บทที่ 1 พีชคณิตเวกเตอร์
TRANSCRIPT

����1
พชคณตเวกเตอรและระบบพกด
�ªµ¤¦ ¼oÁ�É¥ª ��Áª�Á�° ¦ r¨ ³�¦ ³��¡ ·����º° Á�È�Á�¦ ºÉ°�¤ º° ε��Ä��µ¦ «¹�¬µª ·�µ¢ · ·� r�
Ã�¥Á�¡ µ³Â¤nÁ®¨ È�Å¢ ¢ µ�Ä����Ê�³«¹�¬µÁª�Á�° ¦ r¡ ºÊ��µ��Ã�¥Á¦ ·É¤�µ��¡ ���·�Áª�Á�° ¦ r��
การบวก การลบเวกเตอร การคณเวกเตอรดวยสเกลาร การคณเวกเตอร ผลคณเปนเวกเตอร
และผลคณเปนสเกลาร การคณของสามเวกเตอร การอางองปรมาณเวกเตอร ในระบบพกดตาง ๆ เชน ระบบพกดฉาก พกดทรงกระบอก และพกดทรงกลม �µ¦ Á� É¥�¦ ³��¡ ·��จาก
ระบบ®�¹É�Å�เปน° �¦ ³��®�¹É�
1.1 ปรมาณเวกเตอร และปรมาณสเกลาร
ในทางฟสกสแบงปรมาณออกเปน 2 ประเภท ไดแก สเกลาร และเวกเตอร
�ªµ¤®¤µ¥�°��¦ ·¤µ��Ê� °���³°�·�µ¥Å�o���Ê1.1.1 สเกลาร (scalar) ®¤µ¥�¹���¦ ·¤µ��É�ε®���¬�³�°��¦ ·¤µ�Å�o° ¥nµ�
สมบรณเพยงบอกเฉพาะขนาดของปรมาณ เชน มวล 20 กโลกรม, อณหภม 20 องศาเซลเซยส �ª ° ¥nµ�° ºÉ��Ç��°��¦ ·¤µ�� Á�µ¦ r�Á�n��¡ ¨ ��µ��° �¦ µÁ¦ Ȫ�Áª ¨ µ�² ¨ ² ��¦ ·¤µ� Á�µ¦ r�Ê¥�
¦ ª ¤Å��¹��¦ ·¤µ��ÉÁ�È�¢��r���°��ε®�n��ÉÁ¦ ¥�ª nµ� �µ¤ Á�µ¦ r� (scalar field) และเลข
จานวนจรง ดวย1.1.2 เวกเตอร (vector) ®¤µ¥�¹���¦ ·¤µ��É�ε®���¬�³�°��¦ ·¤µ��Ê���µ�¨ ³
ทศทางของปรมาณ จงจะมความหมายสมบรณ เชน แรง 20 นวตน ไปทางซาย ความเรว 20เมตรตอวนาท ไปทางทศตะวนออก ตวอยางของปรมาณเวกเตอร เชน การกระจด ความเรว
�µ¤Å¢ ¢ µ�� �µ¤Â¤nÁ®¨ È��¦��² ¨ ² ��¦ ·¤µ��ʦ ª ¤�¹� �µ¤Áª�Á�° ¦ r� (vector field) �¹É�Á�È�
¢��r���°��ε®�n��É�°��ε®�n��Ê���µ��¨ ³�·«�µ�
�¦ ·¤µ�Áª�Á�° ¦ r µ¤µ¦ ��É�³แสดงปรมาณไดโดยใชการเขยนรปลกศร โดยความยาว
ของเสนตรง Â����µ��°�Áª�Á�° ¦ r�¨ ³®ª ¨ ¼�«¦ �É�µ¥Á o��¦���³Â���·«�µ��°�Áª�Á�° ¦ r��เชน ถา R
เปนเวกเตอรบอกตาแหนง จาก P ไป Q จะเขยนเวกเตอร ไดดง¦ ¼��É1.1

2
P
Q
¦ ¼��É�1.1 ลกศรแทนเวกเตอรจาก P ไป Q
เวกเตอรใด ๆ อาจจะเขยนสญลกษณแดงสมการ
A
= aA ˆ =
�Á¤ºÉ°��A
= A เปนขนาดขอ
a เป�Áª�Á�° ¦ r®�¹É�®�nª ¥(un
��������� a =A
A
=
1.2 การบวกเวกเตอร
ให A
และ B�Á�È�Áª�Á�° ¦ r��ɤ
เวกเตอร ของ A
และ B�³®µÅ�oª ·�®�¹É��
ความยาวใหมอตราสวนเหมาะสมกบขนาด แ
A
แลว เขยน เวกเตอร B
โดยเอาหางเวกเตอรลพธจะลากจากหางของเวกเตอรแรก
ให C
เปนเวกเตอรลพธของเวกเตอร
C
= BA
R
สดงในเทอมของขนาด และทศทางได ตวอยาง
aA ˆ
(1.1)
งเวกเตอร A
it vector)�ɤ�·«�µ�Å��µ�Á�¥ª ���A
A
A
(1.2)
��µ��¨ ³�·«�µ�ตาม¦ ¼��É1.2 ก. การบวก
�º°�µ¦ Á�¥�¦ ¼��Á¦ ·É¤�µ�Á�¥��A
กาหนดสเกลละเขยนทศตา¤�É�ε®��Ä®o��Á¤ºÉ° Á�¥�Áª�Á�° ¦ r��
ของ B
มาตอเขา�É®ª ¨ ¼�«¦�°�Áª�Á�° ¦ r¦ ����( A
) Å��É®ª�°�Áวกเตอรสดทาย ( B
)
A
+ B
จะแสดงได ��¦ ¼��É�1.2 ข.
(1.3)
3
B
B
A
BAC
A
B
ก.
ข.
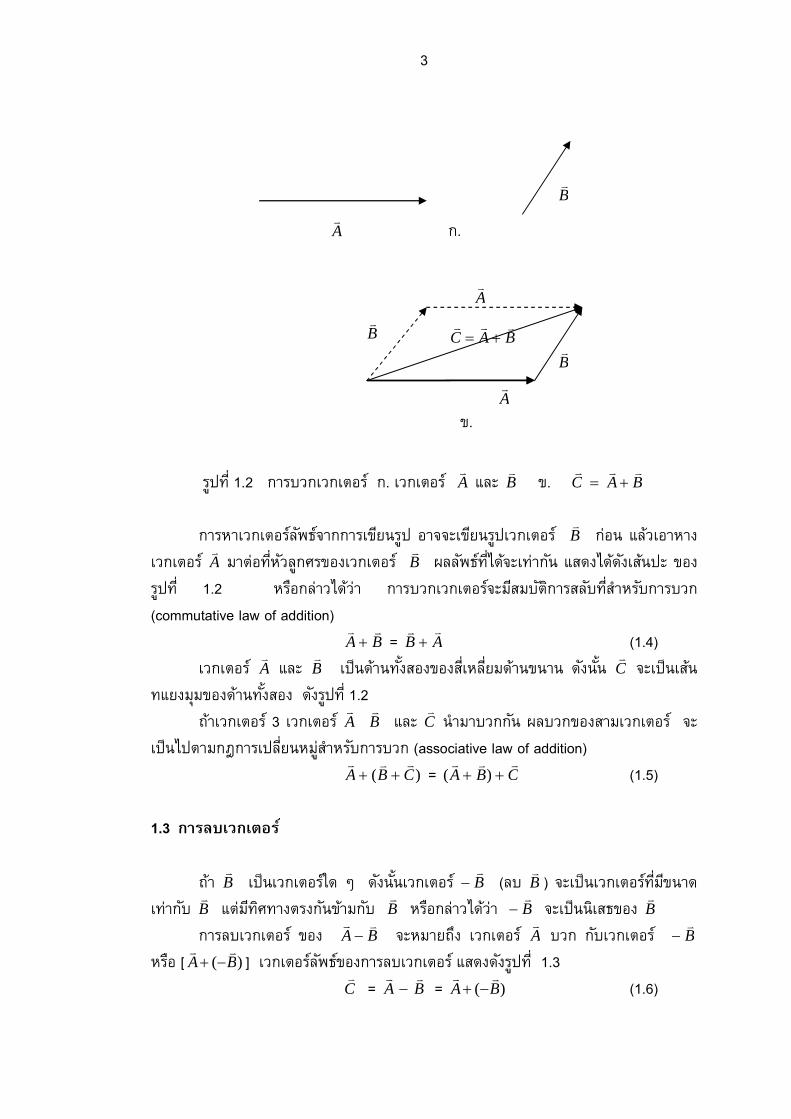
¦ ¼��É�1.2 การบวกเวกเตอร ก. เวกเตอร A
แล
การหาเวกเตอรลพธจากการเขยนรป อาจจะเขยน
เวกเตอร A¤µ�n° �É®ª ¨ ¼�«¦�°�Áª�Á�° ¦ r��B
ผลลพธ�
¦ ¼��É 1.2 ®¦ º° �nµª Å�oª nµ� �µ¦�ª�Áª�Á�° ¦(commutative law of addition)
BA
= AB
เวกเตอร A
และ B��Á�È��oµ��Ê� °��°� ÉÁ®¨ É¥
�Â¥�¤»¤�°��oµ��Ê� °�����¦ ¼��É1.2
ถาเวกเตอร 3 เวกเตอร A
B
และ C
นามาบวÁ�È�Å��µ¤���µ¦ Á� É¥�®¤¼n 宦 ��µ¦�ª��(associative
)( CBA
= BA
)(
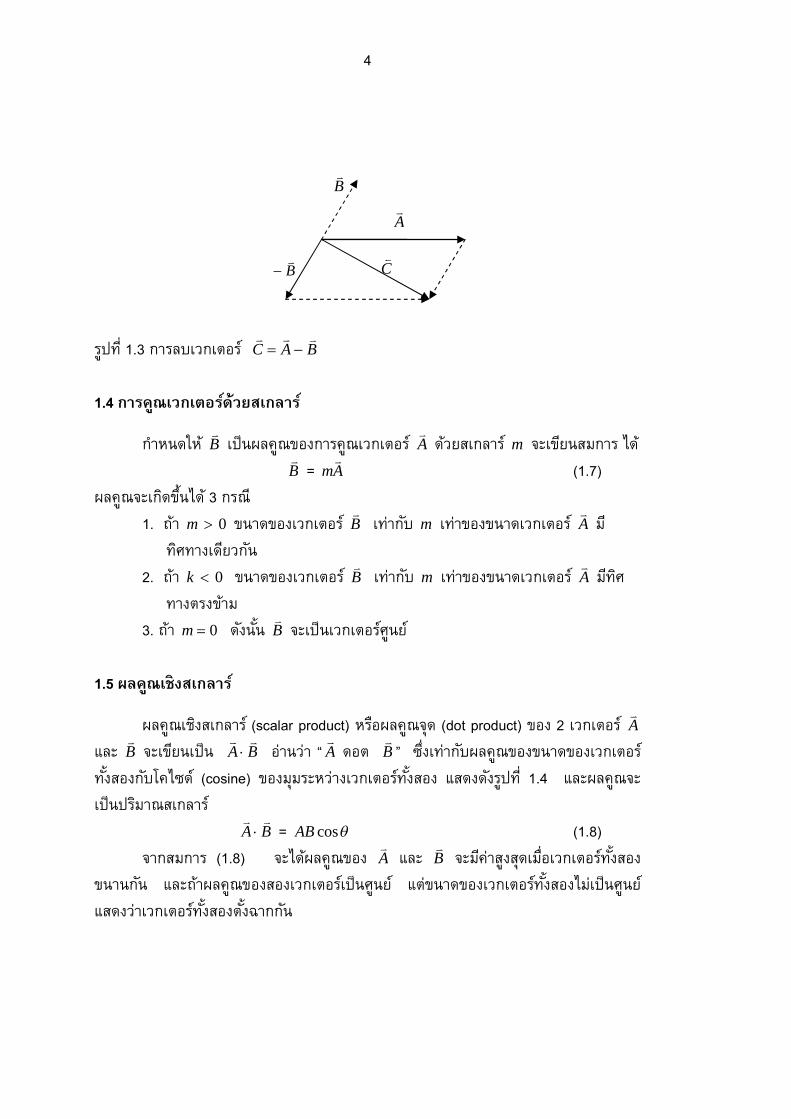
1.3 การลบเวกเตอร
ถา B�Á�È�Áª�Á�° ¦ rÄ��Ç�����Ê�Áª�Á�° ¦ r� B
เทากบ B
แตมทศทางตรงกนขามกบ B
หรอกลาวไดว
การลบเวกเตอร ของ BA
จะหมายถง เวกหรอ [ )( BA
]��Áª�Á�° ¦ r ¡ �r�°��µ¦ ¨ �Áª�Á�° ¦ r� ��
C
= BA
= (A
A
ะ B
ข
รปเวกเตอ
ÉÅ�o�³ เทาก
r�³¤ ¤��
¤�oµ���
กกน ผลบlaw of ad
C
(ลบ B
)า B
จ
เตอร A
��¦ ¼��É��1
)B
. BAC
ร B
กอน แลวเอาหาง
น แสดงไดดงเสนปะ ของ
·�µ¦ ¨ ��É Îµ®¦ ��µ¦�ª��
(1.4)µ�����Ê��C
จะเปนเสน
วกของสามเวกเตอร จะdition)
(1.5)
�³Á�È�Áª�Á�° ¦ r�ɤ��µ�ะเปนนเสธของ B
บวก กบเวกเตอร B
.3
(1.6)
4
B
A
¦ ¼��É�1.3 การลบเวกเตอร C
1.4 การคณเวกเตอรดวยสเ
กาหนดให B
เปนผล
��¼��³Á�·��¹Ê�Å�o�3 กรณ
1. ถา 0m ขนาด
ทศทางเดยวกน 2. ถา 0k ขนาด
ทางตรงขาม3. ถา 0m �����Ê�
1.5 ผลคณเชงสเกลาร
ผลคณเชงสเกลาร (sและ B
จะเขยนเปน BA
�Ê� °�กบโคไซด (cosine) �เปนปรมาณสเกลาร
BA
จากสมการ (1.8)ขนานกน และถาผลคณของ
 ��ª nµÁª�Á�° ¦ r�Ê� °��Ê��µ
B
C
BA
กลาร
คณของการคณเวกเ
B
= Am
ของเวกเตอร B
เท
ของเวกเตอร B
เท
�B
จะเปนเวกเตอรศ
calar product) หรอผ อานวา “ A
ดอต
°�¤»¤¦ ³®ª nµ�Áª�Á�°
= cosAB
จะไดผลคณของ A
สองเวกเตอรเปนศน
���
ตอร A
ดวยสเกลาร m จะเขยนสมการ ได
(1.7)
ากบ m เทาของขนาดเวกเตอร A
ม
ากบ m เทาของขนาดเวกเตอร A
มทศ
นย
ลคณจด (dot product) ของ 2 เวกเตอร A
B
”���¹É�Á�nµ��ผลคณของขนาดของเวกเตอร
¦ r�Ê� °�� ����¦ ¼��É1.4 และผลคณจะ
(1.8)
และ B
�³¤�nµ ¼� »�Á¤ ºÉ° Áª�Á�° ¦ r�Ê� °�ย แตขนาดของÁª�Á�° ¦ r�Ê� °�ŤnÁ�È�«¼�¥r

5
B
¦ ¼��É�1.4 แสดงการผลคณเช
¤��·¡ ºÊ��µ��µ��¦1. BA
=
2. (BA
3. )( BAk
Á¤ ºÉ°�k เ
1.6 ผลคณเชงเวกเตอร
ผลคณเชงเวกเตอร
เวกเตอร A
และ B
จะเขยน�¹É�Á�·��µ���¼��°���µ��
Á¤ºÉ°�n Á�È�Áª�Á�° ¦
กบระนาบ ของ A
และ B
ห
ไป B
ดงร��É�1.5 ก. �®¦ º° ®เวกเตอร A
���·Êª �µ�Â���·«
ให C
เปนผลคณเชง
ผลคณเชงเวกเตอร แ
Áª�Á�° ¦ r®�¹É�®�nª ¥�เขยนได
nC ˆ
Á¤ ºÉ°สมบตบางประการขอ
1. BA
=
2. (BA
3. BAk
)(
Á¤ ºÉ°�k เป
A
งส
³�B
C
=
ปน
(ve
เ°�
r®�
ร
µÁ
เว
สด
เป
=
งผ
C
=
น
cosB
เกลาร
µ¦ �°���¼�Á�·�A
) = ABA
BAk
)( = A
ปรมาณสเกลาร
ctor product
ปน BA
อา °�Áª�Á�° ¦ r��
BA
= AB s
¹É�®�nª ¥� ���
อทศของ n จะ
�µ��µ¦ Ä�o�·Êª ¤ º°ª�Á�° ¦ r�B
��®ª�
กเตอรของสองเวC
= BA
งในเทอมของกา
น
)ˆ()ˆ( bBaA =
n = a b
ลคณเชงเวกเตอ
AB
) = BA
+ A
)( BAk
= A
ปรมาณสเกลาร
Á�µ¦ r
C
)( Bk
) หรอผลคณไขว (cross product) ของ 2
นวา “ A
ครอส B
” มนยามวาเปนเวกเตอรÅ��r�(sine) �°�¤»¤¦ ³®ª nµ�Áª�Á�° ¦ r�Ê� °���
nin (1.9)
·«�°���¼��°�Áª�Á�° ¦ r�Ê� °���¹É��³�Ê��µ�
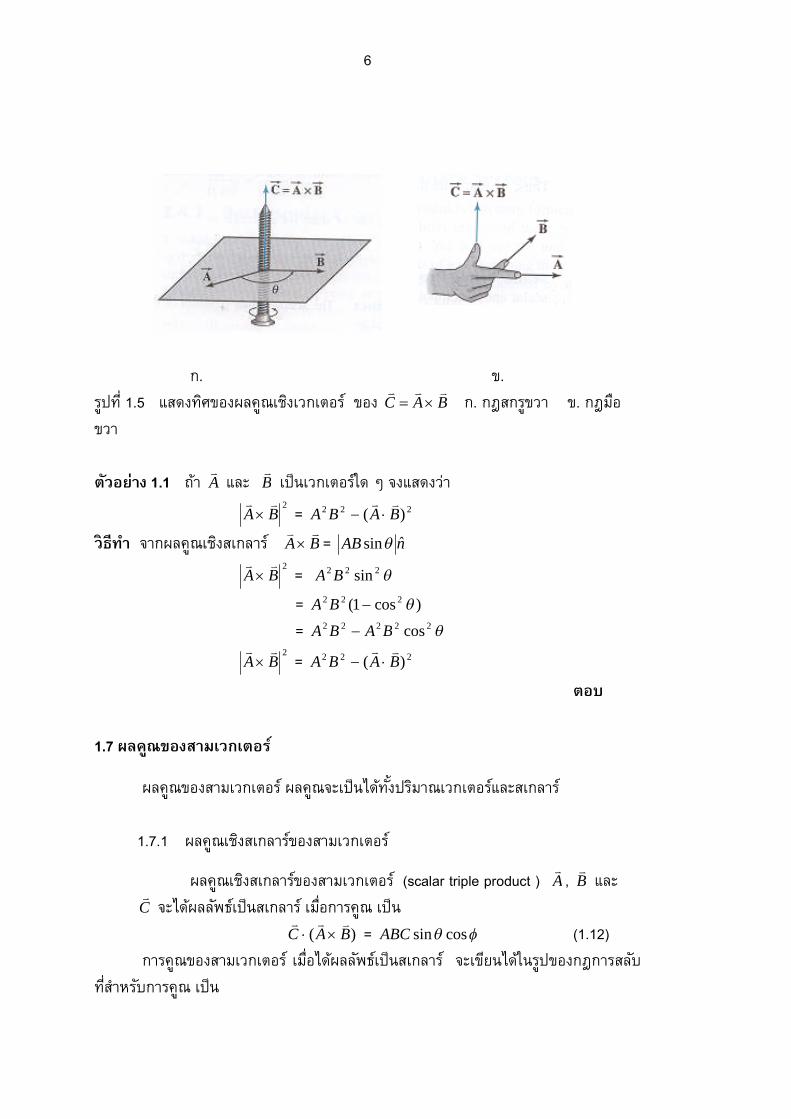
หาไดจากกฎการหมนสกรเกลยวขวา จาก A
�ªµ����¦ ¼��É1.5 ข. Ã�¥Ä®o�·Êª �ÊÂ���·«�°�·Êª ¤ º°�³Â���·«�°�Áª�Á�° ¦ r®�¹É�®�nª ¥��n
กเตอร A
และ B
จะได (1.10)
รคณเวกเตอรของขนาด และทศทางในรป
ABba )ˆˆ(
(1.11)ร
C
)( Bk
ใด ๆ
6
ก. ข.¦ ¼��É�1.5 แสดงทศของผลคณเชงเวกเตอร ของ BAC
ก. กฎสกรขวา ข. กฎมอ
ขวา
ตวอยาง 1.1 ถา A
และ B
เปนเวกเตอรใด ๆ จงแสดงวา2
BA
= 222 )( BABA
วธทา จากผลคณเชงสเกลาร BA
= nAB ˆsin2
BA
= 222 sinBA
= )cos1( 222 BA
= 22222 cosBABA 2
BA
= 222 )( BABA
ตอบ
1.7 ผลคณของสามเวกเตอร
��¼��°� µ¤Áª�Á�° ¦ r���¼��³Á�È�Å�o�Ê��¦ ·¤µ�Áª�Á�° ¦ r¨ ³ Á�µ¦ r
1.7.1 ผลคณเชงสเกลารของสามเวกเตอร
ผลคณเชงสเกลารของสามเวกเตอร (scalar triple product ) A
, B
และ
C�³Å�o�¨ ¡ �rÁ�È� Á�µ¦ r�Á¤ ºÉ°�µ¦�¼��Á�È�
)( BAC
= cossinABC (1.12)�µ¦�¼��°� µ¤Áª�Á�° ¦ r�Á¤ ºÉ° Å�o�¨ ¡ �rÁ�È� Á�µ¦ r���³Á�¥�Å�oในรปของกฎการสลบ
�É Îµ®¦ ��µ¦�¼��เปน
7
n
)( BAC
= )( CBA
= )( ACB
(1.13)
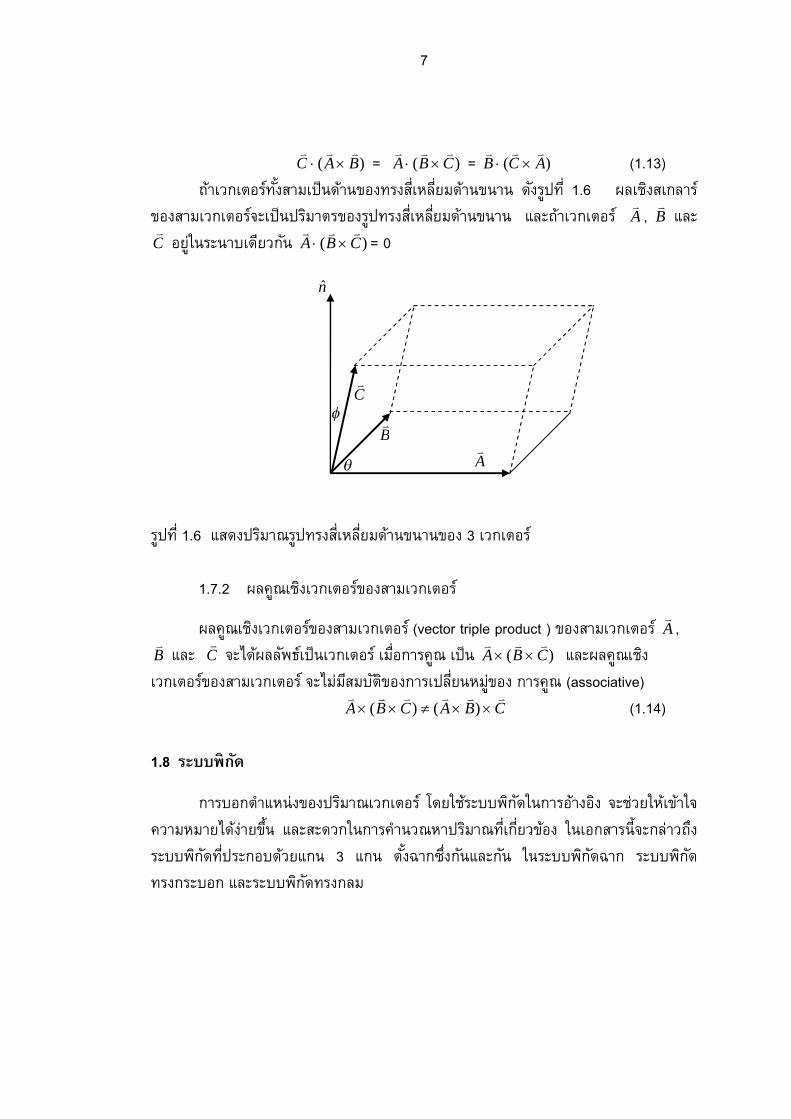
�oµÁª�Á�° ¦ r�Ê� µ¤Á�È��oµ��°��¦� ÉÁ®¨ É¥¤�oµ���µ����¦ ¼��É1.6 ผลเชงสเกลาร�°� µ¤Áª�Á�° ¦ r�³Á�È��¦ ·¤µ�¦�°�¦ ¼��¦� ÉÁ®¨ É¥¤�oµ���µ� และถาเวกเตอร A
, B
และ
C
อยในระนาบเดยวกน )( CBA
= 0
¦ ¼��É�1.6�� ���¦ ·¤µ�¦ ¼��¦� ÉÁ®
1.7.2 ผลคณเชงเวกเตอ
ผลคณเชงเวกเตอรของสาB
และ C�³Å�o�¨ ¡ �rÁ�È�Áª�
Áª�Á�° ¦ r�°� µ¤Áª�Á�° ¦ r��³Å¤n¤
1.8 ระบบพกด
การบอกตาแหนงของปรม
�ªµ¤®¤µ¥Å�o�nµ¥�¹Ê� และสะดวก
¦ ³��¡ ·���É�¦ ³�°��oª ¥Â�� 3ทรงกระบอก และระบบพกดทรงก
C
¨ É¥
รขอ
มเวÁ�° ¦
¤�A
าณ
ในก
Â�ลม
B
¤�oµ���µ��°��
งสามเวกเตอร
กเตอร (vector tr�Á¤ ºÉ°�µ¦�¼��Á�
�·�°��µ¦ Á� É¥�ACB ()(
เวกเตอร โดยใช
ารคานวณ®µ�¦
���Ê��µ��¹É�กน
A3 เวกเตอร
riple product ) ของสามเวกเตอร A
,�� )( CBA
และผลคณเชง
®¤¼nของ การคณ (associative)CB
) (1.14)
ระบบพกดในการอางอง จะชวยใหเขาใจ
·¤µ��ÉÁ�É¥ª�o°��Ä�Á°� µ¦ �Ê�³�ลาวถง
และกน ในระบบพกดฉาก ระบบพกด

8
X
Z
),,( ZYXP
rk
i
j
O
z
x
1.8.1 ระบบพกดฉาก
ระบบพกดฉาก ประกอบดวยเสนตรง 3 Á o��Ê��µ��¹É���¨ ³ ���Á¦ ¥�ª nµÂ���(axis)
�³�n��°�Â���Ê� µ¤�oª ¥� � �¬�r�x , y , และ z ตามลาดบ จดตดของแกน เรยกวาจด
กาเนด (origin) �¨ ³��³Ä�oÁª�Á�° ¦ r®�¹É�®�nª ¥� kji ˆ,ˆ,ˆ แสดงทศทางของเวกเตอรองคประกอบตามแนวแกน zyx ,, ตามลาดบ
¦ ¼��É��1.7 ภาพฉายของจดในระบบพกดฉาก
ถา ),,( ZYXP เปนจดอยในปรภมของระบบพกด¨ ���Â����Ê��3 แกน จะแสดงคาองคประกอบตามแนวแกน
เวกเตอรบอกตาแหนง r จากจดกาเนด o ไปยงจ
เวกเตอรองคประกอบ ไดเปน
r = kZjYiX ˆˆˆ
Á¤ ºÉ°�X , Y และ Z เปนคาสเกลารของภาพฉายข
ตามลาดบ ถา xA , yA และ zA เปนคาสเกลารของภาพฉายข
��¦ ¼��É�1.7 ���Ê�Áª�Á�° ¦ r�A
จะเขยนในรปของเวกเตอรอ
A
= kAjAiA zyxˆˆˆ
ทานองเดยวกน เวกเตอร B
จะเขยน ไดเปน
B
= kBjBiB zyxˆˆˆ
Y
ฉข
ด
อง
อง
งค
y
าก คาของภาพฉายของจด P
องจด P ดง¦ ¼��É1.7
P จะแสดงไดในเทอมของ
(1.15)r ลงบนแกน x , y และ z
A
ลงบนแกน x , y และ z
ประกอบ ไดเปน
(1.16)
(1.17)

9
ให C
= BA
จะแสดงการบวกเวกเตอร เปน
C
= kBAjBAiBA zzyyxxˆ)(ˆ)(ˆ)(
C
= kCjCiC zyxˆˆˆ (1.18)
Á¤ ºÉ°�� xC = )( xx BA , yC = )( yy BA และ zC = )( zz BA
และ xC , yC และ zC เปนเวกเตอรองคประกอบของ C
ตามทศของเวกเ�° ¦ r®�¹É�®�nª ¥��
kji ˆ,ˆ,ˆ ตามลาดบ แสดง ดง¦ ¼��É1.8
¦ ¼��É�1.8 การบวกเวกเตอรในระบบพกดฉาก
Áª�Á�° ¦ r®�¹É�®�nª ¥�µ¤Â���Ê� µ¤��³�Ê��µ��¹É���¨ ³ �����¼�Á�·�สเกลารของÁª�Á�° ¦ r®�¹É�®�nª ¥�³Å�o
1ˆˆ ii , 1ˆˆ jj , 1ˆˆ kk
และ ikkjji ˆˆˆˆˆˆ = 0ผลคณเชงเวกเตอร ของเวกเตอร®�¹É�®�nª ¥�Á�È�
kkjjii ˆˆˆˆˆˆ = 0
kji ˆˆˆ , ikj ˆˆˆ , jik ˆˆˆ
ผลคณเชงสเกลารของเวกเตอร A
กบ B
แสดงในเทอมของเวกเตอรองคประกอบ ในระบบพกดฉาก เปน
BA
= zzyyxx BABABA (1.19)
จาก สมการ (1.19) จะหาขนาดของเวกเตอร A
ในเทอมของเวกเตอรองคประกอบ ไดเปน
AAA
= 222zyx AAA (1.20)
10
ตวอยาง 1.2 ให A
= kji ˆˆ2ˆ3 และ B
= kji ˆ2ˆ3ˆ จงหา
ก. C
= BA
32
ข. Áª�Á�° ¦ r®�¹É�®�nª ¥�°��Áª�Á�° ¦ r�C
ค. มมของเวกเตอร C
กระทากบแกน z
วธทา ก. C
= BA
32
A
2 = )ˆˆ2ˆ3(2 kji
B
3 = )ˆ2ˆ3ˆ(3 kji
C
= BA
32 = kji ˆ8ˆ13ˆ3
ข. Áª�Á�° ¦ r®�¹É�®�nª ¥�°��Áª�Á�° ¦ r�C
Áª�Á�° ¦ r®�¹É�®�nª ¥
c =C
C
C
= 222 )8(133 = 6.15
c =6.15
ˆ8ˆ13ˆ3 kji = kji ˆ51.0ˆ85.0ˆ19.0
ค. มมของเวกเตอร C
กระทากบแกน z
z =
C
C z1cos =
6.15
8cos 1
z = 51.0cos 1
ตอบ
1.8.2 ระบบพกดทรงกระบอก
ให ),,( zyxP เปนจดในปรภม ระบบพกดฉาก สามารถจะบอกตาแหนง ของ P ได ในเทอมของ , และ z แสดง��¦ ¼��É��1.9 ให เปนภาพฉายของ
เวกเตอรบอกตาแหนง OP บนระนาบ xy , เปนมมจากแกน x ในทศทวนเขม
นาฬกา ถงระนาบ OTPM และ z เปนภาพฉายของ OP ลงบนแกน z ����Ê���nµ , และ z เปนคาพกดในระบบพกดทรงกระบอก ของจด ),,( zP แสดงดง¦ ¼��É
1.10 จะเปน

11
k
¦ ¼��É�1.9 แสดงภาพฉายของจด P ในระบบพกดทรงกระบอก
x = cos (1.21)
y = sin (1.22)คาพกดเชงผว ตามแนวรศม เปน
= 22 yx = คาคงตว (1.23)
คา เปนรศมของทรงกระบอก เทยบกบแกน z โดย z เปนแกนของทรงกร³�°������Ê����³¤�nµ�Ê�Â�n�0 ถง ( 0 )
คาพกดเชงผวในแนวระนาบ =
x
y1tan = คา���É
Á¤ ºÉ°� เปนมมระนาบรอบแกน z ดง¦ ¼��É1.10
z = �nµ���Éคาพกดเชงผว z จะขนานกบระนาบ xy ���¹Ê�Å��µ¤แนวแกน z �����Ê��ผวของ
¦ ³�µ��Ê��3 จะตดกนเปนมมฉาก ทาใหสรางแกน 3 Â���Ê��µ��¹É���Á�È�Â��� , และ
z ��¤Áª�Á�° ¦ r®�¹É�®�nª ¥Â���oª ¥�� , และ k ���µ¤Â���Ê��3 ตามลาดบ คาของมม วดเทยบกบแกน x ในทศทางทวนเขมนาฬกา มคา อยระหวาง 0 ถง 2
12
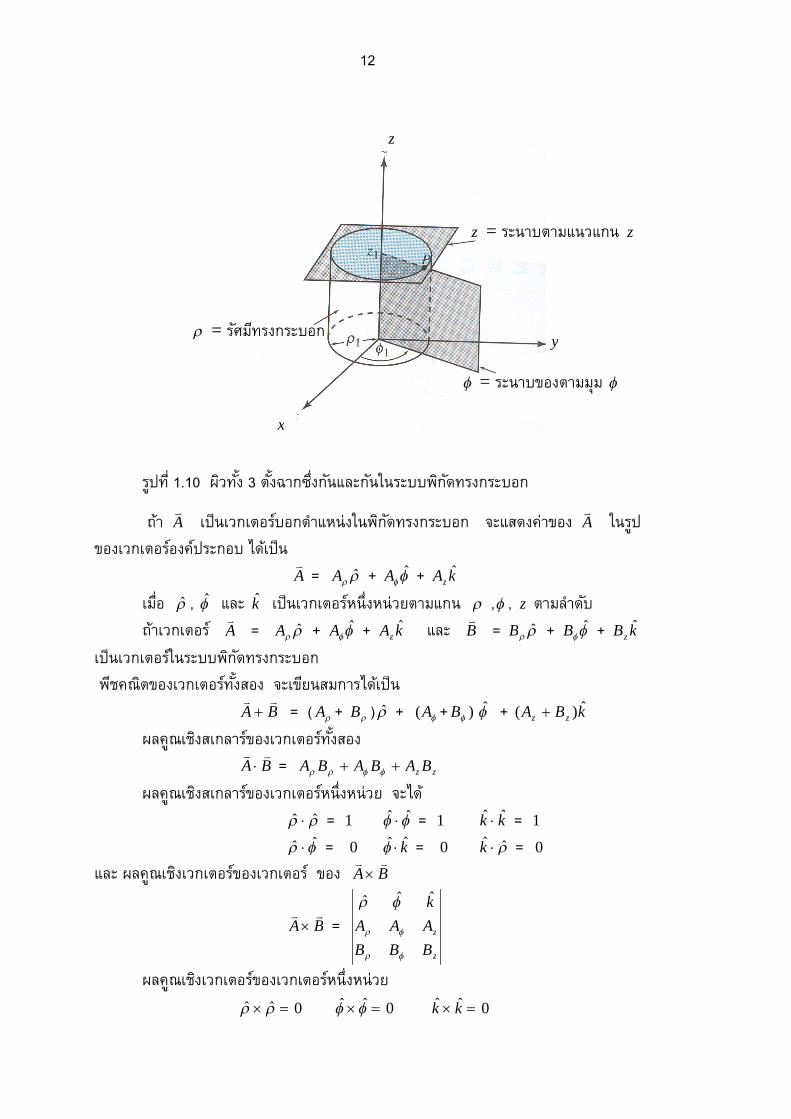
= รศมทรงกระบอก
z = ระนาบตามแนวแกน z
= ระนาบของตามมม
y
z
x
¦ ¼��É�1.10 �·ª �Ê��3 �Ê��µ��¹Éงกนและกนในระบบพกดทรงกระบอก
ถา A
เปนเวกเตอรบอกตาแหนงในพกดทรงกระบอก จะแสดงคาของ A
ในรป
ของเวกเตอรองคประกอบ ไดเปน
A
= ˆA + ˆA + kAz
ˆ
Á¤ ºÉ°�� , และ k Á�È�Áª�Á�° ¦ r®�¹É�®�nª ¥�µ¤Â���� , , z ตามลาดบ
ถาเวกเตอร A
= ˆA + ˆA + kAz
ˆ และ B
= ˆB + ˆB + kBz
ˆ
เปนเวกเตอรในระบบพกดทรงกระบอก
�¡ ���·��°�Áª�Á�° ¦ r�Êงสอง จะเขยนสมการไดเปน
BA
= ( A + B ) + A( + )B + kBA zzˆ)(
ผลคณเชงสเกลารของเว�Á�° ¦ r�Ê� °�BA
= zz BABABA
��¼�Á�·� Á�µ¦ r�°�Áª�Á�° ¦ r®�¹É�®�nª ¥ จะได
ˆˆ = 1 ˆˆ = 1 kk ˆˆ = 1
ˆˆ = 0 kˆ = 0 ˆ k = 0
และ ผลคณเชงเวกเตอรของเวกเตอร ของ BA
BA
=
z
z
BBB
AAA
k
ˆˆˆ
��¼�Á�·�Áª�Á�° ¦ r�°�Áª�Á�° ¦ r®�¹É�®�nª ¥
0ˆˆ 0ˆˆ 0ˆˆ kk

13
y
kˆˆ ˆˆˆ k ˆˆˆ k
�µ¦ Á� É¥�¦ ¼��°�Áª�Á�° ¦ r®�¹É�®นวย จากระบบพกดทรงกระบอกเปน ระบบพกดฉาก
จะหาÅ�o�µ�£µ¡ �µ¥�°�Áª�Á�° ¦ r®�¹É�®�nª ¥� และ ในระบบพกดทรงกระบอก ลงบน
Áª�Á�° ¦ r®�¹É�®�nª ¥�i และ j ��Ä�¦ ³��¡ ·���µ�����¦ ¼��É1.11 จะได
= ji ˆsinˆcos
= ji ˆcosˆsin
Á¤ ºÉ°� cosˆˆ i , sinˆˆ j , ˆ i = sin และ cosˆˆ j
¦ ¼��É�
��µ¦ Á� É¥�¦
จะหาไดในรปของเมต
�µ¦ Á� É¥�¦ ¼�
เวกเตอร A
บนแกน x , y , และ
ทานองเดยวกน ภาพฉ
และ ภาพฉายสเกลาร
cosi
cosj
sini
x
1.11 องคประ
¼�Áª�Á�° ¦ r®�¹É�
รกซ เปน
k
�°�Áª�Á�° ¦
ในระบบพกดทz จะได ภาพ
A
ายสเกลารขอ
A
ของเวกเตอร
A
sinj
กอบของ
®�nª ¥�
ˆ
ˆ
ˆ
=
r
รงกระบฉายสเก
x = A
งเวกเต
y = A
A
ลงบน
z = kA ˆ
และ
µ�¦ ³��¡ ·��
00
cossin
sincos
อกจะแสดงใลารของเวก
i = cosA
อร A
ลงบน
j = sinA
แกน z เ
= zA
ตามทศของ i และ j
�µ�ไปเปนระบบพกดทรงกระบอก
k
j
i
ˆ
ˆ
ˆ
1
0
0
นระบบพกดฉาก ไดโดยภาพฉายลงเตอร A
ลงบนแกน x เปน
sinA
แกน y เปน
cosA
ปน

14
���Ê���µ¦ Á� É¥��µ�¦ ³���¦��¦ ³�°��Á�È�¦ ³��¡ ·���µ��สมการจะเขยนในรปเมตรกซ ได
เปน
z
y
x
A
A
A
=
zA
A
A
100
0cossin
0sincos
Ä��µ�������µ¦ Á� É¥��µ�¦ ³���¡ ·���µ��Á�È�¦ ³���¦��¦ ³�°��Ä�¦ ¼�Á¤�¦ ·��r���³Å�o
zA
A
A
=
z
y
x
A
A
A
100
0cossin
0sincos
ตวอยาง 1.3 ใหเวกเตอร A
= kk ˆ2sin5ˆ
2
จงหาคาของ A
ในระบบพกดฉาก
วธทา Ã�¥Ä�oÁ¤�¦ ·��r�Á� É¥�¦ ¼���³Å�o
2
kA , 0A และ 2sin5zA
จะได 2
cos
kAx ,
2
sin
kAy และ zA sincos10
โดยการแทนคา = 22 yx ,
x
cos และ sin =
y
Á¤ ºÉ° Á� É¥�Á�È�¦ ³��¡ ·���µ���³Å�o
A
= kyx
xyj
yx
kxi
yx
kx ˆ)(
10ˆ)(
ˆ)( 222/3222/322
ตอบ
1.8.3 ระบบพกดทรงกลม
ให P เปนจดในปรภมในระบบพกดทรงกลม จะบอกตาแหนงของ P ในเทอมของ
r , และ ��Á¤ºÉ°�r เปนขนาดของ เวกเตอรบอกตาแหนง OP มม เปนคามมของ
เวกเตอรบอกตาแหนง OP เทยบกบแกน z และ เปนมมระหวางแกน x กบระนาบ OMPN และภาพฉายของ r ลงบนระนาบ xy เปน OM = sinr �µ�¦ ¼��É�1.12 จะได

15
¦ ¼��É�1.12 แสดงภาพฉายของจดในระบบพกดทรงกลม
x = cossinr (1.24)
y = sinsinr (1.25)z = cosr (1.26)
จะได 222 zyxr (1.27)
=
r
z1cos (1.28)
=
x
y1tan (1.29)
มม เปนมมในระนาบจาก การหมนจาก x ไปในทศทางทวนเขมนาฬกา รอบแกน
z ���Ê��nµ�°�� ��³¤�nµ�Ê�Â�n�0 ถง 2 มม จาก แกน z ถงแนวของเวกเตอรบอก
�ε®�n���³¤�nµÁ� É¥�Â���µ��0 ถง และ r เปนระยะจากจดกาเนดตามแนวรศม โดย
r0
เวกเตอรบอกตาแหนงเปน A
= rAr ˆ + ˆA +
ˆA Á¤ ºÉ°�r , , เปน
Áª�Á�° ¦ r®�¹É�®�nª ¥ในทศทาง ตามแกน r , ,
ระบบแกนในพกดทรงกลมจะประกอบดวย r , และ �¨ ³ ¤Áª�Á�° ¦ r®�¹É�®�nª ¥
�µ¤Â���Ê� µ¤��Á�È���r , และ ตามลาดบผลคณเช� Á�µ¦ r�°�Áª�Á�° ¦ r®�¹É�®�nª ¥���³Å�o
1ˆˆ rr 1ˆˆ 1ˆˆ
0ˆˆ r 0ˆˆ 0ˆˆ r
��¼�Á�·�Áª�Á�° ¦ r�°�Áª�Á�° ¦ r®�¹É�®�nª ¥���³Å�o
ˆˆˆ r rˆˆ ˆˆˆ r
16
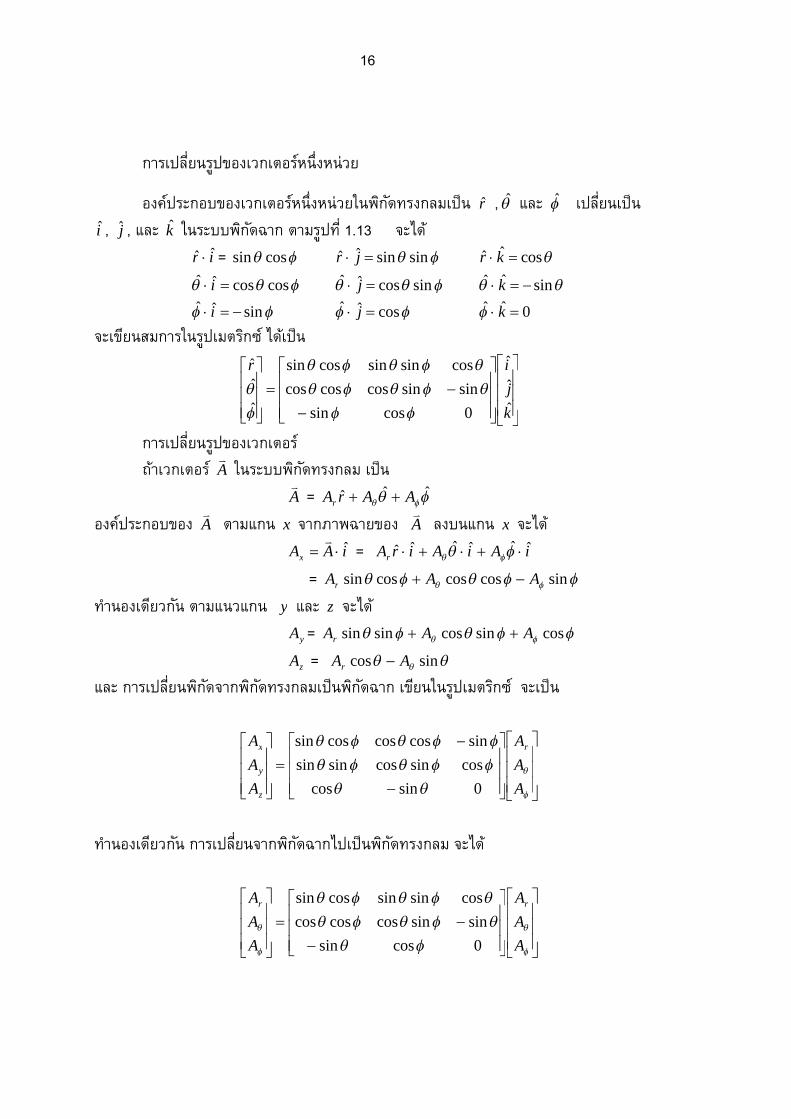
�µ¦ Á� É¥�¦ ¼��°�Áª�Á�° ¦ r®�¹É�®�nª ¥
°��r�¦ ³�°��°�Áª�Á�° ¦ r®�¹É�®�nª ¥Ä�¡ ·���¦��¤Á�È��r , และ ��Á� É¥�Á�È�
i , j , และ k ในระบบพกดฉาก ตาม¦ ¼��É1.13 จะได
ir ˆˆ = cossin sinsinˆˆ jr cosˆˆ kr
coscosˆˆ i sincosˆˆ j sinˆˆ k
sinˆˆ i cosˆˆ j 0ˆˆ k
จะเขยนสมการในรปเมตรกซ ไดเปน
k
j
ir
ˆ
ˆ
ˆ
0cossin
sinsincoscoscos
cossinsincossin
ˆ
ˆ
ˆ
�µ¦ Á� É¥�¦ ¼��°�Áª�Á�° ¦ rถาเวกเตอร A
ในระบบพกดทรงกลม เปน
A
= ˆˆˆ AArAr
องคประกอบของ A
ตามแกน x จากภาพฉายของ A
ลงบนแกน x จะได
iAAxˆ
= iAiAirAr
ˆˆˆˆˆˆ
= sincoscoscossin AAAr
ทานองเดยวกน ตามแนวแกน y และ z จะได
yA = cossincossinsin AAAr
zA = sincos AAr
¨ ³��µ¦ Á� É¥�¡ ·���µ�¡ ·���¦��¤Á�È�¡ ·���µ��Á�ยนในรปเมตรกซ จะเปน
A
A
A
A
A
A r
z
y
x
0sincos
cossincossinsin
sincoscoscossin
�ε�°�Á�¥ª ����µ¦ Á� É¥��µ�¡ ·���µ�Å�Á�È�¡ ·���¦��¤��³Å�o
A
A
A
A
A
A rr
0cossin
sinsincoscoscos
cossinsincossin
17
ก. ข.
ค.
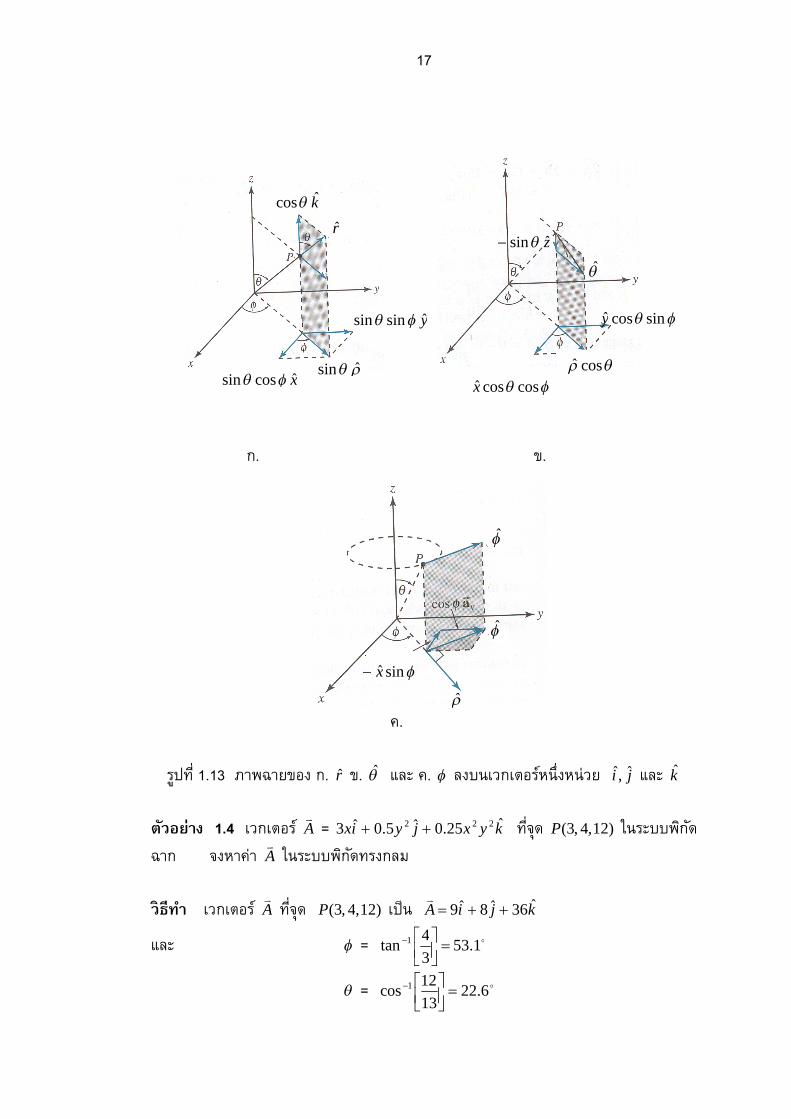
¦ ¼��É�1.13 ภาพฉายของ ก. r ข. และ ค. ����Áª�Á�° ¦ r®�¹É�®�nª ¥�� ji ˆ,ˆ และ k
ตวอยาง 1.4 เวกเตอร A
= kyxjyix ˆ25.0ˆ5.0ˆ3 222 �É�»�� )12,4,3(P ในระบบพกด
ฉาก จงหาคา A
ในระบบพกดทรงกลม
วธทา เวกเตอร A��É�»��� )12,4,3(P เปน kjiA ˆ36ˆ8ˆ9
และ = 1.533
4tan 1
= 6.2213
12cos 1
xcossin
ysinsin
ˆsin
r
kcos
sinx
coscosx
cosˆ
sincosy
cosˆ
zsin
18
แทนคา จะได
77.37rA , A = 95.2 และ A = 40.2
เวกเตอร A
ในระบบพกดทรงกลม
A
= ˆ40.2ˆ95.2ˆ77.37 r ���Éจด )1.53,6.22,13( P
ตอบ
1.9 บทสรป
ปรมาณแบงไดเปน 2 �¦ ³Á£���º°��¦ ·¤µ��ɤ�Ê���µ�¨ ³�·«�µ��Á¦ ¥�ª nµ�¦ ·¤µ�
Áª�Á�° ¦ r¨ ³��¦ ·¤µ��ɤÁ�¡ µ³��µ��Á¦ ¥�ª nµ�¦ ·¤µ� Á�µ¦ r�
ปรมาณเวกเตอร แสดงไดดวยขนาดคณกบÁª�Á�° ¦ r®�¹É�®�nª ¥�Ã�¥�ÉÁª�Á�° ¦ r®�¹É�หนวยจะ ���·«�µ��°�Áª�Á�° ¦ r�Ê��Ç��Á�n���aA ˆ
ปรมาณเวกเตอรเขยนรปแทนไดโดยเขยนเสนตรงแทนขนาดและหวลกศร แทนทศทาง
การบวกเวกเตอร ของ 2 เวกเตอรหรอมากกวา หาเวกเตอรลพธหาª ·�®�¹É���º°�เขยน
รปเวกเตอร และเวกเตอร BA
= AB
การลบเวกเตอร BA
= )( BA
เวกเตอร B
�Á�È�Áª�Á�° ¦ r�ɤ��µ�Á�nµ���B
แตมทศทางตรงกนขาม การคณเวกเตอรดวยสเกลาร AmB
����¼��³Á�È�Áª�Á�° ¦ r�ɤ��µ��Á�È��mA
จะมทศตามทศ A
มทศตรงขามกบ A
และ เปน 0 Á¤ ºÉ°� 0,0 mm และ 0m
ตามลาดบการคณเชงสเกลาร ของสองเวกเตอรไดผลลพธของการคณเปนสเกลาร
BA
= cosAB
�µ¦�¼�Á�·�Áª�Á�° ¦ r��°� °�Áª�Á�° ¦ r�Å�o�¨ ¡ �rÁ�È�Áª�Á�° ¦ r�Á¤ ºÉ°
BA
= nAB ˆsin
ระบบพกดฉาก บอกตาแหนงของเวกเตอร ดวย r = kZjYiX ˆˆˆ Á¤ ºÉ°�i , j และ
k �Á�È�Áª�Á�° ¦ r®�¹É�®�nª ¥�µ¤Â���x , y , z ตามลาดบ
ระบบพกดทรงกระบอก บอกตาแหนงเวกเตอรดวย A
= kAAA zˆˆˆ
Á¤ ºÉ°�� , และ k Á�È�Áª�Á�° ¦ r®�¹É�®�nª ¥�µ¤Â���� , , z ตามลาดบ
ระบบพกดทรงกลม บอกตาแหนงเวกเตอรดวย เปน A
= rAr ˆ + ˆA +
ˆA
Á¤ ºÉ°�r , , Á�È�Áª�Á�° ¦ r®�¹É�®�nª ¥�µ¤Â�� r , ,
�µ¦ Á� É¥�¦ ³��¡ ·���µ���¦��¦ ³�°��Á�È�¡ ·���µ��®µÄ�¦ ¼�Á¤�¦ ·��r�Å�o�

19
z
y
x
A
A
A
=
zA
A
A
100
0cossin
0sincos
�µ¦ Á� É¥�¦ ³��¡ ·���µ���¦��ลม เปนพกดฉาก หาในรปเมตรกซ ได
A
A
A
A
A
A r
z
y
x
0sincos
cossincossinsin
sincoscoscossin
1.10 คาถามทายบท
1. ให เวกเตอร A
= kji ˆˆ2ˆ4 และเวกเตอร B
= kji ˆ4ˆ4ˆ จงแสดงวาÁª�Á�° ¦ r�Ê� °��Ê��µ��¹É���¨ ³กน
2. กาหนดให เวกเตอร A
= ji 4ˆ2 และเวกเตอร B
= kj ˆ4ˆ6 จงหามมระหวางÁª�Á�° ¦ r�Ê� °���Á¤ºÉ°�
ก. ผลคณเชงเวกเตอร ( 9.41 )
ข. ผลคณเชงสเกลาร ( 9.41 )
3. กาหนดให kjA ˆ10ˆ4
และ jiB ˆ3ˆ2
จงหาภาพฉายของเวกเตอร A
ลงบน B
13/12( )4. ��®µÁª�Á�° ¦ r®�¹É�®�nª ¥�ɤ�·«�µ��»�� )2,5,2( ไปในทศทางของจด )3,5,14(
)ˆ13
5ˆ13
12ˆ( jir
5. จงแสดงวา )()( DCBA
= ))(())(( CBDADBCA
6. จงหาระยะหางระหวางจด ( 0,6
,2 ) และ )2,,1( �Á¤ºÉ°�»��É�ε®��Ä®o° ¥¼nÄ�¦ ³��¡ ·กด
ทรงกระบอก
)53.3(
7. จงหาระยะหางระหวางจด ( 0,4
,1 ) และ ),
4
3,1( �Á¤ºÉ°�»��É�ε®��Ä®o° ¥¼nÄ�¦ ³��¡ ·��
ทรงกระบอก
)2(
8. กาหนดให kjiA ˆ3ˆ2ˆ4
และ kjiB ˆˆ4ˆ3
จงหา ก. ขนาดของ BA
25 )1.31(
ข. Áª�Á�° ¦ r®�¹É�®�nª ¥Ä��·«�µ��°�� ABA
/)25( )ˆ55.0ˆ06.0ˆ84.0( kji
20
ค. เวกเตอรองคประกอบของ A
ในทศทางขนานกบ B
)ˆ27.0ˆ08.1ˆ81.0( kji
ง. เวกเตอรองคประกอบของ A�Ä��·«�µ��Ê��µ�����B
)ˆ73.2ˆ08.3ˆ19.3( kji
9. กาหนดใหระนาบ 12234 zyx ����®µÁª�Á�° ¦ r®�¹É�®�nª ¥�É�Ê��µ���¡ ºÊ��·ª Ä��·«�µ��É¡ »n�° ° กจากจดกาเนด
[ 29/)ˆ2ˆ3ˆ4( kji ]
10. จงแปลง kyx
xjxiyA ˆˆˆ
22
2
จากเวกเตอรในระบบพกดฉากไปเปนเวกเตอร
ในระบบพกดทรงกระบอก
11. จงแปลงเวกเตอร ˆcossinˆtanˆ rrrrA
จากระบบพกดทรงกลมเปนพกดฉาก
12. จงแสดงคาของเวกเตอรในระบบพกดฉาก
ก. A
= ˆcosˆsin
ข. H
= ˆ
1