160124864 bab-i-konsep-dasar-pengendalian-proses
TRANSCRIPT

BAB I
KONSEP DASAR PENGENDALIAN PROSES
1.1. Pendahuluan
Pabrik kimia adalah susunan/rangkaian dari berbagai unit pengolahan yang
terintegrasi satu sama lain secara sistematik dan rasional. Tujuan dari pengoperasian
pabrik kimia secara keseluruhan adalah untuk mengubah (mengkonversi) bahan baku
tertentu (input feedstock) mrenjadi produk yang diinginkan.
Dalam pengoperasiannya, pabrik kimia akan selalu mengalami banyak
ganggauan (disturbance) pada variabel prosesnya dari luar (eksternal), sehingga
diperlukan pengendalian variabel proses tersebut agar tetap pada batasan yang
dipersyaratkan (diizinkan) dalam operasinya.
Pengendalian proses pada dasarnya adalah usaha untuk mencapai tujuan agar
proses berjalan sesuai dengan yang diinginkan. Namun, apakah memang betul-betul
diperlukan pengendalian proses ? Jawab terhadap pertanyaan ini bida “tidak” bisa
“ya”. Proses tidak perlu dikendalikan jika memang tujuan proses tercapai tanpa unsur
pengendalian. Contoh sederhana misalnya mempertahankan suhu air pada tekanan
normal tetap pada 100 oC. Tanpa dikendalikan pun, air yang mendidih suhunya tetap
100 oC pada tekanan 1 atm. Sebaliknya, proses perlu dikendalikan jika untuk
mencapai tujuan perlu pengawasan terus-menerus. Contoh sederhana adalah
mempertahankan suhu air pada 40 oC dalan udara yang bersuhu kamar dan tekanan
normal.
1.2. Alasan Pentingnya Pengendalian Proses dalam Industri Kimia
Pabrik kimia, atau pabrik lain yang sejenis, harus beroperasi pada kondisi
operasi tertentu. Beberapa alasan yang menyebabkan pengendalian proses sangat
diperlukan dalam pengoperasian pabrik kimia antara lain:
1. Keamanan Operasi (Safety)
Bab I. Konsep Dasar Pengendalian Proses 1
Keamanan dalam operasional suatu pabrik kimia merupakan kebutuhan primer
untuk orang-orang yang bekerja di pabrik tersebut dan bagi kelangsungan
perusahaan. Untuk menjaga terjaminnnya keamanan tersebut, berbagai kondisi
operasi pabrik seperti tekanan operasi, temperatur operqasi, konsentrasi bahan
kimia, ketinggian level cairan dalam tangki penyimpan dan lain-lain harus
dijaga tetap dalam batas-batas tertentu yang diizinkan.
2. Spesifikasi Produksi (Production Specifications)
Suatu pabrik kimia harus menghasilkan produk dalam jumlah dan dengan
kualitas tertentu yang dipersyaratkan, dengan demikian dibutuhkan suatu sistem
pengendali untuk menjaga tingkat produksi dan kualitas produk yang
diinginkan.
3. Kendala-kendala Operasional (Operational Constrains)
Peralatan-peralatan yang digunakan dalam operasi pabrik kimia memiliki
kendala-kendala operasional tertentu yang harus dipenuhi. Sebagai contoh, pada
suatu pompa harus dipertahankan operasinya pada nilai Net Pisitive Suction
Head (NPSH) tertentu selama operasi; kolom destilasi harus dijaga agar tidak
sampai terjadi limpahan (flooded), isi dari tangki tidak boleh luber atau kering,
dan sebagainya.
4. Peraturan Lingkungan (Enviromental Regulations)
Terdapat berbagai peraturan lingkungan yang memberikan syarat-syarat tertentu
bagi berbagai buangan pabrik kimia
5. Faktor Ekonomi (Economics)
Operasi pabrik kimia ditujukan untuk memberikan keuntungan yang
maksimum, sehingga pabrik harus dijalankan pada kondisi yang memungkinkan
biaya bahan baku menjadi minimum dan laba yang diperoleh menjadi
maksimum tanpa mengabaikan faktor-faktor diatas.
Agar dapat memenuhi semua faktor dan persyaratan di atas, diperlukan
pengawasan (minitoring) yang terus menerus terhadap operasi pabrik kimia dan
intervensi dari luar (external intervention control) untuk menjamin tercapainya tujuan
Bab I. Konsep Dasar Pengendalian Proses 2

operasi. Hal ini dapat terlaksana melalui suatu rangkaian peralatan (alat
ukur/intrumen, pengendali, katup kontrol dan komputer) dan intervensi manusia
(plant managerr, plant operator) yang secara bersama-sama membentuk “control
system”.
1.3. Kebutuhan akan Sistem Pengendali Proses
Sistem pengendali diterapkan untuk memenuhi 3 (tiga) kelompok kebutuhan,
yaitu:
1. Menekan Pengaruh Gangguan Luar (Eksternal)
2. Memastikan Kestabilan Suatu Proses Kimiawi
3. Optimasi Kinerja Proses Kimiawi
Beberapa contoh kasus untuk dapat menggambarkan dengan lebih baik penggunaan
sistem pengendali untuk memenuhi ketiga kebutuhan tersebut adalah:
1. Menekan Pengaruh Gangguan Eksternal
Contoh aktual dari pengendalian melalui mengurangi pengaruh gangguan
ekternal dapat dilihat pada contoh berikut :
Contoh 1.1. Pengendalian Operasi Tangki Pemanas Berpengaduk
Tujuan/sasaran pemanas adalah :
Menjaga temperatur keluar tangki (T) pada temperatur yang ditetapkan
(Ts)
Menjaga volume cairan dalam tangki pada volume yang diinginkan
(Vs)
Bila : Fi ; Ti tetap → Ti = Ts
V = Vs → h = hs
Bila : Fi atau T berubah → perlu pengendali
Bab I. Konsep Dasar Pengendalian Proses 3

Gambar 1.1 Sistem ProsesTangki Pemanas Berpengaduk
Berbagai sistem pengendali yang dibutuhkan pada beberapa kasus perubahan nilai Fi
dan/atau Ti adalah:
a. Pengendali Temperatur (untuk kasus Ti berubah, Fi konstan);
Gambar 1.2 Gambar 1.3
Pengendali Temperatur “Feed Back” Pengendali Temperatur “Feed Foward”
b. Pengendali Ketinggian Cairan
Pengendali ketinggian “feed back” untuk tangki pemanas seperti gambar
berikut:
Bab I. Konsep Dasar Pengendalian Proses 4

Gambar 1.4 Skema pengendali ketinggian cairan dengan Pengaturan laju alir masuk (Fi)
Gambar 1.5 Skema pengendali ketinggian cairan dengan Pengaturan laju alir keluar (F)
2. Memastikan Kestabilan Suatu Proses Kimiawi
Pada Gambar 1.6 variabel proses x (dapat berupa Temperatur, Tekanan,
Konsentrasi, Flow, dan lain-lain) mula-mula berharga konstan. Pada t = to nilai x
tersebut terganggu oleh karena faktor luar, tetapi dengan perjalanan waktu nilai x
kembali pada nilai semula. Sistem dengan kelakuan demikian disebut sebagai sistem
yang stabil (stable) atau self regulating. Pada sistem demikian tidak diperlukan
interversi pengendalian dari luar untuk stabilisasi atau memaksa x kembali ke nilai
awalnya.
Bab I. Konsep Dasar Pengendalian Proses 5

Gambar 1.6 Respons dari suatu sistem yang Stabil
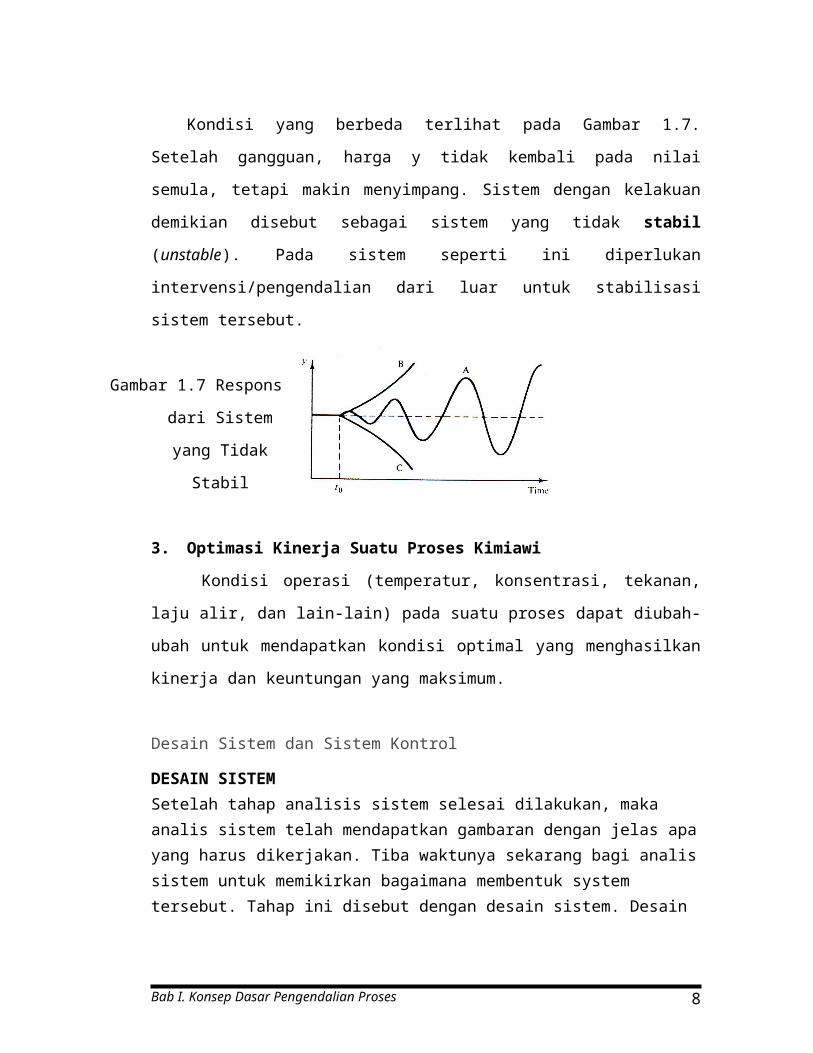
Kondisi yang berbeda terlihat pada Gambar 1.7. Setelah gangguan, harga y
tidak kembali pada nilai semula, tetapi makin menyimpang. Sistem dengan kelakuan
demikian disebut sebagai sistem yang tidak stabil (unstable). Pada sistem seperti ini
diperlukan intervensi/pengendalian dari luar untuk stabilisasi sistem tersebut.
Gambar 1.7 Respons dari Sistem yang Tidak Stabil
3. Optimasi Kinerja Suatu Proses Kimiawi
Kondisi operasi (temperatur, konsentrasi, tekanan, laju alir, dan lain-lain) pada
suatu proses dapat diubah-ubah untuk mendapatkan kondisi optimal yang
menghasilkan kinerja dan keuntungan yang maksimum.
Desain Sistem dan Sistem Kontrol
DESAIN SISTEMSetelah tahap analisis sistem selesai dilakukan, maka analis sistem telah mendapatkan gambaran dengan jelas apa yang harus dikerjakan. Tiba waktunya sekarang bagi analis sistem untuk memikirkan bagaimana membentuk system tersebut. Tahap ini disebut dengan desain sistem. Desain system dapat dibagi dalam dua bagian, yaitu
Bab I. Konsep Dasar Pengendalian Proses 6

desain sistem secara umum dan desain sistem terinci.
ARTI DESAIN SISTEMDesain sistem dapat didefinisikan sebagai berikut ini. Menurut Robert J.Verzello/John Reuter III:Tahap setelah analisis dari sikLus pengembangan sistem: pendefinisian dari kebutuhan-kebutuhan fungsional dan persiapan untuk rancang bangun implementasi, menggambarkan bagaimana suatu sistem dibentuk.Menurut John Burch & Gary Grudnitski:Desain sistem dapat didefinisikan sebagai penggambaran,dan pembuatan sketsa atau pengaturan dari beberapa terpisah ke daIam satu kesatuan yang utuh dan berfungsi.Menurut George M. Scott:Adalah Desain sistem menentukan bagaimana suatu sistem akan menyelesaikan apa yang mesti diselesaikan; tahap ini menyangkut mengkonfiguras dari komponen- komponen perangkat L unak dan perangkat keras dari suatu sistem sehingga setelah instalasi dari sistem akan benar-benar memuaskan rancang bangun yang telah di tetaplan pada akhir tahap analisis sistem).
Dengan demikian Desain Sistem dapat diartikan sebagai berikut : 1. Tahap setelah analis dari siklus pengembangan system 2. Pendefinisian dari kebutuhan-kebutuhan fungsional 3. Persiapan untuk rancang bangun implementasi 4. Menggambarkan bagaimana system terbentuk yang dapat berupa penggambaran, perencanaan dan pembuatan sketsa atau pengaturan dari beberapa elemen yang yang terpisah kedalam satu kesatuan yang utuh dan berfungsi 5. Termasuk menyangkut mengkonfigurasi dari komponen-komponen perangkat lunak dan perangkat keras dari suatu system.
TUJUAN DESAIN SISTEM Tahap desain sistem mempunyai dua maksud atau tujuan utama. yaitusebagai berikut ini.
Bab I. Konsep Dasar Pengendalian Proses 7
1. Untuk memenuhi kebutuhan kepada pemakai sistem.2. Untuk memberikan gambaran gambaran yang jelas dan rancang bangun yang lengkap kepada pemrogram dan ahli-ahli teknik lainnya yang terlibat.
DESAIN SISTEM KONTROLEra modernisasi ikut berimbas terhadap modernisasi alat baik di industri kecil maupun di industri besar. Peralatan di sebuah industri yang dulunya digerakkan manual oleh manusia kini mulai terotomatisasi yakni dikendalikan secara otomatis oleh mesin itu sendiri. Proses otomatisasi mesin dikenal dengan istilah sistem kontrol atau ada juga yang menyebut sistem pengendalian. Pentinganya mempelajari sistem pengendalian ini erat kaitannya dengan mengefisiensikan dan mengoptimalkan kerja mesin agar mampu kita atur sesuai dengan apa yang kita harapkan. Dan desain sistem kontrol itu sendiri adalah perencanaan, pembuatan sketsa, atau penggambaran bagaimana suatu sistem kontrol tersebut dirangkai atau dibentuk sehingga sistem kontrol tersebut bisa berfungsi seperti apa yang diharapkan.
SISTEM KONTROLPengertian sistem kontrol atau kendali adalah suatu kumpulan alat atau komponen yang saling berhubungan untuk mengendalikan atau mengontrol suatu sistem. Jadi sistem disini adalah suatu yang dikendalikan. Seperti sistem mobil, sistem pengisian, sistem mesin, dan lain-lain.Masukan dan keluaran merupakan variabel atau besaran fisis. Keluaran merupakan hal yang dihasilkan oleh kendalian atau kontrol, artinya yang dikendalikan; sedangkan masukan adalah yang mempengaruhi kendalian, yang mengatur keluaran. Kedua dimensi masukan dan keluaran tidak harus sama.
Pada sistem kendali dikenal sistem lup terbuka (open loop system) dan sistem lup tertutup (closed loop system). Sistem kendali lup terbuka atau umpan maju (feedforward control) umumnya mempergunakan pengatur (controller) serta aktuator kendali (control actuator) yang berguna untuk memperoleh respon sistem yang baik. Sistem kendali ini keluarannya tidak diperhitungkan ulang oleh controller. Suatu
Bab I. Konsep Dasar Pengendalian Proses 8

keadaan apakah plant benar-benar telah mencapai target seperti yang dikehendaki masukan atau referensi, tidak dapat mempengaruhi kinerja kontroler.
Sistem pengendali loop terbuka
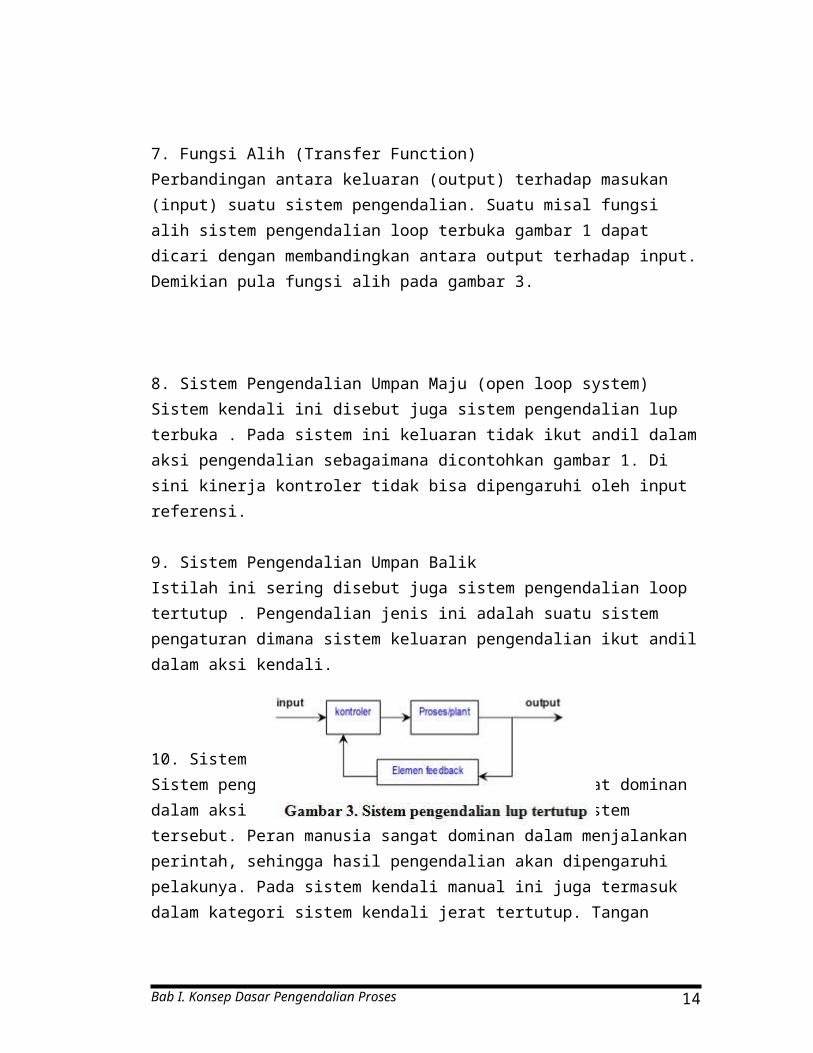
Pada sistem kendali yang lain, yakni sistem kendali lup tertutup (closed loop system) memanfaatkan variabel yang sebanding dengan selisih respon yang terjadi terhadap respon yang diinginkan. Sistem seperti ini juga sering dikenal dengan sistem kendali umpan balik. Aplikasi sistem umpan balik banyak dipergunakan untuk sistem kemudi kapal laut dan pesawat terbang. Perangkat sehari-hari yang juga menerapkan sistem ini adalah penyetelan temperatur pada almari es, oven, tungku, dan pemanas air.
Sistem pengendali loop tertutup
Dengan sistem kendali gambar 2, kita bisa ilustrasikan apabila keluaran aktual telah sama dengan referensi atau masukan maka input kontroler akan bernilai nol. Nilai ini artinya kontroler tidak lagi memberikan sinyal aktuasi kepada plant, karena target akhir perintah gerak telah diperoleh. Sistem kendali loop terbuka dan tertutup tersebut merupakan bentuk sederhana yang nantinya akan mendasari semua sistem pengaturan yang lebih kompleks dan rumit. Hubungan antara masukan (input) dengan keluaran (output) menggambarkan korelasi antara sebab dan akibat proses yang berkaitan. Masukan juga sering diartikan tanggapan keluaran yang diharapkan.Untuk mendalami lebih lanjut mengenai sistem kendali tentunya diperlukan pemahaman yang cukup tentang hal-hal yang berhubungan dengan sistem kontrol. Oleh karena itu selanjutnya akan dikaji beberapa istilah-istilah yang dipergunakannya.
Bab I. Konsep Dasar Pengendalian Proses 9

Istilah-istilah dalam sistem pengendalian adalah :
1. MasukanMasukan atau input adalah rangsangan dari luar yang diterapkan ke sebuah sistem kendali untuk memperoleh tanggapan tertentu dari sistem pengaturan. Masukan juga sering disebut respon keluaran yang diharapkan.
2. KeluaranKeluaran atau output adalah tanggapan sebenarnya yang didapatkan dari suatu sistem kendali.
3. PlantSeperangkat peralatan atau objek fisik dimana variabel prosesnya akan dikendalikan, msalnya pabrik, reaktor nuklir, mobil, sepeda motor, pesawat terbang, pesawat tempur, kapal laut, kapal selam, mesin cuci, mesin pendingin (sistem AC, kulkas, freezer), penukar kalor (heat exchanger), bejana tekan (pressure vessel), robot dan sebagainya.
4. ProsesBerlangsungnya operasi pengendalian suatu variabel proses, misalnya proses kimiawi, fisika, biologi, ekonomi, dan sebagainya.
5. SistemKombinasi atau kumpulan dari berbagai komponen yang bekerja secara bersama-sama untuk mencapai tujuan tertentu.
6. Diagram blokBentuk kotak persegi panjang yang digunakan untuk mempresentasikan model matematika dari sistem fisik. Contohnya adalah kotak pada gambar 1 atau 2.
7. Fungsi Alih (Transfer Function)
Bab I. Konsep Dasar Pengendalian Proses 10

Perbandingan antara keluaran (output) terhadap masukan (input) suatu sistem pengendalian. Suatu misal fungsi alih sistem pengendalian loop terbuka gambar 1 dapat dicari dengan membandingkan antara output terhadap input. Demikian pula fungsi alih pada gambar 3.
8. Sistem Pengendalian Umpan Maju (open loop system)Sistem kendali ini disebut juga sistem pengendalian lup terbuka . Pada sistem ini keluaran tidak ikut andil dalam aksi pengendalian sebagaimana dicontohkan gambar 1. Di sini kinerja kontroler tidak bisa dipengaruhi oleh input referensi.
9. Sistem Pengendalian Umpan BalikIstilah ini sering disebut juga sistem pengendalian loop tertutup . Pengendalian jenis ini adalah suatu sistem pengaturan dimana sistem keluaran pengendalian ikut andil dalam aksi kendali.
10. Sistem Pengendalian ManualSistem pengendalian dimana faktor manusia sangat dominan dalam aksi pengendalian yang dilakukan pada sistem tersebut. Peran manusia sangat dominan dalam menjalankan perintah, sehingga hasil pengendalian akan dipengaruhi pelakunya. Pada sistem kendali manual ini juga termasuk dalam kategori sistem kendali jerat tertutup. Tangan berfungsi untuk mengatur permukaan fluida dalam tangki. Permukaan fluida dalam tangki bertindak sebagai masukan, sedangkan penglihatan bertindak sebagai sensor. Operator berperan membandingkan tinggi sesungguhnya saat itu dengan
Bab I. Konsep Dasar Pengendalian Proses 11

tinggi permukaan fluida yang dikehendaki, dan kemudian bertindak untuk membuka atau menutup katup sebagai aktuator guna mempertahankan keadaan permukaan yang diinginkan.
11. Sistem Pengendalian OtomatisSistem pengendalian dimana faktor manusia tidak dominan dalam aksi pengendalian yang dilakukan pada sistem tersebut. Peran manusia digantikan oleh sistem kontroler yang telah diprogram secara otomatis sesuai fungsinya, sehingga bisa memerankan seperti yang dilakukan manusia. Di dunia industri modern banyak sekali sistem ken dali yang memanfaatkan kontrol otomatis, apalagi untuk industri yang bergerak pada bidang yang proses nya membahayakan keselamatan jiwa manusia.
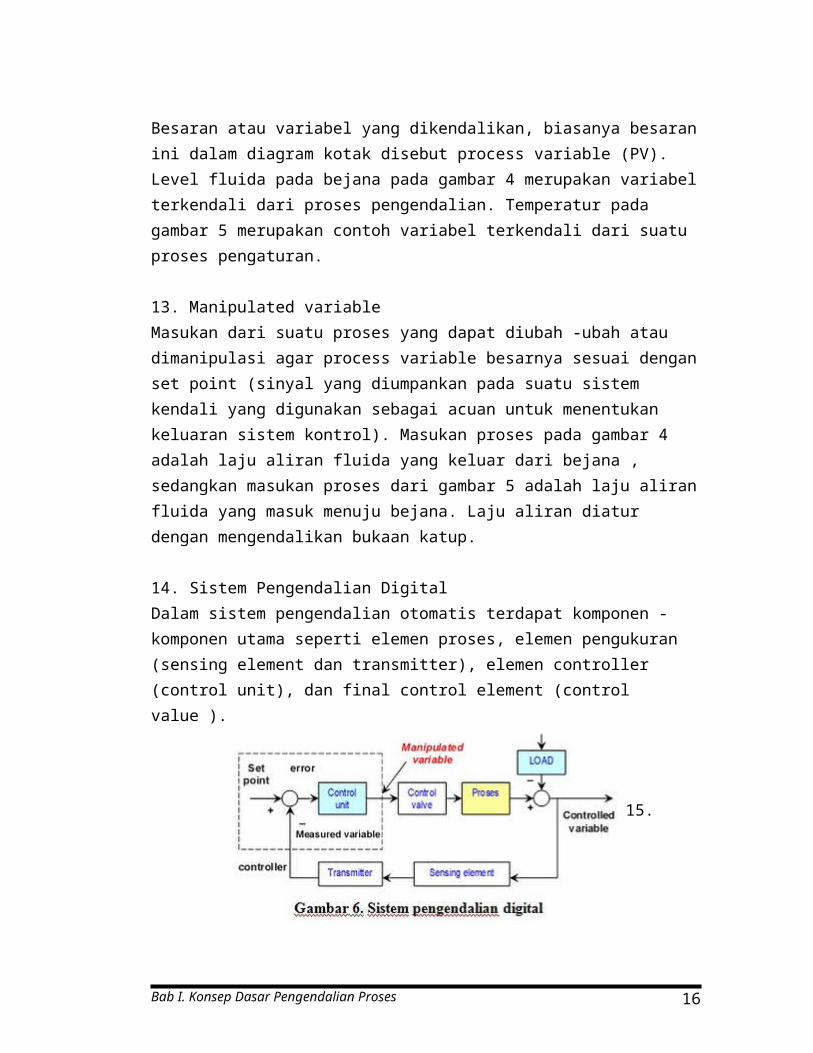
12. Variabel terkendali (Controlled variable)Besaran atau variabel yang dikendalikan, biasanya besaran ini dalam diagram kotak disebut process variable (PV). Level fluida pada bejana pada gambar 4 merupakan variabel terkendali dari proses pengendalian. Temperatur pada gambar 5 merupakan
Bab I. Konsep Dasar Pengendalian Proses 12

contoh variabel terkendali dari suatu proses pengaturan.
13. Manipulated variableMasukan dari suatu proses yang dapat diubah -ubah atau dimanipulasi agar process variable besarnya sesuai dengan set point (sinyal yang diumpankan pada suatu sistem kendali yang digunakan sebagai acuan untuk menentukan keluaran sistem kontrol). Masukan proses pada gambar 4 adalah laju aliran fluida yang keluar dari bejana , sedangkan masukan proses dari gambar 5 adalah laju aliran fluida yang masuk menuju bejana. Laju aliran diatur dengan mengendalikan bukaan katup.
14. Sistem Pengendalian DigitalDalam sistem pengendalian otomatis terdapat komponen -komponen utama seperti elemen proses, elemen pengukuran (sensing element dan transmitter), elemen controller (control unit), dan final control element (control value ).
15. Gangguan (disturbance)Suatu sinyal yang mempunyai k ecenderungan untuk memberikan efek yang melawan terhadap keluaran sistem pengendalian(variabel terkendali). Besaran ini juga lazim disebut load.
16. Sensing element
Bab I. Konsep Dasar Pengendalian Proses 13
Bagian paling ujung suatu sistem pengukuran ( measuring system) atau sering disebut sensor. Sensor bertugas mendeteksi gerakan atau fenomena lingkungan yang diperlukan sistem kontroler. Sistem dapat dibuat dari sistem yang paling sederhana seperti sensor on/off menggunakan limit switch, sistem analog, sistem bus paralel, sistem bus serial serta si stem mata kamera. Contoh sensor lainnya yaitu thermocouple untuk pengukur temperatur, accelerometer untuk pengukur getaran, dan pressure gauge untuk pengukur tekanan.
17. TransmitterAlat yang berfungsi untuk membaca sinyal sensing element dan mengubahnya supaya dimengerti oleh controller.
18. AktuatorPiranti elektromekanik yang berfungsi untuk menghasilkan daya gerakan. Perangkat bisa dibuat dari system motor listrik, sistem pneumatik dan hidrolik. Untuk meningkatkan tenaga mekanik aktuator atau torsi gerakan maka bisa dipasang sistem gear box atau sprochet chain.
19. TransduserPiranti yang berfungsi untuk mengubah satu bentuk energi menjadi energi bentuk lainnya atau unit pengalih sinyal. Suatu contoh mengubah sinyal gerakan mekanis menjadi energi listrik yang terjadi pada peristiwa pengukuran getaran. Terkadang antara transmiter dan tranduser dirancukan, keduanya memang mempunyai fungsi serupa. Transduser lebih bersifat umum, namun transmiter pemakaiannya pada sistem pengukuran.
20.Measurement VariableSinyal yang keluar dari transmiter, ini merupakan cerminan sinyal pengukuran.
21. Setting pointBesar variabel proses yang dikehendaki. Suatu kontroler akan selalu berusaha menyamakan variabel terkendali terhadap set point.
Bab I. Konsep Dasar Pengendalian Proses 14

22. ErrorSelisih antara set point dikurangi variabel terkendali. Nilainya bisa positif atau negatif, bergantung nilai set point dan variabel terkendali. Makin kecil error terhitung, maka makin kecil pula sinyal kendali kontroler terhadap plant hingga akhirnya mencapai kondisi tenang ( steady state)
23. Alat Pengendali (Controller)Alat pengendali sepenuhnya menggantikan peran manusia dalam mengendalikan suatu proses. Controller merupakan elemen yang mengerjakan tiga dari empat tahap pengaturan, yaitua. membandingkan set point dengan measurement variableb. menghitung berapa banyak koreksi yang harus dilakukan, danc. mengeluarkan sinyal koreksi sesuai dengan hasil perhitungannya,
24. Control UnitBagian unit kontroler yang menghitung besarnya koreksi yang diperlukan.
25. Final Controller ElementBagian yang berfungsi untuk mengubah measurement variable dengan memanipulasi besarnya manipulated variable atas dasar perintah kontroler.
26. Sistem Pengendalian KontinyuSistem pengendalian yang ber jalan secara kontinyu, pada setiap saat respon sistem selalu ada. Pada gambar 7. Sinyal e(t) yang masuk ke kontroler dan sinyal m(t) yang keluar dari kontroler adalah sinyal kontinyu.
Bab I. Konsep Dasar Pengendalian Proses 15
ELEMEN-ELEMEN SISTEM KONTROL PROSES
Elemen-elemen dalam suatu sistem kontrol proses dapat dibedakan menjadi : proses, sensor (sensing element), transducers, transmitter, transmission lines, kontroler, final control element (control valve). Seluruh elemen ini bersama-sama membentuk suatu sistem kontrol, seperti diperlihatkan pada contoh sistem kontrol proses pada Gambar contoh sederhana dari sebuah sistem kontrol proses.
Sistem ini terdiri dari sebuah tanki, sebuah level measuring device, sebuah kontroler, dan sebuah control valve. Aliran liquid dialirkan melalui permukaan atas tanki, kemudian dikeluarkan dari bawah tanki yang diatur oleh control valve.
Gambar contoh sederhana dari sebuah sistem kontrol proses
Tangki beserta liquid di dalamnya merupakan sebuah proses. Level measuring device sebagai sebuah sensor ketinggian sekaligus transducer, akan mengukur ketinggian cairan tersebut serta mengubahnya menjadi besaran elektrik atau pneumatik. Jika level cairan dalam tanki melebihi tinggi yang diinginkan (set point) maka controller akan memutuskan untuk memperbesar aliran outlet. Berdasarkan perintah controller, final control element (control valve) akan membuka (opening) untuk memperbesar aliran. Secara blok diagram sistem control proses tersebut di atas dapat dilihat pada gambar dibawah ini.
Gambar Blok Diagram Sistem Kontrol Proses
a. ProsesProses adalah peralatan (equipment) bersama-sama dengan reaksi fisis ataupun kimia yang terjadi di dalamnya.
b. Sensor (Sensing Element)
Bab I. Konsep Dasar Pengendalian Proses 16

Instrumen-instrumen pengukur (sensor) adalah instrumen-instrumen yang digunakan untuk pengukuran (measurement). Variabel-variabel yang diukur adalah Process Variables (PV). Instrumen ini juga digunakan untuk memperoleh informasi tentang apa yang sedang terjadi di dalam suatu proses.
Dalam suatu sistem kontrol dapat dijumpai berbagai macam sensor yang berbeda dalam fungsinya. Sensor-sensor yang digunakan akan berbada tergantung dari process variable yang akan diukur. Jenis-jenis sensor tersebut adalah sebagai berikut: Pressure Sensor, Temperature Sensor, Flow Sensor, Liquid Level Sensor dan Composition Sensor.
c. Transducers / TransmitterBeberapa sinyal pengukuran tidak dapat digunakan untuk aktuasi
pengontrolan sebelum dikonversi ke dalam besaran-besaran fisis tertentu (sinyal elektrik atau sinyal pneumatik). Setelah dikonversi ke dalam sinyal elektrik atau pneumatik, sinyal hasil pengukuran tersebut dapat ditransmisikan dengan mudah dan juga dapat dimengerti oleh kontroller.
Konversi ini dilakukan oleh suatu elemen yang disebut transducers / transmitter. Sebagai contoh, strain gauges dapat mengubah sinyal pressuremenjadi sinyal elektrik.
d. Transmission LinesSaluran transmisi (transmission lines) membawa sinyal hasil pengukuran oleh
sensor dan telah diubah oleh transducer/transmitter ke kontroler atau dari kontroler ke final control element.
Saluran transmisi dapat berupa sinyal pneumatik (udara yang terkompresi). Namun, seiring dengan berkembangnya kontroler elektronik analog dan khususnya kontroler digital, saat ini kebanyakan menggunakan sinyal elektrik sebagai saluran transmisinya. Sesuai dengan standard ISA (Instrument Society of America), besarnya sinyal transmisi tersebut adalah :
· Sinyal Pneumatik : 3 – 15 psig (0.2 – 1 kg/cm2)· Sinyal Elektrik : 4 – 20 mA.
psig = pounds per square inchies (gauge)tujuan dari standardisasi tersebut adalah untuk kemudahan pengguna dalam memilih instrumen, juga kemudahan dalam perancangan, kalibrasi, dan pemeliharaan.
e. ControllerController memperoleh informasi dari measuring device yaitu sinyalProcess
Variable (PV), membandingkan dengan Set Point (SP), menghitung banyaknya koreksi yang diperlukan sesuai dengan algoritmanya (P, PI, dan PID), dan kemudian memutuskan atau mengeluarkan sinyal koreksi (Manipulated Variable / MV) untuk ditransmisikan ke Control Valve.
Controller dapat berupa controller mekanik (pneumatic), controllerelektronik atau controller digital yang terkomputerisasi dengan kemampuan dapat melaksanakan tugas-tugas kontrol yang cukup rumit.
Bab I. Konsep Dasar Pengendalian Proses 17
f. Final Control Element (Control Valve)Salah satu elemen pengendali akhir yang sering dijumpai adalahcontrol valve.
Elemen ini mengimplementasikan keputusan yang diambil oleh kontroler. Misalnya, apabila kontroler “memutuskan” untuk menaikkan laju aliaran (flow rate) suatu fluida, maka control valve akan membuka atau menutup untuk mengimplementasikannya.
Bab I. Konsep Dasar Pengendalian Proses 18