© 2004 andreas haeberlen, rice university 1 practical robust localization over large-scale wireless...
Post on 20-Dec-2015
216 views
TRANSCRIPT

© 2004 Andreas Haeberlen, Rice University1
Practical Robust Localization over Large-Scale Wireless Ethernet Networks
Andreas Haeberlen
Eliot Flannery
Andrew Ladd
Algis Rudys
Dan Wallach
Lydia Kavraki
Rice UniversityHouston, TX
10th Annual International Conference on Mobile Computingand Networking (MOBICOM)
September 28, 2004Philadelphia, PA

2© 2004 Andreas Haeberlen, Rice University
Motivation
Location-aware computing has many interesting applications:
Navigation Asset tracking Tourist/visitor guides Advertising Finding resources
Visitor tracking Content redirection Robot navigation Sensor networks Intruder detection
Goal: Locate a device in a building
The ideal localization system:CheapEasy to deployAccurateRobust

3© 2004 Andreas Haeberlen, Rice University
Related Work
Solutions with special hardware Good accuracy Expensive Hard to deploy
Example: Cricket [Priyantha 2000]
Ultrasoundbeacons

4© 2004 Andreas Haeberlen, Rice University
Related Work
Bayesian localization [Ladd 2002] Good accuracy Inexpensive hardware
But: Not practical! Needs many days
of training Does not work with
different hardware Accuracy varies during the day

5© 2004 Andreas Haeberlen, Rice University
Overview
Improvements over [Ladd 2002]: Drastic reduction in training time Adapts to different hardware Robust against untrained variations
Techniques used: Topological localization Simplified signal model Calibration

6© 2004 Andreas Haeberlen, Rice University
Training 802.11 wireless
signal propagation is complex Need training
Operator visits every location, measures signal strength
Result: A signal map of the entire building
Observed signal strength
Occ
urr
ence
s
7© 2004 Andreas Haeberlen, Rice University
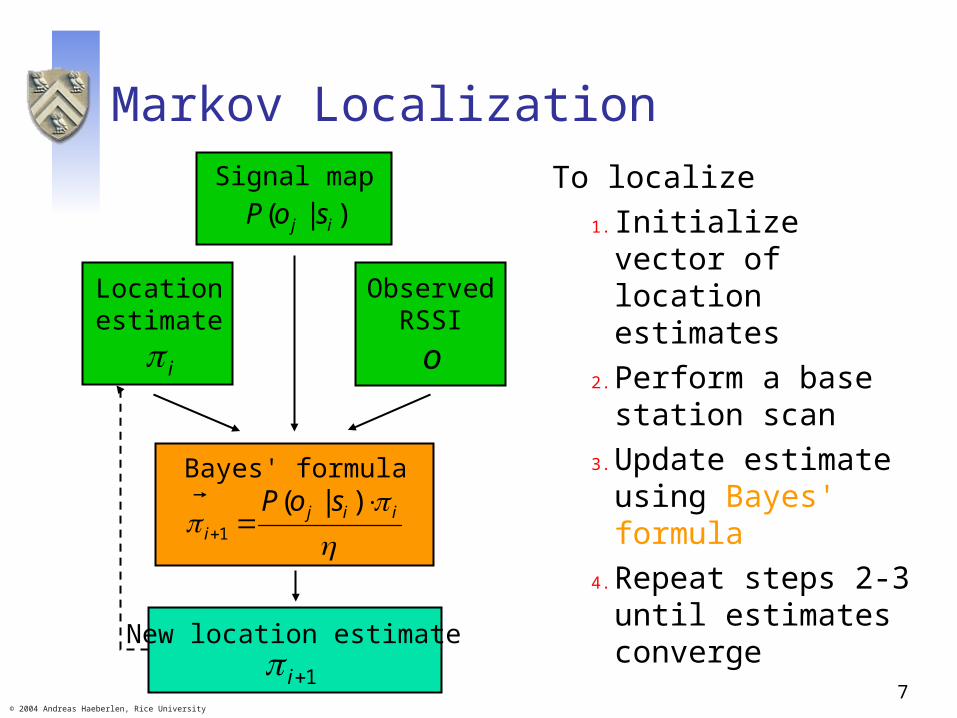
Markov Localization
To localize1. Initialize vector of
location estimates
2. Perform a base station scan
3. Update estimate using Bayes' formula
4. Repeat steps 2-3 until estimates converge
Signal map)|( ij soP
Locationestimate
iObserved
RSSI
o
iiji
soP
)|(1
Bayes' formula
New location estimate
1i

8© 2004 Andreas Haeberlen, Rice University
Topological regions Many applications do not
need 1-2 meter precision Can trade metric
resolution for lower training time
Localize to regions Offices Hallway segments Parts of larger rooms
Reduces training effort by an order of magnitude
Occupancy grid
Regions

9© 2004 Andreas Haeberlen, Rice University
Gaussian signal model Previous methods
keep a histogram of signal strengths
Problems Overtraining Undertraining
Use Gaussian as an approximation! More robust Saves memory Needs less training
Observed signal strength
Occ
urr
en
ces
Observed signal strength
Occ
urr
en
ces
Minor mode
Gap

10© 2004 Andreas Haeberlen, Rice University
Experiment: Duncan Hall
Duncan Hall: >200 offices, classrooms, seminar rooms Total area: 158 x 75 meters

11© 2004 Andreas Haeberlen, Rice University
Duncan Hall ArchitectureLarge open spaces
(low signal variation)
Clerestory ceiling(reflections)
Metal air ducts(distortions)

12© 2004 Andreas Haeberlen, Rice University
Experiment: Duncan Hall
Manually created 510 cells, ~3x5m each Collected 100 BS scans/cell (51249 total) 28 man-hours were sufficient!
Data collection:
Experiments: Partition data set
Training data Testing data
51249 scans
13© 2004 Andreas Haeberlen, Rice University
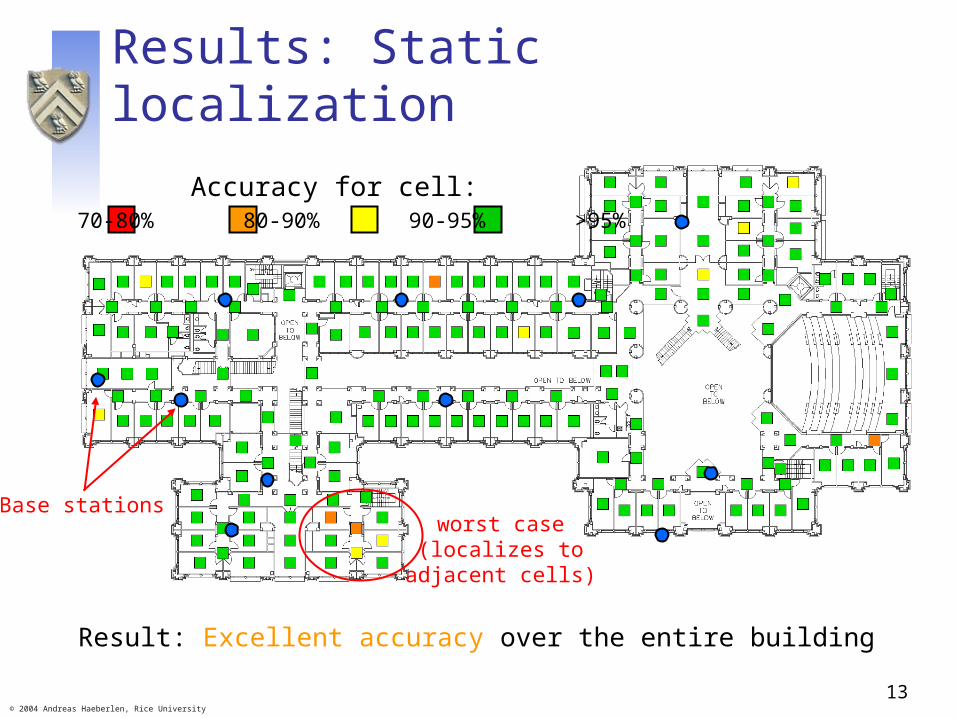
Results: Static localization
Result: Excellent accuracy over the entire building
Accuracy for cell:70-80% 80-90% 90-95% >95%
Base stationsworst case(localizes to
adjacent cells)
14© 2004 Andreas Haeberlen, Rice University
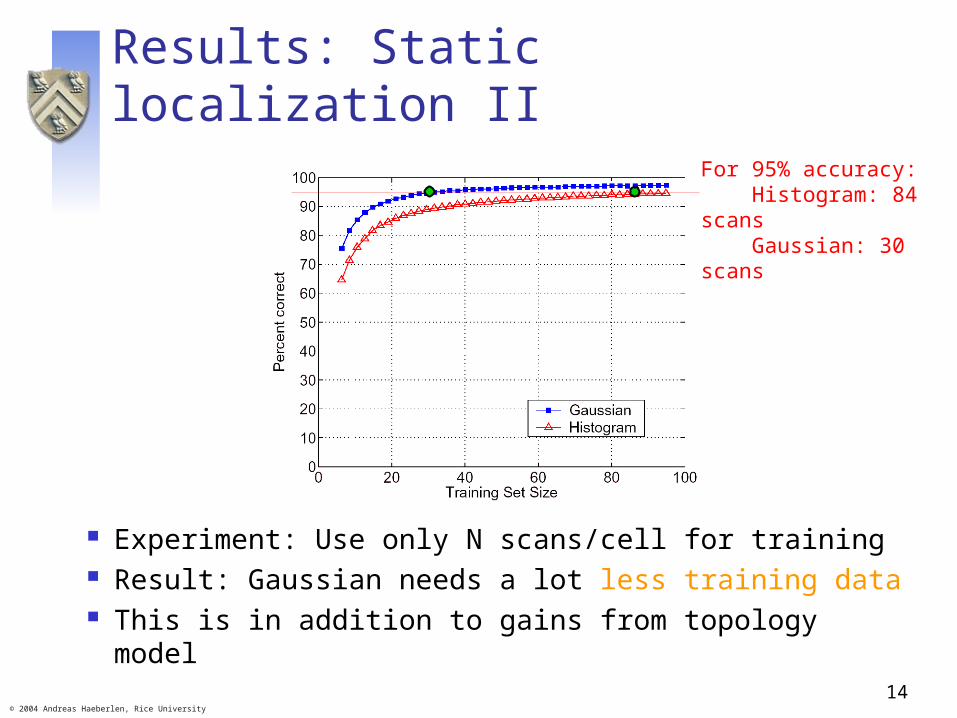
Results: Static localization II
Experiment: Use only N scans/cell for training Result: Gaussian needs a lot less training data This is in addition to gains from topology model
For 95% accuracy: Histogram: 84 scans Gaussian: 30 scans

15© 2004 Andreas Haeberlen, Rice University
Problem: Untrained variations
1. Differences in hardware, software, or antenna2. Observed signal strength changes over time
Sig
nal S
tren
gth
3am 3am9am 3pm 9pm
140
100
60
20
Source: [Tao 2003]
Pro
bab
ility
of
reg
iste
rin
gsi
gn
al st
ren
gth
0.18
0.00
0.12
0.06

16© 2004 Andreas Haeberlen, Rice University
Calibration: New Hardware
Approximate relationship between 'old' and 'new' values by a linear function
Invert function, apply it to each observation
Signal strength (reference card)
0 25612864 192
256
192
128
64
0
Sig
nal st
ren
gth
(n
ew
card
)
i2=m·i1+c

17© 2004 Andreas Haeberlen, Rice University
Calibration: Time-of-day
Linear approximation works for time-of-day variations, too!
Learn parameters using calibration
Signal strength (nighttime)
0 25612864 192
256
192
128
64
0Sig
nal st
ren
gth
(1
1am
)
i2=m·i1+c
Parameters
18© 2004 Andreas Haeberlen, Rice University
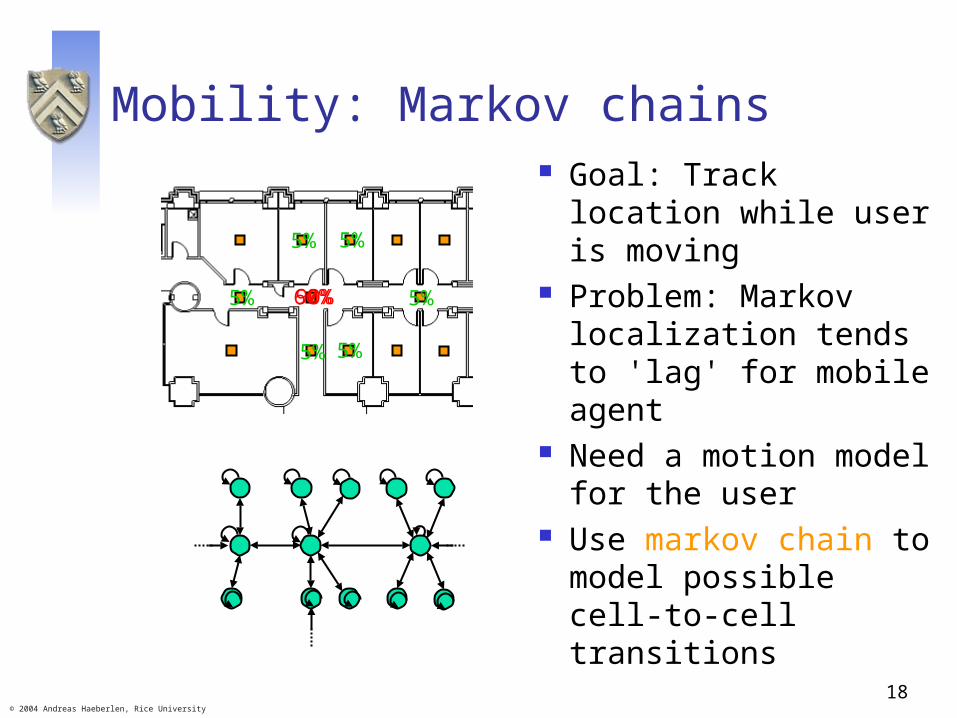
Mobility: Markov chains Goal: Track location
while user is moving Problem: Markov
localization tends to 'lag' for mobile agent
Need a motion model for the user
Use markov chain to model possible cell-to-cell transitions
90%
5% 5%
5% 5%
5%5%
60%

19© 2004 Andreas Haeberlen, Rice University
"It doesn't work any more!"
Base stations were upgraded to 802.11a/b/g New IOS software New radio module
What we did: Configured new BSSIDs Ran calibration once
System works, delivers good accuracy!
2.4 GHz radiomodule

20© 2004 Andreas Haeberlen, Rice University
Results: Mobility
- Movie -
Experiment on 09/23/04(after 802.11a/b/g upgrade)

21© 2004 Andreas Haeberlen, Rice University
Conclusions Topological localization delivers good
accuracy with a reasonable training effort Gaussian sensor model is more robust
and requires less training time than histogram-based model
Training data can be adapted for use with different hardware and under different conditions
System is deployed in a large office building and in practical use