of the two-phase solid and takes the heatgenerated during phase transition into account. The material model is implemented into a finite ele-ment code in an updated Lagrangian scheme and calibrated to experimental data. Simulations underdifferent loading conditions illustrate the characteristics of the model.� 2006 Elsevier Ltd. All rights reserved.
Keywords: Pseudoelasticity; Eulerian formulation; Logarithmic rate
1. Introduction
In the description of shape memory alloys, the choice of an appropriate kinematicframe has been disregarded frequently. Instead, the focus was mainly on finding a suitablemethod to adequately model the phase transformation of shape memory alloys. These
0749-6419/$ - see front matter � 2006 Elsevier Ltd. All rights reserved.
doi:10.1016/j.ijplas.2006.02.010
* Corresponding author. Tel.: +49 234 32 23080; fax: +49 234 32 14229.E-mail address: [email protected] (O.T. Bruhns).

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1659
efforts lead to a number of different models, some of which are even applicable to pseudo-plasticity and two-way shape memory effect in addition to pseudoelasticity. Common tomost of these models are the simplifications of a kinematic theory of small strains. Thepresent model tries to overcome this shortcoming in combining a solid description ofthe physics of pseudoelastic phase transformations with an adequate kinematic frame(cf. Muller, 2003). It is based on the notions of the thermodynamic theory by Ranieckiet al. (1992); Raniecki and Lexcellent (1998); Raniecki et al. (2001) (see also Rejzneret al., 2002), but formulated within an Eulerian scheme of finite deformations recently pro-posed by Xiao et al. (1997a,b, 1998a,b).
A detailed introduction to the complex behaviour of shape memory alloys, differentphysical phenomena observed and different models to describe these observations fromvarious perspectives has been given by Muller (2003). This paper also comprises an elab-orate compilation of the relevant literature on shape memory alloys. Some very recentcontributions to the phenomenological description that has been preferred in the presentwork were reported by Iadicola and Shaw (2004), Lovey et al. (2004), Liu et al. (2006),Panoskaltsis et al. (2004), Bouvet et al. (2004), Helm and Haupt (2003), Helm (2005),and Muller and Seelecke (2001), Qidwai et al. (2001), Peng et al. (2001), Thamburajaand Anand (2001), Bo and Lagoudas (1999a,b,c,d), Souza et al. (1998), Huang andBrinson (1998), and Peyroux et al. (1998).
The analysis of the complex stress states in today’s shape memory applications such asmedical stents clearly requires three-dimensional theories adaptable to numerical solutionprocedures such as the finite element method. As the strains observed in shape memoryalloys are in the range of 10% for polycrystals (Gadaj et al., 1999; Shaw, 2000), use of alarge deformation scheme is reasonable. There is, however, only a limited number of the-ories of shape memory behavior within large deformation schemes. Auricchio and Taylor(1997, 1999) and Auricchio (2001) proposed a finite deformation theory based on the mul-tiplicative decomposition of the deformation gradient into an elastic part and a part asso-ciated with phase transformation. Disregarding martensitic reorientation, onlypseudoelasticity is within the scope of the model. The theory is based on the notions ofplasticity and is not embedded into a thermodynamic frame. Petho (2000, 2001) decom-poses the total deformation gradient into elastic, plastic, and phase transformation parts,describing elasticity using an integrable hypoelastic model based on the logarithmic rateproposed recently. A multiplicative decomposition of the deformation gradient is pro-posed by Helm as well (cf. Helm and Haupt, 2001, 2003; Helm, 2005). Here, a geometri-cally linear theory intended for the description of pseudoelasticity and one-way shapememory effect is extended to finite deformations.
It has been established experimentally that martensitic phase transformation is a ther-momechanically coupled process, with latent heat being generated during transformationto martensite. At the same time, the material behaviour is strongly dependent on temper-ature. The thermodynamically consistent model for pseudoelasticity presented here, basedon micromechanical observations, simulates these effects. It is formulated within a kine-matically consistent framework of finite deformations and accounts for the thermome-chanical coupling of the transformation process.
To validate the model and to illustrate its characteristics, the model was implementedinto a finite element code. Its parameters were calibrated to experimental data, resultingin a good agreement between model and experiment. The results of a more extensivenumerical analysis on real structures currently under way will be published separately.

1660 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
2. Kinematics
In this section, the fundamental kinematic relations are summarized briefly and appro-priate notations are introduced. A more detailed overview may be found in, e.g., Ogden(1984). The general kinematic frame used here is derived and elaborated in detail in Xiaoet al. (1997a,b, 1998a,b, 2000) and Bruhns et al. (2001).1
Let B define a body. A motion of this body is represented by a mapping ut : B! Bt,where t 2 R is the time and Bt is the current configuration at time t. We assume that thebody is identified with its configuration at time t = 0, which we refer to as the referenceconfiguration B0. At this reference configuration, every material particle X is associatedwith the position X 2 B0 and at the current configuration with x 2 Bt.
Consider now a smooth deformation process of B. Let F be the deformation gradientdescribing the local deformation relative to the reference configuration (cf. Xiao et al.,2006). The left Cauchy–Green tensor B is given by
B ¼ FFT; det F > 0; ð1Þand the velocity gradient L by
L ¼ _FF�1. ð2ÞThe symmetric and antisymmetric parts of the latter supply the stretching D and the
vorticity W, i.e.,
D ¼ 1
2Lþ LT� �
; W ¼ 1
2ðL� LTÞ. ð3Þ
Until recently it was believed that the stretching D, which is a natural, exact character-ization of the rate of change of the local deformation state,2 is not in general expressible asan objective corotational time derivative of any strain tensor. So it was not considered arate of strain (Ogden, 1984). However, it has been shown recently that this is no longertrue. It has been demonstrated (refer to, e.g., Xiao et al., 1997b, 1998a,b; Reinhardtand Dubey, 1995, 1996) that there exists one (and only one) unique solution to that prob-lem, namely, the logarithmic rate of the Eulerian Hencky strain h as
h�
log ¼ _hþ hXlog �Xlogh ¼ D. ð4ÞThe corotational rate of Hencky’s Eulerian strain defined by the logarithmic spin Xlog is
identical to the Eulerian stretching D, i.e. D is a true time rate of h in a corotating materialframe, and h is the only strain enjoying this property. In the above, the logarithmic rate isdefined by the logarithmic spin
Xlog ¼WþXn
r6¼s
1þ ðvr=vsÞ1� ðvr=vsÞ
þ 2
lnðvr=vsÞ
� �BrDBs ð5Þ
and the Eulerian Hencky strain h is introduced as a natural logarithmic measure of B (cf.Xiao et al., 1997b; Hencky, 1928)
1 A detailed resume of this Eulerian description for finite inelastic deformations is contained in the review-likearticle (Xiao et al., 2006).
2 Refer to, e.g., Haupt, 2002 for details.

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1661
h ¼ 1
2ln B ¼
Xn
r¼1
1
2ln vrBr; ð6Þ
where vr are the n distinct eigenvalues of the left Cauchy–Green tensor B and Br are the n
corresponding eigenprojections.Corotational rates of objective Eulerian tensors must be objective rate measures to
ensure that any superimposed rigid rotation has no effect on them (Truesdell and Noll,1992). Here, the so-called self-consistency condition is imposed as well, stating that foreach process of purely elastic deformation, a (hypoelastic) constitutive formulation of D
intended for characterizing elastic response must be exactly-integrable to yield an elastic,in particular, hyperelastic relation between elastic strain and stress (cf. Bruhns et al., 1999;Xiao et al., 1999, 2000). The above logarithmic rate exhibits this property too (cf. Xiaoet al., 1997a,b, 1998a,b), and thus will be used here.
The characterization of a strained state in an Eulerian description is based upon the(left) polar decomposition
F ¼ VR; V ¼ffiffiffiffiBp
; ð7Þwhere R and V are known as rotation tensor, and left stretch tensor, respectively. Usingthe logarithmic rotation Rlog, i.e. the proper orthogonal tensor defined by the linear ten-sorial differential equation
_Rlog ¼ �RlogXlog; Rlogjt¼0 ¼ 1; ð8Þthe following rotated correspondence applied to the Hencky strain h holds (Xiao et al.,2006)
_Rlog
Hh ¼ RlogHh�
log ¼ RlogHD; ð9Þ
where the kinematical relation (4) has been used, and where the starred product accordingto
QHh ¼ QhQT ð10Þdescribes an arbitrary (backward) rotation of tensor h subject to the arbitrary orthogonalsecond-order tensor Q.3
The left-hand side of Eq. (9) represents a material time rate of a Lagrangean quantity.This measure can be integrated with respect to time and rotated (forward) into the currentconfiguration to give
h ¼ ðRlogÞTH
Z t
0
RlogHDds. ð11Þ
Thus, corotational integration (refer, e.g., to Khan and Huang, 1995) of the stretchingD yields the Eulerian Hencky strain h.
For each process of elastic–inelastic deformation, the additive decomposition of thetotal stretching D into an elastic part De and a coupled elastic-phase transformation partDetr is postulated (Xiao et al., 2000)
3 This product is sometimes called Rayleigh product. Lord Rayleigh in his considerations about the scatteringof sunlight from particles in the atmosphere has used a similar expression to make this spherical problemindependent of the specific orientation.

1662 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
D ¼ De þDetr. ð12ÞThis additive decomposition was successfully applied to small and finite deformation
elastoplasticity theories (Drucker, 1988; Nemat-Nasser, 1983, 1992; Xiao et al., 2006)and is now proposed for pseudoelastic phase transformation.
3. Stresses and stress power
The stress power per unit volume at B0 is given by
_w ¼ Jr : D ¼ s : D. ð13ÞHere, r is the Cauchy stress and s = Jr the Kirchhoff stress, where J = detF is the Jaco-bian of the deformation.
Eq. (13) describes a physical quantity, the rate of work of the stresses on the body. How-ever, this expression for stress power is difficult to incorporate in the formulation of consti-tutive laws as it is based on the stretching D. Hence, to fulfill the conservation of energyrequirement in formulating constitutive laws, relation (4) is introduced in Eq. (13) to give
_w ¼ s : h�
log. ð14ÞThe additive decomposition of D (cf. Eq. (12)) also allows to split the rate of work accord-ing to
_w ¼ _we þ _wetr ¼ s : ðDe þDetrÞ, ð15Þwhere _we is related to the reversible part of the stress power
_we ¼ s : De ¼ s : he�
log ð16Þwith he as the reversible part of the Hencky strain.
We note in passing that with Eq. (14) the above mentioned shortcoming of the Eulerianformulation can be overcome, namely, the stretching D can be expressed as logarithmicrate of the Hencky strain h. This allows in a very straightforward manner to extend theclassical description of elastic–inelastic material for small deformations, including thewhole thermomechanical frame, to finite deformations. We therefore have to replace inthese relations the infinitesimal strain e by Hencky strain h and the material time derivativeof any tensorial quantity by the logarithmic rate of these tensors.
4. Constitutive formulation
4.1. General
In this section, a three-dimensional thermodynamic model for pseudoelasticity is pre-sented, following some fundamental ideas attributed to Muller (1989), Muller and Xu(1991) and Raniecki et al. (1992), and Raniecki and Lexcellent (1998). The model is basedon the self-consistent Eulerian theory for finite deformations using the logarithmic rate.
In a state of constrained equilibrium, the material sample attains an equilibrium statecorresponding to the prescribed external state variables, i.e., reversible Hencky strain he
and temperature H, when the internal variables are taken to be held fixed at any definiteset of values by imposing appropriate constraints. Under constant external loads, a

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1663
two-phase solid body B will thus remain at complete rest, even though in general B willnot be in a state of absolute equilibrium.
The rate of progression of any local microstructural rearrangement within the materialis dependent on the current stress state only through the thermodynamic force conjugateto the extent of that rearrangement (cf. Rice, 1971). However, considerations concerningthis kinetic aspect must be preceded by a characterization of the state of constrained equi-librium that is postulated here.
Specifically, the existence of the specific Helmholtz free energy w depending on theexternal state variables he and H and the set of internal state variables a is presumed4
w ¼ wðhe;H; aÞ. ð17ÞIn order to describe pseudoelasticity, the general set of internal variables a may be spec-
ified to include only one scalar variable. Here, in accordance with the thermodynamics ofmixtures, the mass fraction of martensite n is used
n ¼ mM
m; m ¼ mA þ mM. ð18Þ
The total mass of the phase transforming body is denoted by m and mA and mM are themasses of the austenitic and martensitic phases, respectively. Here and henceforth, quan-tities associated with the individual phase a will be denoted a = A (austenite) and a = M(martensite).
It is assumed that the current state is uniquely determined for prescribed n, given theexternal state variables he and H. Since the chemical composition of the phases doesnot change during processes of martensitic transformation, no internal variable account-ing for such effects is necessary. However, the scope of the present theory is confined topseudoelasticity as a consequence of considering one scalar internal variable. To accu-rately model one-way and two-way shape memory effects, additional variables arerequired, i.e. to represent the orientation of stress induced martensite or to capture theevolution of plastic eigenstrains.
In agreement with thermodynamics of mixtures the specific Helmholtz free energy instates of equilibrium may be written as a weighted sum of specific free energies of thetwo phases plus an additional term accounting for the interaction between them
wðhe;H; nÞ ¼ ð1� nÞwA þ nwM þ DAMw. ð19ÞDAMw results from the elastic misfit of differently oriented phase domains within the singlecrystal and the interaction of different martensitic systems (cf. Raniecki et al., 1992). Thewa are depending only on he and H, as they describe the single phase. They will be specifiedin the following.
4.2. Helmholtz free energy of a single phase
As stated above the specific Helmholtz free energies of the single phases are merelyfunctions of he and H. Thus, using classical arguments of meeting the second law of ther-modynamics in the form of the Clausius–Duhem inequality, the following individual stateequations will be obtained:
4 Note that, following Lehmann (1989), an explicit dependence of w on the elastic–inelastic part of the strainmeasure is excluded in contrast to the theory of Raniecki et al. (1992).

1664 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
s ¼ �owoH
����he
; s ¼ q0
owohe
����H
; ð20Þ
where s is the specific entropy and q0 the referential density. Moreover, for later use wedefine
C ¼ os
ohe ð21Þ
as tensor of elastic moduli. We note that contrary to usual considerations this tensor hereis still a temperature dependent quantity.
To derive the individual Helmholtz free energies, the specific heat at constant volume cv
is introduced. It is defined from the specific internal energy u through
cv ¼ouoH
����v
. ð22Þ
Taking the derivative of the Legendre transformation
w ¼ u�Hs ð23Þwith respect to temperature and substituting Eq. (22) as well as the state Eq. (20)1 yields
cv ¼ HosoH
. ð24Þ
Martensitic phase transformations in SMAs, characterized here by the mass fraction ofmartensite n, is approximately isochoric (cf. Shimizu and Tadaki, 1987). Therefore, thedefinition of cv at constant volume may equivalently be expressed as the specific heat atconstant reversible strain (cf. Oberste-Brandenburg, 1999)
cv ¼ HosoH
����he
. ð25Þ
Since cv is approximately constant for the temperature range of interest (see Fig. 1), inte-gration of Eq. (25) gives:
Fig. 1. Dependence of specific heat at constant volume on temperature. R is gas constant and HD Debyetemperature.
Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1665
s ¼ cv lnHH0
� �þ s0; ð26Þ
where H0 is a reference temperature. The constant s0 = s0(he), possibly dependent on thereversible strain, is left to be determined. Substitution of Eq. (20) into (26) and subsequentintegration yields
w ¼ cv H�H0 �H lnHH0
� �� �� s0ðH�H0Þ þ w0; ð27Þ
where a second constant w0 = w0(he) is introduced. To determine both constants, the ten-sor of elastic moduli C (Eq. (21)) is adopted. Then, following the considerations of Ober-ste-Brandenburg (1999), an expansion of C into a Taylor series about H0 gives:
C ¼ C0 �X1i¼1
1
i!ðH�H0ÞiCðiÞH ; ð28Þ
where the stiffness tensor at reference temperature C0 ¼ CðH ¼ H0Þ and its partialderivatives
CðiÞH ¼ �
oiC
oHi
����H¼H0
ð29Þ
are introduced. Taking the derivative of Maxwell’s relation
osohe
����H
¼ � 1
q0
os
oH
����he
ð30Þ
with respect to he and substituting Eqs. (21) and (26) yields a differential equation for s0
o2s0
ohe2 ¼1
q0
X1i¼1
1
ði� 1Þ! ðH�H0Þi�1CðiÞH . ð31Þ
Here, the referential density is denoted by q0. Integrating twice with respect to he anddenoting the constants of integration by b0 and s�0, respectively, gives:
s0ðheÞ ¼ 1
2q0
he :X1i¼1
1
ði� 1Þ! ðH�H0Þi�1CðiÞH
!: he þ b0 : he þ s�0. ð32Þ
Since s0 is independent of temperature, this relation may be simplified to yield
s0ðheÞ ¼ 1
2q0
he : CH : he þ b0 : he þ s�0; ð33Þ
where the first derivative of C with respect to H is written as
CH ¼ Cð1ÞH . ð34Þ
Due to the independence of s0 on temperature, all higher order derivatives must vanish.Therefore, the dependence of C on temperature is at most linear
C ¼ C0 � ðH�H0ÞCH. ð35ÞUsing Eq. (33), w0 introduced in Eq. (27) can be determined. Substitution of (27) into
the thermal state equation (20)2 and noting that Eq. (33) is a function of he, gives

1666 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
s ¼ q0
ow0
ohe � ðH�H0Þðhe : CH þ q0b0Þ. ð36Þ
Combination of this preliminary result with Eqs. (35) and (21) yields the differentialequation
q0
o2w0
ohe2 ¼ C0; ð37Þ
which may be integrated twice to give
w0 ¼1
2q0
he : C0 : he. ð38Þ
In deriving Eq. (38), use was made of the initial conditions
w0ðhe ¼ 0Þ ¼ 0;ow0
ohe ðhe ¼ 0Þ ¼ 0. ð39Þ
Based on the definition of the tensor of elastic moduli C the tensor b0 may beidentified
b0 ¼1
q0
a : C; ð40Þ
where a is the tensor of thermal expansion coefficients.At the thermodynamic reference state B�0, which is connected to the current state B
through a reversible process leading from B�0 to B, the specific Helmholtz free energy mustvanish. Hence, from Eq. (23) one obtains
u�0 ¼ H0s�0; ð41Þwhere u�0 and s�0, respectively, are the specific internal energy and the specific entropy atstress-free state. Using Eq. (35), substitution of Eqs. (38) and (33) with (40) and (41) spec-ifies the free energy function (27) of a single phase (Muller, 2003)
wa ¼ 1
2q0
he : C : he � ðH�H0Þ1
q0
a : C : he þ cv H�H0 �H lnHH0
� �� �þ u�0 � s�0H
� a
.
ð42Þ
The Helmholtz free energy is marked by the index a to indicate that it is a phase-specificquantity, as well as all quantities on the right-hand side of Eq. (42) are. To improve read-ability they are not marked individually, but they denote the material parameters orstrains of either austenite (a = A) or martensite (a = M), respectively.
Eq. (42) must be complemented by an appropriate definition of the elastic strain mea-sure he before the free energy of a single phase solid may actually be calculated. Such adefinition will be provided below.
4.3. Internal interaction in constrained equilibria
The free energy function obtained by combination of Eqs. (19) and (42) does notaccount for the hysteresis observed in martensitic phase transformations of shape memoryalloys. This hysteresis is attributed to the interfacial energy DAMw between martensitic andaustenitic domains in the body and includes phenomena such as the elastic misfit of the

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1667
individual phases and the energy of elastic interaction of neighbouring domains (Muller,1989; Muller and Xu, 1991).
There is no unique approach to derive an expression for DAMw. Instead of a microme-chanical approach which must be complemented by appropriate averaging procedures(Patoor et al., 1996; Niclaeys et al., 2002; Gall et al., 2000), a phenomenological theoryis adopted here (Raniecki et al., 1992). A configurational internal energy �uðnÞ and a con-figurational entropy �sðnÞ due to phase transformation are introduced to modify the inter-nal energy and entropy in Eq. (42), u�0 and s�0, respectively. Choosing the configurationalinternal energy and entropy to be linear functions of n with slopes �u0 and �s0 that approachzero as n tends to one (Raniecki et al., 1992), DAMw reads
DAMw ¼ nð1� nÞwitðHÞ with witðHÞ ¼ �u0 �H�s0 ð43Þas so-called free energy of interaction. Note that DAMw vanishes for n = (0, 1). The config-urational internal energy �u0 and entropy �s0 due to transformation are to be determinedexperimentally.
4.4. Helmholtz free energy of a two-phase solid
Eq. (19) defines the specific Helmholtz free energy of a two-phase solid from the freeenergies wa = wa(hea,H) of austenite and martensite, where for the individual phase athe intrinsic, phase specific elastic strain has to be calculated from the phase specific totalstrain as
hea ¼ ha � hetra. ð44ÞThe intrinsic elastic-phase transformation strain within the austenitic parent phase is
presumed to be zero, i.e.
hetrA ¼ 0. ð45ÞTo determine the intrinsic elastic-phase transformation strain of the martensitic phase, theintrinsic phase distortion j is introduced as a quantity possessing the properties of a strain.j is associated with the formation of martensite, which is characterized by negligiblechanges in volume (Shimizu and Tadaki, 1987). Hence, j is required to be traceless. Itmay be interpreted as an average measure of the distortions due to phase transformation(Raniecki and Bruhns, 1991; Raniecki et al., 1992), with the property
j : j ¼ g2 ¼ const., ð46Þwhere the material parameter g is the amplitude of pseudoelastic strain or pseudoelasticflow. The intrinsic elastic-phase transformation strain of martensite may then be defined as
hetrM ¼ j; trðhetrMÞ ¼ 0. ð47ÞTo obtain the Helmholtz free energy as a function of the strain of the two-phase solid, amixture rule is adopted for the strains
h ¼ ð1� nÞhA þ nhM. ð48ÞGiven the intrinsic elastic strains, the intrinsic stresses of austenite and martensite fol-
low from the caloric state equation. Utilizing the method of Lagrange multipliers, an anal-ysis of states of equilibrium within the two-phase region yields the equilibrium stress

1668 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
s ¼ sA ¼ sM. ð49ÞTo simplify the derivations below, it is further postulated that the thermoelastic propertiesof both phases are equal and approximately constant
C ¼ CA ¼ CM ¼ C0; a ¼ aA ¼ aM ¼ a0. ð50ÞThen, for states of equilibrium the phase chemical potential pf
0ðHÞ defined by
pf0ðHÞ ¼ wA � wM ð51Þ
may be reduced to
pf0ðHÞ ¼ Du� �HDs� with
Du� ¼ u�A0 � u�M0
Ds� ¼ s�A0 � s�M0
(ð52Þ
by virtue of Eqs. (42) and (49). Here, the specific internal energy of austenite (martensite)at stress-free state is denoted by u�A0 ðu�M0 Þ, and the specific entropy of austenite (martensite)at stress-free state by s�A0 ðs�M0 Þ. The phase chemical potential pf
0 represents the driving forcefor temperature-induced phase transformation at stress-free state (Raniecki et al., 1992).
From the intrinsic strains at equilibrium (Muller, 2003) the stress s at equilibrium maybe derived in terms of the total strain h, the phase distortion j and the absolute temper-ature H
s ¼ C0 : ðh� nj� a0ðH�H0ÞÞ ð53Þalong with the mass fraction of martensite n at equilibrium
n ¼ j : C0 : ðh� ðH�H0Þa0Þ þ q0ðpf0 � witÞ
j : C0 : j� 2q0wit
. ð54Þ
The equilibrium states considered are unstable. No real process of phase transforma-tion from n = 0 to n = 1 would proceed along a path defined by these equilibrium condi-tions, which imply decreasing stresses in connection with the evolution of martensite andincreasing strains (Muller and Xu, 1991) as depicted in Fig. 2. In fact, the description ofdeformation processes involving phase transformation relies on the idea of constrainedequilibria, where a priori the equilibrium relations cannot be presumed to hold. However,
Fig. 2. Stress–strain diagram at thermodynamic equilibrium.
Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1669
adopting the notion of so-called uniform stress models (Muller and Xu, 1991), the intrinsicstresses of both phases are assumed to be identical in states of constrained equilibrium aswell and Eq. (53) remains valid.
Inserting Eqs. (44), (45) and (47) into Eq. (48) gives
h ¼ he þ hetr; hetr ¼ nj. ð55ÞNoting Eqs. (42), (43) and (52), Eq. (19) yields the specific Helmholtz free energy of
constrained equilibria in the form
wðhe;H; nÞ ¼ 1
2q0
he : C0 : he � ðH�H0Þ1
q0
a0 : C0 : he þ cv H�H0 �H lnHH0
� �� �þ u�A0 �Hs�A0 � npf
0ðHÞ þ nð1� nÞwitðHÞ. ð56Þ
Hence, the stress s may be calculated by means of the thermal state equation
s ¼ q0
owohe ¼ ðhe � ðH�H0Þa0Þ : C0. ð57Þ
Employing the caloric state equation, the specific entropy of constrained equilibria is givenby
s ¼ � owoH¼ � 1
q0
a0 : C0 : he þ cv lnHH0
� �� nDs� þ nð1� nÞ�s0 þ s�A0 . ð58Þ
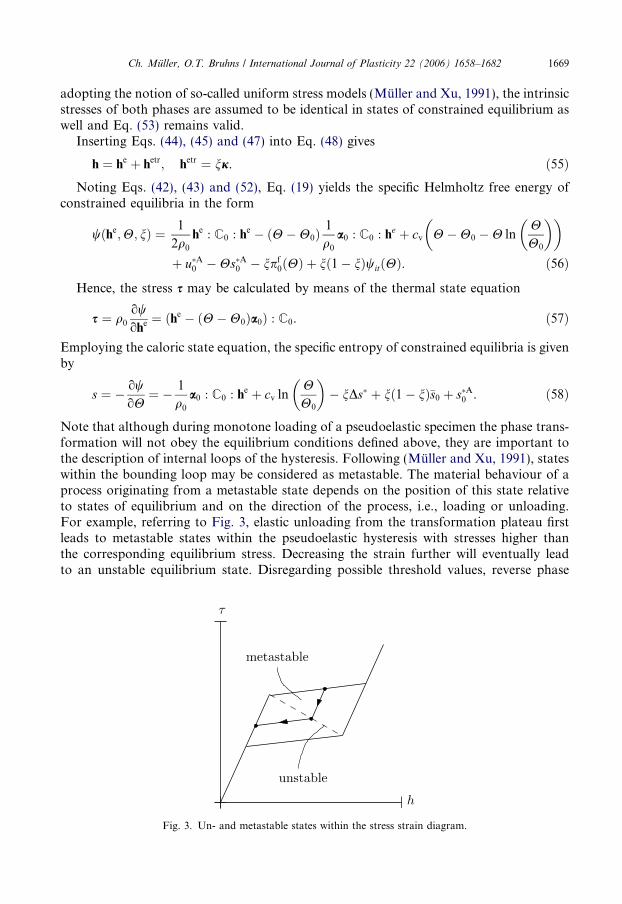
Note that although during monotone loading of a pseudoelastic specimen the phase trans-formation will not obey the equilibrium conditions defined above, they are important tothe description of internal loops of the hysteresis. Following (Muller and Xu, 1991), stateswithin the bounding loop may be considered as metastable. The material behaviour of aprocess originating from a metastable state depends on the position of this state relativeto states of equilibrium and on the direction of the process, i.e., loading or unloading.For example, referring to Fig. 3, elastic unloading from the transformation plateau firstleads to metastable states within the pseudoelastic hysteresis with stresses higher thanthe corresponding equilibrium stress. Decreasing the strain further will eventually leadto an unstable equilibrium state. Disregarding possible threshold values, reverse phase
Fig. 3. Un- and metastable states within the stress strain diagram.

1670 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
transformation will initiate from here. Reversing the strain rate results in the same behav-iour, first elastic loading, followed by a process of phase transformation once the stressreaches the equilibrium stress (Muller and Xu, 1991).
While the disregard of threshold values is justified by isothermal, deformation-con-trolled experiments on a CuZnAl single crystal (Muller and Xu, 1991), there is some exper-imental evidence obtained on NiTi specimens suggesting the existence of threshold valuesthat must be reached before phase transformation is initiated (Pascal and Monasevich,1981; Tanaka et al., 1995). Threshold values are studied in detail in (Raniecki and Lexcel-lent, 1994), but will not be taken into account here.
4.5. Transformation kinetics
With the relations presented in the previous section, the state of a single- or two-phasematerial may be characterized. However, a kinetic equation describing the evolution ofmartensite remains to be specified. This is done here based on the Clausius–Duheminequality, which requires the internal entropy production rate _c to be non-negative
Hq _c ¼ qq0
_wetr � qowon
_n�H�1q � rH P 0; ð59Þ
or, more strictly, that both the rate of entropy production due to the dissipative power_cmech
Hq _cmech ¼qq0
s : hetr�
log � qowon
_n P 0 ð60Þ
and the rate of entropy production due to irreversible heat conduction in the presence of athermal gradient _cth
Hq _cth ¼ �H�1q � rH P 0 ð61Þare non-negative, separately (Muller, 2003). Here, the inelastic part of the specific energy isexpressed in terms of stress and strain using the second part of Eq. (15) as only inelasticdeformations due to phase transformation is considered. The current density is denoted byq and the heat flow by q. Although a priori there is no reason to suppose that both Eqs.(60) and (61) must hold singly, the above decomposition is indeed valid as Eq. (60) con-tains no terms depending on $H.
In order to apply the concept of generalized irreversible forces and fluxes (Truesdell andToupin, 1960; Kestin and Rice, 1970), the logarithmic rate of the elastic-phase transforma-tion part of the strain is eliminated from Eq. (60) by means of definitions (55)2 and (46) toyield
1
ns : hetr � q0
owon
� �_n P 0. ð62Þ
Based on this inequality, the thermodynamic force pf driving phase transformation
pf ¼ 1
ns : hetr � q0
owon
ð63Þ
and the corresponding thermodynamic flux _n are defined.On the grounds of these definitions, a kinetic law for phase transformation can be pro-
posed to associate the thermodynamic flux _n with a prescribed thermodynamic force pf.

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1671
Relation (62) has to hold true to ensure thermodynamic consistency, implying the follow-ing requirement for the kinetic equation
_n P 0 for pf > 0;
_n 6 0 for pf < 0.ð64Þ
To describe the evolution of the thermodynamic driving force pf, two functionsf A!M(pf, n) for A!M and f M!A(pf, n) for M! A transformation are defined. Dueto their dependence on pf and n, and the requirement that f a remain constant during pro-cesses of active phase transformation (Raniecki et al., 1992), they link the thermodynamicdriving force to the mass fraction of martensite
f A!M ¼ const. for _n > 0;
f M!A ¼ const. for _n < 0.ð65Þ
It is assumed here that the association between pf and n is of the type
f A!Mðpf ; nÞ ¼ pf � q0kA!MðnÞ 6 0;
f M!Aðpf ; nÞ ¼ �pf þ q0kM!AðnÞ 6 0.ð66Þ
Here, functions k(n) are introduced which will prove to be crucial to the description of pf.In fact, noting (65), the rate of the thermodynamic force _pf may be calculated using
_pf ¼ q0_kA!M for _n > 0;
_pf ¼ q0_kM!A for _n < 0.
ð67Þ
The functions ka are subject to constraints that may be derived from (66) and (67), notingthe implications of definition (63) of pf in terms of the mass fraction of martensite n. Basedon Tanaka (1990), where the description of transformation kinetics proposed by Magee isadopted (Magee, 1970), the constants Ai > 0, Bi and Ci P 0 may be introduced to proposethe equations (Raniecki et al., 1992)
kA!MðnÞ ¼ �ðA1 þ B1nÞ lnð1� nÞ þ C1n P 0 ð68Þfor A!M and
kM!AðnÞ ¼ ðA2 � B2ð1� nÞÞ ln n� C2ð1� nÞ 6 0 ð69Þfor M! A transformation. The shape of the hysteresis as determined by the model is verysensitive to the functions ka, and depending on the characteristics of the respective shapememory alloy under consideration, a different choice for ka may be more appropriate.
For active processes of phase transformation, requirements (64) for the thermodynamicdriving force were specified. However, these necessary criteria are not sufficient to deter-mine whether a process initiating from a given state (he, H, n) will be actively phase trans-forming or a so-called neutral process characterized by n = const. Therefore, a criterionfor neutral processes with constant mass fraction of martensite _n ¼ 0 is derived fromEq. (63)
_pf jn ¼ _pf jn¼const. ¼opf
ohe : he�
log þ opf
oH_H ¼ _pf � opf
on_n. ð70Þ
Noting (67), evaluation of the partial derivative in Eq. (70)2 gives

1672 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
_pf jn ¼ q0
koa
on� 1
ns :
ohetr
onþ 1
n2s : hetr � 2q0wit
� �_n. ð71Þ
Evidently, there will be no active phase transformation for arbitrary rates he�
log and _Hfrom a given state (he,H,n) if the criterion
_pf jn ¼ 0 ð72Þ
is fulfilled. In Raniecki et al. (1992) the term neutral process is introduced for the resultingelastic material response.
Inversion of Eq. (71) yields the required kinetic equation for processes of active A!Mtransformation proceeding for pf > 0 and _pf jn > 0 as long as n 6 1, or M! A transforma-tion subject to pf < 0 and _pf jn < 0 as long as n P 0, where _pf jn is given by Eq. (70)1.
Evaluation of such a tensorial kinetic equation requires knowledge not only of the ratesof the elastic Hencky strain he and the mass fraction of martensite n, but also of the elastic-phase transformation part of the strain hetr and its derivative with respect to n. Hence,additional specifications regarding the mechanical properties of the material under consid-eration are required. In Section 4.6, an isotropic material symmetry is postulated. Then, allquantities may be expressed explicitly in terms of the state variables he, H, and n.
The constants Ai, Bi and Ci introduced in Eqs. (68) and (69) are chosen in agreementwith (Raniecki et al., 1992; Tanaka, 1990), taking into account subsequent modifications(Raniecki and Lexcellent, 1994; Ziolkowski, 1993)
A1 ¼Ds� � �s0
a1
; B1 ¼2r1�s0
a1
; C1 ¼ 2r1witðM0s Þ;
A2 ¼Ds� þ �s0
a2
; B2 ¼2r2�s0
a2
; C2 ¼ 2r2witðA0s Þ.
ð73Þ
A discussion of the identification of the model-specific parameters is given in Muller(2003).
4.6. Isotropy
Experimental results support a simplification of the foregoing relations to isotropy(Orgeas and Favier, 1998; Sittner and Novak, 2000)5. To this end it is postulated thatstress and phase distortion are coaxial (Raniecki et al., 1992)
j ¼ gs0ffiffiffiffiffiffiffiffiffiffiffi
s0 : s0p . ð74Þ
The denominator on the right-hand side is defined as equivalent Kirchhoff stress,s ¼
ffiffiffiffiffiffiffiffiffiffiffis0 : s0p
, where (Æ) 0 denotes the deviator of (Æ). Now assuming isotropy, the deviatoricintrinsic phase distortion j due to phase transformation is presumed to be proportionalto the deviator of the total strain h
1
gj ¼ 1
hh0. ð75Þ
5 In both studies cited, an asymmetry between tension and compression is observed. This phenomenon cannotbe represented by the simplified model. For an extension of the theory, see Raniecki and Lexcellent (1998).

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1673
Here, the quantity h is an equivalent Hencky strain defined from the strain deviator byh ¼
ffiffiffiffiffiffiffiffiffiffiffih0 : h0p
. Considering Eq. (55)2, which defines the elastic-phase transformation part ofthe strain hetr as the phase distortion j weighted by the mass fraction of martensite n, theisotropic relationship
1
gnhetr ¼ 1
gj ¼ 1
hh0 ð76Þ
is obtained. Using the additive decomposition (55)1, with the definition of the equivalentelastic strain he ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffihe0 : he0p
¼ h� gn the elastic-phase transformation part of the strainmay be expressed in terms of the elastic Hencky strain
hetr ¼ gnhe he0. ð77Þ
Then, evaluation of the respective partial derivatives in the equations of Section 4.5yields the following functional dependence
_n ¼ _nðhe; he�
log;H; _H; nÞ. ð78ÞWith regard to numerical solution procedures, e.g., the finite element method, the
dependency on the elastic part of the strain – which was introduced to obtain thermody-namically independent state variables – has to be replaced by a dependency on the totalstrain h and the stretching D. With
_h ¼ 1
hh0 : D ð79Þ
and Eq. (76), the logarithmic rate of the elastic-phase transformation part of the strain is
hetr�
log ¼ Detr ¼ gh
h0 _nþ nðI� 1
31� 1� 1
h2ðh0 � h0ÞÞ : D
� �. ð80Þ
Here, I is the symmetric fourth rank unit tensor. The isotropic elasticity tensor C0 isspecified to be
C0 ¼ j1� 1þ 2l I� 1
31� 1
� �; ð81Þ
where the bulk modulus j is defined in terms of the Lame constants6 k and l
j ¼ kþ 2
3l. ð82Þ
In addition, the tensor of thermal expansion a0 is assumed to be isotropic
a0 ¼ a01. ð83ÞBased on these definitions, after extensive calculations a scalar equation for the rate of
martensite _na is derived from Eqs. (70) and (71)
_na ¼ 2lg _hþ q0ð�Ds� þ ð1� 2nÞ�s0Þ _H
q0oka
on � 2q0wit þ 2lg2. ð84Þ
6 Of course, k and l are constant only when C is considered to be independent of temperature.

1674 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
With this result, rate Eq. (80) for hetr may be evaluated. Combination with the logarith-mic rate of Eq. (55)1 yields the elastic part of the stretching. Then, the elastic Hencky strainis obtained by corotational integration as defined in Eq. (11)
he ¼ ðRlogÞTH
Z t
0
RlogHDe ds. ð85Þ
Hence, adopting the stated relations, the mass fraction of martensite, the elastic part ofthe strain, and consequently through Eq. (57) the stress s may be readily obtained for pre-scribed rate of deformation D and temperature H.
4.7. Thermomechanical coupling
The thermomechanical coupling of a phase transforming process may be described by arelation of the form (Muller, 2003)
cp_H ¼ � 1
qr � qþ 1
q_hlat. ð86Þ
Here, the rate _hlat at which energy is generated per unit volume is introduced. cp is the spe-cific heat at constant pressure. Neglecting heat sources such as radiation, in terms of thespecific Gibbs energy g the generated heat is
1
q_hlat ¼
1
q0
s : Detr � ogon
_nþHo
2goHos
: s� log þH
o2g
oHon_n. ð87Þ
This relation may be evaluated using Eq. (57) and a Legendre transformation from thespecific Helmholtz free energy to the specific Gibbs energy. Defining the logarithmic rateof the Kirchhoff stress from Eq. (57)
s� log ¼ ðDe � _Ha0Þ : C0; ð88Þ
the energy generation per unit mass is obtained in its final form, which may directly beimplemented into a finite element code
1
q_hlat ¼
1
q0
s : Detr þ ðDu� � �u0ð1� 2nÞÞ _n� 1
q0
Ha0 : s� log. ð89Þ
Heat transfer within the phase transforming body is presumed to obey Fourier’s law
q ¼ �krH; ð90Þwhich fulfills the thermal part of the Clausius–Duhem inequality (61) identically for non-negative values of k.
5. Implementation and numerical results
5.1. Introduction
The constitutive equations presented in the previous sections in conjunction with wellposed initial and boundary conditions define a nonlinear initial boundary value problem.Its solution gives the Kirchhoff stress s, the temperature H as well as all kinematical quan-tities such as the elastic and phase transformation parts of the deformation gradient F andthe elastic and elastic-phase transformation parts of the stretching D.

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1675
In a finite element analysis, the problem is decomposed into discrete time steps. Foreach time step, first incremental displacements are calculated based on the discretized bal-ance of momentum equation. From these, the deformation gradient is obtained, which ispassed on to the material law to calculate stresses and tangent moduli as well as straincomponents, temperature rate and internal variables. Finally, given the stresses, the bal-ance laws can be evaluated to yield a new set of incremental displacements. The processis then repeated until a pre-defined tolerance is met or exceeded.
For the model presented, based on the total and incremental deformation gradients, thestresses, strains and internal variable, i.e. the mass fraction of martensite, have to be com-puted. As the finite element code MSC.Marc chosen for the implementation does not per-mit fully thermomechanically-coupled analyses, equilibrium iterations are performed forthe mechanical problem only. The error made by not directly accounting for temperatureeffects is minimized by using short time steps. Nevertheless, greater accuracy and efficiencycan be expected from monolithic algorithms.
The discretization of the material law is performed based on (Simo and Hughes, 1998;Belytschko et al., 2000) and adapted to the particular environment provided byMSC.Marc. The finite element procedure used is the so-called updated Lagrangian formu-lation, where Eulerian measures of stress and strain are used in conjunction with aLagrangian mesh. Derivatives and integrals are taken with respect to the Eulerian (or spa-tial) coordinates.
5.2. Incremental objectivity
The Eulerian material law is to be integrated in a way that satisfies the requirement offrame indifference. Algorithms complying with this requirement are said to be incremen-tally objective (Simo and Hughes, 1998). Objectivity is preserved by following three stepsin the integration process: First, the given objective rate quantity, e.g., the stretching D orthe stress rate s
� log, is tensorially transformed to the reference configuration. Here, in theconvected description, arbitrary integration algorithms may be applied to determine thevalues of the respective quantities at the end of the time step. Third, the result has to betransformed to the Eulerian description again. In effect, for known state at the beginningof the time step tn, the stress at the end of the time step tn+1 is
snþ1 ¼ ðrlognþ1Þ
THsn þ ðRlog
nþ1ÞTH
Z tnþ1
tn
RlogHs� log ds. ð91Þ
Here, rlogn+1 denotes the incremental logarithmic rotation to be calculated by the exponen-
tial map (Simo and Hughes, 1998).The remaining integral on the right-hand side may either be solved by direct integration
of the constitutive equations, or by applying an iterative scheme comprising an implicitEulerian integration algorithm and a subsequent Newton-iteration. Here, integration isperformed using a software package based on Gear’s method (Kahaner et al., 1989).
5.3. Visualization of model properties
For the model presented, six constants governing the thermoelastic and thermalmaterial behaviour and nine model-specific parameters were identified based on anisothermal test in tension complemented by thermal parameters from the literature. They

Table 1Parameter set
Parameter Value
E (MPa) 35000.0m 0.33a0 (1/K) 8.8 · 10�6
q0 (k/m mm2) 6.45 Æ 10�3
cp (J/kg K) 837.36Du� ðJ=kgÞ 16800.0Ds� ðJ=kg KÞ 64.50�u0 ðJ=kgÞ 4264.5�s0 ðJ=kg KÞ 11.5g 0.055a1 0.15a2 0.70r1 0.55r2 0.95
1676 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
are summarized in Table 1 (cf. Muller, 2003). Adopting this parameter set, the character-istic properties of the model can be illustrated graphically by considering tests in simpletension and simple shear. In the diagrams below, thermal boundary conditions are eitheradiabatic or isothermal. Hence, the actual material behaviour subject to realistic boundaryconditions is expected to correspond to some intermediate curve.
Note that the figures presented here are intended to illustrate the characteristics of themodel only. Currently, a more precise calibration of the model is tested by extensivenumerical simulations of real structures. The results will be published separately.
The dependence of phase transformation on temperature is indicated in Fig. 4. Here,adiabatic tests in tension at H = 315 and at H = 335 K are depicted. Evidently, withincreasing temperature the hysteresis shifts to higher stresses. However, its size is unaf-fected by temperature.
In Fig. 5, the stress response during ten loading cycles under simple tension is depictedfor an adiabatic and an isothermal specimen. The influence of the thermomechanicalcoupling almost doubles the martensite finish stress after ten cycles. The corresponding
Fig. 4. Temperature dependence of hysteresis.

Fig. 5. Stress response: 10 cycles in simple tension.
Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1677
temperatures are depicted in Fig. 6. As the adiabatic specimen heats due to energy dissi-pated irreversibly, the stress (or strain) required to induce phase transformation increasesand the upper branch of the hysteresis shifts upwards. At the same time, the M! A trans-formation stress increases in parallel as the reverse transformation to austenite is initiatedat higher stress levels, since stable martensite exists at increasing levels of stress only.Apparently, the adiabatic process is not characterized by a constant plateau stress. Notethat the reversible piezocaloric effect as depicted in Fig. 6 is negligible in comparison tothe heat generated due to dissipation of mechanical work, which is responsible for theincrease in temperature from one cycle to the next in the adiabatic test, and especiallyin comparison to the reversible heat due to phase transformation, causing approximately90% of the temperature effect.
The evolution of martensite is depicted in Fig. 7. As the specimen heats in the adiabatictest, the hystereses shift to higher strains in a manner consistent with the stress response inFig. 5. As before, the hysteresis in the n–hyy-plane remains constant during cycling for iso-thermal boundary conditions.
Fig. 6. Temperature evolution: 10 cycles in simple tension.

Fig. 7. Evolution of martensite: 10 cycles in simple tension.
1678 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
The characterization of the model would not be complete without a description of thebehaviour of processes within the bounding loop. In Fig. 8, the stress response is depictedfor adiabatic and isothermal processes. The loading process is interrupted repeatedly.Upon reaching the line of unstable equilibria (pf = 0), processes of elastic unloading turnactive until reversal of the loading direction. Subsequently, when the line of equilibria isreached, active A!M processes are initiated. Note that the transformation stress is lowernow than before. This is not in agreement with some experimental observations, where thestress remains at this lower level only initially (Lin et al., 1994). In these experiments, oncethe point of maximum strain in the history of the specimens is reached, the stress quicklyclimbs to a level close to that of the original A!M process, where it remains during fur-ther loading. However, the mechanisms responsible for this effect are not yet fullyunderstood.
Finally, a stress–strain-diagram pertaining to simple shear is plotted as well, see Fig. 9.Based on the definition of equivalent strain adopted here, the shear stress required toinduce martensite is significantly lower than the corresponding tensile stress. Note theinner circles during unloading in contrast to those during loading as depicted in Fig. 8.
Fig. 8. Stress response: inner cycles during loading in simple tension.
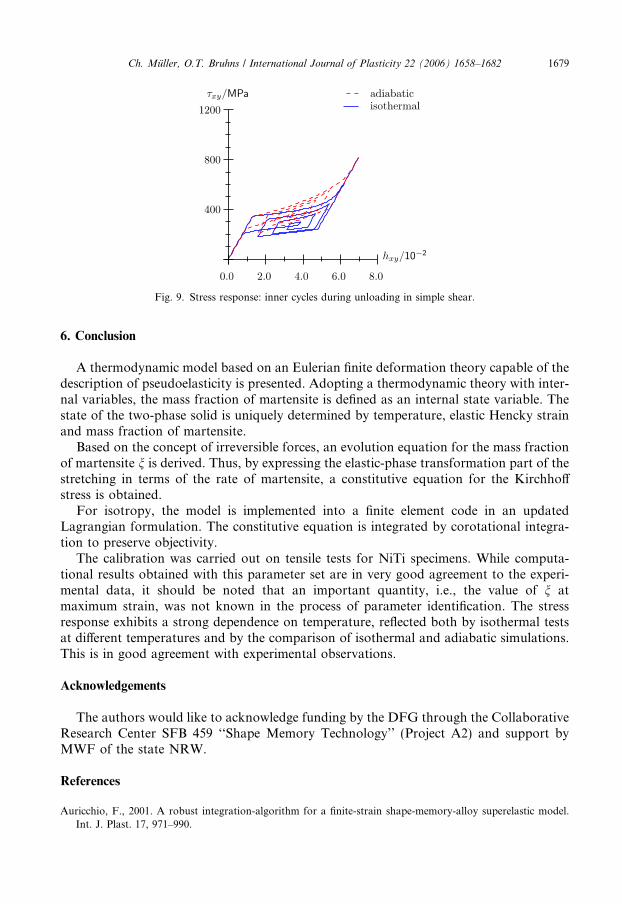
Fig. 9. Stress response: inner cycles during unloading in simple shear.
Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1679
6. Conclusion
A thermodynamic model based on an Eulerian finite deformation theory capable of thedescription of pseudoelasticity is presented. Adopting a thermodynamic theory with inter-nal variables, the mass fraction of martensite is defined as an internal state variable. Thestate of the two-phase solid is uniquely determined by temperature, elastic Hencky strainand mass fraction of martensite.
Based on the concept of irreversible forces, an evolution equation for the mass fractionof martensite n is derived. Thus, by expressing the elastic-phase transformation part of thestretching in terms of the rate of martensite, a constitutive equation for the Kirchhoffstress is obtained.
For isotropy, the model is implemented into a finite element code in an updatedLagrangian formulation. The constitutive equation is integrated by corotational integra-tion to preserve objectivity.
The calibration was carried out on tensile tests for NiTi specimens. While computa-tional results obtained with this parameter set are in very good agreement to the experi-mental data, it should be noted that an important quantity, i.e., the value of n atmaximum strain, was not known in the process of parameter identification. The stressresponse exhibits a strong dependence on temperature, reflected both by isothermal testsat different temperatures and by the comparison of isothermal and adiabatic simulations.This is in good agreement with experimental observations.
Acknowledgements
The authors would like to acknowledge funding by the DFG through the CollaborativeResearch Center SFB 459 ‘‘Shape Memory Technology’’ (Project A2) and support byMWF of the state NRW.
References
Auricchio, F., 2001. A robust integration-algorithm for a finite-strain shape-memory-alloy superelastic model.Int. J. Plast. 17, 971–990.

1680 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
Auricchio, F., Taylor, R.L., 1997. Shape-memory alloys: modelling and numerical simulations of the finite-strainsuperelastic behavior. Comput. Meth. Appl. Mech. Eng. 143, 175–194.
Auricchio, F., Taylor, R.L., 1999. A return-map algorithm for general associative isotropic elasto-plasticmaterials in large deformation regimes. Int. J. Plast. 15, 1359–1378.
Belytschko, T., Liu, W.K., Moran, B., 2000. Nonlinear Finite Elements for Continua and Structures. Wiley, NewYork.
Bo, Z., Lagoudas, D.C., 1999a. Thermomechanical modeling of polycrystalline SMAs under cyclic loading, partI: theoretical derivations. Int. J. Eng. Sci. 37, 1089–1140.
Bo, Z., Lagoudas, D.C., 1999b. Thermomechanical modeling of polycrystalline SMAs under cyclic loading, partII: material characterization and experimental results for a stable transformation cycle. Int. J. Eng. Sci. 37,1141–1173.
Bo, Z., Lagoudas, D.C., 1999c. Thermomechanical modeling of polycrystalline SMAs under cyclic loading, partIII: evolution of plastic strains and twoway shape memory effect. Int. J. Eng. Sci. 37, 1175–1203.
Bo, Z., Lagoudas, D.C., 1999d. Thermomechanical modeling of polycrystalline SMAs under cyclic loading, partIV: modeling of minor hysteresis loops. Int. J. Eng. Sci. 37, 1205–1249.
Bouvet, C., Calloch, S., Lexcellent, C., 2004. A phenomenological model for pseudoelasticity of shape memoryalloys under multiaxial proportional and nonproportional loadings. Eur. J. Mech. A Solids 23, 37–61.
Bruhns, O.T., Xiao, H., Meyers, A., 1999. Self-consistent Eulerian rate type elasto-plasticity models based uponthe logarithmic stress rate. Int. J. Plast. 15, 479–520.
Bruhns, O.T., Xiao, H., Meyers, A., 2001. A self-consistent Eulerian rate type model for finite deformationelastoplasticity with isotropic damage. Int. J. Solids Struct. 38, 657–683.
Drucker, D.C., 1988. Conventional and unconventional plastic response and representation. Appl. Mech. Rev. 41(4), 151–167.
Gadaj, S.P., Nowacki, W.K., Tobushi, H., 1999. Temperature evolution during tensile test of TiNi shape memoryalloy. Arch. Mech. 51 (6), 649–663.
Gall, K., Lim, T.J., McDowell, D.L., Sehitoglu, H., Chumlyakov, Y.I., 2000. The role of intergranularconstraint on the stress-induced martensitic transformation in textured polycrystalline NiTi. Int. J. Plast. 16,1189–1214.
Haupt, P., 2002. Continuum Mechanics and Theory of Materials, second ed. Springer-Verlag, Berlin.Helm, D., 2005. Pseudoelastic behaviour of shape memory alloys: constitutive theory and identification of the
material parameters using neural networks. Techn. Mech. 25, 39–58.Helm, D., Haupt, P., 2001. Geometrisch nichtlineare Modellierung und numerische Simulation von
Formgedachtnislegierungen. Z. Angew. Math. Mech. 81 (S2), 339–340.Helm, D., Haupt, P., 2003. Shape memory behaviour: modelling within continuum thermomechanics. Int. J.
Solids Struct. 40, 827–849.Hencky, H., 1928. Uber die Form des Elastizitatsgesetzes bei ideal elastischen stoffen. Z. Techn. Phys. 9, 214–220.Huang, M., Brinson, L.C., 1998. A multivariant model for single crystal shape memory alloy behavior. J. Mech.
Phys. Solids 46, 1379–1409.Iadicola, M.A., Shaw, J.A., 2004. Rate and thermal sensitivities of unstable transformation behavior in a shape
memory alloy. Int. J. Plast. 20, 577–605.Kahaner, D., Moler, C., Nash, S., Malcolm, M.A., 1989. Numerical Methods and Software. Prentice-Hall, New
Jersey.Kestin, J., Rice, J.R., 1970. A critical review of thermodynamics. Mono Book Corp., Baltimore, Ch. Paradoxes in
the application of thermodynamics to strained solids, pp. 275–298.Khan, A.S., Huang, S., 1995. Continuum Theory of Plasticity. Wiley, New York.Lehmann, T., 1989. Some thermodynamical considerations on inelastic deformations including damage
processes. Acta Mech. 79, 1–24.Lin, P.H., Tobushi, H., Tanaka, K., Hattori, T., Makita, M., 1994. Pseudoelastic behaviour of TiNi shape
memory alloy subjected to strain variations. J. Intell. Mater. Syst. Struct. 5, 694–701.Liu, Y., Gall, K., Dunn, M.L., Greenberg, A.R., Diani, J., 2006. Thermomechanics of shape memory polymers:
Uniaxial experiments and constitutive modeling. Int. J. Plast. 22, 279–313.Lovey, F.C., Condoa, A.M., Torrab, V., 2004. A model for the interaction of martensitic transformation with
dislocations in shape memory alloys. Int. J. Plast. 20, 309–321.Magee, C.L., 1970. The nucleation of martensite. In: Papers Presented at a Seminar of the American Society for
Metals. American Society for Metals, Metals Park, OH, pp. 115–156.Muller, I., 1989. On the size of the hysteresis in pseudelasticity. Continuum Mech. Thermodyn. 1, 125–142.

Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682 1681
Muller, C., 2003. Thermodynamic modeling of polycrystalline shape memory alloys at finite strains. Ph.D. thesis,Ruhr-Universitat Bochum.
Muller, I., Seelecke, S., 2001. Thermodynamic aspects of shape memory alloys. Math. Comput. Modell. 34, 1307–1355.
Muller, I., Xu, H., 1991. On the pseudoelastic hysteresis. Acta Metall. Mater. 39 (3), 263–271.Nemat-Nasser, S., 1983. On finite plastic flow of crystalline solids and geomaterials. J. Appl. Mech. 50, 1114–
1126.Nemat-Nasser, S., 1992. Phenomenological theories of elastoplasticity and strain localization at high strain rates.
Appl. Mech. Rev. 45 (3), 19–45.Niclaeys, C., Zineb, T.B., Arbab-Chirani, S., Patoor, E., 2002. Determination of the interaction energy in the
martensitic state. Int. J. Plast. 18, 1619–1647.Oberste-Brandenburg, C., 1999. Ein Materialmodell zur Beschreibung der Austenit-Martensit Phasentransfor-
mation unter Berucksichtigung der transformationsinduzierten Plastizitat. Ph.D. thesis, Ruhr-UniversitatBochum.
Ogden, R.W., 1984. Non-linear Elastic Deformations. Dover Publications, Inc., Mineola, NY.Orgeas, L., Favier, D., 1998. Stress-induced martensitic transformation of a NiTi alloy in isothermal shear,
tension and compression. Acta Mater. 46 (15), 5579–5591.Panoskaltsis, V.P., Bahuguna, S., Soldatos, D., 2004. On the thermomechanical modeling of shape memory
alloys. Int. J. Non-Linear Mech. 39, 709–722.Pascal, Y., Monasevich, L., 1981. Hysteresis features of the martensitic transformation of Titanium Nickelide.
Phys. Met. Metall. 52 (5), 95–99.Patoor, E., Eberhardt, A., Berveiller, M., 1996. Micromechanical modelling of superelasticity in shape memory
alloys. J Physique IV, supplement au J Physique III 6, C1–277–C1–292.Peng, X., Yang, Y., Huang, S., 2001. A comprehensive description for shape memory alloys with a two-phase
constitutive model. Int. J. Solids Struct. 38, 6925–6940.Petho, A., 2000. Constitutive modelling of shape memory alloys based on a finite strain description. Periodica
Polytechnica Ser. Mech. Eng. 44 (1), 115–126.Petho, A., 2001. Constitutive modelling of shape memory alloys at finite strain. Z. Angew. Math. Mech. 81 (S2),
355–356.Peyroux, R., Chrysochoos, A., Licht, C., Lobel, M., 1998. Thermomechanical couplings and pseudoelasticity of
shape memory alloys. Int. J. Eng. Sci. 36 (4), 489–509.Qidwai, M.A., Entchev, P.B., Lagoudas, D.C., DeGiorgi, V.G., 2001. Modeling of the thermomechanical
behavior of porous shape memory alloys. Int. J. Solids Struct. 38, 8653–8671.Raniecki, B., Bruhns, O.T., 1991. Thermodynamic reference model for elastic-plastic solids undergoing phase
transformations. Arch. Mech. 43 (2–3), 343–376.Raniecki, B., Lexcellent, C., 1994. RL-models of pseudoelasticity and their specification for some shape memory
solids. Eur. J. Mech. A/Solids 13 (1), 21–50.Raniecki, B., Lexcellent, C., 1998. Thermodynamics of isotropic pseudoelasticity in shape memory alloys. Eur. J.
Mech. A/Solids 17 (2), 185–205.Raniecki, B., Lexcellent, C., Tanaka, K., 1992. Thermodynamic models of pseudoelastic behaviour of shape
memory alloys. Arch. Mech. 44 (3), 261–284.Raniecki, B., Rejzner, J., Lexcellent, C., 2001. Anatomization of hysteresis loops in pure bending of ideal
pseudoelastic SMA beams. Int. J. Mech. Sci. 43, 1339–1368.Reinhardt, W.D., Dubey, R.N., 1995. Eulerian strain-rate as a rate of logarithmic strain. Mech. Res. Comm. 22
(2), 165–170.Reinhardt, W., Dubey, R., 1996. Coordinate-independent representation of spins in continuum mechanics. J.
Elast. 42, 133–144.Rejzner, J., Lexcellent, C., Raniecki, B., 2002. Pseudoelastic behaviour of shape memory alloy beams under pure
bending: experiments and modelling. Int. J. Mech. Sci. 44, 665–686.Rice, J.R., 1971. Inelastic constitutive relations for solids: An internal-variable theory and its application to metal
plasticity. J. Mech. Phys. Solids 19, 433–455.Shaw, J.A., 2000. Simulations of localized thermo-mechanical behavior in a TiNi shape memory alloy. Int. J.
Plasticity 16, 541–562.Shimizu, K., Tadaki, T., 1987. Shape memory effect: mechanism. In: Funakubo, H. (Ed.), Shape Memory Alloys.
Gordon and Breach Science Publishers, pp. 1–60.Simo, J.C., Hughes, T.J.R., 1998. Computational Inelasticity. Springer, New York.

1682 Ch. Muller, O.T. Bruhns / International Journal of Plasticity 22 (2006) 1658–1682
Sittner, P., Novak, V., 2000. Anisotropy of martensitic transformations in modeling of shape memory alloypolycrystals. Int. J. Plast. 16, 1243–1268.
Souza, A.C., Mamiya, E.N., Zouain, N., 1998. Three-dimensional model for solids undergoing stress-inducedphase transformations. Eur. J. Mech. A Solids 17, 789–806.
Tanaka, K., 1990. A phenomenological description on thermomechanical behavior of shape memory alloys. J.Pres. Ves. Technol. 112, 158–163.
Tanaka, K., Nishimura, F., Tobushi, H., 1995. Transformation start lines in TiNi and Fe-based shape memoryalloys after incomplete transformations induced by mechanical and/or thermal loads. Mech. Mater. 19, 271–280.
Thamburaja, P., Anand, L., 2001. Polycrystalline shape-memory materials: effect of crystallographic texture. J.Mech. Phys. Solids 49, 709–737.
Truesdell, C., Noll, W., 1992. The Non-linear Field Theories of Mechanics, second ed. Springer Verlag, NewYork.
Truesdell, C., Toupin, R.A., 1960. The classical field theories. In: Flugge, S. (Ed.), Handbuch der Physik, vol. III/1. Springer-Verlag, Berlin.
Xiao, H., Bruhns, O.T., Meyers, A., 1997a. Hypo-elasticity model based upon the logarithmic stress rate. J. Elast.47, 51–68.
Xiao, H., Bruhns, O.T., Meyers, A., 1997b. Logarithmic strain, logarithmic spin and logarithmic rate. ActaMech. 124, 89–105.
Xiao, H., Bruhns, O.T., Meyers, A., 1998a. On objective corotational rates and their defining spin tensors. Int. J.Solids Struct. 35 (30), 4001–4014.
Xiao, H., Bruhns, O.T., Meyers, A., 1998b. Strain rates and material spins. J. Elast. 52, 1–41.Xiao, H., Bruhns, O.T., Meyers, A., 1999. Existence and uniqueness of the integrable-exactly hypoelastic
equation s�* = k(trD)I + 2lD and its significance to finite inelasticity. Acta Mech. 138, 31–50.Xiao, H., Bruhns, O.T., Meyers, A., 2000. A consistent finite elastoplasticity theory combining additive and
multiplicative decomposition of the stretching and the deformation gradient. Int. J. Plast. 16, 143–177.Xiao, H., Bruhns, O.T., Meyers, A., 2006. Elastoplasticity beyond small deformations. Acta Mech.Ziolkowski, A., 1993. Theoretical analysis of efficiency of shape memory alloy heat engines (based on constitutive
models of pseudoelasticity). Mech. Mater. 16, 365–377.