计算机控制系统 高金源 夏洁
DESCRIPTION
计算机控制系统 高金源 夏洁. 北京航空航天大学 清华大学出版社 2006 年 11 月. 《 计算机控制系统 》. 依 < 全国高等学校自动化专业系列教材编审委员会 > 审定的教材大纲编写。 主编人:高金源 夏洁 出版发行:清华大学出版社. 3.1 离散系统时域描述 —— 差分方程 3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述 3.6 离散系统的状态空间描述 3.7 应用实例. 3.1.1 差分的定义. 简写. 连续函数 ,采样后为. 一阶向前差分:. - PowerPoint PPT PresentationTRANSCRIPT
计算机控制系统计算机控制系统高金源 夏洁高金源 夏洁
北京航空航天大学 清华大学出版社北京航空航天大学 清华大学出版社20062006 年年 1111 月月
北京航空航天大学 清华大学出版社 2
《计算机控制系统》《计算机控制系统》
• 依 < 全国高等学校自动化专业系列教材编审委员会 > 审定的教材大纲编写。
• 主编人:高金源 夏洁• 出版发行:清华大学出版社
北京航空航天大学 清华大学出版社 3
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述3.7 应用实例

北京航空航天大学 清华大学出版社 4
3.1.1 3.1.1 差分的定义差分的定义• 连续函数 ,采样后为 ( )f t ( )f kT 简写 ( )f k
一阶向前差分:
二阶向前差分:
( ) ( 1) ( )f k f k f k 2 ( ) ( 1) ( )f k f k f k
( 2) 2 ( 1) ( )f k f k f k
n 阶向前差分: 1 1( ) ( 1) ( )n n nf k f k f k
一阶向后差分:
二阶向后差分:
n 阶向后差分: 1 1( ) ( ) ( 1)n n nf k f k f k
( ) ( ) ( 1)f k f k f k
2 ( ) [ ( )] ( ) 2 ( 1) ( 2)f k f k f k f k f k
北京航空航天大学 清华大学出版社 5
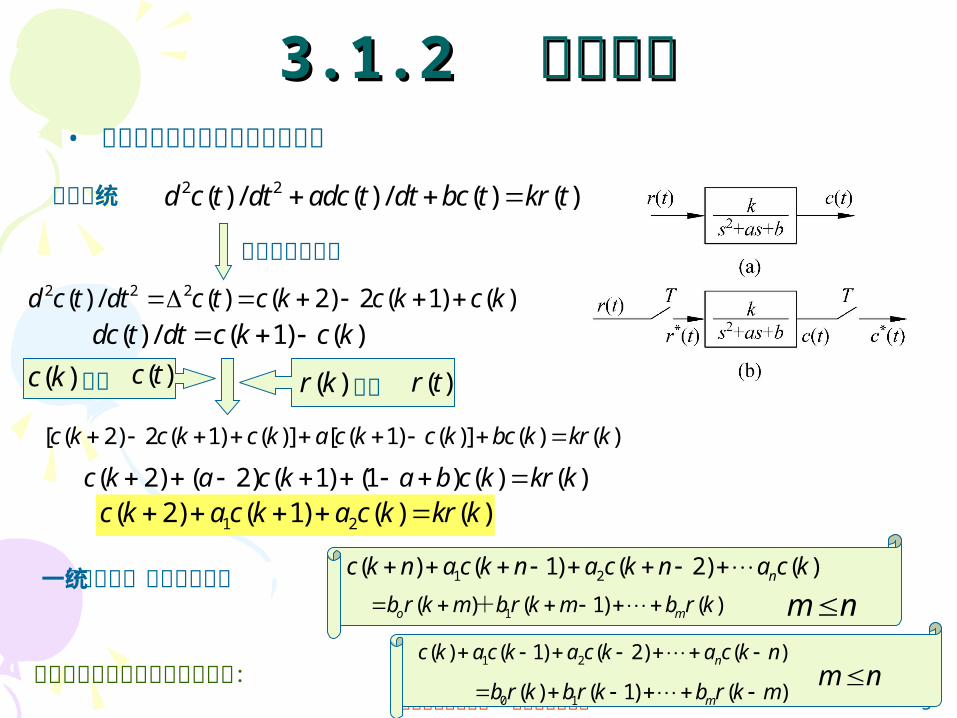
3.1.2 3.1.2 差分方程差分方程• 差分方程是确定时间序列的方程
连续系统 2 2( ) / ( ) / ( ) ( )d c t dt adc t dt bc t kr t
微分用差分代替 2 2 2( ) / ( ) ( 2) 2 ( 1) ( )d c t dt c t c k c k c k
( ) / ( 1) ( )dc t dt c k c k
[ ( 2) 2 ( 1) ( )] [ ( 1) ( )] ( ) ( )c k c k c k a c k c k bc k kr k
( 2) ( 2) ( 1) (1 ) ( ) ( )c k a c k a b c k kr k
1 2( 2) ( 1) ( ) ( )c k a c k a c k kr k
一般离散系统的差分方程: 1 2( ) ( 1) ( 2) ( )nc k n a c k n a c k n a c k
1( ) ( 1) ( )o mb r k m b r k m b r k +
差分方程还可用向后差分表示为:1 2( ) ( 1) ( 2) ( )nc k a c k a c k a c k n
0 1( ) ( 1) ( )mb r k b r k b r k m
m n
m n
( )c k 代替 ( )c t 代替( )r k ( )r t

北京航空航天大学 清华大学出版社 6
3.1.3 3.1.3 线性常系数差分方程的迭代求解线性常系数差分方程的迭代求解• 差分方程的解也分为通解与特解。
– 通解是与方程初始状态有关的解。– 特解与外部输入有关,它描述系统在外部输入作用下的强迫运动。
例 3-1 已知差分方程 ( ) 0.5 ( 1) ( )c k c k r k (0) 0c ( ) 1r k ( )c k,试求
( ) ( ) 0.5 ( 1)c k r k c k
解:采用递推迭代法,有:
1, (1) (1) 0.5 (1 1) 1 0.5 (0) 1k c r c c
2, (2) (2) 0.5 (2 1) 1 0.5 (1) 1 0.5 1.5k c r c c
3, (3) (3) 0.5 (3 1) 1 0.5 (2) 1 0.5 1.5 1.75k c r c c

北京航空航天大学 清华大学出版社 7
例 3-1 采用 MATLAB 程序求解
解序列为: k=0 , 1 ,…, 9 时,
n=10;% 定义计算的点数c(1:n)=0;r(1:n)=1;k(1)=0 ; % 定义输入输出和点数的初值for i=2:n c(i)=r(i)+0.5*c(i-1);k(i)=k(i-1)+1;endplot(k,c,′k:o′) % 绘输出响应图,每一点上用 o 表示
MATLAB 程序:
c=0 , 1.0000 , 1.5000 ,
1.7500 , 1.8750 ,
1.9375 , 1.9688 ,
1.9844 , 1.9922 ,
1.9961 ,…… 差分方程的解序列表示 说明:另一个求解方法是利用 z 变换求解。

北京航空航天大学 清华大学出版社 8
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数3.4 离散系统的方块图分析3.5 离散系统的频域描述3.6 离散系统的状态空间描述3.7 应用实例

北京航空航天大学 清华大学出版社 9
3.2.1 z3.2.1 z 变换定义变换定义1. z 变换
采样信号 0
*( ) ( ) ( )k
f t f kT t kT
0
*( ) [ *( )] ( ) ksT
k
F s L f t f kT e
0
( ) ( ) k
k
F z f kT z
sTz eln /s z T
1ln
*( ) ( )s zT
F s F z
采样信号的 z 变换
注意: z 变换中, z-1 代表信号滞后一个采样周期,可称为单位延迟因子。

北京航空航天大学 清华大学出版社 10
采样脉冲序列进行采样脉冲序列进行 zz 变换的写法:变换的写法:
• 在实际应用中,对控制工程中多数信号, z 变换所表示的无穷级数是收敛的,并可写成闭和形式。
• z 的有理分式:
• z-1 的有理分式 :
• 零、极点形式:
[ *( )], [ ( )], [ ( )], [ ( )]Z f t Z f t Z f kT Z F s
11 1 0
11 1 0
( )( )
m mm
n nn
K z d z d z dF z
z c z c z c
+ + m n
1 11 1 0
1 11 1 0
(1 )( )
1
l m mm
n nn
Kz d z d z d zF z
c z c z c z
+ +
l n m
1
1
( ) ( )( )( )
( ) ( ) ( )m
n
K z z z zKN zF z
D z z p z p
m n

北京航空航天大学 清华大学出版社 11
2. 2. zz 反变换反变换
• 求与 z 变换相对应的采样序列函数的过程称为 z 反变换。
z 反变换唯一,且对应的是采样序列值。 1 *[ ( )] ( ) ( )Z F z f t f kT
1[ ( )] ( )Z F z f t
z 变换只能反映采样点的信号,不能反映采样点之间的行为。

北京航空航天大学 清华大学出版社 12
3.2.2 3.2.2 zz 变换的基本定理变换的基本定理
1 .线性定理2 .实位移定理(时移定理)
(1) 右位移(延迟)定理
(2) 左位移(超前)定理
3 .复域位移定理
1 2[ ( ) ( )] ( ) ( )Z f t f t aF z bF z
[ ( )] ( )nZ f t nT z F z
1
0
[ ( )] ( ) ( )n
n k
k
Z f t nT z F z f kT z
[ ( )] ( )at aTZ e f t F ze

北京航空航天大学 清华大学出版社 13
3.2.2 3.2.2 zz 变换的基本定理变换的基本定理
4 .初值定理
5 .终值定理
若存在极限 lim ( )z
F z
,则有: (0) lim ( )z
f F z
假定函数 ( )F z全部极点均在 z平面的单位圆内或最多有一个极点在 z=1处,则
1
1 1lim ( ) lim(1 ) ( ) lim( 1) ( )k z z
f kT z F z z F z

北京航空航天大学 清华大学出版社 14
3.2.3 3.2.3 求求 zz 变换及反变换方法变换及反变换方法1. z 变换方法
(1) 级数求和法 (根据定义 )例 3-6 求指数函数 的 z 变换 ( ) tf t e
)2()(1)( 2* TteTtetf TT
2211)( zezezF TT
0k
kkT ze
11
1
11||
zeze T
T条件

北京航空航天大学 清华大学出版社 15
利用 s域中的部分分式展开法
1. 1. zz 变换方法变换方法(2) F(s) 的 z 变换
( )f t *( )f t( L反变换) ( )F s )(zF(z 变换 )( 采样 )
例 3-7 试求 的 z 变换。)1(
1)(
sssF
解: 1 1 1( )
( 1) 1F s
s s s s
1 1 1
( ) 11
tf t L es s
(1 )( ) [ ( )] [1 ]
1 ( 1)( )
Tt
T T
z z z eF z Z F s Z e
z z e z z e
另一种由 F(s) 求取 F(z) 的方法是留数计算方法。本书对此不予讨论
1 2
1 2
( ) i n
i n
C CC CF s
s s s s s s s s

北京航空航天大学 清华大学出版社 16
利用 MATLAB软件中的符号语言工具箱进行 F(s) 部分分式展开
已知 ,通过部分分式展开法求 F(z) 。2
2
( 1) ( 3)( )
s
s s sF s
F=sym(′(s+2)/(s*(s+1)^2*(s+3))′) ; % 传递函数 F(s) 进行符号定义[numF,denF]=numden(F) ; %提取分子分母pnumF=sym2poly(numF) ; %将分母转化为一般多项式pdenF=sym2poly(denF) ; %将分子转化为一般多项式[R,P,K]=residue(pnumF,pdenF)% 部分分式展开
MATLAB 程序:
运行结果:R=0.0833-0.7500-0.50000.6667P=-3.0000-1.0000-1.00000K=[](此题无 K值)
对应部分分式分解结果为:
2
1 1 1 1( ) 0.083 3 0.750 0 0.500 0 0.666 7
3 1 ( 1)F s
s s s s

北京航空航天大学 清华大学出版社 17
1. 1. zz 变换方法变换方法(3) 利用 z 变换定理求取 z 变换式
例 3-8 已知 f (t)=sint 的 z 变换
的 z 变换。
解:利用 z 变换中的复位移定理可以很容易得到
2
sin( )
2 cos 1
z TF z
z z T
试求 1( ) sinatf t e t
2 2 2 2
sin sin[ sin ]
2 cos 1 2 cos
aT aTat
aT aT aT aT
e z T e z TZ e t
z e ze T z ze T e
北京航空航天大学 清华大学出版社 18
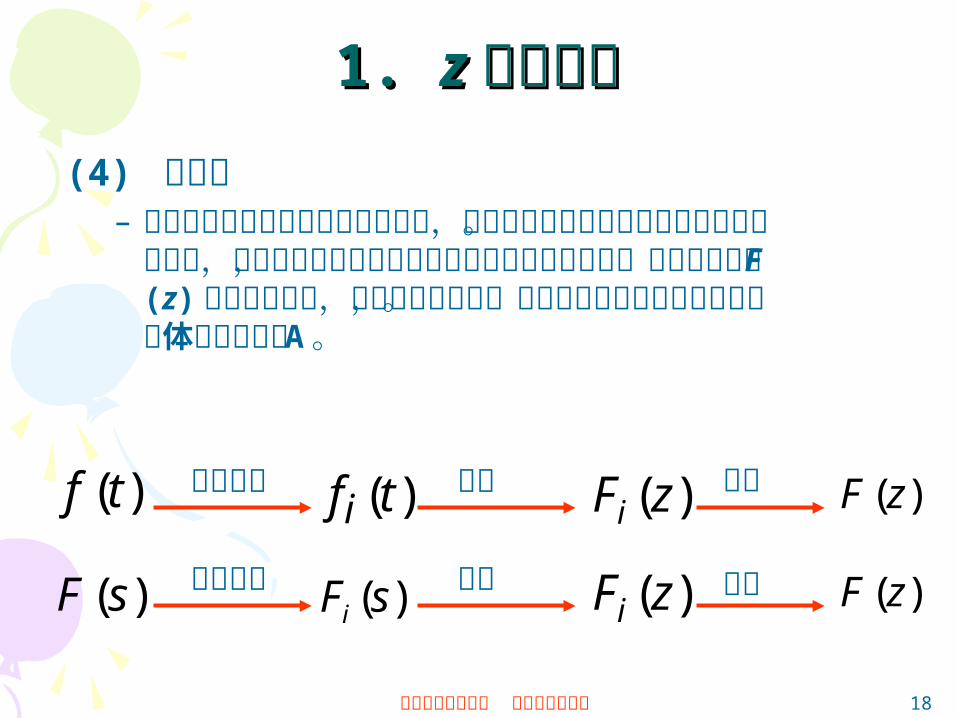
1. 1. zz 变换方法变换方法(4) 查表法
– 实际应用时可能遇到各种复杂函数,不可能采用上述方法进行推导计算。实际上,前人已通过各种方法针对常用函数进行了计算,求出了相应的 F(z) 并列出了表格,工程人员应用时,根据已知函数直接查表即可。具体表格见附录 A 。
部分分式 )(tf )(tfi查表 )(zFi
求和 )(zF
部分分式 查表 )(zFi 求和 )(zF)(sF ( )iF s
北京航空航天大学 清华大学出版社 19
2. z2. z 反变换方法 反变换方法 (1) 查表法
(可以直接从表中查得原函数)– 如已知 z 变换函数 F(z) ,可以依 F(z) 直接从给定的表格中求得它的原函数 f *(t) 。

北京航空航天大学 清华大学出版社 20
2. z2. z 反变换方法反变换方法(2) 部分分式法
(较复杂,无法直接从表格中查其原函数)
1 2
1 2
( ) n
n
AA AF z
z z z z z z z
1 2
1 2
( ) n
n
A zA z A zF z
z z z z z z
部分分式 查表 求和 )(zF )(zFi )(* tfi )(* tf
查表
)(* tf

北京航空航天大学 清华大学出版社 21
部分分式法例子部分分式法例子例 3-9 求下式的 z 反变换 2 2
2 2
3 ( 3 )( )
2 1 ( 1)
z z z zF z
z z z
MATLAB 程序:
Fz=sym(′(-3*z^2+z)/(z^2-2*z+1)′) ; % 进行符号定义F=Fz/′z′ ;[numF,denF]=numden(F) ; %提取分子分母pnumF=sym2poly(numF) ; %将分母转化为一般多项式pdenF=sym2poly(denF) ;[R,P,K]=residue(pnumF,pdenF)% 部分分式展开
2
( ) 2 3
( 1) 1
F z
z z z
2
2 3( )
( 1) 1
z zF z
z z
查表可得 ( ) 2 3 ( )f k k u k 1 0
( )0 0
ku k
k
其中

北京航空航天大学 清华大学出版社 22
2. z2. z 反变换方法反变换方法(3) 幂级数展开法(长除法)
1 2( ) (0) ( ) ( ) ( ) kF z f f T z f zT z f kT z
*( ) (0) ( ) ( ) ( ) (2 ) ( 2 ) ( ) ( )f t f t f T t T f T t T f kT t kT
例 3-10 已知 1
1 2
10( )
1 1.5 0.5
zF z
z z
,求 *( )f t
1 2 3 4( ) 10 15 17.5 18.75F z z z z z
*( ) 0 10 ( ) 15 ( 2 )f t t T t T 17.5 ( 3 ) 18.75 ( 4 )t T t T
对该例,从相关系数中可以归纳得:
*
0
( ) 20(1 0.5 ) ( )k
k
f t t kT

北京航空航天大学 清华大学出版社 23
3.2.4 3.2.4 差分方程差分方程 zz 变换解法变换解法例 3-11 用 z 变换法求差分方程
利用 z 变换求解线性常系数差分方程,将差分方程的求解转换为代数方程的求解
c(k+2)-3c(k+1)+2c(k)=4k
解: (1) 对每一项做 z 变换 2 2[ ( ) (0) (1)] [3 ( ) 3 (0)] 2 ( )4
zz C z z c zc zC z zc C z
z
2 2( 5 6) ( ) (1) (0) 5 (0) /( 4)z z C z zc z c c z z
(2) 归纳整理 2
2 2
(0) (1) 3 (0)( )
( 4)( 3 2) ( 3 2)
z z c zc zcC z
z z z z z
特解 通解
(3) z 反变换 0.166 0.5 0.33
( )4 2 1
z z zC z
z z z
查表得
部分分式展开
( ) (0.166(4) 0.5(2) 0.333)k kc k
假设初始条件为零,上式第 2项为零

北京航空航天大学 清华大学出版社 24
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述 3.7 应用实例
北京航空航天大学 清华大学出版社 25
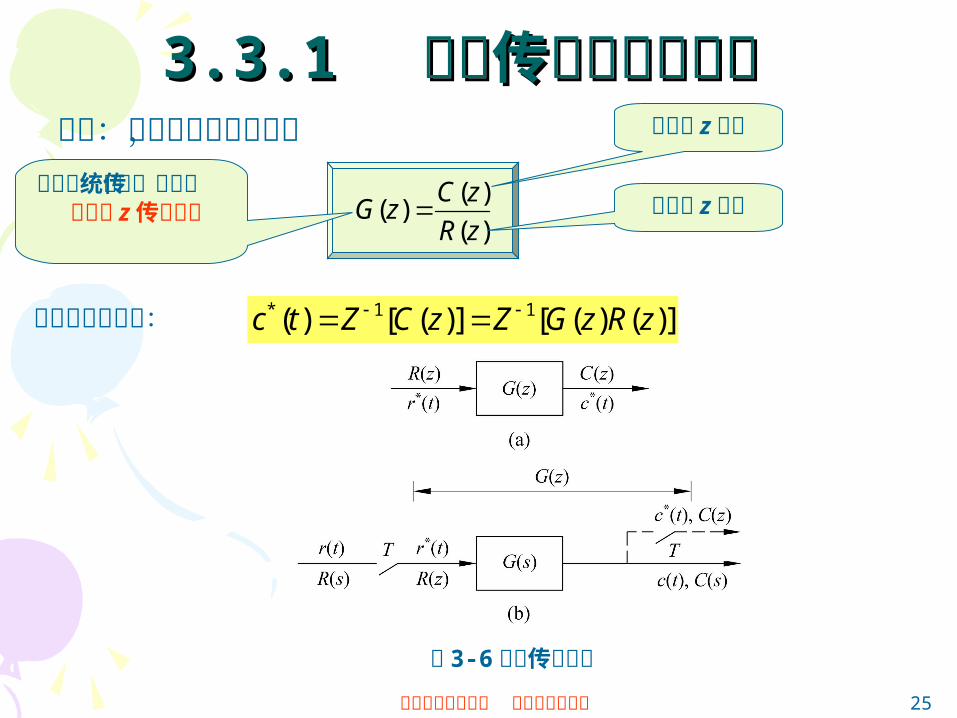
3.3.1 3.3.1 脉冲传递函数的定义 脉冲传递函数的定义 定义:在初始条件为零时,
( )( )
( )
C zG z
R z
离散系统脉冲传递函数
又称为 z 传递函数
输出量 z 变换
输入量 z 变换
输出的采样信号: * 1 1( ) [ ( )] [ ( ) ( )]c t Z C z Z G z R z
图 3-6 脉冲传递函数
北京航空航天大学 清华大学出版社 26
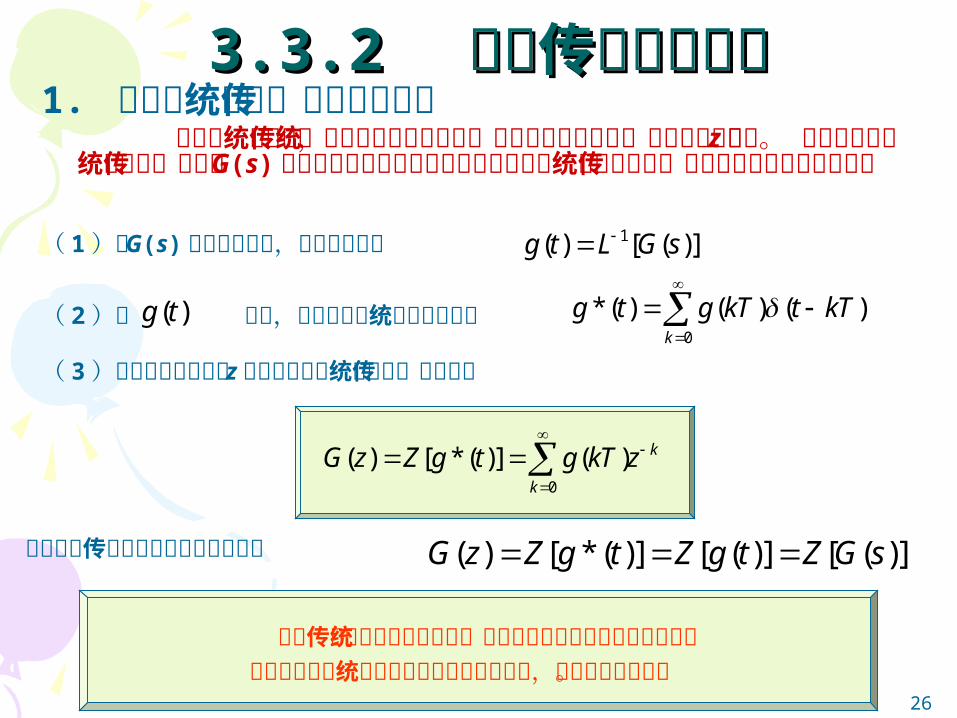
3.3.2 3.3.2 脉冲传递函数特性脉冲传递函数特性1. 离散系统脉冲传递函数的求取 离散系统的脉冲传递函数可以看作是系统输入为单位脉冲时,其脉冲
响应的 z 变换。 若已知采样系统的连续传递函数 G(s) ,当其输出端加入虚拟开关变为离散系统时,其脉冲传递函数可按下述步骤求取:
( 1 )对 G(s)做拉氏反变换,求得脉冲响应 1( ) [ ( )]g t L G s
( )g t( 2 )对 采样,求得离散系统脉冲的响应为0
*( ) ( ) ( )k
g t g kT t kT
( 3 )对离散脉冲响应做 z 变换,即得系统的脉冲传递函数为
0
( ) [ *( )] ( ) k
k
G z Z g t g kT z
几种脉冲传递函数的表示法均可应用 ( ) [ *( )] [ ( )] [ ( )]G z Z g t Z g t Z G s
脉冲传递函数完全表征了系统或环节的输入与输出之间的特性,并且也只由系统或环节本身的结构参数决定,与输入信号无关。
北京航空航天大学 清华大学出版社 27
3.3.2 3.3.2 脉冲传递函数特性脉冲传递函数特性2. 脉冲传递函数的极点与零点
– 极点• 当G(z) 是 G(s)由通过 z 变换得到时,它的极点是 G(s) 的极
点按 z=e-sT 的关系一一映射得到。由此可知, G(z) 的极点位置不仅与 G(s) 的极点有关,还与采样周期 T密切相关。当采样周期 T足够小时, G(s) 的极点都将将密集地映射在 z=1附近。
– 零点• G(z) 的零点是采样周期 T 的复杂函数。采样过程会增加额外
的零点。• 若连续系统 G(s)没有不稳定的零点,且极点数与零点数之差
大于 2 ,当采样周期较小时, G(z)总会出现不稳定的零点,变成非最小相位系统。
• 有不稳定零点的连续系统 G(s) ,只要采样周期取得合适,离散后也可得到没有不稳定零点的 G(z) 。

北京航空航天大学 清华大学出版社 28
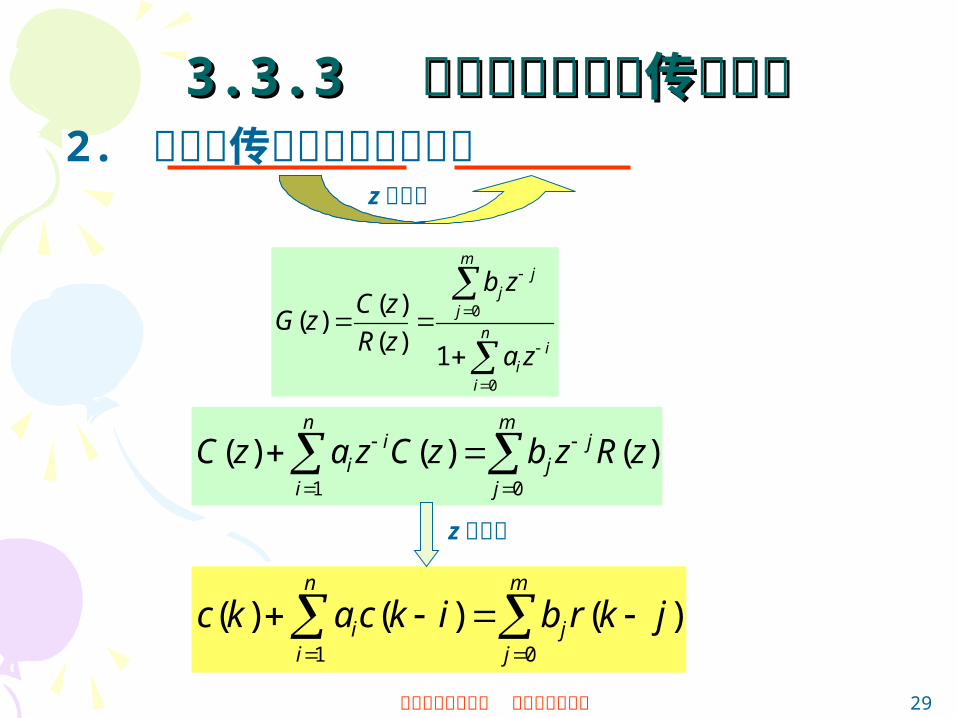
3.3.3 3.3.3 差分方程与脉冲传递函数差分方程与脉冲传递函数1. 由差分方程求脉冲传递函数
已知差分方程 1 0
( ) ( ) ( )n m
i ji j
c k a c k i b r k j
,设初始条件为零。
两端进行 z 变换 1 0
( ) ( ) ( )n m
i ji j
i j
C z a z C z b z R z
脉冲传递函数 0
0
( )( )
( ) 1
mj
jj
ni
ii
b zC z
G zR z a z
系统的特征多项式 1
( ) 1n
ii
i
z a z
系统输出 0
0
( ) ( ) ( ) ( )1
mj
jj
ni
ii
b z
C z G z R z R za z
北京航空航天大学 清华大学出版社 29
3.3.3 3.3.3 差分方程与脉冲传递函数差分方程与脉冲传递函数2. 由脉冲传递函数求差分方程
z 反变换
0
0
( )( )
( ) 1
mj
jj
ni
ii
b zC z
G zR z a z
1 0
( ) ( ) ( )n m
i ji j
i j
C z a z C z b z R z
1 0
( ) ( ) ( )n m
i ji j
c k a c k i b r k j
z 反变换

北京航空航天大学 清华大学出版社 30
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述 3.7 应用实例
北京航空航天大学 清华大学出版社 31
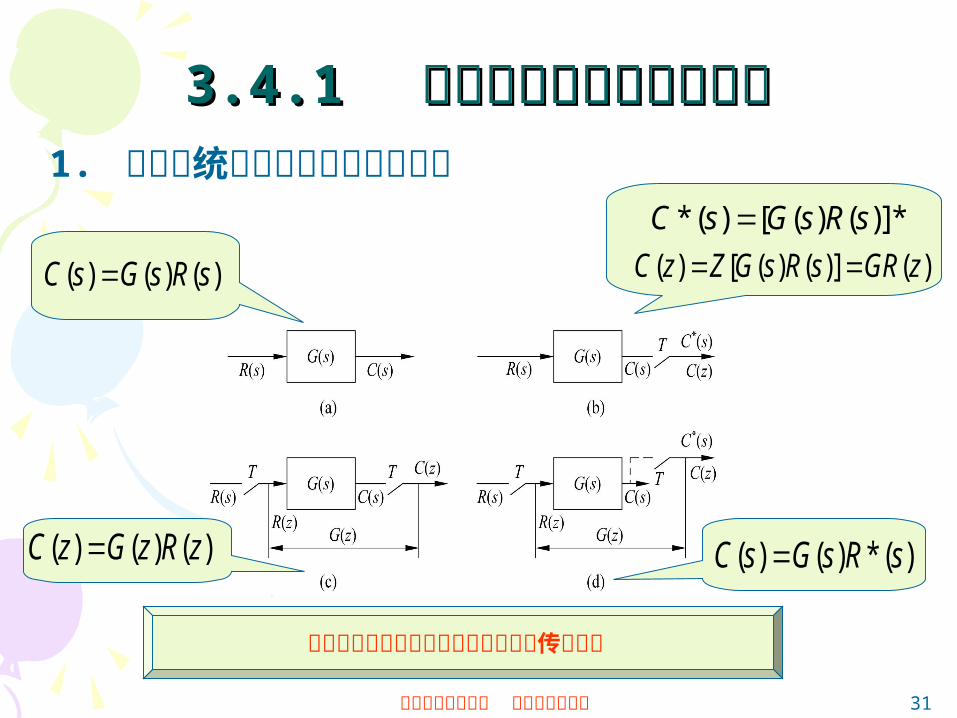
3.4.1 3.4.1 环节串联连接的等效变换环节串联连接的等效变换1. 采样系统中连续部分的结构形式
( ) ( ) ( )C s G s R s
*( ) [ ( ) ( )]*C s G s R s( ) [ ( ) ( )] ( )C z Z G s R s GR z
( ) ( ) ( )C z G z R z ( ) ( ) *( )C s G s R s
并不是所有结构都能写出环节的脉冲传递函数
北京航空航天大学 清华大学出版社 32
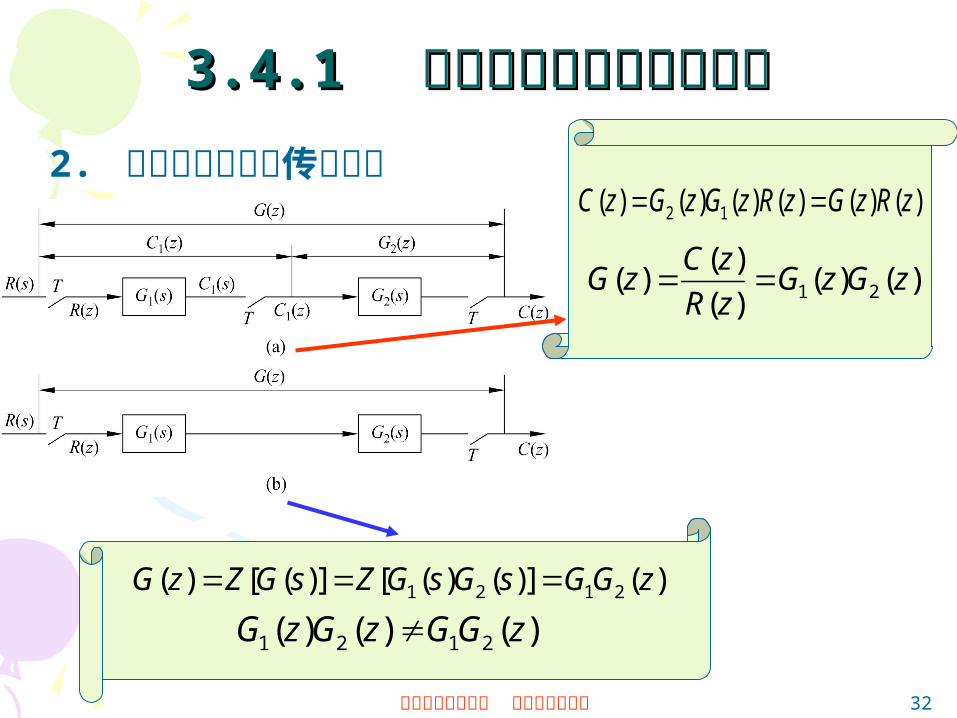
3.4.1 3.4.1 环节串联连接的等效变换环节串联连接的等效变换2. 串联环节的脉冲传递函数
2 1( ) ( ) ( ) ( ) ( ) ( )C z G z G z R z G z R z
1 2
( )( ) ( ) ( )
( )
C zG z G z G z
R z
1 2 1 2( ) [ ( )] [ ( ) ( )] ( )G z Z G s Z G s G s GG z
1 2 1 2( ) ( ) ( )G z G z GG z
北京航空航天大学 清华大学出版社 33
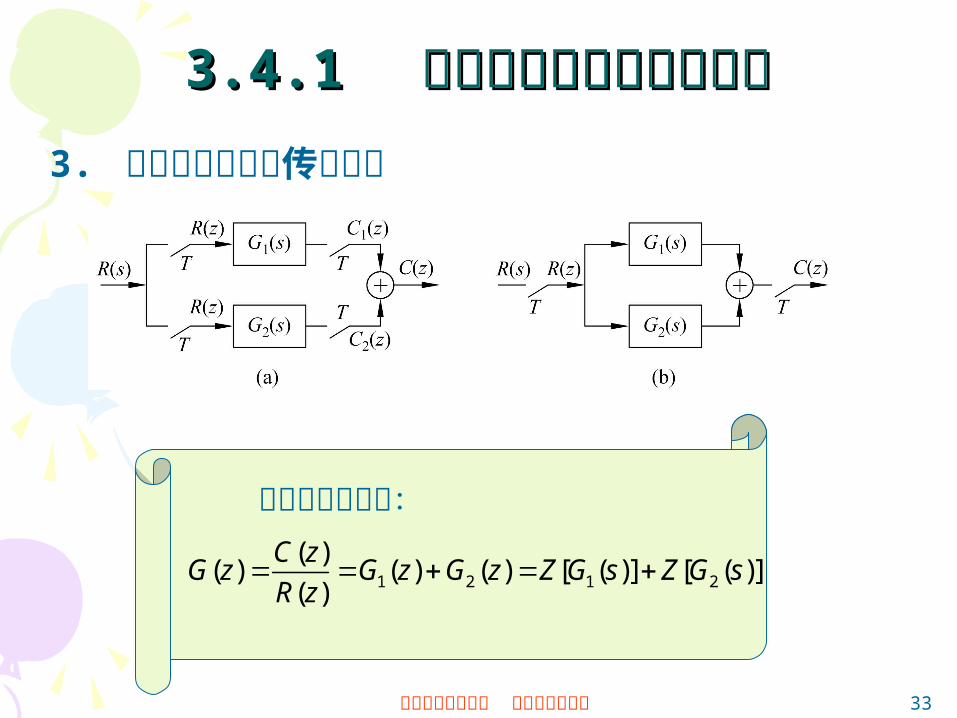
3.4.1 3.4.1 环节串联连接的等效变换环节串联连接的等效变换3. 并联环节的脉冲传递函数
1 2 1 2
( )( ) ( ) ( ) [ ( )] [ ( )]
( )
C zG z G z G z Z G s Z G s
R z
根据叠加定理有:
北京航空航天大学 清华大学出版社 34
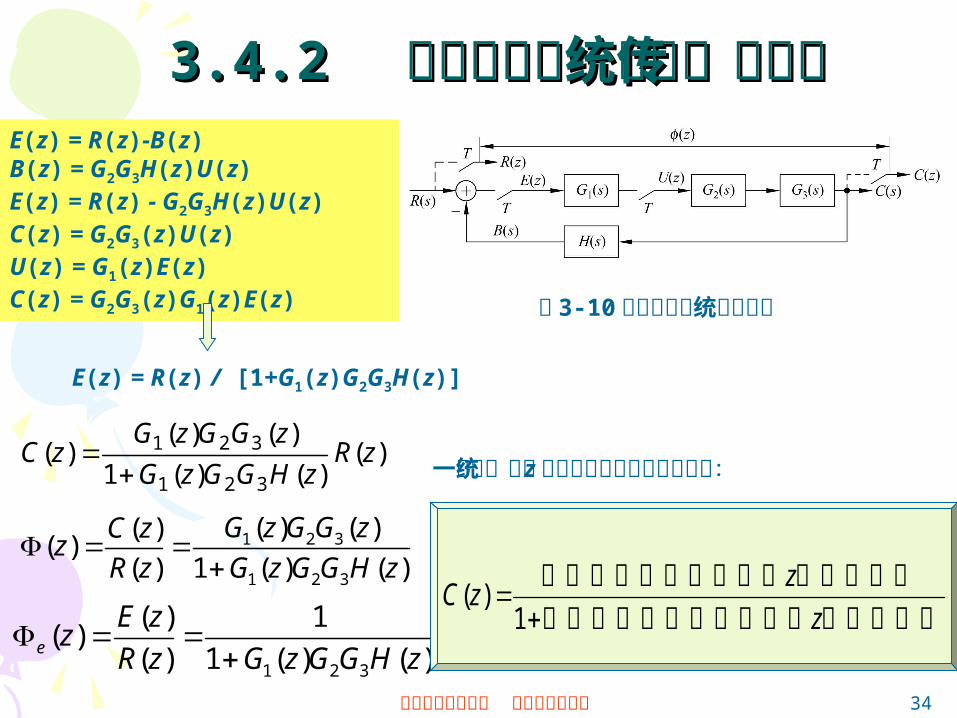
3.4.2 3.4.2 闭环反馈系统脉冲传递函数闭环反馈系统脉冲传递函数
图 3-10 采样控制系统典型结构
E(z) = R(z)-B(z)B(z) = G2G3H(z)U(z)E(z) = R(z) - G2G3H(z)U(z)C(z) = G2G3(z)U(z)U(z) = G1(z)E(z)C(z) = G2G3(z)G1(z)E(z)
E(z) = R(z) / [1+G1(z)G2G3H(z)]
)()()(1
)()()(
321
321 zRzHGGzG
zGGzGzC
1 2 3
1 2 3
( ) ( )( )( )
( ) 1 ( ) ( )
G z G G zC zz
R z G z G G H z
1 2 3
( ) 1( )
( ) 1 ( ) ( )e
E zz
R z G z G G H z
( )1
zC z
z前向通道所有独立环节 变换的乘积闭环回路中所有独立环节 变换的乘积
一般系统输出 z 变换可按以下公式直接给出:

北京航空航天大学 清华大学出版社 35
3.4.3 3.4.3 计算机控制系统的闭计算机控制系统的闭环脉冲传递函数环脉冲传递函数
1. 数字部分的脉冲传递函数• 控制算法,通常有以下两种形式:
– 差分方程 脉冲传递函数 D(z)
– 连续传递函数 脉冲传递函数 D(z)
(z 变换法 )
(第 5章的离散法 )

北京航空航天大学 清华大学出版社 36
3.4.3 3.4.3 计算机控制系统的闭环计算机控制系统的闭环脉冲传递函数脉冲传递函数
2. 连续部分的脉冲传递函数• 计算机输出的控制指令u*(t) 是经过零阶保持器加到系统
的被控对象上的,因此系统的连续部分由零阶保持器和被控对象组成。
)(1
)()( 00 sGs
esGsG
Ts
h
被控对象传递函数 图 3-11 连续部分的系统结构
10 0
( ) 1 1( ) ( ) (1 ) ( )
( )
TsC z eG z Z G s z Z G s
U z s s
北京航空航天大学 清华大学出版社 37
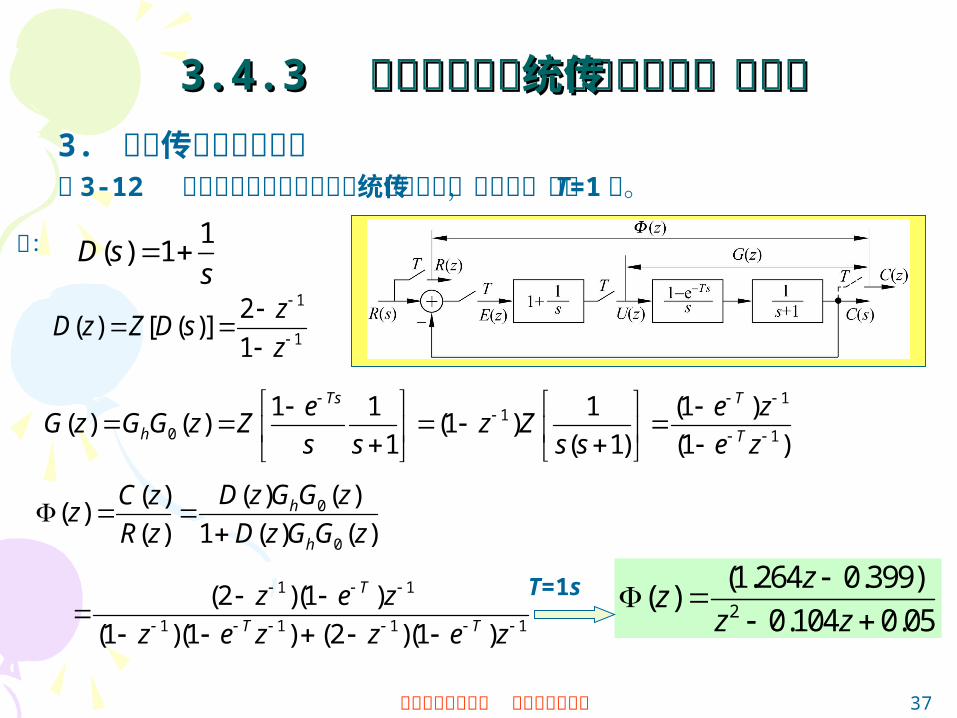
3.4.3 3.4.3 计算机控制系统的闭环脉冲传递函数计算机控制系统的闭环脉冲传递函数3. 闭环传递函数的求取例 3-12 求下图所示计算机控制系统闭环脉冲传递函数,已知 T=1秒。
1( ) 1D s
s 解:
1
1
2( ) [ ( )]
1
zD z Z D s
z
11
0 1
1 1 1 (1 )( ) ( ) (1 )
1 ( 1) (1 )
Ts T
h T
e e zG z G G z Z z Z
s s s s e z
0
0
( ) ( )( )( )
( ) 1 ( ) ( )h
h
D z G G zC zz
R z D z G G z
1 1
1 1 1 1
(2 )(1 )
(1 )(1 ) (2 )(1 )
T
T T
z e z
z e z z e z
2
(1.264 0.399)( )
0.104 0.05
zz
z z
T=1s

北京航空航天大学 清华大学出版社 38
利用利用 MatlabMatlab相应命令进行相应命令进行 ZZ变换变换
c =[0 0.6321]d =[1.0000 -0.3679]
MATLAB命令:
num=[1];den=[1, 1]; [c,d]=c2dm(num,den,0.1, 'zoh')
计算输出
即得到1
1
0.6321 0.6321( )
0.3679 1 0.3679
zG z
z z
1( )
1G s
s

北京航空航天大学 清华大学出版社 39
3.4.4 3.4.4 干扰作用时闭环系统的输出干扰作用时闭环系统的输出• 根据线性系统叠加定理,可分别计算指令信号和干扰信号
作用下的输出响应。
图 3-13 有干扰时的计算机控制系统
R(s)单独作用时的系统输出 [N(s)=0]
干扰单独作用时的系统输出 [R(s)=0]
共同作用时的系统输出
( ) ( ) ( )( )
1 ( ) ( )R
R z D z G zC z
D z G z
2 ( )( )
1 ( ) ( )N
NG zC z
D z G z
)()(1
)( 21 sGsGs
eZzG
sT
2( ) ( ) ( ) ( )( ) ( ) ( )
1 ( ) ( )R N
D z G z R z NG zC z C z C z
D z G z
北京航空航天大学 清华大学出版社 40
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述 3.7 应用实例
北京航空航天大学 清华大学出版社 41
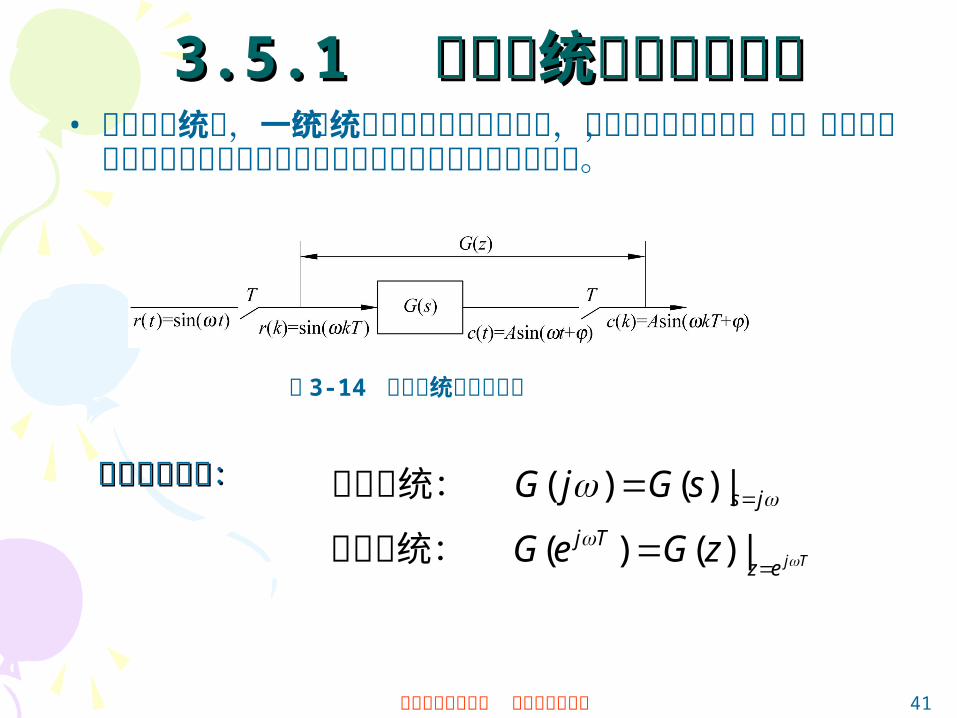
3.5.1 3.5.1 离散系统频率特性定义离散系统频率特性定义• 在离散系统中,一个系统或环节的频率特性是指,在正弦
信号作用下,系统或环节的稳态输出与输入的复数比随输入正弦信号频率变化的特性。
频率特性定义:频率特性定义:
Tjez
Tj
js
zGeG
sGjG
|)()(
|)()(
离散系统:
连续系统:
图 3-14 离散系统的频率特性

北京航空航天大学 清华大学出版社 42
3.5.2 3.5.2 离散系统频率特性的计算离散系统频率特性的计算• 离散系统频率特性的指数形式
( ) | ( ) | ( )j T j T j TG e G e G e
幅频特性
相频特性
1. 数值计算法——按 表达式逐点计算它的幅相频率特性。 ( )j TG e
1( )
1G s
s
1 1 1( )
( 1)
sT T
T
e eG z Z
s s z e
0.5T s
2
1 1( ) arctan
1 1G j
j
连续系统:
(1 ) 0.393 0.393( )
0.606 [cos(0.5 ) 0.606] sin(0.5 )
Tj T
j T T j T
eG e
e e e j
离散系统:
2 2
0.393| ( ) |
[cos(0.5 ) 0.606] sin (0.5 )
j TG e
sin(0.5 )( ) arctan
cos(0.5 ) 0.606
j TG e
例 3-13
要求绘制它们的频率特性。

北京航空航天大学 清华大学出版社 43
MatlabMatlab 符号语言实现符号语言实现Gs=sym(′1/(s+1)′) ; % 传递函数 F(s)T=0.5 ;[numGs,denGs]=numden(Gs) ; %提取分子分母%将分母转化为一般多项式pnumGs=sym2poly(numGs) ;pdenGs=sym2poly(denGs) ;%Z变换[pnumGz,pdenGz]=c2dm(pnumGs,pdenGs,T,′zoh′) ;w=0:0.1:19 ;[mag,pha]=bode(pnumGs,pdenGs,w) ;[dmag,dpha]=dbode(pnumGz,pdenGz,T,w) ;for i=1:1:90 if dpha(i)<=-180 dpha(i)=dpha(i)+360 endend
for i=1:1:190if dpha(i)<=-180dpha(i)=dpha(i)+360 ;endendfigure(1);plot(w,mag,′blue′);hold on;plot(w,dmag,′red′);Grid on;axis([0,19,0,1.2]);figure(2);plot(w,pha,′blue′);hold on;plot(w,dpha,′red′);Grid on;axis([0,19,-200,200]);

北京航空航天大学 清华大学出版社 44
图 3-15 例 3-13 的幅频和相频特性曲线

北京航空航天大学 清华大学出版社 45
3.5.2 3.5.2 离散系统频率特性的计算离散系统频率特性的计算2. 几何作图法
0
0
( )( )
( )
mj T
ij T i
nj T
ii
e zG e
e p
1
1 2
( )( )
( )( )
j Tj T
j T j T
e zG e
e p e p
1, 2m n
1 1
1 2 1 2
| || ( ) |
| ( )( ) |
j Tj T
j T j T
e z rG e
e p e p l l
1 1 2( ) ( ) [ ( ) ( )]j T j T j T j TG e e z e p e p 1 2( )
0 s
0 2T
j Te 绕园一周
北京航空航天大学 清华大学出版社 46
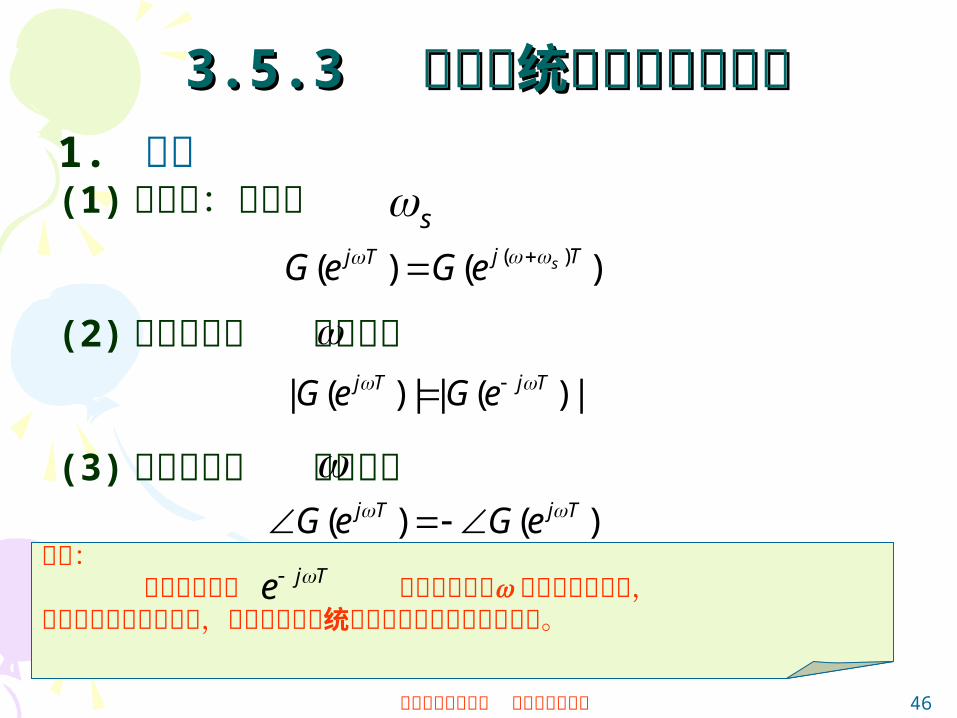
3.5.3 3.5.3 离散系统频率特性的特点离散系统频率特性的特点1. 特点(1) 周期性:周期为
(2)幅频特性为 的偶对称
(3) 相频特性为 的奇对称
( )( ) ( )sj Tj TG e G e
( ) ( )j T j TG e G e
s
说明: 由于离散环节 频率特性不是 的有理分式函数,在绘制对数频率特性时,不能像连续系统那样使用渐近对数频率特性。
j Te
| ( ) | | ( ) |j T j TG e G e
北京航空航天大学 清华大学出版社 47
2. 应注意问题
(1)离散环节频率特性不是的有理分式函数,在绘制对数频率特性时,不能像连续系统那样使用渐近对数频率特性。
(2) 离散环节频率特性形状与连续系统频率特性形状有较大差别,特别是当采样周期较大以及频率较高时,由于混叠,使频率特性形状有较大变化,主要表现有 :– 高频时会出现多个峰值;– 可能出现正相位;– 仅在较小的采样周期或低频段与连续系统频率特性相接近。

北京航空航天大学 清华大学出版社 48
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述 3.7 应用实例

北京航空航天大学 清华大学出版社 49
3.6 3.6 离散系统的状态空间描述离散系统的状态空间描述
离散系统状态方程 ( 1) ( ) ( )x k Fx k Gu k ( ) ( ) ( )y k Cx k Du k
n维
m维 p
维 F:状态转移矩阵 G:输入矩阵或控制转移矩阵 C:状态输出矩阵 D:直接传输矩阵
连续系统状态空间模型 离散系统状态空间模型
图 3-20 状态方程框
北京航空航天大学 清华大学出版社 50
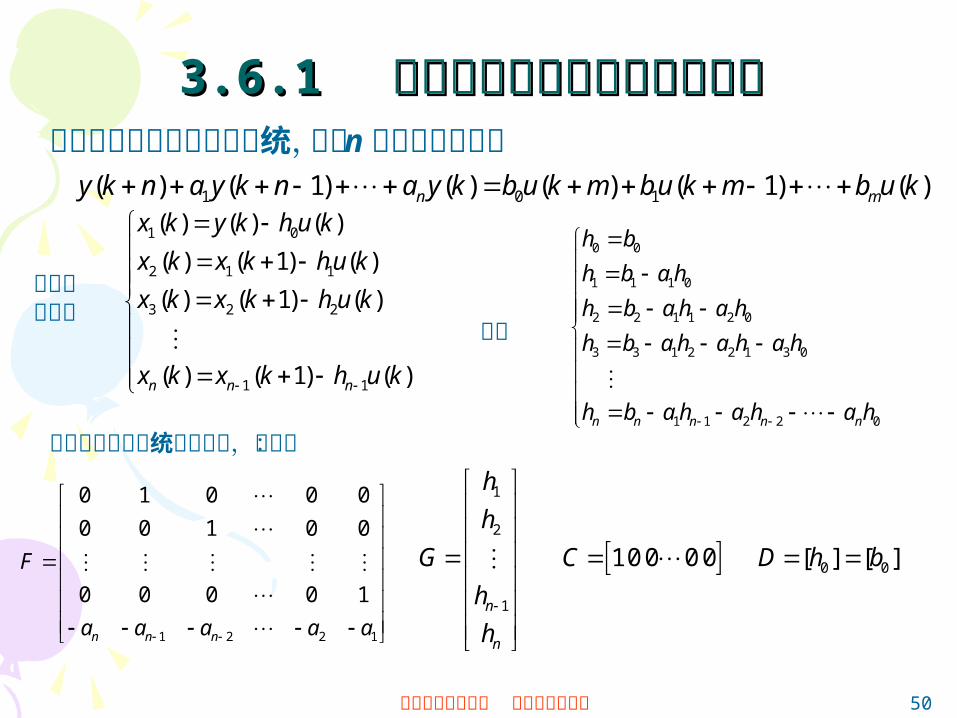
3.6.1 3.6.1 由差分方程建立离散状态方程由差分方程建立离散状态方程单输入单输出线性离散系统,可用 n 阶差分方程描述
1 0 1( ) ( 1) ( ) ( ) ( 1) ( )n my k n a y k n a y k b u k m bu k m b u k
选择状态变量
1 0
2 1 1
3 2 2
1 1
( ) ( ) ( )
( ) ( 1) ( )
( ) ( 1) ( )
( ) ( 1) ( )n n n
x k y k h u k
x k x k h u k
x k x k h u k
x k x k h u k
式中
0 0
1 1 1 0
2 2 1 1 2 0
3 3 1 2 2 1 3 0
1 1 2 2 0n n n n n
h b
h b a h
h b a h a h
h b a h a h a h
h b a h a h a h
则可得到离散系统状态方程,且有:
1 2 2 1
0 1 0 0 0
0 0 1 0 0
0 0 0 0 1
n n n
F
a a a a a
1
2
0 0
1
10 0 0 0 [ ] [ ]
n
n
h
h
G C D h b
h
h

北京航空航天大学 清华大学出版社 51
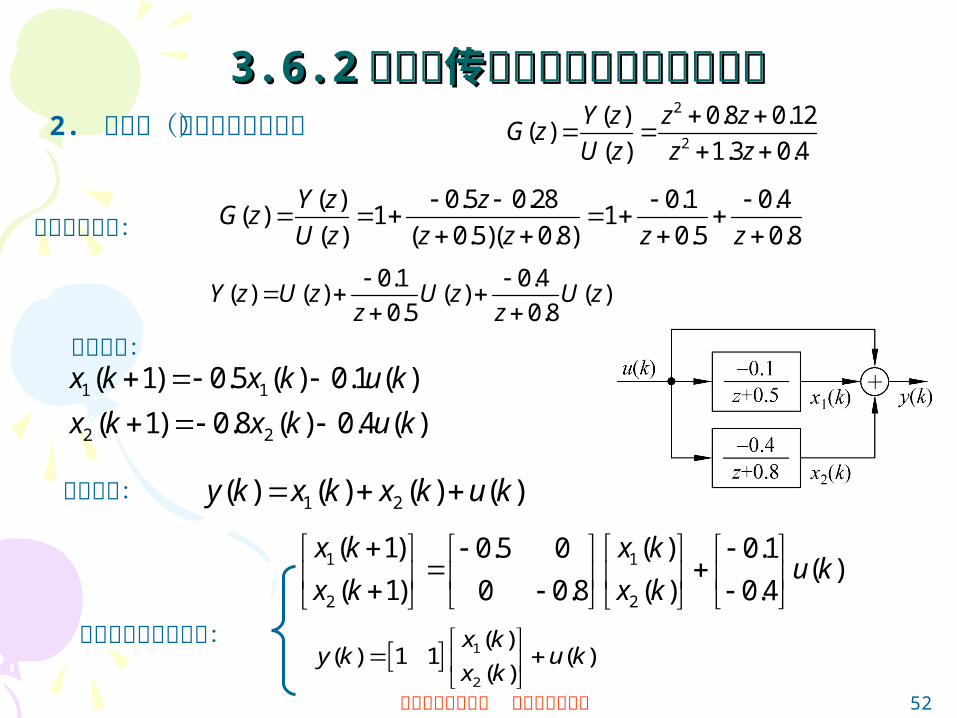
3.6.23.6.2 由脉冲传递函数建立离散状态方程由脉冲传递函数建立离散状态方程通常采用串行法、直接法等实现。
2
2
( ) 0.8 0.12( )
( ) 1.3 0.4
Y z z zG z
U z z z
1. 串行法(又称迭代法)
写成零极点形式 ( ) 0.5 0.28 0.5 0.56( ) 1 1
( ) ( 0.5)( 0.28) .05 0.8
Y z z zG z
U z z z z z
1 1( 1) 0.5 ( ) 0.5 ( )x k x k u k
2 2 1 1( 1) 0.8 ( ) ( 1) 0.56 ( )x k x k x k x k
1 20.06 ( ) 0.8 ( ) 0.5 ( )x k x k u k
状态方程:
输出方程: 2( ) ( ) ( )y k x k u k
1 1
2 2
( 1) ( )0.5 0 0.5( )
( 1) ( )0.06 0.8 0.5
x k x ku k
x k x k
1
2
( )( ) 0 1 ( )
( )
x ky k u k
x k
状态方程的矩阵形式:
北京航空航天大学 清华大学出版社 52
3.6.23.6.2 由脉冲传递函数建立离散状态方程由脉冲传递函数建立离散状态方程2. 并行法(又称部分分式法)
2
2
( ) 0.8 0.12( )
( ) 1.3 0.4
Y z z zG z
U z z z
部分分式展开:
状态方程:
输出方程:
状态方程的矩阵形式:
( ) 0.5 0.28 0.1 0.4( ) 1 1
( ) ( 0.5)( 0.8) 0.5 0.8
Y z zG z
U z z z z z
0.1 0.4( ) ( ) ( ) ( )
0.5 0.8Y z U z U z U z
z z
1 1
2 2
( 1) 0.5 ( ) 0.1 ( )
( 1) 0.8 ( ) 0.4 ( )
x k x k u k
x k x k u k
1 2( ) ( ) ( ) ( )y k x k x k u k
1 1
2 2
( 1) ( )0.5 0 0.1( )
( 1) ( )0 0.8 0.4
x k x ku k
x k x k
1
2
( )( ) 1 1 ( )
( )
x ky k u k
x k

北京航空航天大学 清华大学出版社 53
3.6.23.6.2 由脉冲传递函数建立离散状态方程由脉冲传递函数建立离散状态方程3. 直接法
2
2
( ) 0.8 0.12( )
( ) 1.3 0.4
Y z z zG z
U z z z
选状态变量:
状态方程的矩阵形式:
1 2
1 2
( ) 0.5 0.28( ) 1
( ) 1 1.3 0.4
Y z z zG z
U z z z
1 2
( )( )
1 1.3 0.4
U zW z
z z
令
1 2( ) ( 0.5 0.28 ) ( ) ( )Y z z z W z U z
1 2( ) 1.3 ( ) 0.4 ( ) ( )W z z W z z W z U z
1 2( ) 0.5 ( ) 0.28 ( ) ( )Y z z W z z W z U z
11( ) ( )X z z W z
2 12 1( ) ( ) ( )X z z W z z X z
1 1
2 2
( 1) ( )1.3 0.4 1( )
( 1) ( )1 0 0
x k x ku k
x k x k
1
2
( )( ) 0.5 0.28 ( )
( )
x ky k u k
x k

北京航空航天大学 清华大学出版社 54
3.6.3 3.6.3 计算机控制系统状态方程计算机控制系统状态方程1. 系统连续部分的离散状态方程
( ) ( ) ( )x t Ax t Bu t 被控对象的状态方程 ( ) ( ) ( )y t Cx t Du t
)()( kutu TktkT )1(
0
0
( ) ( )0( ) e ( ) e ( )d
tA t t A t
tx t x t Bu
假定系统是时不变的
0[( 1) ] e ( ) e d ( )
TAT Atx k T x kT B tu kT ( ) ( ) ( ) ( )F T x kT G T u kT
( ) eATF T
( ) ( ) ( )y kT Cx kT Du kT
状态转移矩阵
输入矩阵
0( ) e d
T AtG T tB

北京航空航天大学 清华大学出版社 55
状态转移矩阵状态转移矩阵 F(t)F(t) 的性质的性质( ) eAtF t
( ) ( ) ( )F t F t F 1( ) ( )F t F t
( ) ( )kF kt F t(0)F I
1( ) ( )F t F t I 1( )F T
( 1)( 2)( 3 )
( 4 )
( 5 )
( 6 ) 一定存在。

北京航空航天大学 清华大学出版社 56
3.6.3 3.6.3 计算机控制系统状态方程计算机控制系统状态方程2. 状态转移阵的求解—— (1) 级数展开法
2 2 3 3
0 0
( ) e / 2! / 3!! !
i i i iLAT
i i
AT ATF T I AT A T A T
i i
2 3 1
AT AT AT ATI AT I I I I
L L
计算项数 L 可由精度要求确定。
状态转移阵
输入矩阵 1
00
( ) d (e )( 1)!
i iT At AT
i
ATG T e B t I A B T B
i
2 3 1
AT AT AT ATT I I I I B
L L

北京航空航天大学 清华大学出版社 57
3.6.3 3.6.3 计算机控制系统状态方程计算机控制系统状态方程2. 状态转移阵的求解—— (2)拉普拉斯变换法
状态转移阵
拉普拉斯反变换得
2
2 3( )
I A AsI A
s s s
2 3 2 3
2 3 2 3
A A A A A AI I
s s s s s s
21
2 3( )
I A AsI A
s s s
故有
2 2 3 31 1[( ) ] e ( )
2! 3!AtA t A t
L sI A I At F t
1 1( ) ( ) [ ]t T t TF T F t L sI A

北京航空航天大学 清华大学出版社 58
3.6.3 3.6.3 计算机控制系统状态方程计算机控制系统状态方程3. 计算机控制系统闭环状态方程 整个闭环系统的状态方程,可通过求取系统数字部分、广义被控对象部分以及反馈部分的状态方程,然后消去中间变量,经整理后得到。
例 3-17 求图 3-25 所示系统的状态方程, T=0.1s
解: (1) 数字部分:
3 3( 1) 0.9 ( ) ( )x k x k e k
3( ) 0.01 ( ) 0.9 ( )u k x k e k
选状态变量 3( )x k
可得方程
图 3-25 计算机控制系统

北京航空航天大学 清华大学出版社 59
例例 3-17 3-17 求图求图 3-253-25 所示系统的状态方程所示系统的状态方程( 2 )广义被控对象部分:
被控对象连续状态方程 1 1
2 2
0 1 0( )
0 1 10
x xu t
x x
利用拉氏变换法求 1
1 1 1 1 1/ 1/ ( 1)1( )
0 1 0 0 1/( 1)( 1)
s s s s ssI A
s s ss s
1 1 1
-
1/ 1/ ( 1) 1 0.09521 1 e( ) e ( )
0 1/( 1) 0 0.90480 e
TAT
T
s s sF T L sI A L
s
0
1 e 0.0484( ) e d 10
0.95161 e
TT At
T
TG T B t
连续部分离散状态方程
1 1
2 2
( 1) ( )1 0.0952 0.0484( )
( 1) 0 0.9048 ( ) 0.9516
x k x ku k
x k x k
1( ) ( )y k x k
北京航空航天大学 清华大学出版社 60
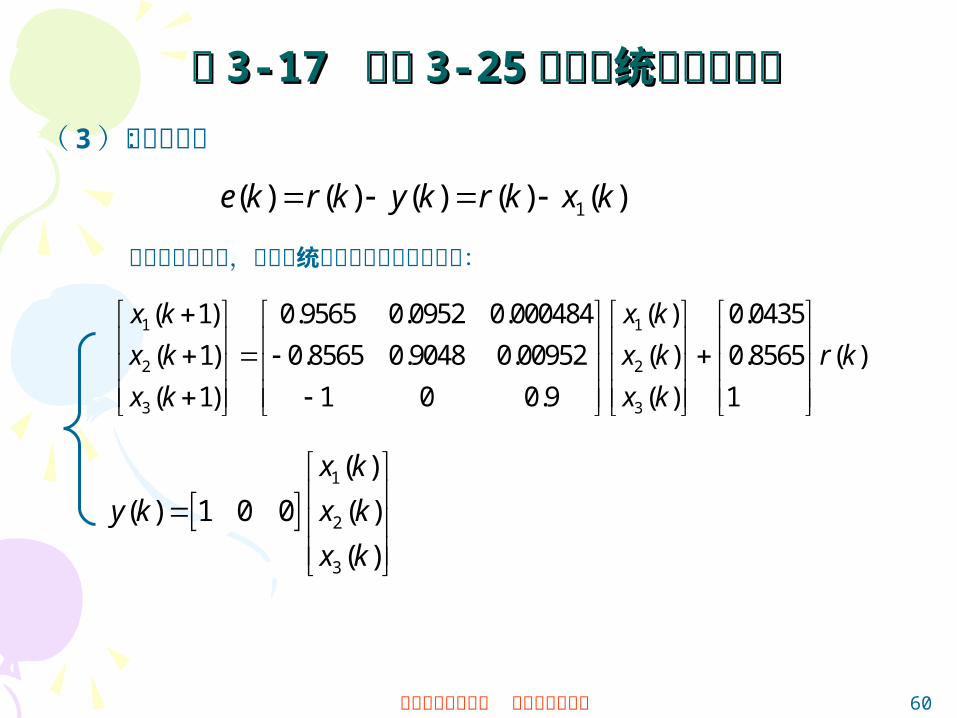
例例 3-17 3-17 求图求图 3-253-25 所示系统的状态方程所示系统的状态方程( 3 )反馈部分:
综合上面的式子,可得系统状态方程和输出方程为:
1( ) ( ) ( ) ( ) ( )e k r k y k r k x k
1 1
2 2
3 3
( 1) 0.9565 0.0952 0.000484 ( ) 0.0435
( 1) 0.8565 0.9048 0.00952 ( ) 0.8565 ( )
( 1) 1 0 0.9 ( ) 1
x k x k
x k x k r k
x k x k
1
2
3
( )
( ) 1 0 0 ( )
( )
x k
y k x k
x k
北京航空航天大学 清华大学出版社 61
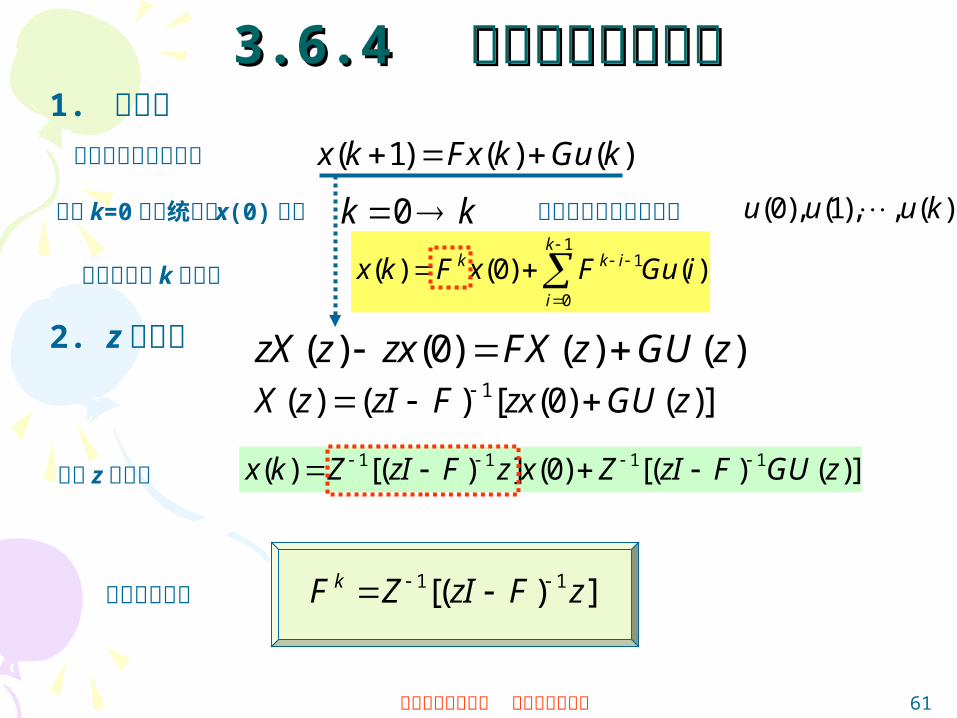
3.6.4 3.6.4 离散状态方程求解离散状态方程求解1. 迭代法
离散状态方程的通式 ( 1) ( ) ( )x k Fx k Gu k
0k k (0), (1), , ( )u u u k已知 k=0时系统状态 x(0)以及 之间各个时刻的输入量
得到现时刻 k 的状态 1
1
0
( ) (0) ( )k
k k i
i
x k F x F Gu i
2. z 变换法 ( ) (0) ( ) ( )zX z zx FX z GU z
1( ) ( ) [ (0) ( )]X z zI F zx GU z 1 1 1 1( ) [( ) ] (0) [( ) ( )]x k Z zI F z x Z zI F GU z 进行 z 反变换
1 1[( ) ]kF Z zI F z 比较后得结果
北京航空航天大学 清华大学出版社 62
3.1 离散系统时域描述——差分方程3.2 z 变换 3.3 脉冲传递函数 3.4 离散系统的方块图分析 3.5 离散系统的频域描述3.6 离散系统的状态空间描述 3.7 应用实例
北京航空航天大学 清华大学出版社 63
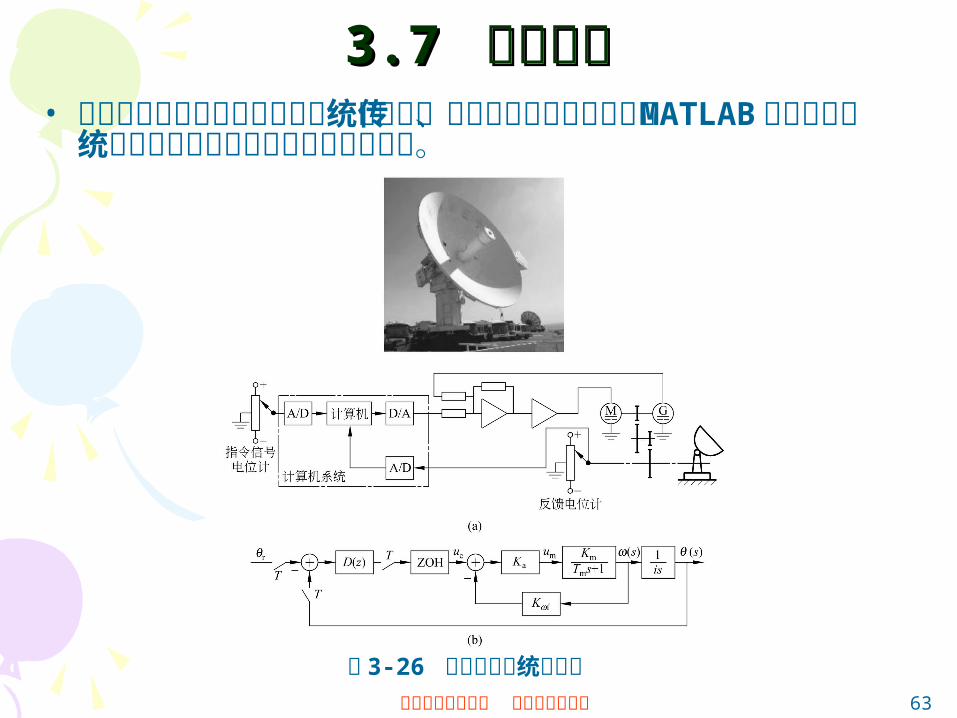
3.7 3.7 应用实例应用实例• 求下图所示天线计算机控制系统的闭环传递函数、状态方程并利
用 MATLAB软件计算系统的单位阶跃响应及开环对数频率特性。
图 3-26 天线控制系统结构图

北京航空航天大学 清华大学出版社 64
• 电枢控制的直流电动机加天线负载的传递函数( )
( )( ) 1
mm
m m
KsG s
U s T s
机电时间常数
电机传动系数
速度闭环传统函数( )
( )( ) 1c
KsG s
U s T s
速度闭环回路增益
速度回路时间常数 • 天线角速度与转角θ 的传递函数
• 速度闭环回路的传递函数
( ) 1( )
( )
sG s
s is
i 为角速度与角度之间的减速比
(1) 分别求取以下传递函数

北京航空航天大学 清华大学出版社 65
图 3-27 天线控制系统简化结构图
( ) 1, 10, 0.1 , 5dD z K K T s i 0.02T s假定 ,采样周期
2
1 1 (1 )( )
( 1) ( )
Ts TsKe K eG z Z Z
s T s is s s a
/ 20, 1/ 10K K iT a T
12
10( ) 2(1 )
( 10)G z z Z
s s
0.21
2 0.2
0.02 (1 )2(1 )
( 1) 10( 1)( )
z e zz
z z z e
0.00374( 0.939)
( 1)( 0.8187)
z
z z
( ) ( ) ( ) 0.003 74( 0.939)( )
( ) 1 ( ) ( ) ( 1)( 0.8187) 0.00374( 0.939)
r
z D z G z zz
z D z G z z z z
2
0.003 74( 0.939)
1.815 0.8222
z
z z
0.003 74( 0.939)
( 0.815)( 1)
z
z z
(2) 求取闭环传递函数

北京航空航天大学 清华大学出版社 66
闭环系统状态方程
( ) 0.003 74( 0.939)( )
( ) ( 0.815)( 1)
r
z zz
z z z
图 3-28 闭环传递函数串行结构图2 2( 1) 0.8187 ( ) 0.00374 ( )x k x k u k
1 1 2 2( 1) ( ) ( 1) 0.939 ( )x k x k x k x k
1 1 2( 1) ( ) 1.7577 ( ) 0.00374 ( )x k x k x k u k
1( ) ( ) ( )u k r k x k
1 11
2 2
( 1) ( )1 1.7577 0.00374( ( ) ( ))
( 1) ( )0 0.8187 0.00374
x k x kr k x k
x k x k
1 1
2 2
( 1) ( )0.99626 1.7577 0.00374( )
( 1) ( )0.00374 0.8187 0.00374
x k x kr k
x k x k
闭环系统特征方程 ( 0.99626) 1.7577( ) 0
0.00374 ( 0.8187)
zz zI F
z
2( ) 1.815 0.8222 0z z z
(3) 获得闭环状态方程
北京航空航天大学 清华大学出版社 67
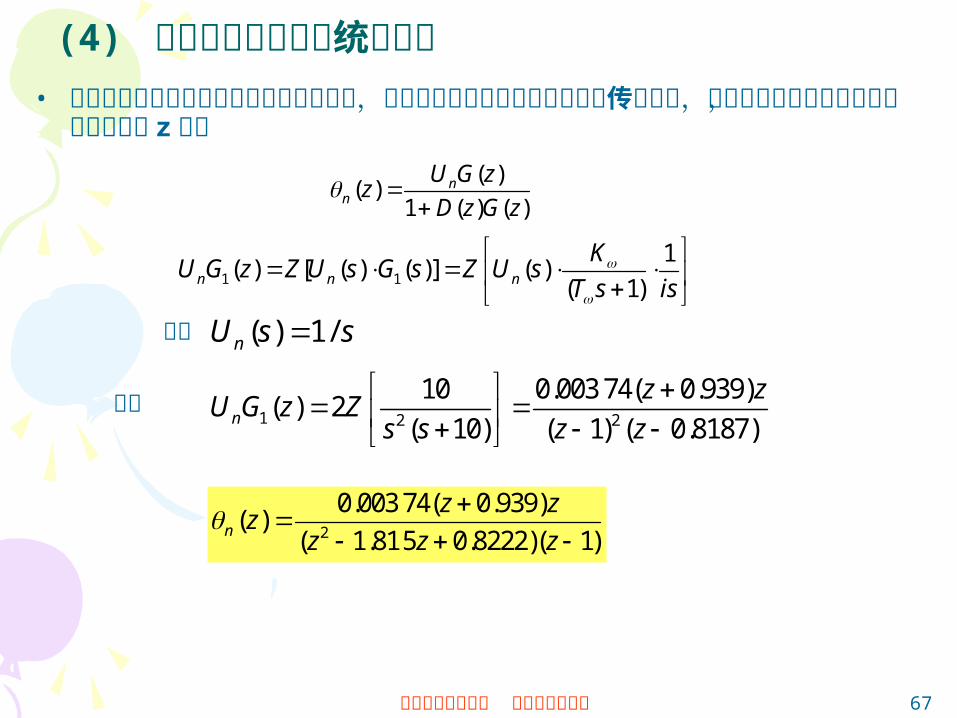
(4) 计算干扰作用下系统的输出• 由于干扰等效直接作用于速度回路输入端,无法求得干扰与天线转角
之间的传递函数,故只能求取在干扰作用下,天线转角的 z 变换 ( )
( )1 ( ) ( )
nn
U G zz
D z G z
1 1
1( ) [ ( ) ( )] ( )
( 1)n n n
KU G z Z U s G s Z U s
T s is
假设 ( ) 1/nU s s
1 2 2
10 0.003 74( 0.939)( ) 2
( 10) ( 1) ( 0.8187)n
z zU G z Z
s s z z
则有
2
0.003 74( 0.939)( )
( 1.815 0.8222)( 1)n
z zz
z z z

北京航空航天大学 清华大学出版社 68
(5) 计算系统单位阶跃响应系统输出
图 3-29 天线转角的阶跃响应
输入指令
1 2
2 1 2
0.003 74( 0.939) 0.003 74 0.00351( ) ( ) ( )
1.815 0.8222 1 1.815 0.8222r r
z z zz z z
z z z z
z 反变换可得
( ) 0.00374 ( 1) 0.00351 ( 2)) 1.815 ( 1) 0.812 22 ( 2)r rk k k k k
( ) 1( )( 0,1,2, )r k k k
MATLAB 程序:
tt=0.01;%sampling timet(1)=0;t(2)=t(1)+tt;% input thetar(1)=0;thetar(2:200)=1;% inertial condition theta(1)=0;theat(2)=0;for k=3:200t(k)=t(k-1)+tt;theta(k)=0.00326*thetar(k-1)+thetar(k-2)+1.8144*theta(k-1)-0.8216*theta(k-2);end plot(t,theta,′k′)
北京航空航天大学 清华大学出版社 69
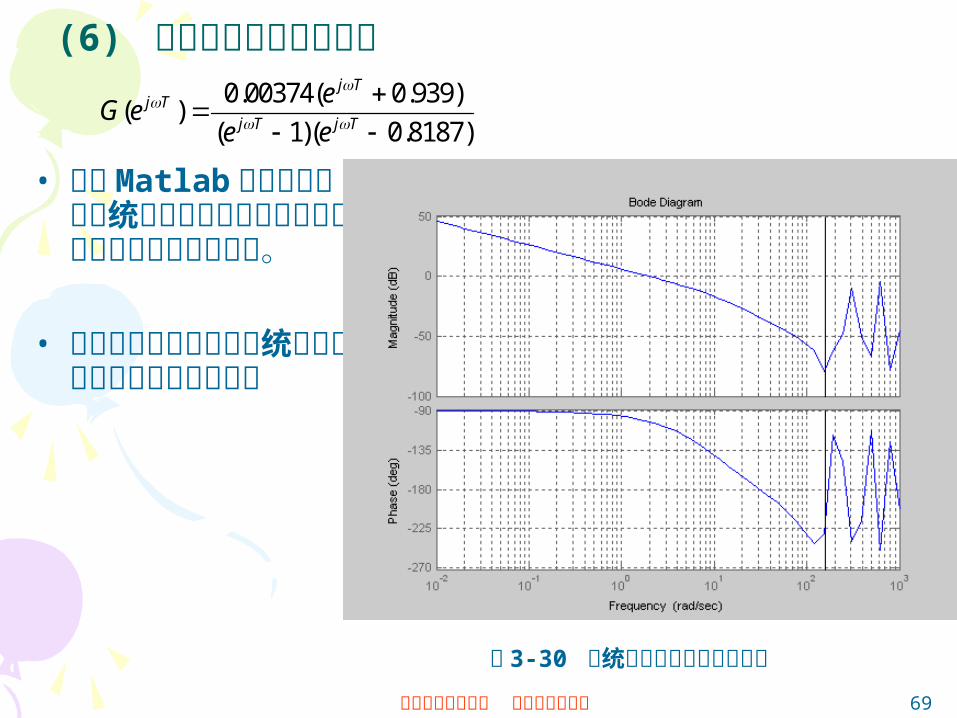
(6) 计算开环对数频率响应
• 利用 Matlab软件计算离散系统对数频率特性的相关指令,可得对数频率响应特性。
• 从图中可以看到离散系统频率响应特性的周期性等特点
0.00374( 0.939)( )
( 1)( 0.8187)
j Tj T
j T j T
eG e
e e
图 3-30 系统开环对数频率响应曲线

北京航空航天大学 清华大学出版社 70
第第 33 章 内容结束!章 内容结束!