2018-2019 dinamica del punto materiale -...
TRANSCRIPT

7
Meccanica2018-2019
Dinamica del punto materiale

Legge fondamentale della dinamica
2
2
d rF ma m
dt= =
�
�
�
Nota la forza possiamo determinare l’equazione del moto
Dal movimento (accelerazione) risaliamo alla forza che lo produce
Quantità di moto:
p mv=� � dpF
dt=�
�
ABBA FF ,,
��
−=Principio di azione e reazione:
0
J ( )t
tF t dt=
� �
Impulso della forza:
J p= ∆�
�
“Teorema dell’impulso”

Dinamica del punto materiale
Quantità di moto, impulso
Se la forza è costante:
0
t
tF dt p= ∆�
� pF
t
∆=∆
�
�
In generale:
0
( )t
tF t dt p= ∆�
�
mF t p∆ = ∆�
�
m
pF
t
∆=∆
�
�
In assenza di forze che agiscono sul punto materiale, la sua quantità di moto si conserva
Conservazione della quantità di moto0
J ( )t
tF t dt p= = ∆
� �
�
0
1( )
t
mt
F t dt Ft
=∆
� �
Valor medio della forza
t∆
Quando non c’è variazione di quantità
della moto
0F =�

1 2F F+� �
Dinamica del punto materiale
Risultante delle forzeForza = grandezza vettoriale
Se su un corpo agiscono più forze il moto avviene come se agisse solo la loro somma vettoriale(“Risultante delle forze”)
=
=N
i
iF1
�
=
=N
i
ia1
�
Per l’accelerazione:
1TOT TOTa F
m=
�
�
=
=N
i
iFm 1
1 � In presenza di più forze sul punto materiale, ciascuna agisce in modo indipendente dalle altre
NB: Dall’osservazione del moto del punto materiale abbiamo informazione solo sulla risultante delle forze
In particolare 0TOT
a =�
NON SIGNIFICA che sul punto non agiscono forze
SIGNIFICA che la loro risultante è nulla
NTOT FFFFF�����
....321
+++=TOT
F�
3F�
1F�
2F�
Condizione per l’equilibrio statico0TOT
F =�
( 0)TOTa =�
2F�
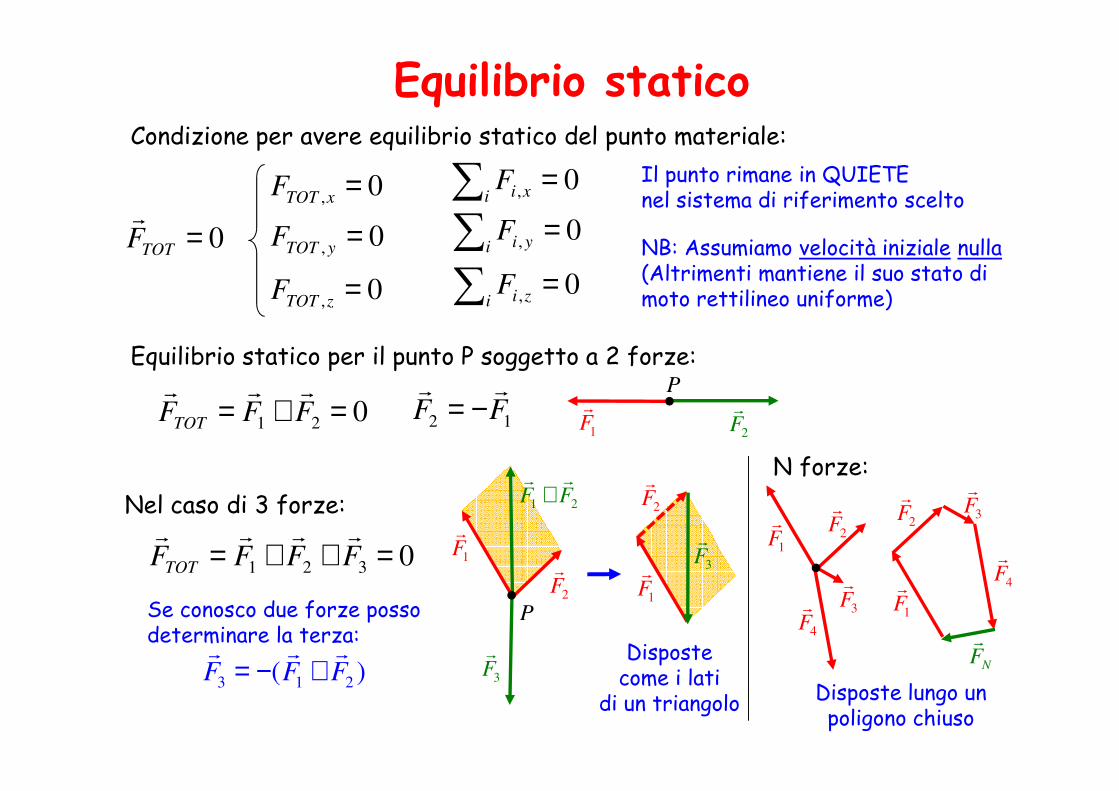
Equilibrio staticoCondizione per avere equilibrio statico del punto materiale:
0=TOTF�
Il punto rimane in QUIETEnel sistema di riferimento scelto
0, =i xiF
0, =i yiF
0, =i ziF
0, =xTOTF
0, =yTOTF
0, =zTOTF
NB: Assumiamo velocità iniziale nulla(Altrimenti mantiene il suo stato di moto rettilineo uniforme)
021 =+= FFFTOT
���
Equilibrio statico per il punto P soggetto a 2 forze:
0321 =++= FFFFTOT
����
Nel caso di 3 forze:
1F�
P
1 2F F+� �
3F� Disposte
come i lati di un triangolo
3F�
1F�
2F�
2 1F F= −� �
1F�
2F�
P
3 1 2( )F F F= − +
� � �
Se conosco due forze posso determinare la terza:
Disposte lungo un poligono chiuso
NF�
1F�
2F�
3F�
4F�
N forze:
1F�
2F�
3F�
4F�
x
y
Dinamica del punto materiale
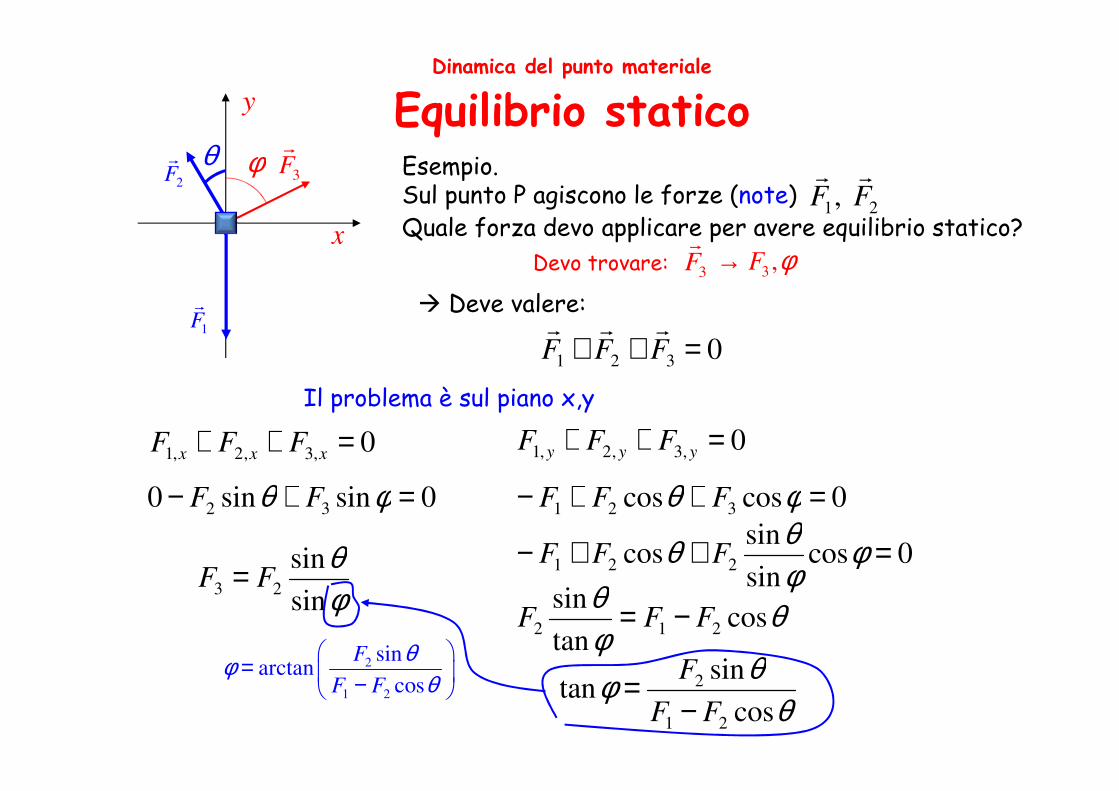
Equilibrio staticoEsempio.Sul punto P agiscono le forze (note)
1 2, F F� �
Quale forza devo applicare per avere equilibrio statico?
0321 =++ FFF���
Deve valere:
0,3,2,1 =++ xxx FFF 0,3,2,1 =++ yyy FFF
0sinsin032
=+− φθ FF 0coscos321
=++− φθ FFF
φθ
sin
sin23 FF =
0cossin
sincos 221 =++− φ
φθθ FFF
θφθ
costan
sin212 FFF −=
θθφ
cos
sintan
21
2
FF
F
−=
Il problema è sul piano x,y
Devo trovare:3
F�
φ3
F�
3,F φ→
2
1 2
sinarctan
cos
F
F F
θφθ
= −
1F�
2F� θ

Dinamica del punto materiale
Reazione vincolareSe sappiamo che su un corpo agisce una forza, ma questo rimane fermo…
Il “vincolo” si deforma e produce una forza sul corpo, tale da realizzare le condizioni di equilibrio statico:
10
TOTF F N= + =� � �
1N F= −� �
Risultante delle forze applicate
Reazione vincolare
1F�
Esiste una forza uguale econtraria che annulla la risultante
N�
m
La reazione vincolare non ha una forma predefinita: dipende dal caso particolare che si sta considerando
N�
m
1F�

Dinamica del punto materiale
Azione delle forze
Moto rettilineo uniforme: 0a = →�
0=F�
Moto uniformemente accelerato: cost.a =� (in modulo e direzione)cost.F→ =�
Moto piano curvilineo:T N
a a a= + →� � �
NT amamF��
�
+=
NT uR
vmu
dt
dvm
��
2
+=
TT udt
dvmF
�
�
=
NN uR
vmF
�
�
2
=
Forza tangenziale
Variazione del modulo della velocità
Forza centripeta
Variazione della direzione
amF�
�
=Legge di Newton:
P
NF�
TF�
Ta�
Na�
Risultante delle forze che agiscono su P

2
N N
vF m u
R=
�
�
Forza centripeta
NF�
v�

Dinamica del punto materiale
Forza pesoAccelerazione di gravità
TOT PF N F ma= + =� � �
�Risultante delle forzesul punto P
ma mg= −� �
)( gam�� −=
a�
a� Ascensore (e.g. verso l’alto)
NB - La sensazione di peso è data dalla forza vincolare
)( zz uguam�� +=
zugam�
)( += mgN > La “sensazione di peso” aumenta
Non c’è sensazione di pesoga�� = (caduta libera)
“forza peso“proporzionale alla massa
Forza associata: PF mg=�
�
29.8 msg
−≅
Reazione vincolare?
PN ma F= −� �
�
Supponiamo che il piano d’appoggio subisca una accelerazione
Bilancia PF
mg
=Oggetto appoggiato sul tavolo:La forza peso è bilanciata dalla reazione vincolare
0TOT PF N F= + =� � �
PF mg=�
�
N�
m
z
zu�
za g gu= = −� � �

Osserviamo che il corpo NON si muove, finché il modulo della forza non supera un valore critico
NF Sµ≤Condizione di quiete
NF Sµ>Condizione di moto
Lungo x:AS x xf u Fu− =� �
Lungo y: 0y yNu mgu− =� �
Forza di attrito statico
Coefficiente di attrito statico
Proporzionale alla reazione vincolare N
Il vincolo esercita una forza che dipende dalla forza applicata
0 AS Sf Nµ≤ <ASf�
F�
NFF Sµ>=�
Per avere accelerazione:
Applichiamo la forza orizzontale F�
F�
Equilibrio statico: abbiamo una forza in grado di bilanciare F�
ASf�
ASf�
Punto materiale di massa m forza peso , reazione vincolare P
F mg=�
�
N�
PF mg=�
�
N�
m
y
xO xu�
yu�
Dinamica del punto materiale
Attrito radente

Dinamica del punto materiale
Attrito radente• Forze di coesione (di natura elettrica) a livello molecolare • Rugosità delle superfici a contatto
Fotomicrografia al SEM di una superficie nichelata. Rugosità ~ 0.1 µm
Fotomicrografia al SEM di una superficie di acciaio inox. Rugosità ~ 3 µm
SEM = microscopio elettronico a scansione

y
xO
NDµ
NSµ
Attrito radente
Dinamica del punto materiale
Attrito radente
Equazione del moto (lungo x):
ADF f ma− =
Una volta in movimento, la forza fAD nondipende dalla velocità del corpo
Aumentiamo la forza orizzontale F�
Coefficiente di attrito dinamico
SD µµ <Si osserva che per ogni materiale:
I valori dipendono dal materiale, dalla forma e rugosità delle superfici, temperatura, etc.
F�
Si osserva che al moto si oppone una forza di attrito radente dinamico, di modulo:
AD Df Nµ=ADf�
NF Sµ>Quando
il corpo si mette in movimentoa�
PF mg=�
�
N�
m
DF N maµ− =

Dinamica del punto materiale
Coefficienti di attrito radente (per unità di superficie)
Superfici μS (statico) μD (dinamico)
Legno - legno 0,50 0,30Acciaio - acciaio 0,78 0,42Acciaio - acciaio lubrificato 0,11 0,05Acciaio - alluminio 0,61 0,47Acciaio - ottone 0,51 0,44Acciaio - teflon 0,04 0,04Acciaio - ghiaccio 0,027 0,014Acciaio - aria 0,001 0,001Rame - acciaio 1,05 0,29Rame - vetro 0,68 0,53Gomma - asfalto (asciutto) 1,0 0,8Gomma - asfalto (bagnato) 0,7 0,6Vetro - vetro 0,9 - 1,0 0,4Legno sciolinato - neve 0,10 0,05
Superfici molto lisce: “coesione”
L’attrito non si elimina mai completamente Aria, olio, …: lubrificanti
Se si trascura l’attrito radente: “superficie liscia”. Altrimenti “superficie scabra”

x
y
θ
Piano inclinato
0 cos =+− yy uNumg��θ
xx umaumg��
sin =θReazione vincolare: θcosmgN =
Accelerazione: θsinga =
Moto uniformemente accelerato (x0 = v0 = 0)
2 21 1( ) ( sin )
2 2x t at g tθ= =
m
θmg�
N�
mg N ma+ =�
� �
Applichiamo la legge di Newton:
iF ma=�
�
Scomponiamo l’equazione nelle direzioni degli assi:
Galileo sfruttò il piano inclinato per studiare la dinamica dei corpi con accelerazioni inferiori a g
Accelerazione a < g
Quali forze agiscono su m?
Assumiamo superficie liscia
Equazione del moto
= Costante

Piano inclinatoAssumiamo superficie scabra
Reazione vincolare normale al piano: cosN mg θ=
Il corpo rimane fermo finché la componente lungo x della forza peso è bilanciata dalla forza di attrito statico
Il corpo si muove solo per angoli θ maggiori di questo
Sµθ <tan
Una volta che il corpo è in moto:Coefficiente di attrito statico Coefficiente di attrito dinamico
maNmg D =− µθsin
mamgmg D =− θµθ cossin
)cos(sin θµθ Dga −= Dµθ >tan
mgθθ
N
x
y
sin cosSmg mgθ µ θ<
Per quale valore di θ il corpo si mette in moto?
0>Finché a > 0 il corpo continua ad accelerare
sin Smg Nθ µ<, cioè finché:
Af
(attrito radente lungo superficie del piano inclinato, ), S Dµ µ
arctan S Sθ µ θ< ≡
arctan D Dθ µ θ> ≡

Piano inclinato
0 Sθ θ< ≤ Corpo fermo
Sθ θ> Il corpo si muove
Una volta in moto, sul corpo agisce l’attrito dinamico con SD µµ <
La misura degli angoli critici i coefficienti di attrito statico e dinamico dei materiali in diverse condizioni fisiche
, S Dθ θ, S Dµ µ
consente di misurare
mgθθ
N
x
yAf
Fissati i valori e definiti , S Dµ µ
Dθ θ= 0a→ = velocità costante
Dθ θ< 0a→ < rallenta fino a fermarsi
(accelera anche perSθθ < purché valga )
Dθ θ>
arctanS Sθ µ≡
Dθ θ>Per angoli il corpo accelera0a→ >
arctanD Dθ µ≡vediamo l’andamento a seconda dell’inclinazione θ