1 grundlagen der modellbildung - bsz-kelheim.de - grundlagen der... · modul: grundlagen der...
TRANSCRIPT

MODUL: Grundlagen der Modellbildung 1
1 Grundlagen der Modellbildung
1.1 Einführung – wieso, weshalb, warum!
Viele Systeme und Prozesse der heutigen Welt sind geprägt durch das komplexe
Zusammenwirken unterschiedlichster Komponenten.
Einfache Beispiele hierfür können sein:
- das Sonnensystem (Physik, Astronomie)
- das Herz-Kreislaufsystem (Biologie)
- die Ökosyteme (Biologie, Geographie)
- das Wirtschaftssystem (Gesellschaftskunde
oder kleinere, konkretere Systeme wie
- Feder-Masse-System (Physik)
Will man diese Systems verstehen, so muss man sich u.a. mit ihren Komponenten und deren
Beziehungen zueinander auseinandersetzen. Kurz gesagt:
Ein System ista) eine Gesamtheit von Elementen, b) die in Beziehung zueinander stehen und
c) von seiner Umgebung durch klare Grenzen getrennt, d) kann mit dieser aber auch in
Wechselwirkung treten.
In der Literatur findet man viele Unterscheidungsmöglichkeiten von Systemen:
Nach ihrer Entstehung:
Natürliche Systeme (anorganische: Planeten-, Atomsystem; organische: Pflanzen und
Tiere), künstliche (von Menschen gestaltete) Systeme (logische Systeme: Alphabet,
Logiksymbole, Zahlensysteme, Kontenplan; mechanische Systeme: Technische
Maschinen, Automaten; soziale Systeme: Familiengemeinschaft, Staatsvolk,
Religionsgemeinschaften; kombinierte Systeme: Haushaltung, Unternehmung,
Staatsorganisation, Kirche).
offene und geschlossene Systeme
statische (Koordinatensystem) und dynamische Systeme (Herz-Kreislaufsystem).
Für eine weitere Betrachtung interessieren die dynamischen Systeme- zeitabhängige
Prozesse, die durch geeignete mathematische Modelle abgebildet werden können.
Mit Hilfe von Modellbildungswerkzeugen (Simulationsprogrammen) können diese Systeme
simuliert und Wirkungszusammenhänge graphisch dargestellt werden. Dabei kann man
Informationen und Erfahrungen sammeln, Schlüsse ziehen, Vergleiche anstellen, Alternativen
bewerten, Entscheidungen treffen, Strategien entwickeln, ... – und alles ohne etwas zu
zerstören (Stabilität von Bauwerken und Fahrzeugen, Auswirkungen sozialer Bewegungen
und Prozesse, Stadt – und Bevölkerungsentwicklung, Umwelt- und Klimaveränderung ...)
Die Simulation ist viel kostengünstiger, schneller und weniger risikobehaftet bzw. gefährlich
als andere Vorgehen – z.B. Experimente. Voraussetzung für Simulation ist Modellbildung.
Modelle müssen das Systemverhalten möglichst realitätsnah beschreiben und die System-
Parameter, Ein- und Ausgabegrößen miteinander in Beziehung setzen.

MODUL: Grundlagen der Modellbildung 2
Begriffe
Ein System ist a) eine Gesamtheit von Elementen, b) die in Beziehung zueinander stehen und
c) von seiner Umgebung durch klare Grenzen getrennt, d) kann mit dieser aber auch in
Wechselwirkung treten.
Ein Modell ist immer eine vereinfachte, strukturgleiche Abbildung eines
interessierendenRealitätsausschnitts. Es soll nur für diesen Ausschnitt eine gültige Aussage
vermitteln. Ein Modell zur Simulation von dynamischem Verhalten muss selbst dynamisches
Verhalten erzeugen können.
Sinn der Modellbildung
- Hilfsmittel im Umgang mit der Realität
- Verallgemeinerung
- Verstehen von Systemen und Prozessen
- Verhaltensprognosen
- Testen gefährlicher/teurer Vorgänge
- Veranschaulichung komplexer Zusammenhänge
- Training (Fahr-, Flugsimulatoren)
Vorteile
- Das Originalsystem muss nicht angegriffen werden.
- Der Eingriff in das Originalsystem kann aus moralischen, wirtschaftlichen oder
sonstigen Gründen nicht akzeptabel sein.
- Die Analyse mikroskopischer und makroskopischer Prozesse wird ermöglicht.
- Sowohl extrem schnelle als auch extrem langsame Prozesse können beobachtet
werden
Beispielfragestellungen
- Wirtschaft:Was passiert, wenn wir unsere Produktionskapazitäten verändern?
- Technologie: Läuft ein Verbrennungsmotor sparsamer, wenn man dieses oder jenes
Bauteil verändert?
- Management: Welche Folgen hat eine Umstrukturierung der Verwaltung?
- Umweltschutz: Wann wird das Waldsterben zu einer ökologischen Katastrophe
führen, wenn wir nicht unsere Mobilitätsgewohnheiten ändern?

MODUL: Grundlagen der Modellbildung 3
Beispiel zur Einführung
Prozess „M&M“
Aufgabe: Eine Tüte M&M wird auf den Tisch geschüttet.
Die Anzahl der M&Ms, deren M sichtbar ist, wird notiert und
die anderen M&Ms werden gegessen. Der Prozess wird in
einer Tabellenkalkulation tabellarisch erfasst und grafisch
dargestellt. Anschließend mit Hilfe mathematischer
Beziehungen simuliert.
Ergebnis:
Experiment:
Nr. M sichtbar
0 100
1 54
2 30
3 14
4 6
5 2
6 1
Simulation:
Nr. M sichtbar
0 100
1 50
2 25
3 12
4 6
5 3
6 1
verwendete Formel: =ABRUNDEN(B14/2;0)

MODUL: Grundlagen der Modellbildung 4
Beispiel zur Einführung
Prozess „Flüssigkeitsheber“
Aufgabe: Aus einem mit 100 ml Wasser gefüllten
Standzylinder (A) wird durch Eintauchen eines
Glasrohres und Verschließen mit dem Daumen eine
Flüssigkeitsmenge abgehoben und in einen gleich großen
Standzylinder (B) gefüllt. Dies wird so lange wiederholt,
bis kaum noch Flüssigkeit in A zurückbleibt. Bei jeder
Hebung ist die entnommene Menge dem jeweiligen
Flüssigkeitsstand proportional.
(Ohne durchgeführtes Experiment gilt: Bei der ersten
Hebung werden 10 ml vom Standzylinder A in den
Standzylinder B gehoben.)
1. Bilden Sie diesen Prozess in einer
Tabellenkalkulation nach und bestimmen Sie die
Flüssigkeitsmenge im Standzylinder A nach der 10. Hebung. Stellen Sie in einem
Diagramm die Flüssigkeitsmenge in den Standzylindern A in Abhängigkeit von der
Anzahl der Hebungen dar.
2. Stellen Sie in einem Diagramm zusätzlich die Flüssigkeitsmenge in dem Standzylinder B
in Abhängigkeitvon der Anzahl der Hebungen dar.
Ergebnis:
Nr. Zylinder A Zylinder B
0 100 0
1 90 10
2 81 19
3 73 27
4 66 34
5 59 41
6 53 47
7 48 52
8 43 57
9 39 61
10 35 65
11 31 69
12 28 72
13 25 75
14 23 77
15 21 79
Zylinder A: =B2-B2*0,1
Zylinder B: =C2+B2*0,1
allgemein: Zylinder A neu = Zylinder A alt – Zylinder A alt *0,1
Zylinder B neu = Zylinder B alt + Zylinder A alt *0,1
(A) (B)

MODUL: Grundlagen der Modellbildung 5
1.2 System Dynamics Notation
Die System Dynamics oder Systemdynamik ist eine von Jay W. Forrester1Ende Mitte der
1950er Jahreentwickelte Methodik zur ganzheitlichen Analyse und Simulation komplexer und
dynamischer Systeme.
Die System Dynamics Notation ist eine Darstellungsform von Abläufen und
Zusammenhängen in einem Flussdiagramm. Es werden Zustands- und Flussgrößen
(Änderungsraten) unterschieden, so dass eine numerische Simulation durch diskret getaktete
Iterationsschritte mit festem Zeitintervall dt erfolgen kann. Mathematischer Hintergrund ist
die numerische Integration von Differenzengleichungssystemen. Die System-Dynamics-
Notation besteht nur aus wenigen Symbolen, die je nach verwendetem
Programm etwas unterschiedlich aussehen:
Zustandsgröße des Modells. Vorstellbar als Behälter (Integrator), in dem das
Material, die Größe gelagert (akkumuliert) wird. Sie muss zu Beginn einen
Anfangswert besitzen. Ihr Wert ändert sich additiv im Laufe der Simulation.
Die Änderung der Zustandsgröße wird durch eine Änderungsrate beschrieben.
Sie verhält sich wie ein Ventil. Die Einheit ist immer Menge pro Zeiteinheit.
Die Änderungsrate besitzt keinen vorzugebenen Anfangswert. Er wird zu jedem
Zeitpunkt aus den einwirkenden Systemelementen berechnet.
Hilfsvariable, Konstante und Berechnungen strukturieren den Informationsfluss.
Pfeile zeigen Zusammenhänge und Wirkungsrichtungen an.
Die Umwelt des Modells, die nicht genauer untersucht wird (Senken, Quellen),
wird durch Wolken dargestellt.
1Jay Wright Forrester; * 14. Juli 1918; US-amerikanischer Pionier der Computertechnik und der
Systemwissenschaft. Er gilt als Begründer der Systemdynamik.

MODUL: Grundlagen der Modellbildung 6
Beispiel zur System Dynamics Notation
Prozess „Flüssigkeitsheber“
Aufgabe: Entwickeln Sie für den Prozess aus der Einführung ein dynamisches Modell.Verwenden Sie die im Unterricht verwendeten Symbole zur Darstellung von Modellen(System Dynamics).Bestimmen Sie die erforderlichen Modellgleichungen und alle Startwerte für dieSimulation.
Ergebnis: Zustände Startwert
Zylinder_A = 100
Zylinder_B = 0
Zustandsänderung
Hebung = dA*Zylinder_A
Konstante
dA = 0,10
Zustandsgleichungen
Zylinder_A.neu = Zylinder_A.alt + dt∙(–Hebung)
Zylinder_B.neu = Zylinder_B.alt + dt∙(Hebung)
Bemerkung: Zylinder B kann hier entfallen und als Umwelt
gekennzeichnet werden, um die Verwendung der
Umwelt verständlich zu machen.

MODUL: Grundlagen der Modellbildung 7
Beispiel zur System Dynamics Notation
Prozess „Radioaktiver Zerfall mit Tochterkern“
Aufgabe: Der Prozess „Flüssigkeitsheber“ stellt auch ein Modell für den radioaktiven Zerfall eines Isotops dar. Ordnen Sie die entsprechenden Größen in den Modellgleichungen den Größen zu, die den radioaktiven Zerfall beschreiben. Radioaktive Materialien zerfallen oft nicht in einem Zerfall zu einem stabilen Isotop, sondern die Tochterkerne sind ebenfalls instabilund zerfallen wieder mit einer anderen Zerfallskonstante. Erweitern Sie das Modell, um dieses Verhalten einer radioaktiven Substanz zu simulieren! Ergebnis:

MODUL: Grundlagen der Modellbildung 8
Beispiel zur System Dynamics Notation
Prozess „Flüssigkeitsheber 2“
Aufgabe: In einem neuen Versuch wird wieder vom
Standzylinder A (voll) in den Standzylinder B (leer) mit
einem Glasrohr Wasser gehoben. Im Unterschied zur
Durchführung des Versuchs „Flüssigkeitsheber“ wird
aber die sich im Standzylinder B sammelnde Flüssigkeit
um die Menge vermindert, die sich beim vollen
Eintauchen im Standzylinder B im Glasrohr sammelt.
Diese Menge wird wieder in den Standzylinder A
zurückgeführt.
1. Erweitern Sie das Modell „Flüssigkeitsheber“ entsprechend der neuen
Aufgabenstellung.
2. Skizzieren Sie rein qualitativ in einem Diagramm den Flüssigkeitsstand in den
beidenStandzylindern A und B in Abhängigkeit von der Zahl der Hebungen.

MODUL: Grundlagen der Modellbildung 9
1.3 Modellbildung - Vorgehensweise
Folgende Schritte haben sich zur Entwicklung eines dynamischen Modells bewährt:
Das reale System wird beobachtet und analysiert. Definition der
Problemstellung und des Modellzwecks. Dem Modellzweck entsprechend
wird definiert, was zu dem System und was zu seiner Umgebung gehört.
Alle Komponenten, die zum System gehören, werden benannt und deren
Zusammenhang beschrieben. Es wird jetzt festgelegt, welche Größen als
externe Umwelteinwirkungen betrachtet werden sollen und welche als Teil
des zu untersuchenden Systems angesehen und im Modell verwendet
werden müssen.
Im Wortmodell erfolgt die Beschreibung des Systems und seiner Elemente,
seiner Funktionen und ihrer strukturellen Verknüpfungen in der
Umgangssprache. Es lassen sich jetzt bereits die wichtigen Systemelemente
feststellen und in die entsprechenden Kategorien einteilen (externe Parameter,
Prozessparameter, zeitabhängige Umwelteinwirkungen, Zustandsgrößen,
Anfangsbedingungen, Änderungsraten der Zustandsgrößen, Zwischengrößen)
Das Wirkungsdiagramm ist ein Diagramm der Systemelemente und ihrer
Verknüpfungen. Die Systemelemente werden hier zunächst durch ihre
umgangssprachlichen Namen gekennzeichnet und mit Pfeilen verbunden, die
in der Richtung der Wirkungen verlaufen, die in den vorhergehenden
Modellierungsschritten ermittelt wurden.Im Wirkungsdiagramm werden nur
die Verbindungen zwischen Systemelementen gezeigt, nicht aber deren
jeweilige Funktion.
Das Flussdiagrammist im Wesentlichen ein quantifiziertes
Wirkungsdiagramm, das alle Informationen für das Simulationsprogramm
enthält. Es wird entworfen, nachdem die Elemente, ihre Funktionen, ihre
Struktur, alle Parameter sowie die funktionalen Verknüpfungen zwischen den
Prozesselementen bestimmt worden sind. Desweiteren müssen alle externen
oder Prozessparameter, die Anfangswerte der Zustandsgrößen und zusätzlich
die Quantifizierungen aller funktionalen Verknüpfungen zwischen den
Prozesselementen bestimmt werden.
Anschließend erfolgt das Durchrechnen des Modells über eine vorgegebene
Zeitperiode für einen vorgeschriebenen Satz von Umwelteinwirkungen,
Parametern und Anfangsbedingungen – die Simulation. Unter Umständen
sind mehrere Läufe notwendig, um das System und sein Verhalten zu
verstehen und um die richtigen Eingriffsstrategien zu entwickeln
Anschließend erfolgt die Gültigkeitsprüfung, um die Strukturgültigkeit, die
Verhaltensgültigkeit, die empirische und die Anwendungsgültigkeit zu
überprüfen. Das führt im Allgemeinen dazu, dass noch Fehler und
unbefriedigende Formulierungen gefunden werden, die Verbesserungen und
Umformulierungen von Teilen des Modells verlangen.
Reales System
Systemstudie:
Wortmodell
Wirkungsplan:
Kausaldiagramm
Simulation:
Flussdiagramm
Modelltest

MODUL: Grundlagen der Modellbildung 10
Beispiel zur Modellbildung – technischer Zweig
Prozess „Mechanisches Schwingersystem“
Aufgabe: Wir betrachten eine Masse m,
die auf einer glatten Oberfläche gleiten kann.
- Die Masse ist über eine Feder mit einem
festen Punkt verbunden.
- Falls sie aus ihrer Ruheposition ausgelenkt
und dann freigelassen wird, wird die Feder die Masse zurückziehen (oder drücken).
- ZA: In Abhängigkeit von der Größe der Gleitreibung wird die Masse über den Ruhepunkt
hinausschießen, sich verlangsamen, die Richtung ändern und in dieser Weise mehrfach hin
und her schwingen, bis alle kinetische Energie durch die Gleitreibung absorbiert worden
ist.
Wortmodell:
- Wenn die Feder durch eine Anfangsauslenkung gestreckt wird, entsteht eine Federkraft,
die dieser Auslenkung entgegenwirkt.
- Die Federkraft hängt von der Federkonstante ab, d. h. der Kraft pro Auslenkung.
- Die Bewegung der Masse bewirkt außerdem eine Reibungskraft, die der Bewegung
entgegenwirkt. Wenn wir laminare Reibung für diesen Gleitvorgang annehmen, so hängt
die Dämpfungskraft vom Dämpfungsparameter, d. h. der Dämpferkraft pro
Geschwindigkeit, ab.
- Die auf die Masse einwirkende Verzögerungskraft ist die Summe der beiden Kräfte.
- Die Verzögerung der Masse ist geringer, wenn die Masse selbst größer ist.
- Je größer die Beschleunigung, umso höher wird die daraus resultierende Geschwindigkeit
der Masse sein.
- Je größer außerdem die Geschwindigkeit der Masse ist, umso größer wird wiederum die
daraus resultierende Auslenkung. Diese verursacht wiederum eine Federkraft, während die
Geschwindigkeit eine entsprechende Dämpfungskraft verursacht.
Wirkungsdiagramm:

MODUL: Grundlagen der Modellbildung 11
Flussdiagramm:
ohne Dämpfung mit Dämpfung
Bemerkung:
Bei unpassenden Parameter-Einstellungen kann es zu fehlerhaften Ergebnissen kommen. Hier
zeigt sich die absolute Notwendigkeit, Simulationsergebnisse – und seien die Graphen und
Kurven auch noch so schön – genau zu interpretieren und zu überprüfen. Nur durch eine
exakte Planung der Simulation
(Integrationsverfahren, Parameter-
einstellung, auszugebende Werte, Art
der Darstellung) lassen sich verwertbare
Ergebnisse erzielen.
Der nebenstehende Graph entsteht bei
negativer Federkonstante.

MODUL: Grundlagen der Modellbildung 12
ohne Dämpfung
mit Dämpfung

MODUL: Grundlagen der Modellbildung 13
Beispiel zur Modellbildung – nichttechnischer Zweig
Prozess „Tilgungsplan“
Aufgabe: Für ein Darlehen von D=100.000 € beträgt die jährliche
Rückzahlung(Annuität) A=6.000 €.
Darin enthalten sind der jährliche Darlehenszins von DZ=5 % auf den
jeweiligen Darlehensrest und die Tilgung T.
Erstellen Sie einen Tilgungsplan, der die jeweilige Restschuld und den
aktuellen Zinsbetrag Z angibt.
Wortmodell
Der jährliche Zinssatz und die aktuelle Darlehenssumme bestimmen die jährliche
Zinszahlung.
Die Annuität setzt sich aus der jährlichen Zinszahlung und der jährlichen Tilgung
zusammen.
Die jährliche Tilgung reduziert die aktuelle Darlehenssumme.
Wirkungsplan
Flussdiagramm
Zustandsgleichungen Darlehenneu = Darlehenalt+ dt∙(-Rückzahlung)
Parameter Annuität A = 6.000 €
Zinssatz ZS = 5,0 %
Zwischengrößen Zinsbetrag = Darlehen * Zinssatz
Tilgung = Annuität – Zinsbetrag
Anfangswert der Zustandsgröße D0 = 100.000 €
Änderung der Zustandsgröße Rückzahlung = Tilgung (pro Zeiteinheit)

MODUL: Grundlagen der Modellbildung 14
1.3 Modellbildung –grundlegende Modelle
Mit Hilfe der Modellbildung lassen sich grundlegende, auf mathematischen Funktionen beruhende, natürlich vorkommende Abläufe simulieren.
Diese kann man in 5 Modelltypen unterscheiden.
Modelltyp 1 Modelltyp 2 Modelltyp 3 Modelltyp 4 Modelltyp 5
Kausal-
diagramm
A B A B C A B
A B C
A B C
Fluss-
diagramm
Modell-
gleichungen
Bt:= Bt-1 + A∙dt
A=const
Bt:= Bt-1 + A∙dt
Ct := Ct-1 + Bt∙dt
A=const
Bt:= Bt-1 + A∙dt
At := b ∙ Bt-1
Bt:= Bt-1 + At∙dt
Ct := Ct-1 + Bt∙dt
At:= – c ∙ Ct-1
At := At-1 – Bt-1∙dt
Ct := Ct-1 + Bt-1∙dt
Bt:= At ∙ Ct ∙ const
typischer
Verlauf des
Graphen
analytischer
Lösungstyp
𝑦 = 𝑎 ∙ 𝑥 + 𝑏 𝑦 = 𝑎 ∙ 𝑥2 + 𝑏 ∙ 𝑥 + 𝑐 𝑦 = 𝑎 ∙ 𝑏𝑥 + 𝑐 𝑦 = a ∙ sin(𝑥) 𝑦 =𝑏
1 + 𝑒 𝑥−𝑐
𝑎
+ 𝑑
Fallbeispiele
Badewanne füllen,
gleichförmige Bewegung,
Ratensparen,
Mieteinnahmen, konstante
Akkumulation
gleichförmig
beschleunigte
Bewegung, freier Fall
Zinseszins, Wachstum
einer Population,
radioaktiver Zerfall
Räuber-Beute-System,
Federpendel,
elektrischer
Schwingkreis
logistisches Wachstum,
Ausbreitung einer
Krankheit

MODUL: Grundlagen der Modellbildung 15
1.3 Modellbildung –grundlegende Modelle
Mit Hilfe der Modellbildung lassen sich grundlegende, auf mathematischen Funktionen beruhende, natürlich vorkommende Abläufe simulieren.
Diese kann man in 5 Modelltypen unterscheiden.
Modelltyp 1 Modelltyp 2 Modelltyp 3 Modelltyp 4 Modelltyp 5
Kausal-
diagramm
Fluss-
diagramm
Modell-
gleichungen
typischer
Verlauf des
Graphen
analytischer
Lösungstyp
Fallbeispiele

MODUL: Grundlagen der Modellbildung 16
Modelltyp 1 – Additives Wachstum
Die Wachstumsgröße B (im Beispiel Population genannt)
wird durch Addition des alten Wertes der Größe B und einem
konstanten Zuwachs A berechnet.
Lineares oder additives Wachstum kann in der Natur über
einen längeren Zeitraum nicht beobachtet werden. Lediglich
für kurze Zeiträume können Wachstumsvorgänge durch
additives Wachstum angenähert werden.
SDN – Beispiel
Flussdiagramm Zeitdiagramm
Zustandsgleichungen
Population.neu = Population.alt + dt∙(Zuwachs)
Startwert Population = 0
Zuwachs = 1
Beispiele:
Badewanne füllen, gleichförmige Bewegung, Ratensparen, Mieteinnahmen, konstante
Akkumulation
A B
Bt:= Bt-1 + A∙dt
A=const
𝑦 = 𝑎 ∙ 𝑥 + 𝑏

MODUL: Grundlagen der Modellbildung 17
Beispiel zu Modelltyp 1
Prozess „Die gleichförmige Bewegung“
Aufgabe: Bei einer gleichförmigen
Bewegung wird der Ort in Abhängigkeit von der
konstanten Geschwindigkeit v beschrieben. Es
gilt x = v∙t. Hierbei ist die Geschwindigkeit die
Änderungsrate des zurückgelegten Weges:
𝑣 = 𝑥 =𝑑𝑥
𝑑𝑡 .
Es gilt demnach dx = v∙dt mit dx = xt – xt-1 bzw. 𝑥 = 𝑣 ∙ 𝑑𝑡𝑡
𝑡−1
Erstellen Sie das Modell „Bewegung 1“ zur Darstellung des Weges in Abhängigkeit von der
Zeit.
Wortmodell:
- Der Weg beschreibt den aktuellen Zustand (Ort) des Körpers
- Die Änderungsrate des Weges ist die Geschwindigkeit
Wirkungsdiagramm:
Flussdiagramm:
Zustandsgleichungen Wegt = Wegt-1 + dt ∙ (Geschwindigkeit)
Startwert Weg = 0
Zustandsänderungen Geschwindigkeit = 10
Zeitdiagramm
Geschwindigkeit Weg

MODUL: Grundlagen der Modellbildung 18
Beispiel zu Modelltyp 1
Prozess „Erdgasverbrauch 1“
Aufgabe: Die Gesamtreserven des
Erdgasvorkommens betrugen 2007 ca.
180 Billionen m3.
Nimmt man eine konstante Förderung
von 3,0 Billionen m3 pro Jahr an, so
kann man leicht abschätzen, wie lange
der Reserven ausreichen – die
statistische Reichweite.
Erstellen Sie das Modell „Erdgasverbrauch 1“ zur Darstellung der Reserven in Abhängigkeit
von der Zeit.
Wortmodell:
-
-
Wirkungsdiagramm:
Flussdiagramm:
Zustandsgleichungen Reservent = Reservent-1 + dt ∙ (-Förderung)
Startwert Reserven = 180
Zustandsänderungen Förderung = 3,0
Zeitdiagramm
Förderung Reserven

MODUL: Grundlagen der Modellbildung 19
Modelltyp 2 – Quadratisches Wachstum
Bei diesem Wachstum wird auch der Zuwachs durch eine dritte
Größe beeinflusst.
gleichförmig beschleunigte Bewegung, freier Fall
A B C
Bt:= Bt-1 + A∙dt
Ct:= Ct-1 + Bt∙dt
A=const
𝑦 = 𝑎 ∙ 𝑥2 + 𝑏 ∙ 𝑥 + 𝑐

MODUL: Grundlagen der Modellbildung 20
Beispiel zu Modelltyp 2
Prozess „Die gleichmäßig beschleunigte Bewegung“
Aufgabe: Bei einer gleichmäßig beschleunigten
Bewegung wird der Ort in Abhängigkeit von der
Geschwindigkeit v beschrieben. Auch hier gilt: 𝑣 = 𝑥 =𝑑𝑥
𝑑𝑡
.Die Geschwindigkeit wird aber auch durch eine konstante
Beschleunigung (oder Verzögerung) beeinflusst. Es gilt
v = a∙t. Hierbei ist die Beschleunigung die Änderungsrate
der Geschwindigkeit: 𝑎 = 𝑣 =𝑑𝑣
𝑑𝑡 .
Es gilt demnach dv = a∙dt mit dv = vt – vt-1 und
dx = v∙dt mit dx = xt – xt-1 .
Erstellen Sie das Modell „Bewegung 2“ zur Darstellung des Weges in Abhängigkeit von der
Zeit.
Wortmodell:
- Der Weg beschreibt den aktuellen Zustand (Ort) des Körpers
- Die Änderungsrate des Weges ist die Geschwindigkeit
- Die Änderungsrate der Geschwindigkeit ist die Beschleunigung
Wirkungsdiagramm:
Flussdiagramm:
Zustandsgleichungen
Wegt = Wegt-1 + dt ∙ (Geschwindigkeit)
Startwert Weg = 0
Geschwindigkeitt = Geschwindigkeitt-1 + dt ∙ (Beschleunigung)
Startwert Geschwindigkeit = 0
Zustandsänderungen Wegänderungsrate = Geschwindigkeit
Beschleunigung = 1
Zeitdiagramm
Geschwindigkeit Weg Beschleunigung

MODUL: Grundlagen der Modellbildung 21
Beispiel zu Modelltyp 2 (3)
Prozess „Der freie Fall mit Luftwiderstand“
Aufgabe: Der freie Fall ist ein Sonderfall der
gleichmäßig beschleunigten Bewegung. Die
Beschleunigung wird durch die Gewichtskraft des
fallenden Körpers verursacht, die durch Luftreibung
verringert wird. Für kleine Fallstrecken kann man von
einer konstanten Gewichtskraft und einer konstanten
Dichte der Luft ausgehen. Damit gilt für die Reibungskraft
FR = ½∙cw∙A∙ρL∙v2. (cw=0,78; A=0,64m
2;ρL=1,23kgm
-3).
Passen Sie das Modell „Die gleichmäßig beschleunigte Bewegung“ an
und verändern Sie es dahingehend, dass es dem freien Fall (z.B. eines
Tischtennisballes) mit Einfluss des Luftwiderstandes entspricht. Passen
Sie die Parameter entsprechend an.
Wortmodell
Wirkungsdiagramm
Flussdiagramm
Zustandsgleichungen
v.neu<-- v.alt + dt*(dv)
Startwert v = 0 s_theoretisch.neu<-- s_theoretisch.alt + dt*(ds)
Startwert s_theoretisch = 0
Zustandsänderungen
dv = a ds = v
Konstanten Luftdichte = 1,23
m = 0,0027
g = 9,81 Widerstandsbeiwert = 0,45
Querschnittsfläche = 0,001257 (Tischtennisball d = 4,0cm)
Zwischenwerte
Gewichtskraft = m*g
Strömungswiderstandskraft = Widerstandsbeiwert*Querschnittsfläche*Luftdichte*Quadrat(v)/2
a = (Gewichtskraft-Strömungswiderstandskraft)/m

MODUL: Grundlagen der Modellbildung 22
Beispiel zu Modelltyp 2
Prozess „Erdgasförderung 2“
Aufgabe: Über einen längeren
Zeitraum betrachtet ist die Annahme einer
konstanten Förderung nicht realistisch. In
den letzten 25 Jahren stieg der
Erdgasverbauch nahezu konstant um
1,5 Billionen m3.
Erstellen Sie das Modell
„Erdgasförderung 2“ zur Darstellung der Reserven in Abhängigkeit von der Zeit.
Wortmodell:
-
-
-
Wirkungsdiagramm:
Flussdiagramm:
Zustandsgleichungen
Reservent = Reservent-1 + dt ∙ (Förderung)
Startwert Reserven = 180
Förderungt = Förderungt-1 + dt ∙ (Fördermengenzuwachs)
Startwert Förderung = 3,0
Zustandsänderungen dReserven = Förderung
dFörderung = Fördermengenzuwachs = 1,5/25
Zeitdiagramm
Förderung Reserven Fördermengenzuwachs
MODUL: Grundlagen der Modellbildung 23
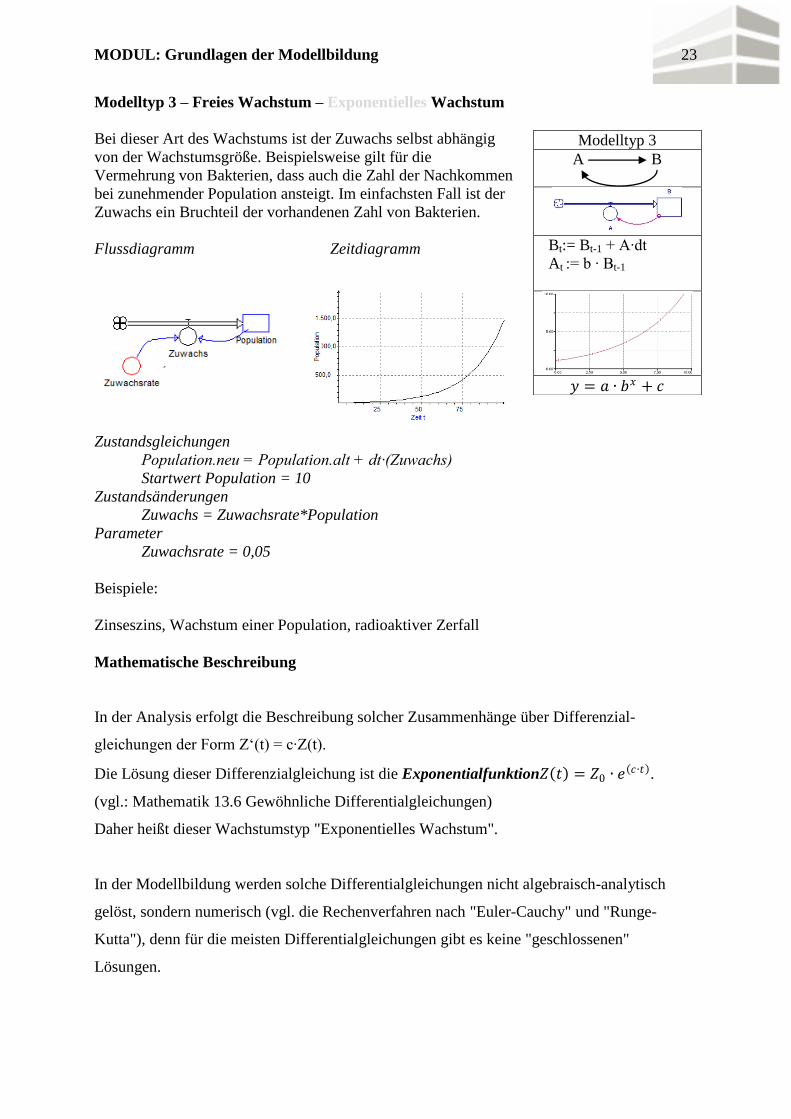
Modelltyp 3 – Freies Wachstum – Exponentielles Wachstum
Bei dieser Art des Wachstums ist der Zuwachs selbst abhängig
von der Wachstumsgröße. Beispielsweise gilt für die
Vermehrung von Bakterien, dass auch die Zahl der Nachkommen
bei zunehmender Population ansteigt. Im einfachsten Fall ist der
Zuwachs ein Bruchteil der vorhandenen Zahl von Bakterien.
Flussdiagramm Zeitdiagramm
Zustandsgleichungen
Population.neu = Population.alt + dt∙(Zuwachs)
Startwert Population = 10
Zustandsänderungen
Zuwachs = Zuwachsrate*Population
Parameter
Zuwachsrate = 0,05
Beispiele:
Zinseszins, Wachstum einer Population, radioaktiver Zerfall
Mathematische Beschreibung
In der Analysis erfolgt die Beschreibung solcher Zusammenhänge über Differenzial-
gleichungen der Form Z‘(t) = c∙Z(t).
Die Lösung dieser Differenzialgleichung ist die Exponentialfunktion𝑍 𝑡 = 𝑍0 ∙ 𝑒 𝑐∙𝑡 .
(vgl.: Mathematik 13.6 Gewöhnliche Differentialgleichungen)
Daher heißt dieser Wachstumstyp "Exponentielles Wachstum".
In der Modellbildung werden solche Differentialgleichungen nicht algebraisch-analytisch
gelöst, sondern numerisch (vgl. die Rechenverfahren nach "Euler-Cauchy" und "Runge-
Kutta"), denn für die meisten Differentialgleichungen gibt es keine "geschlossenen"
Lösungen.
Modelltyp 3
A B
Bt:= Bt-1 + A∙dt
At := b ∙ Bt-1
𝑦 = 𝑎 ∙ 𝑏𝑥 + 𝑐

MODUL: Grundlagen der Modellbildung 24
Beispiele zu Modelltyp 3
1. Prozess „Kernzerfall“
Schauen Sie sich diesen Prozess hinsichtlich Flussdiagramm und Zustandsgleichungen
an und vergleichen Sie diese mit dem einführenden Beispiel.
2. Prozess „Der freie Fall mit Luftwiderstand“
Für welche Größe ist der Modelltyp 3 anwendbar? Stellen Sie diese Größe im
Zeitdiagramm dar.
3. Prozess „Abkühlen einer Tasse Tee“
Aufgabe: Die Temperatur einer heißen Tasse Tee nimmt im Laufe der Zeit ab.
Der Vorgang läuft aber nicht linear ab. Die Abkühlung erfolgt um so schneller, je
größer die Temperaturdifferenz zur Umgebungstemperatur ist (und wird durch die
Tasseneigenschaft – Leitfähigkeit des Materials bestimmt).
Erstellen Sie ein geeignetes Modell (Flussdiagramm, Zustandsgleichungen …).
4. Prozess „Entladen eines Kondensators“
Aufgabe: Ein Kondensator wird über einen ohmschen Widerstand entladen.
Dabei nimmt die Ladung auf den Kondensatorplatten ab, da ein Strom 𝐼 =𝑈
𝑅 fließt. Es
gilt 𝐼 =𝑑𝑄
𝑑𝑡und 𝑈 =
𝑄
𝐶. (Parameter: C = 4∙10
-6F; R = 10 kΩ; Q = 4,8∙10
-5C)
Erstellen Sie ein geeignetes Modell (Flussdiagramm, Zustandsgleichungen …).
5. Prozess „Aufladen eines Kondensators“
Aufgabe: Ein Kondensator wird über einen Widerstand R durch eine
Spannungsquelle U0 aufgeladen. In dieser Reihenschaltung gilt: U0 = UR + UC. Die
Stromstärke wird durch den ohmschen Widerstand bestimmt.
(Parameter: C = 4∙10-6
F; R = 100 kΩ; U0 =12 V)
Erstellen Sie ein geeignetes Modell für die Ladung Q und Stromstärke I während des
Ladevorganges (Flussdiagramm, Zustandsgleichungen …).
6. Prozess „Einschalten einer Spule“
Aufgabe: Erstellen Sie ein geeignetes Modell für die Stromstärke I während des
Einschaltvorganges (Flussdiagramm, Zustandsgleichungen …).
(Parameter: L = 50 H; R = 1000 Ω; U0 =10 V)
Finden Sie selbstständig die physikalischen Gleichungen, die diesem Vorgang zu
Grunde liegen.
7. Prozess „Ausschalten einer Spule“
Aufgabe: Erstellen Sie ein geeignetes Modell für die Stromstärke I während des
Ausschaltvorganges (Flussdiagramm, Zustandsgleichungen …).
(Parameter: L = 5 H; R = 100 Ω)
Finden Sie selbstständig die physikalischen Gleichungen, die diesem Vorgang zu
Grunde liegen.

MODUL: Grundlagen der Modellbildung 25
Das Euler-Cauchy-Verfahren (aus „http://www.kohorst-lemgo.de/modell/euler.htm“)
Aufgabe:
Von einer Zustandsgröße Z seien bekannt:
der aktuelle Wert Z(t0) zum Zeitpunkt t0, d.h. anschaulich: ein Punkt A(t0;Z(t0)).
eine Differentialgleichung Z'(t) = f(t;Z(t)) für die momentane Änderungsrate Z'(t)
bzw. für die Steigung m = m(t) = Z'(t) zu einem beliebigen Zeitpunkt t .
Gesucht ist nun ein Prognosewert P(t0 + dt) für den leider unbekannten tatsächlichen
Wert Z(t0 + dt) nach einer gewissen Zeitspanne dt.
Verfahren - Lineare Fortsetzung von Z mit der Tangentenfunktion P
Aus den obigen Angaben (Punkt A und Steigung
m = m(t0) im Punkt A ) lässt sich mit Hilfe des
Steigungsdreiecks eine lineare Funktion P ermitteln,
denn es ist (vgl. Skizze):
m t0 =dP
dt=
P t0+dt −P(t0)
dt bzw.
P t0 + dt = P t0 + m t0 dt
Diese lineare Funktion P lässt sich interpretieren als "Lineare Fortsetzung" der Funktion Z
vom Zeitpunkt t0 bis zum Zeitpunkt t0+dt.
Mathematisch ausgedrückt:
Die Prognose-Funktion P ist die Tangentenfunktion zur (differenzierbaren) Funktion Z im
Zeitpunkt t0.
In all den Fällen, in denen der Graph von Z im
betrachteten Zeitintervall dt nur wenig von einer
Geraden abweicht, stellt der nach dem obigen Euler-
Cauchy-Verfahren ermittelte Wert P(t0+dt) einen
brauchbaren Prognosewert für den vorherzusagenden
Wert Z(t0+dt) dar, denn in diesen Fällen gilt:
Z(t0+dt) ≈ P(t0+dt)
Der zugehörige Punkt B(t0+dt;P(t0+dt) wird als der gesuchte "nächste" Kurvenpunkt
prognostiziert und dient als Startpunkt für den nächsten Euler-Cauchy-Iterationsschritt.
Wie sich die Funktion Z bzw. ihr Graph allerdings zwischen den Punkten A und B genau
verhält, bleibt unbekannt und könnte nur durch eine Verfeinerung der Schrittweite
näherungsweise ermittelt werden; dadurch würde sich jedoch auch der Prognosepunkt B
ändern.
... manchmal aber auch nicht ...
Unglücklicherweise braucht die fragliche Funktion Z
natürlich im betrachteten Zeitintervall dt nicht
annähernd linear zu sein (vgl. Skizze).

MODUL: Grundlagen der Modellbildung 26
Beispiel nach Euler-Cauchy
Das folgende konkrete Beispiel zeigt, wie schnell das Euler-Cauchy-Verfahren durch den
Verfahrensfehler zu im Grunde unbrauchbaren Prognosewerten führen kann.
Gegeben sei die
DifferentialgleichungZ'(t) = Z(t) + t - 1 mit
Anfangswert Z(0) = 1.
Die hier zur Verdeutlichung gewählte
Schrittweite dt=0,25 ist allerdings untypisch
groß - üblich wäre etwa dt=0,1 mit spürbarem
Genauigkeitsgewinn.
Prognose nach Euler-Cauchy:
m(0) = Z'(0) = Z(0) + 0 - 1 = 1-1 = 0
Z(0,25) = Z(0)+m(0)dt = 1 + 0 = 1
m(0,25) = Z'(0,25) = 0,25
Z(0,5)=Z(0,25)+m(0,25)dt=1,0625
m(0,5) = Z'(0,5) = 0,5625
Z(0,75)=Z(0,5)+m(0,5)dt=1,203125
m(0,75) = Z'(0,75) = 0,953125
Z(1)=Z(0,75)+m(0,75)dt=1,4414...,
und damit weicht der "Euler-Cauchy-
Prognosewert" nach nur 4 Schritten bereits um
ca. 0,28 vom exakten Wert ab (gemessen an
der tatsächlichen Zunahme beträgt die
Wachstums- Fehlerquote also bereits ca. 39%).
Verfahrensfehler/Rundungsfehler Man versuchtdurch eine Verkleinerung der
Schrittweite bzw. des Zeitintervalls dt zu vermindern. Dieser Verfahrensfehler wird zwar
umso kleiner, je kleiner die Schrittweite dt gewählt wird, andererseits führt aber die
Verkleinerung von dt zu einem höheren Rechenaufwand, und damit nimmt die Gefahr von
spürbaren Rundungsfehlern erheblich zu, denn Computer rechnen bekanntlich nur mit einer
endlichen Stellenzahl. Dies gilt in besonderem Maße für periodische Abläufe, so dass hier
leicht der Eindruck eines chaotischen Verhaltens entstehen kann.
Insgesamt ist festzustellen, dass sich der Gesamtfehler beim Euler-Cauchy-Verfahren bei
jeder festen Schrittweite dt mit zunehmender Schrittanzahl n sehr schnell spürbar vergrößern
kann. Wegen der Größenordnung des Fehlers und der damit einhergehenden schnellen
Fehlervergrößerung wendet man bei kontinuierlichen Systemen nicht das Euler-Cauchy-
Verfahren, sondern das Runge-Kutta-Verfahren (in der Regel 4.Odnung) an.
Exakte analytische Berechnung
Das gegebene Anfangswertproblemhat die
LösungsfunktionZ(t) = et - t , also ist der
exakte Funktionswert
Z(1) = e - 1 = 1,71828...
Graphische Darstellung des(einfachen)
Euler-Cauchy-Verfahrensmit eingetragener
Lösungsfunktion

MODUL: Grundlagen der Modellbildung 27

MODUL: Grundlagen der Modellbildung 28
Das Runge-Kutta Verfahren (aushttp://www.kohorst-lemgo.de/modell/runge.htm)
Aufgabe:
Von einer Zustandsgröße Z seien bekannt:
der aktuelle Wert Z(t0) zum Zeitpunkt t0, d.h. anschaulich: ein Punkt A(t0;Z(t0)).
eine Differentialgleichung Z'(t) = f(t;Z(t)) für die momentane Änderungsrate Z'(t) bzw. für
die Steigung m = m(t) = Z'(t) zu einem beliebigen Zeitpunkt t .
Gesucht ist nun ein Prognosewert P(t0 + dt) für den leider unbekannten tatsächlichen Wert Z(t0 +
dt) nach einer gewissen Zeitspanne dt.
Verfahren –Verbesserung des Euler-Cauchy-Verfahrens
Aus den obigen Angaben (Punkt A und Steigung m = m(t0)
im Punkt A ) lässt sich mit Hilfe des Steigungsdreiecks eine
lineare Funktion P ermitteln, , deren Wert P(t0+dt) nach
dem Euler-Cauchy-Verfahren als Prognosewert für Z(t0+dt)
dient.
Aufbauend auf dem Euler-Cauchy-Verfahren kann man - so
Runge-Kutta - den gesuchten Prognosewert nur dadurch grundsätzlich verbessern, dass man den für
die lineare Fortschreibung Z(to+dt) = Z(to) + m(to)*dt benutzten Steigungswert m nicht nur aus der
anfänglichen Steigung Z'(to) bestimmt, sondern von dem (mittels der gegebenen Differentialgleichung
bekannten) weiteren Steigungsverhalten der Funktion Z abhängig macht, indem man zunächst mit
einer gewissen Teil-Schrittweite "Hilfsprognosen" erstellt und schließlich die dabei gewonnenen
"Hilfssteigungen" passend mittelt.
Das Runge-Kutta-Verfahren 4.Ordnung verwendet dabei "Halbschritte" im Zeitintervall dt und
gewinnt dadurch 4 "Hilfssteigungen" m1, m2, m3, m4, deren gewichtetes arithmetisches Mittel m = 1/6*(m1+2m2+2m3+m4) dann die zur linearen Fortsetzung der Funktion Z benutzte Steigung
darstellt. Durch die doppelte Gewichtung der beiden "mittleren Hilfssteigungen" m2 und m3 wird
dabei i.A. ein durchaus spürbarer zusätzlicher Genauigkeitsgewinn erzielt.
Beispiel nach Runge-Kutta (verbessertes Euler-Cauchy)
Gegeben sei die Differentialgleichung Z'(t) = Z(t) + t - 1 mit Anfangswert Z(0) = 1 und gewählten
(untypisch großen) Schrittweite dt=1.
Mit m1=Z'(to) als 1. Hilfssteigung wird zunächst ein "Euler-
Halbschritt" gemacht. Dadurch erhält man einen
1. Prognosehilfswert Z1 = Z(to) + m1*0,5dt.
m1 = Z'(0) = Z(0)+0-1 = 0
Z1 = Z(0)+m1*0,5dt = 1+0*0,5 = 1
Punkt P1(to+0,5dt;Z1) sei ein Punkt des Graphen der gesuchten
Funktion Z, und errechnet die zugehörige Steigung als 2.
Hilfssteigung m2 = f ( to+ 0,5dt ; Z1 ).
m2 = Z'(0+0,5dt) = Z1+(0+0,5dt)-1 = 0,5
Mit dieser Hilfssteigung m2 führt man nun den ersten "Euler-
Halbschritt" erneut durch und erhält daraus einen
2. Prognosehilfswert Z2 = Z(to) + m2*0,5dt.
Z2 = Z(0)+m2*0,5dt = 1+0,5*0,5 = 1,25

MODUL: Grundlagen der Modellbildung 29
Wieder unterstellt man, der Punkt P2(to+0,5dt;Z2) sei ein Punkt
des Graphen der gesuchten Funktion Z,und errechnet durch
Einsetzen des Punktes P2 in die gegebene Differentialgleichung die
zugehörige Steigung als
3. Hilfssteigung m3 = f ( to+ 0,5dt ; Z2 ).
m3 = Z'(0+0,5dt)=Z2+(0+0,5dt)-1 = 0,75
Mit dieser Hilfssteigung m3 führt man nun einen ganzen "Euler-
Schritt" durch und erhält einen
3. Prognosehilfswert Z3 = Z(to) + m3*dt
Z3 = Z(0)+m3*dt = 1+0,75*1 = 1,75
sowie - wieder durch Einsetzen des als Kurvenpunkt interpretierten
Punktes P3(to+dt;Z3) in die gegebene Differentialgleichung - die
zugehörige Steigung als
4. Hilfssteigung m4 = f ( to+ dt ; Z3 ).
m4 = Z'(0+dt) = Z3+(0+dt)-1 = 1,75
Aus den so berechneten 4 Hilfssteigungen m1,m2,m3,m4 wird nun
das gewichtete arithmetische Mittel
m = 1/6*( m1+2m2+2m3+m4 )
berechnet, das dann als Prognosesteigung bei der linearen
Fortsetzung der Funktion Z benutzt wird.
m = 1/6*(m1+2m2+2m3+m4) = 0,70833...
Man erhält so beim
Runge-Kutta-Verfahren 4.Ordnung den
Prognosewert Z(to+dt) = Z(to) + m * dt.
Der zugehörige Punkt B( to+dt ; Z(to+dt ) wird als der
gesuchte "nächste" Kurvenpunkt prognostiziert und dient als
Startpunkt für den nächsten Runge-Kutta-Iterationsschritt.
also ist der "Runge-Kutta-Prognosewert"
Z(1) = Z(0+dt)=Z(0)+m*dt=1+m= 1,70833...
Wie sich die Funktion Z bzw. ihr Graph allerdings zwischen den
Punkten A und B genau verhält, bleibt unbekannt.
Fehlerüberlagerung Die Theorie lehrt, dass (für dt< 1)
dieser Verfahrensfehler bei Verwendung des Euler-Cauchy-
Verfahrens von der Größenordnung (dt)2, beim Runge-Kutta-
Verfahren dagegen lediglich von der Größenordnung (dt)5 ist.
Man kann also Fehler prinzipiell nicht vermeiden, und es bleibt
obendrein unklar, in welcher Weise Verfahrens- und Rechen-
bzw. Rundungsfehler den Gesamtfehler vergrößernd oder
verkleinernd beeinflussen. Es ist vielmehr durchaus möglich,
dass sich die Fehler bis zu ersichtlich unsinnigen
Rechenergebnissen verstärken. Dies gilt in besonderem Maße
für periodische Abläufe, so dass hier leicht derEindruck eines
chaotischen Verhaltens entstehen kann, obwohl dieses in der
Realität gar nicht vorliegt.

MODUL: Grundlagen der Modellbildung 30
Prozess „Aufladen eines Kondensators“
Aufgabe: Ein Kondensator wird über einen Widerstand R durch eine Spannungsquelle
U0 aufgeladen. In dieser Reihenschaltung gilt: U0 = UR + UC. Die Stromstärke wird
durch den ohmschen Widerstand bestimmt.
(Parameter: C = 4∙10-6
F; R = 100 kΩ; U0 =12 V)
Erstellen Sie ein geeignetes Modell für die Ladung Q und Stromstärke I während des
Ladevorganges (Flussdiagramm, Zustandsgleichungen …).
Wortmodell Die Ladung beschreibt den Zustand des Kondensators.
Die Änderungsrate ist der Stromfluss.
Der Stromfluss wird durch die Spannung URbestimmt:I = UR/R
Die Spannung UR ergibt sich nach UR = U0- UC
Die Spannung UC wird durch die Ladung und Kapazität bestimmt: Q/C
Wirkungsdiagramm
Flussdiagramm
Zustandsgleichungen
Ladung Strom
Spannung UR Kapazität Widerstand
Ladung
dQ
R UC C
UR
Spannung UC
Spannung U0
U0

MODUL: Grundlagen der Modellbildung 31
Prozess „Entladen eines Kondensators“
Aufgabe: Ein Kondensator wird über einen ohmschen Widerstand entladen. Dabei
nimmt die Ladung auf den Kondensatorplatten ab, da ein Strom 𝐼 =𝑈
𝑅 fließt.
Es gilt 𝐼 =𝑑𝑄
𝑑𝑡und 𝑈 =
𝑄
𝐶.
(Parameter: C = 4∙10-6
F; R = 10 kΩ; Q = 4,8∙10- 5
C)
Erstellen Sie ein geeignetes Modell (Flussdiagramm, Zustandsgleichungen …).
Wortmodell Die Ladung beschreibt den Zustand des Kondensators.
Die Änderungsrate ist der Stromfluss.
Der Stromfluss wird durch die Spannung U = Q/C und den Widerstand R nach
I = U/R bestimmt.
Wirkungsdiagramm
Flussdiagramm
Zustandsgleichungen
Ladung t = Ladung t-1 + (-dQ)*dt
Startwert Ladung = 4,8E-5
Zustandsänderung dQ = I = U/R
Parameter C = 4E-6
R = 10000
Zwischenwerte U = Ladung/C
Hinweis: Endzeit 0,5 Zeitintervall dt = 0,005
Ladung Strom
Spannung
Kapazität
Widerstand
Ladung
dQ
R
U C

MODUL: Grundlagen der Modellbildung 32
Prozess „Einschalten einer Spule“
Aufgabe: Erstellen Sie ein geeignetes Modell für die Stromstärke I während des
Einschaltvorganges (Flussdiagramm, Zustandsgleichungen …).
(Parameter: L = 50 H; R = 1000 Ω; U0 =10 V)
Finden Sie selbstständig die physikalischen Gleichungen, die diesem Vorgang
zu Grunde liegen.
Wortmodell Der Strom durch die Spule beschreibt den Zustand der Spule (Energieinhalt).
Die Änderungsrate ist wird durch die Spannung an der Spule und die
Induktivität bestimmt.
Die Spannung an der Spule lässt sich aus U0 und UR = R*I ermitteln
Wirkungsdiagramm
Flussdiagramm Zustandsgleichungen
Strom dI
Spannung UL Induktivität Spannung UR
Spannung U0
Widerstand R

MODUL: Grundlagen der Modellbildung 33
Prozess „Ausschalten einer Spule“
Aufgabe: Erstellen Sie ein geeignetes Modell für die Stromstärke I während des
Ausschaltvorganges (Flussdiagramm, Zustandsgleichungen …).
(Parameter: L = 5 H; R = 100 Ω)
Finden Sie selbstständig die physikalischen Gleichungen, die diesem Vorgang
zu Grunde liegen.
Wortmodell Der Strom beschreibt den Zustand der Spule (Energieinhalt).
Die Änderungsrate des Stromes wird durch Spannung und Induktivität
bestimmt.
Die Spannung U ist vom Widerstand R und dem Stromfluss U = R*I abhängig.
Wirkungsdiagramm
Flussdiagramm/Zustandsgleichungen
Strom dI
Spannung Widerstand Induktivität

MODUL: Grundlagen der Modellbildung 34
Modelltyp 4 – Schwingende Systeme
Dieser Modelltyp ähnelt Modelltyp 2. Jedoch erfolgt eine
Rückkoppelung von C auf A. Damit die Anordnung schwingen
kann, muss die Rückkoppelung natürlich negativ (A = -C) sein.
Negative Rückkoppelungen (Umkehrung des Wirkungssinns) sind
die Grundlage aller Regelungen.
Merke: • positive Rückkopplungen: gleiche Beziehungen:
- je mehr, desto mehr bzw. je weniger, desto weniger
- nur positive Beziehungen: Aufschaukeln
• negative Rückkopplungen: ungleiche Beziehungen:
- je mehr, desto weniger bzw. je weniger, desto mehr
- ungerade Zahl von negativen Rückkopplungen: Regelkreis
Ergebnis ist ein harmonischer Schwinger, wenn als Integrations-
verfahren Runge-Kutta gewählt wurde. Stellt man stattdessen Euler
als Integrationsverfahren ein, ergibt sich ein Aufschaukeln der
Schwingung. Dieses Aufschaukeln ist nur auf die Integrationsfehler
zurückzuführen, denn dass dieses Modell eine harmonische
Schwingung ergeben muss, dürfte einleuchten.
Flussdiagramm Zeitdiagramm
Zustandsgleichungen Phasendiagramm
Modelltyp 4
A B C
Bt:= Bt-1 + At∙dt
Ct:= Ct-1 + Bt∙dt
At:= – c ∙ Ct-1
𝑦 = a ∙ sin(𝑥)
Räuber-Beute-System,
Federpendel,
elektrischer
Schwingkreis

MODUL: Grundlagen der Modellbildung 35
Führen wir eine weitere Rückkoppelung von B auf A ein, stellt das Modell eine gedämpfte
Schwingung dar.
Flussdiagramm Zeitdiagramm
Zustandsgleichungen Phasendiagramm

MODUL: Grundlagen der Modellbildung 36
Beispiele zu Modelltyp 4
1. Prozess „Federschwinger“
Die Differentialgleichung der freien ungedämpften Schwingung lautet:
𝑚 ∙ 𝑥 𝑡 + 𝐷 ∙ 𝑥 𝑡 = 0 bzw. 𝑚 ∙ 𝑥 𝑡 = −𝐷 ∙ 𝑥 𝑡
Die Differentialgleichung der freien gedämpften Schwingung lautet:
𝑚 ∙ 𝑥 𝑡 + 𝑘 ∙ 𝑥 𝑡 + 𝐷 ∙ 𝑥 𝑡 = 0 bzw. 𝑚 ∙ 𝑥 𝑡 = − 𝑘 ∙ 𝑥 𝑡 + 𝐷 ∙ 𝑥 𝑡
Vergleichen Sie die Differentialgleichungen mit den Zustandsgleichungen.
2. Prozess „Das Fadenpendel“
Erstellen Sie für dasFadenpendel ein geeignetes Modell.
3. Prozess „Der elektromagnetische Schwingkreis“
Erstellen Sie für den elektromagnetischen Schwingkreis ein geeignetes Modell.
I. Wir beginnen beim Kondensator: Sein Zustand ist durch die Ladung gekennzeichnet. Daher
wird Q unsere erste Zustandsgröße. Vom Kondensator fließt Ladung ab. Zu beachten ist, dass
es sich hierbei immer um die erste Ableitung handelt.
II. Ladung und Kapazität des Kondensators bestimmen die Spannung am Kondensator UC.
III. Die erste Ableitung der Ladung nach der Zeit ist die Stromstärke I. Zur besseren Darstellung
im Diagramm rechnen wir diese noch in Milliampere um. Da deren erste Ableitung ebenfalls
eine Rolle spielt, ist auch das eine Zustandsgröße (Rechteck).
IV. Der Stromfluss führt zu einem Spannungsabfall am Widerstand. Wie groß UR ist hängt auch
vom elektrischen Widerstand R ab.
V. Die Differenz von UR und UC ist UL: Die Spannung an der Spule.
VI. Diese Spannung ist eine Induktionsspannung, die zusammen mit der Induktivität der Spule für
eine mehr oder weniger schnelle Änderung der Stromstärke sorgt. Beachten Sie, dass es sich
dabei um einen Zuwachs handelt.
VII. Startwert: Q = 4*10-5
C

MODUL: Grundlagen der Modellbildung 37

MODUL: Grundlagen der Modellbildung 38
Prozess „Elektromagnetischer Schwingkreis“
Aufgabe: Erstellen Sie für den elektromagnetischen Schwingkreis ein geeignetes Modell.
Wortmodell Der Strom beschreibt den Zustand der Spule (Energieinhalt). Die Ladung
beschreibt den Zustand des Kondensators (Energieinhalt). Die Änderungsrate
des Stromes wird durch die Induktivität und die Spannung an der Spule
bestimmt. Die Spannung der Spule ist gleich der Kondensatorspannung. Die
Spannung am Kondensator wird durch dessen Ladung und Kapazität bestimmt.
Wirkungsdiagramm
Flussdiagramm/Zustandsgleichungen
Zeitdiagramm
Strom dI
Spannung UC
Spannung UR
Induktivität
Ladung
Spannung UL
Kapazität Widerstand

MODUL: Grundlagen der Modellbildung 39
Modelltyp 5 – Schwingende Systeme
Mit Hilfe des Modelltyps 5 lassen sich logistische
Wachstumsvorgänge darstellen – Wachstumsvorgänge, die nicht
exponentiell gegen Unendlich wachsen, sondern sich asymptotisch
einem Endwert annähern.
Folgende Gleichung stellt die Lösung für eine solche s-förmige
Kurve dar:
f x =b
1+e(x-c)
a
+d
Dabei haben die Parameter folgende Wirkungen:
Horizontale Dehnung a > 1
Horizontale Stauchung 0 < a < 1
Spiegelung an der y-Achse a = -1
Vertikale Dehnung b > 1
Vertikale Stauchung 0 < b < 1
Spiegelung an der x-Achse b = -1
Verschiebung nach rechts / links c > 0 / c < 0
Verschiebung nach oben / unten d > 0 / d < 0
Beispiele für diesen Modelltyp sind alle logistischen Wachstumsvorgänge, Ausbreitung einer
Krankheit oder auch das Verhalten von Regelstrecken höherer Ordnung.
Mit diesem Modelltyp ließe sich ein einfaches Modell für die Ausbreitung von Krankheiten
entwickeln. Zustand A sollen die Gesunden, Zustand C die Kranken darstellen. Die
Änderungsrate B soll die Infektionen, beeinflusst durch die Zahl der Kranken und die Zahl
der Gesunden, abbilden. Im einfachsten Fall wären nach Ablauf der Simulation aus allen
Gesunden Kranke geworden.
Beispiel 1
Modelltyp 5
A B C
At := At-1 – Bt-1∙dt
Ct := Ct-1 + Bt-1∙dt
Bt:= At ∙ Ct ∙ const
y=b
1+e x-c
a
+d
logistisches Wachstum,
Ausbreitung einer
Krankheit

MODUL: Grundlagen der Modellbildung 40
Beispiel 2: Darstellung von Ansteckungsvorgängen (Krankheiten) in abgeschlossenen
Populationen
Beschreibung: Der angesteckte Teil einer Population hat Kontakte mit dem noch nicht
angesteckten Teil. Die Infektionsrate hängt von der Zahl der Infizierten, der Zahl der noch
Infizierbaren, der Häufigkeit von Kontakten und der Zahl der Infektionen pro Kontakt ab. Bei
einem Teil der Kontakte erfolgt Ansteckung, die den noch nicht angesteckten
Bevölkerungsteil entsprechend verringern, bis schließlich alle potentiell Infizierbaren erreicht
worden sind.

MODUL: Grundlagen der Modellbildung 41
1.4 Nachweis der Modellgültigkeit
Ob ein Modell richtig ist, lässt sich im Allgemeinen nicht beweisen. Bestenfalls lässt sich die
Gültigkeit des Modells für den vorgegebenen Zweck nachweisen. Die Gültigkeit hat in
diesem Zusammenhang vier verschiedene Aspekte, die jeweils verschiedene
Gültigkeitsprüfungen verlangen.
Strukturgültigkeit:
Um die Strukturgültigkeit nachzuweisen, muss gezeigt werden, dass die Struktur des Modells
den Strukturbeziehungen des realen Prozesses entspricht und dass die Strukturbeziehungen,
die für den Zweck der Prozessstudie Bedeutung haben, tatsächlich auch im Modell vorhanden
sind.
Verhaltensgültigkeit:
Um Verhaltensgültigkeit nachzuweisen, muss gezeigt werden, dass für die gesamte Menge
der möglichen Anfangsbedingungen und Umwelt-einflüsse, die im realen Prozess anzutreffen
sind, der Modellprozess das gleiche dynamische Verhalten wie der reale Prozess erzeugt.
Empirische Gültigkeit:
Um empirische Gültigkeit nachzuweisen, müssen die empirischen oder logischen Ergebnisse
über das relevante Verhaltensspektrum des Modells mit den empirischen Daten des realen
Prozesses verglichen werden und mit diesen weitgehend übereinstimmen. Wo empirische
Daten nicht verfügbar sind, müssen die Modellergebnisse mindestens auf Plausibilität und
Konsistenz überprüft werden.
Anwendungsgültigkeit:
Um Anwendungsgültigkeit nachzuweisen, muss gezeigt werden, dass die Modelldarstellung
dem Zweck der Prozessstudie entspricht und dass das Modell die Art von Informationen
erzeugen kann, die von ihm erwartet wird.

MODUL: Grundlagen der Modellbildung 42
Grundlegende Modelltypen
Kausaldiagramm
Flussdiagramm
Modellgleichungen
typischer Verlauf des Graphen
Fallbeispiele
Darstellung in einer Matrix Vermittlung eines ersten Gespürs für
kausale Zusammenhänge
Schritte der Modellbildung
reales System beobachten und analysieren
Problembeschreibung
Wortmodell
Wirkungsplan
Flussdiagramm
Simulation erstellen
Modelltest
Kausaldiagramm, dimensionale Analyse
je nach verwendetem Programm mit unterschiedlichen Notationen
Verifikation, evtl. Modellverbesserung
Simulation durch Anwendungssoftware
z. B. Boris, PowerSim, Dynasys, Stella,
ithink, Vensim, …
Modellbildung, Anwendung
Planung der Vorgehensweise
Recherche und Beschaffung von Daten
Erstellung des Modells Dokumentation, Präsentation und Bewertung der
Ergebnisse
Gültigkeitsprüfung
Strukturgültigkeit
Verhaltensgültigkeit
empirische Gültigkeit
Anwendungsgültigkeit
Planung eines umfangreicheren Vorhabens
Modelle aus der Physik (schiefer Wurf mit
und ohne Berücksichtigung der Luftreibung) nichttechnische Modelle (Bevölkerungsentwicklung
o. ä.)
Erstellung von Modellen je nach Simulationsprogramm Einsatz in anderen Klassen und Jahrgangsstufen
im Unterricht

MODUL: Grundlagen der Modellbildung 43
Quellennachweis
Wolfgang Eiden, Markus Heidenreich: Modellierung und Simulation dynamischer Systeme
mit DYNASYS-Anwendungsbeispielen; Februar 1999