1 placement optimization of energy and information access
TRANSCRIPT
arX
iv:1
505.
0653
0v2
[cs.
NI]
9 D
ec 2
015
1
Placement Optimization of Energy and Information
Access Points in Wireless Powered Communication
Networks
Suzhi Bi, Member, IEEEand Rui Zhang,Senior Member, IEEE
Abstract
The applications of wireless power transfer technology to wireless communications can help build a wireless
powered communication network (WPCN) with more reliable and sustainable power supply compared to the
conventional battery-powered network. However, due to thefundamental differences in wireless information and
power transmissions, many important aspects of conventional battery-powered wireless communication networks
need to be redesigned for efficient operations of WPCNs. In this paper, we study the placement optimization of
energy and information access points in WPCNs, where the wireless devices (WDs) harvest the radio frequency
energy transferred by dedicated energy nodes (ENs) in the downlink, and use the harvested energy to transmit
data to information access points (APs) in the uplink. In particular, we are interested in minimizing the network
deployment cost with minimum number of ENs and APs by optimizing their locations, while satisfying the energy
harvesting and communication performance requirements ofthe WDs. Specifically, we first study the minimum-
cost placement problem when the ENs and APs are separately located, where an alternating optimization method
is proposed to jointly optimize the locations of ENs and APs.Then, we study the placement optimization when
each pair of EN and AP are co-located and integrated as a hybrid access point, and propose an efficient algorithm
to solve this problem. Simulation results show that the proposed methods can effectively reduce the network
deployment cost and yet guarantee the given performance requirements, which is a key consideration in the future
applications of WPCNs.
Index Terms
Wireless power transfer, wireless powered communication networks, energy harvesting, network planning,
node placement optimization.
This work will be presented in part at the IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, Dec. 6-10,2015. This work was supported in part by the National NaturalScience Foundation of China (Project number 61501303).
S. Bi is with the College of Information Engineering, Shenzhen University, Shenzhen, Guangdong, China 518060 (e-mail:[email protected]).
R. Zhang is with the Department of Electrical and Computer Engineering, National University of Singapore, Singapore 117583, and alsowith the Institute for Infocomm Research, A∗STAR, Singapore 138632 (e-mail:[email protected]).
December 10, 2015 DRAFT

2
I. INTRODUCTION
Modern wireless communication systems, e.g., cellular networks and wireless sensor networks (WSNs),
are featured by larger bandwidth, higher data rate and lowercommunication delays. The improvement on
communication quality and the increased data processing complexity have imposed higher requirement on
the quality of power supply to wireless devices (WDs). Conventionally, WDs are powered by batteries,
which have to be replaced/recharged manually once the energy is depleted. Alternatively, the recent
advance of radio frequency (RF) enabled wireless power transfer (WPT) provides an attractive solution
to power WDs over the air [1], [2]. By leveraging the far-fieldradiative properties of microwave, WDs
can harvest energy remotely from the RF signals radiated by the dedicated energy nodes (ENs) [3].
Compared to the conventional battery-powered methods, WPTcan save the cost due to manual battery
replacement/recharging in many applications, and also improve the network performance by reducing
energy outages of WDs. Currently, tens of microwatts (µW) RF power can be effectively transferred to
a distance of more than10 meters.1 The energy is sufficient to power the activities of many low-power
communication devices, such as sensors and RF identification (RFID) tags. In the future, we expect more
practical applications of RF-enabled WPT to wireless communications thanks to the rapid developments
of many performance enhancing technologies, such as energybeamforming with multiple antennas [4]
and more efficient energy harvesting circuit designs [5].
In a wireless powered communication network (WPCN), the operations of WDs, including data trans-
missions, are fully/partially powered by means of RF-enabled WPT [6]–[14]. A TDMA (time division
multiple access) based protocol for WPCN is first proposed in[6], where the WDs harvest RF energy
broadcasted from a hybrid access point (HAP) in the first timeslot, and then use the harvested energy
to transmit data back to the HAP in the second time slot. Later, [7] extends the single-antenna HAP in
[6] to a multi-antenna HAP that enables more efficient energytransmission via energy beamforming as
well as more spectrally efficient SDMA (space division multiple access) based information transmission
as compared to TDMA. To further improve the spectral efficiency, [8] considers using full-duplex HAP
in WPCNs, where a HAP can transmit energy and receive user data simultaneously via advanced self-
interference cancelation techniques. Intuitively, usinga HAP (or co-located EN and information AP),
instead of two separated EN and information access point (AP), to provide information and energy access
is an economic way to save deployment cost, and the energy andinformation transmissions in the network
1Based on the product specifications on the website of Powercast Co. (http://www.powercastco.com), with TX91501-3W power transmitterand P2110 Powerharvester receiver, the harvest RF power at adistance of10 meters is about40 µW.
December 10, 2015 DRAFT

3
can also be more efficiently coordinated by the HAP. However,using HAP has an inherent drawback that
it may lead to a severe “doubly-near-far” problem due to distance-dependent power loss [6]. That is, the
far-away users quickly deplete their batteries because they harvest less energy in the downlink (DL) but
consume more energy in the uplink (UL) for information transmission. To tackle this problem, separately
located ENs and APs are considered to more flexibly balance the energy and information transmissions
in WPCNs [9]–[11]. In this paper, we consider the method using either co-located or separate EN and
information AP to build a WPCN.
Most of the existing studies on WPCNs focus on optimizing real-time resource allocation, e.g., transmit
signal power, waveforms and time slot lengths, based on instantaneous channel state information (CSI,
e.g., [6]–[8]). In this paper, we are interested in the long-term network performance optimization based
mainly on the average channel gains. It is worth mentioning that network optimizations in the two
different time scales are complementary to each other in practice. That is, we use long-term performance
optimization methods for the initial stage of network planning and deployment, while using short-term
optimization methods for real-time network operations after the deployment. Many current works on
WPCNs use stochastic models to study the long-term performance because of the analytical tractability,
especially when the WDs are mobile in location. For instance, [9] applies a stochastic geometry model
in a cellular network to derive the expression of transmission outage probability of WDs as a function of
the densities of ENs and information APs. Similar stochastic geometry technique is also applied to WPT-
enabled cognitive radio network in [10] to optimize the transmit power and node density for maximum
primary/secondary network throughput. However, in many application scenarios, the locations of the WDs
are fixed, e.g., a sensor network with sensor (WD) locations predetermined by the sensed objects, or an
IoT (internet-of-things) network with static WDs. In this case, a practical problem that directly relates
to the long-term performance of WPCNs, e.g., sensor’s operating lifetime, is to determine the optimal
locations of the ENs and APs. Nonetheless, this important node placement problem in WPCNs is still
lacking of concrete studies.
In conventional battery-powered wireless communication networks, node placement problem concerns
the optimal locations of information APs only, which has been well investigated especially for wireless
sensor networks using various geometric, graphical and optimization algorithms (see e.g., [15]–[19]).
However, there exist major differences between the node placement problems in battery-powered and
WPT-enabled wireless communication networks. On one hand,a common design objective in battery-
powered wireless networks is to minimize the highest transmit power consumption among the WDs to
December 10, 2015 DRAFT

4
satisfy their individual transmission requirements. However, such energy-conservation oriented design is
not necessarily optimal for WPCNs, because high power consumption of any WD can now be replenished
by means of WPT via deploying an EN close to the WD. On the otherhand, unlike information
transmission, WPT will not induce harmful co-channel interference to unintended receivers, but instead
can boost their energy harvesting performance. These evident differences indicate that the node placement
problem in battery-powered wireless communication networks should be revisited for WPCNs, to fully
capture the advantages of WPT.
In this paper, we study the node placement optimization problem in WPCNs, which aims to minimize
the deployment cost on ENs and APs given that the energy harvesting and communication performances
of all the WDs are satisfied. Our contributions are detailed below.
1) We formulate the optimal node placement problem in WPCNs using either separated or co-located
EN and AP. To simplify the analysis, we then transform the minimum-cost deployment problem
into its equivalent form that optimizes the locations of fixed number of ENs and APs;
2) The node placement optimization using separated EN and APis highly non-convex and hard to
solve. To tackle the non-convexity of the problem, we first propose an efficient cluster-based greedy
algorithm to optimize the locations of ENs given fixed AP locations. Then, a trial-and-error based
algorithm is proposed to optimize the locations of APs givenfixed ENs locations. Based on the
obtained results, we further propose an effective alternating method that jointly optimizes the EN
and AP placements;
3) For the node placement optimization using co-located EN and AP (or HAP), we extend the greedy
EN placement method under fixed APs to solving the HAP placement optimization, which is
achieved by incorporating additional considerations of dynamic WD-HAP associations during HAP
placement. Specifically, a trial-and-error method is used to solve the WD-HAP association problem,
which eventually leads to an efficient greedy HAP placement algorithm.
Due to the non-convexity of the node placement problems in WPCNs, all the proposed algorithms are
driven by the consideration of their applicabilities to large-size WPCNs, e.g., consisting of hundreds of
WDs and EN/AP nodes. Specifically, we show that the proposed algorithms for either separated or co-
located EN and AP placement are convergent and of low computational complexity. Besides, simulations
validate our analysis and show that the proposed methods caneffectively reduce the network deployment
cost to guarantee the given performance requirements. The proposed algorithms may find their wide
application in the future deployment of WPCNs, such as wireless sensor networks and IoT networks.
December 10, 2015 DRAFT

5
Energy
receiver
Information
transmitter
Power supply
EN1
AP1
AP2
AP3
WD1 WD2
WDK
WD3
Energy flow Information flow
EN2
f1
f2
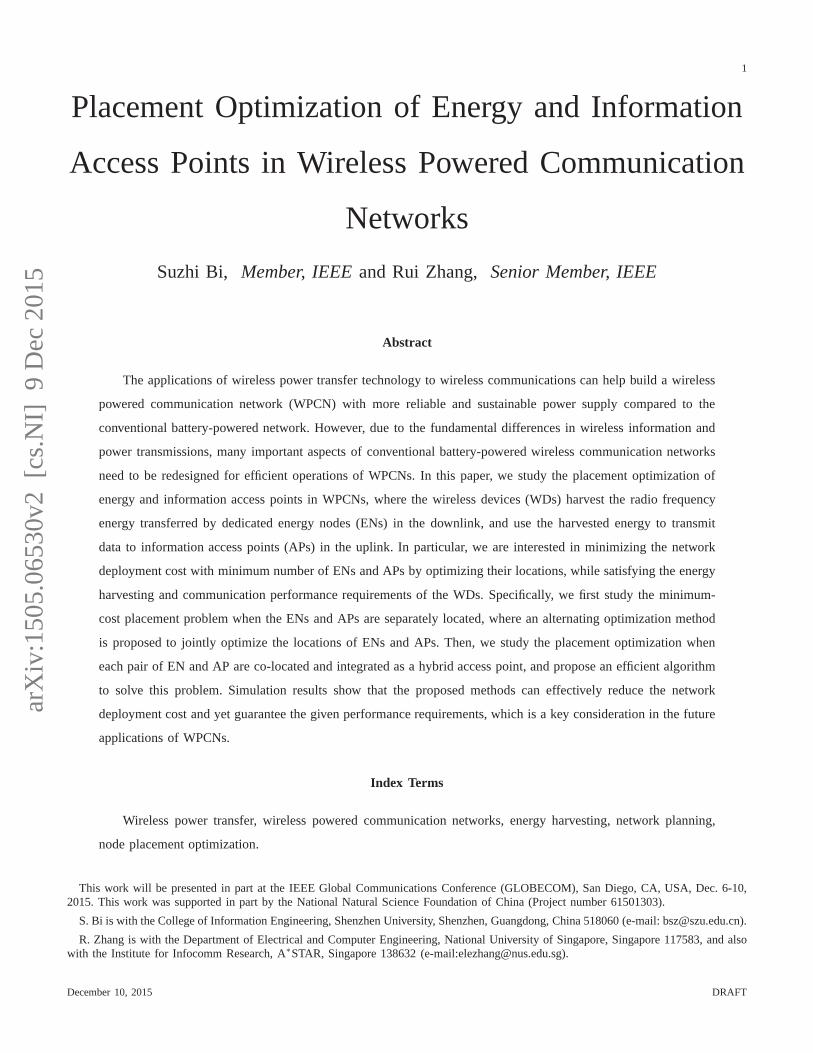
Fig. 1. Schematics of a WPCN with separate ENs and APs.
The rest of the paper is organized as follows. In Section II, we first introduce the system models
of WPCN where the ENs and APs are either separated or co-located. Then, we formulate the optimal
node placement problems for the two cases in Section III, andpropose efficient algorithms to solve the
problems in Sections IV and V, respectively. In Section VI, simulations are performed to evaluate the
performance of the proposed node placement methods. Finally, we conclude the paper and discuss future
working directions in Section VII.
II. SYSTEM MODEL
A. Separated ENs and APs
For the case of separated ENs and APs, we consider in Fig. 1 a WPCN in R2 consisting ofM
ENs,N APs andK WDs, whose locations are denoted by2× 1 coordinate vectors{ui|i = 1, · · · ,M},
{vj|j = 1, · · · , N}, and {wk|k = 1, · · · , K}, respectively. We assume that the energy and information
transmissions are performed on orthogonal frequency bandswithout interfering with each other. Specifi-
cally, the ENs are connected to stable power source and broadcast RF energy in the DL for the WDs to
harvest the energy and store in their rechargeable batteries. At the same time, the WDs use the battery
power to transmit information to the APs in the UL. The circuit structure of a WD to perform the above
operations is also shown in Fig. 1.
In a transmission block of lengthT , theM ENs transmit simultaneously on the same bandwidth in
December 10, 2015 DRAFT

6
the DL, where each ENi transmits
xi(t) =√
P0si(t), t ∈ [0, T ] , i = 1, · · · ,M. (1)
Here,P0 denotes the transmit power,si(t) denotes the pseudo-random energy signal used by thei-th EN,
which is assumed to be of unit power (Et [|si(t)|2] = 1) and independent among the ENs (Et [si(t)sj(t)] =
0 if i 6= j). The reason to use random signal instead of a single sinusoid tone is to avoid peak in transmit
power spectrum density, for satisfying the equivalent isotropically radiated power (EIRP) requirement
enforced by spectrum regulating authorities [1]. Notice that the energy beamforming technique proposed
in [4] is not used in our setup, as it requires accurate CSI andDL symbol-level synchronization, which
may be costly to implement in a highly distributed WPCN network considered in this work.
Accordingly, the received energy signal by thek-th WD is
yk(t) =√
P0
∑Mi=1αi,ksi(t), k = 1, · · · , K, (2)
whereαi,k denotes the equivalent baseband channel coefficient from the i-th EN to thek-th WD, which is
assumed to be constant within a transmission block but may vary independently across different blocks.
Let hi,k , |αi,k|2 denote the channel power gain, which follows a general distribution with its mean
determined by the distance between the EN and WD, i.e.,
E [hi,k] = β||ui −wk||−dD , i = 1, · · · ,M, k = 1, · · ·K, (3)
where dD ≥ 2 denotes the path loss exponent in DL,|| · || denotes thel2-norm operator, andβ ,
Ad
(
3·108
4πfd
)dDwith Ad andfd denoting the downlink antenna power gain and carrier frequency, respectively
[20]. Then, each WDk can harvest an average amount of energy from the energy transmission within
each block given by [3]
Qk = ηTE[
|yk(t)|2| {hi,k}]
= ηTP0
(
∑Mi=1hi,k
)
, k = 1, · · · , K, (4)
where η ∈ (0, 1] denotes the energy harvesting circuit efficiency, and the expectation is taken over
the pseudo-random energy signal variations under fixedhi,k’s within the transmission block. Letλk ,
E [Qk] /T denote the average energy harvesting rate over the variation of wireless channels (hi,k’s) in
different transmission blocks, we have
λk = ηβP0 ·∑M
i=1||ui −wk||−dD , k = 1, · · · , K. (5)
In the UL information transmissions, we assume that each WD transmits data to only one of the APs.
December 10, 2015 DRAFT

7
To make the placement problem tractable, the WD-AP associations are assumed to be fixed, where each
WD k transmits to its nearest APjk regardless of the instantaneous CSI, i.e.,
jk = arg minj=1,··· ,N
||vj −wk||, k = 1 · · · , K. (6)
Here, we assume no co-channel interference for the receiveduser signals from different WDs, e.g., the
WDs transmit on orthogonal channels. Besides, for the simplicity of analysis, we assume no limit on the
maximum number of WDs that an AP could receive data from. Then, the average power consumption
rate for WDk is modeled as
µk = a1,k + Ek , a1,k + a2,k||vjk −wk||dU , k = 1, · · · , K, (7)
where a1,k denotes the constant circuit power of WDk, Ek denotes the average transmit power as a
function of the distance between WDk and its associated APjk, anddU ≥ 2 denotes the UL channel
path loss exponent. Besides,a2,k > 0 denotes a parameter related to the transmission strategy used in
the UL communication.2 In general, the model in (7) indicates that the transmit power increases as a
polynomial function of the distance between the transmitter and receiver to satisfy certain communication
quality requirement, e.g., minimum data rate or maximum allowed outage probability, which is widely
used for wireless network performance analysis [21], [22].
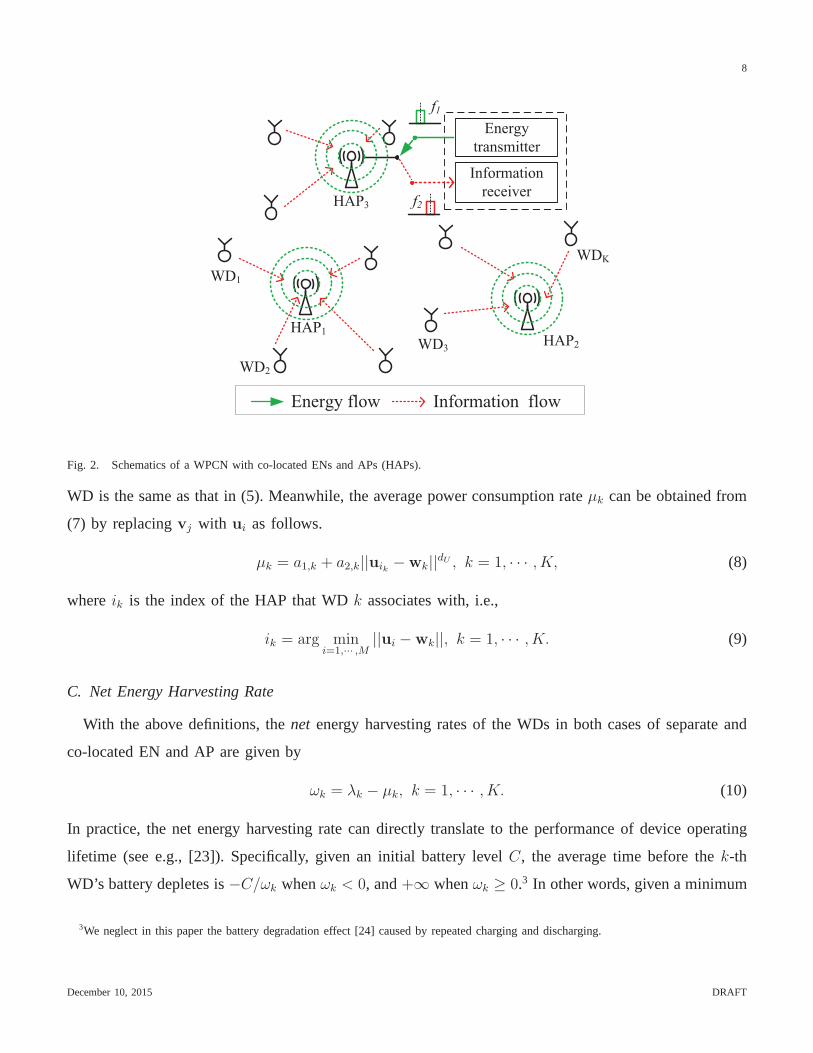
B. Co-located ENs and APs
A special case of the WPCN that we consider in Fig. 1 is when theENs and APs are grouped into
pairs and each pair of EN and AP are co-located and integratedas a hybrid access point (HAP), which
corresponds to settingM = N and ui = vi for i = 1, · · · ,M . With the network model and HAP’s
circuit structure shown in Fig. 2, a HAP transfers RF power inthe DL and receives information in the
UL simultaneously on different frequency bands. Although the use of HAPs is less flexible in placing
the ENs and APs than with separated ENs and APs, the overall deployment cost is reduced, because the
production and operation cost of a HAP is in general less thanthe sum-cost of two separate EN and AP.
For brevity, we reuse the notationui, i = 1, · · · ,M , to denote the location coordinates of theM HAPs.
Given other parameters unchanged, the expression of the average energy harvesting rateλk of the k-th
2For example, given a receive signal power requirementΓk to achieve a target data rate and maximum allowed outage portability ψk forWD k, we havea2,k = Γk
Au
(
4πfu3·108
)dUE1
(
ln(
11−ψk
))
when truncated channel inverse transmission [20] is used under Rayleigh fading
channel, whereAu and fu denote the uplink antenna gain and carrier frequency, respectively, andE1(x) ,∫
∞
11t· e−tx dt denotes the
exponential integral function.
December 10, 2015 DRAFT
8
HAP1HAP2
HAP3
WD1
WD2
WDK
WD3
Energy
transmitter
Information
receiver
f1
f2
Energy flow Information flow
Fig. 2. Schematics of a WPCN with co-located ENs and APs (HAPs).
WD is the same as that in (5). Meanwhile, the average power consumption rateµk can be obtained from
(7) by replacingvj with ui as follows.
µk = a1,k + a2,k||uik −wk||dU , k = 1, · · · , K, (8)
whereik is the index of the HAP that WDk associates with, i.e.,
ik = arg mini=1,··· ,M
||ui −wk||, k = 1, · · · , K. (9)
C. Net Energy Harvesting Rate
With the above definitions, thenet energy harvesting rates of the WDs in both cases of separate and
co-located EN and AP are given by
ωk = λk − µk, k = 1, · · · , K. (10)
In practice, the net energy harvesting rate can directly translate to the performance of device operating
lifetime (see e.g., [23]). Specifically, given an initial battery levelC, the average time before thek-th
WD’s battery depletes is−C/ωk whenωk < 0, and+∞ whenωk ≥ 0.3 In other words, given a minimum
3We neglect in this paper the battery degradation effect [24]caused by repeated charging and discharging.
December 10, 2015 DRAFT

9
device operating lifetime requirementTk > 0, it must satisfyωk ≥ −C/Tk if Tk < ∞, andωk ≥ 0 if
Tk = ∞.
III. PROBLEM FORMULATION
In this paper, we assume that the locations of the WDs are known and study the optimal placement
of ENs and information APs, which are either separated or co-located in their locations. This may
correspond to a sensor network with sensor (WD) locations predetermined by the sensed objects, or an
IoT network with static WDs. In particular, we are interested in minimizing the deployment cost given
that the net energy harvesting rates of all the WDs are largerthan a common prescribed valueγ, i.e.,
ωk ≥ γ, k = 1 · · · , K, whereγ is set to achieve a desired device operating lifetime.
A. Separated ENs and APs
When the ENs and APs are separated, the total deployment costis c1M + c2N if M ENs andN APs
are used, wherec1 and c2 are the monetary costs of deploying an EN and an AP, respectively. To solve
the minimum-cost deployment problem, let us first consider the following feasibility problem:
Find UM = [u1, · · · ,uM ] , V
N = [v1, · · · ,vN ] (11a)
s. t. λk
(
UM)
− µk
(
VN)
≥ γ, k = 1, · · · , K, (11b)
bl ≤ ui ≤ b
h, i = 1, · · · ,M, (11c)
bl ≤ vj ≤ b
h, j = 1, · · · , N, (11d)
whereλk andµk are functions ofUM andVN given in (5) and (7), respectively. The inequalities in (11c)
and (11d) denote element-wise relations. Besides,{
bl,bh
}
specifies a feasible deployment area for both
the ENs and APs inR2, which is large enough to contain all the WDs, i.e.,bl ≤ wk ≤ b
h, k = 1 · · · , K.
Evidently, if (11) can be efficiently solved for anyM andN , then the optimal node placement solution
to the considered minimum-cost deployment problem can be easily obtained through a simple two-
dimension search over the values ofM andN , i.e., finding a pair of feasible(M,N) that produces the
lowest deployment costc1M + c2N .
For a pair of fixedM andN (M > 0 andN > 0), we can see that (11) is feasible if and only if the
December 10, 2015 DRAFT

10
optimal objective of the following problem is no smaller than γ, i.e.,
maxUM ,VN
mink=1,··· ,K
{
λk
(
UM)
− µk
(
VN)}
(12a)
s. t. bl ≤ ui ≤ b
h, i = 1, · · · ,M, (12b)
bl ≤ vj ≤ b
h, j = 1, · · · , N. (12c)
We can express (12) as its equivalent epigraphic form [27], i.e.,
maxt,UM ,VN
t
s. t. λk
(
UM)
− µk
(
VN)
≥ t, k = 1, · · · , K,
bl ≤ ui ≤ b
h, i = 1, · · · ,M,
bl ≤ vj ≤ b
h, j = 1, · · · , N.
(13)
Given fixedM andN , (11) is feasible if and only if the optimal objective of (13)satisfiest∗ ≥ γ. Then,
the key difficulty of solving the optimal deployment problemis to find efficient solution for problem
(13).
B. Co-located ENs and APs
When the ENs and APs are integrated as HAPs, the total deployment cost isc3M if M HAPs are
used. Here,c3 denotes the cost of deploying a HAP, where in generalc3 < c1 + c2. Similar to the case
of separated ENs and APs, the minimum-cost placement problem can be equivalently formulated as the
following feasibility problem for any fixed number ofM > 0 HAPs,
Find UM = [u1, · · · ,uM ]
s. t. λk
(
UM)
− µk
(
UM)
≥ γ, k = 1, · · · , K,
bl ≤ ui ≤ b
h, i = 1, · · · ,M,
(14)
whereλk
(
UM)
andµk
(
UM)
are given in (5) and (8), respectively. Notice that the studyon co-located
ENs and APs is not a special case of that of separated ENs and APs. In fact, it adds extra constraints
(ui = vi, i = 1, · · · ,M) to (11), which leave less flexibility to the nodes placementdesign and make
the problem more challenging to solve. Equivalently, the feasibility of (14) can be determined by solving
December 10, 2015 DRAFT

11
the following optimization problem
maxt,UM
t
s. t. λk
(
UM)
− µk
(
UM)
≥ t, k = 1, · · · , K,
bl ≤ ui ≤ b
h, i = 1, · · · ,M,
(15)
and then comparing the optimal objectivet∗ with γ, to see whethert∗ ≥ γ holds. In the following
Sections IV and V, we propose efficient algorithms to solve problems (13) and (15), respectively. It is
worth mentioning that the placement solution to (13) and (15) can be at arbitrary locations. When an
EN (or a HAP) is placed at a location very close to an WD, the far-field channel model in (3) may
be inaccurate. However, we learn from (13) and (15) that the optimal value t∗ is determined by the
performance-bottleneck WD that is far away from the ENs and APs (i.e., the channel model in (3)
applies practically), thus having very low energy harvesting rate and high transmit power consumption.
Therefore, the potential inaccuracy of (3) will not affect the objective values of (13) and (15), and the
proposed algorithms in this paper are valid in practice.
IV. PLACEMENT OPTIMIZATION OF SEPARATED ENS AND APS
In this section, we study the node placement optimization for separately located EN and AP in problem
(13). Specifically, we first study in Section IV.A the method to optimize EN placement assuming that
the locations of APs are fixed in a WPCN. In Section IV.B, we further study the method to optimize the
placement of APs given fixed EN locations. Based on the obtained results, we then propose in Section
IV.C an alternating method to jointly optimize the placements of ENs and APs. In addition, an alternative
local searching method is considered in Section IV.D for performance comparison.
A. EN Placement Optimization with Fixed AP Location
We first consider the optimal EN placement problem when the locations of the APs are fixed, i.e.,
vj ’s are known. In this case, the WD-AP associationjk is known for each WDk from (6), andµk’s can
be calculated accordingly from (7). It is worth mentioning that the proposed algorithms under the fixed
AP setup can be directly extended to solve EN placement problem in other wireless powered networks
not necessarily for communication purpose, e.g., a sensor network whose energy is mainly consumed on
sensing and processing data, as long as the energy consumption ratesµk’s are known parameters. With
December 10, 2015 DRAFT

12
vj ’s andµk’s being fixed, we can rewrite (13) as
maxt,UM
t
s. t. ϕ ·∑Mi=1||ui −wk||−dD − µk ≥ t, k = 1, · · · , K,
bl ≤ ui ≤ b
h, i = 1, · · · ,M,
(16)
whereϕ , ηβP0. We can see that (16) is a non-convex optimization problem, because||ui −wk||−dD is
neither a convex nor concave function inui. As it currently lacks of effective method to convert (16) into
a convex optimization problem, the optimal solution is in general hard to obtain. However, for a special
case withM = 1, i.e., placing only one EN, the optimal solution is obtainedin the following. By setting
M = 1, (16) can be rewritten as
maxt,u1
t (17a)
s. t. ||u1 −wk||dD ≤ ϕ
t+ µk, k = 1, · · · , K, (17b)
bl ≤ u1 ≤ b
h. (17c)
Although (17) is still a non-convex optimization problem (as ϕ/(t+ µk) is not a concave function int),
it is indeed a convex feasibility problem overu1 when t is fixed, which can be efficiently solved using
the interior point method [27]. Therefore, the optimal solution of (17) can be obtained using a bi-section
search method overt, whose pseudo-code is given in Algorithm 1. Notice that the right hand side (RHS)
of (17b) is always positive during the bisection search overt ∈ (LB1, UB1). Besides, we can infer
that Algorithm 1 converges to the optimal solutiont∗, because problem (17) is feasible fort ≤ t∗ and
infeasible otherwise. The total number of feasibility tests performed islog2 [(UB1 − LB1) /σ1], where
σ1 is a predetermined parameter corresponding to a solution precision requirement.
Since placing one EN optimally is solved, we have the potential to decouple the difficult EN placement
problem (16) intoM relatively easy problems withM > 1. This motivates a greedy algorithm, which
places the ENs iteratively one-by-one into the network. Intuitively, an optimal deployment solution of
(16) should “spread” theM ENs among theK WDs to maximize the minimum energy harvesting rate.
However, the optimal solution obtained from solving (17) tends to place the single EN around the center
of the cluster formed by theK WDs. Inspired by the optimal solution structures of (16) and(17), we
propose in the following a cluster-based greedy EN placement method, where the newly placed EN
optimizes the net energy harvesting rates of an expanding cluster of WDs, until all the WDs are included.
December 10, 2015 DRAFT

13
Algorithm 1: Bi-section search for single EN placement.input : WD locationswk ’s, power consumption ratesµk ’soutput: the optimal location of the ENu∗
1
1 Initialize: LB1 ← −maxk=1,··· ,K µk, UB1 ← P0;2 repeat3 t← (UB1 + LB1)/2;4 if Problem (17) is feasible givent then5 LB1 ← t;6 u1 ← a feasible solution of (17) givent;7 else8 UB1 ← t;9 end
10 until |UB1 − LB1| < σ1;11 Return u
∗ ← the last feasible solutionu1;
In practice, we geographically partition theK WDs intoM non-overlapping clusters (assumingK ≥M), denoted by{Wi|i = 1, · · · ,M}.4 This can be efficiently achieved by, e.g., the well-knownK-means
clustering algorithm [25]. Then, in thei-th iteration (i ≥ 1), we obtain the optimal location of thei-th
EN, denoted byu∗
i , by maximizing the net energy harvesting rates of the WDs in the first i clusters as
follows.
maxti,ui
ti (18a)
s. t. (ti + µk − λi−1,k) · ||ui −wk||dD ≤ ϕ,
k ∈ {W1 ∪ · · · ∪Wi} , (18b)
bl ≤ ui ≤ b
h, (18c)
whereλi−1,k denotes the accumulative RF power harvested at thek-th WD due to the(i− 1) previously
deployed ENs, given by
λi−1,k =
0, i = 1,
ϕ · ∑i−1j=1||u∗
j −wk||−dD , i > 1.(19)
In each iteration,u∗
i can be efficiently obtained using a bi-section search methodover ti similar to that
in solving (17). The pseudo-code of the greedy algorithm is given in Algorithm 2. Notice in line8 of
Algorithm 2, the corresponding inequality in (18b) holds automatically whenti + µk − Qi−1,k < 0 for
somek, given a fixedti ∈ (LB2, UB2). Therefore, the corresponding constraints can be safely ignored
without affecting the feasibility of (18).
4The proposed node placement algorithms can apply to any clustering method used. Besides, the algorithm complexity is not related tothe clustering method as long as the partitions of the WDs aregiven. For simplicity, we useK-means clustering algorithm in this paper.
December 10, 2015 DRAFT

14
AP3
AP1
AP4
AP2
AP3
AP1
AP2EN1
AP3
AP1
AP4
AP2EN1
EN2
AP3
AP1
AP4
AP2EN1
EN2
EN3
(a) (b)
(c) (d)
AP4
WDs not considered in the current EN deployment
WDs considered in the current EN deployment
the EN currently being deployed
ENs already deployed
Fig. 3. Illustration of greedy algorithm for placingM = 3 ENs (with fixed APs).
The greedy EN placement method is illustrated in Fig. 3. In this example, we first divide the WDs
into M = 3 clusters in Fig. 3(a), then place the3 ENs one-by-one in Fig. 3(b)-(d). When placing the
1st EN or EN1, the algorithm only considers the received energy of the WDsin the 1st cluster (shaded
WDs in Fig. 3(b)) from the EN to be placed; for the2nd EN or EN2, it considers the received energy
of the WDs in the1st and2nd clusters from the first2 ENs; for the last EN or EN3, it considers the
received energy of all the WDs from the3 ENs. Notice that our greedy algorithm allows multiple ENs
to be placed in the same cluster, because the placement of thei-th EN considers all the WDs in the first
i clusters.
Algorithm 2 applies Algorithm 1M times, one for placing each EN, thus the total number of
feasibility tests performed isM log2 [(UB2 − LB2) /σ2], whereσ2 is a parameter corresponding to a
solution precision requirement. Besides, the time complexity of solving each convex feasibility test using
the interior point method isO(√
K + 2M log (K + 2M))
[27]. Therefore, the overall time complexity
of Algorithm 2 is O(
M√K + 2M log (K + 2M)
)
, which is moderate even for a large-size network
consisting of, e.g., tens of ENs and hundreds of WDs.
December 10, 2015 DRAFT

15
Algorithm 2: Greedy algorithm forM EN placement.input : WD locationswk ’s, N AP locationsvj ’s;output: locations ofM ENs {u∗
1, · · · ,u∗
M};1 Initialization: Clustering the WDs into{Wi, i = 1, · · · ,M} ;2 With vj ’s, calculateµk ’s using (6) and (7);3 for i = 1 to M do4 LB2 ← −maxk=1,··· ,K µk, UB2 ←MP0 ;5 Update
{
Qi−1,k, k = 1 · · · ,K}
using (19);6 repeat7 ti ← (UB2 + LB2)/2;8 Ignore the constraints in (18b) withti + µk − Qi−1,k < 0;9 if Problem (18) is feasible giventi then
10 LB2 ← ti;11 u
∗
i ← a feasible solution of (18);12 else13 UB2 ← ti;14 end15 until |UB2 − LB2| < σ2;16 end17 Return {u∗
1, · · · ,u∗
M}
B. AP Placement Optimization under Fixed ENs
We then study in this subsection the method to optimize the placement of APs given fixed EN locations,
i.e., ui’s are known. In this case,λk’s are fixed and can be calculated using (5). Withλk’s being fixed
parameters, we can substitute (7) into (13) and formulate the optimal AP placement problem under fixed
ENs as followsmaxt,VN
t
s. t. λk − a1,k − a2,k||vjk −wk||dU ≥ t, k = 1, · · · , K,
bl ≤ vj ≤ b
h, j = 1, · · · , N,
(20)
wherejk is the index of AP that WDk associates with given in (6). The above problem is non-convex
because of the combinatorial nature of WD-AP associations,i.e., jk’s are discrete indicators. However,
notice that ifjk’s are known, (20) is a convex problem that is easily solvable. In practice, however,jk’s
are revealed only after (20) is solved and the placement of APs is obtained. To resolve this conflict, we
propose in the following atrial-and-error method to find feasiblejk’s and accordingly a feasible AP
placement solution to (20). The pseudo-code of the method tosolve (20) is presented in Algorithm 3 and
explained as follows.
As its name suggests, we first convert (20) into a convex problem by assuming a set of WD-AP
associations, denoted byj(b)k , k = 1, · · · , K, and then solve (20) for the optimal AP placement based on
the assumedj(b)k ’s. Next, we comparej(b)k ’s with the actual WD-AP associations after the optimal AP
December 10, 2015 DRAFT

16
placement is obtained using (6), denoted byj(a)k , k = 1, · · · , K. Specifically, we check ifj(a)k = j
(b)k , ∀k.
If yes, we have obtained a feasible solution to (20); otherwise, we updatej(b)k = j(a)k , k = 1, · · · , K
and repeat the above process untilj(a)k = j
(b)k , ∀k. The convergence of Algorithm 3 is proved in the
Appendix and the convergence rate is evaluated numericallyin Fig. 6 of Section VI. Intuitively, the
trial-and-error method is convergent because the optimal value of (20) is bounded, while by updating
j(b)k = j
(a)k , we can always improve the optimal objective value of (20) inthe next round of solving it.
As we will show later in Fig. 6 of Section VI, the number of iterations used until convergence is of
constant order, i.e.,O(1), regardless of the value ofN or K. There, the time complexity of Algorithm
3 is O(√
K + 2N log (K + 2N))
, as it takes this time complexity for solving (20) in each iteration.
Algorithm 3: Trial-and-error method forN AP placementinput : K WD locationswk ’s, M EN locationsui’s;output: locations ofN APs, i.e.,{v∗
1 , · · · ,v∗
N};1 Initialization:2 Separate the WDs intoN clusters, and place each AP at a cluster center. Usev
(0)j ’s to denote the initial AP locations;
3 With v(0)j ’s, calculatej(b)k ’s using (6);
4 With ui’s, calculateλk ’s using (5). Letflag ← 1;5 while flag = 1 do6 Given j(b)k ’s, solve (20) for optimal AP placementv∗
j ’s;7 Given v
∗
j ’s, calculatej(a)k ’s using (6);8 if j(a)k 6= j
(b)k for somek then
9 Updatej(b)k = j(a)k , k = 1, · · · ,K;
10 else11 A local optimum is found, return{v∗
1 , · · · ,v∗
N};12 flag ← 0;13 end14 end
C. Joint EN and AP Placement Optimization
In this subsection, we further study the problem of joint EN and AP placement optimization. In this
case, we consider both the locations of ENs and APs as variables, such that the joint EN-AP placement
December 10, 2015 DRAFT

17
problem in (13) can be expressed as
maxt,UM ,VN
t
s. t. ϕ ·∑Mi=1||ui −wk||−dD − a2,k||vjk −wk||dU
≥ t + a1,k, k = 1, · · · , K,
bl ≤ ui ≤ b
h, i = 1, · · · ,M
bl ≤ vj ≤ b
h, j = 1, · · · , N.
(21)
Evidently, the optimization problem is highly non-convex because of the non-convex function||ui −wk||−dD and the discrete variablesjk’s. Based on the results in Section IV.A and IV.B, we propose an alter-
nating method in Algorithm 4 to solve (21) for joint EN and AP placement solution. Specifically, starting
with a feasible AP placement, we alternately apply Algorithms 2 and 3 to iteratively update the locations
of ENs and APs, respectively. A point to notice is that Algorithm 2 (and Algorithm 3) only produces a
sub-optimal solution to (16) (and (20)), thus the objectivevalue of (21) may decrease during the alternating
iterations. To cope with this problem, we record the deployment solutions obtained inL > 1 iterations and
select the one with the best performance. The impact of the parameterL to the algorithm performance is
evaluated in Fig. 5 of Section VI. Given the complexities of Algorithms 2 and 3, we can easily infer that
the time complexity of Algorithm 4 isO(
LM√K + 2M log (K + 2M) + L
√K + 2N log (K + 2N)
)
.
Algorithm 4: An alternating method for joint AP-EN placement.input : K WD locationswk ’s, L iterations;output: Locations ofM ENs andN APs, i.e.,ui’s andvj ’s.;
1 Initialize: Separate the WDs intoN clusters, and place each AP at a cluster center. Usevj ’s to denote the initial AP locations;2 for l = 1 to L do3 if l is odd then4 Given vj ’s, solve (21) forui’s using Algorithm 2;5 else6 Givenui’s, solve (21) forvj ’s using Algorithm 3;7 end8 zl ← mink=1,··· ,K (λk − µk), whereλk andµk are in (5) and (7), respectively.;9 u
(l)i ← ui, i = 1, · · · ,M , andv(l)
j ← vj , j = 1, · · · , N .10 end11 p← argmaxl=1,··· ,L zl;12 Return: u(p)
i ’s andv(p)j ’s.
D. Alternative Method
Besides the proposed alternating method for solving (21), we also consider an alternative local searching
method used as benchmark algorithm for performance comparison. The local searching algorithm starts
December 10, 2015 DRAFT

18
with a random deployment of theM ENs andN APs, i.e.,ui’s andvi’s, and checks if the minimum net
energy harvesting rate among the WDs, i.e.,
Pr , mink=1,··· ,K
(
ϕ ·∑Mi=1||ui −wk||−dD − a1,k − a2,k min
j=1,··· ,N||vj −wk||dU
)
(22)
can be increased by making a random movement toui’s and vj ’s that satisfy{
ui, vj, i = 1, · · · ,M, j = 1, · · · , N,
∣
∣
∣
∣
∑Mi=1||ui − ui||2 +
∑Nj=1||vj − vj||2 < σ3
}
, (23)
whereσ3 is a fixed positive parameter. If yes, it makes the move and repeats the random movement
process. Otherwise, ifPr cannot be increased, the algorithm has reached a local maximum and returns the
current placement solution. Several off-the-shelf local searching algorithms are available, where simulated
annealing [26] is used in this paper. In particular, simulated annealing can improve the searching result
by allowing the nodes to be moved to locations with decreasedvalue ofPr to reduce the chance of being
trapped at local maximums. Besides, we can improve the quality of deployment solution using different
initial node placements, which are obtained either randomly or empirically, and select the resulted solution
with the best performance.
V. PLACEMENT OPTIMIZATION OF CO-LOCATED ENS AND APS
In this section, we proceed to study the node placement optimization problem (15) for the case of
co-located ENs and APs. The problem is still non-convex due to which the optimal solution is hard to be
obtained. Inspired by both Algorithms 2 and 3, we propose in this section an efficient greedy algorithm
for HAP placement optimization.
A. Greedy Algorithm Design
The node placement optimization problem (15) is highly non-convex, because the expression of problem
(15) involves non-convex function||ui−wk||−dD in λk
(
UM)
and minimum operator over convex functions
in µk
(
UM)
. Since its optimal solution is hard to obtain, a promising alternative is the greedy algorithm,
which iteratively places a single HAP to the network at one time, similar to Algorithm 2 for solving
(16) which optimizes the EN locations given fixed APs. However, by comparing problems (15) and (16),
we can see that the algorithm design for solving (15) is more complicated, because eachµk is now a
function ofui’s, instead of constant parameter in (16).
Similar to the greedy algorithm in Section IV.A, we first separate theK WDs intoM non-overlapping
clusters, denoted by{Wi|i = 1, · · · ,M}, and add to the network a HAP in each iteration. Specifically,
December 10, 2015 DRAFT

19
in the i-th iteration, given that the previous(i − 1) HAPs are fixed, we obtain the optimal location of
the i-th HAP, denoted byu∗
i , by maximizing the net energy harvesting rates of the WDs in the first i
clusters. To simplify the notations, we also useλi−1,k as in Section IV.A to denote the accumulative RF
harvesting power of the WDk from the previously placed(i− 1) HAPs, which can be calculated using
(19). Besides, letµi−1,k denote the energy consumption rate of thek-th WD after the first(i− 1) HAPs
have been placed, where
µi−1,k =
+∞, i = 1,
a1,k + a2,k minj=1,··· ,i−1 ||u∗
j −wk||dU , i > 1.(24)
Notice that the only difference between placing thei-th HAP and thei-th EN in Section IV.A is thatµk
is now a function ofui instead of a given constant. By substituting (24) into (18),the optimal location
of the i-th HAP is obtained by solving the following problem
maxti,ui
ti (25a)
s. t. (ti + µi,k − λi−1,k) · ||ui −wk||dD ≤ ϕ,
k ∈ {W1 ∪ · · · ∪ Wi} , (25b)
ul ≤ ui ≤ u
h, (25c)
where
µi,k = min(
µi−1,k, a1,k + a2,k||ui −wk||dU)
. (26)
From (26), we can see that a WD may change its association to the i-th HAP, if the newly placed HAP is
closer to the WD than all the other(i−1) HAPs that have been previously deployed. This combinatorial
nature of WD-AP associations makes problem (25) non-convexeven if ti is fixed. In the following, we
apply the similar trial-and-error technique as that in Section IV.B to obtain a feasible solution to problem
(25).
B. Solution to Problem (25)
The basic idea to obtain a feasible solution of (25) is to convert it into a convex problem giventi,
and then use simple bi-section search overti. The convexification of (25) is achieved by a trial-and-error
method similar to that used for finding feasible WD-AP associations proposed in Algorithm 3. That is, we
iteratively make assumptions on WD-AP associations and update the optimal placement of thei-th HAP
obtained from solving (25) based on the assumptions in the current iteration. With a bit abuse of notations,
December 10, 2015 DRAFT

20
here we reuseu∗
i in each iteration as the optimal location of thei-th HAP given the current WD-AP
association assumptions. Specifically, we assume whether the WDs change their associations after thei-th
HAP is added, i.e., assuming eitherµi−1,k < a1,k + a2,k||u∗
i −wk||dU or µi−1,k ≥ a1,k + a2,k||u∗
i −wk||dU
for eachk. Then, given a fixedti, each constraint onk in (25b) belongs to one of the following four
cases:
1) Case1: If we assume that WDk does not change its WD-HAP association after thei-th HAP is
placed into the WPCN, or equivalentlyµi−1,k < a1,k+a2,k||u∗
i −wk||dU , we can replace the corresponding
constraint in (25b) with
(ti + µi−1,k − λi−1,k) · ||ui −wk||dD ≤ ϕ. (27)
With a fixed ti, (27) is a convex constraint ifti + µi−1,k − λi−1,k > 0.
2) Case2: If we still assumeµi−1,k < a1,k + a2,k||u∗
i −wk||dU , while ti + µi−1,k − λi−1,k ≤ 0 holds,
we can safely drop the constraint in (25b) without changing the feasible region ofui.
3) Case3: On the other occasion, if we assume that WDk changes its WD-HAP association, or
µi−1,k ≥ a1,k + a2,k||u∗
i −wk||dU , the corresponding constraint in (25b) becomes
(
ti + a1,k + a2,k||ui −wk||dU − λi−1,k
)
· ||ui −wk||dD ≤ ϕ, (28)
which can be further expressed as
||ui −wk||dU+dD +ti + a1,k − λi−1,k
a2,k||ui −wk||dD − ϕ
a2,k≤ 0. (29)
Notice that, given a fixedti, (29) is a convex constraint ifti + a1,k − λi−1,k ≥ 0.
4) Case4: Otherwise, if we assumeµi−1,k ≥ a1,k + a2,k||u∗
i − wk||dU and ti + a1,k − λi−1,k < 0
holds, (29) is a non-convex constraint, as the left-hand-side (LHS) of (29) is the difference of two convex
functions. Nonetheless, we show that (29) can still be converted into a convex constraint in this case. Let
us first consider a function
z(x) = xdU+dD +ti + a1,k − λi−1,k
a2,kxdD − ϕ
a2,k, (30)
wherex ≥ 0 and ti + a1,k − λi−1,k < 0. We calculate the first order derivative ofz(x) and find thatz
increases monotonically when
x >
[− (ti + a1,k − λi−1,k) dDa2,k (dU + dD)
]1/dU
, τi,k, (31)
and decreases monotonically ifx ≤ τi,k. Notice thatτi,k > 0 andz(0) = − ϕa2,k
< 0 always hold. Therefore,
althoughz(x) is not a convex function,z(x) < 0 can still be equivalently expressed asx < θi,k, with θi,k
December 10, 2015 DRAFT

21
being some positive number satisfyingz(θi,k) = 0. The value ofθi,k can be efficiently obtained using
many off-the-shelf numerical methods, such as the classic Newton’s method or bi-section search method.
A close comparison between the LHS of (29) andz(x) in (30) shows that, by lettingx , ||ui − wk||,we can equivalently express (29) as a convex constraint
||ui −wk|| ≤ θi,k, (32)
when ti + a1,k − λi−1,k < 0 holds.
To sum up, given a fixedti, we tackle thek-th constraint in (25b) using one of the following methods:
1) Replace by (27) if assumingµi−1,k < a1,k + a2,k||u∗
i −wk||dU and ti + µi−1,k − λi−1,k > 0;
2) Drop the constraint if assumingµi−1,k < a1,k + a2,k||u∗
i −wk||dU and ti + µi−1,k − λi−1,k ≤ 0;
3) Replace by (29) if assumingµi−1,k ≥ a1,k + a2,k||u∗
i −wk||dU and ti + a1,k − λi−1,k ≥ 0;
4) Replace by (32) if assumingµi−1,k ≥ a1,k + a2,k||u∗
i −wk||dU and ti + a1,k − λi−1,k < 0.
After processing all theK constraints in (25b), we can convert (25) into a convex feasibility problem given
a set of WD-HAP association assumptions and a fixedti. Accordingly, the optimal placement of thei-th
HAP (u∗
i ) under the assumptions, can be efficiently obtained from solving (25) using a bi-section search
method overti. Similar to the trial-and-error technique used in Algorithm 3, we check if the obtained
u∗
i satisfies all the assumptions made. If yes, we have obtained afeasible solution of (25). Otherwise,
we switch the violating assumptions, then follow the above constraint processing method to resolve (25)
for a newu∗
i , and repeat the iterations until all the assumptions are satisfied. The above trial-and-error
method converges. The proof follows the similar argument asgiven in the Appendix, which proves the
convergence of the trial-and-error method used for solvingproblem (20). Thus, this proof is omitted here.
C. Overall Algorithm
Since the placement of a single HAP can be obtained via solving (25), we can iteratively place theM
HAPs into the WPCN. The pseudo-code of the revised greedy algorithm is presented in Algorithm 5. For
example, Fig. 4 illustrates the detailed steps taken to place the2nd HAP, or HAP2 (total 3 HAPs while
the first HAP, or HAP1 is already placed). Specifically, we first assume in Fig. 4(a)that all the WDs in
the 1st cluster associate with HAP1, and the WDs in the2nd cluster associate with HAP2, after HAP2 is
added into the network. Then, we obtain in Fig. 4(b) the optimal placement of the HAP2 based on the
association assumptions made. However, the obtained location of HAP2 results in a contradiction with
the association assumption made on WD1 (assumed to be associated with HAP1). Therefore, we change
December 10, 2015 DRAFT

22
HAP1
(a) (b)
(d)
Assumed WD-to-HAP association
Optimal HAP location under association assumption
HAP1
(c)
HAP2
Contradicting
assumption
HAP1
Change
association
assumption
Association
assumptions
New
assumptions
HAP1
All
assumptions
valid
Placement
solution for
HAP2
HAP2
HAP2
HAP2
Actual WD-to-HAP association
WD1 WD1
WD1WD1
HAP location before optimization
Fig. 4. Illustration of greedy algorithm for placement optimization with co-located EN and AP (HAP).
the association assumption of WD1 to HAP2, and recalculate the optimal placement solution for HAP2
(Fig. 4(c)). In Fig. 4(d), the newly obtained location of HAP2 satisfies all the association assumptions,
thus the placement of HAP2 is feasible. Following the similar argument in the Appendix, the association
assumption update procedure converges, because the optimal objective value of (25) is non-decreasing
upon each association assumptions update (lines10−27 of Algorithm 5). After obtaining the location of
HAP2, a feasible location of the3rd HAP, HAP3, can also be obtained using the similar procedures as
above. Besides, we can infer that the time complexity of Algorithm 5 isO(
M√K + 2M log (K + 2M)
)
,
because it places theM HAPs iteratively, while the trial-and-error method used toplace each HAP needs
O(√
K + 2M log (K + 2M))
complexity.
VI. SIMULATION RESULTS
In this section, we use simulations to evaluate the performance of the proposed node placement methods.
All the computations are executed by MATLAB on a computer with an Intel Core i52.90-GHz CPU and
4 GB of memory. The carrier frequency is915 MHz for both DL and UL transmissions operating on
different bandwidths. In the DL energy transmission, we consider using Powercast TX91501-1W power
December 10, 2015 DRAFT

23
Algorithm 5: Greedy algorithm for HAP placement optimization.input : K WD locationswk ’soutput: locations ofM HAPs {u∗
1, · · · ,u∗
M}1 Cluster the WDs into{Wi, i = 1, · · · ,M};2 for i = 1 to M do3 for each WDk do4 Updateλi−1,k andµi−1,k using (19) and (24);5 Assume WDk satisfies condition(a) or (b):6 (a) µi−1,k < a1,k + a2,k||u
∗
i −wk||dU ;
7 (b) µi−1,k ≥ a1,k + a2,k||u∗
i −wk||dU .
8 end9 StopF lag ← 0;
10 repeat11 LB ← −δ, UB ← δ, δ is sufficiently large;12 repeat13 ti ← (UB + LB)/2;14 Given ti, convert (25) into a convex problem using the procedures in Section V.B;15 if Problem (25) is feasible giventi then16 LB ← ti; u∗
i ← a feasible solution of (25);17 else18 UB ← ti;19 end20 until |UB − LB| < σ, σ is sufficiently small;21 if all theK assumptions are validthen22 StopF lag ← 1; the i-th HAP location← u
∗
i ;23 else24 StopF lag ← 0;25 For each WD violating the assumption, switch the assumptionfrom (a) to (b), or (b) to (a);26 end27 until StopF lag = 1;28 end29 Return the HAP locations{u∗
1, · · · ,u∗
M}.
transmitter withP0 = 1W (Watt) transmit power, and P2110 receiver withAd = 3 dB antenna gain
and η = 0.51 energy harvesting efficiency. Besides, we assume the path loss exponentdD = 2.2, thus
β = 6.57 × 10−4. In the UL information transmission, we assume thatdU = 2.5, a1,k = 50µW and
a2,k = 1.4 · 10−6 for k = 1, · · · , K, wherea2,k is obtained assuming Rayleigh fading and the use of
truncated channel inversion transmission [20] with receiver signal power−70dBm (equivalent to18dB
SNR target with -88dBm noise power) and outage probability of5%. All the WDs, ENs and APs are
placed within a24m× 24m box region specified bybl = (0, 0)T andbh = (24, 24)T . Unless otherwise
stated, each point in the following figures is an average performance of20 random WD placements, each
with K = 60 WDs uniformly placed within the box region.
A. Separated EN and AP Deployment
We first evaluate the performance of the proposed alternating optimization method (Algorithm 4) for
placing separated ENs and APs. Without loss of generality, we considerN = 6 APs and show in Fig.
December 10, 2015 DRAFT

24
4 6 8 10 12 14 16 18 20 22 24−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
No. of ENs (M)
Min
imum
net
ene
rgy
harv
estin
g ra
te (
Pr)
/mW
AltOpt (L=20)AltOpt (L=10)LSOnly EN OptimizedCC
Fig. 5. Performance comparison of the separated AP and EN placement methods (N = 6).
5 the minimum net energy harvesting ratePr in (15) achieved by Algorithm 4 when the locations of
APs are jointly optimized with those of different number of ENs (M). Evidently, a largerPr indicates
better system performance. For the proposed alternating optimization algorithm (AltOpt), we show both
the performance withL = 10 and 20. Besides, we also consider the following benchmark placement
methods
• Cluster center method (CC): separate the WDs intoM clusters and place an EN at each of the cluster
centers. Similarly, separate the WDs intoN clusters and place theN APs at the cluster centers;
• Optimize only EN locations: the APs are placed at theN cluster centers; while the EN placement
is optimized based on the AP locations using Algorithm 2.
• Local searching algorithm (LS) method introduced in Section IV, where the initial EN and AP
locations are set according to the CC method and the best-performing deployment solution obtained
during the searching iterations is used.
Evidently, we can see that the proposed alternating optimization has the best performance among the
methods considered. Specifically, significant performancegain is observed for AltOpt over optimizing
EN placement only. The LS method has relatively good performance compared to AltOpt, especially
whenM is small, but the performance gap increases withM due to the increasing probability of being
December 10, 2015 DRAFT

25
4 6 8 10 12 14 16 18 20 22 240
1
2
3
4(a) Average no. of iterations till convergence (K=60 WDs)
No. of APs (N)N
o. o
f ite
ratio
ns
40 50 60 70 80 900
1
2
3
4(b) Average no. of iterations till convergence (N=8 APs)
No. of WDs (K)
No.
of i
tera
tions
Fig. 6. The average number of WD-AP association assumptionsmade before convergence of Algorithm 3, as a function of (a)N underfixedK = 60; and (b) as a function ofK under fixedN = 8.
trapped at local maximums with a largerM . The CC scheme has the worst performance as it neglects the
disparity of energy harvesting/consumption rates among the WDs and precludes the case where multiple
AP/ENs can be placed in a cluster. In practice, Fig. 5 can be used to evaluate the deployment cost of each
algorithm. For instance, whenPr ≥ −0.1mW is required, we see that the AltOpt (L = 10) on average
needs6 ENs, the LS method needs8 ENs, optimizing EN placement only requires9 ENs, and the CC
method needs20 ENs, with the same number of information APs deployed (i.e.,N = 6). The above
results show that, when the ENs and APs are separated, significant performance gain can be obtained by
jointly optimizing the placements of ENs and APs, especially for large-size WPCNs that need a large
number of ENs and APs to be deployed. In addition, as optimizing only EN locations corresponds to
a special case of Algorithm 4 withL = 1, we can see that the performance gain is significant whenL
increases from1 to 10. However, the performance improvement becomes marginal aswe further increase
L from 10 to 20. In practice, good system performance can be obtained with relatively small number of
alternating optimizations, e.g.,L = 10 in our case.
We then show in Fig. 6 the convergence rate of Algorithm 3, forwhich the convergence is proved in
an asymptotic sense in the Appendix. In particular, we plot the average number of iterations (WD-AP
association assumptions) used until the algorithm converges. Here, we investigate the convergence rate
December 10, 2015 DRAFT

26
4 6 8 10 12 14 16 18 20 22 24
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
No. of HAPs (M)
Min
imum
net
ene
rgy
harv
estin
g ra
te (
Pr)
/mW
GreedyLSCC
Fig. 7. Performance comparison of the co-located AP and EN (HAP) placement methods.
when either the number of APs (N) or WDs (K) varies. With fixedK in Fig. 6(a), we see that the number
of iterations used till convergence does not vary significantly asN increases. Similarly in Fig. 6(b), with
a fixedN = 8, we do not observe significant increase of iterations whenK increases from40 to 90.
Besides, all the simulations performed in Fig. 6 use at most7 iterations to converge. Therefore, we can
safely estimate that the number of iterations used till convergence is of constant order, i.e.,O(1), which
leads to the complexity analysis of Algorithm 4 in Section IV.C and Algorithm 5 in Section V.C.
B. Co-located EN and AP Deployment
Next, we evaluate in Fig. 7 the performance of the proposed Algorithm 5 for co-located ENs and APs,
where the value ofPr achieved by Algorithm 5 is plotted against the number of HAPsused (M). In
particular, we compare its performance with that of LS (withM cluster centers as the initial searching
points) and the CC placement method, i.e., the HAPs are placed at theM cluster centers. We can see that
the proposed greedy algorithm in Algorithm 5 has the best performance among the methods considered.
Nonetheless, the performance gaps over the LS and CC methodsare relatively small compared to that
in Fig. 5. An intuitive explanation is that the doubly-near-far phenomenon for co-located EN and AP
renders the optimal HAPs placement to be around the cluster centers. By comparing Fig. 5 and Fig. 7,
we can see the evident performance advantage of using separated ENs and APs over HAPs. For instance,
December 10, 2015 DRAFT

27
4 6 8 10 12 14 16 18 20 22 240
5
10
15
20
25
30
35
40
No. of HAPs (M)
Nor
mal
ized
CP
U ti
me
GreedyLS
Fig. 8. Comparison of CPU time of the LS and Greedy methods forHAP placement optimization.
the Pr achieved by6 ENs and6 APs in Fig. 5 is−0.1mW, while that achieved by6 HAPs (equivalent
to 6 ENs and6 APs being co-located) is only around−0.17mW.
Although the greedy algorithm and the LS method perform closely, they differ significantly in the
computational complexity. To better visualize the growth rate of complexity, we plot in Fig. 8 the
normalized CPU time of the two methods, where each point on the figure is the normalized against
the CPU time of the respective method whenM = 4. Clearly, we can see that the complexity of the
greedy algorithm increases almost linearly withM , where the CPU time increases approximately6 times
whenM increases from4 to 24. This matches our complexity analysis for Algorithm 5 in Section V.C
that the complexity increases almost linearly inM whenK is much larger. The LS method, however,
has a much faster increase in complexity withM , where the CPU time increases by around39 times
whenM increases from4 to 24. Therefore, even in a large-size WPCN with largeM , the computation
time of the proposed greedy algorithm is still moderate, while this may be extremely high for the LS
method, e.g., couple of minutes versus several hours forM = 50.
C. Case Study: Separated Versus Co-located EN and AP
Finally, we present a case study to compare the cost of node placement achieved by using either
separated or co-located ENs and APs. Here, we consider a WPCNwith 60 WDs uniformly placed within
December 10, 2015 DRAFT

28
−0.15 −0.1 −0.05 0 0.050
10
20
30
40
(a) Minimum net energy harvesting requirement (γ) / mWD
eplo
ymen
t cos
t/uni
t
−0.15 −0.1 −0.05 0 0.050
10
20
30
40
(b) Minimum net energy harvesting requirement (γ) / mW
Dep
loym
ent c
ost/u
nit
SeparatedCo−located (c
3=1.4)
SeparatedCo−located (c
3=1.05)
7 HAPs10 HAPs
13 HAPs
13 HAPs
19 HAPs
19 HAPs
24 HAPs
(M=4,N=5)
(M=4,N=5)
(M=9,N=4)
(M=9,N=4)
(M=14,N=4)(M=19,N=5)
(M=26,N=4)
(M=19,N=5)(M=14,N=4)
(M=26,N=4)
24 HAPs
10 HAPs7 HAPs
Fig. 9. Comparison of the minimum deployment costs achievedby separated/colocated EN and AP placement optimization methods, wherein (a) c3 = 1.4 and in (b)c3 = 1.05.
the 24m× 24m box region, where the detailed placement is omitted due to the page limit. For the case
of separated ENs and APs, we use Algorithm 4 to enumerate(M,N) pairs that can satisfy a given net
energy harvesting performance requirementγ, and select the one with the minimum cost as the solution.
For the case of HAPs, we use Algorithm 5 to find the minimumM that can satisfy the performance
requirementγ. A point to notice is that, the obtained deployment solutions are sub-optimal to the min-
cost deployment problems with either separated or co-located ENs and APs, i.e., the cost of the optimal
deployment solution can be lower, because Algorithms 4 and 5are sub-optimal to solve problems (13)
and (15), respectively. More effort to further improve the solution performance is needed for future
investigations.
In Fig. 9(a), we show the minimum deployment costs achieved by the two methods under different
performance requirementγ. The number of nodes used by both methods are also marked in the figure.
With {c1, c2, c3} = {0.7, 1, 1.4}, we can see that using separated ENs and APs can achieve much lower
deployment cost than co-located HAPs. In another occasion in Fig. 9(b), the two scheme achieve similar
deployment cost when the cost of a HAP is decreased fromc3 = 1.4 to 1.05. We also observe that, by
allowing the ENs and APs to be separately located, we need much less energy/information access points
than they are co-located to achieve the same performance, thanks to the extra freedom in choosing both
December 10, 2015 DRAFT

29
the numbers and locations of energy/information access points. For instance, whenγ = 0, we need24
separated energy/information access points (M = 19 andN = 5), while 38 co-located energy/information
access points by the19 HAPs. However, we do not intend to claim that using separatedENs and APs is
better than the co-located case. Rather, we show that a cost-effective deployment plan can be efficiently
obtained using the proposed methods. In practice, the choice of using either separated or co-located
ENs and APs depends on a joint consideration of the node deployment costs, the network size and the
performance requirement.
VII. CONCLUSIONS AND FUTURE WORK
In this paper, we studied the node placement optimization problem in WPCN, which aims to minimize
the node deployment cost while satisfying the energy harvesting and communication performance of
WDs. Efficient algorithms were proposed to optimize the nodeplacement of WPCNs with the ENs and
information APs being either separated and co-located. In particular, when ENs and APs are separately
located, simulation results showed that significant deployment cost can be saved by jointly optimizing
the locations of ENs and APs, especially for large-size WPCNs with a large number of ENs and APs
to be deployed. In the case of co-located ENs and APs (HAPs), however, the performance advantage of
node placement optimization is not that significant, where we observed relatively small performance gap
between optimized node placement solutions and that achieved by some simple heuristics, i.e., placing
the HAPs at the cluster centers formed by the WDs. In practice, separated ENs and APs are more suitable
for deploying WPCNs than co-located HAPs, because of the flexibility in choosing both the numbers and
locations of ENs and APs. Nonetheless, because the optimal solution to the node placement problem has
not been obtained in this paper, we may expect further improvement upon our proposed methods in the
future, especially for the case of HAP placement optimization.
Finally, we conclude with some interesting future work directions for the node placement problem in
WPCN. First, the models considered in this paper can be extended to more general setups. Using the uplink
information transmission as example, we assumed in this paper that each WD has fixed association with
a single AP. In practice, dynamic frequency allocation can be applied to enhance the spectral efficiency,
where a WD can transmit to different APs, even multiple APs simultaneously, in different transmission
blocks. Besides, instead of assuming each AP can serve infinite number of WDs, we can allow each
AP to serve finite number of WDs. In addition, we may also consider the presence of uplink co-channel
interference due to frequency reuse in WPCN. The extensionsrequire adding corresponding constraints
December 10, 2015 DRAFT

30
or changing the expression of energy consumption model in the problem formulation of this paper.
Second, it is interesting to consider the hybrid node deployment problem that uses both co-located and
separated ENs/APs. Third, it is practically important to consider the node placement problem with location
constraints, e.g., some areas that may forbid the ENs/APs tobe placed. In addition, the density of ENs
may be constrained to satisfy certain safety considerationon RF power radiation.
APPENDIX
PROOF OF THECONVERGENCE OFALGORITHM 3
Let{
t(l),v(l)j , j = 1, · · · , N
}
denote the optimal solutions of (20) calculated from thel-th (l ≥ 1) set
of assumptions made on the WD-AP associations, denoted byj(l)k , k = 1 · · · , K. Let K(l) denote the set
of WDs to which the optimal solutionv(l)j ’s contradict with the WD-AP assumptions (we consider only
K(l) 6= ∅, because otherwise the algorithm has reached its optimum),i.e.,{
K(l): k = 1 · · · ,K, ||v
j(l)k
−wk|| > minj=1,··· ,N
||v(l)j −wk||
}
. (33)
According to the proposed trial-and-error method,j(l+1)k is set for eachk = 1, · · · , K as
j(l+1)k =
j(l)k , k /∈ K(l),
argminj=1,··· ,N ||v(l)j −wk||, k ∈ K(l).
(34)
Let t(l+1) denote the minimum net energy harvesting rate among all the WDs given the updated WD-AP
associationj(l+1)k ’s and the current AP locationsv(l)
j ’s, i.e.,
t(l+1) = mink=1·,K
(
λk − a1,k − a2,k||vj(l+1)k
−wk||dU)
. (35)
We can see thatt(l+1) ≥ t(l) because the update of WD-AP associations in (34) does not increase the energy
consumption rate of any WD achived by assumingj(l)k , k = 1 · · · , K. Besides,
{
t(l+1),v(l)j , j = 1, · · · , N
}
is a feasible solution of (20) under the association assumption j(l+1)k ’s. Therefore, the optimal solution
{
t(l+1),v(l+1)j , j = 1, · · · , N
}
calculated from the association assumptionj(l+1)k ’s will lead to t(l+1) ≥
t(l+1) ≥ t(l). In other words, the optimal objective of (20) is non-decreasing in each trial-and-error update
of WD-AP associations. This, together with the fact that theoptimal value of (20) is bounded, leads to
the conclusion that the proposed trial-and-error method isconvergent.
REFERENCES
[1] S. Bi, C. K. Ho, and R. Zhang, “Wireless powered communication: opportunities and challenges,”IEEE Commun. Mag., vol. 53, no. 4,
pp. 117-125, Apr. 2015.
December 10, 2015 DRAFT

31
[2] X. Lu, P. Wang, D. Niyato, D. I. Kim, and Z. Han, “Wireless networks with RF energy harvesting: a contemporary survey,”IEEE
Commun. Surveys Tuts., vol. 17, no. 2, pp. 757-789, 2015.
[3] X. Zhou, R. Zhang, and C. K. Ho, “Wireless information andpower transfer: architecture design and rate-energy tradeoff,” IEEE Trans.
Commun., vol. 61, no. 11, pp. 4754-4767, Nov. 2013.
[4] R. Zhang and C. K. Ho, “MIMO broadcasting for simultaneous wireless information and power transfer,”IEEE Trans. Wireless Commun.,
vol. 12, no. 5, pp. 1989-2001, May 2013.
[5] A. Georgiadis, G. Andia, and A. Collado, “Rectenna design and optimization using reciprocity theory and harmonic balance analysis
for electromagnetic (EM) energy harvesting,”IEEE Antennas Wireless Propag. Lett., vol. 9, pp. 444-446, May 2010.
[6] H. Ju and R. Zhang, “Throughput maximization in wirelesspowered communication networks,”IEEE Trans. Wireless Commun., vol. 13,
no. 1, Jan. 2014.
[7] L. Liu, R. Zhang, and K. C. Chua, “Multi-antenna wirelesspowered communication with energy beamforming,”IEEE Trans. Commun.,
vol. 62, no. 12, pp. 4349-4361, Dec. 2014.
[8] H. Ju and R. Zhang, “Optimal resource allocation in full-duplex wireless powered communication network,”IEEE Trans. Commun.,
vol. 62, no. 10, pp. 3528-3540, Oct. 2014.
[9] K. Huang and V. K. N. Lau, “Enabling wireless power transfer in cellular networks: architecture, modeling and deployment,” IEEE
Trans. Wireless Commun., vol. 13, no. 2, pp. 902-912, Feb. 2014.
[10] S. Lee, R. Zhang, and K. B. Huang, “Opportunistic wireless energy harvesting in cognitive radio networks,”IEEE Trans. Wireless
Commun., vol. 12, no. 9, pp. 4788-4799, Sept. 2013.
[11] Y. Che, L. Duan, and R. Zhang, “Spatial throughput maximization of wireless powered communication networks,”IEEE J. Sel. Areas
Commun., vol. 33, no. 8, pp. 1534-1548, Aug. 2015.
[12] A. A. Nasir, X. Zhou, S. Durrani, and R. A. Kennedy, “Wireless-powered relays in cooperative communications: time-switching
relaying protocols and throughput analysis,”IEEE Trans. Commun., vol. 63, no. 5, pp. 1607-1622, May 2015.
[13] I. Krikidis, “Simultaneous information and energy transfer in large-scale networks with/without relaying,”IEEE Trans. Commun.,
vol. 62, no. 3, pp. 900-912, Mar. 2014.
[14] H. Chen, Y. Li, J. L. Rebelatto, B. F. Uchoa-Filho, and B.Vucetic, “Harvest-then-cooperate: wireless-powered cooperative
communications,”IEEE Trans. Signal Process., vol. 63, no. 7, pp. 1700-1711, Apr. 2015.
[15] J. Pan, Y. T. Hou, L. Cai, Y. Shi, and S. X. Shen, “Optimal base-station locations in two-tiered wireless sensor networks,” IEEE Trans.
Mobile Comput., vol. 4, no. 5, pp. 458-473, Sep. 2005.
[16] A. Bogdanov, E. Maneva, and S. Riesenfeld, “Power-aware base station positioning for sensor networks,” inProc. IEEE INFOCOM,
Hong Kong, Mar. 2004.
[17] K. Akkaya, M. Younis, and W. Youssef, “Positioning of base stations in wireless sensor networks,”IEEE Commun. Mag., vol. 45,
no. 4, pp. 96-102, Apr. 2007.
[18] S. R. Gandham, M. Dawande, R. Prakash, and S. Venkatesan, “Energy efficient schemes for wireless sensor networks with multiple
mobile base stations,” inProc. IEEE GLOBECOM, Dec. 2003.
[19] B. Lin, P. H. Ho, L. Xie, X. Shen, and J. Tapolcai, “Optimal Relay Station Placement in Broadband Wireless Access Networks,” IEEE
Trans. Mobile Comput., vol. 9, no. 2, pp. 259-269, Feb. 2010.
[20] A. Goldsmith,Wireless communications, Cambridge University Press, New York, 2005.
[21] Y. T. Hou, Y. Shi, H. D. Sherali, and S. F. Midkiff, “On energy provisioning and relay node placement for wireless sensor networks,”
IEEE Trans. Wireless Commun., vol. 4, no. 5, pp. 2579-2590, Sep. 2005.
[22] X. Liu and P. Mohapatra, “On the deployment of wireless data back-haul networks,”IEEE Trans. Wireless Commun., vol. 6, no. 4,
pp. 1426-1435, Apr 2007.
December 10, 2015 DRAFT

32
[23] S. Bi and R. Zhang, “Wireless power charging control in multiuser broadband networks,” inProc. IEEE ICC Workshops, London,
U.K., Jun. 2015.
[24] N. Michelusi, L. Badia, R. Carli, L. Corradini, and M. Zorzi, “Energy management policies for harvesting-based wireless sensor
devices with battery degradation,”IEEE Trans. Commun., vol. 61, no. 12, pp. 4934-4947, Dec. 2013.
[25] C. M. Bishop,Pattern recognition and machine learning, Springer, New York, 2006.
[26] J. Hromkovic, Algorithmics for hard problems: introduction to combinatorial optimization, randomization, approximation, and
heuristics, Springer-Verlag, Heidelberg, 2010.
[27] S. Boyd and L. Vandenberghe,Convex optimization, Cambridge University Press, New York, 2004.
December 10, 2015 DRAFT