13. autonomous vehicle - yonsei universityweb.yonsei.ac.kr/hgjung/lectures/aue853/13 autonomous...
TRANSCRIPT


E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2004 [1][2]DARPA Grand Challenge 2004 [1][2]
• 30 Jul. 2002: Challenge announced
- 140 miles(~225km) from Barstow, California to Primm, Neveda
- On 13 Mar. 2004
- Within 10 hours
- 1 million dollars
http://www.darpa.mil/grandchallenge04/

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2004 [1][2]DARPA Grand Challenge 2004 [1][2]

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2004 [1][2]DARPA Grand Challenge 2004 [1][2]
• None of the 15 finalists completes more than 7.4 miles of the course.
Sandstorm, Carnegie Mellon University http://en.wikipedia.org/wiki/Sandstorm_(vehicle)
• M998 HMMWV
• 1 steerable LIDAR
• 3 fixed LIDAR
• 1 FMCW radar
• 1 stereo camera
• GPS/INS (Inertial Navigation System)

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
• 8 Jun. 2004: Challenge announced
- 132 miles(~212km), Primm, Neveda
- On 8 Oct. 2005
- Within 10 hours
- 2 million dollars
http://www.darpa.mil/grandchallenge05/index.html

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
• 8 Aug. 2004: Participants Conference
• 15 Feb. 2005: 195 teams had applied.
• 15 Apr. 2005: Teams were required to submit a video of their vehicle in action.
118 teams were selected to advance to the next stage.
• Early May 2005: Visiting assessment (standard 200m test course with two turns).
Late May 2005: 40 teams were selected as semifinalists and invited to participate in
the National Qualification Event (NQE).
23 Aug. 2005: 3 teams were selected from 10 alternates.
• 28 Sep. ~ 5 Oct. 2005: NQE, 23 teams were qualified for the race on Oct. 8.
• 8 Oct. 2005: 5 vehicles successfully completed the race.
The NQE course layout
http://www.darpa.mil/GRANDCHALLENGE/docs/Grand_Challenge_2005_Report_to_Congress.pdf

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
http://www.darpa.mil/grandchallenge05/gcorg/index.html
B
E
G
H
K
A

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
• Specific race course was released on two hours before the race.
• DARPA-defined Route Definition Data Format (RDDF)
- a list of longitudes, latitudes, and corridor widths
- a list of associated speed limits
Race Rules
The corridor varies in width and maximum speed.
Waypoints are more frequent in turns.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
• In the 2005 race, the RDDF contained 2,935 waypoints.
• The width of the road: 3~30m
• Speed limits: 5~50 MPH
• Starting one after another at 5 minute intervals.
• When a faster robot overtook a slower one, the slower robot was paused by DARPA officials, allowing the second robot to pass the first as if it were a static obstacle.
Race Rules
The RDDF defined the approximate route that robots would take, so no no global path planning was requiredglobal path planning was required.
As a result, the race was primarily a test of highhigh--speed road finding and speed road finding and obstacle detection and avoidance in desert terrainobstacle detection and avoidance in desert terrain.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2005 [1][2]DARPA Grand Challenge 2005 [1][2]
• Five vehicles successfully completed the race:
Over 10 hour limit, fifth place12:51Oshkosh Truck Corporation, Oshkosh, WisconsinTeam TerraMaxTerraMax
Fourth place7:30The Gray Insurance Company, Metairie, LouisianaTeam GrayKat-5
Third place7:14Red Team TooH1ghlander
Second place7:05Carnegie Mellon University, Pittsburgh, Pennsylvania
Red TeamSandstorm
First place6:54Stanford University, Palo Alto, CaliforniaStanford Racing TeamStanley
ResultTime Taken(h:m)
Team HomeTeam NameVehicle

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Team Composition
• Vehicle (drive-by-wire, sensor, computer): VW
• Software: Stanford
• Test: another team of Stanford
• Communication: Mohr David Ventures

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Sensing System5 SICK laser range finders, with slightly different tilt angles: cross section of the approaching terrain at different ranges out to 25m in front of the vehicle.
2 radars: 24GHz radars, supplied by Smart Microwave Sensors (SMS), up to 200m, FOV (azimuth): 20 degrees
1 Color camera: long-range road perception
GPS positioning, GPS compass: L1/L2/Omnistar HP receiver, trunk-mounted inertial measurement unit (IMU)

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Computing System
• 6 Pentium M computers
1 for video processing
2 for recognition and control
1 for data log
2 were idle
• Gigabit Ethernet switch, various
devices that interface to the physical
sensors and actuators
• The operating system run on all
computers is Linux. Linux was chosen
due to its excellent networking and
time sharing capabilities.
• A Shock-mounted rack
• Special air ducts direct air flow from the vehicle’s air conditioning system into the trunk for cooling
• A custom-made power system with backup batteries

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Software Architecture
Before both the 2004 and 2005 Grand Challenges, DARPA revealed to the competitors that a stock 4WD pickup truck would be physically capable of traversing the entire course.
These announcements suggested that the innovations necessary to successfully complete the
challenge would be in designing intelligent driving software, not in designing exotic designing intelligent driving software, not in designing exotic vehiclesvehicles.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Software Architecture
30 modules in parallel, six layers

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Laser Terrain Mapping
• 5 single-scan laser range finders mounted on the roof, tilted downward to scan the road ahead
• Each scan: 181 measurements spaced 0.5 degrees apart
• Obstacle detection: assigning to each 2D location in a surface grid one of three possible values: occupied, free, and unknown
An underpass A road

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Computer Vision Terrain Analysis
• Obstacle detection: laser ~ 22m, vision ~ 70m
• The vision analysis serves as an early warning system for obstacles.
• Stanley finds drivable surfaces by projecting drivable area from the laser analysis into the camera image.
• A mixture of Gaussian that model the color of drivable terrain

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Stanley, Stanford University [1][2]Stanley, Stanford University [1][2]
Path Planning
• Path smoothing
• Online path planning
Nudges: with minimum acc.
Swerves: with maximum acc.
At every time step, the planner considers trajectories drawn from a 2D space of maneuvers. The first dimension describes the amount of lateral offset to be added to the current trajectory. This parameter allows Stanley to move left and right, while still staying essentially parallel to the base trajectory. The second dimension describes the rate at which Stanley will attempt to change to this lateral offset.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
http://www.darpa.mil/grandchallenge/index.asp
• 1 May 2006: Challenge announced
- 3 Nov. 2007
- 60 mile urban area, within 6 hours
- 1st: 2M$, 2nd: 1M$, 3rd: 0.5M$
• George AFB in Victorville, California
City Driving• Obey traffic laws• Safe entry into traffic flow• Safe passage through busy intersections• Safe following or passage of moving vehicles• Safe passage of a stopped vehicle• Drive an alternate route when the primary
route is blocked• Safe U-turn

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
• 1 May 2006: Program Announcement
• 20 May 2006: Participants Conference
• 10 May 2007: Site Visit Selection Announcement
• 11 Jun. ~ 20 Jul. 2007: Site Visit (89 teams)
• 9 Aug. 2007: Semifinalist Announcement
Location Announcement
• 24-25 Oct. 2007: Teams Arrive
• 26-31 Oct. 2007: National Qualification Event (NQE) (35 teams)
• 1 Nov. 2007: Route Network Definition File (RNDF) was released.
• 3 Nov. 2007: Urban Challenge Final Event (11 teams)
Mission Definition File (MDF) was released 5minutes before the launch.
6 teams completed the mission.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Rules
DARPA will provide the Route Network Definition File (RNDF)
- All accessible road segments
- Waypoints, lane widths
- Stop sign locations, checkpoint locations, and parking spot locations
- The route network has no implied start or end points.
- Road blockages will not be indicated in the RNDF
DARPA will also provide a Mission Data File (MDF)
- Checkpoints that must be reached
- Minimum and maximum speed limits for the road segments

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Rules
Thirty manned traffic vehicles were also released onto the
course to increase traffic density. This fleet of Ford Tauruses
were retrofitted with safety cages, race seats, fire systems,
radios and tracking systems, and were driven by
professional drivers. In all, over 50 vehicles, both manned
and unmanned, were navigating the city streets
simultaneously during the final event.
Many equivalent routes are possible:

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Rules

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Rules

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
National Qualification Event The qualifying rounds included 3 areas: A, B, and C.
Area A
- Robot’s ability to merge
Area B
- A long suburban route
- Parking, navigation, and avoiding stalled cars along the way
Area C
- Several loops into two 4-way intersections
- Robot’s ability to re-plan routes by road-blocking
Diagram of qualification area A

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Urban Challenge Event (UCE)

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Urban Challenge Event (UCE)

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Urban Challenge Event (UCE)
Off-road areas Vehicles are expected to navigate roads with unpaved surfaces inoff road areas. These roads are passable in a passenger vehicle, but are impassable off the road. These roads will not have marked centerlines or stop lines.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
DARPA Grand Challenge 2007 (Urban Challenge) [3][4]DARPA Grand Challenge 2007 (Urban Challenge) [3][4]
Urban Challenge Event (UCE)
• 6 teams completed the mission.
One of 6 teams to finish courseOver 6 hour limit
Cornell University, Ithaca, New York
2007 Chevy TahoeSkynet26Cornell
One of 6 teams to finish courseOver 6 hour limit
University of Pennsylvania, Lehigh University, Philadelphia, Pennsylvania
2006 Toyota PriusLittle Ben
74The Ben Franklin Racing Team
4th Place.[17]Approx. 6 hours
MIT, Cambridge, Massachusetts
Land Rover LR3Talos79MIT
3rd Place; averaged slightly less than 13 miles per hour (21 km/h)
throughout the course[13]
4:36:38Virginia Tech, Blacksburg, Virginia
2005 Ford Hybrid Escape
Odin32[16]VictorTango
2nd Place; averaged about 13.7 miles per hour (22.0 km/h)
throughout the course[13][15]
4:29:28Stanford University, Palo Alto, California
2006 Volkswagen Passat Wagon
Junior03Stanford Racing
1st Place; averaged approximately 14 miles per hourthroughout the course [13][14]
4:10:20Carnegie Mellon University, Pittsburgh, Pennsylvania
2007 Chevy TahoeBoss19Tartan Racing
ResultTime Taken(h:m:s)
Team LocationTypeVehicleID#Team Name

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Boss, CMU [3][4]Boss, CMU [3][4]
Team Composition
• Carnegie Mellon University (CMU)
• General Motors
• Caterpillar
• Continental
• Intel

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Boss, CMU [3][4]Boss, CMU [3][4]
Sensing System
• Active sensing is used predominantly.
2
5
2
2
1
6
개수

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
360360°° Scanning Laser RadarScanning Laser Radar
Velodyne http://www.velodyne.com/lidar/lidar.aspx
64 lasers are mounted on upper and lower blocks of 32 lasers each and the entire unit spins.
This design allows for 64 separate lasers to each fire thousands of times per second, providing exponentially more data points per second and a much richer point cloud than conventional designs.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
360360°° Scanning Laser RadarScanning Laser Radar
Velodyne

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
360360°° Scanning Laser RadarScanning Laser Radar
Velodyne
The HD Lidar Concept
Velodyne’s unique HD Lidar technology lets you focus your efforts on control algorithms, image parsing and application-specific processing instead of multi-sensor mounting, debugging and integration.

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
360360°° Scanning Laser RadarScanning Laser Radar
Velodyne
Overpasses
http://www.velodyne.com/lidar/downloads/videos/Overpasses_F_7_8_13.mov
Thru Truss Bridgehttp://www.velodyne.com/lidar/downloads/videos/ThruTrussBridge_F10.mov

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Google Autonomous Vehicle [5]Google Autonomous Vehicle [5]
10 Sep. 2010
Two people in car –
driver to take over in an emergency, and engineer to monitor software
“Our self-driving cars have logged over 140,000 miles.”

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
VisLabVisLab VIACVIAC
The VisLab Intercontinental Autonomous Challenge (VIAC) http://viac.vislab.it/
• Parma, Italy ~ Shanghai, China: 13,000km
-26 Jul. 2010: departure from Parma
-26 Oct. 2010: arrival in Shanghai
-28 Oct. 2010: event at the Shanghai Expo
• The base vehicle is an Electric Porter Piaggio
(named ‘zero emissions’) featuring electric
propulsion.
• The autonomous driving technology installed on
this vehicle is not affecting its performance since
the sensors, the processing systems, and the
actuation devices are all powered by solar energy,
thus they do not drain anything from the original
batteries.
• 2 autonomous vehicles in a platoon

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
VisLabVisLab VIACVIAC
Leader-Follower
Systems under Testing
• leader-follower • stop-and-go • waypoint following • vehicle detection • lane detection • pedestrian detection • obstacle detection • ditch and berms detection for off-road driving • panoramic viewing system • terrain mapping and slope estimation
The First Vehicle
• autonomously for most of the trip• tests on sensing, decision, and control subsystems
• although limited, human interventions are needed to define the route and intervene in critical situations.
The Second Vehicle
• Following the route defined by the preceding vehicle.
• 100% autonomous


E-mail: [email protected]://web.yonsei.ac.kr/hgjung
VisLabVisLab VIACVIAC
Range Sensors & Localization Unit

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?s Next?
1. Production grade autonomous vehicle
2. Communication-based (cooperative) autonomous vehicle
Social agreement: legislation, infrastructure and insurance

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Product Grade Autonomous Vehicles Next?: Product Grade Autonomous Vehicle
BRAiVE (BRAin-drIVE) http://www.braive.vislab.it/index.php

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Product Grade Autonomous Vehicles Next?: Product Grade Autonomous Vehicle
BRAiVE (BRAin-drIVE) http://www.braive.vislab.it/index.php

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
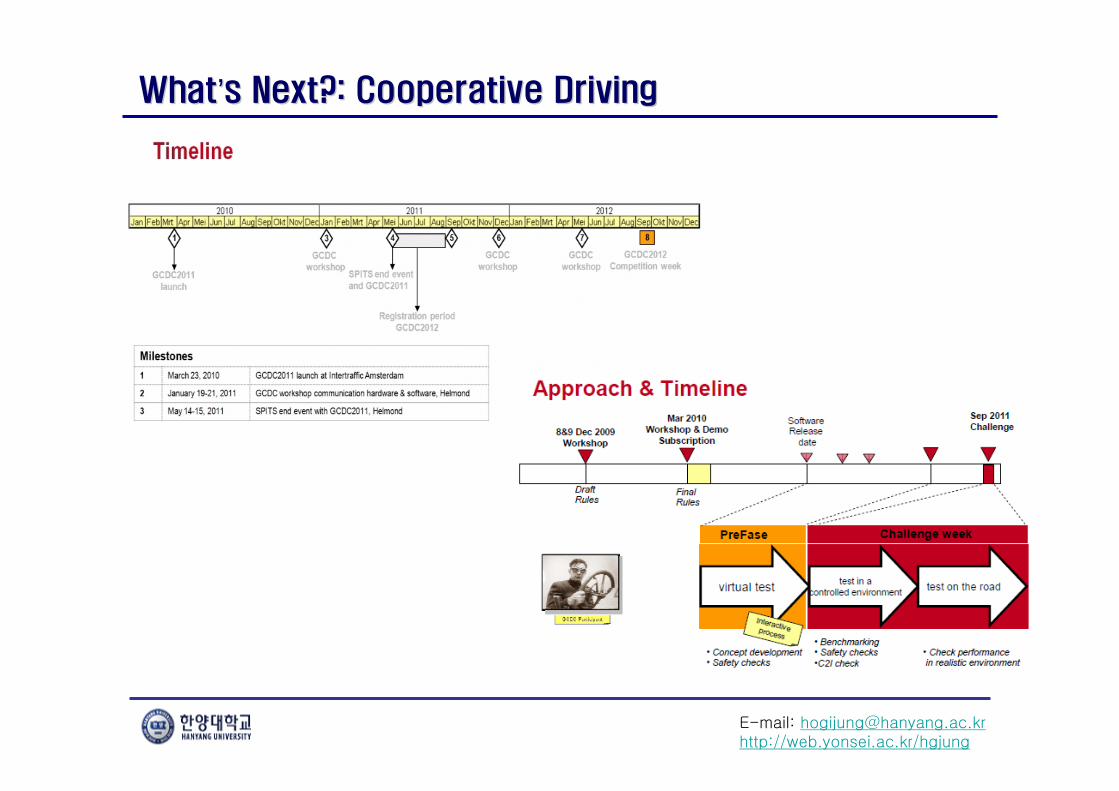
WhatWhat’’s Next?: Cooperative Drivings Next?: Cooperative Driving
Grand Cooperative Driving Challenge (GCDC) http://www.gcdc.net/

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Cooperative Drivings Next?: Cooperative Driving

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Cooperative Drivings Next?: Cooperative Driving
E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Cooperative Drivings Next?: Cooperative Driving

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
WhatWhat’’s Next?: Cooperative Drivings Next?: Cooperative Driving
highway A270 between Helmond and Eindhoven

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Korea: Korea: 현대기아현대기아 자율주행자동차자율주행자동차 경진대회경진대회
http://www.ngvtek.com/techcontest/

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
• 실차 기반의 포장/비포장로 무인자율주행 연구경진대회
- 도로환경, 장애물 인지/판단하고, 자율적으로 차량의 조향/가감속 등을 제어하여 무인주행
- 장애물회피, 일시정지, 터널통과 등 미션 수행
• 참가자격 국내 대학(원)생 (대학別 연구실 중심 1팀)
• 지원 본선진출팀에게 팀당 차량제작비 7,000만원, 차량 1대 등 지원
• 시상
- 1등 1억
- 2등 5,000만원
- 3등 3,000만원
대회안내
Korea: Korea: 현대기아현대기아 자율주행자동차자율주행자동차 경진대회경진대회

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
Rule
Korea: Korea: 현대기아현대기아 자율주행자동차자율주행자동차 경진대회경진대회
http://www.ngvtek.com/techcontest/download/rule.pdf
• 예선
- 1차 서류심사, 2차 방문심사
• 차량제작 및 현장실사
• 본선
- 총 길이 4km, 폭 5~10m의 포장/비포장 도로
- 출발점, 도착점, 주행코스의 전자지도 제공

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
대회결과
Korea: Korea: 현대기아현대기아 자율주행자동차자율주행자동차 경진대회경진대회
1등: 한양대 A1팀
2등: 서울대 SNUCLE(스누클)팀
본선 참가 11개 팀
3등: 국민대 NOVA팀
http://kr.aving.net/news/view.php?articleId=174263&Branch_ID=kr&rssid=naver&mn_name=news

E-mail: [email protected]://web.yonsei.ac.kr/hgjung
ReferencesReferences
1. Martin Buehler, Karl Iagnemma, and Sanjiv Singh, The 2005 DARPA Grand Challenge: The Great Robot Race, Springer-Verlag Berlin Heidelberg 2007.
2. Wikipedia, “DARPA Grand Challenge,”http://en.wikipedia.org/wiki/Darpa_grand_challenge
3. Martin Buehler, Karl Iagnemma, Sanjiv Singh, The DARPA Urban Challenge: Autonomous Vehicles in City Traffic, Springer-Verlag Berlin Heidelberg 2009.
4. Wikipedia, “DARPA Grand Challenge (2007),”http://en.wikipedia.org/wiki/DARPA_Grand_Challenge_(2007)
5. The Official Google Blog, “What we’re driving at,”http://googleblog.blogspot.com/2010/10/what-were-driving-at.html